JP5058024B2 - DC / DC converter failure detection method - Google Patents
DC / DC converter failure detection method Download PDFInfo
- Publication number
- JP5058024B2 JP5058024B2 JP2008053166A JP2008053166A JP5058024B2 JP 5058024 B2 JP5058024 B2 JP 5058024B2 JP 2008053166 A JP2008053166 A JP 2008053166A JP 2008053166 A JP2008053166 A JP 2008053166A JP 5058024 B2 JP5058024 B2 JP 5058024B2
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- converter
- current
- output
- difference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/0038—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/04—Cutting off the power supply under fault conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/40—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for controlling a combination of batteries and fuel cells
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/10—DC to DC converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/52—Drive Train control parameters related to converters
- B60L2240/527—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/52—Drive Train control parameters related to converters
- B60L2240/529—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/547—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/549—Current
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Dc-Dc Converters (AREA)
Description
この発明は、DC/DCコンバータの故障検出方法に関し、より詳細には、前記DC/DCコンバータに設けられた電流センサや電圧センサ等の故障を検出可能なDC/DCコンバータの故障検出方法に関する。 The present invention relates to a failure detection method for a DC / DC converter, and more particularly to a failure detection method for a DC / DC converter capable of detecting a failure of a current sensor, a voltage sensor or the like provided in the DC / DC converter.
スイッチング素子を用いるいわゆるチョッパ制御により電圧変換を行うDC/DCコンバータを備える車両用電力システムが知られている(特許文献1)。特許文献1の車両用電力システムでは、アクセルペダルの踏込量と電流センサの出力を比較することにより電流センサの異常の有無を判定し、異常が有ると判定した場合、所定の通流率となるチョッパ信号を用いてトランジスタ(スイッチング素子)を制御する(特許文献1の図2のステップS10、S14、段落[0018]〜[0020]、[0026]、[0027]参照)。
A vehicle power system including a DC / DC converter that performs voltage conversion by so-called chopper control using a switching element is known (Patent Document 1). In the vehicle power system of
また、車両用電力システムを流れる電流を検出する電流センサとして、正常動作時に所定範囲の電圧を出力し、断線又は短絡が発生した異常動作時に前記所定範囲を外れた電圧を出力するものが知られている(特許文献2の図2、段落[0009]参照)。 Further, as a current sensor for detecting a current flowing through a vehicle power system, a sensor that outputs a voltage within a predetermined range during normal operation and outputs a voltage out of the predetermined range during abnormal operation when a disconnection or a short circuit occurs is known. (See FIG. 2, paragraph [0009] of Patent Document 2).
特許文献1では、アクセルペダルの踏込量と電流センサの出力とを比較するため、アクセルペダルの踏込量が変化しないと電流センサの異常を判定することができない。また、アクセルペダルの踏込量と電流センサの出力とは、一対一に対応するものではないため、精度も十分とはいえない。
In
特許文献2の方法では、断線や短絡が生じたときにのみ使用可能であり、電流センサ又は電圧センサの利得変化故障(センサの利得が許容範囲から外れる故障)やオフセット変化故障(センサの検出可能範囲に対応する出力可能範囲がずれる故障)に対応できない。
The method of
この発明はこのような課題を考慮してなされたものであり、常時監視が可能であり、精度がよく、電流センサ又は電圧センサの利得変化故障やオフセット変化故障にも対応可能なDC/DCコンバータの故障検出方法を提供することを目的とする。 The present invention has been made in consideration of such problems, and is a DC / DC converter that can be constantly monitored, has high accuracy, and can cope with a gain change fault or an offset change fault of a current sensor or a voltage sensor. An object of the present invention is to provide a fault detection method.
この発明に係るDC/DCコンバータの故障検出方法は、DC/DCコンバータへの入力電流と入力電圧の積から入力電力を計算し、前記DC/DCコンバータからの出力電流と出力電圧の積から出力電力を計算し、前記DC/DCコンバータで発生する推定損失を設定し、前記入力電力と、前記出力電力及び前記推定損失の和との差又は比を計算し、この差又は比と、予め記憶した所定の閾値とを比較し、前記差又は比と前記所定の閾値との偏差に基づいて、前記入力電流又は前記出力電流を測定する前記DC/DCコンバータの電流センサが故障しているかどうかを判定することを特徴とする。 The failure detection method for a DC / DC converter according to the present invention calculates input power from the product of input current and input voltage to the DC / DC converter, and outputs from the product of output current and output voltage from the DC / DC converter. Power is calculated, an estimated loss generated in the DC / DC converter is set, a difference or ratio between the input power and the sum of the output power and the estimated loss is calculated, and this difference or ratio is stored in advance. Whether the current sensor of the DC / DC converter that measures the input current or the output current has failed based on the difference between the difference or ratio and the predetermined threshold. It is characterized by determining.
この発明では、入力電力と、出力電力及びDC/DCコンバータの推定損失の和との差又は比を用いてDC/DCコンバータの電流センサの故障を判定する。理想的には、入力電力と、出力電力及びDC/DCコンバータの推定損失の和とは等しくなるため、前記差は常にゼロになり、前記比は常に1:1となる。従って、前記差又は比と予め記憶した所定の閾値との偏差に基づいて、電流センサの出力異常を常時且つ高精度に判定することができる。その結果、電流センサの利得変化故障やオフセット変化故障等、DC/DCコンバータの故障を容易に検出することができる。 In the present invention, the failure of the current sensor of the DC / DC converter is determined by using the difference or ratio between the input power and the sum of the output power and the estimated loss of the DC / DC converter. Ideally, since the input power is equal to the sum of the output power and the estimated loss of the DC / DC converter, the difference is always zero and the ratio is always 1: 1. Therefore, the output abnormality of the current sensor can be determined constantly and with high accuracy based on the deviation between the difference or ratio and the predetermined threshold value stored in advance. As a result, it is possible to easily detect a failure of the DC / DC converter such as a gain change failure or an offset change failure of the current sensor.
上記において、現在のデューティ比を検知し、前記入力電圧と前記出力電圧との比を計算し、前記比と前記デューティ比との差又は比を計算し、この差又は比と、予め記憶した所定の第2閾値とを比較し、前記差又は比と前記第2閾値との偏差に基づいて、前記入力電圧又は前記出力電圧を測定する前記DC/DCコンバータの電圧センサが故障しているかどうかを判定することができる。 In the above, the current duty ratio is detected, the ratio between the input voltage and the output voltage is calculated, the difference or ratio between the ratio and the duty ratio is calculated, and this difference or ratio is stored in advance as a predetermined value. Whether the voltage sensor of the DC / DC converter that measures the input voltage or the output voltage is faulty based on the difference between the second threshold value and the difference or ratio and the second threshold value. Can be determined.
また、前記電流センサが故障していると判定した場合、該電流センサの測定値を用いて前記入力電流又は前記出力電流を制御する動作モードを禁止することが好ましい。 In addition, when it is determined that the current sensor has failed, it is preferable to prohibit an operation mode in which the input current or the output current is controlled using a measured value of the current sensor.
さらに、前記入力電流又は前記出力電流と、前記入力電圧と、前記出力電圧とに基づいて前記推定損失を設定することができる。 Furthermore, the estimated loss can be set based on the input current or the output current, the input voltage, and the output voltage.
この発明では、入力電力と、出力電力及びDC/DCコンバータの推定損失の和との差又は比を用いてDC/DCコンバータの電流センサの故障を判定する。理想的には、入力電力と、出力電力及びDC/DCコンバータの推定損失の和とは等しくなるため、前記差は常にゼロになり、前記比は常に1:1となる。従って、前記差又は比と予め記憶した所定の閾値との偏差に基づいて、電流センサの出力異常を常時且つ高精度に判定することができる。その結果、電流センサの利得変化故障やオフセット変化故障等、DC/DCコンバータの故障を容易に検出することができる。 In the present invention, the failure of the current sensor of the DC / DC converter is determined by using the difference or ratio between the input power and the sum of the output power and the estimated loss of the DC / DC converter. Ideally, since the input power is equal to the sum of the output power and the estimated loss of the DC / DC converter, the difference is always zero and the ratio is always 1: 1. Therefore, the output abnormality of the current sensor can be determined constantly and with high accuracy based on the deviation between the difference or ratio and the predetermined threshold value stored in advance. As a result, it is possible to easily detect a failure of the DC / DC converter such as a gain change failure or an offset change failure of the current sensor.
A.一実施形態
以下、この発明に係るDC/DCコンバータの故障検出方法の一実施形態を実施可能な車両用電力システムについて図面を参照して説明する。
A. EMBODIMENT OF THE INVENTION Hereinafter, the electric power system for vehicles which can implement one Embodiment of the failure detection method of the DC / DC converter which concerns on this invention is demonstrated with reference to drawings.
1.車両用電力システム20の構成
(1)全体構成
図1は、この実施形態に係るDC/DCコンバータの故障検出方法を実施可能な車両用電力システム20の回路図である。車両用電力システム20は、燃料電池車両等の車両に搭載可能であり、基本的には、燃料電池22とエネルギストレージである蓄電装置(バッテリという。)24とから構成されるハイブリッド型の電力装置と、このハイブリッド型の電力装置から電流(電力)がインバータ34を通じて供給される走行用のモータ26と、バッテリ24が接続される1次側1Sと、燃料電池22とモータ26(インバータ34)とが接続される2次側2Sとの間で電圧変換を行うDC/DCコンバータ装置{VCU(Voltage Control Unit)という。}23とから構成される。モータ26の回転は、減速機12、シャフト14を通じて車輪16に伝達される。
1. Configuration of Vehicle Power System 20 (1) Overall Configuration FIG. 1 is a circuit diagram of a vehicle power system 20 that can implement a DC / DC converter failure detection method according to this embodiment. The vehicle power system 20 can be mounted on a vehicle such as a fuel cell vehicle, and is basically a hybrid power device including a
(2)燃料電池22
燃料電池22は、例えば固体高分子電解質膜をアノード電極とカソード電極とで両側から挟み込んで形成されたセルを積層したスタック構造にされている。燃料電池22には、水素タンク28とエアコンプレッサ30が配管により接続されている。水素タンク28内の加圧水素は、燃料電池22のアノードに供給される。また、エアコンプレッサ30により空気が燃料電池22のカソードに供給される。燃料電池22内で反応ガスである水素(燃料ガス)と空気(酸化剤ガス)の電気化学反応により発電電流Ifが生成される。発電電流Ifは、電流センサ32及びダイオード(ディスコネクトダイオードともいう。)33を介して、インバータ34及び(又は)VCU23のDC/DCコンバータ36に供給される。
(2)
The
(3)バッテリ24
1次側1Sに接続されるバッテリ24は、例えばリチウムイオン2次電池やニッケル水素2次電池又はキャパシタを利用することができる。この実施形態ではリチウムイオン2次電池を利用している。バッテリ24は、VCU23のDC/DCコンバータ36を通じてインバータ34にモータ電流Imを供給する。
(3)
As the
(4)インバータ34
インバータ34は、直流/交流変換を行い、モータ電流Imをモータ26に供給する一方、回生動作に伴う交流/直流変換後のモータ電流Imを2次側2SからDC/DCコンバータ36を通じて1次側1Sに供給する。この場合、回生電圧又は燃料電池22の発電電圧Vfである2次電圧V2がDC/DCコンバータ36により低電圧に変換された1次電圧V1は、バッテリ電流Ibatとしてバッテリ24を充電する。
(4)
The
(5)VCU23
VCU23は、DC/DCコンバータ36と、これを駆動制御するコンバータ制御部54とから構成される。
(5) VCU23
The VCU 23 includes a DC /
DC/DCコンバータ36は、バッテリ24(第1電力装置)と第2電力装置{燃料電池22又は回生電源(インバータ34とモータ26)}との間に、それぞれIGBT等のスイッチング素子からなる上アーム素子81と、下アーム素子82とからなる相アームUAを有している。上アーム素子81及び下アーム素子82には、それぞれ、逆方向にダイオード83、84が接続されている。
The DC /
DC/DCコンバータ36により1次電圧V1と2次電圧V2との間で電圧を変換する際に、エネルギを放出及び蓄積するリアクトル90が、相アームUAの中点の共通接続点とバッテリ24との間に挿入されている。
When the DC /
上アーム素子81は、コンバータ制御部54から出力されるゲートの駆動信号(駆動電圧)UH(のハイレベル)によりそれぞれ駆動にされ、下アーム素子82は、ゲートの駆動信号(駆動電圧)UL(のハイレベル)によりそれぞれ駆動にされる。
The
コンバータ制御部54は、DC/DCコンバータ36の動作を制御する。制御の方法については後述する。また、コンバータ制御部54は、後述する電圧センサ故障判定閾値THr及び電流センサ故障判定閾値THwを記憶したメモリ58を有する。
The
(6)コンデンサ38、39
1次側1S及び2次側2Sには、それぞれ平滑用のコンデンサ38、39が設けられている。
(6)
(7)各種制御部(FC制御部50、モータ制御部52、コンバータ制御部54、統括制御部56)
燃料電池22、水素タンク28及びエアコンプレッサ30を含むシステムはFC制御部50により制御される。インバータ34とモータ26を含むシステムはインバータ駆動部(図示せず)を含むモータ制御部52により制御される。上述の通り、DC/DCコンバータ36を含むシステムはコンバータ制御部54により制御される。
(7) Various control units (
The system including the
そして、これらFC制御部50、モータ制御部52、及びコンバータ制御部54は、上位の制御部であり燃料電池22の総負荷量Lt等の値を決定する統括制御部56により制御される。
The
統括制御部56は、燃料電池22の状態、バッテリ24の状態、及びモータ26の状態の他、各種スイッチ及び各種センサからの入力(負荷要求)に基づき決定した車両用電力システム20の総負荷要求量Ltから、燃料電池22が負担すべき燃料電池分担負荷量(要求出力)Lfと、バッテリ24が負担すべきバッテリ分担負荷量(要求出力)Lbと、回生電源が負担すべき回生電源分担負荷量Lrの配分(分担)を調停しながら決定し、FC制御部50、モータ制御部52及びコンバータ制御部54に指令を送出する。
The
統括制御部56、FC制御部50、モータ制御部52、及びコンバータ制御部54は、それぞれCPU、ROM、RAM、タイマの他、A/D変換器、D/A変換器等の入出力インタフェース、並びに、必要に応じてDSP(Digital Signal Processor)等を有している。
The
統括制御部56、FC制御部50、モータ制御部52、及びコンバータ制御部54は、車内LANであるCAN(Controller Area Network)等の通信線70を通じて相互に接続され、各種スイッチ及び各種センサからの入出力情報を共有し、これら各種スイッチ及び各種センサからの入出力情報を入力として各CPUが各ROMに格納されたプログラムを実行することにより各種機能を実現する。
The
(8)各種スイッチ、各種センサ
車両状態を検出する各種スイッチ及び各種センサとしては、発電電流Ifを検出する電流センサ32の他、1次電圧V1(基本的にバッテリ電圧Vbatに等しい。)を検出する電圧センサ61、1次電流I1を検出する電流センサ62、2次電圧V2(ディスコネクトダイオード33が導通しているとき、略燃料電池22の発電電圧Vfに等しい。)を検出する電圧センサ63、2次電流I2を検出する電流センサ64、通信線70に接続されるイグニッションスイッチ65、アクセルセンサ66、ブレーキセンサ67、車速センサ68、及び補機(図示せず)の操作部55等がある。電圧センサ61、63及び電流センサ32、62、64の出力は、コンバータ制御部54に入力される。
(8) Various switches and various sensors As various switches and various sensors for detecting the vehicle state, the primary voltage V1 (which is basically equal to the battery voltage Vbat) is detected in addition to the
2.各種制御/処理
(1)VCU23における基本的な電圧制御
図2には、コンバータ制御部54により駆動制御されるDC/DCコンバータ36の基本動作のフローチャートが示されている。
2. Various Controls / Processing (1) Basic Voltage Control in
上述したように、統括制御部56は、燃料電池22の状態、バッテリ24の状態、及びモータ26の状態の他、各種スイッチ及び各種センサからの入力(負荷要求)に基づき決定した車両用電力システム20の総負荷要求量Ltから、燃料電池22が負担すべき燃料電池分担負荷量(要求出力)Lfと、バッテリ24が負担すべきバッテリ分担負荷量(要求出力)Lbと、回生電源が負担すべき回生電源分担負荷量Lrの配分(分担)を調停しながら決定し、FC制御部50、モータ制御部52及びコンバータ制御部54に指令を送出する。
As described above, the
ステップS1において、統括制御部56により、それぞれが負荷要求であるモータ26の電力要求とエアコンプレッサ30の電力要求と図示しない補機の電力要求とから総負荷要求量Ltが決定(算出)されると、ステップS2において、統括制御部56は、決定した総負荷要求量Ltを出力するための燃料電池分担負荷量Lfと、バッテリ分担負荷量Lbと、回生電源分担負荷量Lrの配分を決定する。ここで、燃料電池分担負荷量Lfを決定する場合、燃料電池22の効率η(図3)が考慮される。
In step S1, the
次いで、ステップS3において、コンバータ制御部54により、燃料電池分担負荷量Lfに応じて燃料電池22の発電電圧Vf、ここでは、2次電圧V2が決定される。
Next, in step S3, the
2次電圧V2が決定されると、ステップS4において、コンバータ制御部54は、決定した2次電圧V2となるようにDC/DCコンバータ36を駆動制御する。そして、DC/DCコンバータ36は、いわゆる昇圧チョッパ動作、降圧チョッパ動作等を行う。このように、2次電圧V2の目標値(目標2次電圧V2tar)と、電圧センサ63で検出される2次電圧Vとを一致させるようにDC/DCコンバータ36を制御する動作モードを、以下では「V2制御モード」と称する。
When the secondary voltage V2 is determined, in step S4, the
2次電圧V2及び1次電圧V1は、コンバータ制御部54によりDC/DCコンバータ36をフィードフォワード制御とフィードバック制御とを組み合わせたPID制御により制御される。
The secondary voltage V <b> 2 and the primary voltage V <b> 1 are controlled by the
(2)燃料電池22の出力制御
次に、VCU23による燃料電池22の出力制御について説明する。
(2) Output Control of
水素タンク28からの燃料ガス及びエアコンプレッサ30からの圧縮空気が供給されている発電時に、燃料電池22の発電電流Ifは、図3に示した特性91{関数F(Vf)という。}上で2次電圧V2、すなわち発電電圧Vfをコンバータ制御部54によりDC/DCコンバータ36を通じて設定することにより決定される。つまり、発電電流Ifは、発電電圧Vfの関数F(Vf)値として決定される。If=F(Vf)であり、例えば発電電圧VfをVf=Vfa=V2と設定すれば、その発電電圧Vfa(V2)の関数値としての発電電流Ifaが決定される。{Ifa=F(Vfa)=F(V2)}。
During power generation in which fuel gas from the
このように燃料電池22は二次電圧V2(発電電圧Vf)を決定することにより発電電流Ifが決定されるので、車両用電力システム20を駆動制御する際には、2次電圧V2(発電電圧Vf)が目標電圧(目標値)に設定される。
As described above, since the
車両用電力システム20等燃料電池22を含むシステムでは、基本的に、DC/DCコンバータ36の2次側2Sの2次電圧V2が目標電圧となるようにVCU23が制御され、このVCU23により燃料電池22の出力(発電電流If)が制御される。
In the system including the
(3)VCU23における例外的な制御
上述の通り、VCU23では、V2制御モード(目標2次電圧V2tarと、電圧センサ63で検出される2次電圧Vとを一致させるようにDC/DCコンバータ36を制御する動作モード)が基本的に用いられる。このV2制御モードに加え、以下のようなモードも用いられる。
(3) Exceptional control in the
(a)I1制御モード
例えば、1次側1Sに過電流が発生した場合、すなわち、電流センサ62で検出された1次電流I1が、過電流の発生を示す閾値(過電流閾値THoc[A])を超えている場合、1次電流I1を過電流閾値THoc以下になるようにDC/DCコンバータ36を制御することが可能である。このように、1次電流I1の目標値(目標1次電流I1tar)を設定し、電流センサ62で検出される1次電流I1を目標1次電流I1tar以下に制限するようにDC/DCコンバータ36を制御する動作モードを「I1制御モード」と称する。
(A) I1 control mode For example, when an overcurrent occurs on the
(b)V1制御モード
例えば、バッテリ24から供給するバッテリ電流Ibatの制御等を目的として、2次電圧V2を1次電圧V1と等しくなるようにDC/DCコンバータ36を制御することが可能である。このように、1次電圧V1の目標値(目標1次電圧V1tar)を設定し、電圧センサ61で検出される1次電圧V1を目標1次電圧V1tarと一致させるようにDC/DCコンバータ36を制御する動作モードを「V1制御モード」と称する。
(B) V1 Control Mode For example, for the purpose of controlling the battery current Ibat supplied from the
(4)DC/DCコンバータ36のスイッチング制御
(a)概要
本実施形態におけるDC/DCコンバータ36のスイッチング制御としては、(i)各スイッチング周期Tsw[μs]の一部において上アーム素子81を駆動する降圧チョッパ制御と、(ii)各スイッチング周期Tswの一部において下アーム素子82を駆動する昇圧チョッパ制御と、(iii)降圧チョッパ処理及び昇圧チョッパ処理のいずれも行わずにDC/DCコンバータ36に電流を流す直結制御と、(iv)DC/DCコンバータ36に電流を流さない停止制御とがある。
(4) Switching Control of DC / DC Converter 36 (a) Outline As switching control of the DC /
(b)同期スイッチング処理
図4及び図5に示すように、降圧チョッパ制御と昇圧チョッパ制御は、各スイッチング周期Tswにおいて組み合わせて用いられる。すなわち、各スイッチング周期Tswでは、上アーム素子81の駆動時間(以下、「上アーム素子駆動時間T1」とも称する。)と、下アーム素子82の駆動時間(以下、「下アーム素子駆動時間T2」とも称する。)の両方が現れ、上アーム素子81と下アーム素子82とを交互に駆動する。このように、スイッチング周期Tsw毎に上アーム素子81と下アーム素子82とを交互に駆動する処理を同期スイッチング処理と称する。本実施形態の同期スイッチング処理は、例えば、国際公開第02/093730号パンフレットに記載されているのと同様の処理を用いることができる。
(B) Synchronous switching process As shown in FIGS. 4 and 5, the step-down chopper control and the step-up chopper control are used in combination in each switching period Tsw. That is, in each switching cycle Tsw, the driving time of the upper arm element 81 (hereinafter also referred to as “upper arm element driving time T1”) and the driving time of the lower arm element 82 (hereinafter referred to as “lower arm element driving time T2”). Both appear, and the
また、上アーム素子駆動時間T1と下アーム素子駆動時間T2との間には、上アーム素子81と下アーム素子82とを同時に駆動して2次電圧V2が短絡することを防止するためのデッドタイムdtが配置されている。
Further, a dead time for preventing the secondary voltage V2 from being short-circuited by simultaneously driving the
同期スイッチング処理では、スイッチング周期Tsw毎に上アーム素子81と下アーム素子82とを交互に駆動するものの、1次側1Sと2次側2Sの間の電位差の関係上、通常は、その一方のみしかオンしない(電流が流れない)。
In the synchronous switching process, although the
図4には、降圧チョッパ制御により、上アーム素子81がオンし、下アーム素子82がオンしない状態が示されている。図5には、昇圧チョッパ制御により、下アーム素子82がオンし、上アーム素子81がオンしない状態が示されている。図4及び図5において、駆動信号UH、ULの波形中、ハッチングを付けた期間は、駆動信号UH、ULが供給されているアーム素子(例えば、駆動信号UHに対応するアーム素子は上アーム素子81)がオンしている期間(実際に電流が流れている期間)を示している。
FIG. 4 shows a state where the
また、図4及び図5の下側には、VCU23の降圧動作時の1次電流I1のタイムチャートが示されている。図4及び図5中、リアクトル90に流れる1次電流I1の符号は、1次側1Sから2次側2Sへ流れる昇圧時電流(DC/DCコンバータ23の2次側2Sからインバータ34へ流れ出す電流)を正(+)、2次側2Sから1次側1Sへ流れる降圧時電流(燃料電池22又はインバータ34から2次側2Sへ流れ込む電流)を負(−)に取っている。
4 and 5 show time charts of the primary current I1 during the step-down operation of the
本実施形態では、1スイッチング周期Tswにおいて上アーム素子駆動時間T1が占める割合をデューティ比DUTと定義する(DUT=T1/Tsw)。ここで、V2制御モードにおけるデューティ比DUTは、電圧センサ61で検出した1次電圧V1を目標2次電圧V2tarで除したもの(V1/V2tar)として定義可能である(DUT=V1/V2tar)。また、一般に、デッドタイムdtがスイッチング周期Tswに占める割合は小さいものであるため、1スイッチング周期Tswにおいて下アーム素子駆動時間T2が占める割合は、「1−DUT」及び「1−(V1/V2tar)」として表現可能である。
In the present embodiment, the ratio of the upper arm element driving time T1 in one switching cycle Tsw is defined as the duty ratio DUT (DUT = T1 / Tsw). Here, the duty ratio DUT in the V2 control mode can be defined as a value obtained by dividing the primary voltage V1 detected by the
(5)電圧センサ61、63及び電流センサ62、64の故障判定
図6には、DC/DCコンバータ36(電圧センサ61、63及び電流センサ62、64)の故障判定を行うフローチャートが示されている。
(5) Failure determination of
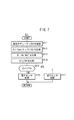
ステップS11において、コンバータ制御部54は、電圧センサ61、63に故障が発生していないかどうかを判定する。具体的には、図7に示すフローチャートに基づいて判定する。なお、図7のフローチャートは、降圧チョッパ制御を前提とする。
In step S <b> 11,
ステップS111において、コンバータ制御部54は、現在のデューティ比DUTを確認する。現在のデューティ比DUTは、統括制御部56から通知された燃料電池分担負荷量Lfに応じて決定された燃料電池22の発電電圧Vf(2次電圧V2)に基づいて算出される。
In step S111,
ステップS112において、コンバータ制御部54は、入力電圧Vin(2次電圧V2)と出力電圧Vout(1次電圧V1)の比の値Rv(=Vout/Vin=V1/V2)を計算する。ここで、上述の通り、V2制御モードにおけるデューティ比DUTは、電圧センサ61で検出した1次電圧V1を目標2次電圧V2tarで除したもの(V1/V2tar)として定義可能である(DUT=V1/V2tar)。また、目標2次電圧V2tarと、電圧センサ63で検出した2次電圧V2とは略等しいものとなることが期待される。このため、デューティ比DUTと、電圧センサ61で検出した1次電圧V1を電圧センサ63で検出した2次電圧V2で除したもの(V1/V2)、すなわち、上記比の値Rvとは略等しくなる(DUT≒Rv)。
In step S112,
続くステップS113において、コンバータ制御部54は、比の値Rvと、デューティ比DUTとの差Dr(=Rv−DUT)を計算する。上述の通り、理論的には、比の値Rvと、デューティ比DUTとは略等しくなるため、差Drはゼロ又はゼロに非常に近い値となるはずである。
In subsequent step S113,
ステップS114において、コンバータ制御部54は、差Drと、メモリ58に記憶されている電圧センサ故障判定閾値THr(以下、「故障判定閾値THr」とも称する。)とを比較する。故障判定閾値THrは、電圧センサ61、63の故障を判定するための正の実数である。上述の通り、理論的には、差Drはゼロ又はゼロに非常に近い値となるため、差Drがゼロから離れた値であれば、電圧センサ61、63の少なくとも一方が故障しているものと判断できる。このため、電圧センサ61、63が正常に動作している場合に取り得ない値を故障判定閾値THrとして設定しておき、差Drと故障判定閾値THrとを比較することで電圧センサ61、63の故障を判定できる。故障判定閾値THrは、例えば、故障の検出精度や許容誤差、誤判定の可能性に基づいて決定される。一般に、故障判定閾値THrを小さくすると、故障の検出精度が上がり、許容誤差が小さくなるが、誤判定の可能性は高くなる。また、故障判定閾値THrを大きくすると、故障の検出精度が下がり、許容誤差が大きくなるが、誤判定の可能性は低くなる。
In step S114,
ステップS115において、差Drの絶対値が、故障判定閾値THrの絶対値未満である場合(S115:No)、ステップS116において、コンバータ制御部54は、電圧センサ61、63のいずれも正常である(出力に異常がない)と判定する。差Drの絶対値が故障判定閾値THrの絶対値以上である場合(S115:Yes)、ステップS117において、コンバータ制御部54は、電圧センサ61、63のいずれかが故障している(出力に異常がある)と判定する。
In step S115, when the absolute value of difference Dr is less than the absolute value of failure determination threshold value THr (S115: No), in step S116,
図6に戻り、ステップS12において、コンバータ制御部54は、ステップS11での判定結果に基づいて、電圧センサ61、63が故障しているかどうかを判定する。電圧センサ61、63の少なくとも一方が故障している場合(S12:Yes)、ステップS13において、コンバータ制御部54は、V2制御モード及びV1制御モードを禁止し、I1制御モードによりDC/DCコンバータ36を動作させる。加えて、電圧センサ61、63の少なくとも一方が故障していることを示す信号(電圧センサ故障信号Svor)を統括制御部56に送信する。電圧センサ故障信号Svorを受信した統括制御部56は、I1制御モードを前提とした制御を行うと共に、電圧センサ61、63の少なくとも一方が故障している旨を図示しない表示装置に表示する。なお、電圧センサ61、63の予備を予め設けておき、電圧センサ61、63の少なくとも一方が故障していることを検出したとき、予備の電圧センサを用いることも可能である。
Returning to FIG. 6, in step S <b> 12,
ステップS12に戻り、電圧センサ61、63の両方が故障していない場合(S12:No)、ステップS14において、コンバータ制御部54は、電流センサ62、64に故障が発生していないかどうかを判定する。具体的には、図8に示すフローチャートに基づいて判定する。なお、図8のフローチャートは、降圧チョッパ制御及び昇圧チョッパ制御のいずれにも利用可能である。
Returning to step S12, if both of the
ステップS141において、コンバータ制御部54は、入力電圧Vinと入力電流Iinとを乗算して入力電力Winを計算する(Win=Vin×Iin)。降圧チョッパ制御を用いている場合、2次電圧V2が入力電圧Vinであり、2次電流I2が入力電流Iinである。昇圧チョッパ制御を用いている場合、1次電圧V1が入力電圧Vinであり、1次電流I1が入力電流Iinである。
In step S141,
ステップS142において、コンバータ制御部54は、出力電圧Voutと、出力電流Ioutとを乗算して出力電力Woutを計算する(Wout=Vout×Iout)。降圧チョッパ制御を用いている場合、1次電圧V1が出力電圧Voutであり、1次電流I1が出力電流Ioutである。昇圧チョッパ制御を用いている場合、2次電圧V2が出力電圧Voutであり、2次電流I2が出力電流Ioutである。
In step S142,
ステップS143において、コンバータ制御部54は、DC/DCコンバータ36で発生する推定損失Lcon[W]を設定する。本実施形態において、推定損失Lconは、入力電圧Vinと、出力電圧Voutと、出力電流Ioutとに基づいて推定損失Lconを設定する。この際、図9に示すような内部損失マップ59が用いられる。内部損失マップ59は、降圧チョッパ制御時にDC/DCコンバータ36内で発生する損失をマップ化したものである。内部損失マップ59を用いる代わりに、1つ又は複数の固定値を推定損失Lconとして用いてもよい。
In step S143,
ステップS144において、コンバータ制御部54は、入力電力Winと、出力電力Wout及び推定損失Lconの和との差Dw{=Win−(Wout+Lcon)}[W]を計算する。この差Dwは、理想的にはゼロとなる。
In step S144,
ステップS145において、コンバータ制御部54は、差Dwと、メモリ58に記憶されている電流センサ故障判定閾値THw[W](以下、「故障判定閾値THw」とも称する。)とを比較する。故障判定閾値THwは、電流センサ62、64の故障を判定するための正の実数である。上述の通り、理想的には、差Dwはゼロとなるため、差Drがゼロから離れた値であれば、電流センサ62、64の少なくとも一方が故障しているものと判断できる。このため、電流センサ62、64が正常に動作している場合に取り得ない値を故障判定閾値THwとして設定しておき、差Dwと故障判定閾値THwとを比較することで電流センサ62、64の故障を判定できる。故障判定閾値THwは、例えば、故障の検出精度や許容誤差、誤判定の可能性に基づいて決定される。一般に、故障判定閾値THwを小さくすると、故障の検出精度が上がり、許容誤差が小さくなるが、誤判定の可能性は高くなる。また、故障判定閾値THwを大きくすると、故障の検出精度が下がり、許容誤差が大きくなるが、誤判定の可能性は低くなる。
In step S145,
ステップS146において、差Dwの絶対値が、故障判定閾値THwの絶対値未満である場合(S146:No)、ステップS147において、コンバータ制御部54は、電流センサ62、64のいずれも正常である(出力に異常がない)と判定する。差Dwの絶対値が故障判定閾値THwの絶対値以上である場合(S146:Yes)、ステップS148において、コンバータ制御部54は、電流センサ62、64のいずれかが故障している(出力に異常がある)と判定する。
If the absolute value of the difference Dw is less than the absolute value of the failure determination threshold value THw in step S146 (S146: No), in step S147, the
図6に戻り、ステップS15において、コンバータ制御部54は、ステップS14での判定結果に基づいて、電流センサ62、64が故障しているかを判定する。電流センサ62、64の両方が故障していない場合(S15:No)、ステップS16において、コンバータ制御部54は、通常の制御を行う。電流センサ62、64の少なくとも一方が故障している場合(S15:Yes)、ステップS17において、コンバータ制御部54は、I1制御モードを禁止し、V2制御モード又はV1制御モードを用いる。なお、電流センサ62、64の予備を予め設けておき、電流センサ62、64の少なくとも一方が故障していることを検出したとき、予備の電流センサを用いることも可能である。
Returning to FIG. 6, in step S <b> 15,
(6)電圧センサ61、63の故障判定のための回路構成
図10には、図7のフローチャート(電圧センサ61、63の故障検出)を実現するための回路構成の一例が示されている。除算器72において、電圧センサ63で検出された2次電圧V2を、電圧センサ61で検出された1次電圧V1により除算し、比の値Rv(=V1/V2)を算出する(図7のS112)。
(6) Circuit Configuration for Determining Failure of
次いで、第1減算器74において、除算器72で算出した比の値Rvから、コンバータ制御部54で算出したデューティ比DUTを差し引いて差Dr(=Rv−DUT)を算出する。差Drは、第1比較器76に入力される(S113)。この第1比較器76には、コンバータ制御部54のメモリ58に記憶されている電圧センサ故障判定閾値THrも入力される。そして、第1比較器76では、差Drと故障判定閾値THrとが比較され(S114)、差Drが故障判定閾値THr未満である場合、電圧センサ61、63のいずれにも異常がないことを示す「0」が第1比較器76から出力される(S115:No)。差Drが故障判定閾値THr以上である場合、電圧センサ61、63のいずれか一方に異常があること(より具体的には、電圧センサ61の値が過大であるか又は電圧センサ63の値が過小であるか)を示す「1」が第1比較器76から出力される(S115:Yes)。
Next, the
第1減算器74で算出された差Drは、第2比較器78にも入力される。また、第1乗算器80において「−1」が乗算された故障判定閾値THr(以下、「負の故障判定閾値−THr」と称する。)も第2比較器78に入力される。そして、第2比較器78では、差Drと、負の故障判定閾値−THrとが比較される(S114)。差Drが負の故障判定閾値−THrより大きい場合、電圧センサ61、63のいずれにも異常がないことを示す「0」が第2比較器78から出力される(S115:No)。差Drが負の故障判定閾値−THr以下の場合、電圧センサ61、63のいずれか一方に異常があること(より具体的には、電圧センサ61の値が過小であるか又は電圧センサ63の値が過大であるか)を示す「1」が第2比較器78から出力される(S115:Yes)。
The difference Dr calculated by the
(7)電流センサ62、64の故障判定のための回路構成
図11には、図8のフローチャート(電流センサ62、64の故障検出)を実現するための回路構成の一例が示されている。第2乗算器86において、出力電圧Voutと、出力電流Ioutとが乗算され、出力電力Wout(=Vout×Iout)が算出される(図8のS142)。この出力電力Woutは、加算器88に入力される。
(7) Circuit Configuration for Determining Failure of
また、内部損失マップ59(図9参照)等の内部損失マップを用いて、出力電流Ioutと、入力電圧Vinと、出力電圧Voutとに基づいて、DC/DCコンバータ36で発生する推定損失Lconが選択される(図8のS143)。推定損失Lconも加算器88に入力される。そして、加算器88において、出力電力Woutと推定損失Lconとが加算され、和S1(=Wout+Lcon)が算出される。この和S1は、第2減算器92及び第3減算器94に入力される。
Further, the estimated loss Lcon generated in the DC /
第3乗算器96において、入力電圧Vinと入力電流Iinとが乗算され、入力電力Win(=Vin×Iin)が算出される(S141)。この2次電力W2は、第2減算器92及び第3減算器94に入力される。
In the
第2減算器92では、入力電力Winから和S1(=Wout+Lcon)が差し引かれ、差Dw{=Win―(Wout+Lcon)}が算出される(S144)。この差Dwは、第3比較器98に入力される。第3比較器98には、コンバータ制御部54のメモリ58に記憶されている電流センサ故障判定閾値THwも入力される。そして、第3比較器98では、差Dwと故障判定閾値THwとが比較され(S145)、差Dwが故障判定閾値THw以下である場合、電流センサ62、64のいずれにも異常がないことを示す「0」が第3比較器98から出力される(S146:No)。差Dwが故障判定閾値THwより大きい場合、電流センサ62、64のいずれか一方に異常があること(より具体的には、出力電流Ioutの値が過小であるか又は入力電流Iinの値が過大であるか)を示す「1」が第3比較器98から出力される(S146:Yes)。
In the
第3減算器94では、和S1から入力電力Winからが減算され、差Dwをマイナスにしたもの(以下、単に「差―Dw」と称する。){=(Wout+Lcon)―Win}が算出される(S144)。この差−Dwは、第4比較器100に入力される。第4比較器100には、故障判定閾値THwも入力される。そして、第4比較器100では、差−Dwと故障判定閾値THwとが比較され(S145)、差−Dwが故障判定閾値THw以上である場合、電流センサ62、64のいずれにも異常がないことを示す「0」が第4比較器100から出力される(S146:No)。差−Dwが故障判定閾値THwより小さい場合、電流センサ62、64のいずれか一方に異常があること(より具体的には、出力電流Ioutの値が過大であるか又は入力電流Iinの値が過小であるか)を示す「1」が第4比較器100から出力される(S146:Yes)。
In the
3.本実施形態の効果
以上のように、本実施形態では、入力電力Winと、出力電力Wout及び推定損失Lconとの差Dwを用いて電流センサ62、64の故障を判定する。理想的には、入力電力Winと、出力電力Wout及び推定損失Lconの和とは等しくなるため、差Dwは常にゼロになる。従って、差Dwと電流センサ故障判定閾値THwとの偏差に基づいて、電流センサ62、64の出力異常を常時且つ高精度に判定することができる。その結果、電流センサ62、64の利得変化故障やオフセット変化故障等の故障を容易に検出することができる。
3. As described above, in the present embodiment, the failure of the
また、本実施形態では、2次電圧V2と1次電圧V1の比の値Rvと、現在のデューティ比DUTとの差Drを用いて電圧センサ61、63の故障を判定する。降圧チョッパ制御では、理想的には、比の値Rvと、現在のデューティ比DUTとは等しくなるため、差Drは常にゼロになる。従って、差Drと電圧センサ故障判定閾値THrとの偏差に基づいて、電圧センサ61、63の出力異常を常時且つ高精度に判定することができる。その結果、電圧センサ61、63の利得変化故障やオフセット変化故障等の故障を容易に検出することができる。
In the present embodiment, the failure of the
本実施形態では、電流センサ62、64が故障していると判定した場合(図6のS15:Yes)、I1制御モードを禁止する(S17)。これにより、故障していると判定された電流センサ62、64の測定値の利用を停止し、DC/DCコンバータ36をより適切に動作制御することができる。
In this embodiment, when it determines with the
本実施形態では、出力電流Ioutと、入力電圧Vinと、出力電圧Voutとに基づいて推定損失Lconを設定する(図8のS143)。これにより、推定損失Lconをきめ細かく設定可能となり、その結果、電流センサ62、64の故障判定をより精度良く行うことができる。
In the present embodiment, the estimated loss Lcon is set based on the output current Iout, the input voltage Vin, and the output voltage Vout (S143 in FIG. 8). Thereby, the estimated loss Lcon can be set finely, and as a result, the failure determination of the
B.変形例
なお、この発明は、上記実施形態に限らず、この明細書の記載内容に基づき、種々の構成を採り得ることはもちろんである。例えば、以下の(1)〜(4)の構成を採用することができる。
B. Modifications It should be noted that the present invention is not limited to the above-described embodiment, and it is needless to say that various configurations can be adopted based on the contents described in this specification. For example, the following configurations (1) to (4) can be employed.
(1)DC/DCコンバータ36
上記実施形態では、DC/DCコンバータ36を燃料電池車両に搭載したが、これに限られない。例えば、バッテリ駆動車両(電気自動車)に搭載することもできる。もちろん、エンジンとバッテリとモータを搭載した、いわゆるパラレル方式又はシリーズパラレル方式のハイブリッド自動車にも適用することもできる。さらに、その他のシステムに用いることもできる。
(1) DC /
In the above embodiment, the DC /
(2)電流センサ62、64の故障判定
上記実施形態では、内部損失マップ59を用いて、すなわち、1次電流I1、1次電圧V1及び2次電圧V2に基づいて推定損失Lconを決定したが、これに限られない。例えば、2次電流I2、1次電圧V1及び2次電圧V2に基づいて推定損失Lconを決定してもよい。また、1次電流I1のみ、1次電圧V1及び2次電圧V2のみ等により推定損失Lconを選択することもできる。さらに、推定損失Lconを固定値とすることも可能である。
(2) Failure determination of
上記実施形態では、入力電力Winと、出力電力Wout及び推定損失Lconの和との差Dwを用いて、電流センサ62、64の故障を検出したが、これに限られない。代わりに、入力電力Winと、出力電力Wout及び推定損失Lconの和との比の値Rw{Rwは、Win/(Wout+Lcon)又はその逆数}を用いて、電流センサ62、64の故障を検出することもできる。この場合、比の値Rwは、理想的には常に1となるから、比の値Rwが1から偏差している程度に応じて(比の値Rwと所定の閾値との偏差に基づいて)電流センサ62、64が故障しているかどうかを判定可能である。
In the above embodiment, the failure of the
(3)電圧センサ61、63の故障判定
上記実施形態では、2次電圧V2と1次電圧V1との比の値Rvと、デューティ比DUTとの差Drを用いて、電圧センサ61、63の故障を検出したが、これに限られない。代わりに、比の値Rvとデューティ比DUTとの比の値Rv2(Rv2は、Rv/DUT又はその逆数)を用いて、電圧センサ61、63の故障を検出することもできる。この場合、比の値Rv2は、理想的には常に1となるから、比の値Rv2が1から偏差している程度に応じて(比の値Rv2と所定の閾値との偏差に基づいて)電圧センサ61、63が故障しているかどうかを判定可能である。
(3) Failure determination of
上記実施形態における電圧センサ61、63の故障判定(図7のフローチャート)は、降圧チョッパ制御を前提としたものであったが、昇圧チョッパ制御を前提とした電圧センサ61、63の故障判定も可能である。すなわち、昇圧チョッパ制御に用いられる下アーム素子82の駆動時間(下アーム素子駆動時間T2)がスイッチング周期Tswに占める割合を第2デューティ比DUT2とすると、上述の通り、第2デューティ比DUT2は、「1−DUT」及び「1−(V1/V2tar)」として表現可能である(V2tarは、目標2次電圧である。)。このため、第2デューティ比DUT2と、電圧センサ61、63の測定値を用いた「1−(V1/V2)」との偏差に基づいて電圧センサ61、63の故障を判定することができる。
Although the failure determination of the
また、上記実施形態では、V2制御モードにおけるデューティ比DUTを前提としたが、V1制御モードにおけるデューティ比DUT(=V1tar/V2)等を用いることも可能である(V1tarは、目標1次電圧である。)。 In the above embodiment, the duty ratio DUT in the V2 control mode is assumed. However, the duty ratio DUT (= V1tar / V2) in the V1 control mode can also be used (V1tar is a target primary voltage). is there.).
(4)その他
上記実施形態では、電圧センサ61、63の故障判定と、電流センサ62、64の故障判定の両方を行ったが、片方のみを行うこともできる。
(4) Others In the above embodiment, both the failure determination of the
上記実施形態では、電流センサ62、64の少なくとも一方が故障していると判定した場合、I1制御モードを禁止したが、その他の対応を取ることもできる。例えば、予備の電流センサを設けておき、電流センサ62、64の故障を検出したら、この予備の電流センサを用いる構成も可能である。同様に、電圧センサ61、63の少なくとも一方が故障していると判定した場合、V2制御モード及びV1制御モードを禁止したが、その他の対応を取ることもできる。例えば、予備の電圧センサを設けておき、電圧センサ61、63の故障を検出したら、この予備の電圧センサを用いる構成も可能である。
In the above embodiment, when it is determined that at least one of the
上記実施形態では、単相の相アームUAを用いたが、複数の相アームを用いてもよい。 In the above embodiment, the single-phase phase arm UA is used, but a plurality of phase arms may be used.
20…車両用電力システム 22…燃料電池(第2電力装置)
23…DC/DCコンバータ装置(VCU)
24…バッテリ(第1電力装置) 26…モータ(第2電力装置)
34…インバータ 36…DC/DCコンバータ
54…コンバータ制御部 59…内部損失マップ
61、63…電圧センサ 62、64…電流センサ
81…上アーム素子 82…下アーム素子
83、84…ダイオード 90…リアクトル
Dr…入力電圧と出力電圧の比の値とデューティ比との差
DUT…デューティ比 DUT2…第2デューティ比
Dw…入力電力と、出力電力及び推定損失の和との差
Iin…入力電流 Iout…出力電流
Lcon…推定損失 Rv…入力電圧と出力電圧の比の値
THr…電圧センサ故障判定閾値 THw…電流センサ故障判定閾値
UA…相アーム UH、UL…駆動信号
Vin…入力電圧 Vout…出力電圧
Win…入力電力 Wout…出力電力
DESCRIPTION OF SYMBOLS 20 ... Electric power system for
23 ... DC / DC converter unit (VCU)
24 ... Battery (first power device) 26 ... Motor (second power device)
34 ...
Claims (4)
前記DC/DCコンバータからの出力電流と出力電圧の積から出力電力を計算し、
前記DC/DCコンバータで発生する推定損失を設定し、
前記入力電力と、前記出力電力及び前記推定損失の和との差又は比を計算し、
この差又は比と、予め記憶した所定の閾値とを比較し、
前記差又は比と前記所定の閾値との偏差に基づいて、前記入力電流又は前記出力電流を測定する前記DC/DCコンバータの電流センサが故障しているかどうかを判定する
ことを特徴とするDC/DCコンバータの故障検出方法。 Calculate the input power from the product of the input current and the input voltage to the DC / DC converter,
Calculate the output power from the product of the output current and the output voltage from the DC / DC converter,
Set the estimated loss that occurs in the DC / DC converter,
Calculating the difference or ratio between the input power and the sum of the output power and the estimated loss;
Compare this difference or ratio with a pre-stored predetermined threshold,
Determining whether a current sensor of the DC / DC converter for measuring the input current or the output current has failed based on a deviation between the difference or ratio and the predetermined threshold value. DC converter failure detection method.
現在のデューティ比を検知し、
前記入力電圧と前記出力電圧との比を計算し、
前記比と前記デューティ比との差又は比を計算し、
この差又は比と、予め記憶した所定の第2閾値とを比較し、
前記差又は比と前記第2閾値との偏差に基づいて、前記入力電圧又は前記出力電圧を測定する前記DC/DCコンバータの電圧センサが故障しているかどうかを判定する
ことを特徴とするDC/DCコンバータの故障検出方法。 The failure detection method for a DC / DC converter according to claim 1,
Detect the current duty ratio,
Calculating the ratio of the input voltage to the output voltage;
Calculating the difference or ratio between the ratio and the duty ratio;
Compare this difference or ratio with a pre-stored predetermined second threshold,
It is determined whether a voltage sensor of the DC / DC converter that measures the input voltage or the output voltage is faulty based on a deviation between the difference or ratio and the second threshold value. DC converter failure detection method.
前記電流センサが故障していると判定した場合、該電流センサの測定値を用いて前記入力電流又は前記出力電流を制御する動作モードを禁止する
ことを特徴とするDC/DCコンバータの故障検出方法。 The failure detection method for a DC / DC converter according to claim 1 or 2,
A failure detection method for a DC / DC converter, wherein, when it is determined that the current sensor is broken, an operation mode for controlling the input current or the output current is prohibited using a measurement value of the current sensor. .
前記入力電流又は前記出力電流と、前記入力電圧と、前記出力電圧とに基づいて前記推定損失を設定する
ことを特徴とするDC/DCコンバータの故障検出方法。 In the failure detection method of the DC / DC converter of any one of Claims 1-3,
A failure detection method for a DC / DC converter, wherein the estimated loss is set based on the input current or the output current, the input voltage, and the output voltage.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008053166A JP5058024B2 (en) | 2008-03-04 | 2008-03-04 | DC / DC converter failure detection method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008053166A JP5058024B2 (en) | 2008-03-04 | 2008-03-04 | DC / DC converter failure detection method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009213246A JP2009213246A (en) | 2009-09-17 |
| JP5058024B2 true JP5058024B2 (en) | 2012-10-24 |
Family
ID=41185854
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008053166A Expired - Fee Related JP5058024B2 (en) | 2008-03-04 | 2008-03-04 | DC / DC converter failure detection method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5058024B2 (en) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5338618B2 (en) * | 2009-10-28 | 2013-11-13 | オムロン株式会社 | Abnormality determination device, power conditioner, abnormality determination method, and program |
| JP5532995B2 (en) * | 2010-02-12 | 2014-06-25 | トヨタ自動車株式会社 | Power control device |
| JP5732820B2 (en) * | 2010-11-12 | 2015-06-10 | トヨタ自動車株式会社 | Drive device |
| WO2012073350A1 (en) * | 2010-12-01 | 2012-06-07 | トヨタ自動車株式会社 | Power supply system of vehicle |
| JP5546507B2 (en) * | 2011-08-08 | 2014-07-09 | 三菱電機株式会社 | Failure diagnosis device, power conversion device, and failure diagnosis method |
| JP2013074715A (en) * | 2011-09-28 | 2013-04-22 | Hitachi Koki Co Ltd | Charging device |
| JP6024209B2 (en) * | 2012-05-29 | 2016-11-09 | 株式会社豊田自動織機 | Battery charger control system |
| FR3010796B1 (en) * | 2013-09-17 | 2017-06-09 | Renault Sas | DEVICE FOR MONITORING A MOTOR VEHICLE BATTERY CHARGER AND METHOD THEREOF |
| KR102116583B1 (en) * | 2013-12-24 | 2020-06-05 | 두산인프라코어 주식회사 | Method and apparatus for testing component of electric power converting apparatus |
| JP6208024B2 (en) * | 2014-01-21 | 2017-10-04 | 株式会社東芝 | Power converter and control method of power converter |
| JP6361479B2 (en) * | 2014-02-07 | 2018-07-25 | 株式会社デンソー | Power converter |
| JP6115493B2 (en) * | 2014-02-17 | 2017-04-19 | 株式会社デンソー | Power converter |
| KR101558736B1 (en) | 2014-02-19 | 2015-10-07 | 현대자동차주식회사 | Method for diagnosing the failure of vehicle using output impedance of DC/DC Converter |
| JP6149884B2 (en) * | 2014-08-28 | 2017-06-21 | 株式会社デンソー | Voltage converter controller |
| JP6424721B2 (en) * | 2015-04-10 | 2018-11-21 | 株式会社オートネットワーク技術研究所 | Semiconductor device, transformer device and power supply system |
| JP6437100B2 (en) * | 2015-04-15 | 2018-12-12 | 三菱電機株式会社 | Vehicle power supply |
| JP6410897B1 (en) * | 2017-07-28 | 2018-10-24 | 三菱電機株式会社 | Power converter |
| JP6966694B2 (en) * | 2017-09-27 | 2021-11-17 | 富士通株式会社 | Power supply and power management program |
| JP6522211B1 (en) * | 2018-07-02 | 2019-05-29 | 三菱電機株式会社 | Power converter |
| JP7088032B2 (en) * | 2019-01-08 | 2022-06-21 | トヨタ自動車株式会社 | Fuel cell vehicle and its control method |
| JP7039513B2 (en) * | 2019-03-14 | 2022-03-22 | 本田技研工業株式会社 | Power system |
| JP7352130B2 (en) * | 2019-03-20 | 2023-09-28 | 株式会社デンソー | polyphase converter |
| KR102294575B1 (en) * | 2019-12-13 | 2021-08-27 | 한밭대학교 산학협력단 | Sensor fault diagnosis system for converter |
| WO2023288095A1 (en) * | 2021-07-15 | 2023-01-19 | Lutron Technology Company Llc | Power supply device with over-power protection |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3632657B2 (en) * | 2001-12-20 | 2005-03-23 | トヨタ自動車株式会社 | Voltage converter |
| JP2003333701A (en) * | 2002-05-14 | 2003-11-21 | Nissan Motor Co Ltd | Motor control device |
| US6977492B2 (en) * | 2002-07-10 | 2005-12-20 | Marvell World Trade Ltd. | Output regulator |
| JP2006020401A (en) * | 2004-06-30 | 2006-01-19 | Fuji Heavy Ind Ltd | Hybrid vehicle battery management system |
| JP2007295785A (en) * | 2006-03-29 | 2007-11-08 | Toyota Motor Corp | Converter control device |
-
2008
- 2008-03-04 JP JP2008053166A patent/JP5058024B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009213246A (en) | 2009-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5058024B2 (en) | DC / DC converter failure detection method | |
| US8609289B2 (en) | Fuel cell system | |
| JP4541425B2 (en) | DC / DC converter device | |
| JP5143665B2 (en) | Electric power system and fuel cell vehicle | |
| US8273490B2 (en) | Fuel cell system | |
| CN109639137B (en) | power supply unit | |
| JP5454987B2 (en) | Fuel cell system | |
| JP4444343B2 (en) | Fuel cell vehicle | |
| JPWO2012002082A1 (en) | Electric car | |
| US11427179B2 (en) | Power supply system | |
| JP2008098134A (en) | Fuel cell system | |
| CN108493524B (en) | fuel cell system | |
| US10122177B2 (en) | Power supply method and power supply system | |
| JP5780107B2 (en) | Power storage system and method for detecting current sensor abnormality | |
| JP5226475B2 (en) | DC / DC converter device and fault detection method for current sensor of the device | |
| JP4712895B2 (en) | Fuel cell vehicle | |
| JP5081738B2 (en) | Fuel cell vehicle | |
| JP5121556B2 (en) | DC / DC converter device and electric vehicle | |
| JP5504306B2 (en) | Control method of fuel cell system | |
| JP2009213219A (en) | Method for recognizing abnormal current and method for controlling operation of power system for vehicle | |
| JP5430506B2 (en) | Electric car | |
| JP5474681B2 (en) | Electric car | |
| JP5167026B2 (en) | Fuel cell system | |
| KR102805172B1 (en) | Trouble diagnosis method for current sensor of fuel cell vehicle | |
| JP5226502B2 (en) | Current sensor ground fault judgment device and method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120627 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120703 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120731 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150810 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5058024 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |