JP5531455B2 - Vehicle travel control device and vehicle travel control method - Google Patents
Vehicle travel control device and vehicle travel control method Download PDFInfo
- Publication number
- JP5531455B2 JP5531455B2 JP2009134093A JP2009134093A JP5531455B2 JP 5531455 B2 JP5531455 B2 JP 5531455B2 JP 2009134093 A JP2009134093 A JP 2009134093A JP 2009134093 A JP2009134093 A JP 2009134093A JP 5531455 B2 JP5531455 B2 JP 5531455B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- vehicle
- avoidance
- travel control
- obstacle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Description
本発明は、車両の走行制御装置およびその制御方法に関する。 The present invention relates to a vehicle travel control device and a control method therefor.
従来より、車両の走行状況および運転者の操作状況に応じて、車両が障害物に接触することを回避するために車両の運動状態の制御(走行制御)を行う手法が知られている。
また、同様の技術として、車線に沿って車両が走行するように車両の運動状態の制御(走行制御)を行う手法も知られている。車線に沿わせるための走行制御の途中で車両の向きを変化させる場合には、人間が運転の主体者になるため、走行制御中でも運転者の意思による介入を行い得るように構成された手法も知られている(例えば、特許文献1参照)。このような手法によれば、システム側から運転に適した情報を運転者が認識しやすい形で提供するために、車両が車線に沿って走行するために必要な情報を操舵力および操舵角度の形に変換して運転者に伝える。これにより、運転者はこれらの情報を参酌しつつ自らの意思で車両を運転することができる。
2. Description of the Related Art Conventionally, there has been known a method for controlling the movement state of a vehicle (running control) in order to avoid the vehicle from coming into contact with an obstacle according to the traveling state of the vehicle and the operation state of the driver.
Further, as a similar technique, there is also known a method for controlling the vehicle motion state (travel control) so that the vehicle travels along a lane. In the case of changing the direction of the vehicle in the middle of driving control to follow the lane, since the person becomes the driving subject, there is also a method configured to allow intervention by the driver's intention even during driving control It is known (see, for example, Patent Document 1). According to such a method, in order to provide information suitable for driving from the system side in a form that the driver can easily recognize, information necessary for the vehicle to travel along the lane is obtained from the steering force and the steering angle. Convert it into a shape and tell the driver. As a result, the driver can drive the vehicle with his / her own intention while taking these information into consideration.
しかしながら、接触回避のための走行制御においては、特許文献1に開示された手法を適用した場合には、以下に示すような不都合が懸念される。例えば、運転者自身が認識する外界の状況に応じた運転者の操舵と、制御介入による操舵との間にギャップが生じることがあり、この場合、運転者に対して違和感を与えてしまう虞がある。また、このような違和感を解消すべく、状況に応じて制御介入による操舵を抑制することも考えられるが、この場合であっても、適切な回避軌道への誘導を行うことも重要である。 However, in traveling control for avoiding contact, when the method disclosed in Patent Document 1 is applied, there is a concern about the following inconveniences. For example, there may be a gap between the driver's steering according to the external situation recognized by the driver himself and the steering by the control intervention, and in this case, the driver may feel uncomfortable. is there. In order to eliminate such a sense of incongruity, it may be possible to suppress steering by control intervention depending on the situation, but even in this case, it is also important to guide to an appropriate avoidance path.
本発明はかかる事情に鑑みてなされたものであり、その目的は、車両が障害物に接触することを回避するための走行制御を行う際に、運転者に与える違和感を低減するとともに、回避軌道への誘導を適切に行うことである。 The present invention has been made in view of such circumstances, and an object of the present invention is to reduce an uncomfortable feeling given to the driver and avoid an avoidance track when performing a travel control for avoiding the vehicle from contacting an obstacle. It is to guide to appropriately.
かかる課題を解決するために、本発明は、運転者の操作に適合する回避軌道に基づいて自車両を走行制御する。また、この際、回避軌道を処理対象として、障害物および運動状態の検出結果に基づいて、回避軌道と略直交方向に延在する所定範囲における障害物との接触可能性をリスクとして演算する。この場合、演算されるリスクが小さいほど、走行制御が抑制されるとともに、回避軌道に対する自車両の走行状況に応じて、運転者の操舵操作に対する操舵反力が調整される。 In order to solve such a problem, the present invention controls traveling of the host vehicle based on an avoidance track that matches the operation of the driver. At this time, with the avoidance trajectory as a processing target, the possibility of contact with an obstacle in a predetermined range extending in a direction substantially orthogonal to the avoidance trajectory is calculated as a risk based on the detection result of the obstacle and the motion state. In this case, the smaller the calculated risk is, the more the travel control is suppressed, and the steering reaction force against the driver's steering operation is adjusted according to the traveling state of the vehicle with respect to the avoidance track.
本発明によれば、実際の軌道と、選択した回避軌道とに偏差が生じていても、リスクが小さい場合には、制御抑制量が大きくなるので、走行制御による操舵介入量が小さくなる。そのため、運転者自身が認識する外界の状況に応じた運転者の操舵と、制御介入による操舵との間に生じるギャップが抑制される。これにより、運転者が覚える違和感の低減を図ることができる。また、このような違和感を低減した走行制御を行った場合でも、選択された回避軌道に対する自車両の走行状況に応じて操舵反力を調整することで、操舵反力を通じて運転者に回避軌道を認識させることができる。 According to the present invention, even if there is a deviation between the actual trajectory and the selected avoidance trajectory, if the risk is small, the amount of control suppression increases, so the steering intervention amount due to travel control decreases. Therefore, a gap generated between the steering of the driver according to the external situation recognized by the driver and the steering by the control intervention is suppressed. Thereby, it is possible to reduce the uncomfortable feeling that the driver learns. Even when traveling control with such a sense of incongruity is performed, by adjusting the steering reaction force according to the traveling state of the vehicle with respect to the selected avoidance track, the avoidance track can be provided to the driver through the steering reaction force. Can be recognized.
(第1の実施形態)
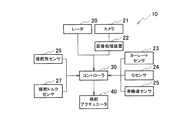
図1は、本発明の第1の実施形態にかかる車両の走行制御装置10が適用された車両を模式的に示す説明図である。この車両の走行制御装置10は、車両が障害物に接触することを回避するために車両の運動状態の制御(走行制御)を行う装置であり、検出系、コントローラ30およびアクチュエータ40,41を主体に構成されている。
(First embodiment)
FIG. 1 is an explanatory diagram schematically showing a vehicle to which a vehicle
レーダ20は、車両の進行方向における物体までの距離および位置を検出する。レーダ20としては、レーザレーダやミリ波レーダなどを用いることができる。例えば、レーダ20としてレーザレーダを用いた場合、このレーダ20は、車両前方にレーザ光を照射し、前方に存在する物体からの反射光を受光系で受光する。そして、レーダ20は、レーザ発射時点と反射光の受光時点との時間差を検出することにより、車両と物体との間の距離および位置を検出する。
The
カメラ21は、車両前方を撮像することにより、撮像画像を画像処理装置22に出力する。画像処理装置22は、カメラ21からの撮像画像を処理することにより、前方に存在する物体や道路環境等の走行環境情報を検出する。
The
ヨーレートセンサ23は、車両1に発生するヨーレートを検出する。Gセンサ24は、車両の前後方向(車長方向)の加速度(以下「前後加速度」という)を検出するとともに、車両の横方向(車幅方向)の加速度(以下「横加速度」という)を検出する。車輪速センサ25は、車両1の各車輪の回転速度を検出することにより、車両の速度(車速)を検出する。
The
操舵角センサ26は、運転者が操作するハンドルの回転角を操舵角として検出する。この操舵角は、直進走行に対応するハンドルの中立状態を基準として、左方向または右方向といった操舵方向とともに操舵角を検出する。操舵トルクセンサ27は、運転者のハンドル操作によって加えられる操舵トルクを検出する。この操舵トルクは、直進走行に対応するハンドルの中立状態を基準として、左方向または右方向といった操舵方向とともに操舵トルクを検出する。
The
図2は、コントローラ30の機能的な構成を示すブロック図である。コントローラ30は、システム全体を統合的に制御する機能を担っており、制御プログラムに従って動作することにより、障害物を回避するための走行制御を行う。コントローラ30としては、CPU、ROM、RAM、I/Oインターフェースを主体に構成されたマイクロコンピュータを用いることができる。このコントローラ30は、検出系によって検出される各種の情報に基づいて、種々の演算を行い、この演算結果に応じた制御信号をアクチュエータ40,41に出力することにより、車両の運動状態の制御(走行制御)を行う。
FIG. 2 is a block diagram illustrating a functional configuration of the
コントローラ30は、これを機能的に捉えた場合、障害物検出部31、運動状態検出部32、運転操作検出部33、回避軌道生成部34、回避軌道選択部35、リスク演算部36、制御抑制部37、操舵反力調整部38および走行制御部39を有している。
When the
障害物検出部31は、レーダ20から検出信号を読み込むとともに、画像処理装置22から処理結果を読み込む。障害物検出部31は、読み込んだ情報に基づいて、自車両と接触する可能性のある物体を障害物として検出する(障害物検出手段)。障害物検出部31による検出結果は、回避軌道生成部34、リスク演算部36および制御抑制部37にそれぞれ出力される。
The
運動状態検出部32は、ヨーレートセンサ23、Gセンサ24および車輪速センサ25から検出信号をそれぞれ読み込む。運動状態検出部32は、読み込んだ各情報から車両の運動状態を検出する(運動状態検出手段)。運動状態検出部32による検出結果は、回避軌道生成部34およびリスク演算部36にそれぞれ出力される。
The motion
運転操作検出部33は、操舵角センサ26および操舵トルクセンサ27から検出信号をそれぞれ読み込む。運転操作検出部33は、読み込んだ情報に基づいて、運転者による運転操作を検出する(運転操作検出手段)。運転操作検出部33による検出結果は、回避軌道選択部35および操舵反力調整部38に対してそれぞれ出力される。
The driving
回避軌道生成部34は、障害物の検出結果と車両の運動状態とに基づいて、障害物との接触を回避するための回避軌道を複数生成する(回避軌道生成手段)。回避軌道生成部34によって生成された複数の回避軌道は、回避軌道選択部35に出力される。
The avoidance
回避軌道選択部35は、運転者の運転操作に基づいて、生成された複数の回避軌道のなかから、運転者の運転操作に適合する回避軌道を選択する(回避軌道選択手段)。回避軌道選択部35によって選択された回避軌道は、リスク演算部36、操舵反力調整部38および走行制御部39にそれぞれ出力される。
The avoidance
リスク演算部36は、障害物の検出結果と車両の運動状態とに基づいて、リスクを演算する(リスク演算手段)。このリスクは、自車両の進行方向(回避軌道)と略直交方向(以下「軌道直交方向」という)に延在する所定範囲における障害物との接触可能性を示す指標である。本実施形態において、リスク演算部36は、回避軌道選択部35によって選択された回避軌道に対応して、リスクを演算する。リスク演算部36によって演算された回避軌道に対応するリスクは、制御抑制部37に対して出力される。
The
制御抑制部37は、演算されたリスクと、障害物の検出結果とに基づいて、制御抑制量を演算する(抑制手段)。制御抑制量は、後述する走行制御部39が、選択された回避軌道に追従するための走行制御を行う場合において、これを抑制するために必要な制御量である。制御抑制部37によって演算された制御抑制量は、走行制御部39に対して出力される。
The
操舵反力調整部38は、選択された回避軌道に対する自車両の走行状況に応じて、運転者の操舵操作に対する操舵反力を調整する(操舵反力調整手段)。具体的には、操舵反力調整部38は、選択された回避軌道に対する自車両の走行状況に応じた操舵反力を付与するための制御量を演算する。
The steering reaction
走行制御部39は、選択された回避軌道と、制御抑制部37によって演算された制御抑制量と、操舵反力調整部38によって演算された制御量とに基づいて、選択された回避軌道を自車両が走行するための走行制御量を演算する。そして、走行制御部39は、走行制御量に基づいて、アクチュエータ40,41を制御することにより、走行制御、すなわち、車両の運動状態を制御する(走行制御手段)。
The traveling
操舵アクチュエータ40は、車輪に横力を付与する(すなわち、車両に横加速度を付与する)アクチュエータであり、例えば、運転者の操舵をアシストするアシストトルクを付与するアシストモータも含む。この操舵アクチュエータ40は、車輪に任意の操舵角を付与させて車両の操舵動作を行うことができるとともに、運転者に対する操舵反力を調整することができる。
The steering
図3は、第1の実施形態にかかる走行制御方法を示すフローチャートである。このフローチャートに示す処理は、車両のイグニッションスイッチがオンされると呼び出され、所定の周期でコントローラ30によって実行される。
FIG. 3 is a flowchart illustrating the travel control method according to the first embodiment. The process shown in this flowchart is called when the ignition switch of the vehicle is turned on, and is executed by the
ステップ10(S10)において、障害物検出部31は、レーダ20と画像処理装置22とからの入力情報に基づいて、車両が走行可能な領域(以下「走行路」という)と、走行路内に存在する物体とを検出する。なお、走行路等の検出方法は本願の出願時点で既に公知であるので詳細な説明は省略する。走行路の検出方法については、例えば、特許第3521860号公報に開示されているので、必要ならば参照されたい。
In step 10 (S10), the
ステップ11(S11)において、障害物検出部31は、ステップ10における検出結果に基づいて、車両と接触する可能性がある物体(以下「障害物」という)が走行路内に存在するか否かを判別する。なお、障害物の検出方法は本願の出願時点で既に公知であるので詳細な説明を省略する。障害物の検出方法については、例えば、特開2000−207693号公報に開示されているので、必要ならば参照されたい。このステップ11において肯定判定された場合、すなわち、障害物が存在する場合には、ステップ12(S12)に進む。一方、ステップ11において否定判定された場合、すなわち、障害物が存在しない場合には、ステップ10の処理に戻る。
In step 11 (S11), the
ステップ12において、障害物検出部31は、障害物と自車両との間の距離および障害物と自車両との相対速度に基づいて、ステップ11の処理により確認された障害物に自車両が接触するまでの時間を接触予測時間Tttcとして算出する。障害物と自車両との間の距離はレーダ20からの入力情報により算出でき、自車両と障害物の相対速度は例えば算出された距離を時間微分することによって算出することができる。
In step 12, the
ステップ13(S13)において、回避軌道生成部34は、接触予測時間Tttcが予め設定された第1の判定時間Tth1以下であるか否かを判別する。このステップ13において肯定判定された場合、すなわち、接触予測時間Tttcが第1の判定時間Tth1以下である場合には、ステップ14(S14)に進む。一方、ステップ13において否定判定された場合、すなわち、接触予測時間Tttcが第1の判定時間Tth1以下でない場合には、ステップ10の処理に戻る。
In step 13 (S13), the avoidance
接触予測時間Tttcが第1の判定時間Tth1以下でない場合、換言すれば、自車両が障害物に接触するまでの時間が比較的長い場合には、一般に、その後の運転者による車両操作によって障害物との接触が回避される可能性がある。したがって、接触を回避するための走行制御を実行する必要性がなくなる可能性が高い。これより、走行制御を実行する必要性がないようなシーンであるにも係わらず、後述する走行制御が実行されることを抑制する。そのため、コントローラ30の処理負荷の低減を図ることができる。そのため、ステップ13の判定処理では、このような判断を行うための第1の判定時間Tth1が、実験やシミュレーションを通じて設定されている。
If the predicted contact time Tttc is not less than or equal to the first determination time Tth1, in other words, if the time until the host vehicle is in contact with the obstacle is relatively long, the obstacle is generally caused by subsequent vehicle operation by the driver. May be avoided. Therefore, there is a high possibility that there is no need to execute travel control for avoiding contact. As a result, it is possible to suppress the execution of travel control, which will be described later, even though the scene does not require execution of travel control. Therefore, the processing load on the
ステップ14において、回避軌道生成部34は、検出された障害物と、検出された自車両の運動状態とに基づいて、障害物との接触を回避するための走行軌道を回避軌道として複数生成(算出)する。本実施形態において、回避軌道生成部34は、操舵によって障害物との接触を回避する回避軌道をそれぞれ生成する。具体的には、図4に示すように、左方向への操舵によって障害物との接触を回避する回避軌道R1と、右方向への操舵によって障害物との接触を回避する回避軌道R2とをそれぞれ生成する。同図において、「C」は自車両を示し、「O」は矢印方向(軌道直交方向)に移動する障害物を示す。
In step 14, the avoidance
個々の回避軌道R1,R2を生成する場合、回避軌道生成部34は、自車両の運動状態と自車両のタイヤ特性とに基づいて、障害物との接触を回避するために自車両に付与すべき横加速度を設定する。そして、回避軌道生成部34は、設定された横加速度によって障害物との接触を回避できるか否かを判断する。回避軌道生成部34は、横加速度により接触を回避可能と判断した場合には、当該横加速度に対応する回避軌道を走行路の範囲内で算出する。この場合、回避軌道生成部34は、走行路の範囲から外れる回避軌道は生成しない。一方、回避軌道生成部34は、横加速度により接触を回避できないと判断した場合には、回避軌道を生成しない。
When generating the individual avoidance tracks R1 and R2, the avoidance
ステップ15(S15)において、回避軌道選択部35は、運転者による何らかの操作があったか否かを判断する。回避軌道選択部35は、運転操作検出部33において検出される操作量、具体的には、操舵角を参照して、運転者による操舵操作が行われたか否かを判断する。操舵操作の有無の判断方法は、例えば、ステップ14において回避軌道が算出されたタイミングにおける操舵角から、左右いずれの方向に操舵角が変化したか否かを検出するといった如くである。また、単に操舵方向だけでなく、回避軌道が算出されたタイミングにおける操舵角を基準として、操舵角変化が所定のしきい値以上生じたか否かを判断してもよい。さらに、操舵角変化の代わりに、操舵角速度または操舵角加速度が所定のしきい値以上変化したことを判断してもよい。このステップ15において否定判定された場合、すなわち、運転者による操作がない場合には、ステップ16(S16)に進む。一方、ステップ15において肯定判定された場合、すなわち、運転者による操作があった場合には、ステップ17(S17)に進む。
In step 15 (S15), the avoidance
ステップ16において、回避軌道選択部35は、ステップ12の処理により算出された接触予測時間Tttcが、接触予測時間Tth2以上であるか否かを判断する。ここで、図4の地点P1,P2に示すように、各回避軌道に追従する走行制御を行うための制御開始地点は、回避軌道に応じて異なる。上述の接触予測時間Tth2は、制御開始地点が障害物から最も近い位置となる回避軌道について、その制御開始地点に車両が到達した際の接触予測時間である(図4に示す例では、地点P2における接触予測時間)。このステップ16において肯定判定された場合、すなわち、接触予測時間Tttcが接触予測時間Tth2以上である場合には、ステップ15の処理に戻る。一方、ステップ16において否定判定された場合、すなわち、接触予測時間Tttcが接触予測時間Tth2よりも小さい場合には、ステップ17の処理に進む。
In step 16, the avoidance
ステップ17において、回避軌道選択部35は、生成されている複数の回避軌道のなかから、回避軌道を選択する。具体的には、回避軌道選択部35は、運転者によって操作が行われている場合には、複数の回避軌道R1,R2の中から、運転者の操作に適合する回避軌道を選択する。例えば、運転者によって右方向の操舵が行われている場合には、右方向の操舵に適合する回避軌道R2を選択するといった如くである。一方、運転者によって操作が行われていない場合には、運転者が操作を開始する地点が、いずれの回避軌道R1,R2に関する制御開始地点P1,P2よりも障害物に近い状態となる。そこで、回避軌道選択部35は、複数の回避軌道R1,R2の中から、制御開始地点P1,P2が最も障害物に近い回避軌道を選択する。
In step 17, the avoidance
ステップ18(S18)において、走行制御部39は、選択された回避軌道に基づいて、走行制御を開始する。具体的には、走行制御部39は、走行制御部39は、操舵アクチュエータ40の制御を開始する。
In step 18 (S18), the traveling
ステップ19(S19)において、走行制御部39は、選択された回避軌道に基づいて、例えば2輪モデルを用いて、車両が回避軌道に追従するための目標操舵角を算出する。そして、走行制御部39は、目標操舵角と現在の操舵角との偏差(操舵角偏差)を検知し、この操舵角偏差を減少させるための制御量として、操舵アクチュエータ40に対する指令トルクを算出する。なお、目標操舵角に追従するような指令トルクの算出方法に関して、様々な方法が挙げられ、本願の出願時点で既に公知であるので詳細な説明を省略する。なお、目標操舵角の算出方向は、選択された回避軌道から、車両のヨーレートセンサ23と車輪速センサ25からの入力情報のみを利用して、目標操舵角を近似的に算出してもよい。また、選択された回避軌道は、最初から目標操舵角であってもよい。
In step 19 (S19), the
ステップ20(S20)において、リスク演算部36は、障害物の検出結果および車両の運動状態の検出結果に基づいて、選択された回避経路に対応するリスクを演算する。このリスクは、上述した通り、軌道直交方向に延在する所定範囲における障害物との接触可能性を示す指標であり、前方に障害物がない範囲において小さい値となり、前方に障害物がある範囲において大きい値となるように設定される。例えば、正規化したリスクを用いた場合、障害物がない範囲におけるリスクは0が設定され、障害物がある範囲におけるリスクは1が設定される。その間の範囲においては、例えば、図7(a),(b)に示すように、「0」と「1」との間を適宜に結ぶようにリスクを設定してもよい。
In step 20 (S20), the
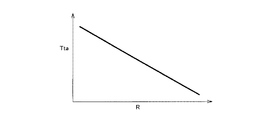
ステップ21(S21)において、制御抑制部37は、障害物検出部31の検出結果を利用して、障害物に対する車両の相対位置を算出する。そして、制御抑制部37は、演算したリスクの位置関係と比較して現在のリスクを求め、このリスクに基づいて制御量、具体的には、ステップ19で算出した指令トルクに対する補正量(具体的には、ステップ19の指令トルクを抑制するための補正量)を算出する。具体的には、制御抑制部37は、リスクが低い程、目標操舵角へ追従する指令トルクが弱くなるように、指令トルクに対する補正量を大きく算出する。これにより、リスクが低いシーンでは、運転者は車両の軌道を自ら修正可能となる。一方、制御抑制部37は、リスクが高い程、目標操舵角へ追従する指令トルクが弱くならないように、指令トルクに対する補正量を小さく算出する。リスクが高いシーンでは、運転者は車両の軌道を修正することが困難となる。このような観点から、指令トルクに対する補正量は、リスクの増加に応じて小さくなるような関係に設定されている。例えば、図6に示すように、指令トルクに対する補正量(Tta)は、リスク(R)に応じて線形的に変化するようなものであってもよい。また、図7(a)に示すように、指令トルクに対する補正量(Tta)は、リスク(R)に応じて非線形的に変化するが、反比例的に変化することで、上述の条件を満たすものであってもよい。また、図7(b)に示すように、指令トルクに対する補正量(Tta)は、あるリスク(R)の範囲では一定の補正量であるが、これがリスクの増加とともに段階的に小さくなるようなものであってもよい。
In step 21 (S21), the
ステップ22(S22)において、操舵反力調整部38は、選択された回避軌道に対する車両の追従状況を運転者に認識させるべく、ステップ19で算出した指令トルクに対する補正量(具体的には、操舵反力を調整するための補正量(制御量))を算出する。通常に、走行制御部39は、車輪の操舵角が目標操舵角と対応した時の回転位置を基準位置として、この基準位置からの操舵角の増加に応じて操舵反力が増加するように操舵反力を制御している。操舵反力調整部38は、ステップ19の演算における目標操舵角に対して現在の操舵角の偏差(操舵角偏差)が大きい程、基準位置からの操舵角の増加に応じた操舵反力の増加量が通常時よりも大きくなるように補正量を演算する。これにより、操舵角偏差が大きい場合には、選択された回避軌道から外れることを運転者に認識させることができる。一方、操舵角偏差が小さい場合には、操舵反力が通常時のそれと比較して大きくなりすぎることがない。そのため、運転者に自由な操舵操作を許容できるので、運転者が覚える違和感を低減することができる。このような観点から、操舵反力は、車輪の操舵角が目標操舵角と対応した時の回転位置を基準位置として、目標操舵角に対する偏差に対し比例関係となるように設定されている。例えば、図8に示すように、操舵反力は、目標操舵角の偏差に応じて線形的に変化するような関係であってもよい。
In step 22 (S22), the steering reaction
ステップ23(S23)において、走行制御部39は、ステップ19において演算された指令トルクと、ステップ21,22においてそれぞれ演算された補正量とに基づいて、最終的な指令トルクを算出する。具体的には、走行制御部39は、指令トルクと、各補正量とを加算することにより、最終的な指令トルクを演算する。そして、走行制御部39は、最終的な指令トルクから、アシストモータを駆動するために必要な指令電流に変換し、これを制御指令として操舵アクチュエータ40に出力する。操舵アクチュエータ40が制御指令に応じて動作することにより、操舵制御が行われる。
In step 23 (S23), the
ステップ24(S24)において、障害物検出部31は、障害物に対する回避が終了し、障害物との接触の可能性がなくなったか否かを判断する。このステップ24において肯定判定をされた場合、すなわち、接触の可能性が無いと判断された場合には、ステップ10へ戻る。この場合、走行制御部39は、回避軌道選択部35が選択した回避軌道に車両を追従させる走行制御を終了する。一方、ステップ24において否定判定をされた場合、すなわち、接触の可能性があると判断された場合には、ステップ19に示す処理に戻る。
In step 24 (S24), the
このように本実施形態において、リスク演算部36は、選択された回避軌道を処理対象として、回避軌道と略直交方向に延在する所定範囲における障害物との接触可能性をリスクとして演算する。また、制御抑制部37は、演算されるリスクに応じて、走行制御部39による走行制御を抑制する。また、操舵反力調整部38は、選択された回避軌道に対する自車両の走行状況(具体的には、操舵角偏差)に応じて、運転者の操舵操作に対する操舵反力を調整する。
As described above, in the present embodiment, the
かかる構成によれば、実際の軌道と、選択した回避軌道とに偏差が生じていても、リスクが小さい場合には、制御抑制量が大きくなるので、走行制御による操舵介入量が小さくなる。そのため、運転者自身が認識する外界の状況に応じた運転者の操舵と、制御介入による操舵との間に生じるギャップが抑制される。これにより、運転者が覚える違和感の低減を図ることができる。また、このような違和感を低減した走行制御を行った場合でも、選択された回避軌道に対する自車両の走行状況に応じて、操舵反力を付与することで、ハンドルを介して運転者に回避軌道を認識させることができる。また、運転者の操作を違和感が小さい回避軌道に誘導して、運転者の操作介入量を増やすことができる。 According to this configuration, even if there is a deviation between the actual trajectory and the selected avoidance trajectory, the amount of control suppression increases when the risk is small, so the steering intervention amount due to travel control decreases. Therefore, a gap generated between the steering of the driver according to the external situation recognized by the driver and the steering by the control intervention is suppressed. Thereby, it is possible to reduce the uncomfortable feeling that the driver learns. Further, even when the travel control with such a sense of incongruity is performed, the avoidance trajectory is provided to the driver via the steering wheel by applying a steering reaction force according to the traveling state of the vehicle with respect to the selected avoidance trajectory. Can be recognized. In addition, the amount of intervention by the driver can be increased by guiding the driver's operation to an avoidance trajectory with a small discomfort.
また、本実施形態において、走行制御部39は、選択された回避軌道に基づいて、車両が回避軌道に追従するための目標操舵角を算出し、算出された目標操舵角と現在の車輪の操舵角との操舵角偏差を減少させるための指令トルク(制御量)を算出する。そして、走行制御部39は、この算出された指令トルクに基づいて、自車両を走行制御する。かかる構成によれば、偏差に対応する指令トルクを与えるため、指令トルクの絶対値を小さくすることができ、運転者が覚える違和感を低減することができる。また、制御抑制部37により走行制御が抑制された状態においては、車両は緩やかに選択された回避軌道に近づくことになる。このため、運転者は、操舵操作子(ハンドル)を介して、1本の目標とする回避軌道に向かって違和感なく誘導されていると感じ、安心感を得ることができる。
In the present embodiment, the
また、本実施形態において、操舵反力調整部38は、操舵角偏差が大きい程、基準位置からの操舵角の増加に応じた操舵反力の増加がさらに大きくなるような調整を行っている。かかる構成によれば、運転者は、操舵反力から直感的に回避経路を認識することができる。そのため、運転者に違和感を覚えさせることなく、運転者の操作を回避軌道へ誘導することができる。また、操舵反力は目標操舵角からの偏差に応じて増加するため、運転者がパニックに陥ってしまうような状況であっても不要な操舵操作を抑制することができる。
In the present embodiment, the steering reaction
なお、本実施形態では、ステップ10の処理において、走行路内に存在する物体を障害物として検出していたが、走行路内か否かを考慮せず、例えば自車両前方の所定の領域内に存在する物体を障害物として検出してもよい。
In the present embodiment, in the processing of
また、ステップS14で操舵反力を算出するために、ステップ20において算出されるリスクを用いてもよい。この場合、リスクの低い範囲では、操舵反力を小さくし、またはパワーステアリング特性が持っている操舵反力に設定してもよい。一方、リスクの高い範囲では、操舵反力を非常に大きくし、運転者が操舵しにくくすることで、運転者のミスによる操舵操作を抑制するようにしてもよい。
Further, the risk calculated in
(第2の実施形態)
図9は、第2の実施形態にかかる車両の走行制御装置10の構成を示すブロック図である。本実施形態にかかる車両の走行制御装置10およびその制御方法が、第1の実施形態のそれと相違する点は、走行制御として操舵制御のみならず制動制御を行うことである。なお、第1の実施形態と重複する説明は省略することとし、以下相違点を中心に説明を行う。本実施形態において、車両の走行制御装置10には、第1の実施形態に示す構成に加え、ブレーキアクチュエータ41が追加されている。ブレーキアクチュエータ41は、例えば、車両のホイールシリンダに供給される制動液圧を制御するアクチュエータであり、このブレーキアクチュエータ41を制御することにより、車輪に制動力を発生させて車両の制動動作を行うことができる。
(Second Embodiment)
FIG. 9 is a block diagram showing the configuration of the vehicle
図10は、第2の実施形態にかかる走行制御方法を示すフローチャートである。本実施形態の制御方法では、第1の実施形態と比較して、ステップ25(S25)の処理が、ステップ19の処理とステップ20の処理との間に追加的に実行される。
FIG. 10 is a flowchart illustrating a travel control method according to the second embodiment. In the control method of this embodiment, the process of step 25 (S25) is additionally executed between the process of step 19 and the process of
ステップ25において、走行制御部39は、車両が目標操舵角に追従することで、障害物を回避するのに必要な横力やヨーレートに妨げない程度に、必要な減速度を設定する。走行制御部39は、設定された減速度に必要な液圧指令値を演算し、これを制御指令としてブレーキアクチュエータ41に出力する。ブレーキアクチュエータ41が制御指令に応じて動作することにより、制動制御が行われる。
In
このようの本実施形態によれば、制動制御を加えることにより、障害物を回避するための走行制御をより有効に行うことができる。 According to the present embodiment as described above, by applying the braking control, it is possible to more effectively perform the traveling control for avoiding the obstacle.
なお、ステップ25の処理では、ブレーキアクチュエータ41の液圧指令値をアクチュエータが許容する最大指令値値圧に設定しもよい。また、ブレーキアクチュエータ41の液圧指令値は減速をさせるために、ある一定値に設定してもよい。
In the process of
(第3の実施形態)
第3の実施形態にかかる車両の走行制御装置10およびその制御方法が、第1の実施形態のそれと相違する点は、操舵反力を演算する際の手法である。なお、第1の実施形態と重複する説明は省略することとし、以下相違点を中心に説明を行う。本実施形態において、車両の走行制御装置10の構成は、第1の実施形態と同様である。
(Third embodiment)
The vehicle
図11は、第3の実施形態にかかる走行制御方法を示すフローチャートである。本実施形態の制御方法では、第1の実施形態と比較して、ステップ26(S26)の処理が追加されており、この処理がステップ19からステップ21までの処理と並列的に実行される。 FIG. 11 is a flowchart illustrating a travel control method according to the third embodiment. In the control method of this embodiment, the process of step 26 (S26) is added compared with 1st Embodiment, This process is performed in parallel with the process from step 19 to step 21. FIG.
ステップ26(S26)において、走行制御部39は、運転操作検出部33によって検出される操舵トルクセンサ27からの入力情報を利用して、運転者の操舵状況に応じて操舵反力を調整する。具体的に、操舵トルクセンサ27によって検出される操舵トルクが大きい場合、運転者は積極的にハンドル操作を行っているか、もしくは、目標操舵角と比して十分に大きい操舵操作をしたいことが考えられる。そこで、走行制御部39は、これに応じて操舵反力を弱くする。これにより、運転者によるハンドル操作のしやすさの向上を図ることができる。一方、操舵トルクセンサ27によって検出される操舵トルクが小さい場合、運転者はあまりハンドル操作をしていないか、もしくは、目標操舵角とほとんど一致する操舵操作をしていることが考えられる。そこで、走行制御部39は、これに応じて操舵反力を強くする。これにより、運転者がハンドルの安定感を得ることができる。
In step 26 (S26), the
なお、ステップ26では、操舵トルクセンサ27に対する操舵反力の変化を参照しているが、追加情報として車輪速センサ25からの入力情報も利用してもよい。例えば、車輪速の増加に応じて操舵反力も大きくすることで、高速におけるハンドルの安定感を実現することができる。これにより、高速走行における安定感を運転者に伝えることができる。
In
なお、上述した各実施形態において、コントローラ30の障害物検出部31は、自車両の前方に存在する障害物を検出する機能を担うものであるが、広義において、レーダ20、カメラ21および画像処理装置22も同様の機能を担う手段として機能する。また、運動状態検出部32は、自車両の運動状態を検出する機能を担うものであるが、広義において、ヨーレートセンサ23、Gセンサ24、車輪速センサ25も同様の機能を担う手段として機能する。さらに、操作量検出部33は、運転者による自車両の操作を検出する機能を担うものであるが、広義において、操舵角センサ26および操舵トルクセンサ27も同様の機能を担う手段として機能する。
In each embodiment described above, the
10…走行制御装置
20…レーダ
21…カメラ
22…画像処理装置
23…ヨーレートセンサ
24…Gセンサ
25…車輪速センサ
26…操舵角センサ
27…操舵トルクセンサ
30…コントローラ
31…障害物検出部
32…運動状態検出部
33…運転操作検出部
34…回避軌道生成部
35…回避軌道選択部
36…リスク演算部
37…制御抑制部
38…操舵反力調整部
39…走行制御部
40…操舵アクチュエータ
40,41…アクチュエータ
41…ブレーキアクチュエータ
DESCRIPTION OF
Claims (9)
自車両の運動状態を検出する運動状態検出手段と、
前記自車両の運動状態を参照して、前記障害物に自車両が接触することを回避するための回避軌道を複数生成する回避軌道生成手段と、
運転者による自車両の操作を検出する運転操作検出手段と、
前記複数の回避軌道の中から、前記運転者による自車両の操作に適合する回避軌道を選択する回避軌道選択手段と、
前記回避軌道選択手段によって選択された回避軌道に基づいて自車両を走行制御する走行制御手段と、
前記選択された回避軌道を処理対象として、前記障害物検出手段および前記運動状態検出手段の検出結果に基づいて、当該回避軌道と略直交方向に延在する所定範囲における前記障害物との接触可能性をリスクとして演算するリスク演算手段と、
前記リスク演算手段によって演算されるリスクが小さいほど、前記走行制御手段による走行制御を抑制する抑制手段と、
前記選択された回避軌道に対する自車両の走行状況に応じて、運転者の操舵操作に対する操舵反力を調整する操舵反力調整手段と
を有することを特徴とする車両の走行制御装置。 Obstacle detection means for detecting obstacles existing in front of the host vehicle;
Motion state detection means for detecting the motion state of the host vehicle;
An avoidance trajectory generating means for generating a plurality of avoidance trajectories for avoiding contact of the own vehicle with the obstacle with reference to the motion state of the own vehicle;
Driving operation detection means for detecting operation of the vehicle by the driver;
An avoidance trajectory selection means for selecting an avoidance trajectory suitable for the operation of the vehicle by the driver from the plurality of avoidance trajectories;
Travel control means for traveling control of the host vehicle based on the avoidance trajectory selected by the avoidance trajectory selection means;
Based on the detection results of the obstacle detection means and the motion state detection means, the selected avoidance trajectory can be contacted with the obstacle in a predetermined range extending in a direction substantially orthogonal to the avoidance trajectory. Risk calculation means for calculating sex as a risk,
The smaller the risk calculated by the risk calculation means, the lower the suppression means for suppressing the travel control by the travel control means,
A vehicle travel control device comprising: a steering reaction force adjusting means for adjusting a steering reaction force with respect to a driver's steering operation in accordance with a traveling state of the host vehicle with respect to the selected avoidance track.
前記操舵反力調整手段は、前記操舵角偏差が大きい程、基準位置からの操舵角の増加に応じた操舵反力の増加がさらに大きくなるように、前記走行制御手段による操舵反力の調整を行うことを特徴とする請求項2に記載された車両の走行制御装置。 The travel control means uses the rotational position when the steering angle of the wheel corresponds to the target steering angle as a reference position, and the steering reaction force so that the steering reaction force increases as the steering angle increases from the reference position. Control
The steering reaction force adjusting means adjusts the steering reaction force by the travel control means so that the greater the steering angle deviation, the greater the increase in the steering reaction force according to the increase in the steering angle from the reference position. The vehicle travel control device according to claim 2, wherein the vehicle travel control device is performed.
前記運転操作検出手段によって運転者による左方向への操舵操作が検出された場合、左方向への操舵によって障害物との接触を回避する回避軌道を選択することを特徴とする請求項6に記載された車両の走行制御装置。 The avoidance trajectory selecting means selects an avoidance trajectory that avoids contact with an obstacle by steering in the right direction when a steering operation in the right direction by the driver is detected by the driving operation detection means,
7. The avoidance trajectory that avoids contact with an obstacle by leftward steering is selected when the leftward steering operation by the driver is detected by the driving operation detection unit. Vehicle travel control device.
前記複数の回避軌道の中から、運転者による自車両の操作に対応する回避軌道を選択し、
回避軌道を処理対象として、前記障害物および車両の運動状態に基づいて、当該回避軌道と略直交方向に延在する所定範囲における前記障害物との接触可能性をリスクとして演算し、
前記選択された回避軌道に基づいて自車両を走行制御しており、当該走行制御の際に、演算されたリスクが小さいほど走行制御を抑制するとともに、前記走行制御に応じて運転者の操舵操作に対する操舵反力を調整することを特徴とする車両の走行制御方法。 With reference to the motion state of the vehicle, the avoidance path for avoiding the host vehicle contacts the obstacles generates a plurality,
From among the plurality of avoidance trajectories, select the avoidance route corresponding to the operation of the vehicle by the OPERATION person,
Based on the obstacle and the motion state of the vehicle, the avoidance trajectory is a processing target, and the possibility of contact with the obstacle in a predetermined range extending in a direction substantially orthogonal to the avoidance trajectory is calculated as a risk.
The host vehicle is travel-controlled based on the selected avoidance path, and the travel control is suppressed as the calculated risk is smaller during the travel control, and the driver's steering operation is performed according to the travel control. A vehicle travel control method comprising adjusting a steering reaction force against the vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009134093A JP5531455B2 (en) | 2009-06-03 | 2009-06-03 | Vehicle travel control device and vehicle travel control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009134093A JP5531455B2 (en) | 2009-06-03 | 2009-06-03 | Vehicle travel control device and vehicle travel control method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010280276A JP2010280276A (en) | 2010-12-16 |
| JP5531455B2 true JP5531455B2 (en) | 2014-06-25 |
Family
ID=43537453
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009134093A Active JP5531455B2 (en) | 2009-06-03 | 2009-06-03 | Vehicle travel control device and vehicle travel control method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5531455B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108973997A (en) * | 2017-06-02 | 2018-12-11 | 本田技研工业株式会社 | Running rail determination device and servomechanism |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5803061B2 (en) * | 2010-06-16 | 2015-11-04 | 日産自動車株式会社 | Collision avoidance support device |
| US9139174B2 (en) * | 2011-09-26 | 2015-09-22 | Toyota Jidosha Kabushiki Kaisha | Vehicular driving support system |
| JP6535482B2 (en) * | 2015-03-02 | 2019-06-26 | 株式会社Subaru | Vehicle travel control system |
| US11572096B2 (en) | 2019-06-28 | 2023-02-07 | Nissan Motor Co., Ltd. | Steering control method and steering control device |
| CN114475584B (en) * | 2022-02-28 | 2023-11-28 | 中国第一汽车股份有限公司 | Obstacle avoidance control method and device for vehicle, automobile and storage medium |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000198458A (en) * | 1999-01-08 | 2000-07-18 | Mazda Motor Corp | Control device of vehicle |
| JP4476781B2 (en) * | 2004-11-05 | 2010-06-09 | 本田技研工業株式会社 | Vehicle travel safety device |
| JP5309582B2 (en) * | 2007-05-11 | 2013-10-09 | 日産自動車株式会社 | Vehicle traveling control method and traveling control device |
-
2009
- 2009-06-03 JP JP2009134093A patent/JP5531455B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108973997A (en) * | 2017-06-02 | 2018-12-11 | 本田技研工业株式会社 | Running rail determination device and servomechanism |
| CN108973997B (en) * | 2017-06-02 | 2021-07-16 | 本田技研工业株式会社 | Travel track determination device and automatic steering device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010280276A (en) | 2010-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1990250B1 (en) | Vehicle running control method for avoiding that a vehicle collides with an obstacle | |
| JP4865727B2 (en) | Method for maneuvering vehicle in parking area and parking assist device | |
| JP5783204B2 (en) | Driving support device and driving support method | |
| JP5532684B2 (en) | Vehicle travel control device and vehicle travel control method | |
| JP6515754B2 (en) | Steering reaction force control device for vehicle | |
| JP2011005893A (en) | Vehicular travel control device, and vehicular travel control method | |
| US9937954B2 (en) | Steering reaction force control apparatus for vehicle | |
| JP5609320B2 (en) | Obstacle avoidance support device and obstacle avoidance support method | |
| JP5531455B2 (en) | Vehicle travel control device and vehicle travel control method | |
| JP5853552B2 (en) | Vehicle travel control device | |
| JP5299756B2 (en) | vehicle | |
| JP2017061284A (en) | Vehicular operation support apparatus | |
| JP2016203668A (en) | Steering device | |
| JPWO2014064805A1 (en) | Vehicle travel support device | |
| JP2007125959A (en) | Steering device for vehicle | |
| JP5386873B2 (en) | Vehicle steering apparatus and vehicle steering method | |
| JP2010188884A (en) | Device and method for supporting lane keeping | |
| JP2009226981A (en) | Lane deviation preventive apparatus | |
| JP5135952B2 (en) | Driving support device and driving support method | |
| CN112172913A (en) | Steering assist device for vehicle | |
| JP2003058993A (en) | Lane deviation warning device | |
| JP2009101809A (en) | Vehicular driving support device | |
| JP6082319B2 (en) | Vehicle lane keeping control device | |
| WO2020166092A1 (en) | Vehicle control device and vehicle control method | |
| JP6637553B1 (en) | Vehicle control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130709 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130711 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130903 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140325 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140407 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5531455 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |