JP5260770B2 - Engine control device - Google Patents
Engine control device Download PDFInfo
- Publication number
- JP5260770B2 JP5260770B2 JP2012128290A JP2012128290A JP5260770B2 JP 5260770 B2 JP5260770 B2 JP 5260770B2 JP 2012128290 A JP2012128290 A JP 2012128290A JP 2012128290 A JP2012128290 A JP 2012128290A JP 5260770 B2 JP5260770 B2 JP 5260770B2
- Authority
- JP
- Japan
- Prior art keywords
- cylinder
- air
- angular acceleration
- cylinders
- cyl
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



































Abstract
Description
本発明は、エンジンの制御装置に関し、特に、気筒間の燃料量ばらつきと空気量ばらつきの双方を検出・補正する制御装置に関する。 The present invention relates to an engine control device, and more particularly to a control device that detects and corrects both fuel amount variation and air amount variation between cylinders.
地球環境問題を背景に、自動車に対する低排気化、低CO2化(低燃費化)の要求が更に高まってきている。エンジンの高性能化を目的に、可変動弁の採用など、エンジンに供給する燃料量と空気量を独立に制御する機構を持つエンジンが普及しつつある。このようなエンジンにおいては、燃料量と空気量を独立に制御する性能を、実用環境でも保証する必要がある。 Against the backdrop of global environmental problems, demands for lower emissions and lower CO 2 (lower fuel consumption) for automobiles are increasing. For the purpose of improving engine performance, engines having a mechanism for independently controlling the amount of fuel and air supplied to the engine, such as the adoption of a variable valve, are becoming widespread. In such an engine, it is necessary to guarantee the performance of independently controlling the fuel amount and the air amount even in a practical environment.
特許文献1には、目標空燃比と実空燃比の所定期間における平均値の差が所定値以上ずれているときに、回転変動に基づいて異常気筒を検出し、燃料噴射量で当該気筒の空燃比を補正する発明が開示されている。
In
燃料量と空気量が独立に制御される機構においては、気筒別に燃料量と空気量がばらつく可能性がある。この場合、気筒間の空燃比ばらつきのみがなくなるように制御すると、気筒間のトルクがばらついてしまい、むしろ、エンジンの安定性(運転性)が悪化することがある。 In a mechanism in which the fuel amount and the air amount are controlled independently, the fuel amount and the air amount may vary from cylinder to cylinder. In this case, if control is performed so as to eliminate only the air-fuel ratio variation between the cylinders, the torque between the cylinders varies, and rather the stability (operability) of the engine may deteriorate.
例えば、意図せず特定の気筒の空気量のみが増加した場合、当該気筒の空燃比のみがリーンになる。これを、当該気筒のみの燃料噴射量を増量することでリーン化を補正した場合、当該気筒のみトルクが大きくなり、安定性が悪化する。 For example, when only the air amount of a specific cylinder increases unintentionally, only the air-fuel ratio of the cylinder becomes lean. If the leaning is corrected by increasing the fuel injection amount of only the cylinder, the torque is increased only for the cylinder and the stability is deteriorated.
本発明は、上記の点に鑑みてなされたものであり、その目的とするところは、誤差原因に応じて、適切に補正を実施し、空燃比ばらつきとトルクばらつきの双方を補正するエンジンの制御装置を提供することにある。 The present invention has been made in view of the above points, and an object of the present invention is to control an engine that appropriately corrects both the air-fuel ratio variation and the torque variation according to the cause of the error. To provide an apparatus.
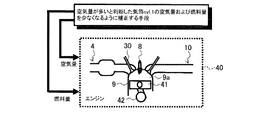
前記目的を達成すべく、本発明に係るエンジンの制御装置の第1態様は、複数の気筒を有するエンジンの制御装置であって、前記各気筒に連通する排気管集合部の実空燃比に基づいて空燃比のフィードバック制御を行う手段と、該空燃比フィードバック制御中に、目標空燃比と実空燃比の差が所定値以下であることを判定する手段と、前記目標空燃比と実空燃比の差が所定値以下であると判定されたときに、前記複数の気筒のうち、クランク軸の角加速度のばらつきがもっとも大きい気筒を検出する手段と、該角加速度のばらつきがもっとも大きい気筒の空燃比をリッチ側に補正し、もしくは前記角加速度のばらつきがもっとも大きい気筒以外の気筒の空燃比をリーン側に補正する手段と、を備えたことを特徴としている(図1を参照)。 In order to achieve the above object, a first aspect of an engine control apparatus according to the present invention is an engine control apparatus having a plurality of cylinders, and is based on an actual air-fuel ratio of an exhaust pipe collecting portion communicating with each cylinder. Means for performing feedback control of the air-fuel ratio, means for determining that the difference between the target air-fuel ratio and the actual air-fuel ratio is not more than a predetermined value during the air-fuel ratio feedback control, Among the plurality of cylinders, when the difference is determined to be equal to or less than a predetermined value, the means for detecting the cylinder with the largest variation in angular acceleration of the crankshaft, and the air-fuel ratio of the cylinder with the largest variation in angular acceleration And a means for correcting the air-fuel ratio of the cylinders other than the cylinder having the largest variation in angular acceleration to the lean side (see FIG. 1).
複数の気筒を有するエンジンにおいて、ある気筒の空燃比がリーンになった場合、各気筒に連通する排気管集合部の空燃比に基づいたフィードバック制御を実施中のとき、排気管集合部の空燃比が目標空燃比(一般に理論空燃比)となるように、全気筒に同じ量だけ燃料噴射量の補正が実施される。 In an engine having a plurality of cylinders, when the air-fuel ratio of a certain cylinder becomes lean, when the feedback control based on the air-fuel ratio of the exhaust pipe collecting portion communicating with each cylinder is being performed, the air-fuel ratio of the exhaust pipe collecting portion The fuel injection amount is corrected by the same amount for all the cylinders so that becomes the target air-fuel ratio (generally the theoretical air-fuel ratio).
排気管集合部の空燃比は、全気筒の排気が十分に混合した後の空燃比を検出することが多い。これは、排気流速が遅い運転領域では、排気管集合部までに他気筒の排気と混合してしまうこと、特定の気筒の感度に影響を受けないような位置に空燃比センサを設置するために、結果的に気筒毎の空燃比を検出しにくくなること、などによる。 In many cases, the air-fuel ratio of the exhaust pipe collecting portion is detected after the exhaust gases of all cylinders are sufficiently mixed. This is because, in the operating region where the exhaust flow rate is slow, the exhaust gas is mixed with the exhaust of other cylinders by the exhaust pipe collecting part, and the air-fuel ratio sensor is installed at a position where it is not affected by the sensitivity of a specific cylinder. As a result, it becomes difficult to detect the air-fuel ratio for each cylinder.
その結果、全気筒の平均空燃比が目標空燃比となるように、全気筒の燃料噴射量を一律に補正するのが、一般的である。したがって、ある気筒がリーンになると、全気筒の平均空燃比もリーン側にずれるため、その分だけ、全気筒の燃料噴射量を一律に増量補正する機能が自動的に働く。 As a result, it is common to uniformly correct the fuel injection amounts of all the cylinders so that the average air-fuel ratio of all the cylinders becomes the target air-fuel ratio. Accordingly, when a certain cylinder becomes lean, the average air-fuel ratio of all cylinders also shifts to the lean side, so that the function of uniformly increasing the fuel injection amount of all cylinders automatically works correspondingly.
その結果、排気管集合部の空燃比(全気筒の平均空燃比)は、目標空燃比にほぼ、収束するが、リーンであった気筒は、リーン度が小さくなるものの、依然として、リーンであり、それ以外の気筒は、むしろリッチになる。 As a result, the air-fuel ratio of the exhaust pipe collecting portion (average air-fuel ratio of all cylinders) almost converges to the target air-fuel ratio, but the lean cylinder is still lean although the lean degree is small. Other cylinders are rather rich.
この運転状態を前提として、第1態様に記載の手段を実施する。すなわち、第1態様に記載の如く、排気管集合部の空燃比に基づいたフィードバック制御を実施中に、目標空燃比と実空燃比の差が所定値以下であることを判定する。 On the premise of this operating state, the means described in the first aspect is implemented. That is, as described in the first aspect, during the feedback control based on the air-fuel ratio of the exhaust pipe collecting portion, it is determined that the difference between the target air-fuel ratio and the actual air-fuel ratio is not more than a predetermined value.
そして、目標空燃比と実空燃比の差が所定値以下であると判定された場合(実空燃比が目標空燃比近傍に収束している)、筒内圧と相関のある角加速度のばらつきを気筒別に検出(演算)する。角加速度のばらつきが大きい気筒をリーン気筒と判断し、当該リーン気筒の空燃比をリッチ側に補正する。 If it is determined that the difference between the target air-fuel ratio and the actual air-fuel ratio is less than or equal to a predetermined value (the actual air-fuel ratio converges near the target air-fuel ratio), the variation in angular acceleration correlated with the in-cylinder pressure is It is detected (calculated) separately. A cylinder having a large variation in angular acceleration is determined as a lean cylinder, and the air-fuel ratio of the lean cylinder is corrected to the rich side.
このとき、排気管集合部の空燃比(全気筒の平均空燃比)は、当該リーン気筒の空燃比をリッチ側に補正した影響で、一時的にリッチ側にずれるが、その分、全気筒一律にリーン側に補正するように、空燃比フィードバック制御が機能するので、その結果、全ての気筒の空燃比が目標空燃比近傍に制御されることになる。あるいは、角加速度のばらつきが大きい気筒以外の気筒の空燃比をリーン側に補正するのもよい。 At this time, the air-fuel ratio (average air-fuel ratio of all cylinders) of the exhaust pipe collecting portion temporarily shifts to the rich side due to the effect of correcting the air-fuel ratio of the lean cylinder to the rich side. Since the air-fuel ratio feedback control functions so as to correct to the lean side, the air-fuel ratios of all the cylinders are controlled in the vicinity of the target air-fuel ratio. Alternatively, it is also possible to correct the air-fuel ratio of the cylinders other than the cylinder having a large variation in angular acceleration to the lean side.
このとき、排気管集合部の空燃比(全気筒の平均空燃比)は、リーン気筒以外の気筒の空燃比をリーン側に補正した影響で、一時的にリーン側にずれるが、その分、全気筒一律にリッチ側に補正するように、空燃比フィードバック制御が機能するので、この場合も、全ての気筒の空燃比が目標空燃比近傍に制御されることになる。 At this time, the air-fuel ratio (average air-fuel ratio of all cylinders) of the exhaust pipe collecting portion temporarily shifts to the lean side due to the effect of correcting the air-fuel ratio of the cylinders other than the lean cylinder to the lean side. Since the air-fuel ratio feedback control functions so as to correct the cylinder uniformly to the rich side, the air-fuel ratio of all the cylinders is also controlled in the vicinity of the target air-fuel ratio in this case.
特定気筒に着目した場合、空燃比のずれは、必ずしも、リーン側にずれるものではないが、リッチ側にずれた場合も、空燃比フィードバック制御により、その他の気筒がリーン側にずれるので、いずれにしてもリーン気筒は発生する。さらに、本制御を頻繁に実施することで、もっともリーンになった気筒のみを逐次補正できるので、その結果、常時、全気筒の空燃比のばらつきを抑制することができる。 When focusing on a specific cylinder, the air-fuel ratio shift does not necessarily shift to the lean side. However, even if it shifts to the rich side, the other cylinders shift to the lean side by the air-fuel ratio feedback control. Even so, lean cylinders are generated. Further, by frequently performing this control, only the leanest cylinder can be corrected sequentially, and as a result, variations in the air-fuel ratio of all cylinders can be suppressed at all times.
本発明に係るエンジンの制御装置の第2態様では、第1態様に記載の前記角加速度のばらつきがもっとも大きい気筒の空燃比をリッチ側に補正する手段が、当該角加速度のばらつきがもっとも大きい気筒の燃料量を増量補正もしくは空気量を減量補正する(図2を参照)。これは、角加速度のばらつきが大きい気筒の空燃比をリッチ補正する方式として、補正対象気筒の燃料量を増量あるいは空気量を減量することを明記するものである。 In a second aspect of the engine control apparatus according to the present invention, the means for correcting the air-fuel ratio of the cylinder having the largest variation in angular acceleration to the rich side described in the first aspect is a cylinder having the largest variation in angular acceleration. The fuel amount is corrected to increase or the air amount is corrected to decrease (see FIG. 2). This clearly specifies that the amount of fuel in the cylinder to be corrected is increased or the amount of air is decreased as a method for richly correcting the air-fuel ratio of a cylinder with large variations in angular acceleration.
本発明に係るエンジンの制御装置の第3態様では、第1態様に記載の前記角加速度のばらつきがもっとも大きい気筒以外の気筒の空燃比をリーン側に補正する手段が、当該角加速度のばらつきがもっとも大きい気筒以外の気筒の燃料量を減量補正もしくは空気量を増量補正する(図3を参照)。これは、角加速度のばらつきが大きい気筒以外の気筒の空燃比をリーン補正する方式として、対象気筒の燃料量を減量あるいは空気量を増量することを明記するものである。 In a third aspect of the engine control apparatus according to the present invention, the means for correcting the air-fuel ratio of the cylinders other than the cylinder having the largest variation in angular acceleration described in the first aspect to the lean side has the variation in angular acceleration. The fuel amount of the cylinders other than the largest cylinder is corrected to decrease or the air amount is corrected to increase (see FIG. 3). This clearly specifies that the fuel amount of the target cylinder is reduced or the air amount is increased as a method for lean correction of the air-fuel ratio of the cylinders other than the cylinder having a large variation in angular acceleration.
本発明に係るエンジンの制御装置の第4態様では、前記構成に加えて、前記角加速度のばらつきがもっとも大きい気筒cyl_1の空燃比を燃料量増量補正によりリッチ側に補正した後、前記燃料量増量補正した気筒cyl_1の角加速度もしくはその平均値と、角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値とを比較する手段と、前記角加速度のばらつきがもっとも大きい気筒cyl_1の角加速度もしくはその平均値が前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値より大きいときは、前記角加速度のばらつきがもっとも大きい気筒cyl_1の空気量が、前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの空気量より多いと判断する手段を備える(図4を参照)。 In a fourth aspect of the engine control apparatus according to the present invention, in addition to the above configuration, after correcting the air-fuel ratio of the cylinder cyl_1 having the largest variation in angular acceleration to the rich side by the fuel amount increase correction, the fuel amount increase A means for comparing the corrected angular acceleration of the cylinder cyl_1 or its average value with the angular acceleration of the cylinder cyl_n other than the cylinder cyl_1 having the largest variation in angular acceleration or its average value, and the cylinder cyl_1 having the largest variation in angular acceleration When the angular acceleration of the cylinder cyl_1 other than the cylinder cyl_1 having the largest variation in angular acceleration is larger than the angular acceleration of the cylinder cyl_n or the average value thereof, the amount of air in the cylinder cyl_1 having the largest variation in angular acceleration is Means is provided for determining that the amount of air in the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in angular acceleration is greater than the air amount (FIG. 4). Reference).
すなわち、第1態様に記載の方式で、角加速度のばらつきがもっとも大きいリーン気筒cyl_1を燃料量増量により補正した後、リーン気筒cyl_1の角加速度もしくはその平均値とリーン気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値とをあらためて比較する。 That is, in the method described in the first aspect, after correcting the lean cylinder cyl_1 having the largest variation in angular acceleration by increasing the fuel amount, the angular acceleration of the lean cylinder cyl_1 or its average value and the angle of the cylinder cyl_n other than the lean cylinder cyl_1 Compare the acceleration or its average value again.
このとき、リーン気筒cyl_1のリーン化の原因が意図せぬ空気量増量であった場合、燃料量増量補正により、リーン気筒cyl_1の空燃比は適正化(目標空燃比近傍に収束)されるものの、リーン気筒cyl_1以外の他の気筒cyl_nと比較して、供給燃料量が多くなるため、発生トルクは大きくなる。 At this time, if the cause of leaning of the lean cylinder cyl_1 is an unintended increase in air amount, the air-fuel ratio of the lean cylinder cyl_1 is optimized (convergence converged near the target air-fuel ratio) by the fuel amount increase correction, Compared with other cylinders cyl_n other than the lean cylinder cyl_1, the amount of fuel to be supplied increases, so the generated torque increases.
すなわち、リーン気筒cyl_1の燃焼時に発生する角加速度は、リーン気筒cyl_1以外の他の気筒cyl_nの燃焼時に発生する角加速度と比較して大きくなる。したがって、リーン気筒cyl_1の角加速度もしくはその平均値がリーン気筒cyl_1以外の他の気筒cyl_nの角加速度もしくはその平均値より大きいときは、リーン気筒cyl_1の空気量が、リーン気筒cyl_1以外の他の気筒cyl_nの空気量より多かったと判断することができる。 That is, the angular acceleration generated during combustion of the lean cylinder cyl_1 is larger than the angular acceleration generated during combustion of the cylinders cyl_n other than the lean cylinder cyl_1. Therefore, when the angular acceleration of the lean cylinder cyl_1 or its average value is larger than the angular acceleration of the other cylinders cyl_n other than the lean cylinder cyl_1 or its average value, the air amount of the lean cylinder cyl_1 is other cylinders than the lean cylinder cyl_1 It can be determined that there was more air than cyl_n.
本発明に係るエンジンの制御装置の第5態様では、前記構成に加えて、前記角加速度のばらつきがもっとも大きい気筒cyl_1の空燃比を空気量減量補正によりリッチ側に補正した後、前記空気量減量補正した気筒cyl_1の角加速度もしくはその平均値と、前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値とを比較する手段と、前記角加速度のばらつきがもっとも大きい気筒cyl_1の角加速度もしくはその平均値が前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値より小さいときは、前記角加速度のばらつきがもっとも大きい気筒cyl_1の燃料量が、前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの燃料量より少ないと判断する手段を備える(図5を参照)。 In a fifth aspect of the engine control apparatus according to the present invention, in addition to the above configuration, after the air-fuel ratio of the cylinder cyl_1 having the largest variation in angular acceleration is corrected to the rich side by the air amount decrease correction, the air amount decrease A means for comparing the corrected angular acceleration of the cylinder cyl_1 or its average value with the angular acceleration of the cylinder cyl_n other than the cylinder cyl_1 having the largest variation in angular acceleration or its average value, and a cylinder having the largest variation in angular acceleration When the angular acceleration of cyl_1 or the average value thereof is smaller than the angular acceleration of the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in angular acceleration or the average value thereof, the fuel amount of the cylinder cyl_1 having the largest variation in angular acceleration is Means for determining that the amount of fuel in the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in angular acceleration is less than the fuel amount Referring to FIG. 5).
すなわち、第1態様に記載の方式で、リーン気筒cyl_1を空気量減量により補正した後、リーン気筒cyl_1の角加速度もしくはその平均値とリーン気筒cyl_1以外の他の気筒cyl_nの角加速度もしくはその平均値をあらためて比較する。 That is, after correcting the lean cylinder cyl_1 by the air amount reduction in the method described in the first aspect, the angular acceleration of the lean cylinder cyl_1 or its average value and the angular acceleration of other cylinders cyl_n other than the lean cylinder cyl_1 or its average value Compare again.
このとき、リーン気筒cyl_1のリーン化の原因が意図せぬ燃料量減量であった場合、空気量減量補正により、リーン気筒cyl_1の空燃比は適正化(目標空燃比近傍に収束)されるものの、リーン気筒cyl_1以外の他の気筒cyl_nと比較して、供給燃料量が少ないため、リーン気筒cyl_1の発生トルクは小さくなる。 At this time, if the cause of leaning of the lean cylinder cyl_1 is an unintended fuel amount reduction, the air-fuel ratio of the lean cylinder cyl_1 is optimized (converges near the target air-fuel ratio) by the air amount reduction correction, Compared to the cylinders cyl_n other than the lean cylinder cyl_1, the amount of fuel supplied is small, so the torque generated in the lean cylinder cyl_1 is small.
すなわち、リーン気筒cyl_1の燃焼時に発生する角加速度は、リーン気筒cyl_1以外の他の気筒cyl_nの燃焼時に発生する角加速度と比較して小さくなる。したがって、リーン気筒cyl_1の角加速度もしくはその平均値がリーン気筒cyl_1以外の他の気筒cyl_nの角加速度もしくはその平均値より小さいときは、リーン気筒cyl_1の燃料量が、リーン気筒cyl_1以外の他の気筒cyl_nの燃料量より少なかったと判断することができる。 That is, the angular acceleration generated during combustion of the lean cylinder cyl_1 is smaller than the angular acceleration generated during combustion of the cylinders cyl_n other than the lean cylinder cyl_1. Therefore, when the angular acceleration of the lean cylinder cyl_1 or its average value is smaller than the angular acceleration of the other cylinders cyl_n other than the lean cylinder cyl_1 or its average value, the fuel amount of the lean cylinder cyl_1 is other cylinders than the lean cylinder cyl_1 It can be determined that the amount of fuel was less than cyl_n.
本発明に係るエンジンの制御装置の第6態様では、前記構成に加えて、前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの空燃比を燃料量減量補正によりリーン側に補正した後、前記角加速度のばらつきがもっとも大きい気筒cyl_1の角加速度もしくはその平均値と前記加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値とを比較する手段と、前記角加速度のばらつきがもっとも大きい気筒cyl_1の角加速度もしくはその平均値が前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値より大きいときは、前記角加速度のばらつきがもっとも大きい気筒cyl_1の空気量が、前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの空気量より多いと判断する手段を備える(図6を参照)。 In the sixth aspect of the engine control apparatus according to the present invention, in addition to the above configuration, after correcting the air-fuel ratio of the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in angular acceleration to the lean side by the fuel amount reduction correction, Means for comparing the angular acceleration of the cylinder cyl_1 having the largest variation in angular acceleration or an average value thereof with the angular acceleration of the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in acceleration, or the average value thereof; When the angular acceleration of the cylinder cyl_1 having the largest or the average value thereof is larger than the angular acceleration or the average value of the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in the angular acceleration, the variation of the cylinder cyl_1 having the largest variation in the angular acceleration is obtained. The amount of air is larger than the amount of air in the cylinders cyl_n other than the cylinder cyl_1 with the largest variation in angular acceleration. Is provided (see FIG. 6).
すなわち、第1態様に記載の方式で、リーン気筒cyl_1以外の気筒cyl_nを燃料量減量により補正した後、リーン気筒cyl_1の角加速度もしくはその平均値とリーン気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値とをあらためて比較する。 That is, after correcting the cylinders cyl_n other than the lean cylinder cyl_1 by the fuel amount reduction in the method described in the first aspect, the angular acceleration of the lean cylinder cyl_1 or its average value and the angular acceleration of the cylinders cyl_n other than the lean cylinder cyl_1 or Compare the average value again.
このとき、リーン気筒cyl_1のリーン化の原因が意図せぬ空気量増量であった場合、リーン気筒cyl_1以外の気筒cyl_nに対して燃料量減量補正を実施することで、空燃比フィードバック制御により全気筒一律に燃料増量(リッチ側に)補正する機能が働くため、リーン気筒cyl_1の空燃比もリッチ側に補正され適正化(目標空燃比近傍に収束)される。 At this time, if the cause of leaning of the lean cylinder cyl_1 is an unintended increase in the air amount, the fuel amount reduction correction is performed for the cylinders cyl_n other than the lean cylinder cyl_1, so that all cylinders are controlled by air-fuel ratio feedback control. Since the function of uniformly correcting the fuel increase (to the rich side) works, the air-fuel ratio of the lean cylinder cyl_1 is also corrected to the rich side and optimized (convergence is made close to the target air-fuel ratio).
しかし、その結果、リーン気筒cyl_1は、リーン気筒cyl_1以外の他の気筒cyl_nと比較して、供給燃料量が多くなるため、発生トルクは大きくなる。すなわち、リーン気筒cyl_1の燃焼時に発生する角加速度は、リーン気筒cyl_1以外の他の気筒cyl_nの燃焼時に発生する角加速度と比較して大きくなる。 However, as a result, the amount of fuel supplied to the lean cylinder cyl_1 is larger than that of the cylinders cyl_n other than the lean cylinder cyl_1, so that the generated torque increases. That is, the angular acceleration generated during combustion of the lean cylinder cyl_1 is larger than the angular acceleration generated during combustion of the cylinders cyl_n other than the lean cylinder cyl_1.
したがって、リーン気筒cyl_1の角加速度もしくはその平均値がリーン気筒cyl_1以外の他の気筒cyl_nの角加速度もしくはその平均値より大きいときは、リーン気筒cyl_1の空気量が、リーン気筒cyl_1以外の他の気筒cyl_nの空気量より多かったと判断することができる。 Therefore, when the angular acceleration of the lean cylinder cyl_1 or its average value is larger than the angular acceleration of the other cylinders cyl_n other than the lean cylinder cyl_1 or its average value, the air amount of the lean cylinder cyl_1 is other cylinders than the lean cylinder cyl_1 It can be determined that there was more air than cyl_n.
本発明に係るエンジンの制御装置の第7態様では、前記構成に加えて、前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの空燃比を空気量増量補正によりリーン側に補正した後、前記角加速度のばらつきがもっとも大きい気筒cyl_1の角加速度もしくはその平均値と前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値を比較する手段と、前記角加速度のばらつきがもっとも大きい気筒cyl_1の角加速度もしくはその平均値が前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値より小さいときは、前記角加速度のばらつきがもっとも大きい気筒cyl_1の燃料量が、前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの燃料量より少ないと判断する手段を備える(図7を参照)。 In a seventh aspect of the engine control apparatus according to the present invention, in addition to the above configuration, after correcting the air-fuel ratio of the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in angular acceleration to the lean side by the air amount increase correction, Means for comparing the angular acceleration of the cylinder cyl_1 having the largest variation in the angular acceleration or the average value thereof with the angular acceleration of the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in the angular acceleration or the average value thereof; When the angular acceleration of the cylinder cyl_1 having the largest or the average value thereof is smaller than the angular acceleration of the cylinder cyl_n other than the cylinder cyl_1 having the largest variation of the angular acceleration or the average value thereof, the variation of the cylinder cyl_1 having the largest variation of the angular acceleration is obtained. The fuel amount is less than the fuel amount of the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in angular acceleration. Means (see FIG. 7).
すなわち、第1態様に記載の方式で、リーン気筒cyl_1以外の気筒cyl_nを空気量増量により補正した後、リーン気筒cyl_1の角加速度もしくはその平均値とリーン気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値とをあらためて比較する。 That is, after correcting the cylinders cyl_n other than the lean cylinder cyl_1 by the air amount increase in the method described in the first aspect, the angular acceleration of the lean cylinder cyl_1 or an average value thereof and the angular acceleration of the cylinders cyl_n other than the lean cylinder cyl_1 or Compare the average value again.
このとき、リーン気筒cyl_1のリーン化の原因が意図せぬ燃料量減量であった場合、リーン気筒cyl_1以外の他の気筒cyl_nに対して、空気量増量補正を実施することで、空燃比フィードバック制御に、全気筒一律に燃料増量(リッチ側に)補正する機能が働くため、リーン気筒cyl_1の空燃比もリッチ側に補正され適正化(目標空燃比近傍に収束)される。 At this time, if the cause of leaning of the lean cylinder cyl_1 is an unintended fuel amount reduction, air-fuel ratio feedback control is performed by performing an air amount increase correction for the cylinders cyl_n other than the lean cylinder cyl_1 In addition, since the function of correcting the fuel increase uniformly (to the rich side) works for all cylinders, the air-fuel ratio of the lean cylinder cyl_1 is also corrected to the rich side and optimized (convergence is converged to the vicinity of the target air-fuel ratio).
しかし、リーン気筒cyl_1は、リーン気筒cyl_1以外の他の気筒cyl_nと比較すると、依然として、供給燃料量が少ないため、発生トルクは小さくなる。すなわち、リーン気筒cyl_1の燃焼時に発生する角加速度は、リーン気筒cyl_1以外の他の気筒cyl_nの燃焼時に発生する角加速度と比較して小さくなる。 However, since the lean cylinder cyl_1 is still less in amount of supplied fuel than the cylinders cyl_n other than the lean cylinder cyl_1, the generated torque is small. That is, the angular acceleration generated during combustion of the lean cylinder cyl_1 is smaller than the angular acceleration generated during combustion of the cylinders cyl_n other than the lean cylinder cyl_1.
したがって、リーン気筒cyl_1の角加速度もしくはその平均値がリーン気筒cyl_1以外の他の気筒cyl_nの角加速度もしくはその平均値より小さいときは、リーン気筒cyl_1の燃料量が、リーン気筒cyl_1以外の他の気筒cyl_nの燃料量より少なかったと判断することができる。 Therefore, when the angular acceleration of the lean cylinder cyl_1 or its average value is smaller than the angular acceleration of the other cylinders cyl_n other than the lean cylinder cyl_1 or its average value, the fuel amount of the lean cylinder cyl_1 is other cylinders than the lean cylinder cyl_1 It can be determined that the amount of fuel was less than cyl_n.
本発明に係るエンジンの制御装置の第8態様では、前記第4態様または第6態様の構成に加えて、前記空気量が多いと判断した気筒cyl_1の空気量および燃料量を少なくなるように補正する手段を備える(図8を参照)。 In the eighth aspect of the engine control apparatus according to the present invention, in addition to the configuration of the fourth aspect or the sixth aspect, correction is made so that the air amount and the fuel amount of the cylinder cyl_1 determined to have a large air amount are reduced. Means (see FIG. 8).
すなわち、第4態様もしくは第6態様において、空気量が多いと判定されたリーン気筒cyl_1の発生トルクと、リーン気筒cyl_1以外の他の気筒cyl_nの発生トルクとの差をなくすために、その原因であるリーン気筒cyl_1の空気量を少なくなるように補正する。このとき、リーン気筒cyl_1の空燃比がリッチにならないように、空気量減量分に応じて、燃料量も少なくするものである。その結果、リーン気筒cyl_1とリーン気筒cyl_1以外の他の気筒cyl_nとの気筒の間に空燃比およびトルクのばらつきがなくなる。 That is, in the fourth aspect or the sixth aspect, in order to eliminate the difference between the generated torque of the lean cylinder cyl_1 determined to have a large amount of air and the generated torque of other cylinders cyl_n other than the lean cylinder cyl_1, Correct the air quantity of a certain lean cylinder cyl_1 to be smaller. At this time, the fuel amount is also reduced in accordance with the air amount reduction so that the air-fuel ratio of the lean cylinder cyl_1 does not become rich. As a result, there are no air-fuel ratio and torque variations between the cylinders of the lean cylinder cyl_1 and the cylinders cyl_n other than the lean cylinder cyl_1.
本発明に係るエンジンの制御装置の第9態様では、前記第4態様または第6態様の構成に加えて、前記空気量が多いと判断した気筒cyl_1の点火時期をリタード側に補正する手段を備える(図9を参照)。 In a ninth aspect of the engine control apparatus according to the present invention, in addition to the configuration of the fourth aspect or the sixth aspect, there is provided means for correcting the ignition timing of the cylinder cyl_1 determined to have a large air amount to the retard side. (See FIG. 9).
すなわち、第4態様もしくは第6態様において、空気量が多いと判定されたリーン気筒cyl_1の発生トルクと、リーン気筒cyl_1以外の他の気筒cyl_nの発生トルクとの差をなくすために、リーン気筒cyl_1の点火時期をリタード側に補正する。その結果、リーン気筒cyl_1とリーン気筒cyl_1以外の他の気筒cyl_nとの間に空燃比およびトルクのばらつきがなくなる。 That is, in the fourth aspect or the sixth aspect, in order to eliminate the difference between the generated torque of the lean cylinder cyl_1 determined to have a large amount of air and the generated torque of other cylinders cyl_n other than the lean cylinder cyl_1, the lean cylinder cyl_1 The ignition timing is corrected to the retard side. As a result, variations in the air-fuel ratio and torque are eliminated between the lean cylinder cyl_1 and the cylinders cyl_n other than the lean cylinder cyl_1.
本発明に係るエンジンの制御装置の第10態様では、前記第5態様または第7態様の構成に加えて、前記燃料量が少ないと判断した気筒cyl_1の空気量および燃料量を多くなるように補正する手段を備える(図10を参照)。 In the tenth aspect of the engine control apparatus according to the present invention, in addition to the configuration of the fifth aspect or the seventh aspect, the air amount and the fuel amount of the cylinder cyl_1 determined to be small are corrected so as to increase. Means (see FIG. 10).
すなわち、第5態様もしくは第7態様において、燃料量が少ないと判定されたリーン気筒cyl_1の発生トルクと、リーン気筒cyl_1以外の他の気筒cyl_nの発生トルクとの差をなくすために、その原因であるリーン気筒cyl_1の燃料量を多くなるように補正する。このとき、リーン気筒cyl_1の空燃比がリッチにならないように、燃料量増量分に応じて、空気量も多くするものである。その結果、リーン気筒cyl_1とリーン気筒cyl_1以外の他の気筒cyl_nとの気筒の間に空燃比およびトルクのばらつきがなくなる。 That is, in the fifth aspect or the seventh aspect, in order to eliminate the difference between the generated torque of the lean cylinder cyl_1 determined to have a small amount of fuel and the generated torque of other cylinders cyl_n other than the lean cylinder cyl_1, The fuel quantity of a certain lean cylinder cyl_1 is corrected so as to increase. At this time, the air amount is also increased in accordance with the fuel amount increase so that the air-fuel ratio of the lean cylinder cyl_1 does not become rich. As a result, there are no air-fuel ratio and torque variations between the cylinders of the lean cylinder cyl_1 and the cylinders cyl_n other than the lean cylinder cyl_1.
本発明に係るエンジンの制御装置の第11態様では、前記第5態様または第7態様の構成に加えて、前記燃料量が少ないと判断した気筒cyl_1の点火時期を進角側に補正する手段を備える(図11を参照)。 In an eleventh aspect of the engine control apparatus according to the present invention, in addition to the configuration of the fifth aspect or the seventh aspect, means for correcting the ignition timing of the cylinder cyl_1 determined to be small in the fuel amount to an advance side. Provide (see FIG. 11).
すなわち、第5態様もしくは第7態様において、燃料量が少ないと判定されたリーン気筒cyl_1の発生トルクと、リーン気筒cyl_1以外の他の気筒cyl_nの発生トルクとの差をなくすために、リーン気筒cyl_1の点火時期を進角側に補正する。その結果、リーン気筒cyl_1とリーン気筒cyl_1以外の他の気筒cyl_nとの間に空燃比およびトルクのばらつきがなくなる。 That is, in the fifth aspect or the seventh aspect, in order to eliminate the difference between the generated torque of the lean cylinder cyl_1 determined to have a small fuel amount and the generated torque of other cylinders cyl_n other than the lean cylinder cyl_1, the lean cylinder cyl_1 The ignition timing is corrected to the advance side. As a result, variations in the air-fuel ratio and torque are eliminated between the lean cylinder cyl_1 and the cylinders cyl_n other than the lean cylinder cyl_1.
本発明に係るエンジンの制御装置の第12態様では、前記構成に加えて、各気筒の角加速度の平均値を演算する手段と、前記角加速度のばらつきがもっとも大きい気筒の角加速度平均値と前記角加速度のばらつきがもっとも大きい気筒以外の気筒の平均値とを比較して、前記角加速度のばらつきがもっとも大きい気筒の角加速度平均値が他の気筒の平均値と比較してもっとも小さいときは、前記角加速度のばらつきがもっとも大きい気筒の燃料量を増量補正する手段とを備える(図12を参照)。 In a twelfth aspect of the engine control apparatus according to the present invention, in addition to the above configuration, the means for calculating the average value of the angular acceleration of each cylinder, the average angular acceleration value of the cylinder having the largest variation in angular acceleration, When comparing the average value of cylinders other than the cylinder with the largest variation in angular acceleration and the average angular acceleration value of the cylinder with the largest variation in angular acceleration being the smallest compared with the average value of other cylinders, Means for increasing the fuel amount of the cylinder having the largest variation in angular acceleration (see FIG. 12).
すなわち、前述したように、角加速度のばらつきが大きい気筒をリーン気筒と判断する。このとき、同時に、気筒毎の角加速度の平均値を演算する。予期せぬ燃料量減量によりリーン化しているのであれば、当該気筒のトルクは小さくなるので、当該気筒の角加速度平均値は他の気筒の角加速度平均値と比較して小さくなる。 That is, as described above, a cylinder having a large variation in angular acceleration is determined as a lean cylinder. At the same time, the average value of angular acceleration for each cylinder is calculated. If the engine is leaned due to an unexpected reduction in the fuel amount, the torque of the cylinder is small, and the average angular acceleration value of the cylinder is smaller than the average angular acceleration values of the other cylinders.
一方、予期せぬ空気量増量によりリーン化しているものであれば、当該気筒のトルクは(燃料量は減っていないので)、ほとんど小さくならなので、当該気筒の角加速度平均値も他の気筒の角加速度平均値と比較して、ほとんど小さくならない。 On the other hand, if the engine is leaning due to an unexpected increase in air volume, the torque of the cylinder will be small (because the fuel quantity has not decreased), so the average angular acceleration of the cylinder will be Compared to the average value of angular acceleration, it is hardly reduced.
したがって、角加速度のばらつきがもっとも大きい気筒の角加速度平均値が他の気筒の平均値と比較して、もっとも小さいとき、当該気筒の燃料量を増量することで、当該気筒の空燃比リーン化およびトルク減少化の双方を解決することができる。 Therefore, when the average angular acceleration value of the cylinder with the largest variation in angular acceleration is the smallest compared to the average value of the other cylinders, the amount of fuel in the cylinder is increased, so that the air-fuel ratio of the cylinder is made lean and Both torque reductions can be solved.
本発明に係るエンジンの制御装置の第13態様では、第1態様〜第3態様、第8態様〜第11態様の構成に加えて、前記角加速度のばらつきが大きい気筒cyl_1の角加速度もしくはその平均値と前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値の差が小さくなるように、空気量、燃料量、点火時期の補正を実施する手段を備える(図13を参照)。 In a thirteenth aspect of the engine control apparatus according to the present invention, in addition to the configurations of the first aspect to the third aspect and the eighth aspect to the eleventh aspect, the angular acceleration of the cylinder cyl_1 having a large variation in angular acceleration or an average thereof Means for correcting the air amount, the fuel amount, and the ignition timing so that the difference between the angular accelerations of the cylinders cyl_n other than the cylinder cyl_1 having the largest variation in the value and the angular acceleration or the average value thereof is reduced (FIG. 13). See).
すなわち、第1態様〜第3態様、第8態様〜第11態様において、前記角加速度のばらつきが大きい気筒cyl_1の発生トルクと前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの発生トルクとの差を、前記角加速度のばらつきが大きい気筒cyl_1の角加速度もしくはその平均値と前記角加速度のばらつきがもっとも大きい気筒cyl_1以外の気筒cyl_nの角加速度もしくはその平均値との差で検出し、当該差が小さくなるように(差が所定値以下となるまで)、空気量、燃料量、点火時期の補正を実施するものである。 That is, in the first aspect to the third aspect and the eighth aspect to the eleventh aspect, the generated torque of the cylinder cyl_1 with the large variation in angular acceleration and the generated torque of the cylinders cyl_n other than the cylinder cyl_1 with the largest variation in angular acceleration The difference between the angular acceleration of the cylinder cyl_1 having a large variation in angular acceleration or the average value thereof and the angular acceleration of the cylinder cyl_n other than the cylinder cyl_1 having the largest variation in angular acceleration or the average value thereof is detected. The air amount, the fuel amount, and the ignition timing are corrected so that the difference becomes small (until the difference becomes equal to or less than a predetermined value).
本発明によれば、燃料量と空気量が独立に制御される機構において、燃料系と空気系の誤差のそれぞれに応じて、適切に補正を実施し、空燃比ばらつきとトルクばらつきの双方を補正するので、実用環境においても、エンジンを安定して動作させることができ、もって、安定した排気性能、燃費性能(CO2性能)を実現することができる。 According to the present invention, in a mechanism in which the fuel amount and the air amount are independently controlled, correction is appropriately performed according to each of the fuel system and air system errors, and both the air-fuel ratio variation and the torque variation are corrected. Therefore, even in a practical environment, the engine can be operated stably, so that stable exhaust performance and fuel consumption performance (CO 2 performance) can be realized.
以下、本発明の実施の形態について図面を参照しながら説明する。
図14は、本発明に係るエンジンの制御装置の一実施形態(実施例1〜8で共通)を、それが適用された車載用エンジンの一例と共に示す概略構成図である。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
FIG. 14 is a schematic configuration diagram showing an embodiment (common to Examples 1 to 8) of an engine control apparatus according to the present invention, together with an example of an in-vehicle engine to which the engine control device is applied.
エンジン40は、複数の気筒9(ここでは4気筒)で構成される筒内噴射エンジンであり、外部からの空気は、エアクリーナ1を通過し、吸気通路4、コレクタ5を経て、吸気通路4の下流部分を構成する分岐通路に分配されて、各気筒9の燃焼室9a内に流入する。
The
吸気通路4の下流端部分の吸気ポート4aには、吸気通路4と燃焼室9aとの間を開閉するための吸気動弁30が配設されている。流入空気量は、エアフロセンサ2で検出され、電子スロットル3と吸気動弁30により調節される。
An
吸気動弁30は、図示していない動弁機構を備えており、エンジンコントロールユニット16の吸気弁駆動回路32からの駆動信号に基づいて駆動され、リフト量および開閉時期を調整可能な構成を有している。そして、各気筒に吸入される空気量を、気筒別に調整することができる。
The
クランク角センサ15では、クランク軸42の回転角10°(deg)毎の信号と燃焼周期毎の信号が出力される。吸気温センサ29では、吸気温を検出し、水温センサ14では、エンジンの冷却水温度を検出し、アクセル開度センサ13では、アクセルペダル6の踏み込み量を検出し、それによって運転者の要求トルクを検出する。
The
アクセル開度センサ13、エアフロセンサ2、吸気温センサ29、電子スロットル3に取り付けられたスロットル開度センサ17、クランク角センサ15、水温センサ14のそれぞれの信号は、本実施形態におけるエンジン40の制御装置であるエンジンコントロールユニット(ECU)16に送られ、これら各センサ出力からエンジン40の運転状態を得て、空気量、燃料噴射量、点火時期のエンジン40の主要な操作量が最適に演算される。
The signals of the
エンジンコントロールユニット16内で演算された目標空気量は、目標スロットル開度から電子スロットル駆動信号に変換され、電子スロットル3に送られる。燃料噴射量は開弁パルス信号に変換され、燃料噴射弁(インジェクタ)7に送られる。燃料噴射弁7は、各気筒9にそれぞれ設けられており、開弁パルス信号に基づいて、燃焼室9a内に燃料を噴射する。
The target air amount calculated in the
また、エンジンコントロールユニット16で演算された点火時期で点火されるよう駆動信号が点火プラグ8に送られる。点火プラグ8は、各気筒9の燃焼室9a内に点火部が臨むように各々取り付けられている。
Further, a drive signal is sent to the
燃料噴射弁7から噴射された燃料は、吸気通路4からの空気と混合されて、燃焼室9a内にて混合気を形成する。混合気は、所定の点火時期で点火プラグ8から発生される火花により爆発し、その燃焼圧により気筒9内のピストン41を押し下げてエンジン40の動力となる。
The fuel injected from the
各気筒9の排気は、燃焼室9aから排気弁が配設された排気ポートを介して排気通路10の上流部分を形成する個別通路部に排出され、その個別通路部から排気管集合部10Aを通って排気通路10の下流部分に備えられた三元触媒11に流入し、三元触媒11で浄化された後、外部に排出される。三元触媒11は、排気ガスに含まれている炭化水素HC及び一酸化炭素COを酸化させ、窒素酸化物NOxを還元して浄化させる。
Exhaust gas from each
排気通路10における三元触媒11よりも下流側には、触媒下流O2センサ20が設けられており、排気通路10における触媒11よりも上流側の排気管集合部10Aには、排気空燃比を検出する排気センサとして触媒上流A/Fセンサ12が設けられている。
A catalyst downstream O 2 sensor 20 is provided downstream of the three-
触媒上流A/Fセンサ12は、排気中に含まれる酸素濃度に対して線形の出力特性を持っている。排気中の酸素濃度と空燃比との関係は、ほぼ線形になっており、したがって、酸素濃度を検出する触媒上流A/Fセンサ12によって排気空燃比を求めることが可能となる。
The catalyst upstream A /
そして、エンジンコントロールユニット16では、触媒上流A/Fセンサ12の出力信号から三元触媒11上流の排気空燃比を求め、触媒下流O2センサ20の出力信号に基づいて三元触媒11下流の酸素濃度もしくはストイキに対してリッチもしくはリーンであるかを求める。
Then, the
また、触媒上流A/Fセンサ12、触媒下流O2センサ20の出力を用いて三元触媒11の浄化効率が最適となるよう燃料噴射量(噴射燃料量)もしくは空気量を逐次補正するF/B制御を行っている。
Also, the fuel injection amount (injected fuel amount) or the air amount is sequentially corrected so that the purification efficiency of the three-
また、燃焼室9aから排気通路10に排出された排気ガスの一部は、必要に応じて排気還流管18を通って吸気通路4側に還流される。この還流量は、排気還流管18に設けられたEGRバルブ19によって制御される。
Further, part of the exhaust gas discharged from the
図15は、エンジンコントロールユニット16の内部構成図である。ECU16内には、エアフロセンサ2、触媒上流A/Fセンサ12、アクセル開度センサ13、水温センサ14、エンジン回転数センサ15、スロットル弁開度センサ17、触媒下流O2センサ20、吸気温センサ29、車速センサ31の各センサ出力値が入力され、入力回路24にてノイズ除去等の信号処理が行われた後、入出力ポート25に送られる。
FIG. 15 is an internal configuration diagram of the
入力ポートの値は、RAM23に保管され、CPU21内で演算処理される。演算処理の内容を記述した制御プログラムは、ROM22に予め書き込まれており、前記制御プログラムに従って演算された各アクチュエータ作動量を表す値は、RAM23に保管された後、入出力ポート25に送られる。
The value of the input port is stored in the
そして、火花点火燃焼時に用いられる点火プラグ8の作動信号は、点火信号出力回路26内の一次側コイルの通流時はONとなり、非通流時にはOFFとなるON・OFF信号がセットされる。点火時期はONからOFFになる時であり、出力ポートにセットされた点火プラグ用の信号が、点火信号出力回路26で燃焼に必要な十分なエネルギーに増幅されて点火プラグ8に供給される。
The operation signal of the
また、燃料噴射弁7の駆動信号は、開弁時にはON、閉弁時にはOFFとなるON・OFF信号がセットされ、燃料噴射弁駆動回路27にて燃料噴射弁7を開くに十分なエネルギーに増幅されて燃料噴射弁7に出力される。さらに、電子スロットル3の目標開度を実現する駆動信号は、電子スロットル駆動回路28を経て電子スロットル3に出力される。そして、吸気動弁30の目標リフト量、目標開閉時期を実現する駆動信号は、吸気動弁駆動回路32を経て、吸気動弁30に出力される。
The drive signal for the
次に、エンジンコントロールユニット16が実行する制御の実施例について具体的に説明する。
[実施例1:図16〜図22]
図16は、実施例1(実施例5)の制御装置1Aを示す制御システム図である。制御装置1Aのエンジンコントロールユニット16は、機能ブロック図で示されているように、基本燃料噴射量演算部161、空燃比フィードバック補正値演算部162、検出許可および制御ステージ演算部163、気筒別角加速度特性演算部164、気筒別燃料噴射量補正値演算部165、気筒別空気量補正値演算部166を備えている。これらの各演算部は、エンジンコントロールユニット16にて制御プログラムを実行することによって実現される。
Next, a specific example of the control executed by the
[Example 1: Figs. 16 to 22]
FIG. 16 is a control system diagram illustrating the
基本燃料噴射量演算部161では、吸入空気量Qaとエンジン回転速度Neに基づいて、基本燃料噴射量Tp0を演算する。空燃比フィードバック補正値演算部162では、触媒上流A/Fセンサ12の出力(Rabf)に基づいて、排気管集合部空燃比(Rabf)が目標空燃比に収束するように、全気筒の燃料噴射量を等価に補正する補正値(Alpha)を演算し、また、目標空燃比と排気管集合部空燃比との誤差(e_Rabf)を演算する。
The basic fuel injection
検出許可および制御ステージ演算部163では、気筒別の燃料噴射量補正、空気量補正を実施するための、気筒別の角加速度特性の検出許可フラグ(fp_kensyutsu)および制御ステージフラグ(f_stage)を演算する。制御ステージは、ステージ1およびステージ2の2つのステージからなる(詳細後述)。
The detection permission and control
気筒別角加速度特性演算部164では、検出許可および制御ステージ演算部163から検出許可が出ると(fp_kensyutsu=1)、各ステージに応じて、気筒別角加速度特性である異常気筒の気筒番号(Cyl_Mal)、異常気筒の角加速度の分散値(V_omega_Cyl_Mal)、異常気筒の角加速度の平均値(M_omega_Cyl_Mal)を演算する。そして、上記の気筒別角加速度特性の演算が完了した後、燃料量、空気量の補正を許可するフラグ(fp_hosei)を演算する。
When detection permission and control
気筒別燃料噴射量補正値演算部165では、前述の検出許可および制御ステージ演算部163により求めた制御ステージフラグ(f_stage)と、気筒別角加速度特性演算部164により求めた補正許可フラグ(fp_hosei)と、異常気筒の気筒番号(Cyl_Mal)と、異常気筒の角加速度の分散値(V_omega_Cyl_Mal)と、異常気筒の角加速度の平均値(M_omega_Cyl_Mal)に基づいて、気筒別の燃料噴射量補正値(F_Hos_n(nは気筒番号))を演算する。
In the cylinder specific fuel injection amount correction
そして、気筒別空気量補正値演算部166では、前述の検出許可および制御ステージ演算部163により求めた制御ステージフラグ(f_stage)と、気筒別角加速度特性演算部164により求めた補正許可フラグ(fp_hosei)と、異常気筒の気筒番号(Cyl_Mal)と、異常気筒の角加速度の平均値(M_omega_Cyl_Mal)に基づいて、気筒別の空気量補正値(IVO_Hos_n, IVC_Hos_n)を演算する。
The cylinder air amount correction
ここに、IVO_Hos_nは、n番気筒の吸気弁開時期(IVO_n)に対して施される補正値であり、IVC_Hos_nは、n番気筒の吸気弁閉時期(IVC_n)に対して施される補正値である。IVO_n,IVC_nの演算方法については、従来より様々な方法があり、本発明とは直接関係しないので、ここでは詳述しない。 Here, IVO_Hos_n is a correction value applied to the intake valve opening timing (IVO_n) of the nth cylinder, and IVC_Hos_n is a correction value applied to the intake valve closing timing (IVC_n) of the nth cylinder. It is. There are various conventional methods for calculating IVO_n and IVC_n, which are not directly related to the present invention and will not be described in detail here.
実施例1では、下記プロセスの制御を実施する。
・ステージ1(f_stage=1のとき)
(1)気筒別に角加速度の分散値を演算し、もっとも角加速度の分散値が大きい気筒(もっともリーンな気筒:リーン気筒)を異常気筒として検出する(Cyl_Mal)。気筒番号(Cyl_Mal)、すなわち異常気筒の角加速度の分散値をV_omega_Cyl_Malとする。
(2)V_omega_Cyl_Malに基づいて、異常気筒に対して、燃料噴射量を増量補正する(F_Hos_n)。
In the first embodiment, the following processes are controlled.
・ Stage 1 (when f_stage = 1)
(1) The angular acceleration dispersion value is calculated for each cylinder, and the cylinder having the largest angular acceleration dispersion value (the leanest cylinder: the lean cylinder) is detected as an abnormal cylinder (Cyl_Mal). The cylinder number (Cyl_Mal), that is, the dispersion value of the angular acceleration of the abnormal cylinder is defined as V_omega_Cyl_Mal.
(2) On the basis of V_omega_Cyl_Mal, the fuel injection amount is increased and corrected for the abnormal cylinder (F_Hos_n).
・ステージ2(f_stage=2のとき)
(1)ステージ1の終了後に実施。
(2)気筒別に角加速度の平均値を演算し、もっとも角加速度の平均値が大きい気筒番号が異常気筒の気筒番号(Cyl_Mal)と一致したとき、異常気筒の角加速度の平均値をM_omega_Cyl_Malとする。
(3)M_omega_Cyl_Malに基づいて、異常気筒の燃料噴射量および空気量を減量補正する(F_Hos_n, IVO_Hos_n, IVC_Hos_n)。
以下に、各演算部の詳細説明を行う。
・ Stage 2 (when f_stage = 2)
(1) Implemented after
(2) Calculate the average value of angular acceleration for each cylinder, and when the cylinder number with the largest average value of angular acceleration matches the cylinder number (Cyl_Mal) of the abnormal cylinder, the average value of the angular acceleration of the abnormal cylinder is M_omega_Cyl_Mal .
(3) Based on M_omega_Cyl_Mal, the fuel injection amount and the air amount of the abnormal cylinder are reduced and corrected (F_Hos_n, IVO_Hos_n, IVC_Hos_n).
Hereinafter, detailed description of each calculation unit will be given.
<基本燃料噴射量演算部(図17)>
図17は、基本燃料噴射量演算部の機能を示すブロック線図である。
<Basic fuel injection amount calculation unit (FIG. 17)>
FIG. 17 is a block diagram showing the function of the basic fuel injection amount calculation unit.
図16に示す基本燃料噴射量演算部161では、吸入空気量Qaとエンジン回転速度Neに基づいて、基本燃料噴射量(Tp0)を演算する。具体的には、下記に示される式(1)で演算する。
Tp0=K0×Qa/(Ne×Cyl) ・・・(1)
A basic fuel injection
Tp0 = K0 × Qa / (Ne × Cyl) (1)
ここに、Cylは気筒数を表す。K0は、インジェクタの仕様(燃料噴射パルス幅と燃料噴射量の関係)に基づき決める。 Here, Cyl represents the number of cylinders. K0 is determined based on injector specifications (relationship between fuel injection pulse width and fuel injection amount).
<空燃比フィードバック補正値演算部(図18)>
図18は、空燃比フィードバック補正値演算部の機能を示すブロック線図である。
図16に示す空燃比フィードバック補正値演算部162では、空燃比センサ12の出力(Rabf)に基づいた燃料噴射量補正値を演算する。具体的には、図18に示されるように、目標排気管集合部空燃比(TgRabf)と排気管集合部空燃比(Rabf)との差である空燃比フィードバック制御誤差(e_Rabf)に基づいて、PI制御により、空燃比フィードバック補正値(Alpha)を演算する。なお、空燃比フィードバック補正値(Alpha)は、全気筒の燃料噴射量に等価に補正される。
<Air-fuel ratio feedback correction value calculation unit (FIG. 18)>
FIG. 18 is a block diagram showing the function of the air-fuel ratio feedback correction value calculation unit.
An air-fuel ratio feedback correction
<検出許可および制御ステージ演算部(図19)>
図19は、検出許可および制御ステージ演算部の機能を示すブロック線図である。
図16に示す検出許可および制御ステージ演算部163では、検出許可フラグ(fp_kensyutsu)および制御ステージ(f_stage)を演算する。具体的には、図19に示されるように、最新の基本燃料噴射量(Tp0)とその前回演算値との差(ΔTp0)を演算し、最新のエンジン回転速度(Ne)とその前回演算値との差(ΔNe)を演算する。
<Detection permission and control stage calculation unit (FIG. 19)>
FIG. 19 is a block diagram illustrating functions of the detection permission and control stage calculation unit.
The detection permission and control
そして、「ΔTp0が所定時間、所定範囲内にあり」かつ「ΔNeの所定時間、所定範囲にあり」かつ「空燃比フィードバック制御誤差e_Rabfが所定時間、所定範囲内にある」とき、後述の気筒別角加速度特性の検出を許可する(fp_kensyutsu=1)。 Then, when “ΔTp0 is within a predetermined range for a predetermined time” and “the predetermined time for ΔNe is within a predetermined range” and “the air-fuel ratio feedback control error e_Rabf is within a predetermined range for a predetermined time”, Allow detection of angular acceleration characteristics (fp_kensyutsu = 1).
また、制御ステージ変更フラグ(f_ch_stage)が、0→1になったとき、制御ステージフラグ(f_stage)の値を1→2→1→2→・・・と順に切り換える。なお、制御ステージフラグ(f_stage)の初期値は0とし、最初の切換は0→1とする。 When the control stage change flag (f_ch_stage) changes from 0 to 1, the value of the control stage flag (f_stage) is switched in order of 1 → 2 → 1 → 2 →. The initial value of the control stage flag (f_stage) is 0, and the first switching is 0 → 1.
<気筒別角加速度特性演算部(図20)>
図20は、気筒別角加速度特性演算部の機能を示すブロック線図である。
図16に示す気筒別角加速度特性演算部164では、各ステージに応じて、気筒別角加速度特性である異常気筒の気筒番号(Cyl_Mal)、異常気筒の角加速度の分散値(V_omega_Cyl_Mal)、異常気筒の角加速度の平均値( M_omega_Cyl_Mal)を演算する。具体的には、図20に示されるように、fp_kensyutsu(検出許可フラグ)=1のとき、下記の処理を実施する。
<Cylinder-specific angular acceleration characteristic calculation unit (FIG. 20)>
FIG. 20 is a block diagram showing the function of the cylinder specific angular acceleration characteristic calculation unit.
In the cylinder specific angular acceleration
・エンジン回転速度(Ne)から、気筒毎の角加速度(omega_n)を演算する。ここにnは、気筒番号を示す。燃焼周期毎にエンジン回転速度Neの平均値を求め、前回のエンジン回転速度Ne平均値との差を角加速度(omega_n)とする。 -Calculate the angular acceleration (omega_n) for each cylinder from the engine speed (Ne). Here, n indicates a cylinder number. An average value of the engine speed Ne is obtained for each combustion cycle, and a difference from the previous average value of the engine speed Ne is defined as an angular acceleration (omega_n).
・ステージ1のとき(f_stage=1のとき)
(1)omega_nから、所定サイクル間における気筒毎のomega_nの分散値(V_omega_n)を求める。
(2)そして、V_omega_nがもっとも大きい気筒の気筒番号をCyl_Mal(異常気筒番号)とし、気筒番号がCyl_MalのV_omega_nをV_omega_Cyl_Mal(異常気筒の角加速度の分散値)とする。
(3)fp_kensyutsu=0→1となって、最初のCyl_MalおよびV_omwga_Cyl_Malが求まったとき、fp_hosei=1とする。
(4)V_omega_Cyl_Malがその他の気筒のV_omega_n以下となったら、fp_hosei=0、f_ch_stageを1回だけ1とする。
・ Stage 1 (when f_stage = 1)
(1) From omega_n, the dispersion value (V_omega_n) of omega_n for each cylinder during a predetermined cycle is obtained.
(2) The cylinder number of the cylinder with the largest V_omega_n is Cyl_Mal (abnormal cylinder number), and V_omega_n with the cylinder number Cyl_Mal is V_omega_Cyl_Mal (dispersion value of angular acceleration of the abnormal cylinder).
(3) When fp_kensyutsu = 0 → 1 and the first Cyl_Mal and V_omwga_Cyl_Mal are obtained, fp_hosei = 1.
(4) When V_omega_Cyl_Mal becomes equal to or less than V_omega_n of other cylinders, fp_hosei = 0 and f_ch_stage are set to 1 only once.
・ステージ2のとき(f_stage=2のとき)
(1)omega_nから、所定サイクル間における気筒毎のomega_nの平均値(M_omega_n)を求める。
(2)M_omega_nがもっとも大きい気筒の気筒番号が、Cyl_Mal(異常気筒番号)のとき、気筒番号がCyl_MalのM_omega_nをM_omega_Cyl_Mal(異常気筒の角加速度の平均値)とする。
(3)fp_kensyutsu=0→1となって、最初のCyl_MalおよびM_omwga_Cyl_Malが求まったとき、fp_hosei(補正許可フラグ)=1とする。
(4)M_omega_Cyl_Malがその他の気筒のM_omega_n以下となったら、fp_hosei=0、f_ch_stageを1回だけ1とする。
(5)fp_kensyutsu=0のとき、fp_hosei=0とする。
・ When stage 2 (when f_stage = 2)
(1) An average value (M_omega_n) of omega_n for each cylinder during a predetermined cycle is obtained from omega_n.
(2) When the cylinder number of the cylinder with the largest M_omega_n is Cyl_Mal (abnormal cylinder number), M_omega_n with the cylinder number Cyl_Mal is defined as M_omega_Cyl_Mal (average value of angular acceleration of the abnormal cylinder).
(3) When fp_kensyutsu = 0 → 1 and the first Cyl_Mal and M_omwga_Cyl_Mal are obtained, fp_hosei (correction permission flag) = 1.
(4) When M_omega_Cyl_Mal becomes equal to or less than M_omega_n of other cylinders, fp_hosei = 0 and f_ch_stage are set to 1 only once.
(5) When fp_kensyutsu = 0, fp_hosei = 0.
<気筒別燃料噴射量補正値演算部(図21)>
図21は、気筒別燃料噴射量補正値演算部の機能を示すブロック線図である。
図16に示す気筒別燃料噴射量補正値演算部165では、前述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の燃料噴射量補正値(F_Hos_n(nは気筒番号))を演算する。具体的には、図21に示されるように、fp_hosei=1のとき、下記の処理を実施する。
・気筒番号が、Cyl_Mal(異常気筒番号)の燃料噴射量補正値のみ、本演算部で演算される値とする。それ以外の気筒のF_Hos_n(気筒別燃料噴射量補正値)は、1.0とする。
・ステージ1のとき(f_stage=1)
(1)V_omega_Cyl_Malからテーブル(Tbl_V_omega_F_Hos)221を参照して、補正対象気筒(気筒番号がCyl_Mal)のF_Hos_n(気筒別燃料噴射量補正値)とする。
・ステージ2のとき(f_stage=2のとき)>
(1)M_omega_Cyl_Malからテーブル(Tbl_M_omega_F_Hos)222を参照して、補正対象気筒(気筒番号がCyl_Mal)のF_Hos_n(気筒別燃料噴射量補正値)とする。
<Cylinder-specific fuel injection amount correction value calculation unit (FIG. 21)>
FIG. 21 is a block diagram showing the function of the cylinder specific fuel injection amount correction value calculation unit.
In the cylinder specific fuel injection amount correction
Only the fuel injection amount correction value with the cylinder number Cyl_Mal (abnormal cylinder number) is the value calculated by this calculation unit. F_Hos_n (cylinder fuel injection amount correction value) for other cylinders is set to 1.0.
・ In stage 1 (f_stage = 1)
(1) With reference to the table (Tbl_V_omega_F_Hos) 221 from V_omega_Cyl_Mal, F_Hos_n (cylinder-specific fuel injection amount correction value) of the correction target cylinder (cylinder number is Cyl_Mal) is set.
・ When stage 2 (when f_stage = 2)>
(1) With reference to the table (Tbl_M_omega_F_Hos) 222 from M_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set as F_Hos_n (fuel injection amount correction value for each cylinder).
Tbl_V_omega_F_Hosの設定値は、角加速度の分散値と空燃比の関係を表すもので、実機試験の結果から決めるのが良い。Tbl_M_omega_F_Hosの設定値は、角加速度の平均値とトルク(充填効率相当燃料噴射量)の関係を表すもので、実機試験の結果から決めるのが良い。すなわち、気筒番号Cyl_Malの気筒の角加速度平均値がその他の気筒の角加速度平均値よりも大きいとき、気筒別燃料噴射量補正値演算部165による補正を実施する。
The set value of Tbl_V_omega_F_Hos represents the relationship between the dispersion value of angular acceleration and the air-fuel ratio, and should be determined from the results of actual machine tests. The set value of Tbl_M_omega_F_Hos represents the relationship between the average value of angular acceleration and torque (fuel injection amount corresponding to charging efficiency), and should be determined from the results of actual machine tests. That is, when the average angular acceleration value of the cylinder with the cylinder number Cyl_Mal is larger than the average angular acceleration values of the other cylinders, correction by the cylinder specific fuel injection amount correction
角加速度の大きさは、当該気筒(異常気筒)のトルクの大きさと相関があるので、気筒番号Cyl_Malの気筒(異常気筒)のトルクが、その他の気筒と同じになるように当該気筒(異常気筒)の燃料量を少なくするものである。なお、燃料量のみ少なくすると、当該気筒(異常気筒)はリーンになるので、後述の気筒別空気量補正値演算部166で、当該気筒(異常気筒)の空気量(充填効率)も併せて少なくする。
Since the magnitude of the angular acceleration has a correlation with the magnitude of the torque of the cylinder (abnormal cylinder), the cylinder (abnormal cylinder) of the cylinder (abnormal cylinder) having the cylinder number Cyl_Mal has the same torque as the other cylinders. ) To reduce the amount of fuel. Note that if only the fuel amount is reduced, the cylinder (abnormal cylinder) becomes lean, and therefore the air amount (filling efficiency) of the cylinder (abnormal cylinder) is also reduced by the cylinder-specific air amount correction
<気筒別空気量補正値演算部(図22)>
図22は、気筒別空気量補正値演算部の機能を示すブロック線図である。
図16に示す気筒別空気量補正値演算部166では、前述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の空気量補正値(IVO_Hos_n, IVC_Hos(nは気筒番号))を演算する。具体的には、図22に示されるように、f_stage=2かつfp_hosei=1のとき、下記の処理を実施する。
(1)気筒番号が、Cyl_Mal(異常気筒番号)の空気量補正値のみ、本演算部で演算される値とする。それ以外の気筒のIVO_Hos_nおよびIVC_Hos_nは、0とする。
(2)M_omega_Cyl_Malからテーブル(Tbl_M_omega_IVO)231を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVO_Hos_nとする。
(3)M_omega_Cyl_Malからテーブル(Tbl_M_omega_IVC)232を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVC_Hos_nとする。
<Cylinder-specific air amount correction value calculation unit (FIG. 22)>
FIG. 22 is a block diagram showing functions of the cylinder specific air amount correction value calculation unit.
In the cylinder-specific air amount correction
(1) Only an air amount correction value with a cylinder number of Cyl_Mal (abnormal cylinder number) is set as a value calculated by this calculation unit. IVO_Hos_n and IVC_Hos_n of other cylinders are set to 0.
(2) With reference to the table (Tbl_M_omega_IVO) 231 from M_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to IVO_Hos_n.
(3) With reference to the table (Tbl_M_omega_IVC) 232 from M_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set as IVC_Hos_n.
Tbl_M_omega_IVO_HosおよびTbl_M_omega_IVC_Hosの設定値は、角加速度の平均値とトルク(充填効率)の関係を表すもので、実機試験の結果から決めるのが良い。すなわち、気筒番号Cyl_Malの気筒の角加速度平均値がその他の気筒の角加速度平均値よりも大きいとき、気筒別空気量補正値演算部166による補正を実施する。
The set values of Tbl_M_omega_IVO_Hos and Tbl_M_omega_IVC_Hos represent the relationship between the average value of angular acceleration and torque (filling efficiency) and should be determined from the results of actual machine tests. That is, when the average angular acceleration value of the cylinder having the cylinder number Cyl_Mal is larger than the average angular acceleration values of the other cylinders, correction by the cylinder air amount correction
角加速度の大きさは、当該気筒(異常気筒)のトルクの大きさと相関があるので、気筒番号Cyl_Malの気筒(異常気筒)のトルクが、その他の気筒(異常気筒以外の他の気筒)と同じになるように当該気筒(異常気筒)の空気量(充填効率)を少なくするものである。なお、空気量のみ少なくすると、当該気筒(異常気筒)はリッチになるので、前述の気筒別燃料量補正値演算部165で、当該気筒(異常気筒)の燃料量も併せて少なくする。
Since the magnitude of the angular acceleration has a correlation with the magnitude of the torque of the cylinder (abnormal cylinder), the torque of the cylinder (Cyl_Mal) with the cylinder number Cyl_Mal is the same as other cylinders (other cylinders other than the abnormal cylinder). Thus, the air amount (filling efficiency) of the cylinder (abnormal cylinder) is reduced. If only the air amount is reduced, the cylinder (abnormal cylinder) becomes rich. Therefore, the fuel amount correction
実施例1の制御装置1Aによれば、排気管集合部の空燃比に基づいた空燃比フィードバック制御を実施中に、目標空燃比と実空燃比との差が所定値以下であることを判定する。そして、目標空燃比と実空燃比との差が所定値以下であると判定された場合に、実空燃比が目標空燃比近傍に収束していると判断し、筒内圧と相関のある角加速度のばらつき(分散値、平均値)を気筒別に検出する。
According to the
そして、複数の気筒のうち、角加速度のばらつきがもっとも大きい気筒を異常気筒(リーン気筒)として特定し、その異常気筒の燃料噴射量を増量補正して、異常気筒の空燃比をリッチ側に補正する。 Then, among the plurality of cylinders, the cylinder having the largest variation in angular acceleration is identified as an abnormal cylinder (lean cylinder), and the fuel injection amount of the abnormal cylinder is increased and corrected, and the air-fuel ratio of the abnormal cylinder is corrected to the rich side. To do.
このとき、排気管集合部の空燃比(全気筒の平均空燃比)は、異常気筒の空燃比をリッチ側に補正した影響で、一時的にリッチ側にずれるが、その分、全気筒一律にリーン側に補正するように、空燃比フィードバック制御が機能するので、その結果、全ての気筒の空燃比が目標空燃比近傍に制御されることになる。 At this time, the air-fuel ratio (average air-fuel ratio of all cylinders) of the exhaust pipe collecting portion temporarily shifts to the rich side due to the effect of correcting the air-fuel ratio of the abnormal cylinder to the rich side. Since the air-fuel ratio feedback control functions so as to correct to the lean side, as a result, the air-fuel ratios of all the cylinders are controlled in the vicinity of the target air-fuel ratio.
複数の気筒のうち、特定気筒に着目した場合、空燃比のずれは、必ずしも、リーン側にずれるものではないが、リッチ側にずれた場合も、空燃比フィードバック制御により、その他の気筒がリーン側にずれるので、いずれにしても異常気筒は発生する。さらに、本制御を頻繁に実施することで、もっともリーンになった気筒のみを異常気筒として逐次補正できるので、その結果、常時、全気筒の空燃比のばらつきを抑制することができる。 When focusing on a specific cylinder among the plurality of cylinders, the air-fuel ratio shift does not necessarily shift to the lean side. However, even if the air-fuel ratio shifts to the rich side, the other cylinders are moved to the lean side by air-fuel ratio feedback control. In any case, an abnormal cylinder is generated anyway. Further, by frequently performing this control, only the leanest cylinder can be sequentially corrected as an abnormal cylinder, and as a result, variations in the air-fuel ratio of all cylinders can be constantly suppressed.
そして、異常気筒の空燃比を燃料量増量補正によりリッチ側に補正した後、燃料量増量補正した異常気筒の角加速度もしくはその平均値と、異常気筒以外の他の気筒の角加速度もしくはその平均値とを比較し、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より大きいときは、異常気筒の空気量が、異常気筒以外の他の気筒の空気量より多いと判断する。 Then, after correcting the air-fuel ratio of the abnormal cylinder to the rich side by the fuel amount increase correction, the angular acceleration of the abnormal cylinder corrected by the fuel amount increase or the average value thereof, and the angular acceleration of other cylinders other than the abnormal cylinder or the average value thereof If the angular acceleration of the abnormal cylinder or its average value is greater than the angular acceleration of other cylinders other than the abnormal cylinder or its average value, the amount of air in the abnormal cylinder is Judged to be more than the amount.
異常気筒のリーン化の原因が意図せぬ空気量増量であった場合、燃料量増量補正により、異常気筒の空燃比は適正化(目標空燃比近傍に収束)されるものの、異常気筒以外の他の気筒と比較して、供給燃料量が多くなるため、発生トルクは大きくなる。すなわち、異常気筒の燃焼時に発生するクランク軸の角加速度は、異常気筒以外の他の気筒の燃焼時に発生する角加速度と比較して大きくなる。 If the cause of leaning of the abnormal cylinder is an unintended increase in air amount, the air-fuel ratio of the abnormal cylinder is optimized (convergence converged in the vicinity of the target air-fuel ratio) by correcting the increase in fuel amount. Since the amount of supplied fuel is larger than that of the cylinder, the generated torque is increased. That is, the angular acceleration of the crankshaft that occurs during combustion of the abnormal cylinder is greater than the angular acceleration that occurs during combustion of cylinders other than the abnormal cylinder.
したがって、異常気筒の角加速度の平均値が、異常気筒以外の他の気筒の角加速度の平均値よりも大きいときは、異常気筒の空気量が、異常気筒以外の他の気筒の空気量よりも多かったと判断することができる。 Therefore, when the average value of the angular acceleration of the abnormal cylinder is larger than the average value of the angular acceleration of the cylinders other than the abnormal cylinder, the air amount of the abnormal cylinder is larger than the air amount of the other cylinders other than the abnormal cylinder. It can be judged that there were many.
そして、空気量が多いと判断された異常気筒の空気量および燃料量を少なくなるように補正する。すなわち、空気量が多いと判定された異常気筒の発生トルクと、異常気筒以外の他の気筒の発生トルクとの差をなくすために、その原因である異常気筒の空気量を少なくなるように補正する。 And it correct | amends so that the air quantity and fuel quantity of an abnormal cylinder judged that there are many air quantities may decrease. In other words, in order to eliminate the difference between the generated torque of the abnormal cylinder determined to have a large amount of air and the generated torque of other cylinders other than the abnormal cylinder, correction is performed so that the amount of air in the abnormal cylinder that is the cause is reduced. To do.
このとき、異常気筒の空燃比がリッチにならないように、空気量減量分に応じて、燃料量も少なく補正する。その結果、異常気筒と異常気筒以外の他の気筒との間における空燃比およびトルクのばらつきをなくすことができる。 At this time, the fuel amount is also corrected to be small in accordance with the air amount reduction amount so that the air-fuel ratio of the abnormal cylinder does not become rich. As a result, it is possible to eliminate variations in air-fuel ratio and torque between the abnormal cylinder and other cylinders other than the abnormal cylinder.
また、実施例1の制御装置1Aによれば、異常気筒を特定するとともに、気筒毎の角加速度の平均値を演算する。そして、異常気筒の角加速度平均値と異常気筒以外の他の気筒の角加速度平均値とを比較して、異常気筒の角加速度平均値がもっとも小さいときは、異常気筒の燃料量を増量補正する。
Further, according to the
異常気筒のリーン化の原因が予期せぬ燃料量減量であった場合、異常気筒のトルクは小さくなるので、異常気筒の角加速度平均値は、異常気筒以外の他の気筒の角加速度平均値と比較して小さくなる。 If the cause of leaning of the abnormal cylinder is an unexpected fuel reduction, the torque of the abnormal cylinder decreases, so the average angular acceleration value of the abnormal cylinder is the same as the average angular acceleration value of other cylinders other than the abnormal cylinder. It becomes small compared.
一方、異常気筒のリーン化の原因が予期せぬ空気量増量であった場合、燃料量は減っていないので、異常気筒のトルクはほとんど小さくならず、異常気筒の角加速度平均値も異常気筒以外の他の気筒の角加速度平均値と比較して、ほとんど小さくならない。 On the other hand, if the cause of leaning of the abnormal cylinder is an unexpected increase in air volume, the amount of fuel has not decreased, so the torque of the abnormal cylinder is hardly reduced, and the average angular acceleration value of the abnormal cylinder is also other than that of the abnormal cylinder. Compared with the average value of angular acceleration of other cylinders, it is hardly reduced.
したがって、異常気筒の角加速度平均値と異常気筒以外の他の気筒の平均値とを比較して、異常気筒の角加速度平均値がもっとも小さいときは、予期せぬ燃料量減量が生じていると判断することができ、異常気筒の燃料量を増量することで、異常気筒の空燃比リーン化およびトルク減少化の双方を解決することができる。 Therefore, comparing the average angular acceleration value of the abnormal cylinder with the average value of the cylinders other than the abnormal cylinder, and when the average angular acceleration value of the abnormal cylinder is the smallest, an unexpected fuel loss has occurred. It can be determined, and by increasing the amount of fuel in the abnormal cylinder, both the leaning of the air-fuel ratio and the torque reduction of the abnormal cylinder can be solved.
[実施例2:図23〜図25]
前述の実施例1では、異常気筒の燃料量を増量補正して異常気筒の空燃比をリッチ側に補正し、補正後の異常気筒のトルクが異常気筒以外の他の気筒のトルクよりも大きいときは、異常気筒の燃料量と空気量を減量補正する場合について説明したが、実施例2では、異常気筒の燃料量と空気量を減量補正する代わりに、異常気筒の点火時期をリタード補正するものである。すなわち、実施例2では、異常気筒の燃料量を増量補正して異常気筒の空燃比をリッチ側に補正し、補正後の異常気筒のトルクが異常気筒以外の他の気筒のトルクよりも大きいときは、異常気筒の点火時期をリタード補正することを特徴とする。
[Example 2: Figs. 23 to 25]
In the first embodiment described above, when the fuel amount of the abnormal cylinder is increased and corrected, the air-fuel ratio of the abnormal cylinder is corrected to the rich side, and the corrected torque of the abnormal cylinder is larger than the torque of other cylinders other than the abnormal cylinder In the second embodiment, the amount of fuel and air in the abnormal cylinder are corrected to be reduced. In the second embodiment, instead of correcting the amount of fuel and air in the abnormal cylinder to be decreased, the ignition timing of the abnormal cylinder is retarded. It is. That is, in the second embodiment, when the fuel amount of the abnormal cylinder is increased and corrected, the air-fuel ratio of the abnormal cylinder is corrected to the rich side, and the corrected torque of the abnormal cylinder is larger than the torque of other cylinders other than the abnormal cylinder. Is characterized in that the ignition timing of the abnormal cylinder is retarded.
図23は、実施例2の制御装置1Bを示す制御システム図である。
図示の制御装置1Bのエンジンコントロールユニット16は、実施例1に対して、気筒別燃料噴射量補正値演算部165の仕様が異なる。また、実施例1の気筒別空気量補正値演算部166に対応するものがなく、新たに気筒別点火時期補正値演算部241が用意される点が異なる。他の手段は、実施例1のものと略同様であるので、以下においては、実施例1と異なる部分について重点的に説明する。
FIG. 23 is a control system diagram illustrating the
The
気筒別点火時期補正値演算部241では、前述の気筒別角加速度特性演算部164で演算される角加速度特性に基づいて、気筒別の点火時期補正値(ADV_Hos_n)を演算する。ここに、ADV_Hos_nは、基本点火時期(ADV0)に対して施される補正値である。基本点火時期(ADV0)の演算方法については(各運転条件において燃費最適となるように設定される値であり)、従来より様々な方法があり、本発明とは直接関係しないので、ここでは詳述しない。
The cylinder specific ignition timing correction
なお、実施例2では、下記プロセスの制御を実施する。
・ステージ1のとき(f_stage=1のとき)
(1)気筒別に角加速度の分散値を演算し、もっとも角加速度の分散値が大きい気筒(もっともリーンな気筒:リーン気筒)を異常気筒として検出する(Cyl_Mal)。気筒番号Cyl_Malの気筒、すなわち異常気筒の角加速度の分散値をV_omega_Cyl_Malとする。
(2)V_omega_Cyl_Malに基づいて、異常気筒に対して、燃料噴射量を増量補正する(F_Hos_n)。
・ステージ2のとき(f_stage=2のとき)
(1)ステージ1の終了後に実施。
(2)気筒別に角加速度の平均値を演算し、もっとも角加速度の平均値が大きい気筒番号が異常気筒の気筒番号(Cyl_Mal)と一致したとき、当該気筒の角加速度の平均値をM_omega_Cyl_Mal(異常気筒の角加速度の平均値)とする。
(3)M_omega_Cyl_Malに基づいて、当該気筒(異常気筒)の点火時期をリタード側に補正する(ADV_Hos_n)。
In the second embodiment, the following processes are controlled.
・ Stage 1 (when f_stage = 1)
(1) The angular acceleration dispersion value is calculated for each cylinder, and the cylinder having the largest angular acceleration dispersion value (the leanest cylinder: the lean cylinder) is detected as an abnormal cylinder (Cyl_Mal). The dispersion value of the angular acceleration of the cylinder number Cyl_Mal, that is, the abnormal cylinder is V_omega_Cyl_Mal.
(2) On the basis of V_omega_Cyl_Mal, the fuel injection amount is increased and corrected for the abnormal cylinder (F_Hos_n).
・ When stage 2 (when f_stage = 2)
(1) Implemented after
(2) Calculate the average value of angular acceleration for each cylinder, and when the cylinder number with the largest average value of angular acceleration matches the cylinder number (Cyl_Mal) of the abnormal cylinder, the average value of angular acceleration of the cylinder is M_omega_Cyl_Mal (abnormal Average value of the angular acceleration of the cylinder).
(3) Based on M_omega_Cyl_Mal, the ignition timing of the cylinder (abnormal cylinder) is corrected to the retard side (ADV_Hos_n).
以下に、気筒別燃料噴射量補正値演算部165と気筒別点火時期補正値演算部241の詳細説明を行う。
Hereinafter, the cylinder specific fuel injection amount correction
<気筒別燃料噴射量補正値演算部(図24)>
図24は、気筒別燃料噴射量補正値演算部の機能を示すブロック線図である。
図23に示す気筒別燃料噴射量補正値演算部165では、前述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の燃料噴射量補正値(F_Hos_n(nは気筒番号))を演算する。具体的には、図24に示されるように、f_stage=1かつfp_hosei=1のとき、下記の処理を実施する。
・気筒番号が、Cyl_Mal(異常気筒番号)の燃料噴射量補正値のみ、本演算部で演算される値とする。それ以外の気筒のF_Hos_n(気筒別燃料噴射量補正値)は、1.0とする。
・V_omega_Cyl_Malからテーブル(Tbl_V_omega_F_Hos)251を参照して、補正対象気筒(気筒番号がCyl_Mal)のF_Hos_n(気筒別燃料噴射量補正値)とする。
<Cylinder-specific fuel injection amount correction value calculation unit (FIG. 24)>
FIG. 24 is a block diagram showing the function of the cylinder specific fuel injection amount correction value calculator.
In the cylinder specific fuel injection amount correction
Only the fuel injection amount correction value with the cylinder number Cyl_Mal (abnormal cylinder number) is the value calculated by this calculation unit. F_Hos_n (cylinder fuel injection amount correction value) for other cylinders is set to 1.0.
Referring to the table (Tbl_V_omega_F_Hos) 251 from V_omega_Cyl_Mal, F_Hos_n (cylinder-specific fuel injection amount correction value) of the correction target cylinder (cylinder number is Cyl_Mal) is set.
Tbl_V_omega_F_Hosの設定値は、角加速度の分散値と空燃比の関係を表すもので、実機試験の結果から決めるのが良い。 The set value of Tbl_V_omega_F_Hos represents the relationship between the dispersion value of angular acceleration and the air-fuel ratio, and should be determined from the results of actual machine tests.
<気筒別点火時期補正値演算部(図25)>
図25は、気筒別点火時期補正値演算部の機能を示すブロック線図である。
図23に示す気筒別点火時期補正値演算部241では、前述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の点火時期補正値(ADV_Hos_n(nは気筒番号))を演算する。具体的には、図25に示されるように、f_stage=2かつfp_hosei=1のとき、下記の処理を実施する。
(1)気筒番号が、Cyl_Mal(異常気筒番号)の点火時期補正値のみ、本演算部で演算される値とする。それ以外の気筒のADV_Hos_n(気筒別点火時期補正値)は、0とする。
(2)M_omega_Cyl_Malからテーブル(Tbl_M_omega_ADV)261を参照して、補正対象気筒(気筒番号がCyl_Mal)のADV_Hos_n(気筒別点火時期補正値)とする。
<Ignition Timing Correction Value Calculation Unit for Each Cylinder (FIG. 25)>
FIG. 25 is a block diagram showing the function of the cylinder specific ignition timing correction value calculator.
In the cylinder specific ignition timing correction
(1) Only the ignition timing correction value whose cylinder number is Cyl_Mal (abnormal cylinder number) is a value calculated by this calculation unit. ADV_Hos_n (cylinder specific ignition timing correction value) of other cylinders is set to zero.
(2) With reference to the table (Tbl_M_omega_ADV) 261 from M_omega_Cyl_Mal, ADV_Hos_n (cylinder specific ignition timing correction value) of the correction target cylinder (cylinder number is Cyl_Mal) is set.
Tbl_M_omega_ADVの設定値は、角加速度の平均値と点火時期リタード量の関係を表すもので、実機試験の結果から決めるのが良い。 The set value of Tbl_M_omega_ADV represents the relationship between the average value of angular acceleration and the ignition timing retard amount, and should be determined from the results of actual machine tests.
実施例2の制御装置1Bによれば、異常気筒の燃料噴射量を増量補正して、異常気筒の空燃比をリッチ側に補正する。そして、異常気筒の空燃比を燃料量増量補正によりリッチ側に補正した後、燃料量増量補正した異常気筒の角加速度もしくはその平均値と、異常気筒以外の他の気筒の角加速度もしくはその平均値とを比較し、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より大きいときは、異常気筒の空気量が、異常気筒以外の他の気筒の空気量より多いと判断する。すなわち、異常気筒を燃料量増量により補正した後、異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値をあらためて比較する。
According to the
このとき、異常気筒のリーン化の原因が意図せぬ空気量増量であった場合、燃料量増量補正により、異常気筒の空燃比は適正化(目標空燃比近傍に収束)されるものの、異常気筒以外の他の気筒と比較して、供給燃料量が多くなるため、発生トルクは大きくなる。すなわち、異常気筒の燃焼時に発生する角加速度は、異常気筒以外の他の気筒の燃焼時に発生する角加速度と比較して大きくなる。 At this time, if the cause of the leaning of the abnormal cylinder is an unintended increase in the air amount, the air-fuel ratio of the abnormal cylinder is optimized (converges near the target air-fuel ratio) by the fuel amount increase correction, but the abnormal cylinder Compared to other cylinders other than the above, the amount of fuel to be supplied increases, so the generated torque increases. That is, the angular acceleration generated when the abnormal cylinder burns is larger than the angular acceleration generated when the other cylinders other than the abnormal cylinder burn.
したがって、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より大きいときは、異常気筒の空気量が、異常気筒以外の他の気筒の空気量より多かったと判断することができる。 Therefore, when the angular acceleration of the abnormal cylinder or its average value is larger than the angular acceleration of other cylinders other than the abnormal cylinder or its average value, the air amount of the abnormal cylinder is larger than the air amount of the other cylinders other than the abnormal cylinder. Can be judged.
そして、空気量が多いと判断された異常気筒の点火時期をリタード側に補正する。すなわち、空気量が多いと判定された異常気筒の発生トルクと、異常気筒以外の他の気筒の発生トルクとの差をなくすために、異常気筒の点火時期をリタード側に補正する。その結果、異常気筒と異常気筒以外の他の気筒との間における空燃比およびトルクのばらつきをなくすことができる。 Then, the ignition timing of the abnormal cylinder determined to have a large amount of air is corrected to the retard side. That is, the ignition timing of the abnormal cylinder is corrected to the retard side in order to eliminate the difference between the generated torque of the abnormal cylinder determined to have a large amount of air and the generated torque of other cylinders other than the abnormal cylinder. As a result, it is possible to eliminate variations in air-fuel ratio and torque between the abnormal cylinder and other cylinders other than the abnormal cylinder.
[実施例3:図26〜図29]
実施例3では、異常気筒の空気量を減量補正して異常気筒の空燃比をリッチ側に補正し、補正後の異常気筒のトルクが異常気筒以外の他の気筒のトルクよりも小さいときは、異常気筒の燃料量と空気量を増量補正することを特徴とする。
図26は、実施例3の制御装置1Cを示す制御システム図である。
[Example 3: Figs. 26 to 29]
In the third embodiment, the air amount of the abnormal cylinder is corrected to be reduced to correct the air-fuel ratio of the abnormal cylinder to the rich side, and when the torque of the corrected abnormal cylinder is smaller than the torque of other cylinders other than the abnormal cylinder, The fuel quantity and air quantity of the abnormal cylinder are increased and corrected.
FIG. 26 is a control system diagram illustrating the
本実施例3では、上述の実施例1に対して、気筒別角加速度特性演算部164、気筒別燃料噴射量補正値演算部165、気筒別空気量補正値演算部166の仕様が異なるだけであり、他の手段は略同様であるので、以下においては、仕様が異なる演算部について重点的に説明する。
The third embodiment differs from the first embodiment only in the specifications of the cylinder specific angular acceleration
実施例3では、下記プロセスの制御を実施する。
・ステージ1(f_stage=1のとき)
(1)気筒別に角加速度の分散値を演算し、もっとも角加速度の分散値が大きい気筒(もっともリーンな気筒:リーン気筒)を異常気筒として検出する(Cyl_Mal)。気筒番号Cyl_Malの気筒(異常気筒)の角加速度の分散値をV_omega_Cyl_Malとする。
(2)V_omega_Cyl_Malに基づいて、もっともリーンな気筒(異常気筒)に対して、空気量を減量補正する(IVO_Hos_n, IVC_Hos_n)。
・ステージ2(f_stage=2のとき)
(1)ステージ1の終了後に実施。
(2)気筒別に角加速度の平均値を演算し、もっとも角加速度の平均値が小さい気筒の気筒番号がCyl_Mal(異常気筒の気筒番号)と一致したとき、当該気筒(異常気筒)の角加速度の平均値をM_omega_Cyl_Mal(異常気筒の角加速度の平均値)とする。
(3)M_omega_Cyl_Malに基づいて、当該気筒(異常気筒)の燃料噴射量および空気量を増量補正する(F_Hos_n, IVO_Hos_n, IVC_Hos_n)。
In the third embodiment, the following processes are controlled.
・ Stage 1 (when f_stage = 1)
(1) The angular acceleration dispersion value is calculated for each cylinder, and the cylinder having the largest angular acceleration dispersion value (the leanest cylinder: the lean cylinder) is detected as an abnormal cylinder (Cyl_Mal). A dispersion value of angular acceleration of a cylinder (cylinder cylinder) with cylinder number Cyl_Mal is V_omega_Cyl_Mal.
(2) Based on V_omega_Cyl_Mal, the air amount is corrected to be reduced for the leanest cylinder (abnormal cylinder) (IVO_Hos_n, IVC_Hos_n).
・ Stage 2 (when f_stage = 2)
(1) Implemented after
(2) Calculate the average value of angular acceleration for each cylinder, and when the cylinder number of the cylinder with the smallest average value of angular acceleration matches Cyl_Mal (cylinder number of abnormal cylinder), the angular acceleration of the cylinder (abnormal cylinder) Let the average value be M_omega_Cyl_Mal (average value of angular acceleration of abnormal cylinders).
(3) Based on M_omega_Cyl_Mal, the fuel injection amount and air amount of the cylinder (abnormal cylinder) are increased and corrected (F_Hos_n, IVO_Hos_n, IVC_Hos_n).
以下に、本実施例3における気筒別角加速度特性演算部164、気筒別燃料噴射量補正値演算部165、気筒別空気量補正値演算部166の詳細説明を行う。
Hereinafter, the cylinder specific angular acceleration
<気筒別角加速度特性演算部(図27)>
図27は、気筒別角加速度特性演算部の機能を示すブロック線図である。
図26に示す気筒別角加速度特性演算部164では、各ステージに応じて、気筒別角加速度特性である異常気筒の気筒番号(Cyl_Mal)、異常気筒の角加速度の分散値(V_omega_Cyl_Mal)、異常気筒の角加速度の平均値( M_omega_Cyl_Mal)を演算する。
<Cylinder-specific angular acceleration characteristic calculation unit (FIG. 27)>
FIG. 27 is a block diagram showing the function of the cylinder specific angular acceleration characteristic calculating section.
In the cylinder specific angular acceleration
具体的には、図27に示されるように、fp_kensyutsu(検出許可フラグ)=1のとき、下記の処理を実施する。
・エンジン回転速度(Ne)から、気筒毎の角加速度(omega_n)を演算する。ここにnは、気筒番号を示す。角加速度(omega_n)は、燃焼周期毎にNeの平均値を求め、前回Neとの差とする。
・ステージ1のとき(f_stage=1のとき)
(1)omega_nから、所定サイクル間における気筒毎のomega_nの分散値(V_omega_n)を求める。
(2)V_omega_nがもっとも大きい気筒番号をCyl_Mal(異常気筒番号)とし、気筒番号がCyl_MalのV_omega_nをV_omega_Cyl_Mal(異常気筒の角加速度の分散値)とする。
(3)fp_kensyutsu=0→1となって、最初のCyl_MalおよびV_omwga_Cyl_Malが求まったとき、fp_hosei(補正許可フラグ)=1とする。
(4)V_omega_Cyl_Malがその他の気筒のV_omega_n以下となったら、fp_hosei=0、f_ch_stageを1回だけ1とする。
Specifically, as shown in FIG. 27, when fp_kensyutsu (detection permission flag) = 1, the following processing is performed.
-Calculate the angular acceleration (omega_n) for each cylinder from the engine speed (Ne). Here, n indicates a cylinder number. For the angular acceleration (omega_n), an average value of Ne is obtained for each combustion cycle, and is defined as a difference from the previous Ne.
・ Stage 1 (when f_stage = 1)
(1) From omega_n, the dispersion value (V_omega_n) of omega_n for each cylinder during a predetermined cycle is obtained.
(2) The cylinder number with the largest V_omega_n is Cyl_Mal (abnormal cylinder number), and V_omega_n with the cylinder number Cyl_Mal is V_omega_Cyl_Mal (dispersion value of angular acceleration of the abnormal cylinder).
(3) When fp_kensyutsu = 0 → 1 and the first Cyl_Mal and V_omwga_Cyl_Mal are obtained, fp_hosei (correction permission flag) = 1.
(4) When V_omega_Cyl_Mal becomes equal to or less than V_omega_n of other cylinders, fp_hosei = 0 and f_ch_stage are set to 1 only once.
・ステージ2のとき(f_stage=2のとき)
(1)omega_nから、所定サイクル間における気筒毎のomega_nの平均値(M_omega_n)を求める。
(2)M_omega_nがもっとも小さい気筒の気筒番号が、Cyl_Mal(異常気筒の気筒番号)のとき、気筒番号がCyl_MalのM_omega_nをM_omega_Cyl_Mal(異常気筒の角加速度の平均値)とする。
(3)fp_kensyutsu=0→1となって、最初のCyl_MalおよびM_omwga_Cyl_Malが求まったとき、fp_hosei(補正許可フラグ)=1とする。
(4)M_omega_Cyl_Malがその他の気筒のM_omega_n以上となったら、fp_hosei=0、f_ch_stageを1回だけ1とする。
(5)fp_kensyutsu=0のとき、fp_hosei=0とする。
・ When stage 2 (when f_stage = 2)
(1) An average value (M_omega_n) of omega_n for each cylinder during a predetermined cycle is obtained from omega_n.
(2) When the cylinder number of the cylinder with the smallest M_omega_n is Cyl_Mal (cylinder number of the abnormal cylinder), M_omega_n with the cylinder number Cyl_Mal is set to M_omega_Cyl_Mal (average value of angular acceleration of the abnormal cylinder).
(3) When fp_kensyutsu = 0 → 1 and the first Cyl_Mal and M_omwga_Cyl_Mal are obtained, fp_hosei (correction permission flag) = 1.
(4) When M_omega_Cyl_Mal becomes equal to or greater than M_omega_n of other cylinders, fp_hosei = 0 and f_ch_stage is set to 1 only once.
(5) When fp_kensyutsu = 0, fp_hosei = 0.
<気筒別燃料噴射量補正値演算部(図28)>
図28は、気筒別燃料噴射量補正値演算部の機能を示すブロック線図である。
図26に示す気筒別燃料噴射量補正値演算部165では、前述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の燃料噴射量補正値(F_Hos_n(nは気筒番号))を演算する。具体的には、図28に示されるように、f_stage=2かつfp_hosei=1のとき、下記の処理を実施する。
・気筒番号が、Cyl_Malの燃料噴射量補正値のみ、本演算部で演算される値とする。それ以外の気筒のF_Hos_n(気筒別燃料噴射量補正値)は、1.0とする。
・M_omega_Cyl_Malからテーブル(Tbl_M_omega_F_Hos)291を参照して、補正対象気筒(気筒番号がCyl_Mal)のF_Hos_n(気筒別燃料噴射量補正値)とする。
<Cylinder-specific fuel injection amount correction value calculation unit (FIG. 28)>
FIG. 28 is a block diagram showing the function of the cylinder specific fuel injection amount correction value calculation unit.
In the cylinder specific fuel injection amount correction
Only the fuel injection amount correction value with the cylinder number Cyl_Mal is a value calculated by this calculation unit. F_Hos_n (cylinder fuel injection amount correction value) for other cylinders is set to 1.0.
Referring to the table (Tbl_M_omega_F_Hos) 291 from M_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set as F_Hos_n (fuel injection amount correction value for each cylinder).
Tbl_M_omega_F_Hosの設定値は、角加速度の平均値とトルク(充填効率相当燃料噴射量)の関係を表すもので、実機試験の結果から決めるのが良い。すなわち、気筒番号Cyl_Malの気筒(異常気筒)の角加速度平均値が、その他の気筒(異常気筒以外の他の気筒)の角加速度平均値よりも小さいとき、本演算部による補正を実施する。 The set value of Tbl_M_omega_F_Hos represents the relationship between the average value of angular acceleration and torque (fuel injection amount corresponding to charging efficiency), and should be determined from the results of actual machine tests. That is, when the average angular acceleration value of the cylinder having the cylinder number Cyl_Mal (abnormal cylinder) is smaller than the average angular acceleration values of the other cylinders (other cylinders other than the abnormal cylinder), correction by this calculation unit is performed.
角加速度の大きさは、当該気筒(異常気筒)のトルクの大きさと相関があるので、気筒番号Cyl_Malの気筒(異常気筒)のトルクが、その他の気筒(異常気筒以外の他の気筒)と同じになるように当該気筒(異常気筒)の燃料量を多くするものである。なお、燃料量のみ多くすると、当該気筒(異常気筒)はリッチになるので、後述の気筒別空気量補正値演算部166で、当該気筒(異常気筒)の空気量(充填効率)も併せて多くする。
Since the magnitude of the angular acceleration has a correlation with the magnitude of the torque of the cylinder (abnormal cylinder), the torque of the cylinder (Cyl_Mal) with the cylinder number Cyl_Mal is the same as other cylinders (other cylinders other than the abnormal cylinder). Thus, the fuel amount of the cylinder (abnormal cylinder) is increased. Note that when only the fuel amount is increased, the cylinder (abnormal cylinder) becomes rich. Therefore, the air amount correction
<気筒別空気量補正値演算部(図29)>
図29は、気筒別空気量補正値演算部166の機能を示すブロック線図である。
図26に示す気筒別空気量補正値演算部166では、前述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の空気量補正値(IVO_Hos_n, IVC_Hos(nは気筒番号))を演算する。具体的には、図29に示されるように、fp_hosei=1のとき、下記の処理を実施する。
・気筒番号がCyl_Malの空気量補正値のみ、本演算部で演算される値とする。それ以外の気筒のIVO_Hos_nおよびIVC_Hos_nは、0とする。
・ステージ1のとき(f_stage=1のとき)>
(1)V_omega_Cyl_Malからテーブル(Tbl_V_omega_IVO)301を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVO_Hos_nとする。
(2)V_omega_Cyl_Malからテーブル(Tbl_V_omega_IVC)303を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVC_Hos_nとする。
<Air amount correction value calculation unit for each cylinder (FIG. 29)>
FIG. 29 is a block diagram illustrating the function of the cylinder-by-cylinder air amount correction
In the cylinder-by-cylinder air amount correction
-Only the air amount correction value with the cylinder number Cyl_Mal is the value calculated by this calculation unit. IVO_Hos_n and IVC_Hos_n of other cylinders are set to 0.
・ Stage 1 (when f_stage = 1)>
(1) With reference to the table (Tbl_V_omega_IVO) 301 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to IVO_Hos_n.
(2) Referring to the table (Tbl_V_omega_IVC) 303 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to IVC_Hos_n.
・ステージ2のとき(f_stage=2のとき)>
(1)M_omega_Cyl_Malからテーブル(Tbl_M_omega_IVO)302を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVO_Hos_nとする。
(2)M_omega_Cyl_Malからテーブル(Tbl_M_omega_IVC)304を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVC_Hos_nとする。
・ When stage 2 (when f_stage = 2)>
(1) With reference to the table (Tbl_M_omega_IVO) 302 from M_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to IVO_Hos_n.
(2) With reference to the table (Tbl_M_omega_IVC) 304 from M_omega_Cyl_Mal, IVC_Hos_n of the correction target cylinder (cylinder number is Cyl_Mal) is set.
Tbl_V_omega_IVO_HosおよびTbl_V_omega_IVC_Hosの設定値は、角加速度の角加速度の分散値と空燃比の関係を表すもので、実機試験の結果から決めるのが良い。そして、Tbl_M_omega_IVO_HosおよびTbl_M_omega_IVC_Hosの設定値は、角加速度の角加速度の平均値とトルク(充填効率)の関係を表すもので、実機試験の結果から決めるのが良い。 The set values of Tbl_V_omega_IVO_Hos and Tbl_V_omega_IVC_Hos represent the relationship between the angular acceleration dispersion value and the air-fuel ratio, and should be determined from the results of actual machine tests. The set values of Tbl_M_omega_IVO_Hos and Tbl_M_omega_IVC_Hos represent the relationship between the average value of angular acceleration and torque (filling efficiency), and are preferably determined from the results of actual machine tests.
気筒番号Cyl_Malの気筒(異常気筒)の角加速度平均値がその他の気筒(異常気筒以外の他の気筒)の角加速度平均値よりも小さいとき、本演算部による補正を実施する。角加速度の大きさは、当該気筒(異常気筒)のトルクの大きさと相関があるので、気筒番号Cyl_Malの気筒(異常気筒)のトルクが、その他の気筒(異常気筒以外の他の気筒)と同じになるように当該気筒(異常気筒)の空気量(充填効率)を多くするものである。なお、空気量のみ多くすると、当該気筒(異常気筒)はリーンになるので、前述の気筒別燃料量補正値演算部165で、異常気筒の燃料量も併せて多くする。
When the average angular acceleration value of the cylinder having the cylinder number Cyl_Mal (abnormal cylinder) is smaller than the average angular acceleration value of the other cylinders (cylinders other than the abnormal cylinder), correction is performed by this calculation unit. Since the magnitude of the angular acceleration has a correlation with the magnitude of the torque of the cylinder (abnormal cylinder), the torque of the cylinder (Cyl_Mal) with the cylinder number Cyl_Mal is the same as other cylinders (other cylinders other than the abnormal cylinder). Thus, the air amount (filling efficiency) of the cylinder (abnormal cylinder) is increased. Note that if only the air amount is increased, the cylinder (abnormal cylinder) becomes lean, so that the fuel amount of the abnormal cylinder is also increased in the above-described cylinder-specific fuel amount correction
実施例3の制御装置1Cによれば、異常気筒の空気量を減量補正して、異常気筒の空燃比をリッチ側に補正する。そして、異常気筒の空燃比を空気量減量補正によりリッチ側に補正した後、空気量減量補正した異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値を比較し、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より小さいときは、異常気筒の燃料量が、異常気筒以外の他の気筒の燃料量より少ないと判断する。すなわち、異常気筒を空気量減量により補正した後、異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値をあらためて比較する。 According to the control device 1C of the third embodiment, the air amount of the abnormal cylinder is corrected to decrease, and the air-fuel ratio of the abnormal cylinder is corrected to the rich side. Then, after correcting the air-fuel ratio of the abnormal cylinder to the rich side by the air amount reduction correction, the angular acceleration of the abnormal cylinder corrected by the air amount reduction or the average value thereof and the angular acceleration of other cylinders other than the abnormal cylinder or the average value thereof are calculated. In comparison, when the angular acceleration of the abnormal cylinder or its average value is smaller than the angular acceleration of the other cylinders other than the abnormal cylinder or its average value, the fuel amount of the abnormal cylinder is greater than the fuel amount of the other cylinders other than the abnormal cylinder. Judge that there are few. That is, after correcting the abnormal cylinder by reducing the air amount, the angular acceleration of the abnormal cylinder or its average value is compared with the angular acceleration of other cylinders other than the abnormal cylinder or its average value.
このとき、異常気筒のリーン化の原因が意図せぬ燃料量減量であった場合、空気量減量補正により、異常気筒の空燃比は適正化(目標空燃比近傍に収束)されるものの、異常気筒以外の他の気筒と比較して、供給燃料量が少ないため、発生トルクは小さくなる。すなわち、異常気筒の燃焼時に発生する角加速度は、異常気筒以外の他の気筒の燃焼時に発生する角加速度と比較して小さくなる。 At this time, if the cause of leaning of the abnormal cylinder is an unintended fuel amount reduction, the air-fuel ratio of the abnormal cylinder is optimized (convergence converged near the target air-fuel ratio) by the air amount reduction correction, but the abnormal cylinder Compared to other cylinders, the amount of fuel supplied is small, so the generated torque is small. That is, the angular acceleration generated when the abnormal cylinder burns is smaller than the angular acceleration generated when the other cylinders other than the abnormal cylinder burn.
したがって、異常気筒の角加速度もしくはその平均値が、異常気筒以外の他の気筒の角加速度もしくはその平均値よりも小さいときは、異常気筒の燃料量が、異常気筒以外の他の気筒の燃料量より少なかったと判断することができる。 Therefore, when the angular acceleration of the abnormal cylinder or the average value thereof is smaller than the angular acceleration of the other cylinders other than the abnormal cylinder or the average value thereof, the fuel amount of the abnormal cylinder is equal to the fuel amount of the other cylinders other than the abnormal cylinder. It can be judged that there was less.
そして、燃料量が少ないと判断された異常気筒の空気量および燃料量を多くなるように補正する。すなわち、燃料量が少ないと判定された異常気筒の発生トルクと、異常気筒以外の他の気筒の発生トルクとの差をなくすために、その原因である異常気筒の燃料量を多くなるように補正する。 And it correct | amends so that the air quantity and fuel quantity of an abnormal cylinder judged that there are few fuel quantities may be increased. In other words, in order to eliminate the difference between the generated torque of the abnormal cylinder determined to have a small amount of fuel and the generated torque of other cylinders other than the abnormal cylinder, the correction is made to increase the fuel amount of the abnormal cylinder that is the cause. To do.
このとき、異常気筒の空燃比がリッチにならないように、燃料量増量分に応じて、空気量も多く補正する。その結果、異常気筒と異常気筒以外の他の気筒との間における空燃比およびトルクのばらつきをなくすことができる。 At this time, the air amount is corrected to be large in accordance with the fuel amount increase so that the air-fuel ratio of the abnormal cylinder does not become rich. As a result, it is possible to eliminate variations in air-fuel ratio and torque between the abnormal cylinder and other cylinders other than the abnormal cylinder.
[実施例4:図30〜図32]
実施例4では、異常気筒の空気量を減量補正して異常気筒の空燃比をリッチ側に補正し、補正後の異常気筒のトルクが異常気筒以外の他の気筒のトルクよりも小さいときは、異常気筒の点火時期を進角補正することを特徴とする。
[Example 4: Figs. 30 to 32]
In the fourth embodiment, the amount of air in the abnormal cylinder is corrected to decrease, the air-fuel ratio of the abnormal cylinder is corrected to the rich side, and the corrected abnormal cylinder torque is smaller than the torque of other cylinders other than the abnormal cylinder, The ignition timing of the abnormal cylinder is corrected to advance.
図30は、実施例4の制御装置1Dを示す制御システム図である。
本実施例4では、上述の実施例3に対して、気筒別空気量補正値演算部166の仕様が異なる。また、実施例3の気筒別燃料噴射量補正値演算部165に対応するものがなく、新たに気筒別点火時期補正値演算部311が用意される点が異なる。他の手段は、実施例3のものと略同様な構成であるので、以下においては、実施例3と異なる部分について重点的に説明する。
FIG. 30 is a control system diagram illustrating a
The fourth embodiment is different from the third embodiment in the specification of the cylinder-by-cylinder air amount correction
実施例4では、下記プロセスの制御を実施する。
・ステージ1(f_stage=1)
(1)気筒別に角加速度の分散値を演算し、もっとも角加速度の分散値が大きい気筒(もっともリーンな気筒)を異常気筒として検出する(Cyl_Mal)。気筒番号Cyl_Mal、すなわち異常気筒の角加速度の分散値をV_omega_Cyl_Malとする。
(2)V_omega_Cyl_Malに基づいて、もっともリーンな気筒(異常気筒)に対して、空気量を減量補正する(IVO_Hos_n, IVC_Hos_n)。
In the fourth embodiment, the following processes are controlled.
・ Stage 1 (f_stage = 1)
(1) The angular acceleration dispersion value is calculated for each cylinder, and the cylinder with the largest angular acceleration dispersion value (the leanest cylinder) is detected as an abnormal cylinder (Cyl_Mal). The cylinder number Cyl_Mal, that is, the dispersion value of the angular acceleration of the abnormal cylinder is V_omega_Cyl_Mal.
(2) Based on V_omega_Cyl_Mal, the air amount is corrected to be reduced for the leanest cylinder (abnormal cylinder) (IVO_Hos_n, IVC_Hos_n).
・ステージ2(f_stage=2)
(1)ステージ1の終了後に実施。
(2)気筒別に角加速度の平均値を演算し、もっとも角加速度の平均値が小さい気筒番号が異常気筒の気筒番号Cyl_Malと一致したとき、当該気筒(異常気筒)の角加速度の平均値をM_omega_Cyl_Malとする。
(3)M_omega_Cyl_Malに基づいて、当該気筒(異常気筒)の点火時期を進角側に補正する(ADV_Hos_n)。
・ Stage 2 (f_stage = 2)
(1) Implemented after
(2) The average value of angular acceleration is calculated for each cylinder, and when the cylinder number with the smallest average value of angular acceleration matches the cylinder number Cyl_Mal of the abnormal cylinder, the average value of angular acceleration of the cylinder (abnormal cylinder) is calculated as M_omega_Cyl_Mal And
(3) Based on M_omega_Cyl_Mal, the ignition timing of the cylinder (abnormal cylinder) is corrected to the advance side (ADV_Hos_n).
以下に、気筒別点火時期補正値演算部311と気筒別空気量補正値演算部166の詳細説明を行う。
Hereinafter, the cylinder specific ignition timing correction
<気筒別点火時期補正値演算部(図31)>
図31は、気筒別点火時期補正値演算部の機能を示すブロック線図である。
図30に示す気筒別点火時期補正値演算部311では、前述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の点火時期補正値(ADV_Hos_n(nは気筒番号))を演算する。具体的には、図31に示されるように、f_stage=2かつfp_hosei=1のとき、下記の処理を実施する。
・気筒番号が、Cyl_Mal(異常気筒番号)の点火時期補正値のみ、本制御部で演算される値とする。それ以外の気筒のADV_Hos_nは、0とする。
・M_omega_Cyl_Malからテーブル(Tbl_M_omega_ADV)321を参照して、補正対象気筒(気筒番号がCyl_Mal)のADV_Hos_n(気筒別点火時期補正値)とする。Tbl_M_omega_ADVの設定値は、角加速度の平均値と点火時期進角量の関係を表すもので、実機試験の結果から決めるのが良い。
<Ignition Timing Correction Value Calculation Unit for Each Cylinder (FIG. 31)>
FIG. 31 is a block diagram showing the function of the cylinder specific ignition timing correction value calculator.
In the cylinder specific ignition timing correction
Only the ignition timing correction value with the cylinder number Cyl_Mal (abnormal cylinder number) is a value calculated by this control unit. ADV_Hos_n of other cylinders is set to zero.
Referring to the table (Tbl_M_omega_ADV) 321 from M_omega_Cyl_Mal, ADV_Hos_n (cylinder-specific ignition timing correction value) of the correction target cylinder (cylinder number is Cyl_Mal) is set. The set value of Tbl_M_omega_ADV represents the relationship between the average value of angular acceleration and the ignition timing advance amount, and should be determined from the results of actual machine tests.
<気筒別空気量補正値演算部(図32)>
図32は、気筒別空気量補正値演算部の機能を示すブロック線図である。
図30に示す気筒別空気量補正値演算部166では、前述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の空気量補正値(IVO_Hos_n, IVC_Hos(nは気筒番号))を演算する。具体的には、図32に示されるように、f_stage=1かつfp_hosei=1のとき、下記の処理を実施する。
(1)気筒番号が、Cyl_Mal(異常気筒番号)の空気量補正値のみ、本演算部で演算される値とする。それ以外の気筒のIVO_Hos_nおよびIVC_Hos_nは、0とする。
(2)V_omega_Cyl_Malからテーブル(Tbl_V_omega_IVO)331を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVO_Hos_nとする。
(3)V_omega_Cyl_Malからテーブル(Tbl_V_omega_IVC)332を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVC_Hos_nとする。Tbl_V_omega_IVO_HosおよびTbl_V_omega_IVC_Hosの設定値は、角加速度の角加速度の分散値と空燃比の関係を表すもので、実機試験の結果から決めるのが良い。
<Air amount correction value calculation unit for each cylinder (FIG. 32)>
FIG. 32 is a block diagram illustrating the function of the cylinder-specific air amount correction value calculation unit.
In the cylinder-specific air amount correction
(1) Only an air amount correction value with a cylinder number of Cyl_Mal (abnormal cylinder number) is set as a value calculated by this calculation unit. IVO_Hos_n and IVC_Hos_n of other cylinders are set to 0.
(2) With reference to the table (Tbl_V_omega_IVO) 331 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set as IVO_Hos_n.
(3) With reference to the table (Tbl_V_omega_IVC) 332 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to IVC_Hos_n. The set values of Tbl_V_omega_IVO_Hos and Tbl_V_omega_IVC_Hos represent the relationship between the angular acceleration dispersion value and the air-fuel ratio, and should be determined from the results of actual machine tests.
実施例4の制御装置1Dによれば、異常気筒の空気量を減量補正して、異常気筒の空燃比をリッチ側に補正する。そして、異常気筒の空燃比を空気量減量補正によりリッチ側に補正した後、空気量減量補正した異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値を比較し、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より小さいときは、異常気筒の燃料量が、異常気筒以外の他の気筒の燃料量より少ないと判断する。すなわち、異常気筒を空気量減量により補正した後、異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値をあらためて比較する。
According to the
このとき、異常気筒のリーン化の原因が意図せぬ燃料量減量であった場合、空気量減量補正により、異常気筒の空燃比は適正化(目標空燃比近傍に収束)されるものの、異常気筒以外の他の気筒と比較して、供給燃料量が少ないため、発生トルクは小さくなる。すなわち、異常気筒の燃焼時に発生する角加速度は、異常気筒以外の他の気筒の燃焼時に発生する角加速度と比較して小さくなる。 At this time, if the cause of leaning of the abnormal cylinder is an unintended fuel amount reduction, the air-fuel ratio of the abnormal cylinder is optimized (convergence converged near the target air-fuel ratio) by the air amount reduction correction, but the abnormal cylinder Compared to other cylinders, the amount of fuel supplied is small, so the generated torque is small. That is, the angular acceleration generated when the abnormal cylinder burns is smaller than the angular acceleration generated when the other cylinders other than the abnormal cylinder burn.
したがって、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より小さいときは、異常気筒の燃料量が、異常気筒以外の他の気筒の燃料量より少なかったと判断することができる。 Therefore, when the angular acceleration of the abnormal cylinder or its average value is smaller than the angular acceleration of other cylinders other than the abnormal cylinder or its average value, the fuel amount of the abnormal cylinder is less than the fuel amount of the other cylinders other than the abnormal cylinder. Can be judged.
そして、燃料量が少ないと判断された異常気筒の点火時期を進角側に補正する。すなわち、燃料量が少ないと判定された異常気筒の発生トルクと、異常気筒以外の他の気筒の発生トルクとの差をなくすために、異常気筒の点火時期を進角側に補正する。その結果、異常気筒と異常気筒以外の他の気筒との間における空燃比およびトルクのばらつきをなくすことができる。 Then, the ignition timing of the abnormal cylinder determined to have a small amount of fuel is corrected to the advance side. That is, the ignition timing of the abnormal cylinder is corrected to the advance side in order to eliminate the difference between the generated torque of the abnormal cylinder determined to have a small amount of fuel and the generated torque of other cylinders other than the abnormal cylinder. As a result, it is possible to eliminate variations in air-fuel ratio and torque between the abnormal cylinder and other cylinders other than the abnormal cylinder.
[実施例5:図33]
実施例5では、異常気筒以外の他の気筒の燃料量を減量補正して異常気筒以外の他の気筒の空燃比をリーン側に補正し、補正後の異常気筒のトルクが異常気筒以外の他の気筒のトルクよりも大きいときは、異常気筒の燃料と空気量を減量補正することを特徴とする。
[Example 5: FIG. 33]
In the fifth embodiment, the fuel amount of the cylinders other than the abnormal cylinders is corrected to be reduced, the air-fuel ratio of the cylinders other than the abnormal cylinders is corrected to the lean side, and the corrected torque of the abnormal cylinders other than the abnormal cylinders is corrected. When the torque is larger than the cylinder torque, the amount of fuel and air in the abnormal cylinder is corrected to decrease.
本実施例5では、上述の実施例1に対して、気筒別燃料噴射量補正値演算部165の仕様が異なるだけであり、他の手段は略同様であるので、以下においては、仕様が異なる演算部について重点的に説明する。
The fifth embodiment is different from the first embodiment only in the specification of the cylinder-by-cylinder fuel injection amount correction
実施例5では、下記プロセスの制御を実施する。
・ステージ1(f_stage=1)
(1)気筒別に角加速度の分散値を演算し、もっとも角加速度の分散値が大きい気筒(もっともリーンな気筒:リーン気筒)を異常気筒として検出する(Cyl_Mal)。気筒番号Cyl_Malの気筒、すなわち異常気筒の角加速度の分散値をV_omega_Cyl_Malとする。
(2)V_omega_Cyl_Malに基づいて、もっともリーンな気筒(異常気筒)以外の気筒に対して、燃料噴射量を減量補正する(F_Hos_n)。
In the fifth embodiment, the following processes are controlled.
・ Stage 1 (f_stage = 1)
(1) The angular acceleration dispersion value is calculated for each cylinder, and the cylinder having the largest angular acceleration dispersion value (the leanest cylinder: the lean cylinder) is detected as an abnormal cylinder (Cyl_Mal). The dispersion value of the angular acceleration of the cylinder number Cyl_Mal, that is, the abnormal cylinder is V_omega_Cyl_Mal.
(2) Based on V_omega_Cyl_Mal, the fuel injection amount is corrected to decrease for the cylinders other than the leanest cylinder (abnormal cylinder) (F_Hos_n).
・ステージ2(f_stage=2)
(1)ステージ1の終了後に実施。
(2)気筒別に角加速度の平均値を演算し、もっとも角加速度の平均値が大きい気筒の気筒番号がCyl_Mal(異常気筒の気筒番号)と一致したとき、当該気筒(異常気筒)の角加速度の平均値をM_omega_Cyl_Mal(異常気筒の角加速度の平均値)とする。
(3)M_omega_Cyl_Malに基づいて、当該気筒(異常気筒)の燃料噴射量および空気量を減量補正する(F_Hos_n, IVO_Hos_n, IVC_Hos_n)。
以下に、本実施例5における気筒別燃料噴射量補正値演算部165の詳細を述べる。
・ Stage 2 (f_stage = 2)
(1) Implemented after
(2) Calculate the average value of angular acceleration for each cylinder, and when the cylinder number of the cylinder with the largest average value of angular acceleration matches Cyl_Mal (cylinder number of abnormal cylinder), the angular acceleration of the cylinder (abnormal cylinder) Let the average value be M_omega_Cyl_Mal (average value of angular acceleration of abnormal cylinders).
(3) Based on M_omega_Cyl_Mal, the fuel injection amount and air amount of the cylinder (abnormal cylinder) are corrected to decrease (F_Hos_n, IVO_Hos_n, IVC_Hos_n).
Details of the cylinder specific fuel injection amount correction
<気筒別燃料噴射量補正値演算部(図33)>
図33は、実施例5における気筒別燃料噴射量補正値演算部の機能を示すブロック線図である。本演算部では、上述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の燃料噴射量補正値(F_Hos_n(nは気筒番号))を演算する。具体的には、図33に示されるように、fp_hosei=1のとき、下記の処理を実施する。
・ステージ1のとき(f_stage=1のとき)>
(1)気筒番号が、Cyl_Mal以外の気筒の燃料噴射量補正値のみ、本演算部で演算される値とする。気筒番号がCyl_Malの気筒のF_Hos_nは、1.0とする。
(2)V_omega_Cyl_Malからテーブル(Tbl_V_omega_F_Hos)341を参照して、補正対象気筒(気筒番号がCyl_Mal以外の気筒)のF_Hos_nとする。
<Cylinder-specific fuel injection amount correction value calculation unit (FIG. 33)>
FIG. 33 is a block diagram illustrating functions of the cylinder specific fuel injection amount correction value calculation unit according to the fifth embodiment. This calculation unit calculates a fuel injection amount correction value (F_Hos_n (n is a cylinder number)) for each cylinder based on the angular acceleration characteristics obtained by the above-described angular acceleration
・ Stage 1 (when f_stage = 1)>
(1) Only the fuel injection amount correction value for cylinders other than the cylinder number Cyl_Mal is a value calculated by this calculation unit. F_Hos_n of the cylinder having the cylinder number Cyl_Mal is set to 1.0.
(2) With reference to the table (Tbl_V_omega_F_Hos) 341 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number other than Cyl_Mal) is set to F_Hos_n.
・ステージ2のとき(f_stage=2のとき)>
(1)気筒番号が、Cyl_Malの燃料噴射量補正値のみ、本演算部で演算される値とする。それ以外の気筒のF_Hos_nは、1.0とする。
(2)M_omega_Cyl_Malからテーブル(Tbl_M_omega_F_Hos)342を参照して、補正対象気筒(気筒番号がCyl_Mal)のF_Hos_nとする。
・ When stage 2 (when f_stage = 2)>
(1) Only the fuel injection amount correction value with a cylinder number of Cyl_Mal is a value calculated by this calculation unit. F_Hos_n of other cylinders is set to 1.0.
(2) With reference to the table (Tbl_M_omega_F_Hos) 342 from M_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to F_Hos_n.
Tbl_V_omega_F_Hosの設定値は、角加速度の分散値と空燃比の関係を表すもので、実機試験の結果から決めるのが良い。Tbl_M_omega_F_Hosの設定値は、角加速度の平均値とトルク(充填効率相当燃料噴射量)の関係を表すもので、実機試験の結果から決めるのが良い。すなわち、気筒番号Cyl_Malの気筒の角加速度平均値がその他の気筒の角加速度平均値よりも大きいとき、本演算部による補正を実施する。角加速度の大きさは、当該気筒のトルクの大きさと相関があるので、気筒番号Cyl_Malの気筒のトルクが、その他の気筒と同じになるように当該気筒の燃料量を少なくするものである。 The set value of Tbl_V_omega_F_Hos represents the relationship between the dispersion value of angular acceleration and the air-fuel ratio, and should be determined from the results of actual machine tests. The set value of Tbl_M_omega_F_Hos represents the relationship between the average value of angular acceleration and torque (fuel injection amount corresponding to charging efficiency), and should be determined from the results of actual machine tests. That is, when the average angular acceleration value of the cylinder with the cylinder number Cyl_Mal is larger than the average angular acceleration values of the other cylinders, correction by this calculation unit is performed. Since the magnitude of the angular acceleration has a correlation with the magnitude of the torque of the cylinder, the amount of fuel in the cylinder is reduced so that the torque of the cylinder having the cylinder number Cyl_Mal is the same as that of the other cylinders.
なお、燃料量のみ少なくすると、異常気筒はリーンになるので、上述の気筒別空気量補正値演算部166で、異常気筒の空気量(充填効率)も併せて少なくする。
If only the fuel amount is reduced, the abnormal cylinder becomes lean. Therefore, the air amount (filling efficiency) of the abnormal cylinder is also reduced by the above-described cylinder-by-cylinder air amount correction
実施例5の制御装置1Aによれば、異常気筒以外の他の気筒の燃料量を減量補正して、異常気筒以外の他の気筒の空燃比をリーン側に補正する。
According to the
このとき、排気管集合部の空燃比(全気筒の平均空燃比)は、異常気筒以外の気筒の空燃比をリーン側に補正した影響で、一時的にリーン側にずれるが、その分、全気筒一律にリッチ側に補正するように、空燃比フィードバック制御が機能するので、その結果、全ての気筒の空燃比が目標空燃比近傍に制御されることになる。 At this time, the air-fuel ratio (average air-fuel ratio of all cylinders) of the exhaust pipe collecting portion temporarily shifts to the lean side due to the effect of correcting the air-fuel ratio of the cylinders other than the abnormal cylinders to the lean side. Since the air-fuel ratio feedback control functions so that the cylinder is uniformly corrected to the rich side, as a result, the air-fuel ratios of all the cylinders are controlled in the vicinity of the target air-fuel ratio.
複数の気筒のうち、特定気筒に着目した場合、空燃比のずれは、必ずしも、リーン側にずれるものではないが、リッチ側にずれた場合も、空燃比フィードバック制御により、その他の気筒がリーン側にずれるので、いずれにしても異常気筒は発生する。さらに、本制御を頻繁に実施することで、もっともリーンになった気筒のみを異常気筒として逐次補正できるので、その結果、常時、全気筒の空燃比のばらつきを抑制することができる。 When focusing on a specific cylinder among the plurality of cylinders, the air-fuel ratio shift does not necessarily shift to the lean side. However, even if the air-fuel ratio shifts to the rich side, the other cylinders are moved to the lean side by air-fuel ratio feedback control. In any case, an abnormal cylinder is generated anyway. Further, by frequently performing this control, only the leanest cylinder can be sequentially corrected as an abnormal cylinder, and as a result, variations in the air-fuel ratio of all cylinders can be constantly suppressed.
そして、異常気筒以外の他の気筒の空燃比を燃料量減量補正によりリーン側に補正した後、異常気筒の角加速度もしくはその平均値と、異常気筒以外の他の気筒の角加速度もしくはその平均値とを比較し、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より大きいときは、異常気筒の空気量が、異常気筒以外の他の気筒の空気量より多いと判断する。すなわち、異常気筒以外の他の気筒を燃料量減量により補正した後、異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値とをあらためて比較する。 Then, after correcting the air-fuel ratio of the cylinders other than the abnormal cylinder to the lean side by the fuel amount reduction correction, the angular acceleration of the abnormal cylinder or the average value thereof, and the angular acceleration of the other cylinders other than the abnormal cylinder or the average value thereof If the angular acceleration of the abnormal cylinder or its average value is greater than the angular acceleration of other cylinders other than the abnormal cylinder or its average value, the amount of air in the abnormal cylinder is Judged to be more than the amount. That is, after correcting cylinders other than the abnormal cylinder by reducing the fuel amount, the angular acceleration of the abnormal cylinder or its average value is compared with the angular acceleration of the other cylinders other than the abnormal cylinder or its average value.
このとき、異常気筒のリーン化の原因が意図せぬ空気量増量であった場合、異常気筒以外の他の気筒に対して燃料量減量補正を実施することで、空燃比フィードバック制御により全気筒一律に燃料増量(リッチ側に)補正する機能が働き、異常気筒の空燃比もリッチ側に補正され適正化(目標空燃比近傍に収束)される。 At this time, if the cause of the leaning of the abnormal cylinder is an unintended increase in the air amount, the correction of the fuel amount is reduced for the other cylinders other than the abnormal cylinder so that all cylinders are uniformly controlled by the air-fuel ratio feedback control. Thus, the function of correcting the fuel increase (to the rich side) works, and the air-fuel ratio of the abnormal cylinder is also corrected to the rich side and optimized (convergence is converged to the vicinity of the target air-fuel ratio).
しかし、その結果、異常気筒は、異常気筒以外の他の気筒と比較して、供給燃料量が多くなるため、発生トルクは大きくなる。すなわち、異常気筒の燃焼時に発生する角加速度は、異常気筒以外の他の気筒の燃焼時に発生する角加速度と比較して大きくなる。 However, as a result, the abnormal cylinder has a larger amount of supplied fuel than the other cylinders than the abnormal cylinder, and therefore the generated torque is increased. That is, the angular acceleration generated when the abnormal cylinder burns is larger than the angular acceleration generated when the other cylinders other than the abnormal cylinder burn.
したがって、異常気筒の角加速度もしくはその平均値が、異常気筒以外の他の気筒の角加速度もしくはその平均値より大きいときは、異常気筒の空気量が、異常気筒以外の他の気筒の空気量より多かったと判断することができる。 Therefore, when the angular acceleration of the abnormal cylinder or the average value thereof is larger than the angular acceleration of the other cylinders other than the abnormal cylinder or the average value thereof, the air amount of the abnormal cylinder is larger than the air amount of the other cylinders other than the abnormal cylinder. It can be judged that there were many.
そして、空気量が多いと判断された異常気筒の空気量および燃料量を少なくなるように補正する。すなわち、空気量が多いと判定された異常気筒の発生トルクと、異常気筒以外の他の気筒の発生トルクとの差をなくすために、その原因である異常気筒の空気量を少なくなるように補正する。 And it correct | amends so that the air quantity and fuel quantity of an abnormal cylinder judged that there are many air quantities may decrease. In other words, in order to eliminate the difference between the generated torque of the abnormal cylinder determined to have a large amount of air and the generated torque of other cylinders other than the abnormal cylinder, correction is performed so that the amount of air in the abnormal cylinder that is the cause is reduced. To do.
このとき、異常気筒の空燃比がリッチにならないように、空気量減量分に応じて、燃料量も少なく補正する。その結果、異常気筒と異常気筒以外の他の気筒との間における空燃比およびトルクのばらつきをなくすことができる。 At this time, the fuel amount is also corrected to be small in accordance with the air amount reduction amount so that the air-fuel ratio of the abnormal cylinder does not become rich. As a result, it is possible to eliminate variations in air-fuel ratio and torque between the abnormal cylinder and other cylinders other than the abnormal cylinder.
[実施例6:図34]
実施例6では、異常気筒以外の他の気筒の燃料量を減量補正して異常気筒以外の他の気筒の空燃比をリーン側に補正し、補正後の異常気筒のトルクが異常気筒以外の他の気筒のトルクよりも大きいときは、異常気筒の点火時期をリタード補正することを特徴とする。
[Example 6: FIG. 34]
In the sixth embodiment, the fuel amount of the cylinders other than the abnormal cylinders is corrected to be decreased, the air-fuel ratio of the cylinders other than the abnormal cylinders is corrected to the lean side, and the torque of the abnormal cylinder after the correction is other than the abnormal cylinders. When the torque is larger than the cylinder torque, the ignition timing of the abnormal cylinder is retarded.
本実施例6では、上述の実施例1に対して気筒別燃料噴射量補正値演算部165の仕様が異なるだけであり、他の手段は略同様であるので、以下においては、仕様が異なる演算部について重点的に説明する。
In the sixth embodiment, only the specification of the cylinder specific fuel injection amount correction
実施例6では、下記プロセスの制御を実施する。
・ステージ1(f_stage=1)
(1)気筒別に角加速度の分散値を演算し、もっとも角加速度の分散値が大きい気筒(もっともリーンな気筒:リーン気筒)を異常気筒として検出する(Cyl_Mal)。気筒番号Cyl_Malの気筒、すなわち異常気筒の角加速度の分散値をV_omega_Cyl_Malとする。
(2)V_omega_Cyl_Malに基づいて、もっともリーンな気筒(異常気筒)以外の気筒に対して、燃料噴射量を減量補正する(F_Hos_n)。
In Example 6, the following processes are controlled.
・ Stage 1 (f_stage = 1)
(1) The angular acceleration dispersion value is calculated for each cylinder, and the cylinder having the largest angular acceleration dispersion value (the leanest cylinder: the lean cylinder) is detected as an abnormal cylinder (Cyl_Mal). The dispersion value of the angular acceleration of the cylinder number Cyl_Mal, that is, the abnormal cylinder is V_omega_Cyl_Mal.
(2) Based on V_omega_Cyl_Mal, the fuel injection amount is corrected to decrease for the cylinders other than the leanest cylinder (abnormal cylinder) (F_Hos_n).
・ステージ2(f_stage=2)
(1)ステージ1の終了後に実施。
(2)気筒別に角加速度の平均値を演算し、もっとも角加速度の平均値が大きい気筒の気筒番号がCyl_Mal(異常気筒の気筒番号)と一致したとき、当該気筒(異常気筒)の角加速度の平均値をM_omega_Cyl_Mal(異常気筒の角加速度の平均値)とする。
(3)M_omega_Cyl_Malに基づいて、当該気筒(異常気筒)の点火時期をリタード側に補正する(ADV_Hos_n)。
以下に、本実施例6における気筒別燃料噴射量補正値演算部165の詳細を述べる。
・ Stage 2 (f_stage = 2)
(1) Implemented after
(2) Calculate the average value of angular acceleration for each cylinder, and when the cylinder number of the cylinder with the largest average value of angular acceleration matches Cyl_Mal (cylinder number of abnormal cylinder), the angular acceleration of the cylinder (abnormal cylinder) Let the average value be M_omega_Cyl_Mal (average value of angular acceleration of abnormal cylinders).
(3) Based on M_omega_Cyl_Mal, the ignition timing of the cylinder (abnormal cylinder) is corrected to the retard side (ADV_Hos_n).
Details of the cylinder specific fuel injection amount correction
<気筒別燃料噴射量補正値演算部(図34)>
図34は、実施例6における気筒別燃料噴射量補正値演算部の機能を示すブロック線図である。本演算部では、上述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の燃料噴射量補正値(F_Hos_n(nは気筒番号))を演算する。具体的には、図34に示されるように、f_stage=1かつfp_hosei=1のとき、下記の処理を実施する。
・気筒番号が、Cyl_Mal以外の気筒の燃料噴射量補正値のみ、本演算部で演算される値とする。気筒番号がCyl_Malの気筒のF_Hos_nは、1.0とする。
・V_omega_Cyl_Malからテーブル(Tbl_V_omega_F_Hos)351を参照して、補正対象気筒(気筒番号がCyl_Mal以外の気筒)のF_Hos_nとする。
<Cylinder-specific fuel injection amount correction value calculation unit (FIG. 34)>
FIG. 34 is a block diagram illustrating functions of the cylinder specific fuel injection amount correction value calculation unit according to the sixth embodiment. This calculation unit calculates a fuel injection amount correction value (F_Hos_n (n is a cylinder number)) for each cylinder based on the angular acceleration characteristics obtained by the above-described angular acceleration
-Only the fuel injection amount correction values for cylinders other than Cyl_Mal are the values calculated by this calculation unit. F_Hos_n of the cylinder having the cylinder number Cyl_Mal is set to 1.0.
Referring to the table (Tbl_V_omega_F_Hos) 351 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number other than Cyl_Mal) is set to F_Hos_n.
Tbl_V_omega_F_Hosの設定値は、角加速度の分散値と空燃比の関係を表すもので、実機試験の結果から決めるのが良い。 The set value of Tbl_V_omega_F_Hos represents the relationship between the dispersion value of angular acceleration and the air-fuel ratio, and should be determined from the results of actual machine tests.
実施例6の制御装置1Bによれば、異常気筒以外の他の気筒の燃料量を減量補正して、異常気筒以外の他の気筒の空燃比をリーン側に補正する。そして、異常気筒以外の他の気筒の空燃比を燃料量減量補正によりリーン側に補正した後、異常気筒の角加速度もしくはその平均値と、異常気筒以外の他の気筒の角加速度もしくはその平均値とを比較し、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より大きいときは、異常気筒の空気量が、異常気筒以外の他の気筒の空気量より多いと判断する。すなわち、異常気筒以外の他の気筒を燃料量減量により補正した後、異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値をあらためて比較する。
According to the
このとき、異常気筒のリーン化の原因が意図せぬ空気量増量であった場合、異常気筒以外の他の気筒に対して燃料量減量補正を実施することで、空燃比フィードバック制御により全気筒一律に燃料増量(リッチ側に)補正する機能が働き、異常気筒の空燃比もリッチ側に補正され適正化(目標空燃比近傍に収束)される。 At this time, if the cause of the leaning of the abnormal cylinder is an unintended increase in the air amount, the correction of the fuel amount is reduced for the other cylinders other than the abnormal cylinder so that all cylinders are uniformly controlled by the air-fuel ratio feedback control. Thus, the function of correcting the fuel increase (to the rich side) works, and the air-fuel ratio of the abnormal cylinder is also corrected to the rich side and optimized (convergence is converged to the vicinity of the target air-fuel ratio).
しかし、その結果、異常気筒は、異常気筒以外の他の気筒と比較して、供給燃料量が多くなるため、発生トルクは大きくなる。すなわち、異常気筒の燃焼時に発生する角加速度は、異常気筒以外の他の気筒の燃焼時に発生する角加速度と比較して大きくなる。 However, as a result, the abnormal cylinder has a larger amount of supplied fuel than the other cylinders than the abnormal cylinder, and therefore the generated torque is increased. That is, the angular acceleration generated when the abnormal cylinder burns is larger than the angular acceleration generated when the other cylinders other than the abnormal cylinder burn.
したがって、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より大きいときは、異常気筒の空気量が、異常気筒以外の他の気筒の空気量より多かったと判断することができる。 Therefore, when the angular acceleration of the abnormal cylinder or its average value is larger than the angular acceleration of other cylinders other than the abnormal cylinder or its average value, the air amount of the abnormal cylinder is larger than the air amount of the other cylinders other than the abnormal cylinder. Can be judged.
そして、空気量が多いと判断された異常気筒の点火時期をリタード側に補正する。すなわち、空気量が多いと判定された異常気筒の発生トルクと、異常気筒以外の他の気筒の発生トルクとの差をなくすために、異常気筒の点火時期をリタード側に補正する。その結果、異常気筒と異常気筒以外の他の気筒との間における空燃比およびトルクのばらつきをなくすことができる。 Then, the ignition timing of the abnormal cylinder determined to have a large amount of air is corrected to the retard side. That is, the ignition timing of the abnormal cylinder is corrected to the retard side in order to eliminate the difference between the generated torque of the abnormal cylinder determined to have a large amount of air and the generated torque of other cylinders other than the abnormal cylinder. As a result, it is possible to eliminate variations in air-fuel ratio and torque between the abnormal cylinder and other cylinders other than the abnormal cylinder.
[実施例7:図35]
実施例7では、異常気筒以外の他の気筒の空気量を増量補正して異常気筒以外の他の気筒の空燃比をリーン側に補正し、補正後の異常気筒のトルクが異常気筒以外の他の気筒のトルクよりも小さいときは、異常気筒の燃料と空気量を増量補正することを特徴とする。
[Example 7: FIG. 35]
In the seventh embodiment, the air amount of other cylinders other than the abnormal cylinders is corrected to be increased to correct the air-fuel ratio of the cylinders other than the abnormal cylinders to the lean side, and the torque of the corrected abnormal cylinders other than the abnormal cylinders is corrected. When the torque is smaller than the torque of the cylinder, the amount of fuel and air in the abnormal cylinder is increased and corrected.
本実施例7では、上述の実施例3に対して、気筒別空気量補正値演算部166の仕様が異なるだけであり、他の手段は略同様であるので、以下においては、仕様が異なる演算部について重点的に説明する。
The seventh embodiment is different from the third embodiment described above only in the specification of the cylinder-by-cylinder air amount correction
実施例7では、下記プロセスの制御を実施する。
・ステージ1(f_stage=1)
(1)気筒別に角加速度の分散値を演算し、もっとも角加速度の分散値が大きい気筒(もっともリーンな気筒:リーン気筒)を異常気筒として検出する(Cyl_Mal)。気筒番号Cyl_Malの気筒、すなわち異常気筒の角加速度の分散値をV_omega_Cyl_Malとする。
(2)V_omega_Cyl_Malに基づいて、もっともリーンな気筒(異常気筒)以外の気筒に対して、空気量を増量補正する(IVO_Hos_n,IVC_Hos_n)。
In Example 7, the following processes are controlled.
・ Stage 1 (f_stage = 1)
(1) The angular acceleration dispersion value is calculated for each cylinder, and the cylinder having the largest angular acceleration dispersion value (the leanest cylinder: the lean cylinder) is detected as an abnormal cylinder (Cyl_Mal). The dispersion value of the angular acceleration of the cylinder number Cyl_Mal, that is, the abnormal cylinder is V_omega_Cyl_Mal.
(2) Based on V_omega_Cyl_Mal, the amount of air is corrected to be increased (IVO_Hos_n, IVC_Hos_n) for cylinders other than the leanest cylinder (abnormal cylinder).
・ステージ2(f_stage=2)
(1)ステージ1の終了後に実施。
(2)気筒別に角加速度の平均値を演算し、もっとも角加速度の平均値が小さい気筒番号が異常気筒の気筒番号Cyl_Malと一致したとき、当該気筒(異常気筒)の角加速度の平均値をM_omega_Cyl_Mal(異常気筒の角加速度の平均値)とする。
(3)M_omega_Cyl_Malに基づいて、当該気筒(異常気筒)の燃料噴射量および空気量を増量補正する(F_Hos_n, IVO_Hos_n, IVC_Hos_n)。
以下に、本実施例7における気筒別空気量補正値演算部166の詳細を述べる。
・ Stage 2 (f_stage = 2)
(1) Implemented after
(2) The average value of angular acceleration is calculated for each cylinder, and when the cylinder number with the smallest average value of angular acceleration matches the cylinder number Cyl_Mal of the abnormal cylinder, the average value of angular acceleration of the cylinder (abnormal cylinder) is calculated as M_omega_Cyl_Mal (Average value of angular acceleration of abnormal cylinder).
(3) Based on M_omega_Cyl_Mal, the fuel injection amount and air amount of the cylinder (abnormal cylinder) are increased and corrected (F_Hos_n, IVO_Hos_n, IVC_Hos_n).
Details of the cylinder-by-cylinder air amount correction
<気筒別空気量補正値演算部(図35)>
図35は、実施例7における気筒別空気量補正値演算部の機能を示すブロック線図である。本演算部では、上述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の空気量補正値(IVO_Hos_n, IVC_Hos(nは気筒番号))を演算する。具体的には、図35に示されるように、fp_hosei=1のとき、下記の処理を実施する。
<Air amount correction value calculation unit for each cylinder (FIG. 35)>
FIG. 35 is a block diagram illustrating functions of the cylinder-by-cylinder air amount correction value calculation unit according to the seventh embodiment. This calculation unit calculates the air amount correction values (IVO_Hos_n, IVC_Hos (n is a cylinder number)) for each cylinder based on the angular acceleration characteristics obtained by the above-described angular acceleration
・ステージ1のとき(f_stage=1のとき)>
(1)気筒番号が、Cyl_Mal以外の気筒の空気量補正値のみ、本演算部で演算される値とする。気筒番号がCyl_Malの気筒のIVO_Hos_nおよびIVC_Hos_nは、0とする。
(2)V_omega_Cyl_Malからテーブル(Tbl_V_omega_IVO)361を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVO_Hos_nとする。
(3)V_omega_Cyl_Malからテーブル(Tbl_V_omega_IVC)363を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVC_Hos_nとする。
・ Stage 1 (when f_stage = 1)>
(1) Only the air amount correction value of cylinders other than the cylinder number Cyl_Mal is a value calculated by this calculation unit. IVO_Hos_n and IVC_Hos_n of the cylinder having the cylinder number Cyl_Mal are set to 0.
(2) With reference to the table (Tbl_V_omega_IVO) 361 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to IVO_Hos_n.
(3) With reference to the table (Tbl_V_omega_IVC) 363 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set as IVC_Hos_n.
・ステージ2のとき(f_stage=2のとき)>
(1)気筒番号が、Cyl_Malの空気量補正値のみ、本演算部で演算される値とする。それ以外の気筒のIVO_Hos_nおよびIVC_Hos_nは、0とする。
(2)M_omega_Cyl_Malからテーブル(Tbl_M_omega_IVO)362を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVO_Hos_nとする。
(3)M_omega_Cyl_Malからテーブル(Tbl_M_omega_IVC)364を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVC_Hos_nとする。
・ When stage 2 (when f_stage = 2)>
(1) Only the air amount correction value with a cylinder number of Cyl_Mal is set to a value calculated by this calculation unit. IVO_Hos_n and IVC_Hos_n of other cylinders are set to 0.
(2) With reference to the table (Tbl_M_omega_IVO) 362 from M_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set as IVO_Hos_n.
(3) With reference to the table (Tbl_M_omega_IVC) 364 from M_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to IVC_Hos_n.
Tbl_V_omega_IVO_HosおよびTbl_V_omega_IVC_Hosの設定値は、角加速度の角加速度の分散値と空燃比の関係を表すもので、実機試験の結果から決めるのが良い。Tbl_M_omega_IVO_HosおよびTbl_M_omega_IVC_Hosの設定値は、角加速度の角加速度の平均値とトルク(充填効率)の関係を表すもので、実機試験の結果から決めるのが良い。すなわち、気筒番号Cyl_Malの気筒の角加速度平均値がその他の気筒の角加速度平均値よりも小さいとき、本演算部による補正を実施する。 The set values of Tbl_V_omega_IVO_Hos and Tbl_V_omega_IVC_Hos represent the relationship between the angular acceleration dispersion value and the air-fuel ratio, and should be determined from the results of actual machine tests. The set values of Tbl_M_omega_IVO_Hos and Tbl_M_omega_IVC_Hos represent the relationship between the average value of angular acceleration of angular acceleration and torque (filling efficiency), and should be determined from the results of actual machine tests. That is, when the average angular acceleration value of the cylinder with the cylinder number Cyl_Mal is smaller than the average angular acceleration values of the other cylinders, the correction by this calculation unit is performed.
角加速度の大きさは、当該気筒(異常気筒)のトルクの大きさと相関があるので、気筒番号Cyl_Malの気筒(異常気筒)のトルクが、その他の気筒(異常気筒以外の他の気筒)と同じになるように当該気筒(異常気筒)の空気量(充填効率)を多くするものである。なお、空気量のみ多くすると、当該気筒(異常気筒)はリーンになるので、前述の気筒別燃料量補正値演算部272で、当該気筒(異常気筒)の燃料量も併せて多くする。 Since the magnitude of the angular acceleration has a correlation with the magnitude of the torque of the cylinder (abnormal cylinder), the torque of the cylinder (Cyl_Mal) with the cylinder number Cyl_Mal is the same as other cylinders (other cylinders other than the abnormal cylinder). Thus, the air amount (filling efficiency) of the cylinder (abnormal cylinder) is increased. Note that if only the air amount is increased, the cylinder (abnormal cylinder) becomes lean, and therefore the fuel amount of the cylinder (abnormal cylinder) is also increased in the cylinder-specific fuel amount correction value calculation unit 272 described above.
実施例7の制御装置1Cによれば、異常気筒以外の他の気筒の空気量を増量補正して、異常気筒以外の他の気筒の空燃比をリーン側に補正する。そして、異常気筒以外の他の気筒の空燃比を空気量増量補正によりリーン側に補正した後、異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値とを比較し、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より小さいときは、異常気筒の燃料量が、異常気筒以外の他の気筒の燃料量より少ないと判断する。すなわち、異常気筒以外の他の気筒を空気量増量により補正した後、異常気筒の角加速度もしくはその平均値と、異常気筒以外の他の気筒の角加速度もしくはその平均値をあらためて比較する。 According to the control device 1C of the seventh embodiment, the air amount of the cylinders other than the abnormal cylinders is increased and corrected, and the air-fuel ratio of the cylinders other than the abnormal cylinders is corrected to the lean side. Then, after correcting the air-fuel ratio of the cylinders other than the abnormal cylinder to the lean side by the air amount increase correction, the angular acceleration of the abnormal cylinder or its average value and the angular acceleration of the other cylinders other than the abnormal cylinder or the average value thereof When the angular acceleration of the abnormal cylinder or the average value thereof is smaller than the angular acceleration of the other cylinders other than the abnormal cylinder or the average value thereof, the fuel amount of the abnormal cylinder is the fuel amount of the other cylinders other than the abnormal cylinder. Judge that it is less. That is, after correcting cylinders other than the abnormal cylinder by increasing the air amount, the angular acceleration of the abnormal cylinder or its average value is again compared with the angular acceleration of other cylinders other than the abnormal cylinder or its average value.
このとき、異常気筒のリーン化の原因が意図せぬ燃料量減量であった場合、異常気筒以外の他の気筒に対して空気量増量補正を実施することで、空燃比フィードバック制御により全気筒一律に燃料増量(リッチ側に)補正する機能が働き、異常気筒の空燃比もリッチ側に補正され適正化(目標空燃比近傍に収束)される。 At this time, if the cause of leaning of the abnormal cylinder is an unintentional fuel amount decrease, the air amount increase correction is performed on the cylinders other than the abnormal cylinder so that all cylinders are uniformly controlled by air-fuel ratio feedback control. Thus, the function of correcting the fuel increase (to the rich side) works, and the air-fuel ratio of the abnormal cylinder is also corrected to the rich side and optimized (convergence is converged to the vicinity of the target air-fuel ratio).
しかし、その結果、異常気筒は、異常気筒以外の他の気筒と比較すると、依然として、供給燃料量が少ないため、発生トルクは小さくなる。すなわち、異常気筒の燃焼時に発生する角加速度は、異常気筒以外の他の気筒の燃焼時に発生する角加速度と比較して小さくなる。 However, as a result, the abnormal cylinder still has a small amount of supplied fuel compared to other cylinders other than the abnormal cylinder, and thus the generated torque is small. That is, the angular acceleration generated when the abnormal cylinder burns is smaller than the angular acceleration generated when the other cylinders other than the abnormal cylinder burn.
したがって、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より小さいときは、異常気筒の燃料量が、異常気筒以外の他の気筒の燃料量より少なかったと判断することができる。 Therefore, when the angular acceleration of the abnormal cylinder or its average value is smaller than the angular acceleration of other cylinders other than the abnormal cylinder or its average value, the fuel amount of the abnormal cylinder is less than the fuel amount of the other cylinders other than the abnormal cylinder. Can be judged.
そして、燃料量が少ないと判断された異常気筒の空気量および燃料量を多くなるように補正する。すなわち、燃料量が少ないと判定された異常気筒の発生トルクと、異常気筒以外の他の気筒の発生トルクとの差をなくすために、その原因である異常気筒の燃料量を多くなるように補正する。このとき、異常気筒の空燃比がリッチにならないように、燃料量増量分に応じて、空気量も多くするものである。その結果、異常気筒と異常気筒以外の他の気筒との気筒の間における空燃比およびトルクのばらつきをなくすことができる。 And it correct | amends so that the air quantity and fuel quantity of an abnormal cylinder judged that there are few fuel quantities may be increased. In other words, in order to eliminate the difference between the generated torque of the abnormal cylinder determined to have a small amount of fuel and the generated torque of other cylinders other than the abnormal cylinder, the correction is made to increase the fuel amount of the abnormal cylinder that is the cause. To do. At this time, the air amount is increased in accordance with the fuel amount increase so that the air-fuel ratio of the abnormal cylinder does not become rich. As a result, it is possible to eliminate variations in the air-fuel ratio and torque between the abnormal cylinder and the cylinders other than the abnormal cylinder.
[実施例8:図36]
実施例8では、異常気筒以外の他の気筒の空気量を増量補正して異常気筒以外の他の気筒の空燃比をリーン側に補正し、補正後の異常気筒のトルクが異常気筒以外の他の気筒のトルクよりも小さいときは、異常気筒の点火時期を進角補正することを特徴とする。
[Example 8: FIG. 36]
In the eighth embodiment, the air amount of other cylinders other than the abnormal cylinders is corrected to be increased, and the air-fuel ratio of the other cylinders other than the abnormal cylinders is corrected to the lean side. When the torque is smaller than the cylinder torque, the ignition timing of the abnormal cylinder is corrected to advance.
本実施例8では、上述の実施例4に対して気筒別空気量補正値演算部166の仕様が
異なるだけであり、他の手段は略同様であるので、以下においては、仕様が異なる演算部について重点的に説明する。
In the eighth embodiment, only the specification of the cylinder-by-cylinder air amount correction
実施例8では、下記プロセスの制御を実施する。
・ステージ1(f_stage=1)
(1)気筒別に角加速度の分散値を演算し、もっとも角加速度の分散値が大きい気筒(もっともリーンな気筒:リーン気筒)を異常気筒として検出する(Cyl_Mal)。気筒番号Cyl_Malの気筒、すなわち異常気筒の角加速度の分散値をV_omega_Cyl_Malとする。
(2)V_omega_Cyl_Malに基づいて、もっともリーンな気筒(異常気筒)以外の気筒に対して、空気量を増量補正する(IVO_Hos_n,IVC_Hos_n)。
In Example 8, the following process is controlled.
・ Stage 1 (f_stage = 1)
(1) The angular acceleration dispersion value is calculated for each cylinder, and the cylinder having the largest angular acceleration dispersion value (the leanest cylinder: the lean cylinder) is detected as an abnormal cylinder (Cyl_Mal). The dispersion value of the angular acceleration of the cylinder number Cyl_Mal, that is, the abnormal cylinder is V_omega_Cyl_Mal.
(2) Based on V_omega_Cyl_Mal, the amount of air is corrected to be increased (IVO_Hos_n, IVC_Hos_n) for cylinders other than the leanest cylinder (abnormal cylinder).
・ステージ2(f_stage=2)
(1)ステージ1の終了後に実施。
(2)気筒別に角加速度の平均値を演算し、もっとも角加速度の平均値が小さい気筒番号が異常気筒の気筒番号Cyl_Malと一致したとき、当該気筒(異常気筒)の角加速度の平均値をM_omega_Cyl_Mal(異常気筒の角加速度の平均値)とする。
(3)M_omega_Cyl_Malに基づいて、当該気筒(異常気筒)の点火時期を進角側に補正する(ADV_Hos_n)。
以下に、本実施例8における気筒別空気量補正値演算部166の詳細を述べる。
・ Stage 2 (f_stage = 2)
(1) Implemented after
(2) The average value of angular acceleration is calculated for each cylinder, and when the cylinder number with the smallest average value of angular acceleration matches the cylinder number Cyl_Mal of the abnormal cylinder, the average value of angular acceleration of the cylinder (abnormal cylinder) is calculated as M_omega_Cyl_Mal (Average value of angular acceleration of abnormal cylinder).
(3) Based on M_omega_Cyl_Mal, the ignition timing of the cylinder (abnormal cylinder) is corrected to the advance side (ADV_Hos_n).
Details of the cylinder-by-cylinder air amount correction
<気筒別空気量補正値演算部(図36)>
図36は、実施例8における気筒別空気量補正値演算部166の機能を示すブロック線図である。本演算部では、上述の気筒別角加速度特性演算部164で求めた角加速度特性に基づいて、気筒別の空気量補正値(IVO_Hos_n, IVC_Hos(nは気筒番号))を演算する。具体的には、図36に示されるように、f_stage=1かつfp_hosei=1のとき、下記の処理を実施する。
(1)気筒番号が、Cyl_Mal以外の気筒の空気量補正値のみ、本演算部で演算される値とする。気筒番号が、Cyl_Malの気筒のIVO_Hos_nおよびIVC_Hos_nは、0とする。
(2)V_omega_Cyl_Malからテーブル(Tbl_V_omega_IVO)371を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVO_Hos_nとする。
(3)V_omega_Cyl_Malからテーブル(Tbl_V_omega_IVC)372を参照して、補正対象気筒(気筒番号がCyl_Mal)のIVC_Hos_nとする。
<Air amount correction value calculation unit for each cylinder (FIG. 36)>
FIG. 36 is a block diagram illustrating the function of the cylinder-by-cylinder air amount correction
(1) Only the air amount correction value of cylinders other than the cylinder number Cyl_Mal is a value calculated by this calculation unit. IVO_Hos_n and IVC_Hos_n of a cylinder having a cylinder number of Cyl_Mal are set to 0.
(2) With reference to the table (Tbl_V_omega_IVO) 371 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to IVO_Hos_n.
(3) With reference to the table (Tbl_V_omega_IVC) 372 from V_omega_Cyl_Mal, the correction target cylinder (cylinder number is Cyl_Mal) is set to IVC_Hos_n.
Tbl_V_omega_IVO_HosおよびTbl_V_omega_IVC_Hosの設定値は、角加速度の角加速度の分散値と空燃比の関係を表すもので、実機試験の結果から決めるのが良い。 The set values of Tbl_V_omega_IVO_Hos and Tbl_V_omega_IVC_Hos represent the relationship between the angular acceleration dispersion value and the air-fuel ratio, and should be determined from the results of actual machine tests.
実施例8の制御装置1Dによれば、異常気筒以外の他の気筒の空気量を増量補正して、異常気筒以外の他の気筒の空燃比をリーン側に補正する。そして、異常気筒以外の他の気筒の空燃比を空気量増量補正によりリーン側に補正した後、異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値を比較し、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より小さいときは、異常気筒の燃料量が、異常気筒以外の他の気筒の燃料量より少ないと判断する。すなわち、異常気筒以外の他の気筒を空気量増量により補正した後、異常気筒の角加速度もしくはその平均値と異常気筒以外の他の気筒の角加速度もしくはその平均値をあらためて比較する。
According to the
このとき、異常気筒のリーン化の原因が意図せぬ燃料量減量であった場合、異常気筒以外の他の気筒に対して、空気量増量補正を実施することで、空燃比フィードバック制御により全気筒一律に燃料増量(リッチ側に)補正する機能が働き、異常気筒の空燃比もリッチ側に補正され適正化(目標空燃比近傍に収束)される。 At this time, if the cause of leaning of the abnormal cylinder is an unintentional fuel amount decrease, all the cylinders are controlled by air-fuel ratio feedback control by performing air amount increase correction for other cylinders other than the abnormal cylinder. A function to uniformly increase the fuel amount (to the rich side) works, and the air-fuel ratio of the abnormal cylinder is also corrected to the rich side and optimized (convergence is made close to the target air-fuel ratio).
しかし、その結果、異常気筒は、異常気筒以外の他の気筒と比較すると、依然として、供給燃料量が少ないため、発生トルクは小さくなる。すなわち、異常気筒の燃焼時に発生する角加速度は、異常気筒以外の他の気筒の燃焼時に発生する角加速度と比較して小さくなる。 However, as a result, the abnormal cylinder still has a small amount of supplied fuel compared to other cylinders other than the abnormal cylinder, and thus the generated torque is small. That is, the angular acceleration generated when the abnormal cylinder burns is smaller than the angular acceleration generated when the other cylinders other than the abnormal cylinder burn.
したがって、異常気筒の角加速度もしくはその平均値が異常気筒以外の他の気筒の角加速度もしくはその平均値より小さいときは、異常気筒の燃料量が、異常気筒以外の他の気筒の燃料量より少なかったと判断することができる。 Therefore, when the angular acceleration of the abnormal cylinder or its average value is smaller than the angular acceleration of other cylinders other than the abnormal cylinder or its average value, the fuel amount of the abnormal cylinder is less than the fuel amount of the other cylinders other than the abnormal cylinder. Can be judged.
そして、燃料量が少ないと判断された異常気筒の点火時期を進角側に補正する。すなわち、燃料量が少ないと判定された異常気筒の発生トルクと、異常気筒以外の他の気筒の発生トルクとの差をなくすために、異常気筒の点火時期を進角側に補正する。その結果、異常気筒と異常気筒以外の他の気筒との間における空燃比およびトルクのばらつきをなくすことができる。 Then, the ignition timing of the abnormal cylinder determined to have a small amount of fuel is corrected to the advance side. That is, the ignition timing of the abnormal cylinder is corrected to the advance side in order to eliminate the difference between the generated torque of the abnormal cylinder determined to have a small amount of fuel and the generated torque of other cylinders other than the abnormal cylinder. As a result, it is possible to eliminate variations in air-fuel ratio and torque between the abnormal cylinder and other cylinders other than the abnormal cylinder.
1 エアクリーナ
2 エアフロセンサ
3 電子スロットル
4 吸気管
5 コレクタ
6 アクセル
7 燃料噴射弁
8 点火プラグ
9 エンジン
10 排気管
11 三元触媒
12 A/Fセンサ
13 アクセル開度センサ
14 水温センサ
15 エンジン回転数センサ
16 コントロールユニット
17 スロットル開度センサ
18 排気還流管
19 排気還流量調節バルブ
20 触媒下流O2センサ
21 コントロールユニット内に実装されるCPU
22 コントロールユニット内に実装されるROM
23 コントロールユニット内に実装されるRAM
24 コントロールユニット内に実装される各種センサの入力回路
25 各種センサ信号の入力、アクチュエータ動作信号を出力するポート
26 点火プラグに適切なタイミングで駆動信号を出力する点火出力回路
27 燃料噴射弁に適切なパルスを出力する燃料噴射弁駆動回路
28 電子スロットル駆動回路
29 吸気温センサ
30 吸気動弁
31 車速センサ
32 吸気動弁駆動回路
DESCRIPTION OF
22 ROM mounted in the control unit
23 RAM mounted in the control unit
24
Claims (6)
前記各気筒に連通する排気管集合部の実空燃比に基づいて空燃比のフィードバック制御を行う手段と、
該空燃比フィードバック制御中でかつ目標空燃比と実空燃比の差が所定値以下のときに、前記複数の気筒の中からクランク軸の角加速度のばらつきがもっとも大きい気筒であるリーン気筒を検出する手段と、
前記リーン気筒の空燃比を燃料量増量補正又は空気量減量補正によりリッチ側に補正し、もしくは、前記リーン気筒以外の気筒の空燃比を燃料量減量補正又は空気量増量補正によりリーン側に補正して、該補正後の前記リーン気筒の角加速度もしくはその平均値と前記リーン気筒以外の気筒の角加速度もしくはその平均値とを比較し、該比較結果に基づいて前記リーン気筒のリーン化の原因を特定し、該原因に応じて前記リーン気筒の空気量と燃料量の少なくとも一方を補正する手段と、
を備えたことを特徴とするエンジンの制御装置。 An engine control device having a plurality of cylinders,
Means for performing feedback control of the air-fuel ratio based on the actual air-fuel ratio of the exhaust pipe collecting portion communicating with each cylinder;
When the air-fuel ratio feedback control is being performed and the difference between the target air-fuel ratio and the actual air-fuel ratio is equal to or less than a predetermined value, the lean cylinder that is the cylinder with the largest variation in the angular acceleration of the crankshaft is detected from the plurality of cylinders. Means,
The air-fuel ratio of the lean cylinder is corrected to the rich side by fuel amount increase correction or air amount decrease correction, or the air-fuel ratio of cylinders other than the lean cylinder is corrected to the lean side by fuel amount decrease correction or air amount increase correction. Then, the corrected angular acceleration of the lean cylinder or the average value thereof is compared with the angular acceleration of the cylinders other than the lean cylinder or the average value thereof, and the cause of leaning of the lean cylinder is determined based on the comparison result. Identifying and correcting at least one of an air amount and a fuel amount of the lean cylinder according to the cause;
An engine control device comprising:
前記リーン気筒の空燃比を燃料量増量補正によりリッチ側に補正した後に、前記リーン気筒の角加速度もしくはその平均値と、前記リーン気筒以外の気筒の角加速度もしくはその平均値とを比較する手段と、
該比較の結果、前記リーン気筒の角加速度もしくはその平均値が前記リーン気筒以外の気筒の角加速度もしくはその平均値より大きい場合に、前記リーン気筒の空気量が前記リーン気筒以外の気筒の空気量よりも多いと判断して、前記リーン気筒の空気量及び燃料量をそれぞれ減量補正する手段と、
を備えたことを特徴とする請求項1に記載のエンジンの制御装置。 Means for correcting the air-fuel ratio of the lean cylinder to a rich side by fuel amount increase correction;
Means for comparing the angular acceleration of the lean cylinder or its average value with the angular acceleration of the cylinders other than the lean cylinder or the average value thereof after correcting the air-fuel ratio of the lean cylinder to the rich side by correcting the fuel amount; ,
As a result of the comparison, when the angular acceleration of the lean cylinder or the average value thereof is larger than the angular acceleration of the cylinders other than the lean cylinder or the average value thereof, the air quantity of the lean cylinder is the air quantity of the cylinders other than the lean cylinder. Means for reducing the air amount and fuel amount of the lean cylinder, respectively,
The engine control device according to claim 1, further comprising:
前記リーン気筒の空燃比を燃料量増量補正によりリッチ側に補正した後に、前記リーン気筒の角加速度もしくはその平均値と、前記リーン気筒以外の気筒の角加速度もしくはその平均値とを比較する手段と、
該比較の結果、前記リーン気筒の角加速度もしくはその平均値が前記リーン気筒以外の気筒の角加速度もしくはその平均値より小さい場合に、前記リーン気筒の燃料量が前記リーン気筒以外の気筒の燃料量よりも少ないと判断して、前記リーン気筒の燃料量を増量補正する手段と、
を備えたことを特徴とする請求項1に記載のエンジンの制御装置。 Means for correcting the air-fuel ratio of the lean cylinder to a rich side by fuel amount increase correction;
Means for comparing the angular acceleration of the lean cylinder or its average value with the angular acceleration of the cylinders other than the lean cylinder or the average value thereof after correcting the air-fuel ratio of the lean cylinder to the rich side by correcting the fuel amount; ,
As a result of the comparison, when the angular acceleration of the lean cylinder or its average value is smaller than the angular acceleration of the cylinders other than the lean cylinder or its average value, the fuel quantity of the lean cylinder is the fuel quantity of the cylinders other than the lean cylinder. Means for correcting the lean cylinder fuel amount to be increased,
The engine control device according to claim 1, further comprising:
前記リーン気筒の空燃比を空気量減量補正によりリッチ側に補正した後に、前記リーン気筒の角加速度もしくはその平均値と、前記リーン気筒以外の気筒の角加速度もしくはその平均値とを比較する手段と、
該比較の結果、前記リーン気筒の角加速度もしくはその平均値が前記リーン気筒以外の気筒の角加速度もしくはその平均値より小さい場合に、前記リーン気筒の燃料量が前記リーン気筒以外の気筒の燃料量よりも少ないと判断して、前記リーン気筒の空気量及び燃料量をそれぞれ増量補正する手段と、
を備えたことを特徴とする請求項1に記載のエンジンの制御装置。 Means for correcting the air-fuel ratio of the lean cylinder to a rich side by air amount reduction correction;
Means for comparing the angular acceleration of the lean cylinder or its average value with the angular acceleration of the cylinders other than the lean cylinder or the average value thereof after correcting the air-fuel ratio of the lean cylinder to the rich side by the air amount reduction correction; ,
As a result of the comparison, when the angular acceleration of the lean cylinder or its average value is smaller than the angular acceleration of the cylinders other than the lean cylinder or its average value, the fuel quantity of the lean cylinder is the fuel quantity of the cylinders other than the lean cylinder. Means for increasing the air quantity and fuel quantity of the lean cylinder, respectively,
The engine control device according to claim 1, further comprising:
前記リーン気筒以外の気筒の空燃比を燃料量減量補正によりリーン側に補正した後に、前記リーン気筒の角加速度もしくはその平均値と、前記リーン気筒以外の気筒の角加速度もしくはその平均値とを比較する手段と、
該比較の結果、前記リーン気筒の角加速度もしくはその平均値が前記リーン気筒以外の気筒の角加速度もしくはその平均値より大きい場合に、前記リーン気筒の空気量が前記リーン気筒以外の気筒の空気量よりも多いと判断して、前記前記リーン気筒の空気量及び燃料量をそれぞれ減量補正する手段と、
を備えたことを特徴とする請求項1に記載のエンジンの制御装置。 Means for correcting the air-fuel ratio of cylinders other than the lean cylinder to the lean side by fuel amount reduction correction;
After correcting the air-fuel ratio of the cylinders other than the lean cylinder to the lean side by correcting the fuel amount reduction, the angular acceleration of the lean cylinder or its average value is compared with the angular acceleration of the cylinder other than the lean cylinder or the average value thereof. Means to
As a result of the comparison, when the angular acceleration of the lean cylinder or the average value thereof is larger than the angular acceleration of the cylinders other than the lean cylinder or the average value thereof, the air quantity of the lean cylinder is the air quantity of the cylinders other than the lean cylinder. Means for reducing the amount of air and the amount of fuel in the lean cylinder, respectively,
The engine control device according to claim 1, further comprising:
前記リーン気筒以外の気筒の空燃比を空気量増量補正によりリーン側に補正した後に、前記リーン気筒の角加速度もしくはその平均値と、前記リーン気筒以外の気筒の角加速度もしくはその平均値とを比較する手段と、
該比較の結果、前記リーン気筒の角加速度もしくはその平均値が前記リーン気筒以外の気筒の角加速度もしくはその平均値より小さい場合に、前記リーン気筒の燃料量が前記リーン気筒以外の気筒の燃料量よりも少ないと判断して、前記リーン気筒の空気量及び燃料量を増量補正する手段と、
を備えたことを特徴とする請求項1に記載のエンジンの制御装置。 Means for correcting the air-fuel ratio of cylinders other than the lean cylinder to the lean side by air amount increase correction;
After correcting the air-fuel ratio of the cylinders other than the lean cylinder to the lean side by increasing the air amount, the angular acceleration of the lean cylinder or its average value is compared with the angular acceleration of the cylinder other than the lean cylinder or its average value. Means to
As a result of the comparison, when the angular acceleration of the lean cylinder or its average value is smaller than the angular acceleration of the cylinders other than the lean cylinder or its average value, the fuel quantity of the lean cylinder is the fuel quantity of the cylinders other than the lean cylinder. Means for correcting the amount of air and fuel in the lean cylinder to be increased,
The engine control device according to claim 1, further comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012128290A JP5260770B2 (en) | 2012-06-05 | 2012-06-05 | Engine control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012128290A JP5260770B2 (en) | 2012-06-05 | 2012-06-05 | Engine control device |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009175217A Division JP2011027059A (en) | 2009-07-28 | 2009-07-28 | Engine cotrol apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012189084A JP2012189084A (en) | 2012-10-04 |
| JP5260770B2 true JP5260770B2 (en) | 2013-08-14 |
Family
ID=47082499
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012128290A Expired - Fee Related JP5260770B2 (en) | 2012-06-05 | 2012-06-05 | Engine control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5260770B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6203516B2 (en) * | 2013-03-29 | 2017-09-27 | 本田技研工業株式会社 | Engine fuel injection control device |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000205025A (en) * | 1999-01-14 | 2000-07-25 | Fuji Heavy Ind Ltd | Control apparatus for engine |
| JP3968705B2 (en) * | 2002-07-18 | 2007-08-29 | 株式会社デンソー | Control device for internal combustion engine |
-
2012
- 2012-06-05 JP JP2012128290A patent/JP5260770B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012189084A (en) | 2012-10-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011027059A (en) | Engine cotrol apparatus | |
| JP5103459B2 (en) | Engine control device | |
| JP4664395B2 (en) | Engine control device | |
| JP2005194891A (en) | Engine controller | |
| WO2010114127A1 (en) | Control system for internal combustion engine | |
| US8443656B2 (en) | Inter-cylinder air-fuel ratio imbalance abnormality detection device for multi-cylinder internal combustion engine and abnormality detection method therefor | |
| JP5617616B2 (en) | Control device for multi-cylinder internal combustion engine | |
| US9458775B2 (en) | Control apparatus of internal-combustion engine | |
| JP2005133678A (en) | Injection quantity controller of diesel engine | |
| JP5790419B2 (en) | Control device for internal combustion engine | |
| JP2008180225A (en) | Engine control device | |
| JP5260770B2 (en) | Engine control device | |
| JP5240385B2 (en) | Control device for multi-cylinder internal combustion engine | |
| JP5187537B2 (en) | Fuel injection control device for internal combustion engine | |
| JP5461373B2 (en) | Cylinder air-fuel ratio variation abnormality detection device | |
| JP5110119B2 (en) | Control device for multi-cylinder internal combustion engine | |
| JP6468212B2 (en) | Control device for internal combustion engine | |
| JP4792453B2 (en) | Intake air amount detection device | |
| JP4396178B2 (en) | Knock suppression device for internal combustion engine | |
| JP5692130B2 (en) | Internal combustion engine control device | |
| JP2010168931A (en) | Ignition timing control device for spark ignition type internal combustion engine | |
| JP5565269B2 (en) | Exhaust gas sensor signal processing device | |
| JP2017020417A (en) | Control device of internal combustion engine | |
| JP5240384B2 (en) | Control device for multi-cylinder internal combustion engine | |
| JP5610979B2 (en) | Control device for internal combustion engine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120712 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120712 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130416 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130425 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5260770 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |