JP5247591B2 - 画像処理装置及びその制御方法 - Google Patents
画像処理装置及びその制御方法 Download PDFInfo
- Publication number
- JP5247591B2 JP5247591B2 JP2009123957A JP2009123957A JP5247591B2 JP 5247591 B2 JP5247591 B2 JP 5247591B2 JP 2009123957 A JP2009123957 A JP 2009123957A JP 2009123957 A JP2009123957 A JP 2009123957A JP 5247591 B2 JP5247591 B2 JP 5247591B2
- Authority
- JP
- Japan
- Prior art keywords
- total number
- processing apparatus
- image processing
- steps
- block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression Of Band Width Or Redundancy In Fax (AREA)
- Image Processing (AREA)
Description
本発明の第2の画像処理装置は、ブロック単位で圧縮された画像に対し、ブロックノイズを低減するための補正を施す画像処理装置であって、前記画像から画素値の段差を検出する検出手段と、前記検出手段で検出された段差に基づいて、所定周期の各位相における段差の総数をカウントするカウント手段と、前記カウント手段でカウントされた段差の総数のうち、隣接するブロック間の境界であるブロック境界に対応する位相における段差の総数である第1総数と、他の位相における段差の総数である第2総数とに基づいて、前記補正の強さを設定する設定手段と、を有し、前記設定手段は、前記第1総数と前記第2総数との差が大きいほど、または、前記第1総数に対する前記第2総数の比が小さいほど、ブロックノイズの低減効果を高めることを特徴とする。
本発明の第2の画像処理装置の制御方法は、ブロック単位で圧縮された画像に対し、ブロックノイズを低減するための補正を施す画像処理装置の制御方法であって、前記画像から画素値の段差を検出する検出ステップと、前記検出ステップで検出された段差に基づいて、所定周期の各位相における段差の総数をカウントするカウントステップと、前記カウントステップでカウントされた段差の総数のうち、隣接するブロック間の境界であるブロック境界に対応する位相における段差の総数である第1総数と、他の位相における段差の総数である第2総数とに基づいて、前記補正の強さを設定する設定ステップと、を有し、前記設定ステップでは、前記第1総数と前記第2総数との差が大きいほど、または、前記第1総数に対する前記第2総数の比が小さいほど、ブロックノイズの低減効果が高められることを特徴とする。
A’=|A−B| (式1)
B’=|B−C| (式2)
C’=|C−D| (式3)
差分値算出部102は、以上の差分値A’,B’,C’を段差判定部103へ出力する。
A’<th1 (式4)
C’<th1 (式5)
th2<B’<th3 (式6)
差分値A’,B’,C’が式4〜6の全てを満たす場合には、段差判定部103は、画素2と画素3の間で段差が生じていると判定し、段差判定結果として1を出力する。式4〜6のうち満たされないものが1つでも存在する場合には、段差判定部103は、画素2と画素3の間で段差が生じていないと判定し、段差判定結果として0を出力する。閾値th1は、隣接画素間の画素値の変化が小さいか否かを判断するための閾値である。閾値th2は、画素2と画素3の間の画素値の差が視覚的に捉えることのできる値であるか否かを判断するための閾値である(差分値B’が小さい場合には段差は目に付かない)。閾値th3は、画像内の物体の輪郭部分などを誤検出するのを防ぐための閾値である(輪郭部分の画素値の差は、通常、ブロック境界段差に比べて十分大きい)。
0〜7の8通りの位相のそれぞれについて、ブロック境界の周期で段差判定部103から出力された信号のうち、1が出力された総数がカウントされる。
また、ブロック境界の間隔が10.67画素、周期値が32の場合には、周期ヒストグラムにはブロック境界を示す位相は3つ存在する。ピーク検出部107は、それら3つの位相の度数のうち、最大値を第1総数として抽出する。そして、それら3つの位相を除いた位相から、度数が最大となる位相を検出し、その度数を第2総数として抽出する。
段差信頼度判定部108は、第1総数と第2総数とを用いてブロック境界段差の信頼度を算出する。ブロック境界段差の信頼度とは、ブロックノイズを低減する必要がある段差か否かを表す度合いである。本実施形態では、信頼度が高い段差ほどブロックノイズを低減する必要があるものとする。具体的には、第2総数はブロック境界段差では無い段差(画像段差)の度数であり、第1総数が第2総数よりも大きいほど、ブロック境界段差は見た目上目立ち易いものと考えられる。逆に第1総数と第2総数の差が小さいほど、ブロック境界段差は見た目上目立ち難いものと考えられる。また、第2の総数が第1の総数よりも少ない場合は、ブロック境界段差はさらに目立ち難い。そのため、本実施形態では、第1総数が第2総数よりも大きいほど信頼度が高くなるように、信頼度を算出する。信頼度は、フレーム単位で画像全体に対して算出される。
N=16×(1−peak_max2/peak_max1) (式7)
但し、本実施形態では、信頼度の値Nは0〜16の整数であるものとする。具体的には、式7において、Nが小数点以下の値を含む場合には、その値を切り捨て、peak_max2>peak_max1の場合にはN=0とする。なお、信頼度Nの算出式は式7に限らない。第1総数と第2総数の差に応じて信頼度を決定することができればどのような方
法であってもよい。
また、フレーム単位で画像全体の領域について周期ヒストグラムを算出する場合を例に挙げて説明したが、画像を複数の領域に分割し、分割された領域毎に周期ヒストグラムを算出するようにしてもよい。この場合は、分割領域毎に、信頼度Nの算出、フィルター係数の選択、およびフィルター処理を行う。画像全体に対して処理を行う場合に比べると、処理負荷は大きくなるが、分割領域毎の画像の特徴に適したフィルター処理を施すことが可能となる。
に比べて多いか少ないかを判断できる。ブロック境界と周期、位相を異ならせて、ブロック境界以外の位置に存在する段差の総数をカウントしてもよい。
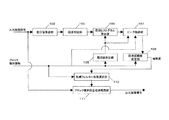
103 段差判定部
105 周期値決定部
106 周期ヒストグラム算出部
107 ピーク検出部
108 段差信頼度判定部
110 低減フィルター係数選択部
Claims (24)
- ブロック単位で圧縮された画像に対し、ブロックノイズを低減するための補正を施す画像処理装置であって、
前記画像から画素値の段差を検出する検出手段と、
前記検出手段で検出された複数の段差のうち隣接するブロック間の境界であるブロック境界に位置する段差の総数を第1総数としてカウントし、前記検出手段で検出された複数の段差のうち前記ブロック境界とは異なる位置に存在する段差の総数を第2総数としてカウントするカウント手段と、
前記第1総数と前記第2総数に基づいて、前記補正の強さを設定する設定手段と、
を有し、
前記設定手段は、前記第1総数と前記第2総数との差が大きいほど、または、前記第1総数に対する前記第2総数の比が小さいほど、ブロックノイズの低減効果を高める
ことを特徴とする画像処理装置。 - 前記カウント手段は、前記ブロック境界と同じ周期で位相の異なる位置に存在する前記段差の総数を、位相毎にカウントし、位相毎の段差の総数のうち最大値を前記第2総数とする
ことを特徴とする請求項1に記載の画像処理装置。 - 前記設定手段は、前記第1総数から前記第2総数を減算した値が大きいほど、ブロックノイズの低減効果を高める
ことを特徴とする請求項1または2に記載の画像処理装置。 - 前記設定手段は、前記第1総数に対する前記第2総数の比が小さいほど高くなる信頼度を算出し、信頼度が高いほどブロックノイズの低減効果を高める
ことを特徴とする請求項1または2に記載の画像処理装置。 - 周期が同じで位相が異なる位置に前記ブロック境界が存在する場合に、前記カウント手段は、前記ブロック境界に位置する段差の総数を、位相毎にカウントし、位相毎の段差の
総数のうち最大値を前記第1総数とする
ことを特徴とする請求項1〜4のいずれか1項に記載の画像処理装置。 - 前記カウント手段は、前記ブロック境界の間隔、位置、または、その両方を表す情報を取得し、取得した前記情報から前記ブロック境界の位置を判断する
ことを特徴とする請求項1〜5のいずれか1項に記載の画像処理装置。 - 前記補正は、ブロックノイズの低減効果が互いに異なる複数の補正係数のうちの1つを用いて行うものであり、
前記設定手段は、前記第1総数と前記第2総数との差に応じて、前記複数の補正係数の中から1つを選択する
ことを特徴とする請求項1〜6のいずれか1項に記載の画像処理装置。 - 前記検出手段は、画素値の変化が閾値よりも小さい第1の隣接画素群と、画素値の変化が閾値よりも小さい第2の隣接画素群の間に、所定の大きさの画素値の差が存在する位置を前記段差として検出する
ことを特徴とする請求項1〜7のいずれか1項に記載の画像処理装置。 - ブロック単位で圧縮された画像に対し、ブロックノイズを低減するための補正を施す画像処理装置の制御方法であって、
前記画像から画素値の段差を検出する検出ステップと、
前記検出ステップで検出された複数の段差のうち隣接するブロック間の境界であるブロック境界に位置する段差の総数を第1総数としてカウントし、前記検出ステップで検出された複数の段差のうち前記ブロック境界とは異なる位置に存在する段差の総数を第2総数としてカウントするカウントステップと、
前記第1総数と前記第2総数に基づいて、前記補正の強さを設定する設定ステップと、を有し、
前記設定ステップでは、前記第1総数と前記第2総数との差が大きいほど、または、前記第1総数に対する前記第2総数の比が小さいほど、ブロックノイズの低減効果が高められる
ことを特徴とする画像処理装置の制御方法。 - 前記カウントステップでは、前記ブロック境界と同じ周期で位相の異なる位置に存在する前記段差の総数が、位相毎にカウントされ、位相毎の段差の総数のうち最大値が前記第2総数とされる
ことを特徴とする請求項9に記載の画像処理装置の制御方法。 - 前記設定ステップでは、前記第1総数から前記第2総数を減算した値が大きいほど、ブロックノイズの低減効果が高められる
ことを特徴とする請求項9または10に記載の画像処理装置の制御方法。 - 前記設定ステップでは、前記第1総数に対する前記第2総数の比が小さいほど高くなる信頼度が算出され、信頼度が高いほどブロックノイズの低減効果が高められる
ことを特徴とする請求項9または10に記載の画像処理装置の制御方法。 - 周期が同じで位相が異なる位置に前記ブロック境界が存在する場合に、前記カウントステップでは、前記ブロック境界に位置する段差の総数が、位相毎にカウントされ、位相毎の段差の総数のうち最大値が前記第1総数とされる
ことを特徴とする請求項9〜12のいずれか1項に記載の画像処理装置の制御方法。 - 前記カウントステップでは、前記ブロック境界の間隔、位置、または、その両方を表す情報が取得され、取得された前記情報から前記ブロック境界の位置が判断される
ことを特徴とする請求項9〜13のいずれか1項に記載の画像処理装置の制御方法。 - 前記補正は、ブロックノイズの低減効果が互いに異なる複数の補正係数のうちの1つを用いて行うものであり、
前記設定ステップでは、前記第1総数と前記第2総数との差に応じて、前記複数の補正係数の中から1つが選択される
ことを特徴とする請求項9〜14のいずれか1項に記載の画像処理装置の制御方法。 - 前記検出ステップでは、画素値の変化が閾値よりも小さい第1の隣接画素群と、画素値の変化が閾値よりも小さい第2の隣接画素群の間に、所定の大きさの画素値の差が存在する位置が前記段差として検出される
ことを特徴とする請求項9〜15のいずれか1項に記載の画像処理装置の制御方法。 - ブロック単位で圧縮された画像に対し、ブロックノイズを低減するための補正を施す画像処理装置であって、
前記画像から画素値の段差を検出する検出手段と、
前記検出手段で検出された段差に基づいて、所定周期の各位相における段差の総数をカウントするカウント手段と、
前記カウント手段でカウントされた段差の総数のうち、隣接するブロック間の境界であるブロック境界に対応する位相における段差の総数である第1総数と、他の位相における段差の総数である第2総数とに基づいて、前記補正の強さを設定する設定手段と、
を有し、
前記設定手段は、前記第1総数と前記第2総数との差が大きいほど、または、前記第1総数に対する前記第2総数の比が小さいほど、ブロックノイズの低減効果を高める
ことを特徴とする画像処理装置。 - 前記第2総数は、前記ブロック境界に対応する位相とは異なる位相の段差の総数のうち最大の総数である
ことを特徴とする請求項17に記載の画像処理装置。 - 前記ブロック境界の間隔、位置、または、その両方を表す情報を取得し、取得した前記情報から前記ブロック境界の位置を判断する判断手段をさらに有する
ことを特徴とする請求項17または18に記載の画像処理装置。 - 前記検出手段は、画素値の変化が閾値よりも小さい第1の隣接画素群と、画素値の変化が閾値よりも小さい第2の隣接画素群の間に、所定の大きさの画素値の差が存在する位置を前記段差として検出する
ことを特徴とする請求項17〜19のいずれか1項に記載の画像処理装置。 - ブロック単位で圧縮された画像に対し、ブロックノイズを低減するための補正を施す画像処理装置の制御方法であって、
前記画像から画素値の段差を検出する検出ステップと、
前記検出ステップで検出された段差に基づいて、所定周期の各位相における段差の総数をカウントするカウントステップと、
前記カウントステップでカウントされた段差の総数のうち、隣接するブロック間の境界であるブロック境界に対応する位相における段差の総数である第1総数と、他の位相における段差の総数である第2総数とに基づいて、前記補正の強さを設定する設定ステップと、
を有し、
前記設定ステップでは、前記第1総数と前記第2総数との差が大きいほど、または、前記第1総数に対する前記第2総数の比が小さいほど、ブロックノイズの低減効果が高められる
ことを特徴とする画像処理装置の制御方法。 - 前記第2総数は、前記ブロック境界に対応する位相とは異なる位相の段差の総数のうち最大の総数である
ことを特徴とする請求項21に記載の画像処理装置の制御方法。 - 前記ブロック境界の間隔、位置、または、その両方を表す情報を取得し、取得した前記情報から前記ブロック境界の位置を判断する判断ステップをさらに有する
ことを特徴とする請求項21または22に記載の画像処理装置の制御方法。 - 前記検出ステップでは、画素値の変化が閾値よりも小さい第1の隣接画素群と、画素値の変化が閾値よりも小さい第2の隣接画素群の間に、所定の大きさの画素値の差が存在する位置が前記段差として検出される
ことを特徴とする請求項21〜23のいずれか1項に記載の画像処理装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009123957A JP5247591B2 (ja) | 2009-05-22 | 2009-05-22 | 画像処理装置及びその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009123957A JP5247591B2 (ja) | 2009-05-22 | 2009-05-22 | 画像処理装置及びその制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010273168A JP2010273168A (ja) | 2010-12-02 |
| JP2010273168A5 JP2010273168A5 (ja) | 2012-06-28 |
| JP5247591B2 true JP5247591B2 (ja) | 2013-07-24 |
Family
ID=43420831
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009123957A Active JP5247591B2 (ja) | 2009-05-22 | 2009-05-22 | 画像処理装置及びその制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5247591B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8588535B2 (en) | 2010-09-15 | 2013-11-19 | Sharp Laboratories Of America, Inc. | Methods and systems for estimation of compression noise |
| US8600188B2 (en) | 2010-09-15 | 2013-12-03 | Sharp Laboratories Of America, Inc. | Methods and systems for noise reduction and image enhancement |
| US8538193B2 (en) * | 2010-09-28 | 2013-09-17 | Sharp Laboratories Of America, Inc. | Methods and systems for image enhancement and estimation of compression noise |
| US8532429B2 (en) | 2010-09-28 | 2013-09-10 | Sharp Laboratories Of America, Inc. | Methods and systems for noise reduction and image enhancement involving selection of noise-control parameter |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3432904B2 (ja) * | 1994-08-31 | 2003-08-04 | 三洋電機株式会社 | ブロック歪み検出装置 |
| JP4749377B2 (ja) * | 2006-04-18 | 2011-08-17 | パイオニア株式会社 | ブロックノイズ除去装置 |
-
2009
- 2009-05-22 JP JP2009123957A patent/JP5247591B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010273168A (ja) | 2010-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4649355B2 (ja) | ブロックノイズ検出方法及び装置並びにブロックノイズ低減方法及び装置 | |
| US10116909B2 (en) | Detecting a vertical cut in a video signal for the purpose of time alteration | |
| JP5276170B2 (ja) | バンディング・アーチファクトを検出する方法および装置 | |
| JP2011250472A (ja) | ブロック歪み除去方法およびブロック歪み除去装置 | |
| EP1223760A2 (en) | Mosquito noise reducing apparatus and method | |
| JP6300565B2 (ja) | 動画像符号化装置、プログラム、および、集積回路 | |
| CN104335565A (zh) | 采用具有自适应滤芯的细节增强滤波器的图像处理方法 | |
| JP4749377B2 (ja) | ブロックノイズ除去装置 | |
| JP2009527175A (ja) | 表示される画像における圧縮アーティファクトの低減、エンコードパラメータの解析 | |
| US9639919B2 (en) | Detection and correction of artefacts in images or video | |
| JP5247591B2 (ja) | 画像処理装置及びその制御方法 | |
| NO20190396A1 (en) | Isp bias-compensating noise reduction systems and methods | |
| US20080037893A1 (en) | Block noise removal device | |
| US20100322304A1 (en) | Multi-source filter and filtering method based on h.264 de-blocking | |
| US20070285729A1 (en) | Image processing apparatus and image processing method | |
| JP2007519338A (ja) | 映像フレームのエラー隠蔽装置および方法 | |
| JP2005012641A (ja) | ブロックノイズ検出装置及びそれを用いたブロックノイズ除去装置 | |
| JP2524044B2 (ja) | 画像符号化方法及び画像符号化装置 | |
| US8050508B2 (en) | Detecting method and system of compression-related noise levels | |
| US10419775B2 (en) | Moving image encoding apparatus, image capturing apparatus, moving image encoding method, and non-transitory computer readable storage medium | |
| JP5436082B2 (ja) | ノイズ低減装置及びノイズ低減方法 | |
| JP5039017B2 (ja) | ノイズレベル検出装置 | |
| KR20050013621A (ko) | 블록킹 아티팩트들 검출 방법 | |
| JP4227160B2 (ja) | ブロック歪み除去方法 | |
| TWI443605B (zh) | 影像信號像素點色彩值調整方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120514 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120514 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121211 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130409 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160419 Year of fee payment: 3 |