JP5829022B2 - Ultrasonic diagnostic equipment - Google Patents
Ultrasonic diagnostic equipment Download PDFInfo
- Publication number
- JP5829022B2 JP5829022B2 JP2010289052A JP2010289052A JP5829022B2 JP 5829022 B2 JP5829022 B2 JP 5829022B2 JP 2010289052 A JP2010289052 A JP 2010289052A JP 2010289052 A JP2010289052 A JP 2010289052A JP 5829022 B2 JP5829022 B2 JP 5829022B2
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- cross
- path
- puncture needle
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






















Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Description
本発明は、穿刺針を使用する際の超音波画像を表示する超音波診断装置に関する。 The present invention relates to an ultrasonic diagnostic apparatus that displays an ultrasonic image when using a puncture needle.
生体組織に穿刺針を刺し入れて治療又は組織の採取を行なう際には、例えば特許文献1に示すように、穿刺針の刺入予定経路を示す穿刺ガイドラインが表示された超音波画像が参照されている。
When performing treatment or tissue sampling by inserting a puncture needle into a living tissue, for example, as shown in
例えば、穿刺針を用いた前立腺の生検においては、超音波画像で穿刺針を刺す位置を確認した後、超音波画像を参照しながら穿刺針を刺し入れて生体組織の採取を行ない、腫瘍の有無などの検査が行われている。 For example, in a biopsy of the prostate using a puncture needle, after confirming the position where the puncture needle is inserted with an ultrasonic image, the puncture needle is inserted while referring to the ultrasonic image, and biological tissue is collected, Inspections such as presence or absence are performed.
上述のような前立腺の生検においては、腫瘍であると疑われる部分に、複数回(例えば10箇所以上)穿刺針を刺して生体組織を採取している。この時、疑わしい部分全体から均等に生体組織が採取されることが好ましい。しかし、穿刺針を抜いてしまうと、穿刺針を刺し入れた部分が分からなくなってしまうことが多い。従って、均等に穿刺針が刺し入れられているか否かを確認することができない。 In prostate biopsy as described above, a living tissue is collected by inserting a puncture needle into a portion suspected of being a tumor a plurality of times (for example, 10 or more locations). At this time, it is preferable that the biological tissue is collected evenly from the entire suspicious part. However, if the puncture needle is removed, the portion where the puncture needle is inserted is often not known. Therefore, it cannot be confirmed whether or not the puncture needles are equally inserted.
このような事情から、穿刺針を複数回刺す場合において、すでに穿刺針が刺入された位置を確認することができる超音波診断装置が望まれている。 Under such circumstances, there is a demand for an ultrasonic diagnostic apparatus that can confirm a position where a puncture needle has already been inserted when the puncture needle is inserted multiple times.
上述の課題を解決するためになされた発明は、被検体における生体組織に刺入された穿刺針の刺入済み経路の位置と、超音波の送受信領域の位置とを、所定の点を原点とする被検体の三次元空間の座標系において特定する位置特定部と、該位置特定部で特定された前記穿刺針の刺入済み経路の位置情報が記憶される記憶部と、超音波の送受信によって得られたエコー信号に基づく超音波画像を表示させる表示画像制御部と、 前記超音波の送受信領域の位置情報と、前記記憶部に記憶された前記刺入済み経路の位置情報とに基づいて、前記刺入済み経路を示す指示表示を前記超音波画像に表示させる指示表示制御部と、を備えることを特徴とする超音波診断装置である。 The invention made in order to solve the above-mentioned problem is that the position of the inserted path of the puncture needle inserted into the living tissue in the subject and the position of the ultrasonic transmission / reception area are set to a predetermined point as the origin. The position specifying unit specified in the coordinate system of the subject's three-dimensional space, the storage unit storing the inserted path information of the puncture needle specified by the position specifying unit, and transmission / reception of ultrasonic waves Based on the display image control unit that displays an ultrasonic image based on the obtained echo signal, the positional information of the transmission / reception area of the ultrasonic wave, and the positional information of the inserted path stored in the storage unit, An ultrasonic diagnostic apparatus comprising: an instruction display control unit that displays an instruction display indicating the inserted path on the ultrasonic image.
また、他の観点の発明は、被検体における生体組織に刺入された穿刺針の刺入済み経路の位置と、超音波の送受信領域の位置とを、所定の点を原点とする被検体の三次元空間の座標系において特定する位置特定部と、該位置特定部で特定された前記穿刺針の刺入済み経路の位置情報が記憶される記憶部と、超音波の送受信によって得られたエコー信号に基づく超音波画像を表示させる表示画像制御部と、前記三次元空間の座標系において、穿刺針の刺入予定経路を設定する刺入予定経路設定部と、前記穿刺針の刺入予定経路の位置情報と、前記記憶部に記憶された前記刺入済み経路の位置情報とに基づいて、前記刺入予定経路と前記刺入済み経路との距離を計測する距離計測部と、該距離計測部で計測された距離を表示する距離表示制御部と、を備えることを特徴とする超音波診断装置である。 In another aspect of the invention, the position of the inserted path of the puncture needle inserted into the living tissue in the subject and the position of the ultrasonic transmission / reception area are determined based on the predetermined point as the origin. A position specifying unit specified in the coordinate system of the three-dimensional space, a storage unit storing the position information of the inserted path of the puncture needle specified by the position specifying unit, and an echo obtained by transmitting / receiving ultrasonic waves A display image control unit for displaying an ultrasonic image based on the signal, a planned insertion path setting unit for setting a planned insertion path for the puncture needle in the coordinate system of the three-dimensional space, and a planned insertion path for the puncture needle A distance measurement unit that measures the distance between the planned insertion path and the inserted path based on the position information of the path and the position information of the inserted path stored in the storage unit, and the distance measurement A distance display control unit for displaying the distance measured by the unit; An ultrasonic diagnostic apparatus comprising: a.
また、他の観点の発明は、被検体における生体組織に刺入された穿刺針の刺入済み経路の位置と、超音波の送受信領域の位置とを、所定の点を原点とする被検体の三次元空間の座標系において特定する位置特定部と、該位置特定部で特定された前記穿刺針の刺入済み経路の位置情報が記憶される記憶部と、超音波の送受信によって得られたエコー信号に基づく超音波画像を表示させる表示画像制御部と、前記三次元空間の座標系において、穿刺針の刺入予定経路を設定する刺入予定経路設定部と、前記穿刺針の刺入予定経路の位置情報と、前記記憶部に記憶された前記刺入済み経路の位置情報とに基づいて、前記刺入予定経路と前記刺入済み経路との距離を計測する距離計測部と、該距離計測部で計測された距離が所定以下であることを報知する報知部と、を備えることを特徴とする超音波診断装置である。 In another aspect of the invention, the position of the inserted path of the puncture needle inserted into the living tissue in the subject and the position of the ultrasonic transmission / reception area are determined based on the predetermined point as the origin. A position specifying unit specified in the coordinate system of the three-dimensional space, a storage unit storing the position information of the inserted path of the puncture needle specified by the position specifying unit, and an echo obtained by transmitting / receiving ultrasonic waves A display image control unit for displaying an ultrasonic image based on the signal, a planned insertion path setting unit for setting a planned insertion path for the puncture needle in the coordinate system of the three-dimensional space, and a planned insertion path for the puncture needle A distance measurement unit that measures the distance between the planned insertion path and the inserted path based on the position information of the path and the position information of the inserted path stored in the storage unit, and the distance measurement That the distance measured by the A notification unit that, an ultrasonic diagnostic apparatus comprising: a.
また、他の観点の発明は、被検体における生体組織に刺入された穿刺針の刺入済み経路の位置と、超音波の送受信領域の位置とを、所定の点を原点とする被検体の三次元空間の座標系において特定する位置特定部と、該位置特定部で特定された前記穿刺針の刺入済み経路の位置情報が記憶される記憶部と、超音波の送受信によって得られたエコー信号に基づく超音波画像を表示させる表示画像制御部と、前記記憶部に記憶された前記刺入済み経路の位置情報に基づいて、前記刺入済み経路を含む所定の大きさの三次元領域を前記三次元空間において設定する三次元領域設定部と、前記三次元領域に超音波の二次元の送受信領域が含まれる場合に、該二次元の送受信領域についての超音波画像に、前記二次元の送受信領域による前記三次元領域の断面を示す断面表示を表示させる断面表示制御部と、を備えることを特徴とする超音波診断装置である。 In another aspect of the invention, the position of the inserted path of the puncture needle inserted into the living tissue in the subject and the position of the ultrasonic transmission / reception area are determined based on the predetermined point as the origin. A position specifying unit specified in the coordinate system of the three-dimensional space, a storage unit storing the position information of the inserted path of the puncture needle specified by the position specifying unit, and an echo obtained by transmitting / receiving ultrasonic waves A display image control unit for displaying an ultrasonic image based on the signal, and a three-dimensional region having a predetermined size including the inserted path based on the position information of the inserted path stored in the storage unit. When a two-dimensional transmission / reception region of ultrasonic waves is included in the three-dimensional region and a three-dimensional region setting unit that is set in the three-dimensional space, The three-dimensional area by the transmission / reception area And a cross-sectional display control unit for displaying the cross-sectional display showing a cross section, an ultrasonic diagnostic apparatus comprising: a.
さらに、他の観点の発明は、被検体における生体組織に刺入された穿刺針の刺入済み経路の位置と、超音波の送受信領域の位置とを、所定の点を原点とする被検体の三次元空間の座標系において特定する位置特定部と、超音波の送受信によって得られたエコー信号に基づく超音波画像を表示させる表示画像制御部と、前記刺入済み経路の位置情報に基づいて、前記刺入済み経路を含む所定の大きさの三次元領域を前記三次元空間において設定する三次元領域設定部と、前記三次元領域の位置情報が記憶される記憶部と、該記憶部に記憶された前記三次元領域に超音波の二次元の送受信領域が含まれる場合に、該二次元の送受信領域についての超音波画像に、前記二次元の送受信領域による前記三次元領域の断面を示す断面表示を表示させる断面表示制御部と、を備えることを特徴とする超音波診断装置である。 Furthermore, another aspect of the invention relates to a subject having a predetermined point as an origin, the position of the inserted path of the puncture needle inserted into the biological tissue in the subject and the position of the ultrasonic transmission / reception region. Based on the position specifying unit specified in the coordinate system of the three-dimensional space, the display image control unit for displaying the ultrasonic image based on the echo signal obtained by transmitting and receiving the ultrasonic wave, and the position information of the inserted path, A three-dimensional region setting unit that sets a three-dimensional region having a predetermined size including the inserted path in the three-dimensional space, a storage unit that stores position information of the three-dimensional region, and a storage unit that stores the three-dimensional region setting unit A cross-section showing a cross section of the three-dimensional region by the two-dimensional transmission / reception region in an ultrasonic image of the two-dimensional transmission / reception region when the three-dimensional region includes an ultrasonic two-dimensional transmission / reception region Permission to display the display An ultrasonic diagnostic apparatus characterized by comprising a display control unit.
上記観点の発明によれば、前記指示表示制御部により、穿刺針の刺入済み経路を示す指示表示が前記超音波画像に表示されるので、すでに前記穿刺針が刺入された位置を確認することができる。 According to the invention of the above aspect, since the instruction display control unit displays an instruction display indicating the inserted path of the puncture needle in the ultrasonic image, the position where the puncture needle has already been inserted is confirmed. be able to.
上記他の観点の発明によれば、前記距離表示制御部により、前記刺入予定経路と前記刺入済み経路との距離が表示されるので、すでに前記穿刺針が刺入された位置を確認することができる。 According to another aspect of the invention, the distance display control unit displays the distance between the planned insertion path and the inserted path, so that the position where the puncture needle has already been inserted is confirmed. be able to.
上記他の観点の発明によれば、前記報知部により、前記刺入予定経路と前記刺入済み経路との距離が所定以下であることが報知されるので、すでに前記穿刺針が刺入された位置を確認することができる。 According to the invention of the other aspect described above, since the notification unit notifies that the distance between the planned insertion path and the inserted path is less than or equal to a predetermined distance, the puncture needle has already been inserted. The position can be confirmed.
上記他の観点の発明によれば、前記三次元領域設定部により、前記刺入済み経路を含む所定の大きさの三次元領域が設定され、前記断面表示制御部により、二次元の送受信領域による前記三次元領域の断面を示す断面表示が表示されるので、すでに前記穿刺針が刺入された位置を確認することができる。 According to another aspect of the invention, a three-dimensional area having a predetermined size including the inserted path is set by the three-dimensional area setting unit, and a two-dimensional transmission / reception area is set by the cross-section display control unit. Since a cross-sectional display showing the cross section of the three-dimensional region is displayed, the position where the puncture needle has already been inserted can be confirmed.
以下、本発明の実施形態について図面に基づいて説明する。
(第一実施形態)
先ず、第一実施形態について図1〜図9に基づいて詳細に説明する。図1に示す超音波診断装置1は、超音波プローブ2、送受信部3、Bモード処理部4、表示制御部5、表示部6、操作部7、制御部8、HDD(Hard Disk Drive:ハードディスクドライブ)9、磁気発生部10及び磁気センサ11を備える。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
(First embodiment)
First, a first embodiment will be described in detail with reference to FIGS. 1 includes an
前記超音波プローブ2は、アレイ状に配置された複数の超音波振動子(図示省略)を有して構成され、これら超音波振動子によって被検体に対して超音波を送信し、そのエコー信号を受信する。前記超音波プローブ2は、本発明における超音波プローブの実施の形態の一例である。
The
前記超音波プローブ2には、例えばホール素子で構成される前記磁気センサ11が設けられている。この磁気センサ11により、例えば磁気発生コイルで構成される前記磁気発生部10から発生する磁気が検出される。前記磁気センサ11における検出信号は、前記表示制御部5へ入力される。前記磁気センサ11における検出信号は、図示しないケーブルを介して前記表示制御部5へ入力されてもよいし、無線で前記表示制御部5へ入力されてもよい。前記磁気発生部10及び前記磁気センサ11は、後述のように前記超音波プローブ2の位置及び傾きを検出するためのものであり、本発明における位置センサ及び第一位置センサの実施の形態の一例である。
The
また、前記超音波プローブ2には、穿刺針ガイド治具12によって穿刺針13が取り付けられている。
A
前記送受信部3は、前記超音波プローブ2を所定の送信条件で駆動させ、送受信領域を超音波ビームによって音線順次で走査させる。前記送受信部3は前記制御部8からの制御信号によって前記超音波プローブ2を駆動させる。
The transmission /
また、前記送受信部3は、前記超音波プローブ2によって得られた超音波のエコー信号について、整相加算処理等の信号処理を行ない、信号処理後のエコー信号を前記エコー信号処理部4へ出力する。
The transmitter /
前記Bモード処理部4は、前記送受信部3から出力されたエコー信号に対し、対数圧縮処理、包絡線検波処理等の所定の処理を行なってBモードデータを作成する。
The B-
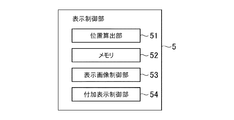
前記表示制御部5は、図2に示すように、位置算出部51、メモリ52、表示画像制御部53及び付加表示制御部54を有する。前記位置算出部51は、前記磁気センサ11からの磁気検出信号に基づいて、前記磁気発生部10を原点とする三次元空間の座標系における前記超音波プローブ2の位置及び傾きの情報(以下、「プローブ位置情報」と云う)を算出する。また、前記位置算出部51は、前記プローブ位置情報に基づいて、前記三次元空間の座標系におけるエコー信号の位置情報を算出して超音波の送受信領域の位置情報を算出する。さらに、前記位置算出部51は、前記プローブ位置情報に基づいて前記三次元空間の座標系における前記穿刺針13の刺入済み経路の位置を算出する。前記位置算出部51は、本発明における位置算出部の実施の形態の一例である。また、前記位置算出部51と前記磁気発生部10及び前記磁気センサ11とは、本発明における位置特定部の実施の形態の一例である。
As shown in FIG. 2, the
ちなみに、前記穿刺針13の刺入を行なう時には被検体は動かないものとし、前記位置算出部51により、前記磁気発生部10を原点とする被検体の三次元空間における超音波の送受信領域の位置情報と刺入済み経路の位置情報とが得られる。
Incidentally, it is assumed that the subject does not move when the
前記メモリ52は、例えばRAM(Random Access Memory)やROM(Read Only Memory)等の半導体メモリ(Memory)などで構成される。このメモリ52には、例えば前記Bモード処理部4から出力されて、後述するように前記表示画像制御部53においてBモード画像データに変換される前のBモードデータなどが記憶される。前記Bモード画像データに変換される前のデータを、ローデータ(Raw Data)と云うものとする。ローデータは、前記HDD9に記憶されるようになっていてもよい。
The
また、前記メモリ52には、前記位置算出部51で算出された前記穿刺針13の刺入済み経路の位置が記憶される。前記穿刺針13の刺入がすでに複数回行なわれている場合には、各回の刺入済み経路の位置が記憶されている。
In addition, the
前記穿刺針13の刺入済み経路の位置は、前記HDD9に記憶されるようになっていてもよい。前記メモリ52及び前記HDD9は、本発明における記憶部の実施の形態の一例である。
The position of the inserted path of the
前記表示画像制御部53は、前記Bモード処理部4で処理されたBモードデータを、スキャンコンバータ(Scan Converter)によってBモード画像データに走査変換し、このBモード画像データに基づくBモード画像を前記表示部6に表示させる。Bモード画像は、本発明における超音波画像の実施の形態の一例である。
The display
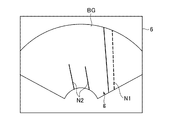
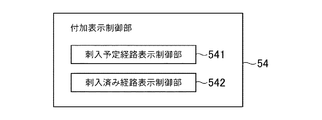
前記付加表示制御部54は、図3に示すようにBモード画像BGに付加表示gを表示する。付加表示gは、本例では穿刺針を刺入する予定の経路(刺入予定経路)を示す穿刺ガイドラインN1と、刺入済みの刺入経路を示す刺入済みマーカN2である。前記付加表示制御部54は、図4に示すように、前記穿刺ガイドラインN1を設定して表示させる刺入予定経路表示制御部541と、前記刺入済みマーカN2を設定して表示させる刺入済み経路表示制御部542とを有している。前記穿刺ガイドラインN1は、本例では破線で示されている。前記穿刺ガイドラインN1は、本発明における刺入予定経路の実施の形態の一例であり、前記刺入予定経路表示制御部541は、本発明における刺入予定経路設定部の実施の形態の一例である。また、前記刺入済みマーカN2は、本例では実線で示されている。前記刺入済みマーカN2は、本発明における刺入済み経路を示す指示表示の実施の形態の一例であり、前記刺入済み経路表示制御部542は、本発明における指示表示制御部の実施の形態の一例である。
The additional
前記表示部6は、LCD(Liquid Crystal Display)やCRT(Cathode Ray Tube)などで構成される。前記操作部7は、操作者が指示や情報を入力するためのキーボード及びポインティングデバイス(図示省略)などを含んで構成されている。
The
前記制御部8は、CPU(Central Processing Unit)を有して構成される。この制御部8は、前記HDD9に記憶された制御プログラムを読み出し、前記超音波診断装置1の各部における機能を実行させる。
The
さて、本例の超音波診断装置1の作用について説明する。ここでは、前記超音波プローブ2として経直腸プローブを用い、前立腺の生検を行なう場合を例に挙げて説明する。
Now, the operation of the ultrasonic
操作者は、前記超音波プローブ2によって超音波の送受信を開始する。そして、前記表示画像制御部53が、超音波の送受信によって得られたエコー信号に基づいて、図5に示すようにリアルタイムのBモード画像BGを前記表示部6に表示させる。
The operator starts transmission / reception of ultrasonic waves by the
また、前記刺入予定経路表示制御部541は、リアルタイムの前記Bモード画像BGに穿刺ガイドラインN1を表示させる。ここで、前記穿刺針ガイド治具12により、前記穿刺針13は超音波の二次元の送受信領域に沿って刺入されるようになっている。前記超音波プローブ2に対する前記穿刺針13の刺入位置及び刺入角度、すなわち前記穿刺針13の刺入予定経路の位置は、前記穿刺針ガイド治具12によって予め定まるため、超音波の送受信領域における刺入予定経路の位置は、予め特定されて前記メモリ52又はHDD9に記憶されている。従って、前記刺入予定経路表示制御部541は、前記刺入予定経路の位置情報に基づいて、前記穿刺ガイドラインN1を前記Bモード画像BGに表示させる。前記穿刺ガイドラインN1は、前記Bモード画像BG上において常に同じ場所に表示される。
Moreover, the said puncture planned path | route
操作者は、前記Bモード画像BGと前記穿刺ガイドラインN1とを見ながら前記穿刺針13の刺入経路を決定する。そして、操作者は前記穿刺針13を生体組織に所定深さ刺入する。この時、前記穿刺針13は、前記穿刺ガイドラインN1に沿って刺入される。
The operator determines the insertion path of the
操作者は、前記穿刺針13を所定深さまで刺入すると、前記操作部7において、穿刺針13の刺入済み経路を記憶する入力を行なう(刺入済み経路の記憶操作)。例えば、操作者は前記操作部7の操作ボタン(図示省略)を押して前記穿刺針13の刺入済み経路を記憶させる。これにより、前記メモリ52又は前記HDD9の少なくとも一方に前記穿刺針13の刺入済み経路が記憶される。
When the operator inserts the
前記穿刺針13が刺入される経路は、前記穿刺ガイドラインN1上の経路である。従って、この穿刺ガイドラインN1の位置が前記刺入済み経路として記憶されてもよい。または、体表面から前記穿刺針13の針先までの深さを入力することにより、前記穿刺ガイドラインN1上において前記穿刺針13が実際に刺入された位置が記憶されてもよい。刺入済み経路とは、前記穿刺針13が実際に刺入された経路と、前記穿刺針13が実際に刺入された経路の延長線とを含む。
The path through which the
ちなみに、体表面から針先までの深さの入力は、刺入済み経路の記憶操作毎に行なってもよいし、複数回にわたって行なわれる刺入の深さが全て同じであれば穿刺を行なう前に深さを予め入力しておいてもよい。 Incidentally, the input of the depth from the body surface to the needle tip may be performed for each storing operation of the inserted path, and before the puncture is performed if the depth of the insertion performed multiple times is the same. The depth may be input in advance.
次に、別の箇所に前記穿刺針13を刺入する場合、操作者は、前記Bモード画像BGに表示された前記穿刺ガイドラインN1とともに、前記刺入済みマーカN2を見ながら、前記穿刺針13の刺入予定経路を決定する。
Next, when the
ここで、前記刺入済みマーカN2の表示について説明する。リアルタイムの前記Bモード画像BGの断面上、すなわち超音波の送受信領域上に、刺入済み経路が存在している場合には、図6に示すように、この刺入済み経路を示す前記刺入済みマーカN2を前記Bモード画像BG上に表示させる。前記刺入済みマーカN2は、本例では実線の線分になっている。前記刺入済み経路表示制御部542は、前記位置算出部51で算出された超音波の送受信領域の位置情報と、前記メモリ52又は前記HDD9に記憶された刺入済み経路の位置情報とに基づいて、前記刺入済みマーカN2を表示させる。ちなみに、前記図6では、複数の前記刺入済みマーカN2が表示されており、すでに複数回の穿刺が行なわれている場合の画像が表示されている。
Here, the display of the inserted marker N2 will be described. When the inserted path exists on the cross section of the B-mode image BG in real time, that is, on the ultrasonic wave transmission / reception area, as shown in FIG. The completed marker N2 is displayed on the B-mode image BG. The inserted marker N2 is a solid line segment in this example. The inserted path
前記刺入済み経路の記憶操作において、体表面から前記穿刺針13の針先までの深さが記憶されている場合、この記憶された情報に基づいて、前記刺入済み経路表示制御部542は、針先までの長さの刺入済みマーカN2を表示させる。前記図6に示すBモード画像BGにおいては、針先までの長さの刺入済みマーカN2が表示されている。
In the storing operation of the inserted path, when the depth from the body surface to the needle tip of the
また、前記刺入済み経路の記憶操作において、体表面から前記穿刺針13の針先までの深さが記憶されていない場合、前記刺入済み経路表示制御部542は、刺入済み経路の位置として記憶された過去の穿刺ガイドラインN1の位置情報に基づいて、図7に示すBモード画像BGにおいて、実際の刺入済み経路の延長線上に延びる前記刺入済みマーカN2を表示させる。
In addition, in the storing operation of the inserted path, when the depth from the body surface to the needle tip of the
操作者は、前記刺入済みマーカN2に対して前記穿刺ガイドラインN1が適切な距離になるように、前記超音波プローブ2の位置を調節する。例えば、操作者は、図6及び図7に示す状態において、前記穿刺ガイドラインN1が前記刺入済みマーカN2に対して近すぎると判断した場合、前記穿刺ガイドラインN1が前記刺入済みマーカN2から遠ざかるように前記超音波プローブ2を移動する。操作者は、前記穿刺ガイドラインN1が適切な位置になると、前記穿刺針13を刺入して上述と同様にして刺入済み経路の記憶操作を行なう。
The operator adjusts the position of the
刺入済み経路の記憶操作が行なわれると、前記刺入済み経路表示制御部542は、新たに記憶された刺入済み経路に前記刺入済みマーカN2を新たに表示させる。そして、操作者は、さらに別の箇所の穿刺を行なう場合には、新たに表示された前記刺入済みマーカN2も考慮しつつ、刺入済み経路を決定する。
When an inserted path storing operation is performed, the inserted path
以上説明した本例の超音波診断装置1によれば、前記刺入済みマーカN2が前記Bモード画像BGに表示されるので、すでに前記穿刺針13が刺入された位置を確認することができる。これにより、適切な距離を空けて前記穿刺針13を刺入することが容易となる。
According to the ultrasonic
次に、第一実施形態の変形例について説明する。例えば、複数の送受信領域について超音波の送受信を行なってこれら複数の送受信領域において穿刺針を刺入する場合、リアルタイムの超音波の送受信領域(これから穿刺針を刺入しようとする面)とは異なる送受信領域(過去の送受信領域)に沿って刺入された穿刺針の刺入済み経路が存在する場合がある。 Next, a modification of the first embodiment will be described. For example, when ultrasonic waves are transmitted / received in a plurality of transmission / reception areas and a puncture needle is inserted in the plurality of transmission / reception areas, it is different from a real-time ultrasonic transmission / reception area (the surface from which the puncture needle is to be inserted) There may be a case where a puncture needle has already been inserted along the transmission / reception area (past transmission / reception area).
ここで、異なる送受信領域とは、例えば図8に示すように、互いに交差する断面P1,P2上における送受信領域α,βを意味するほか、図9に示すように、同一断面P上において、前記超音波プローブ2による超音波の送受信の位置が異なる場合の送受信領域γ,δをも意味する。
Here, for example, as shown in FIG. 8, different transmission / reception areas mean transmission / reception areas α and β on cross sections P1 and P2 that intersect with each other, as shown in FIG. It also means transmission / reception areas γ and δ when the ultrasonic transmission / reception positions by the
例えば、図8に示すように、リアルタイムの超音波の送受信領域が存在する断面と異なる断面の送受信領域に刺入済み経路が存在し、前記リアルタイムの送受信領域と刺入済み経路とが交差する場合、図10に示すように、前記刺入済み経路表示制御部542は、前記刺入済み経路を示す指示表示として×印の刺入済みマーカN2′を、リアルタイムの前記Bモード画像BGに表示させる。具体的には、前記刺入済み経路表示制御部542は、リアルタイムの超音波の送受信領域の位置情報と、前記メモリ52又は前記HDD9に記憶された刺入済み経路の位置情報とに基づいて、リアルタイムのBモード画像BGにおいて、超音波の送受信領域と刺入済み経路とが交差する点に前記刺入済みマーカN2′を表示させる。
For example, as shown in FIG. 8, when a path that has already been inserted exists in a transmission / reception area that is different from the cross section in which the transmission / reception area for real-time ultrasound exists, the real-time transmission / reception area and the insertion path cross As shown in FIG. 10, the inserted path
なお、前記刺入済み経路表示制御部542は、実際の刺入済み経路の延長線上に刺入済みマーカN2を表示させた場合、刺入済み経路の延長線上と超音波の送受信領域とが交差する点に前記刺入済みマーカN2′を表示させてもよい。
When the inserted path
また、図9に示すように、リアルタイムの超音波の送受信領域が存在する断面上に過去の送受信領域が存在し、この過去の送受信領域における刺入済み経路が、リアルタイムの送受信領域に存在する場合、特に図示しないが、前記刺入済み経路表示制御部542は、前記過去の送受信領域における刺入済み経路を示す線状の刺入済みマーカ(前記刺入済みマーカN1と同様の表示形態)を前記Bモード画像BGに表示させる。
In addition, as shown in FIG. 9, when a past transmission / reception area exists on a cross section where a real-time ultrasonic transmission / reception area exists, and the inserted path in the past transmission / reception area exists in the real-time transmission / reception area. Although not particularly illustrated, the inserted path
次に、第二変形例について説明する。図11に示すように、前記穿刺針13に、前記磁気発生部10から発生する磁気を検出する磁気センサ14を設けてもよい。この場合、例えば筒状に形成された穿刺針13の先端部分の中空部に前記磁気センサ14を設ける。この前記磁気センサ14は、本発明における第二センサの実施の形態の一例である。
Next, a second modification will be described. As shown in FIG. 11, the
前記磁気センサ14の磁気検出信号は前記表示制御部5へ入力される。そして、前記表示制御部5の前記位置算出部51は、前記磁気センサ14の磁気検出信号に基づいて、前記磁気発生部10を原点とする三次元空間の座標系における前記穿刺針13の位置を算出し、この穿刺針13の刺入済み経路の位置を算出する。
A magnetic detection signal of the
次に、第三変形例について説明する。前記超音波プローブ2により、三次元の領域における超音波の送受信を行なってボリュームエコー信号を取得してもよい。このボリュームエコー信号は、前記磁気発生部10を原点とする三次元空間の座標系における位置情報とともに、前記メモリ52又は前記HDD9に記憶される。
Next, a third modification will be described. The
この場合、前記表示画像制御部53は、三次元の領域の前記ボリュームエコー信号に基づいて、図12に示すように、前記穿刺針13の刺入予定経路を含む断面P3についての第一Bモード画像BG1と、この第一Bモード画像BG1とは異なる任意の断面P4についての第二Bモード画像BG2とを前記表示部6に表示させる。前記第一Bモード画像BG1は本発明における第一超音波画像の実施の形態の一例であり、前記第二Bモード画像BG2は本発明における第二超音波画像の実施の形態の一例である。
In this case, the display
前記断面P3,P4について図13に基づいて説明すると、刺入予定経路を含む前記断面P3は、前記超音波プローブ2に対して予め所定の位置に設定された断面である。従って、前記位置算出部51により、前記三次元空間の座標系における前記超音波プローブ2の位置が特定されると、前記三次元空間における前記第一Bモード画像BG1の位置が特定される。
The cross sections P3 and P4 will be described with reference to FIG. 13. The cross section P3 including the planned insertion path is a cross section set in advance at a predetermined position with respect to the
また、前記断面P4は、前記断面P3に対して予め所定の位置関係に設定される。前記断面P4は、操作者による前記操作部7を用いた入力操作によって変更できるようになっていてもよい。本例では、前記断面P4は前記断面P3と直交する断面である。前記第一Bモード画像BG1の位置が特定されると、前記第二Bモード画像BG2の位置も特定される。
The cross section P4 is set in a predetermined positional relationship with respect to the cross section P3 in advance. The cross section P4 may be changed by an input operation using the
前記第一Bモード画像BG1及び前記第二Bモード画像BG2は、前記送受信を行ないながら表示される画像、すなわちリアルタイムの画像である。前記刺入予定経路表示制御部541は、前記第一Bモード画像BG1に前記穿刺ガイドラインN1を表示させる。また、前記刺入予定経路表示制御部541は、前記第二Bモード画像BG2において、前記第一Bモード画像BG1における前記穿刺ガイドラインN1の位置と対応する位置に、穿刺ガイドマーカN1′を表示させる。この穿刺ガイドマーカN1′も、前記穿刺ガイドラインN1と同様に前記穿刺針13の刺入予定経路を示す表示である。
The first B-mode image BG1 and the second B-mode image BG2 are images that are displayed while performing the transmission / reception, that is, real-time images. The puncture planned path
一方、前記刺入済み経路表示制御部542は、前記三次元空間における前記第一Bモード画像BG1の位置及び前記第二Bモード画像BG2の位置に、刺入済み経路が存在する場合、前記第一Bモード画像BG1及び前記第二Bモード画像BG2に前記刺入済みマーカN2,N2′を表示させる。
On the other hand, the inserted path
次に、第四変形例について説明する。図14に示すように、前記表示画像制御部53は、リアルタイムの二次元の第一Bモード画像BG1′を前記表示部6に表示させ、また予め前記メモリ52又は前記HDD9に記憶されたボリュームエコー信号に基づく任意断面の第二Bモード画像BG2′を前記表示部6に表示させる。
Next, a fourth modification will be described. As shown in FIG. 14, the display
前記第一Bモード画像BG1′は、二次元の領域を対象にして超音波の送受信を行なって得られるエコー信号に基づくリアルタイムの画像である。また、前記ボリュームエコー信号は、三次元の領域を対象にして超音波の送受信を行なって予め取得され、前記磁気発生部10を原点とする三次元空間の座標系における位置情報を伴って、前記メモリ52又は前記HDD9に記憶されている。
The first B-mode image BG1 ′ is a real-time image based on an echo signal obtained by transmitting and receiving ultrasonic waves for a two-dimensional region. The volume echo signal is acquired in advance by transmitting and receiving ultrasonic waves for a three-dimensional region, and includes position information in a coordinate system of a three-dimensional space with the
前記第一Bモード画像BG1′は、前記超音波プローブ2による超音波の送受信領域の画像であり、第三変形例と同様に、前記穿刺針13の刺入予定経路を含む断面の画像である。また、前記第二Bモード画像BG2′は、第三変形例と同様に、前記第一Bモード画像BG1′の断面に対して予め設定された所定の位置関係の断面の画像であり、例えば前記第一Bモード画像BG1の断面と直交する断面の画像である。
The first B-mode image BG1 ′ is an image of an ultrasonic transmission / reception area by the
第三変形例と同様に、前記三次元空間の座標系における前記超音波プローブ2の位置が特定されると、前記第一Bモード画像BG1′の位置が特定される。また、前記ボリュームエコー信号は、前記三次元空間における位置情報を有しているので、このボリュームエコー信号に基づいて作成される前記第二Bモード画像BG2′の位置は、前記第一Bモード画像BG1′の位置が特定されることによって特定される。そして、第三変形例と同様に、前記第一Bモード画像BG1′及び前記第二Bモード画像BG2′に、前記穿刺ガイドラインN1、前記穿刺ガイドマーカN1′、前記刺入済みマーカN2,N2′が表示される。
Similarly to the third modification, when the position of the
(第二実施形態)
次に、本発明の第二実施形態について説明する。なお、第一実施形態と同一の構成については同一の符号を付して説明を省略する。
(Second embodiment)
Next, a second embodiment of the present invention will be described. In addition, about the structure same as 1st embodiment, the same code | symbol is attached | subjected and description is abbreviate | omitted.
図15に示すように、本例の表示制御部5は、前記位置算出部51、前記メモリ52、前記表示画像制御部53及び付加表示制御部54のほか、距離計測部55を有している。また、図16に示すように、本例の付加表示制御部54は、前記刺入予定経路表示制御部541及び前記刺入済み経路表示制御部542のほか、距離表示制御部543を有している。前記距離計測部55は本発明における距離計測部の実施の形態の一例であり、前記距離表示制御部543は本発明における距離表示制御部の実施の形態の一例である。
As shown in FIG. 15, the
前記距離計測部55は、前記穿刺針13の刺入予定経路と刺入済み経路との距離を計測する。より詳細には、前記距離計測部55は、前記メモリ52又は前記HDD9に記憶された刺入済み経路の位置情報と、前記刺入予定経路表示制御部541によって設定される刺入予定経路の位置情報とに基づいて距離の計測を行なう。
The
前記距離表示制御部543は、図17に示すように前記距離計測部55で計測された距離のうち、最も小さい距離を示す距離表示Dを、前記付加表示gとして前記表示部6に表示させる。この距離表示Dは、前記穿刺ガイドラインL1から最も距離が近い刺入済み経路までの距離を示しているので、前記穿刺針13が刺入された位置を確認することができる。従って、本例によっても第一実施形態と同様に、適切な距離を空けて前記穿刺針13を刺入することが容易となる。
The distance
ちなみに、本例においては、前記刺入済みマーカN2が表示されなくてもよい。この刺入済みマーカN2が表示されなくても、操作者は前記距離表示Dをたよりに穿刺を行なうことができる。 Incidentally, in this example, the inserted marker N2 may not be displayed. Even if the inserted marker N2 is not displayed, the operator can perform puncturing based on the distance display D.
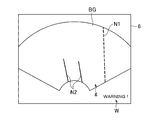
次に、第二実施形態の変形例を説明する。図18に示すように、前記付加表示制御部54は、前記距離表示制御部543の代わりに、警告表示制御部544を有していてもよい。この警告表示制御部544は、前記距離計測部55で計測された距離のうち、最も小さい距離が予め設定された所定の閾値よりも小さい場合、図19に示すように前記表示部6に警告表示Wを表示する。前記警告表示制御部544は、本発明における報知部の実施の形態の一例である。
Next, a modification of the second embodiment will be described. As shown in FIG. 18, the additional
ただし、前記距離計測部55で計測された距離のうち、最も小さい距離が予め設定された所定の閾値よりも小さくなった場合、前記警告表示Wが表示される場合に限られるものではなく、例えば前記刺入予定経路表示制御部541が前記穿刺ガイドラインN1の表示形態を変更してもよい。例えば、前記刺入予定経路表示制御部541は、前記距離計測部55で計測された距離のうち、最も小さい距離が予め設定された所定の閾値よりも小さくなった場合に、前記穿刺ガイドラインN1の色を異なる色にしてもよいし、二点鎖線の穿刺ガイドラインN1を表示させてもよい。この場合、前記刺入予定経路表示制御部541が本発明における報知部の実施の形態の一例である。
However, it is not limited to the case where the warning display W is displayed when the smallest distance among the distances measured by the
さらには、前記距離計測部55で計測された距離のうち、最も小さい距離が予め設定された所定の閾値よりも小さくなった場合、その旨を音声で知らせるようにしてもよい。
Furthermore, when the smallest distance among the distances measured by the
(第三実施形態)
次に、本発明の第三実施形態について説明する。なお、第一、第二実施形態と同一の構成については同一の符号を付して説明を省略する。
(Third embodiment)
Next, a third embodiment of the present invention will be described. In addition, about the structure same as 1st, 2nd embodiment, the same code | symbol is attached | subjected and description is abbreviate | omitted.
図20に示すように、本例の表示制御部5は、前記位置算出部51、前記メモリ52、前記表示画像制御部53及び付加表示制御部54のほか、三次元領域設定部56を有している。また、図21に示すように、本例の付加表示制御部54は、前記刺入予定経路表示制御部541のほか、断面表示制御部545を有している。前記三次元領域設定部56は本発明における三次元領域設定部の実施の形態の一例であり、前記断面表示制御部545は本発明における断面表示制御部の実施の形態の一例である。
As shown in FIG. 20, the
前記三次元領域設定部56は、前記刺入済み経路の位置情報に基づいて、前記磁気発生部10を原点とする三次元空間に、前記刺入済み経路を含む所定の大きさの三次元領域を設定する。本例では、前記三次元領域設定部56は、図22に示すように、刺入済み経路Xを中心とする半径rの円を断面とする円柱Cを前記三次元領域として設定する。
The three-dimensional
前記半径rは、予め設定されていてもよく、操作者が前記操作部7において入力してもよい。前記半径rの大きさは、例えば前記刺入済み経路Xから最低限確保すべき穿刺針13までの距離に設定される。この場合、前記円柱Cは、前記穿刺針13を刺入すべきでない領域を意味する。
The radius r may be set in advance, or may be input by the operator through the
前記断面表示制御部545は、前記円柱Cに超音波の送受信領域が含まれる場合に、図23に示すように、この送受信領域についてのBモード画像BGに、前記超音波の送受信領域による前記円柱Cの断面を示す断面表示Sを表示させる。
When the ultrasonic transmission / reception area is included in the cylinder C, the cross-section
超音波の送受信領域は、リアルタイムの送受信の領域であり、二次元の領域である。前記断面表示制御部545は、前記位置算出部51で算出される送受信領域の位置情報と、前記円柱Cの位置情報とに基づいて、リアルタイムのBモード画像BGに前記断面表示Sを表示させる。
The ultrasonic transmission / reception area is a real-time transmission / reception area and is a two-dimensional area. The cross-section
前記超音波の送受信領域は、前記穿刺針13の刺入予定経路を含む面であり、前記刺入予定経路表示制御部541は、前記穿刺ガイドラインN1を前記Bモード画像BGに表示させる。操作者は、穿刺ガイドラインN1が前記断面表示S内に位置しないように前記超音波プローブ2の位置を調節して前記穿刺針13の刺入予定経路を決定する。
The ultrasonic transmission / reception area is a plane including a planned insertion path of the
ちなみに、図23に示された前記断面表示Sは、前記超音波の送受信領域が存在する断面に沿って刺入された穿刺針13の刺入済み経路を含む三次元領域の断面を示す表示である。この場合、前記三次元領域設定部56は、リアルタイムの超音波の送受信領域が存在する断面に沿って刺入された前記穿刺針13の刺入済み経路を含む三次元領域を前記円柱Cとして設定する。この場合に設定される三次元領域は、本発明における第一の三次元領域の実施の形態の一例である。
Incidentally, the cross-sectional display S shown in FIG. 23 is a display showing a cross-section of a three-dimensional region including the inserted path of the
ここで、前記三次元領域設定部56は、前記メモリ52又は前記HDD9に記憶された過去の全ての前記刺入済み経路の位置情報に基づいて、前記断面表示Sを表示させる際に逐一前記三次元領域を設定してもよいが、前記刺入済み経路の位置情報が得られる毎に、前記三次元領域を設定し、この三次元領域の位置情報を前記メモリ52又は前記HDD9に記憶してもよい。そして、前記断面表示制御部545は、前記メモリ52又は前記HDD9に記憶された前記三次元領域の位置情報に基づいて、前記断面表示Sを表示させてもよい。
Here, the three-dimensional
以上説明した本例によっても上記各実施形態と同様に前記穿刺針13が刺入された位置を確認することができる。
Also in this example described above, the position where the
ちなみに、本例においても、第一実施形態の第一変形例と同様に、リアルタイムの超音波の送受信領域が存在する断面と異なる断面に沿って前記穿刺針13が刺入された場合、前記三次元領域設定部56は、このような穿刺針13の刺入済み経路を含む三次元領域を円柱C′(図示省略)として設定する。この場合に設定される三次元領域は、本発明における第二の三次元領域の実施の形態の一例である。そして、前記断面表示制御部545は、図24に示すように、リアルタイムの超音波の送受信領域による前記円柱C′の断面を示す断面表示S′を、前記断面表示SとともにリアルタイムのBモード画像BGに表示させる。
Incidentally, also in this example, as in the first modification of the first embodiment, when the
なお、リアルタイムの超音波の送受信領域が存在する断面に、過去の送受信領域の刺入済み経路が存在する場合も、この刺入済み経路を含む三次元領域の断面表示が、リアルタイムのBモード画像BGに表示されてもよい。 Note that even when a past transmission / reception area insertion path exists in a cross section in which a real-time ultrasonic transmission / reception area exists, a cross-sectional display of a three-dimensional area including the insertion path is displayed in real time. It may be displayed on the BG.
また、第一実施形態の第三変形例と同様に、前記表示画像制御部53は、ボリュームエコー信号に基づいて、図25に示すように、前記穿刺針13の刺入予定経路を含む断面P3についての第一Bモード画像BG1と、この第一Bモード画像BG1とは異なる任意の断面P4についての第二Bモード画像BG2とを前記表示部6に表示させてもよい。この場合、前記三次元空間における前記第一Bモード画像BG1の位置及び前記第二Bモード画像BG2の位置に前記三次元領域が存在する場合、前記断面表示制御部545は、前記第一Bモード画像BG1及び前記第二Bモード画像BG2に前記断面表示S,S′を表示させる。また、前記刺入予定経路表示制御部541は、前記第一Bモード画像BG1に前記穿刺ガイドラインN1を表示させ、前記第二Bモード画像BG2に前記穿刺ガイドマーカN1′を表示させる。
Similarly to the third modification of the first embodiment, the display
さらに、第一実施形態の第四変形例と同様に、前記表示画像制御部53は、図26に示すように、リアルタイムの二次元の第一Bモード画像BG1′を前記表示部6に表示させ、また予め前記メモリ52又は前記HDD9に記憶されたボリュームエコー信号に基づく任意断面の第二Bモード画像BG2′を前記表示部6に表示させてもよい。この場合も、前記三次元空間における前記第一Bモード画像BG1′の位置及び前記第二Bモード画像BG2′の位置に前記三次元領域が存在する場合、前記断面表示制御部545は、前記第一Bモード画像BG1′及び前記第二Bモード画像BG2′に前記断面表示Cを表示させる。また、前記刺入予定経路表示制御部541は、前記第一Bモード画像BG1′に前記穿刺ガイドラインN1を表示させ、前記第二Bモード画像BG2′に前記穿刺ガイドマーカN1′を表示させる。
Further, as in the fourth modification of the first embodiment, the display
以上、本発明を前記実施形態によって説明したが、本発明はその主旨を変更しない範囲で種々変更実施可能なことはもちろんである。例えば、第二実施形態及び第三実施形態においても、第一実施形態の第二変形例と同様に、前記穿刺針13に前記磁気センサ14を設けてもよい。
As mentioned above, although this invention was demonstrated by the said embodiment, of course, this invention can be variously implemented in the range which does not change the main point. For example, also in the second embodiment and the third embodiment, the
また、第二実施形態において、第一実施形態の第三変形例及び第四変形例のように、前記第一Bモード画像BG1,BG1′及び前記第二Bモード画像BG2,BG2′が表示されてもよい。さらに、第二実施形態において、前記刺入済み経路表示制御部542は、リアルタイムの超音波の送受信領域とは異なる送受信領域の刺入済み経路を示す刺入済みマーカをリアルタイムのBモード画像に表示させてもよい。
In the second embodiment, the first B mode images BG1, BG1 ′ and the second B mode images BG2, BG2 ′ are displayed as in the third modification and the fourth modification of the first embodiment. May be. Further, in the second embodiment, the inserted path
1 超音波診断装置
2 超音波プローブ
10 磁気発生部
11 磁気センサ(位置センサ、第一位置センサ)
13 穿刺針
14 磁気センサ(第二位置センサ)
51 位置算出部
52 メモリ(記憶部)
53 表示画像制御部
55 距離計測部
56 三次元領域設定部
541 刺入予定経路表示制御部(刺入予定経路設定部)
542 刺入済み経路表示制御部(指示表示制御部)
543 距離表示制御部
544 警告表示制御部(報知部)
545 断面表示制御部
N2,N2′ 刺入済みマーカ(指示表示)
D 距離表示
W 警告表示
S,S′ 断面表示
DESCRIPTION OF
13
51
53 Display
542 Inserted route display control unit (instruction display control unit)
543 Distance
545 Section display control unit N2, N2 'Inserted marker (indication display)
D Distance display W Warning display S, S 'Cross section display
Claims (18)
該位置特定部で特定された前記穿刺針の刺入済み経路の位置情報が記憶される記憶部と、
超音波の送受信によって得られたエコー信号に基づく超音波画像を表示させる表示画像制御部と、
前記一の座標系において、穿刺針の刺入予定経路を設定する刺入予定経路設定部と、
前記穿刺針の刺入予定経路の位置情報と、前記記憶部に記憶された前記刺入済み経路の位置情報とに基づいて、前記刺入予定経路と前記刺入済み経路との距離を計測する距離計測部と、
該距離計測部で計測された距離を表示する距離表示制御部とを備えることを特徴とする超音波診断装置。 A position specifying unit that specifies the position of the inserted path of the puncture needle inserted into the living tissue in the subject and the position of the ultrasonic transmission / reception area in one coordinate system;
A storage unit for storing position information of the inserted path of the puncture needle specified by the position specifying unit;
A display image control unit for displaying an ultrasonic image based on an echo signal obtained by transmitting and receiving ultrasonic waves;
In the one coordinate system, a planned insertion path setting unit for setting a planned insertion path for the puncture needle,
Based on the position information of the planned insertion path of the puncture needle and the positional information of the inserted path stored in the storage unit, the distance between the planned insertion path and the inserted path is measured. A distance measuring unit;
An ultrasonic diagnostic apparatus comprising: a distance display control unit that displays a distance measured by the distance measurement unit.
該位置特定部で特定された前記穿刺針の刺入済み経路の位置情報が記憶される記憶部と、
超音波の送受信によって得られたエコー信号に基づく超音波画像を表示させる表示画像制御部と、
前記一の座標系において、穿刺針の刺入予定経路を設定する刺入予定経路設定部と、
前記穿刺針の刺入予定経路の位置情報と、前記記憶部に記憶された前記刺入済み経路の位置情報とに基づいて、前記刺入予定経路と前記刺入済み経路との距離を計測する距離計測部と、
該距離計測部で計測された距離が所定以下であることを報知する報知部とを備えることを特徴とする超音波診断装置。 A position specifying unit that specifies the position of the inserted path of the puncture needle inserted into the living tissue in the subject and the position of the ultrasonic transmission / reception area in one coordinate system;
A storage unit for storing position information of the inserted path of the puncture needle specified by the position specifying unit;
A display image control unit for displaying an ultrasonic image based on an echo signal obtained by transmitting and receiving ultrasonic waves;
In the one coordinate system, a planned insertion path setting unit for setting a planned insertion path for the puncture needle,
Based on the position information of the planned insertion path of the puncture needle and the positional information of the inserted path stored in the storage unit, the distance between the planned insertion path and the inserted path is measured. A distance measuring unit;
An ultrasonic diagnostic apparatus comprising: a notifying unit for notifying that a distance measured by the distance measuring unit is equal to or less than a predetermined value.
該位置特定部で特定された前記穿刺針の複数の刺入済み経路及び前記穿刺針の刺入予定経路の位置情報が記憶される記憶部と、
超音波の送受信によって得られたエコー信号に基づく二次元の超音波画像を表示させる表示画像制御部と、
前記超音波の送受信領域の位置情報と、前記記憶部に記憶された前記複数の刺入済み経路及び前記刺入予定経路の位置情報とに基づいて、前記複数の刺入済み経路及び前記刺入予定経路を直線で示す指示表示をリアルタイムの前記超音波画像に表示された前記被検体に一緒に表示させる指示表示制御部とを備えることを特徴とする超音波診断装置。 Positions of a plurality of already inserted paths of a puncture needle inserted into a living tissue in a subject, positions of planned insertion paths of a puncture needle scheduled to be inserted into the living tissue, and positions of ultrasonic transmission / reception areas And a position specifying unit that specifies in one coordinate system,
A storage unit for storing position information of a plurality of already inserted paths of the puncture needle specified by the position specifying unit and a planned insertion path of the puncture needle;
A display image control unit for displaying a two-dimensional ultrasonic image based on an echo signal obtained by transmitting and receiving ultrasonic waves;
Based on the position information of the ultrasonic transmission / reception area, and the position information of the plurality of inserted paths and the planned insertion path stored in the storage unit, the plurality of inserted paths and the inserted paths An ultrasonic diagnostic apparatus comprising: an instruction display control unit configured to display an instruction display indicating a planned route in a straight line on the subject displayed in the ultrasonic image in real time .
前記表示画像制御部は、前記ボリュームエコー信号に基づいて、前記穿刺針の刺入予定経路に沿った断面についてのリアルタイムの第一超音波画像と、該第一超音波画像とは異なる断面についての第二超音波画像とを表示させ、
前記指示表示制御部は、前記第一超音波画像及び前記第二超音波画像に前記指示表示を表示させる
ことを特徴とする請求項3〜5のいずれか一項に記載の超音波診断装置。 Equipped with an ultrasonic probe that transmits and receives ultrasonic waves in a three-dimensional region to acquire volume echo signals,
The display image control unit, based on the volume echo signal, a real-time first ultrasonic image of a cross section along a planned insertion path of the puncture needle and a cross section different from the first ultrasonic image. Display the second ultrasound image,
The indication display control unit, the ultrasonic diagnostic apparatus according to any one of claims 3-5, characterized in that for displaying the instruction displayed on the first ultrasound image and the second ultrasound image.
前記指示表示制御部は、前記第一超音波画像及び前記第二超音波画像に前記指示表示を表示させる
ことを特徴とする請求項3〜5のいずれか一項に記載の超音波診断装置。 The display image control unit is an arbitrary one based on a real-time first ultrasonic image of a cross section along the inserted path of the puncture needle and a volume echo signal acquired in advance by transmission / reception of ultrasonic waves in a three-dimensional region. Display a second ultrasound image of the cross section,
The indication display control unit, the ultrasonic diagnostic apparatus according to any one of claims 3-5, characterized in that for displaying the instruction displayed on the first ultrasound image and the second ultrasound image.
該位置特定部で特定された前記穿刺針の刺入済み経路の位置情報が記憶される記憶部と、
超音波の送受信によって得られたエコー信号に基づく二次元の超音波画像を表示させる表示画像制御部と、
前記記憶部に記憶された前記刺入済み経路の位置情報に基づいて、操作者によって半径の値が入力され前記刺入済み経路を含む円柱の三次元領域であって前記穿刺針を刺入すべきでない三次元領域を前記三次元空間において設定する三次元領域設定部と、
前記三次元領域に超音波の二次元の送受信領域が含まれる場合に、該二次元の送受信領域についての超音波画像に、前記二次元の送受信領域による前記三次元領域の断面を示す断面表示を表示させる断面表示制御部とを備えることを特徴とする超音波診断装置。 A position specifying unit that specifies the position of the inserted path of the puncture needle inserted into the biological tissue in the subject and the position of the ultrasonic transmission / reception area in the coordinate system of the three-dimensional space;
A storage unit for storing position information of the inserted path of the puncture needle specified by the position specifying unit;
A display image control unit for displaying a two-dimensional ultrasonic image based on an echo signal obtained by transmitting and receiving ultrasonic waves;
Based on the position information of the inserted path stored in the storage unit, the operator inputs a radius value and inserts the puncture needle in a three-dimensional area of a cylinder including the inserted path A three-dimensional region setting unit for setting a non-shouldable three-dimensional region in the three-dimensional space;
When the two-dimensional transmission / reception area of ultrasonic waves is included in the three-dimensional area, a cross-sectional display showing a cross section of the three-dimensional area by the two-dimensional transmission / reception area is displayed on the ultrasonic image of the two-dimensional transmission / reception area. An ultrasonic diagnostic apparatus comprising: a cross-sectional display control unit for displaying.
超音波の送受信によって得られたエコー信号に基づく二次元の超音波画像を表示させる表示画像制御部と、
前記刺入済み経路の位置情報に基づいて、操作者によって半径の値が入力され前記刺入済み経路を含む円柱の三次元領域であって前記穿刺針を刺入すべきでない三次元領域を前記三次元空間において設定する三次元領域設定部と、
前記三次元領域の位置情報が記憶される記憶部と、
該記憶部に記憶された前記三次元領域に超音波の二次元の送受信領域が含まれる場合に、該二次元の送受信領域についての超音波画像に、前記二次元の送受信領域による前記三次元領域の断面を示す断面表示を表示させる断面表示制御部とを備えることを特徴とする超音波診断装置。 A position specifying unit that specifies the position of the inserted path of the puncture needle inserted into the biological tissue in the subject and the position of the ultrasonic transmission / reception area in the coordinate system of the three-dimensional space;
A display image control unit for displaying a two-dimensional ultrasonic image based on an echo signal obtained by transmitting and receiving ultrasonic waves;
Based on the position information of the inserted path, a radius value is input by an operator, and the 3D area of the cylinder including the inserted path is not inserted with the puncture needle. A three-dimensional region setting unit to be set in a three-dimensional space;
A storage unit for storing position information of the three-dimensional region;
When the two-dimensional transmission / reception region of the ultrasonic wave is included in the three-dimensional region stored in the storage unit, the three-dimensional region by the two-dimensional transmission / reception region is included in an ultrasonic image of the two-dimensional transmission / reception region. An ultrasonic diagnostic apparatus comprising: a cross-sectional display control unit that displays a cross-sectional display showing a cross section of the head.
前記断面表示制御部は、前記断面表示として、リアルタイムの超音波の送受信領域による前記第一の三次元領域の断面を示す断面表示を、リアルタイムの前記超音波画像に表示させることを特徴とする請求項9〜11のいずれか一項に記載の超音波診断装置。 The three-dimensional region setting unit sets, as the three-dimensional region, a first three-dimensional region including a punctured path of the puncture needle inserted along a cross section in which a real-time ultrasonic transmission / reception region exists. And
The cross-sectional display control unit displays, as the cross-sectional display, a cross-sectional display showing a cross section of the first three-dimensional region by a real-time ultrasonic transmission / reception region on the real-time ultrasonic image. Item 9. The ultrasonic diagnostic apparatus according to any one of Items 9 to 11.
前記断面表示制御部は、前記断面表示として、リアルタイムの超音波の送受信領域による前記第二の三次元領域の断面を示す断面表示を、リアルタイムの前記超音波画像に表示させることを特徴とする請求項9〜12のいずれか一項に記載の超音波診断装置。 The three-dimensional region setting unit includes, as the three-dimensional region, a second tertiary including the inserted path of the puncture needle inserted along a cross-section different from a cross-section in which a real-time ultrasonic transmission / reception region exists. Set the original area,
The cross-sectional display control unit displays, as the cross-sectional display, a cross-sectional display showing a cross-section of the second three-dimensional region by a real-time ultrasonic transmission / reception region on the real-time ultrasonic image. Item 9. The ultrasonic diagnostic apparatus according to any one of Items 9 to 12 .
前記表示画像制御部は、前記ボリュームエコー信号に基づいて、前記穿刺針の刺入済み経路に沿った断面についての第一超音波画像と、該第一超音波画像とは異なる断面についての第二超音波画像とを表示させ、
前記断面表示制御部は、前記第一超音波画像及び前記第二超音波画像に前記断面表示を表示させる
ことを特徴とする請求項9〜13のいずれか一項に記載の超音波診断装置。 Equipped with an ultrasonic probe that acquires volume echo signals by transmitting and receiving ultrasonic waves in a three-dimensional region,
The display image control unit, based on the volume echo signal, a first ultrasonic image of a cross section along the inserted path of the puncture needle and a second cross section different from the first ultrasonic image. Display an ultrasound image,
The sectional display control unit ultrasonic diagnostic apparatus according to any one of claims 9-1 3, characterized in that for displaying the cross-section displayed on the first ultrasound image and the second ultrasound image .
前記断面表示制御部は、前記第一超音波画像及び前記第二超音波画像に前記断面表示を表示させる
ことを特徴とする請求項9〜13のいずれか一項に記載の超音波診断装置。 The display image control unit is an arbitrary one based on a real-time first ultrasonic image of a cross section along the inserted path of the puncture needle and a volume echo signal acquired in advance by transmission / reception of ultrasonic waves in a three-dimensional region. Display a second ultrasound image of the cross section,
The sectional display control unit ultrasonic diagnostic apparatus according to any one of claims 9-1 3, characterized in that for displaying the cross-section displayed on the first ultrasound image and the second ultrasound image .
前記生体組織に対して超音波の送受信を行なう超音波プローブの位置及び角度を検出する位置センサと、
該位置センサで検出された前記超音波プローブの位置及び角度に基づいて、前記刺入済み経路、前記刺入予定経路及び前記超音波の送受信領域の位置を算出する位置算出部と、
からなることを特徴とする請求項1〜8のいずれか一項に記載の超音波診断装置。 The position specifying unit includes:
A position sensor for detecting the position and angle of an ultrasonic probe that transmits and receives ultrasonic waves to and from the living tissue;
Based on the position and angle of the ultrasonic probe detected by the position sensor, a position calculation unit that calculates the position of the inserted path, the planned insertion path, and the ultrasonic transmission / reception area;
It is composed of the ultrasonic diagnostic apparatus according to any one of claims 1 to 8, wherein.
前記生体組織に対して超音波の送受信を行なう超音波プローブの位置及び角度を検出する第一位置センサと、
前記穿刺針の位置を検出する第二位置センサと、
前記第一位置センサの検出信号に基づいて前記超音波の送受信領域の位置を算出し、前記第二位置センサの検出信号に基づいて前記刺入済み経路及び前記刺入予定経路の位置を算出する位置算出部と、
からなることを特徴とする請求項1〜8のいずれか一項に記載の超音波診断装置。 The position specifying unit includes:
A first position sensor that detects a position and an angle of an ultrasonic probe that transmits and receives ultrasonic waves to and from the living tissue;
A second position sensor for detecting the position of the puncture needle;
The position of the ultrasonic wave transmission / reception area is calculated based on the detection signal of the first position sensor, and the positions of the inserted path and the planned insertion path are calculated based on the detection signal of the second position sensor. A position calculation unit;
It is composed of the ultrasonic diagnostic apparatus according to any one of claims 1 to 8, wherein.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010289052A JP5829022B2 (en) | 2010-12-27 | 2010-12-27 | Ultrasonic diagnostic equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010289052A JP5829022B2 (en) | 2010-12-27 | 2010-12-27 | Ultrasonic diagnostic equipment |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012135394A JP2012135394A (en) | 2012-07-19 |
| JP2012135394A5 JP2012135394A5 (en) | 2013-03-07 |
| JP5829022B2 true JP5829022B2 (en) | 2015-12-09 |
Family
ID=46673371
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010289052A Active JP5829022B2 (en) | 2010-12-27 | 2010-12-27 | Ultrasonic diagnostic equipment |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5829022B2 (en) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6224334B2 (en) * | 2013-03-28 | 2017-11-01 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | Ultrasonic diagnostic apparatus and control program therefor |
| JP6073743B2 (en) * | 2013-05-14 | 2017-02-01 | 東芝メディカルシステムズ株式会社 | Ultrasonic diagnostic apparatus and image processing program |
| JP6026455B2 (en) * | 2014-03-17 | 2016-11-16 | 富士フイルム株式会社 | MEDICAL IMAGE DISPLAY DEVICE, ITS OPERATION METHOD, AND PROGRAM |
| JP5830576B1 (en) * | 2014-06-04 | 2015-12-09 | 日立アロカメディカル株式会社 | Medical system |
| EP3318194A4 (en) * | 2015-07-02 | 2019-04-03 | Olympus Corporation | Ultrasonic observation apparatus, ultrasonic observation apparatus operation method, and ultrasonic observation apparatus operation program |
| WO2019111552A1 (en) * | 2017-12-06 | 2019-06-13 | 富士フイルム株式会社 | Ultrasonic diagnostic device and method of controlling ultrasonic diagnostic device |
| JP2020044045A (en) * | 2018-09-18 | 2020-03-26 | オリンパス株式会社 | Ultrasonic observation apparatus, operation method of ultrasonic observation apparatus, and operation program of ultrasonic observation apparatus |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3251682B2 (en) * | 1993-01-11 | 2002-01-28 | 株式会社東芝 | Ultrasound diagnostic equipment |
| JP4828802B2 (en) * | 2004-05-12 | 2011-11-30 | 株式会社東芝 | Ultrasonic diagnostic equipment for puncture therapy |
| JP4467927B2 (en) * | 2003-08-19 | 2010-05-26 | 株式会社東芝 | Ultrasonic diagnostic equipment |
| JP5113387B2 (en) * | 2004-11-17 | 2013-01-09 | 株式会社日立メディコ | Ultrasonic diagnostic apparatus and ultrasonic image display method |
| JP4634859B2 (en) * | 2005-05-20 | 2011-02-16 | 株式会社日立メディコ | Treatment device |
| JP2007000226A (en) * | 2005-06-22 | 2007-01-11 | Toshiba Corp | Medical image diagnostic apparatus |
| JP4958455B2 (en) * | 2006-03-10 | 2012-06-20 | 株式会社日立メディコ | Ultrasonic diagnostic equipment |
| JP5416900B2 (en) * | 2007-11-22 | 2014-02-12 | 株式会社東芝 | Ultrasonic diagnostic apparatus and puncture support control program |
-
2010
- 2010-12-27 JP JP2010289052A patent/JP5829022B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012135394A (en) | 2012-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5829022B2 (en) | Ultrasonic diagnostic equipment | |
| JP5574742B2 (en) | Ultrasonic diagnostic equipment | |
| JP5743329B2 (en) | Ultrasonic diagnostic apparatus and control program therefor | |
| JP5717543B2 (en) | Ultrasonic diagnostic apparatus and control program therefor | |
| JP5889095B2 (en) | Puncture planning support apparatus, medical image apparatus, and ultrasonic diagnostic apparatus | |
| JP5601684B2 (en) | Medical imaging device | |
| EP2921116B1 (en) | Medical image display apparatus, method, and program | |
| JP2014161598A (en) | Ultrasonic diagnostic apparatus and control program for the same | |
| JP5682873B2 (en) | Ultrasonic diagnostic equipment | |
| JP6014352B2 (en) | Ultrasound system | |
| JP2014195729A (en) | Ultrasound diagnosis system | |
| JP6224334B2 (en) | Ultrasonic diagnostic apparatus and control program therefor | |
| JP6382031B2 (en) | Ultrasonic diagnostic apparatus and control program therefor | |
| JP2016059481A (en) | Ultrasonic diagnostic device and control program thereof | |
| JP2019122842A (en) | Ultrasound diagnostic apparatus | |
| JP5869364B2 (en) | Ultrasonic diagnostic apparatus and control program therefor | |
| JP6203514B2 (en) | Ultrasonic diagnostic apparatus and control program therefor | |
| JP6325495B2 (en) | Ultrasonic diagnostic apparatus and program thereof | |
| JP5569903B2 (en) | Ultrasonic diagnostic apparatus and control program therefor | |
| JP2017196129A (en) | Ultrasound image display apparatus and control program therefor | |
| JP6588694B2 (en) | Ultrasonic diagnostic equipment | |
| JP5908784B2 (en) | Position detection apparatus and ultrasonic image display apparatus | |
| JP2012231810A (en) | Ultrasonic diagnostic apparatus, and control program therefor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121211 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130117 |
|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20131022 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140319 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140512 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150403 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20150609 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150929 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151021 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5829022 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |