JP5439118B2 - 騒音制御装置 - Google Patents
騒音制御装置 Download PDFInfo
- Publication number
- JP5439118B2 JP5439118B2 JP2009251073A JP2009251073A JP5439118B2 JP 5439118 B2 JP5439118 B2 JP 5439118B2 JP 2009251073 A JP2009251073 A JP 2009251073A JP 2009251073 A JP2009251073 A JP 2009251073A JP 5439118 B2 JP5439118 B2 JP 5439118B2
- Authority
- JP
- Japan
- Prior art keywords
- noise
- control
- signal
- output
- processing unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





















































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R1/00—Details of transducers, loudspeakers or microphones
- H04R1/10—Earpieces; Attachments therefor ; Earphones; Monophonic headphones
- H04R1/1083—Reduction of ambient noise
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Acoustics & Sound (AREA)
- Signal Processing (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Soundproofing, Sound Blocking, And Sound Damping (AREA)
- Exhaust Silencers (AREA)
Description
る。図44に示すように、制御点4での結果が信号処理部300に誤差信号として戻され、信号処理部300は、その誤差信号を元に信号処理部300の制御特性(係数)を変化させる。
(1) 騒音制御処理が騒音伝達時間内に間に合う
(2) 参照信号と誤差信号との相関性が高い
ことが、騒音低減効果を最大限に得るための条件と言える。
τ+τ1+τ2+2×τ3≦T
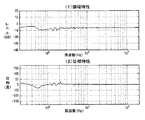
であることが必要である。ここで、図49は、図48のアナログLPFの特性を示す図である。LPF7〜8が図49に示す特性である場合、最大群遅延τ3は10kHz付近で30サンプル(サンプリング周波数を48kHzとすると、30/48000=0.625msec)以上になっている。τ、τ1、τ2は全ての周波数で同じ値なので、LPF7〜8の最大群遅延τ3に相当する周波数10kHz付近で騒音制御処理が騒音伝達時間内に間に合うかどうかが制御のポイントとなる。
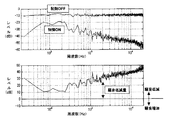
z以上で騒音低減量が少なくなっているのは、図49(1)に示すようにLPF7〜8のレベルが急激に低減しているためである。その影響を信号処理部300が受けるため10kHz以上で騒音低減量が少なくなっているだけであり、騒音制御処理が騒音伝達時間内に間に合っていれば、騒音増加することなく、騒音を低減することができる。
本発明の第1の実施形態に係る騒音制御装置の構成について説明する。図1は、第1の実施形態に係る騒音制御装置の回路構成を示す図である。
て動作させると図5に示す効果が得られる。図5を見ると、図3での60Hzの騒音増加が防止されているだけでなく騒音低減されており、かつ、200Hz以下での騒音低減効果も向上している。
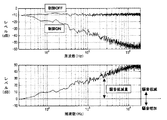
を示している。800〜4000Hzにおいて、騒音増加になっている。これに対して、図1のLPF501に共振周波数fc=6kHzの2次LPFを適用し、ゲイン調整器503に適切なプラスの値を設定して、出力補正部500に構成されたFBを正帰還したときの騒音低減効果を図16に示す。図16に示すように、800〜4000Hzにおいて、騒音増加が抑制され、さらに6kHz以下で騒音低減効果が向上している。
に共振周波数fc=100Hzの2次HPFを適用して出力補正部500を動作させない場合の騒音低減効果は図3であった。そこで、図1のLPF501に共振周波数fc=60Hzの1次LPFを適用して、ゲイン調整器503に適切なマイナスの値を設定して負帰還すると、その騒音低減効果は図21のようになる。図21では、図3と比較すると、60Hz以下の騒音増加は少なくなっているが、完全に無くなっているわけではない。また、100Hz以上でも騒音低減効果が劣化している。同様に、図1のHPF401に共振周波数fc=1kHzの2次HPFを適用し、LPF501に共振周波数fc=600Hzの1次LPFを適用して、ゲイン調整器503に適切なマイナスの値を設定して負帰還すると、その騒音低減効果は図22のようになる。図22では、図13と比較すると、400Hz以下の騒音増加は少なくなっているが、完全に無くなっているわけではない。また、600Hz以上でも騒音低減効果が劣化している。さらに、図1のHPF401に共振周波数fc=10kHzの2次HPFを適用し、LPF501に共振周波数fc=6kHzの1次LPFを適用して、ゲイン調整器503に適切なマイナスの値を設定して負帰還すると、その騒音低減効果は図23のようになる。図23では、図15と比較すると、2kHz以下の騒音増加は少なくなっているが、その量は僅かである。また、4kHz以上でも騒音低減効果が劣化している。
応答なのに比べて、図24のFIRフィルタ600は有限応答であることによる。
本実施形態では、第1の実施形態で説明した騒音制御装置の出力補正部を複数の正帰還で構成する場合について述べる。図31は、第2の実施形態に係る騒音制御装置の回路構成を示す図である。
本実施形態では、第2の実施形態で説明した騒音制御装置の信号処理部を適応フィルタとして動作させる場合について述べる。図38は、第3の実施形態に係る騒音制御装置の回路構成を示す図である。図38において、第3の実施形態に係る騒音制御装置は、信号処理部300において適応フィルタ301を含む構成としている。
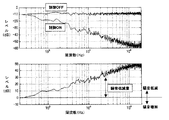
を伝達してきた騒音と、制御音響系400からの制御音とが加算され、エラー信号として係数更新部303へ入力される。ところで、信号処理部300のFxフィルタ302の特性(係数)は、出力補正部500の特性と制御音響系400の特性とを合わせた特性に近似している。あるいは、Fxフィルタ302内に出力補正部500と同一の処理を構成し、制御音響系400の特性を近似したフィルタを直列に接続するようにしてもよい。そして、係数更新部303は、このFxフィルタ302の出力信号と制御点4からのエラー信号とに基づいて、エラー信号が最小になるように適応フィルタ301の係数を更新する。これによって、制御点4での騒音が低減することになる。図39は、図38に示した騒音制御装置の騒音低減効果を示す図である。ここで、出力補正部500のLPF501には図10に示す共振周波数fc=60Hzの1次LPFを適用し、LPF503には図35に示す共振周波数fc=30Hzの2次LPFを適用する。図39と図36とを比べると、図39では騒音低減効果が大きく向上している。
4 制御点
5,115,117 ADコンバータ
6,116 DAコンバータ
7,8 アナログLPF
9,10 1次HPF
102 容器
103 騒音検出マイク
104 消音誤差検出マイク
105 消音用スピーカ
106,110,600 FIRフィルタ
107,109 デジタルフィルタ
108,111 係数制御部
112,113,114 アンプ
200 騒音伝達系
201 ゲイン
300 信号処理部
301 適応フィルタ
302 Fxフィルタ
303 係数更新部
400 制御音響系
401 HPF
500 出力補正部
501,504 LPF
502,505 加算器
503,506 ゲイン調整器
2001,2002,2003,2004 騒音マイク
3000 騒音制御システム
4001,4002 スピーカ
4003,4004 エラーマイク
Claims (4)
- 騒音源から出力される騒音が騒音伝達系を介して伝達され、前記伝達された騒音を制御点において制御音と合成させて、当該騒音を低減する騒音制御装置であって、
前記騒音源から出力される騒音を検出して、当該騒音に基づく制御信号を生成する信号処理部と、
前記信号処理部から出力される制御信号に基づいて、前記騒音を打ち消す制御音を生成する制御音響系と、
前記騒音源から騒音が出力されてから前記信号処理部および前記制御音響系を介して前記制御点に前記制御音が到達するまでの騒音制御処理時間τが、前記騒音源から騒音が出力されてから前記騒音伝達系を介して前記制御点に前記騒音が到達するまでの騒音伝達時間Tより大きくなる(τ>T)周波数帯域において、前記信号処理部から出力される制御信号を補正する出力補正部とを備え、
前記出力補正部は、
前記信号処理部から出力された制御信号が入力される加算器と、
前記加算器から出力される信号のうち、前記周波数帯域における信号を抽出するフィルタ回路と、
前記フィルタ回路によって抽出された信号をレベル調整するゲイン調整器とを備え、
前記騒音伝達系を介して前記制御点に到達する騒音が有する騒音伝達特性と、前記制御音響系から出力される制御音が有する騒音制御伝達特性とが、同一振幅かつ逆位相となるように、前記信号処理部から出力される制御信号を補正し、
前記信号処理部から出力される制御信号に、前記ゲイン調整器によってレベル調整された信号を、前記加算器によって加算して、当該加算した制御信号を前記制御音響系に出力することを特徴とする、騒音制御装置。 - 前記加算器、前記フィルタ回路、および前記ゲイン調整器は、1つの帰還系を構成し、
前記出力補正部は複数の前記帰還系を備え、前記複数の帰還系は直列接続されることを特徴とする、請求項1に記載の騒音制御装置。 - 前記制御点において、前記騒音伝達系を介して伝達される騒音と、前記制御音響系から出力される制御音とが合成された信号を誤差信号として前記信号処理部に入力させ、
前記信号処理部は、
前記騒音源から出力される騒音を検出して、当該検出された信号を参照信号とし、
前記誤差信号のレベルを最小にするように、前記参照信号と誤差信号とに基づいて、前記制御信号を生成することを特徴とする、請求項1に記載の騒音制御装置。 - 騒音源から出力される騒音が騒音伝達系を介して伝達され、前記伝達された騒音を制御点において制御音と合成させて、当該騒音を低減する騒音制御装置であって、
前記騒音源から出力される騒音を検出して、当該騒音に係数処理を施すことで制御信号を生成するFIR(Finite Impulse Response)フィルタと、
前記FIRフィルタから出力される制御信号に基づいて、前記騒音を打ち消す制御音を生成する制御音響系とを備え、
前記FIRフィルタは、前記騒音源から騒音が出力されてから前記FIRフィルタおよび前記制御音響系を介して前記制御点に前記制御音が到達するまでの騒音制御処理時間τが、前記騒音源から騒音が出力されてから前記騒音伝達系を介して前記制御点に前記騒音が到達するまでの騒音伝達時間Tより大きくなる(τ>T)周波数帯域において、前記騒音伝達系を介して前記制御点に到達する騒音が有する騒音伝達特性と、前記制御音響系から出力される制御音が有する騒音制御伝達特性とが同一振幅かつ逆位相となるように係数を設定することで、前記制御信号を補正するフィルタであり、
前記FIRフィルタから出力される制御信号が、
前記騒音源から出力される騒音を検出して当該騒音に基づく制御信号を生成する信号処理部と、当該信号処理部から出力された制御信号が入力される加算器と、当該加算器から出力される信号のうち前記周波数帯域における信号を抽出するフィルタ回路と、当該フィルタ回路によって抽出された信号をレベル調整するゲイン調整器とで構成され、前記騒音伝達特性と前記騒音制御伝達特性とが同一振幅かつ逆位相となるように、前記信号処理部から出力される制御信号を補正し、前記信号処理部から出力される制御信号に前記ゲイン調整器によってレベル調整された信号を前記加算器によって加算して、当該加算された制御信号を前記制御音響系に出力する、制御信号設定装置によって設定された制御信号と同等になるように、
前記係数が算出されることを特徴とする、騒音制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009251073A JP5439118B2 (ja) | 2008-11-14 | 2009-10-30 | 騒音制御装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008292246 | 2008-11-14 | ||
| JP2008292246 | 2008-11-14 | ||
| JP2009251073A JP5439118B2 (ja) | 2008-11-14 | 2009-10-30 | 騒音制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010140018A JP2010140018A (ja) | 2010-06-24 |
| JP2010140018A5 JP2010140018A5 (ja) | 2012-04-26 |
| JP5439118B2 true JP5439118B2 (ja) | 2014-03-12 |
Family
ID=42172097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009251073A Expired - Fee Related JP5439118B2 (ja) | 2008-11-14 | 2009-10-30 | 騒音制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8233633B2 (ja) |
| JP (1) | JP5439118B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8759661B2 (en) | 2010-08-31 | 2014-06-24 | Sonivox, L.P. | System and method for audio synthesizer utilizing frequency aperture arrays |
| US8983833B2 (en) * | 2011-01-24 | 2015-03-17 | Continental Automotive Systems, Inc. | Method and apparatus for masking wind noise |
| CN102870436B (zh) * | 2011-02-24 | 2016-08-24 | 松下知识产权经营株式会社 | 绕射声衰减装置、绕射声衰减方法、以及滤波系数决定方法 |
| US8653354B1 (en) * | 2011-08-02 | 2014-02-18 | Sonivoz, L.P. | Audio synthesizing systems and methods |
| US9786262B2 (en) | 2015-06-24 | 2017-10-10 | Edward Villaume | Programmable noise reducing, deadening, and cancelation devices, systems and methods |
| GB201514220D0 (en) * | 2015-08-12 | 2015-09-23 | Norgren Ltd C A | Cascaded adaptive filters for attenuating noise in a feedback path of a flow controller |
| US10706833B2 (en) * | 2015-10-30 | 2020-07-07 | Pioneer Corporation | Active noise control apparatus, active noise control method and program |
| CN112017626B (zh) * | 2020-08-21 | 2024-02-06 | 中车株洲电力机车有限公司 | 轨道交通车辆有源降噪方法及司机室 |
| US11908444B2 (en) * | 2021-10-25 | 2024-02-20 | Gn Hearing A/S | Wave-domain approach for cancelling noise entering an aperture |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3089082B2 (ja) | 1991-07-10 | 2000-09-18 | シャープ株式会社 | 適応型ディジタルフィルタ |
| JPH0758223B2 (ja) | 1991-08-21 | 1995-06-21 | 晴夫 浜田 | 消音・制振効果の測定方法並びに測定装置及び信号源探査装置 |
| JP3346198B2 (ja) * | 1996-12-10 | 2002-11-18 | 富士ゼロックス株式会社 | 能動消音装置 |
| JP3359301B2 (ja) | 1999-06-04 | 2002-12-24 | 松下電器産業株式会社 | 騒音制御装置 |
| JP2001295622A (ja) * | 2000-04-18 | 2001-10-26 | Fuji Xerox Co Ltd | 能動型消音装置 |
| JP5194434B2 (ja) * | 2006-11-07 | 2013-05-08 | ソニー株式会社 | ノイズキャンセリングシステムおよびノイズキャンセル方法 |
-
2009
- 2009-10-30 JP JP2009251073A patent/JP5439118B2/ja not_active Expired - Fee Related
- 2009-11-12 US US12/616,978 patent/US8233633B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010140018A (ja) | 2010-06-24 |
| US20100124341A1 (en) | 2010-05-20 |
| US8233633B2 (en) | 2012-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5439118B2 (ja) | 騒音制御装置 | |
| JP5342063B2 (ja) | アクティブノイズリダクション適応フィルタリング | |
| JP3089082B2 (ja) | 適応型ディジタルフィルタ | |
| JP6616768B2 (ja) | アクティブ・ノイズ・コントロール・システム | |
| US8559648B2 (en) | Active noise control using bass management | |
| JP5005765B2 (ja) | アクティブノイズ除去適応フィルタの漏洩調整 | |
| JP5787478B2 (ja) | 適合ノイズ制御システム | |
| JP5640063B2 (ja) | 調整可能なアクティブ雑音制御 | |
| JP5255087B2 (ja) | 適応性ノイズコントロール | |
| JP4995276B2 (ja) | エンジン速度決定アクティブ雑音減少 | |
| JP6066335B2 (ja) | 消音装置 | |
| JP5707663B2 (ja) | 能動消音装置 | |
| US10240812B2 (en) | Signal processing device, program, range hood device, and selection method for frequency bins in signal processing device | |
| Wu et al. | Decoupling feedforward and feedback structures in hybrid active noise control systems for uncorrelated narrowband disturbances | |
| JP2017114475A (ja) | 外部接続された拡声器システム | |
| JP2010140018A5 (ja) | ||
| JP4977551B2 (ja) | 能動型騒音制御装置 | |
| JP2009298289A (ja) | 車両用能動型振動騒音制御システム | |
| JP6116300B2 (ja) | 能動型消音システム | |
| WO2023090120A1 (ja) | 騒音制御装置、プログラム、及び騒音制御方法 | |
| JP2019203919A (ja) | ノイズ除去装置 | |
| JP2018169439A (ja) | アクティブ消音装置及びアクティブ消音方法 | |
| JP4516774B2 (ja) | 振動制御システム | |
| JPH0619482A (ja) | アクティブ消音方法及び消音装置 | |
| JP2791510B2 (ja) | アクティブ消音装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110826 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120309 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120309 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5439118 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |