JP5844814B2 - 遊星ギアシステムを備える手術器具 - Google Patents
遊星ギアシステムを備える手術器具 Download PDFInfo
- Publication number
- JP5844814B2 JP5844814B2 JP2013536830A JP2013536830A JP5844814B2 JP 5844814 B2 JP5844814 B2 JP 5844814B2 JP 2013536830 A JP2013536830 A JP 2013536830A JP 2013536830 A JP2013536830 A JP 2013536830A JP 5844814 B2 JP5844814 B2 JP 5844814B2
- Authority
- JP
- Japan
- Prior art keywords
- output shaft
- planetary gear
- shaft
- distal end
- gear system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
- A61B17/8875—Screwdrivers, spanners or wrenches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7074—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling
- A61B17/7076—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling for driving, positioning or assembling spinal clamps or bone anchors specially adapted for spinal fixation
- A61B17/7082—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling for driving, positioning or assembling spinal clamps or bone anchors specially adapted for spinal fixation for driving, i.e. rotating, screws or screw parts specially adapted for spinal fixation, e.g. for driving polyaxial or tulip-headed screws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
- A61B17/8875—Screwdrivers, spanners or wrenches
- A61B17/8877—Screwdrivers, spanners or wrenches characterised by the cross-section of the driver bit
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B15/00—Screwdrivers
- B25B15/001—Screwdrivers characterised by material or shape of the tool bit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B17/00—Hand-driven gear-operated wrenches or screwdrivers
- B25B17/02—Hand-driven gear-operated wrenches or screwdrivers providing for torque amplification
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
- A61B17/8875—Screwdrivers, spanners or wrenches
- A61B17/8894—Screwdrivers, spanners or wrenches holding the implant into or through which the screw is to be inserted
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/031—Automatic limiting or abutting means, e.g. for safety torque limiting
Landscapes
- Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Neurology (AREA)
- Public Health (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Surgical Instruments (AREA)
- Retarders (AREA)
- Manipulator (AREA)
- Transmission Devices (AREA)
- Prostheses (AREA)
Description
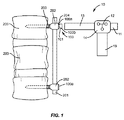
(態様1)回転力を構造要素に適用する手術器具であって、収容部と、前記収容部の中に一部が位置し、且つ、当該収容部から外側に延在する入力部分を備える入力部材であって、当該収容部に対して回転可能であり、更に太陽ギアを備える入力部材と、
前記収容部の中に一部が位置し、且つ、当該収容部から外側に延在する長さを有し、並びに、前記要素と係合するように構成されたレセプタクルを備える細長い出力軸であって、当該収容部に対して回転可能である細長い出力軸と、前記収容部に位置し、前記太陽ギアと係合して当該太陽ギアの周囲を回転する複数の遊星ギアと、当該太陽ギアおよび当該複数の遊星ギアの周囲に延在し、当該複数の遊星ギアと係合する内部歯部を備える円環リングギアと、を備える遊星ギアシステムであって、当該複数の遊星ギアは当該収容部に対して回転可能であり、且つ、当該円環リングギアが当該収容部に対して回転不可能である、遊星ギアシステムと、を備え、前記入力部材、前記出力軸、および、前記遊星ギアシステムは、第1の回転方向への当該入力部材の回転に対して動作可能に結合し、結果として、当該第1の回転方向へ当該出力軸が回転する、手術器具。
(態様2)態様1の手術器具において、前記遊星ギアシステムと前記出力軸との間の前記収容部に位置する付勢部材を更に備え、前記付勢部材は、前記遊星ギアシステムから離れた前記出力軸を押しつける、手術器具。
(態様3)態様2の手術器具において、前記出力軸は、前記遊星ギアシステムから空間的に離れた当該出力軸の近位端の第1の位置、および、当該遊星ギアシステムに空間的に近接する当該近位端の第2の位置から、前記収容部に対して軸方向に移動可能である、手術器具。
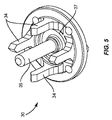
(態様4)態様2の手術器具において、前記遊星ギアシステムは、前記複数の遊星ギアの中央開口部に適合する柱部であって軸方向に延在する柱部を備える第1の側面、および、前記出力軸のギアと係合する指状部出逢って軸方向に延在する指状部を備える第2の側面を有する駆動板を具備する、手術器具。
(態様5)態様4の手術器具において、前記第2の側面は、前記指状部の間に位置し、前記付勢部材の中央セクション内に位置し、軸方向に延在する柱部を更に備える、手術器具。
(態様6)態様4の手術器具において、前記駆動板は、前記収容部に対して回転可能である、手術器具。
(態様7)態様1の手術器具において、前記太陽ギアは、前記入力部材の遠位端に位置する、手術器具。
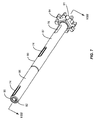
(態様8)態様1の手術器具において、前記出力軸を超えて延在する外側軸を更に備え、前記外側軸は、前記収容部に固定され、当該収容部に対して当該外側軸が回転することを防止し、および、当該収容部に対して当該外側軸が軸方向に運動することを防止する、手術器具。
(態様9)態様1の手術器具において、前記出力軸は、中空内部を備え、前記レセプタクルは、前記中空内部に形成される、手術器具。
(態様10)回転力を構造要素に適用する手術器具であって、前記手術器具は、縦軸に沿って延在する細長い形状を有し、前記手術器具は、前記縦軸に並ぶ細長い入力部材であって、第1の歯部を有する太陽ギアを備える遠位端と対向する近位端とを具備する細長い入力部材と、前記入力部材の前記遠位端に位置する駆動部材であって、当該入力部材に対向する取り付け具、および、当該入力部材から外側に離れて対向する指状部を備え、当該取り付け具および当該指状部のそれぞれが前記縦軸から放射状に位置する、駆動部材と、
前記駆動部材に取り付けられる遊星ギアであって、当該遊星ギアのそれぞれが前記太陽ギアの前記第1の歯部と嵌合する第2の歯部を備え、当該遊星ギアのそれぞれが前記取り付け具の1つに取り付けられて当該遊星ギアが当該駆動部材に対して回転すると共に、当該駆動部材の固定点に留まり当該遊星ギアのそれぞれが前記縦軸から放射状に位置する、遊星ギアと、前記遊星ギアの前記第2の歯部と係合する第3の歯部を備えた内側表面を有する円環形状のリングギアと、前記縦軸と並ぶ出力部材であって、第1の端部と第2の端部とを有する細長い形状を備え、当該第1の端部が前記駆動部材の前記指状部を受容する間隙によって空間を隔てて離れるアームを備え、当該第2の端部が前記要素と係合するように構成される取り付け具を備える、出力部材と、を具備し、前記入力部材、前記駆動部材、および前記出力部材は、第1の回転方向への当該入力部材の回転に対して動作可能に結合し、結果として、当該第1の回転方向と同一方向に当該出力部材が回転する、器具。
(態様11)態様10の器具において、前記遊星ギアおよび前記リングギアの周囲に延在する収容部をさらに備え、前記入力部材の前記遠位端は、前記収容部内に位置し、前記入力部材の前記近位端は、前記収容部から外側へ離れるように位置する、器具。
(態様12)態様10の器具において、前記出力部材から離れるように前記駆動部材を付勢する付勢部材をさらに備える、器具。
(態様13)態様12の器具において、前記付勢部材は、前記縦軸の周囲に位置する、器具。
(態様14)態様12の器具において、前記出力部材は、前記縦軸に沿って軸方向に移動可能である、器具。
Claims (1)
- 回転力を構造要素に適用する手術器具であって、
収容部と、
前記収容部の中に一部が位置し、且つ、当該収容部から外側に延在する入力部分を備える入力部材であって、当該収容部に対して回転可能であり、更に太陽ギアを備える入力部材と、
前記収容部の中に一部が位置し、且つ、当該収容部から外側に延在する長さを有し、並びに、前記要素と係合するように構成されたレセプタクルを備える細長い出力軸であって、当該収容部に対して回転可能である細長い出力軸と、
前記収容部に位置し、前記太陽ギアと係合して当該太陽ギアの周囲を回転する複数の遊星ギアと、当該太陽ギアおよび当該複数の遊星ギアの周囲に延在し、当該複数の遊星ギアと係合する内部歯部を備える円環リングギアと、を備える遊星ギアシステムであって、当該複数の遊星ギアは当該収容部に対して回転可能であり、且つ、当該円環リングギアが当該収容部に対して回転不可能である、遊星ギアシステムと、
を備え、
前記入力部材、前記出力軸、および、前記遊星ギアシステムは、第1の回転方向への当該入力部材の回転に対して動作可能に結合し、結果として、当該第1の回転方向へ当該出力軸が回転し、
前記遊星ギアシステムと前記出力軸との間の前記収容部に位置する付勢部材を更に備え、前記付勢部材は、前記遊星ギアシステムから離れるように前記出力軸を押しつけ、
前記出力軸は、前記遊星ギアシステムから空間的に離れた当該出力軸の近位端の第1の位置、および、当該遊星ギアシステムに空間的に近接する当該近位端の第2の位置から、前記収容部に対して軸方向に移動可能であり、
前記第1の位置は、前記出力軸の遠位端が該出力軸の外側に延在する外側軸の遠位端を越えて延びる伸長位置であり、前記第2の位置は、前記出力軸の遠位端が前記外側軸の遠位端と揃う、または前記外側軸の遠位端から内側に奥まった収縮位置である、
手術器具。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/915,861 | 2010-10-29 | ||
| US12/915,861 US8696511B2 (en) | 2010-10-29 | 2010-10-29 | Surgical instrument with plantary gear system |
| PCT/US2011/058108 WO2012058439A2 (en) | 2010-10-29 | 2011-10-27 | Surgical instrument with planetary gear system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015160131A Division JP2016000223A (ja) | 2010-10-29 | 2015-08-14 | 遊星ギアシステムを備える手術器具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013544136A JP2013544136A (ja) | 2013-12-12 |
| JP5844814B2 true JP5844814B2 (ja) | 2016-01-20 |
Family
ID=45994763
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013536830A Expired - Fee Related JP5844814B2 (ja) | 2010-10-29 | 2011-10-27 | 遊星ギアシステムを備える手術器具 |
| JP2015160131A Pending JP2016000223A (ja) | 2010-10-29 | 2015-08-14 | 遊星ギアシステムを備える手術器具 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015160131A Pending JP2016000223A (ja) | 2010-10-29 | 2015-08-14 | 遊星ギアシステムを備える手術器具 |
Country Status (8)
| Country | Link |
|---|---|
| US (3) | US8696511B2 (ja) |
| EP (1) | EP2632357B1 (ja) |
| JP (2) | JP5844814B2 (ja) |
| CN (1) | CN103167839B (ja) |
| AU (1) | AU2011319798B2 (ja) |
| ES (1) | ES2676172T3 (ja) |
| TR (1) | TR201809555T4 (ja) |
| WO (1) | WO2012058439A2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8545505B2 (en) * | 2010-01-15 | 2013-10-01 | Pioneer Surgical Technology, Inc. | Low friction rod persuader |
| US8696511B2 (en) * | 2010-10-29 | 2014-04-15 | Warsaw Orthopedic, Inc. | Surgical instrument with plantary gear system |
| EP2489312A1 (en) * | 2011-02-15 | 2012-08-22 | Zimmer Surgical SA | Compact driver for powered surgical tool |
| EP2846865B1 (en) * | 2012-05-09 | 2019-07-24 | Merit Medical Systems, Inc. | Torquer device |
| RS56046B1 (sr) * | 2012-11-12 | 2017-09-29 | Cartiheal (2009) Ltd | Instrumenti i sistemi za implantaciju čvrstih oblika i graftova |
| US9987043B2 (en) | 2014-10-24 | 2018-06-05 | Stryker European Holdings I, Llc | Methods and systems for adjusting an external fixation frame |
| US10368913B2 (en) * | 2015-08-10 | 2019-08-06 | Stryker European Holdings I, Llc | Adjustment instrument with tactile feedback |
| US10349984B2 (en) | 2015-12-23 | 2019-07-16 | Power T Handle, Llc | Multi-mode torque drivers employing anti-backdrive units for managing pedicle screw attachments with vertebrae, and related systems and methods |
| US10874442B2 (en) | 2015-12-23 | 2020-12-29 | Power T Handle, Llc | Multi-mode torque drivers employing inner surfaces compatible with pedicle screw guide wires, and related systems and methods |
| JP7177494B2 (ja) * | 2016-05-19 | 2022-11-24 | アークタス サージカル インク | 脊椎湾曲調整システム |
| US11357529B2 (en) * | 2016-11-17 | 2022-06-14 | Globus Medical, Inc. | Rotary oscillating and reciprocating surgical tool |
| CN108278346A (zh) * | 2018-02-12 | 2018-07-13 | 苏州益诺斯医疗科技有限公司 | 一种医用垂直锯的传动机构 |
| WO2019185104A1 (en) | 2018-03-28 | 2019-10-03 | Elkhawaga Ahmed Mohamed Abou Elainen | The gear dynamic compression plates |
| USD884889S1 (en) | 2018-12-18 | 2020-05-19 | Kevin S. CAHILL | Cannulated pedicle screw torque driver |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3613662A (en) * | 1970-02-27 | 1971-10-19 | Stavro A Chrysostomides | Cold conization instrument |
| US3797497A (en) | 1972-02-28 | 1974-03-19 | Stryker Corp | Drill like driving device |
| US4728876A (en) * | 1986-02-19 | 1988-03-01 | Minnesota Mining And Manufacturing Company | Orthopedic drive assembly |
| US4736742A (en) * | 1986-04-03 | 1988-04-12 | Minnesota Mining And Manufacturing Company | Device for driving tools used in orthopedic surgery |
| US5226906A (en) | 1991-02-13 | 1993-07-13 | Howmedica, Inc. | Surgical speed wrench |
| US5207697A (en) * | 1991-06-27 | 1993-05-04 | Stryker Corporation | Battery powered surgical handpiece |
| US5433721A (en) * | 1992-01-17 | 1995-07-18 | Ethicon, Inc. | Endoscopic instrument having a torsionally stiff drive shaft for applying fasteners to tissue |
| JP2585727Y2 (ja) * | 1992-04-30 | 1998-11-25 | マックス株式会社 | 電動スクリュードライバのクラッチ機構 |
| WO1993025151A1 (en) | 1992-06-12 | 1993-12-23 | Larry Steven Nichter | Wire driver and method |
| JPH06236801A (ja) * | 1993-02-09 | 1994-08-23 | Murata Mfg Co Ltd | 減速ドライバ |
| US6402780B2 (en) * | 1996-02-23 | 2002-06-11 | Cardiovascular Technologies, L.L.C. | Means and method of replacing a heart valve in a minimally invasive manner |
| US5863272A (en) | 1997-03-04 | 1999-01-26 | Atlas Copco Robbins Inc. | Raise drill assembly with two-piece planetary third reduction hub and out put shaft |
| US6171316B1 (en) | 1997-10-10 | 2001-01-09 | Origin Medsystems, Inc. | Endoscopic surgical instrument for rotational manipulation |
| US5993454A (en) | 1998-09-29 | 1999-11-30 | Stryker Corporation | Drill attachment for a surgical drill |
| US6312441B1 (en) * | 1999-03-04 | 2001-11-06 | Stryker Corporation | Powered handpiece for performing endoscopic surgical procedures |
| JP3911905B2 (ja) * | 1999-04-30 | 2007-05-09 | 松下電工株式会社 | インパクト回転工具 |
| DE19956789A1 (de) | 1999-11-25 | 2001-05-31 | Zahnradfabrik Friedrichshafen | Planetengetriebe zum Anbau an einen Elektromotor |
| GB0005897D0 (en) | 2000-03-10 | 2000-05-03 | Black & Decker Inc | Power tool |
| GB0005822D0 (en) | 2000-03-10 | 2000-05-03 | Black & Decker Inc | Coupling mechanism |
| US6602260B2 (en) | 2001-02-02 | 2003-08-05 | Ams Research Corporation | Powered bone screw device |
| JP3685115B2 (ja) | 2001-09-11 | 2005-08-17 | 豊田工機株式会社 | 遊星歯車装置 |
| US6958071B2 (en) * | 2002-07-13 | 2005-10-25 | Stryker Corporation | Surgical tool system |
| DE10255120A1 (de) * | 2002-11-26 | 2004-06-03 | Kaltenbach & Voigt Gmbh & Co. Kg | Ärztlichees oder zahnärztliches Handstück mit mehrstufiger Getriebeanordnung |
| US7296500B1 (en) | 2005-01-15 | 2007-11-20 | Nu Vasive, Inc. | System and method for applying torque to a fastener |
| US7988706B2 (en) * | 2005-04-11 | 2011-08-02 | St. Jude Medical Puerto Rico Llc | Tissue puncture closure device with automatic torque sensing tamping system |
| US7618438B2 (en) | 2005-05-17 | 2009-11-17 | St. Jude Medical Puerto Rico Llc | Tissue puncture closure device with disengagable automatic tamping system |
| CA2612972A1 (en) * | 2005-06-25 | 2007-01-04 | Stryker Corporation | Surgical handpiece with compact clutch and anti-wobble coupling head |
| KR20070056316A (ko) | 2005-11-29 | 2007-06-04 | 엘지.필립스 엘시디 주식회사 | 기판 흡착용 정전척과 이를 이용한 액정표시소자용 기판합착 장치와 기판 합착 방법 |
| US8992422B2 (en) * | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| AU2007238129A1 (en) | 2006-04-11 | 2007-10-25 | Synthes Gmbh | Minimally invasive fixation system |
| US20070270859A1 (en) | 2006-04-28 | 2007-11-22 | Sdgi Holdings, Inc. | Orthopedic screw with break away drive |
| CA2664415C (en) | 2006-10-05 | 2014-12-16 | Tyco Healthcare Group Lp | Flexible endoscopic stitching devices |
| US7455615B2 (en) * | 2007-01-04 | 2008-11-25 | Hsin-Chih Chung Lee | Transmission mechanism |
| US8231635B2 (en) | 2007-01-18 | 2012-07-31 | Stryker Spine | Polyaxial screwdriver for a pedicle screw system |
| US8029523B2 (en) | 2007-03-30 | 2011-10-04 | Innovative Implant Technology, Llc | Maxillary bone cutting system, kit, and method of using the same |
| JP4024291B1 (ja) * | 2007-05-25 | 2007-12-19 | 貴浩 吉田 | レンチ |
| JP5403783B2 (ja) | 2007-10-05 | 2014-01-29 | コヴィディエン リミテッド パートナーシップ | 関節運動メカニズムを有する外科ステープラ |
| GB0806211D0 (en) | 2008-04-04 | 2008-05-14 | Prosurgics Ltd | A clutch mechanism |
| US20090287203A1 (en) * | 2008-05-13 | 2009-11-19 | Boston Scientific Scimed, Inc | Apparatus and Methods for Retracting an Ablation Balloon |
| ES2468890T3 (es) * | 2009-04-07 | 2014-06-17 | Biedermann Technologies Gmbh & Co. Kg | Herramienta utilizable con un anclaje para hueso, en particular para la cirugía vertebral |
| US8696511B2 (en) * | 2010-10-29 | 2014-04-15 | Warsaw Orthopedic, Inc. | Surgical instrument with plantary gear system |
-
2010
- 2010-10-29 US US12/915,861 patent/US8696511B2/en active Active
-
2011
- 2011-10-27 JP JP2013536830A patent/JP5844814B2/ja not_active Expired - Fee Related
- 2011-10-27 AU AU2011319798A patent/AU2011319798B2/en active Active
- 2011-10-27 ES ES11837096.4T patent/ES2676172T3/es active Active
- 2011-10-27 CN CN201180050152.7A patent/CN103167839B/zh active Active
- 2011-10-27 EP EP11837096.4A patent/EP2632357B1/en active Active
- 2011-10-27 WO PCT/US2011/058108 patent/WO2012058439A2/en active Application Filing
- 2011-10-27 TR TR2018/09555T patent/TR201809555T4/tr unknown
-
2014
- 2014-02-06 US US14/174,418 patent/US9402674B2/en active Active
-
2015
- 2015-08-14 JP JP2015160131A patent/JP2016000223A/ja active Pending
-
2016
- 2016-06-24 US US15/192,044 patent/US10357301B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN103167839B (zh) | 2015-06-03 |
| US20160302839A1 (en) | 2016-10-20 |
| CN103167839A (zh) | 2013-06-19 |
| JP2016000223A (ja) | 2016-01-07 |
| US9402674B2 (en) | 2016-08-02 |
| WO2012058439A2 (en) | 2012-05-03 |
| US20140155907A1 (en) | 2014-06-05 |
| AU2011319798A1 (en) | 2013-05-02 |
| JP2013544136A (ja) | 2013-12-12 |
| WO2012058439A3 (en) | 2012-07-05 |
| TR201809555T4 (tr) | 2018-07-23 |
| EP2632357B1 (en) | 2018-05-30 |
| US10357301B2 (en) | 2019-07-23 |
| ES2676172T3 (es) | 2018-07-17 |
| AU2011319798B2 (en) | 2015-06-11 |
| US20120109143A1 (en) | 2012-05-03 |
| US8696511B2 (en) | 2014-04-15 |
| EP2632357A4 (en) | 2015-04-22 |
| EP2632357A2 (en) | 2013-09-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5844814B2 (ja) | 遊星ギアシステムを備える手術器具 | |
| US7766207B2 (en) | Articulating curved cutter stapler | |
| KR102256787B1 (ko) | 내시경 절차를 위한 관절식 장치 | |
| US7549563B2 (en) | Rotating curved cutter stapler | |
| JP6114202B2 (ja) | 組織牽引器および使用方法 | |
| JP3850388B2 (ja) | 脊椎ロッドシステム固定装置 | |
| EP2434973B1 (en) | Surgical instrument for fixing a clamp to a bone fixation device | |
| JP6127131B2 (ja) | 供給する留め具 | |
| US8591519B2 (en) | Surgical instrument with cycloidal gear system | |
| US8784420B2 (en) | Surgical instruments for cutting elongated elements and methods of use | |
| CN106488751A (zh) | 用于张紧用于骨骼的融合、稳定和/或固定的设备的装置 | |
| US10070908B2 (en) | Surgical instruments for cutting elongated elements and methods of use |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140829 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141128 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150414 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150814 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20151001 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151021 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151119 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5844814 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |