JP5249541B2 - Propagation path estimation apparatus and reception apparatus - Google Patents
Propagation path estimation apparatus and reception apparatus Download PDFInfo
- Publication number
- JP5249541B2 JP5249541B2 JP2007215835A JP2007215835A JP5249541B2 JP 5249541 B2 JP5249541 B2 JP 5249541B2 JP 2007215835 A JP2007215835 A JP 2007215835A JP 2007215835 A JP2007215835 A JP 2007215835A JP 5249541 B2 JP5249541 B2 JP 5249541B2
- Authority
- JP
- Japan
- Prior art keywords
- propagation path
- value
- frequency domain
- unit
- processing unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Description
本発明は、伝搬路推定装置及び受信装置に関し、例えば、既知の情報であるトレーニングシンボルに続いて未知の情報であるデータシンボルを通信するマルチキャリア通信システムに適用し得るものである。 The present invention relates to a propagation path estimation apparatus and a reception apparatus, and can be applied to, for example, a multicarrier communication system that communicates training symbols that are known information followed by data symbols that are unknown information.
非特許文献1で説明されているように、IEEE802.11n標準規格では、トレーニングシンボル(プリアンブル信号)で伝搬路を推定し、トレーニングシンボルに続くデータシンボルでは、トレーニングシンボルで推定された伝搬路推定値を用いて復調を行うように規定されている。
しかしながら、従来の伝搬路推定方法では、例えば、通信に供している移動機の移動速度が速い場合や、伝搬路の構成要素となっている反射物体(例えば人間など)が移動する場合など、通信中の伝搬路の変動によって振幅及び位相が大きく変動し、トレーニングシンボルを用いた伝搬路推定の精度が低くなって、良好な通信(データ復調)が行えないという問題が生じる。 However, in the conventional propagation path estimation method, for example, when the moving speed of a mobile device used for communication is high, or when a reflective object (such as a human being) that is a component of the propagation path moves, The amplitude and phase fluctuate greatly due to fluctuations in the propagation path, the accuracy of propagation path estimation using the training symbol is lowered, and there is a problem that good communication (data demodulation) cannot be performed.
また、送信機におけるローカル周波数と受信機におけるローカル周波数とに誤差がある場合は、伝搬路において位相変動が生じた場合と同様であり、従来のトレーニングシンボルを用いた伝搬路推定の精度が低くなって、良好な通信(復調)が行えないという問題が生じる。 Also, if there is an error between the local frequency at the transmitter and the local frequency at the receiver, this is the same as when phase fluctuations occur in the propagation path, and the accuracy of propagation path estimation using conventional training symbols is low. Therefore, there arises a problem that good communication (demodulation) cannot be performed.
そのため、伝搬路推定精度を高くし、復調精度を向上させることができる伝搬路推定装置、伝搬路推定方法及び受信装置が望まれている。 Therefore, a propagation path estimation apparatus, a propagation path estimation method, and a reception apparatus that can increase propagation path estimation accuracy and improve demodulation accuracy are desired.
第1の本発明は、既知の情報であるトレーニングシンボルに続いて未知の情報であるデータシンボルを有する信号を受信する受信装置に設けられた伝搬路推定装置において、(1)トレーニングシンボルの受信信号を用いて伝搬路を推定する初期伝搬路推定手段と、(2)推定された伝搬路推定値を適用し、データシンボルの受信信号から伝搬路特性の影響を軽減した後に、閾値との比較により硬判定値を得るビット硬判定部と、その硬判定値をデータシンボルの既知情報とし、伝搬路の推定をデータシンボルの受信信号期間においても継続する伝搬路追従部とを有する追従手段とを備えたことを特徴とする。 The first of the present invention is a channel estimation apparatus provided subsequent to the training symbol is a known information to the receiving apparatus for receiving a signal having a data symbol is unknown information, (1) the received signal of the training symbol (2) By applying the estimated propagation path estimated value and reducing the influence of the propagation path characteristics from the received signal of the data symbol , by comparing with the threshold value, a hard decision value obtained Ru bit hard decision unit, and a follow-up means with its hard decision value and the known information of the data symbols, the channel tracking unit also continues at the reception signal period of the estimated data symbols of the channel It is characterized by having.
第2の本発明の受信装置は、第1の本発明の伝搬路推定装置を有することを特徴とする。 A receiving apparatus according to a second aspect of the present invention includes the propagation path estimating apparatus according to the first aspect of the present invention.
本発明によれば、未知の情報を伝送しているデータシンボル期間においても、伝搬路を推定することにより、送信機又は受信機が該当する移動機の移動速度が速い場合や、人などの反射物体が移動した場合や、送信機及び受信機間の周波数誤差が大きい場合などでも、より正確な伝搬路推定値が得られ、良好な通信を提供することが可能となる。 According to the present invention, even in a data symbol period in which unknown information is transmitted, by estimating a propagation path, when a moving speed of a corresponding mobile device is high or a reflection of a person or the like Even when the object moves or when the frequency error between the transmitter and the receiver is large, a more accurate propagation path estimation value can be obtained and good communication can be provided.
(A)主たる実施形態
以下、本発明による伝搬路推定装置及び受信装置の一実施形態を、図面を参照しながら詳述する。
(A) Main Embodiment Hereinafter, an embodiment of a propagation path estimation apparatus and a reception apparatus according to the present invention will be described in detail with reference to the drawings.
(A−1)伝搬路推定装置の全体構成及び動作
図1は、実施形態の伝搬路推定装置1の構成を示すブロック図である。なお、実施形態の受信装置は、実施形態の伝搬路推定装置を利用したものである。
(A-1) Overall Configuration and Operation of Propagation Channel Estimation Device FIG. 1 is a block diagram illustrating a configuration of a propagation
図1において、伝搬路推定装置1は、ビット硬判定部2、伝搬路仮判定部3、周波数領域繰り返し処理部4、時間領域処理部5及び伝搬路平滑化部6を有する。図1では、省略しているが、トレーニングシンボルかデータシンボルかに応じて、各部2〜6の動作を適宜切り替えさせる制御手段も設けられている。
In FIG. 1, the propagation
伝搬路推定装置1には、FFT(高速フーリエ変換)により周波数領域に変換された受信信号が入力される。
The propagation
ビット硬判定部2は、入力された受信信号が既知のトレーニングシンボルであった場合には、なんらの処理も行われず、入力された受信信号がデータシンボルの場合、先に推定され、伝搬路平滑化部6から与えられた伝搬路推定値を用いて、未知の送信ビットを判定(硬判定)するものである。
The bit
このビット硬判定部2によって判定されたデータシンボルは、伝搬路仮判定部3、周波数領域繰り返し処理部4、時間領域処理部5及び伝搬路平滑化部6においては、既知のトレーニングシンボルと同様に処理される。そのため、伝搬路仮判定部3、周波数領域繰り返し処理部4、時間領域処理部5及び伝搬路平滑化部6の機能については、入力された受信信号が既知のトレーニングシンボルである場合を例に説明する。
The data symbols determined by the bit
伝搬路仮判定部3は、既知のトレーニングシンボル情報を用いて伝搬路の特性(以下では、伝搬路の特性を適宜、伝搬路と略する)を仮判定するものである。
The propagation path
周波数領域繰り返し処理部4は、仮判定された伝搬路に対して補間関数を用いた繰り返し処理を施し、特定のサブキャリア情報を補間するものである。
The frequency domain
時間領域処理部5は、補間された伝搬路推定値を、IFFT(逆高速フーリエ変換)処理により時間領域に変換した後、窓関数をかけることにより、雑音や干渉等の不必要な情報を除去するものである。
The time
伝搬路平滑化部6は、時間領域処理部5の出力をFFT処理により周波数領域に変換した後、過去の伝搬路推定値と平滑化し、出力する伝搬路推定値を形成するものである。
The propagation
受信信号(FFTにより周波数領域に変換された受信信号)が既知のトレーニングシンボルである場合には、ビット硬判定部2は機能せず、伝搬路仮判定部3によって、既知のトレーニングシンボル情報から伝搬路が仮判定される。仮判定された伝搬路は、周波数領域繰り返し処理部4によって、補間関数を用いた繰り返し処理が施され、特定のサブキャリア情報が補間される。補間された伝搬路推定値は、時間領域処理部5によって、IFFT処理により時間領域に変換された後、窓関数がかけられることにより、雑音や干渉等の不必要な情報が除去される。時間領域処理部5の出力は、伝搬路平滑化部6によって、FFT処理により周波数領域に変換された後、過去の伝搬路推定値と平滑化された後、出力される。
When the received signal (the received signal converted into the frequency domain by FFT) is a known training symbol, the bit
一方、受信信号がデータシンボルの場合、ビット硬判定部2において、伝搬路平滑化部6から与えられた、先に推定された伝搬路推定値が適用されて、未知の送信ビットが硬判定される。これにより、未知の送信ビット(データシンボル)は、伝搬路推定動作上、既知のシンボルとして取り扱うことができ、伝搬路仮判定部3、周波数領域繰り返し処理部4、時間領域処理部5及び伝搬路平滑化部6によって、トレーニングシンボルの場合と同様な処理が施され、伝搬路が推定される。
On the other hand, when the received signal is a data symbol, the bit
以上のように、未知の情報を伝送しているデータシンボル期間においても、伝搬路を推定することにより、移動機の移動速度が速い場合や、人などの反射物体が移動した場合や、送信機及び受信機間の周波数誤差が大きい場合などでも、より正確な伝搬路推定値が得られ、良好な通信(データ復調)を提供することが可能となる。 As described above, even in the data symbol period in which unknown information is transmitted, by estimating the propagation path, when the moving speed of the mobile device is fast, when a reflecting object such as a person moves, Even when the frequency error between the receivers is large, a more accurate propagation path estimation value can be obtained, and good communication (data demodulation) can be provided.
以下では、IEEE802.11n標準規格におけるMIMO(Multi Input Multi Output)通信に適用した場合について、各部2〜6の詳細を説明する。 Below, the detail of each part 2-6 is demonstrated about the case where it applies to the MIMO (Multi Input Multi Output) communication in IEEE802.11n standard.
(A−2−1)ビット硬判定部2
あるサブキャリアf、時刻tの送信信号ベクトル(縦ベクトルとする;以下、同様)をx(f,t)、伝搬路行列をH(f,t)、雑音ベクトルをn(f,t)とすると、受信信号ベクトルy(f,t)は(1)式のように表現できる。
(A-2-1) Bit
A subcarrier f, a transmission signal vector at time t (referred to as a vertical vector; hereinafter the same) is x (f, t), a channel matrix is H (f, t), and a noise vector is n (f, t). Then, the received signal vector y (f, t) can be expressed as in equation (1).
y(f,t)=H(f,t)x(f,t)+n(f,t) …(1)
ビット硬判定部2では、ZF(Zero−Forcing)、MMSE(Minimum Mean−Square Error)、MLD(Maximum Likelihood Detection)等の技術を用いて、送信信号ベクトルx(f,t)を推定し、硬判定する。ここで、送信信号ベクトルx(f,t)は、1シンボル前に、伝搬路平滑化部6によって推定された伝搬路行列(伝搬路推定値)^H(f,t−1)を用いて推定する(なお、^は推定値を表すものとする)。
y (f, t) = H (f, t) x (f, t) + n (f, t) (1)
The bit
(A−2−2)伝搬路仮判定部3
ビット硬判定部2で推定された送信信号ベクトル(データシンボル期間の場合)、若しくは、トレーニングシンボルで伝送されている既知の情報(トレーニングシンボル期間の場合)をx’(f,t)と定義する。
(A-2-2) Propagation path
A transmission signal vector estimated in the bit hard decision unit 2 (in the case of a data symbol period) or known information transmitted in a training symbol (in the case of a training symbol period) is defined as x ′ (f, t). .
伝搬路仮判定部3は、データシンボル期間では、送信アンテナ数分の受信信号ベクトルy(f,t)を列方向に連結した受信信号行列Y(f,t)と、推定された送信信号ベクトルx’(f,t)を列方向に連結した送信信号行列X’(f,t)(若しくはその逆行列X’−1(f,t))とを生成し、サブキャリアf、時刻tの伝搬路仮判定値行列H’(f,t)を(2)式により求める。
In the data symbol period, the temporary propagation
H’(f,t)=Y(f,t)X’−1(f,t) …(2)
なお、伝搬路仮判定部3は、トレーニングシンボル期間では、受信アンテナ毎の受信信号を既知情報で割ることにより、複数の送信アンテナからの伝搬路が合成された伝搬路推定値(伝搬路仮判定値H’(f,t))を求める。
H ′ (f, t) = Y (f, t) X ′ −1 (f, t) (2)
In the training symbol period, the temporary propagation
(A−2−3)周波数領域繰り返し処理部4
IEEE802.11nでは、複数の送信アンテナを用いた伝送をする場合、送信アンテナ毎に同一のトレーニングシンボルを時間シフトして多重伝送するサイクリックシフトダイバーシティ(Cyclic Shift Diversity;CSD)が採用されている。そのため、受信機では、時間シフトして送信されたトレーニングシンボルから送信アンテナ毎の伝搬路を推定することになる。送信アンテナ毎の伝搬路を推定するには、上述したようにして伝搬路仮判定部3により複数の伝搬路が合成された伝搬路推定値を求めた後、その伝搬路推定値をIFFTで時間領域の合成遅延プロファイルに変換し、送信アンテナ毎に必要な時間領域を窓関数により取り出すことで、遅延プロファイルを分離することを要する。
(A-2-3) Frequency domain
In IEEE802.11n, when performing transmission using a plurality of transmission antennas, cyclic shift diversity (CSD) is employed in which the same training symbol is time-shifted for each transmission antenna and multiplexed and transmitted. Therefore, the receiver estimates the propagation path for each transmission antenna from the training symbols transmitted with time shift. In order to estimate the propagation path for each transmission antenna, after obtaining a propagation path estimated value in which a plurality of propagation paths are combined by the propagation path
しかしながら、IEEE802.11nでは、ガードバンド(GB)及び直流成分(DC)に相当するサブキャリア(非有効サブキャリア)は情報を伝送しない仕組みになっている。トレーニングシンボルのFFTサイズと有効サブキャリア数が異なる場合、求められる合成遅延プロファイルは、非有効サブキャリアの伝搬路推定値が0であることに起因したインパルスが時間領域に広がる波形歪みを持つ。このとき、時間窓による遅延プロファイルの切り出しをすると、窓外に広がった情報を切り捨ててしまうために推定精度が劣化する。 However, in IEEE802.11n, a subcarrier (ineffective subcarrier) corresponding to a guard band (GB) and a direct current component (DC) does not transmit information. When the FFT size of the training symbol is different from the number of effective subcarriers, the obtained combined delay profile has a waveform distortion in which an impulse due to the propagation path estimation value of the ineffective subcarrier being 0 is spread in the time domain. At this time, if the delay profile is cut out by the time window, the information spread outside the window is discarded, and the estimation accuracy deteriorates.
そこで、この実施形態では、周波数領域において、情報が伝送されていないサブキャリアの伝搬路を補間することにより、インパルスが時間領域に広がる波形歪を補償することとした。 Therefore, in this embodiment, the waveform distortion in which the impulse spreads in the time domain is compensated by interpolating the propagation path of the subcarrier in which information is not transmitted in the frequency domain.
周波数領域の伝搬路推定値H’(f,t)が存在し、いくつかのサブキャリアの推定情報が欠落しているとする。この欠落した伝搬路推定値を、補間関数F(n)を用いた繰り返し処理により補間する。 It is assumed that there is a frequency domain propagation path estimation value H ′ (f, t) and some subcarrier estimation information is missing. This missing propagation path estimation value is interpolated by iterative processing using the interpolation function F (n).
伝搬路推定値が欠落しているサブキャリアの数をNlackとする。伝搬路推定値が欠落しているサブキャリアインデックスをmk(k=1,2,…,Nlack)とし、伝搬路仮判定部3の出力をH’(f,t)、補間関数F(n)の長さをNFとすると、ある欠落した伝搬路推定値H’(mk,t)は、(3)式のように更新される。

(3)式によるH’(mk,t)の更新をk=1からNlackまで実行することにより、全ての欠落している伝搬路推定値を補間する。また、このH’(mk,t)に関するk=1からNlackまでの更新処理を1回の反復(以下、イタレーション(iteration)と呼ぶ)とし、このイタレーションを繰り返し実行することで補間精度を向上させる。 By updating H ′ (m k , t) according to equation (3) from k = 1 to N rack , all missing propagation path estimation values are interpolated. Further, the update processing from k = 1 to N rack for H ′ (m k , t) is set as one iteration (hereinafter referred to as iteration), and interpolation is performed by repeatedly executing this iteration. Improve accuracy.
図2は、Niterate回の反復をも含めた周波数領域繰り返し処理部4の処理を示すフローチャートである。パラメータkは、1回のイタレーション内での何番目の欠落した伝送路推定値に対する処理かを表しており、パラメータjは、何回目のイタレーションかを表している。
Figure 2 is a flow chart showing the processing in the frequency domain
パラメータjを初期値1にして、1回目のイタレーションを開始する(ステップ100)。1回目のイタレーション処理では、パラメータkを初期値1にし(ステップ101)、(3)式に示す補間を実行した後(ステップ102)、パラメータkがNlackを越えていないことを確認して(ステップ103)パラメータkを1インクリメントして(ステップ104)、ステップ102に戻る。パラメータkがNlackを越えると、言い換えると、1回目のイタレーションが終了すると、パラメータjがNiterateを越えていないことを確認して(ステップ105)パラメータjを1インクリメントして(ステップ106)、ステップ101に戻る。これにより、2回目のイタレーションを開始する。
The parameter j is set to an
2回目〜Niterate回目のイタレーションも上記と同様に実行され、Niterate回目のイタレーション処理が終了すると、一連の処理を終了する。以上のような処理により、不完全であった伝搬路推定値から補間済みの伝搬路推定値H’’(f,t)が形成される。 Second to N iterate th iteration is also performed as above, the iteration process of the N iterate th is completed, the series of processes ends. Through the processing as described above, an interpolated propagation path estimation value H ″ (f, t) is formed from the incomplete propagation path estimation value.
ここで、伝搬路推定値を補間する補間関数F(n)として、例えば、時間領域の何らかの窓関数W(t)をDFT(離散フーリエ変換)したものを用いる。従って、補間関数F(n)の導出式は、(4)式に示すようになる。(4)式におけるAは任意な値を示しており、NFFTはFFT長を表している。以下では、矩形窓で説明するが、その他の窓関数を適用しても同様な効果が期待できる。時間領域の窓関数W(t)は、(5)式に示すように、遅延パスが存在し得るサンプル時間に1の値を持ち、それ以外の時間では0の値を持つ関数とする。なお、(5)式において、Dは遅延パスが存在し得るサンプル時間の集合を表している。
データシンボル期間では、伝搬路推定値が欠落しているサブキャリアインデックスに、判定誤りと判断した伝搬路推定値を含めて、繰返し処理による伝搬路推定を行うことになる。判定誤りは、例えば、1つ前の伝搬路推定値と現在の伝搬路推定値との二乗誤差を閾値判定することにより判断できる。すなわち、サブキャリアの伝搬路推定値を判定誤りと判断したときには、上述したように、欠落したサブキャリアと同様に、そのサブキャリアの伝搬路推定値の更新を行う。 In the data symbol period, the propagation path estimation by the iterative process is performed by including the propagation path estimation value determined as the determination error in the subcarrier index in which the propagation path estimation value is missing. The determination error can be determined by, for example, determining a square error between the previous channel estimation value and the current channel estimation value as a threshold. That is, when the channel estimation value of a subcarrier is determined to be a determination error, as described above, the channel estimation value of the subcarrier is updated in the same manner as the missing subcarrier.
周波数領域繰返し処理には、伝搬路推定値が欠落しているサブキャリアインデックスの伝搬路推定値(判定誤りと判断した伝搬路推定値を含む)の初期値が必要になる。繰り返し処理を行う際の、補間すべきサブキャリアの初期値として、以下の(a)〜(d)のいずれかの初期値を設定する。 The frequency domain repetition process requires an initial value of a channel estimation value (including a channel estimation value determined to be a determination error) of a subcarrier index for which a channel estimation value is missing. One of the following initial values (a) to (d) is set as the initial value of the subcarrier to be interpolated when performing the iterative processing.
(a)0またはそれ以外の固定値
(b)1つ前の時間の伝搬路推定値
(c)左右のサブキャリアの伝搬路推定値の平均
(d)その他、時間方向・周波数方向で平均化(単純平均、重み付け平均など)を施した伝搬路推定値
周波数領域繰り返し処理部4の構成として、(3)式の途中結果をメモリに保持しておく構成を採用することにより、繰り返し処理の2回目の反復以降の演算量を削減することができる。以下、図3及び図4を参照しながら、このことを説明する。
(A) 0 or any other fixed value (b) Propagation path estimated value for the previous time (c) Average of propagation path estimated values for the left and right subcarriers (d) In addition, averaging in time direction and frequency direction Propagation channel estimation values subjected to (simple average, weighted average, etc.) As the configuration of the frequency domain
例として、FFTサイズ=補間関数長=32であり、欠落した推定値の数Nlackが4である場合を考える。ある欠落した推定値H(A)を補間する場合、補間式が上述した(3)式に示すように積和演算であるので、イタレーションの1回目は、図3に示すように、32タップのFIRフィルタリングと等価な処理となる。ここで、既知の推定値は更新されないため、既知の推定値が入力されるタップの出力は、次回以降のイタレーションでも同一である。そこで、既知の推定値が入力されるタップの出力の総和をメモリM1、M2に保持しておくことにより、図4に示すように、イタレーション2回目以降の推定値H(A)の更新処理では、4タップのFIRフィルタリングと等価な処理を行った後、メモリM1、M2の格納内容と合成すれば良いこととなる。以上のように、イタレーション2回目以降の補間関数F(n)を適用する演算量は、1回目のイタレーションのNlack/フィルタ長NFに削減することができる。 As an example, consider the case where FFT size = interpolation function length = 32 and the number of missing estimated values N rack is 4. When a certain estimated value H (A) is interpolated, since the interpolation formula is a product-sum operation as shown in the above-described formula (3), the first iteration is 32 taps as shown in FIG. This is equivalent to the FIR filtering. Here, since the known estimated value is not updated, the output of the tap to which the known estimated value is input is the same in the next and subsequent iterations. Therefore, the sum of the outputs of the taps to which the known estimated values are input is held in the memories M1 and M2, thereby updating the estimated value H (A) after the second iteration as shown in FIG. Then, after performing a process equivalent to 4-tap FIR filtering, it may be combined with the contents stored in the memories M1 and M2. As described above, the calculation amount to which the interpolation function F (n) after the second iteration is applied can be reduced to N rack / filter length NF of the first iteration.
さらに、周波数領域繰り返し処理部4において、補間関数F(n)の特徴を生かした演算量削減も可能である。
Furthermore, in the frequency domain
補間関数F(n)は、その関数の長さNFが、時間領域の矩形フィルタの長さNrectの倍数である場合には、周波数領域で0の値を持つタップを有する。値が0のタップは計算する必要がないので、関数長NF、矩形フィルタ長Nrectの設定を工夫すれば、演算量を削減することができる。 The interpolation function F (n) has a tap having a value of 0 in the frequency domain when the function length N F is a multiple of the length N rect of the time domain rectangular filter. Since it is not necessary to calculate a tap having a value of 0, the amount of calculation can be reduced by devising the setting of the function length N F and the rectangular filter length N rect .
例えば、NF=NFFT=64、Nrect=32の場合、上述した(4)式に従う補間関数F(n)は、図5に示すようになり(但し、図5では、(4)式とは異なり、nを、0を中心として正負の範囲で変化するように表している)、0のタップが31個存在する。この補間関数F(n)を適用し、0のタップの演算を省略するようにした場合、演算量を、本来の演算量の33/64(約1/2)に削減することができる。また、この例の場合、0以外の実数要素Iは、F(0)以外で常に同一の値を持ち、虚数要素Qは、F(0)を中心に対称になっていることを利用し、演算量のさらなる削減も可能である。 For example, when N F = N FFT = 64 and N rect = 32, the interpolation function F (n) according to the above equation (4) is as shown in FIG. 5 (however, in FIG. 5, in equation (4) Unlike n, n is represented so as to change in a positive and negative range centered on 0), and there are 31 taps of 0. When this interpolation function F (n) is applied and the calculation of the tap of 0 is omitted, the calculation amount can be reduced to 33/64 (about 1/2) of the original calculation amount. In this example, the real element I other than 0 always has the same value other than F (0), and the imaginary element Q is symmetric about F (0). The amount of calculation can be further reduced.
補間関数F(n)としては種々のものを適用でき、例えば、(6)式に示すようなsinc関数を適用することもできる。なお、窓関数の形状によっては、(4)式で表される補間関数がsinc関数になることもある。(6)式におけるA、Bは任意の値である。
(A−2−4)時間領域処理部5
時間領域処理部5は、送信アンテナ毎の伝搬路を分離し、雑音及び干渉成分を除去するために、時間領域で処理を行う。(7)式は、時間領域処理部5で行う処理を示したものである。
The time
時間領域処理部5は、周波数領域繰り返し処理部4で得られた伝搬路推定値H’’(f,t)をIFFTにより時間領域に変換し、時間領域において窓関数W(k)をかけることにより送信アンテナ毎の伝搬路の分離と雑音及び干渉成分の除去を同時に行う。ここでは、窓関数W(k)として、周波数領域繰り返し処理部4で用いた矩形窓を用いることにするが、1の値と0の値を持つサンプルが異なっていても良いし、ハミング窓、カイザー窓、ブラックマン窓などの他の窓関数を用いても良い。CSDを用いて多重されている伝搬路を分離する場合、CSDでシフトされたサンプルだけ時間シフトした前記窓関数W(k),shiftを用いる必要がある。その後、CSDの時間シフト(shift)を補償し((6)式におけるROT{}はかかる処理を表している)、FFTにより再度周波数領域に変換することにより、H’’’(f,t)を得る。
The time
しかしながら、周波数領域繰り返し処理部4において、伝搬路推定値が欠落しているサブキャリアを十分に復元できない環境(低SINR(信号対干渉雑音電力比)環境など)においては、時間領域処理により特性を劣化させる可能性がある。このことから、時間領域処理部5は、時間領域の処理を行わず、周波数領域繰り返し処理部4で得られた伝搬路推定値H’’(f,t)をそのまま、当該時間領域処理部5からの出力H’’’(f,t)とする時間領域処理OFFの機能をも有する。例えば、時間領域処理部5は、図示しないSINR測定部の測定結果が低い場合に、時間領域処理をOFFしたり、利用者の該当する操作子に対する操作に応じて時間領域処理をOFFしたりする。
However, in an environment where the frequency domain
(A−2−5)伝搬路平滑化部6
伝搬路平滑化部6は、時間領域処理部5により得られた伝搬路推定値H’’’(f,t)と、1シンボル前の伝搬路推定値^H(f,t−1)とを用いて、(8)式により時間方向に平滑化された伝搬路推定値^H(f,t)を得る。(8)式において、αは忘却係数である。
The propagation
(8)式では、忘却平均により時間方向に平滑化された伝搬路推定値を得たが、区間平均や移動平均などによる平滑化手段を用いたとしても、(8)式を適用した場合と同様の効果が期待できる。 In equation (8), the channel estimation value smoothed in the time direction by the forgetting average is obtained, but even if smoothing means such as interval average or moving average is used, when equation (8) is applied, Similar effects can be expected.
(A−3)実施形態の効果
上記実施形態によれば、データシンボル期間においても、トレーニングシンボル期間から連続して伝搬路を推定するようにしたので、移動機の移動速度が速い場合や、人などの反射物体が移動した場合や、送信機及び受信機間の周波数誤差が大きい場合などでも、データシンボル期間で正確な伝搬路推定値が得られ、良好な通信(データ復調)を提供することが可能となる。
(A-3) Effect of Embodiment According to the above embodiment, since the propagation path is continuously estimated from the training symbol period even in the data symbol period, when the moving speed of the mobile device is fast, Even when a reflecting object such as a moving object or a frequency error between a transmitter and a receiver is large, an accurate propagation path estimation value can be obtained in a data symbol period and good communication (data demodulation) should be provided. Is possible.
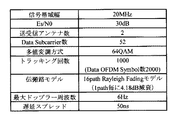
以下、IEEE802.11nに適用した場合の効果(シミュレーションの結果)を説明する。図6に、効果を確認した具体例システムのパラメータを示す。送信アンテナを2本(Tx1、Tx2)とし、一方の送信アンテナTx1に対して他方の送信アンテナTx2からは、送信信号を400ns(8サンプル)だけシフトしたシンボルが送信されている。 Hereinafter, effects (simulation results) when applied to IEEE802.11n will be described. FIG. 6 shows parameters of a specific example system whose effect has been confirmed. Two transmission antennas (Tx1, Tx2) are used, and a symbol obtained by shifting a transmission signal by 400 ns (8 samples) is transmitted from one transmission antenna Tx1 to the other transmission antenna Tx2.
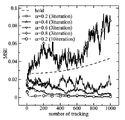
図7は、上述した具体例システムにおける特性を示している。横軸は、追従回数(伝搬路推定に用いたデータOFDMシンボル数/2)を示している。なお、図7は、トレーニングシンボル期間での状態を省略している。縦軸は、伝搬路推定値の二乗平均誤差(MSE)を示している。 FIG. 7 shows the characteristics of the above-described specific example system. The horizontal axis represents the number of follow-ups (number of data OFDM symbols used for propagation path estimation / 2). In FIG. 7, the state in the training symbol period is omitted. The vertical axis represents the mean square error (MSE) of the propagation path estimated value.
図7におけるholdが従来技術を適用した場合であり、トレーニングシンボル期間終了時の伝搬路推定値をホールドしてデータシンボル期間に適用した場合には、MSEは徐々に大きくなっている。一方、実施形態では、特性劣化を抑圧できている。 The hold in FIG. 7 is a case where the prior art is applied, and when the channel estimation value at the end of the training symbol period is held and applied to the data symbol period, the MSE gradually increases. On the other hand, in the embodiment, characteristic deterioration can be suppressed.
また、図7からは、忘却係数αが小さいほどMSEが時間経過(追従回数)と共に良好になっていることが分かり、また、イタレーションが多いほど、早期にMSEが良好になることが分かる。特に、忘却係数αが0.2の場合、追従回数1000の位置においては(追従回数1000の位置ではイタレーションの回数の相違は関係なくなっている)、従来技術に比較して、MSEを97%以上も改善できていることが分かる。 From FIG. 7, it can be seen that the smaller the forgetting factor α, the better the MSE with time (number of follow-ups), and the more the iteration, the better the MSE. In particular, when the forgetting factor α is 0.2, the MSE is 97% at the position of the number of follow-ups 1000 (the difference in the number of iterations is irrelevant at the position of the number of follow-ups 1000) as compared with the prior art. It turns out that the above is also improved.
(B)他の実施形態
上記実施形態の説明においても、種々変形実施形態に言及したが、さらに、以下に例示する様な変形実施形態を挙げることができる。
(B) Other Embodiments In the description of the above-described embodiment, various modified embodiments have been referred to. However, modified embodiments as exemplified below can be given.
上記実施形態の説明では言及しなかったが、ビット硬判定部2、伝搬路仮判定部3、周波数領域繰り返し処理部4、時間領域処理部5及び伝搬路平滑化部6の全て又は一部を、専用のICチップで構成しても良く、また、ディスクリート部品などでハードウェア的に構成しても良く、さらには、DSPで実現するようにしても良い。また、CPUと、CPUが実行するプログラムとして、ビット硬判定部2、伝搬路仮判定部3、周波数領域繰り返し処理部4、時間領域処理部5及び伝搬路平滑化部6の全て又は一部を実現するようにしても良い。
Although not mentioned in the description of the above embodiment, all or part of the bit
図1では、伝搬路推定装置1の伝搬路推定値を後段回路(データ復調部など)に与えるように記載しているが、伝搬路推定装置1におけるビット硬判定部2を、データ復調部としてそのまま利用するようにしても良い。
In FIG. 1, the propagation path estimation value of the propagation
また、上記実施形態では、トレーニングシンボルの処理系と、データシンボルの処理系とが一部共通しているものを示したが、トレーニングシンボルの処理系と、データシンボルの処理系とを分けて構成するようにしても良い。 In the above embodiment, the training symbol processing system and the data symbol processing system are partially shared. However, the training symbol processing system and the data symbol processing system are configured separately. You may make it do.
上記実施形態の説明では、IEEE802.11nにおけるMIMO通信に本発明を適用した場合を説明したが、他の無線通信システムに対しても、本発明を適用することができる。すなわち、MIMO通信以外でも本発明を適用でき、しかも、マルチキャリアシステムに限定されない。また、データ変調方式なども限定されるものではない。例えば、WLAN、WPAN、WiMAX、MBWA、3GPP、3GPP2、及びデジタルテレビ放送で標準化されている通信方式であるOFDM、OFDMA、SC−FDMA、SC−CDMA、MC−CDMAなどに対しても本発明を適用可能である。 In the description of the above embodiment, the case where the present invention is applied to MIMO communication in IEEE802.11n has been described, but the present invention can also be applied to other wireless communication systems. That is, the present invention can be applied to other than MIMO communication, and is not limited to a multicarrier system. Further, the data modulation method and the like are not limited. For example, the present invention is also applied to WLAN, WPAN, WiMAX, MBWA, 3GPP, 3GPP2, and OFDM, OFDMA, SC-FDMA, SC-CDMA, MC-CDMA, etc., which are communication systems standardized in digital television broadcasting. Applicable.
1…伝搬路推定装置、2…ビット硬判定部、3…伝搬路仮判定部、4…周波数領域繰り返し処理部、5…時間領域処理部、6…伝搬路平滑化部。
DESCRIPTION OF
Claims (10)
トレーニングシンボルの受信信号を用いて伝搬路を推定する初期伝搬路推定手段と、
推定された伝搬路推定値を適用し、データシンボルの受信信号から伝搬路特性の影響を軽減した後に、閾値との比較により硬判定値を得るビット硬判定部と、その硬判定値をデータシンボルの既知情報とし、伝搬路の推定をデータシンボルの受信信号期間においても継続する伝搬路追従部とを有する追従手段と
を備えたことを特徴とする伝搬路推定装置。 In a propagation path estimation apparatus provided in a receiving apparatus that receives a signal having a data symbol that is unknown information following a training symbol that is known information,
Initial propagation path estimation means for estimating the propagation path using the received signal of the training symbol;
Applying the estimated channel estimation value, after reducing the influence of the propagation path characteristics from the received signal of the data symbol, and the resulting Ru-bit hard decision unit a hard decision value by comparison with the threshold value, the hard decision value data A channel estimation device comprising: a tracking unit having known information of a symbol, and a channel tracking unit that continues channel channel estimation even during a data symbol reception signal period.
上記初期伝搬路推定手段が、
入力されたトレーニングシンボルの信号から、伝搬路の仮判定値を得る第1の伝搬路仮判定部と、
上記第1の伝搬路仮判定部から、伝搬路の仮判定値が入力され、伝搬路の仮判定値を初期値とし、周波数領域で、特定のサブキャリアに対して、予め定められた補間関数により繰り返し補間処理を行う周波数領域繰り返し処理部と、
上記周波数領域繰り返し処理部から出力された、周波数領域で補間された伝搬路推定値に対し、時間領域で予め定めた窓関数をかける、処理のON/OFFを切り替えられる時間領域処理部とを有する
ことを特徴とする請求項1に記載の伝搬路推定装置。 The propagation path estimation apparatus receives a signal in which information is distributed to a plurality of subcarriers,
The initial propagation path estimation means is
A first propagation path tentative determination unit for obtaining a propagation path tentative determination value from the input training symbol signal ;
From the first propagation path tentative determination unit, a propagation path tentative determination value is input, the propagation path tentative determination value is set as an initial value, and a predetermined interpolation function is determined for a specific subcarrier in the frequency domain. A frequency domain repetitive processing unit that performs repetitive interpolation processing with
A time domain processing unit that applies a predetermined window function in the time domain to the propagation path estimated value interpolated in the frequency domain output from the frequency domain iterative processing unit and can be switched ON / OFF of the processing. The propagation path estimation apparatus according to claim 1.
上記ビット硬判定部の出力を用いて伝搬路を仮推定する第2の伝搬路仮推定部と、
上記周波数領域繰り返し処理部及び上記時間領域処理部と同様の構成を有する伝搬路補間部と、
上記伝搬路補間部の出力を平滑化する伝搬路平滑化部とを有する
ことを特徴とする請求項1に記載の伝搬路推定装置。 The propagation path follower is
A second propagation path temporary estimation unit that temporarily estimates a propagation path using the output of the bit hard decision unit;
A propagation path interpolation unit having the same configuration as the frequency domain repetition processing unit and the time domain processing unit;
The propagation path estimation apparatus according to claim 1, further comprising: a propagation path smoothing unit that smoothes an output of the propagation path interpolation unit.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007215835A JP5249541B2 (en) | 2007-08-22 | 2007-08-22 | Propagation path estimation apparatus and reception apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007215835A JP5249541B2 (en) | 2007-08-22 | 2007-08-22 | Propagation path estimation apparatus and reception apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009049882A JP2009049882A (en) | 2009-03-05 |
| JP5249541B2 true JP5249541B2 (en) | 2013-07-31 |
Family
ID=40501630
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007215835A Expired - Fee Related JP5249541B2 (en) | 2007-08-22 | 2007-08-22 | Propagation path estimation apparatus and reception apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5249541B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5941017B2 (en) * | 2013-05-30 | 2016-06-29 | 日本電信電話株式会社 | Wireless communication apparatus, channel estimation method, and wireless communication system |
| JP6317273B2 (en) * | 2015-02-10 | 2018-04-25 | 日本電信電話株式会社 | Wireless communication system, terminal station apparatus, and wireless communication method |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11355849A (en) * | 1998-06-05 | 1999-12-24 | Fujitsu Ltd | Synchronizing signal detection method using pilot and tentative discrimination data symbol, mobile communication receiver and interference eliminating device |
| JP2982797B1 (en) * | 1998-08-03 | 1999-11-29 | 日本電気株式会社 | Demodulation circuit in CDMA receiver |
| JP2001352311A (en) * | 2000-06-07 | 2001-12-21 | Mitsubishi Electric Corp | Detection method and multi-carrier receiver |
| JP3910453B2 (en) * | 2002-01-23 | 2007-04-25 | 三菱電機株式会社 | Reception device and transmission path estimation method |
| US20040165683A1 (en) * | 2002-09-04 | 2004-08-26 | Gupta Alok Kumar | Channel estimation for communication systems |
| JP4523294B2 (en) * | 2003-02-10 | 2010-08-11 | 三菱電機株式会社 | Communication device |
| JP2004348929A (en) * | 2003-05-26 | 2004-12-09 | Sony Corp | Device and method for processing signal |
| WO2006098011A1 (en) * | 2005-03-16 | 2006-09-21 | Fujitsu Limited | Radio communication device in multi-input system and channel estimation and separation method |
| JP2007151046A (en) * | 2005-11-30 | 2007-06-14 | Mitsubishi Electric Corp | Communication apparatus |
-
2007
- 2007-08-22 JP JP2007215835A patent/JP5249541B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009049882A (en) | 2009-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104283825B (en) | A kind of channel estimation methods perceived based on dynamic compression | |
| US8130852B2 (en) | Method for estimating channel in radio communication system and device therefor | |
| CN103716262B (en) | Channel estimation by time-domain parameter extraction | |
| JP4272665B2 (en) | Apparatus, method, and computer program for estimating channel of OFDM transmission system | |
| EP3817312A1 (en) | Method and apparatus for estimating angle of arrival of signals in wireless communication system | |
| US7577194B2 (en) | Equalizer and equalization method | |
| JP2007089167A (en) | Method of channel estimation in orthogonal frequency division multiplexing system and channel estimator | |
| CN110677361B (en) | Signal equalization method, equalizer and storage medium for orthogonal time-frequency space system | |
| CN105337906B (en) | Channel estimation methods and device | |
| WO2011054279A1 (en) | Multi-antenna channel estimation method based on polyphase decomposition | |
| Masmoudi et al. | A maximum-likelihood channel estimator in MIMO full-duplex systems | |
| KR101433112B1 (en) | Receiving apparatus and method for single carrier frequency division access | |
| EP1901505A2 (en) | Wireless communication apparatus | |
| CN113055317A (en) | Orthogonal matching tracking channel estimation method for underwater sound OFDM system | |
| KR20170096557A (en) | Method and apparatus for data-aided iterative channel estimation | |
| JP5832652B2 (en) | Receiver, receiver channel frequency response estimation method | |
| US20120213315A1 (en) | Process for estimating the channel in a ofdm communication system, and receiver for doing the same | |
| JP5249541B2 (en) | Propagation path estimation apparatus and reception apparatus | |
| Huang et al. | Improving channel estimation for rapidly time-varying correlated underwater acoustic channels by tracking the signal subspace | |
| CN107968760B (en) | Receiving algorithm based on iterative channel estimation in filtering multi-tone modulation system | |
| JP2006245810A (en) | Fraction spacing equalizer and receiver using it | |
| JP4213747B2 (en) | Sliding window-based equalizer with reduced complexity | |
| CN109302360B (en) | Channel estimation method and device, computer readable storage medium and terminal | |
| US7864901B2 (en) | System, apparatus, and method for cancelling interferences of received signals | |
| EP2961118B1 (en) | Method for channel estimation and equalization |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100409 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120724 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130123 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130409 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130412 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5249541 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160419 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |