JP5873075B2 - 共鳴リニアコンプレッサのピストンの制御システム、共鳴リニアコンプレッサのピストンの制御方法および共鳴リニアコンプレッサ - Google Patents
共鳴リニアコンプレッサのピストンの制御システム、共鳴リニアコンプレッサのピストンの制御方法および共鳴リニアコンプレッサ Download PDFInfo
- Publication number
- JP5873075B2 JP5873075B2 JP2013508333A JP2013508333A JP5873075B2 JP 5873075 B2 JP5873075 B2 JP 5873075B2 JP 2013508333 A JP2013508333 A JP 2013508333A JP 2013508333 A JP2013508333 A JP 2013508333A JP 5873075 B2 JP5873075 B2 JP 5873075B2
- Authority
- JP
- Japan
- Prior art keywords
- linear compressor
- piston
- resonant linear
- calculated
- resonant
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B35/00—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for
- F04B35/04—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for the means being electric
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B35/00—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for
- F04B35/04—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for the means being electric
- F04B35/045—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for the means being electric using solenoids
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
- F04B49/065—Control using electricity and making use of computers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/10—Other safety measures
- F04B49/103—Responsive to speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B51/00—Testing machines, pumps, or pumping installations
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B53/00—Component parts, details or accessories not provided for in, or of interest apart from, groups F04B1/00 - F04B23/00 or F04B39/00 - F04B47/00
- F04B53/001—Noise damping
- F04B53/003—Noise damping by damping supports
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B53/00—Component parts, details or accessories not provided for in, or of interest apart from, groups F04B1/00 - F04B23/00 or F04B39/00 - F04B47/00
- F04B53/14—Pistons, piston-rods or piston-rod connections
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/16—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with polarised armatures moving in alternate directions by reversal or energisation of a single coil system
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/14—Structural association with mechanical loads, e.g. with hand-held machine tools or fans
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/032—Reciprocating, oscillating or vibrating motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2201/00—Pump parameters
- F04B2201/02—Piston parameters
- F04B2201/0202—Linear speed of the piston
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2201/00—Pump parameters
- F04B2201/02—Piston parameters
- F04B2201/0206—Length of piston stroke
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/04—Motor parameters of linear electric motors
- F04B2203/0409—Linear speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2210/00—Working fluid
- F05B2210/10—Kind or type
- F05B2210/12—Kind or type gaseous, i.e. compressible
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S415/00—Rotary kinetic fluid motors or pumps
Description
本発明はさらに、共鳴リニアコンプレッサのピストンの制御方法に関し、その制御ステップは、コンプレッサモータを効率的に制御するために、このピストンの速度および変位の推定を可能とする。
さらに本発明は、特許請求の範囲において提案するように、制御システムを備えた共鳴リニアコンプレッサに関する。
a)共鳴リニアコンプレッサの各動作サイクルにおいて、離散化周波数で、電気モータの測定電流を測定し、
b)電気モータの測定電流から共鳴リニアコンプレッサの動作サイクルを計算し、そして、計算された動作サイクルに基づいて、共鳴リニアコンプレッサの共鳴周波数を計算し、
c)共鳴リニアコンプレッサの各動作サイクルで、離散化周波数で、モータの計算電流、ピストン変位及びピストン速度を計算し、
d)共鳴リニアコンプレッサの各動作サイクルで、離散化周波数で、モータの測定電流と計算電流間の相違によって計算される電流誤差を計算し、
e)ステップcで計算されたピストン変位に基づいて、共鳴リニアコンプレッサの1動作サイクルにおける最大ピストン変位を計算し、
f)測定電流と電気モータのインバータによって印加された動作電圧から、1動作サイクル中の電気モータの実際の入力電力を計算し、
g)測定電流から、1動作サイクル中のモータの電気抵抗において消費された電力を計算し、
h)ステップcで計算されたピストン速度から合計減衰力を計算し、
i)先行するステップに計算された合計減衰力から、および、ステップc)で計算されたピストン速度から、合計減衰によって消費された電力を計算し、
j)ステップf)において計算された電気モータにおける実際の入力電力の関数として、および、ステップb)で計算された動作サイクルの関数として、等価連続力を計算し、
k)最大ピストン変位および速度からおよび測定電流から、リニアコンプレッサの電気モータ上に印加されるべき動作−電圧値を計算し、さらに、
l)ステップk)で計算された動作−電圧値を共鳴リニアコンプレッサ電気モータに印加する、各ステップ。
i)マイクロプロセッサベースの電子回路からかつ共鳴リニアコンプレッサの1動作サイクルにおいて、電気モータの測定電流を測定し、
ii)測定電流と電気モータのインバータに印加された動作電圧とに基づいて、モータの少なくとも1セットの電気パラメータとリニアコンプレッサの少なくとも1セットの機械的パラメータとを計算し、
iii)ステップi)およびii)において測定され計算された値に基づいて、共鳴リニアコンプレッサのピストンの最大変位と速度を計算し、
iv)ステップiii)で獲得されたピストンの最大変位と速度から、リニアコンプレッサの電気モータのインバータに印加すべき動作電圧に対する新しい値を調整し、さらに、
v)共鳴リニアコンプレッサの電気モータのインバータにステップiv)で調整された動作電圧を印加する、各ステップ。

1)共鳴周波数における変化、
2)ガスに伝搬されるエネルギー消費、および
3)ピストンの1振動の中間点の変位(変位におけるオフセット(ずれ))、である。
FR−共鳴周波数
TR−共鳴周波数期間、である。
a−共鳴周波数期間におけるサンプル数
Pe−モータの入口で測定された電力
PR−推定器によって計算された、抵抗における電力
FAM−推定器によって計算された、合計減衰によって生成される力
PAM−推定器によって計算された、合計減衰によって消費される電力
TR−共鳴周波数期間または1起動サイクル期間
Δt−サンプル期間、即ち2個の連続するサンプル間の期間、である。
a)離散化周波数Fd、電気モータの測定電流imで、共鳴リニアコンプレッサ100の各動作サイクルTRを測定し、
b)電気モータの測定電流値imから共鳴リニアコンプレッサ100の動作サイクルTRを計算し、計算された動作サイクルTRに基づいて共鳴リニアコンプレッサ100の共鳴周波数RFを計算し、
c)離散化周波数Fd、モータの計算電流ie(t)、ピストン変位de(t)およびピストン速度ve(t)における、共鳴リニアコンプレッサ100の各動作サイクルTRを計算し、
d)離散化周波数RF、モータの測定電流imと計算電流ie(t)間の相違によって計算される電流誤差ieoで、共鳴リニアコンプレッサ100の各動作サイクルTRを計算し、
e)ステップc)で計算されたピストン変位de(t)に基づいて、共鳴リニアコンプレッサ100のピストンの最大変位DMAXを計算し、
f)測定電流imと電気モータのインバータによって印加された動作電圧Ucとから電気モータ上の実際のPeの入力電力を動作サイクルTRにおいて計算し、
g)測定電流imからモータの電気抵抗Rとして消費電力PRを、動作サイクルTRにおいて計算し、
h)合計減衰係数KAMTとステップc)で計算されたピストン速度Ve(t)とから、動作サイクルTRにおいて生成された合計減衰力FAMTを計算し、
i)先行するステップにおいて計算された合計減衰力FAMTとステップc)において計算されたピストン速度Ve(t)とから、合計減衰PAMTによって消費された電力を計算し、
j)ステップf)で計算された電気モータの実際の入力電力Peの関数として、かつステップb)で計算された動作サイクルTRの関数として、等価連続力FContを計算し、
k)最大変位DMAXからおよびピストン速度Ve(t)と測定電流imとから、リニアコンプレッサ100の電気モータに印加されるべき動作電圧値ucを計算し、さらに
i)ステップkで計算された動作電uCを、共鳴リニアコンプレッサ100の電気モータに印加する、各ステップ。
m)計算された実際の入力電力Peが、合計減衰PAMTによって消費された電力と消費電力PRとの合計よりも大きい場合、合計減衰係数KAMTの値を次の動作サイクルTRに増加させ、さらに
n)計算された実際の入力電力Peが、合計減衰PAMTによって消費された電力と消費電力PRとの合計よりも小さい場合、合計減衰係数KAMTの値を次の動作サイクルTRに減少させる。
o)ステップeで計算されたピストンの最大変位DMAXとプログラムされた基準変位DREF間の比較から、第1基準電流I1refを調整し、
p)ステップcで計算されたピストン速度Ve(t)によって調整された第2の基準電流i1refを調整し、
q)基準電流(i2ref)と測定電流(im)間の相違によって制御電流誤差(ice)を調整し、
r)先行するステップにおいて計算された制御電流誤差(ice)から電気モータの周波数インバータに印加される動作電圧(uc)を調整する。
i)微小加工された電子回路と、離散化周波数Fdを有する共鳴リニアコンプレッサ100の動作サイクルTRから、電気モータの測定電流imを測定し、
ii)測定電流imと電気モータのインバータに印加された動作電圧ucとに基づいて、モータの電気パラメータの少なくとも1セットと、リニアコンプレッサ100の機械パラメータの少なくとも1セットとを計算し、
iii)ステップi)およびii)において測定され計算された値に基づいて、共鳴リニアコンプレッサ100の最大変位DMAXとピストン速度Ve(t)を計算し、
iv)ステップiii)で得られた最大変位DMAXとピストン速度Ve(t)から、リニアコンプレッサ100の電気モータのインバータに印加されるべき動作電圧ucの新しい値を調整し、さらに、
v)共鳴リニアコンプレッサ100の電気モータのインバータに、ステップiv)で調整された動作電圧ucを印加する。
Claims (55)
- 共鳴リニアコンプレッサ(100)のピストン(1)を制御するための制御システムであって、前記共鳴リニアコンプレッサ(100)は冷却回路の主要部分であり、且つ、少なくとも1個のシリンダ(2)と、少なくとも1個のヘッド(3)と、少なくとも1個の電気モータと、少なくとも1個のスプリングを備え、前記シリンダ(2)は前記ピストン(1)を動作可能に連結して収容する、前記制御システムにおいて、
前記制御システムは、互いに関連する少なくとも1個の観測電子回路(20)と少なくとも1個の制御回路(30)を備える、少なくとも1個の電子制御ユニット(15)を備えることを特徴とし、
前記電子制御ユニット(15)は前記共鳴リニアコンプレッサ(100)の電気モータに電気的に接続され、
前記観測電子回路(20)は前記共鳴リニアコンプレッサ(100)の電気モータの少なくとも1個の電気量を測定するように構成されており、
前記観測電子回路(20)は前記共鳴リニアコンプレッサ(100)の前記モータの少なくとも1セットの電気パラメータと、前記共鳴リニアコンプレッサ(100)の少なくとも1セットの機械パラメータを推定するように構成され、
前記観測電子回路(20)は、前記測定された電気量と推定された電気および機械パラメータセットとから、前記制御回路(30)のためのシステムの少なくとも1個の制御パラメータ(Pc)を推定し提供するように構成されており、
前記制御回路(30)は、前記推定された制御パラメータ(Pc)から前記共鳴リニアコンプレッサ(100)の前記電気モータを起動するように構成されており、前記推定された制御パラメータ(Pc)は前記コンプレッサ(100)のピストン(1)の少なくとも1個の最大変位(DMAX)を備えることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。 - 請求項1に記載のシステムにおいて、前記推定された制御パラメータ(Pc)はさらに、前記コンプレッサ(100)のピストン速度(Ve(t))を含み、前記制御回路(30)は前記システムの前記推定された制御パラメータ(Pc)から前記共鳴リニアコンプレッサ(100)の前記モータを起動することを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 請求項1または2に記載のシステムにおいて、前記電気パラメータのセットは、前記共鳴リニアコンプレッサ(100)の電気数学モデルから計算され、前記共鳴リニアコンプレッサ(100)の電気数学モデルは、電源に直列な電気回路RLに基づいて定義され、且つ、式
- 請求項1または2に記載のシステムにおいて、前記機械パラメータのセットは、共鳴リニアコンプレッサ(100)の機械数学モデルから計算され、共鳴リニアコンプレッサ(100)の機械数学モデルは以下の式
- 請求項1または2に記載のシステムにおいて、前記電気パラメータのセットと前記機械パラメータのセットは、結合された場合、以下の行列式
- 請求項5に記載のシステムにおいて、前記電気機械的パラメータのセットは、共鳴リニアコンプレッサ(100)の電気機械的数学モデルから計算され、このリニアコンプレッサ(100)の前記電気機械的数学モデルは前記行列式に基づいて定義され、前記制御システムには、利得ベクトル(K)が乗算された観測器の電流誤差(ieo)が再度供給され、前記観測器の電流誤差(ieo)は測定された電流(im)とモータの計算電流(ie(t))との間の差によって計算され、前記測定された電流(i m )は、前記共鳴リニアコンプレッサ(100)のモータの動作電流値であり、前記共鳴リニアコンプレッサ(100)の前記電気機械的数学モデルは、以下の式、
- 請求項1に記載のシステムにおいて、共鳴リニアコンプレッサ(100)の前記電気モータは、前記リニアコンプレッサ(100)の各動作サイクル(TR)において計算された共鳴周波数(FR)で、制御ユニット(15)を介して起動されることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 請求項7に記載のシステムにおいて、前記動作サイクル(TR)は測定された電流(im)を介して測定され、且つ前記測定された電流(im)と同じ期間を有するように計算され、前記測定された電流(i m )は、前記共鳴リニアコンプレッサ(100)のモータの動作電流値であることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 請求項1に記載のシステムにおいて、前記観測電子回路(20)は、マイクロプロセッサベースの電子回路から構成されることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 請求項7に記載のシステムにおいて、前記リニアコンプレッサ(100)の前記モータの計算電流(ie(t))、ピストン変位(de(t))およびピストン速度(Ve(t))は、前記共鳴周波数(FR)よりも実質的に高い離散化周波数(Fd)で計算されることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 請求項1、5および10の何れか1項に記載のシステムにおいて、前記最大変位(DMAX)は、1動作サイクル(TR)間における前記ピストン変位(de(t))から計算されることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 請求項7に記載のシステムにおいて、前記機械パラメータのセットは、各動作サイクル(TR)において計算されることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 請求項1に記載のシステムにおいて、前記共鳴リニアコンプレッサ(100)の起動は、動作電圧(ue)に基づいて計算され、この動作電圧(ue)は、最大変位(DMAX)の計算値およびピストン(1)の変位速度(Ve(t))の計算値に基づいて計算され、これらの値は状態制御器を介して基準値と比較されることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 請求項6に記載のシステムにおいて、前記電気機械パラメータのセットは前記シリンダ内のガス圧力FGd(t)を含み、このガス圧力FGd(t)は、式
- 請求項14に記載のシステムにおいて、合計スプリング係数(KMLT)は、スプリング定数と第2のスプリング定数の和、
- 請求項15に記載のシステムにおいて、前記合計スプリング係数(KMLT)は、式
FR=共鳴周波数を示すことを特徴とする、共鳴リニアコンプレッサのピストン制御システム。 - 請求項4または15に記載のシステムにおいて、スプリング力は、式
- 請求項14に記載のシステムにおいて、合計減衰係数(KAMT)は、減衰係数と第2の減衰定数の和、
- 請求項18に記載のシステムにおいて、前記合計減衰係数(KAMT)は、
m)計算された入力電力(Pe)が、合計減衰(PAMT)によって消費された電力と消費電力(PR)との和よりも大きい場合、合計減衰係数(KAMT)の値を次の動作サイクル(TR)まで増加させ、
n)計算された入力電力(Pe)が、合計減衰(PAMT)によって消費された電力と消費電力(PR)との和よりも小さい場合、合計減衰係数(KAMT)の値を次の動作サイクル(TR)まで減少させることにより、計算されることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。 - 請求項18に記載のシステムにおいて、前記合計減衰係数(KAMT)は、式、
PE=実際の入力電力、
PR=モータの抵抗において消費された電力
DMAX=最大ピストン変位、をそれぞれ示すことを特徴とする、共鳴リニアコンプレッサのピストン制御システム。 - 請求項4または18に記載のシステムにおいて、減衰力は、式
- 請求項5、6、17および18の何れか1項に記載のシステムにおいて、前記システムの動的行列式Aは、式、
- 請求項15または18に記載のシステムにおいて、第1の係数行列(A)、第2の係数行列(B)、第3の係数行列(F)および利得ベクトル(K)は、共鳴リニアコンプレッサ(100)の1動作サイクル(TR)において、合計スプリング係数(KMLT)および合計減衰係数(KAMT)から調整されることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 請求項14に記載のシステムにおいて、等価連続力(FCont)は、前記電気モータ上の実際の入力電力(Pe)の関数としてさらに動作サイクル(TR)の関数として計算されることを特徴とする、共鳴リニアコンプレッサのピストン制御システム。
- 共鳴リニアコンプレッサのピストンの制御方法であって、少なくとも1個の電気モータを含み、当該電気モータは周波数インバータによって起動される共鳴リニアコンプレッサ(100)を制御するために、
a)共鳴リニアコンプレッサ(100)の各動作サイクル(TR)において、離散化周波数(Fd)で、電気モータの測定電流(im)を測定し、
b)電気モータの測定電流(im)から共鳴リニアコンプレッサ(100)の動作サイクル(TR)を計算し、そして、計算された動作サイクル(TR)に基づいて、共鳴リニアコンプレッサ(100)の共鳴周波数(FR)を計算し、
c)共鳴リニアコンプレッサ(100)の各動作サイクル(TR)で、かつ、離散化周波数(Fd)で、モータの計算電流(ie(t))、ピストン変位(de(t))及びピストン速度(Ve(t))を計算し、
d)共鳴リニアコンプレッサ(100)の各動作サイクル(TR)で、且つ、離散化周波数(Fd)で、モータの測定電流(im)と計算電流(ie(t))間の相違によって計算される観測器の電流誤差(ieo)を計算し、
e)ステップc)で計算されたピストン変位(de(t))に基づいて、共鳴リニアコンプレッサ(100)のピストン(1)の最大変位(DMAX)を計算し、
f)測定電流(im)と電気モータのインバータによって印加された動作電圧(uc)から、1動作サイクル(TR)における電気モータへの実際の入力電力(Pe)を計算し、
g)測定電流(im)から、1動作サイクル(TR)においてモータの電気抵抗(R)で消費された電力(PR)を計算し、
h)1動作サイクル(TR)で生成された合計減衰力(FAMT)を、合計減衰係数(KAMT)とステップc)で計算されたピストン速度(Ve(t))から計算し、
i)先行するステップで計算された合計減衰力(FAMT)と、ステップc)で計算されたピストン速度(Ve(t))から、合計減衰(PAMT)によって消費された電力を計算し、
j)ステップf)において計算された電気モータにおける実際の入力電力(Pe)の関数として、および、ステップb)で計算された動作サイクル(TR)の関数として、等価連続力(FCont)を計算し、
k)最大ピストン変位(DMAX)およびピストン速度(Ve(t))から、および測定電流(im)から、リニアコンプレッサ(100)の電気モータに印加される動作電圧値(uc)を計算し、さらに、
l)ステップk)で計算された動作電圧値(uc)を共鳴リニアコンプレッサ(100)の電気モータに印加する、各ステップを備える、共鳴リニアコンプレッサのピストンの制御方法。 - 請求項25に記載の方法において、ステップb)で計算された共鳴周波数(RF)から、共鳴リニアコンプレッサ(100)の合計スプリング係数(KMLT)を計算するためのステップを含むことを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。
- 請求項25に記載の方法において、合計スプリング係数(KMLT)は、式
FR=共鳴周波数
であることを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。 - 請求項25に記載の方法において、共鳴リニアコンプレッサ(100)の合計減衰係数(KAMT)を、実際の入力電力(Pe)と消費電力(PR)と合計減衰(PAMT)によって消費された電力とから計算するステップをさらに含むことを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。
- 請求項25に記載の方法において、
m)計算された入力電力(Pe)が、合計減衰(PAMT)によって消費された電力と消費電力(PR)の合計よりも大きい場合、合計減衰係数(KAMT)の値を次の動作サイクル(TR)に増加させ、
n)計算された入力電力(Pe)が、合計減衰(PAMT)によって消費された電力と消費電力(PR)の合計よりも小さい場合、合計減衰係数(KAMT)の値を次の動作サイクル(TR)に減少させる、各ステップをさらに含むことを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。 - 請求項25に記載の方法において、前記合計減衰係数(KAMT)は、式、
- 請求項25乃至30のいずれか1項に記載の方法において、第1の係数行列(A)、第2の係数行列(B)、第3の係数行列(F)および利得ベクトル(K)は、共鳴リニアコンプレッサ(100)の1動作サイクル(TR)において、合計スプリング係数(KMLT)および合計減衰係数(KAMT)から調整されることを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。
- 請求項25に記載の方法において、前記共鳴リニアコンプレッサ(100)の電気数学モデルは、電源に直列な電気回路RLに基づいて定義され、且つ、式
- 請求項25に記載の方法において、リニアコンプレッサ(100)の機械数学モデルは式
- 請求項25に記載の方法において、式、
- 請求項25に記載の方法において、共鳴リニアコンプレッサ(100)の電気機械的数学モデルには、利得ベクトル(K)が乗算された観測器の電流誤差(ieo)が再度供給され、前記観測器の電流誤差(ieo)は測定電流(im)とモータの計算電流(ie(t))との間の差によって計算され、共鳴リニアコンプレッサ(100)の前記電気機械的数学モデルは、以下の式、
- 請求項33乃至35の何れか1項に記載の方法において、シリンダ内のガス圧力FG(d(t))は、式
KMLEq=第2スプリング定数
KAMEq=第2減衰定数
FCont=等価連続力、
をそれぞれ示すことを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。 - 請求項27に記載の方法において、合計減衰係数(KMLT)は、スプリング定数と第2スプリング定数の和として定義され、式
- 請求項33または37に記載の方法において、スプリング力は、式
- 請求項25に記載の方法において、合計減衰係数(KAMT)は、減衰定数と第2の減衰定数の和として定義され、式
- 請求項33または39に記載の方法において、合計減衰力は式
- 請求項33、37、38および39の何れか1項に記載の方法において、前記システムの動的行列(A)は、式
- 請求項25または29に記載の方法において、
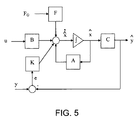
o)ステップe)で計算されたピストンの最大変位(DMAX)をプログラムされた基準変位(DREF)と比較することによって、第1基準電流(I1ref)を調整し、
p)ステップc)で計算されたピストン速度(Ve(t))を、第1の調整された基準電流(I1ref)に掛け合わせることによって、第2の基準電流(i2ref)を調整し、
q)第2の基準電流(i2ref)と測定電流(im)間の相違によって、制御電流誤差(ice)を調整し、
r)先行するステップにおいて計算された制御電流誤差(ice)から電気モータの周波数インバータに印加される動作電圧(uc)を調整する、各ステップをさらに含むことを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。 - 請求項42に記載の方法において、第1の基準電流(I1ref)は、第1の比例および積分状態制御器(PI1)または微分比例積分状態制御器の出力において生成されることを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。
- 請求項42に記載の方法において、電気モータのインバータに印加される動作電圧(uc)は、第2の比例および積分状態制御器(PI2)または微分比例積分状態制御器の出力において生成されることを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。
- 周波数インバータによって電気的に起動される少なくとも1個の電気モータを含む、共鳴リニアコンプレッサのピストンの制御方法において、
i)マイクロプロセッサベースの電子回路と、共鳴リニアコンプレッサ(100)の動作サイクル(TR)から、離散化周波数で、電気モータの測定電流(im)を測定し、
ii)測定電流(im)と電気モータのインバータに印加された動作電圧(uc)とに基づいて、前記モータの電気パラメータの少なくとも1セットと、リニアコンプレッサ(100)の機械パラメータの少なくとも1セットとを計算し、
iii)ステップi)およびii)において測定され計算された値に基づいて、共鳴リニアコンプレッサ(100)の最大変位(DMAX)とピストン速度(Ve(t))を計算し、
iv)ステップiii)で得られた最大変位(DMAX)とピストン速度(Ve(t))から、リニアコンプレッサ(100)の電気モータのインバータに印加されるべき動作電圧(uc)の新しい値を調整し、さらに、
v)共鳴リニアコンプレッサ(100)の電気モータのインバータに、ステップiv)で調整された動作電圧(uc)を印加する、各ステップを含むことを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。 - 請求項45に記載の方法において、動作電圧(uc)の値は共鳴リニアコンプレッサ(100)の1動作サイクル(TR)において計算され、前記動作サイクル(TR)は共鳴周波数(RF)において前記共鳴リニアコンプレッサ(100)の動作を定義することを特徴とする、共鳴リニアコンプレッサのピストンの制御方法。
- 請求項45に記載の方法において、電気パラメータのセットは共鳴リニアコンプレッサ(100)の電気数学モデルから計算されること特徴とする、共鳴リニアコンプレッサのピストンの制御方法。
- 請求項45に記載の方法において、機械パラメータのセットは共鳴リニアコンプレッサ(100)の機械数学モデルから計算されること特徴とする、共鳴リニアコンプレッサのピストンの制御方法。
- 請求項45に記載の方法において、共鳴リニアコンプレッサ(100)の数学的電気機械モデルは電気および機械パラメータセットに基づいて定義されること特徴とする、共鳴リニアコンプレッサのピストンの制御方法。
- 請求項45に記載の方法において、共鳴リニアコンプレッサ(100)の数学的電気モデルは、電源に直列な電気回路RLに基づいて定義され、式
- 請求項45に記載の方法において、リニアコンプレッサ(100)の前記機械数学モデルは、質量/スプリング機械システムに基づいて定義され、当該システムは、式
- 請求項49に記載の方法において、リニアコンプレッサ(100)の電気機械的数学モデルは、電気機械システムに基づいて定義され、当該システムは、行列式
- 請求項49に記載の方法において、リニアコンプレッサ(100)の電気機械的数学モデルには、利得ベクトル(K)を乗算した観測器の電流誤差(ieo)が再び供給され、当該観測器の電流誤差(ieo)は測定電流(im)と計算モータ電流(ie(t))との間の差によって計算され、共鳴リニアコンプレッサ(100)の電気機械的数学モデルは、式
- 請求項51乃至53の何れか1項に記載の方法において、前記シリンダ内のガス−圧力FG(d(t))は、式
- 請求項25乃至53の何れか1項または請求項45乃至54の何れか1項に記載の方法において定義されるピストンの制御方法を含む、共鳴リニアコンプレッサ(100)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| BRPI1001388-1 | 2010-05-05 | ||
| BRPI1001388-1A BRPI1001388A2 (pt) | 2010-05-05 | 2010-05-05 | sistema de controle para pistço de compressor linear ressonante, mÉtodo de controle para pistço de compressor linear ressonante e compressor linear ressonante |
| PCT/BR2011/000131 WO2011137501A2 (pt) | 2010-05-05 | 2011-05-05 | Sistema de controle para pistão de compressor linear ressonante, método de controle para pistão de compressor linear ressonante e compressor linear ressonante |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013525688A JP2013525688A (ja) | 2013-06-20 |
| JP2013525688A5 JP2013525688A5 (ja) | 2015-09-10 |
| JP5873075B2 true JP5873075B2 (ja) | 2016-03-01 |
Family
ID=44511708
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013508333A Expired - Fee Related JP5873075B2 (ja) | 2010-05-05 | 2011-05-05 | 共鳴リニアコンプレッサのピストンの制御システム、共鳴リニアコンプレッサのピストンの制御方法および共鳴リニアコンプレッサ |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US9518578B2 (ja) |
| EP (1) | EP2568179B1 (ja) |
| JP (1) | JP5873075B2 (ja) |
| KR (1) | KR20130090319A (ja) |
| CN (1) | CN102884321B (ja) |
| BR (1) | BRPI1001388A2 (ja) |
| DK (1) | DK2568179T3 (ja) |
| ES (1) | ES2557464T3 (ja) |
| WO (1) | WO2011137501A2 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BR102012015252A2 (pt) * | 2012-06-20 | 2014-07-29 | Whirlpool Sa | Método de acionamento elétrico de motor linear |
| US9086062B2 (en) | 2012-09-13 | 2015-07-21 | General Electric Company | Linear compressor with an electro-magnetic spring |
| US8714946B2 (en) | 2012-09-13 | 2014-05-06 | General Electric Company | Linear compressor with an electro-magnetic spring |
| KR102115247B1 (ko) * | 2013-12-19 | 2020-05-26 | 엘지전자 주식회사 | 리니어 압축기 제어 장치 및 제어 방법 |
| CN105099329B (zh) * | 2014-05-19 | 2018-04-06 | 罗克韦尔自动化技术公司 | 准变频电机控制器 |
| AT515819B1 (de) * | 2014-06-10 | 2016-02-15 | Seh Ltd | Verfahren zur Steuerung der Polung eines Magnetantriebes |
| US20160215770A1 (en) * | 2015-01-28 | 2016-07-28 | General Electric Company | Method for operating a linear compressor |
| US10208741B2 (en) | 2015-01-28 | 2019-02-19 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US10502201B2 (en) | 2015-01-28 | 2019-12-10 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US9912276B2 (en) * | 2015-08-28 | 2018-03-06 | Semiconductor Components Industries, Llc | Method of forming a semiconductor device and structure therefor |
| US10174753B2 (en) | 2015-11-04 | 2019-01-08 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US9890778B2 (en) * | 2015-11-04 | 2018-02-13 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| JP6764751B2 (ja) * | 2016-10-14 | 2020-10-07 | 日立オートモティブシステムズ株式会社 | リニア圧縮機及びこれを搭載した機器 |
| CN107035584B (zh) * | 2016-11-11 | 2019-06-28 | 安徽江淮汽车集团股份有限公司 | 一种油泵泵芯支架 |
| US10830230B2 (en) | 2017-01-04 | 2020-11-10 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| KR20180085316A (ko) * | 2017-01-18 | 2018-07-26 | 엘지전자 주식회사 | 리니어 압축기의 제어 장치 |
| CN107218206B (zh) * | 2017-06-30 | 2019-01-18 | 青岛海尔智能技术研发有限公司 | 直线压缩机气缸变容积的控制方法 |
| US10641263B2 (en) | 2017-08-31 | 2020-05-05 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US10670008B2 (en) | 2017-08-31 | 2020-06-02 | Haier Us Appliance Solutions, Inc. | Method for detecting head crashing in a linear compressor |
| KR101948567B1 (ko) * | 2017-10-10 | 2019-05-08 | 엘지전자 주식회사 | 리니어 압축기의 제어 장치 및 리니어 압축기의 제어 방법 |
| CN108334659B (zh) * | 2017-12-26 | 2020-06-16 | 浙江大学 | 一种线性压缩机中活塞位移相对于压力波相角的校准方法 |
| CN111564995B (zh) * | 2020-05-25 | 2021-11-19 | 华中科技大学 | 一种基于自适应全阶位移观测器的直线振荡电机控制方法 |
| US11460325B2 (en) | 2020-07-02 | 2022-10-04 | Global Cooling, Inc. | Method for and control system with piston amplitude recovery for free-piston machines |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4642547A (en) | 1985-08-19 | 1987-02-10 | Sunpower, Inc. | Adaptive regulation system for a linear alternator driven by a free-piston stirling engine |
| US5342176A (en) | 1993-04-05 | 1994-08-30 | Sunpower, Inc. | Method and apparatus for measuring piston position in a free piston compressor |
| KR960015062A (ko) | 1994-10-13 | 1996-05-22 | 이대원 | 광량제어가 가능한 플래쉬를 갖춘 카메라 |
| KR960015062U (ko) | 1994-10-20 | 1996-05-17 | 가스레인지의 그릴구조 | |
| JPH09137781A (ja) * | 1995-11-15 | 1997-05-27 | Matsushita Refrig Co Ltd | 振動型圧縮機 |
| US5772355A (en) | 1996-12-19 | 1998-06-30 | Precision Optics Corporation | Quick attach/release adapter mechanism |
| KR100237562B1 (ko) | 1996-12-31 | 2000-01-15 | 구자홍 | 리니어 컴프레서 구동회로 |
| JP3469779B2 (ja) | 1998-05-22 | 2003-11-25 | 三洋電機株式会社 | リニアモータ駆動往復機構の制御装置 |
| DE19918930B4 (de) | 1999-04-26 | 2006-04-27 | Lg Electronics Inc. | Leistungssteuervorrichtung für einen Linearkompressor und ebensolches Verfahren |
| CA2374351A1 (en) | 1999-06-21 | 2000-12-28 | Fisher & Paykel Limited | Linear motor |
| BR0001404A (pt) | 2000-03-23 | 2001-11-13 | Brasil Compressores Sa | Sensor de posição e compressor |
| CN1247896C (zh) * | 2000-11-29 | 2006-03-29 | Lg电子株式会社 | 控制线性压缩机的设备和方法 |
| US6537034B2 (en) * | 2000-11-29 | 2003-03-25 | Lg Electronics Inc. | Apparatus and method for controlling operation of linear compressor |
| GB0109643D0 (en) * | 2001-04-19 | 2001-06-13 | Isis Innovation | System and method for monitoring and control |
| JP3511018B2 (ja) * | 2001-05-18 | 2004-03-29 | 松下電器産業株式会社 | リニアコンプレッサ駆動装置 |
| BRPI0113565B1 (pt) * | 2001-06-21 | 2016-07-26 | Lg Electronics Inc | aparelho e método para controlar a posição de pistão em compressor de movimento alternativo |
| US6682310B2 (en) | 2001-08-01 | 2004-01-27 | Lg Electronics Inc. | Apparatus and method for controlling operation of reciprocating motor compressor |
| NZ515578A (en) | 2001-11-20 | 2004-03-26 | Fisher & Paykel Appliances Ltd | Reduction of power to free piston linear motor to reduce piston overshoot |
| JP2003339188A (ja) * | 2002-05-21 | 2003-11-28 | Matsushita Electric Ind Co Ltd | リニアモータの駆動装置 |
| BR0203724B1 (pt) | 2002-09-12 | 2011-08-09 | bomba de fluidos e placa de transferência de fluidos e sensor indutivo para bomba de fluidos. | |
| BR0300010B1 (pt) * | 2003-01-08 | 2012-05-02 | sistema de controle de um compressor linear, método de controle de um compressor linear, compressor linear e sistema de refrigeração. | |
| JP2004336988A (ja) * | 2003-04-14 | 2004-11-25 | Matsushita Electric Ind Co Ltd | モータ駆動装置 |
| BR0302419B1 (pt) * | 2003-07-15 | 2011-09-06 | método de controle de movimento de um motor elétrico, sistema de controle de movimentação de um motor elétrico e compressor. | |
| KR100941422B1 (ko) * | 2003-08-04 | 2010-02-10 | 삼성전자주식회사 | 리니어 압축기 및 그 제어 장치 |
| BRPI0504989A (pt) * | 2005-05-06 | 2006-12-19 | Lg Electronics Inc | aparelho e método para controlar operação de compressor de alternáncia |
| JP5018357B2 (ja) * | 2007-09-05 | 2012-09-05 | アイシン精機株式会社 | リニア圧縮装置およびその制御方法 |
| KR100963742B1 (ko) * | 2007-10-24 | 2010-06-14 | 엘지전자 주식회사 | 왕복동식 압축기 |
| BRPI0800251B1 (pt) * | 2008-02-22 | 2021-02-23 | Embraco Indústria De Compressores E Soluções Em Refrigeração Ltda | sistema e método de controle de compressor linear |
-
2010
- 2010-05-05 BR BRPI1001388-1A patent/BRPI1001388A2/pt not_active Application Discontinuation
-
2011
- 2011-05-05 EP EP11738584.9A patent/EP2568179B1/en not_active Not-in-force
- 2011-05-05 DK DK11738584.9T patent/DK2568179T3/en active
- 2011-05-05 CN CN201180022529.8A patent/CN102884321B/zh not_active Expired - Fee Related
- 2011-05-05 ES ES11738584.9T patent/ES2557464T3/es active Active
- 2011-05-05 KR KR1020127024162A patent/KR20130090319A/ko not_active Application Discontinuation
- 2011-05-05 WO PCT/BR2011/000131 patent/WO2011137501A2/pt active Application Filing
- 2011-05-05 JP JP2013508333A patent/JP5873075B2/ja not_active Expired - Fee Related
- 2011-05-05 US US13/696,253 patent/US9518578B2/en active Active
-
2016
- 2016-10-12 US US15/291,613 patent/US9915260B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9518578B2 (en) | 2016-12-13 |
| EP2568179B1 (en) | 2015-10-07 |
| CN102884321B (zh) | 2016-09-07 |
| KR20130090319A (ko) | 2013-08-13 |
| DK2568179T3 (en) | 2016-01-04 |
| WO2011137501A3 (pt) | 2012-07-05 |
| US9915260B2 (en) | 2018-03-13 |
| ES2557464T3 (es) | 2016-01-26 |
| JP2013525688A (ja) | 2013-06-20 |
| BRPI1001388A2 (pt) | 2011-12-27 |
| WO2011137501A2 (pt) | 2011-11-10 |
| US20130189119A1 (en) | 2013-07-25 |
| US20170030345A1 (en) | 2017-02-02 |
| CN102884321A (zh) | 2013-01-16 |
| EP2568179A2 (en) | 2013-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5873075B2 (ja) | 共鳴リニアコンプレッサのピストンの制御システム、共鳴リニアコンプレッサのピストンの制御方法および共鳴リニアコンプレッサ | |
| JP6591954B2 (ja) | 共振リニアコンプレッサーの制御方法と冷却システムに適用される共振リニアコンプレッサーの電子制御システム | |
| US10697444B2 (en) | Actuation system for a resonant linear compressor, method for actuating a resonant linear compressor, and resonant linear compressor | |
| US9306486B2 (en) | System and method for controlling the stroke and operation at resonance frequency of a resonant linear motor | |
| CN106337793B (zh) | 用于保护共振式线性压缩机的方法及系统 | |
| JP2013531764A6 (ja) | 共振リニアコンプレッサーの制御方法と冷却システムに適用される共振リニアコンプレッサーの電子制御システム | |
| JP2013525688A5 (ja) | ||
| JP2006515738A (ja) | リニアコンプレッサ制御システム、リニアコンプレッサの制御方法、リニアコンプレッサおよび冷却システム | |
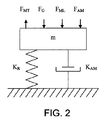
| Lilie | FMT FG FML FAM |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140416 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150303 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150428 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20150724 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5873075 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |