JP5539999B2 - 心臓ポンプシステム - Google Patents
心臓ポンプシステム Download PDFInfo
- Publication number
- JP5539999B2 JP5539999B2 JP2011530986A JP2011530986A JP5539999B2 JP 5539999 B2 JP5539999 B2 JP 5539999B2 JP 2011530986 A JP2011530986 A JP 2011530986A JP 2011530986 A JP2011530986 A JP 2011530986A JP 5539999 B2 JP5539999 B2 JP 5539999B2
- Authority
- JP
- Japan
- Prior art keywords
- energy
- patient
- rotating body
- heart
- pump
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/40—Details relating to driving
- A61M60/403—Details relating to driving for non-positive displacement blood pumps
- A61M60/419—Details relating to driving for non-positive displacement blood pumps the force acting on the blood contacting member being permanent magnetic, e.g. from a rotating magnetic coupling between driving and driven magnets
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/10—Location thereof with respect to the patient's body
- A61M60/122—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body
- A61M60/126—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable via, into, inside, in line, branching on, or around a blood vessel
- A61M60/135—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable via, into, inside, in line, branching on, or around a blood vessel inside a blood vessel, e.g. using grafting
- A61M60/139—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable via, into, inside, in line, branching on, or around a blood vessel inside a blood vessel, e.g. using grafting inside the aorta, e.g. intra-aortic balloon pumps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/20—Type thereof
- A61M60/205—Non-positive displacement blood pumps
- A61M60/216—Non-positive displacement blood pumps including a rotating member acting on the blood, e.g. impeller
- A61M60/226—Non-positive displacement blood pumps including a rotating member acting on the blood, e.g. impeller the blood flow through the rotating member having mainly radial components
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/40—Details relating to driving
- A61M60/403—Details relating to driving for non-positive displacement blood pumps
- A61M60/422—Details relating to driving for non-positive displacement blood pumps the force acting on the blood contacting member being electromagnetic, e.g. using canned motor pumps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/50—Details relating to control
- A61M60/508—Electronic control means, e.g. for feedback regulation
- A61M60/515—Regulation using real-time patient data
- A61M60/531—Regulation using real-time patient data using blood pressure data, e.g. from blood pressure sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/80—Constructional details other than related to driving
- A61M60/855—Constructional details other than related to driving of implantable pumps or pumping devices
- A61M60/871—Energy supply devices; Converters therefor
- A61M60/873—Energy supply devices; Converters therefor specially adapted for wireless or transcutaneous energy transfer [TET], e.g. inductive charging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2230/00—Geometry of prostheses classified in groups A61F2/00 - A61F2/26 or A61F2/82 or A61F9/00 or A61F11/00 or subgroups thereof
- A61F2230/0002—Two-dimensional shapes, e.g. cross-sections
- A61F2230/0028—Shapes in the form of latin or greek characters
- A61F2230/005—Rosette-shaped, e.g. star-shaped
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/32—General characteristics of the apparatus with radio-opaque indicia
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/82—Internal energy supply devices
- A61M2205/8237—Charging means
- A61M2205/8243—Charging means by induction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/10—Location thereof with respect to the patient's body
- A61M60/122—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body
- A61M60/126—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable via, into, inside, in line, branching on, or around a blood vessel
- A61M60/148—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable via, into, inside, in line, branching on, or around a blood vessel in line with a blood vessel using resection or like techniques, e.g. permanent endovascular heart assist devices
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Cardiology (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mechanical Engineering (AREA)
- Hematology (AREA)
- Anesthesiology (AREA)
- Vascular Medicine (AREA)
- Transplantation (AREA)
- Computer Networks & Wireless Communication (AREA)
- Medical Informatics (AREA)
- External Artificial Organs (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Prostheses (AREA)
Description
図48では、記号Y1、Y2、Y3などは回路内の試験点を表す。図中のこれらの構成要素およびそれぞれの値はこの特定の実装形態で機能する値であり、これはもちろん、無数の可能な設計の解決策の1つにすぎない。
1.針または管状の器具を患者の身体の胸部内に挿入するステップと、
2.針または管状の器具を使用して胸部に気体を充填し、それによって胸腔を膨張させるステップと、
3.少なくとも2つの腹腔鏡トロカールを患者の体内に配置するステップと、
4.腹腔鏡トロカールの1つを通して胸部内にカメラを挿入するステップと、
5.腹腔鏡トロカールの1つを通して切開具を挿入し、所期の配置領域を切開するステップと、
6.胸部内の血流の任意の部分内に回転体を配置するステップと、
7.デバイスに動力供給するエネルギー源を接続するステップとを含む手術方法の流れ図を示す。
1.患者の皮膚を切るステップと、
2.胸腔を開くステップと、
3.患者の心臓もしくは大動脈内の血流の内側または肺動脈の内側で回転体を配置すべき配置領域を切開するステップと、
4.配置領域内に回転体を配置するステップと、
5.デバイスに動力供給するエネルギー源を接続するステップとを含む手術方法の流れ図を示す。
1.針または管状の器具を患者の身体の腹部内に挿入するステップと、
2.針または管状の器具を使用して腹部に気体を充填し、それによって腹腔を膨張させるステップと、
3.少なくとも2つの腹腔鏡トロカールを患者の体内に配置するステップと、
4.腹腔鏡トロカールの1つを通して腹部内にカメラを挿入するステップと、
5.腹腔鏡トロカールの1つを通して切開具を挿入し、所期の配置領域を切開するステップと、
6.腹部大動脈内の血流の任意の部分内に回転体を配置するステップと、
7.デバイスに動力供給するエネルギー源を接続するステップとを含む手術方法の流れ図を示す。
1.患者の皮膚を切るステップと、
2.腹腔を開くステップと、
3.患者の腹部大動脈の領域内で回転体を配置すべき配置領域を切開するステップと、
4.腹部大動脈内の血流内に回転体を配置するステップと、
5.デバイスに動力供給するエネルギー源を接続するステップとを含む手術方法の流れ図を示す。
1.針または管状の器具を患者の身体の胸部内に挿入するステップと、
2.針または管状の器具を使用して胸部に気体を充填し、それによって胸腔を膨張させるステップと、
3.少なくとも2つの腹腔鏡トロカールを患者の体内に配置するステップと、
4.腹腔鏡トロカールの1つを通して胸部内にカメラを挿入するステップと、
5.腹腔鏡トロカールの1つを通して少なくとも1つの切開具を挿入し、患者の血管システム内の所期の配置領域を切開するステップと、
6.患者の胸部内の血流の任意の部分内、心臓もしくは大動脈内の血管の血流の内側、または肺動脈の内側に回転体を配置するステップと、
7.患者の血管の血流の外側、心臓もしくは大動脈の外側、または肺動脈の外側の配置領域内に固定子を配置し、前記固定子を回転体の外側に配置し、回転体に無線エネルギーを供給して回転体の回転運動を引き起こすステップと、
8.固定子に動力供給するエネルギー源を接続するステップとを含む手術方法の流れ図を示す。
1.患者の皮膚を切るステップと、
2.腹腔を開くステップと、
3.患者の胸部内の血流の任意の部分内、心臓もしくは大動脈内の血管の血流の内側、または肺動脈の内側に回転体を配置するステップと、
4.患者の血管の血流の外側、心臓もしくは大動脈の外側、または肺動脈の外側の配置領域内に固定子を配置し、前記固定子を回転体の外側に配置し、回転体に無線エネルギーを供給して回転体の回転運動を引き起こすステップと、
5.固定子に動力供給するエネルギー源を接続するステップとを含む手術方法の流れ図を示す。
1.針または管状の器具を患者の身体の腹部内に挿入するステップと、
2.針または管状の器具を使用して腹部に気体を充填し、それによって腹腔を膨張させるステップと、
3.少なくとも2つの腹腔鏡トロカールを患者の体内に配置するステップと、
4.腹腔鏡トロカールの1つを通して腹部内にカメラを挿入するステップと、
5.腹腔鏡トロカールの1つを通して少なくとも1つの切開具を挿入し、患者の腹部大動脈の領域内の所期の配置領域を切開するステップと、
6.患者の腹部大動脈内の血流の内側に回転体を配置するステップと、
7.腹部大動脈の血流の外側の配置領域内に固定子を配置し、固定子を回転体の外側に配置し、回転体に無線エネルギーを供給して回転体の回転運動を引き起こすステップと、
8.固定子に動力供給するエネルギー源を接続するステップとを含む手術方法の流れ図を示す。
1.患者の皮膚を切るステップと、
2.腹腔を開くステップと、
3.患者の腹部大動脈内の血流の任意の部分内に回転体を配置するステップと、
4.腹部大動脈の血流の外側の配置領域内に固定子を配置し、固定子を回転体の外側に配置し、回転体に無線エネルギーを供給して回転体の回転運動を引き起こすステップと、
5.固定子に動力供給するエネルギー源を接続するステップとを含む手術方法の流れ図を示す。
1.管状の器具を患者の身体の大腿動脈内に挿入するステップと、
2.器具を使用して、大腿動脈を通して大動脈へ回転体を案内するステップと、
3.大動脈の内側で回転体を放出するステップと、
4.駆動ユニットが回転体と磁気的に接触するように、大動脈の外側に駆動ユニットを配置するステップとを含む手術方法の流れ図を示す。
1.管状の器具を患者の身体の大腿動脈内に挿入するステップと、
2.器具を使用して、大腿動脈を通して腹部大動脈へ回転体を案内するステップと、
3.腹部大動脈の内側で回転体を放出するステップと、
4.駆動ユニットが回転体と磁気的に接触するように、大動脈の外側に駆動ユニットを配置するステップとを含む手術方法の流れ図を示す。
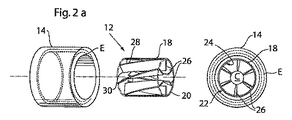
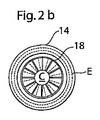
14 固定子; 18 回転体; 20 外壁; 22 外側表面;
24 内側表面; 26 ブレード; C 中心域。
Claims (1)
- ヒト患者の心臓を支援する心臓ポンプシステムであって、前記心臓ポンプシステムは第1のポンプ装置と第2のポンプ装置とから構成され、これら第1および第2のポンプ装置のそれぞれは中心軸部が無く且つ前記ヒトの血流内に配置される第1回転体と第2回転体を有すると共に、これら回転体はその長手方向線が出口から入口への血流方向と一致し、且つ前記各回転体の内部で放射状に延長するブレード群の一端が各回転体の内壁に取付けられ、その他端が各回転体の前記長手方向線から距離をあけて自由端として終端しており、同一の血流内に配置される前記第1の回転体と前記第2の回転体の回転方向は逆方向であり、これによって血流内の乱流を低減することを特徴とする心臓支援ポンプシステム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE0802161 | 2008-10-10 | ||
| SE0802161-0 | 2008-10-10 | ||
| US20238109P | 2009-02-24 | 2009-02-24 | |
| US61/202,381 | 2009-02-24 | ||
| PCT/SE2009/000445 WO2010042008A1 (en) | 2008-10-10 | 2009-10-12 | Heart help pump, system, and method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012505014A JP2012505014A (ja) | 2012-03-01 |
| JP2012505014A5 JP2012505014A5 (ja) | 2012-11-29 |
| JP5539999B2 true JP5539999B2 (ja) | 2014-07-02 |
Family
ID=42100790
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011530986A Active JP5539999B2 (ja) | 2008-10-10 | 2009-10-12 | 心臓ポンプシステム |
Country Status (10)
| Country | Link |
|---|---|
| US (3) | US9180235B2 (ja) |
| EP (3) | EP3906963A1 (ja) |
| JP (1) | JP5539999B2 (ja) |
| AU (1) | AU2009302931B2 (ja) |
| CA (3) | CA3049191C (ja) |
| CY (1) | CY1125034T1 (ja) |
| HU (1) | HUE055876T2 (ja) |
| PL (1) | PL2344218T3 (ja) |
| SI (1) | SI2344218T1 (ja) |
| WO (1) | WO2010042008A1 (ja) |
Families Citing this family (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6482145B1 (en) | 2000-02-14 | 2002-11-19 | Obtech Medical Ag | Hydraulic anal incontinence treatment |
| US6464628B1 (en) | 1999-08-12 | 2002-10-15 | Obtech Medical Ag | Mechanical anal incontinence |
| US6471635B1 (en) * | 2000-02-10 | 2002-10-29 | Obtech Medical Ag | Anal incontinence disease treatment with controlled wireless energy supply |
| WO2001047434A2 (en) | 2000-02-10 | 2001-07-05 | Potencia Medical Ag | Mechanical impotence treatment apparatus |
| DE60136910D1 (de) | 2000-02-11 | 2009-01-22 | Potentica Ag | Vorrichtung mit energieumwandlungsmitteln zur impotenzbehandlung |
| CA2397284C (en) | 2000-02-14 | 2010-05-18 | Potencia Medical Ag | Male impotence prosthesis apparatus with wireless energy supply |
| US7442165B2 (en) | 2000-02-14 | 2008-10-28 | Obtech Medical Ag | Penile prosthesis |
| WO2010042045A1 (en) | 2008-10-10 | 2010-04-15 | Milux Holding S.A. | A system, an apparatus, and a method for treating a sexual dysfunctional female patient |
| US8961448B2 (en) | 2008-01-28 | 2015-02-24 | Peter Forsell | Implantable drainage device |
| EP2240138B1 (en) | 2008-01-29 | 2021-07-21 | Implantica Patent Ltd. | Apparatus for treating obesity |
| SI2349383T1 (sl) * | 2008-10-10 | 2022-02-28 | Medicaltree Patent Ltd. | Naprava in sistem za pomoč srcu |
| EP2349170B1 (en) | 2008-10-10 | 2023-09-27 | Implantica Patent Ltd. | Apparatus for the treatment of female sexual dysfunction |
| WO2010042059A1 (en) * | 2008-10-10 | 2010-04-15 | Milux Holding S.A. | An improved artificial valve |
| US20110196484A1 (en) | 2008-10-10 | 2011-08-11 | Milux Holding Sa | Heart help method |
| US10668196B2 (en) * | 2008-10-10 | 2020-06-02 | Peter Forsell | Heart assisting device |
| WO2010042032A1 (en) | 2008-10-10 | 2010-04-15 | Milux Holding S.A. | Fastening means for implantable medcial control assembly |
| EP2349096B1 (en) | 2008-10-10 | 2021-01-27 | MedicalTree Patent Ltd. | An improved artificial valve |
| US8475355B2 (en) * | 2008-10-10 | 2013-07-02 | Milux Holding S.A. | Heart help device, system, and method |
| EP2344106B8 (en) | 2008-10-10 | 2022-07-20 | MedicalTree Patent Ltd. | Heart help device |
| US9180235B2 (en) * | 2008-10-10 | 2015-11-10 | Peter Forsell | Heart help pump, system and method |
| US9949812B2 (en) | 2009-07-17 | 2018-04-24 | Peter Forsell | Vaginal operation method for the treatment of anal incontinence in women |
| US10952836B2 (en) | 2009-07-17 | 2021-03-23 | Peter Forsell | Vaginal operation method for the treatment of urinary incontinence in women |
| TR201200951A2 (tr) * | 2012-03-29 | 2012-09-21 | Oran B�Lent | Büyük arterlere yerleştirilen kalp destek cihazı. |
| US20130138205A1 (en) | 2011-11-28 | 2013-05-30 | MI-VAD, Inc. | Ventricular assist device and method |
| US11621583B2 (en) | 2012-05-21 | 2023-04-04 | University Of Washington | Distributed control adaptive wireless power transfer system |
| US8827889B2 (en) * | 2012-05-21 | 2014-09-09 | University Of Washington Through Its Center For Commercialization | Method and system for powering implantable devices |
| TR201207222A2 (tr) | 2012-06-21 | 2012-11-21 | Oran B�Lent | Damar içi kalp destek cihazı. |
| AU2014306398B2 (en) * | 2013-08-16 | 2019-01-31 | Cardiobionic Pty Ltd | Heart assist system and/or device |
| US9314559B2 (en) * | 2013-08-30 | 2016-04-19 | Steve Smith | Four chamber redundant-impeller artificial heart |
| CN103446634B (zh) * | 2013-09-09 | 2015-07-29 | 北京工业大学 | 一种人工心脏自平衡体外磁驱动系统 |
| AU2015223169B2 (en) | 2014-02-25 | 2019-08-29 | Zain KHALPEY | Ventricular assist device and method |
| US10729834B2 (en) | 2014-12-19 | 2020-08-04 | Yale University | Heart failure recovery device and method of treatment |
| US20170258593A1 (en) * | 2016-03-09 | 2017-09-14 | David Good | Cardiac assistance device |
| KR102023617B1 (ko) | 2016-03-22 | 2019-09-20 | 삼성전자주식회사 | 이식형 의료장치에 전력을 공급하는 방법 및 이를 이용하는 전력공급시스템 |
| EP3503940B1 (en) | 2016-08-26 | 2020-11-25 | Tc1 Llc | Prosthetic rib with integrated percutaneous connector for ventricular assist devices |
| US10894114B2 (en) | 2017-01-12 | 2021-01-19 | Tc1 Llc | Driveline bone anchors and methods of use |
| WO2018226991A1 (en) | 2017-06-07 | 2018-12-13 | Shifamed Holdings, Llc | Intravascular fluid movement devices, systems, and methods of use |
| FR3071283B1 (fr) * | 2017-09-21 | 2022-07-29 | Fineheart | Pompe cardiaque equipee d'une turbine a pales internes |
| US11511103B2 (en) | 2017-11-13 | 2022-11-29 | Shifamed Holdings, Llc | Intravascular fluid movement devices, systems, and methods of use |
| DE102018201030A1 (de) | 2018-01-24 | 2019-07-25 | Kardion Gmbh | Magnetkuppelelement mit magnetischer Lagerungsfunktion |
| US10722631B2 (en) | 2018-02-01 | 2020-07-28 | Shifamed Holdings, Llc | Intravascular blood pumps and methods of use and manufacture |
| EP3806923A4 (en) * | 2018-06-13 | 2022-04-20 | Yale University | INTRACARDIAC DEVICE |
| DE102018211327A1 (de) | 2018-07-10 | 2020-01-16 | Kardion Gmbh | Laufrad für ein implantierbares, vaskuläres Unterstützungssystem |
| US10716511B2 (en) | 2018-07-31 | 2020-07-21 | Manicka Institute Llc | Subcutaneous device for monitoring and/or providing therapies |
| US11717674B2 (en) | 2018-07-31 | 2023-08-08 | Manicka Institute Llc | Subcutaneous device for use with remote device |
| US11433233B2 (en) | 2020-11-25 | 2022-09-06 | Calyan Technologies, Inc. | Electrode contact for a subcutaneous device |
| US10576291B2 (en) | 2018-07-31 | 2020-03-03 | Manicka Institute Llc | Subcutaneous device |
| US11179571B2 (en) | 2018-07-31 | 2021-11-23 | Manicka Institute Llc | Subcutaneous device for monitoring and/or providing therapies |
| US11660444B2 (en) | 2018-07-31 | 2023-05-30 | Manicka Institute Llc | Resilient body component contact for a subcutaneous device |
| JP2022524774A (ja) * | 2019-03-08 | 2022-05-10 | サマコア, インコーポレイテッド | 容積形シャトルポンプ心臓およびvad |
| JP2022540616A (ja) | 2019-07-12 | 2022-09-16 | シファメド・ホールディングス・エルエルシー | 血管内血液ポンプならびに製造および使用の方法 |
| US11654275B2 (en) | 2019-07-22 | 2023-05-23 | Shifamed Holdings, Llc | Intravascular blood pumps with struts and methods of use and manufacture |
| US20220378303A1 (en) * | 2019-09-25 | 2022-12-01 | Bionet Sonar | System and methods for using ultrasonic waves for wireless powering and communication of a cardiac assist device |
| WO2021062265A1 (en) | 2019-09-25 | 2021-04-01 | Shifamed Holdings, Llc | Intravascular blood pump systems and methods of use and control thereof |
| US11839708B2 (en) | 2019-10-19 | 2023-12-12 | SummaCor, Inc. | Linear cardiac assist pulsatile pump |
| DE102020102474A1 (de) | 2020-01-31 | 2021-08-05 | Kardion Gmbh | Pumpe zum Fördern eines Fluids und Verfahren zum Herstellen einer Pumpe |
| US10987060B1 (en) | 2020-09-14 | 2021-04-27 | Calyan Technologies, Inc. | Clip design for a subcutaneous device |
| CN116350933A (zh) * | 2022-01-26 | 2023-06-30 | 苏州心擎医疗技术有限公司 | 用于对心脏在发生功能衰竭时进行辅助的装置 |
Family Cites Families (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2500400A (en) * | 1946-10-25 | 1950-03-14 | Byron A Cogswell | Axial flow pump |
| GB885674A (en) | 1959-07-20 | 1961-12-28 | Interscience Res Corp | Improvements in or relating to mechanical hearts |
| US4304225A (en) * | 1979-04-30 | 1981-12-08 | Lloyd And Associates | Control system for body organs |
| EP0060569B1 (en) * | 1981-03-18 | 1990-12-19 | Günther Walter Otto Bramm | Magnetically suspended and rotated impellor pump apparatus |
| US4688998A (en) * | 1981-03-18 | 1987-08-25 | Olsen Don B | Magnetically suspended and rotated impellor pump apparatus and method |
| US4625712A (en) * | 1983-09-28 | 1986-12-02 | Nimbus, Inc. | High-capacity intravascular blood pump utilizing percutaneous access |
| US4779614A (en) * | 1987-04-09 | 1988-10-25 | Nimbus Medical, Inc. | Magnetically suspended rotor axial flow blood pump |
| US4995857A (en) * | 1989-04-07 | 1991-02-26 | Arnold John R | Left ventricular assist device and method for temporary and permanent procedures |
| US5112202A (en) | 1990-01-31 | 1992-05-12 | Ntn Corporation | Turbo pump with magnetically supported impeller |
| US5211546A (en) * | 1990-05-29 | 1993-05-18 | Nu-Tech Industries, Inc. | Axial flow blood pump with hydrodynamically suspended rotor |
| US5112200A (en) * | 1990-05-29 | 1992-05-12 | Nu-Tech Industries, Inc. | Hydrodynamically suspended rotor axial flow blood pump |
| WO1992008500A1 (en) * | 1990-11-09 | 1992-05-29 | Mcgill University | Cardiac assist method and apparatus |
| US5290227A (en) * | 1992-08-06 | 1994-03-01 | Pasque Michael K | Method of implanting blood pump in ascending aorta or main pulmonary artery |
| US6302661B1 (en) * | 1996-05-03 | 2001-10-16 | Pratap S. Khanwilkar | Electromagnetically suspended and rotated centrifugal pumping apparatus and method |
| US5851174A (en) * | 1996-09-17 | 1998-12-22 | Robert Jarvik | Cardiac support device |
| EP2058017A3 (en) * | 1996-10-04 | 2011-02-23 | Tyco Healthcare Group LP | Circulatory support system |
| US5964694A (en) * | 1997-04-02 | 1999-10-12 | Guidant Corporation | Method and apparatus for cardiac blood flow assistance |
| US5951262A (en) * | 1997-04-18 | 1999-09-14 | Centriflow Llc | Mechanism for providing motive force and for pumping applications |
| US6547821B1 (en) * | 1998-07-16 | 2003-04-15 | Cardiothoracic Systems, Inc. | Surgical procedures and devices for increasing cardiac output of the heart |
| US6149683A (en) * | 1998-10-05 | 2000-11-21 | Kriton Medical, Inc. | Power system for an implantable heart pump |
| US6428747B1 (en) * | 1998-12-30 | 2002-08-06 | Cardiovention, Inc. | Integrated extracorporeal blood oxygenator, pump and heat exchanger system |
| US6454999B1 (en) * | 1998-12-30 | 2002-09-24 | Cardiovention, Inc. | Integrated blood pump and oxygenator system having extended blood flow path |
| DE60037435T2 (de) * | 1999-08-12 | 2008-12-04 | Potencia Medical Ag | Medizinisches implantat mit drahtloser energieübertragung |
| JP2001207988A (ja) * | 2000-01-26 | 2001-08-03 | Nipro Corp | 磁気駆動型軸流ポンプ |
| US6623507B2 (en) * | 2001-05-07 | 2003-09-23 | Fathy M.A. Saleh | Vascular filtration device |
| US7998190B2 (en) * | 2002-06-17 | 2011-08-16 | California Institute Of Technology | Intravascular miniature stent pump |
| JP2004278375A (ja) * | 2003-03-14 | 2004-10-07 | Yasuhiro Fukui | 軸流ポンプ |
| CA2428741A1 (en) * | 2003-05-13 | 2004-11-13 | Cardianove Inc. | Dual inlet mixed-flow blood pump |
| US8419609B2 (en) * | 2005-10-05 | 2013-04-16 | Heartware Inc. | Impeller for a rotary ventricular assist device |
| US7544160B2 (en) * | 2005-02-10 | 2009-06-09 | Yossi Gross | Extracardiac blood flow amplification device |
| EP1893075A4 (en) * | 2005-06-08 | 2013-06-19 | Micromed Technology Inc | ARTIFICIAL HEART SYSTEM |
| EP1738783A1 (de) * | 2005-07-01 | 2007-01-03 | Universitätsspital Basel | Axialpumpe mit spiralförmiger Schaufel |
| US20130209292A1 (en) * | 2005-07-01 | 2013-08-15 | Doan Baykut | Axial flow blood pump with hollow rotor |
| AU2006297779B8 (en) * | 2005-10-05 | 2013-03-21 | Heartware, Inc. | Axial flow pump with multi-grooved rotor |
| EP2041438A2 (en) * | 2006-07-06 | 2009-04-01 | The Board of Regents of The University of Texas System | Positive displacement pump system and method |
| JP5518477B2 (ja) * | 2006-08-31 | 2014-06-11 | スマーティン テクノロジーズ、エルエルシー | モジュール式磁気機械的デバイス |
| US20090112312A1 (en) * | 2007-02-26 | 2009-04-30 | Larose Jeffrey A | Intravascular ventricular assist device |
| US8075472B2 (en) * | 2007-05-03 | 2011-12-13 | Leviticus-Cardio Ltd. | Permanent ventricular assist device for treating heart failure |
| GB0713864D0 (en) * | 2007-07-17 | 2007-08-29 | Sheppard & Charnley Ltd | Electric motor/generator assembly |
| US7794384B2 (en) * | 2007-12-07 | 2010-09-14 | Terumo Heart, Inc. | Dual communication interface for artificial heart system |
| SI2349383T1 (sl) | 2008-10-10 | 2022-02-28 | Medicaltree Patent Ltd. | Naprava in sistem za pomoč srcu |
| US8475355B2 (en) | 2008-10-10 | 2013-07-02 | Milux Holding S.A. | Heart help device, system, and method |
| US20110196484A1 (en) | 2008-10-10 | 2011-08-11 | Milux Holding Sa | Heart help method |
| US10668196B2 (en) | 2008-10-10 | 2020-06-02 | Peter Forsell | Heart assisting device |
| US9180235B2 (en) * | 2008-10-10 | 2015-11-10 | Peter Forsell | Heart help pump, system and method |
| US8386040B2 (en) * | 2009-04-16 | 2013-02-26 | The Board Of Regents Of The University Of Texas Systems | System and method for pump variable stroke |
| EP2298373A1 (de) * | 2009-09-22 | 2011-03-23 | ECP Entwicklungsgesellschaft mbH | Fluidpumpe mit wenigstens einem Schaufelblatt und einer Stützeinrichtung |
| US9662431B2 (en) * | 2010-02-17 | 2017-05-30 | Flow Forward Medical, Inc. | Blood pump systems and methods |
| US9555174B2 (en) * | 2010-02-17 | 2017-01-31 | Flow Forward Medical, Inc. | Blood pump systems and methods |
| CN103957957B (zh) * | 2011-08-17 | 2017-08-15 | 弗洛福沃德医药股份有限公司 | 血液泵系统 |
| US8849398B2 (en) * | 2011-08-29 | 2014-09-30 | Minnetronix, Inc. | Expandable blood pump for cardiac support |
| US10294944B2 (en) * | 2013-03-08 | 2019-05-21 | Everheart Systems Inc. | Flow thru mechanical blood pump bearings |
| WO2017004175A1 (en) * | 2015-06-29 | 2017-01-05 | Thoratec Corporation | Ventricular assist devices having a hollow rotor and methods of use |
-
2009
- 2009-10-12 US US13/123,231 patent/US9180235B2/en active Active
- 2009-10-12 CA CA3049191A patent/CA3049191C/en active Active
- 2009-10-12 SI SI200932133T patent/SI2344218T1/sl unknown
- 2009-10-12 HU HUE09819462A patent/HUE055876T2/hu unknown
- 2009-10-12 CA CA3126252A patent/CA3126252A1/en active Pending
- 2009-10-12 EP EP21164363.0A patent/EP3906963A1/en active Pending
- 2009-10-12 CA CA2776421A patent/CA2776421C/en active Active
- 2009-10-12 WO PCT/SE2009/000445 patent/WO2010042008A1/en active Application Filing
- 2009-10-12 PL PL09819462T patent/PL2344218T3/pl unknown
- 2009-10-12 EP EP21206386.1A patent/EP4082601A1/en active Pending
- 2009-10-12 JP JP2011530986A patent/JP5539999B2/ja active Active
- 2009-10-12 EP EP09819462.4A patent/EP2344218B1/en active Active
- 2009-10-12 AU AU2009302931A patent/AU2009302931B2/en active Active
-
2015
- 2015-11-06 US US14/934,227 patent/US11376416B2/en active Active
-
2021
- 2021-07-05 CY CY20211100599T patent/CY1125034T1/el unknown
-
2022
- 2022-07-01 US US17/855,844 patent/US20220401719A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010042008A1 (en) | 2010-04-15 |
| US20160129169A1 (en) | 2016-05-12 |
| US11376416B2 (en) | 2022-07-05 |
| SI2344218T1 (sl) | 2021-09-30 |
| CY1125034T1 (el) | 2023-03-24 |
| CA2776421C (en) | 2020-06-02 |
| EP4082601A1 (en) | 2022-11-02 |
| CA3126252A1 (en) | 2010-04-15 |
| EP3906963A1 (en) | 2021-11-10 |
| EP2344218A4 (en) | 2016-11-23 |
| US20110201870A1 (en) | 2011-08-18 |
| EP2344218B1 (en) | 2021-04-07 |
| CA3049191C (en) | 2023-08-29 |
| EP2344218A1 (en) | 2011-07-20 |
| JP2012505014A (ja) | 2012-03-01 |
| US9180235B2 (en) | 2015-11-10 |
| PL2344218T3 (pl) | 2022-01-10 |
| US20220401719A1 (en) | 2022-12-22 |
| CA2776421A1 (en) | 2010-04-15 |
| AU2009302931B2 (en) | 2015-10-29 |
| CA3049191A1 (en) | 2010-04-15 |
| HUE055876T2 (hu) | 2021-12-28 |
| AU2009302931A1 (en) | 2010-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5539999B2 (ja) | 心臓ポンプシステム | |
| JP6674491B2 (ja) | 心臓支援デバイスおよびシステム | |
| US20220313434A1 (en) | Artificial Valve | |
| JP7454009B2 (ja) | 哺乳類患者の尿閉を治療するシステム | |
| JP5385292B2 (ja) | 動脈瘤を処置するデバイス | |
| US9402718B2 (en) | Artificial valve | |
| JP2011500135A (ja) | 外部からの排尿制御のための移植可能なデバイス | |
| ES2879394T3 (es) | Bomba de ayuda al corazón, sistema y método | |
| WO2009048397A1 (en) | Method for assisting flow in a heart | |
| JP2020089762A (ja) | 心臓支援デバイスおよびシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121012 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121012 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131008 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140108 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5539999 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140501 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |