JP5538203B2 - Power fluctuation detection device and power fluctuation detection method - Google Patents
Power fluctuation detection device and power fluctuation detection method Download PDFInfo
- Publication number
- JP5538203B2 JP5538203B2 JP2010291101A JP2010291101A JP5538203B2 JP 5538203 B2 JP5538203 B2 JP 5538203B2 JP 2010291101 A JP2010291101 A JP 2010291101A JP 2010291101 A JP2010291101 A JP 2010291101A JP 5538203 B2 JP5538203 B2 JP 5538203B2
- Authority
- JP
- Japan
- Prior art keywords
- gauge
- amplitude
- voltage
- effective value
- vibration frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Emergency Protection Circuit Devices (AREA)
- Supply And Distribution Of Alternating Current (AREA)
- Measurement Of Current Or Voltage (AREA)
Description
本発明は、電力系統の動揺を検出する電力動揺検出装置および電力動揺検出方法に関する。 The present invention relates to a power fluctuation detection device and a power fluctuation detection method for detecting fluctuations in a power system.
電力系統においては、送電線の有効電力、発電機の位相角、変電所の電圧実効値、変電所・発電所での実周波数など様々なパラメータが存在する。電力系統を安定運用するためには、これらのパラメータを常時一定の範囲内に維持することが求められる。 In an electric power system, there are various parameters such as the effective power of a transmission line, the phase angle of a generator, the effective voltage value of a substation, and the actual frequency at the substation / power plant. In order to operate the power system stably, it is required to always maintain these parameters within a certain range.
従来、電力動揺波形の変化率の符号変化、電力動揺波形のボトムを検出して記憶した後に電力波形の変化率が正から負へ変化した時、電力動揺波形のピークであると認定し、逆に、電力動揺波形のピークを検出して記憶した後に電力波形の変化率が負から正へ変化した時、電力動揺波形のボトムであると認定することにより、複雑な波形を含む電力動揺に対して正しく応動し得る電力動揺検出装置の開示がなされている(例えば、特許文献1)。 Conventionally, when the rate of change of the power waveform changes from positive to negative after detecting and storing the sign change of the rate of change of the power oscillation waveform and the bottom of the power oscillation waveform, it is recognized as the peak of the power oscillation waveform and vice versa. When the rate of change of the power waveform changes from negative to positive after detecting and storing the peak of the power oscillation waveform, it is recognized that it is the bottom of the power oscillation waveform. Thus, there has been disclosed a power fluctuation detection device that can respond correctly (for example, Patent Document 1).
なお、下記特許文献2,3は、本願発明者による先願発明であり、この発明については後述する。
The following
しかしながら、上記特許文献1に示される手法では、電力波形の変化率の正負を判定している。このことは、裏を返せば、短時間の処理では電力系統の動揺を精度よく検出することができないことも意味している。すなわち、特許文献1の電力動揺検出装置では、電力系統の動揺を高速かつ高精度に検出することができないという課題があった。
However, the technique disclosed in
本発明は、上記に鑑みてなされたものであって、電力系統の動揺を高速かつ高精度に検出することができる電力動揺検出装置および電力動揺検出方法を提供することを目的とする。 The present invention has been made in view of the above, and an object of the present invention is to provide a power fluctuation detection device and a power fluctuation detection method capable of detecting a fluctuation of a power system at high speed and with high accuracy.
上述した課題を解決し、目的を達成するために、本発明は、電力系統にて測定される交流電気量の実効値に基づいて電力系統の動揺を検出する電力動揺検出装置であって、前記交流電気量の実効値を当該実効値における主振動周波数の2倍以上のサンプリング周波数でサンプリングした連続する少なくとも3点の瞬時値データの積分演算により求めた振幅値の正規化値であるゲージ振幅を算出するゲージ振幅算出部と、前記サンプリング周波数でサンプリングされ、前記ゲージ振幅を算出する際に用いた3点の瞬時値データを含む連続する少なくとも4点の瞬時値データにおける隣接する2点の瞬時値データ間の先端間距離を表す3点の差分瞬時値データの積分演算により求めた値の正規化値であるゲージ差分振幅を算出するゲージ差分振幅算出部と、前記ゲージ振幅および前記ゲージ差分振幅を用いてサンプリング1周期時間における回転位相角を算出する回転位相角算出部と、前記回転位相角および前記サンプリング周波数を用いて前記主振動周波数を算出する振動周波数算出部と、前記ゲージ振幅の時系列データに回帰分析手法を適用し、当該ゲージ振幅の主振動周波数に対応する減衰係数を算出する減衰係数算出部と、前記ゲージ振幅およびゲージ差分振幅を用いて算出した所定時間後におけるゲージ振幅およびゲージ差分振幅の各予測値に基づいて前記電力系統の動揺が発散傾向にあるか否かを判定する動揺判定部と、を備えたことを特徴とする。 In order to solve the above-described problems and achieve the object, the present invention provides a power fluctuation detection device that detects a fluctuation of an electric power system based on an effective value of an AC electric quantity measured in the electric power system, The gauge amplitude, which is a normalized value of the amplitude value obtained by integrating the instantaneous value data of at least three consecutive points obtained by sampling the effective value of the AC electric quantity at a sampling frequency that is at least twice the main vibration frequency at the effective value, Gauge amplitude calculation unit to calculate, and two adjacent instantaneous values in at least four consecutive instantaneous value data including three instantaneous value data sampled at the sampling frequency and used for calculating the gauge amplitude Gauge differential amplitude that calculates the gauge differential amplitude, which is the normalized value of the value obtained by integrating the differential instantaneous value data of the three points representing the tip-to-tip distance between the data A rotation phase angle calculation unit that calculates a rotation phase angle in one sampling period using the gauge amplitude and the gauge differential amplitude, and calculates the main vibration frequency using the rotation phase angle and the sampling frequency. A vibration frequency calculating unit that applies a regression analysis method to the time series data of the gauge amplitude, calculates a damping coefficient corresponding to the main vibration frequency of the gauge amplitude, and the gauge amplitude and the gauge differential amplitude. A fluctuation determination unit that determines whether or not the fluctuation of the power system tends to diverge based on the predicted values of the gauge amplitude and the gauge differential amplitude after a predetermined time calculated using To do.
この発明によれば、電力系統の動揺を高速かつ高精度に検出する電力動揺検出装置および電力動揺検出方法を提供できるという効果を奏する。 According to the present invention, there is an effect that it is possible to provide a power fluctuation detection device and a power fluctuation detection method for detecting fluctuations of a power system at high speed and with high accuracy.
以下に添付図面を参照し、本発明の実施の形態に係る電力動揺検出装置および電力動揺検出方法について説明する。なお、以下に示す実施の形態により本発明が限定されるものではない。 Hereinafter, a power fluctuation detection apparatus and a power fluctuation detection method according to embodiments of the present invention will be described with reference to the accompanying drawings. In addition, this invention is not limited by embodiment shown below.
(用語の意味)
本実施の形態に係る電力動揺検出装置および電力動揺検出方法を説明するにあたり、まず、本願明細書で使用する用語について説明する。
(Meaning of terms)
In describing the power fluctuation detection apparatus and the power fluctuation detection method according to the present embodiment, first, terms used in this specification will be described.
・系統周波数:基本的には、電力系統における定格周波数を意味し、50Hz、60Hzの2種類がある。なお、現実の系統周波数は、電力系統が安定であっても、定格周波数の近傍で微妙に変化している。
・スパイラルベクトル:複素平面上において、反時計周りに回転しながら減少あるいは拡大していく回転ベクトルである。なお、本願発明では、スパイラルベクトルの振動周波数と減衰係数とを別々に測定することで、スパイラルベクトルの実測を可能としている。
・円ベクトル:減衰係数がゼロである場合、スパイラルベクトルは円ベクトルとなる。なお、スパイラルベクトルが円ベクトルで表されている状態は、定常交流状態に当たる。
・円ベクトル対称性:円ベクトルの対称群が完全な対称性を有しているという性質を指して言う。なお、本願発明では、一定の時間範囲内においては、ベクトル振幅の大きさが一定であることを想定し、円ベクトル対称性を利用して系統周波数を求めることを提案する。
・スパイラルベクトル対称性:スパイラルベクトルの対称群が一定の対称性を有しているという性質を指して言う。なお、本願発明では、一定の時間範囲内においては、測定対象の振幅の大きさが少しだけ変化することを想定し、スパイラルベクトル対称性を利用して動揺の振動周波数を求めることを提案する。
・振動周波数:電力系統の電力、位相角、電圧実効値、電流実効値、系統周波数などの交流電気量における変化率(振動)の程度を表す量(「振動頻度」、「変動周波数」などと言い換えてもよい)である。すなわち、この振動周波数は、系統周波数とは異なる概念であることに注意が必要である。なお、この振動周波数は、系統特性に応じて変化する。例えば、電力系統が不安定にならない場合でも、振動周波数は、数Hz(例えば0.5〜4Hz)の範囲で変化し得ると言われている。
・ゲージ電圧群:時系列的に連続した3つの電圧回転ベクトルにより構成される対称群である。なお、電圧以外の電流、電力(有効電力、無効電力)についても同様な対称群の概念が定義可能である。
・ゲージ電圧:ゲージ電圧群により計算される電圧不変量である。
・ゲージ差分電圧群:時系列的に連続した3つの差分電圧回転ベクトルにより構成される対称群である。
・ゲージ差分電圧:ゲージ差分電圧群により計算される差分電圧不変量である。
System frequency: Basically, it means the rated frequency in the power system, and there are two types, 50 Hz and 60 Hz. It should be noted that the actual system frequency slightly changes in the vicinity of the rated frequency even when the power system is stable.
Spiral vector: A rotation vector that decreases or expands while rotating counterclockwise on the complex plane. In the present invention, the spiral vector can be actually measured by separately measuring the vibration frequency and the damping coefficient of the spiral vector.
Circle vector: When the damping coefficient is zero, the spiral vector is a circle vector. Note that the state in which the spiral vector is represented by a circle vector corresponds to a steady AC state.
-Circle vector symmetry: Refers to the property that the symmetry group of a circle vector has complete symmetry. In the present invention, it is proposed that the system frequency is obtained by utilizing the circular vector symmetry assuming that the magnitude of the vector amplitude is constant within a certain time range.
Spiral vector symmetry: Refers to the property that the symmetry group of spiral vectors has a certain symmetry. It is to be noted that the present invention proposes to obtain the oscillation frequency of the oscillating vibration using the spiral vector symmetry, assuming that the magnitude of the amplitude of the measurement object slightly changes within a certain time range.
・ Vibration frequency: An amount that represents the rate of change (vibration) in AC electricity such as power, phase angle, voltage effective value, current effective value, system frequency, etc. ("vibration frequency", "fluctuating frequency", etc.) In other words). That is, it should be noted that this vibration frequency is a concept different from the system frequency. This vibration frequency changes according to the system characteristics. For example, even when the power system does not become unstable, it is said that the vibration frequency can change within a range of several Hz (for example, 0.5 to 4 Hz).
Gauge voltage group: a symmetric group composed of three voltage rotation vectors continuous in time series. The same symmetrical group concept can be defined for currents other than voltage and power (active power and reactive power).
Gauge voltage: A voltage invariant calculated by the gauge voltage group.
Gauge differential voltage group: A symmetric group composed of three differential voltage rotation vectors that are continuous in time series.
Gauge differential voltage: a differential voltage invariant calculated by a gauge differential voltage group.
なお、本願明細書では、電圧という交流電気量に基づくゲージ電圧/ゲージ差分電圧を一例とする計算式を説明するが、有効電力(ケージ有効電力/ケージ差分有効電力)、発電機位相角(ケージ発電機位相角/ケージ差分発電機位相角)、系統周波数(ケージ周波数/ケージ差分周波数)、母線間位相差(一の母線と他の母線との位相差)など様々な計算式に変換することができる。以下、これらの概念を総称する場合には、それぞれゲージ振幅およびゲージ差分振幅と称する。また、以下に説明する電力動揺検出装置における各構成部および、電力動揺検出処理手法における各ステップについても、ゲージ振幅またはゲージ差分振幅と読み替えるものとする。 In the specification of the present application, a calculation formula using an example of a gauge voltage / gauge differential voltage based on an AC electric quantity called a voltage will be described, but the active power (cage effective power / cage differential active power), generator phase angle (cage) Conversion to various calculation formulas such as generator phase angle / cage differential generator phase angle), system frequency (cage frequency / cage differential frequency), inter-bus phase difference (phase difference between one bus and another) Can do. Hereinafter, these concepts are collectively referred to as gauge amplitude and gauge differential amplitude, respectively. In addition, each component in the power fluctuation detection device described below and each step in the power fluctuation detection processing method are also read as gauge amplitude or gauge difference amplitude.
(実施の形態)
つぎに、本実施の形態の要旨を成す動揺検出手法の概念(アルゴリズム)について説明する。
(Embodiment)
Next, the concept (algorithm) of the motion detection technique forming the gist of the present embodiment will be described.
図1は、時間領域におけるスパイラルベクトル瞬時値を示す図である。図1に示すスパイラルベクトル瞬時値は、次式のように表すことができる。 FIG. 1 is a diagram showing spiral vector instantaneous values in the time domain. The spiral vector instantaneous value shown in FIG. 1 can be expressed as follows.
![]()
![]()
上記(1)式において、PSは初期の振幅値、λは減衰係数、ωは振動角周波数、fは振動周波数、φは初期位相である。 In the above equation (1), P S is an initial amplitude value, λ is an attenuation coefficient, ω is a vibration angular frequency, f is a vibration frequency, and φ is an initial phase.
図2は、複素平面上のスパイラルベクトルを示す図である。図2に示すスパイラルベクトルは、次式で表すことができる。 FIG. 2 is a diagram showing spiral vectors on the complex plane. The spiral vector shown in FIG. 2 can be expressed by the following equation.
![]()
![]()
また、スパイラルベクトルの実数部(Pre)および虚数部(Pim)は、次式のように表すことができる。 Further, the real part (P re ) and the imaginary part (P im ) of the spiral vector can be expressed as follows.

上記各式から理解できるように、スパイラルベクトルの減衰係数λと振動周波数fが測定できれば、スパイラルベクトルの動揺波形を確定することができる。特に、減衰係数λが零より大きい場合、動揺が発散していくことを判別でき、適切な系統制御を実行することができる。なお、系統制御としては、発電機遮断制御、系統分離制御などがあり、これらの制御を通じて電力系統の安定的な運用が維持可能となる。 As can be understood from the above equations, if the attenuation coefficient λ and the vibration frequency f of the spiral vector can be measured, the fluctuation waveform of the spiral vector can be determined. In particular, when the damping coefficient λ is greater than zero, it can be determined that the fluctuations diverge, and appropriate system control can be executed. The system control includes a generator shutoff control, a system separation control, and the like, and stable operation of the power system can be maintained through these controls.
ところで、実際の動揺波形には、複数の振動周波数とそれぞれ対応する複数の減衰係数が存在する。しかしながら、一定の時間幅以内において、選定したサンプリング周波数に対応する一つの主要な振動周波数(主振動周波数、以下単に「振動周波数」という)と、当該振動周波数に対応する減衰係数とで動揺波形を近似的に模擬することは可能である。ただし、検討対象に適するサンプリング周波数を選定することは重要な点である。例えば、送電線雷の進入電流の検討と電力系統の長周期電力動揺とでは振動周期が異なるので、それぞれのサンプリング周波数を適切に選定する必要がある。 By the way, an actual oscillation waveform has a plurality of damping coefficients respectively corresponding to a plurality of vibration frequencies. However, within a certain time width, a fluctuation waveform is generated with one main vibration frequency (main vibration frequency, hereinafter simply referred to as “vibration frequency”) corresponding to the selected sampling frequency and a damping coefficient corresponding to the vibration frequency. It is possible to simulate approximately. However, it is important to select a sampling frequency that is suitable for the subject of study. For example, since the oscillation period differs between the examination of the incoming current of a transmission line lightning and the long-period power fluctuation of the power system, it is necessary to appropriately select each sampling frequency.
つぎに、図3〜図5の各図面を参照して、スパイラルベクトルの減衰係数および振動周波数を求める手法を説明する。なお、上述したことではあるが、ここではゲージ電圧/ゲージ差分電圧を一例とする計算式について説明する。 Next, a method for obtaining the attenuation coefficient and vibration frequency of the spiral vector will be described with reference to FIGS. In addition, although it was mentioned above, the calculation formula which uses a gauge voltage / gauge differential voltage as an example is demonstrated here.
図3は、複素平面上のゲージ電圧群を説明する図である。図3において、複素平面上には、それぞれ現時点の電圧回転ベクトルv(t)、現時点よりもサンプリング1周期T(サンプリング周波数1刻み幅分に相当する時間)前時点の電圧回転ベクトルv(t−T)、現時点よりもサンプリング2周期(2T)前時点の電圧回転ベクトルv(t−2T)が示されている。なお、以下の説明において、v(t)は、電圧実効値の瞬時値(つまり、電圧実効値の時間変動を観測したときの値)である。また、括弧無しで表記する例えば“v”は、電圧実効値の瞬時値の実数部を表している。さらに、アルファベットの大文字で表記する例えば“V”は、電圧実効値の実効値もしくは振幅値(以下単に「電圧振幅」という)を表している。
FIG. 3 is a diagram for explaining a group of gauge voltages on the complex plane. In FIG. 3, on the complex plane, the current voltage rotation vector v (t) and the voltage rotation vector v (t−) at the time before the current sampling period T (a time corresponding to the
ここで、これら3つの電圧回転ベクトルについて考察する。まず、これら3つの電圧回転ベクトルは、同じ回転速度で複素平面上を反時計回りに回転する回転ベクトルであり、サンプリング周期Tを用いて、次式のように表される。 Now, consider these three voltage rotation vectors. First, these three voltage rotation vectors are rotation vectors that rotate counterclockwise on the complex plane at the same rotation speed, and are expressed as follows using the sampling period T.
上記(4)式において、Vは上述した電圧振幅である。また、ωは回転角速度(振動角周波数でもある)であり、次式で表される。 In the above equation (4), V is the voltage amplitude described above. Further, ω is a rotational angular velocity (also a vibration angular frequency) and is expressed by the following equation.
![]()
![]()
上記(5)式において、fは振動周波数である。また、(4)式におけるサンプリング1周期Tは、次式で表される。 In the above equation (5), f is the vibration frequency. Also, the sampling one period T in the equation (4) is expressed by the following equation.
上記(6)式において、fSはサンプリング周波数である。また、(4)式に示されるαは、サンプリング1周期Tの時間に電圧ベクトルが複素平面上を回転した角度を意味する回転位相角である。 In the above equation (6), f S is a sampling frequency. Further, α shown in the equation (4) is a rotation phase angle that means an angle at which the voltage vector is rotated on the complex plane in the time of one sampling period T.
図3において、両側の電圧ベクトル(v(t),v(t−2T))同士は、中間の電圧ベクトル(v(t−T))に対して近似的な対称性がある。なお、近似的とは、電圧ベクトルv(t)と電圧ベクトルv(t−2T)との間に振幅値の若干の差異が有る点を意味しているが、その差異はサンプリング時間に比して小さいため、対称性を考える上で問題とはならない。これらの3つの電圧回転ベクトルは、同じ回転速度で複素平面上を反時計回りに回転する一つの電圧回転ベクトル群を形成すると共に、後述するような正規化された一つの値(ゲージ電圧)が定義される。これらの性質により、これら3つの電圧回転ベクトルによるグループをゲージ電圧群と定義する。 In FIG. 3, the voltage vectors (v (t), v (t−2T)) on both sides have approximate symmetry with respect to the intermediate voltage vector (v (t−T)). Note that approximate means that there is a slight difference in the amplitude value between the voltage vector v (t) and the voltage vector v (t−2T). This is not a problem when considering symmetry. These three voltage rotation vectors form one voltage rotation vector group that rotates counterclockwise on the complex plane at the same rotation speed, and a normalized value (gauge voltage) as described later is obtained. Defined. Due to these properties, a group of these three voltage rotation vectors is defined as a gauge voltage group.
つぎに、ゲージ電圧群の振幅値(正規化された振幅値)であるゲージ電圧Vgの計算式について説明する。まず、ゲージ電圧Vgの計算式を次式のように定義する。 Next, a calculation formula of the gauge voltage V g which is an amplitude value (normalized amplitude value) of the gauge voltage group will be described. First, the equation for calculating the gauge voltage V g is defined as follows:
![]()
![]()
上記(7)式において、v2はゲージ電圧群における2番目の電圧回転ベクトルの実数部、v1はゲージ電圧群における1番目の電圧回転ベクトルの実数部、v3はゲージ電圧群における3番目の電圧回転ベクトルの実数部であり、それぞれ次式を用いて表される。 In the above equation (7), v 2 is the real part of the second voltage rotation vector in the gauge voltage group, v 1 is the real part of the first voltage rotation vector in the gauge voltage group, and v 3 is the third part in the gauge voltage group. The real part of the voltage rotation vector of
上記(8)式において、記号“Re”は複素ベクトル成分の実数部であることを示している。ここで、(8)式を(7)式の右辺に代入すれば、次式のように展開される。 In the above equation (8), the symbol “Re” indicates the real part of the complex vector component. Here, if the expression (8) is substituted into the right side of the expression (7), it is expanded as the following expression.
すなわち、ゲージ電圧Vgは、次式で表される。 That is, the gauge voltage V g is expressed by the following equation.
![]()
![]()
上記(10)式で表されるように、ゲージ電圧Vgは、電圧振幅Vの項と、回転位相角αの正弦関数の項と、直流減衰項との積で表される。なお、振動周波数fと回転位相角αとは1対1に対応するので、上記式変形により、振動周波数fと直流減衰項に含まれる減衰係数λとを分離することができている。 As represented by the above equation (10), the gauge voltage V g is represented by the product of the term of the voltage amplitude V, the term of the sine function of the rotational phase angle α, and the DC attenuation term. Since the vibration frequency f and the rotation phase angle α have a one-to-one correspondence, the vibration frequency f and the attenuation coefficient λ included in the DC attenuation term can be separated by the above-described equation modification.
図4は、複素平面上のゲージ差分電圧群を説明する図である。図4において、複素平面上には、それぞれ現時点の電圧回転ベクトルv(t)、現時点よりもサンプリング1周期T(サンプリング周波数1刻み幅分に相当する時間)前時点の電圧回転ベクトルv(t−T)、現時点よりもサンプリング2周期(2T)前時点の電圧回転ベクトルv(t−2T)、現時点よりもサンプリング3周期(3T)前時点の電圧回転ベクトルv(t−3T)が示されている。
FIG. 4 is a diagram for explaining a gauge differential voltage group on a complex plane. In FIG. 4, on the complex plane, the current voltage rotation vector v (t), and the voltage rotation vector v (t−) at the time before the current sampling period T (a time corresponding to the
また、図4において、v(t)とv(t−T)との電圧差分ベクトルであるv2(t)、v(t−T)とv(t−2T)との電圧差分ベクトルであるv2(t−T)、v(t−2T)とv(t−3T)との電圧差分ベクトルであるv2(t−2T)が示されている。これら3つの電圧差分ベクトルは、上述した3つの電圧回転ベクトルと同様に、電圧振幅V、回転角速度ω、回転位相角αを用いて、次式のように表される。 Further, in FIG. 4, v 2 (t), which is a voltage difference vector between v (t) and v (t−T), and a voltage difference vector between v (t−T) and v (t−2T). The voltage difference vector v 2 (t−2T) between v 2 (t−T), v (t−2T) and v (t−3T) is shown. These three voltage difference vectors are expressed by the following equation using the voltage amplitude V, the rotation angular velocity ω, and the rotation phase angle α, similarly to the three voltage rotation vectors described above.
ここで、図4を参照すると、3つの電圧差分ベクトルにおいて、両側の電圧差分ベクトル(v2(t),v2(t−2T))同士は、中間の電圧差分ベクトル(v2(t−T))に対して近似的な対称性がある。なお、近似的とは、電圧差分ベクトルv2(t)と電圧差分ベクトルv2(t−2T)との間に振幅値の若干の差異が有る点を意味しているが、その差異はサンプリング時間に比して小さいため、対称性を考える上で問題とはならない。また、これら3つの電圧差分ベクトルは、同じ回転速度で複素平面上を反時計回りに回転する一つの電圧差分ベクトル群を形成すると共に、後述するような正規化された一つの値(ゲージ差分電圧)が定義される。これらの性質により、これら3つの電圧差分ベクトルによるグループをゲージ差分電圧群と定義する。 Here, referring to FIG. 4, among the three voltage difference vectors, the voltage difference vectors (v 2 (t), v 2 (t−2T)) on both sides are equal to the intermediate voltage difference vector (v 2 (t− There is an approximate symmetry for T)). Note that approximate means that there is a slight difference in amplitude value between the voltage difference vector v 2 (t) and the voltage difference vector v 2 (t−2T). Since it is smaller than time, there is no problem in considering symmetry. These three voltage difference vectors form one voltage difference vector group that rotates counterclockwise on the complex plane at the same rotation speed, and one normalized value (gauge difference voltage as described later). ) Is defined. Due to these properties, a group of these three voltage difference vectors is defined as a gauge difference voltage group.
つぎに、ゲージ差分電圧群の振幅値(正規化された振幅値)であるゲージ差分電圧Vgdの計算式について説明する。まず、ゲージ差分電圧Vgdの計算式を次式のように定義する。 Next, a calculation formula of the gauge differential voltage V gd that is the amplitude value (normalized amplitude value) of the gauge differential voltage group will be described. First, the calculation formula of the gauge differential voltage V gd is defined as follows.
![]()
![]()
上記(12)式において、v22はゲージ差分電圧群における2番目の電圧差分ベクトルの実数部、v21はゲージ差分電圧群における1番目の電圧差分ベクトルの実数部、v23はゲージ差分電圧群における3番目の電圧差分ベクトルの実数部であり、それぞれ次式を用いて表される。 In the above equation (12), v 22 is the real part of the second voltage difference vector in the gauge difference voltage group, v 21 is the real part of the first voltage difference vector in the gauge difference voltage group, and v 23 is the gauge difference voltage group. Is the real part of the third voltage difference vector in FIG.
上記(13)式において、記号“Re”は複素ベクトル成分の実数部であることを示している。ここで、(13)式を(12)式の右辺における平方根記号中の式に代入すれば、次式のように展開される。 In the above equation (13), the symbol “Re” indicates the real part of the complex vector component. Here, if the equation (13) is substituted into the equation in the square root symbol on the right side of the equation (12), the following equation is developed.
なお、上式の展開では、次の近似式を利用している。 In the development of the above formula, the following approximate formula is used.
![]()
![]()
よって、(14)式を(12)式に代入することにより、ゲージ差分電圧Vgdは、次式で表すことができる。 Therefore, the gauge differential voltage V gd can be expressed by the following formula by substituting the formula (14) into the formula (12).
また、上記(10),(16)式により、次式の関係式が得られる。 Further, the following relational expression is obtained from the above expressions (10) and (16).
よって、回転位相角αは、ゲージ電圧Vgおよびゲージ差分電圧Vgdを用いて、次式のように表される。 Therefore, the rotation phase angle α is expressed by the following equation using the gauge voltage V g and the gauge differential voltage V gd .
なお、一般的に、サンプリング周波数の1周期Tは非常に小さいので(例えば、サンプリング周波数が1000Hzの場合、1周期Tは0.001秒である)、次式が成立すると考えてよい。 In general, since one period T of the sampling frequency is very small (for example, when the sampling frequency is 1000 Hz, one period T is 0.001 second), it may be considered that the following equation holds.
したがって、回転位相角αは、(18)式に(19)式の関係を代入することで得られる、次式を用いて計算することができる。 Therefore, the rotational phase angle α can be calculated using the following equation obtained by substituting the relationship of the equation (19) into the equation (18).
また、振動周波数fは、次式を用いて計算することができる。 The vibration frequency f can be calculated using the following equation.
さらに、振動角周波数ωは、次式を用いて計算することができる。 Furthermore, the vibration angular frequency ω can be calculated using the following equation.
![]()
![]()
また、(10)式により、電圧振幅Vを求める式は、ゲージ電圧Vgと回転位相角αを用いて、次式のように表すことができる。 Further, the equation for obtaining the voltage amplitude V by the equation (10) can be expressed as the following equation using the gauge voltage V g and the rotation phase angle α.
また、電圧振幅Vを求める式は、(16)式を用いて、次式のように表すこともできる。 Moreover, the equation for obtaining the voltage amplitude V can also be expressed as the following equation using equation (16).
ここで、(20)式により、回転位相半角(α/2)の正弦関数値および余弦関数値は、次式および次々式のように表すことができる。 Here, the sine function value and cosine function value of the rotational phase half angle (α / 2) can be expressed by the following equation and the following equation by the equation (20).
よって、上記(23)、(25)および(26)式により、電圧振幅Vは、次式を用いて計算することができる。 Therefore, the voltage amplitude V can be calculated using the following equation by the above equations (23), (25), and (26).
なお、ここまで、3つの電圧回転ベクトル(3サンプリング点)に基づくゲージ電圧群によって求められるゲージ電圧および、4つの電圧回転ベクトル(4サンプリング点)のうちの隣接する2つの電圧回転ベクトルによる3つの電圧差分ベクトルに基づくゲージ差分電圧群によって求められるゲージ差分電圧の各計算式を示してきたが、ゲージ電圧およびゲージ差分電圧を計算する上でこれらのサンプリング点に限定されるものではなく、サンプリング点数を増加させることも可能である。そこで、以下、サンプリング点数をn個とした場合の計算式を提示する。 Up to this point, the gauge voltage determined by the gauge voltage group based on the three voltage rotation vectors (3 sampling points) and the three voltage rotation vectors based on the two adjacent voltage rotation vectors among the four voltage rotation vectors (4 sampling points). Although each calculation formula of the gauge difference voltage obtained by the gauge difference voltage group based on the voltage difference vector has been shown, it is not limited to these sampling points in calculating the gauge voltage and the gauge difference voltage, but the number of sampling points It is also possible to increase. Therefore, hereinafter, a calculation formula when the number of sampling points is n is presented.
まず、サンプリング点数n個(nは3以上)の電圧回転ベクトルを利用する(n−2)個のゲージ電圧群によるゲージ電圧の計算式を示すと以下のとおりである。 First, the calculation formula of the gauge voltage by (n−2) gauge voltage groups using n sampling points (n is 3 or more) voltage rotation vectors is as follows.
すなわち、上記(28)式で表されるゲージ電圧は、交流電圧の実効値を当該実効値における振動周波数の2倍以上のサンプリング周波数でサンプリングした連続する少なくとも3点の実効値データの二乗積分演算により求めた値の正規化値である。 That is, the gauge voltage represented by the above equation (28) is a square integral calculation of effective value data of at least three consecutive points obtained by sampling the effective value of the AC voltage at a sampling frequency twice or more the vibration frequency in the effective value. This is a normalized value of the value obtained by.
同様に、サンプリング点数(n+1)個(nは3以上)の電圧回転ベクトルを利用する(n−2)個のゲージ差分電圧群によるゲージ差分電圧の計算式も以下のとおり一般化できる。 Similarly, the calculation formula of the gauge differential voltage by (n−2) gauge differential voltage groups using (n + 1) number of sampling points (n is 3 or more) voltage rotation vectors can be generalized as follows.
すなわち、上記(29)式で表されるゲージ差分電圧は、ゲージ電圧を算出する際に用いたサンプリング周波数でサンプリングされ、ゲージ電圧を算出する際に用いた3点の実効値データを含む連続する少なくとも4点の実効値データにおける隣接する2点の実効値データ間の先端間距離を表す3点の差分実効値データの二乗積分演算により求めた値の正規化値である。 That is, the gauge differential voltage represented by the above equation (29) is sampled at the sampling frequency used when calculating the gauge voltage, and is continuously included including the three-point effective value data used when calculating the gauge voltage. This is a normalized value of a value obtained by a square integral operation of differential effective value data of three points representing a distance between the tips of the effective value data of two adjacent points in at least four effective value data.
なお、複数の対称群(ゲージ電圧群およびゲージ差分電圧群)を利用して計算を行う場合、ノイズ対策に有効である。ただし、(10)式および(16)式からも分かるように、各対称群におけるゲージ電圧およびゲージ差分電圧の値は時間に応じて変化するので、特に、減衰係数が大きい場合には、対称群に含まれる電圧回転ベクトルの数を計算精度に影響の与えない範囲内で可能な限り小さくして振動周波数を求めることが望ましい。 In addition, when calculating using a plurality of symmetrical groups (gauge voltage group and gauge differential voltage group), it is effective for noise countermeasures. However, as can be seen from the equations (10) and (16), the values of the gauge voltage and the gauge differential voltage in each symmetric group change according to time. Therefore, particularly when the attenuation coefficient is large, the symmetric group. It is desirable to obtain the vibration frequency by reducing the number of voltage rotation vectors included in the range as much as possible within a range that does not affect the calculation accuracy.
なお、ゲージ差分電圧Vgdは、ゲージ電圧Vgに比して直流成分の影響を受けないので、(7)式よりも(12)式で求めた値の方が精度が高いと言える。 Since the gauge differential voltage V gd is not affected by the DC component as compared with the gauge voltage V g , it can be said that the value obtained by the equation (12) is more accurate than the equation (7).
つぎに、減衰係数λの推定手法について図5を参照して説明する。図5は、ゲージ電圧が一次近似できるときのゲージ電圧の推移を示す図である。 Next, a method for estimating the attenuation coefficient λ will be described with reference to FIG. FIG. 5 is a diagram showing the transition of the gauge voltage when the gauge voltage can be linearly approximated.
上述したことではあるが、サンプリング周波数の1周期Tは非常に小さいので(例えば、サンプリング周波数が1000Hzの場合、1周期Tは0.001秒である)、ゲージ電圧は、図5に示すように、リニアに変化すると考えて差し支えない。したがって、ゲージ電圧は、次式に示すような一次近似式で展開することができる。 As described above, since one period T of the sampling frequency is very small (for example, when the sampling frequency is 1000 Hz, one period T is 0.001 second), the gauge voltage is as shown in FIG. You can think of it as changing linearly. Therefore, the gauge voltage can be developed by a linear approximation formula as shown in the following formula.
![]()
![]()
上記(30)式をマトリックスで表せば、次式のように表せる。 If the above equation (30) is expressed in a matrix, it can be expressed as the following equation.
![]()
![]()
ここで、時系列ゲージ電圧がn点あるとすれば、ゲージ電圧マトリックス[Vg]は、次式のように表すことができる。 Here, if the time series gauge voltage has n points, the gauge voltage matrix [V g ] can be expressed as the following equation.
また、時間要素を表すマトリックス[A]および係数マトリックス[P]は、次式および、次々式のように表すことができる。 Further, the matrix [A] and the coefficient matrix [P] representing the time element can be represented by the following equations and the following equations.
(31)式に最小二乗法を適用すれば、係数マトリックス[P]は次式のように表すことができる。 If the least square method is applied to the equation (31), the coefficient matrix [P] can be expressed as the following equation.
一方、(30)式の第3式と第4式の係数比較により、次式の関係式が得られる。 On the other hand, the following relational expression is obtained by comparing the coefficients of the third and fourth expressions of the expression (30).
したがって、上記(35)式で求めた結果を上記(36)式に代入することにより、減衰係数λを求めることができる。 Therefore, the attenuation coefficient λ can be obtained by substituting the result obtained by the equation (35) into the equation (36).
また、減衰係数λは、ゲージ差分電圧に最小二乗法を適用することで求めてもよい。以下同様に、その手順を説明する。 The attenuation coefficient λ may be obtained by applying a least square method to the gauge differential voltage. Similarly, the procedure will be described below.
まず、ゲージ差分電圧は、次式に示すような一次近似式で展開することができる。 First, the gauge differential voltage can be developed by a linear approximation formula as shown in the following formula.
上記(37)式をマトリックスで表せば、次式のように表せる。 If the above expression (37) is expressed by a matrix, it can be expressed as the following expression.
![]()
![]()
ここで、時系列ゲージ差分電圧がn点あるとすれば、ゲージ差分電圧マトリックス[Vgd]は、次式のように表すことができる。 Here, if there are n time-series gauge differential voltages, the gauge differential voltage matrix [V gd ] can be expressed as the following equation.
また、時間要素を表すマトリックス[A]および係数マトリックス[Pd]は、次式および、次々式のように表すことができる。 Further, the matrix [A] and the coefficient matrix [P d ] representing the time element can be represented by the following equations and the following equations.
(38)式に最小二乗法を適用すれば、係数マトリックス[Pd]は次式のように表すことができる。 If the least square method is applied to the equation (38), the coefficient matrix [P d ] can be expressed as the following equation.
一方、(37)式の第3式と第4式の係数比較により、次式の関係式が得られる。 On the other hand, the following relational expression is obtained by comparing the coefficients of the third and fourth expressions of Expression (37).
したがって、上記(42)式で求めた結果を上記(43)式に代入することにより、減衰係数λを求めることができる。 Therefore, the attenuation coefficient λ can be obtained by substituting the result obtained by the equation (42) into the equation (43).
なお、上記の式展開において、回転位相角αは(20)式を用いて算出しているが、もし、計算時間に余裕がある場合、上記で求めた減衰係数λを(18)式に代入して計算し直せば、回転位相角αの推定精度が向上する。したがって、再計算した回転位相角αを用いて、振動周波数fを再計算(補正)すれば振動周波数fの推定精度も向上させることができる。 In the above equation expansion, the rotational phase angle α is calculated using the equation (20). However, if there is a margin in the calculation time, the attenuation coefficient λ obtained above is substituted into the equation (18). If the calculation is performed again, the estimation accuracy of the rotational phase angle α is improved. Accordingly, if the vibration frequency f is recalculated (corrected) using the recalculated rotational phase angle α, the estimation accuracy of the vibration frequency f can be improved.
最後に、電力系統の動揺が発散するか否かの判別手法について説明する。 Finally, a method for determining whether or not power system fluctuations will diverge will be described.
まず、発散するか否かの判別のため、次式を用いた計算を行う。 First, in order to determine whether or not to diverge, calculation using the following equation is performed.
ここで、上記(44)式における各記号の意味は、次の通りである。
ts:電圧振幅予測のための設定時間
Vsg:ゲージ電圧Vgを用いて計算した設定時間ts後の電圧振幅予測値
Vn:現時点における電圧振幅
T:サンプリング周期
Vg:計算したゲージ電圧
λ:推定した減衰係数
Here, the meaning of each symbol in the above equation (44) is as follows.
t s: setting time V sg for voltage amplitude prediction: Gauge voltage V g voltage amplitude prediction value after setting the calculation time t s with V n: the voltage at the moment the amplitude T: sampling period V g: calculated gauge Voltage λ: Estimated attenuation coefficient
なお、上記(44)式の展開では、同式のVnとして、(4)式における第1式右辺の第1項にあるv(t)の振幅値を用いて展開した。 In the expansion of the above equation (44), the amplitude value of v (t) in the first term on the right side of the first equation in equation (4) is expanded as V n of the equation.
減衰係数λが正の場合、(44)式で求めた電圧振幅予測値Vsgは、現時点の電圧振幅Vnよりも大きくなる。 When the attenuation coefficient λ is positive, the voltage amplitude predicted value V sg obtained by the equation (44) is larger than the current voltage amplitude V n .
同様に、次式を用いた計算を行う。 Similarly, calculation using the following equation is performed.
ここで、上記(45)式における各記号の意味は、次の通りである。
ts:電圧振幅予測のための設定時間
Vsgd:ゲージ差分電圧Vgdを用いて計算した設定時間ts後の電圧振幅予測値
Vn:現時点における電圧振幅
T:サンプリング周期
Vgd:計算したゲージ差分電圧
λ:推定した減衰係数
Here, the meaning of each symbol in the above equation (45) is as follows.
t s: setting time V sgd for voltage amplitude prediction: gauge differential voltage V voltage amplitude prediction value of the set time t s after gd calculated using V n: the voltage at the moment the amplitude T: sampling period V gd: calculated Gauge differential voltage λ: Estimated damping coefficient
なお、上記(45)式の展開では、同式のVnとして、(11)式における第1式右辺の第1項にあるv(t)の振幅値を用いて展開した。 In the expansion of the above expression (45), the amplitude value of v (t) in the first term on the right side of the first expression in expression (11) is expanded as V n in the expression.
減衰係数λが正の場合、(45)式で求めた電圧振幅予測値Vsgdは、現時点の電圧振幅Vnよりも大きくなる。 When the attenuation coefficient λ is positive, the voltage amplitude predicted value V sgd obtained by the equation (45) is larger than the current voltage amplitude V n .
そして、下記の条件式を満足する場合、電力系統の動揺が発散する、もしく発散傾向にある(以下「発散傾向にある」場合を含め、単に「発散する」と表現する)と判定する。 When the following conditional expression is satisfied, it is determined that the fluctuation of the electric power system diverges or tends to diverge (hereinafter simply expressed as “diversity” including the case of “diverging tendency”).
なお、上記(46)式において、VSETは起動閾値である。 In the above equation (46), V SET is a start threshold value.
以上、振動周波数fおよび減衰係数λの推定手順ならびに、動揺発散の判別手法を説明してきた。ここで、改めて、これら推定手順および判別手法の要点、すなわち本願発明にて提案するアルゴリズムの要点を簡潔に記載する。 As described above, the estimation procedure of the vibration frequency f and the damping coefficient λ and the method of discriminating the fluctuation divergence have been described. Here, the main points of these estimation procedures and discrimination methods, that is, the main points of the algorithm proposed in the present invention will be briefly described.
まず、提案アルゴリズムの着目点は、以下の通りである。
(1)一定の時間幅、且つ、一定のサンプリング周波数下で、当該サンプリング周波数の1/2以下の振動周波数に対応する減衰係数が存在することに着目する。
First, the focus of the proposed algorithm is as follows.
(1) Note that there is an attenuation coefficient corresponding to a vibration frequency equal to or less than ½ of the sampling frequency under a certain time width and a certain sampling frequency.
また、提案アルゴリズムにおける算出手法(手順)は、以下の通りである。
(1)減衰係数λと振動周波数fとを分離し、スパイラルベクトルの対称性を利用して回転位相角αを求める。
(2)(1)で求めた回転位相角αを用いて振動周波数fを求める。
(3)振動周波数を用いて、ゲージ電圧またはゲージ差分電圧を算出する。
(4)ゲージ電圧またはゲージ差分電圧に最小二乗法を適用して減衰係数を推定する。
The calculation method (procedure) in the proposed algorithm is as follows.
(1) The damping coefficient λ and the vibration frequency f are separated, and the rotational phase angle α is obtained using the symmetry of the spiral vector.
(2) The vibration frequency f is obtained using the rotational phase angle α obtained in (1).
(3) A gauge voltage or a gauge differential voltage is calculated using the vibration frequency.
(4) The damping coefficient is estimated by applying the least square method to the gauge voltage or the gauge differential voltage.
また、動揺判別の基本的な考え方は、以下の通りである。
(1)現時点からの所定時間後の未来値を予測し、起動閾値に基づいて、動揺の可能性を判別する。
In addition, the basic concept of motion discrimination is as follows.
(1) A future value after a predetermined time from the present time is predicted, and the possibility of shaking is determined based on the activation threshold.
なお、上記の説明では、ゲージ電圧およびゲージ差分電圧の算出手法として、3点の実効値データの二乗積分演算および3点の差分実効値データの二乗積分演算を用いる場合について説明したが、二乗積分演算に限定されるものではなく、他の積分手法が適用可能であることは言うまでもない。 In the above description, the case of using the square integral calculation of the three-point effective value data and the square integral calculation of the three-point difference effective value data as the calculation method of the gauge voltage and the gauge differential voltage has been described. Needless to say, the present invention is not limited to calculation, and other integration methods can be applied.
また、上記の説明では、減衰係数の推定手法として最小二乗法を用いる場合について説明したが、最小二乗法は、従属変数(目的変数)と独立変数(説明変数)との間を定量的に分析する種々の回帰分析手法の一つであり、他の回帰分析手法が適用可能であることは言うまでもない。 In the above explanation, the case where the least square method is used as the attenuation coefficient estimation method has been described. However, the least square method quantitatively analyzes between the dependent variable (objective variable) and the independent variable (explanatory variable). Needless to say, this is one of various regression analysis methods, and other regression analysis methods can be applied.
つぎに、上記アルゴリズムを具現する電力動揺検出装置の構成および動作について図6および図7を参照して説明する。図6は、本実施の形態に係る電力動揺検出装置の機能構成を示す図であり、図7は、電力動揺検出装置における処理の流れを示すフローチャートである。 Next, the configuration and operation of a power fluctuation detection device that implements the above algorithm will be described with reference to FIGS. 6 and 7. FIG. 6 is a diagram showing a functional configuration of the power fluctuation detection device according to the present embodiment, and FIG. 7 is a flowchart showing a processing flow in the power fluctuation detection device.
図6に示すように、本実施の形態にかかる電力動揺検出装置1は、交流電圧瞬時値データ入力部2、電圧実効値算出部3、ゲージ電圧算出部4、ゲージ差分電圧算出部5、回転位相角算出部6、振動周波数算出部7、減衰係数算出部8、振動周波数補正部9、動揺判別部10、インターフェース部11および、記憶部12を備えて構成される。なお、インターフェース部11は、演算結果等を表示装置や外部装置に出力する処理を行い、記憶部12は、計測データや演算結果などを記憶する処理を行う。
As shown in FIG. 6, the power
上記の構成において、交流電圧瞬時値データ入力部2は、電力系統に設けられた計器用変圧器(PT)からの電圧瞬時値を読み込む処理を行う(ステップS101)。なお、読み込まれた電圧瞬時値のデータは、記憶部12に格納される。
In said structure, the alternating voltage instantaneous value
電圧実効値算出部3、記憶部12に格納された電圧瞬時値データを用いて電圧実効値を算出する(ステップS102)。なお、電圧実効値の算出については公知であり、本願発明者による先願発明(例えば、上記した特許文献2,3)の内容を参照されたい。特許文献2では、12個のタイミングで計測された電圧に基づいて、基準波1周期の間の電圧実効値を算出する手法を開示している。特許文献3では、電圧瞬時値データを用いてリアルタイム周波数を算出し、このリアルタイム周波数を用いて最小二乗法にて時系列推定データを求め、さらに、時系列推定データから電圧実効値、電流実効値などを算出する手法を開示している。
A voltage effective value is calculated using the voltage instantaneous value data stored in the voltage effective
ゲージ電圧算出部4は、電圧実効値算出部3が算出した電圧実効値をスパイラルベクトルの瞬時値と見なし、上記したゲージ電圧群をなす複数所定の瞬時値データを用いてゲージ電圧を算出する(ステップS103)。このゲージ電圧の演算処理については、上述したアルゴリズの概念も含めて総括的に説明すると、つぎのように説明できる。すなわち、交流電圧の実効値を当該実効値における振動周波数の2倍以上のサンプリング周波数でサンプリングした連続する少なくとも3点の実効値データの二乗積分演算により求めた値を正規化してゲージ電圧として算出する処理を行う。算出に必要な電圧実効値の瞬時値データは、標本化定理を満足させるため、振動周波数の2倍以上のサンプリング周波数でサンプリングされている必要があることは言うまでもない。なお、本実施の形態では、二乗積分演算として、3点の実効値データのうち、中間時刻における実効値の2乗値と、中間時刻以外の実効値積との差を加算平均する式を例示している((7)、(28)式参照)。
The gauge
ゲージ差分電圧算出部5は、電圧実効値算出部3が算出した電圧実効値をスパイラルベクトルの瞬時値と見なし、上記したゲージ差分電圧群をなす複数所定の瞬時値データを用いてゲージ差分電圧を算出する(ステップS104)。このゲージ電圧の演算処理については、上述したアルゴリズの概念も含めて総括的に説明すると、つぎのように説明できる。すなわち、交流電圧の実効値を当該実効値における振動周波数の2倍以上のサンプリング周波数でサンプリングした連続する少なくとも4点の実効値データにおける隣接する2点の実効値データ間の先端間距離を表す3点の差分実効値データの例えば二乗積分演算により求めた値を正規化してゲージ差分電圧として算出する処理を行う。算出に必要な電圧実効値の瞬時値データが、標本化定理を満足していることは、ゲージ電圧のときと同様である。なお、本実施の形態では、二乗積分演算として、3点の差分実効値データのうち、中間時刻における差分実効値の2乗値と、中間時刻以外の差分実効値積との差を加算平均する式を例示している((12)、(29)式参照)。
The gauge differential
回転位相角算出部6は、ゲージ電圧算出部4にて算出されたゲージ電圧と、ゲージ差分電圧算出部5にて算出されたゲージ差分電圧を用いて、サンプリング1周期に対応する回転位相角を算出する(ステップS105、(18)、(20)式参照)。
The rotation phase
振動周波数算出部7は、算出した回転位相角およびサンプリング周波数(サンプリング周期の逆数)を用いて、上述した振動周波数fを算出する(ステップS106、(21)式参照)。
The vibration
減衰係数算出部8は、ゲージ電圧算出部4にて算出された複数のゲージ電圧の時系列データに対し、例えば最小二乗法を適用することで当該ゲージ電圧の振動周波数に対応する減衰係数λを推定する(ステップS107、(36)式参照)。なお、この減衰係数λは、ゲージ差分電圧算出部5にて算出された複数のゲージ差分電圧の時系列データを用いて算出することも可能である((43)式参照)。
The attenuation
なお、振動周波数fの精度を高めたい場合、振動周波数補正部9は、許容される計算時間の範囲内において、ステップS105にて算出した減衰係数λを上記(18)式に代入して回転位相角αを再計算し、この回転位相角αを用いて振動周波数fを補正(再計算)することも可能である(ステップS108)。
When it is desired to increase the accuracy of the vibration frequency f, the vibration
動揺判別部10は、電力系統の動揺が発散するか否かを判定する(ステップS109)。より詳細に説明すると、動揺判別部10は、ゲージ電圧およびゲージ差分電圧をそれぞれ用いて算出した所定時間(所定の設定時間)後におけるゲージ電圧およびゲージ差分電圧の各電圧振幅を予測し、これらの予測値が起動閾値を超えているか否かを判定し、両者の値が起動閾値を超えていれば動揺が発散すると判定する。
The
最後のステップS110では、上述した全体のフローを終了するか否かの判定処理を行い、終了でなければ(ステップS110,No)、ステップS101〜S109までの処理を繰り返し行う。 In the last step S110, the process for determining whether or not to end the above-described overall flow is performed. If it is not the end (step S110, No), the processes from step S101 to S109 are repeated.
つぎに、本実施の形態の電力動揺検出装置に対して行ったシミュレーション結果について説明する。下記表1は、ケース1のパラメータを示したものである。
Next, simulation results performed on the power fluctuation detection device of the present embodiment will be described. Table 1 below shows the parameters of
なお、本シミュレーションでは、ケース1〜4のシミュレーションについて説明するが、ケース1〜3では、次式の入力波形を想定する。 In addition, although this simulation demonstrates the simulation of cases 1-4, in cases 1-3, the following input waveform is assumed.
![]()
![]()
上記(47)式において、Vは入力電圧振幅の初期値、φは入力電圧の初期位相角、fは入力振動周波数、λは入力減衰係数である。 In the above equation (47), V is the initial value of the input voltage amplitude, φ is the initial phase angle of the input voltage, f is the input vibration frequency, and λ is the input attenuation coefficient.
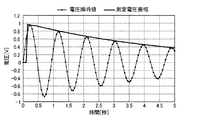
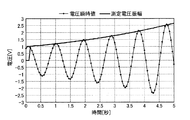
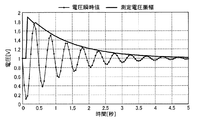
図8は、ケース1における電圧瞬時値の波形および測定電圧振幅を示す図である。図8において、黒菱形記号を結ぶ波形は電圧瞬時値を表し、プロット記号なしの実線波形は測定電圧振幅を表している。図8から、電圧振幅が正しく測定されていることが分かる。
FIG. 8 is a diagram illustrating a waveform of an instantaneous voltage value and a measured voltage amplitude in
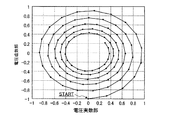
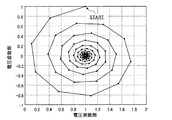
図9は、ケース1における複素平面上の電圧スパイラルベクトルを示す図である。図9から、ケース1では、電圧振幅が減少していくことが分かる。
FIG. 9 is a diagram illustrating a voltage spiral vector on the complex plane in
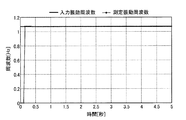
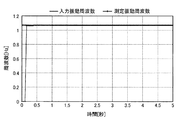
図10は、ケース1における入力振動周波数(シミュレーション上の設定値)および測定(計算)振動周波数を示す図である。図10において、黒菱形記号を結ぶ波形は測定振動周波数である。図10から、計算に必要なデータ点数が揃った以降正しい振動周波数が測定(計算)されていることが分かる。
FIG. 10 is a diagram showing an input vibration frequency (set value in simulation) and a measurement (calculation) vibration frequency in
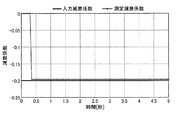
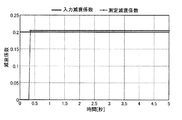
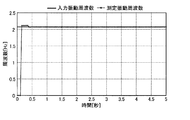
図11は、ケース1における入力減衰係数および測定減衰係数を示す図である。図11において、黒菱形記号を結ぶ波形は測定減衰係数である。図11から、入力減衰係数と測定減衰係数との間には僅かな誤差が存在する。しかしながら、測定減衰係数の誤差を計算すると次式に示すように2%程度であり、許容範囲内であると考える。
FIG. 11 is a diagram illustrating an input attenuation coefficient and a measured attenuation coefficient in
つぎに、持続動揺のケースであるケース2について説明する。下記表2は、ケース2のパラメータを示したものである。
Next,
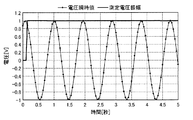
図12は、ケース2における電圧瞬時値の波形および測定電圧振幅を示す図である。図12において、黒菱形記号を結ぶ波形は電圧瞬時値を表し、プロット記号なしの実線波形は測定電圧振幅を表している。図12から、電圧振幅が正しく測定されていることが分かる。
FIG. 12 is a diagram illustrating a waveform of an instantaneous voltage value and a measured voltage amplitude in
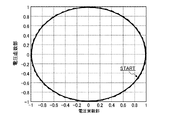
図13は、ケース2における複素平面上の電圧スパイラルベクトルを示す図である。この図13から、ケース2では、電圧振幅は殆ど減少せず、振動が持続していることが分かる。
FIG. 13 is a diagram illustrating voltage spiral vectors on the complex plane in
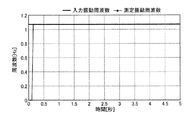
図14は、ケース2における入力振動周波数および測定(計算)振動周波数を示す図である。図14において、黒菱形記号を結ぶ波形は測定振動周波数である。図14から、計算に必要なデータ点数が揃った以降正しい振動周波数が測定(計算)されていることが分かる。
FIG. 14 is a diagram showing an input vibration frequency and a measurement (calculation) vibration frequency in
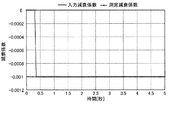
図15は、ケース2における入力減衰係数および測定減衰係数を示す図である。図15において、黒菱形記号を結ぶ波形は測定減衰係数である。図15から、減衰係数が正しく測定されていることが分かる。
FIG. 15 is a diagram illustrating an input attenuation coefficient and a measured attenuation coefficient in
つぎに、発散動揺のケースであるケース3について説明する。下記表3は、ケース3のパラメータを示したものである。
Next,
図16は、ケース3における電圧瞬時値の波形および測定電圧振幅を示す図である。図16において、黒菱形記号を結ぶ波形は電圧瞬時値を表し、プロット記号なしの実線波形は測定電圧振幅を表している。図16から、電圧振幅が正しく測定されていることが分かる。
FIG. 16 is a diagram showing a waveform of a voltage instantaneous value and a measured voltage amplitude in
図17は、ケース3における複素平面上の電圧スパイラルベクトルを示す図である。この図17から、ケース3では、電圧振幅が増大していくことが分かる。
FIG. 17 is a diagram illustrating a voltage spiral vector on the complex plane in
図18は、ケース3における入力振動周波数および測定(計算)振動周波数を示す図である。図18において、黒菱形記号を結ぶ波形は測定振動周波数である。図18から、計算に必要なデータ点数が揃った以降正しい振動周波数が測定(計算)されていることが分かる。
FIG. 18 is a diagram illustrating an input vibration frequency and a measurement (calculation) vibration frequency in
図19は、ケース3における入力減衰係数および測定減衰係数を示す図である。図19において、黒菱形記号を結ぶ波形は測定減衰係数である。図19から、入力減衰係数と測定減衰係数との間には僅かな誤差が存在する。しかしながら、測定減衰係数の誤差を計算すると次式に示すように2%程度であり、許容範囲内であると考える。
FIG. 19 is a diagram illustrating an input attenuation coefficient and a measured attenuation coefficient in
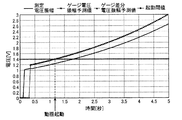
図20は、ケース3における動揺判別結果を説明する図である。図20において、プロット記号なしの実線波形は測定電圧振幅、X記号を結ぶ波形はゲージ電圧振幅の予測値、黒三角記号を結ぶ波形はゲージ差分電圧振幅の予測値、黒四角記号を結ぶ波形は起動閾値を表している。ここで、ゲージ電圧およびゲージ差分電圧の各振幅予測値は、設定時間tsを0.5秒に設定し、上述した(44)、(45)式を用いて計算した。図20から、ゲージ電圧振幅とゲージ差分電圧の各予測値は、ほぼ一致していることが分かる。なお、図示のように、起動閾値を1.4Vに設定すれば、1.2秒程度での動揺起動が可能となる。
FIG. 20 is a diagram for explaining the motion determination result in
つぎに、動揺波形に直流成分が含まれるケースであるケース4について説明する。下記表4は、ケース4のパラメータを示したものである。
Next,
なお、ケース4では、次式の入力波形を想定する。
In
![]()
![]()
上記(47)式において、Vは入力電圧振幅の初期値、V0は入力電圧の直流成分、φは入力電圧の初期位相角、fは入力振動周波数、λは入力減衰係数である。一方、直流成分を有する動揺波形は、次式ように式変換することができ、ケース1〜3の場合と同様な取り扱いが可能である((47)式を参照)。
In the above equation (47), V is the initial value of the input voltage amplitude, V 0 is the DC component of the input voltage, φ is the initial phase angle of the input voltage, f is the input vibration frequency, and λ is the input attenuation coefficient. On the other hand, the fluctuation waveform having a DC component can be converted into the following equation and can be handled in the same manner as in
![]()
![]()
図21は、ケース4における電圧瞬時値の波形および測定電圧振幅を示す図である。図21において、黒菱形記号を結ぶ波形は電圧瞬時値を表し、プロット記号なしの実線波形は測定電圧振幅を表している。図21から、電圧振幅が正しく測定されていることが分かる。
FIG. 21 is a diagram showing the waveform of the voltage instantaneous value and the measured voltage amplitude in
図22は、ケース4における複素平面上の電圧スパイラルベクトルを示す図である。図22から、ケース4では、電圧振幅が減少していくことが分かる。
FIG. 22 is a diagram illustrating a voltage spiral vector on the complex plane in
図23は、ケース4における入力振動周波数(シミュレーション上の設定値)および測定(計算)振動周波数を示す図である。図23において、黒菱形記号を結ぶ波形は測定振動周波数である。図23から、計算に必要なデータ点数が揃った以降正しい振動周波数が測定(計算)されていることが分かる。なお、図23を参照すると、0.2秒程度で振動周波数が算出された後、さらに0.4秒近傍付近において度理論値に近い計算値が得られている。これは、減衰係数の算出後に振動周波数の補正計算を行ったことによるものであり、振動周波数の測定(計算)精度が向上していることが確認できる。
FIG. 23 is a diagram showing an input vibration frequency (set value in simulation) and a measurement (calculation) vibration frequency in
図24は、ケース4における入力減衰係数および測定減衰係数を示す図である。図24において、黒菱形記号を結ぶ波形は測定減衰係数である。図24から、入力減衰係数と測定減衰係数との間には若干の誤差が存在する。測定減衰係数の誤差を計算すると次式の通りである。
FIG. 24 is a diagram illustrating an input attenuation coefficient and a measured attenuation coefficient in
![]()
![]()
上記(52)式に示すように、入力減衰係数と測定減衰係数との間には7.5%程度の誤差がある。しかしながら、電力動揺検出装置が至短時間のオンライン計算を行うのは、動揺の発散、収束の判定であり、(52)式に示す程度の誤差であれば、起動閾値を適切に調整することにより、高速な動揺検出を維持することが可能になる。 As shown in the above equation (52), there is an error of about 7.5% between the input attenuation coefficient and the measured attenuation coefficient. However, it is the determination of the divergence and convergence of the fluctuation that the power fluctuation detection device performs the shortest online calculation. If the error is as large as shown in the equation (52), the start threshold is adjusted appropriately. It will be possible to maintain fast motion detection.
以上説明したように、本実施の形態に係る電力動揺検出装置および電力動揺検出方法によれば、電圧実効値を当該電圧実効値における振動周波数の2倍以上のサンプリング周波数でサンプリングした連続する少なくとも3点の電圧実効値データの積分演算により求めた振幅値を正規化してゲージ電圧として算出し、当該3点の電圧実効値データを含む連続する少なくとも4点の電圧実効値データにおける隣接する2点の電圧実効値データ間の先端間距離を表す3点の差分電圧実効値データの積分演算により求めた値を正規化してゲージ差分電圧として算出し、これらゲージ電圧、ゲージ差分電圧およびサンプリング周波数を用いて振動周波数を算出し、ゲージ電圧の時系列データに最小二乗法を適用し、ゲージ電圧の振動周波数に対応する減衰係数を算出し、所定時間後におけるゲージ振幅およびゲージ差分振幅の各予測値に基づいて電力系統の動揺が発散傾向にあるか否かを判定することとしたので、至短時間での動揺判定が可能となり、電力系統の動揺の高速かつ高精度な検出が可能になる。 As described above, according to the power fluctuation detection apparatus and the power fluctuation detection method according to the present embodiment, the voltage effective value is sampled at a sampling frequency that is at least twice the vibration frequency of the voltage effective value. The amplitude value obtained by the integral calculation of the voltage effective value data at the point is normalized and calculated as a gauge voltage, and the adjacent two points in the continuous voltage effective value data including the three voltage effective value data are calculated. Normalize the value obtained by integration of the differential voltage RMS value data of the three points representing the distance between the effective voltage data, and calculate it as a gauge differential voltage. Using these gauge voltage, gauge differential voltage and sampling frequency Calculate the vibration frequency, apply the least-squares method to the time series data of the gauge voltage, and reduce it to correspond to the vibration frequency of the gauge voltage. The coefficient is calculated, and it is decided whether or not the power system fluctuation tends to diverge based on the predicted values of the gauge amplitude and the gauge differential amplitude after a predetermined time. This makes it possible to detect fluctuations in the power system at high speed and with high accuracy.
また、従来の電力動揺検出装置または電力動揺検出方法は、オフラインの計測結果を解析した上で動揺の傾向や特徴を分析してデータベース化し、データベース化された情報に基づいて動揺判定を行うことが主流であったため、動揺判定をリアルタイムに行うことができなかった。一方、本実施の形態に係る電力動揺検出装置および電力動揺検出方法によれば、オンライでの測定を行い、現に存在している動揺を検出できるので、リアルタイムな動揺判定を行うことが可能となる。 In addition, the conventional power fluctuation detection device or power fluctuation detection method can analyze the tendency and characteristics of fluctuations after analyzing the offline measurement results and create a database, and perform fluctuation determination based on the database information. Because it was mainstream, it was not possible to make a shake determination in real time. On the other hand, according to the power fluctuation detection device and the power fluctuation detection method according to the present embodiment, it is possible to perform real-time fluctuation determination because measurement can be performed online and fluctuations that are present can be detected. .
なお、上記の実施の形態に示した構成は、本発明の構成の一例であり、別の公知の技術と組み合わせることも可能であるし、本発明の要旨を逸脱しない範囲で、一部を省略する等、変更して構成することも可能であることは言うまでもない。 Note that the configuration shown in the above embodiment is an example of the configuration of the present invention, and can be combined with another known technique, and a part thereof is omitted without departing from the gist of the present invention. Needless to say, it is possible to change the configuration.
以上のように、本発明に係る電力動揺検出装置および電力動揺検出方法は、電力系統の動揺の高速かつ高精度な検出を可能とする発明として有用である。 As described above, the power fluctuation detection device and the power fluctuation detection method according to the present invention are useful as an invention that enables high-speed and high-accuracy detection of power system fluctuation.
1 電力動揺検出装置
2 交流電圧瞬時値データ入力部
3 電圧実効値算出部
4 ゲージ電圧算出部
5 ゲージ差分電圧算出部
6 回転位相角算出部
7 振動周波数算出部
8 減衰係数算出部
9 振動周波数補正部
10 動揺判別部
11 インターフェース部
12 記憶部
DESCRIPTION OF
Claims (8)
前記交流電気量の実効値を当該実効値における主振動周波数の2倍以上のサンプリング周波数でサンプリングした連続する少なくとも3点の実効値データの積分演算により求めた振幅値の正規化値であるゲージ振幅を算出するゲージ振幅算出部と、
前記サンプリング周波数でサンプリングされ、前記ゲージ振幅を算出する際に用いた3点の実効値データを含む連続する少なくとも4点の実効値データにおける隣接する2点の実効値データ間の先端間距離を表す3点の差分実効値データの積分演算により求めた値の正規化値であるゲージ差分振幅を算出するゲージ差分振幅算出部と、
前記ゲージ振幅および前記ゲージ差分振幅を用いてサンプリング1周期時間における回転位相角を算出する回転位相角算出部と、
前記回転位相角および前記サンプリング周波数を用いて前記主振動周波数を算出する振動周波数算出部と、
前記ゲージ振幅の時系列データに回帰分析手法を適用し、当該ゲージ振幅の主振動周波数に対応する減衰係数を算出する減衰係数算出部と、
前記ゲージ振幅およびゲージ差分振幅を用いて算出した所定時間後におけるゲージ振幅およびゲージ差分振幅の各予測値に基づいて前記電力系統の動揺が発散傾向にあるか否かを判定する動揺判定部と、
を備えたことを特徴とする電力動揺検出装置。 A power fluctuation detection device that detects fluctuations in the electric power system based on an effective value of the AC electric quantity measured in the electric power system,
Gauge amplitude which is a normalized value of the amplitude value obtained by integrating the effective value data of at least three consecutive points obtained by sampling the effective value of the AC electric quantity at a sampling frequency that is at least twice the main vibration frequency in the effective value. A gauge amplitude calculation unit for calculating
Represents the tip-to-tip distance between two adjacent effective value data in at least four consecutive effective value data that are sampled at the sampling frequency and used to calculate the gauge amplitude. A gauge difference amplitude calculation unit that calculates a gauge difference amplitude that is a normalized value of a value obtained by integration calculation of three points of difference effective value data;
A rotational phase angle calculation unit for calculating a rotational phase angle in one sampling period using the gauge amplitude and the gauge differential amplitude;
A vibration frequency calculation unit that calculates the main vibration frequency using the rotation phase angle and the sampling frequency;
Applying a regression analysis method to the time series data of the gauge amplitude, a damping coefficient calculating unit for calculating a damping coefficient corresponding to the main vibration frequency of the gauge amplitude,
A sway determination unit that determines whether or not the sway of the electric power system tends to diverge based on each predicted value of the gauge amplitude and the gauge difference amplitude after a predetermined time calculated using the gauge amplitude and the gauge difference amplitude;
A power fluctuation detection device comprising:
前記交流電気量の実効値を当該実効値における主振動周波数の2倍以上のサンプリング周波数でサンプリングした連続する少なくとも3点の実効値データの積分演算により求めた振幅値の正規化値であるゲージ振幅を算出するゲージ振幅算出部と、
前記サンプリング周波数でサンプリングされ、前記ゲージ振幅を算出する際に用いた3点の実効値データを含む連続する少なくとも4点の実効値データにおける隣接する2点の実効値データ間の先端間距離を表す3点の差分実効値データの積分演算により求めた値の正規化値であるゲージ差分振幅を算出するゲージ差分振幅算出部と、
前記ゲージ振幅および前記ゲージ差分振幅を用いてサンプリング1周期時間における回転位相角を算出する回転位相角算出部と、
前記回転位相角および前記サンプリング周波数を用いて前記主振動周波数を算出する振動周波数算出部と、
前記ゲージ差分振幅の時系列データに回帰分析手法を適用し、当該ゲージ差分振幅の主振動周波数に対応する減衰係数を算出する減衰係数算出部と、
前記ゲージ振幅およびゲージ差分振幅を用いて算出した所定時間後におけるゲージ振幅およびゲージ差分振幅の各予測値に基づいて前記電力系統の動揺が発散傾向にあるか否かを判定する動揺判定部と、
を備えたことを特徴とする電力動揺検出装置。 A power fluctuation detection device that detects fluctuations in the electric power system based on an effective value of the AC electric quantity measured in the electric power system,
Gauge amplitude which is a normalized value of the amplitude value obtained by integrating the effective value data of at least three consecutive points obtained by sampling the effective value of the AC electric quantity at a sampling frequency that is at least twice the main vibration frequency in the effective value. A gauge amplitude calculation unit for calculating
Represents the tip-to-tip distance between two adjacent effective value data in at least four consecutive effective value data that are sampled at the sampling frequency and used to calculate the gauge amplitude. A gauge difference amplitude calculation unit that calculates a gauge difference amplitude that is a normalized value of a value obtained by integration calculation of three points of difference effective value data;
A rotational phase angle calculation unit for calculating a rotational phase angle in one sampling period using the gauge amplitude and the gauge differential amplitude;
A vibration frequency calculation unit that calculates the main vibration frequency using the rotation phase angle and the sampling frequency;
Applying a regression analysis method to the time series data of the gauge difference amplitude, a damping coefficient calculating unit that calculates a damping coefficient corresponding to the main vibration frequency of the gauge difference amplitude;
A sway determination unit that determines whether or not the sway of the electric power system tends to diverge based on each predicted value of the gauge amplitude and the gauge difference amplitude after a predetermined time calculated using the gauge amplitude and the gauge difference amplitude;
A power fluctuation detection device comprising:
前記交流電気量の実効値を当該実効値における主振動周波数の2倍以上のサンプリング周波数でサンプリングした連続する少なくとも3点の実効値データの積分演算により求めた振幅値の正規化値であるゲージ振幅を算出するステップと、
前記サンプリング周波数でサンプリングされ、前記ゲージ振幅を算出する際に用いた3点の実効値データを含む連続する少なくとも4点の実効値データにおける隣接する2点の実効値データ間の先端間距離を表す3点の差分実効値データの積分演算により求めた値の正規化値であるゲージ差分振幅を算出するステップと、
前記ゲージ振幅および前記ゲージ差分振幅を用いてサンプリング1周期時間における回転位相角を算出するステップと、
前記回転位相角および前記サンプリング周波数を用いて前記主振動周波数を算出するステップと、
前記ゲージ振幅の時系列データに回帰分析手法を適用し、当該ゲージ振幅の主振動周波数に対応する減衰係数を算出するステップと、
前記ゲージ振幅およびゲージ差分振幅を用いて算出した所定時間後におけるゲージ振幅およびゲージ差分振幅の各予測値に基づいて前記電力系統の動揺が発散傾向にあるか否かを判定するステップと、
を含むことを特徴とする電力動揺検出方法。 A power fluctuation detection method for detecting a fluctuation of a power system based on an effective value of an AC electric quantity measured in the power system,
Gauge amplitude which is a normalized value of the amplitude value obtained by integrating the effective value data of at least three consecutive points obtained by sampling the effective value of the AC electric quantity at a sampling frequency that is at least twice the main vibration frequency in the effective value. Calculating steps,
Represents the tip-to-tip distance between two adjacent effective value data in at least four consecutive effective value data that are sampled at the sampling frequency and used to calculate the gauge amplitude. Calculating a gauge differential amplitude which is a normalized value of a value obtained by integration of three points of effective RMS data;
Calculating a rotational phase angle in one sampling period using the gauge amplitude and the gauge differential amplitude;
Calculating the main vibration frequency using the rotational phase angle and the sampling frequency;
Applying a regression analysis method to the time series data of the gauge amplitude, calculating a damping coefficient corresponding to the main vibration frequency of the gauge amplitude;
Determining whether the fluctuation of the electric power system tends to diverge based on the predicted values of the gauge amplitude and the gauge differential amplitude after a predetermined time calculated using the gauge amplitude and the gauge differential amplitude;
A power fluctuation detection method comprising:
前記交流電気量の実効値を当該実効値における主振動周波数の2倍以上のサンプリング周波数でサンプリングした連続する少なくとも3点の実効値データの積分演算により求めた振幅値の正規化値であるゲージ振幅を算出するステップと、
前記サンプリング周波数でサンプリングされ、前記ゲージ振幅を算出する際に用いた3点の実効値データを含む連続する少なくとも4点の実効値データにおける隣接する2点の実効値データ間の先端間距離を表す3点の差分実効値データの積分演算により求めた値の正規化値であるゲージ差分振幅を算出するステップと、
前記ゲージ振幅および前記ゲージ差分振幅を用いてサンプリング1周期時間における回転位相角を算出するステップと、
前記回転位相角および前記サンプリング周波数を用いて前記主振動周波数を算出するステップと、
前記ゲージ差分振幅の時系列データに回帰分析手法を適用し、当該ゲージ差分振幅の主振動周波数に対応する減衰係数を算出するステップと、
前記ゲージ振幅およびゲージ差分振幅を用いて算出した所定時間後におけるゲージ振幅およびゲージ差分振幅の各予測値に基づいて前記電力系統の動揺が発散傾向にあるか否かを判定するステップと、
を含むことを特徴とする電力動揺検出方法。 A power fluctuation detection method for detecting a fluctuation of a power system based on an effective value of an AC electric quantity measured in the power system,
Gauge amplitude which is a normalized value of the amplitude value obtained by integrating the effective value data of at least three consecutive points obtained by sampling the effective value of the AC electric quantity at a sampling frequency that is at least twice the main vibration frequency in the effective value. Calculating steps,
Represents the tip-to-tip distance between two adjacent effective value data in at least four consecutive effective value data that are sampled at the sampling frequency and used to calculate the gauge amplitude. Calculating a gauge differential amplitude which is a normalized value of a value obtained by integration of three points of effective RMS data;
Calculating a rotational phase angle in one sampling period using the gauge amplitude and the gauge differential amplitude;
Calculating the main vibration frequency using the rotational phase angle and the sampling frequency;
Applying a regression analysis method to the time series data of the gauge difference amplitude, and calculating a damping coefficient corresponding to the main vibration frequency of the gauge difference amplitude;
Determining whether the fluctuation of the electric power system tends to diverge based on the predicted values of the gauge amplitude and the gauge differential amplitude after a predetermined time calculated using the gauge amplitude and the gauge differential amplitude;
A power fluctuation detection method comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010291101A JP5538203B2 (en) | 2010-12-27 | 2010-12-27 | Power fluctuation detection device and power fluctuation detection method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010291101A JP5538203B2 (en) | 2010-12-27 | 2010-12-27 | Power fluctuation detection device and power fluctuation detection method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012139067A JP2012139067A (en) | 2012-07-19 |
| JP5538203B2 true JP5538203B2 (en) | 2014-07-02 |
Family
ID=46676033
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010291101A Active JP5538203B2 (en) | 2010-12-27 | 2010-12-27 | Power fluctuation detection device and power fluctuation detection method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5538203B2 (en) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104583785B (en) * | 2012-08-17 | 2017-07-14 | 三菱电机株式会社 | Electric amount determining device and electric quantity measuring method |
| CN104393606A (en) * | 2014-11-07 | 2015-03-04 | 贵州电力试验研究院 | Power oscillation judging device |
| US9412817B2 (en) | 2014-12-19 | 2016-08-09 | Taiwan Semiconductor Manufacturing Company, Ltd. | Silicide regions in vertical gate all around (VGAA) devices and methods of forming same |
| JP6768489B2 (en) * | 2016-12-22 | 2020-10-14 | 三菱電機株式会社 | Signal processing device and signal processing method |
| CN110492496B (en) * | 2019-07-09 | 2022-12-20 | 广西电网有限责任公司 | Novel subsynchronous oscillation suppression method for power grid containing wind power |
| JP7318419B2 (en) * | 2019-08-28 | 2023-08-01 | 富士電機株式会社 | AC system monitoring system |
| CN111355247B (en) * | 2020-02-18 | 2022-04-01 | 清华大学 | Power grid low-frequency oscillation prediction method and device |
| CN118275759B (en) * | 2024-05-30 | 2024-07-26 | 广州科技贸易职业学院 | Detection method for abnormal voltage change in power system |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0980090A (en) * | 1995-09-14 | 1997-03-28 | Hitachi Ltd | Frequency detector |
| JP2001112163A (en) * | 1999-10-06 | 2001-04-20 | Toshiba Corp | Power oscillation detector |
| JP4038484B2 (en) * | 2004-01-13 | 2008-01-23 | 三菱電機株式会社 | Synchronous phasor measuring device |
| JP5501933B2 (en) * | 2010-10-25 | 2014-05-28 | 三菱電機株式会社 | AC electric quantity measuring device and AC electric quantity measuring method |
-
2010
- 2010-12-27 JP JP2010291101A patent/JP5538203B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012139067A (en) | 2012-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5538203B2 (en) | Power fluctuation detection device and power fluctuation detection method | |
| JP4987068B2 (en) | AC electric quantity measuring device | |
| JP4679525B2 (en) | Active filter | |
| JP6636608B2 (en) | Method and apparatus for detecting voltage in a supply network | |
| JP4879319B2 (en) | Frequency measuring device | |
| JP5214074B1 (en) | Electric quantity measuring device and electric quantity measuring method | |
| JPWO2008126240A1 (en) | Synchronous phasor measuring device and phase angle difference measuring device between buses using the same | |
| JP2005204367A (en) | Synchronous phasor measuring device | |
| US10191094B2 (en) | Synchrophasor measurement method for power systems | |
| WO2014181367A1 (en) | Method and relevant system for converting mechanical energy from a generator actuated by a turbine into electric energy | |
| JP6416072B2 (en) | Synchronous phasor measuring device and pulse generator | |
| CN107144734B (en) | A kind of power distribution network high-precision phasor measurement method suitable for PMU | |
| CN110412415B (en) | Synchronous phasor calculation method based on DFT, multi-order filtering and mutation criterion | |
| US20130030731A1 (en) | Alternating-current electric quantity measuring apparatus and alternating-current electric quantity measuring method | |
| JP5501933B2 (en) | AC electric quantity measuring device and AC electric quantity measuring method | |
| JP6033030B2 (en) | Electric quantity measuring device, electric quantity measuring method, insulation monitoring device and impedance measuring device using these devices and methods | |
| JP6049469B2 (en) | Electric quantity measuring apparatus and electric quantity measuring method, and power system quality monitoring apparatus, three-phase circuit measuring apparatus, electric power system step-out prediction apparatus, active filter and switching pole phase control apparatus using these apparatuses and methods | |
| JP5697956B2 (en) | Reduced model determination apparatus, reduced model determination method, and reduced model determination program | |
| WO2015083397A1 (en) | Calculation device | |
| JP6214489B2 (en) | Signal processing apparatus and signal processing method | |
| Kasztenny | A new method for fast frequency measurement for protection applications | |
| JP6368456B2 (en) | Power fluctuation component output suppression device | |
| Kušljević et al. | Active power measurement algorithm for power system signals under non-sinusoidal conditions and wide-range frequency deviations | |
| JP5188449B2 (en) | Synchronous phasor measuring device | |
| JP5078763B2 (en) | Transmission line accident location device and transmission line accident location method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140314 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5538203 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140428 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |