JP5771925B2 - Image forming apparatus - Google Patents
Image forming apparatus Download PDFInfo
- Publication number
- JP5771925B2 JP5771925B2 JP2010206520A JP2010206520A JP5771925B2 JP 5771925 B2 JP5771925 B2 JP 5771925B2 JP 2010206520 A JP2010206520 A JP 2010206520A JP 2010206520 A JP2010206520 A JP 2010206520A JP 5771925 B2 JP5771925 B2 JP 5771925B2
- Authority
- JP
- Japan
- Prior art keywords
- color misregistration
- amount
- test pattern
- unit
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Color Electrophotography (AREA)
- Image Processing (AREA)
- Facsimile Image Signal Circuits (AREA)
- Color Image Communication Systems (AREA)
- Color, Gradation (AREA)
- Electrostatic Charge, Transfer And Separation In Electrography (AREA)
- Control Or Security For Electrophotography (AREA)
Description
本発明は、画像形成装置に関する。 The present invention relates to an image forming apparatus.
電子写真方式のカラー画像形成装置では、複数の画像形成部を直列に配置して、1パスでフルカラー画像を形成するタンデム方式が主流となっている。しかし、このタンデム方式では、各色の画像形成部における感光体ドラムや露光装置等の位置精度や径のずれや、光学系の精度ずれなどに起因して、各色の記録用紙上での位置ずれによる色ずれ(レジずれ)となって現れる。このため、タンデム方式では、色ずれ制御(レジストレーション制御ともいう)が不可欠である。 In an electrophotographic color image forming apparatus, a tandem method in which a plurality of image forming units are arranged in series to form a full color image in one pass is the mainstream. However, in this tandem method, due to positional deviation or diameter deviation of the photosensitive drum or exposure device in the image forming unit of each color, accuracy deviation of the optical system, etc., due to positional deviation on the recording paper of each color. Appears as color misregistration (registration misalignment). For this reason, in the tandem system, color misregistration control (also referred to as registration control) is indispensable.
この色ずれ制御の方法として、一般的に、中間転写ベルト上に各色の色ずれ検出用のテストパターンを形成して、このテストパターンの位置をセンサで検知してその結果からレジずれ量を算出する。そして、算出されたレジずれ量を基に、各光学系の光路を補正したり、各色の画像書き出し位置や画素クロック周波数を補正する色ずれ制御方法が知られている。 As a method of color misregistration control, a test pattern for detecting color misregistration of each color is generally formed on the intermediate transfer belt, the position of this test pattern is detected by a sensor, and the amount of misregistration is calculated from the result. To do. A color misregistration control method is known that corrects the optical path of each optical system based on the calculated registration misregistration amount, and corrects the image writing position and pixel clock frequency of each color.
しかし、従来の色ずれ制御方法では、2つの問題点があった。1つ目の問題点として、光学系の光路を補正するためには、光源やf−θレンズを含む補正光学系や光路内のミラー等を、機械的に動作させ、各色の位置を合わせ込む必要があった。しかし、このためには高精度な可動部材が必要となり、高コスト化を招く。 更に、補正の完了までに時間がかかるため、頻繁に補正を行うことができない。 However, the conventional color misregistration control method has two problems. As a first problem, in order to correct the optical path of the optical system, the correction optical system including the light source and the f-θ lens, the mirror in the optical path, and the like are mechanically operated to align the positions of the respective colors. There was a need. However, this requires a highly accurate movable member, which leads to an increase in cost. Furthermore, since it takes time to complete the correction, the correction cannot be performed frequently.
2つ目の問題点として、機内温度の変化などにより光学系や支持部材などに変形が生じるなどして、レジずれ量が経時的に変化することがあり、色ずれ制御を行った直後の高品位な画像を常に保つことが困難である。 The second problem is that the amount of misregistration may change over time due to deformation of the optical system and support member due to changes in the temperature inside the machine. It is difficult to always maintain a quality image.
1つ目の問題点を解決するものとしては、例えば、座標変換手段が、検出されたレジずれ量に基づいて、各色毎の画像データの出力座標位置を、レジずれを補正した出力座標位置に自動変換する方法が提案されている(特許文献1等参照)。 In order to solve the first problem, for example, the coordinate conversion unit converts the output coordinate position of the image data for each color to the output coordinate position in which the registration error is corrected based on the detected registration error amount. A method of automatic conversion has been proposed (see Patent Document 1).
また、レジずれ補正手段は、レジずれ検出用パターン形成時や画像形成時で、記録媒体に対する画像位置補正量の成分のうち(例えば、主走査方向倍率ずれ)、少なくとも1つ以上を変更可能とする方法が提案されている(特許文献2等参照)。
In addition, the registration error correction unit can change at least one or more of the components of the image position correction amount with respect to the recording medium (for example, magnification deviation in the main scanning direction) when forming a registration error detection pattern or forming an image. Has been proposed (see
また、2つ目の問題点を解決するには、機内の温度を検知して一定の温度変化があったときや時間経過に伴い、上述した色ずれ制御を繰り返し行う方法が知られている。 In order to solve the second problem, a method is known in which the above-described color shift control is repeatedly performed when the temperature inside the apparatus is detected and a certain temperature change occurs or as time elapses.
しかし、特許文献1、2記載の技術では、色ずれ制御直後には、色ずれの少ない高品位な画像を形成できるが、時間経過につれ色ずれ量が変化するために、常にこの状態を保つことが困難である。機内温度を検知して色ずれ制御を行うようにしても同様であり常に色ずれが制御されている訳ではない。また、色ずれ量を直接検知していないので、所定の色すれ量に収まるようにタイミングよく正確に色ずれ制御を行うのは困難であり、色ずれ制御の頻度過多や不足になりやすい。
However, with the techniques described in
また、色ずれ検出用のテストパターンを形成して、該テストパターンを検知し、検知結果からずれ量を算出する処理に時間がかかる。そして、該テストパターン形成時には通常の画像が印刷できず、さらには機械的制御を伴う場合には安定動作する補正完了までの時間も印刷できない。よって、高品位な画像形成を保つため頻繁に色ずれ制御を行うと、生産性が低下してしまうという問題が生じる。 Further, it takes time to form a test pattern for color misregistration detection, detect the test pattern, and calculate the misregistration amount from the detection result. When the test pattern is formed, a normal image cannot be printed. Further, when mechanical control is involved, it is not possible to print the time until completion of the stable operation. Therefore, if color misregistration control is frequently performed in order to maintain high-quality image formation, there arises a problem that productivity is lowered.
また、特許文献1、2記載の技術では、機内温度の変化や時間経過や連続画像形成枚数などの情報に基づき実行される1回の色ずれ制御内で、テストパターンの形成と、テストパターンからの色ずれ量検出と、検出された色すれ量に基づき次の色ずれ制御工程が実行されるまでに使用する画像位置補正量の算出とが行われる。このとき色ずれ量検出値に検出誤差やノイズ要因が生じると、誤った(誤差の生じた)画像位置補正量が算出され、次の色ずれ制御工程が実行されるまでは、これに基づいて色ずれの生じた画像が形成されてしまう。そのため検出誤差の低減は不可欠である。そのため、コストをかけて高精度な部品を使用するか、色ずれ検出用のテストパターンを複数組形成して、この複数組の検出値の平均値から色ずれ量を算出することで、検出誤差を低減するようにしている。しかし、この場合、テストパターン長が長くなり通常画像の印刷が出来ない期間も増えるため、色ずれ補正精度向上と引き換えに生産性の低下を招くという第1の問題が生じる。
In the techniques described in
特に、連続印刷中には機内の温度上昇が著しいため色ずれ変化量が大きく、頻繁な色ずれ制御を必要とする。一方、色ずれ制御を高頻度で行うとテストパターン形成及びずれ量検知による印刷できない時間(ダウンタイムと呼ぶ)が多くなってしまうことによる生産性の低下が生じてしまうという第2の問題が生じる。これら第1の問題、第2の問題を同時に解決することは困難であった。 In particular, during continuous printing, the temperature rise in the machine is remarkable, so the amount of change in color shift is large, and frequent color shift control is required. On the other hand, when color misregistration control is performed at a high frequency, a second problem arises in that productivity decreases due to an increase in time during which printing cannot be performed due to test pattern formation and misregistration amount detection (referred to as downtime). . It has been difficult to solve the first problem and the second problem at the same time.
すなわち、色ずれ制御の頻度不足により色ずれ量の変動に対し対応できなかったり、検出誤差やノイズの影響により誤った補正がなされ高品位な画像を形成できないという懸念がある。この懸念を解決するために色ずれ制御の頻度を増やしたり、検出精度向上のためテストパターン長を長くすることで、生産性を低下させていた。さらには、ディジタル印刷機と呼ばれる電子写真方式の印刷機では、常に高品位な画像と高生産性との両立が求められるため、この問題点はより顕著となる。 That is, there is a concern that it is impossible to cope with variations in the amount of color misregistration due to insufficient frequency of color misregistration control, or that a high-quality image cannot be formed due to erroneous correction due to the influence of detection errors and noise. In order to solve this concern, productivity has been reduced by increasing the frequency of color misregistration control or increasing the test pattern length to improve detection accuracy. Furthermore, in an electrophotographic printing press called a digital printing press, it is always necessary to achieve both high-quality images and high productivity, and this problem becomes more prominent.
そこで、本発明は、上記のような問題を鑑みて、生産性を低下させることなく、常に色ずれ補正された高品位な画像を形成する画像形成装置を提供することを目的とする。 In view of the above problems, an object of the present invention is to provide an image forming apparatus that always forms a high-quality image that is corrected for color misregistration without reducing productivity.
上記目的を達成するため、中間転写体と、テストパターンデータを生成する生成部と、色ずれ量を保持する保持部と、現時点での前記保持部に保持されている色ずれ量に基づき、前記テストパターンデータおよび画像データを補正する補正部と、前記補正部により補正された前記テストパターンデータに基づいたテストパターンを所定間隔ごとに前記中間転写体に形成し、かつ、前記補正部により補正された前記画像データに基づいた画像を前記中間転写体に形成する形成部と、前記中間転写体に形成されたテストパターンを検知する検知部と、前記検知部の検知結果から、色ずれ量の変化量を求め、該変化量に第1係数を乗じた値と、該色ずれ量の変化量の積算値に所定の第2係数を乗じた値と、前記保持部に保持されている色ずれ量と、を加算し、色ずれ量を更新する更新部と、を有する画像形成装置を提供する。 In order to achieve the above object, based on the intermediate transfer member, the generation unit that generates test pattern data, the holding unit that holds the color misregistration amount, and the color misregistration amount currently held in the holding unit, A correction unit that corrects test pattern data and image data, and a test pattern based on the test pattern data corrected by the correction unit is formed on the intermediate transfer body at predetermined intervals, and is corrected by the correction unit. Further, a change in color misregistration amount based on a detection unit that forms an image based on the image data on the intermediate transfer member, a detection unit that detects a test pattern formed on the intermediate transfer member, and a detection result of the detection unit. A value obtained by multiplying the change amount by the first coefficient, a value obtained by multiplying the integrated value of the change amount of the color misregistration amount by a predetermined second coefficient, and the color misregistration amount held in the holding unit. When, Summed to provide an image forming apparatus having an updating unit for updating the color misregistration amount.
本発明の画像形成装置によれば、生産性を低下させることなく、常に色ずれの少ない高品質な画像を形成できる。 According to the image forming apparatus of the present invention, it is possible to always form a high-quality image with little color misregistration without reducing productivity.
[用語の説明]
実施例の説明の前に、用語の説明を行う。
[Explanation of terms]
Prior to the description of the embodiments, terms will be described.
画像形成装置とは例えば、プリンタ、ファクシミリ、複写装置、プロッタ、これらの複合機などである。 Examples of the image forming apparatus include a printer, a facsimile, a copying apparatus, a plotter, and a complex machine of these.
また、記録媒体は、例えば、紙、糸、繊維、皮革、金属、プラスチック、ガラス、木材、セラミックスなどの媒体である。以下では、記録媒体を用紙として説明する。 The recording medium is a medium such as paper, thread, fiber, leather, metal, plastic, glass, wood, ceramics. In the following description, the recording medium is assumed to be paper.
画像形成とは、文字や図形、パターンなどの画像を記録媒体や中間転写体に付与することなどをいう。 Image formation refers to the application of images such as characters, figures and patterns to a recording medium or an intermediate transfer member.
また、中間転写体とは、例えば、中間転写ベルトであり、以下の説明では、中間転写体を中間転写ベルトであるとして説明する。
[要部の構成図]
図1に本実施例の画像形成装置の要部の構成図の一例を示す。以下の例では、タンデム方式と称される複数色の画像形成部を有する多色対応の画像形成装置について説明する。また、複数色とは、C(シアン)M(マゼンダ)Y(イエロー)K(ブラック)であるが、これらのうち、少なくとも2つの色を用いればよく、他の色を用いても良い。さらには他の色を追加して5色以上としてもよい。本実施例の画像形成装置では、画像およびテストパターンを中間転写ベルト8に形成するのであるが、該形成の流れを簡単に説明する。
The intermediate transfer member is, for example, an intermediate transfer belt. In the following description, the intermediate transfer member is described as being an intermediate transfer belt.
[Configuration of main part]
FIG. 1 illustrates an example of a configuration diagram of a main part of the image forming apparatus according to the present exemplary embodiment. In the following example, a multicolor image forming apparatus having a plurality of color image forming units called a tandem system will be described. The plurality of colors are C (cyan), M (magenta), Y (yellow), and K (black), but at least two of these colors may be used, and other colors may be used. Furthermore, it is good also as another color and adding 5 colors or more. In the image forming apparatus of this embodiment, an image and a test pattern are formed on the intermediate transfer belt 8, and the flow of the formation will be briefly described.
図1の例では、生成部1、画像パス切替部2、補正部3、書込制御部5、走査光学系6、各色CMYKに対応する像担持体(以下では、「感光体」という。)7K、7M、7C、7Y、中間転写ベルト6、二次転写部9、検知部11などを含む。また、以下では、感光体7K、7M、7C、7Yをまとめていう場合には、感光体7という。
In the example of FIG. 1, the
図1に記載されている各構成部について簡単に説明する。生成部1は、印刷ジョブ制御部13からのパターン出力指示信号(後述する)を受信すると、各色Y、C、M、KごとのテストパターンデータTPDy、TPDc、TPDm、TPDkを生成する。このテストパターンデータは、テストパターンの基となるデータである。また、テストパターンとは、色ずれ検知に用いられるものである。
Each component described in FIG. 1 will be briefly described. Upon receiving a pattern output instruction signal (described later) from the print
画像パス切換部2は、各色Y、C、M、Kごとの画像データVDy、VDc、VDm、VDkと、生成部1から出力されるテストパターンデータTPDy、TPDc、TPDm、TPDkとを切り換えて出力する。画像データVDy、VDc、VDm、VDkは制御部206から転送される。図1では、画像データVDy、VDc、VDm、VDkと、テストパターンデータTPDy、TPDc、TPDm、TPDkとをまとめて、それぞれ21c、21m、21y、21kと示す。画像パス制御部2の切替は、印刷ジョブ制御部13からの切替信号により行われる。
The image
補正部3は、保持部4に保持されている現時点での色ずれ量を用いて、この色ずれ量を打ち消すように、画像パス切換部2の出力する画像データおよびテストパターンデータ21C,21M,21Y,21Kを補正し、補正画像データおよび、補正テストパターンデータ22C,221M,22Y,22Kを出力する。色ずれ量の参照は画像データの先頭で行い1枚(あるいはテストパターン1組)を補正する間は同一の色ずれ量で補正する。この補正方法については後述する。
The
保持部4には、現時点での色ずれ量が保持されている。そして、更新部12が、保持部4内の色ずれ量を更新する。この更新手法について後述する。
The holding
書込制御部5は、各色毎に各色のライン同期信号24C,24M,24Y,24Kから主走査同期信号を生成する。各色のライン同期信号24C,24M,24Y,24Kとは、各色の走査光学系6から入力される、光ビームが所定位置を通過したことを示すものである。主走査同期信号とは、主走査方向の書き出し位置を示す信号である。
The
また、入力される印刷ジョブ開始指示信号あるいはエンジンコントローラ部からの書込み開始指示を基準とし、各感光体間の距離(例えばPyとPcとの距離)と中間転写ベルト8の線速Vとに基づき決定される各色間の時間差により、各色毎に副走査同期信号を生成する。副走査同期信号とは、副走査方向の書き出し位置を示す信号である。そして、書込制御部5内部で生成される画素クロックを基準として、主走査同期信号および副走査同期信号に同期し、各色毎に補正画像データおよび補正テストパターンデータ22C,22M,22Y,22Kから走査光学系6内にある光源の変調信号である書込信号23C,23M,23Y,23Kへと変換する。このようにして、各色の補正画像データは、それぞれ対応する感光体上に顕像化され、中間転写ベルト8上に多重に転写される。
Also, based on the input print job start instruction signal or the write start instruction from the engine controller, the distance between the photosensitive members (for example, the distance between Py and Pc) and the linear velocity V of the intermediate transfer belt 8 are used. A sub-scanning synchronization signal is generated for each color based on the determined time difference between the colors. The sub-scanning synchronization signal is a signal indicating the writing position in the sub-scanning direction. Then, with reference to the pixel clock generated inside the
走査光学系6は、各色の感光体7に対応して備えられる。図1の例では、各色ごとの走査光学系をまとめて走査光学系6として図示する。走査光学系6内の光源は、補正画像データおよび補正テストパターンデータ22C,22M,22Y,22Kについての光ビームをそれぞれの感光体7Y、7C、7M、7Kに走査することで、画像(静電潜像)およびテストパターンをそれぞれの感光体7上に形成する。未図示の現像部は、それぞれの潜像を顕像化する。それぞれの感光体上に顕像化された画像は、一次転写位置(一次転写部)Py、Pc、Pm、Pkで、中間転写ベルト8上に多重に一次転写される。一次転写後、多重に転写された各色の画像は、二次転写部9により用紙10上に一括して二次転写される。そして、定着手段(図示せず)は、記録用紙10上に画像を定着することにより、カラー画像を形成する。これらの動作のタイミング制御は制御部206(またはエンジンコントローラ部)で行われる。
The scanning optical system 6 is provided corresponding to each color photoconductor 7. In the example of FIG. 1, the scanning optical system for each color is collectively shown as a scanning optical system 6. The light source in the scanning optical system 6 scans the respective photoconductors 7Y, 7C, 7M, and 7K with light beams for the corrected image data and the corrected
また、形成部40とは、走査光学系6および感光体7を含む。つまり、形成部40は、補正部で補正された、画像データに基づいた画像およびテストパターンデータに基づいた
テストパターンを中間転写ベルト8に形成する。また、以下で言及する色ずれとは、書込み制御部5以降で生じるものであるとする。
The forming unit 40 includes the scanning optical system 6 and the photoconductor 7. That is, the forming unit 40 forms an image based on the image data and a test pattern based on the test pattern data, corrected by the correcting unit, on the intermediate transfer belt 8. In addition, the color misregistration referred to below is assumed to occur in the
印刷ジョブ制御部13は、印刷ジョブのタイミングを制御するものである。ここで、印刷ジョブとは、画像1個の中間転写ベルト8への形成処理または、テストパターン1組の中間転写ベルト8への形成処理をいう。印刷ジョブ制御部13は、画像印刷要求に伴い印刷ジョブ開始信号を生成、出力する。また、印刷ジョブ制御部13は、画像の印刷ジョブの合間に所定間隔ごとに(後述する)テストパターンの印刷ジョブを挿入し、印刷ジョブ開始信号を生成、出力する。通常画像の印刷ジョブ開始により画像データ転送要求信号を生成し、テストパターンの印刷ジョブ開始によりテストパターン出力指示信号を生成する。また、印刷ジョブ開始信号はエンジンコントローラ部及び書込制御部5にも出力し、これを開始基準として各部でタイミング制御が図られる。
The print
エンジンコントローラ部(未図示)は、これらタイミング制御を含む各部の様々な制御を司る。
[印刷ジョブのタイミング]
図2は、各部における印刷ジョブのタイミングを説明するためのタイミングチャートの一例である。図2の例では、3つの画像形成ごとに、1個のテストパターンを形成する例について説明する。また、図2の(a)〜(h)において、横軸は時間を示す。
An engine controller (not shown) manages various controls of each part including these timing controls.
[Print Job Timing]
FIG. 2 is an example of a timing chart for explaining the timing of a print job in each unit. In the example of FIG. 2, an example in which one test pattern is formed for every three image formations will be described. Moreover, in (a)-(h) of FIG. 2, a horizontal axis shows time.
(a)は印刷ジョブ開始指示信号を表す。TP1、TP2・・・下矢印を付したものは、それぞれ1つ目、2つ目のテストパターンの印刷ジョブの開始時刻を示す。また、V1、V2、V3・・・にそれぞれ下矢印を付したものは、それぞれ1つ目、2つ目、3つ目の画像の印刷ジョブの開始時刻を示す。 (A) represents a print job start instruction signal. TP1, TP2,... With down arrows indicate the start times of the print jobs for the first and second test patterns, respectively. Also, V1, V2, V3... With a down arrow indicate the start time of the print job for the first, second, and third images, respectively.
(b)〜(e)は中間転写ベルト8上の各点での印刷ジョブのタイミングを表す。また、括弧で囲まれた数字は、それぞれ、印刷ジョブ開始信号で説明した、印刷ジョブの開始時刻の「V」に付加した数字と対応する。つまり、印刷ジョブ開始信号V1、V2・・・により、例えば、イエロー色の画像(1)(2)、・・・は、中間転写ベルト8に形成される。 (b) to (e) represent print job timings at respective points on the intermediate transfer belt 8. The numbers enclosed in parentheses correspond to the numbers added to “V” of the start time of the print job described in the print job start signal. In other words, for example, yellow images (1), (2),... Are formed on the intermediate transfer belt 8 by the print job start signals V1, V2,.
(b)はイエローの感光体7Y上に顕像化された画像(トナー画像)が中間転写ベルト8の一次転写位置Pyに転写されるタイミングについて示す。印刷ジョブ開始信号から遅延時間Tdy後にイエローの画像Vyは中間転写ベルト8上に形成される。遅延時間Tdyは、印刷ジョブ開始信号から各部での処理・遅延時間が加算された時間である。 (b) shows the timing at which the image (toner image) visualized on the yellow photoreceptor 7Y is transferred to the primary transfer position Py of the intermediate transfer belt 8. A yellow image Vy is formed on the intermediate transfer belt 8 after a delay time Tdy from the print job start signal. The delay time Tdy is a time obtained by adding the processing / delay time in each unit from the print job start signal.
(c)は、シアンの感光体7C上に顕像化された画像(トナー画像)が中間転写ベルト8の一次転写位置Pcに転写されるタイミングについて示す。印刷ジョブ開始信号から遅延時間Tdc後にシアンの画像Vcは中間転写ベルト8上に形成される。遅延時間Tdcは、以下の式により求められる。 (C) shows the timing at which the image (toner image) visualized on the cyan photoreceptor 7C is transferred to the primary transfer position Pc of the intermediate transfer belt 8. A cyan image Vc is formed on the intermediate transfer belt 8 after a delay time Tdc from the print job start signal. The delay time Tdc is obtained by the following equation.
Tdc=Tdy+(Py−Pc)/V
ただし、(Py−Pc)は、一次転写位置Py、Pc間の距離を示し、Vは、中間転写ベルト8の線速を示す。
Tdc = Tdy + (Py−Pc) / V
However, (Py−Pc) indicates the distance between the primary transfer positions Py and Pc, and V indicates the linear velocity of the intermediate transfer belt 8.
(d)は、マゼンダの感光体7M上に顕像化された画像(トナー画像)が中間転写ベルト8の一次転写位置Pmに転写されるタイミングについて示す。印刷ジョブ開始信号から遅延時間Tdm後にマゼンダの画像Vmは中間転写ベルト8上に形成される。遅延時間Tdmは、以下の式により求められる。 (D) shows the timing at which the image (toner image) visualized on the magenta photoreceptor 7M is transferred to the primary transfer position Pm of the intermediate transfer belt 8. A magenta image Vm is formed on the intermediate transfer belt 8 after a delay time Tdm from the print job start signal. The delay time Tdm is obtained by the following equation.
Tdm=Tdy+(Py−Pm)/V
ただし、(Py−Pm)は、一次転写位置Py、Pm間の距離を示す。
Tdm = Tdy + (Py−Pm) / V
However, (Py−Pm) indicates the distance between the primary transfer positions Py and Pm.
(e)は、ブラックの感光体7K上に顕像化された画像(トナー画像)が中間転写ベルト8の一次転写位置Pmに転写されるタイミングについて示す。印刷ジョブ開始信号から遅延時間Tdk後にブラックの画像Vkは中間転写ベルト8上に形成される。遅延時間Tdkは、以下の式により求められる。 (E) shows the timing at which the image (toner image) visualized on the black photoreceptor 7K is transferred to the primary transfer position Pm of the intermediate transfer belt 8. A black image Vk is formed on the intermediate transfer belt 8 after a delay time Tdk from the print job start signal. The delay time Tdk is obtained by the following equation.
Tdk=Tdy+(Py−Pk)/V
ただし、(Py−Pk)は、一次転写位置Py、Pk間の距離を示す。
Tdk = Tdy + (Py−Pk) / V
However, (Py−Pk) indicates the distance between the primary transfer positions Py and Pk.
(f)は検知部(センサ)11の検出点(検出位置)Psでのテストパターン通過タイミングを表す。イエローの一次転写位置Pyと、検出点Psとの間の距離に応じて印刷ジョブ開始時刻からテストパターン通過時刻までの時間が決まる。また、テストパターンの通過タイミング付近以外では検知部11が動作を停止させるようにしておくと、誤検出防止及び省電力となる。この検知部11の動作の停止は、制御部206(またはエンジンコントローラ部)により行われる。
(F) represents the test pattern passage timing at the detection point (detection position) Ps of the detection unit (sensor) 11. The time from the print job start time to the test pattern passage time is determined according to the distance between the yellow primary transfer position Py and the detection point Ps. Further, if the
(g)は検知部11によるテストパターンの検知が完了する時刻を表し、色ずれ量のサンプリング点に相当する。印刷ジョブ開始時刻からの遅延時間Tdsは、以下の式により求められる。
Tds=Tdy+(Py−Ps+L)/V
ただし、Lは、テストパターンの長さを示す。その後、色ずれ量の演算時間τ後に新しい色ずれ量に更新される。この更新については後述する。時間Tds+τが、テストパターンの印刷ジョブ開始時刻から色ずれ量更新までの時間となる。
(G) represents the time when the detection of the test pattern by the
Tds = Tdy + (Py−Ps + L) / V
Here, L indicates the length of the test pattern. Thereafter, the color misregistration amount is updated to a new color misregistration amount after a calculation time τ. This update will be described later. The time Tds + τ is the time from the test pattern print job start time to the color misregistration amount update.
(h)は二次転写部9における、印刷ジョブのタイミングである。二次転写部9は、中間転写ベルト1上に重畳形成された画像を用紙10に転写(二次転写)する。
(H) is the timing of the print job in the secondary transfer unit 9. The secondary transfer unit 9 transfers (secondary transfer) the image superimposed on the
なお、図2中の時間Tsについては後述する。 The time Ts in FIG. 2 will be described later.
図3に、中間転写ベルト8を上方から垂直方向に見た図を示す。図3では、中間転写ベルト8上に形成された画像及びテストパターンや、検知部(センサー)11の位置なども示す。また、以下の説明では、中間転写ベルト8の移動方向を副走査方向とする。また、中間転写ベルト8上での画像形成の際に、画像が走査される方向を主走査方向という。主走査方向をx軸方向とし、副走査方向をy軸方向とする。 FIG. 3 shows a view of the intermediate transfer belt 8 as viewed from above in the vertical direction. 3 also shows an image and a test pattern formed on the intermediate transfer belt 8, the position of the detection unit (sensor) 11, and the like. In the following description, the moving direction of the intermediate transfer belt 8 is the sub-scanning direction. The direction in which an image is scanned when forming an image on the intermediate transfer belt 8 is referred to as a main scanning direction. The main scanning direction is the x-axis direction, and the sub-scanning direction is the y-axis direction.
斜線を付した領域51は画像形成領域である。画像形成領域とは、中間転写ベルト8の全領域のうち、画像が形成される領域である。また、画像形成領域に付した括弧で囲った数字(1)〜(3)は、図2で説明した(1)〜(3)に対応する。
A hatched
また、図2の例では検知部11は主走査方向一列に3つ配置される。これら3つの検知部をそれぞれ11a、11b、11cとする。また、52a、52b、52cはそれぞれテストパターンが形成される領域(以下、「テストパターン形成領域」という。)であり、主走査方向の位置は検知部11a、11b、11c位置(図2では一点鎖線a、b、cで示す)に対応(対向)している。テストパターン形成領域は、画像形成領域外に設定される。もし、テストパターン形成領域が、画像形成領域内に設定されると、二次転写部11において、用紙10にテストパターンが転写されるからである。
In the example of FIG. 2, three
ここで、本実施例の画像形成装置の形成部40(図1参照)は、所定間隔ごとにテストパターンを形成する。そして、所定間隔について更に詳細に説明する。
[所定間隔(その1)]
所定間隔(その1)を、所定個数の画像間の間隔とする。図3に実線で示すように、テストパターンTPは、副走査方向において、所定個数の画像間(画像形成領域51の間(いわゆる紙間))に形成される。図3の例では、所定個数とは3個である。つまり、図3の例では、3個の画像ごとに、テストパターンは形成される。そして、所定個数(3個)の画像をおいて、画像間に次のテストパターン53a、53b、53cが形成される。この間隔は厳密に一定距離である必要はなく、その付近の画像間に挿入するよう印刷ジョブが制御される。つまり図3の例では、画像の所定個数ごとに、テストパターンは形成される。
[所定間隔(その2)]
所定間隔(その2)を所定時間の間隔とする。テストパターンは、画像形成領域外であれば、どこに形成してもよい。例えば、破線54a、54cに示すように、テストパターンを中間転写ベルト8上の主走査方向両端に形成するようにしても良い。この場合、検知部11はその主走査位置に対応して、55a、55cの位置に配置される。テストパターンを中間転写ベルト8上の主走査方向両端に形成するようにすれば、画像間を開ける必要がなく、生産性を向上させることが出来る。また、テストパターン形成間隔も自由に選択できる。
[所定間隔(その3)]
所定間隔(その3)を所定個数の画像間の間隔であり、かつ、所定時間の間隔とする。例えば、形成される画像のサイズがそれぞれ異なる場合、例えば、画像サイズが、A4.A3、A4・・・などと形成される場合には、所定時間ごとであり、かつ、画像の所定個数ごとに、テストパターンを形成すると、更に好ましい。
[テストパターンの構成]
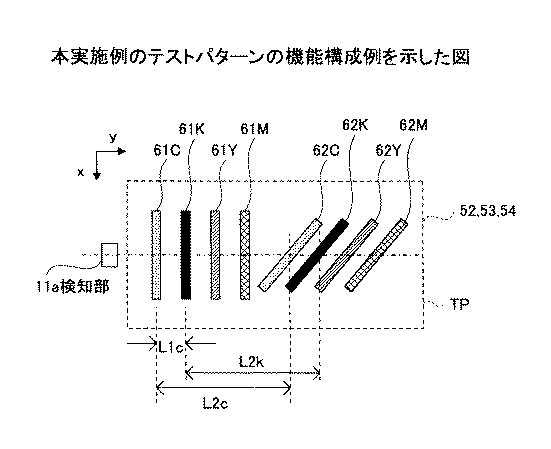
次に、テストパターンの構成例について説明する。図4に、テストパターンの構成例を示す。図4の例では、主走査方向と平行な直線パターン61と、主走査方向と45度の角をなす斜線パターン62を一つのテストパターンTPとする。これが各色(例えばC,K,Y,M)順に副走査方向に並んでいる。つまり、直線パターン61C、61K、61Y、61M、斜線パターン62C、62K、62Y、62Mの順番で並んでいる。これらのテストパターンTPを主走査方向に複数(図3の例では3箇所、52a〜cおよび53a〜c)それぞれに形成して、1組のテストパターンとする。図4中のL1c、L2k、L2cについては後述する。
[検知部11の構成]
次に、検知部11の構成について説明する。図5に検知部11の構成例を示す。検知部11は、発光部65と受光部66とを一対として構成される。発光部65は中間転写ベルト8に対して、光を照射する。そして、受光部66は、中間転写ベルト8で反射された反射光を受光し、該受光を電気信号に変換する。中間転写ベルト8上にテストパターンが形成されていない(トナーがない)状態では反射光量は強いが、テストパターンが形成されている(トナーが存在する)と照射光が散乱するため受光部66で受光する反射光量が減る。また、反射光量についての閾値を予め定めておく。検知部11は、反射光量が、該閾値より大きければ、テストパターンは形成されていないと判断し、該閾値より小さければ、テストパターンは形成されていると判断するようにする。このようにして、検知部11は、テストパターンの有無が検出できる。
Here, the forming unit 40 (see FIG. 1) of the image forming apparatus according to the present embodiment forms test patterns at predetermined intervals. The predetermined interval will be described in more detail.
[Predetermined interval (part 1)]
The predetermined interval (part 1) is an interval between a predetermined number of images. As shown by a solid line in FIG. 3, the test pattern TP is formed between a predetermined number of images (between the image forming regions 51 (so-called paper interval)) in the sub-scanning direction. In the example of FIG. 3, the predetermined number is three. That is, in the example of FIG. 3, a test pattern is formed for every three images. Then, with the predetermined number (three) of images, the
[Predetermined interval (2)]
The predetermined interval (No. 2) is set as the predetermined time interval. The test pattern may be formed anywhere as long as it is outside the image forming area. For example, test patterns may be formed at both ends in the main scanning direction on the intermediate transfer belt 8 as indicated by
[Predetermined interval (part 3)]
The predetermined interval (No. 3) is an interval between a predetermined number of images and an interval of a predetermined time. For example, when the sizes of the formed images are different, for example, the image size is A4. When formed as A3, A4, etc., it is more preferable to form a test pattern every predetermined time and every predetermined number of images.
[Configuration of test pattern]
Next, a configuration example of the test pattern will be described. FIG. 4 shows a configuration example of the test pattern. In the example of FIG. 4, a straight line pattern 61 parallel to the main scanning direction and a diagonal line pattern 62 that forms an angle of 45 degrees with the main scanning direction are defined as one test pattern TP. These are arranged in the sub-scanning direction in the order of each color (for example, C, K, Y, M). That is, the
[Configuration of Detection Unit 11]
Next, the configuration of the
そして受光部66が出力する電気信号(検知部出力信号)を、更新部12(図1参照)内のA/D変換器などがデジタル信号に変換する。そして、更新部12内の信号処理部が、該デジタル信号を信号処理することにより、各パターン61、62の中心が検知部11の位置を通過した時間などを求める。
[実施形態1]
次に、本実施例の実施形態1について説明する。また、本実施例において、色ずれ量の構成要素として、スキューずれd、主走査方向倍率ずれa、主走査方向レジストずれc、副走査方向レジストずれf、のうち、少なくとも1つを含むものであればよい。ただし、d、a、c、fは実数であるとする。また、色ずれ量の構成要素として、他の要素を含んでいても良い。また、「ずれ」とは誤差を意味する。以下の説明での色ずれ量は、スキューずれd、主走査方向倍率ずれa、主走査方向レジストずれc、副走査方向レジストずれfの全てを含むものとして説明する。
Then, the electrical signal (detection unit output signal) output from the
[Embodiment 1]
Next,
「スキューずれ」とは、「中間転写ベルト8上に形成された画像やテストパターンが、所定の傾きを持ってしまうことから生じるずれ」をいう。「主走査方向倍率ずれ」とは「画像の倍率を変更した場合の主走査方向のずれ」をいう。「主走査方向レジストずれ」とは、「理想的な走査線に対し、主走査方向の平行方向のずれ」をいう。「副走査方向レジストずれ」とは、「理想的な走査線に対し、副走査方向の平行方向のずれ」をいう。 “Skew deviation” means “deviation caused by an image or test pattern formed on the intermediate transfer belt 8 having a predetermined inclination”. “Main scanning direction magnification deviation” refers to “main scanning direction deviation when the magnification of an image is changed”. “Registration deviation in the main scanning direction” means “deviation in the parallel direction of the main scanning direction with respect to an ideal scanning line”. “Sub-scanning direction registration deviation” refers to “parallel deviation in the sub-scanning direction with respect to an ideal scanning line”.
また、主走査方向の倍率ずれにおいて、主走査方向の全体倍率はa'=1+aで表される。つまり、以下の説明では、a'、c、d、fが、色ずれ量の構成要素となる。また、a'、c、d、fは更新されるのであるが、N回(Nは自然数)更新されたものをそれぞれa'N、cN、dN、fNとする。 Further, in the magnification shift in the main scanning direction, the overall magnification in the main scanning direction is represented by a ′ = 1 + a. That is, in the following description, a ′, c, d, and f are components of the color misregistration amount. Further, although a ′, c, d, and f are updated, those that are updated N times (N is a natural number) are denoted as a ′ N , c N , d N , and f N , respectively.
図6に実施形態1の画像形成装置の処理フローを示す。図6を用いて、実施形態1の画像形成装置の処理を説明する。なお、図6記載のフローは各色(C、M、Y、K)それぞれについて実行される。
<ステップS101>
ステップS101では、色ずれ量の初期値a'0、c0、d0、f0を設定する。設定された色ずれ量の初期値a'0、c0、d0、f0は保持部4(図1参照)に保持される。初期値の設定手法は様々ある。例えば、初期値を色ずれ量なしとして、a'0=1、c0=0、d0=0、f0=0としてもよい。また、前回使用時の色ずれ量を保持部4に保持させておき、該保持された色ずれ量を初期値としても良い。また、色ずれ量を補正せずにテストパターンを形成して、このテストパターンの検出結果から上述したように色ずれ量を算出する色ずれ量初期値検出ステップを含み、これを初期値として設定しても良い。色ずれ量の補正については後述する。また、この色ずれ量初期値検出ステップでは、テストパターンを複数組形成して検出した結果の平均を色ずれ量の初期値とし、誤差を平滑化するようにしても良い。
<ステップS102>
ステップS102では、補正部3が、保持部4に保持されている現時点での色ずれ量に基づき、テストパターンデータ及び画像データを補正する。ここで、補正部3による補正と、色ずれ量の関係について説明する。
FIG. 6 shows a processing flow of the image forming apparatus according to the first embodiment. Processing of the image forming apparatus according to the first embodiment will be described with reference to FIG. Note that the flow shown in FIG. 6 is executed for each color (C, M, Y, K).
<Step S101>
In step S101, initial values a ′ 0 , c 0 , d 0 , and f 0 of color misregistration amounts are set. Initial values a ′ 0 , c 0 , d 0 , f 0 of the set color misregistration amounts are held in the holding unit 4 (see FIG. 1). There are various initial value setting methods. For example, the initial value may be a color misregistration amount, and a ′ 0 = 1, c 0 = 0, d 0 = 0, and f 0 = 0. Alternatively, the color shift amount at the previous use may be held in the holding
<Step S102>
In step S <b> 102, the
補正部3に入力される画像データVD及びテストパターンデータTPDの座標系を(x、y)とする。また、補正部3により補正された画像データVD'及びテストパターンデータTPD'の座標系を(x'、y')とする。また、中間転写ベルト8上に形成される画像およびテストパターンの座標系を(x''、y'')とする。なお、x、x'、x''は、主走査方向の座標であり、y、y'、y''は副走査方向の座標である。
The coordinate system of the image data VD and test pattern data TPD input to the
そうすると、(x'、y')と(x''、y'')の関係は以下の式(1)で表すことができる。
x''=a'x'+0y+c
y''=dx'+1y+f (1)
また、式(1)を行列を用いて、以下の式(2)で表すことができる。
Then, the relationship between (x ′, y ′) and (x ″, y ″) can be expressed by the following equation (1).
x ″ = a′x ′ + 0y + c
y ″ = dx ′ + 1y + f (1)
Moreover, Formula (1) can be represented by the following Formula (2) using a matrix.
そこで、補正部3は、式(4)に示すように、色ずれ変換行列Aの逆行列A−1を用いて座標(x、y)を補正する。逆行列A−1を補正行列という。
Therefore, the
<ステップS103>
ステップS103では、検知部11が、テストパターンTPを検知する(図5の説明参照)。そして、更新部12が、検知部11からの出力信号をサンプリングする。更新部12のサンプリングは、図2で説明した印刷ジョブ開始信号に従って、定められる。そのタイミングまでは、このステップS103で待機となる。そして、更新部12は、隣接するテストパターン間の距離(図4参照)などを求める。
<ステップS104>
ステップS104では、更新部12は、色ずれ量の変化量を求める。今回は1回目の色ずれ量の変化量を求める演算であるので、色ずれ量の初期値a'0、c0、d0、f0からの変化量を求める。N回目の変化量(つまり、N個目のテストパターンを用いて求められた変化量)をそれぞれ、Δa'N、ΔcN、ΔdN、ΔfN、とする。今回は1回目の変化量の演算であるので、Δa'1、Δc1、Δd1、Δf1となる。
<Step S103>
In step S103, the
<Step S104>
In step S104, the
次に、色ずれ量の変化量の求め方について説明する。 Next, how to determine the amount of change in color misregistration amount will be described.
以下の例では、ブラック(K)を基準とした各色(C,M,Y)の色ずれ量の変化量の演算方法を説明する。また、パターンの構成例を図4である場合について説明する。基準色Kの横線パターン61Kと対象色(例えばC)の横線パターン61Cとの測定された距離をL1cとする。M,Yも同様にL1m,L1y(未図示)とする。また、同色の横線パターン61と斜線パターン62との測定された距離をL2とし添え字にその色を表す。例えばシアンであればL2cとし、ブラックであればL2kとする。また、単位はmmとする。
In the following example, a method for calculating the amount of change in color misregistration amount for each color (C, M, Y) with reference to black (K) will be described. An example of the pattern configuration will be described with reference to FIG. Let L1c be the measured distance between the
また、基準色Kの横線パターン61Kと対象色(例えばC)の横線パターン61Cとの理想的な距離(つまり、生成部1が出力するパターン間の距離)をL1refとする。KとYの横線パターン間の距離も同一でありL1refとし、KとMとの横線パターン間の距離はその倍で2L1refとなる。
Further, an ideal distance between the
さらに、検知部11a、11b,11cそれぞれで測定される上記の距離をそれぞれ「_a」,「_b」,「_c」を付けて区別する。例えば、検知部11aで検知した、直線パターン61Cと61Kとの距離は、L1c_aとなる。また、検知部11aで検知した、直線パターン61Kと斜線パターン62Kとの距離は、L2k_aとなる。また、検知部11aと検知部11c間の距離をLacとする。このように測定された距離を用いて、色ずれ量の各成分の演算は以下のように表せる。
(スキューずれ)
各色(C,M,Y)のブラック(K)に対するスキューずれd(C)、d(M)、d(Y)の変化量Δd(C)、Δd(M)、Δd(Y)はそれぞれ以下の式で表される。これらの式をまとめて(式6)とする。ただし、Lacは、検知部11aと検知部11cとの距離を示し、予め定められているものである。
Δd(C)= (L1c_c-L1c_a)/Lac
Δd(M)= (L1m_c-L1m_a)/Lac
Δd(Y)= (L1y_c-L1y_a)/Lac (6)
(副走査方向のレジストずれ)
各色(C,M,Y)のブラック(K)に対する副走査方向のレジストずれf(C)、f(M)、f(Y)の変化量Δf(C)、Δf(M)、Δf(Y)はそれぞれ以下の式で表される。これらの式をまとめて(式7)とする。
Δf(C)=((0.25・L1c_a +0.5・L1c_b +0.25・L1c_c)-L1ref)・κ
Δf(M)= ((0.25・L1m_a +0.5・L1m_b +0.25・L1m_c)-2・L1ref)・κ
Δf(Y)= ((0.25・L1y_a +0.5・L1y_b +0.25・L1y_c)-L1ref)・κ (7)
ここで、κは距離の単位を[mm]から[dot]に変換する係数で、例えば画像データが1200dpiとすると、κ=1200/25.4である。
(主走査方向の倍率ずれ)
各色(C,M,Y)のブラック(K)に対する主走査方向の倍率ずれa(C)、a(M)、a(Y)の変化量Δa(C)、Δa(M)、Δa(Y)はそれぞれ以下の式で表される。これらの式をまとめて式(8)とする。
Δa(C)= ((L2c_c-L2k_c)-(L2c_a-L2k_a))/Lac
Δa(M)= ((L2m_c-L2k_c)-(L2m_a-L2k_a))/Lac
Δa(Y)= ((L2y_c-L2k_c)-(L2y_a-L2k_a))/Lac (8)
(主走査方向のレジストずれ)
各色(C,M,Y)のブラック(K)に対する主走査方向のレジストずれc(C)、c(M)、c(Y)の変化量Δc(C)、Δc(M)、Δc(Y)はそれぞれ以下の式で表される。これらの式をまとめて式(9)とする。
Δc(C)= ((L2c_a-L2k_a)-Lbd・a(C))・κ
Δc(M)= ((L2m_a-L2k_a)-Lbd・a(M))・κ
Δc(Y)= ((L2y_a-L2k_a)-Lbd・a(Y))・κ (9)
ここで、式(9)中のLbdについて説明する。走査光学系6(図1参照)内に、各色毎に同期検知センサが備えられている。同期検知センサは、光ビームが通過した時にライン同期信号24Y、24C、24M、24Kを生成するものである。Lbdは、この同期検知センサと検知部11aとの距離を示すものであり、予め定められているものである。また、Lbd・a(C)の項は主走査方向の同期位置となる同期検知センサから検知部11aまで走査する期間に、主走査方向の倍率ずれによって生じる位置ずれをレジストずれから減じて校正する項である。
Further, the distances measured by the
(Skew deviation)
Changes Δd (C), Δd (M), and Δd (Y) of skew deviations d (C), d (M), and d (Y) with respect to black (K) of each color (C, M, Y) are as follows. It is expressed by the following formula. These equations are collectively referred to as (Equation 6). However, Lac shows the distance between the
Δd (C) = (L1c_c-L1c_a) / Lac
Δd (M) = (L1m_c-L1m_a) / Lac
Δd (Y) = (L1y_c-L1y_a) / Lac (6)
(Registration deviation in the sub-scanning direction)
Amounts of change Δf (C), Δf (M), Δf (Y of registration deviations f (C), f (M), f (Y) in the sub-scanning direction with respect to black (K) of each color (C, M, Y) ) Is represented by the following formulas. These equations are collectively referred to as (Equation 7).
Δf (C) = ((0.25 · L1c_a + 0.5 · L1c_b + 0.25 · L1c_c) -L1ref) · κ
Δf (M) = ((0.25 ・ L1m_a +0.5 ・ L1m_b +0.25 ・ L1m_c) -2 ・ L1ref) ・ κ
Δf (Y) = ((0.25 ・ L1y_a +0.5 ・ L1y_b +0.25 ・ L1y_c) -L1ref) ・ κ (7)
Here, κ is a coefficient for converting the unit of distance from [mm] to [dot]. For example, when the image data is 1200 dpi, κ = 1200 / 25.4.
(Magnification deviation in the main scanning direction)
Variations Δa (C), Δa (M), Δa (Y of magnification shifts a (C), a (M), a (Y) in the main scanning direction with respect to black (K) of each color (C, M, Y) ) Is represented by the following formulas. These expressions are collectively referred to as Expression (8).
Δa (C) = ((L2c_c-L2k_c)-(L2c_a-L2k_a)) / Lac
Δa (M) = ((L2m_c-L2k_c)-(L2m_a-L2k_a)) / Lac
Δa (Y) = ((L2y_c-L2k_c)-(L2y_a-L2k_a)) / Lac (8)
(Registration deviation in the main scanning direction)
Amount of change Δc (C), Δc (M), Δc (Y of registration deviations c (C), c (M), c (Y) in the main scanning direction with respect to black (K) of each color (C, M, Y) ) Is represented by the following formulas. These equations are collectively referred to as equation (9).
Δc (C) = ((L2c_a-L2k_a) -Lbd ・ a (C)) ・ κ
Δc (M) = ((L2m_a-L2k_a) -Lbd ・ a (M)) ・ κ
Δc (Y) = ((L2y_a-L2k_a) -Lbd ・ a (Y)) ・ κ (9)
Here, Lbd in the formula (9) will be described. In the scanning optical system 6 (see FIG. 1), a synchronization detection sensor is provided for each color. The synchronization detection sensor generates line synchronization signals 24Y, 24C, 24M, and 24K when the light beam passes. Lbd indicates the distance between the synchronization detection sensor and the
また、テストパターンを54の位置(図3参照)に形成する場合は、副走査方向のレジストずれについては、式(7)を以下の式(7')に変えればよく、他の各ずれ成分(スキューずれ、主走査方向倍率ずれ、主走査方向レジストずれ、)は同一式で求められる。
f(C)=f(M)=f(Y)=((0.5・L1c_a + 0.5・L1c_c)-L1ref)・κ (7')
式(6)(7)(7')(8)(9)で用いられる値のうち、予め定められている値(例えば、Lacなど)以外の全ての値をまとめて、「更新必要値」という。更新必要値とは、予め定められない値であり、例えば、L1c_cなどである。これらの求め方の手法の一例を、L1c_cを例にして説明する。
Further, when the test pattern is formed at the position 54 (see FIG. 3), the registration deviation in the sub-scanning direction may be changed from the expression (7) to the following expression (7 ′), and other deviation components. (Skew deviation, main scanning direction magnification deviation, main scanning direction registration deviation) can be obtained by the same equation.
f (C) = f (M) = f (Y) = ((0.5 · L1c_a + 0.5 · L1c_c) −L1ref) · κ (7 ′)
Of the values used in the formulas (6), (7), (7 ′), (8), and (9), all values other than a predetermined value (for example, Lac) are collected and “update required value” is collected. That's it. The update necessary value is a value that is not determined in advance, and is, for example, L1c_c. An example of a method for obtaining these will be described by taking L1c_c as an example.
検知部11cは、直線パターン61cを検知した時刻と、直線パターン61kを検知した時刻と、の差である時間sを求める。そして、更新部12が、中間転写ベルト8の線速Vに、時間sを乗算することで、L1c_cを求めることができる。また、他の値についても同様に求めることができる。このようにして、全ての更新必要値は、ステップS103で求められる。
The
また、図4以外のテストパターンの構成である場合には、適宜、色ずれ量の変化量の求め方は変更される。
<ステップS105>
ステップS105では、更新部12は、ステップS104で求められた色ずれ量の変化量を用いて、保持部4で保持されている直近の色ずれ量を更新する。更新の手法は様々あるが、ここでは、3つの手法を説明する。また、以下の3つの更新手法では、色ずれ量の各構成要素のうち、主走査方向倍率ずれaの更新手法のみについて説明するが、他の構成要素であるスキューずれd、主走査方向レジストずれc、副走査方向レジストずれfについても、同様の式で更新させることができる。また、全ての色C,M、Y、Kについて、色ずれ量の更新は行われる。
(第1の更新手法)
まず第1の更新手法について説明する。第1の更新手法では、以下の式(10)のように、保持部4に保持されている直近の(前回の)色ずれ量に、今回求められた色ずれ量の変化量を加算することで、色ずれ量を更新させる。
an=an−1+Δan (10)
ただし、an、an−1は、それぞれn回目、n−1回目の更新により求められた色ずれ量の主走査方向の倍率ずれである。また、ΔanはN回目に求められた色ずれ量の主走査方向の倍率ずれの変化量である。また、今回の更新は1回目の更新(n=1)であることから、初期値a0は以下の式(10')により更新され、a1が算出される。
a1=a0+Δa1 (10')
(第2の手法)
1組のテストパターンから算出した色ずれ量には、テストパターン形成時の誤差、あるいはセンサの読取り誤差などが含まれることがある。従って、式(10)のように、初期値a0と色ずれ量の変化量Δa1を単純に加算するだけでは、テストパターン形成時の誤差、あるいはセンサの読取り誤差などの誤差(以下、「ノイズ」という。)に反応して演算される色ずれ量がばらついてしまう場合がある。このノイズを制限するために、下式(11)のように、色ずれ量の変化値に所定の係数Kpを掛けた値を加算し新しい色ずれ量a(n)を計算する。この式(11)の演算により、ノイズ成分が平滑化されるため高精度に色ずれ量が求められる。なお、Kpは比例ゲイン係数であり、予め定められる定数である。
an=an−1+Kp・Δan (11)
また、今回の更新は1回目の更新であることから、初期値a0は以下の式(11')により更新され、a1が算出される。
a1=a0+Kp・Δa1 (11')
式(11)(11')を用いて、更新することで、ノイズが平滑化されるために、高精度に色ずれ量を更新することができる。
(第3の更新手法)
次に第3の更新手法について説明する。第3の更新手法では、以下の式(12)のように、更新部12は、今回求められた色ずれ量の変化量に所定の第1係数Kpを乗じた値と、今回求められた色ずれ量の変化量の積算値に所定の第2係数Kiを乗じた値と、保持部4に保持されている直近の色ずれ量と、を加算することで、色ずれ量を更新する。いわゆるPI制御により、色ずれ量を更新する。
In the case of a test pattern configuration other than that shown in FIG. 4, the method for obtaining the amount of change in color misregistration is changed as appropriate.
<Step S105>
In step S105, the updating
(First update method)
First, the first update method will be described. In the first update method, the amount of change in the color misregistration amount obtained this time is added to the most recent (previous) color misregistration amount held in the holding
a n = a n-1 + Δa n (10)
However, a n and a n−1 are magnification shifts in the main scanning direction of the color shift amounts obtained by the nth update and the n−1th update, respectively. Further, .DELTA.a n is the amount of change of the magnification deviation in the main scanning direction of the N-th color shift amount determined in the. In addition, since the current update is the first update (n = 1), the initial value a 0 is updated by the following equation (10 ′), and a 1 is calculated.
a 1 = a 0 + Δa 1 (10 ′)
(Second method)
The amount of color misregistration calculated from a set of test patterns may include errors at the time of test pattern formation or sensor reading errors. Therefore, as shown in the equation (10), simply adding the initial value a 0 and the amount of change Δa 1 in the color misregistration amount simply causes an error such as an error when forming a test pattern or a sensor reading error (hereinafter, “ The amount of color misregistration calculated in response to “noise” may vary. In order to limit this noise, a new color misregistration amount a (n) is calculated by adding a value obtained by multiplying the change value of the color misregistration amount by a predetermined coefficient Kp as shown in the following equation (11). Since the noise component is smoothed by the calculation of the equation (11), the color misregistration amount is obtained with high accuracy. Kp is a proportional gain coefficient and is a predetermined constant.
a n = a n−1 + Kp · Δa n (11)
Since the current update is the first update, the initial value a 0 is updated by the following equation (11 ′), and a 1 is calculated.
a 1 = a 0 + Kp · Δa 1 (11 ′)
Since the noise is smoothed by updating using the equations (11) and (11 ′), the color misregistration amount can be updated with high accuracy.
(Third update method)
Next, the third update method will be described. In the third update method, as shown in the following equation (12), the
また、今回の更新は1回目の更新であることから、初期値a0は以下の式(12')により更新され、a1が算出される。
a1=a0+Kp・Δa1+Ki・Δa1 (12')
ここで、Kpは比例ゲイン係数、Kiは積分ゲイン係数、であり予め定められる値である。KpとKiのゲイン係数により制御帯域が決まり、この制御帯域より高周波成分のノイズが制限される。つまり、第3の更新手法を用いると、複数組のテストパターンを形成しなくても良いという効果を奏する。更に、複数のテストパターンについての色ずれ量の変化量の平均値を求める必要がなくなり、1組の短いテストパターンでも十分精度良く色ずれ量が求められるという効果も奏する。色ずれ量の変化量Δanの積算値も反映しているので、定常誤差を低減できる。
Further, since the current update is the first update, the initial value a 0 is updated by the following equation (12 ′), and a 1 is calculated.
a 1 = a 0 + Kp · Δa 1 + Ki · Δa 1 (12 ′)
Here, Kp is a proportional gain coefficient, and Ki is an integral gain coefficient, which is a predetermined value. The control band is determined by the gain coefficients of Kp and Ki, and noise of high frequency components is limited from this control band. That is, when the third update method is used, there is an effect that it is not necessary to form a plurality of sets of test patterns. Furthermore, there is no need to obtain the average value of the amount of change in color misregistration for a plurality of test patterns, and there is also an effect that the amount of color misregistration can be obtained with sufficient accuracy even with one set of short test patterns. Since even reflect the integrated value of change amounts .DELTA.a n of the color shift amount can be reduced steady-state error.
また、この制御帯域は、以下の変動に対して追従して色ずれ量が求められる。ここでは温度変化などによる緩やかな変動に対して追従するよう色ずれ量を求めればよい。従って、例えばサンプリング周期を数秒オーダーとすれば、制御帯域はサンプリング周期の数十分の1〜数百分の1でよく、こうなるように第1係数Kp及び第2係数Kiを定めればよい。 In addition, this control band follows the following fluctuation to obtain a color misregistration amount. Here, the color misregistration amount may be obtained so as to follow a gradual change due to a temperature change or the like. Therefore, for example, if the sampling period is on the order of several seconds, the control band may be 1 to several hundredths of a few tenths of the sampling period, and the first coefficient Kp and the second coefficient Ki may be determined so as to be like this. .
また、第1係数Kpおよび第2係数Kiは、色ずれ量の各成分の演算ごとに異なるようにすることが好ましい。換言すれば、a,c,d,fの各要素ごとに要求される制御帯域が異なるのであれば(例えば温度変化に敏感な要素があれば)、その要素に対するKp,Kiのみ変える。また、各要素に対するKp,Kiを変えて制御帯域を互いに異なるようにしてもよい。このようにすることで、各要素の色ずれ量の更新処理において、互いに干渉することを防ぐことができ、さらに正確な、色ずれ量の更新を行うことができる。 Further, it is preferable that the first coefficient Kp and the second coefficient Ki differ for each calculation of each component of the color misregistration amount. In other words, if the required control band is different for each of the elements a, c, d, and f (for example, if there is an element sensitive to temperature change), only Kp and Ki for that element are changed. Further, the control bands may be different from each other by changing Kp and Ki for each element. By doing so, it is possible to prevent interference with each other in the process of updating the color misregistration amount of each element, and it is possible to update the color misregistration amount more accurately.
また、第1の更新手法、第2の更新手法以外の更新手法を用いても良い。そして、更新部12は、更新された色ずれ量を、保持部4に保持されている直近の色ずれ量を、求められた色ずれ量に更新する。
[2回目以降の更新処理]
<ステップS102>
ステップS105の1回目の更新処理が終了すると、ステップS102に戻る。そして、補正部3は、更新された色ずれ量(現時点での色ずれ量)に基づき、入力された画像データおよびテストパターンデータを、式(4)を用いて補正する。補正行列A−1を構成する各要素であるa'、c、d、fはステップS105で更新された値を用いる。そして、形成部40は、補正された画像データおよびテストパターンに基づいた画像及びテストパターンを中間転写ベルト8上に形成する。
Further, an update method other than the first update method and the second update method may be used. Then, the
[Second and subsequent update processing]
<Step S102>
When the first update process in step S105 ends, the process returns to step S102. Then, the
そして、ステップS103で、中間転写ベルト8上に形成されたテストパターンを検知する。 In step S103, the test pattern formed on the intermediate transfer belt 8 is detected.
また、ステップS104で、ステップS103で求められた更新必要値(例えば、L1c_c)などを用いて、上記式(6)(7)(または(7'))(8)(9)により色ずれ量の変化量が求められる。 In step S104, the amount of color misregistration is calculated by the above formulas (6), (7) (or (7 ')), (8), and (9) using the update necessary value (for example, L1c_c) obtained in step S103. The amount of change is required.
そして、ステップS105で、更新部12は、上記更新式(10)〜(12)の何れか、または、他の更新式により、直近に求められた色ずれ量の変化量を用いて、保持部4で保持されている色ずれ量を更新する。そして、ステップS102に戻り、処理が繰り返される。
In step S <b> 105, the
このように、本実施形態1の画像形成装置の形成部40は、所定間隔ごとに、かつ、画像形成を妨げないように(つまり、画像形成領域外に)テストパターンを形成する。従って、色ずれ量更新の精度を上げるべく、テストパターン形成の周期(間隔)を短くしても、生産性が低下することはない。また、色ずれの補正も、安定動作するまでに、比較的、時間のかかる機械的な補正を伴わずに行うので、テストパターン形成や色ずれ量の検知や機械的な補正によるダウンタイムが発生せず、生産性も低下しない。 As described above, the forming unit 40 of the image forming apparatus according to the first embodiment forms a test pattern at predetermined intervals so as not to prevent image formation (that is, outside the image forming area). Therefore, even if the test pattern formation period (interval) is shortened in order to increase the accuracy of the color misregistration update, productivity does not decrease. In addition, since color misregistration is corrected without relatively time-consuming mechanical correction before stable operation, downtime occurs due to test pattern formation, color misregistration detection, and mechanical correction. And productivity does not decrease.
また、本実施形態1の画像形成装置であれば、ステップS102において、補正部3がテストパターンデータおよび画像データを補正する。そして、検知部11が、直近に補正部3により補正されたテストパターンデータに基づいたテストパターンを検知することで、更新必要値を求める。そして、ステップS104において、更新部12が、求められた更新必要値から、色ずれ量の変化量を求め、保持部4に保持されている色ずれ量を更新させる(つまり、色ずれ量についてフィードバック制御を行うことができる)。つまり、本実施例の画像形成装置であれば、色ずれ量の定常誤差を低減しつつ、該色ずれ量を更新することができ、結果として、画像形成装置内の温度変化などに随時適応した色ずれ量を更新することができる。よって、正確な色ずれ量の更新を行うことができる。
[実施形態2]
次に実施形態2の画像形成装置について説明する。図7に実施形態2の画像形成装置の処理フローを示す。図7は、ステップS110が、ステップS104とステップS105との間に介在されている点で、図6と異なる。以下では、ステップS110を中心に説明する。
In the case of the image forming apparatus according to the first embodiment, the
[Embodiment 2]
Next, an image forming apparatus according to the second embodiment will be described. FIG. 7 shows a processing flow of the image forming apparatus according to the second embodiment. FIG. 7 differs from FIG. 6 in that step S110 is interposed between step S104 and step S105. Hereinafter, step S110 will be mainly described.
ステップS104で、色ずれ量の変化量が求められる。そして、ステップS110では、更新部12が、ステップS110で、色ずれ量の変化量Δan, Δcn、Δdn、Δfn(n=1、...、N)が所定範囲(正常範囲)内に属しているか否かを判断する。そして更新部12が、色ずれ量の変化量が正常範囲に属していると判断すると(ステップS110のYes)、ステップS105に移行する。この正常範囲とは予め実験的に求められる。
In step S104, a change amount of the color misregistration amount is obtained. In step S110, the updating
また、更新部12が、色ずれ量の変化量が正常範囲に属していないと判断すると(ステップS110のNo)、更新部12が色ずれ量の更新処理を行うことなく、ステップS102に戻る。色ずれ量の変化量が正常範囲に属していないということは、更新部12は、検知部11によるテストパターンの検知がエラーである等を判断するからである。以下では、色ずれ量の変化量が、正常範囲内に属している場合には、色ずれ量の変化量が正常値であるといい、正常範囲内の属していない場合には、色ずれ量の変化量が異常値であるという。
If the
色ずれの変化量が正常範囲に属していないと判断することについて説明する。例えば、中間転写ベルト8に傷などがある場合に、検知部11がその傷を検知すると、検知部11はその傷についての検知結果を出力する場合がある。従って、テストパターン付近に傷があると、更新部12により算出される色ずれ量の変化量が実際とは異なる値となる。そして該色ずれ量の変化量を用いて、色ずれ量を更新すると、誤った更新がなされることになる。
A description will be given of determining that the amount of change in color misregistration does not belong to the normal range. For example, when there are scratches on the intermediate transfer belt 8 and the
従って、色ずれ量の変化量が正常範囲に属しているか否か判断する処理(ステップS110)を設けることで、色ずれ量の更新に反映させないようにすれば、誤った色ずれ量の更新がなされることないという効果を奏する。 Accordingly, by providing a process (step S110) for determining whether or not the change amount of the color misregistration amount belongs to the normal range, if it is not reflected in the update of the color misregistration amount, the erroneous color misregistration amount is updated. There is an effect that is not made.
本実施形態においては、上述したように定期的に色ずれ量の変化量を検出するようになっている。定期的に検出している短時間での色ずれ量の変化量は通常大きくないので、正常範囲の幅を小さめに(例えばプラスマイナス数十ミクロン相当)にしておけばよい。 In the present embodiment, as described above, the amount of change in the color misregistration amount is periodically detected. Since the amount of change of the color misregistration amount in a short time that is regularly detected is not usually large, the width of the normal range may be made smaller (for example, equivalent to plus or minus several tens of microns).
また、色ずれ量の変化量の1つの要素が、異常値である場合、中間転写ベルト8上の傷などの影響を受け、正常な色ずれ量の変化量の別の要素においても正常値が検知できていない場合がある。よって色ずれ量の変化量の1つの要素において異常値が検出された場合は、色ずれ量の変化量の他の要素の演算と更新を行わないようにしても良い。 In addition, when one element of the amount of change in color misregistration is an abnormal value, it is affected by scratches on the intermediate transfer belt 8, and the normal value is also obtained in another element of the amount of change in normal color misregistration. It may not be detected. Therefore, when an abnormal value is detected in one element of the amount of change in color misregistration amount, the calculation and update of other elements of the amount of change in color misregistration amount may not be performed.
また、色ずれ量の変化量の要素うち、少なくとも、2つ以上が、異常値である場合に、色ずれ量の変化量の他の要素の演算と更新を行わないようにしても良い。
[その他の実施形態(その1)]
次に、その他の実施形態(その1)について説明する。図2(g)において、色ずれ量の更新時間τに時間Tdsを加えたものが、テストパターンの印刷ジョブ開始時刻から色ずれ量の更新までの時間となる。そして、保持部4で保持されている色ずれ量を常にその時点での色ずれ量になるように制御する制御系にとってのむだ時間となる。テストパターンの印刷ジョブ間隔Tsが制御系にとってのサンプリング周期となり、本実施例では、前述のむだ時間より長くなるようにしている。制御対象となる色ずれ量の変動は温度変化が主因となるので、比較的遅く(緩やかに変化する)、例えば数分の間隔で変化していく。これに対してサンプリング周期Tsが十分短ければよいので、例えばTsを数秒と設定する。例えば、毎分60枚の印刷ができる装置では数枚に一回テストパターンを挿入することになる。なお、図3の例では3枚に1つのテストパターンが挿入されている例である。なお、このときのサンプリング時間精度は特段厳密である必要はない。
[その他の実施形態(その2)]
次に、その他の実施形態(その2)について説明する。図3において、検知部11a〜cの組付け精度、位置の経時変化などにより、検出される各々の色の位置ずれ検出値の絶対精度は依存してしまう。また、検知部11の位置の組付け精度を向上させるにはコストアップになる。また、事前にキャリブレーションなどを行っても、支持部材の熱変形などにより経時的な位置変動を生じるおそれもあり、テストパターン検出の度にキャリブレーション動作を行っていては、本発明の課題である生産性を落とさずに色ずれ補正を行うという主旨にも反する。
Further, when at least two of the elements of the amount of change in color misregistration are abnormal values, the calculation and update of other elements of the amount of change in color misregistration may not be performed.
[Other Embodiments (Part 1)]
Next, another embodiment (part 1) will be described. In FIG. 2G, the time from the print job start time of the test pattern to the update of the color misregistration amount is obtained by adding the time Tds to the color misregistration amount update time τ. This is a dead time for a control system that controls the amount of color misregistration held by the holding
[Other Embodiments (2)]
Next, another embodiment (No. 2) will be described. In FIG. 3, the absolute accuracy of the detected position shift value of each color depends on the assembly accuracy of the
そこで本実施例では、所定の基準色(例えばブラックK)に対する各色(C,M,Y)の相対的な色ずれを求め、この色ずれを補正するようにする(式(6)〜(9)参照)。人間の視覚特性として相対的なずれの方が認識しやすいので、相対的な色ずれの補正でも十分である。 Therefore, in this embodiment, a relative color shift of each color (C, M, Y) with respect to a predetermined reference color (for example, black K) is obtained, and this color shift is corrected (Equations (6) to (9)). )reference). Relative color misregistration is easier to recognize as human visual characteristics, so correction of relative color misregistration is sufficient.
もちろん、ここで説明した以外にもテストパターン及び検出部11は既存技術が存在するので、本画像形成装置の実施形態にそれらを適用することも可能であり、その形態によっては上述したことはその限りではない。
[その他の実施形態(その3)]
次に、その他の実施形態(その3)について説明する。また、図2において、1つの印刷ジョブに対し、書込制御部5(図1参照)が、それぞれの色毎に各感光体間の距離に応じた時間差をつけて出力する。書込制御部5内に備えるバッファメモリの低減のため、テストパターンデータ及び画像データを色毎に上記時間差をつけて出力するようにすると良い。すなわち、書込制御部5が、上述した副走査同期信号に基づき色毎のテストパターン出力指示信号を生成部1に出力し、色毎の画像データ転送要求信号を発行するようにしても良い。あるいは、副走査同期信号を印刷ジョブ制御部13に入力し、該印刷ジョブ制御部13で色毎のテストパターン出力指示信号及び画像データ転送要求信号を生成するようにしてもよい。
[その他の実施形態(その4)]
図8は、印刷ジョブ制御部13において、印刷ジョブ開始指示を制御する方法を示す処理フローである。
Of course, since there are existing technologies for the test pattern and
[Other Embodiments (Part 3)]
Next, another embodiment (No. 3) will be described. In FIG. 2, the writing control unit 5 (see FIG. 1) outputs a print job with a time difference corresponding to the distance between the photoconductors for each color. In order to reduce the buffer memory provided in the
[Other Embodiments (Part 4)]
FIG. 8 is a processing flow showing a method for controlling the print job start instruction in the print
ステップS201では、テストパターンデータの生成要求があるか否かを判別し、該生成要求があればステップS202へ進む。ステップS202では、印刷ジョブ制御部13が印刷ジョブ開始指示信号およびテストパターン出力指示信号を生成し、生成部1に出力する。そして、ステップS203では、テストパターンの出力時間に相当する時間(図2におけるTtp)だけ待機し、つまりその間他の印刷ジョブが発行されないようにして、ステップS201に戻る。
In step S201, it is determined whether or not there is a test pattern data generation request. If there is a generation request, the process proceeds to step S202. In step S <b> 202, the print
また、ステップS201において、テストパターンデータの生成要求がなければステップS204へ移行する。テストパターンの生成要求は、印刷ジョブ制御部13内に別途、前回のテストパターン出力指示信号から上記時間Tsが経過すると生成要求を発行するルーチンを持ち行われる。あるいは前回のテストパターン出力指示信号から所定個数の印刷ジョブ開始指示信号が発行されると生成要求を発行するルーチンを持ち行われる。ステップS204では、印刷ジョブ制御部13が、印刷要求があるか否か判別し、あればステップS205へ移行し、なければステップS201へ戻る。
ステップS205では、印刷ジョブ制御部13が、印刷ジョブ開始指示信号を生成し、画像データ転送要求を行う。ステップS206では、画像データの出力時間に相当する時間(図2におけるTprintであり、印刷する用紙サイズにより異なる)だけ待機する。つまりその間他の印刷ジョブが生成されないようにして、ステップS201に戻る。
If there is no test pattern data generation request in step S201, the process proceeds to step S204. The test pattern generation request is separately provided in the print
In step S205, the print
図8記載フローチャートに従って、テストパターン及び通常画像の印刷ジョブ開始指示を行うことにより、画像形成領域と重なることなく、テストパターンを所定間隔で形成できる。
[その他の実施形態(その5)]
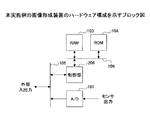
図9は、更新部12、保持部4及び印刷ジョブ制御部13の機能を果たすプログラムなどが実行されるハードウェア構成の一例である。また、前述した画像形成装置内各部の動作タイミング制御を行うエンジンコントローラと兼ねても良い。
By issuing a print job start instruction for a test pattern and a normal image according to the flowchart shown in FIG. 8, the test pattern can be formed at a predetermined interval without overlapping the image forming area.
[Other Embodiments (5)]
FIG. 9 is an example of a hardware configuration in which a program that performs the functions of the
A/D変換器101は、検知部11の出力が入力され、これをディジタルデータへ変換し、I/O(入出力)ポート105へ接続される。または、フィルタ処理などの信号処理を行う信号処理部やバッファメモリ(ともに未図示)などを介してI/Oポート105へ接続される。
The A /
I/Oポート105は、A/D変換器101及び外部ブロックと接続され、CPU102との入出力信号のやり取りを行う。印刷要求信号の入力や印刷ジョブ開始指示信号の発行、補正部3への色ずれ量の更新などはこのI/Oポート105を介して行う。
The I /
CPU102は、I/Oポート105を介して外部との入出力が行われ、色ずれ量の演算や印刷ジョブ開始制御などが実行される。またメモリバス106を介してRAM103及びROM104と接続される。
The
ROM104には、色ずれ量を演算・更新するためのプログラムを始め、各種プログラムが格納されている。
The
1・・・生成部、2・・・画像パス切替部、3・・・補正部、4・・・保持部、5・・・書込制御部、6・・・走査光学系、7・・・感光体、8・・・中間転写体、9・・・二次転写部、10・・・用紙、11・・・検知部、12・・・更新部、13・・・印刷ジョブ制御部
DESCRIPTION OF
Claims (11)
色ずれ量を保持する保持部と、現時点での前記保持部に保持されている色ずれ量に基づき、前記テストパターンデータおよび画像データを補正する補正部と、
前記補正部により補正された前記テストパターンデータに基づいたテストパターンを所定間隔ごとに前記中間転写体に形成し、かつ、前記補正部により補正された前記画像データに基づいた画像を前記中間転写体に形成する形成部と、
前記中間転写体に形成されたテストパターンを検知する検知部と、
前記検知部の検知結果から、色ずれ量の変化量を求め、該変化量に第1係数を乗じた値と、該色ずれ量の変化量の積算値に所定の第2係数を乗じた値と、前記保持部に保持されている色ずれ量と、を加算し、色ずれ量を更新する更新部と、を有することを特徴とする画像形成装置。 An intermediate transfer member, a generation unit for generating test pattern data,
A holding unit that holds the amount of color misregistration, and a correction unit that corrects the test pattern data and the image data based on the color misregistration amount currently held in the holding unit;
A test pattern based on the test pattern data corrected by the correction unit is formed on the intermediate transfer body at predetermined intervals, and an image based on the image data corrected by the correction unit is formed on the intermediate transfer body. Forming part to be formed,
A detection unit for detecting a test pattern formed on the intermediate transfer member;
A change amount of the color misregistration amount is obtained from the detection result of the detection unit, a value obtained by multiplying the change amount by a first coefficient, and a value obtained by multiplying an integrated value of the change amount of the color misregistration amount by a predetermined second coefficient. And an update unit that adds the color misregistration amount held in the holding unit and updates the color misregistration amount .
所定個数の画像間の間隔であることを特徴とする請求項1記載の画像形成装置。 The predetermined interval is
The image forming apparatus according to claim 1, wherein the interval is a predetermined number of images.
所定時間の間隔であることを特徴とする請求項1記載の画像形成装置。 The predetermined interval is
The image forming apparatus according to claim 1, wherein the interval is a predetermined time interval.
所定個数の画像間の間隔であり、かつ、所定時間の間隔であることを特徴とする請求項1記載の画像形成装置。 The predetermined interval is
The image forming apparatus according to claim 1, wherein the interval is a predetermined number of images and a predetermined time interval.
該更新部により求められた色ずれ量の変化量のうち、少なくとも1つの成分が、予め定められた所定範囲内に属していない場合には、色ずれ量の更新を行わないことを特徴とする請求項1〜4何れか1項に記載の画像形成装置。 The update unit
The color misregistration amount is not updated when at least one component of the change amount of the color misregistration amount obtained by the updating unit does not belong to a predetermined range. The image forming apparatus according to claim 1.
スキューずれ、主走査方向倍率ずれ、主走査方向レジストずれ、副走査方向レジストずれ、のうち、少なくとも1つを含むことを特徴とする請求項1〜5何れか1項に記載の画像形成装置。 The color misregistration amount is
The image forming apparatus according to claim 1, comprising at least one of skew deviation, main scanning direction magnification deviation, main scanning direction registration deviation, and sub-scanning direction registration deviation.
色ずれ量の各成分を要素とする行列の逆行列を用いて、前記テストパターンデータおよび前記画像データを補正することを特徴とする請求項1〜6何れか1項に記載の画像形成装置。 The correction unit is
The image forming apparatus according to claim 1, wherein the test pattern data and the image data are corrected using an inverse matrix of a matrix having each component of the color misregistration amount as an element.
色ずれ量の各成分の演算ごとに異なることを特徴とする請求項1〜7何れか1項に記載の画像形成装置。 The first coefficient and the second coefficient are:
The image forming apparatus according to claim 1, wherein the image forming apparatus is different for each calculation of each component of the color misregistration amount.
前記テストパターンを前記中間転写体上の、主走査方向両端に形成することを特徴とする請求項1〜8何れか1項に記載の画像形成装置。 The forming part is
It said test pattern on the intermediate transfer member, the image forming apparatus according to any one of claims 1-8, characterized in that formed in the main scanning direction both ends.
前記テストパターンを前記中間転写体に形成された画像間に形成することを特徴とする請求項1〜8何れか1項に記載の画像形成装置。 The forming part is
The image forming apparatus according to any one of claims 1-8, characterized in that to form the test pattern between images formed in said intermediate transfer member.
前記補正工程により補正された前記テストパターンデータに基づいたテストパターンを所定間隔ごとに中間転写体に形成し、かつ、前記画像データに基づいた画像を前記中間転写体に形成する形成工程と、
前記中間転写体に形成されたテストパターンを検知する検知工程と、
前記検知工程の検知結果から、色ずれ量の変化量を求め、該変化量に第1係数を乗じた値と、該色ずれ量の変化量の積算値に所定の第2係数を乗じた値と、前記保持部に保持されている色ずれ量と、を加算し、色ずれ量を更新する更新工程と、を有することを特徴とする画像形成方法。 A correction step of correcting the test pattern data and the image data generated by the generation unit based on the amount of color misregistration held in the current holding unit;
Forming a test pattern based on the test pattern data corrected in the correction step on the intermediate transfer body at predetermined intervals, and forming an image based on the image data on the intermediate transfer body;
A detection step of detecting a test pattern formed on the intermediate transfer member;
A change amount of the color misregistration amount is obtained from the detection result of the detection step, a value obtained by multiplying the change amount by a first coefficient, and a value obtained by multiplying an integrated value of the change amount of the color misregistration amount by a predetermined second coefficient. And an update step of adding the color misregistration amount held in the holding unit to update the color misregistration amount .
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010206520A JP5771925B2 (en) | 2010-09-15 | 2010-09-15 | Image forming apparatus |
| CN201180049673.0A CN103168276B (en) | 2010-09-15 | 2011-09-02 | Imaging device and formation method |
| PCT/JP2011/070543 WO2012036073A1 (en) | 2010-09-15 | 2011-09-02 | Image forming apparatus and image forming method |
| CA2810490A CA2810490C (en) | 2010-09-15 | 2011-09-02 | Image forming apparatus and image forming method |
| KR1020137006290A KR101536831B1 (en) | 2010-09-15 | 2011-09-02 | Image forming apparatus and image forming method |
| EP11825076.0A EP2616887B1 (en) | 2010-09-15 | 2011-09-02 | Image forming apparatus and image forming method |
| US13/818,726 US8867973B2 (en) | 2010-09-15 | 2011-09-02 | Image forming apparatus and image forming method that corrects test pattern data and image data based on color displacement amount |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010206520A JP5771925B2 (en) | 2010-09-15 | 2010-09-15 | Image forming apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012063499A JP2012063499A (en) | 2012-03-29 |
| JP5771925B2 true JP5771925B2 (en) | 2015-09-02 |
Family
ID=46059287
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010206520A Expired - Fee Related JP5771925B2 (en) | 2010-09-15 | 2010-09-15 | Image forming apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5771925B2 (en) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012181456A (en) * | 2011-03-02 | 2012-09-20 | Ricoh Co Ltd | Image forming apparatus, color shift correction method, and color shift error correction program |
| JP2013076983A (en) | 2011-09-14 | 2013-04-25 | Ricoh Co Ltd | Image forming apparatus, and image forming method |
| WO2013141048A1 (en) | 2012-03-21 | 2013-09-26 | 日立化成株式会社 | Inorganic phosphor-containing polymer particles, method for producing inorganic phosphor-containing polymer particles, and solar cell module |
| JP6191126B2 (en) | 2012-11-30 | 2017-09-06 | 株式会社リコー | Optical writing control apparatus, image forming apparatus, and optical writing apparatus control method |
| JP6064560B2 (en) * | 2012-12-04 | 2017-01-25 | 株式会社リコー | Image forming apparatus |
| JP6115114B2 (en) * | 2012-12-14 | 2017-04-19 | 株式会社リコー | Image forming apparatus and color misregistration correction method |
| US9020406B2 (en) | 2012-12-14 | 2015-04-28 | Ricoh Company, Ltd. | Image forming apparatus and method of correcting color registration error |
| KR102004384B1 (en) * | 2013-04-03 | 2019-10-02 | 휴렛-팩커드 디벨롭먼트 컴퍼니, 엘.피. | Imaging forming apparatus and control method for the same |
| JP5847114B2 (en) * | 2013-04-26 | 2016-01-20 | 株式会社沖データ | Image forming apparatus |
| JP6306925B2 (en) * | 2014-04-08 | 2018-04-04 | キヤノン株式会社 | Image forming apparatus |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3891135B2 (en) * | 2003-03-27 | 2007-03-14 | コニカミノルタビジネステクノロジーズ株式会社 | Image forming apparatus |
| JP4359538B2 (en) * | 2004-03-09 | 2009-11-04 | 株式会社リコー | Color image forming apparatus, color image forming method, color image forming program, and recording medium |
| JP2006091179A (en) * | 2004-09-21 | 2006-04-06 | Fuji Xerox Co Ltd | Image forming apparatus |
| JP2008129486A (en) * | 2006-11-24 | 2008-06-05 | Ricoh Co Ltd | Exposure apparatus, image forming apparatus, and adjustment apparatus |
| JP5010977B2 (en) * | 2007-05-18 | 2012-08-29 | 株式会社リコー | Image forming apparatus and image forming apparatus control method |
-
2010
- 2010-09-15 JP JP2010206520A patent/JP5771925B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012063499A (en) | 2012-03-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5771925B2 (en) | Image forming apparatus | |
| KR101536831B1 (en) | Image forming apparatus and image forming method | |
| US9020406B2 (en) | Image forming apparatus and method of correcting color registration error | |
| JP6011279B2 (en) | Image forming apparatus and image forming method | |
| JP2006215524A (en) | Image forming apparatus, image forming method, and program for causing computer to execute the method | |
| JP2014006393A (en) | Image forming apparatus | |
| JP5633806B2 (en) | Image forming apparatus | |
| JP2012128059A (en) | Image forming device | |
| JP6887762B2 (en) | Image forming device | |
| US8837995B2 (en) | Image apparatus with color registration adjustment, control method therefor, and storage medium storing control program therefor | |
| JP2010107539A (en) | Color image forming apparatus | |
| JP6115114B2 (en) | Image forming apparatus and color misregistration correction method | |
| JP2009036876A (en) | Color image forming apparatus and control method thereof | |
| JP2014219608A (en) | Image forming apparatus, and image forming method | |
| JP6064560B2 (en) | Image forming apparatus | |
| KR20140105253A (en) | Image forming apparatus and method for image forming | |
| JP4822264B2 (en) | Image forming apparatus | |
| JP6089711B2 (en) | Image forming apparatus and color misregistration correction method | |
| JP2018010154A (en) | Image forming apparatus | |
| JP2012181456A (en) | Image forming apparatus, color shift correction method, and color shift error correction program | |
| JP4597062B2 (en) | Beam scanning apparatus, image forming apparatus, timing correction method, and timing correction program | |
| JP2010139841A (en) | Color image forming apparatus and image controller | |
| JP2014119573A (en) | Image forming apparatus, and color shift correction method | |
| JP5822625B2 (en) | Color image forming apparatus | |
| JP2017203937A (en) | Image forming apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140606 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150310 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150511 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150615 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5771925 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |