JP5652118B2 - Vehicle travel control device and vehicle travel control method - Google Patents
Vehicle travel control device and vehicle travel control method Download PDFInfo
- Publication number
- JP5652118B2 JP5652118B2 JP2010237089A JP2010237089A JP5652118B2 JP 5652118 B2 JP5652118 B2 JP 5652118B2 JP 2010237089 A JP2010237089 A JP 2010237089A JP 2010237089 A JP2010237089 A JP 2010237089A JP 5652118 B2 JP5652118 B2 JP 5652118B2
- Authority
- JP
- Japan
- Prior art keywords
- torque
- power generation
- engine
- target
- generation torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Hybrid Electric Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
本発明は、エンジン及びモータを駆動源とし、走行の状態に応じてエンジン及びモータの少なくとも一方を使用して走行するハイブリッド車両の走行制御の技術に関する。 The present invention relates to a travel control technique for a hybrid vehicle that travels using an engine and a motor as drive sources and using at least one of the engine and motor according to the travel state.
ハイブリッド車両の走行制御を行う装置としては、例えば特許文献1に記載の技術がある。この特許文献1のハイブリッド車両の制御装置では、発電トルクをシフトレンジ、及び、走行路の勾配により切り替えている。
As an apparatus for performing traveling control of a hybrid vehicle, for example, there is a technique described in
しかしながら、上記特許文献1の制御装置では、発電量の絶対値を走行路の勾配により規定することになっている。そのため、推定エンジントルクが実エンジントルク(実際の出力エンジントルク)と乖離する過渡状態において、頻繁に発電量(発電トルク)が増減し、この増減による駆動トルクの変動によって車速が変動するという問題があった。
本発明は、上記のような点に着目したもので、ハイブリッド車両の自動走行制御時において、発電量の急激な変動によって発生する速度変動を抑えることを目的としている。
However, in the control device disclosed in
The present invention pays attention to the above points, and an object of the present invention is to suppress speed fluctuations caused by sudden fluctuations in the amount of power generated during automatic travel control of a hybrid vehicle.
上記課題を解決するために、本発明は、設定した目標発電電力の発電を行うためのエンジン回転トルクである要求発電トルクを算出する要求発電トルク算出手段と、要求発電トルクの変化率の上限値を制限する制限手段とを備えたハイブリッド車両の走行を制御する車両用走行制御装置である。本発明の車両用走行制御装置は、制限手段が、自動走行制御が実施されているときに、要求発電トルクの変化率の上限値を、通常走行制御が実施されているときの上限値よりも小さい値に制限する。 In order to solve the above-described problems, the present invention provides a required power generation torque calculating means for calculating a required power generation torque that is an engine rotation torque for generating the set target generated power, and an upper limit value of a change rate of the required power generation torque. A vehicle travel control device that controls travel of a hybrid vehicle provided with a limiting means for limiting In the vehicle travel control device of the present invention, the limiting means sets the upper limit value of the rate of change in the required power generation torque when the automatic travel control is being performed to be higher than the upper limit value when the normal travel control is being performed. Limit to small values.
本発明によれば、走行状態を目標走行状態で維持するように自動調整する自動走行制御時において、要求発電トルクの急激な変動によって発生する速度変動を抑制することが可能となる。 According to the present invention, it is possible to suppress speed fluctuations caused by sudden fluctuations in the required power generation torque during automatic running control in which the running state is automatically adjusted to maintain the running state in the target running state.
次に、本発明の実施形態について図面に基づき説明する。
図1は実施形態に係るハイブリッド車両の概要構成図である。図1に示すハイブリッド車両は後輪駆動の例であるが、前輪駆動であっても本発明は適用可能である。
(駆動系の構成)
まず駆動系(パワートレーン)の構成について説明する。
本実施形態のパワートレーンは、図1に示すように、エンジン1と、モータジェネレータ2と、自動変速機(オートマチックトランスミッション(AT))3と、第1クラッチ4と、第2クラッチ5と、ディファレンシャルギア6と、左後輪(駆動輪)7Lと、右後輪(駆動輪)7Rと、を備える。
パワートレーンは、更に、エンジン回転センサ10と、MG回転センサ11と、AT入力回転センサ12と、AT出力回転センサ13と、電動サブオイルポンプ14と、機械式オイルポンプ15と、を備える。
Next, embodiments of the present invention will be described with reference to the drawings.
FIG. 1 is a schematic configuration diagram of a hybrid vehicle according to an embodiment. The hybrid vehicle shown in FIG. 1 is an example of rear wheel drive, but the present invention can also be applied to front wheel drive.
(Configuration of drive system)
First, the configuration of the drive system (power train) will be described.
As shown in FIG. 1, the power train of the present embodiment includes an
The power train further includes an
かかるパワートレーンは、エンジン1から左右駆動輪7L,7Rまでのトルク伝達経路の途中に、モータジェネレータ2及び自動変速機3を介装した構成となっている。更に、エンジン1とモータジェネレータ2との間に、第1クラッチ4を介装した構成となっている。また、モータジェネレータ2と左右駆動輪7L,7Rとの間のトルク伝達経路に第2クラッチ5を介装した構成となっている。この例では、第2クラッチ5は、自動変速機3の一部を構成する。自動変速機3は、プロペラシャフト、ディファレンシャルギア6、及びドライブシャフトを介して左右駆動輪7L,7Rに接続されている。
エンジン1は、ガソリンエンジンやディーゼルエンジンである。エンジン1は、後述するエンジンコントローラ22からの制御指令に基づき、スロットルバルブのバルブ開度等が制御可能となっている。なお、エンジン1の出力軸に、フライホイールが設けられていても良い。
Such a power train has a configuration in which the
The
モータジェネレータ2は、例えばロータに永久磁石を埋設しステータにステータコイルを巻き付けた同期型モータである。モータジェネレータ2は、後述するモータコントローラ23からの制御指令に基づき、後述のインバータ8で作り出した三相交流を印加することで制御できる。このモータジェネレータ2は、後述のバッテリ9からの電力の供給を受けて回転駆動する電動機として動作することもできる(この状態を「力行」と呼ぶ)。また、モータジェネレータ2は、ロータが外力により回転している場合には、ステータコイルの両端に起電力を生じさせる発電機として機能してバッテリ9を充電することもできる(この動作状態を「回生」と呼ぶ)。このモータジェネレータ2のロータは、図外のダンパーを介して自動変速機3の入力軸に連結している。
The
自動変速機3は、例えば、前進5速後退1速や前進7速後退1速等の有段階の変速比を車速や後述する統合コントローラ21から入力した変速用アクセル開度等に応じて自動的に切り換える変速機である。ここで、第2クラッチ5は、専用クラッチとして新たに追加したものではなく、自動変速機3の各変速段にて締結される複数の摩擦締結要素のうち、いくつかの摩擦締結要素を流用して構成する。
For example, the
第1クラッチ4は、上記エンジン1とモータジェネレータ2との間に介装された油圧式単板クラッチである。第1クラッチ4は、後述する統合コントローラ21からの制御指令に基づいて、入力した目標クラッチ伝達トルクとなるように、後述する第1クラッチ油圧ユニット(不図示)の作り出した制御油圧により、締結状態若しくは開放状態となる。なお、締結・開放には、滑り締結と滑り開放を含む。
The
第2クラッチ5は、油圧式多板クラッチである。第2クラッチ5は、後述する統合コントローラ21からの制御指令に基づき、目標クラッチ伝達トルクとなるように、後述する第2クラッチ油圧ユニットの作り出した制御油圧により、締結状態若しくは開放状態となる。なお、締結・開放には、滑り締結と滑り開放を含む。
ここで、本実施形態では、第2クラッチ5を自動変速機3の一部として構成する場合を例示しているが、これに限定されない。第2クラッチ5は、モータジェネレータ2と自動変速機3との間、若しくは自動変速機3とディファレンシャルギア6との間に配置する構成であっても良い。
The
Here, although the case where the
また、各輪には、それぞれブレーキユニット(不図示)を備える。各ブレーキユニットは、例えばディスクブレーキやドラムブレーキからなる。各ブレーキユニットは、油圧ブレーキ装置であっても、電動ブレーキ装置であっても良い。各ブレーキユニットは、ブレーキコントローラ25からの指令に応じて、対応する車輪に制動力を付与する。なお、ブレーキユニットは、全ての車輪に設ける必要はない。
Each wheel is provided with a brake unit (not shown). Each brake unit includes, for example, a disc brake and a drum brake. Each brake unit may be a hydraulic brake device or an electric brake device. Each brake unit applies a braking force to the corresponding wheel in response to a command from the
エンジン回転センサ10は、エンジン1の回転数を検出するセンサである。
MG回転センサ11は、レゾルバ等から構成されモータジェネレータ2のモータ回転数を検出するセンサである。
AT入力回転センサ12は、自動変速機3の入力軸の回転数を検出するセンサである。
AT出力回転センサ13は、自動変速機3の出力軸の回転数を検出するセンサである。
The
The
The AT
The AT
電動サブオイルポンプ14は、第1クラッチ4のための油圧を発生するポンプである。
機械式オイルポンプ15は、第2クラッチ5のための油圧を発生するポンプである。
第1クラッチ油圧ユニットは、例えば、印加電流に応じてバルブ(プランジャ)のストローク位置を変化させ、バルブ部の開口面積等を変えてオイルの流量を制御する比例制御型のアクチュエータである。第1クラッチ油圧ユニットは、後述するATコントローラ24からの指令信号(制御電流)に応じてストローク制御され、第1クラッチ4に供給する油圧を制御する。
The electric
The
The first clutch hydraulic unit is, for example, a proportional control type actuator that changes the stroke position of a valve (plunger) in accordance with an applied current and controls the flow rate of oil by changing the opening area of the valve portion. The first clutch hydraulic unit is stroke-controlled according to a command signal (control current) from an
第2クラッチ油圧ユニットは、例えば、AT油圧コントロールバルブ内に配設され、第1クラッチ油圧ユニットと同様に比例制御型のアクチュエータである。第2クラッチ油圧ユニットは、後述するATコントローラ24からの指令信号(制御電流)に応じてストローク制御され、第2クラッチ5に供給する油圧を制御する。
また、パワートレーンは、第1クラッチ4に供給される油圧を検出する第1クラッチ油圧センサを有する。第1クラッチ油圧センサは、検出した油圧情報を、ATコントローラ24に出力する。
また、パワートレーンは、第2クラッチ5に供給される油圧を検出する第2クラッチ油圧センサを有する。第2クラッチ油圧センサは、検出した油圧情報を、ATコントローラ24に出力する。
The second clutch hydraulic unit is, for example, an AT hydraulic control valve, and is a proportional control type actuator similar to the first clutch hydraulic unit. The second clutch hydraulic unit is stroke-controlled according to a command signal (control current) from an
Further, the power train has a first clutch hydraulic pressure sensor that detects the hydraulic pressure supplied to the
Further, the power train has a second clutch hydraulic pressure sensor that detects the hydraulic pressure supplied to the
(制御系の構成)
次に、ハイブリッド車両の制御系の構成について説明する。
図2は、ハイブリッド車両の制御系を説明する構成図である。
ハイブリッド車両の制御系は、図2に示すように、インバータ8と、バッテリ9と、電圧センサ18と、電流センサ19と、APOセンサ(アクセルセンサ)20と、車輪速センサ27L,27Rと、ブレーキスイッチ(SW)29と、アクセルペダル33と、ペダルアクチュエータ34と、メータ35と、を備える。
(Control system configuration)
Next, the configuration of the control system of the hybrid vehicle will be described.
FIG. 2 is a configuration diagram illustrating a control system of the hybrid vehicle.
As shown in FIG. 2, the control system of the hybrid vehicle includes an
インバータ8は、高電圧インバータであって、バッテリ9からの直流電流を交流電流に変換し、モータジェネレータ2の駆動電流を生成する。更に、インバータ8は、モータジェネレータ2からの交流電流を直流電流に変換し、バッテリ9の充電電流を生成する。
バッテリ9は、モータジェネレータ2にインバータ8を介して電力を供給し、また、モータジェネレータ2からの回生エネルギーを、インバータ8を介して蓄積する高電圧バッテリである。
The
電圧センサ18は、バッテリ9の電圧を検出するセンサである。電圧センサ18は、検出した電圧情報をバッテリコントローラ26に出力する。
電流センサ19は、バッテリ9の電流を検出するセンサである。電流センサ19は、検出した電流情報をバッテリコントローラ26に出力する。
アクセルセンサ20は、アクセルペダル33のアクセル開度APOを検出するセンサである。アクセルセンサ20は、検出したアクセル開度APO情報を統合コントローラ21に出力する。
The
The
The
車輪速センサ27Lは、車輪の回転速度に応じた周波数あるいは回転周期を示すパルス信号を発生するセンサであって、左駆動輪7Lの回転速度を検出する。車輪速センサ27Lは、検出した左駆動輪7Lの車輪速情報をブレーキコントローラ25に出力する。
車輪速センサ27Rは、車輪の回転速度に応じた周波数あるいは回転周期を示すパルス信号を発生するセンサであって、右駆動輪7Rの回転速度を検出する。車輪速センサ27Rは、検出した右駆動輪7Rの車輪速情報をブレーキコントローラ25に出力する。
The
The
また、車輪速情報から求まる車速情報は、ブレーキコントローラ25から統合コントローラ21及び車間制御コントローラ31に出力される。
なお、車輪速センサ27L,27Rは、図1に示すように、左右駆動輪(後輪)7L,7Rの車輪速を検出するようにそれぞれ設けたが、不図示の左右従動輪(前輪)にも設けてもよい。
ブレーキスイッチ29は、ブレーキペダル(不図示)の操作を検出するスイッチである。
Further, the vehicle speed information obtained from the wheel speed information is output from the
The
The
アクセルペダル33は、運転者によって踏み込み操作され、アクセル開度APOを、踏み込み量に応じて予め設定されている大きさに可変する。
ペダルアクチュエータ34は、車間制御コントローラ31からの指令に応じたペダル反力をアクセルペダル33に付与するアクチュエータである。
メータ35は、運転者に走行状態を提示するためのメータである。メータ35は、オートクルーズの情報などを表示する。
The
The
The
図2に示すように、ハイブリッド車両の制御系は、更に、統合コントローラ21と、エンジンコントローラ22と、モータコントローラ23と、ATコントローラ24と、ブレーキコントローラ25と、バッテリコントローラ26と、を備える。
統合コントローラ21と、エンジンコントローラ22と、モータコントローラ23と、ATコントローラ24と、ブレーキコントローラ25とは、互いに情報交換が可能なCAN通信線(不図示)を介して接続する。
統合コントローラ21は、車両全体の消費エネルギーを管理し、最高効率で車両を走らせるための機能を担うものである。
As shown in FIG. 2, the hybrid vehicle control system further includes an
The
The
統合コントローラ21は、エンジン回転数Neを検出するエンジン回転センサ10、モータ回転数Nmを検出するMG回転センサ11、変速機入力回転数を検出するAT入力回転センサ12、変速機出力回転数を検出するAT出力回転センサ13からの情報を入力する。また、統合コントローラ21は、アクセルセンサ20からアクセル開度APO情報、バッテリコントローラ26からバッテリ9の蓄電状態SOCの情報を入力する。また、統合コントローラ21は、CAN通信線を介して取得した情報を出力する。
The
また、統合コントローラ21は、エンジンコントローラ22への制御指令によりエンジン1の動作制御を実行する。統合コントローラ21は、モータコントローラ23への制御指令によりモータジェネレータ2の動作制御を実行する。統合コントローラ21は、ATコントローラ24への制御指令により第1クラッチ4の締結・開放制御を実行する。統合コントローラ21は、ATコントローラ24への制御指令により第2クラッチ5の締結・開放制御を実行する。
Further, the
エンジンコントローラ22は、エンジン回転センサ10からのエンジン回転数情報を入力する。そして、エンジンコントローラ22は、統合コントローラ21からの目標エンジントルク等に応じ、エンジン動作点(Ne、Te)を制御する指令を、例えば、図外のスロットルバルブアクチュエータへ出力する。なお、エンジン回転数Neの情報は、CAN通信線を介して統合コントローラ21から取得する。
モータコントローラ23は、モータジェネレータ2のロータ回転位置を検出するMG回転センサ11からの情報を入力する。そして、モータコントローラ23は、統合コントローラ21からの目標モータトルクや回転数指令等に応じ、モータジェネレータ2のモータ動作点(Nm、Tm)を制御する指令をインバータ8へ出力する。
The
The
ATコントローラ24は、第1クラッチ4に供給される油圧を検出する第1油圧センサ(不図示)及び第2クラッチ5に供給される油圧を検出する第2クラッチ油圧センサ(不図示)からのセンサ情報を入力する。そして、ATコントローラ24は、統合コントローラ21からのアクセル開度APO情報、車速情報、第1及び第2クラッチ制御指令(目標第1クラッチトルク、目標第2クラッチトルク)に応じ、変速制御における第2クラッチ5の制御に優先し、第2クラッチ5の締結・開放を制御する制御指令をAT油圧コントロールバルブ内の第2クラッチ油圧ユニットに出力すると共に、第1クラッチ4の締結・開放を制御する制御指令を第1クラッチ油圧ユニット(不図示)に出力する。
The
ブレーキコントローラ25は、後輪の各車輪速を検出する車輪速センサ27L,27Rとブレーキストロークセンサからのセンサ情報を入力する。上記ブレーキコントローラ25は、予め設定した制御サイクルで、ブレーキペダルのストローク量や車間制御コントローラ31などからの制動要求量、車速に基づき目標減速度を演算する。そして、ブレーキコントローラ25は、回生協調ブレーキ制御として、目標減速度を回転制動力としての協調回生ブレーキ要求トルク及び機械制動力(油圧制動力)としての目標油圧制動力に制動力配分を行う。そして、協調回生ブレーキ要求トルクを統合コントローラ21のモータジェネレータ2制御部に出力する。目標油圧制動力を、油圧制動力装置に出力する。例えば、上記ブレーキコントローラ25は、ブレーキ踏み込み制動時のブレーキストロークBS等から求められる要求制動力に対し、回生制動力だけでは不足する場合、回生協調ブレーキ制御を行う。そして、その不足分を機械制動力(液圧制動力やモータジェネレータ2制動力)で補うように、統合コントローラ21からの回生協調制御指令に基づいて回生協調ブレーキ制御を行う。
The
バッテリコントローラ26は、バッテリ9の充電状態をあらわすバッテリSOCを監視している。バッテリコントローラ26は、バッテリSOC情報を、モータジェネレータ2の制御情報等として、CAN通信線を介して統合コントローラ21へ供給する。
ハイブリッド車両の制御系は、更に、ステアリングスイッチ(SW)28と、クルーズキャンセルスイッチ(SW)30と、車間制御コントローラ31と、レーダユニット32と、を備える。
The
The hybrid vehicle control system further includes a steering switch (SW) 28, a cruise cancel switch (SW) 30, an
なお、車間制御コントローラ31と、統合コントローラ21と、エンジンコントローラ22と、モータコントローラ23と、ATコントローラ24と、ブレーキコントローラ25とは、上記CAN通信線を介して接続する。
ステアリングスイッチ28は、自動走行制御であるオートクルーズ走行の起動や走行条件(目標車速)の変更指示を運転者が行う操作子である。ここで、本実施形態のオートクルーズ走行は、定速走行制御(定速クルーズ)及び車間制御(車間クルーズ)の両方を含む。
Note that the
The
クルーズキャンセルスイッチ30は、ブレーキペダルに設けられたスイッチである。クルーズキャンセルスイッチ30は、自動走行制御であるオートクルーズ走行の終了を指示するための操作子である。なお、上記ステアリングスイッチ28にもオートクルーズの終了を指示するスイッチが存在する。本実施形態では、このスイッチも含めクルーズキャンセルスイッチ30と呼ぶ。
レーダユニット32は、車両前方の先行車両を検出し、検出した先行車両情報を車間制御コントローラ31に出力する。
The cruise cancel
The
車間制御コントローラ31は、運転者が設定したステアリングスイッチ28の情報、クルーズ制御作動許可状態、その他の必要情報を、統合コントローラ21から入力する。そして、車間制御コントローラ31は、統合コントローラ21からの情報に基づき、先行車に対する車間制御を実施するか否かの判定を行う。そして、車間制御コントローラ31は、車間制御を実施すると判定すると、自車速、レーダユニット32の検出に基づく先行車両の情報(車間距離や相対速度など)等に基づき、先行車に対して目標車間距離や目標車間時間とするための目標加速度及び目標減速度を演算する。更に、車間制御コントローラ31は、求めた目標加速度を車間クルーズ要求トルク(ACC要求トルク)として統合コントローラ21に出力する。また、車間制御コントローラ31は、求めた目標減速度を制動要求トルクとしてブレーキコントローラ25に出力する。
The
また、車間制御コントローラ31は、DCA(Distance Control Assist)制御部31Aを有する。DCA制御部31Aは、統合コントローラ21から受信するアクセル開度APO情報と、車輪速センサ27の検出に基づく車速情報、レーダユニット32からの情報に基づきペダル反力指令を演算する。そして、DCA制御部31Aは、先行車との車間を保つ為の運転者への支援情報として、演算した反力指令をペダルアクチュエータ34に出力する。これにより、ペダルアクチュエータ34は、反力指令に応じて入力したアクセルペダル33に反力を付与する。
The
(基本動作モード)
次に、本実施形態のハイブリッド車両における基本動作モードについて説明する。
車両停止中において、バッテリSOCの低下時であれば、エンジン1を始動して発電を行い、バッテリ9を充電する。そして、バッテリSOCが通常範囲になれば、第1クラッチ4は締結で第2クラッチ5は開放のままでエンジン1を停止する。
エンジン1による発進時には、アクセル開度APOとバッテリSOC状態によって、モータジェネレータ2を連れ回し、力行/発電に切り替える。
(Basic operation mode)
Next, the basic operation mode in the hybrid vehicle of this embodiment will be described.
If the battery SOC is low while the vehicle is stopped, the
At the time of starting by the
モータ走行(EVモード)は、エンジン始動に必要なモータトルクとバッテリ出力を確保し、不足する場合はエンジン走行に移行する。また、予め設定したマップ等に基づき予め設定した所定車速以上となると、モータ走行(EVモード)からエンジン走行(HEVモード)に移行する。またエンジン走行時において、アクセル踏み込み時のレスポンス向上のために、エンジントルク遅れ分をモータジェネレータ2によりアシストする。すなわち、エンジン走行中は、エンジン1の動力だけ、若しくはエンジン1及びモータジェネレータ2の動力の両方で走行するモードが存在する。
ブレーキON減速時には、運転者のブレーキ操作に応じた減速力を回生協調ブレーキ制御にて得る。
エンジン走行やモータ走行中における変速時には、加減速中の変速に伴う回転数合わせのために、モータジェネレータ2を回生/力行させ、トルクコンバータ無しでのスムーズな変速を行う。
Motor running (EV mode) secures the motor torque and battery output necessary for starting the engine, and shifts to engine running if insufficient. Further, when the vehicle speed exceeds a predetermined vehicle speed set in advance based on a preset map or the like, the motor drive (EV mode) is shifted to the engine drive (HEV mode). When the engine is running, the
At the time of brake-on deceleration, a deceleration force corresponding to the driver's brake operation is obtained by regenerative cooperative brake control.
At the time of shifting during engine traveling or motor traveling, the
図3は、本実施形態の統合コントローラ21の制御における基本的な指令値の基本的な流れを示す概要構成図を例示するものである。また、図4は本実施形態の統合コントローラ21の制御を機能的に説明する機能ブロック図である。
次に、統合コントローラ21にて実行する制駆動制御処理における、本発明に関わる部分について説明する。
統合コントローラ21は、図4に示すように、要求発電トルクベース演算部21Aと、要求エンジン発電トルク演算部21Bと、モータ出力可能トルク演算部21Cと、目標駆動トルク演算部21Dと、車両状態モード決定部21Eと、エンジン始動制御部21Fと、エンジン停止制御部21Gと、目標エンジントルク算出部21Hと、目標モータトルク算出部21Jと、目標クラッチトルク算出部21Kと、を備える。
FIG. 3 illustrates a schematic configuration diagram illustrating a basic flow of basic command values in the control of the
Next, a part related to the present invention in the braking / driving control process executed by the
As shown in FIG. 4, the
要求発電トルクベース演算部21Aは、バッテリコントローラ26からのSOCなどのバッテリ情報などに基づき、モータジェネレータ2で発電すべき目標発電電力を演算する。更に、演算した目標発電電力に基づき、エンジン1で発生すべき要求エンジン発電トルクのベースとなる要求発電トルクベースを演算する。更に、MG回転センサ11、又はAT入力回転センサ12からの入力軸回転数に基づき、演算した要求発電トルクベースを、エンジン最適動作点を用いるように補正する。
The required power generation torque
要求エンジン発電トルク演算部21Bは、走行状態等に基づき、要求発電トルクベースに対して、レートリミットを設定する。そして、設定したレートリミットに基づき要求発電トルクベースを補正して、要求エンジン発電トルクを演算する。
モータ出力可能トルク演算部21Cは、バッテリコントローラ26からのSOCなどのバッテリ情報や、車速などに基づき、モータジェネレータ2が出力可能なモータ出力可能トルクを演算する。
The required engine power generation
The motor output possible
本実施形態の目標駆動トルク演算部21Dは、図5に示すように、ドライバ要求トルク演算部21Daと、自動制御要求トルク演算部21Dbと、第1目標駆動トルク演算部21Dcと、車速リミッタトルク演算部21Ddと、最終目標駆動トルク演算部21Deと、を備える。
ドライバ要求トルク演算部21Daは、少なくともアクセルペダル33のアクセル開度APO情報及び車速に基づき、ドライバ要求トルクを演算する。ドライバ要求トルク演算部21Daは、図3に示す例では、アクセル開度APO及び変速機入力回転数を入力し、ベーストルクマップを参照して基本ドライバ要求トルクを演算する。また、車速に基づき、クリープ・コースト駆動力テーブルを参照して第1の補正トルクを演算する。また、アクセル開度APO情報と、変速機入力回転数と、SOC等に基づく電力制限情報とに基づき、MGアシストトルクMAPを参照して、第2の補正トルクを算出する。そして、ドライバ要求トルク演算部21Daは、演算した基本ドライバ要求トルク、第1の補正トルク及び第2の補正トルクに基づき、最終的なドライバ要求トルクを求める。
As shown in FIG. 5, the target
The driver request torque calculation unit 21Da calculates the driver request torque based on at least the accelerator opening APO information of the
自動制御要求トルク演算部21Dbは、ステアリングスイッチ28の操作情報及びACC許可信号を車間制御コントローラ31に出力すると共に、該車間制御コントローラ31からの車間クルーズ要求トルク(ACC要求トルク)を入力する。また、自動制御要求トルク演算部21Dbは、ASC(自動速度制御(定速走行制御ともいう))作動時には、ステアリングスイッチ28によって設定された設定車速及び現在の車速に基づき、設定車速となるようにフィードバック制御するためのクルーズ要求トルクを演算する。そして、自動制御要求トルク演算部21Dbは、ASC作動時において、ACC作動(車間制御の作動)の有無に応じて、ACC要求トルク若しくはASC要求トルクの一方を自動制御要求トルクとして選択する。ここでは、ACC作動時には、クルーズ要求トルクよりもACC要求トルクを優先して選択するように処理する。
The automatic control request torque calculation unit 21Db outputs the operation information of the
第1目標駆動トルク演算部21Dcは、ドライバ要求トルク演算部21Daが演算したドライバ要求トルクと、自動制御要求トルク演算部21Dbが演算した自動制御要求トルクのセレクトハイを実施して、大きい方を第1目標駆動トルクとして選択して出力する。
車速リミッタトルク演算部21Ddは、ステアリングスイッチ28によって設定される設定車速及び現在の車速に基づき、上限の車速以下とするための車速リミッタトルクを演算する。
最終目標駆動トルク演算部21Deは、第1目標駆動トルク演算部21Dcが出力する第1目標駆動トルクと、車速リミッタトルク演算部21Ddが演算した車速リミッタトルクとのセレクトローを実施する。すなわち、第1目標駆動トルクを車速リミッタトルクで制限して、目標駆動トルクを求める。
The first target drive torque calculation unit 21Dc performs a select high of the driver request torque calculated by the driver request torque calculation unit 21Da and the automatic control request torque calculated by the automatic control request torque calculation unit 21Db. One target drive torque is selected and output.
The vehicle speed limiter torque calculation unit 21Dd calculates a vehicle speed limiter torque for setting the vehicle speed to be equal to or lower than the upper limit vehicle speed based on the set vehicle speed set by the
The final target drive torque calculation unit 21De performs a select low between the first target drive torque output by the first target drive torque calculation unit 21Dc and the vehicle speed limiter torque calculated by the vehicle speed limiter torque calculation unit 21Dd. That is, the target drive torque is obtained by limiting the first target drive torque with the vehicle speed limiter torque.
車両状態モード決定部21Eは、アクセル開度APO、車速情報(又は変速機出力回転数)、モータ出力可能トルク、要求エンジン発電トルク、及び目標駆動トルクに基づき、車両状態モード領域マップ(EV−HEV遷移マップ)などを参照して、目標とする目標車両状態モード(EVモード、HEVモード)を決定する。例えば、車両制駆動制御のための目標駆動トルクに、エンジン1の始動に必要なクランキングトルクを加えたトルクが、モータジェネレータ2が出力可能なトルクを下回ると、HEVモードからEVモードに運転モードが遷移する。また、バッテリ充電等の要求などによって要求エンジン発電トルクがある場合には、目標とする目標車両状態モードをHEVモードとする。そして、現在の車両状態モードがEVモードであり、目標車両状態モードがHEVモードである場合には、エンジン始動シーケンスの処理を行う。また、現在の車両状態モードがHEVモードであり、目標車両状態モードがEVモードである場合には、エンジン停止シーケンスの処理を行う。
The vehicle state
ここで、車両状態モードとしては、図6に示すように、HEVモードと、EVモードと、遷移時のモードである、エンジン停止シーケンス及びエンジン始動シーケンスのモードとを備える。HEVモードは、少なくともエンジン1を駆動源として走行する車両状態モードである。エンジン停止シーケンスのモードは、HEVモードからEVモードに移行する際の遷移時の車両状態モードである。エンジン始動シーケンスのモードは、EVモードからHEVモードに移行する際の遷移時の車両状態モードである。そして、現在の車両状態モードと目標車両状態モードとが同じ場合には、前回の状態モードを保持する。例えば、現在の車両状態モードがEVモードで目標車両状態モードもEVモードの場合には、車両状態モードをEVモードとする。現在の車両状態モードがHEVモードで目標車両状態モードもHEVモードの場合には、車両状態モードをHEVモードとする。一方、現在の車両状態モードがEVモードで、目標車両状態モードがHEVモードの場合、若しくは現在の車両状態モードがHEVモードで、目標車両状態モードがEVモードの場合、遷移モードとして、エンジン1の停止若しくは始動の処理が完了するまでは、エンジン停止シーケンスのモード若しくはエンジン始動シーケンスのモードとなる。
Here, as shown in FIG. 6, the vehicle state mode includes an HEV mode, an EV mode, and an engine stop sequence mode and an engine start sequence mode that are modes at the time of transition. The HEV mode is a vehicle state mode in which the vehicle travels with at least the
また、車両状態モード決定部21Eは、エンジン停止について判定する。本実施形態の車両状態モード決定部21Eでは、下記の条件のいずれかを満足すると、エンジン始動要求フラグをOFFにする。下記条件のいずれも満足しない場合には、エンジン始動要求フラグをONにする。
・アクセル開度APOが予め設定したエンジン停止開度以下
・自動制御要求トルク(目標駆動トルク)が予め設定したエンジン停止トルク以下
但し、システム要求による停止禁止要求がある場合には、エンジン始動要求フラグをONとする。システム要求による停止禁止要求とは、例えばSOCが予め設定した値(SOC始動判定値)以下に低下している場合、水温が予め設定した温度以下の場合、モータジェネレータ2の許容回転数以上の車速などの場合である。また、本実施形態では、上記(1)のSOC停止判定値によるエンジン停止禁止要求や、上記(2)のエンジン停止タイマ判定値によるエンジン停止禁止要求がある場合には、エンジン始動要求フラグをONとする。
Moreover, the vehicle state
・ Accelerator opening APO is less than preset engine stop opening ・ Automatic control request torque (target drive torque) is less than preset engine stop torque However, if there is a stop prohibition request due to a system request, an engine start request flag Set to ON. The stop prohibition request due to the system request is, for example, when the SOC is lower than a preset value (SOC start determination value), when the water temperature is lower than the preset temperature, or when the vehicle speed is equal to or higher than the allowable rotational speed of the
そして、エンジン始動要求フラグがONの場合には、EVモードで無ければ、エンジン停止制御部21Gを作動する処理を実行する。
エンジン始動制御部21Fは、エンジン始動要求フラグがONの場合に作動して、モータ走行中にエンジン1を始動する処理を実施してHEVモードへの移行処理を行う。
具体的に、エンジン始動制御部21Fは、エンジン始動指令(エンジン始動要求フラグがON)を取得すると、まず第2クラッチ5を目標クラッチ伝達トルクにするための目標第2クラッチトルク指令を、ATコントローラ24に出力する。目標第2クラッチ伝達トルク指令は、エンジン始動処理前の出力トルク相当のトルクを伝達可能な伝達トルク指令であって、モータジェネレータ2が出力する駆動力を増大したとしても出力軸トルクに影響を与えない範囲とする。ここで、ATコントローラ24は、指令に応じたクラッチ油圧が発生するように第2クラッチ油圧ユニットを制御する。
When the engine start request flag is ON, if the EV mode is not set, processing for operating the engine
The engine
Specifically, when the engine
次に、エンジン始動制御部21Fは、モータコントローラ23に、モータジェネレータ2を回転数制御する指令を出力する。なお、モータジェネレータ2の実トルクはモータジェネレータ2に作用する負荷によって決定される。続いて、ATコントローラ24に対して、第1クラッチ4のトルク伝達トルクがエンジンクランキング用のトルクとなるトルク指令を出力する。続いて、エンジン回転数とモータ回転数とが同期したことを検知したら、クランキング処理の終了として第1クラッチ4を完全締結とする指令を出力する。第1クラッチ4の同期判定は、実モータ回転と実エンジン回転の差回転が規定値以下の状態が規定時間経過したときに同期したと判定する。規定値は第1クラッチ4のトルク制御中から完全締結移行時の応答無駄時間相当の差回転を設定する。さらに、エンジン回転数が始動可能回転数以上になったことを検知したら、エンジンコントローラ22に対してエンジン始動指令を出力する。
Next, the engine
エンジン停止制御部21Gは、エンジン停止指令(エンジン始動要求フラグがOFF)を取得すると起動し、エンジン走行から、エンジンを停止してモータジェネレータ2を駆動するEVモードへの移行処理を行う。
具体的に、エンジン停止制御部21Gは、エンジン停止指令(エンジン始動要求フラグがOFF)を取得すると起動して、まず、ATコントローラ24に対して、第1クラッチ4を滑り締結する予め設定したトルク指令を出力する。同期をとって、モータコントローラ23に、モータジェネレータ2を回転数制御する指令を出力する。これによって、第1クラッチ4によるエンジン1からのトルクを減少しつつ、モータトルクを増大して、目標駆動トルクを得る。目標モータトルクが目標駆動トルクとなったら、第1クラッチ4を目標クラッチ伝達トルク=0にするための目標第1クラッチトルク指令を、ATコントローラ24に出力する。その後、エンジンコントローラ22に対して目標エンジントルクとしてゼロを出力する。これによって、エンジンは燃料カット(F/C)され、エンジンは空回りしている状態となる。
The engine
Specifically, the engine
目標エンジントルク算出部21Hは、車両状態モード決定部21Eが決定した目標車両状態モード、車速などの走行状態情報、目標駆動トルク、発電のために要求される要求エンジン発電トルクに基づき、目標エンジントルク(指令エンジントルク)を算出する。なお、目標車両状態モードがEVモードである場合には、エンジントルクは不要であるので、目標エンジントルクは、ゼロ若しくは負値となっている。また、予め設定したF/C(燃料カット)条件を満足している場合には、エンジン1に対するF/Cが指示され、第1クラッチ4が開放状態の場合にエンジン1は無負荷状態で回転(空転)する状態となる。
The target engine
目標モータトルク算出部21Jは、車両状態モード決定部21Eが決定した目標車両状態モード、車速情報や第1クラッチの状態を示す情報などの走行状態情報、目標駆動トルク、要求発電トルクに基づき、目標モータトルクを算出する。具体的に、目標エンジントルクに遅れ補正(フィルタ処理)等を施して、推定エンジントルクを算出し、推定エンジントルクに第1クラッチ1の状態を反映して有効CL1トルクを算出する。そして、目標駆動トルクから、有効CL1トルクを減算した値を目標モータトルクとする。なお、他の制御部から回生ブレーキ要求トルク(<0)の入力がある場合には、目標モータトルクをその回生ブレーキ要求トルク分を足した値を最終的な目標モータトルク(指令MGトルク)とする。
The target motor
目標クラッチトルク算出部21Kは、車両状態モード決定部21Eが決定した目標車両状態モード、エンジン1及びモータジェネレータ2の発生トルクに基づき、第1クラッチ4及び第2クラッチ5の目標各クラッチトルクを算出する。なお、EVモード状態の場合には、ATコントローラ24に第1クラッチ4を開放する開放指令を出力すると共に、ATコントローラ24に第2クラッチ5の締結指令又はすべり締結指令を出力することで、第1クラッチ4を開放状態とすると共に、第2クラッチ5を締結状態又はすべり締結状態とする。また、HEVモード状態の場合には、ATコントローラ24に第1クラッチ4を締結する締結指令を出力すると共に、ATコントローラ24に第2クラッチ5の締結指令を出力することで、第1クラッチ4を締結状態とすると共に、第2クラッチ5を締結状態とする。また、エンジン始動若しくは停止処理の場合には、上述の締結開放状態となるクラッチトルクを算出する。
The target clutch
推定アクセル開度演算部21Lは、図3に示す例では、自動制御要求トルク演算部21Dbが出力する自動制御要求トルクと、車速リミッタトルク演算部21Ddが演算した車速リミッタトルクとのセレクトローを実施する。これにより、自動制御要求トルクと、車速リミッタトルクのいずれか小さい方のトルク(目標駆動トルク)がセレクトされる。そして、セレクトした目標駆動トルクと変速機入力回転数とから逆算して対応する推定アクセル開度(VAPO)を演算する。推定アクセル開度演算部21Lは、演算した推定アクセル開度を変速用アクセル開度としてATコントローラ24に出力する。
In the example shown in FIG. 3, the estimated accelerator
(目標トルク(指令トルク)算出処理)
次に、図7に基づき、統合コントローラ21において行われる目標トルク算出処理の処理手順を説明する。
ここで、図7は、目標トルク算出処理の処理手順の一例を示すフローチャートである。
統合コントローラ21において、プログラムが実行され、目標トルク算出処理が実行されると、図7に示すように、まず、ステップS100に移行する。
ステップS100では、目標駆動トルク演算部21Dにおいて、目標駆動トルクを演算する。そして、演算した目標駆動トルクを、車両状態モード決定部21E、目標エンジントルク算出部21H及び目標モータトルク算出部21Jにそれぞれ出力して、ステップS102に移行する。
(Target torque (command torque) calculation process)
Next, based on FIG. 7, the processing procedure of the target torque calculation process performed in the
Here, FIG. 7 is a flowchart showing an example of the processing procedure of the target torque calculation processing.
When the program is executed and the target torque calculation process is executed in the
In step S100, the target drive
ステップS102では、要求発電トルクベース演算部21Aにおいて、要求発電トルクべース演算処理を実行して、要求発電トルクベースを演算する。そして、演算した要求発電トルクベースを、要求エンジン発電トルク演算部21Bに出力して、ステップS104に移行する。
ステップS104では、要求エンジン発電トルク演算部21Bにおいて、要求エンジン発電トルク演算処理を実行して、要求エンジン発電トルクを演算する。そして、演算した要求エンジン発電トルクを、車両状態モード決定部21E及び目標エンジントルク算出部21Hにそれぞれ出力して、ステップS106に移行する。
In step S102, the required power generation torque
In step S104, the required engine power generation
ステップS106では、目標エンジントルク算出部21Hにおいて、目標エンジントルク算出処理を実行して、目標エンジントルクを算出する。そして、算出した目標エンジントルクをエンジンコントローラ22及び目標モータトルク算出部21Jにそれぞれ出力して、ステップS108に移行する。
ステップS108では、目標モータトルク算出部21Jにおいて、目標モータトルクを算出処理を実行して、目標モータトルク(目標MGトルク)を算出する。そして、算出した目標MGトルクを、モータコントローラ23に出力して、一連の処理を終了し、元の処理に復帰する。
In step S106, the target engine
In step S108, the target motor
(要求発電トルクベース演算処理)
次に、図8に基づき、上記ステップS102において、要求発電トルクベース演算部21Aで行われる要求発電トルクベース演算処理の処理手順を説明する。
ここで、図8は、要求発電トルクベース演算処理の処理手順の一例を示すフローチャートである。
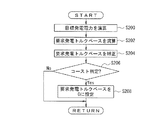
ステップS102において、要求発電トルクベース演算処理が実行されると、図8に示すように、まず、ステップS200に移行する。
ステップS200では、要求発電トルクベース演算部21Aにおいて、バッテリコントローラ26からのSOCに基づき、モータジェネレータ2で発電すべき目標発電電力を演算して、ステップS202に移行する。
(Required power generation torque base calculation processing)
Next, based on FIG. 8, the processing procedure of the required power generation torque base calculation process performed by the required power generation torque
Here, FIG. 8 is a flowchart illustrating an example of a processing procedure of the required power generation torque base calculation processing.
When the required power generation torque base calculation process is executed in step S102, first, the process proceeds to step S200 as shown in FIG.
In step S200, the required power generation torque
ステップS202では、要求発電トルクベース演算部21Aにおいて、ステップS200で演算した目標発電電力と、MG回転センサ11、又はAT入力回転センサ12からの入力軸回転数とに基づき、要求発電トルクベースを演算して、ステップS204に移行する。
具体的に、目標発電電力と入力軸回転数とからトルク換算して要求発電トルクベースを算出する。
ステップS204では、要求発電トルクベース演算部21Aにおいて、MG回転センサ11、又はAT入力回転センサ12からの入力軸回転数とに基づき、ステップS202で演算した、要求発電トルクベースを補正して、ステップS206に移行する。
具体的に、入力軸回転数に基づきエンジン最適動作点を用いるように発電トルクの補正を行う。
In step S202, the required power generation torque
Specifically, the required power generation torque base is calculated by converting the torque from the target generated power and the input shaft rotational speed.
In step S204, the required power generation torque
Specifically, the power generation torque is corrected so as to use the engine optimum operating point based on the input shaft rotational speed.
ステップS206では、要求発電トルクベース演算部21Aにおいて、目標駆動トルク演算部21Dからの目標駆動トルクと、設定されたコースト判定トルクとを比較し、目標駆動トルクがコースト判定トルク以下となったか否かを判定する。そして、コースト判定トルク以下になったと判定した場合(Yes)は、ステップS208に移行し、そうでないと判定した場合(No)は、ステップS204で補正後の要求発電トルクベースを要求エンジン発電トルク演算部21Bに出力して、一連の処理を終了して、元の処理に復帰する。
In step S206, the required power generation torque
コースト判定トルクは、例えば、「0[Nm]」付近の値に設定され、目標駆動トルクが目標車速を維持するのにコースト判定トルク以下のトルクを用いた場合に、コーストの条件が成立する。本実施形態では、コースト条件が成立していると判定した場合に、コースト判定フラグが「ON」に設定し、コースト条件が成立していないと判定した場合に、コースト判定フラグを「OFF」に設定する。 The coast determination torque is set to a value in the vicinity of “0 [Nm]”, for example, and the coast condition is satisfied when the target drive torque uses a torque equal to or less than the coast determination torque to maintain the target vehicle speed. In this embodiment, when it is determined that the coast condition is satisfied, the coast determination flag is set to “ON”, and when it is determined that the coast condition is not satisfied, the coast determination flag is set to “OFF”. Set.
コースト条件は、例えば、走行抵抗(R/L)が低い場合(低車速、下り勾配等)や、指令トルクに対して実駆動トルクが大きい場合等にトルクがマイナスになる状態において成立する。コースト条件成立時は、モータジェネレータ2の回生エネルギーによって、バッテリ9を充電することが可能となるため、エンジン1の回転トルクによる発電を停止する。
ステップS208に移行した場合は、要求発電トルクベース演算部21Aにおいて、要求発電トルクベースの値を「0[Nm]」に設定し、設定した要求発電トルクベースを要求エンジン発電トルク演算部21Bに出力して、一連の処理を終了し、元の処理に復帰する。
つまり、要求発電トルクベースの値を「0[Nm]」に設定することで、エンジン1の回転トルクによる発電を停止する。
The coast condition is satisfied in a state where the torque is negative, for example, when the running resistance (R / L) is low (low vehicle speed, downward gradient, etc.) or when the actual drive torque is larger than the command torque. When the coast condition is satisfied, the
When the process proceeds to step S208, the required power generation torque
That is, by setting the value of the required power generation torque base to “0 [Nm]”, power generation by the rotational torque of the
(要求エンジン発電トルク演算処理)
次に、図9に基づき、上記ステップS104において、要求エンジン発電トルク演算部21Bで行われる要求エンジン発電トルク演算処理の処理手順を説明する。
ここで、図9は、要求エンジン発電トルク演算処理の処理手順の一例を示すフローチャートである。
ステップS104において、要求エンジン発電トルク演算処理が実行されると、図9に示すように、まず、ステップS300に移行する。
ステップS300では、要求エンジン発電トルク演算部21Bにおいて、要求発電トルクベース演算部21Aからの要求発電トルクベースを取得して、ステップS302に移行する。
(Required engine power generation torque calculation processing)
Next, based on FIG. 9, the processing procedure of the required engine power generation torque calculation process performed by the required engine power generation
Here, FIG. 9 is a flowchart showing an example of a processing procedure of the required engine power generation torque calculation processing.
When the requested engine power generation torque calculation process is executed in step S104, the process first proceeds to step S300 as shown in FIG.
In step S300, the required engine power generation
ステップS302では、要求エンジン発電トルク演算部21Bにおいて、ATコントローラ24からの変速状態を示す情報(例えば、第2クラッチ5の締結、開放、滑り締結を示す情報)に基づき変速中か否かを判定する。そして、変速中(例えば、滑り締結状態)であると判定した場合(Yes)は、ステップS304に移行し、そうでないと判定した場合(No)は、ステップS308に移行する。
ステップS304に移行した場合は、要求エンジン発電トルク演算部21Bにおいて、要求エンジン発電トルクの変化率の上限値として、変速時レートリミットを設定して、ステップS320に移行する。
In step S302, the requested engine power generation
When the process proceeds to step S304, the required engine power generation
一方、ステップS302において、変速中では無いと判定されてステップS306に移行した場合は、要求エンジン発電トルク演算部21Bにおいて、クルーズ制御中か否かを判定する。そして、クルーズ制御中であると判定した場合(Yes)は、ステップS308に移行し、そうでないと判定した場合(No)は、ステップS314に移行する。
ステップS308に移行した場合は、要求エンジン発電トルク演算部21Bにおいて、コースト判定中か否かを判定し、コースト判定中であると判定した場合(Yes)は、ステップS310に移行し、そうでないと判定した場合(No)は、ステップS312に移行する。
On the other hand, if it is determined in step S302 that the gear is not being shifted and the process proceeds to step S306, the requested engine power generation
When the process proceeds to step S308, the requested engine power generation
ステップS310に移行した場合は、要求エンジン発電トルク演算部21Bにおいて、クルーズコースト時レートリミットを設定して、ステップS320に移行する。
また、ステップS312に移行した場合は、要求エンジン発電トルク演算部21Bにおいて、クルーズコースト以外時レートリミットを設定して、ステップS320に移行する。
また、ステップS306において、クルーズ制御中では無いと判定されステップS314に移行した場合は、要求エンジン発電トルク演算部21Bにおいて、コースト判定中か否かを判定する。そして、コースト判定中であると判定した場合(Yes)は、ステップS316に移行し、そうでないと判定した場合(No)は、ステップS318に移行する。
When the process proceeds to step S310, the requested engine power generation
When the process proceeds to step S312, the requested engine power generation
In Step S306, when it is determined that the cruise control is not being performed and the process proceeds to Step S314, the requested engine power generation
ステップS316に移行した場合は、要求エンジン発電トルク演算部21Bにおいて、コースト時レートリミットを設定して、ステップS320に移行する。
一方、ステップS318に移行した場合は、要求エンジン発電トルク演算部21Bにおいて、コースト以外時レートリミットを設定して、ステップS320に移行する。
ステップS320では、要求エンジン発電トルク演算部21Bにおいて、上記ステップS304、S310、S312、S316、S318のいずれかにおいて設定されたレートリミットに基づき、要求エンジン発電トルクを算出する。そして、算出した要求エンジン発電トルクを、車両状態モード決定部21E及び目標エンジントルク算出部21Hにそれぞれ出力して、一連の処理を終了し、元の処理に復帰する。
When the process proceeds to step S316, the requested engine power generation
On the other hand, when the process proceeds to step S318, the requested engine power generation
In step S320, the required engine power generation
本実施形態では、要求エンジン発電トルクを変化させる場合の変化率の大きさが予め定められたレートリミットを超えないように、目標となる要求エンジン発電トルクへと徐々に変更されていくように要求エンジン発電トルクの変化率の上限を制限する処理を行う。
つまり、今回算出した要求エンジン発電トルクの前回算出した同トルクに対する変化率が、レートリミットを超えているか否かを判定し、超えていると判定した場合は、レートリミットの変化率を超えないように、今回算出した要求エンジン発電トルクを補正する。一方、超えていないと判定した場合は、今回算出した要求エンジン発電トルクを、以降の処理にそのまま採用する。
In the present embodiment, it is requested that the rate of change when changing the required engine power generation torque is gradually changed to the target required engine power generation torque so that the rate of change does not exceed a predetermined rate limit. Processing for limiting the upper limit of the rate of change in engine power generation torque is performed.
In other words, it is determined whether the rate of change of the requested engine power generation torque calculated this time with respect to the previously calculated same torque exceeds the rate limit. If it is determined that the rate limit has exceeded, the rate limit change rate should not be exceeded. Then, the requested engine power generation torque calculated this time is corrected. On the other hand, when it is determined that it does not exceed, the requested engine power generation torque calculated this time is adopted as it is in the subsequent processing.
また、本実施形態では、ASCD制御やACC制御などのクルーズ制御が行われているクルーズ制御時と、クルーズ制御時以外の通常走行制御時と、コースト判定条件が成立しているコースト判定時と、変速中とにおいて、それぞれ異なるレートリミットを設定するようになっている。
具体的に、本実施形態では、(1)コースト時レートリミット、(2)コースト以外時レートリミット、(3)クルーズコースト時レートリミット、(4)クルーズコースト以外時レートリミット、(5)変速時レートリミットの順に大→小となるレートリミットを設定する。
Further, in the present embodiment, during cruise control in which cruise control such as ASCD control or ACC control is performed, during normal travel control other than during cruise control, and during coast determination when the coast determination condition is satisfied, Different rate limits are set during shifting.
Specifically, in this embodiment, (1) Coast rate limit, (2) Non-coast rate limit, (3) Cruise coast rate limit, (4) Non-cruise coast rate limit, (5) Shifting Set rate limits from large to small in the order of rate limits.
例えば、通常走行制御時において、コースト判定条件が成立している状態のときには、最も大きい値のコースト時レートリミットを設定し、一方、コースト判定条件が成立していない状態のときには、2番目に大きい値のコースト以外時レートリミットを設定する。
また、クルーズ制御時において、コースト判定条件が成立している状態のときには、3番目に大きい値のクルーズコースト時レートリミットを設定し、一方、コースト判定条件が成立していない状態のときには、2番目に小さい値のクルーズコースト以外時レートリミットを設定する。
For example, during normal travel control, when the coast determination condition is satisfied, the largest coast rate limit is set, while when the coast determination condition is not satisfied, the second largest value is set. Set a rate limit when the value is not coast.
In the cruise control, when the coast determination condition is satisfied, the third largest cruise coast rate limit is set. On the other hand, when the coast determination condition is not satisfied, the second value is set. Set a non-cruise coast hour rate limit.
そして、クルーズ制御時、通常走行制御時のいずれにおいても、変速中は、最も小さい値の変速時レートリミットを設定する。
ここで、レートリミットが大きな値であるとは、要求エンジン発電トルクを増加させる場合及び減少させる場合において、所定時間内に要求エンジン発電トルクをより大きく変化させることができることを意味している。要求エンジン発電トルクを増加させていく場合には、レートリミットが大きな値であるほど要求エンジン発電トルクの増加率が大きな値に設定され、要求エンジン発電トルクを減少させていく場合には、レートリミットが大きな値であるほど要求エンジン発電トルクの減少率が大きな値に設定される。なお、同一の制御において、要求エンジン発電トルクを増加させる場合のレートリミットの大きさと要求エンジン発電トルクを減少させる場合のレートリミットの大きさとは、異なる値に設定することが可能である。
In both the cruise control and the normal travel control, the shift rate limit with the smallest value is set during the shift.
Here, the rate limit being a large value means that the required engine power generation torque can be changed more greatly within a predetermined time when the required engine power generation torque is increased or decreased. When increasing the required engine power generation torque, the larger the rate limit is, the larger the rate of increase of the required engine power generation torque is set, and when decreasing the required engine power generation torque, the rate limit The larger the value is, the larger the reduction rate of the required engine power generation torque is set. In the same control, the magnitude of the rate limit when increasing the required engine power generation torque and the magnitude of the rate limit when decreasing the required engine power generation torque can be set to different values.
従って、本実施形態では、クルーズ制御時において、要求エンジン発電トルクを通常走行制御時よりも小さい変化量でゆっくりと目標値まで変化させる。特に、クルーズ制御時、通常走行制御時のいずれも、コースト条件が成立しているときは、要求エンジン発電トルクをコースト条件が成立していないときよりも小さい変化量でゆっくりと目標値まで変化させる。また、AT変速中においては、クルーズ制御時、通常走行制御時、コースト判定時の区別無く、要求エンジン発電トルクを最も小さい変化量で目標値まで変化させる。 Therefore, in the present embodiment, during the cruise control, the required engine power generation torque is slowly changed to the target value with a smaller change amount than during the normal travel control. In particular, when the coast condition is satisfied both during cruise control and during normal travel control, the required engine power generation torque is slowly changed to the target value with a smaller change amount than when the coast condition is not satisfied. . Further, during AT shift, the required engine power generation torque is changed to the target value with the smallest amount of change without distinction between cruise control, normal travel control, and coast determination.
以下、上記した、走行状態に応じて、要求エンジン発電トルクのレートリミットを切り換えて、要求エンジン発電トルクの変化率を制限する処理を、発電トルクレート制限処理という。
(目標エンジントルク算出処理)
次に、図10に基づき、上記ステップS106において、目標エンジントルク算出部21Hで行われる目標エンジントルク算出処理の処理手順を説明する。
ここで、図10は、目標エンジントルク算出処理の処理手順の一例を示すフローチャートである。
Hereinafter, the process of switching the rate limit of the required engine power generation torque and limiting the change rate of the required engine power generation torque according to the traveling state is referred to as a power generation torque rate limiting process.
(Target engine torque calculation process)
Next, based on FIG. 10, the processing procedure of the target engine torque calculation process performed in the target engine
Here, FIG. 10 is a flowchart showing an example of the processing procedure of the target engine torque calculation processing.
ステップS106において、目標エンジントルク算出処理が実行されると、図10に示すように、まず、ステップS400に移行する。
ステップS400では、目標エンジントルク算出部21Hにおいて、目標駆動トルク演算部21Dからの目標駆動トルクと、要求エンジン発電トルク演算部21Bからの要求エンジン発電トルクとを取得して、ステップS402に移行する。
When the target engine torque calculation process is executed in step S106, first, the process proceeds to step S400 as shown in FIG.
In step S400, the target engine
ステップS402では、目標エンジントルク算出部21Hにおいて、エンジン1が運転状態にあるか否かを判定し、運転状態にあると判定した場合(Yes)は、ステップS404に移行し、そうでないと判定した場合(No)は、ステップS408に移行する。
ステップS404に移行した場合は、目標エンジントルク算出部21Hにおいて、目標駆動トルクに、要求エンジン発電トルクを加算して、エンジントルクを算出して、ステップS406に移行する。
In step S402, the target engine
When the process proceeds to step S404, the target engine
ステップS406では、目標エンジントルク算出部21Hにおいて、ステップS404で算出したエンジントルクを補正して、目標エンジントルク(指令エンジントルク)を生成する。そして、生成した目標エンジントルクをエンジンコントローラ22に出力して、一連の処理を終了し、元の処理に復帰する。
一方、ステップS402において、エンジンが運転状態では無いと判定されステップS408に移行した場合は、F/C指令をエンジンコントローラ22に出力して、一連の処理を終了し、元の処理に復帰する。
In step S406, the target engine
On the other hand, if it is determined in step S402 that the engine is not in an operating state and the process proceeds to step S408, an F / C command is output to the
(目標MGトルク算出処理)
次に、図11に基づき、上記ステップS106において、目標モータトルク算出部21Jで行われる目標MGトルク算出処理の処理手順を説明する。
ここで、図11は、目標MGトルク算出処理の処理手順の一例を示すフローチャートである。
ステップS108において、目標MGトルク算出処理が実行されると、図11に示すように、まず、ステップS500に移行する。
ステップS500では、目標モータトルク算出部21Jにおいて、目標エンジントルク算出部21Hからの目標エンジントルクを取得して、ステップS502に移行する。
(Target MG torque calculation process)
Next, based on FIG. 11, the processing procedure of the target MG torque calculation process performed by the target motor
Here, FIG. 11 is a flowchart illustrating an example of a processing procedure of the target MG torque calculation processing.
When the target MG torque calculation process is executed in step S108, first, the process proceeds to step S500 as shown in FIG.
In step S500, the target motor
ステップS502では、目標モータトルク算出部21Jにおいて、ステップS500で取得した目標エンジントルクに対してフィルタリング処理による遅れ補正処理等を行って、推定エンジントルクを算出し、ステップS504に移行する。
ステップS504では、目標モータトルク算出部21Jにおいて、目標駆動トルク演算部21Dからの目標駆動トルクを取得して、ステップS506に移行する。
In step S502, the target motor
In step S504, the target motor
ステップS506では、目標モータトルク算出部21Jにおいて、ステップS504で取得した目標駆動トルクに対して第1クラッチ4の状態を反映して、有効CL1トルクを算出し、ステップS508に移行する。
ステップS508では、目標モータトルク算出部21Jにおいて、ステップS504で取得した目標駆動トルクから、ステップS506で算出した有効CL1トルクを減算してMGトルクを算出し、ステップS510に移行する。
ステップS510では、目標モータトルク算出部21Jにおいて、ステップS508で算出したMGトルクを補正して、目標MGトルクを生成し、一連の処理を終了して、元の処理に復帰する。
In step S506, the target motor
In step S508, the target motor
In step S510, the target motor
(動作)
次に、図12及び図13に基づき、本実施形態の動作を説明する。
ここで、図12は、本発明に係る発電トルクレート制限処理を実施した場合の、クルーズ制御時における、要求エンジン発電トルクを含む各エンジントルク、MGトルク、車速、目標車速等の各特性を示すタイムチャートである。また、図13は、本発明に係る発電トルクレート制限処理を実施しない場合の、クルーズ制御時における、要求エンジン発電トルクを含む各エンジントルク、MGトルク、車速、目標車速等の各特性を示すタイムチャートである。
(Operation)
Next, based on FIG.12 and FIG.13, operation | movement of this embodiment is demonstrated.
Here, FIG. 12 shows characteristics of each engine torque including the required engine power generation torque, MG torque, vehicle speed, target vehicle speed, etc. during cruise control when the power generation torque rate limiting process according to the present invention is performed. It is a time chart. FIG. 13 is a time chart showing the characteristics of each engine torque including the required engine power generation torque, MG torque, vehicle speed, target vehicle speed, etc. during cruise control when the power generation torque rate limiting process according to the present invention is not performed. It is a chart.
統合コントローラ21において、プログラムが実行され、目標トルク算出処理が実行されると、まず、目標駆動トルク算出処理が実行される(ステップS100)。なお、目標トルク算出処理は、メインルーチンから呼び出される処理であって、所定周期で繰り返し実行される処理である。
いま、定速走行制御が実施され、自動制御要求トルク演算部21DbのASCD車速サーボから出力されるクルーズ要求トルク(車速サーボ要求トルク)が0[Nm]よりも大きく、更に、平坦路を走行中で、コースト判定フラグが「OFF」であるとする。
When the program is executed and the target torque calculation process is executed in the
Now, the constant speed traveling control is performed, the cruise demand torque (vehicle speed servo demand torque) output from the ASCD vehicle speed servo of the automatic control demand torque calculation unit 21Db is larger than 0 [Nm], and is further running on a flat road. Therefore, it is assumed that the coast determination flag is “OFF”.
そして、定速走行制御により、ハイブリッド車両が定速走行を続け、やがて、走行路が平坦路から降坂路へと変化したとする。これにより、ASCD車速サーボで演算されたクルーズ要求トルク(車速サーボ要求トルク)は、負値へと変化したとする。この負値の目標駆動トルクは、第1目標駆動トルク演算部21Dcに出力される。そして、ドライバ要求トルクが「0」であるとして、第1目標駆動トルク演算部21Dcから、セレクトハイによってセレクトされたクルーズ要求トルク(負値)が、最終目標駆動トルク演算部21Deに出力される。そして、最終目標駆動トルク演算部21Deにおいて、目標駆動トルク演算部21Dcからのクルーズ要求トルクと、車速リミッタトルク演算部21Ddからの車速リミッタトルクとのセレクトローが実施され、いずれか低い方のトルクが目標駆動トルクとして目標エンジントルク算出部21Hに出力される。ここでは、目標駆動トルクの方が低く、図12中の(1)に示すように、0[Nm]よりも小さい目標駆動トルク(車速サーボ要求トルク)が出力されたとする。
Then, it is assumed that the hybrid vehicle continues to travel at a constant speed by the constant speed travel control, and eventually the travel path changes from a flat road to a downhill road. Accordingly, it is assumed that the cruise request torque (vehicle speed servo request torque) calculated by the ASCD vehicle speed servo changes to a negative value. This negative target drive torque is output to the first target drive torque calculator 21Dc. Then, assuming that the driver request torque is “0”, the cruise request torque (negative value) selected by the select high is output from the first target drive torque calculation unit 21Dc to the final target drive torque calculation unit 21De. Then, in the final target drive torque calculation unit 21De, a select low of the cruise request torque from the target drive torque calculation unit 21Dc and the vehicle speed limiter torque from the vehicle speed limiter torque calculation unit 21Dd is performed, and the lower torque is obtained. The target drive torque is output to the target engine
引き続き、要求発電トルクベース演算部21Aにおいて、要求発電トルクベース演算処理が実行される(ステップS102)。
かかる要求発電トルクベース演算部21Aは、まず、バッテリコントローラ26からのSOCに基づき、現在のバッテリ9の充電量と予め設定された充電量の下限値とから必要な充電量に対応する目標発電電力を算出する(ステップS200)。
次に、要求発電トルクベース演算部21Aは、目標発電電力と、MG回転センサ11からの入力軸回転数とに基づき、要求発電トルクベースを演算する(ステップS202)。
例えば、予めメモリ等に記憶された入力軸回転数と目標発電電力に対する要求発電トルクベースのマップデータから、要求発電トルクベースを演算する。
次に、要求発電トルクベース演算部21Aは、上記トルク換算して得られる要求発電トルクベースを、入力軸回転数に基づきエンジン最適動作点を用いるように補正する(ステップS204)。
Subsequently, the required power generation torque
First, the required power generation torque
Next, the required power generation torque
For example, the required power generation torque base is calculated from the map data of the required power generation torque base for the input shaft rotational speed and the target generated power stored in advance in a memory or the like.
Next, the required power generation torque
次に、要求発電トルクベース演算部21Aは、目標駆動トルクとコースト判定トルク(ここでは、0[Nm])とを比較し、コースト条件が成立しているか否かを判定する(ステップ206)。いま、目標駆動トルクは、図12中の(1)に示すように、0[Nm]よりも小さな値となっているので(ステップS206の「Yes」)、コースト判定フラグは、図12中の(2)に示すように「ON」に設定される。そして、要求発電トルクベース演算部21Aは、要求発電トルクベースを「0[Nm]」に設定し、設定した要求発電トルクベース(0[Nm])を、要求エンジン発電トルク演算部21Bに出力し、一連の処理を終了し、元の処理に復帰する。
Next, the required power generation torque
引き続き、要求エンジン発電トルク演算部21Bにおいて、要求エンジン発電トルク演算処理が実行される(ステップS104)。
かかる要求エンジン発電トルク演算部21Bは、要求発電トルクベース演算部21Aからの要求発電トルクベースを取得すると(ステップS300)、まず、ATコントローラ24からの変速状態を示す情報に基づき、現在変速中か否かを判定する(ステップS302)。ここでは、変速中では無いとして(ステップS302の「No」)、次に、ステアリングスイッチ28の各スイッチの設定状態を示す情報に基づき、クルーズ制御中であるか否かを判定する(ステップS306)。
Subsequently, the required engine power generation
When the required engine power generation
現在、クルーズ制御中(定速走行制御中)であるので(ステップS306の「Yes」)、要求エンジン発電トルク演算部21Bは、次に、コースト判定中か否かを判定する(ステップS308)。現在、コースト判定フラグは「ON」に設定されているので(ステップS308の「Yes」)、要求エンジン発電トルク演算部21Bは、クルーズコースト時レートリミット値を設定する(ステップS310)。そして、要求エンジン発電トルク演算部21Bは、まず、要求発電トルクベース演算部21Aで演算した要求発電トルクベースの前回値からの変化量が、クルーズコースト時レートリミット値で設定される上限値を超えているか否かを判定する。この判定処理により、要求エンジン発電トルク演算部21Bは、超えていると判定した場合は、要求発電トルクベースの値を上限値を超えないように補正して、これを要求エンジン発電トルクとして、車両状態モード決定部21E及び目標エンジントルク算出部21Hに出力する。一方、超えていないと判定した場合は、要求発電トルクベースをそのまま要求エンジン発電トルクとして、車両状態モード決定部21E及び目標エンジントルク算出部21Hに出力する。
Since it is currently under cruise control (during constant speed running control) (“Yes” in step S306), the requested engine power
ここでは、前回値Te1が図12中の(3)に示すように、比較的大きなトルク値となっているため、要求発電トルクベースがクルーズコースト時レートリミット値で設定される上限値を超えていると判定する。なお、図12の例では、発電に使用されるトルクを負値で示している。これにより、要求エンジン発電トルク演算部21Bは、要求発電トルクベース(0)を、前回値Te1からの変化率が上限値を超えない値Te2へと補正する。
Here, since the previous value Te1 is a relatively large torque value as indicated by (3) in FIG. 12, the required power generation torque base exceeds the upper limit set by the cruise coast rate limit value. It is determined that In the example of FIG. 12, the torque used for power generation is shown as a negative value. Thereby, the required engine power generation
具体的に、要求エンジン発電トルク演算部21Bは、両者の差分であるTα(Tα=Te1−Te2)が、「Tα≦上限値」となるように補正する。そして、補正した要求エンジン発電トルクベース(Te2)を、要求エンジン発電トルクとして、目標エンジントルク算出部21Hに出力する(ステップS320)。これにより、図12中の(4)に示すように、前回値Te1からTαだけ変化する値のトルクTe2が、要求エンジン発電トルクとして出力される。
引き続き、目標エンジントルク算出部21Hにおいて、目標エンジントルク算出処理が実行される(ステップS108)。
Specifically, the required engine power generation
Subsequently, a target engine torque calculation process is executed in the target engine
かかる目標エンジントルク算出部21Hは、まず、目標駆動トルク演算部21Dからの目標駆動トルク(負値)と、要求エンジン発電トルク演算部21Bからの要求エンジン発電トルク(Te2)を取得する(ステップS400)。そして、エンジンコントローラ22からのエンジン1の運転状態を示す情報に基づき、エンジン1が運転状態か否かを判定する(ステップS402)。ここでは、エンジン1は運転状態であるとして(ステップS402の「Yes」)、目標エンジントルク算出部21Hは、次に、取得した、目標駆動トルクに要求エンジン発電トルクを加算して、エンジントルクを算出する(ステップS404)。そして、目標エンジントルク算出部21Hは、算出したエンジントルクを補正し、補正後のエンジントルクを目標エンジントルク(指令エンジントルク)として、エンジンコントローラ22及び目標モータトルク算出部21Jに出力する(ステップS406)。
The target engine
これにより、図12中の(5)に示すように、要求駆動トルク分に、図12中の(4)に示すトルク(Te2)を正値にして加算したような目標(指令)エンジントルク(補正分を含む)が出力される。この目標エンジントルクをTo2、前回の目標エンジントルクをTo1とすると、図12中の(5)に示すように、これらの差分Tβは、上記差分Tαに対応するトルク減少分となる。
引き続き、目標モータトルク算出部21jにおいて、目標モータトルク算出処理が実行される(ステップS110)。
かかる目標モータトルク算出部21jは、まず、目標エンジントルク算出部21Hからの目標エンジントルクを取得して(ステップS500)、取得した目標エンジントルクにフィルタ処理による遅れ補正処理等を施して、推定エンジントルクを算出する(ステップS502)。
As a result, as shown in (5) in FIG. 12, the target (command) engine torque (the torque (Te2) shown in (4) in FIG. Is output). Assuming that this target engine torque is To2 and the previous target engine torque is To1, as shown in (5) in FIG. 12, these differences Tβ are torque reductions corresponding to the differences Tα.
Subsequently, a target motor torque calculation process is executed in the target motor torque calculation unit 21j (step S110).
The target motor torque calculation unit 21j first acquires the target engine torque from the target engine
次に、目標モータトルク算出部21jは、目標駆動トルク演算部21Dからの目標駆動トルクを取得し、取得した目標駆動トルクに第1クラッチ4の状態を反映させて、有効CL1トルクを算出する(ステップS504)。
更に、目標モータトルク算出部21jは、目標駆動トルクから有効CL1トルクを減算してMGトルクを算出し(ステップS506)、算出したMGトルクを補正することで、目標MGトルクを生成する(ステップS510)。そして、目標モータトルク算出部21jは、生成した目標MGトルク(指令MGトルク)をモータコントローラ23に出力する。
Next, the target motor torque calculation unit 21j acquires the target drive torque from the target drive
Further, the target motor torque calculation unit 21j calculates the MG torque by subtracting the effective CL1 torque from the target drive torque (Step S506), and corrects the calculated MG torque to generate the target MG torque (Step S510). ). Then, the target motor torque calculation unit 21j outputs the generated target MG torque (command MG torque) to the
これにより、図12中の(6)に示すように、発電トルク分から、図12中の(5)に示すトルク(To2)を減算したような目標(指令)MGトルク(補正分を含む)が出力される。この目標MGトルクをTm2、前回の目標MGトルクをTm1とすると、図12中の(6)に示すように、これらの差分Tγは、上記差分Tβに対応するトルク減少分となる。
つまり、上記一連の処理で説明したように、要求エンジン発電トルクの変化量をクルーズコースト時レートリミットによって設定される上記Tαを上限として制御することで、図12中(4)の傾斜線に示すように、要求エンジン発電トルクは、変化量Tαで最終的な目標値である「0[Nm]」に向けて、徐々に変化するようになる。
As a result, as shown in (6) in FIG. 12, a target (command) MG torque (including a correction amount) obtained by subtracting the torque (To2) shown in (5) in FIG. Is output. Assuming that the target MG torque is Tm2 and the previous target MG torque is Tm1, as shown in (6) in FIG. 12, these differences Tγ are torque reductions corresponding to the differences Tβ.
That is, as described in the above series of processes, the change amount of the required engine power generation torque is controlled with the above-mentioned Tα set by the cruise coast rate limit as the upper limit, and is shown by the inclined line (4) in FIG. Thus, the required engine power generation torque gradually changes toward the final target value “0 [Nm]” with the change amount Tα.
そして、要求エンジン発電トルクが徐々に変化することで、図12中(5)の実線の傾斜線に示すように、指令エンジントルクも、上記Tαによって制限される変化量で徐々に目標値に向かって変化する。
また、指令エンジントルクから生成される目標MGトルクについても、指令エンジントルクが徐々に変化することで、図12中(6)の傾斜線に示すように、上記Tαによって制限される変化量で徐々に目標値に向かって変化する。
Then, as the required engine power generation torque changes gradually, the command engine torque gradually moves toward the target value with the amount of change limited by Tα, as shown by the solid line in FIG. 12 (5). Change.
Also, with respect to the target MG torque generated from the command engine torque, as the command engine torque gradually changes, as shown by the sloped line (6) in FIG. Changes toward the target value.
ここで、図13に基づき、コースト判定フラグが「OFF」から「ON」に切り替わったときに、発電トルクレート制限処理を実施しない場合の動作を説明する。
例えば、走行路が平坦路から降坂路へと変化し、図13中(1)に示すように、目標駆動トルクが正値から負値に変化することで、図13中(2)に示すように、コースト判定フラグが「ON」に設定される(ステップS206の「Yes」)。これにより、要求発電トルクベースが「0」に設定される(ステップS208)。
ここでは、発電トルクレート制限処理を実施しないため、図13中(3)に示すように、要求エンジン発電トルクが、そのまま「0」に設定される。
Here, based on FIG. 13, an operation when the power generation torque rate limiting process is not performed when the coast determination flag is switched from “OFF” to “ON” will be described.
For example, when the traveling road changes from a flat road to a downhill road and the target drive torque changes from a positive value to a negative value as shown in (1) in FIG. 13, as shown in (2) in FIG. In addition, the coast determination flag is set to “ON” (“Yes” in step S206). Thereby, the required power generation torque base is set to “0” (step S208).
Here, since the power generation torque rate limiting process is not performed, the required engine power generation torque is set to “0” as it is, as indicated by (3) in FIG.
これにより、要求エンジン発電トルクが前回値Te1から「0」へと大幅に変化し、これに追随して指令エンジントルクが、図13中(5)に示すように、急激に変化する。
従って、指令エンジントルクから生成される目標MGトルクについても、指令エンジントルクに追随して、急激に変化することになる。
つまり、コースト判定時には要求エンジン発電トルクを0[Nm]にするため、「目標駆動トルク−要求エンジン発電トルク」で生成される指令エンジントルクが急変する。
As a result, the required engine power generation torque changes significantly from the previous value Te1 to “0”, and the command engine torque changes rapidly following this, as shown in FIG. 13 (5).
Therefore, the target MG torque generated from the command engine torque also changes rapidly following the command engine torque.
That is, since the required engine power generation torque is set to 0 [Nm] at the time of coast determination, the command engine torque generated by “target drive torque−required engine power generation torque” suddenly changes.
目標MGトルクは「目標駆動トルク−推定エンジントルク」の差分で算出される。そして、実駆動トルク(指令エンジントルク+指令MGトルク)が、目標駆動トルクとなるように制御が行われる。推定エンジントルクは、指令エンジントルクのフィルタ処理を行って算出しており、必ずしも実エンジントルクと一致する訳ではない。特に、トルクが過渡的に変化する場合は、推定エンジントルクと実エンジントルクとがずれる傾向にある。 The target MG torque is calculated by the difference of “target drive torque−estimated engine torque”. Then, control is performed so that the actual drive torque (command engine torque + command MG torque) becomes the target drive torque. The estimated engine torque is calculated by filtering the command engine torque, and does not necessarily match the actual engine torque. In particular, when the torque changes transiently, the estimated engine torque and the actual engine torque tend to shift.
従って、推定エンジントルクと実エンジントルクとがずれた分は、実駆動トルクが変動する事になるため、図13に示すように、車速が変動する。車速が変動するとASCD車速サーボ制御により目標駆動トルクが変動し、コースト判定状態が変化する。これにより、要求エンジン発電トルクが変化し、指令エンジントルクが急変する。
これに対して、上記発電トルクレート制限処理を実施する本発明においては、上述したように要求エンジン発電トルクを緩やかに変化させるため、指令エンジントルクの変化も緩やかになる。これにより、推定エンジントルクが実エンジントルクを精度良く推定できるため、実駆動トルクも目標駆動トルク通りとなる。その結果、図12に示すように、コースト判定時においても、車速変動が生じない。
Accordingly, since the actual driving torque varies due to the deviation between the estimated engine torque and the actual engine torque, the vehicle speed varies as shown in FIG. When the vehicle speed fluctuates, the target driving torque fluctuates by the ASCD vehicle speed servo control, and the coast determination state changes. As a result, the required engine power generation torque changes, and the command engine torque changes suddenly.
On the other hand, in the present invention in which the power generation torque rate limiting process is performed, since the required engine power generation torque is gradually changed as described above, the change in the command engine torque is also gentle. As a result, the estimated engine torque can accurately estimate the actual engine torque, so that the actual drive torque also matches the target drive torque. As a result, as shown in FIG. 12, the vehicle speed does not fluctuate even during coast determination.
次に、図12に基づき、走行路が降坂路から平坦路に変化した場合の本実施形態の動作を説明する。
走行路が降坂路から平坦路に変化することで、図12中(7)に示すように、目標駆動トルクが正値に変化すると、コースト判定フラグが「OFF」に設定される(ステップS206の「No」)。これにより、ステップS204で補正後の要求発電トルクベースがそのまま要求エンジン発電トルク演算部21Bに出力される。
そして、変速中では無く(ステップS302の「No」)、定速走行制御中であるとして(ステップS306の「Yes」)、要求エンジン発電トルク演算部21Bは、コースト判定中であるか否かを判定する(ステップS308)。
Next, based on FIG. 12, the operation of the present embodiment when the traveling road changes from a downhill road to a flat road will be described.
When the travel path changes from a downhill road to a flat road, as shown in (7) in FIG. 12, when the target drive torque changes to a positive value, the coast determination flag is set to “OFF” (in step S206). "No"). As a result, the required power generation torque base corrected in step S204 is output to the required engine power generation
Then, it is determined that constant speed running control is being performed (“Yes” in step S306), not during shifting (“No” in step S302), and the requested engine power generation
現在、コースト判定フラグは「OFF」となっているので、要求エンジン発電トルク演算部21Bは、コースト判定中では無いと判定し(ステップS308の「No」)、クルーズコースト以外時レートリミットを設定する(ステップS312)。そして、要求エンジン発電トルク演算部21Bは、まず、要求発電トルクベース演算部21Aで演算した要求発電トルクベースの前回値からの変化量が、クルーズコースト以外時レートリミット値で設定される上限値を超えているか否かを判定する。図12中(8)に示すように、要求エンジン発電トルクが前回値「0」から、Te1へと大幅に変化しているので、要求発電トルクベースがクルーズコースト以外時レートリミット値で設定される上限値を超えていると判定する。これにより、要求エンジン発電トルク演算部21Bは、要求発電トルクベース(0)を、前回値「0」からの変化率が上限値を超えない値へと補正する(ステップS320)。
Since the coast determination flag is currently “OFF”, the requested engine power generation
また、本実施形態では、クルーズコースト以外時レートリミットを、クルーズコースト時レートリミットよりも少し大きな値としているため、図12中(9)の傾斜線に示すように、クルーズコースト時と比較して、わずかに変化速度(傾斜)が速く(急)なっている。
このように、クルーズ制御中は、コースト条件が成立していないときにも、要求エンジン発電トルクの変化量に、クルーズコースト以外時レートリミットによる制限を設けている。これにより、要求エンジン発電トルクは、図12中(9)の傾斜線に示すように、クルーズコースト以外時レートリミットによる上限値を最大変化量として目標値に向けて徐々に変化する。
Further, in this embodiment, since the rate limit at the time other than the cruise coast is a little larger than the rate limit at the time of the cruise coast, as shown by the inclined line (9) in FIG. The rate of change (inclination) is slightly faster (steep).
As described above, during cruise control, even when the coast condition is not satisfied, the amount of change in the requested engine power generation torque is limited by a rate limit other than during cruise coast. As a result, the required engine power generation torque gradually changes toward the target value with the upper limit value due to the time limit other than the cruise coast as the maximum change amount, as indicated by the inclined line (9) in FIG.
そして、要求エンジン発電トルクが徐々に変化することで、図12中(10)の実線の傾斜線に示すように、指令エンジントルクも、クルーズコースト以外時レートリミットによる上限値によって制限される変化量で徐々に目標値に向かって変化する。
また、指令エンジントルクから生成される目標MGトルクについても、指令エンジントルクが徐々に変化することで、図12中(11)の傾斜線に示すように、クルーズコースト以外時レートリミットによる上限値によって制限される変化量で徐々に目標値に向かって変化する。
Then, as the required engine power generation torque changes gradually, the command engine torque is also limited by the upper limit value due to the time limit other than the cruise coast, as indicated by the solid inclined line (10) in FIG. It gradually changes toward the target value.
Also, with respect to the target MG torque generated from the command engine torque, as the command engine torque gradually changes, as indicated by the sloped line (11) in FIG. It gradually changes toward the target value with the limited amount of change.
一方、図13に基づき、コースト判定フラグが「ON」から「OFF」に切り替わったときに、発電トルクレート制限処理を実施しない場合の動作を説明する。
例えば、走行路が降坂路から平坦路へと変化し、目標駆動トルクが負値から正値に変化することで、図13中(7)に示すように、コースト判定フラグが「OFF」に設定される(ステップS206の「No」)。これにより、要求発電トルクベースは、ステップS204で補正後の値がそのまま要求エンジン発電トルク演算部21Bに出力される。
On the other hand, based on FIG. 13, the operation when the power generation torque rate limiting process is not performed when the coast determination flag is switched from “ON” to “OFF” will be described.
For example, when the traveling road changes from a downhill road to a flat road and the target driving torque changes from a negative value to a positive value, the coast determination flag is set to “OFF” as shown in (7) in FIG. (“No” in step S206). As a result, the value of the required power generation torque base is directly output to the required engine power generation
ここでは、発電トルクレート制限処理を実施しないため、図13中(8)及び(9)に示すように、要求発電トルクベース演算部21Aで演算された要求発電トルクベースが、要求エンジン発電トルク(ここでは、Te1)として、そのまま設定される。
これにより、要求エンジン発電トルクが前回値「0」から「Te1」へと大幅に変化し、これに追随するために指令エンジントルクが、図13中(10)に示すように、急激に変化する。
従って、指令エンジントルクから生成される目標MGトルクについても、指令エンジントルクに追随して、急激に変化することになる。
Here, since the power generation torque rate limiting process is not performed, as shown in (8) and (9) in FIG. 13, the required power generation torque base calculated by the required power generation torque
As a result, the required engine power generation torque changes greatly from the previous value “0” to “Te1”, and the command engine torque changes rapidly as shown in FIG. 13 (10) in order to follow this. .
Therefore, the target MG torque generated from the command engine torque also changes rapidly following the command engine torque.
つまり、このような急激な変化は、コースト判定時のときと同様に、推定エンジントルクと実エンジントルクとにずれを生じさせるため、推定エンジントルクと実エンジントルクとがずれた分は、実駆動トルクが変動する。そのため、図13に示すように、コースト判定状態(コースト判定フラグON)からそうではない状態(コースト判定フラグOFF)に切り替わるときにも車速が変動する。車速が変動するとASCD車速サーボ制御により目標駆動トルクが変動し、コースト判定状態が変化する。これにより、要求エンジン発電トルクが変化し、指令エンジントルクが急変する。 That is, since such a sudden change causes a shift between the estimated engine torque and the actual engine torque as in the coast determination, the difference between the estimated engine torque and the actual engine torque is the actual drive. Torque fluctuates. Therefore, as shown in FIG. 13, the vehicle speed also changes when the coast determination state (coast determination flag ON) is switched to the other state (coast determination flag OFF). When the vehicle speed fluctuates, the target driving torque fluctuates by the ASCD vehicle speed servo control, and the coast determination state changes. As a result, the required engine power generation torque changes, and the command engine torque changes suddenly.
これに対して、上記発電トルクレート制限処理を実施する本発明においては、上述したようにコースト判定時以外のときでも、要求エンジン発電トルクを緩やかに変化させるため、指令エンジントルクの変化も緩やかにすることができる。これにより、推定エンジントルクが実エンジントルクを精度良く推定できるため、実駆動トルクも目標駆動トルク通りとなる。その結果、図12に示すように、コースト判定時からそうでない状態に切り替わったときにおいても、車速変動が生じない。 On the other hand, in the present invention that implements the power generation torque rate limiting process, as described above, the required engine power generation torque is gradually changed even at times other than during coast determination. can do. As a result, the estimated engine torque can accurately estimate the actual engine torque, so that the actual drive torque also matches the target drive torque. As a result, as shown in FIG. 12, the vehicle speed does not fluctuate even when the coast determination is switched to a state other than that.
ここで、モータジェネレータ2は、「モータ」、及び「発電手段」に対応し、インバータ8は、「充電手段」に対応し、バッテリコントローラ26は、「充電量算出手段」に対応する。
また、要求発電トルクベース演算部21Aは、「目標発電電力算出手段」及び「要求発電トルク算出手段」に対応し、要求エンジン発電トルク演算部21Bは、「制限手段」に対応し、目標駆動トルク(車速サーボ要求トルク)は、「要求駆動トルク」に対応する。
また、ステップS206、S308、S314は、「判定手段」に対応し、「要求発電トルクベース」は、「制限手段の制限処理前の要求発電トルク」に対応し、「要求エンジン発電トルク」は、「制限手段の制限処理後の要求発電トルク」に対応する。
Here, the
Further, the required power generation torque
Steps S206, S308, and S314 correspond to “determination means”, “required power generation torque base” corresponds to “required power generation torque before restriction processing of restriction means”, and “required engine power generation torque” This corresponds to “required power generation torque after restriction processing by the restriction means”.
(本実施形態の効果)
(1)充電量算出手段がバッテリの充電量を算出する。目標発電電力算出手段がバッテリの充電量に基づき目標発電電力を算出する。要求発電トルク算出手段が目標発電電力の発電を行うためのエンジン回転トルクである要求発電トルクを算出する。制限手段が要求発電トルクの変化率の上限値を制限する。そして、制限手段が、自動走行制御が実施されているときに、要求発電トルクの変化率の上限値を、通常走行制御が実施されているときの上限値よりも小さい値に制限する。
(Effect of this embodiment)
(1) The charge amount calculation means calculates the charge amount of the battery. The target generated power calculation means calculates the target generated power based on the charge amount of the battery. The required power generation torque calculating means calculates a required power generation torque that is an engine rotation torque for generating the target generated power. The limiting means limits the upper limit value of the change rate of the required power generation torque. Then, the limiting means limits the upper limit value of the change rate of the required power generation torque to a value smaller than the upper limit value when the normal travel control is performed when the automatic travel control is performed.
つまり、自動走行制御中においては、要求発電トルクの変化率の上限値が、通常走行制御時よりも小さい値に制限されるので、要求発電トルクを、通常走行制御時と比較して目標値まで緩やかに変化させることができる。
例えば、エンジン回転トルクによる発電が不要な状況になると、エンジン回転トルクによる発電を停止するため、この切り替わりのときに要求発電トルク(要求エンジン発電トルク)が急激に変化する。そのため、要求発電トルクから生成される推定エンジントルクも急激に変化し、この変化に実エンジントルクが追随することができず、両者のずれが速度変動を生じさせる。
In other words, during automatic travel control, the upper limit value of the rate of change in required power generation torque is limited to a value smaller than that during normal travel control. It can be changed slowly.
For example, when power generation by the engine rotation torque is not necessary, power generation by the engine rotation torque is stopped, so that the required power generation torque (required engine power generation torque) changes rapidly at the time of switching. For this reason, the estimated engine torque generated from the required power generation torque also changes abruptly, the actual engine torque cannot follow this change, and the deviation between the two causes speed fluctuations.
このような状況において、要求発電トルクの変化を緩やかにすることができるので、指令エンジントルク、ひいては推定エンジントルクの変化を緩やかにすることができ、推定エンジントルクと実エンジントルクとのずれを小さくすることができる。
これにより、要求発電トルクが急激に変化するような状況において生じる走行速度の変動を抑制することができるという効果が得られる。
In such a situation, since the change in the required power generation torque can be made gentle, the change in the command engine torque and hence the estimated engine torque can be made gentle, and the deviation between the estimated engine torque and the actual engine torque can be reduced. can do.
Thereby, the effect that the fluctuation | variation of the traveling speed which arises in the condition where a request | requirement power generation torque changes rapidly can be suppressed.
(2)自動走行制御は、ハイブリッド車両の走行速度を、設定した目標速度で維持するように自動調整する制御である定速走行制御を含む。
(3)モータが、発電手段を構成する。
これにより、モータと、発電手段との一体化による部品の共通化、省スペース化などが実現できるので、モータと発電手段とを別々に備える構成と比較して、コストを低減することができるという効果が得られる。
(4)自動走行制御が実施されているときに、設定した目標発電電力の発電を行うためのエンジン回転トルクである要求発電トルクの変化率の上限値を、通常走行制御が実施されているときの上限値よりも小さい値に制限する。
これにより、要求発電トルクが急激に変化するような状況において生じる走行速度の変動を抑制することができるという効果が得られる。
(2) The automatic travel control includes constant speed travel control that is a control that automatically adjusts the travel speed of the hybrid vehicle so as to maintain the set target speed.
(3) The motor constitutes power generation means.
This makes it possible to share parts by integrating the motor and the power generation means, save space, etc., so that the cost can be reduced compared to a configuration in which the motor and the power generation means are separately provided. An effect is obtained.
(4) When the automatic travel control is being performed, the upper limit value of the rate of change in the required power generation torque, which is the engine rotation torque for generating the set target generated power, is being used for the normal travel control. It is limited to a value smaller than the upper limit value.
Thereby, the effect that the fluctuation | variation of the traveling speed which arises in the condition where a request | requirement power generation torque changes rapidly can be suppressed.
(応用例)
上記実施形態において、定速走行制御(ASCD制御)中を例に挙げて動作を説明したが、ACC制御中においても同様の発電トルクレート制限処理を実施することが可能である。
これにより、車間制御中における、要求エンジン発電トルクの急激な変化による車速の変動を抑制することができる。
また、上記実施形態では、クルーズ制御中、通常走行制御中の2種類の走行制御について、要求エンジン発電トルクに対して異なるレートリミットを設定する構成を説明したが、この構成に限らない。例えば、他の走行制御や、スポーツモードやエコモード等の走行モードを実施可能な構成の場合は、他の走行制御や各走行モードについても適切なレートリミットを設定して、要求エンジン発電トルクの適切な変動制限処理を実行する構成としてもよい。
(Application examples)
In the above embodiment, the operation has been described by taking constant speed traveling control (ASCD control) as an example, but it is possible to perform the same power generation torque rate limiting process even during ACC control.
Thereby, the fluctuation | variation of the vehicle speed by the sudden change of a request | requirement engine electric power generation torque during a vehicle distance control can be suppressed.
Moreover, although the said embodiment demonstrated the structure which sets a different rate limit with respect to a request | required engine electric power generation torque about two types of traveling control during cruise control and normal traveling control, it is not restricted to this structure. For example, in the case of a configuration that can implement other travel controls or travel modes such as sports mode and eco mode, set appropriate rate limits for other travel controls and each travel mode, and An appropriate variation limiting process may be executed.
これにより、走行制御や走行モードの内容に応じて、適切な要求エンジン発電トルクの変動制限処理を行うことができる。
また、上記実施形態において、エンジン回転トルクによって発電する機能(以下、第1の発電機能と称す)と、減速時の外力によるモータ回転トルクによって発電する機能(以下、第2の発電機能と称す)とをモータジェネレータ2が備える構成を説明したが、この構成に限らない。
As a result, it is possible to perform a variation limiting process of the required engine power generation torque in accordance with the content of the travel control and the travel mode.
In the above-described embodiment, a function of generating electric power by engine rotation torque (hereinafter referred to as a first power generation function) and a function of generating electric power by motor rotation torque by an external force during deceleration (hereinafter referred to as a second power generation function). However, the present invention is not limited to this configuration.
例えば、第1の発電機能を備える発電機を別途備える構成や、モータと発電機の機能とを完全に分けて、例えば、第1の発電機能を備える第1の発電機及び第2の発電機能を備える第2の発電機をそれぞれ別々に備える構成や、第1及び第2の発電機能を備える発電機を別途備える構成などとしてもよい。
また、上記実施形態は、本発明の好適な具体例であり、技術的に好ましい種々の限定が付されているが、本発明の範囲は、上記の説明において特に本発明を限定する旨の記載がない限り、これらの形態に限られるものではない。また、上記の説明で用いる図面は、図示の便宜上、部材ないし部分の縦横の縮尺は実際のものとは異なる模式図である。
また、本発明は上記各実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
For example, a configuration separately including a generator having a first power generation function, or a function of a motor and a generator are completely separated, for example, a first generator and a second power generation function having a first power generation function. It is good also as a structure provided with the 2nd generator provided separately, respectively, the structure provided separately with the generator provided with the 1st and 2nd power generation function.
The above embodiments are preferable specific examples of the present invention, and various technically preferable limitations are given. However, the scope of the present invention is described in particular in the above description to limit the present invention. As long as there is no, it is not restricted to these forms. In the drawings used in the above description, for convenience of illustration, the vertical and horizontal scales of members or parts are schematic views different from actual ones.
Further, the present invention is not limited to the above-described embodiments, and modifications, improvements, and the like within the scope that can achieve the object of the present invention are included in the present invention.
1 エンジン
2 モータジェネレータ
4 第1クラッチ
5 第2クラッチ
7 駆動輪
20 アクセルセンサ
21 統合コントローラ
21A 要求発電トルクベース演算部
21B 要求エンジン発電トルク演算部
21C モータ出力可能トルク演算部
21D 目標駆動トルク演算部
21Da ドライバ要求トルク演算部
21Db 自動制御要求トルク演算部
21Dc 第1目標駆動トルク演算部
21Dd 車速リミッタトルク演算部
21De 最終目標駆動トルク演算部
21E 車両状態モード決定部
21Ea エンジン始動判定処理部
21Eb エンジン停止判定処理部
21F エンジン始動制御部
21G エンジン停止制御部
21H 目標エンジントルク算出部
21J 目標モータトルク算出部
21K 目標クラッチトルク算出部
21L VAPO演算
22 エンジンコントローラ
23 モータコントローラ
24 ATコントローラ
25 ブレーキコントローラ
26 バッテリコントローラ
28 ステアリングスイッチ
30 クルーズキャンセルスイッチ
31 車間制御コントローラ
DESCRIPTION OF
Claims (6)
前記バッテリの充電量を算出する充電量算出手段と、
前記バッテリの充電量に基づき目標発電電力を算出する目標発電電力算出手段と、
前記目標発電電力の発電を行うためのエンジン回転トルクである要求発電トルクを算出する要求発電トルク算出手段と、
前記要求発電トルクの変化率の上限値を制限する制限手段と、を備え、
前記制限手段は、前記自動走行制御が実施されているときに、前記要求発電トルクの変化率の上限値を、前記通常走行制御が実施されているときの上限値よりも小さい値に制限することを特徴とする車両用走行制御装置。 An engine and a motor as drive sources for transmitting driving force to the drive wheels, a battery for supplying electric power to the motor, and a power generation means for generating electric power by converting engine rotation torque generated by driving the engine into electric energy; Charging means for charging the battery with the electric power generated by the power generation means, and maintaining a normal travel control for performing a travel control according to the driving operation of the driver and a target travel state in which the travel state of the host vehicle is set A vehicle travel control device that controls the travel of a hybrid vehicle capable of performing automatic travel control that automatically adjusts as follows:
Charge amount calculating means for calculating the charge amount of the battery;
Target generated power calculating means for calculating target generated power based on the charge amount of the battery;
Required power generation torque calculating means for calculating required power generation torque which is engine rotation torque for generating the target generated power; and
Limiting means for limiting the upper limit value of the rate of change of the required power generation torque,
The limiting means limits the upper limit value of the change rate of the required power generation torque to a value smaller than the upper limit value when the normal traveling control is performed when the automatic traveling control is performed. A vehicular travel control device.
前記ハイブリッド車両の制駆動力制御のための目標駆動トルクを算出する目標駆動トルク算出手段とを備え、 A target drive torque calculating means for calculating a target drive torque for braking / driving force control of the hybrid vehicle,
前記要求発電トルク算出手段は、前記制限手段で設定された前記要求発電トルクの変化率の上限値に基づき前記要求発電トルクベースを補正して前記要求発電トルクを算出し、 The required power generation torque calculating means calculates the required power generation torque by correcting the required power generation torque base based on an upper limit value of a change rate of the required power generation torque set by the limiting means,
前記要求発電トルクベース算出手段は、前記目標駆動トルクが予め設定したコースト判定用トルク以下となるコースト判定時において、前記要求発電トルクベースを0に設定することを特徴とする請求項1に記載の車両用走行制御装置。 The demand power generation torque base calculation unit sets the demand power generation torque base to 0 when coast determination is performed in which the target drive torque is equal to or less than a preset coast determination torque. Vehicle travel control device.
設定した目標発電電力の発電を前記発電手段で行うためのエンジン回転トルクである要求発電トルクを算出する要求発電トルク算出ステップと、
前記要求発電トルクの変化率の上限値を制限する制限ステップと、を含み、
前記制限ステップにおいては、前記自動走行制御が実施されているときに、前記要求発電トルクの変化率の上限値を、前記通常走行制御が実施されているときの上限値よりも小さい値に制限することを特徴とする車両用走行制御方法。 An engine and a motor as drive sources for transmitting driving force to the drive wheels, a battery for supplying electric power to the motor, and a power generation means for generating electric power by converting engine rotation torque generated by driving the engine into electric energy; Charging means for charging the battery with the electric power generated by the power generation means, and maintaining a normal travel control for performing a travel control according to the driving operation of the driver and a target travel state in which the travel state of the host vehicle is set A vehicle travel control method for controlling travel of a hybrid vehicle capable of performing automatic travel control that automatically adjusts as follows:
A required power generation torque calculating step of calculating a required power generation torque that is an engine rotation torque for generating the set target generated power by the power generation means;
A limiting step of limiting an upper limit value of the rate of change of the required power generation torque, and
In the limiting step, when the automatic traveling control is being performed, the upper limit value of the rate of change in the required power generation torque is limited to a value smaller than the upper limit value when the normal traveling control is being performed. A vehicle running control method characterized by the above.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010237089A JP5652118B2 (en) | 2010-10-22 | 2010-10-22 | Vehicle travel control device and vehicle travel control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010237089A JP5652118B2 (en) | 2010-10-22 | 2010-10-22 | Vehicle travel control device and vehicle travel control method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012086772A JP2012086772A (en) | 2012-05-10 |
| JP5652118B2 true JP5652118B2 (en) | 2015-01-14 |
Family
ID=46258856
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010237089A Active JP5652118B2 (en) | 2010-10-22 | 2010-10-22 | Vehicle travel control device and vehicle travel control method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5652118B2 (en) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014069785A (en) * | 2012-10-02 | 2014-04-21 | Hino Motors Ltd | Hybrid vehicle |
| JP6069104B2 (en) * | 2013-05-31 | 2017-01-25 | 富士重工業株式会社 | Control device and control device abnormality detection method |
| JP6459825B2 (en) * | 2015-07-24 | 2019-01-30 | トヨタ自動車株式会社 | Vehicle control device |
| JP6690712B2 (en) * | 2016-07-15 | 2020-04-28 | 日産自動車株式会社 | Torque control method and torque control device |
| JP6380489B2 (en) * | 2016-09-07 | 2018-08-29 | トヨタ自動車株式会社 | Vehicle travel control device |
| MX2020006159A (en) * | 2017-12-15 | 2020-08-13 | Nissan Motor | Regenerative braking control method and regenerative braking control device. |
| JP7108584B2 (en) * | 2019-08-14 | 2022-07-28 | 本田技研工業株式会社 | Vehicle control device and vehicle |
| JP7533437B2 (en) | 2021-12-22 | 2024-08-14 | トヨタ自動車株式会社 | Vehicle control device |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08237809A (en) * | 1995-02-28 | 1996-09-13 | Toyota Motor Corp | Torque control apparatus of internal combustion engine |
| JP3087884B2 (en) * | 1995-04-28 | 2000-09-11 | 本田技研工業株式会社 | Hybrid vehicle power generation control device |
| JP3451935B2 (en) * | 1998-06-03 | 2003-09-29 | 日産自動車株式会社 | Driving force control device for hybrid vehicle |
| JP2009006841A (en) * | 2007-06-28 | 2009-01-15 | Toyota Motor Corp | Control device for hybrid vehicle |
| JP4527138B2 (en) * | 2007-07-12 | 2010-08-18 | 本田技研工業株式会社 | Control device for hybrid vehicle |
-
2010
- 2010-10-22 JP JP2010237089A patent/JP5652118B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012086772A (en) | 2012-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5652118B2 (en) | Vehicle travel control device and vehicle travel control method | |
| US9637108B2 (en) | Vehicle driving-torque control device | |
| KR101485286B1 (en) | Control device for hybrid vehicle | |
| JP4325615B2 (en) | Engine stop control device for hybrid vehicle | |
| JP5644360B2 (en) | Vehicle travel control device and vehicle travel control method | |
| EP2639130B1 (en) | Hybrid vehicle control device | |
| CN102958771B (en) | The control method of vehicle and vehicle | |
| JP5659691B2 (en) | Control device for hybrid vehicle and control method for hybrid vehicle | |
| EP2065243A2 (en) | Control apparatus of a hybrid vehicle and method for controlling the same | |
| JP2007069787A (en) | Deceleration controller for hybrid vehicle | |
| JP2007223421A (en) | Controller of hybrid electric vehicle | |
| JP2007168565A (en) | Coast deceleration controller for vehicle | |
| JP2012086773A (en) | Traveling control device for vehicle | |
| JP2011020542A (en) | Electric vehicle control device | |
| JP5696503B2 (en) | Vehicle travel control device and vehicle travel control method | |
| JP5703689B2 (en) | Vehicle travel control device | |
| JP5691389B2 (en) | Control device for hybrid vehicle | |
| JP5918464B2 (en) | Control device for hybrid vehicle | |
| JP5614237B2 (en) | Vehicle travel control device | |
| US20140038772A1 (en) | Traction Control System For A Hybrid Vehicle | |
| JP5492048B2 (en) | Vehicle travel control device | |
| JP5742166B2 (en) | Vehicle travel control device | |
| JP2012086802A (en) | Control device of hybrid vehicle | |
| JP5278402B2 (en) | Control device for hybrid vehicle and control method for hybrid vehicle | |
| JP2012091696A (en) | Vehicle travel control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140729 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140730 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141021 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141103 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5652118 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |