この発明の実施の一形態の農作業機となる苗移植機を以下に説明する。
図1及び図2は、走行車輌を備える乗用型の4条植田植機(苗移植機)1を示すものであり、車体2の前後には走行車輪としての左右一対の前輪3及び後輪4が架設されている。車体上前部には操作ボックス5及びステアリングハンドル6等を有する操縦装置が設置され、また、車体2の後方には昇降可能な苗植付部7が装備されている。また、車体2の後部には粉粒体施用装置となる施肥装置8が設けられ、肥料タンク9に貯留する肥料を各条の繰出部10で所定量づつ繰り出し、その繰り出した肥料をブロア11からの圧力風により各条の移送ホース12で苗植付部7に設けた吐出口13から吐出して施肥する構成となっている。また、車体2の後側で苗植付部7の前側には苗植付部7からリンク61により上下位置変更可能に支持される対地作業装置となる整地ロータ38が設けられ、該整地ロータ38の駆動により植付前の圃場を整地する構成となっている。尚、ロータ高さ調節レバー62の操作により、前記リンク61を回動させて苗植付部7に対する整地ロータ38の高さを変更設定できる構成となっている。操縦装置の後側に運転席(座席)14が設置され、運転席14の下側に田植機の各部に動力を伝達するエンジン15が搭載されている。
A seedling transplanter serving as an agricultural working machine according to an embodiment of the present invention will be described below.
FIG. 1 and FIG. 2 show a riding type 4-row transplanter (seedling transplanter) 1 having a traveling vehicle. A pair of left and right front wheels 3 and rear wheels 4 as traveling wheels are provided in front of and behind a vehicle body 2. Is built. A steering device having an operation box 5 and a steering handle 6 is installed at the front upper part of the vehicle body, and a seedling planting part 7 that can be moved up and down is provided at the rear of the vehicle body 2. Further, a fertilizer 8 serving as a granular material application device is provided at the rear portion of the vehicle body 2, and fertilizer stored in the fertilizer tank 9 is fed out by a predetermined amount by the feeding unit 10 of each strip, and the fed fertilizer is fed from the blower 11. It is the structure which discharges from the discharge port 13 provided in the seedling planting part 7 with the transfer air hose 12 of each strip | line, and fertilizes with the pressure wind of. In addition, a ground leveling rotor 38 serving as a ground working device supported by a link 61 from the seedling planting unit 7 so that the vertical position can be changed is provided on the rear side of the vehicle body 2 and in front of the seedling planting unit 7. It is configured to level the field before planting by driving. The height of the leveling rotor 38 relative to the seedling planting portion 7 can be changed and set by rotating the link 61 by operating the rotor height adjusting lever 62. A driver's seat (seat) 14 is installed on the rear side of the control device, and an engine 15 that transmits power to each part of the rice transplanter is mounted below the driver's seat 14.
エンジン15の上部には後方へ向けて排気するマフラー63が設けられ、該マフラー63の後方にはブロア11の吸気口11aを前側向きに配置している。従って、マフラー63からの熱風をブロア11が吸引でき、施肥装置8において肥料の乾燥を促すことができる。尚、エンジン15を上側から覆うエンジンカバー64は、エンジン15の前方及び左右側方を閉塞し後方を開放した構成となっており、上方の座席14を支持している。座席14は前部の回動軸14a回りに前側へ回動できる構成となっており、該座席14を前側へ回動させた状態でエンジンカバー64の上面部に設けた燃料供給用孔64aが露出し、該燃料供給用孔64aを介してエンジンカバー64内に設けた燃料供給口65へ燃料を供給できる構成となっている。前記燃料供給用孔64aは燃料供給口65に対して偏位して大きく構成され、該燃料供給用孔64aを介してエンジンカバー64内のリコイルノブ66を引っ張ってエンジン15を始動させる構成となっている。従って、前記の孔64aは、燃料供給用とエンジン始動用(リコイルノブ操作用)とを兼用しており、従来のようにエンジンカバーあるいは車体カバーの露出した部分にエンジン始動用(リコイルノブ操作用)の孔を設けなくてよく、外観がすっきりとして良くなる。尚、エンジン15の始動のためにセルモータも備えており、リコイルノブ66はセルモータが故障したとき等の非常用として使用できる構成となっている。
A muffler 63 that exhausts rearward is provided at the upper portion of the engine 15, and an air inlet 11 a of the blower 11 is disposed in the front side behind the muffler 63. Therefore, the blower 11 can suck the hot air from the muffler 63, and the fertilizer application 8 can prompt the drying of the fertilizer. The engine cover 64 that covers the engine 15 from above is configured to close the front and left and right sides of the engine 15 and open the rear, and supports the upper seat 14. The seat 14 is configured to be pivotable forward about the pivot shaft 14a at the front portion, and a fuel supply hole 64a provided in the upper surface portion of the engine cover 64 in a state where the seat 14 is pivoted to the front side. The structure is such that the fuel can be supplied to the fuel supply port 65 provided in the engine cover 64 through the fuel supply hole 64a. The fuel supply hole 64a is configured to be deviated with respect to the fuel supply port 65 and configured to start the engine 15 by pulling the recoil knob 66 in the engine cover 64 through the fuel supply hole 64a. Yes. Therefore, the hole 64a serves both for supplying fuel and for starting the engine (for operating the recoil knob), and for starting the engine (for operating the recoil knob) on the exposed part of the engine cover or the vehicle body cover as in the prior art. There is no need to provide holes, and the appearance is improved. A cell motor is also provided for starting the engine 15, and the recoil knob 66 is configured to be used as an emergency when the cell motor fails.
尚、エンジンカバー64は該カバー64の前下端に設けた支点軸64b回りに前側へ回動する構成となっており、このエンジンカバー64の回動によりエンジン15を露出させて外方より該エンジン15のメンテナンスを行うことができる。前記支点軸64bは車体2のステップフロア面67より下位にあるので、回動によるエンジンカバー64の移動量を大きくすることができ、開放スペースを大きくできる。従来は、支点軸がステップフロア面より上位にあったので、エンジンカバーの回動による開放スペースを十分に得られないという問題がある。
The engine cover 64 is configured to rotate forward about a fulcrum shaft 64b provided at the front lower end of the cover 64, and the engine 15 is exposed by the rotation of the engine cover 64, so that the engine cover 64 is exposed from the outside. 15 maintenances can be performed. Since the fulcrum shaft 64b is located below the step floor surface 67 of the vehicle body 2, the amount of movement of the engine cover 64 due to rotation can be increased, and the open space can be increased. Conventionally, since the fulcrum shaft is higher than the step floor surface, there is a problem that an open space due to the rotation of the engine cover cannot be obtained sufficiently.
前記ステアリングハンドル6は、この回動操作によりステアリングポスト内のステアリング軸からステアリングケース内を経て減速回転される出力軸、ピットマンア−ム及び操向ロッド等を介して左右の前輪3を操向させ操舵するようになっている。
The steering handle 6 is steered by steering the left and right front wheels 3 via an output shaft, a pitman arm, a steering rod, and the like that are decelerated and rotated from the steering shaft in the steering post through the steering case. It is supposed to be.
苗植付部7は、車体2の後部に昇降機構となる昇降リンク機構17を介して昇降可能に装着され、昇降用油圧シリンダ18の伸縮作動により昇降する構成であり、本例では、油圧シリンダ18の引き側で苗植付部7を上昇させる構成としている。なお、19は植付昇降レバーを示す。
The seedling planting part 7 is mounted on the rear part of the vehicle body 2 via a lifting link mechanism 17 serving as a lifting mechanism so as to be lifted and lowered by a telescopic operation of a lifting hydraulic cylinder 18. In this example, the hydraulic cylinder It is set as the structure which raises the seedling planting part 7 by 18 pulling sides. Reference numeral 19 denotes a planting lift lever.
また、この苗植付部7には、左右に往復動する苗載台となる苗載タンク20、1株分の苗を切取って土中に植込む植込杆21を有する植付装置22、苗植付面を滑走しながら整地するフロ−ト(サイドフロ−ト)23、センタフロ−ト24等を備えている。尚、昇降リンク機構17の苗植付部7側で上側の支点68は、昇降リンク機構17に設けた前後方向の長孔69により前後に移動自在に設けられ、揺動用スプリング70により前側に付勢されている。従って、この上側の支点68を移動自在にする長孔69の融通機構により、苗植付部7は、圃場面に追従して昇降リンク機構17の下側の支点71回りに前後に揺動し、車体2の前後傾斜に拘らず圃場面に対して所望の前後傾斜姿勢を維持する構成となっている。
In addition, the seedling planting unit 7 includes a planting device 22 having a seedling mounting tank 20 that serves as a seedling mounting table that reciprocates left and right, and a planting rod 21 that cuts out one seedling and transplants it into the soil. Further, a float (side float) 23, a center float 24, and the like that level the ground while sliding on the seedling planting surface are provided. The upper fulcrum 68 on the seedling planting part 7 side of the lifting link mechanism 17 is provided so as to be movable back and forth by a longitudinal hole 69 provided in the lifting link mechanism 17 and attached to the front side by a swinging spring 70. It is energized. Therefore, the seedling planting portion 7 swings back and forth around the lower fulcrum 71 of the lifting link mechanism 17 following the farm scene by the interchange mechanism of the long hole 69 that makes the upper fulcrum 68 movable. The vehicle body 2 is configured to maintain a desired front / rear tilt posture with respect to the farm field regardless of the front / rear tilt of the vehicle body 2.
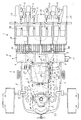
エンジン15の回転動力は、2連のエンジン出力プーリ25のうち左右方向内側のプーリ25aから前側に延びるベルト26を介して油圧式無段変速装置(HST)27の入力プ−リ28、入力軸29に伝えられ、この入力軸29からこれと同一軸芯上に設けられた伝動軸を介して油圧ポンプ90を駆動するようになっており、更に、油圧式無段変速装置27の出力軸からミッションケ−ス30のミッション入力軸に伝えられるようになっている。また、2連のエンジン出力プーリ25のうち左右方向外側のプーリ25bから後側に延びるベルト72を介して発電機73の入力プーリ74に伝動され、前記発電機73を駆動する。この油圧式無段変速装置(HST)27並びに発電機73の入力プ−リ28、74及びエンジン出力プーリ25は機体側面視で前後方向に一直線上に配置され、これらのプーリ25,28、74に巻回されるベルト26、72の側方(左右方向外側)に安全用のベルトカバー75を設け、該ベルトカバー75を機体側面視において直線状で簡単な構造としている。また、エンジン出力プーリ25及び発電機73はエンジンカバー64内に位置しないので、その分エンジンカバー64を小さくコンパクトに構成できる。尚、ベルトカバー75は、ベルト72が左右方向外側へ配置される分、後部が左右方向外側に位置するように屈曲した構成となっている。従来は、発電機がエンジンカバー内に配置され、発電機へ伝動するためのベルトがエンジン出力プーリから上側に延設されていたので、発電機を配置する分エンジンカバーを大きくしなければならず、またベルトカバーを機体側面視でL字型に構成しなければならずベルトカバーの構造が複雑なものとなっていた。
The rotational power of the engine 15 is supplied to an input pulley 28 and an input shaft of a hydraulic continuously variable transmission (HST) 27 via a belt 26 extending forward from a pulley 25a on the inner side in the left-right direction of the two engine output pulleys 25. The hydraulic pump 90 is driven from the input shaft 29 via a transmission shaft provided on the same axis as the input shaft 29, and from the output shaft of the hydraulic continuously variable transmission 27. It is transmitted to the mission input shaft of the mission case 30. Further, the two engine output pulleys 25 are transmitted to an input pulley 74 of a generator 73 via a belt 72 extending rearward from a pulley 25b on the outer side in the left-right direction, thereby driving the generator 73. The hydraulic continuously variable transmission (HST) 27, the input pulleys 28 and 74 of the generator 73, and the engine output pulley 25 are arranged in a straight line in the front-rear direction when viewed from the side of the machine body. A belt cover 75 for safety is provided on the sides (outside in the left-right direction) of the belts 26 and 72 wound around the belt, and the belt cover 75 has a straight and simple structure in a side view of the body. Further, since the engine output pulley 25 and the generator 73 are not located within the engine cover 64, the engine cover 64 can be made smaller and more compact accordingly. The belt cover 75 is bent so that the belt 72 is disposed outward in the left-right direction, and the rear portion is positioned outward in the left-right direction. Conventionally, the generator is arranged in the engine cover, and the belt for transmission to the generator is extended upward from the engine output pulley. Therefore, the engine cover has to be enlarged as much as the generator is arranged. In addition, the belt cover has to be configured in an L shape in a side view of the body, and the structure of the belt cover is complicated.
操作ボックスすなわちフロントカバー5の上部近傍には、該油圧式無段変速装置27を駆動する変速レバ−31が配置され、この変速レバ−31の前後方向の操作で油圧式無段変速装置27を駆動し機体の前進及び後進制御を司るように構成されている。運転席14の前方右側には、前輪3及び後輪4への伝動を断つと共に該前輪3及び後輪4を制動するためのブレーキペダル(クラッチペダル)32を設けている。尚、このブレーキペダル(クラッチペダル)32を踏み込み操作することにより、ベルト26のテンションプーリが退避して油圧式無段変速装置(HST)27への伝動が断たれると共に、ミッションケ−ス30内の4輪ブレーキ装置を制動作動させる構成となっている。
A shift lever 31 for driving the hydraulic continuously variable transmission 27 is disposed in the vicinity of the upper portion of the operation box, that is, the front cover 5, and the hydraulic continuously variable transmission 27 is operated by operating the shift lever 31 in the front-rear direction. It is configured to drive and manage forward and backward control of the airframe. A brake pedal (clutch pedal) 32 is provided on the front right side of the driver's seat 14 to cut off transmission to the front wheels 3 and the rear wheels 4 and brake the front wheels 3 and the rear wheels 4. By depressing the brake pedal (clutch pedal) 32, the tension pulley of the belt 26 is retracted, the transmission to the hydraulic continuously variable transmission (HST) 27 is cut off, and the mission case 30 The four-wheel brake device is configured to be braked.
また、このブレーキペダル(クラッチペダル)32を踏み込み操作状態(制動状態)で保持できるペダル保持装置を設けている。このペダル保持装置は、ブレーキペダル(クラッチペダル)32に係合する切欠き部を設けたペダル保持アームを備え、該ペダル保持アームをブレーキペダル(クラッチペダル)32側に回動させて該ブレーキペダル(クラッチペダル)32を踏み込み操作状態(制動状態)で保持する構成となっている。尚、前記ブレーキペダル(クラッチペダル)32及びペダル保持装置が、走行車輌の走行を停止させる操作をするための走行停止手段となる。
Further, a pedal holding device is provided that can hold the brake pedal (clutch pedal) 32 in the depressed operation state (braking state). The pedal holding device includes a pedal holding arm provided with a notch portion that engages with a brake pedal (clutch pedal) 32, and the pedal holding arm is rotated toward the brake pedal (clutch pedal) 32 to thereby provide the brake pedal. The (clutch pedal) 32 is configured to be held in a depressed operation state (braking state). The brake pedal (clutch pedal) 32 and the pedal holding device serve as travel stop means for performing an operation to stop travel of the traveling vehicle.
ミッションケース30内からの動力により、苗植付部7が作動すると共に、該ミッションケース30の左右両側に設けた前輪3が駆動する。また、ミッションケース30内からの動力が左右各々の後輪伝動軸33を介して左右の後輪伝動ケース34内へ伝動され、後輪4が駆動する。
The seedling planting unit 7 is operated by the power from within the mission case 30 and the front wheels 3 provided on the left and right sides of the mission case 30 are driven. The power from the transmission case 30 is transmitted to the left and right rear wheel transmission cases 34 via the left and right rear wheel transmission shafts 33, and the rear wheels 4 are driven.
ミッションケース30の後面には後側へ延びるメインフレーム76を固着しており、該メインフレーム76の後端に左右方向に延びる後部フレーム49を固着している。この後部フレーム49には上方へ延びる左右2本の上下フレーム77を固着しており、該上下フレーム77に昇降リンク機構17が回動自在に支持されると共に、該上下フレーム77の上部で肥料タンク9及び繰出部10等の施肥装置8の要部が支持されている。また、メインフレーム76と上下フレーム77を繋いで前下がりに傾斜する補強フレーム78が設けられ、該補強フレーム78の下端部をメインフレーム76より下側にまで突出させ、この補強フレーム78の下端部に昇降用油圧シリンダ18を支持する基部支点軸79を設けている。これにより、基部支点軸79を取り付けるための格別な部品が不要となり、コストダウンが図れると共に、昇降用油圧シリンダ18を低位に配置することができて機体の低重心化が図れる。
A main frame 76 extending rearward is fixed to the rear surface of the mission case 30, and a rear frame 49 extending in the left-right direction is fixed to the rear end of the main frame 76. The left and right upper and lower frames 77 extending upward are fixed to the rear frame 49, and the elevating link mechanism 17 is rotatably supported by the upper and lower frames 77, and a fertilizer tank is disposed above the upper and lower frames 77. Main parts of the fertilizer application device 8 such as 9 and the feeding unit 10 are supported. Further, a reinforcing frame 78 is provided that connects the main frame 76 and the upper and lower frames 77 and is inclined forward and downward. The lower end portion of the reinforcing frame 78 protrudes downward from the main frame 76, and the lower end portion of the reinforcing frame 78 is provided. A base fulcrum shaft 79 for supporting the lifting hydraulic cylinder 18 is provided. This eliminates the need for special parts for attaching the base fulcrum shaft 79, reduces costs, and allows the elevating hydraulic cylinder 18 to be disposed at a low position, thereby reducing the center of gravity of the airframe.
左側の後輪伝動ケース34の左右方向内側(右側)には、該ケース34から出力される左右方向のロータ用出力軸35を設けている。このロータ用出力軸35から該軸35回りに上下回動自在のロータ駆動用ケース36及びロータ伝動軸37を介して車体2の後側で且つ苗植付部7の前側に設けた整地ロータ38へ伝動し、該整地ロータ38を駆動する構成となっている。従って、前記ロータ駆動用ケース36及びロータ伝動軸37等が、後輪伝動ケース34内から整地装置38へ伝動する対地作業用伝動機構となる。尚、整地ロータ38は左右中央の中央ロータ38aと左右両側の側部ロータ38bとで3分割された構成となっており、前記中央ロータ38aは前記側部ロータ38bより前側に位置しており、ロータ伝動軸37からの動力は先ず中央ロータ38aの左右中央位置に入力されて該中央ロータ38aへ伝動され、中央ロータ38aから左右のロータ伝動ケース80を介して左右の側部ロータ38bへ伝動される構成となっている。
A left-right rotor output shaft 35 that is output from the case 34 is provided on the inner side (right side) of the left rear wheel transmission case 34 in the left-right direction. A leveling rotor 38 provided on the rear side of the vehicle body 2 and on the front side of the seedling planting portion 7 through a rotor driving case 36 and a rotor transmission shaft 37 that can be rotated up and down around the shaft 35 from the rotor output shaft 35. And the leveling rotor 38 is driven. Accordingly, the rotor driving case 36, the rotor transmission shaft 37, and the like serve as a ground work transmission mechanism that transmits power from the rear wheel transmission case 34 to the leveling device 38. The leveling rotor 38 is divided into a left and right central rotor 38a and left and right side rotors 38b, and the central rotor 38a is positioned in front of the side rotor 38b. The power from the rotor transmission shaft 37 is first input to the left and right central positions of the central rotor 38a, transmitted to the central rotor 38a, and transmitted from the central rotor 38a to the left and right side rotors 38b via the left and right rotor transmission cases 80. It is the composition which becomes.
一方、右側の後輪伝動ケース34の左右方向内側(左側)には、該ケース34から出力される左右方向の施肥用出力軸39を設けている。この施肥用出力軸39から該軸39と一体回転する駆動クランクアーム40、駆動ロッド41及び従動アーム42を介して施肥駆動軸43へ該軸43が往復回動するよう伝動され、この施肥駆動軸43から各2条毎の入力アーム44、ロッド45、出力アーム46及び一方向クラッチ47等で構成される施肥伝動機構48を介して該施肥伝動機構48の左右に設けた各々の繰出部10へ伝動し、該繰出部10内の繰出ロータを一方向へ所定角度づつ回転させる構成となっている。従って、前記駆動クランクアーム40、駆動ロッド41、従動アーム42、施肥駆動軸43及び施肥伝動機構48等により、後輪伝動ケース34内から前記施肥装置8へ伝動する粉粒体施用用伝動機構を構成している。
On the other hand, an output shaft 39 for fertilization in the left-right direction output from the case 34 is provided on the inner side (left side) in the left-right direction of the rear wheel transmission case 34 on the right side. The fertilizer output shaft 39 is transmitted to the fertilizer drive shaft 43 through a drive crank arm 40, a drive rod 41 and a driven arm 42 that rotate integrally with the shaft 39 so as to reciprocate and rotate. 43 to each feeding section 10 provided on the left and right of the fertilization transmission mechanism 48 via a fertilization transmission mechanism 48 constituted by the input arm 44, the rod 45, the output arm 46, the one-way clutch 47, etc. Transmission is configured to rotate the feeding rotor in the feeding unit 10 in one direction at a predetermined angle. Therefore, a transmission mechanism for applying powder material that is transmitted from the rear wheel transmission case 34 to the fertilizer 8 by the drive crank arm 40, the drive rod 41, the driven arm 42, the fertilizer drive shaft 43, the fertilizer transmission mechanism 48, and the like. It is composed.
このように、左右の後輪伝動ケース34から整地ロータ38及び施肥装置8の繰出部10へ伝動するにあたり、一方の後輪伝動ケース34から整地ロータ38へ伝動し、他方の後輪伝動ケース34から繰出部10へ伝動する構成として、それぞれの伝動出力を左右で振り分けた構成としたので、左右の後輪伝動ケース34内の伝動負荷の均一化が図れ、ひいては左右の後輪4の駆動力の均一化が図れて機体の走行性能及び直進性能が向上する。また、整地ロータ38及び施肥装置8の繰出部10への伝動機構を交錯させずに簡潔に構成できる。
In this way, when transmitting from the left and right rear wheel transmission cases 34 to the leveling rotor 38 and the feeding portion 10 of the fertilizer application device 8, transmission is performed from one rear wheel transmission case 34 to the leveling rotor 38 and the other rear wheel transmission case 34 is transmitted. As the structure for transmitting the power to the feeding section 10, the transmission outputs are distributed to the left and right, so that the transmission load in the left and right rear wheel transmission cases 34 can be made uniform, and consequently the driving force of the left and right rear wheels 4. And the running performance and straight running performance of the aircraft are improved. Moreover, it can comprise simply, without making the transmission mechanism to the feeding part 10 of the leveling rotor 38 and the fertilizer applicator 8 cross.
尚、左右の後輪伝動ケース34は、共用化されており、後輪車軸56が左右外側へ向くよう左右対称に設けている。従って、左側の後輪伝動ケース34に設けたロータ用出力軸35と右側の後輪伝動ケース34に設けた施肥用出力軸39とは、後輪伝動ケース34においては同一の軸であり、後輪伝動ケース34の入力軸34bから後輪車軸56への伝動におけるカウンタ伝動軸を兼ねている。このカウンタ伝動軸35、39は、後輪車軸56より前側で且つ後述する回動支点軸54を挿入するための孔より後側に配置されている。従って、このカウンタ伝動軸35,39が、後輪車軸56より回動支点軸54に近い後輪伝動ケース34内の伝動軸となる。
The left and right rear wheel transmission cases 34 are shared, and are provided symmetrically so that the rear wheel axle 56 faces the left and right outer sides. Therefore, the rotor output shaft 35 provided on the left rear wheel transmission case 34 and the fertilizer output shaft 39 provided on the right rear wheel transmission case 34 are the same shaft in the rear wheel transmission case 34, and the rear It also serves as a counter transmission shaft in transmission from the input shaft 34 b of the wheel transmission case 34 to the rear wheel axle 56. The counter transmission shafts 35 and 39 are disposed in front of the rear wheel axle 56 and rearward of a hole for inserting a rotation fulcrum shaft 54 described later. Accordingly, the counter transmission shafts 35 and 39 become transmission shafts in the rear wheel transmission case 34 that are closer to the rotation fulcrum shaft 54 than the rear wheel axle 56.
車体1の後部に設けた左右方向に延びる後部フレーム49の左右両端部には、プレートで構成される左右方向内側の第一支持部材50と左右方向外側の第二支持部材51とを各々設けている。前記第一支持部材50及び第二支持部材51は後部フレーム49から下側に延設され、第一支持部材50は後部フレーム49に溶接して固定され、第二支持部材51は後部フレーム49の端部に設けたブラケット52に前後上下計4本の取付ボルト53により着脱可能に装着されている。第一支持部材50の下端部には左右方向外側に延びる回動支点軸54を溶接して固定し、第二支持部材51の下端部には前記回動支点軸54の端部を挿入する孔51aを設けている。従って、回動支点軸54は、第一支持部材50と第二支持部材51とで両持ち支持されている。これにより、回動支点軸54の支持が安定し、該軸54のガタを抑えることができ、後述する後輪4の上下動を適正に且つ安定して行える。左右方向で第一支持部材50と第二支持部材51との間には、後部フレーム49から後方に延びる背面視U字型の第三支持部材55を設けている。前記取付ボルト53により第二支持部材51を後部フレーム49に対して着脱可能に構成しているので、第二支持部材51を取り外して第一支持部材50で片持ち支持される回動支点軸54に沿って機体の左右方向外側から後輪伝動ケース34の着脱を容易に行える。
A first support member 50 on the inner side in the left-right direction and a second support member 51 on the outer side in the left-right direction are provided on the left and right ends of the rear frame 49 provided in the rear portion of the vehicle body 1 and extending in the left-right direction. Yes. The first support member 50 and the second support member 51 extend downward from the rear frame 49, the first support member 50 is fixed by welding to the rear frame 49, and the second support member 51 is attached to the rear frame 49. A bracket 52 provided at the end is detachably mounted by four mounting bolts 53 in total, front and rear. A rotation fulcrum shaft 54 extending outward in the left-right direction is fixed to the lower end portion of the first support member 50 by welding, and a hole for inserting the end portion of the rotation fulcrum shaft 54 into the lower end portion of the second support member 51. 51a is provided. Therefore, the rotation fulcrum shaft 54 is supported at both ends by the first support member 50 and the second support member 51. As a result, the support of the rotation fulcrum shaft 54 is stabilized, the backlash of the shaft 54 can be suppressed, and the vertical movement of the rear wheel 4 described later can be performed appropriately and stably. Between the first support member 50 and the second support member 51 in the left-right direction, a third U-shaped third support member 55 extending rearward from the rear frame 49 is provided. Since the second support member 51 is configured to be detachable from the rear frame 49 by the mounting bolt 53, the rotation fulcrum shaft 54 that is cantilevered by the first support member 50 by removing the second support member 51. The rear wheel transmission case 34 can be easily attached and detached from the outside in the left-right direction of the aircraft.
後輪伝動ケース34は、回動支点軸54を挿入するための孔及び後輪車軸56を挟む位置で分割する上下の分割ケース34aからなる構成であり、上下の分割ケース34aが共用化されている。尚、前記孔より後輪車軸56は後側に位置している。上側の分割ケース34aの左右内側には規制用ピン57を設け、該規制用ピン57が挿入される長孔58aを備える規制用アーム58が、前記第三支持部材55の側面に設けた支持軸59回りに回動自在に設けられている。従って、前記規制用ピン57の移動が前記長孔58a内で規制され、後輪伝動ケース34の上下回動域が規制される。従って、前記規制用ピン57及び規制用アーム58は、後輪伝動ケース34の上下方向の回動域を規制する規制部材となる。また、第三支持部材55の下面には弾性部材となるクッションゴム60を設けており、このクッションゴム60が後輪伝動ケース34に接触することにより、後輪4からの振動を吸収する構成となっている。
The rear wheel transmission case 34 includes a hole for inserting the rotation fulcrum shaft 54 and an upper and lower divided case 34a that is divided at a position sandwiching the rear wheel axle 56. The upper and lower divided cases 34a are shared. Yes. The rear wheel axle 56 is located on the rear side of the hole. A restriction pin 57 is provided on the left and right inner sides of the upper divided case 34 a, and a restriction arm 58 having a long hole 58 a into which the restriction pin 57 is inserted is provided on a side surface of the third support member 55. It is provided so as to be rotatable around 59. Therefore, the movement of the restriction pin 57 is restricted in the elongated hole 58a, and the vertical rotation area of the rear wheel transmission case 34 is restricted. Therefore, the restriction pin 57 and the restriction arm 58 serve as restriction members for restricting the vertical rotation area of the rear wheel transmission case 34. Further, a cushion rubber 60 serving as an elastic member is provided on the lower surface of the third support member 55, and the cushion rubber 60 contacts the rear wheel transmission case 34 to absorb vibration from the rear wheel 4. It has become.
よって、後輪伝動ケース34は回動支点軸54回りに上下回動可能に構成され、後進時及び前進時でも後輪4の駆動負荷が小さい通常の走行時には、機体の自重で規制用アーム58の長孔58aの上端に規制用ピン57が当たる位置まで後輪伝動ケース34が上動して後輪4が最上状態となる。このとき、後輪伝動ケース34はクッションゴム60に当接し、機体の振動が抑えられる。一方、前進時で後輪4に所定以上の駆動負荷が生じたときには、その駆動反力により機体の自重に抗して後輪伝動ケース34が下側へ回動して後輪4が下動する。この後輪4の下動は、規制用アーム58の長孔58aの下端に規制用ピン57が当たることにより、最下位置が規制される。
Therefore, the rear wheel transmission case 34 is configured to be able to rotate up and down around the rotation fulcrum shaft 54, and during normal traveling where the driving load of the rear wheel 4 is small even when moving backward and forward, the regulating arm 58 is driven by the weight of the airframe. The rear wheel transmission case 34 moves up to the position where the restriction pin 57 hits the upper end of the long hole 58a, and the rear wheel 4 is in the uppermost state. At this time, the rear wheel transmission case 34 abuts against the cushion rubber 60 and vibrations of the airframe are suppressed. On the other hand, when a driving load exceeding a predetermined value occurs on the rear wheel 4 during forward movement, the rear wheel transmission case 34 rotates downward against the dead weight of the fuselage by the driving reaction force, causing the rear wheel 4 to move downward. To do. The downward movement of the rear wheel 4 is regulated at the lowest position by the regulation pin 57 hitting the lower end of the long hole 58a of the regulation arm 58.
尚、回動支点軸54は、後輪4の外径内に設定している。従って、回動支点軸54と後輪車軸56との間隔を小さく設定しているので、後輪4の駆動反力で後輪伝動ケース34を下側へ回動させることができるのである。
The rotation fulcrum shaft 54 is set within the outer diameter of the rear wheel 4. Accordingly, since the distance between the rotation fulcrum shaft 54 and the rear wheel axle 56 is set small, the rear wheel transmission case 34 can be rotated downward by the driving reaction force of the rear wheel 4.
ところで、後輪伝動軸33は、ミッションケース30に近い前部と後輪伝動ケース34に近い後部とに自由な方向へ屈曲自在な継ぎ手(ユニバーサルジョイント)33aを備え、後輪伝動ケース34の上下回動による該後輪伝動ケース34の入力軸34bの移動に順応する構成となっている。そして、後輪伝動ケース34の回動で大きく屈曲変化する後側の継ぎ手33aにおいて、後輪車軸56が最上位置となるべく後輪伝動ケース34が上側に回動したとき前記継ぎ手33aが上側に凹となるよう屈曲し、後輪車軸56が最下位置となるべく後輪伝動ケース34が下側に回動したとき前記継ぎ手33aが下側に凹となるよう屈曲し、後輪伝動ケース34の上下回動において後輪伝動軸33の屈曲方向を互いに逆側にして上下に振り分けた構成としている。従って、後輪伝動ケース34の上下回動全域において、継ぎ手33aの屈曲角度を許容範囲内で極力小さく設定できるため、後輪伝動軸33による伝動ロスを低減できて後輪伝動ケース34ヘの伝動を良好にできる。また、後輪車軸56が最下となるときの後輪伝動軸33の継ぎ手33aの屈曲角度より後輪車軸56が最上となるときの後輪伝動軸33の継ぎ手33aの屈曲角度が小さくなる構成としたので、後進時や前進時でも後輪4の駆動負荷が小さい通常走行時には、機体の自重により後輪伝動ケース34が上側へ回動して後輪車軸56が最上位置となるため、継ぎ手33aの屈曲角度が小さく、該後輪伝動軸33による伝動ロスを低減できて後輪伝動ケース34ヘの伝動を良好にできる。
By the way, the rear wheel transmission shaft 33 includes a joint (a universal joint) 33a that can be freely bent at a front portion near the transmission case 30 and a rear portion near the rear wheel transmission case 34. The structure adapts to the movement of the input shaft 34b of the rear wheel transmission case 34 by rotation. Then, in the rear joint 33a that is greatly bent and changed by the rotation of the rear wheel transmission case 34, when the rear wheel transmission case 34 is rotated upward as much as possible, the joint 33a is recessed upward. When the rear wheel transmission case 34 is rotated downward as much as possible so that the rear wheel axle 56 is at the lowest position, the joint 33a is bent so as to be concave downward, and the rear wheel transmission case 34 is In the rotation, the rear wheel transmission shaft 33 is arranged in the vertical direction with the bending directions opposite to each other. Therefore, since the bending angle of the joint 33a can be set as small as possible within the permissible range in the entire vertical rotation range of the rear wheel transmission case 34, transmission loss due to the rear wheel transmission shaft 33 can be reduced, and transmission to the rear wheel transmission case 34 can be achieved. Can be improved. Further, the bending angle of the joint 33a of the rear wheel transmission shaft 33 when the rear wheel axle 56 is at the uppermost position is smaller than the bending angle of the joint 33a of the rear wheel transmission shaft 33 when the rear wheel axle 56 is at the lowermost position. Therefore, during normal traveling where the driving load of the rear wheel 4 is small even when the vehicle is moving backward or forward, the rear wheel transmission case 34 is rotated upward due to the weight of the fuselage and the rear wheel axle 56 is at the uppermost position. The bending angle of 33a is small, transmission loss due to the rear wheel transmission shaft 33 can be reduced, and transmission to the rear wheel transmission case 34 can be improved.
この田植機1により、直進植付時において、通常の走行負荷のときは後輪4が最上状態となり、耕盤が深くて過大な走行負荷がかかるようなときは、前輪3より車輪分担荷重の大きい後輪4が圃場に深く沈み込むことと後輪4の駆動反力との要因により、機体が前上がり姿勢になりやすいが、後輪4が下動状態となることで機体の前上がり姿勢が修正され、植付部7の沈下により苗植付姿勢が乱れたりするようなことを防止できる。一方、畦際での機体旋回時には、走行負荷が増大するので、自動的に後輪4が下動状態となることで機体が前下がり姿勢になり、機体旋回のために旋回内側の後輪4の駆動を断つことにより旋回外側しか駆動しない後輪4に対して左右両方を駆動させる前輪3の車輪分担荷重を増すことができ、ひいては前輪3の走行推進力を向上させることができ、旋回走行を円滑に行うことができる。また、前進での畦越え時や前進でのトラックへの積込時は、走行負荷が大きくなるため、後輪4が下動状態となって機体の前上がり姿勢が修正され、作業の安全性が図れる。また、畦越え時やトラックへの積込時でも機体が後上がり姿勢となる後進時は、後輪4が上動状態に維持され、後輪4が下動することにより機体が更に後上がり姿勢になることはなく、安全である。
With this rice transplanter 1, during normal planting, the rear wheel 4 is in the uppermost state during normal traveling load, and when the tiller is deep and an excessive traveling load is applied, the wheel sharing load is more than the front wheel 3. Although the large rear wheel 4 sinks deeply into the field and the driving reaction force of the rear wheel 4, the aircraft is likely to rise forward, but when the rear wheel 4 moves downward, the aircraft rises forward. Is corrected, and it is possible to prevent the seedling planting posture from being disturbed by the settlement of the planting part 7. On the other hand, since the traveling load increases at the time of turning the vehicle at the shore, the rear wheel 4 is automatically moved downward so that the vehicle is in a forward-lowering posture. The driving load of the front wheel 3 that drives both the left and right sides with respect to the rear wheel 4 that drives only the outside of the turn can be increased by cutting off the driving of the vehicle. Can be performed smoothly. Also, when traveling over the ridge or when loading on the truck during forward travel, the traveling load increases, so the rear wheel 4 moves downward and the front-up posture of the fuselage is corrected. Can be planned. In addition, the rear wheel 4 is maintained in the upward movement state when the aircraft is in the rearward raising posture even when over the ridge or when being loaded onto the truck, and the aircraft is further raised in the rearward posture by moving the rear wheel 4 downward. It will never be safe.
また、後輪伝動ケース34のカウンタ伝動軸となるロータ用出力軸35及び施肥用出力軸39が後輪車軸56より回動支点軸54に近い位置にあるので、後輪伝動ケース34の回動による対地作業用伝動機構及び粉粒体施用用伝動機構の移動量又は位置変化を小さくでき、これらの伝動機構による伝動の円滑化及び安定化が図れ、ひいては整地ロータ38による整地作業及び施肥装置8による施肥作業の適正化が図れる。
Further, since the rotor output shaft 35 and the fertilizer application output shaft 39 which are counter transmission shafts of the rear wheel transmission case 34 are located closer to the rotation fulcrum shaft 54 than the rear wheel axle 56, the rotation of the rear wheel transmission case 34 is performed. The amount of movement or change in position of the ground transmission mechanism and the powder application mechanism can be reduced, and the transmission can be smoothed and stabilized by the transmission mechanism. As a result, the leveling work and fertilizer 8 by the leveling rotor 38 can be achieved. Can optimize the fertilization work.
尚、前述のクッションゴム60に代えて圧縮スプリングを設け、後輪伝動ケース34の上下回動全域において前記圧縮スプリングを作用させる構成とすることができる。そして、後進時及び前進時でも後輪4の駆動負荷が小さい通常の走行時には圧縮スプリングが全圧縮状態となり、前進時で後輪4に所定以上の駆動負荷が生じたときには圧縮スプリングが伸長して後輪伝動ケース34の下側への回動を付勢することができる。尚、この圧縮スプリングを設ける場合も、前述のようなクッションゴム60を併用してもよい。
In addition, it can replace with the above-mentioned cushion rubber | gum 60, and it can be set as the structure which provides a compression spring and the said compression spring acts in the up-and-down rotation whole region of the rear-wheel transmission case 34. FIG. The compression spring is fully compressed during normal travel when the driving load of the rear wheel 4 is small even when the vehicle is moving backward and forward, and the compression spring is extended when a predetermined driving load is generated on the rear wheel 4 during the forward movement. The downward rotation of the rear wheel transmission case 34 can be urged. Even when this compression spring is provided, the cushion rubber 60 as described above may be used in combination.
尚、圧縮スプリングを設けるにあたり、前述の規制用アーム58の外周に巻回されるように設け、一端が第三支持部材55に当接して規制され、他端が規制用ピン57に当接して後輪伝動ケース34を下側に回動付勢する構成としてもよい。つまり、圧縮スプリングがその内部を通る規制用アーム58で支持され、圧縮スプリングの外れを防止できると共に、構成の簡略化が図れる。
In providing the compression spring, the compression spring is provided so as to be wound around the outer periphery of the restriction arm 58, one end is in contact with the third support member 55, and the other end is in contact with the restriction pin 57. The rear wheel transmission case 34 may be configured to be biased downward. That is, the compression spring is supported by the restricting arm 58 passing through the inside thereof, so that the compression spring can be prevented from coming off and the configuration can be simplified.
尚、後輪4の上動又は下動を付勢する付勢手段となる圧縮スプリングを設けた構成において、その付勢力を可変させることにより、後輪4を下動させる負荷を任意に変更可能にし、変速レバーの切り替えによる機体「移動」(路上走行)時には後輪4を下動させず、「植付作業」時には機体前部が浮き上がるような高負荷時のみ後輪4を下動させて機体の後部を上昇させるように構成することで、駆動反力の小さい路上走行では後輪4を上下動させず、駆動反力の大きい圃場走行では必要以上に後輪4が上下動しないように抵抗を与えることが可能となる。
In addition, in the configuration provided with a compression spring that serves as an urging means for urging the rear wheel 4 upward or downward, the load for moving the rear wheel 4 downward can be arbitrarily changed by varying the urging force. The rear wheel 4 is not moved down when the machine is “moving” (running on the road) by switching the shift lever, and the rear wheel 4 is moved down only during high loads when the front part of the machine is raised during “planting”. By configuring the rear part of the aircraft to rise, the rear wheel 4 is not moved up and down when traveling on the road with a small driving reaction force, and the rear wheel 4 is not moved up and down more than necessary when traveling on a field with a large driving reaction force. It becomes possible to give resistance.
また、上記のような構成において、油圧式無段変速装置27を駆動する変速レバ−31の操作に起因する前後進低速時には後輪4を下動させず、中・高速時には機体前部が浮き上がるような高負荷時のみ後輪4を下動させるよう構成することもでき、駆動反力の小さい低速走行では後輪4を上下動させず、駆動反力の大きい高速走行では必要以上に後輪4が上下動しないように抵抗を与えることが可能となる。
Further, in the above-described configuration, the rear wheel 4 is not moved down at the time of forward / backward traveling due to the operation of the transmission lever 31 that drives the hydraulic continuously variable transmission 27, and the front part of the body is lifted at the middle / high speed. The rear wheel 4 can also be configured to move downward only during such a high load, and the rear wheel 4 is not moved up and down in low speed traveling with a small driving reaction force, and the rear wheel is more than necessary in high speed traveling with a large driving reaction force. It is possible to provide resistance so that 4 does not move up and down.
更に、エンジン15のスロットル低回転時には後輪4を下動させず、中・高速時には機体前部が浮き上がるような高負荷時のみ後輪4を下動させて機体の後部を上昇させるように構成することもできる。
In addition, the rear wheel 4 is not moved down when the throttle of the engine 15 is low, and the rear wheel 4 is moved down to raise the rear part of the aircraft only at high loads where the front part of the fuselage is lifted at medium and high speeds. You can also
尚、前述のクッションゴム60を後進高負荷時には圧縮して撓むような弾力特性に設定し、後進高負荷時には逆に機体後部を下降させて機体の前下がり状態を緩和させ、前輪3の沈み込みを防止することもできる。これによれば、後進での畦越えやアユミ越えが容易にでき、走行抵抗の大きい湿田での後進性能が向上する。
The above-described cushion rubber 60 is set to have elastic characteristics such that it compresses and bends when the vehicle is moving backward, and the rear part of the aircraft is lowered to relieve the vehicle from being lowered when the vehicle is moving backward. Can also be prevented. According to this, it is possible to easily go over the ridge and Ayumi in the reverse direction, and the reverse performance in the wet field having a large running resistance is improved.
また、ブレーキペダル32の操作に連動して左右の後輪伝動ケース34の上下回動を規制する規制具を設け、機体を走行停止させたときには後輪4が上下動しないように固定する構成とし、トラック等での運搬時にはペダル保持装置によりブレーキペダル32を踏み込み状態で保持しておけば、運搬時の振動等により無闇に後輪4が上下動するようなことを防止でき、後輪伝動ケース34の急激な上下動により後部フレーム49や後輪伝動ケース34が破損するようなことを防止でき、また荷台等に保持するために機体に掛けられたロープが引っ張られて緩んだり切れたりするようなことを防止できる。
Further, a restricting tool for restricting the vertical rotation of the left and right rear wheel transmission cases 34 in conjunction with the operation of the brake pedal 32 is provided, and the rear wheel 4 is fixed so as not to move up and down when the vehicle is stopped running. If the brake pedal 32 is held in the depressed state by the pedal holding device during transportation on a truck, etc., the rear wheel 4 can be prevented from moving up and down by vibration during transportation, and the rear wheel transmission case. It is possible to prevent the rear frame 49 and the rear wheel transmission case 34 from being damaged due to a sudden up-and-down movement of the 34, and the rope hung on the fuselage to be held on the cargo bed etc. is pulled and loosened or cut off. You can prevent anything.
また、左右一方の後輪伝動ケース34と車体2に設けた回動アーム81の一端とを第一ケーブル82で接続し、前記回動アーム81の他端と昇降リンク機構17の上側の支点68を前側に付勢する揺動用スプリング70の他端(前端)とを第二ケーブル83で接続し、前記回動アーム81、第一ケーブル82及び第二ケーブル83からなる連動機構により、後輪4が上昇状態のときには前記上側の支点68が前側へ引っ張られて苗植付部7が前傾姿勢に修正され、後輪4が下降状態のときには第二ケーブル83が弛められて苗植付部7の自重により前記上側の支点68が後側へ移動して苗植付部7が後傾姿勢に修正される。これにより、後輪4の上下動による車体2の前後傾斜姿勢の変化に応じて苗植付部7の前後傾斜姿勢が所望の姿勢となるよう修正され、整地ロータ38及びフロート23、24による整地性の向上が図れると共に、苗の植付姿勢や植付深さの適正化が図れる。
Further, one of the left and right rear wheel transmission cases 34 and one end of a rotating arm 81 provided on the vehicle body 2 are connected by a first cable 82, and the other end of the rotating arm 81 and an upper fulcrum 68 of the elevating link mechanism 17. The other end (front end) of the swinging spring 70 that urges the front side to the front side is connected by the second cable 83, and the rear wheel 4 is connected by the interlocking mechanism including the rotating arm 81, the first cable 82, and the second cable 83. The upper fulcrum 68 is pulled forward to correct the seedling planting part 7 to the forward tilted position when the rear wheel 4 is in the lowered state, and the second cable 83 is loosened to raise the seedling planting part. 7, the upper fulcrum 68 moves to the rear side, and the seedling planting part 7 is corrected to the tilted posture. Accordingly, the front / rear tilting posture of the seedling planting unit 7 is corrected to a desired posture according to the change of the front / rear tilting posture of the vehicle body 2 due to the vertical movement of the rear wheel 4, and the leveling by the leveling rotor 38 and the floats 23, 24 is corrected. It is possible to improve the nature and to optimize the planting posture and planting depth of the seedling.
ところで、油圧ポンプ90が吐出する圧油は電磁式の油圧切替バルブ91ヘ供給され、該油圧切替バルブ91における油路の切替により、圧油を単動式の昇降用油圧シリンダ18へ供給して苗植付部7を上昇する状態に切り替えたり、苗植付部7の自重により該昇降用油圧シリンダ18内の圧油を油圧タンクを兼ねるミッションケース30内に戻して苗植付部7を下降する状態に切り替えたりする構成となっている。従って、油圧切替バルブ91の作動により、苗植付部7を昇降させることができる。そして、苗植付部7の昇降操作をするための植付昇降レバー19の操作位置を検出する植付昇降レバーセンサ92を設けており、該植付昇降レバーセンサ92の検出が制御部となる制御ボックス93に入力され、この入力に基づいて前記制御ボックス93から電磁式の油圧切替バルブ91ヘ信号が出力されて、油圧切替バルブ91が苗植付部7を昇降させる構成となっている。また、苗植付部7のセンタフロート24には該フロート24の上下回動位置を検出するフロートセンサ94を設けており、該フロートセンサ94により苗植付部7の対地高さを検出し、このフロートセンサ94の検出が制御ボックス93に入力され、この入力に基づいて苗植付部7を所望の対地高さとするべく前記制御ボックス93から油圧切替バルブ91ヘ信号が出力されて苗植付部7を昇降させる構成となっている。従って、通常の植付作業時には、フロートセンサ94の検出に基づいて苗植付部7が所望の対地高さとなるよう昇降制御される。また、上下フレーム77には昇降リンク機構17の上下回動位置を検出する昇降リンクセンサ95を設けており、該昇降リンクセンサ95の検出が制御ボックス93へ入力され、植付昇降レバー19により苗植付部7の上昇操作をしているとき、昇降リンクセンサ95の検出が苗植付部7の最上昇位置に相当する検出値に到達すると、制御ボックス93からの出力により油圧切替バルブ91を中立位置に切り替えて苗植付部7の上昇を停止させる構成となっている。
By the way, the pressure oil discharged from the hydraulic pump 90 is supplied to the electromagnetic hydraulic switching valve 91, and the hydraulic oil is switched to the single-acting lifting hydraulic cylinder 18 by switching the oil passage in the hydraulic switching valve 91. The seedling planting section 7 is switched to the ascending state, or the pressure oil in the lifting hydraulic cylinder 18 is returned to the mission case 30 that also serves as a hydraulic tank by the weight of the seedling planting section 7 and the seedling planting section 7 is lowered. It is the structure which switches to the state to perform. Therefore, the seedling planting part 7 can be moved up and down by the operation of the hydraulic pressure switching valve 91. And the planting raising / lowering lever sensor 92 which detects the operation position of the planting raising / lowering lever 19 for raising / lowering the seedling planting part 7 is provided, and detection of this planting raising / lowering lever sensor 92 becomes a control part. Based on this input, a signal is output from the control box 93 to the electromagnetic hydraulic switching valve 91 based on this input, and the hydraulic switching valve 91 moves the seedling planting part 7 up and down. The center float 24 of the seedling planting section 7 is provided with a float sensor 94 that detects the vertical rotation position of the float 24. The float sensor 94 detects the height to the ground of the seedling planting section 7, The detection of the float sensor 94 is input to the control box 93. Based on this input, a signal is output from the control box 93 to the hydraulic pressure switching valve 91 so that the seedling planting section 7 has a desired ground height, and seedling planting is performed. The part 7 is configured to move up and down. Therefore, during normal planting work, the raising / lowering control is performed based on the detection of the float sensor 94 so that the seedling planting unit 7 has a desired ground height. Further, the vertical frame 77 is provided with a vertical link sensor 95 that detects the vertical rotation position of the vertical link mechanism 17, and the detection of the vertical link sensor 95 is input to the control box 93, and the seedling lift lever 19 seeds the seedling. When the raising operation of the planting unit 7 is performed, when the detection of the lifting link sensor 95 reaches a detection value corresponding to the highest raising position of the seedling planting unit 7, the hydraulic pressure switching valve 91 is turned on by the output from the control box 93. It is the structure which switches to the neutral position and stops the raising of the seedling planting part 7.
また、ペダル保持装置がブレーキペダル(クラッチペダル)32を踏み込み操作状態(制動状態)で保持した状態であることを検出するペダル保持検出器を設けている。尚、このペダル保持検出器が、走行停止手段により走行停止操作が行われたことを検出する走行停止操作検出器となる。具体的には、ペダル保持アーム100をブレーキペダル(クラッチペダル)32を保持するために該ブレーキペダル(クラッチペダル)32側に回動させたことを検出するペダル保持アームセンサ96を設けている。そして、該ペダル保持アームセンサ96により走行停止状態で保持されていることが検出されて制御ボックス93ヘ入力されると、昇降リンクセンサ95の検出に応じて、制御ボックス93内において昇降リンクセンサ95の検出が苗植付部7を若干対地浮上させた所定の上下位置に相当する検出値より上位か下位かを判断し、苗植付部7が所定の上下位置より上位である場合は、制御ボックス93からの出力で油圧切替バルブ91を介して苗植付部7を前記所定の上下位置まで下降させて停止し、苗植付部7が所定の上下位置より下位である場合は、制御ボックス93からの出力で油圧切替バルブ91を介して苗植付部7を前記所定の上下位置まで上昇させて停止する。尚、前記所定の上下位置は、苗植付部7の苗載タンク20の前端(上端)が施肥装置8の肥料タンク9の上面より若干上側へ突出する上下位置(高さ)で、苗植付部7が若干対地浮上する上下位置(高さ)に設定されており、走行車輌側から前記肥料タンク9が邪魔にならずに苗載タンク20へ容易に苗補給ができる位置に設定されている。
Further, a pedal holding detector that detects that the pedal holding device is holding the brake pedal (clutch pedal) 32 in the depressed operation state (braking state) is provided. The pedal holding detector serves as a travel stop operation detector that detects that the travel stop operation has been performed by the travel stop means. Specifically, a pedal holding arm sensor 96 that detects that the pedal holding arm 100 is rotated toward the brake pedal (clutch pedal) 32 in order to hold the brake pedal (clutch pedal) 32 is provided. When it is detected by the pedal holding arm sensor 96 that the pedal is held in the travel stop state and is input to the control box 93, the lifting link sensor 95 is detected in the control box 93 in response to the detection of the lifting link sensor 95. It is determined whether the detection is higher or lower than a detection value corresponding to a predetermined vertical position where the seedling planting unit 7 is slightly lifted from the ground. If the seedling planting unit 7 is higher than the predetermined vertical position, control is performed. When the seedling planting portion 7 is lowered to the predetermined vertical position by the output from the box 93 and stopped through the hydraulic switching valve 91, and the seedling planting portion 7 is lower than the predetermined vertical position, the control box The seedling planting part 7 is raised to the predetermined vertical position via the hydraulic pressure switching valve 91 by the output from 93 and stopped. The predetermined vertical position is a vertical position (height) at which the front end (upper end) of the seedling tank 20 of the seedling planting unit 7 protrudes slightly above the upper surface of the fertilizer tank 9 of the fertilizer application device 8. The attaching part 7 is set to a vertical position (height) at which the surface 7 floats slightly to the ground, and the fertilizer tank 9 is set to a position where the seedling tank 20 can be easily replenished without being disturbed from the traveling vehicle side. Yes.
以上により、この田植機1は、苗を搭載する苗載台となる苗載タンク20を備える苗植付部7を、昇降機構となる昇降リンク機構17により走行車輌に対して昇降可能に設け、走行車輌の走行を停止させる操作をするための走行停止手段となるブレーキペダル(クラッチペダル)32と、該ブレーキペダル(クラッチペダル)32により走行停止操作が行われたことを検出する走行停止操作検出器となるペダル保持アームセンサ96とを設け、該ペダル保持アームセンサ96による走行停止操作の検出に基づいて昇降リンク機構17を作動させて苗植付部7を所定の上下位置まで上昇又は下降させる制御装置(制御ボックス93)を設けている。
As described above, the rice transplanter 1 is provided with the seedling planting portion 7 including the seedling mounting tank 20 serving as a seedling mounting table on which the seedling is mounted so as to be movable up and down with respect to the traveling vehicle by the lifting link mechanism 17 serving as a lifting mechanism. A brake pedal (clutch pedal) 32 serving as a travel stop means for performing an operation of stopping travel of the traveling vehicle, and travel stop operation detection for detecting that the travel stop operation has been performed by the brake pedal (clutch pedal) 32 A pedal holding arm sensor 96 is provided, and the raising / lowering link mechanism 17 is operated based on detection of the travel stop operation by the pedal holding arm sensor 96 to raise or lower the seedling planting portion 7 to a predetermined vertical position. A control device (control box 93) is provided.
従って、この田植機1は、苗載タンク20上に苗を搭載した状態で、走行車輌を走行させながら苗植付部7の植付装置22により苗載タンク20上の苗を圃場に植え付けていく。そして、走行車輌に搭乗する作業者が苗植付部7の苗載タンク20へ苗補給をするために、ペダル保持アームセンサ96による走行停止操作で、機体の走行を停止させて植付作業を中断することができる。このとき、制御ボックス93内の制御により、昇降リンク機構17を作動させて苗植付部7が苗補給がし易い所定の上下位置まで自動的に上昇又は下降する。
Therefore, the rice planting machine 1 plantes the seedlings on the seedling mounting tank 20 in the field by the planting device 22 of the seedling planting unit 7 while the traveling vehicle is traveling with the seedlings mounted on the seedling mounting tank 20. Go. Then, in order for an operator who is boarding the traveling vehicle to replenish seedlings into the seedling mounting tank 20 of the seedling planting unit 7, the traveling of the aircraft is stopped by the traveling stop operation by the pedal holding arm sensor 96, and the planting operation is performed. Can be interrupted. At this time, by the control in the control box 93, the elevating link mechanism 17 is operated, and the seedling planting unit 7 is automatically raised or lowered to a predetermined vertical position where the seedling planting part 7 can be easily replenished.
よって、ペダル保持アームセンサ96による走行停止操作に基づいて、自動的に苗植付部7が苗補給し易い所定の上下位置に上昇又は下降するので、作業能率が向上すると共に、植付作業走行中に誤って苗植付部7が上昇又は下降して苗植付が行えずに圃場に未植付区域が生じるようなことを防止できる。
Therefore, since the seedling planting part 7 is automatically raised or lowered to a predetermined vertical position where it is easy to replenish seedlings based on the travel stop operation by the pedal holding arm sensor 96, the work efficiency is improved and the planting work traveling is improved. It is possible to prevent the seedling planting part 7 from being raised or lowered by mistake and not planting seedlings, thereby causing an unplanted area in the field.
特に、苗補給作業をするためにブレーキペダル(クラッチペダル)32を踏み込み操作状態(制動状態)で保持した場合のみ、苗植付部7が所定の上下位置まで昇降し、ブレーキペダル(クラッチペダル)32のみによる走行停止操作がなされたときは、上記のように苗植付部7が所定の上下位置まで自動的に昇降することが無いので、圃場内で局部的に凹凸があって危険を回避する場合や圃場への苗の植付状態を確認する場合等にオペレータ(作業者)が一時的に走行停止したときに無闇に苗植付部7を昇降することがなく、安全に苗植付作業を行えると共に、圃場への苗の植付状態を容易に確認することができる。
In particular, only when the brake pedal (clutch pedal) 32 is depressed and held in the operation state (braking state) in order to perform seedling replenishment work, the seedling planting part 7 is raised and lowered to a predetermined vertical position, and the brake pedal (clutch pedal) When the traveling stop operation is performed only by 32, the seedling planting part 7 does not automatically move up and down to a predetermined vertical position as described above, so there is a local unevenness in the field to avoid danger. When the operator (worker) temporarily stops traveling, for example, when checking the planting state of the seedlings on the farm field, the seedling planting part 7 is not lifted up and down, and the seedlings can be planted safely. The work can be performed and the planting state of the seedlings on the field can be easily confirmed.
尚、走行停止からすばやく苗補給作業を開始するために、ブレーキペダル(クラッチペダル)32による走行停止操作を検出する検出器を設け、該検出器の検出に基づいて苗植付部7を所定の上下位置まで昇降させる構成としてもよい。これにより、苗補給の作業能率が向上する。
In addition, in order to start the seedling replenishment work quickly after the stop of the travel, a detector for detecting the travel stop operation by the brake pedal (clutch pedal) 32 is provided, and the seedling planting unit 7 is set to a predetermined position based on the detection of the detector. It is good also as a structure which raises / lowers to an up-down position. Thereby, the work efficiency of seedling supply improves.
また、フロントカバー5の後側下部には、ミッションケース30内のギヤの切替により、路上等で高速で走行するための路上走行速と、圃場内等で低速で走行するための植付作業速と、圃場の畦越え時やトラックへの積込時等で超低速で走行するための超低速とに走行速度を切替できる副変速レバー97を設けている。この副変速レバー97の走行速度設定を検出する変速検出器を設け、該変速検出器により植付作業速に設定されていることを検出したときのみ、苗植付部7を所定の上下位置まで昇降させる構成とすれば、路上走行時、圃場の畦越え時あるいはトラックへの積込時等に苗植付部7が不意に昇降することを防止でき、安全である。
Further, on the rear lower part of the front cover 5, by switching gears in the mission case 30, a road traveling speed for traveling at a high speed on the road and a planting operation speed for traveling at a low speed on the field etc. And a sub-transmission lever 97 that can switch the traveling speed to an ultra-low speed for traveling at an ultra-low speed when the farm is over the ridge or when being loaded onto a truck. A shift detector for detecting the traveling speed setting of the auxiliary transmission lever 97 is provided, and the seedling planting portion 7 is moved to a predetermined vertical position only when the shift detector detects that the planting operation speed is set. If it is made to raise / lower, it can prevent that the seedling planting part 7 raises / lowers unexpectedly at the time of driving | running | working on a road, the time of the field crossing, or the loading to a truck, etc., and it is safe.
同様に、植付昇降レバーセンサ92により苗植付部7を駆動する植付状態に植付昇降レバー19を操作していることを検出したときのみ、苗植付部7を所定の上下位置まで昇降させる構成とすれば、路上走行時、圃場の畦越え時あるいはトラックへの積込時等に苗植付部7が不意に昇降することを防止でき、安全である。
Similarly, only when it is detected that the planting lift lever 19 is operated in the planting state in which the seedling planting unit 7 is driven by the planting lift lever sensor 92, the seedling planting unit 7 is brought to a predetermined vertical position. If it is made to raise / lower, it can prevent that the seedling planting part 7 raises / lowers unexpectedly at the time of driving | running | working on a road, the time of the field crossing, or the loading to a truck, etc., and it is safe.
尚、例えば前輪3又は後輪4が回転していることを検出する等する走行速度検出器を設け、該走行速度検出器により走行停止していることを検出すると、苗植付部7を所定の上下位置まで昇降させる構成としてもよい。これにより、確実に走行停止している場合のみ苗植付部7が所定の上下位置まで昇降することになり、苗植付部7が作動しないまま走行して圃場に未植付区域が生じるようなことを確実に防止できる。また、前述のブレーキペダル(クラッチペダル)32の操作に関連して苗植付部7を所定の上下位置まで昇降させる制御において、走行速度検出器により走行停止していることを検出したときのみ、苗植付部7を所定の上下位置まで昇降させる構成としてもよい。
For example, a traveling speed detector that detects that the front wheel 3 or the rear wheel 4 is rotating is provided, and when the traveling speed detector detects that the traveling is stopped, the seedling planting unit 7 is It is good also as a structure which raises / lowers to the up-and-down position. As a result, the seedling planting unit 7 moves up and down to a predetermined vertical position only when traveling is surely stopped, and the seedling planting unit 7 travels without being operated so that an unplanted area is generated in the field. This can be surely prevented. Further, in the control for raising and lowering the seedling planting portion 7 to a predetermined vertical position in relation to the operation of the brake pedal (clutch pedal) 32 described above, only when it is detected by the traveling speed detector that the traveling is stopped. It is good also as a structure which raises / lowers the seedling planting part 7 to a predetermined | prescribed vertical position.
また、田植機1において、機体旋回開始時にステアリングハンドル6の操作に基づいて自動的に苗植付部7の駆動を断つと共に該苗植付部7を上昇させ、機体が旋回終了直前の位置に到達したと判断されると自動的に苗植付部7を下降させ、その後、前植付行程での植え終わり位置と揃う位置に苗植付部7が到達したと判断されると自動的に苗植付部7の駆動を開始する自動旋回制御手段を構成することができる。この自動旋回制御手段により、旋回後の次植付行程のための苗植付部7の下降あるいは苗植付部7の駆動開始が自動的に行われ、機体旋回時にオペレータはステアリングハンドル6を操作するだけでよいので操作が容易となって操作性が向上する。尚、苗植付部7の下降あるいは苗植付部7の駆動開始のタイミングの判断は、前輪3又は後輪4の累積回転数を演算することによる走行距離に基づくものの他、経過時間や進行方位を検出する方位センサ等を利用して行うことができる。尚、機体旋回時に旋回内側の後輪4への動力を断つものの場合は、該旋回内側の後輪4の累積回転数に基づいて旋回行程におけるタイミングを判断すれば、車輪のスリップの影響を極力抑えることができて、精度良くタイミングを判断できる。
Further, in the rice transplanter 1, the seedling planting part 7 is automatically turned off and the seedling planting part 7 is raised based on the operation of the steering handle 6 at the start of the body turning, and the body is brought to a position immediately before the end of the turning. When it is determined that the seedling planting unit 7 has been reached, the seedling planting unit 7 is automatically lowered, and then, when it is determined that the seedling planting unit 7 has reached a position that matches the planting end position in the previous planting process, it is automatically performed. An automatic turning control unit that starts driving the seedling planting unit 7 can be configured. The automatic turning control means automatically lowers the seedling planting part 7 for the next planting process after turning or starts driving the seedling planting part 7, and the operator operates the steering handle 6 when turning the aircraft. Therefore, the operation becomes easy and the operability is improved. In addition, the judgment of the timing of the descent of the seedling planting unit 7 or the start of driving of the seedling planting unit 7 is based on the travel distance by calculating the cumulative number of rotations of the front wheels 3 or the rear wheels 4, as well as the elapsed time and progress. This can be performed using an orientation sensor or the like that detects the orientation. In the case of turning off the power to the rear wheel 4 inside the turn at the time of turning, the influence of the wheel slip is minimized if the timing in the turning stroke is judged based on the accumulated rotation speed of the rear wheel 4 inside the turn. The timing can be determined with high accuracy.
この自動旋回制御手段を設けた場合、圃場の畦際での回り植えを行うとき等特殊な植付パターンで植付作業をするときには自動旋回制御が行われないほうがよいので、自動旋回制御を入切する制御入切手段を設ける。このとき、制御入切手段により自動旋回制御が行う設定(入設定)されているときのみ、苗植付部7を所定の上下位置まで昇降させる構成としてもよい。これにより、前後進を繰り返して頻繁に走行停止操作を行う畦際での植付や畦を越えながらの植付等の特殊な植付作業時には、自動的に苗植付部7が昇降しないので、無闇に苗植付部7が昇降するようなことを防止できると共に、機体の重量バランスの変化による転倒等の危険を防止することができる。
When this automatic turning control means is provided, it is better not to perform automatic turning control when performing planting work with a special planting pattern, such as when planting around the edge of the field. A control on / off means for cutting is provided. At this time, it is good also as a structure which raises / lowers the seedling planting part 7 to a predetermined | prescribed up-and-down position only when the setting which performs automatic turning control by a control turning-on / off means (on-set). As a result, the seedling planting part 7 does not automatically move up and down during special planting operations such as planting at the time of dredging and frequent stopping operation by repeatedly moving forward and backward, and planting over the bush. In addition, it is possible to prevent the seedling planting part 7 from going up and down in the dark, and to prevent danger such as a fall due to a change in the weight balance of the airframe.
尚、苗植付部7を所定の上下位置まで昇降させる制御の牽制は、前述の変速検出器による牽制、植付昇降レバーセンサ92による牽制、走行速度検出器による牽制及び自動旋回制御の制御入切手段による牽制のうち、何れの牽制手段を組み合わせて併用してもよい。
In addition, the control of raising and lowering the seedling planting part 7 to a predetermined vertical position includes the above-described control by the shift detector, the control by the planting lift lever sensor 92, the control by the travel speed detector, and the automatic turning control. Of the checks by the cutting means, any of the checking means may be used in combination.
また、苗載タンク20上の苗が所定量以下に減少したことを検出する苗減少センサ98を設けているが、該苗減少センサ98が苗の減少を検出すると、走行速度を徐々に減速して最終的に走行停止させ、自動的に苗植付部7を所定の上下位置まで昇降させる構成としてもよい。このとき、変速レバー31とは別に、油圧式無段変速装置27を操作する電動モータ等の変速操作アクチュエータを設ければよい。具体的には、苗減少センサ98が苗の減少を検出したことが制御ボックス93内に入力されると、制御ボックス93内から変速操作アクチュエータに出力され該変速操作アクチュエータが油圧式無段変速装置27の変速比を変更して走行速度を徐々に減速して走行停止させ、走行停止したことを前述のような走行速度検出器が検出すると、前述のように自動的に苗植付部7を所定の上下位置まで昇降させる構成とする。これにより、苗載タンク20への苗補給が必要なときに、自動的に苗植付部7を所定の上下位置まで昇降させることができ、苗植付部7を無闇に昇降させるようなことを防止できると共に、苗載タンク20への苗補給を忘れて植付欠株を発生させるようなことを防止できる。また、苗補給をするにあたり、走行速度を徐々に減速するので、機体の急激な停止によりオペレータが投げ出されるようなことがなく安全である。尚、畦クラッチ(植付条ごとのクラッチ)により、田植機1の全植付条のうちの一部の植付条の植付装置22のみを停止して植付作業をする場合は、植付装置22を停止する植付条の苗載タンク20部分にはもともと苗を補給する必要がないので、畦クラッチレバーにより前記畦クラッチを切操作していることを畦クラッチレバーセンサが検出すると、上述の苗減少センサ98の検出に伴う苗植付部7を所定の上下位置まで昇降させる制御を禁止したり、植付作業をする植付条の苗載タンク20部分の苗減少センサ98のみの検出に基づいて苗植付部7を所定の上下位置まで昇降させる制御を行う構成とすればよい。また、この苗減少センサ98の検出に伴う苗植付部7を所定の上下位置まで昇降させる制御は、前述と同様に、変速検出器、植付昇降レバーセンサ92、走行速度検出器あるいは自動旋回制御の制御入切手段により牽制される構成としてもよく、これらの牽制手段の何れかを組み合わせて併用してもよい。
Further, a seedling reduction sensor 98 that detects that the seedling on the seedling loading tank 20 has decreased to a predetermined amount or less is provided. When the seedling reduction sensor 98 detects a decrease in seedling, the traveling speed is gradually reduced. It is good also as a structure which finally stops driving | running | working and raises / lowers the seedling planting part 7 to a predetermined | prescribed vertical position automatically. At this time, a speed change actuator such as an electric motor for operating the hydraulic continuously variable transmission 27 may be provided separately from the speed change lever 31. Specifically, when it is input into the control box 93 that the seedling reduction sensor 98 has detected the decrease in the seedling, it is output from the control box 93 to the speed change operation actuator, and the speed change operation actuator is a hydraulic continuously variable transmission. When the traveling speed detector as described above detects that the traveling has stopped, the seedling planting unit 7 is automatically activated as described above. It is set as the structure which raises / lowers to a predetermined up-and-down position. Thereby, when the seedling replenishment to the seedling mounting tank 20 is necessary, the seedling planting part 7 can be automatically raised and lowered to a predetermined vertical position, and the seedling planting part 7 is moved up and down silently. Can be prevented, and forgetting to replenish seedlings in the seedling mounting tank 20 and generating planting missing lines can be prevented. In addition, when the seedling is replenished, the traveling speed is gradually reduced, so that the operator is not thrown out due to a sudden stop of the aircraft, and it is safe. In addition, when planting work by stopping only the planting device 22 of some planting strips of all planting strips of the rice transplanter 1 by a saddle clutch (clutch for each planting strip), Since it is not necessary to replenish seedlings originally in the seedling mounting tank 20 portion of the planting line that stops the attaching device 22, when the 畦 clutch lever sensor detects that the 畦 clutch is being operated by the 畦 clutch lever, Control of raising and lowering the seedling planting part 7 to the predetermined vertical position accompanying the detection of the seedling reduction sensor 98 described above is prohibited, or only the seedling reduction sensor 98 of the seedling mounting tank 20 part of the planting strip for planting work is used. What is necessary is just to set it as the structure which performs control which raises / lowers the seedling planting part 7 to a predetermined | prescribed vertical position based on detection. In addition, the control for raising and lowering the seedling planting part 7 to the predetermined vertical position in accordance with the detection of the seedling reduction sensor 98 is the same as described above, the shift detector, the planting lift lever sensor 92, the traveling speed detector or the automatic turning. It is good also as a structure controlled by the control on-off means of control, and you may use together any one of these check means.
また、苗補給が終了した後、オペレータがペダル保持装置の保持を解除してブレーキペダル(クラッチペダル)32を元に戻すと、苗植付部7が接地するまで下降し、苗植付部7が接地すると、走行速度を徐々に増速して元の植付作業時の走行速度に復帰させる構成とすれば、植付再開に伴う操作を簡略できて作業性が向上すると共に、機体が急発進することなく安全に植付作業ができる。具体的には、検出器によるブレーキペダル(クラッチペダル)32の走行停止解除操作の検出又はペダル保持アームセンサ96によるペダル保持装置の保持の解除の検出に基づいて、油圧切替バルブ91により先ず苗植付部7を下降させ、フロートセンサ94が接地したことを検出すると、変速操作アクチュエータにより油圧式無段変速装置27を作動させて元の速度まで徐々に増速させる構成とする。これにより、苗植付部7が接地してから機体が前進し始める構成としたので、圃場に未植付区域を発生させないようにできる。尚、苗載タンク20への苗の補給に伴って、苗植付部7を下降させる構成とすれば、植付作業の再開を即座に行うことができ、作業能率が向上する。具体的には、苗載タンク20の各植付条部分の上部に各々苗の有無を検出する苗センサを設け、全ての植付条の苗センサが苗が有ることを検出すると、油圧切替バルブ91により苗植付部7を下降させる構成とすればよい。尚、前記苗センサに代えて、苗載タンク20の各植付条部分の間に設けた苗載タンク20に沿う電極を設け、前記各植付条部分の電気抵抗を検出することにより搭載された苗の量を判別できる苗量センサを使用し、該苗量センサの検出により苗載タンク20へ苗が補給されたことを判断してもよい。
Further, when the operator releases the holding of the pedal holding device and returns the brake pedal (clutch pedal) 32 after the seedling replenishment is completed, the operator lowers until the seedling planting portion 7 comes in contact with the ground, and the seedling planting portion 7 If it is configured that the traveling speed is gradually increased to return to the original traveling speed at the time of planting, the operation associated with resuming planting can be simplified, the workability can be improved, and the aircraft Planting can be done safely without starting. Specifically, based on the detection of the travel stop release operation of the brake pedal (clutch pedal) 32 by the detector or the detection of the release of the holding of the pedal holding device by the pedal holding arm sensor 96, the hydraulic switching valve 91 is used to start seedling planting. When the attachment portion 7 is lowered and it is detected that the float sensor 94 is grounded, the hydraulic continuously variable transmission 27 is operated by the speed change actuator to gradually increase the speed to the original speed. Thereby, since it was set as the structure which the airframe begins to advance after the seedling planting part 7 earth | grounds, it can prevent generating an unplanted area in a farm field. In addition, if it is set as the structure which descends the seedling planting part 7 with the replenishment of the seedling to the seedling mounting tank 20, a planting operation | work can be restarted immediately and work efficiency will improve. Specifically, a seedling sensor for detecting the presence or absence of seedlings is provided at the top of each planting strip portion of the seedling loading tank 20, and when the seedling sensors of all planting strips detect that seedlings are present, a hydraulic switching valve The seedling planting unit 7 may be lowered by 91. In addition, it replaces with the said seedling sensor, and provides the electrode along the seedling mounting tank 20 provided between each planting strip part of the seedling mounting tank 20, and it mounts by detecting the electrical resistance of each said planting strip part. A seedling amount sensor capable of discriminating the amount of seedlings may be used, and it may be determined that seedlings have been supplied to the seedling mounting tank 20 by detection of the seedling amount sensor.
また、前記苗量センサによる苗載タンク20上の苗量の検出に基づいて、苗量が多いときには通常植付作業時の苗植付部7の昇降制御の制御感度を鈍感に補正し、逆に苗量が少ないときには通常植付作業時の苗植付部7の昇降制御の制御感度を敏感に補正する感度補正制御を行うことができる。これにより、苗量が多く苗植付部7全体の重量が大きいときは、苗植付部7の昇降作動により昇降リンク機構17と昇降用油圧シリンダ18との間に設けた圧縮スプリングが大きく伸縮して昇降制御にハンチングが生じ易いが、このハンチングを抑えることができる。逆に、苗量が少なく苗植付部7全体の重量が小さいときは、苗植付部7の昇降作動により前記圧縮スプリングが伸縮が少なく昇降制御にハンチングが生じにくいので、制御感度を敏感にして昇降制御を高精度に行うことができる。尚、昇降制御の制御感度を変更する手段としては、フロートセンサ94の制御目標を変更したり(制御目標をフロートが前上がり側となるよう変更すれば鈍感になる)、フロートセンサ94の不感帯幅を変更したり、フロートセンサ94が検出するフロート24の押下荷重を変更したり(フロート24を下側へ付勢するスプリングの付勢力を変更する)、油圧切替バルブ91により昇降用油圧シリンダ18に対して給排する圧油の流量を変更したりする手段がある。
Further, based on the detection of the amount of seedlings on the seedling loading tank 20 by the seedling amount sensor, when the amount of seedlings is large, the control sensitivity of the raising / lowering control of the seedling planting unit 7 at the time of normal planting work is corrected insensitively and vice versa. When the amount of seedlings is small, sensitivity correction control for sensitively correcting the control sensitivity of the raising / lowering control of the seedling planting unit 7 during normal planting work can be performed. Thereby, when the amount of seedlings is large and the weight of the seedling planting part 7 is large, the compression spring provided between the lifting link mechanism 17 and the lifting hydraulic cylinder 18 is greatly expanded and contracted by the lifting operation of the seedling planting part 7. Thus, hunting is likely to occur in the elevation control, but this hunting can be suppressed. Conversely, when the amount of seedlings is small and the weight of the seedling planting part 7 as a whole is small, the compression springs are not expanded and contracted by the raising / lowering operation of the seedling planting part 7 and hunting is not easily generated in the raising / lowering control. Thus, the elevation control can be performed with high accuracy. As a means for changing the control sensitivity of the lift control, the control target of the float sensor 94 is changed (it becomes insensitive if the control target is changed so that the float is on the front side), or the dead band width of the float sensor 94 is set. Or the pressing load of the float 24 detected by the float sensor 94 is changed (the urging force of the spring that urges the float 24 downward is changed), and the hydraulic switching valve 91 is used to move the lifting hydraulic cylinder 18 On the other hand, there is a means for changing the flow rate of pressure oil supplied and discharged.
また、苗量センサによる苗載タンク20上の苗量の検出に基づいて、油圧切替バルブ91により苗植付部7の下降時に昇降用油圧シリンダ18から排出する圧油の流量を変更して、苗量に拘らず苗植付部7の下降速度を均一にすることができる。これにより、自動旋回制御における苗植付部7の下降で、旋回行程における苗植付部が接地するタイミングを揃えることができ、以後の植付開始を円滑に行える。
Further, based on the detection of the amount of seedlings on the seedling loading tank 20 by the seedling amount sensor, the flow rate of the pressure oil discharged from the lifting hydraulic cylinder 18 when the seedling planting unit 7 is lowered by the hydraulic pressure switching valve 91 is changed, Regardless of the amount of seedlings, the descending speed of the seedling planting part 7 can be made uniform. As a result, when the seedling planting part 7 is lowered in the automatic turning control, the timing at which the seedling planting part contacts the ground in the turning process can be aligned, and subsequent planting can be started smoothly.
ところで、前述の自動旋回制御における旋回時の苗植付部7の上昇位置を、苗補給のための前記所定の上下位置と同一としてもよい。これにより、自動旋回制御において、苗植付部7を対地浮上させる程度に上昇させて不必要に上昇させないようにでき、機体の重量バランスが悪化するようなことを防止できると共に、次植付行程のための苗植付部7の下降により該苗植付部7を早く接地させることができ、次植付行程の植付開始を円滑に行える。
By the way, the raising position of the seedling planting unit 7 at the time of turning in the automatic turning control described above may be the same as the predetermined vertical position for seedling replenishment. Thus, in the automatic turning control, the seedling planting part 7 can be raised to the extent that the seedling planting part 7 is levitated to the ground, and can be prevented from being unnecessarily raised, and the weight balance of the aircraft can be prevented from deteriorating, and the next planting process By descending the seedling planting part 7 for the purpose, the seedling planting part 7 can be grounded quickly, and the planting start of the next planting process can be smoothly performed.
また、苗植付部7は、前後方向のローリング軸99により走行車輌に対して左右にローリング可能に装着され、走行車輌側との間にスプリングを介在させて走行車輌が左右に傾斜しても左右水平となるように制御するローリング機構を備えている。ところが、苗補給のために苗植付部7を対地浮上する所定の上下位置に上昇又は下降させると、前記スプリングが伸縮することにより苗植付部7が自由にローリングし、苗載タンク20への苗補給が行いにくくなる。そこで、前述の苗補給のための苗植付部7を所定の上下位置まで昇降させる制御がなされたときは、これに連動して苗植付部7の左右ローリングを規制するローリング規制装置を作動させ、苗植付部7を走行車輌に対して平行となる姿勢に固定する構成としてもよい。これにより、苗補給する際に苗植付部7が左右にローリングせずに固定されるので、苗補給が容易になる。尚、前記ローリング規制装置は、電動アクチュエータの作動で走行車輌側から突出する部材を苗植付部7側の部材に接触させる等して、苗植付部7の左右ローリングを規制する構成とすればよい。
The seedling planting part 7 is mounted so as to be able to roll to the left and right with respect to the traveling vehicle by a rolling shaft 99 in the front-rear direction, and even if the traveling vehicle is inclined to the left and right by interposing a spring between the traveling vehicle side. It has a rolling mechanism that controls it horizontally. However, when the seedling planting part 7 is raised or lowered to a predetermined vertical position where the seedling planting part 7 floats to the ground for replenishing seedlings, the seedling planting part 7 freely rolls due to the expansion and contraction of the spring, and enters the seedling mounting tank 20. It becomes difficult to replenish seedlings. Therefore, when the above-described control for raising and lowering the seedling planting part 7 for replenishing seedlings is performed to a predetermined vertical position, the rolling regulation device that regulates the right and left rolling of the seedling planting part 7 is operated in conjunction with this control. The seedling planting unit 7 may be configured to be fixed in a posture parallel to the traveling vehicle. Thereby, since seedling planting part 7 is fixed without rolling right and left when seedling is replenished, replenishment of seedling is facilitated. The rolling restricting device is configured to restrict the right and left rolling of the seedling planting part 7 by, for example, bringing a member protruding from the traveling vehicle side into contact with a member on the seedling planting part 7 side by operating an electric actuator. That's fine.
尚、前記ローリング機構は、苗植付部7の左右傾斜姿勢を検出する姿勢検出センサを設け、該姿勢検出センサの検出に基づいて苗植付部7が左右水平姿勢となるよう電動モータ等のローリングアクチュエータにより強制的に苗植付部7を左右ローリング作動させるローリング制御を備えた構成とすることができる。このとき、苗量センサにより苗載タンク20の各植付条ごとの苗量を検出し、苗植付部7全体の重量の左右アンバランスの度合を判定し、この判定に基づいて前記ローリング制御における姿勢検出センサの制御目標を補正する構成とすればよい。すなわち、苗植付部7全体の重心が左寄りであれば姿勢検出センサの制御目標を苗植付部7が右下がりになるように補正し、逆に苗植付部7全体の重心が右寄りであれば姿勢検出センサの制御目標を苗植付部7が左下がりになるように補正し、苗植付部7全体の重心と重量とによるモーメントが大きい場合は、姿勢検出センサの制御目標の補正量を大きくする。これにより、苗植付部7全体の重量の左右アンバランスによりローリング機構のスプリングが伸縮しても、苗植付部7の重量に影響されずに、苗植付部7を所望の左右水平姿勢へ維持しやすくなる。
The rolling mechanism is provided with a posture detection sensor for detecting the right / left inclined posture of the seedling planting unit 7, and an electric motor or the like such that the seedling planting unit 7 assumes a horizontal horizontal posture based on the detection of the posture detection sensor. It can be set as the structure provided with the rolling control which forcibly carries out the rolling operation of the seedling planting part 7 right and left with a rolling actuator. At this time, the seedling amount sensor detects the amount of seedling for each planting line of the seedling loading tank 20, determines the degree of left-right unbalance of the weight of the entire seedling planting unit 7, and based on this determination, the rolling control The configuration may be such that the control target of the posture detection sensor in is corrected. That is, if the center of gravity of the entire seedling planting part 7 is to the left, the control target of the posture detection sensor is corrected so that the seedling planting part 7 is lowered to the right. If there is, correct the control target of the posture detection sensor so that the seedling planting unit 7 is lowered to the left, and if the moment due to the center of gravity and the weight of the entire seedling planting unit 7 is large, correct the control target of the posture detection sensor Increase the amount. Thereby, even if the spring of the rolling mechanism expands and contracts due to the left / right imbalance of the weight of the entire seedling planting part 7, the seedling planting part 7 is placed in a desired horizontal horizontal posture without being affected by the weight of the seedling planting part 7. Easy to maintain.