JP5317536B2 - 装着型人支援装置 - Google Patents
装着型人支援装置 Download PDFInfo
- Publication number
- JP5317536B2 JP5317536B2 JP2008140502A JP2008140502A JP5317536B2 JP 5317536 B2 JP5317536 B2 JP 5317536B2 JP 2008140502 A JP2008140502 A JP 2008140502A JP 2008140502 A JP2008140502 A JP 2008140502A JP 5317536 B2 JP5317536 B2 JP 5317536B2
- Authority
- JP
- Japan
- Prior art keywords
- wearer
- linear transmission
- support device
- drive
- person support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Manipulator (AREA)
- Prostheses (AREA)
Description
(1) 本発明は、一端が被装着者の皮膚の被駆動領域に貼り付けられる線状伝達部材と、
該線状伝達部材の他端に結合され、前記被駆動部分から離間した他の部分に装着される駆動部と、
前記線状伝達部材を前記被装着者の皮膚に貼着させる貼着部材と、
当該被装着者の意思に応じた指令信号を生成する指令信号生成手段と、
該指令信号生成手段から出力された指令信号に基づいて前記駆動部による駆動力を制御する制御部と、
を備え、
前記駆動部は、駆動力を発生させる際に駆動音を生じない無音方式のアクチュエータであることにより、上記課題を解決するものである。
(2) 本発明は、請求項1に記載の装着型人支援装置であって、
前記線状伝達部材は、断面が微細かつ扁平形状に形成されることにより、上記課題を解決するものである。
(3) 本発明は、請求項1又は2に記載の装着型人支援装置であって、
前記線状伝達部材は、温度に応じた形状に変化する形状記憶合金により形成され、
前記駆動部は、
前記線状伝達部材に連結され、温度に応じた形状に変化する形状記憶合金と、
前記形状記憶合金の温度を調整する温度調整手段と、
からなることにより、上記課題を解決するものである。
(4) 本発明は、請求項1乃至3の何れかに記載の装着型人支援装置であって、
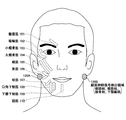
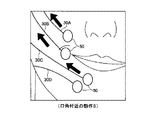
前記線状伝達部材の一端を前記被装着者の顔の表情筋を覆う皮膚に貼着し、
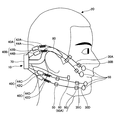
前記駆動部及び前記制御部を前記被装着者の後頭部に配したことにより、上記課題を解決するものである。
(5) 本発明は、請求項1乃至4の何れかに記載の装着型人支援装置であって、
前記指令信号生成手段は、前記被装着者の筋肉を動作させるための生体信号を検出する生体信号検出手段であり、
前記制御部は、前記生体信号検出手段により検出された生体信号に基づき前記被装着者が行なうとする顔の表情に応じた駆動制御信号を生成し、当該駆動制御信号を前記駆動部に印加することにより、上記課題を解決するものである。
(6) 本発明は、請求項1乃至4の何れかに記載の装着型人支援装置であって、
前記指令信号生成手段は、前記被装着者が操作するコントローラであり、
前記制御部は、前記コントローラからの指令信号に応じた駆動制御信号を生成し、当該駆動制御信号を前記駆動部に印加することにより、上記課題を解決するものである。
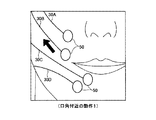
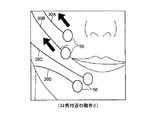
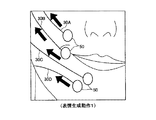
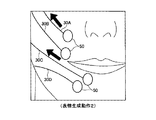
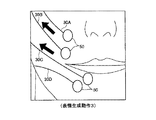
次のS14では、上記特定された顔面表情を作成する表情筋に対応する各線状伝達部材30A〜30Bの変位量を演算またはデータベースより得る。続いて、S15に進み、各線状伝達部材30A〜30Bの変位量に対応する駆動時間(顔面表情動作の持続可能時間、例えば、1秒〜2秒)及び、温度調整部44A〜44Dによる形状記憶合金42A〜42Dに対する温度制御値(目標値)を演算する。尚、顔面表情を大きく動作させる場合(例えば、大笑いする場合)には、駆動時間が長く設定され、温度制御値も大きい値に設定される。また、顔面表情を小さく動作させる場合(例えば、小さく微笑む場合)には、駆動時間が短く設定され、温度制御値も小さい値に設定される。また、上記駆動時間と温度制御値との組み合わせを変化させることでそのときの感情に応じた様々な表情を再現することが可能になる。
及び右側に配することで、顔面全体が動作するように補助することも可能である。この場合、生体信号検出センサ60A,60Bにより神経伝達信号を検出できないおそれがあるが、上記手動操作方式のコントローラ200を操作すれば顔全体の動作補助も可能である。
20 被装着者
30A〜30D 線状伝達部材
32A〜32D 保護チューブ
40A〜40D 駆動部
42A〜42D 形状記憶合金
44A〜44D 温度調整部
50 貼着部材
60 指令信号生成手段
60A,60B 生体信号検出センサ
70 制御ユニット
72 記憶手段
74 中央処理装置
76A〜76D 駆動制御信号出力部
80 フレーム
90 バッテリ
103 小頬骨筋
104 大頬骨筋
106 笑筋
107 咬筋
109 下唇下制筋
120A,120B 顔面神経信号検出領域
200 コントローラ
Claims (6)
- 一端が被装着者の皮膚の被駆動領域に貼り付けられる線状伝達部材と、
該線状伝達部材の他端に結合され、前記被駆動部分から離間した他の部分に装着される駆動部と、
前記線状伝達部材を前記被装着者の皮膚に貼着させる貼着部材と、
当該被装着者の意思に応じた指令信号を生成する指令信号生成手段と、
該指令信号生成手段から出力された指令信号に基づいて前記駆動部による駆動力を制御する制御部と、
を備え、
前記駆動部は、駆動力を発生させる際に駆動音を生じない無音方式のアクチュエータであることを特徴とする装着型人支援装置。 - 請求項1に記載の装着型人支援装置であって、
前記線状伝達部材は、断面が微細かつ扁平形状に形成されることを特徴とする装着型人支援装置。 - 請求項1又は2に記載の装着型人支援装置であって、
前記駆動部は、
前記線状伝達部材に連結され、温度に応じた形状に変位する形状記憶合金と、
前記形状記憶合金の温度を調整する温度調整手段と、
からなることを特徴とする装着型人支援装置。 - 請求項1乃至3の何れかに記載の装着型人支援装置であって、
前記線状伝達部材の一端を前記被装着者の顔の表情筋を覆う皮膚に貼着し、
前記駆動部及び前記制御部を前記被装着者の後頭部に配したことを特徴とする装着型人支援装置。 - 請求項1乃至4の何れかに記載の装着型人支援装置であって、
前記指令信号生成手段は、前記被装着者の筋肉を動作させるための生体信号を検出する生体信号検出手段であり、
前記制御部は、前記生体信号検出手段により検出された生体信号に基づき前記被装着者が行なうとする顔の表情に応じた駆動制御信号を生成し、当該駆動制御信号を前記駆動部に印加することを特徴とする装着型人支援装置。 - 請求項1乃至4の何れかに記載の装着型人支援装置であって、
前記指令信号生成手段は、前記被装着者が操作するコントローラであり、
前記制御部は、前記コントローラからの指令信号に応じた駆動制御信号を生成し、当該駆動制御信号を前記駆動部に印加することを特徴とする装着型人支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008140502A JP5317536B2 (ja) | 2008-05-29 | 2008-05-29 | 装着型人支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008140502A JP5317536B2 (ja) | 2008-05-29 | 2008-05-29 | 装着型人支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009285115A JP2009285115A (ja) | 2009-12-10 |
| JP5317536B2 true JP5317536B2 (ja) | 2013-10-16 |
Family
ID=41454907
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008140502A Active JP5317536B2 (ja) | 2008-05-29 | 2008-05-29 | 装着型人支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5317536B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210093281A (ko) * | 2018-11-09 | 2021-07-27 | 아킬리 인터랙티브 랩스 인크. | 정서 장애의 검사 및 치료를 위한 얼굴 표정 검출 |
| CN111449807B (zh) * | 2020-03-25 | 2023-05-26 | 深圳市大族三维科技有限公司 | 鼻假体适用性的判定方法、装置、终端设备及存储介质 |
| CN118178162A (zh) * | 2024-04-12 | 2024-06-14 | 上海交通大学 | 面瘫康复训练机器人、系统及方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3929509B2 (ja) * | 1995-02-23 | 2007-06-13 | ソニー株式会社 | 情報出力装置 |
| US5865770A (en) * | 1995-12-06 | 1999-02-02 | Schectman; Leonard A. | Device to counteract paralysis |
| JP3978972B2 (ja) * | 2000-03-28 | 2007-09-19 | セイコーエプソン株式会社 | 身体装着型筋力補助装置 |
| JP4178187B2 (ja) * | 2005-01-26 | 2008-11-12 | 国立大学法人 筑波大学 | 装着式動作補助装置及び制御用プログラム |
| JP4997416B2 (ja) * | 2006-03-22 | 2012-08-08 | 国立大学法人 筑波大学 | 回動調整装置及び回動装置の制御方法 |
-
2008
- 2008-05-29 JP JP2008140502A patent/JP5317536B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009285115A (ja) | 2009-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Jayatilake et al. | Robot assisted physiotherapy to support rehabilitation of facial paralysis | |
| Connelly et al. | A pneumatic glove and immersive virtual reality environment for hand rehabilitative training after stroke | |
| Shull et al. | Haptic wearables as sensory replacement, sensory augmentation and trainer–a review | |
| Knaepen et al. | Human–robot interaction: Kinematics and muscle activity inside a powered compliant knee exoskeleton | |
| US9498623B2 (en) | Rehabilitation system | |
| US9387112B2 (en) | Myoelectric hand orthosis | |
| CN108290037B (zh) | 电极定位系统及方法 | |
| JPH09507764A (ja) | 盲人および高度の視覚障害者のための像認識装置 | |
| Pioggia et al. | Exploring emotional and imitational android-based interactions in autistic spectrum disorders | |
| JP5317536B2 (ja) | 装着型人支援装置 | |
| JP2004329490A (ja) | 指運動機能回復支援具および指運動機能回復支援システム | |
| Ishiguro | Android science | |
| Lontis et al. | Wheelchair control with inductive intra-oral tongue interface for individuals with tetraplegia | |
| CN113616923A (zh) | 一种生物反馈电刺激与镜像结合手功能康复装置 | |
| Kiguchi et al. | Neuro-fuzzy based motion control of a robotic exoskeleton: considering end-effector force vectors | |
| Decker et al. | A hand exoskeleton device for robot assisted sensory-motor training after stroke | |
| KR102386359B1 (ko) | 동작 상상에 따른 뇌파를 이용하는 로봇 제어 시스템 및 제어 방법 | |
| CN213607940U (zh) | 一种手功能障碍康复系统 | |
| JP4608656B2 (ja) | 肢体機能回復支援装置 | |
| JP7693184B2 (ja) | リハビリテーション支援装置及びリハビリテーション支援方法 | |
| Ong et al. | Recent developments of robotic exoskeletons for hand rehabilitation | |
| JP2004254876A (ja) | 運動機能補助装置及び方法 | |
| Jayatilake et al. | A wearable robot mask to support rehabilitation of facial paralysis | |
| CN118253008A (zh) | 丰富环境联合康复机器人的康复方法、系统、设备 | |
| JP7531813B2 (ja) | リハビリテーション支援システム、プログラム及び制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110701 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130108 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20130304 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130304 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130709 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5317536 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |