JP5492364B2 - 3次元基準マーク - Google Patents
3次元基準マーク Download PDFInfo
- Publication number
- JP5492364B2 JP5492364B2 JP2013121959A JP2013121959A JP5492364B2 JP 5492364 B2 JP5492364 B2 JP 5492364B2 JP 2013121959 A JP2013121959 A JP 2013121959A JP 2013121959 A JP2013121959 A JP 2013121959A JP 5492364 B2 JP5492364 B2 JP 5492364B2
- Authority
- JP
- Japan
- Prior art keywords
- sample
- reference mark
- interest
- charged particle
- mark
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000002245 particle Substances 0.000 claims description 79
- 239000000463 material Substances 0.000 claims description 59
- 238000000034 method Methods 0.000 claims description 39
- 238000003384 imaging method Methods 0.000 claims description 35
- 238000010884 ion-beam technique Methods 0.000 claims description 28
- 238000010894 electron beam technology Methods 0.000 claims description 26
- 238000000151 deposition Methods 0.000 claims description 21
- 238000003801 milling Methods 0.000 claims description 15
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 claims description 10
- 229910052697 platinum Inorganic materials 0.000 claims description 5
- 239000000523 sample Substances 0.000 description 190
- 230000009977 dual effect Effects 0.000 description 18
- 238000004626 scanning electron microscopy Methods 0.000 description 18
- 230000008021 deposition Effects 0.000 description 16
- 150000002500 ions Chemical class 0.000 description 10
- 238000009304 pastoral farming Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 239000004065 semiconductor Substances 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 5
- 239000002243 precursor Substances 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 238000001000 micrograph Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000005086 pumping Methods 0.000 description 2
- 238000010408 sweeping Methods 0.000 description 2
- 238000004627 transmission electron microscopy Methods 0.000 description 2
- ZCYVEMRRCGMTRW-UHFFFAOYSA-N 7553-56-2 Chemical compound [I] ZCYVEMRRCGMTRW-UHFFFAOYSA-N 0.000 description 1
- GYHNNYVSQQEPJS-UHFFFAOYSA-N Gallium Chemical compound [Ga] GYHNNYVSQQEPJS-UHFFFAOYSA-N 0.000 description 1
- 108010083687 Ion Pumps Proteins 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 239000012472 biological sample Substances 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000013590 bulk material Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000000354 decomposition reaction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 229910052733 gallium Inorganic materials 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 229910052740 iodine Inorganic materials 0.000 description 1
- 239000011630 iodine Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910021645 metal ion Inorganic materials 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 150000002902 organometallic compounds Chemical class 0.000 description 1
- 230000000979 retarding effect Effects 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 238000003892 spreading Methods 0.000 description 1
- 238000000992 sputter etching Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/304—Controlling tubes by information coming from the objects or from the beam, e.g. correction signals
- H01J37/3045—Object or beam position registration
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/26—Electron or ion microscopes
- H01J2237/28—Scanning microscopes
- H01J2237/2809—Scanning microscopes characterised by the imaging problems involved
- H01J2237/2811—Large objects
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/317—Processing objects on a microscale
- H01J2237/31732—Depositing thin layers on selected microareas
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/317—Processing objects on a microscale
- H01J2237/3174—Etching microareas
- H01J2237/31745—Etching microareas for preparing specimen to be viewed in microscopes or analyzed in microanalysers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/317—Processing objects on a microscale
- H01J2237/31749—Focused ion beam
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T428/00—Stock material or miscellaneous articles
- Y10T428/24—Structurally defined web or sheet [e.g., overall dimension, etc.]
- Y10T428/24479—Structurally defined web or sheet [e.g., overall dimension, etc.] including variation in thickness
- Y10T428/24488—Differential nonuniformity at margin
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T428/00—Stock material or miscellaneous articles
- Y10T428/24—Structurally defined web or sheet [e.g., overall dimension, etc.]
- Y10T428/24802—Discontinuous or differential coating, impregnation or bond [e.g., artwork, printing, retouched photograph, etc.]
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Sampling And Sample Adjustment (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
- Welding Or Cutting Using Electron Beams (AREA)
- Mounting And Adjusting Of Optical Elements (AREA)
Description
1114 イオン源
1116 集束カラム
1119 システム・コントローラ
1121 記憶装置
1122 試料
1124 可動X−Y−Zステージ
Claims (27)
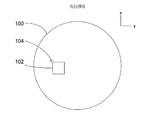
- 試料上に基準マークを形成し、前記基準マークを使用して、前記試料上の関心領域の位置を突き止める方法であって、
試料上の、前記試料上の関心領域に隣接した位置に、前記試料の表面から前記試料の表面の上方へ検出可能なある大きさで広がる材料ブロックを付着させ、
前記材料ブロックの少なくとも2つの露出した面に、荷電粒子ビームを使用して所定のパターンをミリングする
ことによって基準マークを形成するステップと、
前記基準マークを形成した後に、前記基準マークの位置を検出することによって、前記関心領域の位置を検出するステップと、
前記関心領域の位置を検出した後に、荷電粒子ビームを使用して、前記関心領域を画像化またはミリングするステップと
を含む方法。 - 前記基準マークの位置を検出することが、
前記試料の表面の少なくとも一部分を荷電粒子ビームを使用して画像化すること、および
前記試料の前記一部分の画像中の前記基準マークの前記所定のパターンを検出すること
を含む、請求項1に記載の方法。 - 前記試料の前記一部分の画像中の前記基準マークの前記所定のパターンが、画像認識ソフトウェアによって自動的に検出される、請求項2に記載の方法。
- 前記基準マークを荷電粒子ビームによって画像化したときに、前記基準マークが、前記材料ブロックとははっきりと異なる輝度値またはコントラスト値を有するように、前記所定のパターンが前記基準マークにミリングされる、請求項1から3のいずれか一項に記載の方法。
- 付着させた前記材料ブロックを、荷電粒子ビームによって、少なくとも2つの次元で画像化またはミリングすることが可能である、請求項1から4のいずれか一項に記載の方法。
- 少なくとも2つの荷電粒子ビームによって前記基準マークを同時に画像化することができる位置に、前記基準マークが配置される、請求項1から5のいずれか一項に記載の方法。
- 画像化が電子ビームによって実行され、ミリングが集束イオン・ビームによって実行される、請求項1から6のいずれか一項に記載の方法。
- 付着させた前記材料ブロックの幾何形状が実質的に平行六面体である、請求項1から7のいずれか一項に記載の方法。
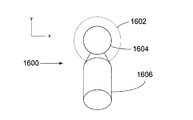
- 試料上の関心領域の位置を突き止めるための基準マークであって、
試料上の関心領域に隣接した位置に付着させた材料ブロックであり、前記試料の表面から前記試料の表面の上方へ検出可能なある大きさで広がる材料ブロックと、
前記材料ブロックの少なくとも2つの露出した面にミリングされた所定のパターンと
を含む基準マーク。 - 最大寸法が100マイクロメートル(100μm)以下である、請求項9に記載の基準マーク。
- 最大寸法が10マイクロメートル(10μm)以下である、請求項9または10に記載の基準マーク。
- 最大寸法が1マイクロメートル(1μm)以下である、請求項9から11のいずれか一項に記載の基準マーク。
- 前記材料ブロックが、一段高い白金パッドを含む、請求項9から12のいずれか一項に記載の基準マーク。
- 前記基準マークを荷電粒子ビームによって画像化したときに、前記基準マークが、前記材料ブロックとははっきりと異なる輝度値またはコントラスト値を有するように、前記所定のパターンが前記基準マークにミリングされた、請求項9から13のいずれか一項に記載の基準マーク。
- 少なくとも2つの荷電粒子ビームによって前記基準マークを同時に画像化することができる位置に配置された、請求項9から14のいずれか一項に記載の基準マーク。
- 付着させた前記材料ブロックの幾何形状が実質的に平行六面体である、請求項9から15のいずれか一項に記載の基準マーク。
- 少なくとも1つの荷電粒子ビームと、
試料ステージと、
前記試料ステージ上に配置された試料と、
前記試料上に配置された基準マークと
を備え、前記基準マークが、
試料上の関心領域に隣接した位置に付着させた材料ブロックであり、前記試料の表面から前記試料の表面の上方へ検出可能なある大きさで広がる材料ブロックと、
前記材料ブロックの少なくとも2つの露出した面にミリングされた所定のパターンと
を含むシステム。 - 前記基準マークの最大寸法が100マイクロメートル(100μm)以下である、請求項17に記載のシステム。
- 前記基準マークの最大寸法が10マイクロメートル(10μm)以下である、請求項17または18に記載のシステム。
- 前記基準マークの最大寸法が1マイクロメートル(1μm)以下である、請求項17から19のいずれか一項に記載のシステム。
- 前記材料ブロックが、一段高い白金パッドを含む、請求項17から20のいずれか一項に記載のシステム。
- 前記基準マークを荷電粒子ビームによって画像化したときに、前記基準マークが、前記材料ブロックとははっきりと異なる輝度値またはコントラスト値を有するように、前記所定のパターンが前記基準マークにミリングされた、請求項17から21のいずれか一項に記載のシステム。
- 少なくとも2つの荷電粒子ビームによって前記基準マークを同時に画像化することができる位置に、前記基準マークが配置された、請求項17から22のいずれか一項に記載のシステム。
- 付着させた前記材料ブロックの幾何形状が実質的に平行六面体である、請求項17から23のいずれか一項に記載のシステム。
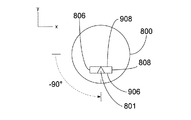
- 試料上の関心領域の位置を突き止めるための基準マークを前記試料上に形成する方法であって、
前記試料を画像化位置から実質的に90度回転させるステップと、
前記試料を前記画像化位置から実質的に90度回転させた後に、前記試料の表面に対して垂直でないある角度で前記試料の表面に向かって導かれた荷電粒子ビームを使用して、前記関心領域上または前記関心領域の近くに材料ブロックを付着させるステップと、
前記材料ブロックを付着させた後、前記関心領域の位置を検出する前に、前記試料を実質的に90度回転させて、前記試料をその最初の位置に戻すステップと
を含む方法。 - 前記荷電粒子ビームが走査電子顕微鏡の電子ビームであり、前記電子ビームが、前記試料の表面に対して直角でないある角度で前記試料の表面に導かれる、請求項25に記載の方法。
- 前記基準マークを形成した後に、前記基準マークの位置を突き止めることによって前記関心領域の位置を突き止めるステップと、前記関心領域に向かって集束イオン・ビームを導くステップとをさらに含み、前記集束イオン・ビームが、前記試料の表面に対して実質的に直角なある角度で前記試料の表面に導かれる、請求項26に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/533,870 US8502172B1 (en) | 2012-06-26 | 2012-06-26 | Three dimensional fiducial |
| US13/533,870 | 2012-06-26 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014006524A JP2014006524A (ja) | 2014-01-16 |
| JP5492364B2 true JP5492364B2 (ja) | 2014-05-14 |
Family
ID=48782869
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013121959A Active JP5492364B2 (ja) | 2012-06-26 | 2013-06-10 | 3次元基準マーク |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US8502172B1 (ja) |
| EP (1) | EP2680296A3 (ja) |
| JP (1) | JP5492364B2 (ja) |
| CN (1) | CN103512567B (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8502172B1 (en) * | 2012-06-26 | 2013-08-06 | Fei Company | Three dimensional fiducial |
| KR102148284B1 (ko) | 2012-12-31 | 2020-08-26 | 에프이아이 컴파니 | 하전 입자 비임을 이용한 경사지거나 비스듬한 밀 작업들을 위한 기준 설계 |
| JP5464535B1 (ja) * | 2013-07-23 | 2014-04-09 | 株式会社日立ハイテクノロジーズ | Ebsd検出器で所望箇所を容易に分析できる荷電粒子線装置およびその制御方法 |
| US9218940B1 (en) * | 2014-05-30 | 2015-12-22 | Fei Company | Method and apparatus for slice and view sample imaging |
| JP6385899B2 (ja) | 2014-07-21 | 2018-09-05 | エフ・イ−・アイ・カンパニー | Tem試料取付け構造 |
| CN104390585B (zh) * | 2014-09-30 | 2017-06-23 | 苏州天准科技股份有限公司 | 一种建立三维测量基准平面的装置及其方法 |
| US9619728B2 (en) * | 2015-05-31 | 2017-04-11 | Fei Company | Dynamic creation of backup fiducials |
| JP6730008B2 (ja) * | 2015-06-16 | 2020-07-29 | アオイ電子株式会社 | 微小試料台、その製造方法および微小試料の取付方法 |
| EP3125270B1 (en) * | 2015-07-27 | 2019-04-10 | FEI Company | Tem sample mounting geometry |
| DE102016002883B4 (de) | 2016-03-09 | 2023-05-17 | Carl Zeiss Microscopy Gmbh | Verfahren zum Struktuieren eines Objekts und Partikelstrahlsystem hierzu |
| CN106454288B (zh) | 2016-11-29 | 2018-01-19 | 广东欧珀移动通信有限公司 | 控制方法、控制装置、成像装置及电子装置 |
| CN110020648B (zh) * | 2018-01-10 | 2022-03-22 | 上银科技股份有限公司 | 工件量测及定位方法 |
| JP7308710B2 (ja) * | 2019-09-25 | 2023-07-14 | 株式会社日立ハイテクサイエンス | 集束イオンビーム装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5435850A (en) | 1993-09-17 | 1995-07-25 | Fei Company | Gas injection system |
| US5721687A (en) * | 1995-02-01 | 1998-02-24 | The Regents Of The University Of California Office Of Technology Transfer | Ultrahigh vacuum focused ion beam micromill and articles therefrom |
| US5851413A (en) | 1996-06-19 | 1998-12-22 | Micrion Corporation | Gas delivery systems for particle beam processing |
| DE10351059B4 (de) * | 2003-10-31 | 2007-03-01 | Roth & Rau Ag | Verfahren und Vorrichtung zur Ionenstrahlbearbeitung von Oberflächen |
| US7348556B2 (en) * | 2005-07-19 | 2008-03-25 | Fei Company | Method of measuring three-dimensional surface roughness of a structure |
| JP5873227B2 (ja) * | 2007-12-06 | 2016-03-01 | エフ・イ−・アイ・カンパニー | デコレーションを用いたスライス・アンド・ビュー |
| JP5098926B2 (ja) * | 2008-09-24 | 2012-12-12 | 富士通株式会社 | 顕微鏡用試料、その作製方法及び顕微鏡観察方法 |
| TWI372859B (en) * | 2008-10-03 | 2012-09-21 | Inotera Memories Inc | Method for manufacturing an electron tomography specimen with fiducial markers and method for constructing 3d image |
| DE102009050521B4 (de) * | 2009-10-23 | 2023-02-16 | Pro-Beam Ag & Co. Kgaa | Thermisches Materialbearbeitungsverfahren |
| DE102010024625A1 (de) * | 2010-06-22 | 2011-12-22 | Carl Zeiss Nts Gmbh | Verfahren zum Bearbeiten eines Objekts |
| EP2492950B1 (en) * | 2011-02-25 | 2018-04-11 | FEI Company | Method for rapid switching between a high current mode and a low current mode in a charged particle beam system |
| JP2012243726A (ja) * | 2011-05-24 | 2012-12-10 | Renesas Electronics Corp | 自動加工システム |
| US8502172B1 (en) * | 2012-06-26 | 2013-08-06 | Fei Company | Three dimensional fiducial |
-
2012
- 2012-06-26 US US13/533,870 patent/US8502172B1/en active Active
-
2013
- 2013-06-10 JP JP2013121959A patent/JP5492364B2/ja active Active
- 2013-06-25 EP EP13173471.7A patent/EP2680296A3/en not_active Withdrawn
- 2013-06-25 CN CN201310255880.2A patent/CN103512567B/zh active Active
- 2013-07-23 US US13/948,364 patent/US8822957B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20130344292A1 (en) | 2013-12-26 |
| EP2680296A2 (en) | 2014-01-01 |
| US8822957B2 (en) | 2014-09-02 |
| EP2680296A3 (en) | 2015-09-09 |
| CN103512567A (zh) | 2014-01-15 |
| US8502172B1 (en) | 2013-08-06 |
| JP2014006524A (ja) | 2014-01-16 |
| CN103512567B (zh) | 2016-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5492364B2 (ja) | 3次元基準マーク | |
| US10529538B2 (en) | Endpointing for focused ion beam processing | |
| US11315756B2 (en) | Fiducial design for tilted or glancing mill operations with a charged particle beam | |
| JP6224612B2 (ja) | 断面観察薄片の裏側薄化用の高スループットtem調製プロセスおよびハードウェア | |
| JP5090255B2 (ja) | 原位置でのstemサンプル作製方法 | |
| US7858936B2 (en) | Slice and view with decoration | |
| JP5719494B2 (ja) | 電子ビームを用いた表面下の画像化 | |
| EP2904633B1 (en) | Multidimensional structural access | |
| US9368325B2 (en) | TEM sample preparation | |
| US10539489B2 (en) | Methods for acquiring planar view STEM images of device structures | |
| JP6453580B2 (ja) | 試料調製中におけるtem試料からのプローブの分離 | |
| US10410829B1 (en) | Methods for acquiring planar view stem images of device structures |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131229 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20131229 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140204 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20140131 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140302 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5492364 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |