JP5300541B2 - Loading platform lifting device and method for removing the same - Google Patents
Loading platform lifting device and method for removing the same Download PDFInfo
- Publication number
- JP5300541B2 JP5300541B2 JP2009064616A JP2009064616A JP5300541B2 JP 5300541 B2 JP5300541 B2 JP 5300541B2 JP 2009064616 A JP2009064616 A JP 2009064616A JP 2009064616 A JP2009064616 A JP 2009064616A JP 5300541 B2 JP5300541 B2 JP 5300541B2
- Authority
- JP
- Japan
- Prior art keywords
- load receiving
- platform
- loading platform
- main body
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Abstract
Description
本発明は、車両に取り付けられ荷物の積み降ろしに利用される荷受台昇降装置およびその取り外し方法に関する。 The present invention relates to a load receiving table lifting device which is attached to a vehicle and used for loading and unloading loads and a method for removing the load receiving table lifting device.
貨物車両に取り付けられ、荷物の積み降ろしに利用される荷受台昇降装置として、例えば特許文献1に記載のものがある。この荷受台昇降装置は、車両の荷台上に固定されたベースブラケットと、荷物を載せる荷受台と、荷受台を起伏回動可能に支持している支持体と、支持体を支持しているともにベースブラケットに上下回動可能に取り付けているアームとを備えており、アームを上下回動させることにより荷受台を地上と荷台上との間で昇降させることができる。
また、荷物の積み降ろしを行なわない車両走行時には、荷受台を荷台上へ上昇させ、荷受台を支持体に対して回動させることで当該荷受台を起立させた状態とする。これにより、荷受台昇降装置を荷台上でコンパクトに格納することができる(特許文献1)。
For example,
Further, when the vehicle travels without loading / unloading of the load, the load receiving platform is raised on the loading platform, and the load receiving platform is rotated with respect to the support body so as to stand up. Thereby, the load receiving platform lifting device can be stored compactly on the load receiving platform (Patent Document 1).
しかし、このような荷受台昇降装置は車両の荷台上に常設されているため、例えば軽量の荷物を人力で積み降ろしする場合など荷受台昇降装置を使用しない場合においても、荷台上に荷受台昇降装置が存在している状態にある。このため、荷台上における荷物の積み込みスペースが減少するという問題があった。 However, since such a loading platform lifting device is permanently installed on the loading platform of the vehicle, for example, when loading and unloading a light load manually, even when the loading platform lifting device is not used, the loading platform lifting and lowering device is lifted on the loading platform. The device is in an existing state. For this reason, there has been a problem that the space for loading luggage on the loading platform is reduced.
そこで、本発明は前記問題点に鑑みてなされたものであり、荷受台昇降装置の不使用時に荷台上における荷物の積み込みスペースが減少するのを防止することができる荷受台昇降装置およびその取り外し方法を提供することを目的とする。 Accordingly, the present invention has been made in view of the above-described problems, and a load receiving platform lifting apparatus capable of preventing a load loading space on the loading platform from being reduced when the load receiving platform lifting apparatus is not used, and a method for removing the same. The purpose is to provide.
本発明の荷受台昇降装置は、車両の荷台上に取り付けられる装置本体を備えている荷受台昇降装置であって、前記装置本体は、荷物を載せる荷受台と、前記荷受台を支持している支持体と、前記支持体を支持しているアーム体と、前記荷受台を前記荷台上方の上位置と地上に接地する接地位置との間で昇降可能となるように前記アーム体を上下回動可能に支持しているベース部と、を有し、前記ベース部を前記荷台上に固定するとともに当該固定を解除可能な固定手段を備え、前記固定手段は、前記荷受台を前記接地位置とした接地状態において前記装置本体と干渉しない位置に配置され、前記装置本体が、前記接地状態で前記固定手段による固定を解除したときに前記地上で自立することを特徴とする。 The load receiving platform lifting apparatus according to the present invention is a load receiving platform lifting apparatus including a device main body mounted on a vehicle loading platform, and the device main body supports a load receiving platform on which a load is placed and the load receiving platform. The arm body is rotated up and down so that it can be moved up and down between a support body, an arm body supporting the support body, and a grounding position where the load receiving platform is grounded to the ground. A base portion that supports the base portion, and includes a fixing means that fixes the base portion on the loading platform and can release the fixing, and the fixing means sets the loading platform to the grounding position. It is arranged at a position where it does not interfere with the apparatus main body in the grounding state, and the apparatus main body is self-supporting on the ground when the fixing by the fixing means is released in the grounding state .
本発明の荷受台昇降装置によれば、装置本体のベース部を固定手段により車両の荷台上に固定および固定解除可能としたので、荷受台昇降装置の不使用時に荷受台昇降装置を荷台上から取り外すことができる。このため、荷台上における荷物の積み込みスペースが減少するのを防止することができる。
また、接地状態において装置本体と干渉することなく固定手段による固定を解除することができるので、荷受台昇降装置を接地させた状態で取り外すことができる。このため、取り外された荷受台昇降装置の全体を荷台から地上へ降ろす作業が不要になる。
また、接地状態で固定手段による固定を解除したときに装置本体が接地状態から倒れるのを防止することができるので、荷受台昇降装置の取り外し作業を安全に行うことができる。
According to the load receiving platform lifting apparatus of the present invention, the base portion of the apparatus body can be fixed and released on the vehicle loading platform by the fixing means, so that the load receiving platform lifting apparatus can be removed from the loading platform when the load receiving platform lifting apparatus is not used. Can be removed. For this reason, it can prevent that the loading space of the load on a loading platform reduces.
Further, since the fixing by the fixing means can be released without interfering with the apparatus main body in the grounded state, the load receiving platform lifting device can be removed while being grounded. For this reason, the operation | work which lowers the removed cradle raising / lowering apparatus to the ground from a cradle becomes unnecessary.
Moreover, since the apparatus main body can be prevented from falling from the grounded state when the fixing by the fixing means is released in the grounded state, the work for removing the load receiving platform lifting device can be performed safely.
本発明の荷受台昇降装置によれば、車両の荷台上に取り付けられる装置本体を備えている荷受台昇降装置であって、前記装置本体は、荷物を載せる荷受台と、前記荷受台を支持している支持体と、前記支持体を支持しているアーム体と、前記荷受台を前記荷台上方の上位置と地上に接地する接地位置との間で昇降可能となるように前記アーム体を上下回動可能に支持しているベース部と、を有し、前記ベース部を前記荷台上に固定するとともに当該固定を解除可能な固定手段を備え、前記支持体が、前記荷受台を水平姿勢と起立姿勢との間で起伏可能に支持しており、前記固定手段は、前記荷受台を前記上位置で前記起立姿勢とした格納状態において前記装置本体と干渉しない位置に配置されていることを特徴とする。本発明の荷受台昇降装置によれば、格納状態において装置本体と干渉することなく固定手段による固定を解除することができるので、荷受台昇降装置を起立格納させたコンパクトな状態で取り外すことができる。このため、荷受台昇降装置の取り外し作業を省スペースで行うことができる。 According to the load receiving platform lifting apparatus of the present invention, a load receiving platform lifting apparatus including a device main body mounted on a vehicle loading platform, the device main body supporting a load receiving platform on which a load is placed, and the load receiving platform. The arm body is moved up and down so that the arm body can be moved up and down between an upper position above the loading platform and a grounding position for grounding to the ground. A base part rotatably supporting the base part, and a fixing means for fixing the base part on the cargo bed and releasing the fixation, wherein the support body has a horizontal posture. has undulating movably supported between a standing position, the fixing means, characterized in that it is arranged at a position not interfering with the apparatus main body in the storage state in which said standing position by said on position said receiving platform And According to the load receiving platform lifting apparatus of the present invention, since the fixing by the fixing means can be released without interfering with the apparatus main body in the retracted state, the load receiving lift lifting apparatus can be removed in a compact state in which it is stood and stored. . For this reason, the removal work of the load receiving table lifting device can be performed in a space-saving manner.
また、前記装置本体が、前記格納状態で前記固定手段による固定を解除したときに前記荷台上で自立することが好ましい。この場合は、格納状態で固定手段による固定を解除したときに装置本体が荷台上から倒れるのを防止することができるので、荷受台昇降装置の取り外し作業を安全に行うことができる。 Moreover, it is preferable that the apparatus main body is self-supporting on the loading platform when the fixing by the fixing means is released in the storage state. In this case, it is possible to prevent the apparatus main body from falling from above the loading platform when the fixation by the fixing means is released in the retracted state, so that the removal operation of the loading platform lifting device can be performed safely.
また、前記荷受台昇降装置は、前記接地状態で前記固定手段による固定を解除したときに、前記装置本体を当該接地状態で保持可能な保持部材をさらに備えていることが好ましい。この場合は、接地状態で固定手段による固定を解除したときに保持部材により装置本体を接地状態で保持することができるので、荷受台昇降装置の取り外し作業を安全に行うことができる。 Moreover, it is preferable that the said cargo receiving platform raising / lowering apparatus is further provided with the holding member which can hold | maintain the said apparatus main body in the said grounding state, when the fixation by the said fixing means is cancelled | released in the said grounding state. In this case, since the apparatus main body can be held in the grounded state by the holding member when the fixing by the fixing means is released in the grounded state, the work for removing the load receiving table lifting device can be performed safely.
また、本発明は、荷物を載せる荷受台と、前記荷受台を支持している支持体と、前記支持体を支持しているアーム体と、前記荷受台を車両の荷台上方の上位置と地上に接地する接地位置との間で昇降可能となるように前記アーム体を上下回動可能に支持しているとともに前記荷台上に固定されているベース部と、を有する装置本体を備えている荷受台昇降装置を前記荷台上から取り外す方法であって、前記荷受台を前記上位置で前記起立姿勢とした格納状態から固定手段による前記ベース部の固定を解除し、前記装置本体を前記荷台上から取り外すことを特徴とする。この場合は、荷受台昇降装置の不使用時に荷受台昇降装置を荷台上から取り外すことができるので、荷台上における荷物の積み込みスペースが減少するのを防止することができる。 The present invention also provides a load receiving platform on which a load is placed, a support body that supports the load receiving table, an arm body that supports the support body, an upper position above the load platform of the vehicle, and a ground surface. A load receiver comprising an apparatus main body having a base portion that supports the arm body so as to be vertically movable so as to be able to move up and down with respect to a grounding position that contacts the ground, and is fixed on the loading platform. A method for removing a platform lifting device from the loading platform, wherein the base is fixed by a fixing means from a retracted state in which the loading platform is in the upright position at the upper position, and the device body is removed from the loading platform. It is characterized by removing. In this case, since the load receiving platform lifting device can be removed from the loading platform when the load receiving platform lifting device is not used, it is possible to prevent a load space for loading on the loading platform from being reduced.
また、本発明は、荷物を載せる荷受台と、前記荷受台を支持している支持体と、前記支持体を支持しているアーム体と、前記荷受台を車両の荷台上方の上位置と地上に接地する接地位置との間で昇降可能となるように前記アーム体を上下回動可能に支持しているとともに前記荷台上に固定されているベース部と、を有する装置本体を備えている荷受台昇降装置を前記荷台上から取り外す方法であって、前記荷受台を前記接地位置まで下降させて接地状態とし、前記接地状態で固定手段による前記ベース部の固定を解除することで、前記装置本体を前記地上で自立させた状態とし、前記装置本体を前記荷台上から取り外すことを特徴とする。この場合は、荷受台昇降装置を接地させた状態で取り外すことができるので、取り外された荷受台昇降装置の全体を荷台から地上へ降ろす作業が不要になる。 The present invention also provides a load receiving platform on which a load is placed, a support body that supports the load receiving table, an arm body that supports the support body, an upper position above the load platform of the vehicle, and a ground surface. A load receiver comprising an apparatus main body having a base portion that supports the arm body so as to be vertically movable so as to be able to move up and down with respect to a grounding position that contacts the ground, and is fixed on the loading platform. A method of removing a platform lifting device from the loading platform, wherein the loading platform is lowered to the grounding position to be in a grounded state, and in the grounded state, the fixing of the base portion by the fixing means is released , and the apparatus body And the apparatus main body is removed from the cargo bed. In this case, since it can be removed while the load receiving platform lifting device is grounded, it is not necessary to lower the entire removed load receiving platform lifting device from the loading platform to the ground.
また、本発明は、荷物を載せる荷受台と、前記荷受台を支持している支持体と、前記支持体を支持しているアーム体と、前記荷受台を車両の荷台上方の上位置と地上に接地する接地位置との間で昇降可能となるように前記アーム体を上下回動可能に支持しているとともに前記荷台上に固定されているベース部と、作動流体を給排することにより前記アーム体を上下回動させる流体アクチュエータを有する昇降駆動機構と、を有する装置本体を備えている荷受台昇降装置を前記荷台上から取り外す方法であって、前記荷受台を前記流体アクチュエータにより前記接地位置まで下降させて接地状態とし、前記接地状態における前記流体アクチュエータ内の作動流体圧により、前記ベース部に対して当該ベース部を上方へ押し上げる方向に外力を作用させ、前記外力を作用させた状態で固定手段による前記ベース部の固定を解除し、前記装置本体を前記荷台上から取り外すことを特徴とする。
この場合は、接地状態における流体アクチュエータ内の作動流体圧により、ベース部に上方へ押し上げる方向の外力が作用するので、この状態で固定手段によるベース部の固定を解除したときに、ベース部を荷台の上方に浮かせることができる。したがって、接地状態において固定解除されたベース部を荷台上から持ち上げる作業が不要になるので、荷受台昇降装置の取り外し作業を容易に行うことができる。
The present invention also provides a load receiving platform on which a load is placed, a support body that supports the load receiving table, an arm body that supports the support body, an upper position above the load platform of the vehicle, and a ground surface. The arm body is supported so as to be able to move up and down so that it can be moved up and down with respect to a grounding position where it contacts the ground, and the base portion fixed on the loading platform and the working fluid are supplied and discharged, thereby A lifting / lowering drive mechanism having a fluid actuator for rotating the arm body up and down, and a method of removing a load receiving platform lifting / lowering device having an apparatus main body from the loading platform, wherein the load receiving platform is moved to the grounding position by the fluid actuator. The grounding state is lowered to a grounding state, and an external force is applied in a direction to push the base portion upward with respect to the base portion by the working fluid pressure in the fluid actuator in the grounding state. Is allowed, to release the said base portion by the fixing means in a state in which the action of the external force, characterized in that removing the device body from the said loading platform.
In this case, an external force in the upward direction acts on the base portion due to the working fluid pressure in the fluid actuator in the grounded state. Therefore, when the base portion is fixed by the fixing means in this state, the base portion is Can be floated above. This eliminates the need to lift the base part, which has been released from the fixed state in the grounding state, from the loading platform, so that it is possible to easily remove the loading platform lifting device.
本発明によれば、荷受台昇降装置の不使用時に、荷受台昇降装置を荷台上から取り外すことができるため、荷台上における荷物の載置スペースが減少するのを防止することができる。 According to the present invention, since the load receiving device lifting device can be removed from the load carrier when the load receiving device lifting device is not used, it is possible to prevent the load placement space on the load carrier from being reduced.
以下、本発明の実施の形態を図面に基づいて説明する。
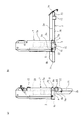
図1、図2、図3および図4は、本発明の荷受台昇降装置の一実施形態を示す側面図である。図5は、図4に示した状態にある荷受台昇降装置の背面図である。この荷受台昇降装置1は、貨物車両Cの荷台11上に取り付けられる装置本体Uを備えており、地上と荷台11上との間で荷物の積み降ろしを行なうために利用されるものである。荷台11上の後端部には、車両走行時に起立した状態とする後部の煽戸(開閉扉)10が設けられている。また、図5において、荷台11上の車幅方向の側端部には、車両走行時に起立した状態とする側部の煽戸20が設けられている。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
1, FIG. 2, FIG. 3 and FIG. 4 are side views showing an embodiment of the load receiving table lifting device of the present invention. FIG. 5 is a rear view of the load receiving table lifting device in the state shown in FIG. 4. The load receiving platform lifting / lowering
これら煽戸10,20それぞれは、荷台11の縁部に設けられたヒンジによって上下方向に回動して開閉可能となっていて、閉状態で荷台11の縁部から立ち上がった状態(図4と図5参照)となり、開状態で、荷台11の縁部から下方へ垂れ下がった状態となる(図1〜図3参照)。また、荷台11には、起立した煽戸10,20をその起立姿勢で固縛する固縛部(図示せず)が設けられている。固縛部は、使用者によって操作され、煽戸10,20を起立姿勢(閉状態)に拘束する固縛状態と、開状態可能とする解除状態とのいずれかに切り替えられる。なお、図5では、後部の煽戸10は開状態にある。煽戸10,20は、鋼板等によって製造されている。
Each of these
荷受台昇降装置1の装置本体Uは、荷物を載せる荷受台2を備えており、この荷受台2は、荷物を載せる載置面2aを表面に有する盤状の荷受台本体21を有している。図示している装置本体Uは、荷台11の上面11aの後端部に取り付けられており、荷受台2は、荷台11の後端部の上方の上位置と、車両後方において地上に接地する接地位置との間を昇降する。車両前後方向が、図1〜図3の状態にある荷受台2の奥行き方向と一致しており、車幅方向(車両Cの左右方向)が、荷受台2の幅方向と一致している。
The apparatus main body U of the load receiving platform lifting / lowering
装置本体Uは、荷受台2の他に、荷台11の上面11aに取り付けられるベースブラケット(ベース部)3と、荷受台2を支持している支持体7と、ベースブラケット3と支持体7とを連結しているアーム体4と、伸縮するリフトシリンダ5と、このリフトシリンダ5を駆動するパワーユニット6とを備えている。ベースブラケット3、アーム体4および支持体7は、荷台11の後部において、車幅方向の一方側の端部に設けられている(図5参照)。そして、荷受台2は車幅方向の中央寄りの位置に設けられている。
In addition to the
前記ベースブラケット3は、固定手段としてのボルト12およびナット体27により、荷台11の上面11aの後部に固定および固定解除可能に取り付けられている。これにより、装置本体Uの貨物車両Cへの取り付けが簡単であり、また、貨物車両C側において、ボルト孔を形成すればよく、大きな改造が不要である。
The
前記アーム体4は、第一アーム13と第二アーム14とを有しており、平行リンクを構成している。第一アーム13は、ベースブラケット3から一方向に延びている部材であり、第一アーム13の基部13aはベースブラケット3の上部に回動可能に取り付けられており、先部13bは支持体7(後述する側部支持フレーム7a)の上部に回動可能に取り付けられている。第二アーム14は、ベースブラケット3から第一アーム13に沿って延びている部材であり、第二アーム14の基部14aはベースブラケット3に回動可能に取り付けられており、先部14bは支持体7(側部支持フレーム7a)に回動可能に取り付けられている。
The
そして、アーム体4は、ベースブラケット3から上方へ延びている起立位置(図1)と、車両後方でかつ地上へ向かう斜め下方に延びている後方位置(図3)との間を揺動することができる。このアーム体4によって、支持体7および荷受台2は、荷台11後部の上面11aより上方の上位置(図1)と車両後方において地上に接地する接地位置(図3)との間を昇降することができる。また、図1〜図3に示しているように、アーム体4は平行リンクを構成していることから、荷受台2(荷受台本体21)を水平姿勢としたまま昇降させることができる。
The
図5において、荷受台2は、表面が荷物を載せる載置面2aとなる前記荷受台本体21と、この荷受台本体21に取り付けられた第一の支持部材22とを有している。この支持部材22は、荷受台2の幅方向に直線的に延びている部材であり、荷受台本体21の裏面側に固定されていて、荷受台本体21の側部からさらに外側方へ一部が突出している部材である。また、荷受台本体21の裏面には、第二の支持部材23が設けられている。この支持部材23は、荷受台本体21の幅方向寸法と略同じ長さである。図示している形態では、支持部材22,23は中空の角パイプによって構成されていて、荷受台本体21の幅方向の梁部材(強度部材)として機能している。
In FIG. 5, the
前記支持体7は、側部支持フレーム7aを有しており、この側部支持フレーム7aの下部に、ヒンジ部8を介して前記第一の支持部材22が取り付けられている。側部支持フレーム7aは、縦長の箱形状であり、アーム体4およびリフトシリンダ5を格納し、かつ、アーム体4およびリフトシリンダ5を機能させるために車両前方に開口している。
The
図6は前記ヒンジ部8を説明する説明図である。ヒンジ部8は、荷受台2を姿勢変化可能として支持体7に取り付けている。ヒンジ部8は、側部支持フレーム7aに固定された第一ブラケット部8aと、支持部材22に固定された第二ブラケット部8bと、第二ブラケット部8bを第一ブラケット部8aに回動自在として取り付けているヒンジ軸8cとを有している。ヒンジ軸8cの中心線は水平でかつ荷受台2の幅方向である。このヒンジ部8により、支持部材22に固定された荷受台本体21は、側部支持フレーム7aに対して水平軸心a回りに起伏回動自在となる。これにより、荷受台2を荷物の積み降ろしに利用しない車両走行時に、荷受台本体21は荷台11上の上位置で起立姿勢となり、(図4、図6(a)参照)、荷物の積み降ろし作業時に荷受台本体21は水平姿勢となることができる(図1、図6(b)参照)。
FIG. 6 is an explanatory view for explaining the
図1において、第一の支持部材22は、水平姿勢にある荷受台本体21の奥行き方向(車両前後方向)の中間部に取り付けられている。なお、荷受台本体21が起立姿勢にある場合(図4参照)は、高さ方向の中間部である。そして、この支持部材22に前記ヒンジ部8が取り付けられていることから、側面視において、荷受台2の回動中心(水平軸心a)は、荷受台本体21の奥行き方向の中間部に位置する。この構成により、荷受台本体21の内の、前記水平軸心aよりも車両前方側の部分(荷受台2の基端部2b側の部分)は、荷受台2が起立した姿勢(図4参照)で、当該水平軸心aよりも下方に位置する。このように、荷受台本体21の一部を、水平軸心aよりも下方でかつ荷台11の上面11aの上方に位置させるために、荷台11の上面11aからの第一の支持部材22の設置位置は高く設定されている。具体的には、図4に示しているように、起立させた煽戸10の上部と対向する高さ位置に支持部材22が存在するように、装置本体Uは構成されている。
In FIG. 1, the
そして、荷物の積み降ろしを行なう使用状態(図1〜図3の状態)とするためには、荷受台2をヒンジ部8で回動させ、荷受台本体21を水平姿勢として載置面2aが上を向く状態とする。図6において、荷受台本体21を水平姿勢に維持するために、ヒンジ部8の第一ブラケット部8aと第二ブラケット8bとの間に接触部9aおよび被接触部9bとが設けられている。図6では、ボルトからなる接触部9aが第二ブラケット部8bに設けられていて、荷受台本体21が水平姿勢となると、この接触部9a(ボルトの頭)が、第一ブラケット部8aの一部(被接触部9b)に当接する。これにより、荷受台本体21が水平姿勢を越えて回動し過ぎることを規制している。
And in order to make it the use state (state of FIGS. 1-3) which loads and unloads a load, the
そして、荷台11上の上位置にあって水平姿勢にある荷受台2をヒンジ部8において90°回動させて起立させることにより、図4および図6(a)に示しているように、荷受台2は側部支持フレーム7aに対して折り畳まれた格納状態となる。この状態では、荷受台2の基端部2bが下位置となり、先端部2cが上位置となり、基端部2bと先端部2cとが同一鉛直面上に配置される。
Then, as shown in FIG. 4 and FIG. 6 (a), the
また、図5において、装置本体Uは、荷受台2を前記起立姿勢で維持するための起立ロック装置17を有している。この起立ロック装置17は、起立姿勢にある荷受台2が前方および後方へ倒れる方向に回動することを規制している。具体的には、図7に示すように、起立ロック装置17は、荷受台2に設けられた係合部材17aと、支持体7に設けられた被係合部材17bとを有しており、係合部材17aおよび荷受台2の側端縁が、被係合部材17bに一体形成された前板部17b1と後板部17b2との間に挿入することにより、荷受台2は起立姿勢で維持される。
Further, in FIG. 5, the apparatus main body U has a standing
係合部材17aは、弾性部材(バネ)17cにより常に係合方向(図7の矢符b方向)に付勢されている。このため、荷受台2を上方回動させて起立姿勢となる直前で、係合部材17aの先端に形成された傾斜面(図示せず)が被係合部材17bの後板部17b2に当接することによって、弾性部材17cの付勢力を抗して係合方向と逆方向へ移動しながら、その後板部17b2を乗り越える。そして、係合部材17aは、被係合部材17bを乗り越えると、弾性部材17cの付勢力により係合方向へ押されて前板部17b1と後板部17b2との間に挿入される。すなわち、起立ロック装置17は、荷受台2を起立姿勢まで上方回動させたときに、荷受台2を自動的に起立姿勢で維持するロック状態となる。これにより、係合部材17aが後板部17b2に当接することにより、起立姿勢の荷受台2が前方へ倒れるのを規制することができる。また、荷受台2の前面(載置面2a)が前板部17b1に固定されたクッションゴム17b3に当接することにより、荷受台2が前方へ倒れるのを規制することができる。
また、起立ロック装置17は、係合部材17aを被係合部材17bから抜き挿し動作させる操作杆17dを有している。作業者がこの操作杆17dを操作(押し引き)することで、前記ロック状態と、このロック状態を解除する非ロック状態とに切り替えることができる。
The engaging
Further, the standing
本発明の荷受台昇降装置1は、装置本体Uが荷台11から取り外し可能となっているため、装置本体Uには、当該装置本体Uをクレーンなどで吊り下げるための吊り部材が設けられる。具体的には、図7において、起立ロック装置17の被係合部材17bの上部にアイボルトからなる吊り部材17eが取り付けられるようになっている。すなわち、被係合部材17bの上部にネジ孔17b4が形成され、このネジ孔17b4に吊り部材17eが着脱可能に固定される。この構成によれば、図15に示すように、吊り部材17eにクレーン19のフック19aを係合させることができ、装置本体Uを吊り下げることが可能となる。そして、荷受台2を格納状態に維持する起立ロック装置17を、吊り部材17eを取り付けるブラケットとして兼用していることから、部品点数を削減し、製造コストを低減することができる。
In the load receiving platform lifting / lowering
さらに、図5において、装置本体Uは、荷受台2を水平姿勢で維持するための水平ロック装置18を有している。この水平ロック装置18は、水平姿勢にある荷受台本体21が起立姿勢となる方向に回動することを規制している。このロック装置18は作業者によって操作され、荷受台2を水平姿勢に維持するロック状態と、このロック状態を解除する非ロック状態とに切り替えられる。具体的には、図8に示すように、水平ロック装置18は、荷受台2に設けられた係合部材18aと、支持体7に設けられた被係合部材18bとを有しており、係合部材18aが被係合部材18bに係合することにより、荷受台2は水平姿勢で維持される。
Furthermore, in FIG. 5, the apparatus main body U has the
係合部材18aは、弾性部材(バネ)18cにより常に係合方向(図8の矢符c方向)に付勢されている。このため、荷受台2を下方回動させて水平姿勢となる直前で、係合部材18aが被係合部材18bの下方から接近(図8の矢符d方向に移動)し、係合部材18aの先端に形成された傾斜面18a1が被係合部材18bに当接しながらその被係合部材18bを乗り越える。そして、係合部材18aは、被係合部材18bを乗り越えると、弾性部材18cの付勢力により係合方向へ押されて被係合部材18bに係合される。すなわち、水平ロック装置18は、荷受台2を水平姿勢まで下方回動させたときに、荷受台2を自動的に水平姿勢で維持するロック状態となる。なお、この状態で荷受台2を下降させて接地位置とした場合には、支持体7が接地位置の荷受台2に対してヒンジ部8を中心に後方へ倒れる方向へ回動することも規制することができる。
また、水平ロック装置18は、係合部材18aを被係合部材18bに係脱させる操作杆18dを有している(図5参照)。作業者がこの操作杆18dを操作(押し引き)することで、前記ロック状態と、このロック状態を解除する非ロック状態とに切り替えることができる。
The engaging
Further, the
図1〜図3において、前記リフトシリンダ5は、荷受台2を昇降させるために伸縮する複動式の油圧シリンダ(流体アクチュエータ)であり、アーム体4と支持体7との間に取り付けられている。リフトシリンダ5の一端部5aは、第一アーム13に回動自在として取り付けられており、リフトシリンダ5の他端部5bは、側部支持フレーム7aの下部に回動自在として取り付けられている。
前記パワーユニット6は、リフトシリンダ5を伸縮させる油圧ユニットであり、パワーユニット6とリフトシリンダ5とにより、荷受台2を昇降駆動する昇降駆動機構Lを構成している。
1 to 3, the
The
パワーユニット6がリフトシリンダ5に対して作動油(作動流体)の供給の切り替えを行なうことにより、リフトシリンダ5は伸縮動作を行うことができる。パワーユニット6の動作は、パワーユニット6に設けられている図示していない制御装置によって制御される。作業者が側部支持フレーム7に設けられた操作部7e(図5参照)を操作することにより、前記制御装置がパワーユニット6に所定の動作を行なわせる。
When the
図9は、前記昇降駆動機構Lの油圧回路図を示すものである。パワーユニット6は、作動油を溜めるタンクT、作動油を吐出させるためのポンプ40、このポンプ40を駆動する正逆回転可能なモータ41、タンクT内の作動油をポンプ40に供給するための切換弁42と、リフトシリンダ5のヘッド側室5cおよびロッド側室5dの各作動油がポンプ40側へ排出(供給)されるのを規制する規制手段43としての2個の逆止弁(パイロットチェックバルブ)43a,43bと、4個のリリーフ弁44a〜44dと、逆止弁付き絞り弁45と、緊急用切換弁46とを一体として備えている油圧ユニットであり、このパワーユニット6は、リフトシリンダ5とともに側部支持フレーム7aに取り付けられている。
FIG. 9 shows a hydraulic circuit diagram of the lifting drive mechanism L. As shown in FIG. The
前記切換弁42は三位置電磁弁からなり、モータ41を停止させているときは、図9に示すように、左右のバネ42aおよび42bの各付勢力が均等に作用することにより、中立位置42Nの状態に保持されている。
この状態から、リフトシリンダ5を伸長させる際は、モータ41を正転させ、ポンプ40の吐出口(この場合は図9の左側)から吐出される作動油を、逆止弁43aを介してヘッド側室5cに供給する。このとき、前記作動油のパイロット圧が切換弁42の左位置42Lおよび逆止弁43bに作用することにより、切換弁42が左位置42Lに切り換わるとともに逆止弁43bが開いて作動油が図9の上側から下側へ流れるのを許容する。これにより、ロッド側室5d内の作動油が逆止弁43bを介してポンプ40の吸込口(この場合は図9の右側)に供給されるとともに、タンクTの作動油が油路47から吸い上げられて切換弁42を介してポンプ40の吸込口に供給され、リフトシリンダ5が伸長動作する。
The switching
In this state, when the
また、リフトシリンダ5を収縮させる際は、モータ41を逆転させ、ポンプ40の吐出口(この場合は図9の右側)から吐出される作動油を、逆止弁43bを介してロッド側室5dに供給する。このとき、前記作動油のパイロット圧が切換弁42の右位置42Rおよび逆止弁43aに作用することにより、切換弁42が右位置42Rに切り換わるとともに逆止弁43aが開いて作動油が図9の上側から下側へ流れるのを許容する。これにより、ヘッド側室5c内の作動油が逆止弁43aを介してポンプ40の吸込口(この場合は図9の左側)に供給されるとともに、タンクTの作動油が油路47および切換弁42を介してポンプ40の吸込口に供給され、リフトシリンダ5が収縮動作する。
さらに、モータ41を停止してポンプ40の駆動を停止すると、切換弁42には作動油のパイロット圧が作用しなくなり、切換弁42は左右のバネ42aおよび42bの各付勢力により中立位置42Nに切り換わる。この状態において、リフトシリンダ5の両側室5c,5d内の各作動油は、逆止弁43aおよび43bにより、ポンプ42側へ排出されるのを規制することができる。
Further, when the
Further, when the
この昇降駆動機構Lによれば、上述のようにパワーユニット6によりリフトシリンダ5を収縮動作させると、アーム体4が上方回動して地上にあった荷受台2(図3)が支持体7とともに上昇し、図2の状態を経て、図1のように荷受台2を荷台11の上方の上位置へと上昇させることができる。そして、パワーユニット6によりリフトシリンダ5を伸長動作させると、アーム体4が下方回動して荷受台2が支持体7とともに上位置から地上へと下降する。この昇降駆動機構Lにより、荷受台2に載せた荷物を地上と荷台11上との間で積み降ろすための昇降動作が実行される。
According to this lifting drive mechanism L, when the
また、パワーユニット6の駆動を停止すると、逆止弁43a,43bにより、リフトシリンダ5のヘッド側室5cおよびロッド側室5d内の作動油がポンプ40側へ排出されるのが規制される。これにより、各側室5c,5d内の作動油圧によって、アーム体4を任意の回動位置で保持させることができる。したがって、荷受台2を上位置および接地位置とした状態においてパワーユニット6の駆動を停止することにより、逆止弁43a,43bは、アーム体4を前記各位置の回動位置に保持させることができる回動保持手段としての機能も兼ねている。
When the driving of the
そして、上位置にある荷受台2をヒンジ部8によって前記水平軸線a回りに回動させることで、荷受台2を起立姿勢(図4参照)に変化させることができる。この状態で、貨物車両Cは走行可能となる。また、貨物車両Cを走行させる際に、煽戸10を起立させ、荷台11の後部を閉状態としている。この状態において、荷受台2に裏面側に固定された当接部15が、起立している煽戸10の上部に当接することにより、上位置で起立姿勢にある荷受台2の基端部2bが、車両Cの走行中の振動等によりバタつくのを防止している。この当接部15は、ゴム,樹脂,木材等の非金属製であって、図5に示すように荷受台2の裏面側の四箇所に固定されており、水平姿勢にある荷受台2が地上に降りた際に当該地上に接触して荷受台2と地上との干渉を防止する緩衝部材としても機能している(図3参照)。
And the
図10は、荷受台昇降装置1と車体側バッテリBとの間の電気配線図である。装置本体Uのアーム体4の第一アーム13または第二アーム14は中空のパイプ部材によって構成されている。図10では、第一アーム13が断面円形のパイプ部材である。第一アーム13をパイプ部材とすることにより、車両Cに搭載されているバッテリBと装置本体Uのパワーユニット6とを接続する電源ケーブルYを、ベースブラケット3から第二アーム14内を通し側部支持フレーム7aへ導き出すことができる。荷台11の上面11aのうちベースブラケット3の直下部分には、バッテリBから延び上面11aの下を通る前記ケーブルYを、ベースブラケット2および第二アーム14へ導き出すための孔(図示せず)が形成されている。また、前記ケーブルYは、荷台2側のケーブルY1と装置本体U側のケーブルY2とからなり、両ケーブルY1およびY2は、接続部16により断接可能に接続されている。このため、装置本体Uを荷台2上から取り外す際に、荷台2側のケーブルY1と装置本体U側のケーブルY2とを分離することができる。
FIG. 10 is an electrical wiring diagram between the load receiving
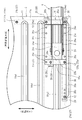
装置本体Uの荷台11上への取り付け構造について説明する。図11および図12は、荷台11上にベースブラケット3を固定する前記固定手段の平面図、およびその固定手段を分解した斜視図である。荷台11の上面11aには、凸部11a1が車両前後方向に延びて形成されている。凸部11a1は、車幅方向に複数、間隔が設けられて配設されている。この凸部11a1は、荷台11の補強リブとして機能し、主として荷台11の車両前後方向の曲げ力に対抗することができる。
A structure for mounting the apparatus main body U on the
ベースブラケット3は、アーム体4の基部を取り付けているブラケット本体部25と、このブラケット本体部25を荷台11に固定する基礎部26とを有している。基礎部26は、荷台11上に載せられる水平面上に配置された面状部材であり、ブラケット本体部25は、この基礎部26から上に立ち上がっている部材である。
The
具体的には、ブラケット本体部25は、幅方向に対向した一対の側壁部25a、前壁部25b、後壁部25c、リブ板25dを有している。側壁部25aにアーム体4の基部が軸部材によって取り付けられる。基礎部26は、前後の第一および第二平板部26a,26bと、左右の第三、第四平板部26c,26dとを有している。前部の第一平板部26aと前壁部25bとは、一枚の板がL字形に曲げられて形成されている(他の平板部及び壁部についても同様である。)そして、ベースブラケット3を構成する部材は鋼材からなり、各部材が溶接によって組み立てられており、ブラケット本体部25と基礎部26とは、一体ものとして構成されている。
Specifically, the bracket
図11において、基礎部26には、上下方向に貫通したボルト孔26eが複数(図11は11個)形成されている。ボルト孔26eの数は、充分な固定強さを有してベースブラケット3を荷台11に固定するために必要なボルト12の数(図11では4本)よりも多く設けられている。以下、このボルト12の数を、ボルト必要数と言う。また、ボルト必要数は、4以上が好ましく、ボルト孔26eの数よりも少ないのが好ましい。
In FIG. 11, the
図12において、荷台11には、前記ボルト12を貫通するためのボルト孔11bが形成されている。そして、装置本体U(ベースブラケット3)を荷台11に固定するための固定手段は、第一の固定部材としての前記ボルト12と、第二の固定部材としてのナット体27とを備えている。ナット体27は、1個のナット27aと、3個のナットプレート27b,27c,27dにより構成されている。ナットプレート27bは、車幅方向に長く、ボルト12を取り付けるための複数(図12では6個)のネジ孔27b1が形成されている。このナットプレート27bは、荷台11の下であって車両最後部に配置されており、その一端部(荷台11の車幅方向内側端部)は、ネジ孔27b1にボルト12を取り付け、荷台11に固定されている。他のナットプレート27c,27dについても同様にネジ孔27c1,27d1が形成されている。
In FIG. 12, a
本実施の形態では、ナット27aおよびナットプレート27cとボルト12とにより基礎部26の第一平板部26aを、ナットプレート27bとボルト12とにより基礎部26の第二平板部26bを、ナットプレート27bおよび27dとボルト12とにより後述する補強板30を、それぞれ荷台11に固定している。これにより、装置本体Uを、荷台11に取り付けることができる。なお、装置本体Uを荷台11上から取り外す際に、第二平板部26bおよび補強板30を固定しているボルト12をナットプレート27bから外しても、ナットプレート27bの一端は、上述のように荷台11に固定されているため、ナットプレート27bが紛失するのを防止することができる(図14参照)。
In the present embodiment, the
前記装置本体Uの構成によれば、ベースブラケット3は、アーム体4を介して、荷受台2を昇降可能に搭載しており、当該荷受台2の荷重および荷受台2上の荷物の荷重を支持するものである。このため、荷受台2を昇降させる際に、ベースブラケット3が前記荷重によって車両後方(図11の右側)へ倒れるのを防止するものとして、ベースブラケット3と荷台11の上面11aとの間に補強板30が設けられている。
According to the configuration of the apparatus main body U, the
補強板30は、断面略Z型の鋼板をベースブラケット3の前後長さよりも車両前後方向に長く形成されたものである。補強板30の下端に形成された下水平部30aは、基礎部26の第三平板部26cと、荷台11の上面11aとの間に介在しており、ボルト12とナットプレート27b,27dとにより荷台11上に固定されている。下水平部30aにはボルト12の直径よりも充分に大きな孔が貫通して形成されている。補強板30の上端に形成された上水平部30bと荷台11の上面11aとの間には作業者の手を差し込み可能なスペースが形成されており、装置本体Uを荷台11上から取り外す際に、上水平部30bを装置本体Uを持ち上げるための取手として使用される。
なお、ベースブラケット3が前記荷重によって車幅方向の内側(図11の上側)に倒れるのを防止する補強部材としては、車幅方向に延びて荷台11下に固定されている前記ナットプレート27bが、その機能を兼用している。
The reinforcing
As a reinforcing member for preventing the
前記固定手段は、ベースブラケット3の固定のために、複数の座板28および複数の調節板29を有している。座板28は、荷台11の上面11aと基礎部26との間に介在するものであり、特に上面11aのうちの前記凸部11a1が存在していない平坦面部の上に載せられ、前記ボルト12と前記ナット体27との結合部に配設される。座板28にはボルト12の直径よりも充分に大きな孔が厚さ方向に貫通して形成されている。また、座板28の厚さは、前記平坦面部からの凸部11a1の高さ寸法と同じか当該寸法よりも小さく設定されている。このため、前記寸法よりも小さい場合には、調節板29で座板28の高さを調節するようになっている。調節板29にはボルト12の直径よりも充分に大きな溝が厚さ方向に貫通して形成されている。図12では、車幅方向内側の前後の座板28と基礎部26との間に調節板29が取り付けられている。これにより、ベースブラケット3を、座板28および調節板29を介して、ボルト12とナット体27との間に強固に締め付けることができ、ベースブラケット3を荷受台2に安定して固定することができる。
The fixing means includes a plurality of
各ボルト12およびナット体27は、前記格納状態および水平姿勢の荷受台2を地上に接地させた接地状態(図3)において、装置本体U(ベースブラケット3、アーム体4、支持体7、昇降駆動機構L、および荷受台2)と干渉しない位置に配置されている。すなわち、各ボルト12の上方には、各ボルト12を着脱する際に工具や作業者の手を挿入することができる着脱スペースが設けられている。これにより、各ボルト12およびナット体27を、装置本体Uと干渉することなく外すことができるので、装置本体Uを格納状態および接地状態において、荷台11上から取り外すことができる。
また、前記格納状態および接地状態において、前記各ボルト12をナット体27から外したときに、装置本体Uが荷台11の上面11aで自立するように装置本体Uを構成する各機器が所定の位置に配置され、装置本体Uの重心G位置が設定されている(図14,図17参照)。
Each
Further, in the retracted state and the grounded state, when the
次に、荷台11上に固定されている装置本体Uを荷台11から取り外す方法について、格納状態から取り外す場合と、接地状態から取り外す場合とに分けて、それぞれ図面を参照しながら詳しく説明する。
まず、使用状態にある装置本体Uを格納状態から取り外す場合は、ポンプ40を駆動させてリフトシリンダ5を収縮動作させ、荷受台2を上位置まで上昇させる(図1参照)。上昇後は、ポンプ40の駆動を停止させ、リフトシリンダ5内の作動油が逆止弁43a,43bによりポンプ40側へ排出されるのを規制する(図9参照)。
Next, a method for removing the apparatus main body U fixed on the
First, when removing the apparatus main body U in use from the retracted state, the
この状態から、手動操作により水平ロック装置18をロック解除し、荷受台2を水平姿勢から起立姿勢まで回動させて格納状態とする(図4参照)。その際、荷受台2は、起立ロック装置17により自動的に起立姿勢で維持されたロック状態となる。また、アーム体4は、リフトシリンダ5内の作動油圧によって、ベースブラケット3に対する回動が規制され、格納状態の回動位置に保持される。
From this state, the
ついで、図13に示すように、電源ケーブルYの接続部16を切り離し、装置本体U側のケーブルY2の接続端部を、荷台11上に引き抜く。そして、各ボルト12をナット27aおよびナットプレート27b〜27dから外し、荷台11に対するベースブラケット3の固定を解除する。その際、各ボルト12の上方には、着脱スペースが設けられているため、各ボルト12は、装置本体Uと干渉することなく荷台11の上方へ引き出すことができる。
すると、装置本体Uは、図14に示すように、荷受台2の自重により、車両Cの右舷側に若干傾き、荷受台2の右下の角部が荷台11の上面11aに当接した状態となる。これにより、装置本体Uは、荷台11上に自立した状態で保持される。
Next, as shown in FIG. 13, the
Then, as shown in FIG. 14, the apparatus main body U is slightly inclined toward the starboard side of the vehicle C due to the weight of the
この自立した状態において、図7に示すように、吊り部材17eを支持体7側(被係合部材17b)に取り付ける。そして、図15に示すように、この吊り部材17eにクレーン19のフック19aを係合させ、装置本体Uを、クレーン19により吊り下げて荷台11上から地上に降ろす。これにより、格納状態にある装置本体Uの取り外し作業が完了する。
In this self-supporting state, as shown in FIG. 7, the
なお、クレーン19を支持体7側に係合する作業は、ベースブラケット3の固定解除後に行っているが、ベースブラケット3の固定解除前に行ってもよい。この場合、前記固定解除後に格納状態で保持されている装置本体Uに外力が作用しても、装置本体Uが倒れるのを防止することができ、その取り外し作業を安全に行うことができる。
また、クレーン19により装置本体Uを地上へ降ろしているが、人力で降ろすことも可能である。この場合、補強板30の上水平部30bを取手として使用することができるので、装置本体Uを容易に持ち上げることができる。
In addition, although the operation | work which engages the
Moreover, although the apparatus main body U is lowered to the ground by the
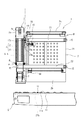
次に、格納状態にある装置本体Uを接地状態から取り外す場合について説明する。まず、煽戸10を開状態にするとともに、起立ロック装置17を手動操作によりロック解除し、起立姿勢にある荷受台2を、手動操作により水平姿勢まで回動させる(図1参照)。その際、荷受台2は、水平ロック装置18により自動的に水平姿勢で維持されたロック状態となる。この状態から、ポンプ40を駆動しリフトシリンダ5を伸長動作させると、荷受台2は水平姿勢を維持しながら下降する。
Next, the case where the apparatus main body U in the retracted state is removed from the ground state will be described. First, the
荷受台2が接地位置まで移動すると(図3参照)、さらに、リフトシリンダ5を伸長動作させる。このとき、荷受台2は接地しているのでそれ以上下降することはないが、リフトシリンダ5内の作動油圧により、アーム体4の基部がその先部を中心として上方へ回動しようとする。このため、アーム体4の基部に接続されているベースブラケット3には上方へ押し上げる方向に外力が作用する。このように外力を作用させた後は、ポンプ40の駆動を停し、リフトシリンダ5内の作動油が逆止弁43a,43bによりポンプ40側へ排出されるのを規制する(図9参照)。これにより、アーム体4は、リフトシリンダ5内の作動油圧によって、支持体7に対する回動が規制され、接地状態の回動位置に保持される。
When the
ついで、図16に示すように、電源ケーブルYの接続部16を切り離し、装置本体U側のケーブルY2の接続端部を、荷台11上に引き抜く。そして、各ボルト12をナット27aおよびナットプレート27b〜27dから外し、荷台11に対するベースブラケット3の固定を解除する。その際、各ボルト12の上方には、着脱スペースが設けられているため、各ボルト12は、アーム体4等の装置本体Uと干渉することなく荷台11の上方へ引き出すことができる。
すると、図17に示すように、ベースブラケット3には上述のようにリフトシリンダ5内の作動油圧により上方へ押し上げる外力が作用しているため、リフトシリンダ5が若干伸長することにより、ベースブラケット3は荷台11の上面11aから上方へ少し浮いた状態となる。この状態において、装置本体Uは、接地状態で自立した状態となるため、車両前後方向および車幅方向に倒れることなく荷受台2を地上に載置した安定した状態で保持される。したがって、この状態から車両Cを前方へ移動させることにより、装置本体Uを荷台11から取り外すことができる。
Next, as shown in FIG. 16, the
Then, as shown in FIG. 17, since the external force that pushes upward by the hydraulic pressure in the
接地状態で取り外された装置本体Uは、その持ち運びを容易にするためにコンパクトに折り畳むことができる。以下、その手順について詳しく説明する。まず、図17の接地位置にある荷受台2上に支持体7を折り畳む。具体的には、操作杆18dを手動操作することにより、ロック状態の水平ロック装置18を非ロック状態に切り替える(図5,図8参照)。すると、支持体7はヒンジ部8を中心として荷受台2に対して回動可能となるので、図18に示すように、手動操作により支持体7を、アーム体4およびベースブラケット3とともに後方(図18の矢符e方向)へ回動させ、荷受台2上に折り畳む。その際、荷受台2と地上との間に枕木(図示せず)を配置しておけば、その回動作業を容易に行うことができる。
The apparatus main body U removed in the grounded state can be folded compactly in order to facilitate its carrying. The procedure will be described in detail below. First, the
さらに、この状態から、支持体7上にアーム体4を折り畳む。具体的には、装置本体U側のケーブルY2を、荷台2側のケーブルY1を介してもしくは直接バッテリBに一時的に再接続し、または商用電源等の外部電源に一時的に接続し、リフトシリンダ5を収縮動作させる。すると、図19に示すように、アーム体4の基部は、その先部を中心としてベースブラケット3とともに前方(図19の矢符f方向)へ回動し、支持体7上に折り畳まれた状態となる。これにより、装置本体Uは図4の格納状態と同じコンパクトな状態となるため、その持ち運びを容易に行うことができる。なお、装置本体Uの取り外しスペースが広い場合には、装置本体Uの折り畳み作業は不要である。
Further, from this state, the
以上、本発明の実施形態に係る荷受台昇降装置1によれば、装置本体Uのベースブラケット3を、ボルト12とナット体27とにより、貨物車両Cの荷台11上に固定および固定解除可能としたので、荷受台昇降装置1の不使用時に荷受台昇降装置1を荷台11上から取り外すことができる。このため、荷台11上における荷物の積み込みスペースが減少するのを防止することができる。これは、貨物車両Cが、荷台11上の積み込みスペースが比較的小さい軽トラックである場合に特に有効となる。
As described above, according to the load receiving platform lifting / lowering
また、前記格納状態で装置本体Uと干渉することなくボルト12をナット体27から外すことができるので、荷受台昇降装置1をコンパクトな格納状態で取り外すことができる。このため、荷受台昇降装置1の取り外し作業を省スペースで行うことができる。
また、前記格納状態でボルト12をナット体27から外したときに、装置本体Uが荷台11上で自立するので、ボルト12を外した際に、荷受台昇降装置1が荷台11上から倒れるのを防止することができる。このため、荷受台昇降装置1の取り外し作業を安全に行うことができる。
Moreover, since the volt | bolt 12 can be removed from the
Further, when the
また、ボルト12は、前記接地状態で装置本体Uと干渉することなくボルト12をナット体27から外すことができるので、荷受台昇降装置1を接地状態で取り外すことができる。このため、取り外された荷受台昇降装置1の全体を荷台11上から地上へ降ろす作業が不要になる。
また、前記接地状態でボルト12をナット体27から外したときに、装置本体Uが地上で自立するので、ボルト12を外した際に、荷受台昇降装置1が接地状態から倒れるのを防止することができる。このため、荷受台昇降装置1の取り外し作業を安全に行うことができる。
Moreover, since the volt | bolt 12 can remove the volt | bolt 12 from the
In addition, when the
また、前記接地状態において荷台11に固定されているベースブラケット3には、リフトシリンダ5内の作動油圧により、上方へ押し上げる方向に外力が作用するので、ボルト12とナット体27によるベースブラケット3の固定を解除したときに、ベースブラケット3を荷台11の上方に少し浮かせた状態で保持することができる。したがって、固定解除されたベースブラケット3を荷台11上から持ち上げる作業が不要になるので、荷受台昇降装置1の取り外し作業を容易に行うことができる。
In addition, an external force is applied to the
図20は、本発明の他の実施形態による荷受台昇降装置の側面図である。以下、この実施形態について詳しく説明する。なお、この実施形態のうち、前記実施形態と同一構成であるものは、前記実施形態と同一符号で示す。
荷受台昇降装置50は、前記接地状態においてベースブラケット3を荷台11から取り外した際に荷受台昇降装置50の装置本体Uを接地状態で保持する保持部材51を備えている。保持部材51は、前後一対の脚部52と、装置本体Uのアーム体4を下方から支持する支持部53と、前記両脚部52と支持部53とを連結する連結部54とを有している。各脚部52は、上下方向に長く形成されており、その上端部は連結部54に設けられた回転軸54aにより相互に回動自在に連結されている。また、各脚部52は、その中間部に水平方向に延びるネジ部材52aが回転自在に連結されており、ネジ部材52aの端部には操作レバー52bが取り付けられている。この操作レバー52bを回転操作することにより、両脚部52を回転軸54aを中心として回動させることができ、両脚部52間の回動角度θを調節することができる。
FIG. 20 is a side view of a load receiving table lifting apparatus according to another embodiment of the present invention. Hereinafter, this embodiment will be described in detail. In addition, in this embodiment, what has the same configuration as that of the above embodiment is indicated by the same reference numeral as that of the above embodiment.
The load receiving
支持部53は、上方に開口(図示せず)を有するコ字型のチャネル材により形成されおり、前記連結部54に固定されている。支持部53は、前記接地状態において、第二アーム14の長手方向の略中央部を、下方から支持するようになっている。また、操作レバー52bにより前記回動角度θを変更することにより、支持部53の上下方向の高さを調節することができる。
The
次に、接地状態にある装置本体Uを荷台11から取り外す方法について、図20を参照しながら説明する。まず、前記実施形態と同様に、荷受台2を前記接地位置まで下降させる。この状態から、第二アーム14の長手方向の略中央部の下方に、保持部材51を配置する。その際、保持部材51の支持部53が第二アーム14と干渉しないように、操作レバー52bを手動操作して両脚部52の回動角度θを大きくし、支持部53の高さを予め低くしておく。
Next, a method for removing the apparatus body U in the grounded state from the
ついで、操作レバー52bを手動で回転操作し、前記回動角度θを小さくして支持部材53を上方へ移動させ、接地状態の回動位置にある第二アーム14を下方から当接させて支持する。この状態から、前記実施形態と同様に、電源ケーブルYの接続部16を切り離し、装置本体U側のケーブルY2の接続端部を、荷台11上に引き抜く。そして、各ボルト12をナット27aおよびナットプレート27b〜27dから外し、荷台11に対するベースブラケット3の固定を解除する(図16参照)。その際、装置本体Uは、保持部材51により接地状態で保持されているため、前方へ倒れることなく安定した状態(接地状態)で保持される。
Next, the
したがって、この状態から車両Cを前方へ移動させることにより、荷装置本体Uを荷台11から取り外すことができる。その後は、前記実施形態と同様に荷受台2上に、支持体7およびアーム体4を折り畳むことにより、保持部材51は不要になるため、装置本体Uがコンパクトな状態となり、その持ち運びを容易に行うことができる。なお、この実施形態では、保持部材51は、アーム体4の第二アーム14を支持しているが、第一アーム13を支持するようにしてもよい。
Therefore, the loading apparatus body U can be removed from the
以上、この実施形態によれば、前記接地状態でボルト12をナット体27から外したときに、装置本体Uのアーム体4を持部材51により保持するようにしたので、装置本体Uに外力が作用しても、装置本体Uが接地状態から前方へ倒れるのを防止することができる。また、装置本体Uが接地状態で自立しない場合や、アーム体4を接地状態の回動位置に保持することができない場合にも有効である。
As described above, according to this embodiment, since the
なお、本発明の荷受台昇降装置は、上記各実施形態に限らず本発明の範囲内において他の形態のものであっても良い。例えば、各実施形態では、ボルト12を荷台11上に配置し、ナット体27を荷台11下方に配置しているが、両者を上下逆に配置してもよい。また、固定手段としては、ボルト12とナット体27とを用いているが、ベースブラケット3を固定および固定解除可能であれば、その他の固定構造を用いてもよい。
また、装置本体Uを格納状態および接地状態のいずれの状態においても自立するようになっているが、いずれか一方の状態のときに自立するようにしてもよい。
In addition, the load receiving platform lifting / lowering device of the present invention is not limited to the above-described embodiments, and may have other forms within the scope of the present invention. For example, in each embodiment, the
In addition, the apparatus main body U is self-supporting in both the retracted state and the grounded state, but may be self-supporting in either state.
さらに、上記各実施形態では、リフトシリンダ5内の作動油が排出されるのを規制する規制手段43として、パイロットチェックバルブからなる逆止弁43a,43bを用いているが、通常のチェックバルブからなる逆止弁や、作動油の流れを断接可能な切換弁を用いることも可能である。
また、上記各実施形態では、荷受台昇降装置1(50)を荷台11の後部左端に設置し、荷受台2が車両後方に下降する場合を説明したが、その取り付け位置は他の部分であってもよく、例えば、荷受台2が車両の側方へ下降するように、荷受台昇降装置1を取り付けてもよい。
また、上記各実施形態では、シリンダ5をアーム体4と支持体7との間に取り付けているが、ベースブラケット3とアーム体4と間に取り付けることも可能である。
Further, in each of the above embodiments, the
In each of the above embodiments, the case has been described in which the load receiving platform lifting / lowering device 1 (50) is installed at the rear left end of the
In each of the above embodiments, the
1,50 荷受台昇降装置
2 荷受台
3 ベース部
4 アーム体
5 リフトシリンダ(流体アクチュエータ)
7 支持体
11 荷台
12 ボルト(固定手段)
27 ナット体(固定手段)
51 保持部材
C 貨物車両(車両)
L 昇降駆動機構
U 装置本体
1,50 Loading
7
27 Nut body (fixing means)
51 Holding member C Cargo vehicle (vehicle)
L Lifting drive mechanism U Device body
Claims (7)
前記装置本体は、荷物を載せる荷受台と、前記荷受台を支持している支持体と、前記支持体を支持しているアーム体と、前記荷受台を前記荷台上方の上位置と地上に接地する接地位置との間で昇降可能となるように前記アーム体を上下回動可能に支持しているベース部と、を有し、
前記ベース部を前記荷台上に固定するとともに当該固定を解除可能な固定手段を備え、
前記固定手段は、前記荷受台を前記接地位置とした接地状態において前記装置本体と干渉しない位置に配置され、
前記装置本体が、前記接地状態で前記固定手段による固定を解除したときに前記地上で自立することを特徴とする荷受台昇降装置。 A load receiving platform lifting device having a device main body mounted on a vehicle loading platform,
The apparatus main body includes a load receiving platform on which a load is placed, a support body that supports the load receiving table, an arm body that supports the support body, and the load receiving table that is grounded to an upper position above the loading platform and to the ground. A base portion that supports the arm body so as to be able to move up and down so as to be able to move up and down with respect to the grounding position.
A fixing means for fixing the base portion on the loading platform and capable of releasing the fixing ;
The fixing means is disposed at a position that does not interfere with the apparatus main body in a grounding state in which the load receiving table is the grounding position,
The load receiving device elevating device , wherein the device main body is self-supporting on the ground when the fixing by the fixing means is released in the grounded state .
前記装置本体は、荷物を載せる荷受台と、前記荷受台を支持している支持体と、前記支持体を支持しているアーム体と、前記荷受台を前記荷台上方の上位置と地上に接地する接地位置との間で昇降可能となるように前記アーム体を上下回動可能に支持しているベース部と、を有し、
前記ベース部を前記荷台上に固定するとともに当該固定を解除可能な固定手段を備え、
前記支持体が、前記荷受台を水平姿勢と起立姿勢との間で起伏可能に支持しており、
前記固定手段は、前記荷受台を前記上位置で前記起立姿勢とした格納状態において前記装置本体と干渉しない位置に配置されていることを特徴とする荷受台昇降装置。 A load receiving platform lifting device having a device main body mounted on a vehicle loading platform,
The apparatus main body includes a load receiving platform on which a load is placed, a support body that supports the load receiving table, an arm body that supports the support body, and the load receiving table that is grounded to an upper position above the loading platform and to the ground. A base portion that supports the arm body so as to be able to move up and down so as to be able to move up and down with respect to the grounding position.
A fixing means for fixing the base portion on the loading platform and capable of releasing the fixing;
The support body supports the load receiving table so that it can rise and fall between a horizontal posture and a standing posture,
It said securing means receiving platform lifting device, characterized in that disposed in a position that does not interfere with the apparatus main body in the storage state in which said standing position by the on position the receiving platform.
前記荷受台を前記上位置で前記起立姿勢とした格納状態から固定手段による前記ベース部の固定を解除し、
前記装置本体を前記荷台上から取り外す
ことを特徴とする荷受台昇降装置の取り外し方法。 A load receiving platform on which a load is placed; a support that supports the load receiving platform; an arm that supports the support; an upper position above the loading platform of the vehicle; and a grounding position that contacts the ground. A load receiving platform lifting device including a device main body having a base portion that supports the arm body so as to be capable of moving up and down between the base body and is fixed on the loading platform. It is a method of removing from the top,
Releasing the fixing of the base portion by the fixing means from the retracted state in which the load receiving stand is in the upright position at the upper position;
Remove the device body from the loading platform
A method for removing the cargo receiving platform lifting device .
前記荷受台を前記接地位置まで下降させて接地状態とし、
前記接地状態で固定手段による前記ベース部の固定を解除することで、前記装置本体を前記地上で自立させた状態とし、
前記装置本体を前記荷台上から取り外す
ことを特徴とする荷受台昇降装置の取り外し方法。 A load receiving platform on which a load is placed; a support that supports the load receiving platform; an arm that supports the support; an upper position above the loading platform of the vehicle; and a grounding position that contacts the ground. A load receiving platform lifting device including a device main body having a base portion that supports the arm body so as to be capable of moving up and down between the base body and is fixed on the loading platform. It is a method of removing from the top,
Lower the load receiving table to the grounding position to be in a grounded state,
By releasing the fixing of the base portion by the fixing means in the grounding state, the device main body is in a state of being self-supporting on the ground ,
Remove the device body from the loading platform
A method for removing the cargo receiving platform lifting device .
前記荷受台を前記流体アクチュエータにより前記接地位置まで下降させて接地状態とし、
前記接地状態における前記流体アクチュエータ内の作動流体圧により、前記ベース部に対して当該ベース部を上方へ押し上げる方向に外力を作用させ、
前記外力を作用させた状態で固定手段による前記ベース部の固定を解除し、
前記装置本体を前記荷台上から取り外す
ことを特徴とする荷受台昇降装置の取り外し方法。 A load receiving platform on which a load is placed; a support that supports the load receiving platform; an arm that supports the support; an upper position above the loading platform of the vehicle; and a grounding position that contacts the ground. The arm body is supported so as to be vertically movable so that it can be moved up and down, and the arm body is vertically rotated by supplying and discharging a working fluid, and a base portion fixed on the loading platform. A lifting drive mechanism having a fluid actuator to be removed, and a method of removing a loading platform lifting device including a device main body from the loading platform,
The load receiving table is lowered to the grounding position by the fluid actuator to be in a grounding state,
Due to the working fluid pressure in the fluid actuator in the grounding state, an external force is applied to the base portion in a direction to push the base portion upward,
Releasing the fixing of the base by the fixing means in a state where the external force is applied;
The method of removing the loading platform lifting device, wherein the device main body is removed from the loading platform.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009064616A JP5300541B2 (en) | 2009-03-17 | 2009-03-17 | Loading platform lifting device and method for removing the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009064616A JP5300541B2 (en) | 2009-03-17 | 2009-03-17 | Loading platform lifting device and method for removing the same |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010215116A JP2010215116A (en) | 2010-09-30 |
| JP5300541B2 true JP5300541B2 (en) | 2013-09-25 |
Family
ID=42974415
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009064616A Active JP5300541B2 (en) | 2009-03-17 | 2009-03-17 | Loading platform lifting device and method for removing the same |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5300541B2 (en) |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3003740U (en) * | 1994-04-30 | 1994-11-01 | 株式会社サンワ | Lifting transfer device |
| JPH07304376A (en) * | 1994-05-13 | 1995-11-21 | Nisshin Jidosha Kogyo:Kk | Transfer device |
-
2009
- 2009-03-17 JP JP2009064616A patent/JP5300541B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010215116A (en) | 2010-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103832310B (en) | Wheel supporting mounting assembly | |
| US6910731B2 (en) | Skid steer loader with front pivoting cab having a no tool latch | |
| US9656587B2 (en) | Tiltloader for transferring cargo | |
| JP4615555B2 (en) | Lamp device and in-vehicle mobile vehicle inspection system having the lamp device | |
| US20130075353A1 (en) | Foldable Lifting Apparatus | |
| US7901174B2 (en) | Tiltable loading system and extendable platform for transferring cargo | |
| JP2011102517A (en) | Method and device for supporting work attachment front member | |
| US20190210852A1 (en) | Personnel Basket for Overhead Cranes | |
| US20090115238A1 (en) | Truck Bed Lifting Device and Method | |
| JP5300541B2 (en) | Loading platform lifting device and method for removing the same | |
| JP5225784B2 (en) | Loading platform lifting device | |
| JP2007237783A (en) | Vehicle with elevating device and elevating device | |
| JP5427376B2 (en) | Loading platform lifting device | |
| JP2007076484A (en) | Folding type cargo platform and underfloor storing type elevator device | |
| JP6955805B1 (en) | truck | |
| JP4272895B2 (en) | Vehicle door mounting and holding device | |
| JP2019048540A (en) | Dump truck | |
| JP2010023822A (en) | Load receiving platform elevator | |
| JP5301324B2 (en) | Loading platform lifting device and loading platform removal method | |
| JP7075151B1 (en) | truck | |
| JP2016022869A (en) | Tailgate lifter device | |
| CN219117018U (en) | Quick winding and unwinding devices for water supply pipe transformation | |
| JP5202996B2 (en) | Loading platform lifting device | |
| JP3875699B2 (en) | Retractable loading platform lifting device | |
| JP4050165B2 (en) | Lamp device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130319 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130517 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130618 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5300541 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |