JP5907755B2 - 画像位置合わせ装置及び画像位置合わせ方法 - Google Patents
画像位置合わせ装置及び画像位置合わせ方法 Download PDFInfo
- Publication number
- JP5907755B2 JP5907755B2 JP2012038699A JP2012038699A JP5907755B2 JP 5907755 B2 JP5907755 B2 JP 5907755B2 JP 2012038699 A JP2012038699 A JP 2012038699A JP 2012038699 A JP2012038699 A JP 2012038699A JP 5907755 B2 JP5907755 B2 JP 5907755B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- block
- amount
- positional deviation
- feature
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Landscapes
- Image Processing (AREA)
- Image Analysis (AREA)
Description
近年では、画像のエッジ情報を用いて、マッチング処理を実施することで、2つの画像間の位置ずれ量を算出する方法も提案されている。
また、以下の特許文献2には、画像を小領域に分割して、小領域の分散やエッジ量を求め、その分散やエッジ量を用いて、マッチング処理を実施して、レジストレーションする方法が記載されている。
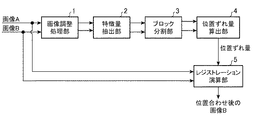
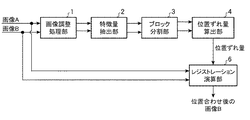
図1はこの発明の実施の形態1による画像位置合わせ装置を示す構成図である。
図1において、画像調整処理部1は画像A(第1の画像)を示す画像データと、画像B(第2の画像)を示す画像データを入力すると、後段の特徴量抽出部2における特徴量抽出処理の容易化を図るための前処理として、画像A及び画像Bに対する画像調整処理(例えば、ヒストグラム補正処理、画像の周波数調整処理など)を実施する。なお、画像調整処理部1は画像調整処理手段を構成している。
ブロック分割部3は画像A及び画像Bを複数のブロックに分割する処理を実施する。なお、ブロック分割部3はブロック分割手段を構成している。
即ち、位置ずれ量算出部4は画像Aのブロックに対応する画像Bのブロックを画素単位に移動しながら、対応関係があるブロック間の相関値を算出し、その相関値が最高になるブロックの移動位置から、対応関係があるブロック間の位置ずれ量を算出する。
なお、位置ずれ量算出部4は位置ずれ量算出手段を構成している。
即ち、レジストレーション演算部5は位置ずれ量算出部4により算出されたブロック毎の位置ずれ量のうち、算出元である特徴量の種類が同じであるブロック単位の位置ずれ量から画像単位の位置ずれ量をそれぞれ算出し、複数の画像単位の位置ずれ量の中の1つの位置ずれ量を用いて、画像Aと画像Bのレジストレーションを実施する。
なお、レジストレーション演算部5は位置合わせ手段を構成している。
画像位置合わせ装置がコンピュータで構成されている場合、画像調整処理部1、特徴量抽出部2、ブロック分割部3、位置ずれ量算出部4及びレジストレーション演算部5の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
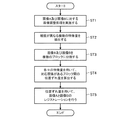
図2はこの発明の実施の形態1による画像位置合わせ装置の処理内容(画像位置合わせ方法)を示すフローチャートである。
画像調整処理部1は、画像Aを示す画像データと、画像Bを示す画像データとを入力すると、特徴量抽出部2における特徴量抽出処理の容易化を図るための前処理として、画像A及び画像Bに対する画像調整処理を実施する(ステップST1)。
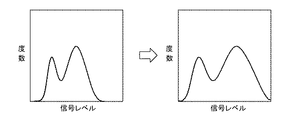
即ち、画像調整処理部1は、画像A及び画像Bを構成している各画素の信号レベルのヒストグラムをとり、例えば、画像のレベル補正、平坦化、コントラスト補正や周波数調整などを行う。
画像のレベル補正は、例えば、画像A(画像B)を構成している各画素の信号レベルiの中で、最大の信号レベルがimaxであるとき、最大の信号レベルimaxが、入力画像を構成する画素の信号が取り得る最大値Smaxに満たない場合(imax<Smax)、画像A(画像B)を構成している全ての画素の信号レベルiをSmax/imax倍して、画像A(画像B)における信号最大値imaxが、信号が取り得る最大値Smaxと一致するように調整するものである。
なお、入力画像が8bit画像の場合、入力画像を構成する画素の信号が取り得る最大値Smaxは255である。
画像の平坦化を行う場合、一般的には、下記の式(1)が適用される。

式(1)において、iは画像A(画像B)を構成している各画素の信号レベルであり、hist(i)は信号レベルiのヒストグラムを求める関数、Hは画像A(画像B)の縦サイズ、Wは画像A(画像B)の横サイズである。
そこで、このような現象を避けるために、重み付けを施したヒストグラムの平坦化を行うようにしてもよい。
下記の式(2)は重み付けを施したヒストグラムの平坦化の式を示している。
式(2)において、LUT(i)はヒストグラムのレベルに応じた重み付け係数であり、総和が1となるように設定されている。
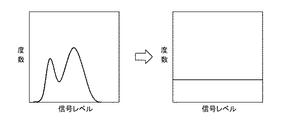
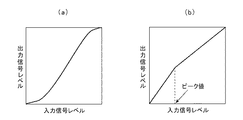
画像のコントラスト補正では、単純にコントラストを強めたり、コントラストを弱めたりすることもできるが、次のような処理を行うようにしてもよい。
例えば、画像A(画像B)のヒストグラムのピーク値を求め、そのピーク値が所定の値(例えば、入力画像を構成する画素の信号が取り得る最大値の半分の値)より小さい場合と、そのピーク値が所定の値より大きい場合とで、異なるレベル伸張を行うようにしてもよい。
画像の周波数調整は、画像Aと画像Bの解像度が異なる場合、両方の解像度を合わせるために解像度の高い方の画像に対して、低周波カット処理を行うものである。
周波数調整の処理としては、n×nのローパスフィルタ処理を行うようにしてもよいし、フーリエ変換(FFT)による低周波カット処理を行うようにしてもよい。
特徴量の抽出処理としては、例えば、画像のエッジを特徴量として抽出する処理や、画像の特徴点(例えば、コーナー点、強度の極大点・極小点、曲線の終点、曲率の極大点、孤立点など)を特徴量として抽出する処理などが想定される。
一般的なエッジ抽出方法として、n×nのSobelフィルタを用いる方法がある。
n×nのSobelフィルタを用いて、エッジを抽出する際の演算式は、下記の式(3)のように表される。
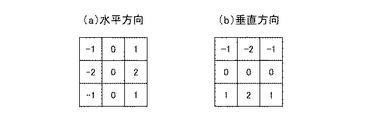
式(3)において、fx(x,y)は注目画素(x,y)に対する水平方向のフィルタ演算を行う関数を示し、fy(x,y)は注目画素(x,y)に対する垂直方向のフィルタ演算を行う関数を示している。
また、fx(x,y)、fy(x,y)には、画像調整処理部1による調整処理後の信号レベルが代入される。
f’(x,y)は注目画素(x,y)におけるエッジの検出結果を示し、その検出結果が8ビットで表される場合、注目画素(x,y)にエッジがなければ0の値、注目画素(x,y)にエッジがあれば255などの値になる。
例えば、3×3のSobelフィルタ場合、水平垂直方向のフィルタ係数は図6のように表される。
Cannyフィルタを用いる場合、注目画素の8近傍(4方向)に対する勾配が求められ、最も強い勾配を持つ方向にエッジが接続される。このため、抽出されるエッジは、細線化されてノイズが少ないものとなる。
なお、エッジの検出結果は、注目画素がエッジであるか否かを示す2値で表される。
Laplacianフィルタを用いる場合、x−y両方向の二次微分の和が計算されてエッジが抽出される。
Laplacianフィルタを用いて、エッジを抽出する際の演算式は、下記の式(4)のように表される。
式(4)において、δは微分を示す演算記号である。
Laplacianフィルタは、2次微分フィルタであるため細かくエッジを抽出することができる。
特徴点の抽出処理の一般的な抽出方法として、コーナー検出方法がある。
コーナー検出方法では、いわゆるコーナー点だけでなく、強度の極大点・極小点、曲線の終点、曲率の極大点、孤立点などを特徴点として検出することができる。
一般的なコーナー検出方法として、「Moravec」と呼ばれるコーナー検出アルゴリズムがあり、その演算式は、下記の式(5)のように表される。
式(5)において、f(x,y)は注目画素(x,y)の信号レベル(例えば、輝度値)に相当し、画像調整処理部1による調整処理後の信号レベルである。
f(x+i,y+j)は注目画素(x,y)の周辺画素(x+i,y+j)の信号レベルに相当し、画像調整処理部1による調整処理後の信号レベルである。
また、Movacは注目画素(x,y)のコーナー点らしさを評価する値である。
「SUZAN」と呼ばれるコーナー検出アルゴリズムは、「Moravec」の欠点が改良されているコーナー検出アルゴリズムであり、「SUZAN」を用いるようにしてもよい。
SUZANは、輝度値が不連続に変化する凸領域の曲率が大きい頂点を探索する手法である。
下記の式(6)は、「SUZAN」と呼ばれるコーナー検出アルゴリズムの演算式を示している。
式(6)において、f(x,y)は注目画素(x,y)の信号レベル(例えば、輝度値)に相当し、画像調整処理部1による調整処理後の信号レベルである。
f’(x’,y’)は注目画素(x,y)の周辺画素(x’,y’)の信号レベルに相当する。
また、Mx,yは注目画素(x,y)を中心とするある近傍領域であり、tは予め設定された閾値である
式(6)では、ある近傍領域内の中心画素と輝度値の差が小さい画素の数を数えており、その極小点を特徴点としている。
ここでは、特徴量抽出部2が、画像調整処理部1から出力された調整処理後の画像A及び画像Bから種類が異なる複数の特徴量を抽出して、種類が異なる複数の特徴量を位置ずれ量算出部4に出力するものを示しているが、画像調整処理部1から出力された調整処理後の画像A及び画像B自体を特徴量として位置ずれ量算出部4に出力するようにしてもよい。
即ち、画像調整処理部1から出力された調整処理後の画像A及び画像Bは、画像の濃淡を表しているので、その濃淡自体が画像の特徴量であると捉え、調整処理後の画像A及び画像Bから特に特徴量を抽出する処理を行わず、画像A及び画像Bをそのまま位置ずれ量算出部4に出力するようにしてもよい。
位置ずれ量算出部4は、ブロック分割部3が画像A及び画像BをG×Hのブロックに分割すると、特徴量抽出部2により抽出された各々の特徴量を用いて、ブロック分割部3により分割された画像Aのブロックと画像Bのブロックの中で、対応関係があるブロック間の位置ずれ量を算出する(ステップST4)。
特徴量抽出部2により抽出された特徴量が、例えば、コーナー点とエッジと濃淡値の3種類であれば、コーナー点(特徴量)を用いて、対応関係があるブロック間の位置ずれ量を算出するとともに、エッジ(特徴量)を用いて、対応関係があるブロック間の位置ずれ量を算出する。
また、濃淡値(特徴量)を用いて、対応関係があるブロック間の位置ずれ量を算出する。
画像A及び画像BがG×Hのブロックに分割された場合、ブロック数はG×H個ずつあり、画像Aのブロックを(g,h)ブロックA、画像Bのブロックを(g,h)ブロックBと表記する。ただし、g=0,1,・・・,G−1、h=0,1,・・・,H−1である。
この場合、画像Aと画像Bにおいて、対応関係があるブロックは、(g,h)ブロックAと(g,h)ブロックBである。
即ち、位置ずれ量算出部4は、最初に、(g,h)ブロックAと(g,h)ブロックBとの相関値を算出する。相関値の算出方法は後述する。
次に、(g,h)ブロックBを構成している各画素を1画素ずつX方向又は水平方向に移動し、(g,h)ブロックAと移動後の(g,h)ブロックBとの相関値を算出する。
位置ずれ量算出部4は、(g,h)ブロックBの画素単位の移動処理と、(g,h)ブロックAと移動後の(g,h)ブロックBとの相関値を算出する処理とを繰り返し実施する。
上記の繰り返し処理は、(g,h)ブロックBの画素単位の移動を、X軸方向に予め設定された画素分だけ移動するとともに、Y軸方向に予め設定された画素分だけ移動して、相関値の算出処理が完了するまで行われる。
ここでは、(g,h)ブロックBを画素単位に移動している例を示しているが、(g,h)ブロックAを画素単位に移動するようにしてもよい。
例えば、最高の相関値が算出された際の(g,h)ブロックBの移動位置が(g,h)ブロックBの元の位置から、X軸方向にx1画素だけ移動され、Y軸方向にy1画素だけ移動されたものであれば、(g,h)ブロックAと(g,h)ブロックBの位置ずれ量は、(x1,y1)のように算出される。
T(j,i)は(g,h)ブロックBを構成している各画素の特徴量、Tバーは(g,h)ブロックBを構成している全画素の特徴量の平均値である。
また、Nは(g,h)ブロックA,BにおけるX軸方向の画素の数、Mは(g,h)ブロックA,BにおけるY軸方向の画素の数である。
NCCは(g,h)ブロックAと(g,h)ブロックBの正規相互相関値である。
なお、正規相互相関値NCCは、2つの画像の濃淡が異なる場合でも安定して相関値を演算することができるが、2つのブロック間の相関値が求まれば、相関値の算出は、式(7)の演算に限るものではない。
以下、レジストレーション演算部5による画像Aと画像Bのレジストレーションを具体的に説明する。
特徴量抽出部2により抽出された特徴量が、例えば、コーナー点と濃淡値の2種類であれば、コーナー点(特徴量)を用いて算出された(g,h)ブロックAと(g,h)ブロックBの位置ずれ量から画像単位の位置ずれ量を算出し、濃淡値(特徴量)を用いて算出された(g,h)ブロックAと(g,h)ブロックBの位置ずれ量から画像単位の位置ずれ量を算出する。
画像A及び画像BがG×Hのブロックに分割された場合、ブロック数がG×H個ずつあるので、特徴量の種類毎に、ブロック単位の位置ずれ量((g,h)ブロックAと(g,h)ブロックBの位置ずれ量)がG×H個算出される。このため、ブロック単位の位置ずれ量から画像単位の位置ずれ量を算出する方法としては、特徴量の種類毎に、G×H個のブロック単位の位置ずれ量の平均値や中央値などを、画像単位の位置ずれ量として算出する方法などが考えられる。
例えば、各々の特徴量を用いて算出された相関値を比較し、相関値が高い方の特徴量を用いて算出された位置ずれ量を選択する方法などが考えられる。
具体的には、特徴量抽出部2により抽出された特徴量が、例えば、エッジと濃淡値の2種類であれば、画像A,Bに存在しているエッジの数が所定の閾値より多い場合、エッジ(特徴量)を用いて算出された位置ずれ量を選択し、画像A,Bに存在しているエッジの数が所定の閾値より少ない場合、濃淡値(特徴量)を用いて算出された位置ずれ量を選択する。
なお、画像A,Bに存在しているエッジの数は、例えば、全ブロックにおけるエッジ(特徴量)を示す信号値の総和としてもよい。
レジストレーション演算部5は、アフィン変換の変換係数を算出すると、その変換係数を画像Bに乗じることで、画像Bの位置を画像Aの位置に合わせるレジストレーションを実施する。
レジストレーション演算部5は、位置合わせ後の画像Bを示す画像データを出力する。
即ち、画像A及び画像Bから種類が異なる複数の特徴量を抽出して、各々の特徴量を用いて位置ずれ量を算出し、複数の位置ずれ量の中から、適応的に1つの位置ずれ量を選択するようにしているので、画像の特徴に見合う高精度なレジストレーションを実施することができる。
上記実施の形態1では、レジストレーション演算部5が、算出元である特徴量の種類が同じであるブロック単位の位置ずれ量から画像単位の位置ずれ量をそれぞれ算出して、複数の画像単位の位置ずれ量の中から、1つの位置ずれ量を選択し、1つの位置ずれ量を用いて、画像Aと画像Bの位置合わせを行うものを示したが、各々の特徴量を用いて算出されたブロック間の位置ずれ量の中から、ブロック単位に1つの位置ずれ量を選択して、その選択したブロック単位の位置ずれ量から画像単位の位置ずれ量を算出し、画像単位の位置ずれ量を用いて、画像Aと画像Bの位置合わせを行うようにしてもよい。
レジストレーション演算部6は図1のレジストレーション演算部5と同様に、位置ずれ量算出部4により各々の特徴量を用いて算出されたブロック間の位置ずれ量を用いて、画像Aと画像Bのレジストレーションを実施する。
ただし、レジストレーション演算部6は図1のレジストレーション演算部5と異なり、位置ずれ量算出部4により各々の特徴量を用いて算出されたブロック間の位置ずれ量の中から、ブロック単位に1つの位置ずれ量を選択し、その選択したブロック単位の位置ずれ量から画像単位の位置ずれ量を算出し、画像単位の位置ずれ量を用いて、画像Aと画像Bのレジストレーションを実施する。
なお、レジストレーション演算部6は位置合わせ手段を構成している。
画像位置合わせ装置がコンピュータで構成されている場合、画像調整処理部1、特徴量抽出部2、ブロック分割部3、位置ずれ量算出部4及びレジストレーション演算部6の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
上記実施の形態1と比べて、レジストレーション演算部6がレジストレーション演算部5の代わりに搭載されている点以外は同じであるため、ここでは、レジストレーション演算部6以外の処理内容は割愛する。
以下、レジストレーション演算部6による画像Aと画像Bのレジストレーションを具体的に説明する。
特徴量抽出部2により抽出された特徴量が、例えば、コーナー点と濃淡値の2種類であれば、コーナー点(特徴量)を用いて算出された(g,h)ブロックAと(g,h)ブロックBの位置ずれ量と、濃淡値(特徴量)を用いて算出された(g,h)ブロックAと(g,h)ブロックBの位置ずれ量との中から、1つの位置ずれ量を選択する。
例えば、各々の特徴量を用いて算出された相関値を比較し、相関値が高い方の特徴量を用いて算出された位置ずれ量を選択する方法などが考えられる。
具体的には、特徴量抽出部2により抽出された特徴量が、例えば、エッジと濃淡値の2種類であれば、(g,h)ブロックA,Bに存在しているエッジの数が所定の閾値より多い場合、エッジ(特徴量)を用いて算出された位置ずれ量を選択し、(g,h)ブロックA,Bに存在しているエッジの数が所定の閾値より少ない場合、濃淡値(特徴量)を用いて算出された位置ずれ量を選択する。
また、複数の位置ずれ量の中で、最も小さい位置ずれ量を選択するようにしてもよい。
なお、対応するブロック毎に、1つの位置ずれ量を選択する方式の場合、画像A及び画像BがG×Hのブロックに分割されていれば、ブロック数がG×H個ずつあるので、全部でG×H個の位置ずれ量が選択されることになる。
ブロック単位の位置ずれ量から画像単位の位置ずれ量を算出する方法としては、G×H個の位置ずれ量の平均値や中央値などを、画像単位の位置ずれ量として算出する方法などが考えられる。
レジストレーション演算部6は、アフィン変換の変換係数を算出すると、その変換係数を画像Bに乗じることで、画像Bの位置を画像Aの位置に合わせるレジストレーションを実施する。
レジストレーション演算部6は、位置合わせ後の画像Bを示す画像データを出力する。
Claims (6)
- 第1の画像及び第2の画像から種類が異なる複数の特徴量を抽出する特徴量抽出手段と、上記第1の画像及び上記第2の画像を複数のブロックに分割するブロック分割手段と、上記特徴量抽出手段により抽出された各々の特徴量を用いて、上記ブロック分割手段により分割された第1の画像のブロックと第2の画像のブロックの中で、対応関係があるブロック間の位置ずれ量を算出する位置ずれ量算出手段と、上記位置ずれ量算出手段により算出されたブロック毎の位置ずれ量のうち、算出元である特徴量の種類が同じであるブロック単位の位置ずれ量から画像単位の位置ずれ量をそれぞれ算出し、複数の画像単位の位置ずれ量の中の1つの位置ずれ量を用いて、上記第1の画像と上記第2の画像の位置合わせを行う位置合わせ手段と備えた画像位置合わせ装置。
- 第1の画像及び第2の画像から種類が異なる複数の特徴量を抽出する特徴量抽出手段と、上記第1の画像及び上記第2の画像を複数のブロックに分割するブロック分割手段と、上記特徴量抽出手段により抽出された各々の特徴量を用いて、上記ブロック分割手段により分割された第1の画像のブロックと第2の画像のブロックの中で、対応関係があるブロック間の位置ずれ量を算出する位置ずれ量算出手段と、上記位置ずれ量算出手段により各々の特徴量を用いて算出されたブロック間の位置ずれ量の中から、ブロック単位に1つの位置ずれ量を選択し、その選択したブロック単位の位置ずれ量から画像単位の位置ずれ量を算出し、上記画像単位の位置ずれ量を用いて、上記第1の画像と上記第2の画像の位置合わせを行う位置合わせ手段とを備えた画像位置合わせ装置。
- 上記位置ずれ量算出手段は、上記第1の画像のブロックに対応する上記第2の画像のブロックを画素単位に移動しながら、対応関係があるブロック間の相関値を算出し、その相関値が最高になるブロックの移動位置から、対応関係があるブロック間の位置ずれ量を算出することを特徴とする請求項1または請求項2記載の画像位置合わせ装置。
- 上記第1の画像及び上記第2の画像に対する画像調整処理を実施し、調整処理後の第1の画像及び第2の画像を上記特徴量抽出手段に出力する画像調整処理手段を設けたことを特徴とする請求項1から請求項3のうちのいずれか1項記載の画像位置合わせ装置。
- 特徴量抽出手段が、第1の画像及び第2の画像から種類が異なる複数の特徴量を抽出する特徴量抽出処理ステップと、ブロック分割手段が、上記第1の画像及び上記第2の画像を複数のブロックに分割するブロック分割処理ステップと、位置ずれ量算出手段が、上記特徴量抽出処理ステップで抽出された各々の特徴量を用いて、上記ブロック分割処理ステップで分割された第1の画像のブロックと第2の画像のブロックの中で、対応関係があるブロック間の位置ずれ量を算出する位置ずれ量算出処理ステップと、位置合わせ手段が、上記位置ずれ量算出処理ステップで算出されたブロック毎の位置ずれ量のうち、算出元である特徴量の種類が同じであるブロック単位の位置ずれ量から画像単位の位置ずれ量をそれぞれ算出し、複数の画像単位の位置ずれ量の中の1つの位置ずれ量を用いて、上記第1の画像と上記第2の画像の位置合わせを行う位置合わせ処理ステップとを備えた画像位置合わせ方法。
- 特徴量抽出手段が、第1の画像及び第2の画像から種類が異なる複数の特徴量を抽出する特徴量抽出処理ステップと、ブロック分割手段が、上記第1の画像及び上記第2の画像を複数のブロックに分割するブロック分割処理ステップと、位置ずれ量算出手段が、上記特徴量抽出処理ステップで抽出された各々の特徴量を用いて、上記ブロック分割処理ステップで分割された第1の画像のブロックと第2の画像のブロックの中で、対応関係があるブロック間の位置ずれ量を算出する位置ずれ量算出処理ステップと、位置合わせ手段が、上記位置ずれ量算出処理ステップで各々の特徴量を用いて算出されたブロック間の位置ずれ量の中から、ブロック単位に1つの位置ずれ量を選択し、その選択したブロック単位の位置ずれ量から画像単位の位置ずれ量を算出し、上記画像単位の位置ずれ量を用いて、上記第1の画像と上記第2の画像の位置合わせを行う位置合わせ処理ステップとを備えた画像位置合わせ方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012038699A JP5907755B2 (ja) | 2012-02-24 | 2012-02-24 | 画像位置合わせ装置及び画像位置合わせ方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012038699A JP5907755B2 (ja) | 2012-02-24 | 2012-02-24 | 画像位置合わせ装置及び画像位置合わせ方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013175023A JP2013175023A (ja) | 2013-09-05 |
| JP5907755B2 true JP5907755B2 (ja) | 2016-04-26 |
Family
ID=49267876
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012038699A Active JP5907755B2 (ja) | 2012-02-24 | 2012-02-24 | 画像位置合わせ装置及び画像位置合わせ方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5907755B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10013764B2 (en) * | 2014-06-19 | 2018-07-03 | Qualcomm Incorporated | Local adaptive histogram equalization |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2897772B1 (ja) * | 1998-06-01 | 1999-05-31 | 日本電気株式会社 | 画像位置合わせ方法、画像位置合わせ装置及び記録媒体 |
| JPH11242737A (ja) * | 1998-02-26 | 1999-09-07 | Ricoh Co Ltd | 画像処理方法及び装置並びに情報記録媒体 |
| JP4595733B2 (ja) * | 2005-08-02 | 2010-12-08 | カシオ計算機株式会社 | 画像処理装置 |
-
2012
- 2012-02-24 JP JP2012038699A patent/JP5907755B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013175023A (ja) | 2013-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6115781B2 (ja) | 画像処理装置及び画像処理方法 | |
| Lin et al. | Image enhancement using the averaging histogram equalization (AVHEQ) approach for contrast improvement and brightness preservation | |
| US10726539B2 (en) | Image processing apparatus, image processing method and storage medium | |
| CN111260543B (zh) | 一种基于多尺度图像融合和sift特征的水下图像拼接方法 | |
| JP5082637B2 (ja) | 画像処理プログラム、画像処理方法及び画像処理装置 | |
| US8090214B2 (en) | Method for automatic detection and correction of halo artifacts in images | |
| CN105976328B (zh) | 图像噪声降低 | |
| US6640008B1 (en) | Rotation and scale invariant pattern matching method | |
| TWI538506B (zh) | 影像處理裝置、資訊處理方法及電腦可讀取儲存媒體 | |
| CN105976327B (zh) | 对第一图像进行变换的方法、处理模块和存储介质 | |
| KR20150116833A (ko) | 에지-보존 잡음 억제 기능을 갖는 이미지 프로세서 | |
| JP2018518735A (ja) | カラーキャリブレーション装置及び方法 | |
| CN108596878A (zh) | 图像清晰度评价方法 | |
| CN109214996B (zh) | 一种图像处理方法及装置 | |
| JP2012208553A (ja) | 画像処理装置、および画像処理方法、並びにプログラム | |
| JPWO2008102898A1 (ja) | 画質改善処理装置、画質改善処理方法及び画質改善処理プログラム | |
| JP2015062270A (ja) | 画像処理装置 | |
| WO2016051716A1 (ja) | 画像処理方法、画像処理装置、及び画像処理プログラムを記憶する記録媒体 | |
| JP2019106173A (ja) | 画像処理方法、画像処理装置およびプログラム | |
| JP5907755B2 (ja) | 画像位置合わせ装置及び画像位置合わせ方法 | |
| JP2016032265A (ja) | 画像処理装置 | |
| US8971627B2 (en) | Template matching processing device and template matching processing program | |
| CN108564534A (zh) | 一种基于检索的图像对比度调整方法 | |
| CN102158730B (zh) | 影像处理系统及方法 | |
| Min et al. | Out-of-focus image deblurring for mobile display vision inspection |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141104 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150708 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150714 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150910 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160223 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160322 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5907755 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |