JP5853552B2 - Vehicle travel control device - Google Patents
Vehicle travel control device Download PDFInfo
- Publication number
- JP5853552B2 JP5853552B2 JP2011216247A JP2011216247A JP5853552B2 JP 5853552 B2 JP5853552 B2 JP 5853552B2 JP 2011216247 A JP2011216247 A JP 2011216247A JP 2011216247 A JP2011216247 A JP 2011216247A JP 5853552 B2 JP5853552 B2 JP 5853552B2
- Authority
- JP
- Japan
- Prior art keywords
- lane
- steering
- lateral position
- vehicle
- host vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 36
- 230000033001 locomotion Effects 0.000 claims description 32
- 238000000034 method Methods 0.000 description 24
- 230000008569 process Effects 0.000 description 20
- 238000012937 correction Methods 0.000 description 13
- 230000007246 mechanism Effects 0.000 description 10
- 230000001133 acceleration Effects 0.000 description 9
- 238000013459 approach Methods 0.000 description 7
- 230000000694 effects Effects 0.000 description 7
- 238000012544 monitoring process Methods 0.000 description 7
- 230000009471 action Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000003550 marker Substances 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images






Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
- Traffic Control Systems (AREA)
Description
本発明は、車両の走行を制御する装置に関する。 The present invention relates to an apparatus for controlling traveling of a vehicle.
従来、自車両が車線に追従して走行するように運転者を支援する車線追従制御を行う車両用走行制御装置が知られている。例えば、特許文献1に記載の技術は、車線追従制御中に、走行車線内での自車両の軌道を修正する等の目的で運転者の操舵操作が介入した場合、走行目標点を走行車線内での自車両の横方向位置の変動に合わせて更新することで、スムーズに自車両の軌道の修正等を行うことを可能にし、運転者の違和感の軽減を図っている。
2. Description of the Related Art Conventionally, a vehicular travel control device that performs lane tracking control for assisting a driver so that the host vehicle travels following a lane is known. For example, in the technique described in
しかし、上記従来の装置は、操舵操作の介入により運転者が車線外側から車線中央寄りに向かうことを意図している場合、運転者が操舵操作の細かい微調整を行う必要があり、操舵操作が安定していないと自車両の位置がふらついてしまうおそれがある。よって、車線中央への復帰が容易でなく、運転者の操舵操作の負担が増大する、という問題があった。 However, when the driver intends to move from the outside of the lane toward the center of the lane due to the intervention of the steering operation, the driver needs to make fine adjustments to the steering operation. If it is not stable, the position of the host vehicle may fluctuate. Therefore, there is a problem that it is not easy to return to the center of the lane and the burden on the steering operation of the driver increases.
本発明は、上記問題に着目してなされたもので、車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供することを目的とする。 The present invention has been made paying attention to the above problem, and during the lane tracking control, when the driver performs the steering operation for the purpose of moving toward the center of the lane, the burden of the steering operation of the driver is reduced. An object of the present invention is to provide a vehicular travel control device that can be reduced.
上記目的を達成するため、本発明の一実施形態に係る車両用走行制御装置では、車線追従制御中、運転者の操舵状態に基づき運転者の車線中央への復帰意図があると判定すると、走行目標点を車線中央に設定することとした。
To achieve the above object, in the vehicle control system according to an embodiment of the present invention, in the lane keeping control, if it is determined that there is a return intention to lane center of the driver based on the steering state of the driver The driving target point was set at the center of the lane.
よって、判定した復帰意図に応じて走行目標点を車線中央に設定するため、運転者が操舵操作の細かい微調整を行う必要がなく、より容易に自車両を車線中央寄りに向かわせることができ、運転者の操舵操作の負担を軽減することができる。 Therefore, since the travel target point is set at the center of the lane according to the determined return intention, it is not necessary for the driver to make fine adjustments to the steering operation, and the host vehicle can be more easily directed toward the center of the lane. The burden of the driver's steering operation can be reduced.
[実施例1]
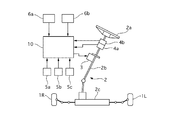
実施例1の車両用走行制御装置は、走行車線に自車両を追従させる車線追従制御を行うものであり、そのために操舵トルクを操舵力伝達系に与えて操舵制御を行う。まず、構成を説明する。図1は、実施例1の車両用走行制御装置が適用される車両の操舵システムの概略構成図である。図1に示すように、車両の前輪1L、1Rには、ステアリングギア2cを有する操舵機構2が配設されている。ステアリングギア2cは一般的なラック&ピニオン式であり、操舵機構2は、前輪1L、1Rの操舵軸に接続されるラックと、これに噛合するピニオンと、このピニオンをステアリングホイール2aに与えられる操舵トルクで回転させるステアリングシャフト2bとを備えている。
[Example 1]
The vehicle travel control apparatus according to the first embodiment performs lane tracking control for causing the host vehicle to track the traveling lane. For this purpose, steering control is performed by applying a steering torque to a steering force transmission system. First, the configuration will be described. FIG. 1 is a schematic configuration diagram of a vehicle steering system to which the vehicle travel control apparatus according to the first embodiment is applied. As shown in FIG. 1, a
ステアリングシャフト2bにおけるピニオンの上部には、前輪1L、1Rを自動操舵するための自動操舵機構を構成する操舵アクチュエータ3が配設されている。操舵アクチュエータ3は、ステアリングシャフト2bと同軸に取り付けられたドリブンギヤと、これに噛合するドライブギヤと、このドライブギヤを回転駆動する自動操舵用モータとから構成されており、操舵機構2に操舵力を発生させることが可能に設けられている。コントロールユニット10からの駆動信号に応じて操舵アクチュエータ3が自動操舵用モータを駆動することにより、操舵機構2が制御されて操舵が行われる。なお、自動操舵用モータとドライブギヤとの間にはクラッチ機構が介挿されており、自動操舵制御時にのみクラッチ機構が締結され、そうでないときにはクラッチ機構が非締結状態となって自動操舵用モータの回転力がステアリングシャフト2bに入力されないように構成されている。
A
ステアリングシャフト2bには、運転者(ドライバ)の操舵操作の状態を示すパラメータである操舵状態量(操舵トルクT、操舵角θ)を検出する各センサが設けられている。具体的には、ステアリングホイール2aと操舵アクチュエータ3との間に、運転者のステアリングホイール2aの操作によりステアリングシャフト2bに入力される操舵トルクTを検出する操舵トルクセンサ4aと、ステアリングシャフト2bの回転角からステアリングホイール2aの操舵角θを検出する操舵角センサ4bが備えられ、それらの検出信号はコントロールユニット10に出力される。
The
車両には、車両の運動の状態を示すパラメータである車両運動状態量を検出する各センサが設けられている。具体的には、自車両MCに発生する横加速度Gyを検出する横加速度センサ5a、自車両MCに発生するヨーレートψ'を検出するヨーレートセンサ5b、車輪の回転数や変速機の出力側の回転数を検出することにより自車両MCの車速Vを検出する車速センサ5cが備えられ、それらの検出信号はコントロールユニット10に出力される。なお、車両運動状態量を検出する各センサの代わりに、車両運動状態量を推定する手段を設けてもよい。例えば、横加速度センサ5aを設ける代わりに、車速Vと操舵角θにより横加速度Gyを推定演算してもよい。
The vehicle is provided with each sensor for detecting a vehicle motion state amount that is a parameter indicating the motion state of the vehicle. Specifically, a
車両には、走行車線(自車両MCが走行する車線)l1内の自車両MCの位置(走行位置)を検出するための前方外界認識センサとして、前方監視カメラ6aが備えられている。前方監視カメラ6aは、例えばCCDカメラ等で構成される単眼カメラであり、自車両MC前方の数m〜数10m先の走行路を撮影できるように構成されている。前方監視カメラ6aの撮影画像はコントロールユニット10に出力される。また、車両には、自車両MCの周囲の立体物(障害物)を検出し、この立体物(障害物)の自車両MCへの接近度合い(距離)を検出するための前方外界認識センサとして、レーザーレーダ6bが備えられている。レーザーレーダ6bの検出信号はコントロールユニット10に出力される。なお、レーザーレーダに限らず、ステレオカメラ等を用いてもよい。
The vehicle is provided with a
コントロールユニット10は、供給される各検出信号や各算出値に基づき、走行路において自車両MCが走行すべき目標軌跡M*を算出する。また、自車両MCが目標軌跡M*に沿って走行するために必要な目標操舵角θ*を算出し、操舵角センサ4bで検出した実操舵角θが目標操舵角θ*に一致するように、操舵アクチュエータ3に駆動信号を出力して、車両の転舵輪である前輪1L、1Rに舵角を発生させる。なお、目標軌跡M*に沿って走行するための目標操舵トルクT*を求め、操舵アクチュエータ3の自動操舵用モータへ供給する電流を制御して、ステアリングシャフト2bに発生する操舵トルクTが目標操舵トルクT*に一致するように制御することとしてもよい。
The
図2は、コントロールユニット10内に設けられた制御システムの概略構成を示すブロック線図である。図2に示すように、コントロールユニット10は、車線認識部101と、操舵トルク検出部102と、操舵角検出部103と、車両運動状態検出部104と、障害物認識部105と、ドライバ介入判定部106と、車線中央復帰意図判定部107と、目標軌跡算出部108と、目標横位置設定部109と、操舵制御部110とを有する。
FIG. 2 is a block diagram showing a schematic configuration of a control system provided in the
車線認識部101は、前方監視カメラ6aが撮影した自車両MC前方の画像から、例えば自車両MC近傍の白線等のレーンマーカ(車線区分線ln)を検出して走行車線l1を認識すると共に、走行車線l1(具体的には車線区分線lnの接線)に対する自車両MCの向き(ヨー角φ)、走行車線l1における基準走行ラインに対する自車両MCの横方向位置(横位置Y)、および走行車線l1の道路曲率ρを算出する。
The
道路曲率ρの算出は、例えば以下のように行う。車線認識部101は、前方監視カメラ6aが撮影した画像から、まず、仮想的に実空間を設定し、その実空間上に自車両MCと、左右の車線区分線lnとを配置する。そして、原点は前方監視カメラ6aの中央位置の真下の道路面上の点として自車両MCの進行方向にx軸、進行方向に垂直の左右方向にy軸を取り、車線区分線lnを表す曲線を2次曲線すなわちy=ax2+bx+cの式で近似し、1/2aを自車両MCの位置における道路の曲率ρとして算出する。なお、2次曲線の近似方法は、例えば、車線区分線ln上の3点を抽出してその3点を通る2次曲線として求めてもよいし、車線区分線ln上の数点を抽出して最小自乗法により算出してもよい。
The road curvature ρ is calculated as follows, for example. The
横位置Yの算出は、例えば以下のように行う。車線認識部101は、前方監視カメラ6aが撮影した画像から、基準走行ラインとして用いることができる情報(例えば、路面に描かれたセンターラインやサイドライン、或いはガイドレール等)を抽出し、この抽出した情報に基づいて基準走行ラインを想定する。実施例1では、走行車線l1の中央部(車線中央lm)を基準走行ラインとし、この基準走行ライン(車線中央lm)からの自車両MCの横方向変位(横方向距離)を横位置Yとする。具体的には、上記仮想的な実空間に設定された自車両MCと基準走行ライン(車線中央lm)の配置に基づき、車線中央lmに対する自車両MC(原点)の横方向離間量から横位置Yを算出する。
The lateral position Y is calculated as follows, for example. The
操舵トルク検出部102は、操舵トルクセンサ4aからの入力に基づき、操舵状態量として操舵トルクTを検出する。操舵角検出部103は、操舵角センサ4bからの入力に基づき、操舵状態量として操舵角θを検出すると共に、操舵角θに基づき、操舵角速度(運転者の操舵速度)θ'を算出する。車両運動状態検出部104は、横加速度センサ5a、ヨーレートセンサ5b、車速センサ5cからの入力に基づき、車両の運動状態量として、横加速度Gy、ヨーレートψ'、車速Vを検出する。なお、検出される車両の走行状態データに左右の方向性がある場合には、左右どちらかの方向(例えば左方向)を予め正方向に設定することとしてもよい。例えば、ヨーレートψ'や横加速度Gy、操舵角θ、ヨー角φは、左旋回時に正値となり、横位置Yは、走行車線中央lmから左方にずれているときに正値となるようにする。
The
障害物認識部105は、レーザーレーダ6bの検出信号から、自車両MC周囲の立体物(自車両MCが走行する車線l1内やこれに隣接する車線l2内の他車両等)の自車両MCに対する位置(横方向位置x及び前後方向位置y)を検出し、これにより自車両MC周囲の道路の混雑状況を把握する。具体的には、自車両MCの前後の所定範囲内に存在する隣接車両の横方向(走行車線に対して垂直方向)位置xが所定値よりも小さいとき、混雑していると判断する。例えば、車線幅が狭くて走行車線l1と隣接車線l2との密集度が高い場合や、車線幅が広くても隣接車両が自車両MCの車線l1側に極端に近い場合がこれに該当する。また、自車両MCから周囲の立体物(他車両等の障害物)までの距離が短い(立体物の位置が自車両MCから所定範囲内である)とき、例えば縁石や側溝や壁などの道路境界物と自車両MCとの距離が短い場合や、駐停車車両が存在して自車両MCがこれに近づく場合や、対向車が自車両MCに接近する場合も、混雑していると判断する。
The
目標軌跡算出部108は、車線認識部101および目標横位置設定部109からの入力に基づき、自車両MCの走行目標点GPを設定し、この走行目標点GPに基づき自車両MCの目標走行ライン(目標軌跡M*)を算出する。具体的には、まず、後述する目標横位置設定部109により設定された、走行車線l1における自車両MCの目標横位置Y*(車線中央lmに対する自車両MCの横方向離間量の目標値)を読み込む。そして、自車両MCから前方に走行車線l1に沿う方向に所定距離L0だけ離れた地点Pにおいて、車線中央lmから目標横位置Y*だけ横方向に離間した位置に自車両MCが走行すべき走行目標点GPを設定する。本実施例1では、自車両MCの前方に所定距離L0だけ離れた上記地点Pとして、自車両MCが現在の車速Vで走行車線l1に沿って所定時間走行した場合の走行距離(前方注視点距離)だけ前方の地点を設定する。検出される走行車線l1(車線区分線lnや車線中央lm)がカーブしている場合も同様に、地点Pにおいて車線中央lmから目標横位置Y*だけ横方向に離間した位置に走行目標点GPを設定する。言換えると、目標横位置Y*を自車両MCから走行車線l1の方向に所定距離L0だけ延長した点を走行目標点GPとする。所定距離L0は、車速V、走行車線l1の幅や道路曲率ρ、および隣接する車両の接近度合いに応じて変更する。
The target trajectory calculation unit 108 sets a travel target point GP of the host vehicle MC based on inputs from the
走行目標点GPを設定すると、自車両MCが走行目標点GPに向かう経路を例えば円弧と仮定して目標軌跡M*を決定する。自車両MCの進行方向と地点P上の走行目標点GPの位置から、目標半径r*として目標軌跡M*の曲率半径を算出する。なお、上記記円弧には目標半径rが無限大すなわち直線である場合も含まれる。さらに、算出した目標半径r*と車速Vと自車両MCの車両特性パラメータに基づいて、目標半径r*を実現するための目標操舵角θ*を算出する。 When the travel target point GP is set, the target locus M * is determined on the assumption that the route of the host vehicle MC toward the travel target point GP is, for example, an arc. From the traveling direction of the host vehicle MC and the position of the travel target point GP on the point P, the curvature radius of the target locus M * is calculated as the target radius r *. The circular arc includes a case where the target radius r is infinite, that is, a straight line. Further, a target steering angle θ * for realizing the target radius r * is calculated based on the calculated target radius r *, vehicle speed V, and vehicle characteristic parameters of the host vehicle MC.
操舵制御部110は、運転者の操舵操作とは独立に、操舵アクチュエータ3により操舵トルクTを発生させ、走行車線l1に自車両MCを追従させる制御を行う。目標軌跡算出部108からの入力に基づき、操舵アクチュエータ3に対して指令を出力し、操舵制御することで、目標軌跡M*に沿って走行目標点GP(目標横位置Y*)を走行するように車両を制御する。具体的には、例えば、二輪モデルに基づいて、検出される操舵角θと車速Vと車両MCの車両特性パラメータから車体すべり角βを算出する。続いて、車体すべり角β、検出されるヨーレートψ'、操舵角θ、車速V、および車両特性パラメータに基づいてセルフアライニングトルクTsaを算出する。そして、算出したセルフアライニングトルクTsaにゲインを乗算し、第1電流It1を算出する。さらに、検出される操舵角θが目標操舵角θ*になるようにPD制御により第2電流It2を算出し、これを第1電流It1に加算して制御電流Itを算出する。操舵制御部110は、制御周期毎に目標操舵角θ*および制御電流Itを算出し、この制御電流Itの値に基づいて操舵アクチュエータ3に駆動信号を出力して操舵トルクを発生させる。なお、目標半径r*と車速Vから目標ヨーレートV/r*を求め、この目標ヨーレートに追従する操舵角をフィードフォワード/フィードバック制御することとしてもよく、特に限定しない。
The
ドライバ介入判定部106は、操舵トルク検出部102からの入力に基づき、車線追従制御中に運転者が操舵操作を行った否かを判定する。具体的には、操舵状態量(実施例1では操舵トルクTの大きさ|T|)が所定の第1の閾値(閾値T1)を越えると、運転者が操舵操作を行ったと判定し、操舵状態量(|T|)が第1の閾値(閾値T1)以下であると、運転者が操舵操作を行っていないと判定する。なお、操舵トルクT以外の操舵状態量(操舵角θや操舵角速度θ'等)を用いて運転者の操舵介入の有無を判定してもよい。例えば、操舵角θの微分値θ'(すなわち操舵速度)により、操舵操作の介入を判断するようにしてもよい。また、一定値以上の操舵トルクTの継続時間等により操舵操作の介入を判断してもよい。また、操舵トルクTに対する閾値T1の設定を含め、これらを組み合わせて判断するようにしてもよい。
Based on the input from the steering
車線中央復帰意図判定部107は、車線認識部101、操舵トルク検出部102、操舵角検出部103、車両運動状態検出部104、および障害物認識部105からの入力に基づき、運転者に車線中央lmへの復帰意図があるか否かを判定する。具体的には、(1)運転者の操舵方向が走行車線l1の外側(車線中央lmを挟んで左右いずれかの側)から車線中央lm側へ向かう方向であり、かつ操舵状態量(実施例1では操舵トルクTの大きさ|T|)が第1の閾値T1より大きい所定の第2の閾値T2(>T1)を越えたとき、または、(2)推定される車両の予想軌跡Sにおける所定の前方到達点SPが走行車線l1の外側から車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
The lane center return
(1)車線中央復帰意図判定部107は、運転者の操舵方向が車線中央lm側へ向かう方向である場合、操舵トルク検出部102から入力される操舵トルクTに基づき、運転者の車線中央lmへの復帰意図を判定する。具体的には、操舵トルクTの大きさが閾値T2を越えると、運転者の復帰意図があると判定し、操舵トルクTの大きさが閾値T2以下であれば、運転者の復帰意図がないと判定する。なお、復帰意図の判断に用いる操舵状態量として、操舵トルクT以外に、操舵角θや操舵角速度θ'等を用いてもよい。また、一定値以上の操舵トルクTの継続時間等により操舵操作の介入を判断してもよい。また、操舵トルクTに対する閾値T2の設定を含め、これらを組み合わせて判断するようにしてもよい。また、運転者の操舵方向が車線外側から中央側へ向かう方向であるか否かを判断するため、操舵トルクTの方向(符号)を用いてもよいし、操舵角θの変化方向(操舵角速度θ'の符号)を用いてもよい。
(1) When the driver's steering direction is the direction toward the lane center lm, the lane center return
(2)また、車線中央復帰意図判定部107は、車両の予想軌跡Sに基づき運転者の車線中央lmへの復帰意図を判定する。まず、車両運動状態量等から、制御周期毎に車両の予想軌跡Sを推定する。予想軌跡Sの推定は、例えば以下のように行う。車両の走行軌跡は車両運動で決定されるため、そのときの車両の位置、姿勢、車速V、ヨーレートψ'等の車両の運動状態や、(操舵角や左右輪の駆動力差のような)車両の運動をコントロールする制御入力に応じて、実際の車両の挙動から予想軌跡Sを算出する。具体的には、自車両MCの前方に距離Lだけ離れた地点における(現在の車両の位置および進行方向を基準とした)横方向移動量を、0.5×L^2×V×ψ'の式により算出する。なお、これは線形近似であるため、厳密に円弧として求めてもよい。そして、距離Lを0から任意の距離まで変化させて、走行中の道路上に重ねることで、予想軌跡Sが得られる。走行車線l1に対する自車両MCのヨー角φや横位置Y、および走行車線l1の道路曲率ρは、推定した予想軌跡Sが走行車線l1に対してどの位置にあるか、どちらに向かっているかを判定するパラメータとして用いることができる。なお、走行軌跡は車両運動で決定されるため、車両の横方向の運動として、横加速度やヨーレートψ'(または車両運動モデルと操舵角θ)を考慮することが好ましい。
(2) Further, the lane center return
そして、予想軌跡Sにおいて、車両の現在位置から走行車線l1に沿って前方へ所定距離L0(目標軌跡M*の算出に用いるものと同様)だけ離れた予想到達点SPが、車線中央lmを越えると(すなわち車線中央lmを挟んで現在の車両位置の側とは反対の側に移ると)、運転者の車線中央lmへの復帰意図があると判定する。なお、車両の予想軌跡Sにおいて現在時刻から所定時間後の予想到達点SPが車線中央lmを越えると、運転者の車線中央lmへの復帰意図があると判定することとしてもよい。
Then, in the predicted trajectory S, the predicted arrival point SP that is separated from the current position of the vehicle forward by a predetermined distance L0 (similar to that used for calculating the target trajectory M *) along the
ここで、車線中央復帰意図判定部107は、操舵角速度θ'に基づき、上記前方の予想到達点SPを補正する。具体的には、操舵角速度θ'の大きさが所定の閾値を越えると、所定時間の間、上記所定距離L0に補正距離Lcを加算することで、予想到達点SPをより前方の位置SP'に補正する。上記所定時間は、操舵角速度θ'が略ゼロとなるか、または操舵角速度θ'の符号が反転する(逆方向へ動き出す)までとすることが好ましい。
Here, the lane center return
また、走行車線l1の道路曲率ρに基づき、予想到達点SPを補正する。具体的には、走行車線l1が運転者の操舵操作と同じ方向にカーブしているときは、所定距離L0に補正距離Lcを加算することで、予想到達点SPをより前方の位置SP'に補正する。走行車線l1が運転者の操舵操作と逆の方向にカーブしているときは、所定距離L0から補正距離Lcを減算することで、予想到達点SPをより後方(自車両MCに近い側)の位置SP'に補正する。より具体的には、道路曲率ρが所定値以上である(例えば0より大きい)とき、運転者の操舵操作と同じ方向で走行車線l1の道路曲率ρが大きい(曲率半径が小さい)ほど、所定距離L0に加算する補正距離Lcを長く設定する一方、運転者の操舵操作と逆方向で走行車線l1の道路曲率ρが大きいほど、所定距離L0から減算する補正距離Lcを長く設定する。
Further, the predicted arrival point SP is corrected based on the road curvature ρ of the traveling lane l1. Specifically, when the travel lane l1 curves in the same direction as the driver's steering operation, the predicted arrival point SP is set to a position SP ′ ahead by adding the correction distance Lc to the predetermined distance L0. to correct. When the driving lane l1 curves in the direction opposite to the driver's steering operation, the expected distance SP is further rearward (side closer to the host vehicle MC) by subtracting the correction distance Lc from the predetermined distance L0. It corrects to position SP '. More specifically, when the road curvature ρ is greater than or equal to a predetermined value (for example, greater than 0), the greater the road curvature ρ of the traveling
さらに、自車両MCの周囲が他車両等の障害物によって混雑していると判断されたときは、上記と同様に、予想到達点SPをより前方の位置SP'に補正する。なお、補正距離Lcを加減算する以外の手段、例えば補正係数を乗算することで予想到達点SPを補正することとしてもよい。 Further, when it is determined that the surroundings of the host vehicle MC are congested by obstacles such as other vehicles, the predicted arrival point SP is corrected to a more forward position SP ′ as described above. The expected arrival point SP may be corrected by means other than adding / subtracting the correction distance Lc, for example, by multiplying by a correction coefficient.
目標横位置設定部109は、車線認識部101、ドライバ介入判定部106、および車線中央復帰意図判定部107からの入力に基づき、目標軌跡算出部108における目標横位置Y*を設定・変更する。具体的には、装置の起動時や、何らかの原因で(例えば右左折や車線変更により)車線追従制御が中断された後に制御を再開する際には、目標横位置Y*として現在の(その時点で検出された)横位置Y0を設定する。この場合には、目標軌跡算出部108により、自車両MCから前方に所定距離L0だけ離れた地点Pにおいて、車線中央lmから現在の(制御開始時の)横位置Y0だけ横方向に離間した位置に走行目標点GPが設定されることになる。なお、上記のように車線追従制御が中断された場合には、自車両MCが元の車線l1や隣接する車線l2に十分に入った段階、例えばタイヤ1個分に相当する程度だけ自車両MCが車線区分線lnの内側に入った段階で車線追従制御を再開することが好ましい。
The target lateral
目標横位置設定部109は、車線追従制御中、運転者の操舵操作の介入がないと判定される間は、設定された目標横位置Y*を更新しない。すなわち、自車両MCが左右に移動して横位置Yが変化しても、運転者による操舵介入があったと判定されない限り、目標横位置Y*を、設定された値Y0に固定したままで変化させない。一方、運転者の操舵操作の介入があったと判定されると、運転者の車線中央lmへの復帰意図がないと判定される限り、検出される横位置Yに合わせて目標横位置Y*を更新する。すなわち、各制御周期(サンプリングサイクル)ごとに検出される横位置Y(その制御周期における車線中央lmと自車両MCとの距離)の値を目標横位置Y*に設定する。このように、目標横位置Y*を、車線中央lmと自車両MCとの距離(横位置Y)の変動に合わせて更新する。その後、運転者の操舵操作の介入があったと判定されなくなると、そのとき更新された目標横位置Y*、すなわち操舵介入があったと最後に判定されたときに検出された横位置Yの値に、目標横位置Y*を固定する。
The target lateral
さらに、運転者の操舵操作の介入があったと判定された場合において、運転者の車線中央lmへの復帰意図があると判定されると、目標横位置Y*を0(車線中央lm)に設定する。この場合には、目標軌跡算出部108により、自車両MCから前方に走行車線l1に沿う方向に所定距離L0だけ離れた地点Pにおいて、走行目標点GPが車線中央lmに設定される。
Further, when it is determined that the driver has intervened in the steering operation, if it is determined that the driver intends to return to the lane center lm, the target lateral position Y * is set to 0 (lane center lm). To do. In this case, the target trajectory calculation unit 108 sets the travel target point GP at the center lm of the lane at the point P that is separated from the host vehicle MC by a predetermined distance L0 in the direction along the
次に、コントロールユニット10で行われる演算処理の処理手順を図3のフローチャートに従って説明する。この演算処理は、所定時間(例えば10msec)毎のタイマ割り込み処理として実行される。
まずステップS1で、車両の現在位置および道路形状を取得する。具体的には、車線認識部101が、車線中央lmからの自車両MCの横変位Y、走行車線l1に対する自車両MCのヨー角φ、走行車線l1の道路曲率ρを算出する。
次にステップS2に移行して、障害物認識部105が、周囲の障害物の位置を取得する。
次にステップS3に移行して、車両運動状態量を取得する。具体的には、車両運動状態検出部104が、ヨーレートψ'、横加速度Gy、車速Vを検出する。
次にステップS4に移行して、操舵角検出部103が、操舵角θを検出すると共に、操舵角速度θ'を算出する。例えば、読み込んだ操舵角θの前回値と今回値に基づき、操舵角速度θ'を算出する。
次にステップS5に移行して、操舵トルク検出部102が操舵トルクTを検出する。
次にステップS6に移行して、ドライバ介入判定部106が、運転者の操舵操作の有無を判定する。具体的には、操舵トルクTの大きさ|T|が第1の閾値T1を越えると、運転者が操舵操作を行ったと判定してステップS7に移行し、|T|がT1以下であると、運転者が操舵操作を行っていないと判定してステップS12に移行する。
ステップS7〜S9では、車線中央復帰意図判定部107が、運転者の車線中央lmへの復帰意図の有無を判定する。
ステップS7では、運転者の操舵方向が走行車線l1の外側から中央lm側へ向かう方向であるか否かを判定し、YESであればステップS8に移行し、NOであればステップS9に移行する。
ステップS8では、操舵トルクTの大きさ|T|が第2の閾値T2を越えたか否かを判定し、YESであれば、運転者の車線中央lmへの復帰意図があると判定してステップS10に移行し、NOであればステップS9に移行する。
ステップS9では、車両の予想軌跡Sにおける前方の到達点SPが車線中央lmを越えるか否かを判定し、YESであれば、運転者の車線中央lmへの復帰意図があると判定してステップS10に移行し、NOであれば、復帰意図がないと判定してステップS11に移行する。
ステップS10では、目標横位置設定部109が目標横位置Y*を0(車線中央lm)に設定(変更)し、ステップS12に移行する。
ステップS11では、目標横位置設定部109が目標横位置Y*をステップS1で検出された横位置Yに設定し、ステップS12に移行する。
ステップS12では、目標軌跡算出部108が、目標横位置Y*に基づき走行目標点GPを設定し、走行目標点GPに基づき目標軌跡M*および目標操舵角θ*を算出して、ステップS13に移行する。
ステップS13では、操舵制御部110が、ステップS12で算出された目標軌跡M*および目標操舵角θ*を実現するように、操舵アクチュエータ3に駆動信号を出力する。
Next, the processing procedure of the arithmetic processing performed in the
First, in step S1, the current position of the vehicle and the road shape are acquired. Specifically, the
Next, the process proceeds to step S2, and the
Next, the process proceeds to step S3, and the vehicle motion state quantity is acquired. Specifically, the vehicle motion
Next, the process proceeds to step S4, where the
Next, the process proceeds to step S5, where the
Next, the process proceeds to step S6, where the driver
In steps S7 to S9, the lane center return
In step S7, it is determined whether or not the driver's steering direction is a direction from the outside of the
In step S8, it is determined whether or not the magnitude | T | of the steering torque T exceeds the second threshold value T2. If YES, it is determined that the driver intends to return to the center lm of the lane. The process proceeds to S10, and if NO, the process proceeds to Step S9.
In step S9, it is determined whether or not the arrival point SP ahead in the predicted trajectory S of the vehicle exceeds the lane center lm. If YES, it is determined that the driver intends to return to the lane center lm. The process proceeds to S10, and if NO, it is determined that there is no return intention, and the process proceeds to Step S11.
In step S10, the target lateral
In step S11, the target lateral
In step S12, the target trajectory calculation unit 108 sets the travel target point GP based on the target lateral position Y *, calculates the target trajectory M * and the target steering angle θ * based on the travel target point GP, and then proceeds to step S13. Transition.
In step S13, the
〔作用〕
次に、上記制御処理に基づく作用について説明する。図4〜図7は、実施例1の車両用走行制御装置の作用を説明するための図であり、車線l1を走行中の車両MCを上空から見た平面図である。図中、車両MCのヨー方向の矢印の大きさは、運転者の操舵操作による操舵トルクTの大きさを直観的に示す。
[Action]
Next, the operation based on the control process will be described. FIGS. 4-7 is a figure for demonstrating the effect | action of the vehicle travel control apparatus of Example 1, and is the top view which looked at the vehicle MC which is drive | working the
車線追従制御中、各制御周期ごとに走行目標点GPから自車両MCの目標走行ライン(目標軌跡M*)を決定し(ステップS12)、それに基づいて操舵アクチュエータ3が自動操舵を行う(S13)。自車両MCは、ある制御周期における(走行目標点GPから算出される)目標軌跡M*上をその制御周期分だけ走行し、次の制御周期では新たに算出される目標軌跡M*上をその制御周期分だけ走行する。このように、自車両MCは絶えず走行目標点GPを追いかけるようにして滑らかな軌跡をたどり、これにより車線追従制御が行われる。
車線追従制御中、運転者の操舵操作の介入がない場合、ステップS1〜S6→S12→S13へ進む流れとなり、目標横位置Y*を更新せずに固定された値とし、走行目標点GPの車線中央lmからの距離を一定に保つ(S12)。よって、制御周期ごとに車線中央lmが変動すると、それに伴って走行目標点GPも位置が変動するが、車線中央lmからの離間量(横位置Y)は一定に保たれるから、自車両MCは基準となる走行ライン(車線中央lm)に追従して走行する。
During lane tracking control, a target travel line (target trajectory M *) of the host vehicle MC is determined from the travel target point GP for each control period (step S12), and the
During lane tracking control, if there is no intervention of the driver's steering operation, the flow proceeds from step S1 to S6 → S12 → S13, the target lateral position Y * is set to a fixed value without updating, and the travel target point GP is set. The distance from the center lm of the lane is kept constant (S12). Therefore, when the lane center lm changes for each control cycle, the position of the travel target point GP also changes accordingly, but the distance (lateral position Y) from the lane center lm is kept constant, so that the host vehicle MC Runs following the reference running line (lane center lm).
車線追従制御中、走行車線l1内で自車両MCの軌道を修正する等の目的で運転者がステアリングホイール2aの操作を行った場合、ステップS1〜S6→S7へ進む流れとなり、運転者の車線中央lmへの復帰意図の有無を判定する(S7〜S9)。
運転者の操舵操作の介入時、車線中央lmへの復帰意図がないと判定すると、ステップS1〜S6→S7→S9→S11→S12→S13(またはステップS1〜S6→S7→S8→S9→S11→S12→S13)へ進む流れとなり、操舵操作の介入中、走行目標点GPの車線中央lmからの離間量(目標横位置Y*)を、制御周期ごとに車線中央lmと自車両MCとの距離(横位置Y)の変動に合わせて更新する(S11)。制御周期ごとに、更新した目標横位置Y*に基づき目標軌跡M*を決定し、操舵制御を行う。
When the driver operates the
If it is determined that the driver does not intend to return to the lane center lm during the steering operation, steps S1 to S6 → S7 → S9 → S11 → S12 → S13 (or steps S1 to S6 → S7 → S8 → S9 → S11). → S12 → S13). During the intervention of the steering operation, the distance (target lateral position Y *) of the travel target point GP from the lane center lm is determined between the lane center lm and the host vehicle MC for each control cycle. It is updated according to the variation of the distance (lateral position Y) (S11). For each control cycle, the target trajectory M * is determined based on the updated target lateral position Y *, and steering control is performed.
図4に示すように、ある制御周期で、一方の(車線中央lmに対して自車両と同じ側にある)車線区分線lnに接近する方向、またはカーブ外側方向に操舵操作が介入した場合、目標横位置Y*をその制御周期で検出した横位置Yに設定し、設定した目標横位置Y*に基づき目標軌跡M*を決定し、目標軌跡M*に応じた目標操舵角θ*を実現するように操舵制御を行う。このように制御周期ごとに目標横位置Y*を更新するため、制御中の実際の車両の軌跡は、運転者の操舵操作に応じて、上記一方の車線区分線lnに徐々に接近する方向、またはカーブ外側方向に徐々に向かうものとなる。 As shown in FIG. 4, when a steering operation intervenes in one control cycle in a direction approaching one lane marking line ln (on the same side as the own vehicle with respect to the lane center lm) or in a direction outside the curve, The target lateral position Y * is set to the lateral position Y detected in the control cycle, the target trajectory M * is determined based on the set target lateral position Y *, and the target steering angle θ * corresponding to the target trajectory M * is realized. Steering control is performed. Thus, in order to update the target lateral position Y * for each control cycle, the actual trajectory of the vehicle under control is gradually approaching the one lane line ln according to the driver's steering operation, Or it will gradually go to the outside of the curve.
図5に示すように、ある制御周期で、車線中央lmに接近する方向に操舵操作が介入し、かつ車線中央lmへの復帰意図がない場合、すなわち車線中央lmへの接近動作を運転者が微調整中(例えば操舵角θが小、操舵トルクTが小)である場合、目標横位置Y*をその制御周期で検出した横位置Yに設定し、設定した目標横位置Y*に基づき目標軌跡M*を決定し、目標軌跡M*に応じた目標操舵角θ*を実現するように操舵制御を行う。制御周期ごとに目標横位置Y*を更新するため、制御中の実際の車両の軌跡は、運転者の操舵操作に応じて、車線中央lmに徐々に接近するものとなる。 As shown in FIG. 5, when a steering operation intervenes in a direction approaching the lane center lm in a certain control cycle and there is no intention to return to the lane center lm, that is, the driver approaches the lane center lm. When fine adjustment is in progress (for example, the steering angle θ is small and the steering torque T is small), the target lateral position Y * is set to the lateral position Y detected in the control cycle, and the target is set based on the set target lateral position Y *. The trajectory M * is determined, and steering control is performed so as to realize the target steering angle θ * corresponding to the target trajectory M *. Since the target lateral position Y * is updated at each control cycle, the actual trajectory of the vehicle being controlled gradually approaches the lane center lm according to the driver's steering operation.
以上のように、自車両MCを走行車線l1の進行方向に向かわせるように比較的弱い自動操舵力が発生するため、走行車線l1に対する車両姿勢を一定に保つことが容易である。
操舵操作介入ありとの判定が終了すると、再びステップS1〜S6→S12→S13へ進む流れとなるため、操舵操作の介入が終了した制御周期(S1)で検出した横位置Yを目標横位置Y*として固定し(S12)、この目標横位置Y*に基づき目標軌跡M*を決定し、操舵制御を行う。このように、操舵操作の介入終了後、直ちに通常の車線追従制御が作動するため、運転者は、上記のような目標横位置Y*の調整を、車両挙動が安定した状態で、かつ少ない操舵操作で行うことができる。
As described above, since a relatively weak automatic steering force is generated so that the host vehicle MC is directed in the traveling direction of the travel lane l1, it is easy to keep the vehicle posture with respect to the travel lane l1 constant.
When the determination that the steering operation is present is completed, the process proceeds again from step S1 to S6 → S12 → S13. Therefore, the lateral position Y detected in the control cycle (S1) when the intervention of the steering operation is completed is the target lateral position Y. * Is fixed (S12), a target locus M * is determined based on the target lateral position Y *, and steering control is performed. As described above, since normal lane tracking control is activated immediately after the intervention of the steering operation, the driver adjusts the target lateral position Y * as described above in a state in which the vehicle behavior is stable and the steering is reduced. Can be done by operation.
運転者の操舵操作の介入時、車線中央lmへの復帰意図があると判定すると、ステップS1〜S6→S7→S8→S10→S12→S13(またはステップS1〜S6→S7→S8→S9→S10→S12→S13、またはステップS1〜S6→S7→S9→S10→S12→S13)へ進む流れとなり、操舵操作の介入中、走行目標点GPの車線中央lmからの離間量(目標横位置Y*)を0に設定する(S10)。各制御周期ごとに、設定した目標横位置Y*=0に基づき目標軌跡M*を決定し、操舵制御を行う。
具体的には、車線中央lmに接近する方向に操舵操作が介入し、かつ操舵トルクTの大きさ|T|が第2の閾値T1を越えた場合、または推定される予想軌跡Sにおける前方到達点SPが車線中央lmを越えた場合、各制御周期で、目標横位置Y*を0に設定し、設定した目標横位置Y*=0に基づき目標軌跡M*を決定し、目標軌跡M*に応じた目標操舵角θ*を実現するように操舵制御を行う。よって、制御中の実際の自車両MCの軌跡は、速やかに車線中央lmに接近するものとなる。
If it is determined that the driver intends to return to the lane center lm during the steering operation, steps S1 to S6 → S7 → S8 → S10 → S12 → S13 (or steps S1 to S6 → S7 → S8 → S9 → S10). → S12 → S13, or steps S1 to S6 → S7 → S9 → S10 → S12 → S13). During the intervention of the steering operation, the distance of the travel target point GP from the lane center lm (target lateral position Y *) ) Is set to 0 (S10). In each control cycle, a target locus M * is determined based on the set target lateral position Y * = 0, and steering control is performed.
Specifically, when the steering operation intervenes in a direction approaching the center lm of the lane and the magnitude | T | of the steering torque T exceeds the second threshold T1, or when the estimated trajectory S is reached in the forward direction When the point SP exceeds the lane center lm, the target lateral position Y * is set to 0 in each control cycle, the target trajectory M * is determined based on the set target lateral position Y * = 0, and the target trajectory M * Steering control is performed so as to realize the target steering angle θ * according to the above. Therefore, the trajectory of the actual host vehicle MC being controlled quickly approaches the lane center lm.
このように、例えば目標横位置Y*を車線の中央lmから外寄りへ修正した状態で車線追従制御が行われているとき、車線の外側から内側(車線中央方向)への運転者の修正操舵が行われた場合、運転者の車線中央lmへの復帰意図を判定し、復帰意図ありと判定すると、目標横位置Y*を車線中央lmに設定する。よって、目標横位置Y*を車線中央lmへ復帰させるために、運転者が細かい修正操舵(操舵操作の微調整)を行う必要がないため、道路形状の変化に関わらず、より容易に車線中央寄りに向かうことができる。なお、復帰意図ありと判定すると直ちに目標横位置Y*を車線中央lmに設定してもよいし、復帰意図ありと判定した後、所定の時間をかけて徐々に目標横位置Y*が車線中央lmに移行するように設定してもよい。
具体的には、目標横位置Y*を単に(微)調整するための操舵操作の介入を判定する閾値(第1の閾値T1)よりも大きな第2の操舵操作の介入判定閾値T2に基づいて、運転者の車線中央lmへの復帰意図を判定する。このように、操舵状態量(操舵トルクT等)に基づいて車線中央lmへの復帰意図判定を行うため、復帰意図をより簡便に判定することができる。
Thus, for example, when the lane following control is performed with the target lateral position Y * corrected from the center lm of the lane to the outside, the corrected steering of the driver from the outside of the lane to the inside (lane center direction). Is determined, the driver's intention to return to the lane center lm is determined, and if it is determined that there is a return intention, the target lateral position Y * is set to the lane center lm. Therefore, in order to return the target lateral position Y * to the lane center lm, it is not necessary for the driver to perform fine correction steering (fine adjustment of the steering operation), so that the center of the lane can be more easily set regardless of changes in the road shape. You can head closer. Note that the target lateral position Y * may be set to the lane center lm as soon as it is determined that the return intention is intended, or after the determination that the return intention is intended, the target lateral position Y * gradually becomes the lane center over a predetermined time. You may set so that it may transfer to lm.
Specifically, based on a second steering operation intervention determination threshold value T2 that is larger than a threshold value (first threshold value T1) for determining steering operation intervention for simply (fine) adjusting the target lateral position Y *. The driver intends to return to the center lm of the lane. Thus, since the return intention determination to the lane center lm is performed based on the steering state quantity (steering torque T or the like), the return intention can be determined more easily.
また、図6に示すように、車両運動状態量等から推定される自車両MCの予想軌跡Sにおいて現在位置から前方へ所定距離L0だけ離れた到達点SPが、車線中央lmを越えて反対側(右寄り走行中は車線中央より左。左寄り走行中は車線中央より右。なお、「車線中央lm」は、厳密な中央線でなく、中央線を含む所定の幅を有してもよい)になった場合、運転者の車線中央復帰意図があると判定する。このように、実際の車両挙動および走路形状に基づいて車線中央lmへの復帰判定を行うため、片勾配(横断勾配)等の外乱の影響で操舵状態量(操舵トルクT等)が発生しにくい状況であっても、車線中央lmへの復帰意図をより確実に判定できる。 In addition, as shown in FIG. 6, the arrival point SP, which is separated from the current position by a predetermined distance L0 in the predicted trajectory S of the host vehicle MC estimated from the vehicle motion state quantity or the like, is beyond the lane center lm. (Left from the center of the lane when traveling to the right, right from the center of the lane when traveling toward the left. Note that “lane center lm” is not a strict center line but may have a predetermined width including the center line.) If this happens, it is determined that the driver intends to return to the center of the lane. As described above, since the return determination to the lane center lm is performed based on the actual vehicle behavior and the running road shape, the steering state quantity (steering torque T or the like) is unlikely to occur due to the influence of disturbance such as a single slope (cross slope). Even in the situation, it is possible to more reliably determine the intention to return to the lane center lm.
また、図7に示すように、自車両MCの予想軌跡Sにおいて、自車両MCの現在位置から走行車線l1に沿って前方へ所定距離L0だけ離れた予想到達点SPを推定する際、操舵角速度θ'の大きさが所定の閾値を越えた状態が検出されてから所定時間の間、所定距離L0に補正距離Lcを加算することで、予想到達点SPをより前方の位置SP'に補正する。これにより、運転者の操舵操作(操舵角θ)が小さく、予想軌跡Sの曲率が小さい(曲率半径が大きい)場合であっても、予想到達点SP'が車線中央lmを越えて反対側に移りやすくなる。すなわち、操舵角速度θ'の大きさが閾値を越えると、所定時間の間は、運転者の車線中央lmへの復帰意図判定の感度を良くする。このため、例えば操舵操作量(操舵角θ)が小さい時点から、より速やかに、運転者の車線中央lmへの復帰意図の有無を判定することができる。このように、操舵操作の変化量を復帰意図判定用のパラメータ(所定距離L0)に反映させてこれを補正することで、より正確に車線中央lmへの復帰意図を判定することができる。
Further, as shown in FIG. 7, in estimating the predicted arrival point SP that is separated from the current position of the host vehicle MC by a predetermined distance L0 forward along the
また、走行車線l1の道路曲率ρが所定値以上のとき、道路曲率ρが運転者の操舵操作と同じ方向で大きいほど、上記所定距離L0に加算する補正距離Lcを長く設定する一方、道路曲率ρが運転者の操舵操作と逆方向で大きいほど、所定距離L0から減算する補正距離Lcを長く設定する。これにより、走行車線l1が運転者の操舵操作と同じ方向にカーブしており、カーブの度合いが大きい場合であっても、予想到達点SP'が車線中央lmを越えて反対側に移りやすくなり、運転者の車線中央lmへの復帰意図判定の感度が良くなる。すなわち、道路曲率ρが運転者の操舵操作と同じ方向で大きいほど、車両を目標軌跡よりも内側(車線中央側)へ戻すために必要な操舵操作量が大きくなる。よって、復帰意図の判定に用いるパラメータ(所定距離L0)が固定値である場合、車線中央lmへの復帰意図判定のために必要な操舵操作への正確性が要求される(道路曲率ρが運転者の操舵操作と逆の方向で大きい場合は、逆のことがいえる)。これに対し、実施例1では、道路状況に応じて、道路曲率ρが運転者の操舵操作と同じ方向で大きいほど、上記判定用パラメータを、復帰意図判定の感度が高くなる方向へ変更する。これにより、車線中央lmへの復帰に必要な操舵操作量が大きくなる状況で、復帰を意図する運転者の操舵操作が多少不正確であっても、走行目標点GPの切り換え(車線中央lmへの復帰)が素早く行われるようになり、運転者が安心して走行できるようになる。このように、走行環境による復帰意図判定への影響を低減することで、より確実に車線中央lmへの復帰意図を判定することができる。
Further, when the road curvature ρ of the traveling
また、自車両MCの周囲が他車両等の障害物によって混雑しているときは、上記所定距離L0に補正距離Lcを加算することで、予想到達点SPをより前方の位置SP'に補正する。これにより、運転者の車線中央lmへの復帰意図判定の感度が良くなる。すなわち、自車両MCの周囲が混雑していると判定されたときは、周囲の道路状況の変化によって、運転者が走行位置を車線中央lmへ戻したい状況であることが推測される。よって、このような場合には、運転者が正確に走行目標点GPの修正を完了しなくても、復帰意図ありと判定する。これにより、走行目標点GPの切り換え(車線中央lmへの復帰)が素早く行われるため、運転者が安心して走行できるようになる。 Further, when the surroundings of the host vehicle MC are congested with obstacles such as other vehicles, the predicted arrival point SP is corrected to a more forward position SP ′ by adding the correction distance Lc to the predetermined distance L0. . Thereby, the sensitivity of the driver's intention to return to the lane center lm is improved. That is, when it is determined that the surroundings of the host vehicle MC are congested, it is estimated that the driver wants to return the traveling position to the lane center lm due to a change in surrounding road conditions. Therefore, in such a case, it is determined that there is a return intention even if the driver does not complete the correction of the travel target point GP accurately. As a result, the switching of the travel target point GP (return to the lane center lm) is performed quickly, so that the driver can travel with peace of mind.
〔効果〕
以下、実施例1の車両用走行制御装置の効果を列挙する。
(1)自車両MCが走行する車線l1における自車両MCの現在の横位置Yを検出する横位置検出手段(車線認識部101)と、運転者の操舵状態量(操舵トルクT、操舵角θ等)を検出する操舵状態検出手段(操舵トルク検出部102、操舵角検出部103)と、自車両MCの運動状態量(ヨーレートψ'、車速V等)を検出する車両運動状態検出手段(車両運動状態検出部104)と、自車両MCが走行する車線l1における自車両MCの目標横位置Y*を設定し、目標横位置Y*を走行するように自車両MCを制御すると共に、検出される操舵状態量(操舵トルクT)が第1の閾値(閾値T1)を越えると、検出される横位置Yに合わせて目標横位置Y*を更新し、その後、検出される操舵状態量が第1の閾値以下になると、そのとき検出された横位置Yに目標横位置Y*を固定する車線追従制御手段(ドライバ介入判定部106、目標横位置設定部109、目標軌跡算出部108、操舵制御部110)と、検出される操舵状態量(操舵トルクT)または車両運動状態量(ヨーレートψ'、車速V)に基づき運転者の車線中央lmへの復帰意図を判定する車線中央復帰意図判定手段(車線中央復帰意図判定部107)とを備え、車線追従制御手段(目標横位置設定部109)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段は、運転者の操舵方向が車線l1の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
よって、車線追従制御中、運転者が車線中央lm寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者が操舵操作の細かい微調整を行う必要がなく、より容易に車線中央lm寄りに向かうことができることができるため、運転者の操舵操作の負担を軽減することができる。
〔effect〕
Hereinafter, effects of the vehicle travel control apparatus of the first embodiment will be listed.
(1) Lateral position detection means (lane recognition unit 101) for detecting the current lateral position Y of the host vehicle MC in the
Therefore, during the lane tracking control, when the driver intervenes in the steering operation for the purpose of moving toward the center lm of the lane, the driver does not need to make fine adjustments in the steering operation, and the lane center is more easily controlled. Since it is possible to head toward lm, the burden on the steering operation of the driver can be reduced.
(2)操舵状態検出手段(操舵角検出部103)は、運転者の操舵速度(操舵角速度θ')を検出し、車線中央復帰意図判定手段(車線中央復帰意図判定部107)は、検出される操舵速度の大きさが所定の閾値を越えると、所定時間の間、前方到達点SPをより前方の位置に補正する。
よって、より正確ないし迅速に車線中央lmへの復帰意図を判定することができるため、運転者の操舵操作の負担をより軽減することができる。
(2) The steering state detection means (steering angle detection unit 103) detects the steering speed (steering angular speed θ ′) of the driver, and the lane center return intention determination means (lane center return intention determination unit 107) is detected. When the magnitude of the steering speed exceeds a predetermined threshold, the front arrival point SP is corrected to a more forward position for a predetermined time.
Therefore, since the intention to return to the lane center lm can be determined more accurately or quickly, the burden on the driver's steering operation can be further reduced.
(3)自車両MCが走行する車線l1の曲率ρを検出する曲率検出手段(車線認識部101)を備え、車線中央復帰意図判定手段(車線中央復帰意図判定部107)は、検出される曲率ρが運転者の操舵方向と同じ方向で大きいほど、前方到達点SPの位置をより前方の位置に補正する。
よって、より確実ないし迅速に車線中央lmへの復帰意図を判定することができるため、運転者の操舵操作の負担をより軽減することができる。
(3) Curvature detection means (lane recognition unit 101) for detecting the curvature ρ of the
Therefore, since the intention to return to the lane center lm can be determined more reliably or quickly, the burden on the driver's steering operation can be further reduced.
(4)自車両MCの周囲の障害物の位置を検出する障害物検出手段(障害物認識部105)を備え、車線中央復帰意図判定手段(車線中央復帰意図判定部107)は、検出される障害物の位置が自車両MCから所定範囲内であるとき、前方到達点SPの位置をより前方の位置に補正する。
よって、より迅速に車線中央lmへの復帰意図を判定することができるため、運転者の操舵操作の負担をより軽減することができる。
(4) Provided with obstacle detection means (obstacle recognition unit 105) for detecting the position of obstacles around the host vehicle MC, the lane center return intention determination means (lane center return intention determination unit 107) is detected. When the position of the obstacle is within a predetermined range from the host vehicle MC, the position of the front arrival point SP is corrected to a more forward position.
Therefore, since the intention to return to the lane center lm can be determined more quickly, the burden on the steering operation of the driver can be further reduced.
〔他の実施例〕
以上、本願発明を実施例1に基づいて説明してきたが、上記実施例に限らず、他の構成であっても本発明に含まれる。
例えば、本発明の車両用走行制御装置は、操舵制御を行うことができれば、どのような操舵機構や自動操舵機構(操舵アクチュエータ)を備えた車両であっても適用することができる。例えば、車輪を自動操舵するための操舵アクチュエータは、操舵機構に操舵アシストトルクを発生するパワーステアリング装置のアクチュエータでもよい。また、ステアリングシャフト(ステアリングホイール)に操舵反力トルクを発生する操舵反力アクチュエータを用いてもよく、車両用走行制御装置は、操舵反力トルクを操舵力伝達系に与えることで走行車線に自車を追従させるべく、運転者の操舵操作をサポートする制御装置であってもよい。また、操舵制御を行うための手段(操舵アクチュエータ)として、操舵トルクを操舵力伝達系に与えるものに限らず、例えば、各車輪に駆動力や制動力を発生させる駆動/制動アクチュエータを用い、車両の制駆動力を制御することで操舵制御を実現することとしてもよい。
実施例1では、現在の横位置Yを検出したり目標横位置Y*を設定したりするために車線中央lmを基準としたが、これに限らず、例えば(左右の)車線区分線lnを基準としたり、(左右の車線区分線lnから算出される)車線の道幅に対する車線区分線lnからの自車両MCの距離の比率を基準としたりしてもよい。
[Other Examples]
As mentioned above, although this invention has been demonstrated based on Example 1, it is not restricted to the said Example but another structure is also included in this invention.
For example, the vehicle travel control device of the present invention can be applied to any vehicle equipped with any steering mechanism or automatic steering mechanism (steering actuator) as long as it can perform steering control. For example, the steering actuator for automatically steering the wheel may be an actuator of a power steering device that generates a steering assist torque in the steering mechanism. In addition, a steering reaction force actuator that generates a steering reaction torque on the steering shaft (steering wheel) may be used, and the vehicle travel control device automatically applies the steering reaction torque to the traveling lane by applying the steering reaction torque to the steering force transmission system. It may be a control device that supports a driver's steering operation in order to follow the vehicle. Further, the means (steering actuator) for performing the steering control is not limited to the one that applies the steering torque to the steering force transmission system, and for example, a driving / braking actuator that generates a driving force or a braking force on each wheel is used. Steering control may be realized by controlling the braking / driving force.
In the first embodiment, the lane center lm is used as a reference in order to detect the current lateral position Y or set the target lateral position Y *. However, the present invention is not limited to this. For example, the (left and right) lane markings ln are It may be a reference, or a ratio of the distance of the host vehicle MC from the lane line ln to the road width of the lane (calculated from the left and right lane line ln) may be used as a reference.
101 車線認識部(横位置検出手段)
102 操舵トルク検出部(操舵状態検出手段)
103 操舵角検出部(操舵状態検出手段)
104 車両運動状態検出部(車両運動状態検出手段)
106 ドライバ介入判定部(車線追従制御手段)
107 車線中央復帰意図判定部(車線中央復帰意図判定手段)
108 目標軌跡算出部(車線追従制御手段)
109 目標横位置設定部(車線追従制御手段)
110 操舵制御部(車線追従制御手段)
l1 車線
MC 自車両
101 Lane recognition unit (lateral position detection means)
102 Steering torque detector (steering state detector)
103 Steering angle detector (steering state detector)
104 Vehicle motion state detection unit (vehicle motion state detection means)
106 Driver intervention determination unit (lane tracking control means)
107 Lane center return intention determination unit (lane center return intention determination means)
108 Target locus calculation unit (lane tracking control means)
109 Target lateral position setting unit (lane tracking control means)
110 Steering control unit (lane tracking control means)
l1 Lane MC
Claims (4)
運転者の操舵状態量を検出する操舵状態検出手段と、
自車両が走行する車線における自車両の目標横位置を設定し、前記目標横位置を走行するように自車両を制御すると共に、前記操舵状態量が第1の閾値を越えると、検出される前記横位置に合わせて前記目標横位置を更新し、その後、前記操舵状態量が前記第1の閾値以下になると、そのとき検出された前記横位置に前記目標横位置を固定する車線追従制御手段とを備え、
前記車線追従制御手段は、運転者の操舵方向が車線外側から中央側へ向かう方向であり、かつ、前記操舵状態量が前記第1の閾値よりも大きい第2の閾値を越えたとき、前記目標横位置を車線中央に設定することを特徴とする車両用走行制御装置。 Lateral position detecting means for detecting the current lateral position of the host vehicle in the lane in which the host vehicle is traveling;
Steering state detection means for detecting the amount of steering state of the driver ;
Setting a target lateral position of the host vehicle in the lane which the vehicle is traveling, to control the vehicle to travel the target lateral position, when the pre-Symbol steering state quantity exceeds the first threshold value, it is detected updates the target lateral position to suit the lateral position, then, before Symbol the steering state quantity falls below the first threshold, the lane keeping control for fixing the target lateral position of the detected lateral position that time Means and
The lane tracking control means is configured to detect the target when the driver's steering direction is a direction from the outside of the lane toward the center and the steering state quantity exceeds a second threshold value that is larger than the first threshold value. A vehicle travel control device characterized in that the lateral position is set at the center of the lane.
運転者の操舵状態量を検出する操舵状態検出手段と、
自車両の運動状態量を検出する車両運動状態検出手段と、
自車両が走行する車線における自車両の目標横位置を設定し、前記目標横位置を走行するように自車両を制御すると共に、前記操舵状態量が所定の閾値を越えると、検出される前記横位置に合わせて前記目標横位置を更新し、その後、前記操舵状態量が前記所定の閾値以下になると、そのとき検出された前記横位置に前記目標横位置を固定する車線追従制御手段と、
自車両が走行する車線の曲率を検出する曲率検出手段とを備え、
前記車線追従制御手段は、
前記車両運動状態量から推定される自車両の予想軌跡における所定の前方到達点が車線中央を越えたとき、前記目標横位置を車線中央に設定し、
前記曲率が運転者の操舵方向と同じ方向で大きいほど、前記前方到達点をより前方の位置に補正することを特徴とする車両用走行制御装置。 Lateral position detecting means for detecting the current lateral position of the host vehicle in the lane in which the host vehicle is traveling;
Steering state detection means for detecting the amount of steering state of the driver;
Vehicle motion state detection means for detecting the amount of motion state of the host vehicle;
The target lateral position of the host vehicle in the lane in which the host vehicle is traveling is set, the host vehicle is controlled to travel in the target lateral position, and the detected lateral state is detected when the steering state quantity exceeds a predetermined threshold. Lane tracking control means for updating the target lateral position in accordance with the position, and then fixing the target lateral position to the lateral position detected at that time when the steering state quantity is equal to or less than the predetermined threshold;
Curvature detection means for detecting the curvature of the lane in which the host vehicle travels,
The lane tracking control means is
When a predetermined forward arrival point in the predicted trajectory of the host vehicle estimated from the vehicle motion state quantity exceeds the lane center, the target lateral position is set at the lane center,
The vehicle travel control apparatus , wherein the front arrival point is corrected to a more forward position as the curvature is larger in the same direction as the driver's steering direction .
運転者の操舵状態量を検出する操舵状態検出手段と、
自車両の運動状態量を検出する車両運動状態検出手段と、
自車両が走行する車線における自車両の目標横位置を設定し、前記目標横位置を走行するように自車両を制御すると共に、前記操舵状態量が所定の閾値を越えると、検出される前記横位置に合わせて前記目標横位置を更新し、その後、前記操舵状態量が前記所定の閾値以下になると、そのとき検出された前記横位置に前記目標横位置を固定する車線追従制御手段と、
自車両周囲の障害物の位置を検出する障害物検出手段とを備え、
前記車線追従制御手段は、
前記車両運動状態量から推定される自車両の予想軌跡における所定の前方到達点が車線中央を越えたとき、前記目標横位置を車線中央に設定し、
前記障害物の位置が自車両から所定範囲内であるとき、前記前方到達点をより前方の位置に補正することを特徴とする車両用走行制御装置。 Lateral position detecting means for detecting the current lateral position of the host vehicle in the lane in which the host vehicle is traveling;
Steering state detection means for detecting the amount of steering state of the driver;
Vehicle motion state detection means for detecting the amount of motion state of the host vehicle;
The target lateral position of the host vehicle in the lane in which the host vehicle is traveling is set, the host vehicle is controlled to travel in the target lateral position, and the detected lateral state is detected when the steering state quantity exceeds a predetermined threshold. Lane tracking control means for updating the target lateral position in accordance with the position, and then fixing the target lateral position to the lateral position detected at that time when the steering state quantity is equal to or less than the predetermined threshold;
An obstacle detection means for detecting the position of an obstacle around the host vehicle,
The lane tracking control means is
When a predetermined forward arrival point in the predicted trajectory of the host vehicle estimated from the vehicle motion state quantity exceeds the lane center, the target lateral position is set at the lane center,
The vehicle travel control device , wherein when the position of the obstacle is within a predetermined range from the host vehicle, the front arrival point is corrected to a more forward position.
前記操舵状態検出手段は、運転者の操舵速度を検出し、
前記車線追従制御手段は、前記操舵速度の大きさが所定の閾値を越えると、所定時間の間、前記前方到達点をより前方の位置に補正することを特徴とする車両用走行制御装置。 In the vehicle travel control device according to claim 2 or 3 ,
The steering state detecting means detects the steering speed of the driver,
The vehicle lane tracking control means corrects the front arrival point to a more forward position for a predetermined time when the magnitude of the steering speed exceeds a predetermined threshold value .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011216247A JP5853552B2 (en) | 2011-09-30 | 2011-09-30 | Vehicle travel control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011216247A JP5853552B2 (en) | 2011-09-30 | 2011-09-30 | Vehicle travel control device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013075600A JP2013075600A (en) | 2013-04-25 |
| JP5853552B2 true JP5853552B2 (en) | 2016-02-09 |
Family
ID=48479414
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011216247A Active JP5853552B2 (en) | 2011-09-30 | 2011-09-30 | Vehicle travel control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5853552B2 (en) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5802241B2 (en) * | 2013-07-04 | 2015-10-28 | 富士重工業株式会社 | Vehicle driving support control device |
| FR3013296B1 (en) * | 2013-11-18 | 2015-12-11 | Renault Sas | METHOD AND DEVICE FOR AUTOMATIC VEHICLE DRIVING |
| KR102231109B1 (en) * | 2014-03-14 | 2021-03-24 | 주식회사 만도 | Apparatus for line keeping assistant in a vehicle and method thereof |
| JP2015189404A (en) * | 2014-03-28 | 2015-11-02 | マツダ株式会社 | Lane keeping controller |
| JP6331637B2 (en) * | 2014-04-18 | 2018-05-30 | トヨタ自動車株式会社 | Driving support device |
| JP5946497B2 (en) * | 2014-08-26 | 2016-07-06 | 三菱電機株式会社 | Steering control device |
| JP6445320B2 (en) * | 2014-12-25 | 2018-12-26 | 株式会社豊田中央研究所 | Driving assistance device |
| JP6900930B2 (en) * | 2018-04-13 | 2021-07-14 | トヨタ自動車株式会社 | Vehicle driving control device |
| JP6714116B1 (en) * | 2019-02-06 | 2020-06-24 | 三菱電機株式会社 | Vehicle control device and vehicle control method |
| JP7477236B2 (en) * | 2020-08-28 | 2024-05-01 | 株式会社Subaru | Lane Departure Prevention Control Device |
| CN116524473A (en) * | 2023-07-03 | 2023-08-01 | 深圳安智杰科技有限公司 | Obstacle target track prediction system and method in lane line defect scene |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3882318B2 (en) * | 1998-03-06 | 2007-02-14 | トヨタ自動車株式会社 | Vehicle steering control device |
| JP3740902B2 (en) * | 1999-08-10 | 2006-02-01 | 日産自動車株式会社 | Lane tracking device |
| JP4638370B2 (en) * | 2006-03-29 | 2011-02-23 | 富士重工業株式会社 | Lane departure prevention device |
| JP4721279B2 (en) * | 2006-03-29 | 2011-07-13 | 富士重工業株式会社 | Lane tracking support device |
| JP2008059366A (en) * | 2006-08-31 | 2008-03-13 | Nissan Motor Co Ltd | Steering angle determination device, automobile, and steering angle determination method |
-
2011
- 2011-09-30 JP JP2011216247A patent/JP5853552B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013075600A (en) | 2013-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5853552B2 (en) | Vehicle travel control device | |
| JP6573643B2 (en) | Vehicle travel control device | |
| US8457868B2 (en) | Lane keeping assist device and lane keeping assist method | |
| JP6055525B1 (en) | Vehicle travel control device | |
| JP6638041B1 (en) | Lane keeping control device | |
| US9573593B2 (en) | Lane deviation prevention control apparatus of vehicle | |
| US9610976B2 (en) | Lane departure prevention control system for vehicle | |
| JP5514333B2 (en) | Vehicle lane change control device and control method therefor | |
| JP5569631B2 (en) | Lane maintenance support method and lane maintenance support device | |
| WO2009113224A1 (en) | Vehicle travel support device, vehicle, and vehicle travel support program | |
| JP5332703B2 (en) | Lane maintenance support device and lane maintenance support method | |
| WO2016110729A1 (en) | Target vehicle speed generation device and drive control device | |
| WO2007108429A1 (en) | Avoidance operation calculation device, avoidance control device, vehicle with each of the devices, avoidance operation calculation method, and avoidance control method | |
| JP2010513123A (en) | How to adjust the steering system in a vehicle | |
| CN114302839B (en) | Method for determining a path for avoiding a motor vehicle | |
| JP7216589B2 (en) | automatic steering controller | |
| JPWO2014064805A1 (en) | Vehicle travel support device | |
| JP6986463B2 (en) | Driving support device, driving support method and driving support system | |
| JP2015189410A (en) | Vehicle lane departure prevention control device | |
| JP5790401B2 (en) | Vehicle travel support device | |
| JP2020032949A (en) | Automatic operation system | |
| JP2003058993A (en) | Lane deviation warning device | |
| JP2010030505A (en) | Vehicle steering unit and vehicles steering method | |
| JP5380861B2 (en) | Lane maintenance support device and lane maintenance support method | |
| JP2020164061A (en) | Vehicle control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140724 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150410 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150519 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150721 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151123 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5853552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |