JP5991959B2 - Wheel equipment - Google Patents
Wheel equipment Download PDFInfo
- Publication number
- JP5991959B2 JP5991959B2 JP2013259184A JP2013259184A JP5991959B2 JP 5991959 B2 JP5991959 B2 JP 5991959B2 JP 2013259184 A JP2013259184 A JP 2013259184A JP 2013259184 A JP2013259184 A JP 2013259184A JP 5991959 B2 JP5991959 B2 JP 5991959B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- traveling
- swing arm
- auxiliary wheel
- swing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 81
- 230000002093 peripheral effect Effects 0.000 claims description 52
- 238000005096 rolling process Methods 0.000 claims description 22
- 230000001174 ascending effect Effects 0.000 claims description 7
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 28
- 238000000034 method Methods 0.000 description 11
- 230000008569 process Effects 0.000 description 11
- 230000009194 climbing Effects 0.000 description 10
- 230000010355 oscillation Effects 0.000 description 10
- 230000000694 effects Effects 0.000 description 7
- 210000000245 forearm Anatomy 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
Images



























Landscapes
- Handcart (AREA)
Description
本発明は、例えば、車輪付きキャリーケース、手荷物運搬用のキャリーカート、その他の車輪を介して移動可能な運搬用器具が対象物(「取付対象物」ともいう。)であって、この取付対象物に取り付けられて使用される、車輪装置に関するものである。 In the present invention, for example, a carry case with wheels, a carry cart for carrying baggage, and other transporting devices that can be moved via wheels are objects (also referred to as “attachment objects”), and this attachment object. The present invention relates to a wheel device used by being attached to an object.
本願出願人は、下記特許文献1にも記載されるとおり、段差を乗り越える機能を備えている車輪装置を提案しており、同文献の段落0117〜0118及び図10(特に図10(a),図10(b)を参照のこと。)には、車輪装置50に関し、段差20を越える場合、前側の小径補助輪4(A)が段差壁面22に当接したまま段差壁面22を上方に向かって転動し、大径補助輪3(B)が段差下段面21(平坦な走行路面21)に当接して段差壁面22に転動して接近し、揺動アーム55全体が走行形態のまま一体となって主車軸2aを中心として回転することにより、揺動アーム55の前側部分が上昇され、大径補助輪3(A)及び主車輪2が走行路面21から離反して浮き上がる、ことが記載されている。
The applicant of the present application has proposed a wheel device having a function of overcoming a step as described in
しかしながら、特許文献1に記載する車輪装置50では、段差20を越える場合、その前側の小径補助輪4(A)を段差壁面22に当接させて、キャリーカート10のバックフレーム12を前方斜め上方へ引っ張り上げると、揺動アーム55の前側の先端アーム55b(A)が連結軸55c(A)を中心に下向きに揺動してしまい、段差壁面22に当接した前側の小径補助輪4(A)が段差壁面22を下向きに転動し、前側の先端アーム55b(A)が車輪装置50と段差下段面21との間に折れ込んでしまうという不具合が稀に発生することが、後に判明した。
However, in the
もっとも、このように先端アーム55b(A)が下向きに折れ曲ったとしても、例えば、バックフレーム12を一旦引き上げて、車輪装置50を路面から空中へ持ち上げて揺動アーム55を非接地形態にした後(特許文献1の図7参照。)、これを路面に置き直すことで、先端アーム55b(A)の下向きの折れ曲りを解消することはできる。
However, even if the tip arm 55b (A) is bent downward in this way, for example, the
このようにして先端アーム55b(A)の折れ曲りが解消されれば、車輪装置50の揺動アーム55は走行形態に復帰するので、この後、段差20の乗り越えに再トライしたり、或いは、キャリーカート10を持ち上げて段差下段面21から段差上段面23に引き上げることもできるのではあるが、上記したような意図しない先端アーム55b(A)の折れ曲りは、結果として使用者に煩雑な作業を強いるため、積極的に解消されるべき問題点であると考えられる。
If the bending of the tip arm 55b (A) is eliminated in this way, the swing arm 55 of the
そこで、本発明は、上述した問題点を解消するためになされたものであり、操作部材を押したり引いたりして移動される取付対象物に対して使用される車輪装置について、段差越えを行う場合に段差壁面に当接した補助輪を上方にスムーズに転動上昇させることができる車輪装置を提供することを目的としている。 Therefore, the present invention has been made to solve the above-described problems, and a step over a step is performed for a wheel device used for an attachment object that is moved by pushing or pulling an operation member. It is an object of the present invention to provide a wheel device that can smoothly roll up an auxiliary wheel that is in contact with a stepped wall surface.
この目的を達成するために第1発明の車輪装置は、取付対象物に取り付けられ当該取付対象物を支持する取付台座と、その取付台座に固定され当該取付台座側から上方に延設され先端部が使用者により引っ張られ又は押される操作部材と、前記取付台座が前後方向へ相対的に揺動自在に連結軸を介して連結される車体フレームとその車体フレームに車軸を介して回動自在に軸支される前輪及び後輪とを有し、前記取付台座に作用する荷重を支持するとともに前記操作部材を介して作用する外力により前記前輪及び後輪が転動して走行する走行体と、その走行体の車体フレームに揺動軸を介して揺動自在に連結され、且つ、その揺動軸から前記走行体の前方へ向けて延出される揺動アームと、その揺動アームにおける延出部分の先端部に車軸を介して回動自在に軸支される補助輪と、前記走行体の前輪及び後輪が走行平面に接地した走行姿勢において、前記補助輪の外周前端が前記前輪の外周前端よりも前側にあり且つその補助輪の回転中心が前記揺動アームの揺動中心よりも前方上方となるとともに、その補助輪の回転中心及び前記揺動アームの揺動中心を結ぶ軸間直線が走行平面に対して前方上方に傾斜した格好となる位置(以下「待機位置」という。)にて、前記揺動アームを支持する支持機構と、その支持機構により前記待機位置で支持される前記揺動アームが、その待機位置とそれより上方にある上限位置との間で上昇揺動および下降揺動することを許容し、その揺動アームを前記上限位置で制止することにより当該上限位置を越える上昇揺動を禁止するストッパ手段とを備えており、前記補助輪は、前記走行姿勢において、前記走行体が前進することによって、段差壁面に当接され、その段差壁面を上昇転動するものであり、前記揺動アームは、前記走行姿勢において、前記補助輪が段差壁面を上昇転動することによって、前記待機位置から前記上限位置へ向かって上昇揺動するものであり、前記走行体は、前記車体フレームに連結された前記取付台座に作用する取付対象物の荷重を支持することで、その車体フレームとは別体の前記揺動アームに取付対象物の荷重が作用することで当該揺動アームの上昇揺動が妨害されることを防止するものであり、更に、前記操作部材を引っ張る力によって走行姿勢の前記走行体が段差壁面へ向かって走行平面上で前進移動され、この前進移動によって進行方向最前部に軸支される前記補助輪が段差壁面に衝突当接され、この衝突当接に伴う外力が前記揺動アームに対して作用することで前記補助輪が段差壁面を上方へ向けて転動して上昇移動され、この転動によって前記揺動アームが待機位置から上限位置へ向かって上昇揺動され上限位置に到達することで前記ストッパ手段によって制止され、この制止状態で前記操作部材が上方に更に引っ張られることによって、前記走行体が前記取付台座の連結軸を中心として回転され、前記走行体の前側部分が走行平面から離反して浮き上がって段差越え姿勢となるものである。 In order to achieve this object, the wheel device of the first invention includes a mounting base that is attached to the mounting target and supports the mounting target, a tip fixed to the mounting base and extending upward from the mounting base An operation member that is pulled or pushed by a user, a vehicle body frame in which the mounting base is connected through a connecting shaft so as to be relatively swingable in the front-rear direction, and a vehicle body frame that is rotatable through the axle A traveling body that has a front wheel and a rear wheel that are pivotally supported, supports a load acting on the mounting base, and travels by rolling the front wheel and the rear wheel by an external force acting via the operation member; A swing arm that is swingably connected to a vehicle body frame of the traveling body via a swing shaft, and extends from the swing shaft toward the front of the traveling body, and an extension in the swing arm Axle at the tip of the part In the traveling posture in which the auxiliary wheel rotatably supported and the front wheel and the rear wheel of the traveling body are in contact with the traveling plane, the outer peripheral front end of the auxiliary wheel is in front of the outer peripheral front end of the front wheel and The center of rotation of the auxiliary wheel is located in front of and above the center of swing of the swing arm, and the straight line between the center of rotation of the auxiliary wheel and the center of swing of the swing arm is forward of the traveling plane. A support mechanism that supports the swing arm at a position that is inclined upward (hereinafter referred to as “standby position”), and the swing arm that is supported by the support mechanism at the standby position are in the standby state. Allowing to swing up and down between the position and the upper limit position above it, and prohibiting the upward swing exceeding the upper limit position by stopping the swing arm at the upper limit position Stopper means The auxiliary wheel is abutted against the step wall surface when the traveling body moves forward in the traveling posture, and rolls up and rolls on the step wall surface. in by the auxiliary wheel is increased rolling step wall, the der from the standby position which rises swung toward the upper limit position is, the traveling body, the mounting base coupled to the vehicle frame By supporting the load of the mounting object acting on the vehicle body, the load of the mounting object acts on the swing arm that is separate from the body frame, thereby preventing the swinging movement of the swing arm from being disturbed. Furthermore, the traveling body in the traveling posture is moved forward on the traveling plane toward the stepped wall surface by the pulling force of the operation member, and this forward movement causes the shaft to be supported at the forefront of the traveling direction. The auxiliary wheel is brought into collision contact with the step wall surface, and external force accompanying the collision contact acts on the swing arm, so that the auxiliary wheel rolls upward along the step wall surface and moves upward. By this rolling, the swing arm is lifted and swung from the standby position toward the upper limit position and reaches the upper limit position to be stopped by the stopper means, and in this stopped state, the operation member is further pulled upward. it allows the traveling body is rotated around the connecting shaft of said mounting pedestal, Ru der made a step beyond posture lifted by the front portion of the traveling body is moved away from the traveling plane.
第2発明の車輪装置は、第1発明の車輪装置において、前記支持機構は、前記走行姿勢において、前記揺動アームを前記待機位置で支持することによって、前記補助輪を、前記走行体の前輪及び後輪が接地する走行平面から離間した空中位置に保持するものである。 The wheel device according to a second aspect of the present invention is the wheel device according to the first aspect , wherein the support mechanism supports the swing arm at the standby position in the traveling posture, thereby supporting the auxiliary wheel and the front wheel of the traveling body. In addition, the rear wheel is held at an aerial position separated from the traveling plane on which the rear wheel comes into contact.
第3発明の車輪装置は、第2発明の車輪装置において、前記支持機構は、前記揺動アームに車軸を介して回動自在に軸支される車輪であって、前記走行姿勢において、前記走行体の前輪及び後輪が接地する走行平面に接地可能で、この走行平面との接地によって前記揺動アームを前記待機位置にて支持する支持輪を備えている。 Wheel devices of the third invention, in the wheel assembly of the second invention, the support mechanism is a wheel that is rotatably supported via an axle to the swinging arm, in the traveling position, the traveling A support wheel that can be grounded to a traveling plane on which the front and rear wheels of the body are grounded and supports the swing arm at the standby position by the grounding with the traveling plane is provided.
第4発明の車輪装置は、第3発明の車輪装置において、前記補助輪は、前記支持輪に比べて小径かつ軽量の車輪である。 Wheel devices of the fourth invention, in the wheel device of the third aspect of the present invention, the auxiliary wheel is a wheel of smaller diameter and lighter than the support wheels.
第5発明の車輪装置は、第1発明の車輪装置において、前記補助輪は、前記走行姿勢において前記走行体の前輪及び後輪と一緒に走行平面に接地可能に形成されている。 A wheel device according to a fifth aspect is the wheel device according to the first aspect , wherein the auxiliary wheel is formed so as to be able to come into contact with a traveling plane together with a front wheel and a rear wheel of the traveling body in the traveling posture.
第6発明の車輪装置は、取付対象物に取り付けられ当該取付対象物を支持する取付台座と、その取付台座に固定され当該取付台座側から上方に延設され先端部が使用者により引っ張られ又は押される操作部材と、前記取付台座が前後方向へ相対的に揺動自在に連結軸を介して連結される車体フレームとその車体フレームに車軸を介して回動自在に軸支される前輪及び後輪とを有し、前記取付台座に作用する荷重を支持するとともに前記操作部材を介して作用する外力により前記前輪及び後輪が転動して走行する走行体と、その走行体の車体フレームに揺動軸を介して揺動自在に連結され、且つ、その揺動軸から前記走行体の前方へ向けて延出される揺動アームと、その揺動アームにおける延出部分の先端部に車軸を介して回動自在に軸支される第1補助輪と、その第1補助輪の車軸と前記揺動アームにおける揺動軸との間部分に車軸を介して回動自在に軸支される車輪であって、前記走行体の前輪及び後輪が走行平面に接地した走行姿勢において、(a)当該車輪の外周前端が前記前輪の外周前端よりも前側にあって前記第1補助輪の外周前端よりも後方下方にあり且つ当該車輪が走行平面に接地されるとともに、(b)当該走行平面との接地によって、前記第1補助輪の外周前端が前記前輪の外周前端よりも前側となり且つその第1補助輪の回転中心が前記揺動アームの揺動中心よりも前方上方となる位置(以下「待機位置」という。)にて、前記揺動アームを支持するとともに、(c)このように揺動アームを支持することによって、前記第1補助輪を走行平面から離間した空中位置にて支持する第2補助輪と、その第2補助輪により前記待機位置で支持される前記揺動アームが、その待機位置とそれより上方にある上限位置との間で上昇揺動および下降揺動することを許容し、その揺動アームを前記上限位置で制止することにより当該上限位置を越える上昇揺動を禁止するストッパ手段とを備えており、前記第1補助輪は、前記走行姿勢において、前記走行体が前進することによって、段差壁面に当接され、その段差壁面を上昇転動するものであり、前記揺動アームは、前記走行姿勢において、前記第1補助輪が段差壁面を上昇転動することによって、前記待機位置から前記上限位置へ向かって上昇揺動するものであり、前記第2補助輪は、前記揺動アームが前記待機位置から上昇揺動した状態で、前記第1補助輪と一緒に、又は、この第1補助輪に代わって段差壁面に当接可能であって、この段差壁面との当接状態において、当該第2補助輪の回転中心が前記揺動アームの揺動中心よりも前方上方となるものである。 The wheel device according to the sixth aspect of the present invention is a mounting base that is attached to the mounting target and supports the mounting target, and is fixed to the mounting base and extends upward from the mounting base, and the tip is pulled by the user. An operating member to be pushed, a vehicle body frame in which the mounting base is pivotably connected in the front-rear direction via a connecting shaft, and a front wheel and a rear wheel that are pivotally supported by the vehicle body frame via an axle A traveling body that has wheels and supports the load acting on the mounting pedestal and travels by rolling the front wheels and the rear wheels by an external force acting through the operation member, and a vehicle body frame of the traveling body. An oscillating arm connected to the oscillating shaft through an oscillating shaft and extending forward from the oscillating shaft toward the front of the traveling body, and an axle at an end of the extending portion of the oscillating arm. Is pivotally supported via A wheel that is pivotally supported via a wheel axle between a first auxiliary wheel and an axle of the first wheel and a swing shaft of the swing arm, the front wheel of the traveling body; In a traveling posture in which the rear wheel is in contact with the traveling plane, (a) the front end of the outer periphery of the wheel is in front of the front end of the outer periphery of the front wheel, and is rearward and lower than the front end of the outer periphery of the first auxiliary wheel. (B) by contact with the traveling plane, the outer peripheral front end of the first auxiliary wheel is located in front of the outer peripheral front end of the front wheel, and the rotation center of the first auxiliary wheel is swung by the ground contact with the traveling plane. The swing arm is supported at a position that is forward and upper than the swing center of the arm (hereinafter referred to as “standby position”), and (c) the swing arm is supported in this manner, thereby 1 Auxiliary wheel separated from the running plane The second auxiliary wheel supported at the position and the swinging arm supported at the standby position by the second auxiliary wheel are swung up and down between the standby position and an upper limit position above the standby position. Stopper means for permitting rocking and inhibiting the rocking arm at the upper limit position to prevent ascending rocking exceeding the upper limit position, and the first auxiliary wheel has the running posture When the traveling body moves forward, it is brought into contact with the stepped wall surface and rolls up and down the stepped wall surface. The swing arm is configured such that the first auxiliary wheel moves the stepped wall surface in the traveling posture. Ascending and rolling, the second auxiliary wheel swings upward from the standby position toward the upper limit position, and the second auxiliary wheel moves in the state in which the swing arm is lifted and swings from the standby position. 1 auxiliary wheel At the same time, or in place of the first auxiliary wheel, it is possible to contact the step wall surface. In the contact state with the step wall surface, the rotation center of the second auxiliary wheel is the swing center of the swing arm. It is the upper front.
第7発明の車輪装置は、第6発明の車輪装置において、前記揺動アームは、前記走行姿勢において、前記第2補助輪が段差壁面で上昇転動することによって、前記上限位置へ向かって更に上昇揺動されるものである。 A wheel device according to a seventh aspect is the wheel device according to the sixth aspect , wherein the swing arm further moves toward the upper limit position when the second auxiliary wheel rolls up and rolls on the step wall surface in the traveling posture. Ascending and swinging.
第8発明の車輪装置は、第6発明又は第7発明の車輪装置において、前記第1補助輪は、前記第2補助輪に比べて小径かつ軽量の車輪である。 A wheel device according to an eighth aspect is the wheel device according to the sixth or seventh aspect , wherein the first auxiliary wheel is a wheel having a smaller diameter and a lighter weight than the second auxiliary wheel.
第9発明の車輪装置は、第1発明又は第5発明の車輪装置において、前記支持機構は、前記揺動アームに車軸を介して回動自在に軸支される車輪であって、前記走行姿勢において、前記走行体の前輪及び後輪が接地する走行平面に接地可能で、この走行平面との接地によって前記揺動アームを前記待機位置にて支持する補助輪として兼用されるものである。 A wheel device according to a ninth aspect is the wheel device according to the first or fifth aspect , wherein the support mechanism is a wheel that is pivotally supported by the swing arm via an axle, and the travel posture The vehicle can be grounded on a traveling plane where the front and rear wheels of the traveling body are grounded, and is also used as an auxiliary wheel for supporting the swing arm at the standby position by grounding with the traveling plane.
上記した第1発明から第9発明のいずれかの車輪装置によれば、取付対象物が取付台座に取り付けられて支持される。 According to the wheel device of any one of the first to ninth inventions described above, the attachment object is attached to and supported by the attachment base.
この車輪装置を走行平面で通常走行させる場合、使用者によって、操作部材が進行方向前方(単に「前方」ともいう。)又は進行方向後方(単に「後方」ともいう。)に傾けられ、この操作部材の先端部が前方斜め上方へ引っ張られ又は前方斜め下方へ押されると、走行体の車体フレームに操作部材の傾斜方向に一致する方向に作用する外力が加えられ、この外力が推進力となって走行体が前方へ走行して取付対象物が移動させられる。 When the wheel device is normally traveled on the travel plane, the user tilts the operation member forward in the traveling direction (also simply referred to as “front”) or backward in the traveling direction (also simply referred to as “rear”). When the front end of the member is pulled forward obliquely upward or pushed forward obliquely downward, an external force acting in a direction that matches the inclination direction of the operating member is applied to the body frame of the traveling body, and this external force becomes a propulsive force. Thus, the traveling body travels forward and the attachment object is moved.
このように走行平面を通常走行する場合、車輪装置は、その走行体が走行姿勢となっており、前輪及び後輪が一緒(同時)に走行平面に接地した状態で転動することで、前方へ向かって移動する。また、この車輪装置は、走行平面の前方に段差壁面が立設されている場合に、例えば、操作部材が前方斜め上方に引っ張り上げられることで、その段差壁面を乗り越え、段差壁面の上にある走行平面へと上昇移動することができる。 Thus, when the vehicle travels normally on the traveling plane, the wheel device has a traveling posture and rolls in a state where the front wheels and the rear wheels are grounded together (simultaneously) on the traveling plane. Move towards. In addition, when the step wall surface is erected in front of the traveling plane, this wheel device is over the step wall by, for example, pulling the operation member obliquely upward and forward, and is on the step wall. It can move up to the traveling plane.
車輪装置が段差(段差壁面)を乗り越える場合、操作部材を介して前方斜め上方へ引き上げる外力を加えながら、走行姿勢の走行体を、当該段差壁面へ向かって走行平面上で前進走行させると、車輪装置における進行方向最前部に軸支される補助輪(又は第1補助輪)が、段差壁面に衝突(当接)させられる。 When the wheel device gets over the step (step wall surface), if the traveling body in the running posture moves forward on the travel plane toward the step wall while applying an external force that is pulled upward and obliquely upward via the operation member, the wheel An auxiliary wheel (or a first auxiliary wheel) that is pivotally supported at the forefront portion in the traveling direction of the apparatus is caused to collide (contact) with the step wall surface.
この補助輪(又は第1補助輪)は、揺動アームの先端部に軸支されており、走行体が走行姿勢で走行する場合に、揺動アームが支持機構(又は第2補助輪)により待機位置に支持されるときには、前輪よりも前側に配置されるので、真っ先に段差壁面に衝突して、この衝突による外力を揺動アームに対して作用させる。 The auxiliary wheel (or the first auxiliary wheel) is pivotally supported at the tip of the swing arm, and when the traveling body travels in the traveling posture, the swing arm is supported by the support mechanism (or the second auxiliary wheel). When it is supported at the standby position, it is disposed in front of the front wheels, so that it collides first with the stepped wall surface, and an external force caused by this collision is applied to the swing arm.
ここで、補助輪(又は第1補助輪)が段差壁面に衝突した後、走行体が前方へ更に前進移動させられると、この前進移動に伴って、補助輪(又は第1補助輪)が、段差壁面を上方へ向けて転動して上昇移動させられるとともに、揺動アームが、待機位置から上限位置へ向かって上昇揺動される。そして、この揺動アームが上限位置に到達すると、この揺動アームがストッパ手段によって制止される。 Here, after the auxiliary wheel (or the first auxiliary wheel) collides with the stepped wall surface, when the traveling body is further moved forward, the auxiliary wheel (or the first auxiliary wheel) is moved along with the forward movement. The step wall surface is rolled upward to move upward, and the swing arm is swinged upward from the standby position toward the upper limit position. When the swing arm reaches the upper limit position, the swing arm is stopped by the stopper means.
そして、このように揺動アームの上昇揺動が制限された状態で、操作部材が前方斜め上方に更に引っ張られると、走行体(車体フレーム)が操作部材の連結軸を中心として回転させられ、それに伴って走行体の前側部分が上昇させられる。すると、この走行体の車体フレームに軸支されている前輪が走行平面から離反して浮き上がり、走行体(車体フレーム)の前側部分が持ち上げられた姿勢となり、車輪装置を段差越えさせ易くなる。 And when the operating member is further pulled forward and obliquely upward in a state where the swinging movement of the swinging arm is restricted in this way, the traveling body (body frame) is rotated around the connecting shaft of the operating member, Along with this, the front portion of the traveling body is raised. Then, the front wheel pivotally supported on the vehicle body frame of the traveling body is lifted away from the traveling plane, and the front portion of the traveling body (body frame) is lifted, and the wheel device can easily be stepped over the step.
本発明の車輪装置によれば、走行体が走行姿勢の場合、支持機構(又は第2補助輪)は、揺動アームを待機位置に支持でき、この待機位置で揺動アームを支持することによって、補助輪(又は第1補助輪)の外周前端を前輪の外周前端よりも前側に突出させることができ、なおかつ、補助輪(又は第1補助輪)の回転中心を揺動アームの揺動中心よりも前方上方に配置させることができる。 According to the wheel device of the present invention, when the traveling body is in the traveling posture, the support mechanism (or the second auxiliary wheel) can support the swing arm at the standby position, and by supporting the swing arm at the standby position. The outer peripheral front end of the auxiliary wheel (or the first auxiliary wheel) can protrude forward from the outer peripheral front end of the front wheel, and the rotation center of the auxiliary wheel (or first auxiliary wheel) is the swing center of the swing arm. It can arrange | position to the front upper direction rather than.
すると、走行体が走行姿勢のとき、補助輪(又は第1補助輪)の回転中心及び揺動アームの揺動中心を結ぶ軸間直線は、走行平面に対して前方上方に傾斜した格好となるため、この格好で補助輪(又は第1補助輪)が段差壁面に衝突すると、当該補助輪を段差壁面の上方へ自然と転動させることができる。 Then, when the traveling body is in the traveling posture, the straight line between the axes connecting the rotation center of the auxiliary wheel (or the first auxiliary wheel) and the swing center of the swing arm is inclined forward and upward with respect to the travel plane. Therefore, when the auxiliary wheel (or the first auxiliary wheel) collides with the stepped wall surface in this appearance, the auxiliary wheel can be naturally rolled above the stepped wall surface.
さすれば、この補助輪(又は第1補助輪)の上昇転動に伴って、揺動アームが待機位置側から上限位置へ向けて揺動させられ、この揺動アームの上昇揺動に伴わせて走行姿勢をしていた走行体の前側部分を上昇させることができ、その結果、前側を高く後側を低くして傾いた姿勢へとスムーズに移行できるという効果がある。 Then, as the auxiliary wheel (or first auxiliary wheel) moves up and down, the swing arm is swung from the standby position side toward the upper limit position. Thus, the front side portion of the traveling body that has been in the running posture can be raised, and as a result, there is an effect that the front side can be raised and the rear side can be lowered to smoothly move to a tilted posture.
また、走行姿勢において揺動アームが支持機構(又は第2補助輪)によって待機位置に支持される結果、補助輪(又は第1補助輪)の回転中心及び揺動アームの揺動中心を結ぶ軸間直線が走行平面に対して前方上方に傾斜した格好となるため、補助輪(又は第1補助輪)が段差壁面に当接(衝突)した後、走行体を段差壁面に接近させるように操作部材を引っ張ることで、その引っ張りに伴う外力で、補助輪(又は第1補助輪)が揺動アームに押されて段差壁面を自然と上昇転動させられ、この上昇転動に伴って揺動アームも自然と上昇揺動させられる。 In addition, as a result of the swing arm being supported at the standby position by the support mechanism (or the second auxiliary wheel) in the traveling posture, the axis connecting the rotation center of the auxiliary wheel (or the first auxiliary wheel) and the swing center of the swing arm. Since the straight line is inclined forward and upward with respect to the traveling plane, after the auxiliary wheel (or first auxiliary wheel) abuts (collises) with the stepped wall surface, the traveling body is operated to approach the stepped wall surface. By pulling the member, the auxiliary wheel (or the first auxiliary wheel) is pushed by the swinging arm by the external force accompanying the pulling, and the stepped wall surface is naturally rolled up. The arm is also raised and swung naturally.
このため、補助輪(又は第1補助輪)が段差壁面に衝突した際に、上記した特許文献1の車輪装置のように、補助輪(又は第1補助輪)が段差壁面を下向きに転動して揺動アームが走行体と走行平面との間に折れ込んでしまうという、不具合を防止できるという効果がある。
For this reason, when the auxiliary wheel (or the first auxiliary wheel) collides with the stepped wall surface, the auxiliary wheel (or the first auxiliary wheel) rolls the stepped wall surface downward like the wheel device of
ここで、第6発明から第8発明のいずれかの車輪装置にあっては、段差の高低差が比較的小さな場合、揺動アームが上限位置に到達する以前(ストッパ手段により制止される以前)に、第1補助輪が段差壁面を乗り越えてしまったり、或いは、第1補助輪が段差壁面や段差上側の走行平面に当接せずに第2補助輪が段差壁面に直接に当接してしまう場合も想定される。 Here, in the wheel device according to any one of the sixth to eighth inventions , when the difference in level of the step is relatively small, before the swing arm reaches the upper limit position (before being stopped by the stopper means). In addition, the first auxiliary wheel gets over the stepped wall surface, or the first auxiliary wheel does not contact the stepped wall surface or the traveling plane above the step, and the second auxiliary wheel directly contacts the stepped wall surface. Cases are also envisaged.
もっとも、第6発明から第8発明のいずれかの車輪装置にあっては、仮に、第1補助輪に代わって、第2補助輪が段差壁面と当接したような場合であっても、この第2補助輪の回転中心及び揺動アームの揺動中心を結ぶ軸間直線が走行平面に対して前方上方に傾斜した格好となるため、第2補助輪が段差壁面に当接した後、走行体を段差壁面に接近させるように操作部材を引っ張ると、その力で、第2補助輪が揺動アームに押されて段差壁面を自然と上昇転動させられる。 However, in the wheel device according to any one of the sixth to eighth inventions , even if the second auxiliary wheel is in contact with the stepped wall surface instead of the first auxiliary wheel, Since the inter-axis straight line connecting the rotation center of the second auxiliary wheel and the swing center of the swing arm is inclined forward and upward with respect to the travel plane, the second auxiliary wheel is brought into contact with the step wall surface and then traveled. When the operating member is pulled so as to bring the body closer to the stepped wall surface, the second auxiliary wheel is pushed by the swing arm by the force, and the stepped wall surface is naturally raised and rolled.
このため、第2補助輪が段差壁面に当接した際に、上記した特許文献1の車輪装置のように、第2補助輪が段差壁面を下向きに転動して揺動アームが走行体と走行平面との間に折れ込んでしまうという、不具合を防止できるという効果がある。
For this reason, when the second auxiliary wheel comes into contact with the stepped wall surface, the second auxiliary wheel rolls downward on the stepped wall surface as in the wheel device of
そのうえ、取付対象物は取付台座によって支持され、なおかつ、この取付台座は、揺動アームとは別体の走行体の車体フレームに支持されているので、取付対象物の荷重が揺動アームに作用して負荷となることを防止でき、かかる荷重の作用によって揺動アームの上昇揺動が妨害されることを防止できるという効果もある。 In addition, the mounting object is supported by the mounting base, and this mounting base is supported by the body frame of the traveling body separate from the swinging arm, so that the load of the mounting target acts on the swinging arm. Thus, there is an effect that it can be prevented from becoming a load, and the upward swing of the swing arm can be prevented from being disturbed by the action of the load.
また、揺動アームは、補助輪(又は第1補助輪若しくは第2補助輪)を介して段差壁面と接触するので、かかる補助輪を段差壁面に当接転動させつつ、当該揺動アームの上昇揺動が行われるため、揺動アームと段差壁面との間に生じる摩擦抵抗を低減でき、その分、揺動アームの上昇揺動をスムーズに行えるという効果がある。 Further, since the swing arm comes into contact with the stepped wall surface via the auxiliary wheel (or the first auxiliary wheel or the second auxiliary wheel), the swinging arm of the swing arm is brought into contact with the stepped wall surface while rolling. Since the upward swing is performed, the frictional resistance generated between the swing arm and the stepped wall surface can be reduced, and the lift swing of the swing arm can be smoothly performed correspondingly.
特に、第2発明又は第6発明から第8発明のいずれかの車輪装置によれば、走行姿勢において、補助輪(又は第1補助輪)は、走行平面から離間した空中位置で支持されるので、走行平面上を接地転動する必要がなく、その分の走行平面との間に生じる走行抵抗を低減できるという効果がある。 In particular, according to the wheel device of any one of the second invention or the sixth to eighth inventions , the auxiliary wheel (or the first auxiliary wheel) is supported at an aerial position separated from the traveling plane in the traveling posture. There is no need for rolling on the traveling plane, and there is an effect that the traveling resistance generated between the traveling plane and the corresponding traveling plane can be reduced.
また、第3発明又は第6発明から第8発明のいずれかの車輪装置によれば、支持輪(又は第2補助輪)によって、揺動アームを待機位置で支持することができ、補助輪(又は第1補助輪)を空中で支持する複雑な機構が不要となり、車輪装置全体の構造を簡素化できるという効果がある。 Moreover, according to the wheel device of any of the third invention or the sixth invention to the eighth invention , the swing arm can be supported at the standby position by the support wheel (or the second auxiliary wheel), and the auxiliary wheel ( Alternatively, a complicated mechanism for supporting the first auxiliary wheel) in the air becomes unnecessary, and the structure of the entire wheel device can be simplified.
また、第4発明又は第8発明の車輪装置によれば、補助輪(又は第1補助輪)は、支持輪(又は第2補助輪)に比べて小径かつ軽量の車輪であるので、補助輪(又は第1補助輪)を段差壁面にて転動させる場合にその転動に要する慣性を支持輪(又は第2補助輪)に比べて小さくして転動させ易くできるという効果がある。これによって、揺動アームの上昇揺動を円滑に行えるという効果がある。 Further, according to the wheel device of the fourth invention or the eighth invention , the auxiliary wheel (or the first auxiliary wheel) is a wheel having a smaller diameter and lighter than the supporting wheel (or the second auxiliary wheel). When rolling (or the first auxiliary wheel) on the stepped wall surface, there is an effect that the inertia required for the rolling can be made smaller than that of the support wheel (or the second auxiliary wheel) to facilitate the rolling. As a result, there is an effect that the swinging and swinging of the swinging arm can be performed smoothly.
また、第5発明から第8発明のいずれかの車輪装置によれば、補助輪(又は第2補助輪)は、走行姿勢において走行体の前輪及び後輪と一緒に走行平面に接地転動可能に形成されるので、この補助輪(又は第2補助輪)自体を空中で支持する機構が別途不要となり、車輪装置の構造を簡素化できるという効果がある。 Further, according to any one of the fifth to eighth inventions , the auxiliary wheel (or the second auxiliary wheel) can be grounded to the traveling plane together with the front and rear wheels of the traveling body in the traveling posture. Therefore, there is no need for a separate mechanism for supporting the auxiliary wheel (or the second auxiliary wheel) in the air, and the structure of the wheel device can be simplified.
また、第9発明の車輪装置によれば、補助輪自体が支持機構となって、揺動アームを待機位置で支持することができ、走行姿勢において走行体の前輪及び後輪と一緒に走行平面に接地転動可能に形成されるので、別途、補助輪を空中で支持する複雑な機構を設ける必要もなく、車輪装置全体の構造をより一層簡素化できるという効果がある。 Further, according to the wheel device of the ninth aspect of the invention , the auxiliary wheel itself serves as a support mechanism, and the swing arm can be supported at the standby position, and the traveling plane is moved together with the front and rear wheels of the traveling body in the traveling posture. Therefore, there is no need to separately provide a complicated mechanism for supporting the auxiliary wheel in the air, and the structure of the entire wheel device can be further simplified.
以下、本発明の実施形態について説明する。 Hereinafter, embodiments of the present invention will be described.
まず、第1発明に係る発明について、第一の実施形態の車輪装置(1)は、
取付対象物(90)に取り付けられ取付対象物(90)を支持する取付台座(2)と、
その取付台座(2)に固定され取付台座(2)側から上方に延設され先端部(93)が使用者により引っ張られ又は押される操作部材(92)と、
取付台座(2)が前後方向へ相対的に揺動自在に連結軸(2A)を介して連結される車体フレーム(5A)とその車体フレーム(5A)に車軸(3A,4A)を介して回動自在に軸支される前輪(3)及び後輪(4)とを有し、取付台座(2)に作用する荷重を支持するとともに操作部材(92)を介して作用する外力により前輪(3)及び後輪(4)が転動して走行する走行体(5)と、
その走行体(5)の車体フレーム(5A)に揺動軸(6A)を介して揺動自在に連結され、且つ、その揺動軸(6A)から走行体(5)の前方へ向けて延出される揺動アーム(6)と、
その揺動アーム(6)における延出部分の先端部に車軸(7A)を介して回動自在に軸支される補助輪(7)と、
走行体(5)の前輪(3)及び後輪(4)が走行平面(RP)に接地した走行姿勢(図2、図6(a)に示す姿勢。以下同じ。)において、補助輪(7)の外周前端(ef7)が前輪(3)の外周前端(ef3)よりも前側にあり且つその補助輪(7)の回転中心(P7)が揺動アーム(6)の揺動中心(P6)よりも前方上方となる待機位置(図2、図6(a)に示す位置。以下同じ。)にて、揺動アーム(6)を支持する支持機構(8)と、
その支持機構(8)により待機位置で支持される揺動アーム(6)が、その待機位置とそれより上方にある上限位置(図6(b)に示す位置。以下同じ。)との間で上昇揺動および下降揺動することを許容し、その揺動アーム(6)を上限位置で制止することにより上限位置を越える上昇揺動を禁止するストッパ手段(10A)とを備えており、
補助輪(7)は、走行姿勢において、走行体(5)が前進することによって、段差壁面(SW)に当接され、その段差壁面(SW)を上昇転動するものであり、
揺動アーム(6)は、走行姿勢において、補助輪(7)が段差壁面(SW)を上昇転動することによって、待機位置から上限位置へ向かって上昇揺動するものである。
First, about the invention which concerns on 1st invention , the wheel apparatus (1) of 1st embodiment is:
An attachment pedestal (2) attached to the attachment object (90) and supporting the attachment object (90);
An operating member (92) fixed to the mounting base (2) and extending upward from the mounting base (2) side, and the tip (93) being pulled or pushed by the user;
A vehicle body frame (5A) in which the mounting pedestal (2) is connected to the vehicle body frame (5A) via the connecting shaft (2A) so as to be relatively swingable in the front-rear direction and the vehicle body frame (5A) through the axles (3A, 4A). It has a front wheel (3) and a rear wheel (4) that are movably supported, and supports the load acting on the mounting base (2) and the front wheel (3 by external force acting through the operating member (92). ) And the rear body (4) rolls and travels (5),
The traveling body (5) is connected to the vehicle body frame (5A) via a swing shaft (6A) so as to be swingable, and extends from the swing shaft (6A) toward the front of the traveling body (5). A swinging arm (6) to be taken out;
An auxiliary wheel (7) pivotally supported on the tip of the extending portion of the swing arm (6) via an axle (7A);
In the traveling posture (the posture shown in FIGS. 2 and 6A, the same applies hereinafter) in which the front wheels (3) and the rear wheels (4) of the traveling body (5) are in contact with the traveling plane (RP), the auxiliary wheels (7 ) Is on the front side of the outer front end (ef3) of the front wheel (3), and the rotation center (P7) of the auxiliary wheel (7) is the swing center (P6) of the swing arm (6). A support mechanism (8) for supporting the swing arm (6) at a standby position (a position shown in FIG. 2 and FIG.
The swing arm (6) supported at the standby position by the support mechanism (8) is between the standby position and the upper limit position (the position shown in FIG. 6B, the same applies hereinafter) located above the standby position. Stopper means (10A) that allows upward and downward swinging and inhibits the upward and downward swing exceeding the upper limit position by stopping the swing arm (6) at the upper limit position;
The auxiliary wheel (7) is brought into contact with the step wall surface (SW) when the traveling body (5) moves forward in the running posture, and rolls up the step wall surface (SW).
In the running posture, the swing arm (6) swings upward from the standby position toward the upper limit position when the auxiliary wheel (7) rolls up the stepped wall surface (SW).
第1発明に係る発明について、第二の実施形態の車輪装置(20)は、
取付対象物(90)に取り付けられ取付対象物(90)を支持する取付台座(2)と、
その取付台座(2)に固定され取付台座(2)側から上方に延設され先端部(93)が使用者により引っ張られ又は押される操作部材(92)と、
取付台座(2)が前後方向へ相対的に揺動自在に連結軸(2A)を介して連結される車体フレーム(25A)とその車体フレーム(25A)に車軸(23A,4A)を介して回動自在に軸支される前輪(23)及び後輪(4)とを有し、取付台座(2)に作用する荷重を支持するとともに操作部材(92)を介して作用する外力により前輪(3)及び後輪(4)が転動して走行する走行体(25)と、
その走行体(25)の車体フレーム(25A)に揺動軸(26A)を介して揺動自在に連結され、且つ、その揺動軸(26A)から走行体(25)の前方へ向けて延出される揺動アーム(26)と、
その揺動アーム(26)における延出部分の先端部に車軸(7A)を介して回動自在に軸支される補助輪(7)と、
走行体(25)の前輪(23)及び後輪(4)が走行平面(RP)に接地した走行姿勢(図10、図14(a)に示す姿勢。以下同じ。)において、補助輪(7)の外周前端(ef7)が前輪(23)の外周前端(ef23)よりも前側にあり且つその補助輪(7)の回転中心(P7)が揺動アーム(26)の揺動中心(P26)よりも前方上方となる待機位置(図10、図14(a)に示す位置。以下同じ。)にて、揺動アーム(26)を支持する支持機構(8)と、
その支持機構(8)により待機位置で支持される揺動アーム(26)が、その待機位置とそれより上方にある上限位置(図14(b)に示す位置。以下同じ。)との間で上昇揺動および下降揺動することを許容し、その揺動アーム(26)を上限位置で制止することにより上限位置を越える上昇揺動を禁止するストッパ手段(10A)とを備えており、
補助輪(7)は、走行姿勢において、走行体(25)が前進することによって、段差壁面(SW)に当接され、その段差壁面(SW)を上昇転動するものであり、
揺動アーム(26)は、走行姿勢において、補助輪(7)が段差壁面(SW)を上昇転動することによって、待機位置から上限位置へ向かって上昇揺動するものである。
About the invention which concerns on 1st invention , the wheel apparatus (20) of 2nd embodiment is
An attachment pedestal (2) attached to the attachment object (90) and supporting the attachment object (90);
An operating member (92) fixed to the mounting base (2) and extending upward from the mounting base (2) side, and the tip (93) being pulled or pushed by the user;
A vehicle body frame (25A) in which the mounting pedestal (2) is connected to the vehicle body frame (25A) via the connection shaft (2A) so as to be relatively swingable in the front-rear direction, and the vehicle body frame (25A) is rotated through the axles (23A, 4A) It has a front wheel (23) and a rear wheel (4) that are pivotally supported, and supports the load acting on the mounting base (2), and the front wheel (3 by external force acting through the operating member (92). ) And the traveling body (25) in which the rear wheel (4) rolls and travels,
The traveling body (25) is swingably coupled to the vehicle body frame (25A) via a swing shaft (26A), and extends from the swing shaft (26A) toward the front of the traveling body (25). A swing arm (26) to be taken out;
An auxiliary wheel (7) pivotally supported on the tip of the extending portion of the swing arm (26) via an axle (7A);
In the traveling posture (the posture shown in FIGS. 10 and 14A, the same applies hereinafter) in which the front wheels (23) and the rear wheels (4) of the traveling body (25) are in contact with the traveling plane (RP), the auxiliary wheels (7 ) Is on the front side of the front peripheral end (ef23) of the front wheel (23), and the rotation center (P7) of the auxiliary wheel (7) is the swing center (P26) of the swing arm (26). A support mechanism (8) that supports the swing arm (26) at a standby position (a position shown in FIG. 10 and FIG.
The swing arm (26) supported at the standby position by the support mechanism (8) is between the standby position and an upper limit position (a position shown in FIG. 14B, the same applies hereinafter) located above the standby position. Stopper means (10A) that allows upward and downward swinging and inhibits the upward and downward swinging beyond the upper limit position by stopping the swinging arm (26) at the upper limit position;
The auxiliary wheel (7) is brought into contact with the step wall surface (SW) when the traveling body (25) moves forward in the running posture, and rolls up the step wall surface (SW).
The swing arm (26) swings upward from the standby position toward the upper limit position when the auxiliary wheel (7) rolls up the stepped wall surface (SW) in the running posture.
第1発明に係る発明について、第三の実施形態の車輪装置(30)は、
取付対象物(90)に取り付けられ取付対象物(90)を支持する取付台座(2)と、
その取付台座(2)に固定され取付台座(2)側から上方に延設され先端部(93)が使用者により引っ張られ又は押される操作部材(92)と、
取付台座(2)が前後方向へ相対的に揺動自在に連結軸(2A)を介して連結される車体フレーム(35A)とその車体フレーム(35A)に車軸(3A,4A)を介して回動自在に軸支される前輪(3)及び後輪(4)とを有し、取付台座(2)に作用する荷重を支持するとともに操作部材(92)を介して作用する外力により前輪(3)及び後輪(4)が転動して走行する走行体(35)と、
その走行体(35)の車体フレーム(35A)に揺動軸(36A)を介して揺動自在に連結され、且つ、その揺動軸(36A)から走行体(35)の前方へ向けて延出される揺動アーム(36)と、
その揺動アーム(36)における延出部分の先端部に車軸(8A)を介して回動自在に軸支される補助輪(8)と、
走行体(35)の前輪(3)及び後輪(4)が走行平面(RP)に接地した走行姿勢(図17、図21(a)に示す姿勢。以下同じ。)において、補助輪(8)の外周前端(ef8)が前輪(3)の外周前端(ef3)よりも前側にあり且つその補助輪(8)の回転中心(P8)が揺動アーム(36)の揺動中心(P36)よりも前方上方となる待機位置(図17、図21(a)に示す位置。以下同じ。)にて、揺動アーム(36)を支持する支持機構(8)と、
その支持機構(8)により待機位置で支持される揺動アーム(36)が、その待機位置とそれより上方にある上限位置(図21(b)に示す位置。以下同じ。)との間で上昇揺動および下降揺動することを許容し、その揺動アーム(36)を上限位置で制止することにより上限位置を越える上昇揺動を禁止するストッパ手段(10A)とを備えており、
補助輪(8)は、走行姿勢において、走行体(35)が前進することによって、段差壁面(SW)に当接され、その段差壁面(SW)を上昇転動するものであり、
揺動アーム(36)は、走行姿勢において、補助輪(8)が段差壁面(SW)を上昇転動することによって、待機位置から上限位置へ向かって上昇揺動するものである。
About the invention which concerns on 1st invention , the wheel apparatus (30) of 3rd embodiment is
An attachment pedestal (2) attached to the attachment object (90) and supporting the attachment object (90);
An operating member (92) fixed to the mounting base (2) and extending upward from the mounting base (2) side, and the tip (93) being pulled or pushed by the user;
A vehicle body frame (35A) in which the mounting base (2) is connected to the vehicle body frame (35A) via the connection shaft (2A) so as to be swingable relatively in the front-rear direction, and the vehicle body frame (35A) is rotated through the axles (3A, 4A). It has a front wheel (3) and a rear wheel (4) that are movably supported, and supports the load acting on the mounting base (2) and the front wheel (3 by external force acting through the operating member (92). ) And the rear wheel (4) rolls and travels (35),
The traveling body (35) is swingably coupled to the vehicle body frame (35A) via a swing shaft (36A), and extends from the swing shaft (36A) toward the front of the traveling body (35). A swinging arm (36) to be taken out;
An auxiliary wheel (8) pivotally supported at the tip of the extending portion of the swing arm (36) via an axle (8A);
In the traveling posture (the posture shown in FIGS. 17 and 21A, the same applies hereinafter) in which the front wheels (3) and the rear wheels (4) of the traveling body (35) are in contact with the traveling plane (RP), the auxiliary wheels (8 ) Is on the front side of the front outer end (ef3) of the front wheel (3), and the rotation center (P8) of the auxiliary wheel (8) is the swing center (P36) of the swing arm (36). A support mechanism (8) for supporting the swing arm (36) at a standby position (a position shown in FIG. 17 and FIG.
The swing arm (36) supported at the standby position by the support mechanism (8) is between the standby position and an upper limit position above it (the position shown in FIG. 21 (b); the same applies hereinafter). Stopper means (10A) that allows upward and downward swinging and inhibits the upward and downward swinging exceeding the upper limit position by stopping the swinging arm (36) at the upper limit position;
The auxiliary wheel (8) is brought into contact with the stepped wall surface (SW) when the traveling body (35) moves forward in the traveling posture, and rolls up the stepped wall surface (SW).
The swing arm (36) swings upward from the standby position toward the upper limit position when the auxiliary wheel (8) rolls up the stepped wall surface (SW) in the running posture.
第1発明に係る発明について、第四の実施形態の車輪装置(40)は、
取付対象物(90)に取り付けられ取付対象物(90)を支持する取付台座(2)と、
その取付台座(2)に固定され取付台座(2)側から上方に延設され先端部(93)が使用者により引っ張られ又は押される操作部材(92)と、
取付台座(2)が前後方向へ相対的に揺動自在に連結軸(2A)を介して連結される車体フレーム(45A)とその車体フレーム(45A)に車軸(23A,4A)を介して回動自在に軸支される前輪(23)及び後輪(4)とを有し、取付台座(2)に作用する荷重を支持するとともに操作部材(92)を介して作用する外力により前輪(23)及び後輪(4)が転動して走行する走行体(45)と、
その走行体(45)の車体フレーム(45A)に揺動軸(46A)を介して揺動自在に連結され、且つ、その揺動軸(46A)から走行体(45)の前方へ向けて延出される揺動アーム(46)と、
その揺動アーム(46)における延出部分の先端部に車軸(8A)を介して回動自在に軸支される補助輪(8)と、
走行体(45)の前輪(23)及び後輪(4)が走行平面(RP)に接地した走行姿勢(図22、図26(a)に示す姿勢。以下同じ。)において、補助輪(8)の外周前端(ef8)が前輪(23)の外周前端(ef23)よりも前側にあり且つその補助輪(8)の回転中心(P8)が揺動アーム(46)の揺動中心(P46)よりも前方上方となる待機位置(図22、図26(a)に示す位置。以下同じ。)にて、揺動アーム(46)を支持する支持機構(8)と、
その支持機構(8)により待機位置で支持される揺動アーム(46)が、その待機位置とそれより上方にある上限位置(図26(b)に示す位置。以下同じ。)との間で上昇揺動および下降揺動することを許容し、その揺動アーム(46)を上限位置で制止することにより上限位置を越える上昇揺動を禁止するストッパ手段(10A)とを備えており、
補助輪(8)は、走行姿勢において、走行体(45)が前進することによって、段差壁面(SW)に当接され、その段差壁面(SW)を上昇転動するものであり、
揺動アーム(46)は、走行姿勢において、補助輪(8)が段差壁面(SW)を上昇転動することによって、待機位置から上限位置へ向かって上昇揺動するものである。
About the invention which concerns on 1st invention , the wheel apparatus (40) of 4th embodiment is:
An attachment pedestal (2) attached to the attachment object (90) and supporting the attachment object (90);
An operating member (92) fixed to the mounting base (2) and extending upward from the mounting base (2) side, and the tip (93) being pulled or pushed by the user;
A vehicle body frame (45A) to which the mounting pedestal (2) is connected via a connecting shaft (2A) so as to be relatively swingable in the front-rear direction, and the vehicle body frame (45A) is rotated through the axles (23A, 4A). It has a front wheel (23) and a rear wheel (4) that are pivotally supported, and supports the load acting on the mounting base (2) and also by means of an external force acting via the operating member (92). ) And the traveling body (45) on which the rear wheel (4) rolls and travels,
The traveling body (45) is swingably coupled to the vehicle body frame (45A) via a swing shaft (46A), and extends from the swing shaft (46A) toward the front of the traveling body (45). A swinging arm (46) to be taken out;
An auxiliary wheel (8) pivotally supported on the tip of the extending portion of the swing arm (46) via an axle (8A);
In the traveling posture (the posture shown in FIGS. 22 and 26A, the same applies hereinafter) in which the front wheels (23) and the rear wheels (4) of the traveling body (45) are in contact with the traveling plane (RP), the auxiliary wheels (8 ) Is on the front side of the outer front end (ef23) of the front wheel (23), and the rotation center (P8) of the auxiliary wheel (8) is the swing center (P46) of the swing arm (46). A support mechanism (8) for supporting the swing arm (46) at a standby position (a position shown in FIG. 22 and FIG.
The swing arm (46) supported at the standby position by the support mechanism (8) is between the standby position and the upper limit position (the position shown in FIG. 26 (b), the same applies hereinafter) located above the standby position. Stopper means (10A) that allows upward and downward swinging and inhibits the upward and downward swinging exceeding the upper limit position by stopping the swinging arm (46) at the upper limit position;
The auxiliary wheel (8) is brought into contact with the step wall surface (SW) when the traveling body (45) moves forward in the running posture, and rolls up the step wall surface (SW).
In the traveling posture, the swing arm (46) swings upward from the standby position toward the upper limit position when the auxiliary wheel (8) rolls up the stepped wall surface (SW).
第1発明に係る発明について、第五の実施形態の車輪装置(50)は、
取付対象物(90)に取り付けられ取付対象物(90)を支持する取付台座(2)と、
その取付台座(2)に固定され取付台座(2)側から上方に延設され先端部(93)が使用者により引っ張られ又は押される操作部材(92)と、
取付台座(2)が前後方向へ相対的に揺動自在に連結軸(2A)を介して連結される車体フレーム(25A)とその車体フレーム(25A)に車軸(23A,4A)を介して回動自在に軸支される前輪(23)及び後輪(4)とを有し、取付台座(2)に作用する荷重を支持するとともに操作部材(92)を介して作用する外力により前輪(23)及び後輪(4)が転動して走行する走行体(25)と、
その走行体(25)の車体フレーム(25A)に揺動軸(26A)を介して揺動自在に連結され、且つ、その揺動軸(26A)から走行体(25)の前方へ向けて延出される揺動アーム(26)と、
その揺動アーム(26)における延出部分の先端部に車軸(7A)を介して回動自在に軸支される補助輪(7)と、
走行体(25)の前輪(23)及び後輪(4)が走行平面(RP)に接地した走行姿勢(図27、図28(太線)に示す姿勢。以下同じ。)において、補助輪(7)の外周前端(ef7)が前輪(23)の外周前端(ef23)よりも前側にあり且つその補助輪(7)の回転中心(P7)が揺動アーム(26)の揺動中心(P26)よりも前方上方となる待機位置(図27、図28(太線)に示す位置。以下同じ。)にて、揺動アーム(26)を支持する支持機構(51)と、
その支持機構(51)により待機位置で支持される揺動アーム(26)が、その待機位置とそれより上方にある上限位置(図28(細線)に示す位置。以下同じ。)との間で上昇揺動および下降揺動することを許容し、その揺動アーム(26)を上限位置で制止することにより上限位置を越える上昇揺動を禁止するストッパ手段(10A)とを備えており、
補助輪(7)は、走行姿勢において、走行体(25)が前進することによって、段差壁面(SW)に当接され、その段差壁面(SW)を上昇転動するものであり、
揺動アーム(26)は、走行姿勢において、補助輪(7)が段差壁面(SW)を上昇転動することによって、待機位置から上限位置へ向かって上昇揺動するものである。
About the invention which concerns on 1st invention , the wheel apparatus (50) of 5th embodiment is:
An attachment pedestal (2) attached to the attachment object (90) and supporting the attachment object (90);
An operating member (92) fixed to the mounting base (2) and extending upward from the mounting base (2) side, and the tip (93) being pulled or pushed by the user;
A vehicle body frame (25A) in which the mounting pedestal (2) is connected to the vehicle body frame (25A) via the connection shaft (2A) so as to be relatively swingable in the front-rear direction, and the vehicle body frame (25A) is rotated through the axles (23A, 4A) It has a front wheel (23) and a rear wheel (4) that are pivotally supported, and supports the load acting on the mounting base (2) and also by means of an external force acting via the operating member (92). ) And the traveling body (25) in which the rear wheel (4) rolls and travels,
The traveling body (25) is swingably coupled to the vehicle body frame (25A) via a swing shaft (26A), and extends from the swing shaft (26A) toward the front of the traveling body (25). A swing arm (26) to be taken out;
An auxiliary wheel (7) pivotally supported on the tip of the extending portion of the swing arm (26) via an axle (7A);
In the traveling posture (the posture shown in FIGS. 27 and 28 (thick line); the same applies hereinafter) in which the front wheels (23) and the rear wheels (4) of the traveling body (25) are in contact with the traveling plane (RP), the auxiliary wheels (7 ) Is on the front side of the front peripheral end (ef23) of the front wheel (23), and the rotation center (P7) of the auxiliary wheel (7) is the swing center (P26) of the swing arm (26). A support mechanism (51) for supporting the swing arm (26) at a standby position (a position shown in FIG. 27 and FIG. 28 (thick line); the same applies hereinafter) at the front upper side.
The swing arm (26) supported at the standby position by the support mechanism (51) is between the standby position and an upper limit position (position shown in FIG. 28 (thin line); the same applies hereinafter) located above the standby position. Stopper means (10A) that allows upward and downward swinging and inhibits the upward and downward swinging beyond the upper limit position by stopping the swinging arm (26) at the upper limit position;
The auxiliary wheel (7) is brought into contact with the step wall surface (SW) when the traveling body (25) moves forward in the running posture, and rolls up the step wall surface (SW).
The swing arm (26) swings upward from the standby position toward the upper limit position when the auxiliary wheel (7) rolls up the stepped wall surface (SW) in the running posture.
第2発明に係る発明について、第一、第二又は第五の実施形態の車輪装置(1,20,50)は、
支持機構(8,8,51)は、走行姿勢において、揺動アーム(6,26,26)を待機位置で支持することによって、補助輪(7,7,7)を、走行体(5,25,25)の前輪(3,23,23)及び後輪(4,4,4)が接地する走行平面(RP)から離間した空中位置に保持するものである。
About the invention which concerns on 2nd invention , the wheel apparatus (1, 20, 50) of 1st, 2nd or 5th embodiment is as follows.
The support mechanism (8, 8, 51) supports the swinging arm (6, 26, 26) at the standby position in the traveling posture, thereby supporting the auxiliary wheels (7, 7, 7) to the traveling body (5, 5). The front wheels (3, 23, 23) and the rear wheels (4, 4, 4) of the 25, 25) are held at an aerial position separated from the traveling plane (RP) where they contact the ground.
第3発明に係る発明について、第一又は第二の実施形態の車輪装置(1,20)は、
支持機構(8,8)は、揺動アーム(6,26)に車軸(6A,26A)を介して回動自在に軸支される車輪であって、走行姿勢において、走行体(5,25)の前輪(3,23)及び後輪(4,4)が接地する走行平面(RP)に接地可能で、この走行平面(RP)との接地によって揺動アーム(6,26)を待機位置にて支持する支持輪(8,8)である車輪装置(1,20)。
Regarding the invention according to the third invention , the wheel device (1, 20) of the first or second embodiment is
The support mechanism (8, 8) is a wheel that is rotatably supported by the swing arm (6, 26) via the axle (6A, 26A). ) Can be grounded to the traveling plane (RP) where the front wheels (3, 23) and the rear wheels (4, 4) are grounded, and the swing arm (6, 26) is placed in the standby position by the grounding with the traveling plane (RP). Wheel device (1, 20) which is a support wheel (8, 8) supported by
第4発明に係る発明について、第一又は第二の実施形態の車輪装置(1,20)は、
補助輪(7,7)は、支持輪(8,8)に比べて小径かつ軽量の車輪である。
About the invention which concerns on 4th invention , the wheel apparatus (1, 20) of 1st or 2nd embodiment is,
The auxiliary wheels (7, 7) are small-diameter and lightweight wheels compared to the support wheels (8, 8).
第5発明に係る発明について、第三又は第四の実施形態の車輪装置(30,40)は、
補助輪(8,8)は、走行姿勢において走行体(35,45)の前輪(3,23)及び後輪(4,4)と一緒に走行平面(RP)に接地可能に形成されるものである。
About the invention which concerns on 5th invention , the wheel apparatus (30, 40) of 3rd or 4th embodiment is,
The auxiliary wheels (8, 8) are formed so as to be able to come into contact with the traveling plane (RP) together with the front wheels (3, 23) and the rear wheels (4, 4) of the traveling body (35, 45) in the traveling posture. It is.
第9発明に係る発明について、第一乃至第四の実施形態の車輪装置(1,20,30,40)は、
支持機構(8,8,8,8)は、揺動アーム(6,26,36,46)に車軸(8A,8A,8A,8A)を介して回動自在に軸支される車輪であって、走行姿勢において、走行体(5,25,35,45)の前輪(3,23,3,23)及び後輪(4,4,4,4)が接地する走行平面(RP)に接地可能で、この走行平面(RP)との接地によって揺動アーム(6,26,36,46)を待機位置にて支持する補助輪として兼用されるものである。
About the invention which concerns on 9th invention , the wheel apparatus (1, 20, 30, 40) of 1st thru | or 4th embodiment is
The support mechanism (8, 8, 8, 8) is a wheel that is rotatably supported on the swing arm (6, 26, 36, 46) via the axle (8A, 8A, 8A, 8A). In the running posture, the ground (5, 25, 35, 45) of the traveling body (5, 25, 35, 45) is grounded on the traveling plane (RP) where the front wheels (3, 23, 3, 23) and the rear wheels (4, 4, 4, 4) are grounded It can be used as an auxiliary wheel that supports the swing arm (6, 26, 36, 46) at the standby position by grounding with the travel plane (RP).
第6発明に係る発明について、第一の実施形態の車輪装置(1)は、
取付対象物(90)に取り付けられ取付対象物(90)を支持する取付台座(2)と、
その取付台座(2)に固定され取付台座(2)側から上方に延設され先端部(93)が使用者により引っ張られ又は押される操作部材(92)と、
取付台座(2)が前後方向へ相対的に揺動自在に連結軸(2A)を介して連結される車体フレーム(5A)とその車体フレーム(5A)に車軸(3A,4A)を介して回動自在に軸支される前輪(3)及び後輪(4)とを有し、取付台座(2)に作用する荷重を支持するとともに操作部材(92)を介して作用する外力により前輪(3)及び後輪(4)が転動して走行する走行体(5)と、
その走行体(5)の車体フレーム(5A)に揺動軸(6A)を介して揺動自在に連結され、且つ、その揺動軸(6A)から走行体(5)の前方へ向けて延出される揺動アーム(6)と、
その揺動アーム(6)における延出部分の先端部に車軸(7A)を介して回動自在に軸支される第1補助輪(7)と、
その第1補助輪(7)の車軸(7A)と揺動アーム(6)における揺動軸(6A)との間部分に車軸(8A)を介して回動自在に軸支される車輪(8)であって、走行体(5)の前輪(3)及び後輪(4)が走行平面(RP)に接地した走行姿勢(図2、図6(a)に示す姿勢。以下同じ。)において、(a)車輪(8)の外周前端(ef8)が前輪(3)の外周前端(ef3)よりも前側にあって第1補助輪(7)の外周前端(ef7)よりも後方下方にあり且つ車輪(8)が走行平面(RP)に接地されるとともに、(b)この走行平面(RP)との接地によって、第1補助輪(7)の外周前端(ef7)が前輪(3)の外周前端(ef3)よりも前側となり且つその第1補助輪(7)の回転中心(P7)が揺動アーム(6)の揺動中心(6A)よりも前方上方となる待機位置(図2、図6(a)に示す姿勢。以下同じ。)にて、揺動アーム(6)を支持するとともに、(c)このように揺動アーム(6)を支持することによって、第1補助輪(7)を走行平面(RP)から離間した空中位置にて支持する第2補助輪(8)と、
その第2補助輪(8)により待機位置で支持される揺動アーム(6)が、その待機位置とそれより上方にある上限位置(図6(b)に示す位置。以下同じ。)との間で上昇揺動および下降揺動することを許容し、その揺動アーム(6)を上限位置で制止することにより上限位置を越える上昇揺動を禁止するストッパ手段(10A)とを備えており、
第1補助輪(7)は、走行姿勢において、走行体(5)が前進することによって、段差壁面(SW)に当接され、その段差壁面(SW)を上昇転動するものであり、
揺動アーム(6)は、走行姿勢において、第1補助輪(7)が段差壁面(SW)を上昇転動することによって、待機位置から上限位置へ向かって上昇揺動するものであり、
第2補助輪(8)は、揺動アーム(6)が待機位置から上昇揺動した状態で、第1補助輪(7)と一緒に、又は、この第1補助輪(7)に代わって段差壁面(SW)に当接可能であって、この段差壁面(SW)との当接状態において、第2補助輪(8)の回転中心(P8)が揺動アーム(6)の揺動中心(P6)よりも前方上方となるものである。
About the invention which concerns on 6th invention , the wheel apparatus (1) of 1st embodiment is
An attachment pedestal (2) attached to the attachment object (90) and supporting the attachment object (90);
An operating member (92) fixed to the mounting base (2) and extending upward from the mounting base (2) side, and the tip (93) being pulled or pushed by the user;
A vehicle body frame (5A) in which the mounting pedestal (2) is connected to the vehicle body frame (5A) via the connecting shaft (2A) so as to be relatively swingable in the front-rear direction and the vehicle body frame (5A) through the axles (3A, 4A). It has a front wheel (3) and a rear wheel (4) that are movably supported, and supports the load acting on the mounting base (2) and the front wheel (3 by external force acting through the operating member (92). ) And the rear body (4) rolls and travels (5),
The traveling body (5) is connected to the vehicle body frame (5A) via a swing shaft (6A) so as to be swingable, and extends from the swing shaft (6A) toward the front of the traveling body (5). A swinging arm (6) to be taken out;
A first auxiliary wheel (7) pivotally supported on the tip of the extending portion of the swing arm (6) via an axle (7A);
Wheels (8) pivotally supported via the axle (8A) between the axle (7A) of the first auxiliary wheel (7) and the oscillation axis (6A) of the oscillation arm (6). ), In a traveling posture (the posture shown in FIGS. 2 and 6A, the same applies hereinafter) in which the front wheels (3) and the rear wheels (4) of the traveling body (5) are in contact with the traveling plane (RP). (A) The outer peripheral front end (ef8) of the wheel (8) is in front of the outer peripheral front end (ef3) of the front wheel (3) and is rearward and lower than the outer peripheral front end (ef7) of the first auxiliary wheel (7). The wheel (8) is grounded to the travel plane (RP), and (b) the outer peripheral front end (ef7) of the first auxiliary wheel (7) is brought into contact with the travel plane (RP) by the ground contact with the travel plane (RP). The center of rotation (P7) of the first auxiliary wheel (7) is in front of the outer peripheral front end (ef3) and the center of swing of the swing arm (6). 6A), the swing arm (6) is supported at the standby position (the posture shown in FIG. 2 and FIG. 6A, the same applies hereinafter) at the front upper position, and (c) the swing arm in this way. A second auxiliary wheel (8) supporting the first auxiliary wheel (7) at an aerial position spaced from the travel plane (RP) by supporting (6);
The swing arm (6) supported at the standby position by the second auxiliary wheel (8) is located between the standby position and an upper limit position (position shown in FIG. 6 (b), which is the same hereinafter) located above the standby position. And stopper means (10A) that allows the rocking arm (6) to swing up and down and stop the rocking arm (6) at the upper limit position, thereby prohibiting the upward rocking beyond the upper limit position. ,
The first auxiliary wheel (7) is brought into contact with the step wall surface (SW) when the traveling body (5) moves forward in the running posture, and rolls up the step wall surface (SW).
The swing arm (6) is configured to swing upward from the standby position toward the upper limit position when the first auxiliary wheel (7) rolls up the stepped wall surface (SW) in the running posture.
The second auxiliary wheel (8), together with the first auxiliary wheel (7) or in place of the first auxiliary wheel (7), with the swing arm (6) swinging upward from the standby position. The center of rotation (P8) of the second auxiliary wheel (8) is the center of swing of the swing arm (6) in contact with the step wall (SW). (P6) is located on the front upper side.
第6発明に係る発明について、第一の実施形態の車輪装置(20)は、
取付対象物(90)に取り付けられ取付対象物(90)を支持する取付台座(2)と、
その取付台座(2)に固定され取付台座(2)側から上方に延設され先端部(93)が使用者により引っ張られ又は押される操作部材(92)と、
取付台座(2)が前後方向へ相対的に揺動自在に連結軸(2A)を介して連結される車体フレーム(25A)とその車体フレーム(25A)に車軸(23A,4A)を介して回動自在に軸支される前輪(23)及び後輪(4)とを有し、取付台座(2)に作用する荷重を支持するとともに操作部材(92)を介して作用する外力により前輪(23)及び後輪(4)が転動して走行する走行体(25)と、
その走行体(25)の車体フレーム(25A)に揺動軸(26A)を介して揺動自在に連結され、且つ、その揺動軸(26A)から走行体(25)の前方へ向けて延出される揺動アーム(26)と、
その揺動アーム(26)における延出部分の先端部に車軸(7A)を介して回動自在に軸支される第1補助輪(7)と、
その第1補助輪(7)の車軸(7A)と揺動アーム(26)における揺動軸(26A)との間部分に車軸(8A)を介して回動自在に軸支される車輪(8)であって、走行体(25)の前輪(23)及び後輪(4)が走行平面(RP)に接地した走行姿勢(図10、図14(a)に示す姿勢。以下同じ。)において、(a)車輪(8)の外周前端(ef8)が、前輪(3)の外周前端(ef3)よりも前側にあって第1補助輪(7)の外周前端(ef7)よりも後方下方にあり、且つ、車輪(8)が走行平面(RP)に接地されるとともに、(b)この走行平面(RP)との接地によって、第1補助輪(7)の外周前端(ef7)が前輪(3)の外周前端(ef3)よりも前側となり且つその第1補助輪(7)の回転中心(P7)が揺動アーム(6)の揺動中心(6A)よりも前方上方となる待機位置(図10、図14(a)に示す姿勢。以下同じ。)にて、揺動アーム(26)を支持するとともに、(c)このように揺動アーム(26)を支持することによって、第1補助輪(7)を走行平面(RP)から離間した空中位置にて支持する第2補助輪(8)と、
その第2補助輪(8)により待機位置で支持される揺動アーム(26)が、その待機位置とそれより上方にある上限位置(図14(b)に示す位置。以下同じ。)との間で上昇揺動および下降揺動することを許容し、その揺動アーム(26)を上限位置で制止することにより上限位置を越える上昇揺動を禁止するストッパ手段(10A)とを備えており、
第1補助輪(7)は、走行姿勢において、走行体(25)が前進することによって、段差壁面(SW)に当接され、その段差壁面(SW)を上昇転動するものであり、
揺動アーム(26)は、走行姿勢において、第1補助輪(7)が段差壁面(SW)を上昇転動することによって、待機位置から上限位置へ向かって上昇揺動するものであり、
第2補助輪(8)は、揺動アーム(26)が待機位置から上昇揺動した状態で、第1補助輪(7)と一緒に、又は、この第1補助輪(7)に代わって段差壁面(SW)に当接可能であって、この段差壁面(SW)との当接状態において、第2補助輪(8)の回転中心(P8)が揺動アーム(26)の揺動中心(P6)よりも前方上方となるものである。
About the invention which concerns on 6th invention , the wheel apparatus (20) of 1st embodiment is
An attachment pedestal (2) attached to the attachment object (90) and supporting the attachment object (90);
An operating member (92) fixed to the mounting base (2) and extending upward from the mounting base (2) side, and the tip (93) being pulled or pushed by the user;
A vehicle body frame (25A) in which the mounting pedestal (2) is connected to the vehicle body frame (25A) via the connection shaft (2A) so as to be relatively swingable in the front-rear direction, and the vehicle body frame (25A) is rotated through the axles (23A, 4A) It has a front wheel (23) and a rear wheel (4) that are pivotally supported, and supports the load acting on the mounting base (2) and also by means of an external force acting via the operating member (92). ) And the traveling body (25) in which the rear wheel (4) rolls and travels,
The traveling body (25) is swingably coupled to the vehicle body frame (25A) via a swing shaft (26A), and extends from the swing shaft (26A) toward the front of the traveling body (25). A swing arm (26) to be taken out;
A first auxiliary wheel (7) pivotally supported on the tip of the extending portion of the swing arm (26) via an axle (7A);
Wheels (8) pivotally supported via the axle (8A) between the axle (7A) of the first auxiliary wheel (7) and the oscillation axis (26A) of the oscillation arm (26). ) In a traveling posture (the posture shown in FIGS. 10 and 14A, the same applies hereinafter) in which the front wheels (23) and the rear wheels (4) of the traveling body (25) are in contact with the traveling plane (RP). (A) The outer peripheral front end (ef8) of the wheel (8) is in front of the outer peripheral front end (ef3) of the front wheel (3) and is rearward and lower than the outer peripheral front end (ef7) of the first auxiliary wheel (7). And the wheel (8) is grounded to the travel plane (RP), and (b) the outer peripheral front end (ef7) of the first auxiliary wheel (7) is brought to the front wheel ( 3) and the center of rotation (P7) of the first auxiliary wheel (7) on the front side of the outer peripheral front end (ef3) of the first auxiliary wheel (7). The swing arm (26) is supported at the standby position (the posture shown in FIGS. 10 and 14A, the same shall apply hereinafter) at the front upper side of the swing center (6A) of (6). c) a second auxiliary wheel (8) supporting the first auxiliary wheel (7) at an aerial position separated from the traveling plane (RP) by supporting the swing arm (26) in this way;
The swing arm (26) supported at the standby position by the second auxiliary wheel (8) is located between the standby position and an upper limit position (position shown in FIG. 14 (b), which is the same hereinafter) located above the standby position. And stopper means (10A) for allowing upward and downward swinging between the upper limit position and prohibiting upward swinging movement beyond the upper limit position by stopping the swing arm (26) at the upper limit position. ,
In the traveling posture, the first auxiliary wheel (7) is brought into contact with the step wall surface (SW) by the traveling body (25) moving forward, and rolls up the step wall surface (SW).
The swing arm (26) swings upward from the standby position toward the upper limit position when the first auxiliary wheel (7) rolls up the stepped wall surface (SW) in the running posture.
The second auxiliary wheel (8), together with the first auxiliary wheel (7) or in place of the first auxiliary wheel (7), with the swing arm (26) swinging upward from the standby position. The center of rotation (P8) of the second auxiliary wheel (8) is the center of swing of the swing arm (26) in contact with the step wall (SW) and in contact with the step wall (SW). (P6) is located on the front upper side.
第7発明に係る発明について、第一又は第二の実施形態の車輪装置(1,20)は、
揺動アーム(6,26)は、走行姿勢において、第2補助輪(8)が段差壁面(SW)で上昇転動することによって、上限位置へ向かって更に上昇揺動されるものである。
About the invention which concerns on 7th invention , the wheel apparatus (1, 20) of 1st or 2nd embodiment is,
The swing arm (6, 26) is further swung upwardly toward the upper limit position when the second auxiliary wheel (8) rolls up and down on the step wall surface (SW) in the running posture.
第8発明に係る発明について、第一又は第二の実施形態の車輪装置(1,20)は、
第1補助輪(7,7)は、第2補助輪(8,8)に比べて小径かつ軽量の車輪である。
Regarding the invention according to the eighth invention , the wheel device (1, 20) of the first or second embodiment is
The first auxiliary wheels (7, 7) are small-diameter and lightweight wheels compared to the second auxiliary wheels (8, 8).
以下、本発明の好ましい実施例について、添付図面を参照して説明する。図1は、本発明の一実施例である車輪装置1が取り付けられたキャリーカート90を示した図であり、図1(a)は、キャリーカート90の正面図であり、図1(b)は、キャリーカート90の側面図である。
Hereinafter, preferred embodiments of the present invention will be described with reference to the accompanying drawings. FIG. 1 is a view showing a
<車輪装置>
図1に示すように、車輪装置1は、取付対象物であるキャリーカート90のカート荷台91の幅方向両側(図1(a)左右両側)にそれぞれ取り付けられて使用されるものである。ここで、取付対象物は、例えば、車輪付きキャリーケース(キャリーバック)、手荷物運搬用のキャリーカート90や、その他の車輪を介して移動可能な運搬用器具であり、本実施例では、車輪装置1を取り付ける取付対象物の一例として、この手荷物運搬用のキャリーカート90を用いて、以下説明する。
<Wheel device>
As shown in FIG. 1, the
<キャリーカート>
キャリーカート90は、荷物(図示せず。)を載置するためのカート荷台91と、使用者により引っ張られ又は押されて操作される操作ハンドル92とを備えている。キャリーカート90のカート荷台91には、車輪装置1の取付台座2が取り付けられている。キャリーカート90は、この取付台座2によって、車輪装置1に連結されかつ支持される。
<Carry cart>
The
操作ハンドル92は、カート荷台91を介して車輪装置1の取付台座2に連結固定されている。この操作ハンドル92は、取付台座2側から上方に延設されており、その先端部が使用者により引っ張られ又は押される把持部93となっている。
The operation handle 92 is connected and fixed to the mounting
なお、取付対象物がキャリーカート90の場合、本発明の「操作部材」には「操作ハンドル92及び把持部93」が相当するが、例えば、取付対象物がキャリーケースの場合には、キャリーケースに装備される牽引用の操作ハンドル及び把持部などが、本発明の「操作部材」に相当する。
Note that when the attachment object is the
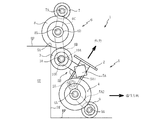
図2から図4は、本実施例の車輪装置1の投影図であり、図2(a)は、車輪装置1の側面図であり、図2(b)は、図2(a)について、取付台座2、走行体5及び揺動アーム6の連結構造を示すため、便宜上、後述する車輪3,4,7,8,9を2点鎖線で図示したものである。また、図3は、車輪装置1の平面図であり、図4は、車輪装置1の正面図である。なお、図2において、「前方」(前側)とは、図中左側をいい、「後方」(後側)とは、図中右側をいう。
2 to 4 are projection views of the
図2から図4に示すように、車輪装置1は、上記した取付台座2の他に、前輪3及び後輪4を有する走行体5と、揺動アーム6と、第一補助輪7と、第二補助輪8と、第三補助輪9と、ストッパ機構10とを備えている。
As shown in FIGS. 2 to 4, the
<取付台座>
取付台座2は、連結軸2Aを介して走行体5の車体フレーム5Aにおける前輪3及び後輪4の間に、前後方向へ相対的に揺動自在に連結されている。この取付台座2の連結軸2Aは、取付台座2に作用する荷重を車体フレーム5Aに伝達する。また、連結軸2Aの軸心高さ(走行平面RPから軸中心までの高さをいう。以下同じ。)h2は、後輪4の車軸4Aの軸心高さh4と等しくなっている。
<Mounting base>
The mounting
取付台座2の回転中心P2は、前輪3及び後輪4の車軸間WB内(但し、前輪3及び後輪4の回転中心P3,P4を通って走行平面RPに直交する垂直線よりも内側の範囲をいう。)に設けられることが好ましく、好適には、車体フレーム5Aの前輪3及び後輪4の車軸間WBの中間点(中点)よりも後輪4側(後側部分)に設けられている。
The center of rotation P2 of the mounting
なお、取付台座2の回転中心は取付台座2の連結軸2Aの中心が、車輪3,4,7,8,9の回転中心はその車軸3A,4A,7A,8A,9Aの中心が、揺動アーム6の揺動中心はその揺動軸6Aの中心が、それぞれ該当する。
The center of rotation of the mounting
このため、取付台座2を介して車体フレーム5Aに作用する荷重の重量配分は前輪3に比べて後輪4が大きくなり、このように前輪3側(前側部分)の重量配分を低減することによって、走行体5の前側部分は、段差を乗り越える際に浮き上がり易くなっている。
For this reason, the weight distribution of the load acting on the
<走行体>
走行体5は、取付台座2に作用するキャリーカート90等の荷重を直接支持するとともに、操作ハンドル92(図1参照。)を介して加えられる外力を受けて前輪3及び後輪4が転動して走行するものである。なお、以下の説明において、図2に示すように走行体5の前輪3及び後輪4が走行平面RPに接地した姿勢状態を「走行姿勢」という。
<Running body>
The traveling
走行体5の前輪3及び後輪4は、車体フレーム5Aに車軸3A,4Aを介して回動自在に軸支されている。前輪3は、その外径が後輪4に比べて小さく、かつ、後輪4に比べて軽量となっている。このため、走行体5の前側部分は、段差を乗り越える際に更に浮き上がり易くなっている。
The
走行体5は、前輪3の外周後端er3と後輪4の外周前端ef4との間に、前後方向に所定幅を有した間隙部5Bが設けられている。
The traveling
この走行体5の間隙部5Bは、段差越えの際に段差角部が前輪3及び後輪4間に嵌り込み易くする凹所であり、ここに段差角部が嵌り込んで引っ掛かることで、段差上側の走行平面RPに乗り上がった車輪装置1が段差角部からずり落ち難くなる(図7参照。)。
The
走行体5の車体フレーム5Aは、前輪3の車軸3Aの配設部から取付台座2の連結軸2Aの配設部にかけて山折れ「く」字状に屈曲しており、上記した前輪3及び後輪4の間隙部5Bの上方が上側に凹んだ切欠部5A1となっている。
The
また、走行体5の車体フレーム5Aは、連結軸2Aの配設部から後輪4の車軸4Aの配設部まで、走行平面RPに対して平行に後方へ延出され、この後輪4の車軸4Aの配設部で後方上方へ向けて屈曲され、この屈曲部から走行平面RPに対して後述する揺動アーム6の先腕部6Cの傾斜角度(例えば30°程度)と同角度を成して後方上方へ更に直線状に延出されている。
The
<揺動アーム>
揺動アーム6は、それとは別体に形成される走行体5の車体フレーム5Aに対し、揺動軸6Aを介して揺動自在に連結されており、この揺動軸6Aによる連結部から走行体5よりも更に前方へ向けて延出されている。
<Oscillating arm>
The
この揺動アーム6によれば、走行体5が走行姿勢で前進走行しながら、第一補助輪7が段差壁面SWに当接して上昇転動することによって、待機位置(図6(a)参照。)から上限位置(図6(b)参照。)へ向かって上昇揺動することができる。
According to the
ここで、揺動アーム6の待機位置とは、走行体5の走行姿勢(図2示す姿勢)において、第一補助輪7の外周前端ef7が前輪3の外周前端ef3よりも前側となり、且つ、その第一補助輪7の回転中心P7が揺動アーム6の揺動中心P6よりも前方上方となる位置をいう(図2(a)参照。)。
Here, the standby position of the
この揺動アーム6の揺動軸6Aは、走行体5の車体フレーム5Aの前端部にあり、前輪3の車軸3Aと同軸一体化されており、結果、揺動アーム6の揺動軸6Aと前輪3の車軸3Aとが同一位置となっている。
The
ここで、前輪3は後輪4より外径が小さい小径状の車輪であるため、走行体5が走行姿勢のときに、前輪3の回転中心(車軸の中心をいう。以下同じ。)P3及び揺動アーム6の揺動中心P6(揺動軸6Aの中心をいう。以下同じ。)は、後輪4の回転中心P4に比べて低位置となる。
Here, since the
揺動アーム6の形状は、走行体5が走行姿勢で且つ揺動アーム6が待機位置にある場合に、揺動軸6Aのある基端部から走行体5よりも前方上方へ向けて延出される基腕部6Bと、この基腕部6Bの先端から更に前方上方へ向けて所定角度(例えば30°程度)を成して傾斜した格好で直線状に延出される先腕部6Cとを備えており、この先腕部6Cと基腕部6Bとの連設部分が側面視「く」の字状に谷折れ「く」字状に屈曲した屈曲部6Dとなっている。
The shape of the
<第一補助輪>
第一補助輪7は、揺動アーム6における先腕部6Cの先端部に車軸7Aを介して回動自在に軸支されている車輪である。この第一補助輪7は、前輪3、後輪4及び第二補助輪8に比べて小径かつ軽量の車輪である。
<First auxiliary wheel>
The first
<第二補助輪>
第二補助輪8は、第一補助輪7の車軸7Aと揺動アーム6における揺動軸6Aとの間部分、具体的には、揺動アーム6の基腕部6Bと先腕部6Cとの連設部分に相当する屈曲部6Dに、車軸8Aを介して回動自在に軸支されている車輪である。
<Second auxiliary wheel>
The second
第二補助輪8は、走行体5の後輪4と外径及び重量が等しい同種の車輪であり、走行体5の前輪3及び後輪4と一緒に走行平面RPに接地した状態で、その軸心高さh8が、後輪4の車軸4A並びに取付台座2の連結軸2Aと軸心高さh4,h2と等しなっている。このため、第二補助輪8の回転中心P8は、後輪4の回転中心P4及び取付台座2の回転中心P2がいずれも同じ高さ位置となっている。これに対し、第二補助輪8の外径及びその車軸8Aの軸心高さh8は、走行体5の前輪3の外径及び軸心高さh3よりも大きくなっている。
The second
ここで、第二補助輪8は、走行体5の走行姿勢(図2に示す姿勢)において、次の(a)〜(c)のようになる。
Here, the second
(a)第二補助輪8の外周前端ef8は、前輪3の外周前端ef3よりも前側となり、且つ、第一補助輪7の外周前端ef7よりも後方下方となり、且つ、第二補助輪8は、走行平面RPに接地されて走行体5の前輪3及び後輪4とともに転動させられる(図2(a)参照。)。
(A) The outer peripheral front end ef8 of the second
(b)第二補助輪8は、その第二補助輪8が走行平面RPと接地することによって、揺動アーム6を待機位置にて支持する(図2(a)参照。)。このため、走行体5の走行姿勢において、第一補助輪7の外周前端ef7が前輪3の外周前端ef3よりも前側となり、且つ、その第一補助輪7の回転中心P7が揺動アーム6の揺動中心P6よりも前方上方となる(図2(a)参照。)。
(B) The second
(c)第二補助輪8は、上記(a)及び(b)のように揺動アーム6を支持することによって、第一補助輪7を走行平面RPから離間した空中位置にて支持する(図2(a)参照。)。
(C) The second
このように第二補助輪8は、走行体5の走行姿勢において上記(a)〜(c)に示す状態で揺動アーム6を支持しているため、第一補助輪7の回転中心P7と揺動アーム6の揺動中心P6とを結ぶ軸間直線L1は、図2(b)に示すように、走行平面RPに対して前方上方へ所定の傾斜角(図5中の傾斜角φ1)を成すように傾斜するようになる。
Thus, since the second
また、第二補助輪8は、走行体5の走行姿勢において揺動アーム6を待機位置で支持する状態で、その外周前端ef8が前輪3の外周前端ef3よりも前側にあり(図2(a)参照。)、その回転中心P8が揺動アーム6の揺動中心P6よりも前方上方となっている(図2(b)参照。)。
Further, the second
このため、揺動アーム6の揺動中心P6と第二補助輪8の回転中心P8とを結ぶ軸間直線L2も、図2(b)に示すように、走行平面RPに対して前方上方へ所定の傾斜角(図5中の傾斜角φ2)を成すように傾斜するようになる。
Therefore, the inter-axis straight line L2 connecting the swing center P6 of the
<第三補助輪>
第三補助輪9は、車体フレーム5Aの後端傾斜部5A2の先端部に、車軸9Aを介して回動自在に軸支されている。この第三補助輪9は、第一補助輪7と同種の車輪であり、その車軸9Aの軸心高さh9が第一補助輪7の車軸7Aの軸心高さh7と等しく、その外径も第一補助輪7と等しくなっている。
<Third auxiliary wheel>
The third
<ストッパ機構>
ストッパ機構10は、揺動アーム6を上限位置(図5参照。)で制止するため、上限位置で揺動アーム6を衝止する上限ストッパ10Aを有しており、この上限ストッパ10Aが車体フレーム5Aに配設固定されている。この上限ストッパ10Aは、揺動アーム6に衝止することで、その上限位置を越える上昇揺動を禁止している。
<Stopper mechanism>
The
また、ストッパ機構10は、揺動アーム6を下限位置(図5参照。)で制止するため、下限位置で揺動アーム6を衝止する下限ストッパ10Bを有しており、この下限ストッパ10Bが車体フレーム5Aに配設固定されている。この下限ストッパ10Bは、揺動アーム6に衝止することで、その下限位置を越える下降揺動を禁止している。
The
換言すれば、ストッパ機構10は、揺動アーム6が待機位置とそれより上方にある所定の上限位置との間で上昇揺動および下降揺動することを許容するとともに、揺動アーム6が待機位置とそれより下方にある所定の下限位置との間で上昇揺動および下降揺動することを許容している。
In other words, the
<揺動アームの揺動範囲>
図5は、揺動アーム6の揺動範囲を示した車輪装置1の側面図であり、揺動アーム6が上限位置にある状態と、揺動アーム6が下限位置にある状態とを、それぞれ図示したものである。
<Oscillation range of the oscillating arm>
FIG. 5 is a side view of the
図5に示すように、第一補助輪7(軸間直線L1)の揺動範囲θ1は、揺動アーム6介したストッパ機構10による揺動制限によって、待機走行姿勢における揺動アーム6の軸間直線L1が走行平面RPに対して傾斜角φ1を成す待機位置から、上方に上限角αだけ揺動した上限位置(φ1+α)まで、その待機位置から下方に下限角βだけ揺動した下限位置(φ1−β)まで、という範囲(φ1−β≦θ1≦φ1+α)となる。
As shown in FIG. 5, the swing range θ <b> 1 of the first auxiliary wheel 7 (interaxial straight line L <b> 1) is the axis of the
例えば、傾斜角φ1が約20°、上限角αが約30°、下限角βが約100°である場合、第一補助輪7の揺動範囲θ1は、走行平面RP(傾斜角0°)に対する傾斜角約20°の待機位置から更に上方に上限角約30°だけ揺動した上限位置(約50°)と、この待機位置から下方に下限角約100°だけ揺動した下限位置(約−80°)との間の範囲(概ね−80°≦θ1≦50°)となる。
For example, when the inclination angle φ1 is about 20 °, the upper limit angle α is about 30 °, and the lower limit angle β is about 100 °, the swing range θ1 of the first
また、第二補助輪8(軸間直線L2)の揺動範囲θ2は、揺動アーム6を介したストッパ機構10の揺動制限によって、待機走行姿勢における揺動アーム6の軸間直線L2が走行平面RPに対して傾斜角φ2を成す待機位置から、上方に上限角αだけ揺動した上限位置(φ2+α)まで、その待機位置から下方に下限角βだけ揺動した下限位置(φ2−β)まで、という範囲(φ2−β≦θ2≦φ2+α)となる。
Further, the swing range θ2 of the second auxiliary wheel 8 (the straight line L2 between the axes) is such that the straight line L2 between the
例えば、傾斜角φ2が約10°であって、残りが第一補助輪7と同様に、上限角αが約30°、下限角βが約100°である場合、第二補助輪8の揺動範囲θ2は、走行平面RP(傾斜角0°)に対する傾斜角10°の待機位置から更に上方に上限角約30°だけ揺動した上限位置(約40°)と、この待機位置から下方に下限角約100°だけ揺動した下限位置(約−90°)との間の範囲(概ね−90°≦θ2≦40°)となる。
For example, when the inclination angle φ2 is about 10 ° and the rest is the same as the first
<車輪装置の段差を登る動作>
図6は、車輪装置1が段差STを昇り上がる過程を図示した側面図である。以下に説明するように、車輪装置1は、段差STを昇り上がる過程において、第二補助輪8が走行平面RPに接地して揺動アーム6が待機位置にあるときの走行体5の走行姿勢(以下「待機走行姿勢」という。)(図6(a)参照。)から、揺動アーム6が上昇揺動した状態にあるときの走行体5の走行姿勢(以下「上動走行姿勢」という。)(図6(b)参照。)へと変化する。
<Climbing the step of the wheel device>
FIG. 6 is a side view illustrating a process in which the
図6(a)に示すように、走行体5が待機走行姿勢をして、車輪装置1が段差壁面SWへ向かって走行平面RPを走行し、第一補助輪7が段差壁面SWに衝突し、その後、走行体5が走行姿勢で走行平面RPを更に前進すると、図6(b)に示す位置へ向かって、第一補助輪7が揺動アーム6に押されて段差壁面SWを上方へ向けて上昇転動し、この転動に伴って揺動アーム6が揺動軸6Aを中心に上方へ向かって揺動させられる。
As shown in FIG. 6A, the traveling
このとき、揺動アーム6は、第一補助輪7の段差壁面SWへの衝突によって先腕部6Cの先端部が相対的に後方(図6左側)へ押される外力を受ける格好となる。この外力は、揺動アーム6を揺動軸6Aを中心に上方へ向けて回転させる回転力となって、揺動アーム6を、図6(a)の位置(待機位置)から図6(b)の位置(上限位置)へ向けて上昇揺動させる。すると、この揺動アーム6の上昇揺動によって、走行体5は、第二補助輪8が走行平面RPから離間されて空中位置へ浮上した上動走行姿勢の状態となる。
At this time, the
その後、走行体5が更に前進し、第一補助輪7が更に上昇転動し、揺動アーム6が更に上昇揺動すると、図6(b)に示すように、揺動アーム6がストッパ機構10の上限ストッパ10Aにより上限位置で衝止される。
Thereafter, when the traveling
すると、第一補助輪7の回転中心P7が揺動アーム6の揺動中心P6よりも前方上方となり、揺動アーム6の揺動中心P6と第一補助輪7の回転中心P7を結ぶ軸間直線L1は、走行平面RPに対して所定の傾斜角(φ1+α)(図5参照。)を成して前方上方へ傾斜した格好となる。
As a result, the rotation center P7 of the first
また、第二補助輪8の回転中心P8が揺動アーム6の揺動中心P6よりも前方上方となり、揺動アーム6の揺動中心P6と第二補助輪8の回転中心P8とを結ぶ軸間直線L2は、走行平面RPに対して所定の傾斜角(φ2+α)(図5参照。)を成して前方上方へ傾斜した格好となる。
Further, the rotation center P8 of the second
そして、このような状態となった場合に、操作ハンドル92(図1参照。)を介して車輪装置1に前方上方へ引き上げる外力が加えられると、この引き上げに伴って自然と、図6(b)の位置から図6(c)の位置まで走行体5が更に前進されるとともに第一補助輪7が更に上昇転動し、前輪3が段差下側の走行平面RPから浮き上がり、図6(c)に示すように、第二補助輪8が第一補助輪7と一緒に段差壁面SWに当接される格好となる。
In such a state, when an external force is applied to the
そして、走行体5が図6(c)の位置から図6(d)の位置まで更に前進する過程で、第二補助輪8が第一補助輪7に代わって段差壁面SWに当接されて上昇転動させられる。このように、第二補助輪8は、第一補助輪7が段差壁面SWから離反してしまった場合に、この第一補助輪7に代わって段差壁面SWを上昇転動する機能を発揮する。
In the process in which the traveling
この後、操作ハンドル92(図1参照。)を前方上方へ引き上げる外力が更に加えられ続けると、第二補助輪8が段差上側の走行平面RPに乗り上がり、図7に示す姿勢となって、それから更に、前輪3及び後輪4が段差壁面SWから段差上側の走行平面RPに順に乗り上がると、この車輪装置1の段差越えが完了する。
Thereafter, when an external force that pulls up the operation handle 92 (see FIG. 1) continues to be further applied, the second
図7は、段差STを乗り越える途中の状態にある車輪装置1の側面図である。図7に示すように、車輪装置1が段差STを乗り越える途中では、走行体5の間隙部5Bに段差角部SAが入り込んで両者が嵌り合うような格好となることで、段差上側の走行平面RPに乗り上がった前輪3が段差上側の走行平面RPから転落し難くできる。
FIG. 7 is a side view of the
しかも、車輪装置1が段差STを乗り越える途中で、走行体5の間隙部5Bに段差角部SAが嵌り込むようにして前輪3が段差上側の走行平面RPに当接し且つ後輪4が段差壁面SWが当接した場合、走行体5は間隙部5Bの上側に位置する車体フレーム5Aの部位が切欠部5A1となっていることで、車体フレーム5Aと段差角部SAとが接触干渉することが防止される。
Moreover, while the
<車輪装置の段差を降る動作>
図8は、段差STを下降する途中の状態にある車輪装置1の側面図である。図8に示すように、第三補助輪9は、この第三補助輪9側を先頭にして車輪装置1が段差STを下降する場合、段差下側の走行平面RPに真っ先に接地して、車輪装置1の段差走行を補助する。
<Operation to descend the step of the wheel device>
FIG. 8 is a side view of the
<その他の実施例>
図9から図28を参照して、上記実施例の変形例について説明する。以下、第一実施例と同一の部分には、同一の符号を付し、その説明を省略することもある。
<Other examples>
A modification of the above embodiment will be described with reference to FIGS. Hereinafter, the same parts as those in the first embodiment are denoted by the same reference numerals, and the description thereof may be omitted.
<第二実施例>
まず、図9から図16を参照して、第二実施例の車輪装置20について説明する。
<Second Example>
First, the
図9は、第二実施例の車輪装置20の使用状態を示した図であり、図9(a)は、キャリーカート90の正面図であり、図9(b)は、キャリーカート90の側面図である。また、図10から図12は、第二実施例の車輪装置20の投影図であり、図10(a)は、車輪装置20の側面図であり、図10(b)は、図10(a)について、取付台座2、走行体25及び揺動アーム26の連結構造を示すため、便宜上、後述する車輪23,4,7,8,9を2点鎖線で図示したものである。さらに、図11は、車輪装置20の平面図であり、図12は、車輪装置20の正面図である。なお、図10において、「前方」(前側)とは、図中左側をいい、「後方」(後側)とは、図中右側をいう。
FIG. 9 is a view showing a use state of the
<車輪装置>
第二実施例の車輪装置20は、上記した第一実施例の車輪装置1に対し、前輪の大径化に伴って走行フレーム及び揺動アームの形状を変更したものである。
<Wheel device>
The
図9に示すように、第二実施例の車輪装置20も、第一実施例と同様に、キャリーカート90に取り付けられて使用される。
As shown in FIG. 9, the
ここで、図10に示すように走行体25の前輪23及び後輪4が走行平面RPに接地した姿勢状態を「走行姿勢」という。
Here, as shown in FIG. 10, a posture state in which the
図10から図12に示すように、車輪装置20は、主に、取付台座2と、前輪23及び後輪4を有する走行体25と、揺動アーム26と、前補助輪7と、支持輪8と、後補助輪9と、ストッパ機構10とを備えている。
As shown in FIGS. 10 to 12, the
<取付台座>
取付台座2は、連結軸2Aを介して走行体25の車体フレーム25Aにおける前輪23及び後輪4の間に、前後方向へ相対的に揺動自在に連結されている。この連結軸2Aは、取付台座2に作用する荷重を車体フレーム25Aに伝達する。この連結軸2Aは、走行体25の走行姿勢(図10に示す姿勢)において、その軸心高さh2が後輪4の軸心高さh4と等しくなっている(図10(b)参照。)。
<Mounting base>
The mounting
取付台座2の回転中心P2は、前輪23及び後輪4の車軸間WB内(但し、前輪23及び後輪4の回転中心P23,P4を通って走行平面RPに直交する垂直線よりも内側の範囲をいう。)に設けられることが好ましく、好適には、車体フレーム5Aの前輪23及び後輪4の車軸間WBの中間点(中点)よりも後輪4側(後側部分)に設けられる。
The center of rotation P2 of the mounting
なお、取付台座2の回転中心は取付台座2の連結軸2Aの中心が、車輪23,4,7,8,9の回転中心はその車軸23A,4A,7A,8A,9Aの中心が、揺動アーム26の揺動中心はその揺動軸26Aの中心が、それぞれ該当する。
The center of rotation of the mounting
このため、取付台座2を介して車体フレーム25Aに作用する荷重の重量配分は前輪23に比べて後輪4が大きくなり、このように前輪23側(前側部分)の重量配分を低減することによって、走行体25の前側部分は、段差を乗り越える際に浮き上がり易くなる。
For this reason, the weight distribution of the load acting on the
<走行体>
走行体25は、取付台座2に作用する荷重を直接支持するとともに、操作ハンドル92(図1参照。)を介して加えられる外力を受けて前輪23及び後輪4が転動して走行するものである。前輪23及び後輪4は、車体フレーム25Aに車軸23A,4Aを介して回動自在に軸支されている。
<Running body>
The traveling
前輪23及び後輪4は、外径及び重量が等しい同種の車輪である。車体フレーム25Aは、第一実施例のものとは異なって、揺動アーム26の揺動軸26Aの配設部から、前輪23の車軸23Aの配設部と取付台座2の連結軸2Aの配設部とを経て、後輪4の車軸4Aの配設部まで直線状に延びている。
The
この車体フレーム25Aは、揺動アーム26の揺動軸26Aの配設部から前輪23の車軸23Aの配設部と取付台座2の連結軸2Aの連結部とを経て後輪4の車軸4Aの配設部まで、走行平面RPに対して平行に後方へ延出される基部25A1を備えている。
The
また、車体フレーム25Aは、その基部25A1における後輪4の車軸4Aの配設部から後方上方へ向けて屈曲され、この屈曲部から走行平面RPに対して揺動アーム26の後述する先腕部26Cと同じ傾斜角度(例えば30°程度)を成して後方上方へ更に直線状に延出される先部25A2とを有している。
Further, the
なお、走行姿勢において車体フレーム25A及び揺動アーム26の連結形態は、前輪23の車軸23Aの中心を通る垂直線L0に対し、線対称となっている。
In the running posture, the connection form of the
また、走行体25は、前輪23の外周後端er23と後輪4の外周前端ef4との間に、第一実施例の「間隙部5B」に相当するものはなく、この間隙部5Bに代わって、前輪23及び後輪4の間に、前輪23の外周における後方下側の四分の一円弧と後輪4の外周における前方下側の四分の一円弧とを輪郭とした比較的大きめの車輪間凹所25Bが設けられている。
Further, the traveling
この車輪間凹所25Bは、段差越えの際に段差角部が嵌り込み易くする凹所であり、ここに段差角部が嵌り込んで引っ掛かることで、段差上側の走行平面RPに乗り上がった車輪装置20が段差角部からずり落ち難くなる(図15参照。)。
The
<揺動アーム>
揺動アーム26は、それとは別体に形成される走行体25の車体フレーム25Aに、揺動軸26Aを介して揺動自在に連結されており、この揺動軸26Aによる連結部から走行体25よりも更に前方へ向けて直線状に延出されている。
<Oscillating arm>
The
この揺動アーム26によれば、走行体25が走行姿勢で前進走行しながら、前補助輪7が段差壁面SWに当接して上昇転動することによって、待機位置(図14(a)参照。)から上限位置(図14(b)参照。)へ向かって上昇揺動することができる。
According to the
ここで、揺動アーム26の待機位置とは、走行体25の走行姿勢(図10に示す姿勢)において、前補助輪7の外周前端ef7が前輪23の外周前端ef23よりも前側となり、且つ、その前補助輪7の回転中心P7が揺動アーム26の揺動中心P26よりも前方上方となる位置をいう(図10(a)参照。)。
Here, the standby position of the
この揺動アーム26の揺動軸26Aは、走行体25の車体フレーム25Aの前端部にあり、前輪23の車軸23Aよりも更に前方に位置しており、走行体25の走行姿勢において、その軸心高さh26が、前輪23及び後輪4の車軸23A,4A並びに連結軸2Aの軸心高さh23,h4,h2と等しくなっている。
The swinging
このため、走行姿勢において、取付台座2の回転中心P2と、前輪23及び後輪4の回転中心P23,P4と、揺動アーム26の揺動中心P26とが、いずれも同じ高さ位置となる。
Therefore, in the running posture, the rotation center P2 of the mounting
揺動アーム26の形状は、走行体25が走行姿勢で且つ揺動アーム26が待機位置にある場合に、揺動軸26Aのある基端部から走行体25よりも前方へ向けて水平延出される基腕部26Bと、この基腕部26Bの先端から更に前方上方へ向けて所定角度(例えば30°程度)を成して傾斜した格好で直線状に延出される先腕部26Cとを備えており、この先腕部26Cと基腕部26Bとの連設部分が側面視「く」の字状に谷折れ曲がった屈曲部26Dとなっている。
The shape of the
<前補助輪>
前補助輪7は、揺動アーム26における先腕部26Cの先端部に車軸7Aを介して回動自在に軸支されている車輪である。この前補助輪7は、前輪23、後輪4、及び、支持輪8に比べて小径かつ軽量の車輪である。
<Front auxiliary wheel>
The front
<支持輪>
支持輪8は、前補助輪7の車軸7Aと揺動アーム26における揺動軸26Aとの間部分、具体的には、揺動アーム26の基腕部26Bと先腕部26Cとの連設部分に相当する屈曲部26Dに、車軸8Aを介して回動自在に軸支されている車輪である。
<Support wheel>
The
支持輪8は、走行体25の前輪23及び後輪4と外径及び重量が等しい同種の車輪であり、走行体25の前輪23及び後輪4と一緒に走行平面RPに接地した状態で、その軸心高さh8が、前輪23及び後輪4の車軸23A,4A並びに取付台座2の連結軸2Aの軸心高さh23,h4,h2と等しくなっている。このため、支持輪8の回転中心P8は、前輪23、後輪4の回転中心P23,P4、取付台座2の回転中心P2及び揺動アーム26の揺動中心P26がいずれも同じ高さ位置となっている。
The
ここで、支持輪8は、走行体25の走行姿勢(図10に示す姿勢)において、次の(a)〜(c)のようになる。
Here, the
(a)支持輪8の外周前端ef8は、前輪23の外周前端ef23よりも前側となり、且つ、前補助輪7の外周前端ef7よりも後方下方となり、且つ、支持輪8は、走行平面RPに接地されて走行体25の前輪23及び後輪4とともに転動させられる(図10(a)参照。)。
(A) The outer peripheral front end ef8 of the
(b)支持輪8は、その支持輪8が走行平面RPと接地することによって、揺動アーム26を待機位置にて支持する(図10(a)参照)。このため、走行体25の走行姿勢において、前補助輪7の外周前端ef7が前輪23の外周前端ef23よりも前側となり、且つ、その前補助輪7の回転中心P7が揺動アーム26の揺動中心P26よりも前方上方となる(図10(a)参照。)。
(B) The
(c)支持輪8は、上記(a)及び(b)のように揺動アーム26を支持することによって、前補助輪7を走行平面RPから離間した空中位置にて支持する(図10(a)参照。)。
(C) The
このように支持輪8は、走行体5の走行姿勢において上記(a)〜(c)に示す状態で揺動アーム26を支持しているため、第一補助輪7の回転中心P7と揺動アーム26の揺動中心P26とを結ぶ軸間直線L1は、図10(b)に示すように、走行平面RPに対して前方上方へ所定の傾斜角(図13中の傾斜角φ1)を成すように傾斜するようになる。
Thus, since the
<後補助輪>
後補助輪9は、車体フレーム25Aの先部25A2の先端部に、車軸9Aを介して回動自在に軸支されている。この後補助輪9は、前補助輪7と同種の車輪であり、その車軸9Aの軸心高さh9が前補助輪7の車軸7Aの軸心高さh7と等しく、その外径も前補助輪7のものと等しくなっている。
<Rear assist wheel>
The rear
<ストッパ機構>
ストッパ機構10は、揺動アーム26を上限位置(図13参照。)で制止するため、上限位置で揺動アーム26を衝止する上限ストッパ10Aを有しており、この上限ストッパ10Aが車体フレーム25Aに配設固定されている。この上限ストッパ10Aは、揺動アーム26に衝止することで、その上限位置を越える上昇揺動を禁止している。
<Stopper mechanism>
The
また、ストッパ機構10は、揺動アーム26を下限位置(図13参照。)で制止するため、下限位置で揺動アーム26を衝止する下限ストッパ10Bを有しており、この下限ストッパ10Bが車体フレーム25Aに配設固定されている。この下限ストッパ10Bは、揺動アーム26に衝止することで、その下限位置を越える下降揺動を禁止している。
The
換言すれば、ストッパ機構10は、揺動アーム26が待機位置とそれより上方にある所定の上限位置との間で上昇揺動および下降揺動することを許容するとともに、揺動アーム26が待機位置とそれより下方にある所定の下限位置との間で上昇揺動および下降揺動することを許容している。
In other words, the
<揺動アームの揺動範囲>
図13は、揺動アーム26の揺動範囲を示した車輪装置20の側面図であり、揺動アーム26が上限位置にある状態と、揺動アーム26が下限位置にある状態とを、それぞれ図示したものである。
<Oscillation range of the oscillating arm>
FIG. 13 is a side view of the
図13に示すように、前補助輪7(軸間直線L1)の揺動範囲θ1は、揺動アーム26介したストッパ機構10による揺動制限によって、待機走行姿勢における揺動アーム26の軸間直線L1が走行平面RPに対して傾斜角φ1を成す待機位置から、上方に上限角αだけ揺動した上限位置(φ1+α)まで、その待機位置から下方に下限角βだけ揺動した下限位置(φ1−β)まで、という範囲(φ1−β≦θ1≦φ1+α)となる。
As shown in FIG. 13, the swing range θ1 of the front auxiliary wheel 7 (the inter-axis straight line L1) is set between the axes of the
例えば、傾斜角φ1が約15°、上限角αが約30°、下限角βが約90°である場合、前補助輪7の揺動範囲θ1は、走行平面RP(傾斜角0°)に対する傾斜角約15°の待機位置から更に上方に上限角約30°だけ揺動した上限位置(約45°)と、この待機位置から下方に下限角約90°だけ揺動した下限位置(約−75°)との間の範囲(概ね−75°≦θ1≦45°)となる。
For example, when the inclination angle φ1 is about 15 °, the upper limit angle α is about 30 °, and the lower limit angle β is about 90 °, the swing range θ1 of the front
また、支持輪8(軸間直線L2)の揺動範囲θ2は、揺動アーム26を介したストッパ機構10の揺動制限によって、待機走行姿勢における揺動アーム26の軸間直線L2が走行平面RPに対して傾斜角0°の待機位置から、上方に上限角αだけ揺動した上限位置(α)まで、その待機位置から下方に下限角βだけ揺動した下限位置(β)まで、という範囲(−β≦θ2≦α)となる。
Further, the swing range θ2 of the support wheel 8 (straight axis L2) is set so that the axis straight line L2 of the
例えば、上限角αが約30°、下限角βが約100°である場合、支持輪8の揺動範囲θ2は、走行平面RP(傾斜角0°)に対する傾斜角0°の待機位置から上方に上限角約30°だけ揺動した上限位置(約30°)と、この待機位置から下方に下限角約90°だけ揺動した下限位置(約−90°)との間の範囲(概ね−90°≦θ2≦30°)となる。
For example, when the upper limit angle α is about 30 ° and the lower limit angle β is about 100 °, the swing range θ2 of the
<車輪装置の段差を登る動作>
図14は、車輪装置20が段差STを昇り上がる過程を図示した側面図である。以下に説明するように、車輪装置20は、段差STを昇り上がる場合、支持輪8が走行平面RPに接地して揺動アーム26が待機位置にあるときの走行体25の走行姿勢(以下「待機走行姿勢」という。)(図14(a)参照。)から、揺動アーム26が上昇揺動した状態にあるときの走行体25の走行姿勢(以下「上動走行姿勢」という。)(図14(b)参照。)へと変化する。
<Climbing the step of the wheel device>
FIG. 14 is a side view illustrating a process in which the
図14(a)に示すように、走行体25が待機走行姿勢をして、車輪装置20が段差壁面SWへ向かって走行平面RPを走行し、前補助輪7が段差壁面SWに衝突し、その後、走行体25が走行姿勢で走行平面RPを前進すると、図14(b)に示す位置へ向かって、前補助輪7が揺動アーム26に押されて段差壁面SWを上方へ向けて上昇転動し、この転動に伴って揺動アーム26が揺動軸26Aを中心に上方へ向かって揺動させられる。
As shown in FIG. 14 (a), the traveling
このとき、揺動アーム26は、前補助輪7の段差壁面SWへの衝突によって先腕部26Cの先端部が相対的に後方(図14左側)へ押される外力を受ける格好となる。この外力は、揺動アーム26を揺動軸26Aを中心に上方へ向けて回転させる回転力となって、揺動アーム26を、図14(a)の位置(待機位置)から図14(b)の位置(上限位置)へ向けて上昇揺動させる。すると、この揺動アーム26の上昇揺動によって、走行体25は、支持輪8が走行平面RPから離間されて空中位置へ浮上した上動走行姿勢の状態となる。
At this time, the
その後、走行体25が更に前進し、前補助輪7が更に上昇転動し、揺動アーム26が更に上昇揺動すると、図14(b)に示すように、揺動アーム26がストッパ機構10の上限ストッパ10Aにより上限位置で衝止される。
Thereafter, when the traveling
すると、前補助輪7の回転中心P7が揺動アーム26の揺動中心P26よりも前方上方となり、揺動アーム26の揺動中心P26と前補助輪7の回転中心P7を結ぶ軸間直線L1は、走行平面RPに対して所定の傾斜角(φ1+α)(図13参照。)を成して前方上方へ傾斜した格好となる。
As a result, the rotation center P7 of the front
また、支持輪8の回転中心P8についても揺動アーム26の揺動中心P26よりも前方上方となるため、揺動アーム26の揺動中心P26と支持輪8の回転中心P8とを結ぶ軸間直線L2は、走行平面RPに対して所定の傾斜角(α)(図13参照。)を成して前方上方へ傾斜した格好となる。
Further, since the rotation center P8 of the
そして、このような状態となった場合に、操作ハンドル92(図9参照。)を介して車輪装置20に前方上方へ引き上げる外力が加えられると、この引き上げに伴って自然と、図14(b)の位置から図14(c)の位置まで走行体25が更に前進されるとともに前補助輪7が更に上昇転動し、前輪23が段差下側の走行平面RPから浮き上がり、図14(c)に示すように、支持輪8が前補助輪7と一緒に段差壁面SWに当接される格好となる。
In such a state, when an external force is applied to the
そして、走行体25が図14(c)の位置から図14(d)の位置まで更に前進する過程で、支持輪8が前補助輪7に代わって段差壁面SWに当接されて上昇転動させられる。このように、支持輪8は、前補助輪7が段差壁面SWから離反してしまった場合に、この前補助輪7に代わって段差壁面SWを上昇転動する機能を発揮する。
Then, in the process in which the traveling
この後、操作ハンドル92(図9参照。)を前方上方へ引き上げる外力が更に加えられ続けると、支持輪8が段差上側の走行平面RPに乗り上がり、図15に示す姿勢となって、それから更に、前輪23及び後輪4が段差壁面SWから段差上側の走行平面RPに順に乗り上がると、この車輪装置20の段差越えが完了する。
Thereafter, when an external force that pulls up the operation handle 92 (see FIG. 9) continues to be further applied, the
図15は、段差STを乗り越える途中の状態にある車輪装置20の側面図である。図15に示すように、車輪装置20が段差STを乗り越える途中では、走行体25の車輪間凹所25Bに段差角部SAが入り込んで両者が嵌り合うような格好となることで、段差上側の走行平面RPに乗り上がった前輪23が段差上側の走行平面RPから転落し難くできる。
FIG. 15 is a side view of the
しかも、車輪装置20が段差STを乗り越える途中で、車輪間凹所25Bに嵌り込んだ段差角部SAは前輪23及び後輪4に阻まれ、走行体25の車体フレーム25Aに接触干渉することが防止される。
Moreover, the stepped corner portion SA fitted in the
<車輪装置の段差を降る動作>
図16は、段差STを下降する途中の状態にある車輪装置20の側面図である。図16に示すように、後補助輪9は、この後補助輪9側を先頭にして車輪装置20が段差STを下降する場合、段差下側の走行平面RPに真っ先に接地して、車輪装置20の段差走行を補助する。
<Operation to descend the step of the wheel device>
FIG. 16 is a side view of the
<第三実施例>
次に、図17から図21を参照して第三実施例の車輪装置30について説明する。
<Third embodiment>
Next, the
図17から図19は、第三実施例の車輪装置30の投影図であり、図17(a)は、車輪装置30の側面図であり、図17(b)は、図17(a)について、取付台座2、走行体35及び揺動アーム36の連結構造を示すため、便宜上、後述する車輪3,4,8を2点鎖線で図示したものである。図18は、車輪装置30の平面図であり、図19は、車輪装置30の正面図である。なお、図17において、「前方」(前側)とは、図中左側をいい、「後方」(後側)とは、図中右側をいう。
17 to 19 are projection views of the
<車輪装置>
第三実施例の車輪装置30は、上記した第一実施例の車輪装置1に対し、第一補助輪及び第三補助輪を排除し、第二補助輪を単一の補助輪とし、かかる変更に伴って、走行フレーム及び揺動アームの形状を変更したものである。
<Wheel device>
The
なお、図示は省略するが、第三実施例の車輪装置30も、第一実施例の車輪装置1と同様、取付対象物であるキャリーカート90のカート荷台91の幅方向両側(図1(a)左右両側)にそれぞれ取り付けられて使用されるものである。
In addition, although illustration is abbreviate | omitted, the
ここで、図17に示すように走行体35の前輪3及び後輪4が走行平面RPに接地した姿勢状態を「走行姿勢」といい、この走行姿勢においては、車体フレーム35A及び揺動アーム36の連結形態は、前輪3の車軸3Aの中心を通る垂直線L0に対し、線対称となっている。
Here, as shown in FIG. 17, a posture state in which the
図17から図19に示すように、車輪装置30は、主に、取付台座2と、前輪3及び後輪4を有する走行体35と、揺動アーム36と、補助輪8と、ストッパ機構10とを備えている。
As shown in FIGS. 17 to 19, the
<取付台座>
取付台座2は、連結軸2Aを介して走行体35の車体フレーム35Aにおける前輪3及び後輪4の間に、前後方向へ相対的に揺動自在に連結されている。この連結軸2Aは、取付台座2に作用する荷重を車体フレーム35Aに伝達する。また、連結軸2Aは、走行体35の走行姿勢(図17に示す姿勢)において、その軸心高さh2が前輪3の車軸3Aの軸心高さh3と等しくなっている(図17(b)参照。)。
<Mounting base>
The mounting
取付台座2の回転中心P2は、前輪3及び後輪4の車軸間WB内(但し、前輪3及び後輪4の回転中心P3,P4を通って走行平面RPに直交する垂直線よりも内側の範囲をいう。)に設けられることが好ましく、本実施例では、車体フレーム35Aの前輪3及び後輪4の車軸間WBの中間点(中点)よりも僅かに前輪3側(前側部分)に設けられている。
The center of rotation P2 of the mounting
このため、取付台座2を介して車体フレーム35Aに作用する荷重全体のうち、その一部を後輪4に分配して作用させることができ、その分、前輪3側(前側部分)に作用する荷重を低減することができるので、走行体35の前側部分が段差を乗り越える際に浮き上がり易くなる。
For this reason, a part of the entire load acting on the
<走行体>
走行体35は、取付台座2に作用する荷重を直接支持するとともに、操作ハンドル92(図1参照。)を介して加えられる外力を受けて前輪3及び後輪4が転動して走行するものである。
<Running body>
The traveling
この走行体35の前輪3及び後輪4は、車体フレーム35Aに車軸3A,4Aを介して回動自在に軸支されている。前輪3は、その外径が後輪4に比べて小さく、かつ、後輪4に比べて軽量となっている。このため、走行体35の前側部分は、段差を乗り越える際に更に浮き上がり易くなっている。
The
走行体35の車体フレーム35Aは、その最前端部に揺動アーム36の揺動軸26Aが配設されており、この揺動アーム36の揺動軸36Aの配設部から前輪3の車軸3Aの配設部を経て、取付台座2の連結軸2Aの配設部まで、走行平面RPに対して平行に後方へ直線状に延出される基部35A1を備えている。
The
車体フレーム35Aは、その基部35A1における連結軸2Aの配設部で側面視「く」字状に屈曲され、この屈曲部から後側部分が、走行平面RPに対して揺動アーム36と同じ傾斜角度(例えば20°程度)を成して後方上方へ更に直線状に延出される先部35A2となっている。
The
後輪4は、車体フレーム35Aの先部35A2の先端部に、車軸4Aを介して回動自在に軸支されている。この後輪4は、補助輪8と同種の車輪であり、その車軸4Aの軸心高さh4が補助輪8の車軸8Aの軸心高さh8と等しく、その外径も補助輪8のものと等しくなっている。
The
<揺動アーム>
揺動アーム36は、それとは別体に形成される走行体35の車体フレーム35Aの基部35A1の前端部に、揺動軸36Aを介して揺動自在に連結されており、この揺動軸36Aによる連結部から走行体35よりも更に前方上方へ向けて直線状に延出されている。
<Oscillating arm>
The
この揺動アーム36によれば、走行体35が走行姿勢で前進走行しながら、補助輪8が段差壁面に当接して上昇転動することによって、待機位置(図20(a)参照。)から上限位置(図20(b)参照。)へ向かって上昇揺動することができる。
According to the
ここで、揺動アーム36の待機位置とは、走行体35の走行姿勢(図17に示す姿勢)において、補助輪8の外周前端ef8が前輪3の外周前端ef3よりも前側となり、且つ、その補助輪8の回転中心P8が揺動アーム36の揺動中心P36よりも前方上方となる位置をいう(図17(a)参照。)。
Here, the standby position of the
この揺動アーム36の揺動軸36Aは、走行体35の車体フレーム35Aの最前端部にあって、前輪3の車軸3Aよりも更に前方に位置しており、走行体35が走行姿勢である場合に、その軸心高さh36が、前輪3の車軸3A及び連結軸2Aの軸心高さh3,h2と等しく、かつ、後輪4及び補助輪8の車軸4A,8Aの軸心高さh4,h8より低くなるようになっている。
The swinging
このため、走行姿勢において、取付台座2の回転中心P2と、前輪3の回転中心P3と、揺動アーム36の揺動中心P36とが、いずれも同じ高さ位置となる。
For this reason, in the running posture, the rotation center P2 of the mounting
揺動アーム36は、走行体35が走行姿勢で且つ補助輪8が走行平面RPに接地した状態で、ちょうど待機位置に存在するようになっており、この待機位置にある状態で、揺動軸36Aの配設部から走行体35よりも前方上方へ向けて所定角度(例えば20°程度)を成して傾斜した格好で直線状に延出されている。
The
<補助輪>
補助輪8は、揺動アーム36の先端部に車軸8Aを介して回動自在に軸支されている車輪である。この補助輪8の外径及びその車軸8Aの軸心高さh8は、走行体35の後輪4の外径及び軸心高さh4と等しく、走行体35の前輪3の外径及び軸心高さh3よりも大きくなっている。
<Auxiliary wheel>
The
ここで、補助輪8は、走行体35の走行姿勢(図17に示す姿勢)において、次の(a)及び(b)のようになる。
Here, the
(a)補助輪8の外周前端ef8は、前輪3の外周前端ef3よりも前側となり、且つ、補助輪8は、走行平面RPに接地されて走行体35の前輪3及び後輪4とともに転動させられる(図17(a)参照。)。
(A) The outer peripheral front end ef8 of the
(b)補助輪8は、その補助輪8が走行平面RPと接地することによって、揺動アーム36を待機位置にて支持する(図17(a)参照。)。このため、走行体35の走行姿勢において、補助輪8の外周前端ef8が前輪3の外周前端ef3よりも前側となり、且つ、その補助輪8の回転中心P8が揺動アーム36の揺動中心P36よりも前方上方となる(図17(a)参照。)。
(B) The
このように補助輪8は、走行体5の走行姿勢において上記(a)及び(b)に示す状態で揺動アーム36を支持しているため、補助輪8の回転中心P8と揺動アーム36の揺動中心P36とを結ぶ軸間直線L1は、図17(b)に示すように、走行平面RPに対して前方上方へ所定の傾斜角(図20中の傾斜角φ1)を成すように傾斜するようになる。
Thus, since the
<ストッパ機構>
ストッパ機構10は、揺動アーム36を上限位置(図20参照。)で制止するため、上限位置で揺動アーム36を衝止する上限ストッパ10Aを有しており、この上限ストッパ10Aが車体フレーム35Aに配設固定されている。この上限ストッパ10Aは、揺動アーム36に衝止することで、その上限位置を越える上昇揺動を禁止している。
<Stopper mechanism>
The
また、ストッパ機構10は、揺動アーム36を下限位置(図20参照。)で制止するため、下限位置で揺動アーム36を衝止する下限ストッパ10Bを有しており、この下限ストッパ10Bが車体フレーム35Aに配設固定されている。この下限ストッパ10Bは、揺動アーム36に衝止することで、その下限位置を越える下降揺動を禁止している。
The
換言すれば、ストッパ機構10は、揺動アーム36が待機位置とそれより上方にある所定の上限位置との間で上昇揺動および下降揺動することを許容するとともに、揺動アーム36が待機位置とそれより下方にある所定の下限位置との間で上昇揺動および下降揺動することを許容している。
In other words, the
<揺動アームの揺動範囲>
図20は、揺動アーム36の揺動範囲を示した車輪装置30の側面図であり、揺動アーム36が上限位置にある状態と、揺動アーム36が下限位置にある状態とを、それぞれ図示したものである。
<Oscillation range of the oscillating arm>
FIG. 20 is a side view of the
図20に示すように、補助輪8(軸間直線L1)の揺動範囲θ1は、揺動アーム36を介したストッパ機構10の揺動制限によって、待機走行姿勢における揺動アーム36の軸間直線L1が走行平面RPに対して傾斜角φ1を成す待機位置から、上方に上限角αだけ揺動した上限位置(φ1+α)まで、その待機位置から下方に下限角βだけ揺動した下限位置(φ1−β)まで、という範囲(φ1−β≦θ1≦φ1+α)となる。
As shown in FIG. 20, the swing range θ <b> 1 of the auxiliary wheel 8 (straight axis L <b> 1) is between the axes of the
例えば、傾斜角φ1が約20°、上限角αが約30°、下限角βが約135°である場合、補助輪8の揺動範囲θ1は、走行平面RP(傾斜角0°)に対する傾斜角20°の待機位置から更に上方に上限角約30°だけ揺動した上限位置(約50°)と、この待機位置から下方に下限角約135°だけ揺動した下限位置(約−90°)との間の範囲(概ね−115°≦θ1≦50°)となる。
For example, when the inclination angle φ1 is about 20 °, the upper limit angle α is about 30 °, and the lower limit angle β is about 135 °, the swing range θ1 of the
<車輪装置の段差を登る動作>
図21は、車輪装置30が段差STを昇り上がる過程を図示した側面図である。以下に説明するように、車輪装置20は、段差STを昇り上がる場合、補助輪8が走行平面RPに接地して揺動アーム36が待機位置にあるときの走行体35の走行姿勢(以下「待機走行姿勢」という。)(図21(a)参照。)から、揺動アーム36が上昇揺動した状態にあるときの走行体35の走行姿勢(以下「上動走行姿勢」という。)(図21(b)参照。)へと変化する。
<Climbing the step of the wheel device>
FIG. 21 is a side view illustrating a process in which the
図21(a)に示すように、走行体35が待機走行姿勢をして、車輪装置30が段差壁面SWへ向かって走行平面RPを走行し、補助輪8が段差壁面SWに衝突し、その後、走行体35が走行姿勢で走行平面RPを前進すると、図21(b)に示す位置へ向かって、補助輪8が揺動アーム36に押されて段差壁面SWを上方へ向けて上昇転動し、この転動に伴って揺動アーム36が揺動軸36Aを中心に上方へ向かって揺動させられる。
As shown in FIG. 21A, the traveling
このとき、揺動アーム36は、補助輪8の段差壁面SWへの衝突によって先端部が相対的に後方(図21左側)へ押される外力を受ける格好となる。この外力は、揺動アーム36を揺動軸36Aを中心に上方へ向けて回転させる回転力となって、揺動アーム36を、図21(a)の位置(待機位置)から図21(b)の位置(上限位置)へ向けて上昇揺動させる。すると、この揺動アーム36の上昇揺動によって、走行体35は、補助輪8が走行平面RPから離間されて空中位置へ浮上した上動走行姿勢の状態となる。
At this time, the
その後、走行体35が更に前進し、補助輪8が更に上昇転動し、揺動アーム36が更に上昇揺動すると、図21(b)に示すように、揺動アーム36がストッパ機構10の上限ストッパ10Aにより上限位置で衝止される。
Thereafter, when the traveling
そして、この後、操作ハンドル92(図1参照。)を介して車輪装置30に前方上方へ引き上げる外力が加えられると、この引き上げに伴って自然と、図21(b)の位置から走行体35が更に前進されるとともに、補助輪8が更に上昇転動して、前輪3が段差下側の走行平面RPから浮き上がり、それから補助輪8が段差上側の走行平面RPに乗り上がり、前輪3及び後輪4が段差壁面SWから段差上側の走行平面RPに順に乗り上がると、この車輪装置30の段差越えが完了する。
After that, when an external force is applied to the
<第四実施例>
次に、図22から図26を参照して第四実施例の車輪装置40について説明する。
<Fourth embodiment>
Next, a
図22から図24は、第四実施例の車輪装置40の投影図であり、図22(a)は、車輪装置40の側面図であり、図22(b)は、図22(a)について、取付台座2、走行体45及び揺動アーム46の連結構造を示すため、便宜上、後述する車輪23,4,8を2点鎖線で図示したものである。図23は、車輪装置40の平面図であり、図24は、車輪装置40の正面図である。なお、図22において、「前方」(前側)とは、図中左側をいい、「後方」(後側)とは、図中右側をいう。
22 to 24 are projection views of the
<車輪装置>
第四実施例の車輪装置40は、上記した第二実施例の車輪装置20に対し、前補助輪及び後補助輪を排除し、支持輪を単一の補助輪とし、かかる変更に伴って、走行フレーム及び揺動アームの形状を変更したものである。
<Wheel device>
In the
なお、図示は省略するが、第四実施例の車輪装置40も、第二実施例の車輪装置20と同様、取付対象物であるキャリーカート90のカート荷台91の幅方向両側(図1(a)左右両側)にそれぞれ取り付けられて使用されるものである。
In addition, although illustration is abbreviate | omitted, the
ここで、図22に示すように走行体45の前輪23及び後輪4が走行平面RPに接地した姿勢状態を「走行姿勢」といい、この走行姿勢において、車体フレーム45A及び揺動アーム46の連結形態は、第二実施例の場合とは異なり、前輪23の車軸23Aの中心を通る垂直線L0に対し、非対称となっている。
Here, as shown in FIG. 22, a posture state in which the
図22から図24に示すように、車輪装置40は、取付台座2と、前輪23及び後輪4を有する走行体45と、揺動アーム46と、補助輪8と、ストッパ機構10とを備えている。
As shown in FIGS. 22 to 24, the
<取付台座>
取付台座2は、連結軸2Aを介して走行体45の車体フレーム45Aにおける前輪23及び後輪4の間に、前後方向へ相対的に揺動自在に連結されている。この連結軸2Aは、取付台座2に作用する荷重を車体フレーム45Aに伝達する。また、連結軸2Aは、走行体45の走行姿勢(図22に示す姿勢)において、その軸心高さh2が前輪23の車軸23Aの軸心高さh23と等しくなっている(図22(a)参照。)。
<Mounting base>
The mounting
取付台座2の回転中心P2は、前輪23及び後輪4の車軸間WB内(但し、前輪23及び後輪4の回転中心P3,P4を通って走行平面RPに直交する垂直線よりも内側の範囲をいう。)に設けられることが好ましく、本実施例では、車体フレーム45Aの前輪23及び後輪4の車軸間WBの中間点(中点)よりも僅かに前輪23側(前側部分)に設けられている。
The center of rotation P2 of the mounting
このため、取付台座2を介して車体フレーム45Aに作用する荷重全体のうち、その一部を後輪4に分配して作用させることができ、その分、前輪23側(前側部分)に作用する荷重を低減することができるので、走行体45の前側部分が段差を乗り越える際に浮き上がり易くなる。
For this reason, a part of the entire load acting on the
<走行体>
走行体45は、取付台座2に作用する荷重を直接支持するとともに、操作ハンドル92(図1参照。)を介して加えられる外力を受けて前輪23及び後輪4が転動して走行するものである。
<Running body>
The traveling
この走行体45の前輪23及び後輪4は、車体フレーム45Aに車軸23A,4Aを介して回動自在に軸支されている。前輪23は、その外径及び重量が後輪4と等しい同種の車輪である。
The
走行体45の車体フレーム45Aは、前輪23の車軸23Aの配設部から、取付台座2の連結軸2Aの配設部を経て、後輪4の車軸4Aの配設部まで、走行平面RPに対して平行に後方へ直線状に延出される基部45A1を備えている。この基部45A1の先端部には、前輪23の車軸23Aの配設部の直下から、走行平面RPに対して平行に前方へ直線状に延出される先部45A2が連設されている。
The
この車体フレーム45Aの先部45A2の前端部には、揺動アーム46が揺動軸26Aを介して揺動自在に連結されており、その基部45A1の後端部には、後輪4が車軸4Aを介して回動自在に軸支されている。
A
走行体45の前輪23及び後輪4、並びに、補助輪8は、いずれも同種の車輪であり、その車軸23A,4A,8Aの軸心高さh23,h4,h8がいずれも等しく、かつ、各車輪の外径がいずれも等しくなっている。また、これら軸心高さh23,h4,h8は、連結軸2Aの軸心高さh2とも等しくなっており、走行体45の走行姿勢において、取付台座2の回転中心P2と、前輪23の回転中心P3と、後輪4の回転中心P4と、補助輪8の回転中心P8とが、いずれも同じ高さ位置となるようになっている。
The
<揺動アーム>
揺動アーム46は、それとは別体に形成される走行体45の車体フレーム45Aの先部45A2の前端部に、揺動軸46Aを介して揺動自在に連結されており、この揺動軸46Aによる連結部から走行体45よりも更に前方上方へ向けて直線状に延出されている。
<Oscillating arm>
The
この揺動アーム46によれば、走行体45が走行姿勢で前進走行しながら、補助輪8が段差壁面に当接して上昇転動することによって、待機位置(図25(a)参照。)から上限位置(図25(b)参照。)へ向かって上昇揺動することができる。
According to the
ここで、揺動アーム46の待機位置とは、走行体45の走行姿勢(図22に示す姿勢)において、補助輪8の外周前端ef8が前輪23の外周前端ef23よりも前側となり、且つ、その補助輪8の回転中心P8が揺動アーム46の揺動中心P46よりも前方上方となる位置をいう(図22(a)参照。)。
Here, the standby position of the
この揺動アーム46の揺動軸46Aは、走行体45の車体フレーム45Aの先部45A2の前端部にあって、前輪23の車軸23Aよりも更に前方に位置しており、走行体45が走行姿勢である場合に、その軸心高さh46が、前輪23の車軸23A、後輪4の車軸4A、補助輪8及び連結軸2Aの軸心高さh23,h4,h8,h2よりも低くなるようになっている。
The swinging
また、揺動アーム46は、走行体45が走行姿勢で且つ補助輪8が走行平面RPに接地した状態で、ちょうど待機位置に存在するようになっており、この待機位置にある状態で、揺動軸46Aの配設部から走行体45よりも前方上方へ向けて所定角度(例えば20°程度)を成して傾斜した格好で直線状に延出されている。
The
<補助輪>
補助輪8は、揺動アーム46の先端部に車軸8Aを介して回動自在に軸支されている車輪である。この補助輪8の外径及びその車軸8Aの軸心高さh8は、走行体45の前輪23及び後輪4の外径及び軸心高さh23,h4と等しくなっている。
<Auxiliary wheel>
The
ここで、補助輪8は、走行体45の走行姿勢(図22に示す姿勢)において、次の(a)及び(b)のようになる。
Here, the
(a)補助輪8の外周前端ef8は、前輪23の外周前端ef23よりも前側となり、且つ、補助輪8は、走行平面RPに接地されて走行体45の前輪23及び後輪4とともに転動させられる(図22(a)参照。)。
(A) The outer peripheral front end ef8 of the
(b)補助輪8は、その補助輪8が走行平面RPと接地することによって、揺動アーム46を待機位置にて支持する(図22(a)参照。)。このため、走行体45の走行姿勢において、補助輪8の外周前端ef8が前輪23の外周前端ef23よりも前側となり、且つ、その補助輪8の回転中心P8が揺動アーム46の揺動中心P46よりも前方上方となる(図22(a)参照。)。
(B) The
このように補助輪8は、走行体5の走行姿勢において上記(a)及び(b)に示す状態で揺動アーム46を支持しているため、補助輪8の回転中心P8と揺動アーム46の揺動中心P46とを結ぶ軸間直線L1は、図22(b)に示すように、走行平面RPに対して前方上方へ所定の傾斜角(図25中の傾斜角φ1)を成すように傾斜するようになる。
As described above, since the
<ストッパ機構>
ストッパ機構10は、揺動アーム46を上限位置(図25参照。)で制止するため、上限位置で揺動アーム46を衝止する上限ストッパ10Aを有しており、この上限ストッパ10Aが車体フレーム45Aに配設固定されている。この上限ストッパ10Aは、揺動アーム46に衝止することで、その上限位置を越える上昇揺動を禁止している。
<Stopper mechanism>
The
また、ストッパ機構10は、揺動アーム46を下限位置(図25参照。)で制止するため、下限位置で揺動アーム46を衝止する下限ストッパ10Bを有しており、この下限ストッパ10Bが車体フレーム45Aに配設固定されている。この下限ストッパ10Bは、揺動アーム46に衝止することで、その下限位置を越える下降揺動を禁止している。
The
換言すれば、ストッパ機構10は、揺動アーム46が待機位置とそれより上方にある所定の上限位置との間で上昇揺動および下降揺動することを許容するとともに、揺動アーム46が待機位置とそれより下方にある所定の下限位置との間で上昇揺動および下降揺動することを許容している。
In other words, the
<揺動アームの揺動範囲>
図25は、揺動アーム46の揺動範囲を示した車輪装置40の側面図であり、揺動アーム46が上限位置にある状態と、揺動アーム46が下限位置にある状態とを、それぞれ図示したものである。
<Oscillation range of the oscillating arm>
FIG. 25 is a side view of the
図25に示すように、補助輪8(軸間直線L1)の揺動範囲θ1は、揺動アーム46を介したストッパ機構10の揺動制限によって、待機走行姿勢における揺動アーム46の軸間直線L1が走行平面RPに対して傾斜角φ1を成す待機位置から、上方に上限角αだけ揺動した上限位置(φ1+α)まで、その待機位置から下方に下限角βだけ揺動した下限位置(φ1−β)まで、という範囲(φ1−β≦θ1≦φ1+α)となる。
As shown in FIG. 25, the swing range θ1 of the auxiliary wheel 8 (straight axis L1) is the distance between the axes of the
例えば、傾斜角φ1が約20°、上限角αが約30°、下限角βが約135°である場合、補助輪8の揺動範囲θ1は、走行平面RP(傾斜角0°)に対する傾斜角20°の待機位置から更に上方に上限角約30°だけ揺動した上限位置(約50°)と、この待機位置から下方に下限角約135°だけ揺動した下限位置(約−90°)との間の範囲(概ね−115°≦θ1≦50°)となる。
For example, when the inclination angle φ1 is about 20 °, the upper limit angle α is about 30 °, and the lower limit angle β is about 135 °, the swing range θ1 of the
<車輪装置の段差を登る動作>
図26は、車輪装置40が段差STを昇り上がる過程を図示した側面図である。以下に説明するように、車輪装置40は、段差STを昇り上がる場合、補助輪8が走行平面RPに接地して揺動アーム46が待機位置にあるときの走行体45の走行姿勢(以下「待機走行姿勢」という。)(図26(a)参照。)から、揺動アーム46が上昇揺動した状態にあるときの走行体45の走行姿勢(以下「上動走行姿勢」という。)(図26(b)参照。)へと変化する。
<Climbing the step of the wheel device>
FIG. 26 is a side view illustrating a process in which the
図26(a)に示すように、走行体45が待機走行姿勢をして、車輪装置40が段差壁面SWへ向かって走行平面RPを走行し、補助輪8が段差壁面SWに衝突し、その後、走行体45が走行姿勢で走行平面RPを前進すると、図26(b)に示す位置へ向かって、補助輪8が揺動アーム46に押されて段差壁面SWを上方へ向けて上昇転動し、この転動に伴って揺動アーム46が揺動軸46Aを中心に上方へ向かって揺動させられる。
As shown in FIG. 26 (a), the traveling
このとき、揺動アーム46は、補助輪8の段差壁面SWへの衝突によって先端部が相対的に後方(図26左側)へ押される外力を受ける格好となる。この外力は、揺動アーム46を揺動軸46Aを中心に上方へ向けて回転させる回転力となって、揺動アーム46を、図26(a)の位置(待機位置)から図26(b)の位置(上限位置)へ向けて上昇揺動させる。すると、この揺動アーム46の上昇揺動によって、走行体45は、補助輪8が走行平面RPから離間されて空中位置へ浮上した上動走行姿勢の状態となる。
At this time, the
その後、走行体45が更に前進し、補助輪8が更に上昇転動し、揺動アーム46が更に上昇揺動すると、図26(b)に示すように、揺動アーム46がストッパ機構10の上限ストッパ10Aにより上限位置で衝止される。
Thereafter, when the traveling
そして、この後、操作ハンドル92(図1参照。)を介して車輪装置40に前方上方へ引き上げる外力が加えられると、この引き上げに伴って自然と、図26(b)の位置から走行体45が更に前進されるとともに、補助輪8が更に上昇転動して、前輪23が段差下側の走行平面RPから浮き上がり、それから補助輪8が段差上側の走行平面RPに乗り上がり、前輪23及び後輪4が段差壁面SWから段差上側の走行平面RPに順に乗り上がると、この車輪装置40の段差越えが完了する。
After that, when an external force that pulls forward upward is applied to the
<第五実施例>
次に、図27及び図28を参照して、第五実施例の車輪装置50について説明する。
<Fifth embodiment>
Next, with reference to FIG.27 and FIG.28, the
第五実施例の車輪装置50は、上記した第二実施例の車輪装置20に対し、支持輪を排除し、ストッパ機構のうち下降揺動を制限する下限ストッパを、揺動アームを待機位置で支持する支持機構として兼用したものである。つまり、揺動アームの支持機構は、ストッパ機構の下限ストッパによる制限位置を、揺動アームの下限位置を待機位置としたものである。
The
図27は、第五実施例の車輪装置50の走行姿勢を図示した側面図である。図27に示すように、ストッパ機構10は、揺動アーム26を上限位置(図28参照。)で制止するため、上限位置で揺動アーム26を衝止する上限ストッパ10Aを有しており、この上限ストッパ10Aが車体フレーム25Aに配設固定されている。この上限ストッパ10Aは、揺動アーム26に衝止することで、その上限位置を越える上昇揺動を禁止している。
FIG. 27 is a side view illustrating the traveling posture of the
また、ストッパ機構10は、揺動アーム26を待機位置(図28参照。)で制止するため、待機位置で揺動アーム26を衝止する下限ストッパ10Bを有しており、この下限ストッパ10Bが車体フレーム25Aに配設固定されている。この下限ストッパ10Bは、揺動アーム26に衝止することで、その待機位置を越える下降揺動を禁止するとともに、揺動アーム26を待機位置にて支持する支持機構51としても兼用される。
The
換言すれば、ストッパ機構10は、揺動アーム26が待機位置とそれより上方にある所定の上限位置との間で上昇揺動および下降揺動することを許容するとともに、支持機構51として、揺動アーム26を待機位置にて支持している。
In other words, the
図28は、揺動アーム26の揺動範囲を示した車輪装置50の側面図であり、揺動アーム26が上限位置にある状態と、揺動アーム26が下限位置にある状態とを、それぞれ図示したものである。
FIG. 28 is a side view of the
図28に示すように、前補助輪7(軸間直線L1)の揺動範囲θ1は、揺動アーム26介したストッパ機構10の揺動制限によって、待機走行姿勢における揺動アーム26の軸間直線L1が走行平面RPに対して傾斜角φ1を成す待機位置から、上方に上限角αだけ揺動した上限位置(φ1+α)までの範囲(φ1≦θ1≦φ1+α)となる。
As shown in FIG. 28, the swing range θ1 of the front auxiliary wheel 7 (the inter-shaft straight line L1) is set between the axes of the
例えば、傾斜角φ1が約15°、上限角αが約30°である場合、前補助輪7の揺動範囲θ1は、走行平面RP(傾斜角0°)に対する傾斜角約15°の待機位置から更に上方に上限角約30°だけ揺動した上限位置(約45°)までの範囲(概ね15°≦θ1≦45°)となる。
For example, when the inclination angle φ1 is about 15 ° and the upper limit angle α is about 30 °, the swing range θ1 of the front
このように第五実施例の車輪装置50によれば、第一実施例の第二補助輪8や第二実施例の支持輪8に代わって、ストッパ機構10が下限ストッパ10Bが揺動アーム26を待機位置で支持する支持機構51となるので、第一実施例の第二補助輪8や第二実施例の支持輪8を用いることなく前補助輪7を走行平面から離間した空中位置で支持することができる。
Thus, according to the
以上、実施例に基づき本発明を説明したが、本発明は上記実施例に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の改良変形が可能であることは容易に推察できるものである。 The present invention has been described based on the embodiments. However, the present invention is not limited to the above-described embodiments, and various improvements and modifications can be easily made without departing from the spirit of the present invention. It can be guessed.
例えば、上記第五実施例の車輪装置50は、第二実施例の車輪装置20から支持輪8を排除し、ストッパ機構10のうち下降揺動を制限する下限ストッパ10Bを、揺動アーム26を待機位置で支持する支持機構51として兼用したが、かかる変形例は、必ずしも第二実施例ベースのものに限定されず、例えば、第一実施例ベースのものであっても良い。
For example, the
例えば、第一実施例の車輪装置1から第二補助輪8を排除し、ストッパ機構のうち下降揺動を制限する下限ストッパを、揺動アーム6を待機位置で支持する支持機構として兼用しても良い。つまり、揺動アーム6の支持機構が、ストッパ機構の下限ストッパによる制限位置を、揺動アーム6の下限位置を待機位置としたものであっても良い。
For example, the second
また、各車輪の車軸、揺動アームの揺動軸、取付台座の連結軸は、各車輪、揺動アーム、取付台座に設けられる軸受を介して回動自在に軸支するようにしても良い。 Further, the axle of each wheel, the swinging shaft of the swinging arm, and the connecting shaft of the mounting base may be pivotally supported via a bearing provided on each wheel, swinging arm, and mounting base. .
1,20,30,40,50 車輪装置
2 取付台座
2A 連結軸
3,23 前輪
3A,23A 前輪の車軸
4 後輪
4A 後輪の車軸
5,25,35,45 走行体
5A,25A,35A,45A 車体フレーム
6,26,36,46 揺動アーム
6A,26A,36A,46A 揺動軸
7 第一補助輪・前補助輪(第1補助輪の車軸、補助輪の車軸)
7A 第一補助輪の車軸・前補助輪の車軸(第1補助輪の車軸、補助輪の車軸)
8 第二補助輪・支持輪(第2補助輪、補助輪、支持輪、支持機構)
8A 第二補助輪の車軸・支持輪の車軸(第2補助輪の車軸、補助輪の車軸、支持輪の車軸)
10A 上限ストッパ(ストッパ手段)
51 支持機構(支持機構)
90 キャリーカート(取付対象物)
92 操作ハンドル(操作部材)
93 把持部(操作部材の先端部)
ef3,ef23 前輪の外周前端
ef7 第一補助輪の外周前端・前補助輪の外周前端(第1補助輪の外周前端、補助輪の外周前端)
P6,P26,P36,P46 揺動アームの揺動中心
P7 第一補助輪の回転中心・前補助輪の回転中心(第1補助輪の回転中心、補助輪の回転中心)
RP 走行平面
SW 段差壁面
1, 20, 30, 40, 50
7A Axle of first auxiliary wheel / axle of front auxiliary wheel (axle of first auxiliary wheel, axle of auxiliary wheel)
8 Second auxiliary wheel, support wheel (second auxiliary wheel, auxiliary wheel, support wheel, support mechanism)
8A Axle of second auxiliary wheel / axle of support wheel (axle of second auxiliary wheel, axle of auxiliary wheel, axle of support wheel)
10A Upper limit stopper (stopper means)
51 Support mechanism (support mechanism)
90 Carry cart (object to be mounted)
92 Operation handle (operation member)
93 Gripping part (tip of the operating member)
ef3, ef23 Front outer periphery front end ef7 First auxiliary wheel outer periphery front end / front auxiliary wheel outer periphery front end (first auxiliary wheel outer periphery front end, auxiliary wheel outer periphery front end)
P6, P26, P36, P46 Swing center of swing arm P7 Rotation center of first auxiliary wheel / Rotation center of front auxiliary wheel (Rotation center of first auxiliary wheel, rotation center of auxiliary wheel)
RP Travel plane SW Step wall
Claims (6)
その取付台座に固定され当該取付台座側から上方に延設され先端部が使用者により引っ張られ又は押される操作部材と、
前記取付台座が前後方向へ相対的に揺動自在に連結軸を介して連結される車体フレームとその車体フレームに車軸を介して回動自在に軸支される前輪及び後輪とを有し、前記取付台座に作用する荷重を支持するとともに前記操作部材を介して作用する外力により前記前輪及び後輪が転動して走行する走行体と、
その走行体の車体フレームに揺動軸を介して揺動自在に連結され、且つ、その揺動軸から前記走行体の前方へ向けて延出される揺動アームと、
その揺動アームにおける延出部分の先端部に車軸を介して回動自在に軸支される補助輪と、
前記走行体の前輪及び後輪が走行平面に接地した走行姿勢において、前記補助輪の外周前端が前記前輪の外周前端よりも前側にあり且つその補助輪の回転中心が前記揺動アームの揺動中心よりも前方上方となるとともに、その補助輪の回転中心及び前記揺動アームの揺動中心を結ぶ軸間直線が走行平面に対して前方上方に傾斜した格好となる位置(以下「待機位置」という。)にて、前記揺動アームを支持する支持機構と、
その支持機構により前記待機位置で支持される前記揺動アームが、その待機位置とそれより上方にある上限位置との間で上昇揺動および下降揺動することを許容し、その揺動アームを前記上限位置で制止することにより当該上限位置を越える上昇揺動を禁止するストッパ手段とを備えており、
前記補助輪は、前記走行姿勢において、前記走行体が前進することによって、段差壁面に当接され、その段差壁面を上昇転動するものであり、
前記揺動アームは、前記走行姿勢において、前記補助輪が段差壁面を上昇転動することによって、前記待機位置から前記上限位置へ向かって上昇揺動するものであり、
前記走行体は、前記車体フレームに連結された前記取付台座に作用する取付対象物の荷重を支持することで、その車体フレームとは別体の前記揺動アームに取付対象物の荷重が作用することで当該揺動アームの上昇揺動が妨害されることを防止するものであり、
更に、
前記操作部材を引っ張る力によって走行姿勢の前記走行体が段差壁面へ向かって走行平面上で前進移動され、この前進移動によって進行方向最前部に軸支される前記補助輪が段差壁面に衝突当接され、この衝突当接に伴う外力が前記揺動アームに対して作用することで前記補助輪が段差壁面を上方へ向けて転動して上昇移動され、この転動によって前記揺動アームが待機位置から上限位置へ向かって上昇揺動され上限位置に到達することで前記ストッパ手段によって制止され、この制止状態で前記操作部材が上方に更に引っ張られることによって、前記走行体が前記取付台座の連結軸を中心として回転され、前記走行体の前側部分が走行平面から離反して浮き上がって段差越え姿勢となるものであることを特徴とする車輪装置。 A mounting base that is attached to the mounting object and supports the mounting object;
An operation member that is fixed to the mounting base and extends upward from the mounting base side, and the tip is pulled or pushed by the user;
The mounting base has a vehicle body frame that is connected via a connecting shaft so as to be relatively swingable in the front-rear direction, and a front wheel and a rear wheel that are rotatably supported by the vehicle body frame via an axle, A traveling body that supports the load acting on the mounting base and travels by rolling the front wheels and the rear wheels by an external force acting via the operation member;
A swing arm that is swingably connected to a vehicle body frame of the traveling body via a swing shaft, and extends from the swing shaft toward the front of the traveling body;
An auxiliary wheel that is pivotally supported via the axle at the tip of the extending portion of the swing arm;
In a traveling posture in which the front and rear wheels of the traveling body are in contact with a traveling plane, the outer peripheral front end of the auxiliary wheel is in front of the outer peripheral front end of the front wheel, and the rotation center of the auxiliary wheel is the swing of the swing arm. A position where the inter-axis straight line connecting the rotation center of the auxiliary wheel and the swing center of the swing arm is inclined forward and upward with respect to the travel plane (hereinafter referred to as “standby position”) A support mechanism for supporting the swing arm;
The swing arm supported at the standby position by the support mechanism is allowed to swing up and down between the standby position and an upper limit position above the standby position, and the swing arm Stopper means for prohibiting ascending and swinging beyond the upper limit position by stopping at the upper limit position,
In the traveling posture, the auxiliary wheel is brought into contact with the stepped wall surface when the traveling body moves forward, and rolls up the stepped wall surface.
The swing arm is in the running position, by the auxiliary wheel is increased rolling step wall state, and are not raised swung toward the upper limit position from the standby position,
The traveling body supports the load of the mounting object acting on the mounting base connected to the vehicle body frame, so that the load of the mounting object acts on the swing arm separate from the vehicle body frame. This prevents the swinging movement of the swinging arm from being obstructed,
Furthermore,
Due to the pulling force of the operation member, the traveling body in the traveling posture is moved forward on the traveling plane toward the stepped wall surface, and the auxiliary wheel that is pivotally supported at the foremost part in the traveling direction by this forward movement collides against the stepped wall surface When the external force accompanying the collision contact acts on the swing arm, the auxiliary wheel rolls upward with the stepped wall surface upward, and the swing arm is put on standby by this rolling. When it is swung upward from the position toward the upper limit position and reaches the upper limit position, it is restrained by the stopper means, and the operating member is further pulled upward in this restrained state, so that the traveling body is connected to the mounting base. is rotated about an axis, the traveling body wheel device, characterized in der Rukoto made a step beyond attitude lifted the front portion is away from the running plane of the.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013259184A JP5991959B2 (en) | 2013-12-16 | 2013-12-16 | Wheel equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013259184A JP5991959B2 (en) | 2013-12-16 | 2013-12-16 | Wheel equipment |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012199062A Division JP5490195B2 (en) | 2012-09-11 | 2012-09-11 | Wheel equipment |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014054988A JP2014054988A (en) | 2014-03-27 |
| JP2014054988A5 JP2014054988A5 (en) | 2015-10-08 |
| JP5991959B2 true JP5991959B2 (en) | 2016-09-14 |
Family
ID=50612682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013259184A Active JP5991959B2 (en) | 2013-12-16 | 2013-12-16 | Wheel equipment |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5991959B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018034708A (en) * | 2016-09-01 | 2018-03-08 | 直治 長通 | Transport vehicle for work |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0223499Y2 (en) * | 1986-08-08 | 1990-06-26 | ||
| JPH1024851A (en) * | 1996-07-10 | 1998-01-27 | Hisatoho Oogawara | Vehicle |
| JP2004203185A (en) * | 2002-12-25 | 2004-07-22 | Yoshitaka Kasahara | Stair ascendable/descendable vehicle |
| JP4071785B2 (en) * | 2004-09-09 | 2008-04-02 | 岡本 耕一 | Escalator cart |
| JP4130674B2 (en) * | 2005-10-31 | 2008-08-06 | 耕一 岡本 | Escalator cart |
| JP2008154840A (en) * | 2006-12-25 | 2008-07-10 | Nakahara Sekkei Jimusho:Kk | Stair-climbing electric wheelchair |
| FR2956087B1 (en) * | 2010-02-05 | 2012-12-28 | New Live | OBSTACLE CROSSING DEVICE FOR ELECTRICAL WHEELCHAIR. |
-
2013
- 2013-12-16 JP JP2013259184A patent/JP5991959B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014054988A (en) | 2014-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5490195B2 (en) | Wheel equipment | |
| US7866430B2 (en) | Vehicle with two parallel wheels | |
| US20180354575A1 (en) | Powered unicycle with handle | |
| JP6214943B2 (en) | baby carriage | |
| US20180215434A1 (en) | Central wheel structure auto-balancing device | |
| JP2007008418A (en) | Folding two-wheeler and cover therefor | |
| US20190047653A1 (en) | Deployable foot platform personal transportation device | |
| JP5991959B2 (en) | Wheel equipment | |
| JP4391510B2 (en) | Caster and shock axle support mechanism | |
| JP3138872U (en) | Structure of the fall prevention stand used when the motorcycle is stationary | |
| JP3181089U (en) | wheelchair | |
| JP6484163B2 (en) | Folding vehicle | |
| CN204223096U (en) | A kind of combination wheel carrier of the folding vehicle | |
| JP3154114U (en) | Bicycle stand upright manual operation device | |
| WO2020194947A1 (en) | Windshield device for saddle-type vehicle | |
| JP2010280367A (en) | Bicycle | |
| JP2016007887A (en) | Handcart | |
| CN101247980A (en) | Vehicle with variable wheel camber | |
| WO2011099194A1 (en) | Wheelchair transporting device | |
| CN211494350U (en) | Combined riding carrying vehicle pulled by self-balancing vehicle | |
| JP6338231B1 (en) | bicycle | |
| JP5126921B1 (en) | bicycle | |
| JP2014054988A5 (en) | ||
| CN111845907A (en) | Stair-climbing and flat-ground dual-purpose cart with Watt-shaped six-connecting-rod swinging type connecting rod wheel mechanism | |
| JP2006056493A (en) | Two front-wheel bicycle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20131219 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150825 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160802 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160816 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5991959 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |