JP5885654B2 - Train control system - Google Patents
Train control system Download PDFInfo
- Publication number
- JP5885654B2 JP5885654B2 JP2012287515A JP2012287515A JP5885654B2 JP 5885654 B2 JP5885654 B2 JP 5885654B2 JP 2012287515 A JP2012287515 A JP 2012287515A JP 2012287515 A JP2012287515 A JP 2012287515A JP 5885654 B2 JP5885654 B2 JP 5885654B2
- Authority
- JP
- Japan
- Prior art keywords
- train
- wireless communication
- ground
- setting section
- stop
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004891 communication Methods 0.000 claims description 165
- 238000011144 upstream manufacturing Methods 0.000 claims description 12
- 238000010586 diagram Methods 0.000 description 20
- 230000008859 change Effects 0.000 description 11
- 238000012937 correction Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 230000005856 abnormality Effects 0.000 description 4
- 230000000007 visual effect Effects 0.000 description 3
- 230000010365 information processing Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000007306 turnover Effects 0.000 description 1
Images


























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or trains or setting of track apparatus
- B61L25/02—Indicating or recording positions or identities of vehicles or trains
- B61L25/025—Absolute localisation, e.g. providing geodetic coordinates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0018—Communication with or on the vehicle or train
- B61L15/0027—Radio-based, e.g. using GSM-R
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/08—Control, warning or like safety means along the route or between vehicles or trains for controlling traffic in one direction only
- B61L23/14—Control, warning or like safety means along the route or between vehicles or trains for controlling traffic in one direction only automatically operated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/08—Control, warning or like safety means along the route or between vehicles or trains for controlling traffic in one direction only
- B61L23/14—Control, warning or like safety means along the route or between vehicles or trains for controlling traffic in one direction only automatically operated
- B61L23/18—Control, warning or like safety means along the route or between vehicles or trains for controlling traffic in one direction only automatically operated specially adapted for changing lengths of track sections in dependence upon speed and traffic density
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/20—Trackside control of safe travel of vehicle or train, e.g. braking curve calculation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L3/00—Devices along the route for controlling devices on the vehicle or train, e.g. to release brake or to operate a warning signal
- B61L3/02—Devices along the route for controlling devices on the vehicle or train, e.g. to release brake or to operate a warning signal at selected places along the route, e.g. intermittent control simultaneous mechanical and electrical control
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Train Traffic Observation, Control, And Security (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
本発明の実施形態は、列車制御システムに関する。 Embodiments described herein relate generally to a train control system.
近年、列車が自身で検出した列車位置を、無線を利用して地上側制御装置に通知する列車制御システムが開発されている。このシステムでは、現状の軌道回路を用いた保安機能よりも高い分解能で列車の停止限界位置を設定することができ、移動閉塞による列車運行間隔の短縮が可能である。また、軌道回路が多くの複雑な配線を必要とするのに比べ、地上設備が少なくて済み、設備コストの低減も期待される。 In recent years, a train control system has been developed that notifies the ground-side control device of the train position detected by the train itself using radio. In this system, the train stop limit position can be set with higher resolution than the security function using the current track circuit, and the train operation interval can be shortened due to movement blockage. In addition, compared with the case where the track circuit requires a lot of complicated wiring, the number of ground facilities is small, and the equipment cost is expected to be reduced.
しかし、地上側の無線基地局が故障し、無線通信のできない区間が発生した場合、その区間に在線する車両の位置を地上側で把握できず、停止限界位置を列車に通知することもできなくなるため、この区間の両側で列車の運行が分断されてしまう。 However, if a radio base station on the ground side breaks down and a section where wireless communication is not possible occurs, the position of the vehicle in the section cannot be grasped on the ground side, and the stop limit position cannot be notified to the train. Therefore, the train operation is divided on both sides of this section.
一般に、分岐部を含む区間(以下、連動制御区間と記載する)で無線通信ができなくなった場合は、列車が転てつ器の手前に在線するのか、転てつ器上に在線するのか、転てつ器を通過したのか、地上側の装置では判断できないため、無線通信のできない区間に列車が在線する間は転てつ器を転換することができず、優等列車による追い越しなどの運行が行えない。また、無線通信の途絶した区間で立ち往生した列車を、人間系で誘導し区間外に退避させると、連動制御装置(連動装置とも呼ばれる)は、列車が軌道回路を順に移動したとの情報が得られないため、いわゆる「不正落下」と判断し、信号情報をすべて停止現示にしてしまい、列車運行が停止してしまう。 In general, if wireless communication is not possible in a section that includes a branch (hereinafter referred to as an interlock control section), whether the train is in front of the switch or is on the switch, Since the ground side device cannot determine whether it has passed the switch, the switch cannot be switched while the train is in a section where wireless communication is not possible, and operations such as overtaking by a superior train are not possible. I can't. In addition, when a train stuck in a section where wireless communication is interrupted is guided by a human system and evacuated outside the section, the interlock control device (also called the interlock device) obtains information that the train has moved in the track circuit in order. Therefore, it is determined as a so-called “illegal fall”, all the signal information is stopped and the train operation is stopped.
本発明が解決しようとする課題は、無線を利用して車上から地上に列車在線位置を通知する列車制御システムにおいて、連動制御区間の一部または全体を含むように無線通信のできない区間が発生した場合でも、低コストで、この区間での追い越しや待ち合わせなどの運行を可能とする列車制御システムを提供することである。 The problem to be solved by the present invention is that in a train control system that notifies the position of the train line from the vehicle to the ground using radio, there is a section where wireless communication is not possible so as to include a part or the whole of the interlock control section Even in such a case, it is to provide a train control system that enables operations such as overtaking and waiting in this section at low cost.
実施形態の列車制御システムは、列車の車上無線通信手段と情報を送受信する地上無線通信手段と、前記列車が停車する所定の停止位置に設置され、前記列車の車上通信手段と情報を送受信する地上通信手段と、転てつ器の転換および進路の鎖錠を行う連動制御手段と、列車位置および列車進路の開通状態に基づいて、各列車に与える停止限界位置を算出するとともに前記連動制御手段を制御し、所定区間における各列車の運行制御を行う地上制御手段とを備えている。そして、前記地上制御手段は、前記地上無線通信手段と前記車上無線通信手段との間の無線通信が途絶した区間の一部または全部を含む無線通信途絶設定区間に列車が進入しないようにする停止限界位置を算出し、前記無線通信途絶設定区間を走行させる列車に対する、前記地上通信手段の位置まで到達するようにする停止限界位置または前記無線通信途絶設定区間の先となる停止限界位置を算出し、更に、前記無線通信途絶設定区間に前記列車の一部または全部が在線する状態で、無線通信の途絶している前記列車について、該列車の位置を保持し、前記無線通信途絶設定区間の列車進行方向の終端位置および該列車の停止限界位置のうち上流側の位置を該列車の在線位置とみなし、各列車の運行制御を行う。 The train control system of the embodiment is installed at a predetermined stop position where the train stops, and transmits / receives information to / from the train's on-board communication means. Ground communication means, interlock control means for switching the switch and locking the route, and calculating the stop limit position given to each train based on the train position and the open state of the train route, and the interlock control. And ground control means for controlling the means and controlling the operation of each train in a predetermined section. The ground control means prevents the train from entering a wireless communication disruption setting section including a part or all of a section in which wireless communication between the ground wireless communication means and the on-board wireless communication means is disrupted. A stop limit position is calculated, and a stop limit position that reaches the position of the ground communication means or a stop limit position ahead of the wireless communication disruption setting section is calculated for a train traveling in the wireless communication disruption setting section. In addition, in a state where a part or all of the train is present in the wireless communication disruption setting section, the position of the train is maintained for the train in which wireless communication is disrupted, and the wireless communication disruption setting section Of the end position in the traveling direction of the train and the stop limit position of the train, the position on the upstream side is regarded as the on-line position of the train, and operation control of each train is performed.
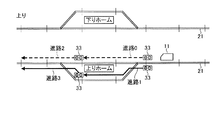
図1は、一実施形態として説明する列車制御システムの全体構成(概略)を示す図である。 Drawing 1 is a figure showing the whole train control system composition (schematic) explained as one embodiment.
同図において、地上側には、運行管理装置1、システム管理装置2、地上制御装置3、連動制御装置4、地上無線通信装置5とそのアンテナ6、ATO(自動列車制御)地上子7、位置補正用地上子8、拠点間ネットワーク9、および沿線ネットワーク10が設置されている。
In the figure, on the ground side, an operation management device 1, a
運行管理装置1は、列車運行ダイヤや列車11の運行状況などに基づき、地上制御装置3に対し進路設定要求等を行う。
The operation management device 1 makes a route setting request to the
システム管理装置2は、システム全体の動作状況の監視、設定変更などを行う。
The
地上制御装置3は、地上無線通信装置5および沿線ネットワーク10を介して各列車11からのその位置情報を受信し、受信した位置情報から各列車11の在線状況を把握し、その情報を、沿線ネットワーク10を介して運行管理装置1およびシステム管理装置2に送信し、さらに連動制御装置4に送信する。
The
連動制御装置4は、地上制御装置3からの列車在線状況の情報と運行管理装置1からの進路設定要求に基づいて転てつ装置(転てつ器)20に必要な指令を出し、転てつ装置20の転換や鎖錠を行い、進路の開通状況に基づいて地上制御装置3に信号情報(進行現示/停止現示)を送信する。
The
本実施形態において地上制御装置3は、連動制御装置4から受信した信号情報と、列車11の在線状況とから、(後行)列車11の進行可能な範囲の先端位置として支障位置(ここでは、先行列車11の後端位置)を求め、その位置から保安制御余裕距離だけ上流側の位置を停止限界位置として、この停止限界位置の情報を地上無線通信装置5および車上無線通信装置15を介して、車上制御装置12に送信する。また、このような停止限界位置の情報は、列車11の駅停止時に、車上子17およびATO地上子7を介しても、車上制御装置12に送信する。
In the present embodiment, the
ATO地上子7は、ホームドア制御などのためにATO装置13との通信を行うものであり、駅の停止位置に必ず設置される。列車11は、このATO地上子7の上またはその近傍に停止するので、本実施形態では地上制御装置3と列車11側との間の通信にも利用する。
The
また、位置補正用地上子8は、速度位置検出装置14が、この装置が算出した自車の位置情報を補正できるようにする位置情報を与える地上子である。 The position correction ground element 8 is a ground element that gives position information that enables the speed position detection device 14 to correct the position information of the host vehicle calculated by the apparatus.
なお、拠点間ネットワーク9は、当該列車制御システムが制御対象とする線区全体に渡って構築され、運行管理装置1およびシステム管理装置2と複数の地上制御装置3との間を、また、複数の地上制御装置3相互間を、通信可能に接続する通信路である。一方、沿線ネットワーク10は、地上制御装置3の制御範囲に亘って構築され、地上制御装置3と複数の地上無線通信装置5との間を、また、地上制御装置3の制御範囲内の複数の地上無線通信装置5相互間を、通信可能に接続する通信路である。
In addition, the network 9 between bases is constructed over the whole line area which the said train control system controls, and between the operation management apparatus 1 and the
続いて、図1において、列車11の車上には、車上制御装置12、ATO装置(自動列車運転装置)13、速度位置検出装置14、車上無線通信装置15とそのアンテナ16、および車上子17が設置されている。
Subsequently, in FIG. 1, on the
車上制御装置12は、地上制御装置3から受けた停止限界位置を過走しないように、また、列車速度が制限速度を超過しないように、列車11の制動装置(図示せず)にブレーキ指令を出す。
The on-
ATO装置13は、車上で列車11の力行/ブレーキ等の制御を行う。列車11は、ATO装置13の力行/ブレーキ指令に基づいて、図示しない駆動/制動装置により車輪19が駆動/制動されてレール21上を走行し、駅の所定の停止位置に設置されたATO地上子7の上に所定の精度で停止する。
The
速度位置検出装置14は、TG(速度発電機:tachogenerator)18のパルス数をカウントし、車輪径とTG18の歯数に基づいて、速度を検出する。なお、速度信号を得る手段はTG18に限る必要はなく、パルスジェネレータ(PG)など、別の手段を利用してもよい。速度位置検出装置14は、さらに、TG18のパルス数、ないし、検出速度を積分して、移動距離を算出するほか、自車の位置を算出し、さらに、位置補正用地上子8から車上子17を介して受信した位置情報に基づいて、自車の位置情報を補正する。この位置情報の補正は、位置補正用地上子8から車上子17を介して受信した地上子識別情報に基づき図示しないデータベースから読み出した地上子設置位置情報に基づいて、自車の位置情報を補正するようにしてもよい。なお、列車11にGPS(Global Positioning System)装置が搭載されている場合は、このGPS装置で検出した位置情報を利用して自車の位置を取得してもよく、更に、TG18またはGPS装置を用いて取得した情報を自車の位置情報として主に利用し、他方から得られた位置情報を補正用などの補助情報として利用してもよい。
The speed position detection device 14 counts the number of pulses of a TG (speed generator: tachogenerator) 18 and detects the speed based on the wheel diameter and the number of teeth of the
速度位置検出装置14は、上記のようにして検出した自車の位置情報を、車上無線通信装置15および地上無線通信装置5を介して、地上制御装置3に送信する。また、列車11の駅停止時には、自車の位置情報を、車上子17およびATO地上子7を介しても、地上制御装置3に送信する。
The speed position detection device 14 transmits the position information of the own vehicle detected as described above to the
なお、運行管理装置1、システム管理装置2、地上制御装置3、連動制御装置4、および車上制御装置12等における情報処理および制御にかかる機能は、情報処理装置を用いて実現することができる。
It should be noted that the functions related to information processing and control in the operation management device 1, the
以上のように構成される本実施形態の列車制御システムは、従来の地上無線通信装置5および車上無線通信装置15による無線通信を利用する列車制御システムと同様の無線通信を行うのみならず、列車11の駅停止時には、車上子17およびATO地上子7を介しても、地上制御装置3および車上制御装置12間で通信を行って、地上側から車上制御装置12へ停止限界位置の情報を送信し、車上側から地上制御装置3へ列車11の位置情報を送信する点を1つの特徴としてもつ。
The train control system of the present embodiment configured as described above not only performs the same wireless communication as the train control system using the wireless communication by the conventional terrestrial
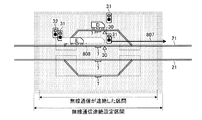
ところで、地上無線通信装置5が故障などにより通信不能になると、無線通信の途絶した区間が生じる。無線通信が途絶した状態では、列車位置を車上側から地上側に通知できず、地上側からは停止限界位置を車上側に通知できないので、安全を確保するため、無線通信の途絶した列車11は緊急停止するようになっている。従来の列車制御システムでは、無線通信の途絶した列車11を、手動の目視運転で待避させ、故障した地上無線通信装置5が復旧して再び無線通信ができるようになるまでは、図2のように、無線通信の途絶した区間の両側で折り返し運転を行うことになり、同区間の両側で列車運行が分断される。また、無線通信途絶設定区間を固定閉塞として扱って列車11を通過させる場合であっても、無線通信途絶設定区間に列車11が在線する間は、この区間内の分岐部に列車11が在線しないかどうかを確認できないため、転てつ装置20の転換を行うことができず、後続列車11による追い越しや待ち合わせなどを行うといった運用はできない。ここで、無線通信が途絶した場合の具体例を、図3−1、図3−2を用いて説明する。なお、ここでは各列車11を区別し説明するため、列車A、列車B、…のように記す。
By the way, when the terrestrial
図3−1の301では列車Bが分岐部上に在線し、同図302では、駅を出発した列車Aが分岐部の手前に停止しているが、駅に到着した列車Bや駅を出発した列車Aが、分岐部の手前に停止しているのか、分岐部上に停止しているのか、分岐部を通過しているのか、地上制御装置3では判断できないため、無線通信が回復して列車Bや列車Aが分岐部に在線しないことが確認できるまでは転てつ装置20を転換することができない。また、同図303に示すように列車Aを人間系で誘導し退避させると、列車Aが軌道回路を順に進行したとの情報が得られないため連動制御装置4で「不正落下」を検知してしまい、各列車11の運行が停止されてしまう。
In FIG. 3-1, the train B is on the branching section, and in FIG. 302, the train A that has left the station stops before the branching section, but leaves the train B or the station that has arrived at the station. Since the
また、無線通信が途絶した区間で立ち往生した列車A、Bを人間系で誘導し退避させた後、図3−2の304に示すように、この区間に列車Cを目視運転で進入させると、列車Cが無線通信の途絶した区間を進出し、通信が回復するまでは、列車Cが分岐部に在線しないことを地上制御装置3で確認できない。このため転てつ装置20を転換できず、列車Cが副本線に停車している間に列車Dに本線を通過させるなどの運用ができない。また、同図305に示すように列車Cを人間系で誘導し進出させると、列車Cが軌道回路を順に進行したとの情報が得られないため連動制御装置4で「不正落下」を検知してしまい、各列車11の運行が停止されてしまう。
In addition, when the trains A and B stuck in the section where the wireless communication is interrupted are guided by the human system and retreated, as shown by 304 in FIG. 3-2, when the train C enters the section by visual operation, The
このように、連動制御区間において無線通信が途絶してしまった場合、従来の制御方法では、追い越しや待ち合わせなどの運行ができなくなる。 As described above, when the wireless communication is interrupted in the interlock control section, the conventional control method cannot perform operations such as overtaking and waiting.
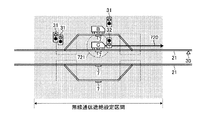
ここで、図3−1および図3−2に、信号機のシンボルで示した「仮想信号機」(図7−1〜図7−15、図8−1〜図8−6に示すものも同様)について、図4−1〜図4−4を用いて説明する。 Here, the “virtual traffic light” indicated by the traffic light symbol in FIGS. 3A and 3B (the same applies to those shown in FIGS. 7-1 to 7-15 and FIGS. 8-1 to 8-6). Will be described with reference to FIGS.
連動制御装置4には、下り、上り、それぞれに複数の進路が定義されている。折り返し運行のない図4−1、図4−2の例では、下り、上りのそれぞれについて進路0〜3が定義され、折り返し運転のある図4−3、図4−4の例では、下り、上りのそれぞれについて進路0〜5が定義されている。
In the
このように定義された各進路への進入の可否を示す情報として、仮想信号機の信号情報を、連動制御装置4から地上制御装置3に与える。例えば、図4−1で、下り列車11が進路0を通って駅に停車したい場合、進路がどれも解錠されている場合は、仮想信号機はどれも停止現示とされる。運行管理システムが進路0の構成を連動制御装置4に要求すると、連動制御装置4は進路0や競合する進路1が解錠されており、進路0上に他列車11がいないことを確認した上で、進路0を構成するのに必要な転てつ装置20を転換して、進路0を構成し、鎖錠し、進路0の入口の仮想信号機を進行現示にする。進行現示が出た進路0は列車11が進入できるようになる。列車11が進路0上のホームに到着すると、進路の最後の軌道回路に列車11が到着したことから、連動制御装置4は進路0を解錠する。これにより、次の列車11のために進路1を構成することが可能になる。なお、図中に示す仮想信号機33は、停止現示/進行現示を具体的に例示するものではなく、シンボルとしてのみ図示している。
The signal information of the virtual traffic light is given from the interlocking
また、図4−1に示す他の進路、及び図4−2〜図4−4に示す各進路についても、上述した図4−1に示す進路0を構成する場合と同様で、運行管理システムがいずれかの進路(ここでは進路Xとして説明する)の構成を連動制御装置4に要求すると、連動制御装置4は進路Xおよび競合する進路が解錠されており、進路X上に他列車11がいないことを確認した上で、進路Xを構成するのに必要な転てつ装置20を転換して、進路Xを構成し、鎖錠し、進路Xの入口の仮想信号機を進行現示にする。進行現示が出た進路Xは列車11が進入できるようになり、列車11が進路Xの最後の軌道回路に到着すると、連動制御装置4は進路Xを解錠する。これにより、次の列車11のために進路Xと競合する進路を構成することが可能になる。
Further, the other routes shown in FIG. 4-1 and the routes shown in FIGS. 4-2 to 4-4 are the same as in the case of configuring the route 0 shown in FIG. Requesting the
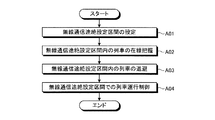
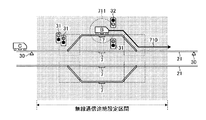
次に、本実施形態の列車制御システムの具体的な列車制御にかかる動作について、図5、図6、図7−1〜図7−15を用いて説明する。図5は、本実施形態の列車制御システムの基本的な処理を説明するフローチャートであり、図6は、本実施形態における、無線伝搬範囲および無線通信途絶設定区間について説明する図である。また、図7−1〜図7−15は、本実施形態の列車制御システムの具体的な動作を説明するための図である。なお、ここでは、副本線から駅を出発した列車A、本線から駅に到着しようとしている列車B、列車Bの後続列車Cが在線している状況を想定している。また、各図における各列車11の進行方向の直前にある停止限界位置30が、各列車11のそれぞれの停止限界位置を示している。また、仮想信号機31は停止現示を示し、仮想信号機32は進行現示を示すものである。
Next, the operation | movement concerning the concrete train control of the train control system of this embodiment is demonstrated using FIG.5, FIG.6, FIG.7-1 to FIG.7-15. FIG. 5 is a flowchart for explaining basic processing of the train control system of the present embodiment, and FIG. 6 is a diagram for explaining a radio propagation range and a radio communication disruption setting section in the present embodiment. FIGS. 7-1 to 7-15 are diagrams for explaining specific operations of the train control system of the present embodiment. Here, it is assumed that the train A that has left the station from the sub-main line, the train B that is about to arrive at the station from the main line, and the train C that follows the train B are present. Moreover, the
本実施形態の列車制御システムの基本となる処理(列車11の待避など人間系による動作を含む)は、図5に示すフローチャートで示される。すなわち、はじめに無線通信途絶設定区間の設定を行い(A01)、次いで、無線通信途絶設定区間で立ち往生した列車11の在線把握の処理を行い(A02)、次いで、無線通信途絶設定区間で立ち往生した列車11の退避を行い(A03)、次いで、無線通信途絶設定区間での列車運行制御を行う(A04)。以下では、以上の処理の詳細を説明する。
The basic processing of the train control system according to the present embodiment (including operations by a human system such as evacuation of the train 11) is shown in the flowchart shown in FIG. That is, first, the wireless communication disruption setting section is set (A01), then, the process of grasping the presence of the
[1.無線通信途絶設定区間の設定]
まず、地上無線通信装置5の故障等により無線通信の途絶した区間が発生すると、この区間内に在線する列車Aと列車Bは無線通信の途絶を検出して緊急停止する(図7−1:701)。地上制御装置3は、例えば、異常が検出された地上無線通信装置5の識別情報を基に、図示しないデータベースから読みだした、異常が検出された地上無線通信装置5の無線伝搬範囲(一定以上の伝搬強度が確保される範囲)に基づいて、無線通信途絶設定区間を設定する。
[1. Wireless communication disruption setting section]
First, when a section in which wireless communication is interrupted due to a failure of the terrestrial
本実施形態では、上記データベースにある各地上無線通信装置5の無線伝搬範囲を、各地上無線通信装置5がカバーする、変動する無線伝搬範囲の最小範囲(すなわち、一定以上の伝搬強度が確保される範囲)としている。そのため、上記で設定する無線通信途絶設定区間は、不確実性を考慮して、実際に無線通信が途絶した範囲よりも広めにとる(図6:同図では、中央の地上無線通信装置5の故障を想定)。なお、図6に示した無線通信途絶設定区間は一例であって、図示したものより広く設定されうる。また、無線通信装置の故障の検出方法としては、例えば特開2007−124148号公報に開示のもの等を採用することができる。また、上記データベースは、例えば、地上無線通信装置5の識別情報とその無線伝搬範囲とを対応付けて記録したものとして構成することができる。
In the present embodiment, the radio propagation range of each terrestrial
[2.無線通信途絶設定区間内の列車の在線把握]
次に、地上制御装置3は、無線通信途絶設定区間で通信が途絶した列車A、Bについて、最後に受信した列車後端位置から、列車A、Bの各々の停止限界位置および無線通信途絶設定区間の終端位置(図中、無線通信途絶設定区間の右端位置)のうち上流側(列車11が進入してくる側)の位置までを、列車A、Bそれぞれの在線範囲とみなし(図7−2:702)、この在線範囲を連動制御装置4に通知する。なお、地上制御装置3は、上記のようにして列車A、Bの在線範囲を決定するために、最後に受信した列車後端位置を保持している。
[2. Grasping the presence of trains in sections where wireless communication is disrupted]
Next, the
一方、無線通信途絶設定区間の上流側の列車Cには、列車Cが無線通信途絶設定区間に進入しないようにするための停止限界位置を与える。その際、列車Cに対して与えられる停止限界位置が、先行列車11の位置により決まる停止限界位置より手前(上流側)に引き戻されることになる可能性があり(図7−2:703)、その場合、無線通信途絶設定区間始端(図中、無線通信途絶設定区間の左端)までの距離によっては、列車Cが新しい停止限界位置までに停止できないことが起こりうる。このように列車Cが新しい停止限界位置を過走してしまう可能性があるが、例えば、引き戻される前の停止限界位置が分岐部より下流側にあり、列車Cが分岐部まで過走してしまったとしても、連動制御装置4が引き戻す前の停止限界位置までの進路を鎖錠しているので、安全は確保される。
On the other hand, a stop limit position for preventing the train C from entering the wireless communication disruption setting section is given to the train C upstream of the wireless communication disruption setting section. At that time, there is a possibility that the stop limit position given to the train C will be pulled back (upstream) from the stop limit position determined by the position of the preceding train 11 (FIG. 7-2: 703), In this case, depending on the distance to the start end of the wireless communication disruption setting section (the left end of the wireless communication disruption setting section in the figure), the train C may not be able to stop before the new stop limit position. In this way, there is a possibility that the train C overruns the new stop limit position. For example, the stop limit position before being pulled back is downstream from the branch part, and the train C overruns to the branch part. Even if this happens, safety is ensured because the path to the stop limit position before the
[3.無線通信途絶設定区間内の列車の退避]
次に、無線通信途絶設定区間で立ち往生した列車A、Bのうち、無線通信途絶設定区間外まで進路が確保できている列車Aは、人間系で誘導し目視運転で進出させる(図7−3:704)。無線通信途絶設定区間から進出した列車Aは、地上制御装置3との通信が回復し自車の位置を報告するので、地上制御装置3で列車位置情報を更新でき、列車Aは通常走行に戻ることができる(図7−4:705)。
[3. Evacuation of trains in sections where wireless communication is disrupted]
Next, among trains A and B stuck in the wireless communication disruption setting section, train A that has a route secured outside the wireless communication disruption setting section is guided by a human system and advanced by visual operation (FIG. 7-3). : 704). Train A that has advanced from the wireless communication disruption setting section recovers communication with the
その後、連動制御装置4は、列車Aが進路終端に達したことを地上制御装置3から通知され、鎖錠していた出発進路(図7−4:706)を解錠する。地上制御装置3から通知される在線情報は、列車Aの在線範囲が進路の途中を飛ばして遷移することはないため、連動制御装置4で異常(不正落下)を検出して運行が停止することはない。
Thereafter, the
次に、無線通信途絶設定区間で立ち往生した列車A、Bのうち、駅停止位置より上流側の列車Bは、駅停止位置までの進路は取れているので、人間系で誘導し、目視運転で停止位置まで移動させる(図7−5:707)。所定停止位置に停止した列車Bは、車上子17とATO地上子7を介して自車の位置を地上制御装置3に報告するので、地上制御装置3では列車位置情報を更新できる(図7−6:708)。その後、連動制御装置4は、列車Bが進路終端に達したことを地上制御装置3から通知され、鎖錠していた進路(図7−6:709)を解錠する。
Next, of the trains A and B stuck in the wireless communication disruption setting section, the train B upstream from the station stop position has a route to the station stop position. Move to the stop position (FIG. 7-5: 707). Since the train B stopped at the predetermined stop position reports the position of the own vehicle to the
以上で無線通信途絶設定区間発生時に区間内で立ち往生した列車A、Bがすべて、無線通信途絶設定区間外に進出した状態またはATO地上子7を介して位置を把握できる状態になったので、無線通信途絶設定区間内の在線状況が把握できる状態となった。
As described above, all the trains A and B stuck in the section when the wireless communication disruption setting section occurs have entered the state outside the wireless communication disruption setting section or have been able to grasp the position via the
[4.無線通信途絶設定区間での列車運行制御]
次に、無線通信途絶設定区間での列車運行に関し、列車Bを先に出発させる場合と、列車Bと列車Cが待ち合わせを行う場合の2ケースについて、説明する。
[4. Train operation control in the wireless communication disruption setting section]
Next, regarding the train operation in the wireless communication disruption setting section, two cases where the train B departs first and the train B and the train C wait will be described.
(4−1.列車Bを先に出発させる場合)
この場合、駅を出発する進路や競合する進路にいずれかの列車11が在線していないことが確認できているので、運行管理装置1からの進路設定要求に基づいて、連動制御装置4は列車Bが駅から出発するための進路(図7−7:710)を設定し、鎖錠して、進路の信号情報を進行現示にする(図7−7:32)。
(4-1. When leaving train B first)
In this case, since it has been confirmed that one of the
地上制御装置3は、連動制御装置4からの信号情報と各列車11の在線状況とから算出される列車Bの停止限界位置が、列車後端が無線通信途絶設定区間から抜けられる位置より上流側である間は、算出した停止限界位置の代わりに、出発進路入口を支障位置とする停止限界位置を、ATO地上子7と車上子17を介して列車Bの車上制御装置12に通知する。この間、列車Bは、停止したままとなる。
In the
地上制御装置3は、連動制御装置4からの信号情報と各列車11の在線状況とから算出される列車Bの停止限界位置が、列車後端が無線通信途絶設定区間から抜けられる位置より下流側になったら、列車Bの車上制御装置12に、この停止限界位置と、無線通信途絶設定区間終端位置と、無線通信が途絶しても非常停止しない(非常ブレーキをかけない)モードへの移行指示とを、ATO地上子7と車上子17を介して送信する(図7−7:711)。この後、列車Bは自動運転で出発する。通常では、無線通信が途絶した区間では、列車11は非常ブレーキをかけて緊急停止をするが、本実施形態では、「無線通信が途絶しても非常停止しないモード」へ移行すると、列車11は無線通信が途絶しても停止せずに運行を継続するので、自動運転が可能である。
In the
列車Bが移動し始めてATO地上子7と車上子17との結合が切れると、地上制御装置3と車上制御装置12との通信が途絶するので、地上制御装置3は、最後に受信した列車後端位置(駅に停車していた時の後端位置)から、列車Bの停止限界位置と無線通信途絶設定区間の終端位置のうち上流側の位置までを、列車Bの在線範囲とみなす(図7−8:712)。その後無線通信途絶設定区間から進出した列車Bは、地上制御装置3との通信が回復し自列車位置を報告するので、地上制御装置3で列車位置情報を更新でき、列車Bは、無線通信が途絶しても非常停止しないモードを解除し、通常走行に戻ることができる(図7−9:713)。
When the train B starts to move and the connection between the
連動制御装置4は、列車Bが進路終端に達したことを地上制御装置3から通知され、鎖錠していた出発進路(図7−9:714)を解錠する。地上制御装置3から通知される在線情報は、列車Bの在線範囲が進路の途中を飛ばして遷移することはないため、連動制御装置4で異常(不正落下)を検出して運行が停止することはない。
The interlocking
(4−2.列車Bと列車Cが待ち合わせを行う場合)
この場合、駅に進入する進路や競合する進路にいずれかの列車11が在線していないことが確認できているので、連動制御装置4は、運行管理装置1からの進路設定要求に基づいて転てつ装置20の転換指令を出して列車Cが駅に到着するための進路(図7−10:715)を設定し、鎖錠して、進路の信号情報を進行現示にする(図7−10:32)。
(4-2. When train B and train C meet)
In this case, since it has been confirmed that one of the
地上制御装置3は、連動制御装置4からの信号情報と列車Bの在線状況とから算出される列車Cの停止限界位置が、駅の所定の停止位置(ATO地上子7)まで到達できる位置より上流側である間は、算出した停止限界位置の代わりに、無線通信途絶設定区間始端を支障位置とする停止限界位置を、無線通信により列車Cに通知する。これにより、列車Cが、無線通信途絶設定区間に進入することはない。
The
その後、(1)連動制御装置4からの信号情報と列車Bの在線状況とから算出される列車Cの停止限界位置が、駅の所定の停止位置(ATO地上子7)まで到達できる位置より下流側になり、且つこの停止限界位置が列車Cの列車後端が無線途絶区間から抜け出せる位置より上流側である場合、地上制御装置3は、列車Cに、停車時に地上子7と通信できる位置とする停止限界位置と、無線通信途絶設定区間終端位置と、無線通信が途絶しても非常停止しないモードへの移行指示とを、無線通信により送信し、また、(2)連動制御装置4からの信号情報と列車Bの在線状況とから算出される列車Cの停止限界位置が、駅の所定の停止位置(ATO地上子7)まで到達できる位置より下流側になり、更に、この停止限界位置が列車Cの列車後端が無線途絶区間から抜け出せる位置である場合、地上制御装置3は、列車Cに、この停止限界位置と、無線通信途絶設定区間終端位置と、無線通信が途絶しても非常停止しないモードへの移行指示とを、無線通信により送信する(図7−10:716)。これに応じて、列車Cは自動運転で無線通信途絶設定区間に進入し、設定された進路(図7−10:715)を進行する。
Thereafter, (1) the stop limit position of the train C calculated from the signal information from the
列車Cが無線通信途絶設定区間に進入して地上制御装置3と車上制御装置12との無線通信が途絶すると、地上制御装置3は、最後に受信した列車後端位置から、列車Cの停止限界位置と無線通信途絶設定区間の終端位置のうち上流側の位置までを、列車Cの在線範囲とみなす(図7−11:717)。
When the train C enters the wireless communication disruption setting section and the wireless communication between the
駅に到着し所定停止位置に停止した列車Cは、車上子17とATO地上子7を介して自列車位置を報告するので、地上制御装置3では列車位置情報を更新できる(図7−12:718)。連動制御装置4は、列車Cが進路終端に達したことを地上制御装置3から通知され、鎖錠していた進路(図7−12:719)を解錠する。
Since the train C that has arrived at the station and stopped at the predetermined stop position reports its own train position via the vehicle
このケースにおいて列車C(または列車B)を駅から出発させる手順は、前述した4−1.列車Bを先に出発させる場合と同様であり、ここではその説明を省略する。このケースにおける前述の図7−7〜図7−9に対応する図を図7−13〜図7−15に示す。これらの図に示す符号720〜724部分は、先に説明した図7−7〜図7−9の符号710〜714部分に対応している。
In this case, the procedure for leaving the train C (or train B) from the station is the same as that described in 4-1. This is the same as when the train B departs first, and the description thereof is omitted here. FIGS. 7-13 to 7-15 show diagrams corresponding to FIGS. 7-7 to 7-9 in this case.
なお、列車Bと列車Cが待ち合わせる運行の代わりに、駅を通過する進路を設定・鎖錠し、図7−10の716で無線通信途絶設定区間を進出できる停止限界位置を与えることにより、列車Cに列車Bを追い越させる運行も可能である。 Instead of the operation of waiting for train B and train C, the route passing through the station is set and locked, and the stop limit position at which the wireless communication disruption set section can be advanced at 716 in FIG. It is also possible to operate C overtaking train B.
次に、その他の実施例として、本実施形態の列車制御システムにおいて進路設定変更の途中で無線通信途絶設定区間が発生した場合の動作について、図8−1〜図8−6を用いて説明する。図8−1〜図8−6は、実施形態の列車制御システムにおいて進路設定変更の途中で無線通信途絶設定区間が発生した場合の動作について説明する図である。なお、図8−1〜図8−6における記載の仕方は、前述の図7−1〜図7−15に準ずる。 Next, as another example, an operation when a wireless communication disruption setting section occurs in the course control change of the train control system of the present embodiment will be described with reference to FIGS. 8-1 to 8-6. . FIGS. 8-1 to 8-6 are diagrams for explaining the operation when a wireless communication disruption setting section occurs during the course setting change in the train control system of the embodiment. In addition, the way of description in FIGS. 8-1 to 8-6 is based on FIGS. 7-1 to 7-15 described above.
図8−1に示す列車Eのために本線への駅到着進路と本線からの出発進路を鎖錠した状態のときに(このとき本線進路上の仮想信号機は進行現示の仮想信号機32となっている;他は停止現示の仮想信号機31)、列車Eの到着が遅れているために副本線に停車中の列車Dを先に出発させることにした場合は、運行管理装置1から連動制御装置4に本線出発進路の解錠と、副本線出発進路の鎖錠を要請する。連動制御装置4は本線出発進路についての信号情報を停止現示とし(図8−2:801)、これに基づいて地上制御装置3が、本線出発進路入口を支障位置とする停止限界位置を算出する。このとき列車Eの停止限界位置は引き戻される(図8−2:802)。
When the station arrival route to the main line and the departure route from the main line are locked for the train E shown in FIG. 8A (at this time, the virtual traffic signal on the main route becomes the
このとき無線通信に支障がなければ、地上制御装置3は、算出した停止限界位置を、列車Eの車上制御装置12に通知する。
At this time, if there is no problem with the wireless communication, the
この通知を受けた列車Eの車上制御装置12は、新しい停止限界位置までに停止可能と地上制御装置3に回答し(図8−3:803)、この回答を受けた地上制御装置3は、連動制御装置4に、停止現示とした進路について解錠可と通知する。
Upon receiving this notification, the on-
この通知を受けた連動制御装置4は、列車Eが停止するのに必要な時間だけ待ってから、本線出発進路(図8−3:804)を解錠し、列車Dのために、副本線出発進路(図8−3:805)を設定し、鎖錠する。
Receiving this notification, the
一方、この停止限界位置を列車Eの車上制御装置12が受信する前に、無線通信の途絶した区間が発生した場合(図8−4)、無線通信途絶により列車Eは非常停止するが(図8−4:806)、それまで本線出発進路は進入が許可されているとの認識で走行していたので、本線出発進路の内方まで進入してから停止する可能性がある。従来の連動制御のように、地上制御装置3が、引き戻された停止限界位置を列車Eに送信したことを連動制御装置4に報告してから一定時間後に本線出発進路を解錠すると、転てつ装置20が固定されていない状態の分岐部に列車Eが進入し、脱線する可能性がある。
On the other hand, if a section in which wireless communication is interrupted occurs before the on-
本実施例では、車上制御装置12は、常時、通知された停止限界位置と、この停止限界位置までに停止可能かどうかを、地上制御装置3に通知する。引き戻された停止限界位置を列車Eが受信する前に無線通信が途絶してしまったので、地上制御装置3が列車Eの車上制御装置12から最後に受信したのは、引き戻される前の停止限界位置(=駅を通過できる停止限界位置)までに停止可能との情報である。
In the present embodiment, the on-
地上制御装置3は、信号情報のうち、(1)進行現示の進路に対しては「解錠不可」を、(2)停止現示の進路に対しては、この進路入口までに停止可能との通知が車上制御装置12から得られている場合は「解錠可」を、(3)それ以外の場合は「解錠不可」を、連動制御装置4に通知する。地上制御装置3は、列車Eの車上制御装置12から「本線出発進路入口までに停止できる」という情報は得られていないので、本線出発進路(図8−5:807)について、連動制御装置4に「解錠不可」を通知する。また、地上制御装置3は、前述のように、無線通信途絶設定区間を設定し、ここでは図8−5:808で示す範囲を列車Eの在線範囲としてみなして、制御を行う。
The
連動制御装置4は、「解錠可」の情報が得られた場合のみ、設定した進路を列車進入前に解錠することができる。ここでは、地上制御装置3からは「解錠不可」の情報が通知されているので、本線出発進路を鎖錠したままとするので安全は確保される。
The
無線通信途絶設定区間で立ち往生した列車Eを、人間系で誘導し駅停止位置まで移動させると(図8−6:809)、車上制御装置12はATO地上子7を介して地上制御装置3から新しい停止限界位置を受信し、この停止限界位置までに停止可能との情報を返送できるので、地上制御装置3は連動制御装置4に「解錠可」を通知する。この通知を受けて、連動制御装置4は、本線出発進路(図8−6:810)を安全に解錠することができる。
When the train E stuck in the wireless communication disruption setting section is guided by the human system and moved to the station stop position (FIG. 8-6: 809), the on-
以上のようにして、進路設定変更の途中で無線通信途絶設定区間が発生した場合であっても、列車11の運行を継続することができる。
As described above, even when a wireless communication disruption setting section occurs during the course setting change, the operation of the
以上説明したとおり、上記実施形態の列車制御システムによれば、無線を利用して車上から地上側制御装置に列車在線位置を通知する列車制御システムにおいて、連動制御区間の一部あるいは全体を含むように無線通信のできない区間が発生した場合でも、安全を確保しながら、この区間での追い越しや待ち合わせなどの運行が、低コストで実現可能となる。 As described above, according to the train control system of the above-described embodiment, in the train control system that notifies the on-line position from the vehicle to the ground side control device using radio, part or all of the interlock control section is included. Thus, even when a section where wireless communication is impossible occurs, operations such as overtaking and waiting in this section can be realized at low cost while ensuring safety.
なお、上記にて本発明の実施形態およびいくつかの実施例を説明したが、これらの実施形態および実施例は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態および実施例は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これらの実施形態および実施例ならびにその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。 Although the embodiments and some examples of the present invention have been described above, these embodiments and examples are presented as examples and are not intended to limit the scope of the invention. . These novel embodiments and examples can be implemented in various other forms, and various omissions, replacements, and changes can be made without departing from the spirit of the invention. These embodiments and examples and modifications thereof are included in the scope and gist of the invention, and are included in the invention described in the claims and the equivalents thereof.
1 運行管理装置
2 システム管理装置
3 地上制御装置
4 連動制御装置
5 地上無線通信装置
6、16 アンテナ
7 ATO地上子
8 位置補正用地上子
9 拠点間ネットワーク
10 沿線ネットワーク
11 列車
12 車上制御装置
13 ATO装置
14 速度位置検出装置
15 車上無線通信装置
17 車上子
18 TG
19 車輪
20 転てつ装置
21 レール
DESCRIPTION OF SYMBOLS 1
19
Claims (5)
前記列車が停車する所定の停止位置に設置され、前記列車の車上通信手段と情報を送受信する地上通信手段と、
転てつ器の転換および進路の鎖錠を行う連動制御手段と、
列車位置および列車進路の開通状態に基づいて、各列車に与える停止限界位置を算出するとともに前記連動制御手段を制御し、所定区間における各列車の運行制御を行う地上制御手段と、
を備えた列車制御システムであって、
前記地上制御手段が、
前記地上無線通信手段と前記車上無線通信手段との間の無線通信が途絶した区間の一部または全部を含む無線通信途絶設定区間に列車が進入しないようにする停止限界位置を算出し、
前記無線通信途絶設定区間を走行させる列車に対する、前記地上通信手段の位置まで到達するようにする停止限界位置または前記無線通信途絶設定区間の先となる停止限界位置を算出し、
前記無線通信途絶設定区間に前記列車の一部または全部が在線する状態で、無線通信の途絶している前記列車について、該列車の位置を保持し、前記無線通信途絶設定区間の列車進行方向の終端位置および該列車の停止限界位置のうち上流側の位置を該列車の在線位置とみなし、各列車の運行制御を行う、
列車制御システム。 A terrestrial wireless communication means for transmitting and receiving information to and from a train wireless communication means;
Ground communication means installed at a predetermined stop position where the train stops, and transmitting and receiving information to and from the on-vehicle communication means of the train;
Interlocking control means for switching the switch and locking the course;
Based on the train position and the open state of the train route, calculating the stop limit position to be given to each train and controlling the interlock control means, ground control means for controlling the operation of each train in a predetermined section,
A train control system comprising:
The ground control means is
Calculating a stop limit position that prevents a train from entering a wireless communication disruption setting section including a part or all of a section in which wireless communication between the ground wireless communication means and the on-board wireless communication means is disrupted;
For the train that runs in the wireless communication disruption setting section, to calculate the stop limit position to reach the position of the ground communication means or the stop limit position ahead of the wireless communication disruption setting section,
In a state where a part or all of the train is present in the wireless communication disruption setting section, for the train in which wireless communication is disrupted, the position of the train is maintained, and the train traveling direction of the wireless communication disruption setting section Of the end position and the stop limit position of the train, the position on the upstream side is regarded as the current position of the train, and the operation of each train is controlled.
Train control system.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012287515A JP5885654B2 (en) | 2012-12-28 | 2012-12-28 | Train control system |
| PCT/JP2013/005317 WO2014103102A1 (en) | 2012-12-28 | 2013-09-09 | Train control system and train control method |
| CN201380045098.6A CN104583052B (en) | 2012-12-28 | 2013-09-09 | Train control system and Train control method |
| EP13867115.1A EP2939901B1 (en) | 2012-12-28 | 2013-09-09 | Train control system and train control method |
| IN1601DEN2015 IN2015DN01601A (en) | 2012-12-28 | 2013-09-09 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012287515A JP5885654B2 (en) | 2012-12-28 | 2012-12-28 | Train control system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014129029A JP2014129029A (en) | 2014-07-10 |
| JP5885654B2 true JP5885654B2 (en) | 2016-03-15 |
Family
ID=51020245
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012287515A Expired - Fee Related JP5885654B2 (en) | 2012-12-28 | 2012-12-28 | Train control system |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2939901B1 (en) |
| JP (1) | JP5885654B2 (en) |
| CN (1) | CN104583052B (en) |
| IN (1) | IN2015DN01601A (en) |
| WO (1) | WO2014103102A1 (en) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6310868B2 (en) * | 2015-02-12 | 2018-04-11 | 株式会社日立製作所 | Course control system, course control method, and ground device |
| JP6541563B2 (en) * | 2015-12-10 | 2019-07-10 | 株式会社日立製作所 | Railway security system and interlocking device |
| JP6657391B2 (en) * | 2016-05-12 | 2020-03-04 | 株式会社京三製作所 | Ground equipment |
| CN109153395B (en) | 2016-05-12 | 2021-03-09 | 株式会社京三制作所 | Train control system |
| WO2017195317A1 (en) * | 2016-05-12 | 2017-11-16 | 株式会社京三製作所 | Ground device |
| KR101834854B1 (en) * | 2016-07-28 | 2018-03-07 | 한국철도기술연구원 | train-centric electronic interlocking system for connected train based autonomous train control system and the method thereof |
| WO2018025365A1 (en) * | 2016-08-04 | 2018-02-08 | 三菱電機株式会社 | Wireless train control system and wireless train control method |
| JP6799432B2 (en) * | 2016-10-13 | 2020-12-16 | 東日本旅客鉄道株式会社 | Railroad vehicle mileage record grasping system |
| JP6925144B2 (en) * | 2017-03-22 | 2021-08-25 | 株式会社日立製作所 | Wireless train control system and its ground side control device |
| CN107128336A (en) * | 2017-04-25 | 2017-09-05 | 王昌兴 | Rail cars group, which is thrown, stops carrying additionally system and method |
| CN109285345A (en) * | 2018-09-06 | 2019-01-29 | 杭州飞遁科技有限公司 | A kind of traffic circulation network failure allocation processing method |
| JP7349384B2 (en) * | 2020-02-13 | 2023-09-22 | 東日本旅客鉄道株式会社 | central device |
| CN111746596A (en) * | 2020-06-11 | 2020-10-09 | 中铁第四勘察设计院集团有限公司 | Train parking control method and device |
| CN111746597A (en) * | 2020-06-11 | 2020-10-09 | 中铁第四勘察设计院集团有限公司 | Train parking control system and method |
| CN112061180B (en) * | 2020-08-28 | 2022-07-19 | 交控科技股份有限公司 | Turnout side-impact protection method and system |
| US11722210B2 (en) * | 2021-01-12 | 2023-08-08 | Tencent America LLC | Unmanned aerial system communication |
| CN114228788B (en) * | 2021-12-13 | 2023-09-08 | 卡斯柯信号有限公司 | Rail side auxiliary positioning method, device, equipment and medium for out-of-position train |
| CN115140125B (en) * | 2022-08-19 | 2023-08-18 | 中国人民解放军国防科技大学 | Train positioning method based on LDV, UWB, MEMS combination |
| WO2024048075A1 (en) * | 2022-08-31 | 2024-03-07 | 株式会社日立製作所 | Train control system |
| CN115923887B (en) * | 2023-03-10 | 2023-05-05 | 北京全路通信信号研究设计院集团有限公司 | Train route handling method and device, electronic equipment and storage medium |
| CN116395004B (en) * | 2023-06-08 | 2023-08-15 | 北京全路通信信号研究设计院集团有限公司 | Train operation control method and system |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11245818A (en) * | 1998-03-06 | 1999-09-14 | Toshiba Corp | Train communication apparatus and method |
| JP4070490B2 (en) * | 2002-03-27 | 2008-04-02 | 株式会社京三製作所 | Train control system and train control method |
| JP4301888B2 (en) * | 2003-08-27 | 2009-07-22 | 日本信号株式会社 | Train control device |
| JP4714490B2 (en) * | 2005-03-18 | 2011-06-29 | 北海道旅客鉄道株式会社 | In-vehicle device and operation management device |
| JP2006298069A (en) * | 2005-04-18 | 2006-11-02 | Toshiba Corp | Radio train control system |
| JP4641245B2 (en) | 2005-10-26 | 2011-03-02 | 三菱電機株式会社 | Ad hoc network system, wireless ad hoc terminal and failure detection method thereof |
| JP4471996B2 (en) * | 2007-09-18 | 2010-06-02 | 株式会社日立製作所 | Train control system |
| JP5268737B2 (en) * | 2009-03-27 | 2013-08-21 | 株式会社日立製作所 | Radio train control system, radio train control on-board system and radio train control ground system |
| JP5355495B2 (en) * | 2010-01-13 | 2013-11-27 | 株式会社日立製作所 | Signal security system |
-
2012
- 2012-12-28 JP JP2012287515A patent/JP5885654B2/en not_active Expired - Fee Related
-
2013
- 2013-09-09 CN CN201380045098.6A patent/CN104583052B/en not_active Expired - Fee Related
- 2013-09-09 IN IN1601DEN2015 patent/IN2015DN01601A/en unknown
- 2013-09-09 WO PCT/JP2013/005317 patent/WO2014103102A1/en active Application Filing
- 2013-09-09 EP EP13867115.1A patent/EP2939901B1/en not_active Not-in-force
Also Published As
| Publication number | Publication date |
|---|---|
| EP2939901A1 (en) | 2015-11-04 |
| WO2014103102A1 (en) | 2014-07-03 |
| JP2014129029A (en) | 2014-07-10 |
| IN2015DN01601A (en) | 2015-07-03 |
| CN104583052B (en) | 2016-11-09 |
| EP2939901B1 (en) | 2018-03-21 |
| CN104583052A (en) | 2015-04-29 |
| EP2939901A4 (en) | 2016-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5885654B2 (en) | Train control system | |
| CN110758484B (en) | Train automatic driving method, VOBC, TIAS and area controller | |
| JP5940789B2 (en) | Train control system | |
| US10293842B2 (en) | On-board device, signaling system, and control method of moving vehicle | |
| JP7535970B2 (en) | On-board equipment for automatic train operation system | |
| JP7181048B2 (en) | Automated train driving system | |
| JP2010228648A (en) | Crossing control device | |
| CN111845854A (en) | Communication-based train degeneration protection method and system | |
| JP2017055518A (en) | Train control system | |
| EP2937259B1 (en) | Train control device, and train control method | |
| JP5826543B2 (en) | Train control device | |
| JP5341570B2 (en) | Train control device, control method and control system | |
| JP2006137337A (en) | Train control system and train control method | |
| JP7219047B2 (en) | Automated train driving system | |
| JP2010259167A (en) | Vehicle | |
| JP2011045207A (en) | On-board information-intensive advanced safety train control system | |
| TWI715987B (en) | Train operation management system | |
| JPH02109769A (en) | Interlock control method for railway signal interlocking device | |
| JP2022124241A (en) | Train control system and control method | |
| JP2008049754A (en) | Train information transmission device | |
| WO2018163509A1 (en) | Signal safety system, ground management device, on-board wireless device, and train control method | |
| TWI715988B (en) | On-vehicle apparatus | |
| JP7048346B2 (en) | Operation management system | |
| JP2024002192A (en) | Automatic operation system and on-vehicle device | |
| JP2024090484A (en) | Train control system and train control system method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150227 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20151102 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160209 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5885654 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |