JP6033606B2 - Massage machine - Google Patents
Massage machine Download PDFInfo
- Publication number
- JP6033606B2 JP6033606B2 JP2012178190A JP2012178190A JP6033606B2 JP 6033606 B2 JP6033606 B2 JP 6033606B2 JP 2012178190 A JP2012178190 A JP 2012178190A JP 2012178190 A JP2012178190 A JP 2012178190A JP 6033606 B2 JP6033606 B2 JP 6033606B2
- Authority
- JP
- Japan
- Prior art keywords
- leg
- treatment
- actuator
- speed
- leg support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000011282 treatment Methods 0.000 claims description 302
- 238000006073 displacement reaction Methods 0.000 claims description 95
- 238000005452 bending Methods 0.000 claims description 13
- 230000004044 response Effects 0.000 claims description 10
- 210000002414 leg Anatomy 0.000 description 441
- 238000004898 kneading Methods 0.000 description 144
- 230000007246 mechanism Effects 0.000 description 115
- 230000008859 change Effects 0.000 description 49
- 238000001514 detection method Methods 0.000 description 35
- 210000000689 upper leg Anatomy 0.000 description 27
- 238000000034 method Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 14
- 210000003127 knee Anatomy 0.000 description 13
- 208000003251 Pruritus Diseases 0.000 description 9
- 244000309466 calf Species 0.000 description 9
- 230000008602 contraction Effects 0.000 description 9
- 230000007423 decrease Effects 0.000 description 9
- 238000007599 discharging Methods 0.000 description 9
- 230000000694 effects Effects 0.000 description 7
- 238000003825 pressing Methods 0.000 description 6
- 210000001217 buttock Anatomy 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000007803 itching Effects 0.000 description 4
- 210000000245 forearm Anatomy 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000010079 rubber tapping Methods 0.000 description 2
- 238000011272 standard treatment Methods 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 230000037237 body shape Effects 0.000 description 1
- 230000010261 cell growth Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000005722 itchiness Effects 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000012559 user support system Methods 0.000 description 1
Images






















Landscapes
- Rehabilitation Tools (AREA)
- Massaging Devices (AREA)
Description
本発明は、被施療者の着座する座部に対し傾動や移動する脚支持部を用いて、被施療者の脚の曲げや伸ばしによるストレッチ施療を実行できるマッサージ機に関する。 The present invention relates to a massage machine that can perform stretch treatment by bending or stretching a leg of a user using a leg support that tilts or moves with respect to a seat on which the user is seated.
被施療者の身体を支持しつつマッサージ動作を実行する椅子型のマッサージ機は、通常、その背もたれ部に設けられる施療子としての揉み玉で、背もたれ部にもたれた被施療者に対し揉みや叩き等の施療を行う仕組みを有しているが、この他、被施療者の脚部分に対しても所定の施療が行えるよう、施療機構を内蔵した脚支持部(オットマン)を設けたものがある。 A chair-type massage machine that performs a massage operation while supporting the body of the user is usually a massaging ball as a treatment element provided on the backrest, and itching or hitting the user leaning on the backrest In addition to this, there is a device provided with a leg support portion (ottoman) with a built-in treatment mechanism so that predetermined treatment can be performed on the leg portion of the user. .
さらに、脚に対しては、揉みやローリング等の施療の他に、脚の筋肉のストレッチを行うものも実用に供されていた。このような脚のストレッチ施療を実行可能とするマッサージ機の一例として、特開2007−282790号公報に開示されるものがある。 Furthermore, for the legs, in addition to the treatment such as itching and rolling, those that stretch the muscles of the legs have been put to practical use. An example of a massage machine that can perform such leg stretching treatment is disclosed in Japanese Patent Application Laid-Open No. 2007-282790.
従来の脚のストレッチ施療を行えるマッサージ機は、前記特許文献に示される構成とされており、脚を支えるオットマンで脚を拘束しつつ傾けたり伸縮させたりして脚のストレッチを行う仕組みとなっているが、オットマンの移動量が所定値なので、被施療者の脚の支え状態(脚の太さの差異、ズボン越しか素足か等)によって、被施療者の受ける感覚が一定とならず商品性が劣る、という課題を有していた。 A conventional massage machine that can perform leg stretching treatment is configured as shown in the above-mentioned patent document, and it is a mechanism that stretches the leg by tilting and stretching while restraining the leg with an ottoman that supports the leg. However, since the amount of movement of the ottoman is a predetermined value, the sense that the user receives will not be constant depending on the support state of the user's legs (difference in the thickness of the legs, whether the pants are bare feet, etc.) Had the problem of being inferior.
本発明は前記課題を解消するためになされたもので、オットマンの移動速度を検出して、移動速度の鈍り具合を施療強度に対応付けることで、より効果的な脚のストレッチを実現可能にするマッサージ機を提供することを目的とする。 The present invention has been made in order to solve the above-mentioned problems, and it is possible to realize a more effective leg stretching by detecting the moving speed of the ottoman and associating the dullness of the moving speed with the treatment intensity. The purpose is to provide a machine.
本発明に係るマッサージ機は、座部と背もたれ部を備え、座部の前側に脚を挟持し支持する脚支持部が配設されるマッサージ機において、脚支持部の座部に対する傾斜角度を変化させる傾動手段と、脚支持部の傾斜位置を検出する変位検出手段と、脚支持部の傾動の移動速度を検出する速度検出手段と、被施療者の脚を挟持した状態で、脚支持部を傾動させる脚曲げ施療の施療指示手段と、脚曲げ施療における施療強度を複数段階入力可能な施療強度指示手段と、を備え、強度指示される施療強度に応じた傾動の移動速度の目安値を予め設定し、上記強度指示及び/又は施療指示を受けて、脚を挟持した状態で脚支持部を傾動させるとともに、傾動の移動速度が目安値に達した際に、強度指示される施療強度に応じた傾動停止位置を決定するものである。 The massage machine according to the present invention includes a seat portion and a backrest portion, and in a massage machine in which a leg support portion that supports the leg by holding the leg is disposed on the front side of the seat portion, the inclination angle of the leg support portion with respect to the seat portion is changed. Tilting means, displacement detecting means for detecting the tilt position of the leg support part, speed detecting means for detecting the moving speed of tilting of the leg support part, and the leg support part in a state where the leg of the user is sandwiched A treatment instruction means for tilting leg bending treatment and a treatment intensity instruction means capable of inputting treatment intensity in a plurality of stages for leg bending treatment, and a reference value of the moving speed of the tilt according to the treatment intensity indicated by the strength is previously provided. In response to the strength instruction and / or treatment instruction, when the leg support is tilted with the leg clamped, and when the movement speed of the tilt reaches the reference value, the strength is instructed. Determine the tilt stop position Than is.
また、本発明に係るマッサージ機は、座部と背もたれ部を備え、座部の前側に脚を挟持し支持する脚支持部が配設されるマッサージ機において、脚支持部には脚受部が備えられ、脚受部の位置を脚の長手方向に沿って、座部に対し離れる向きと近づく向きとに移動可能な進退移動手段と、脚受部の進退位置を検出する変位検出手段と、脚受部の座部から離れる向きへの移動速度を検出する速度検出手段と、被施療者の脚を挟持した状態で、脚受部を座部から離れる向きへ移動させる脚伸ばし施療の施療指示手段と、脚伸ばし施療における施療強度を複数段階入力可能な施療強度指示手段と、を備え、強度指示される施療強度に応じた移動速度の目安値を予め設定し、上記強度指示及び/又は施療指示を受けて、脚を挟持した状態で脚支持部を移動させるとともに、移動速度が目安値に達した際に、強度指示される施療強度に応じた移動停止位置を決定するものである。 In addition, the massage machine according to the present invention includes a seat support portion and a backrest portion, and a leg support portion that holds and supports the leg on the front side of the seat portion. An advancing / retreating movement means provided to move the position of the leg receiving portion along the longitudinal direction of the leg in a direction away from and toward the seat; and a displacement detecting means for detecting the advancing / retreating position of the leg receiving portion; Speed detection means for detecting the moving speed of the leg receiving part in a direction away from the seat part, and a treatment instruction for leg extension treatment for moving the leg receiving part in a direction away from the seat part while holding the leg of the user Means and treatment intensity instruction means capable of inputting treatment intensity in a plurality of stages for leg extension treatment, and a reference value of the moving speed according to the treatment intensity indicated by the intensity is set in advance, and the intensity indication and / or treatment is performed. In response to the instructions, hold the leg It causes the movement, when the moving speed reaches the guide value, which determines the movement stop position corresponding to the treatment intensity strength indication.
た、本発明に係るマッサージ機は、座部と背もたれ部を備え、座部の前側に脚を挟持し支持する脚支持部が配設されるマッサージ機において、脚支持部には脚受部が備えられ、脚受部の位置を脚の長手方向に沿って、座部に対し離れる向きと近づく向きとに移動可能な進退移動手段と、脚支持部の座部に対する傾斜角度を変化させる傾動手段と、脚受部の進退位置を検出する変位検出手段と、脚受部の座部から離れる向きへの移動速度を検出する速度検出手段と、被施療者の脚を挟持した状態で、脚受部を座部から離れる向きへ移動させる進退移動と、脚支持部の座部に対する傾斜角度を変化させる傾動を組み合わせた脚ストレッチ施療の施療指示手段と、脚ストレッチ施療における施療強度を複数段階入力可能な施療強度指示手段と、を備え、強度指示される施療強度に応じた移動速度の目安値を予め設定し、上記強度指示及び/又は施療指示を受けて、脚を挟持した状態で脚支持部を傾動および移動させるとともに、移動速度が目安値に達した際に、強度指示される施療強度に応じた傾動および/または移動の停止位置を決定するものである。 In addition, the massage machine according to the present invention includes a seat support portion and a backrest portion, and a leg support portion is provided on the front side of the seat portion to sandwich and support the leg. An advancing / retreating movement means provided to move the position of the leg receiving portion in a direction away from and toward the seat along the longitudinal direction of the leg, and a tilting means for changing an inclination angle of the leg support with respect to the seat And a displacement detecting means for detecting the advancing / retreating position of the leg receiving section, a speed detecting means for detecting the moving speed of the leg receiving section in a direction away from the seat, and a leg holder in a state where the leg of the user is sandwiched. Treatment instruction means for leg stretch treatment that combines forward and backward movement to move the part away from the seat part and tilting to change the inclination angle of the leg support part with respect to the seat part, and treatment strength in leg stretch treatment can be input in multiple stages A treatment intensity instruction means The reference value of the movement speed corresponding to the treatment intensity indicated by the strength is set in advance, and the leg support portion is tilted and moved in response to the strength instruction and / or the treatment instruction, and the movement speed is determined. When the value reaches the reference value, the stop position of the tilting and / or movement according to the treatment intensity indicated by the intensity is determined.
また、本発明に係るマッサージ機は、必要に応じて、脚を挟持した状態の解除のタイミングを、移動速度に基づき決定するものである。 In addition, the massage machine according to the present invention determines the release timing of the state in which the leg is sandwiched as needed based on the moving speed.
また、本発明に係るマッサージ機は、必要に応じて、移動速度の目安値は、複数段階の施療強度に各々対応して、設定されるものである。 Moreover, as for the massage machine which concerns on this invention, the guide value of moving speed is set corresponding to each treatment intensity | strength of several steps as needed.
また、本発明に係るマッサージ機は、必要に応じて、移動速度の目安値は1つとする。 In addition, the massage machine according to the present invention has one guide value for the moving speed as necessary.
また、本発明に係るマッサージ機は、必要に応じて、移動速度の目安値に達した時点の移動量に基づいて停止位置を決定するものである。 In addition, the massage machine according to the present invention determines the stop position based on the movement amount at the time when the reference value of the movement speed is reached, if necessary.
このように本発明によれば、脚曲げや脚伸ばし等の脚へのストレッチの施療の際に、被施療者の脚の脚支持部への支持状態のいかんにかかわらず、選択された施療強度に適したストレッチ施療を受けることが出来る。 As described above, according to the present invention, in the treatment of stretching the leg such as leg bending or leg stretching, the treatment intensity selected regardless of the support state of the leg support portion of the user's leg. Stretch treatment suitable for
なお、本発明の実施形態で説明される目安値とは絶対的な値を指す場合だけでなく、相対的な値(初期値(無負荷時)からの鈍化度合い等)を示すことも含まれる。 It should be noted that the reference value described in the embodiment of the present invention includes not only the case of indicating an absolute value but also the indication of a relative value (such as the degree of blunting from the initial value (no load)). .
(本発明の第1の実施形態)
以下、本発明の第1の実施形態に係るマッサージ機を前記図1ないし図11に基づいて説明する。
前記各図において本実施形態に係るマッサージ機1は、着座した被施療者を支える椅子状のものであり、詳細には、床面上に載置されて椅子全体を安定的に支持する基台部11と、この基台部11の上方で被施療者の臀部を支える座部12と、この座部12の後側で被施療者の背中を支える背もたれ部13と、座部12の左右両側で被施療者の肘や前腕部を支える肘掛部14と、座部12の前側で被施療者の脚を支える脚支持部15と、マッサージ動作に係る各種操作入力を受付けるリモコン30と、搭載されている複数の施療機構によるマッサージ動作を操作入力や記録情報等の内容に基づいて制御する制御部40とを備える構成である。
(First embodiment of the present invention)
Hereinafter, a massage machine according to a first embodiment of the present invention will be described with reference to FIGS. 1 to 11.
In each of the drawings, the massage machine 1 according to the present embodiment is a chair-like body that supports a seated user, and in detail, is a base that is placed on the floor and stably supports the entire chair.
前記基台部11は、椅子各部をなす前記座部12、背もたれ部13、肘掛部14、及び脚支持部15を一体に取付けられてこれらを支持するものである。また、前記座部12は、基台部11に対し座面の傾斜角度を調整可能として取付けられ、座面にて被施療者の臀部や太腿部を支えつつ内蔵の施療機構でマッサージを実行するものであり、この施療機構として、空気の給排で動作する臀部用エアセル71、及び太腿部用エアセル72を備える構成である。これらエアセルを空気の給排で動作させるエアポンプ70が座部12下側のスペースに配設される。
The
臀部用エアセル71や太腿用エアセル72は、マッサージ機能以外にも、被施療者の体を昇降させたりクッションとしての機能を有する。
In addition to the massage function, the
前記背もたれ部13は、人の背中形状に合せた表面形状とされて前記基台部11及び座部12に対し傾斜角度を調整可能として配設され、その内部に、マッサージを実行する施療機構を備える構成である。
The
背もたれ部13内部には、施療子としての左右一対の揉み玉51とこれを動作させる駆動機構部60が一体となったメカユニット50と、このメカユニット50を背もたれ部13上下方向に移動可能とし且つ他方向への動きは拘束して支持する左右一対のガイドレール20と、前記エアポンプ70による空気の給排で動作する背中用エアセル73及び腰用エアセル74と、この背もたれ部13の形状を内部から維持する枠状のフレーム17とがそれぞれ配設される構成である。このうちメカユニット50、背中用エアセル73、及び腰用エアセル74が、それぞれマッサージを実行する施療機構をなす。
Inside the
なお、この背もたれ部13の左右両側部には、被施療者に面する内面側にエアセル等の施療機構を設けた一対の側壁部を突出配設して、被施療者の上腕部等に対して側方からマッサージを行えるようにすることもできる。
In addition, a pair of side wall portions provided with a treatment mechanism such as an air cell on the inner surface facing the user is provided on both the left and right sides of the
前記メカユニット50は、揉み、叩き等の刺激を被施療者に与える施療子としての左右一対の揉み玉51と、これら揉み玉51をそれぞれ突出状態で支持する左右一対の揉み玉支持アーム52と、この揉み玉支持アーム52を介して揉み玉51を揉み、叩き等のマッサージ動作に対応させて駆動する駆動機構部60と、背もたれ部上下方向に直交する軸線を中心として駆動機構部60を傾動可能に支持するベース部54とを備える構成である。
The
前記駆動機構部60は、ベース部54に対し傾動可能に支持されるハウジング61と、このハウジング61と一体に配設され、制御部40の制御に基づいて揉み玉51に揉み動作を行わせるための駆動力を発生させる揉みモータ62と、同じくハウジング61と一体に配設され、制御部40の制御に基づいて揉み玉51に叩き動作を行わせるための駆動力を発生させる叩きモータ64と、ハウジング61に内蔵されて、各モータからの運動を揉み玉支持アーム52を介して揉み玉51に伝達する揉み機構及び叩き機構(図示を省略)とを備える、公知のマッサージ機に用いられるものと同様の機構である。
The
なお、揉み機構は、制御部40の制御に基づく揉みモータ62の回転で揉み玉支持アーム52が連続して揺れる状態を生じさせるものである。揉み玉支持アーム52の一端部に取付けられた揉み玉51は、揉み玉支持アーム52の動きに伴い、連続する軌跡を描きつつ上下、左右及び前後に揺動することで、施療動作としての揉みを実現できる。
The stagnation mechanism causes the stagnation
揉みの施療における揉み玉51の被施療者に対する揺動の変位は、揉みモータ62の回転作動の結果としての、揉み機構で揉み玉支持アーム52を駆動する駆動軸(図示を省略)の回転角度変位と一対一に対応していることから、駆動軸の変位を変位検出手段としてのエンコーダ65を用いて検出することで、制御部40で揉み玉51の揺動状態、すなわち揉み玉位置の変化を把握することができる。エンコーダ65は、駆動機構部60のハウジング61に内蔵され、ハウジング61側に固定されるセンサ部と、駆動軸側に取付けられるスケール部との組合せで構成され、センサ部で駆動軸と共に動くスケール部の回転角度変位を検出する、公知のロータリーエンコーダであり、制御部40に駆動軸の変位に係る信号を出力する。
また、叩き機構は、叩きモータ64の回転により、揉み玉支持アーム52を所定位置を中心に揺動させるものであり、揉み玉支持アーム52の揺動でアーム一端部の揉み玉51も前後に揺動(往復動)して、施療動作としての叩きを実現する仕組みである。
The displacement of the swirling
The hitting mechanism swings the kneading
前記ベース部54は、駆動機構部60を傾動可能に支持するものであり、この他、制御部40の制御に基づいて、メカユニット昇降用の駆動力を発生させる昇降モータ57と、駆動機構部60を傾動させる駆動力を発生させる進退モータ58とを備える構成である。
The
進退モータ58は、制御部40の制御に基づいて、連動する小歯車58aを回転させ、この小歯車58aと噛合している駆動機構部60側の歯部67を移動させることで、駆動機構部60をベース部54に対し傾動させ、これにより揉み玉51位置を被施療者に対し進退させ、揉み玉51の被施療者側への突出量を調整するものである。
The advance /
揉み玉51の被施療者に対する進退方向の変位は、進退モータ58の回転作動の結果としての駆動機構部60の傾動に係る角度変位と一対一に対応していることから、駆動機構部60の角度変位を変位検出手段としてのエンコーダ55を用いて検出することで、制御部40で駆動機構部60の傾動状態変化と共に、揉み玉51の進退状態、すなわち突出量の変化を把握することができる。エンコーダ55は、ベース部54に固定されるセンサ部55aと、駆動機構部60のハウジング61に取付けられるスケール部55bとの組合せで構成され、センサ部55aで駆動機構部60と共に動くスケール部55bの傾動変位を検出する、一種のロータリーエンコーダであり、制御部40に駆動機構部60の角度変位に係る信号を出力する。
The displacement of the kneading
メカユニット50は、ベース部54の側端部を一対のガイドレール20にそれぞれ上下走行可能に支持されることで、ガイドレール20に挟まれる配置状態となり、メカユニット50全体としてガイドレール20に沿って移動可能とされる構成である。そして、制御部40による制御に基づき、昇降モータ57が作動してベース部54がガイドフレーム20を走行する状態となることで、ベース部54を含むメカユニット50全体が、ガイドフレーム20に沿って背もたれ部13の上下に移動することとなり、背もたれ部13における揉み玉51の位置(揉み玉による施療対象部位)を上下に変えられる仕組みである。
The
そして、メカユニット50は、設定されたマッサージの内容に応じて、制御部40による制御で、上記のように背もたれ部13の上下に移動し、揉み玉51の上下位置を調整されると共に、進退モータ58の作動による揉み玉51と駆動機構部60の傾動で、揉み玉51の被施療者側への突出量を調整されて、揉み玉51をマッサージの対象箇所に位置させる。揉み玉51の移動後、又はこうした揉み玉51の移動と並行して、制御部40が、マッサージの種類に応じて、メカユニット50における駆動機構部60の揉み、叩き用のモータを作動させ、揉み玉51に設定された揉みや叩き等のマッサージに対応した動きを行わせることとなる。
The
前記肘掛部14は、座部12の両側に位置して基台部11と一体に連結し、背もたれ部13がリクライニング角度を変化させたり、座部12が傾動しても、被施療者の前腕を安定的に支持するよう形成される構成である。この肘掛部14にも、前記エアポンプ70による空気の給排で動作するエアセルを配設して、被施療者の前腕部に対しマッサージを行える構成としてかまわない。
The
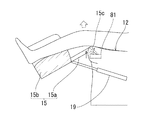
前記脚支持部15は、座部12の前側に位置し、座部12前端付近を中心として傾動可能に配設され、座部下側の第2アクチュエータ19により傾斜角度を調整されるものである。詳細には、脚支持部15は、座部12に対し傾動可能に取付けられる基礎部15aと、この基礎部15aの表面側部分に脚長手方向へ移動可能として配設され、脚に接する脚受部15bと、この脚受部15bに内蔵され、前記エアポンプ70による空気の給排で膨縮動作する施療機構としての脚用エアセル75、76、77、78とを備える構成である。
The
前記第2アクチュエータ19は、固定部分に対し可動部分を直線移動させることで全体として所定範囲内で伸縮して長さを変化させる機構を有してなり、座部12の下側で一端部の位置を固定状態とされる一方、他端部が脚支持部15の裏面側に当接可能とされ、伸縮による他端部の位置変化に伴って、脚支持部を傾動させる構成である。つまり、本実施例においては、この第2アクチュエータが脚支持部15の傾動手段となる。
The
この第2アクチュエータ19と一体に、第2アクチュエータ19の可動部分の変位、すなわち伸縮の変位を、所定の単位量の変位ごとの信号出力に基づき検出する、変位検出手段としてのリニアエンコーダが配設される。
A linear encoder as a displacement detecting means is provided integrally with the
脚支持部15は、この第2アクチュエータ19の伸縮動作により、脚支持部15の裏面側に当接する第2アクチュエータ19他端部の位置が変ることで、座部12前端の軸部を中心として傾動し、傾斜角度を変化させる仕組みである。脚支持部15の傾動に係る変位は、第2アクチュエータ19の伸縮による変位と一対一に対応していることから、第2アクチュエータ19の伸縮変位を変位検出手段としてのリニアエンコーダを用いて検出することで、制御部40で第2アクチュエータ19の伸縮状態変化と共に、脚支持部15の傾動状態変化を把握することができる。なお、脚支持部15の傾動状態の把握にあたっては、直接脚支持部の傾斜角度変化をロータリーエンコーダ等の変位検出手段で取得するようにしてもよい。
The position of the other end of the
このようなエンコーダーは、傾動位置を把握することで傾斜位置を検出する変位検出手段となるだけでなく、傾斜位置の変化により傾動の移動速度を検出することが可能なので傾動の移動速度を検出する速度検出手段となる。 Such an encoder not only serves as a displacement detecting means for detecting the tilt position by grasping the tilt position, but also detects the tilt moving speed by changing the tilt position, so that the tilt moving speed is detected. It becomes a speed detection means.
脚支持部15のうち脚受部15bは、被施療者の脚が入る凹状部分を生じさせた略半円筒状に形成され、座部12前端に取付けられた基礎部15aに対し脚長手方向へ移動可能に配設される構成である。脚受部15bの凹状部分を挟んで対向する側面部には、脚用エアセル75、76、77、78が、膨張状態で左右の脚のふくらはぎ部分をそれぞれ押圧してマッサージが行えるように、左右各々で対をなす配置として内蔵される。
The
この脚支持部15には、脚用エアセル75、76、77、78の他、脚長手方向に移動しつつ脚を押圧するローラ等の他の施療機構を配設するようにしてもかまわない。
In addition to the
被施療者は、左右の脚受部15bにそれぞれ左右の脚をふくらはぎ部分を中心として支持させることとなる。この支持状態で、左右でそれぞれ脚を挟んで対向する脚用エアセル75、76、77、78をいずれも膨張させると、脚のふくらはぎ部分を両側から押圧して挟持できる仕組みである。
The user supports the left and right legs around the calf portion by the left and right
すなわち、脚用エアセル75、76、77、78は、空気吸排に伴う膨張、収縮による直接的なマッサージ機能以外に、膨張状態の押圧力を利用して脚を挟持し、脚の想定外の動きを抑える挟持手段としての機能も有する。なお、この挟持する手段としては、エアセルの膨張収縮を利用するもの以外に、押圧片を機械的に移動させて脚を挟持する機構等でもよく、エアセルに限られるものではない。
That is, the
また、必ずしも脚の両側から脚用エアセル等の挟持手段を動作させて脚を挟持する構成に限らず、脚を挟んで対向する脚受部の左右の側壁のいずれか片側のみから脚を押圧し、脚受部の反対側の側壁に脚を押付けるようにして、挟持状態を得る構成としてもかまわない。 In addition, the leg is not necessarily configured to operate the leg air cell or the like from both sides of the leg to clamp the leg, and the leg is pressed only from one of the left and right side walls of the leg receiving portion facing each other across the leg. The sandwiching state may be obtained by pressing the leg against the side wall on the opposite side of the leg receiving portion.
このような構成において、脚用エアセル75、76、77、78が被施療者の脚を狭持して、脚を脚支持部15上に保持固定した状態で、第2アクチュエータ19を伸縮させ、脚支持部15を上下方向に傾動させると脚曲げ施療を行うことが出来る。なお、脚曲げ施療とは脚支持部を下方向に傾動させる動作による太腿の表側をストレッチさせる施療と上方向の傾動によって太腿の裏側をストレッチする施療のいずれをも含む。
In such a configuration, the
また、脚支持部15における脚受部15bを基礎部15aに対し座部12から遠ざかる方向に移動させると、脚伸ばし施療を行うことが出来る。
Moreover, when the
脚支持部15の脚受部15bを基礎部15aに対し脚長手方向に移動させる機構としては、脚受部15bの基礎部15aに対する位置変化を検出するための変位検出手段15dと共に、所定の第1アクチュエータ18を用い、この第1アクチュエータ18の作動を制御部40で制御するようにしている。この第1アクチュエータ18は、モータや流体圧シリンダなどの公知のアクチュエータであり、また、変位検出手段15dは、公知のリニアエンコーダ等であり、詳細な説明を省略する。
As a mechanism for moving the
また、上記脚曲げ施療と脚伸ばし施療を組み合わせた脚のストレッチ施療を実行することができる。 Moreover, the leg stretch treatment which combined the said leg bending treatment and the leg extension treatment can be performed.
脚のストレッチ施療において、脚曲げ施療と脚伸ばし施療を組み合わせる場合、上述の脚支持部を下方向に傾動させる動作による太腿の表側をストレッチさせる施療と上方向の傾動によって太腿の裏側をストレッチする施療のいずれの施療も組み合わせることが可能であるが、下記の実施形態では、脚支持部を上方向に傾動させつつ脚受部を座部12から遠ざかる方向に移動させる太腿の裏側のストレッチ施療につき説明する。
When combining leg bending treatment and leg stretching treatment in leg stretching treatment, the back side of the thigh is stretched by the treatment of stretching the front side of the thigh by tilting the above-mentioned leg support part downward and tilting upward. Any of the treatments to be performed can be combined, but in the following embodiment, the leg support is tilted upward and the leg support is moved in the direction away from the
脚用エアセル75、76、77、78が被施療者の脚を狭持して、脚を脚支持部15上に保持固定した状態で、第2アクチュエータ19を伸長させ、脚支持部15を上向きに傾動させ、且つ脚支持部15における脚受部15bを基礎部15aに対し座部12から遠ざかる方向に移動させると、脚の裏側部分(脚裏部)に伸びによるストレッチ効果を付与できる。すなわち、脚支持部15を用いて脚裏部へのストレッチ施療を行える仕組みとなっている。なお、ここでの脚裏部とは、太腿部の裏、脹脛、及び膝裏の、一部又は全部を指すものである。
With the
脚支持部15の傾動においては、脚を脚支持部15上に拘束するだけではなく、脚を挟持している脚受部15bの位置を座部から離れる向きに適宜移動させて、脚の曲り具合を調整することで、膝に無理な力が加わらないようにして膝の浮上がりを確実に抑え、脚のストレッチ効果をより高めることができる。
In tilting the
なお、脚受部15bの移動状態の把握にあたっては、直接脚受部15bの位置変化を変位検出手段15dで取得する他に、第1アクチュエータ18の可動部分の変位を、これと一体に設けられたリニアエンコーダ等の変位検出手段で取得するようにしてもよい。すなわち、脚受部15bは、第1アクチュエータ18の動作により、脚支持部15の基礎部15aに対して位置を変えることで、座部12に対して移動する仕組みであり、脚受部15bの移動に係る変位は、第1アクチュエータ18の作動による伸縮変位と一対一に対応することから、第1アクチュエータ18の変位を一体の変位検出手段を用いて検出することで、制御部40で第1アクチュエータ18の状態変化と共に、脚受部15bの移動状態変化を把握することができる。
In order to grasp the movement state of the
さらに、脚支持部15の上向きの傾動に際し、脚の大腿部を挟持する別の挟持用エアセル79を、座部12の両側に配設する構成とすることもできる(図8参照)。この場合、座部12の両側の挟持用エアセル79で大腿部を挟持した状態で、脚支持部15が上向きに傾動して、脚を伸張させることで、エアセル79で挟持された太腿部が座部12の座面から浮き上がるのを抑えられ、脚支持部15の傾動による脚の伸張がより一層促されて、脚裏のストレッチ効果をより高めることができる。
Further, when the
一方、脚用エアセルによる脚の挟持状態で、脚支持部15を上方から下方に傾動させることもでき、この場合には、脚の他部分に対して伸びによるストレッチ効果を与えられる。
On the other hand, the
前記リモコン30は、マッサージ機に対する各種操作入力を受付ける多数のスイッチや表示部を備え、マッサージ機1の側部におけるスタンド16に着脱自在に設置され、マッサージに係る操作入力を制御部40に送信するものである。なお、リモコン30のスイッチや表示部の位置を被施療者にとって最適位置とするために、スタンド16の位置は調整可能となっている。
The
前記制御部40は、あらかじめ被施療者の身体各部位置検出を実行して得られた検出結果に基づいて、施療機構やマッサージ機の他の各可動部分を被施療者に対応した状態に調整すると共に、施療機構や他の各可動部分に対し、リモコン操作やあらかじめ記録設定された施療内容、また前記検出結果の情報に基づいて、適切な施療の実行のための制御を行うものである。
The
この制御部40は、そのハードウェア構成として、CPUやメモリ、入出力インターフェース等を備えるコンピュータとなっており、メモリ等に格納されるプログラムにより、コンピュータを制御部40として動作させる仕組みである。この制御部40をなすコンピュータは、CPUやメモリ、ROM等を一体的に形成されたマイクロコンピュータとしてもかまわない。
The
この制御部40をなすコンピュータのユニットは、座部12直下等のマッサージ機1内部の所定のスペースに配設され、リモコン30と通信可能な状態とされると共に、メカユニット50の各種モータや、背もたれ部13や脚支持部15を傾動させるアクチュエータ、エアポンプ70や給排気制御機構とそれぞれ電気的に接続され、被施療者の身体各部位置検出の際にはあらかじめ設定された位置検出用プログラムに基づく制御信号出力により、また、マッサージ実行の際には設定されたマッサージのデータに基づく制御信号出力により、これらの駆動機構の作動を制御する。
The computer unit constituting the
加えて、制御部40は、メカユニット50や各アクチュエータの変位量を出力するエンコーダ等の信号出力手段とも電気的に接続されており、メカユニット50の状態や、背もたれ部13及び脚支持部15の傾斜等の状態を把握しつつ、モータやアクチュエータ等の駆動手段の作動制御を行うこととなる。
In addition, the
特に、脚支持部15を傾動させる第2アクチュエータ19の作動状態を制御するにあたり、制御部40は、脚裏部へのストレッチ施療としての脚支持部15の傾動と同期した脚受部15bの移動における、ストレッチの施療強度に応じて第1アクチュエータ18に加わる負荷の変化と、この第1アクチュエータ18の作動に係る所定の物理量の変化との対応関係をあらかじめ把握して、制御の目安とする施療強度に対応する前記物理量の目安値を設定し、第1アクチュエータ18の作動の間、前記物理量を取得して、物理量が前記目安値に達した際に、第2アクチュエータ19に作動停止や作動速度低下等の、これまでの作動状態からの変化を起させる制御指令の送出を実行するようにしている。
In particular, in controlling the operation state of the
ストレッチ施療において、脚受部15bの移動に基づく施療強度の増大変化と脚受部15bの移動速度の減少変化とが、強い関係性を示すことがわかっており、この脚受部15bの移動の状況を各施療機構の作動制御に利用すれば、所定時点の実際の施療強度を的確に把握して、施療強度に応じた作動制御が見込めることとなる。このため、脚受部15bの移動を生じさせる機構として第1アクチュエータ18を用い、この第1アクチュエータ18の作動に係る物理量を制御の目安としている。
In the stretch treatment, it is known that an increase change in treatment intensity based on the movement of the
上記の第1アクチュエータ18の作動に係る所定の物理量としては、変位検出手段15dより得られる、脚受部15bの変位とこの変位の検出間隔とからの速度算出により取得した、脚受部15bの移動速度を用いている。
The predetermined physical quantity related to the operation of the
そして、制御部40は、脚裏部へのストレッチ施療における施療強度を、マッサージ機の使用者、具体的には被施療者、に選択可能としてあらかじめ複数段階、例えば、強中弱の三段階設定しており、こうした複数段階の強度の中から使用者に選択されたものを目安とする施療強度として、この目安の強度に対応する前記物理量の目安値、本実施形態では脚受部15bの移動速度の目安値、を設定することとなる。
And the
こうして、第1アクチュエータ18の作動による脚受部15bの移動変位を示す変位検出手段15dの信号出力について、制御部40で、脚受部15bの座部12に対する位置関係の把握に用いる他、脚受部15bの変位とこの変位の検出間隔を用いて脚受部15bの移動速度を求めることで、ストレッチ施療において、実際に施療強度が高い場合など、第1アクチュエータ18の負荷が高くなり脚受部15bの移動速度、すなわち、第1アクチュエータ18の作動速度が低下した状態を検知できることとなる。こうした速度に基づいて、例えば第2アクチュエータ19の制御を行うようにすれば、設定した施療強度が実際に得られる状態を目安として第2アクチュエータ19を作動させられ、傾動角度など変位そのものに基づいて制御を行う場合のように、個人ごとの脚の長さの差に伴う限界傾動角度の違いによる施療強度のばらつき等を生じさせない。
Thus, the signal output of the
この他、制御部40は、公知のマッサージ機と同様に、マッサージに先立つ被施療者の身体各部位置検出として、メカユニット50を制御し、メカユニット50を背もたれ部13における初期位置からガイドレール20に沿って移動させ、揉み玉51を被施療者に沿って動かす過程で、背もたれ部13にもたれた被施療者側からの揉み玉51に対する圧力の変化や揉み玉51の傾き変化等を順次取得し、この情報に基づいて、被施療者の肩位置、背骨のライン、腰位置を検出することもできる。
In addition to this, the
次に、本実施形態に係るマッサージ機における被施療者の脚裏部ストレッチ施療過程について説明する(図7参照)。前提として、マッサージ機1に被施療者が着座して背中を背もたれ部13にもたれさせた状態で、マッサージ機1の主電源が入とされ、マッサージ機1が起動して、被施療者の体重や体形検出などのマッサージ開始前の準備動作や、背もたれ部13のリクライニング角度調整等が完了し、さらに、被施療者によりマッサージコース等の動作状態指示が入力されて、種々のマッサージ動作を実行する中で、制御部40が脚に対するストレッチ施療を実行しようとしているものとする。
Next, the leg back stretch treatment process of the user in the massage machine according to the present embodiment will be described (see FIG. 7). As a premise, the massage machine 1 is turned on when the user is seated on the massage machine 1 and the back is leaned against the
そして、制御部40は、ストレッチ施療に係る各部の作動制御開始前に、脚支持部15がその初期位置としての最も下部に下がった状態にない場合は、第2アクチュエータ19を縮方向に作動させ、脚支持部15を初期位置まで傾動させる。合わせて、脚支持部の脚受部15bが最も座部寄りの位置となっていない場合には、第1アクチュエータ18を動作させて脚受部15bを座部12に近づく向きに移動させておく。
Then, the
制御部40は、ストレッチ施療における初期位置にある脚支持部15の、各機構部分の作動を開始させるにあたり、まず、あらかじめ設定されたストレッチの複数段階の施療強度、例えば、強、中、弱の三段階の施療強度のうち、被施療者が施療前に入力指示したか、マッサージコースの一部として選択設定されている施療強度を読出し、この施療強度にあらかじめ対応付けられて記録されている脚受部15bの移動速度の値を、制御の目安値として登録する(ステップS001)。
When starting the operation of each mechanism portion of the
この後、制御部40は、脚支持部15で脚の両側に位置する各脚用エアセルへの給気を実行してエアセルを膨張させる(ステップS002)(図5(B)、図8参照)。この脚用エアセルの膨張に伴い、脚のふくらはぎ部分がエアセルで両側から挟持され、脚受部15bに拘束されることとなる。
Thereafter, the
脚用エアセルが十分に膨張して、ふくらはぎ部分が挟持、拘束された状態で、制御部40は最下部の初期位置にある脚支持部15に対し、第2アクチュエータ19を伸長させ、第2アクチュエータ19一端部で脚支持部15の裏面側を押して脚支持部15を上向きに傾動させる(ステップS003)。
In a state where the leg air cell is sufficiently expanded and the calf portion is sandwiched and restrained, the
なお、座部12の両側に脚の大腿部を挟持する別のエアセルを配設している場合、制御部40は、この第2アクチュエータ19による脚支持部15の傾動開始前後、あるいは傾動開始と同時に、大腿部の挟持用エアセル79への給気を行い、これを膨張させ、大腿部の挟持を実行する(図8参照)。
In addition, when another air cell is provided on both sides of the
第2アクチュエータ19による脚支持部15の傾動を開始させ、脚支持部15の端部が床からある程度離れた後、制御部40は脚支持部15の第1アクチュエータ18を作動させ、脚支持部15の脚受部15bを基礎部15aに対し座部12から離れる側となる脚先端側へ少しずつ移動させていく(ステップS004)(図6(A)参照)。
After the tilting of the
こうして、仮に脚受部15bが基礎部15aに対し動かない場合、脚支持部15の傾動に伴って脚支持部15前面部分と座部12上面との距離が縮まり、座部12及び脚支持部15上の脚の長さと対応しない状態となって、脚支持部15に拘束された関係で長手方向に動けない脚で、その膝部分が、余長を調整するように座部12先端部及び脚支持部15上端部から離れて脚裏の伸張が阻害される状態となったり、膝に負担(無理な力)が加わる状態となる問題点を、脚受部15bを脚先端側へ移動させることで解消でき、脚を座部12や脚支持部15に付けて脚裏の伸張が適切に生じる状態のままで、脚支持部15の上向きの傾動を継続できる状態が得られる(図6参照)。
Thus, if the
この脚受部15bの脚先端側への移動は、脚支持部15の傾動状態に対応して、被施療者の足や脚支持部15の端部が床面に当接しない程度に移動量を調整しつつ実行される。
The movement of the
一方、制御部40は、脚受部15bの移動開始と共に、変位検出手段15dの出力を受取り、脚受部15bの移動変位を把握すると共に、変位検出手段15dから得られる、脚受部15bの変位とこの変位の検出間隔とから、脚受部15bの移動速度を継続的に算出し、第2アクチュエータ19の作動制御の目安の情報として取得する(ステップS005)。
On the other hand, the
制御部40の制御に基づき、第2アクチュエータ19を伸長させて、脚支持部15を上向きに傾動させ、被施療者の脚における膝より下の部分を持上げていく状態では、脚用エアセルで脚のふくらはぎ部分を拘束すると共に、脚受部15bを脚先端側に移動させて脚が座部と脚支持部上に接した状態を維持していることで、脚が適切な姿勢をとりつつ前方へ引張られる形となって、脚にストレッチ運動のような負荷が加わる状態となり、脚裏、特に大腿部裏側から膝裏にかけての部位が伸される状態となる。
Under the control of the
この脚支持部15の傾動の際には、必要に応じて背もたれ部13を起こす動作を連動させることもでき、背もたれ部13が起きて被施療者が上体を起こした姿勢を強いられることで、脚裏が伸びる向きの負荷がさらに加わる状態となり、脚裏へのストレッチ効果がさらに向上する。
When the
この後、脚支持部15の傾動の進行で、脚支持部15の前面側が座部12の高さに達し、脚支持部15の傾動角度が被施療者の脚の可動範囲の限界に近づく(図6(B)参照)と共に、被施療者の脚の膝から下部分が座部12に対し移動しにくくなり、脚受部15bの座部12から離れる向きの移動において抵抗が加わる状態となる。これに伴い、脚受部15bを移動させる第1アクチュエータ18の負荷が急増し、脚受部15bの移動速度及びこれに係る第1アクチュエータ18の作動速度も大幅に低下する。
Thereafter, as the tilting of the
制御部40は、脚受部15bの移動開始から、脚受部15bの移動速度を継続的に取得しており、この低下状態にある速度が、先に設定された目安値に達したか否かを判定する(ステップS006)。
The
ストレッチの施療強度が強くなるほど、第1アクチュエータ18の負荷も大となるなど、ストレッチ施療における施療強度と第1アクチュエータ18の負荷とは対応しており、また、第1アクチュエータ18の負荷上昇と脚受部15bの移動速度の低下度合も一定の関係性を有することがわかっていることから、制御部40では、あらかじめ設定されたストレッチの施療強度に対応する脚受部15bの移動速度を制御の目安値とし、第1アクチュエータ18を作動させる間、取得した脚受部15bの移動速度をこの目安値と比較照合する。
The higher the stretch treatment strength is, the greater the load on the
制御部40は、取得した脚受部15bの移動速度が目安値に達したと判定すると、第2アクチュエータ19と脚用エアセルの給排制御機構に対し作動停止の制御指令を送出する。この後、第2アクチュエータ19は停止状態となり、脚支持部15の傾動が停止する(ステップS007)。これにより、あらかじめ選択、設定されたストレッチの施療強度を超えることなく脚支持部15の傾動が停止され、過剰なストレッチ施療が行われることはない。一方、前記ステップS006で速度が目安値に達していない場合には、前記ステップS003に戻って第2アクチュエータ19による脚支持部15の傾動を続行し、以降の過程を繰返す。
こうして脚受部15bの移動速度から施療強度を判断し、脚支持部15の傾動に係る第2アクチュエータ19の作動を制御しているので、脚の長さの個人差による傾動角度とストレッチの強度との関係の変化に影響を受けることなく、適切な施療強度でのストレッチが可能となる。
When the
In this way, the treatment intensity is judged from the moving speed of the
制御部40は、第2アクチュエータ19を停止させると共に、脚用エアセルを空気の排出により収縮させて脚を挟持状態から解放し(ステップS008)、また、別のエアセル79で大腿部を挟持している場合は、これについても空気排出により挟持状態から解放すると、脚が自由に動かせる状態に戻る。
この後、脚受部15bは、基礎部15aとの関係で座部12から離れる向きの移動限界に達し、これに応じて制御部40は第1アクチュエータ18を作動停止状態として(ステップS009)、一連のストレッチ施療が終了となる。(図9も参照) この実施形態では脚受部15bは、基礎部15aとの関係で座部12から離れる向きの移動限界に達するまで移動させているが、この脚受部15bも上記作動停止の制御指令に応じて停止位置を決定させてもよい。(図11参照)
The
Thereafter, the
また、この実施形態(図9)では脚支持部の傾動が停止し脚用エアセルの空気の排出が開始した後も、脚受部は引き続き移動を続けるのでストレッチ施療後に脚に対し弱い挟持状態でのさすり施療を行えている。 Further, in this embodiment (FIG. 9), even after the tilting of the leg support portion is stopped and the discharge of the air from the leg air cell is started, the leg receiving portion continues to move, so that the leg is weakly held against the leg after the stretch treatment. We are able to carry out the treatment.
もちろん、上記脚用エアセルの空気は、移動速度が目安値に達したことで排出を開始させる必要はなく、脚の挟持状態を維持させておいても良い。その場合、脚受部の移動速度は目安値に達した後も引き続き低下をつづける。そして場合によっては脚に強い引張力を与えるおそれがあるので、移動限界前に停止するように停止位置を決定することが望ましい。(図10参照) Of course, the air in the leg air cell does not need to start discharging when the moving speed reaches the reference value, and the leg may be held in a clamped state. In that case, the movement speed of the leg support portion continues to decrease after reaching the reference value. In some cases, a strong tensile force may be applied to the leg. Therefore, it is desirable to determine the stop position so as to stop before the movement limit. (See Figure 10)
これ以降は、他のマッサージ等に移行し、制御部40は、脚支持部15の位置が次の施療に適さない場合、第2アクチュエータ19を縮方向に作動させて、脚支持部15を下向きに傾動させると共に、第1アクチュエータ18を動作させて脚受部15bを座部12に近づく向きに移動させるなど、脚支持部15を施療に適した位置となるよう調整することとなる。
Thereafter, the
なお、ストレッチの施療に係る各機構部分の作動のタイミングについては、上記のように、エアセルの膨張開始後、第2アクチュエータ19による脚支持部15の傾動を開始し、その後に第1アクチュエータ18を用いた脚受部15bの移動を開始するようにしている(図9ないし図11参照)が、これに限られるものではなく、脚支持部15の傾動開始位置で脚受部15bが移動しても、脚受部15や被施療者の足が床に付くおそれがない場合には、脚支持部15の傾動と脚受部15bの移動を同時に開始するようにすることもできる。
In addition, as for the operation timing of each mechanism part related to the stretch treatment, as described above, after the air cell starts to expand, the
また、大腿部を挟持する別のエアセル79を用いる際の、その膨張開始のタイミングは、図12ないし図14の各タイミング例に示すように、制御部40が脚支持部15の傾動開始後に脚受部15bの移動を開始させる場合と、脚支持部15の傾動と脚受部15bの移動を同時に開始する場合のいずれでも、第2アクチュエータ19による脚支持部15の傾動開始と同時、あるいは傾動開始の前又は後、のいずれの時点でもかまわない。
In addition, when another
このように、本実施形態に係るマッサージ機は、座部12の前側で傾動可能に脚を支持する脚支持部15を、座部12に取付けられる基礎部15aとこれに対し移動可能な脚受部15bとの組合せ構造とし、脚へのストレッチの施療として脚支持部15を上向きに傾動させる際に、あらかじめ脚部エアセルで脚を挟持して脚受部15b上に保持固定した状態とし、さらに傾動の進行に合わせて、脚受部15bを座部12から離れる向きに少しずつ移動させることから、脚を脚支持部15や座部12から浮かせることなく脚支持部15を上向きに傾動させて脚を伸して、膝に負担をかけることなく、効率よく脚裏部分の筋肉のストレッチを行う状態が得られることとなり、脚のストレッチに係る施療をスムーズ且つ適切に実行でき、被施療者に対し優れた施療効果を付与できる。
As described above, the massage machine according to the present embodiment includes the
また、ストレッチ施療における施療強度と脚受部15bを移動させる第1アクチュエータ18の負荷とが対応し、且つ、脚受部15bの移動速度が第1アクチュエータ18の負荷の変化に応じて変わることを利用して、制御部40で、この速度の変化と施療強度とを対応付け、あらかじめ設定されたストレッチの施療強度に一対一に対応する脚受部15bの移動速度の値を、制御の目安値として設定し、第1アクチュエータ18を作動させる間、制御部40で取得した速度を目安値と比較照合しつつ、取得した速度が目安値に達すると、第2アクチュエータ19等に制御指令を送出するようにしている。これにより、第1アクチュエータ18の負荷変化に応じた速度の変化から、制御部40が施療強度を把握して、制御対象である第2アクチュエータ19を適切に制御でき、設定された施療強度に適合するように第2アクチュエータ19を作動させて脚支持部15を傾動させられ、適切な施療強度でストレッチを実行でき、結果として、脚の長さの個人差に伴う、脚支持部の傾動角度とストレッチの強度との関係が被施療者ごとに変化する状況に、第2アクチュエータ19の作動制御が影響を受けることはなく、被施療者が代っても常に適切な施療強度でのストレッチが可能となる。
In addition, the treatment intensity in the stretch treatment corresponds to the load of the
なお、前記実施形態に係るマッサージ機においては、脚受部15bの移動状態の把握にあたり、脚受部15bの位置変化をリニアエンコーダ等の変位検出手段15dで取得するようにし、制御部40が変位検出手段の出力から得られる、変位とこの変位の検出間隔とからの速度算出により取得した、脚受部15bの移動速度を、ストレッチの施療強度と対応付けて第2アクチュエータ19の作動制御に用いる構成としているが、この他、第1アクチュエータが可動部分を固定部分に対し直線的に移動させて伸縮するタイプとされると共に、変位検出手段としてのリニアエンコーダ等が一体に配設されるものとされ、制御部が第1アクチュエータの変位検出手段の出力より得られる、変位とこの変位の検出間隔とからの速度算出により取得した、第1アクチュエータの作動速度、詳細にはアクチュエータの伸長する速度を、ストレッチの施療強度と対応付けて、前記同様に第2アクチュエータの作動制御に用いる構成とすることもできる。すなわち、アクチュエータの作動の結果としてあらわれる速度であれば、アクチュエータに対し被動側である脚受部について取得した速度に限らず、アクチュエータの変化を直接検出して取得した速度でもかまわない。
In the massage machine according to the above-described embodiment, when the movement state of the
また、前記実施形態に係るマッサージ機においては、制御部40が脚受部15bの移動速度を、ストレッチの施療強度と対応付けて第2アクチュエータ19の作動制御に用いる構成としているが、この他、第2アクチュエータの作動速度を、ストレッチの施療強度と対応付けてそのまま第2アクチュエータの作動制御に用いる構成とすることもできる。この場合、制御部は、第2アクチュエータの変位検出手段としてのリニアエンコーダの出力から取得した、第2アクチュエータの作動速度、詳細には伸縮するタイプのアクチュエータの伸長する速度を、ストレッチの施療強度と対応付けて第2アクチュエータの作動制御に用いることとなる。さらに、脚支持部の傾動状態の把握にあたり、脚支持部の傾斜角度変化をロータリーエンコーダ等の変位検出手段で取得するようにし、制御部が、こうした変位検出手段より得られる、変位とこの変位の検出間隔とからの速度算出により取得した、脚支持部の傾動の速度を、前記同様に第2アクチュエータの作動制御に用いる構成とすることもできる。
Further, in the massage machine according to the embodiment, the
また、こうしたアクチュエータの作動に係る物理量である速度を、制御部による他のアクチュエータ等の制御の目安に用いているが、この他、アクチュエータの負荷の変化に応じて変わるものであれば、速度以外の例えば電流など、アクチュエータの作動に係る他の物理量を制御の目安として用いるようにしてもよい。さらに、アクチュエータの動作速度を一定に保つようにアクチュエータのPWM制御を行うなど、制御部でアクチュエータのフィードバック制御を行うものの場合には、PWM値の増加量といった、フィードバック値の変化量あるいは変化割合を、物理量とすることもできる。こうした物理量として速度を用いない場合、速度が低下する影響をほとんど受けることなく、確実な施療の動作を維持しつつ、前記同様のアクチュエータ等施療機構の制御が行える。 The speed, which is a physical quantity related to the operation of the actuator, is used as a guideline for controlling other actuators by the control unit. However, other than the speed, the speed can be changed according to the change in the actuator load. Other physical quantities related to the operation of the actuator, such as current, may be used as a guide for control. Furthermore, in the case where the actuator performs feedback control of the actuator, such as performing PWM control of the actuator so as to keep the operation speed of the actuator constant, the change amount or change rate of the feedback value such as the increase amount of the PWM value is set. It can also be a physical quantity. When speed is not used as such a physical quantity, it is possible to control a treatment mechanism such as an actuator similar to the above while maintaining a reliable treatment operation with almost no influence of a decrease in speed.
このような場合、脚裏部へのストレッチ施療として、脚支持部を上向きに傾動させる中、制御対象としての各機構部分の作動状態を制御する制御部が、脚受部の座部から離れる向きへの移動における、ストレッチの施療強度に応じてアクチュエータに加わる負荷の変化と、このアクチュエータの作動に係る所定の物理量の変化との対応関係をあらかじめ把握して、所定の目安とする施療強度に対応する前記物理量の目安値を設定し、アクチュエータの作動の間、前記物理量を取得して、物理量が前記目安値に達した際に所定の制御対象への制御指令を送出する制御を実行する、といえる。 In such a case, while stretching the leg support part upward as a stretch treatment to the leg back part, the control part that controls the operating state of each mechanism part as the control target is away from the seat part of the leg receiving part. In response to the treatment intensity of the stretch, the correspondence between the change in the load applied to the actuator according to the treatment intensity of the stretch and the change in the predetermined physical quantity related to the operation of this actuator is grasped in advance, and the treatment intensity as a predetermined standard is supported Setting a reference value of the physical quantity to be performed, acquiring the physical quantity during operation of the actuator, and executing control to send a control command to a predetermined control target when the physical quantity reaches the reference value; I can say that.
こうした制御部による制御の対象は、例示した脚支持部を押圧するアクチュエータやエアセルの給排気制御機構に限られるものではなく、アクチュエータに代えて、減速機構等を介して脚支持部を傾動させるモータなど他の駆動手段を用いる場合には、前記同様にこうした駆動手段を制御対象とすることができる。制御部は、脚支持部の上向きの傾動における、ストレッチの施療強度に応じて駆動手段に加わる負荷の変化と、駆動手段の作動に係る所定の物理量の変化との対応関係をあらかじめ把握して、目安とする施療強度に対応する前記物理量の目安値を設定し、駆動手段の作動の間、前記物理量を取得して、物理量が前記目安値に達した際に駆動手段への制御指令を送出する制御を行うこととなる。 The target of control by such a control unit is not limited to the actuator that presses the illustrated leg support unit or the air cell supply / exhaust control mechanism, but a motor that tilts the leg support unit via a speed reduction mechanism or the like instead of the actuator. In the case of using other driving means such as the above, such a driving means can be set as a control object as described above. The control unit grasps in advance the correspondence relationship between the change in the load applied to the drive unit according to the stretch treatment strength and the change in the predetermined physical quantity related to the operation of the drive unit in the upward tilt of the leg support unit, Set a reference value of the physical quantity corresponding to the reference treatment intensity, acquire the physical quantity during operation of the drive means, and send a control command to the drive means when the physical quantity reaches the reference value Control will be performed.
また、前記実施形態に係るマッサージ機においては、第2アクチュエータ19で脚支持部15を上向きに傾動させ、脚裏部分のストレッチ施療を行う構成としているが、これに加えて、脚支持部15の傾動時の脚裏部分の伸びを促すために、図15に示すように、座部12の前側上部位置で、被施療者の大腿部下部を持ち上げることのできるエアセルを設けるようにしてもよい。この場合、エアセルは、膨張して座部12前部を隆起させ、座部12の表面を大腿部下部の裏側に当接させ、大腿部をやや持ち上げた状態で保持する。これにより、脚を伸したままでその膝部が上側に移動して、脚裏をより伸張させるように作用することとなる。こうした座部12前部の隆起状態は、アクチュエータ等で座部12前部を下から押して持上げるなど、機械的に形成するようにしてもよい。
Further, in the massage machine according to the embodiment, the
この他、同様に脚裏部分の伸びを促すために、図16に示すように、脚支持部15の傾動中心となる座部12前端の軸部15cを上昇させる、位置調整手段81を設けることもできる。脚支持部15の上向きの傾動の際に、この位置調整手段81で脚支持部15の軸部15cを上昇させる場合、脚支持部15の傾動の中心位置が変わることで、脚の膝より下部分がより上側に移動させられる状態となり、座部12前部を隆起させる場合同様、脚裏をより伸張させるように作用することとなる。また、脚支持部15を大きく傾動させなくても、代りに軸部15cを上げることで脚支持部15の位置を上げられることから、脚裏のストレッチ効果を確保しつつ、脚支持部15の傾動範囲を小さく設定できる。この傾動中心の軸部15cを上昇させる位置調整手段は、前記座部12前部を隆起させる座部調整手段のエアセル等が兼ねるようにしてもかまわない。
In addition, as shown in FIG. 16, in order to promote the extension of the leg back portion in the same manner, there is provided a position adjusting means 81 for raising the
(本発明の第2の実施形態)
前記第1の実施形態に係るマッサージ機においては、制御部40が、脚裏部へのストレッチ施療における複数段階の施療強度のうち使用者に選択された施療強度に対応する脚受部15bの移動速度を目安値として、この目安値に随時取得している速度が達した際に、制御指令を送出して第2アクチュエータ19の作動停止等、これまでの作動状態からの変化を起させる制御を行う構成としているが、この他、第2の実施形態として、図17に示すように、制御部40が、制御における目安値を、使用者の選択可能な複数段階の施療強度とは別の、これらの施療強度に近いがより小さい、所定の目安の施療強度に対応した物理量(移動速度)とする一方、複数段階の施療強度の中から使用者に選択されたものを目標施療強度とし、第1アクチュエータ18の作動速度や脚受部15bの移動速度などの物理量が目安値に達したら、第2アクチュエータ19等の制御対象が前記目標施療強度を実現するように作動する制御指令を送出する、例えば、制御部40が第2アクチュエータ19に対し、前記速度が目安値に達した後、第2アクチュエータ19は実際の施療強度が目標施療強度に達すると予想される所定のタイミングで傾動停止する、との制御指令を送出する、といった制御を実行する構成とすることもできる。
(Second embodiment of the present invention)
In the massage machine according to the first embodiment, the
つまり、第1の実施形態では移動速度の目安値は選択される施療強度に応じてそれぞれ設定されるが、この実施形態では、移動速度の目安値は1つであり、目安値に達した時点で選択された目標施療強度に見合う停止位置を決定している。 That is, in the first embodiment, the reference value of the movement speed is set according to the selected treatment intensity, but in this embodiment, the reference value of the movement speed is one, and when the reference value is reached The stop position corresponding to the target treatment intensity selected in is determined.
この場合、制御部40は、使用者による施療強度の選択に関わりなく、ストレッチ施療の制御における目安値を常に一定とすることができ、目安値に達した状況から、選択された施療強度が実際に生じ得るまでの、各機構の残りの作動量が既知である場合は、制御を簡略化でき、また、目安値に達した時点の各部の状態(例えば、脚受部の移動量)を参照して、これらを考慮した制御を行うようにすることもでき、制御面で都合がよい。
In this case, the
この第2の実施形態に係るマッサージ機における被施療者の脚裏部ストレッチ施療過程について、図18のフローチャートを用いて説明する。前提として、前記第1の実施形態と同様に、マッサージ機1に被施療者が着座して背中を背もたれ部13にもたれさせた状態で、制御部40が脚に対するストレッチ施療を実行しようとしているものとする。
The process of stretching the leg back portion of the user in the massage machine according to the second embodiment will be described with reference to the flowchart of FIG. As a premise, as in the first embodiment, the
制御部40は、ストレッチ施療における初期位置にある脚支持部15の、各機構部分の作動を開始させるにあたり、まず、あらかじめ設定されたストレッチの複数段階の施療強度、例えば、強、中、弱の三段階の施療強度のうち、被施療者が施療前に入力指示したか、マッサージコースの一部として選択設定されている施療強度を読出し、この施療強度を目標施療強度として登録する(ステップS101)。
When starting the operation of each mechanism portion of the
この後、制御部40は、脚支持部15で脚の両側に位置する各脚用エアセルへの給気を実行してエアセルを膨張させる(ステップS102)。この脚用エアセルの膨張に伴い、脚のふくらはぎ部分がエアセルで両側から挟持され、脚受部15bに拘束される。
Thereafter, the
脚が挟持、拘束された状態で、制御部40は最下部の初期位置にある脚支持部15に対し、第2アクチュエータ19を伸長させ、脚支持部15を上向きに傾動させる(ステップS103)。
In a state where the legs are sandwiched and restrained, the
なお、座部12の両側に脚の大腿部を挟持する別のエアセルを配設している場合、制御部40は、この第2アクチュエータ19による脚支持部15の傾動開始前後、あるいは傾動開始と同時に、大腿部の挟持用エアセル79への給気を行い、これを膨張させ、大腿部の挟持を実行する。
In addition, when another air cell is provided on both sides of the
第2アクチュエータ19による脚支持部15の傾動を開始させ、脚支持部15の端部が床からある程度離れた後、制御部40は第1アクチュエータ18を作動させ、脚支持部15の脚受部15bを基礎部15aに対し座部12から離れる向きへ少しずつ移動させていく(ステップS104)。
After the tilting of the
一方、制御部40は、脚受部15bの移動開始と共に、変位検出手段15dの出力を受取り、脚受部15bの移動変位を把握すると共に、変位検出手段15dから得られる脚受部15bの変位とこの変位の検出間隔とから、脚受部15bの移動速度を継続的に算出し、第2アクチュエータ19の作動制御のための情報として取得する(ステップS105)。
On the other hand, the
制御部40の制御に基づき、第2アクチュエータ19を伸長させて、脚支持部15を上向きに傾動させ、被施療者の脚における膝より下の部分を持上げると共に、脚受部15bを脚先端側に移動させることで、脚にはストレッチ運動のような負荷が加わる状態となり、脚裏が伸される状態となる。
Based on the control of the
この後、脚受部15bの移動量が被施療者の脚の可動範囲の限界に近づき、被施療者の脚の膝から下部分が移動しにくくなり、脚受部15bの座部12から離れる向きの移動において抵抗が加わる状態となる。これに伴い、脚受部15bを傾動させる第1アクチュエータ18の負荷が急増し、脚受部15bの移動速度及びこれに係る第1アクチュエータ18の作動速度も大幅に低下する。
Thereafter, the amount of movement of the
制御部40は、あらかじめ設定されたストレッチの基準となる施療強度に対応する脚受部15bの移動速度を制御の目安値とすると共に、脚受部15bの移動開始から、脚受部15bの移動速度を継続的に取得し、取得した脚受部15bの移動速度をこの目安値と比較照合しており、低下状態にある脚受部15bの移動速度が、あらかじめ設定された目安値に達したか否かを判定する(ステップS106)。
The
制御部40は、取得した脚受部15bの移動速度が目安値に達したと判定すると、第2アクチュエータ19と脚用エアセルの給排制御機構に対し、登録された目標施療強度を生じさせるようにこれらが作動する制御指令を送出する。
When the
この制御指令を受けて、第2アクチュエータ19は、前記速度が目安値に達した後の適切なタイミングで作動停止状態となり、脚支持部15の傾動が停止する(ステップS107)。これにより、あらかじめ選択、設定されたストレッチの施療強度を生じさせるような脚支持部15の傾動状態が得られる。一方、前記ステップS106で速度が目安値に達していない場合には、前記ステップS103に戻って第2アクチュエータ19による脚支持部15の傾動を続行し、以降の過程を繰返す。
In response to this control command, the
制御部40は、第2アクチュエータ19を停止させると共に、第1アクチュエータ18の作動も停止させ、脚受部15bの移動を止める(ステップS108)。この後、制御部40は、脚用エアセルを空気の排出により収縮させて脚を挟持状態から解放し(ステップS109)、また、別のエアセル79で大腿部を挟持している場合は、これについても空気排出により挟持状態から解放すると、脚が自由に動かせる状態に戻り、一連のストレッチ施療が終了となる。
The
(本発明の第3の実施形態)
また、前記第1の実施形態に係るマッサージ機において、制御部40は、脚裏部へのストレッチ施療における脚受部15bの移動速度を目安値として、この目安値に随時取得している速度が達した際に、制御対象としての第2アクチュエータ19等に制御指令を送出する制御を行う構成としているが、この他、第3の実施形態として、制御部40が、取得している第1アクチュエータ18の作動速度や脚受部15bの移動速度などの物理量が目安値に達したら、ここまでの第1アクチュエータの作動により所定の変化が生じている第1アクチュエータ及び/又は脚受部15bの状態を把握し、この状態に応じた制御指令を、第2アクチュエータ19等の制御対象へ送出する制御を実行する構成とすることもできる。
(Third embodiment of the present invention)
In the massage machine according to the first embodiment, the
この場合、制御部40は、第1アクチュエータの作動に伴い変化した第1アクチュエータ及び/又は脚受部の状態、例えば、図19に示すように、脚受部15bの移動速度が目安値に達した時点の脚受部15bの移動量に基づいて第2アクチュエータ19を作動させる制御指令を第2アクチュエータ19に送出することとなり、制御対象としての第2アクチュエータ19を適切に作動させて脚支持部15を被施療者に合わせて傾動させられる。すなわち、脚受部15bの移動量は、被施療者の脚が長いほど大きくなるなど、脚の長さに対応する大きさとなることから、被施療者の脚長、すなわち体格を示す情報として用いることができ、脚受部15bの移動量に合わせて第2アクチュエータ19(望ましくは第1アクチュエータ18も含め)の作動を制御することで、同じ強さ段階の施療強度を生じさせるものながら、被施療者の体格に応じて異なる最適傾動量を与えられるなど、各機構を適切に連係させて無理のないスムーズなストレッチ施療を実行できる。
In this case, the
つまり、この実施形態では移動速度の目安値に達するとその時点での移動量(進退位置)に基づいて目標施療強度に見合う傾動停止位置(望ましくは移動停止位置も合わせて)を決定している。なお、図19では施療強度「強」における体格「大」及び「小」を例示しているが施療強度「中」「弱」においても体格毎に停止位置が決定されることは言うまでもない。 That is, in this embodiment, when the reference value of the movement speed is reached, the tilt stop position (preferably also including the movement stop position) corresponding to the target treatment intensity is determined based on the movement amount (advance / retreat position) at that time. . In FIG. 19, the physiques “large” and “small” at the treatment intensity “strong” are illustrated, but it goes without saying that the stop position is determined for each physique even at the treatment intensity “medium” and “weak”.
以上の説明した第1の実施形態ないし第3の実施形態のそれぞれは、上記脚曲げ施療と脚伸ばし施療を組み合わせた脚のストレッチ施療をもとに、第1アクチュエータの速度(脚受部の移動速度)が目安値に達した際に、第2のアクチュエータによる傾動の停止位置と脚用エアセルの作動停止タイミングを決定する実施例を説明したが、移動位置が目安値に達した場合に、傾動と移動の両方もしくはいずれか一方の停止位置を決定するようにしてもよい。 Each of the first to third embodiments described above is based on the leg stretching treatment combining the leg bending treatment and the leg stretching treatment, and the speed of the first actuator (the movement of the leg receiving portion). The example of determining the stop position of tilting by the second actuator and the operation stop timing of the leg air cell when the speed) reaches the guide value has been described. It is also possible to determine the stop position of either or both of the movement and the movement.
また、脚曲げ施療のみ、または脚伸ばし施療のみの実施形態にも本発明を適用出来ることは言うまでもない。 It goes without saying that the present invention can also be applied to an embodiment in which only leg bending treatment or leg extension treatment is performed.
まず、脚曲げ施療のみの場合は、強度指示される施療強度に応じて傾動の移動速度の目安値を予め設定しておき、強度指示及び/又は施療指示を受けて、脚を挟持した状態で脚支持部を傾動させるとともに、傾動の移動速度が目安値に達した際に、強度指示される施療強度に応じた傾動停止位置を決定することとする。 First, in the case of only leg bending treatment, a reference value of the moving speed of tilting is set in advance according to the treatment strength indicated by the strength, and the leg is clamped in response to the strength instruction and / or treatment instruction. The leg support unit is tilted, and when the moving speed of the tilt reaches a reference value, the tilt stop position corresponding to the treatment intensity indicated by the strength is determined.
そして、脚伸ばし施療のみの場合は、強度指示される施療強度に応じて移動速度の目安値を予め設定しておき、強度指示及び/又は施療指示を受けて、脚を挟持した状態で脚支持部を移動させるとともに、移動速度が目安値に達した際に、強度指示される施療強度に応じた移動停止位置を決定することとする。 In the case of only leg extension treatment, a reference value of the movement speed is set in advance according to the treatment intensity indicated by the strength, and the leg support is performed with the leg held in response to the strength instruction and / or treatment instruction. When the moving speed reaches the reference value, the movement stop position corresponding to the treatment intensity indicated by the intensity is determined.
(本発明の参考となる第4の実施形態)
本発明の参考となる第4の実施形態に係るマッサージ機を前記図20ないし図22に基づいて説明する。
(Fourth embodiment for reference of the present invention)
A massage machine according to a fourth embodiment which is a reference of the present invention will be described with reference to FIGS.
前記各図において本実施形態に係るマッサージ機は、前記第1の実施形態同様、各種の施療機構と共に脚のストレッチ施療を実行可能な制御構成を備える一方、異なる点として、揉み玉51による施療対象部位への揉み施療の際の施療強度調整において、制御部40が、目安とする揉みの施療強度に対応する、揉み施療に係る揉み玉51の作動速度の目安値を設定し、揉み玉51を動かす揉みモータ62の作動の間、揉み玉51の作動速度を取得しつつ、この速度が前記目安値に達した際に、制御対象としての進退モータ58に制御指令を送出し、強度調整に係る進退モータ58の作動状態を変化させる、前記第1の実施形態での脚のストレッチ施療における制御の場合と類似する制御を実行する構成を有するものである。
In each of the drawings, the massage machine according to the present embodiment has a control configuration capable of performing leg stretch treatment together with various treatment mechanisms, as in the first embodiment. In the treatment intensity adjustment at the time of massaging treatment for the part, the
なお、揉み玉51による揉み施療における強度調整に係る制御以外の点については、前記第1の実施形態の場合と同じであり、詳細な説明を省略する。
Note that points other than the control related to the intensity adjustment in the massage treatment by the
前記制御部40は、前記第1の実施形態同様の制御に加えて、特に、揉み施療の際の施療強度調整として、メカユニット50において揉み玉51と駆動機構部60をベース部54に対し傾動させて揉み玉51の被施療者側への突出量を変化させる進退モータ58の作動状態を制御するにあたり、背中の施療対象部位への揉み施療としての揉み玉51の揺動における、揉みの施療強度に応じて揉みモータ62に加わる負荷の変化と、揉みモータ62の作動に係る所定の物理量の変化との対応関係をあらかじめ把握して、目安とする施療強度に対応する前記物理量の目安値を設定し、揉みモータ62の作動の間、前記物理量を取得して、物理量が前記目安値に達したら、進退モータ58に対し所定の制御指令を送出するようにしている。
In addition to the control similar to that of the first embodiment, the
上記の揉みモータ62の作動に係る所定の物理量としては、駆動機構部60のハウジング61に内蔵された変位検出手段としてのエンコーダ65より得られる、揉み玉支持アーム52を駆動する駆動軸(図示を省略)の回転角度変位とこの変位の検出間隔とからの速度算出により取得した、揉み玉51の作動速度、より詳細には、揉み玉51が駆動機構部60に対し被施療者に近づく向きに移動する速度、を用いている。このように、速度は、揉みモータ62から直接検出した変化に基づくものではなく、揉みモータ62の作動の結果として揉みモータ62の被動側である揉み機構の駆動軸にあらわれるものを制御に用いることで、制御の精度を確保しつつ速度の取得を揉み玉位置把握用の簡略な検出機構で容易に行えるようにしている。
The predetermined physical quantity related to the operation of the kneading
そして、制御部40は、揉み施療における施療強度を、マッサージ機の使用者、具体的には被施療者、に選択可能としてあらかじめ複数段階、例えば、五段階に設定しており、こうした複数段階の強度の中から使用者に選択されたものを目安とする施療強度として、この目安の強度に対応する前記物理量の目安値、本実施形態では揉み玉51の作動速度の目安値、を設定することとなる。
And the
より具体的には、前記揉み玉51の作動速度は、揉みモータ62の作動で、揉み玉51が駆動機構部60に対し被施療者に近づく向きに移動する際に、揉み玉支持アーム52を駆動する駆動軸の回転角度変位が、エンコーダ65から出力されるパルス信号の数として得られると共に、このパルス数分の時間が角度変位の検出間隔に相当することで、パルス信号の数に応じた角度変位とこのパルス数に対応した時間とから算出できる仕組みである。
More specifically, the operation speed of the kneading
ただし、現実的な処理としては、制御部40で、単位角度変位、すなわち一つのパルス信号が生じた際に、その変位にかかった時間に相当する、前記パルス信号の幅を検出し(図20参照)、これが速度と一対一に対応していることから、このパルス信号幅の値を速度に代えてそのまま制御に用いて、制御処理を簡略化するのが好ましい。この場合、前記パルス信号幅も、揉みモータ62の作動に係る物理量といえ、制御部40は、複数段階、例えば、五段階に設定した揉み施療の施療強度に、速度に代るパルス信号幅の値をそれぞれ対応付けた上で(表1参照)、五段階の強度の中から使用者に選択されたものを目安とする施療強度とし、この目安の強度に対応するパルス信号幅の値を目安値に設定して、モータの作動制御を実行することとなる。
However, as a practical process, when the
前記五段階の施療強度とパルス信号幅の値との対応の例を下記表1に示す。表1には、表中の下段ほど大となる施療強度ごとに、対応するパルス信号幅、及び、対応する作動速度の変化量(無負荷時に対する割合)を示している。 Table 1 below shows an example of correspondence between the five levels of treatment intensity and the value of the pulse signal width. Table 1 shows the corresponding pulse signal width and the corresponding change amount of the operating speed (ratio with respect to no load) for each treatment intensity that becomes larger in the lower part of the table.

こうして、制御部40では、揉み機構の駆動軸の回転角度変位を示すエンコーダ65の信号出力について、揉み玉51の位置の把握に用いる他、回転角度変位とこの変位の検出間隔を用いて、揉み玉51の作動速度を求め、この速度を、駆動機構部60を傾動させて施療強度を調整する進退モータ58の制御の目安とする情報として用いている。これにより、揉み施療において施療強度を調整する際、設定強度に対応して実際に施療強度が高まった場合など、揉みモータ62の負荷が高くなり、揉み玉51の作動速度が低下した状態を、制御部40で検知できる。制御部40はこうした作動速度に基づいて進退モータ58の制御を行うことで、設定した施療強度が実際に得られる状態を目安としてモータの作動を制御でき、駆動機構部の傾動した角度など変位そのものに基づいて進退モータ58の制御を行う場合のように、個人ごとの体格の差に伴う限界傾動角度の違いによる実施療強度のばらつき等を生じさせないと共に、背もたれ部13上で被施療者が動いて、施療対象部位の背もたれ部13における位置が変化した場合にも、追随して適切な施療強度で施療が行える状態に調整設定できる。
In this way, the
次に、本実施形態に係るマッサージ機における被施療者への揉み施療での施療強度調整過程について説明する(図21参照)。前提として、前記第1の実施形態における脚裏部のストレッチ施療の場合と同様、マッサージ機90に被施療者が着座して背中を背もたれ部13にもたれさせた状態で、マッサージ機90が起動して施療可能な状態に移行した上で、被施療者によりマッサージコース等の動作状態指示が入力され、制御部40が被施療者の背中における施療対象部位に対する揉み施療を実行する中、マッサージ機のリモコン30に対し被施療者から揉みの施療強度のより強くする調整を入力指示されたものとする。
Next, the treatment intensity adjustment process in the massage treatment for the user in the massage machine according to the present embodiment will be described (see FIG. 21). As a premise, as in the case of the stretch treatment of the back of the leg in the first embodiment, the massage machine 90 is activated with the user seated on the massage machine 90 and the back leaning against the
制御部40は、被施療者の施療強度調整の入力指示を受けて、揉み施療における施療強度調整に係る進退モータ58の作動を開始させるにあたり、まず、あらかじめ設定された揉みの複数段階の施療強度のうち、被施療者が入力指示した施療強度に、あらかじめ対応付けられて記録されている揉み玉51の作動速度の値を、制御の目安値として登録する(ステップS201)。
When the
そして、制御部40は、メカユニット50の進退モータ58を作動させて揉み玉51と駆動機構部60を傾動させ(ステップS202)、揉みに係る作動中の揉み玉51を、背もたれ部13にもたれた被施療者の背面の施療対象部位にさらに押し付けるように被施療者側へ突出させる(図22参照)。
Then, the
一方、制御部40は、進退モータ58の作動開始と共に、揉み機構における変位検出手段としてのエンコーダ65の出力を受取り、駆動軸の回転角度変位及びこれより求められる揉み玉51の位置を把握する。加えて、制御部40は、エンコーダ65から得られる、駆動軸の回転角度変位とこの変位の検出間隔とから、揉み玉51の作動速度を継続的に算出し、進退モータ58の作動制御のための目安情報として取得する(ステップS203)。
On the other hand, the
揉み施療に係る揺動と共に、駆動機構部60ごとの傾動による揉み玉51の被施療者側への進行で、揉み玉51が被施療者の背部を押圧しながら揉み施療を行う状態が得られる。この時、進退モータ58の作動による揉み玉51の進行に伴い、揉み玉51は被施療者の施療対象部位の押圧強度を大きくしていく中で、揉み玉51の揉みに係る動きにおいて抵抗が増大する状態となる。これに伴い、揉みモータ62で駆動される揉み玉51の作動速度、すなわち、揉み玉51の被施療者側へ近づく向きに移動する速度が大幅に低下する。
As the kneading
制御部40は、進退モータ58の作動開始から、揉み玉51の揉みに係る作動速度を継続して取得しており、この低下状態にある速度が、先に登録された目安値に達したか否かを判定する(ステップS204)。
進退モータ58による傾動を伴って、揉みの施療強度が強くなるほど、揉みモータ62の負荷も大となるなど、揉み施療における強度調整時の施療強度と揉みモータ62の負荷とは対応しており、また、揉みモータ62の負荷上昇と揉みモータ62により駆動される揉み玉51の作動速度の低下度合も一定の関係性を有することがわかっていることから、制御部40では、あらかじめ設定された揉みの施療強度に対応する揉み玉51の作動速度をそれぞれ目安値とし、揉み施療として揉みモータ62を作動させ、揉み玉51を作動させる間、取得した作動速度をこの目安値と比較照合する。
The
The treatment strength at the time of strength adjustment in the massage treatment corresponds to the load of the
制御部40は、取得した揉み玉51の作動速度が低下して目安値に達したと判定すると、制御部40は進退モータ58に対し作動停止の制御指令を送出する。この後、進退モータ58は停止状態となり、揉み玉51と駆動機構部60のベース部54に対する傾動が停止する(ステップS205)。これにより、あらかじめ選択、設定された揉みの施療強度を超えないよう揉み玉51の突出が抑えられ、揉み玉51による揉み施療の強度が設定に対応したものとなる。
When the
一方、前記ステップS104で速度が目安値に達していない場合には、前記ステップS102に戻って進退モータ58による揉み玉51及び駆動機構部60の傾動を続行し、以降の過程を繰返す。
On the other hand, if the speed does not reach the reference value in step S104, the process returns to step S102 to continue the tilting of the kneading
揉みに係る揉み玉51の作動速度から施療強度を判断し、揉み玉51及び駆動機構部60の傾動に係る進退モータ58の作動を制御しているので、体形の個人差や被施療者の動きによる揉み玉の突出量と揉みの強度との関係の変化に影響を受けることなく、適切な施療強度での揉み施療が可能となる。
The treatment intensity is judged from the operation speed of the kneading
制御部40が進退モータ58を停止させると、一連の揉み施療における強度調整は終了となる。この後、制御部40は進退モータ58の停止状態を維持して、施療時間としてあらかじめ規定された所定時間、揉み施療状態を継続させる。その後、揉みの施療が終了し、他のマッサージ等に移行する場合には、制御部40は、揉み玉51及び駆動機構部60の位置が次の施療に適さない場合、進退モータ58を揉み玉51及び駆動機構部60が被施療者から離れる側に傾動させる回転方向に回転させると共に、メカユニット50を上又は下に移動させるなど、揉み玉51を施療に適した位置となるよう調整することとなる。
When the
以上のように、本実施形態に係るマッサージ機は、揉み施療の際の施療強度調整において、揉み施療としての揉み玉51の作動における、揉みの施療強度に応じて揉みモータ62に加わる負荷の変化と、揉み玉51の作動速度の変化との対応関係を制御部40があらかじめ把握して、目安とする施療強度に対応する揉み玉51の作動速度の目安値を設定し、揉みモータ62の作動の間、制御部40が揉み玉51の作動速度を取得して、この揉み玉51の作動速度が前記目安値に達した際に、進退モータ58に制御指令を送出する制御を実行するものである。
As described above, in the massage machine according to the present embodiment, in the treatment intensity adjustment during the massage treatment, the load applied to the
このように本実施形態に係るマッサージ機においては、揉み施療における施療強度と揉み玉51を動かす揉みモータ62の負荷とは対応しており、また、揉みモータ62の負荷の変化に応じて変わる、揉み玉51の作動速度など、揉みモータ62の作動に係る所定の物理量が存在することを利用して、制御部40で、この物理量の変化と施療強度とを対応付け、あらかじめ設定された揉みの施療強度に一対一に対応する、前記物理量の値を、目安値として設定し、揉みモータ62を作動させる間、制御部40で取得した物理量を目安値と比較照合して、取得した物理量が目安値に達したら、制御部40から進退モータ58に制御指令を送出するようにしている。これにより、揉みモータ62の負荷変化に応じた物理量の変化から施療強度を把握して、進退モータ58を適切に制御でき、設定された施療強度に適合するように進退モータ58を作動させて揉み玉51を移動させることができ、結果として、体格の個人差や被施療者の動きに伴う、揉み玉51及び駆動機構部60の傾動の角度と揉み施療の強度との関係が変化する状況に、進退モータ58の作動制御が影響を受けることはなく、背もたれ部13上の被施療者の状態が変っても、常に適切な施療強度に調整した上で揉み施療が可能となる。
Thus, in the massage machine according to the present embodiment, the treatment intensity in the massage treatment corresponds to the load of the
(本発明の参考となる第5の実施形態)
前記第4の実施形態に係るマッサージ機において、制御部40は、揉み施療の際の施療強度調整で、目安とする揉みの施療強度に対応する、揉み施療に係る揉み玉51の作動速度の目安値を設定し、揉みモータ62の作動の間、揉み玉51の作動速度を取得しつつ、この速度が前記目安値に達した際に、制御対象としての進退モータ58に制御指令を送出し、進退モータ58の作動状態をそれまでと変化させる構成としているが、この他、第5の実施形態として、制御部40が、揉みモータ62の作動に係る物理量に代えて、揉み玉51及び駆動機構部60を傾動させる進退モータ58の作動の間、進退モータ58の作動に係る物理量を取得し、これがあらかじめ設定された目安値に達したら、所定の制御指令を進退モータ58に送出し、進退モータ58の作動状態を変化させる構成とすることもできる。
(Fifth embodiment for reference of the present invention)
In the massage machine according to the fourth embodiment, the
なお、進退モータ58の作動に係る物理量としては、メカユニット50に設けた変位検出手段としてのエンコーダ55より得られる、駆動機構部60の傾動による角度変位とこの変位の検出間隔とからの速度算出により取得した、揉み玉51と駆動機構部60の作動速度、より詳細には、揉み玉51と駆動機構部60がベース部54に対し被施療者に近づく向きに傾動する速度、を用いる。
The physical quantity related to the operation of the advance /
この揉み玉51と駆動機構部60の作動速度は、進退モータ58の作動で、揉み玉51と駆動機構部60がベース部54に対し被施療者に近づく向きに傾動する際に、駆動機構部60の傾動による角度変位が、エンコーダ55から出力されるパルス信号の数として得られると共に、このパルス数分の時間が角度変位の検出間隔に相当することで、パルス信号の数に応じた角度変位とこのパルス数に対応した時間とから算出できる仕組みである。
The operating speed of the kneading
このように、速度は、進退モータ58から直接検出した変化に基づくものではなく、進退モータ58の作動の結果として進退モータ58の被動側である駆動機構部60にあらわれるものを制御に用いることで、制御の精度を確保しつつ速度の取得を簡略な機構で容易に行えるようにしている。
As described above, the speed is not based on the change directly detected from the advance /
続いて、この第5の実施形態に係るマッサージ機における被施療者への揉み施療での施療強度調整過程について、図23のフローチャートを用いて説明する。前提として、前記第4の実施形態の場合と同様に、マッサージ機90に被施療者が着座して背中を背もたれ部13にもたれさせた状態で、揉み施療を実行する中、被施療者から揉みの施療強度のより強くする調整を入力指示されたものとする。
Then, the treatment intensity | strength adjustment process in the massage treatment to the user in the massage machine which concerns on this 5th Embodiment is demonstrated using the flowchart of FIG. As a premise, as in the case of the fourth embodiment, while the user is seated on the massage machine 90 and the back is leaned against the
制御部40は、被施療者の施療強度調整の入力指示を受けて、揉み施療における施療強度調整に係る進退モータ58の作動を開始させるにあたり、まず、あらかじめ設定された揉みの複数段階の施療強度のうち、被施療者が入力指示した施療強度に、あらかじめ対応付けられて記録されている揉み玉51及び駆動機構部60の傾動に係る作動速度の値を、制御の目安値として登録する(ステップS301)。
When the
そして、制御部40は、メカユニット50の進退モータ58を作動させて揉み玉51と駆動機構部60を傾動させ(ステップS302)、揉みに係る作動中の揉み玉51を、背もたれ部13にもたれた被施療者の背面の施療対象部位にさらに押し付けるように被施療者側へ突出させる。
Then, the
一方、制御部40は、揉み玉51及び駆動機構部60の傾動開始と共に、変位検出手段としてのエンコーダ55の出力を受取り、駆動機構部60の傾動角度変位及びこれより求められる揉み玉51の突出量を把握する。加えて、制御部40は、エンコーダ55から得られる、駆動機構部60の傾動角度変位とこの変位の検出間隔とから、揉み玉51及び駆動機構部60の作動速度を継続的に算出し、進退モータ58の作動制御のための目安情報として取得する(ステップS303)。
On the other hand, the
揉み施療に係る揺動と共に、駆動機構部60ごとの傾動による揉み玉51の被施療者側への進行で、揉み玉51が被施療者の背部を押圧しながら揉み施療を行う状態が得られる。この時、進退モータ58の作動による揉み玉51の進行に伴い、揉み玉51は被施療者の施療対象部位の押圧強度を大きくしていく中で、揉み玉51及び駆動機構部60の傾動において抵抗が増大する状態となる。これに伴い、進退モータ58で駆動される揉み玉51及び駆動機構部60の作動速度、すなわち、揉み玉51及び駆動機構部60の被施療者側へ傾動する速度が大幅に低下する。
As the kneading
制御部40は、あらかじめ設定された施療強度に対応する揉み玉51及び駆動機構部60の作動速度を目安値とすると共に、揉み玉51及び駆動機構部60の傾動開始から、その速度を継続して取得し、取得した速度をこの目安値と比較照合しており、低下状態にある速度が、先に登録された目安値に達したか否かを判定する(ステップS304)。
The
制御部40は、取得した揉み玉51及び駆動機構部60の作動速度が低下して目安値に達したと判定すると、制御部40は選択された揉みの施療強度に対応してあらかじめ設定されている揉み玉51及び駆動機構部60の位置データを取得し(ステップS305)、この位置データに基づいて、揉み玉51及び駆動機構部60を被施療者から離す側へ所定角度分傾動させた後停止させるように、進退モータ58を作動させる制御指令を、進退モータ58に対し送出し、進退モータ58は揉み玉51及び駆動機構部60が被施療者から離れる側に前記所定角度分戻した後、停止状態となり、揉み玉51と駆動機構部60を停止させる(ステップS306)。これにより、揉みに際しての揉み玉51の突出量は適切なものとなり、揉み玉51による揉み施療の強度は使用者の選択した施療強度に正しく対応することとなる。
When the
一方、前記ステップS304で速度が目安値に達していない場合には、前記ステップS302に戻って進退モータ58による揉み玉51及び駆動機構部60の傾動を続行し、以降の過程を繰返す。
制御部40が進退モータ58を停止させると、一連の揉み施療における強度調整は終了となる。この後、前記第4の実施形態と同様、制御部40は施療時間としてあらかじめ規定された所定時間、揉み施療状態を継続させる。
On the other hand, if the speed does not reach the reference value in the step S304, the process returns to the step S302 to continue the tilting of the kneading
When the
なお、前記第1ないし第4の各実施形態に係るマッサージ機について、施療の具体例としてストレッチや揉みを挙げて、これらの施療の際に、制御部で施療強度とアクチュエータやモータ等の駆動手段の作動に係る所定の物理量とを対応付け、目安とする施療強度に対応する物理量の目安値を設定し、取得した物理量が前記目安値に達すると、制御部が他のアクチュエータ等の制御対象に制御指令を送出する制御を実行する点を説明しているが、こうした制御手法の適用は、ストレッチや揉みに限られず、いずれの施療についても一般化できる。すなわち、所定の施療時における駆動手段の作動状態を制御する制御部が、駆動手段で駆動される施療実行手段の作動状態における、施療強度に応じて駆動手段に加わる負荷の変化と、駆動手段の作動に係る所定の物理量の変化との対応関係をあらかじめ把握して、目安とする施療強度に対応する前記物理量の目安値を設定し、駆動手段の作動の間、前記物理量を取得して、物理量が前記目安値に達した場合に、所定の制御対象への制御指令を送出する制御を実行する、といったものとなる。 In addition, about the massage machine which concerns on the said 1st thru | or 4th embodiment, a stretch and an itch are mentioned as a specific example of treatment, and in these treatments, treatment intensity and drive means, such as an actuator and a motor, in a control part Is associated with a predetermined physical quantity related to the operation of the physical quantity, a standard value of the physical quantity corresponding to the standard treatment intensity is set, and when the acquired physical quantity reaches the standard value, the control unit becomes a control target such as another actuator. Although the point which performs control which sends out a control command is explained, application of such a control method is not restricted to stretch and itch, and can generalize about any treatment. That is, the control unit that controls the operating state of the driving unit at the time of predetermined treatment is a change in the load applied to the driving unit according to the treatment intensity in the operating state of the treatment executing unit driven by the driving unit, and the driving unit By grasping in advance the correspondence relationship with the change of the predetermined physical quantity related to the operation, setting the reference value of the physical quantity corresponding to the reference treatment intensity, acquiring the physical quantity during the operation of the driving means, and obtaining the physical quantity When the value reaches the reference value, control for sending a control command to a predetermined control target is executed.
1 マッサージ機
11 基台部
12 座部
13 背もたれ部
14 肘掛部
15 脚支持部
15a 基礎部
15b 脚受部
15c 軸部
15d 変位検出手段
16 スタンド
17 フレーム
18 第1アクチュエータ
19 第2アクチュエータ
20 ガイドレール
30 リモコン
40 制御部
50 メカユニット
51 揉み玉
52 揉み玉支持アーム
54 ベース部
55 エンコーダ
55a センサ部
55b スケール部
57 昇降モータ
58 進退モータ
58a 小歯車
60 駆動機構部
61 ハウジング
62 揉みモータ
64 叩きモータ
65 エンコーダ
67 歯部
70 エアポンプ
71 臀部用エアセル
72 太腿用エアセル
73 背中用エアセル
74 腰用エアセル
75、76 脚用エアセル
77、78 脚用エアセル
79 挟持用エアセル
80 エアセル
81 位置調整手段
DESCRIPTION OF SYMBOLS 1
Claims (1)
脚支持部の座部に対する傾斜角度を変化させる傾動手段と、
脚支持部の傾斜位置を検出する変位検出手段と、
脚支持部の傾動の移動速度を検出する速度検出手段と、
被施療者の脚を挟持した状態で、脚支持部を傾動させる脚曲げ施療の施療指示手段と、
脚曲げ施療における施療強度を複数段階入力可能な施療強度指示手段と、
を備え、
強度指示される施療強度に応じた傾動の移動速度の目安値を予め設定し、
上記強度指示及び/又は施療指示を受けて、脚を挟持した状態で脚支持部を傾動させるとともに、傾動の移動速度が目安値に達した際に、強度指示される施療強度に応じた傾動停止位置を決定することを特徴とするマッサージ機。 In a massage machine comprising a seat portion and a backrest portion, and a leg support portion disposed to support and support the leg on the front side of the seat portion,
Tilting means for changing the tilt angle of the leg support portion with respect to the seat portion;
A displacement detecting means for detecting the tilt position of the leg support;
Speed detecting means for detecting the moving speed of the tilting of the leg support,
Treatment instruction means for leg bending treatment for tilting the leg support portion while sandwiching the legs of the user;
Treatment strength instruction means capable of inputting treatment strength in multiple steps in leg bending treatment;
With
Set a guide value for the movement speed of the tilt according to the treatment intensity indicated by the intensity,
In response to the strength instruction and / or treatment instruction, the leg support portion is tilted while the leg is sandwiched, and when the movement speed of the tilt reaches the reference value, the tilt is stopped according to the treatment strength indicated by the strength. A massage machine characterized by determining a position.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012178190A JP6033606B2 (en) | 2012-08-10 | 2012-08-10 | Massage machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012178190A JP6033606B2 (en) | 2012-08-10 | 2012-08-10 | Massage machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014033917A JP2014033917A (en) | 2014-02-24 |
| JP6033606B2 true JP6033606B2 (en) | 2016-11-30 |
Family
ID=50283268
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012178190A Active JP6033606B2 (en) | 2012-08-10 | 2012-08-10 | Massage machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6033606B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6503191B2 (en) * | 2015-01-21 | 2019-04-17 | マクセルホールディングス株式会社 | Massage machine |
| JP2019208565A (en) * | 2018-05-31 | 2019-12-12 | 株式会社フジ医療器 | Massage machine |
| JP6731453B2 (en) * | 2018-08-23 | 2020-07-29 | マクセルホールディングス株式会社 | Massage machine |
| JP6865245B2 (en) * | 2019-04-09 | 2021-04-28 | 株式会社フジ医療器 | Chair type massage machine |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4236164B2 (en) * | 2003-05-21 | 2009-03-11 | 九州日立マクセル株式会社 | Massage machine |
| JP4848812B2 (en) * | 2006-03-28 | 2011-12-28 | パナソニック電工株式会社 | Massage machine |
| JP4732945B2 (en) * | 2006-04-14 | 2011-07-27 | 株式会社フジ医療器 | Chair massage machine |
| JP4755022B2 (en) * | 2006-05-26 | 2011-08-24 | 株式会社フジ医療器 | Chair massage machine |
| JP2007325658A (en) * | 2006-06-06 | 2007-12-20 | Family Co Ltd | Massage machine |
| JP5364623B2 (en) * | 2010-03-09 | 2013-12-11 | ファミリーイナダ株式会社 | Chair type massage machine |
-
2012
- 2012-08-10 JP JP2012178190A patent/JP6033606B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014033917A (en) | 2014-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5951338B2 (en) | Massage machine | |
| JP6222715B2 (en) | Massage machine | |
| JP6033606B2 (en) | Massage machine | |
| JP5815104B2 (en) | Massage machine | |
| JP4615922B2 (en) | Massage machine | |
| CN116942463A (en) | Chair type massage machine | |
| JP7282353B2 (en) | Massage machine | |
| CN110063879A (en) | Massager | |
| WO2016199461A1 (en) | Massage machine | |
| JP2014180509A (en) | Massage machine | |
| JP5936494B2 (en) | Massage machine | |
| JP6222716B2 (en) | Massage machine | |
| JP2010214155A (en) | Massage machine | |
| JP5873723B2 (en) | Massage machine | |
| JP6563573B2 (en) | Massage machine | |
| JP5086412B2 (en) | Massage machine | |
| JP6396559B2 (en) | Massage machine | |
| JP6248146B2 (en) | Massage machine | |
| JP2015104639A (en) | Massage club | |
| JP2022150848A (en) | Chair type massage machine | |
| JP6503191B2 (en) | Massage machine | |
| JP6027340B2 (en) | Massage machine | |
| JP6781310B2 (en) | Massage machine | |
| JP6731453B2 (en) | Massage machine | |
| WO2022224422A1 (en) | Massage machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150515 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160316 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160513 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161020 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161026 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6033606 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |