JP4955115B2 - 方位角計測装置、および、方位角計測方法 - Google Patents
方位角計測装置、および、方位角計測方法 Download PDFInfo
- Publication number
- JP4955115B2 JP4955115B2 JP2011089107A JP2011089107A JP4955115B2 JP 4955115 B2 JP4955115 B2 JP 4955115B2 JP 2011089107 A JP2011089107 A JP 2011089107A JP 2011089107 A JP2011089107 A JP 2011089107A JP 4955115 B2 JP4955115 B2 JP 4955115B2
- Authority
- JP
- Japan
- Prior art keywords
- dimensional data
- data
- dimensional
- filter
- offset
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Description
本発明の第1の実施の形態を、図1〜図5に基づいて説明する。
図1は、方位角計測装置100の構成を示す。
本装置の動作について説明する。
図2は、歩行時におけるオフセット推定のフローチャートを示す。
ステップS4では、その推定されたオフセット候補の信頼性を評価する。オフセット候補は、例えば推定された直近の所定数のオフセット候補群のばらつきで評価される。
オフセット候補群のばらつきが所定数以下であれば、ステップS5に進み、所定数を超えていれば、オフセットは更新されない。ばらつきは、データ分布を表現できる指標を用いればよく、例えば、オフセット候補群の各軸の最大値と最小値の差、あるいは、各軸の標準偏差、等を用いることができる。
ステップS5では、直近のオフセット候補が新たなオフセットとして採用され、オフセットが更新される。
図3は、自動車内設置時におけるオフセット推定のフローチャートを示す。
この処理では、前述した図2の歩行時オフセット推定のフローチャートに比べて、オフセット計算用フィルタ部2および方位角計算用フィルタ部5による処理が付加されている。
自動車内部は、歩行時の磁気環境に比べて、遥かにノイズが多く、また大きい(携帯端末を設置する場所により異なるが、通常カーナビが設置されるようなインスツルメンタルパネル付近では、自動車自身が発生しているノイズ〜10uT(参考値)、踏み切りや構造物による外乱ノイズ〜100uT(参考値))。特許文献1で開示されている方法では、携帯端末が大きな立体角を動いたときに取得されたデータ群を用いてオフセットを推定した方が精度がよい。
オフセットが計算されると、測定値からオフセットを差し引くことよって、地磁気を算出することができる。その算出された地磁気から方位角が計算されるが、オフセット計算時と同様の理由により、測定値をそのまま用いると、ノイズにより不必要に方位角算出値が変動してしまう。
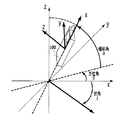
方位角の計算の1例について説明する。

慣例により、方位角は、−θによって与えられる。
携帯機器を水平に設置(測定Z軸を鉛直上向きに一致)したときの測定値Mmは、
携帯機器が、ピッチ角φ、ロール角ηで設置され、自動車が水平面を進行したときの地
磁気測定値Mmの分布は、
本発明の第2の実施の形態を、図6〜図11に基づいて説明する。なお、前述した第1の例と同一部分については、その説明を省略し、同一符号を付す。
図6は、オフセット計算用フィルタ部2をオフセット用変化量制限フィルタにより構成した場合におけるフィルタ処理のフローチャートを示す。
実際の地磁気測定値は、A1、A2、A3、A4の各点をつなぐ実線で示す軌跡として表される。これに対して、フィルタ後の地磁気データは、B1、B2、B3の各点をつなぐ破線で示す制限された軌跡として表される。
図8は、オフセット計算用フィルタ部2をオフセット用領域内平均フィルタにより構成した場合におけるフィルタ処理のフローチャートを示す。
を満たす領域である。
図11は、オフセット計算用フィルタ部2をオフセット用平面データ選択フィルタにより構成した場合におけるフィルタ処理のフローチャートを示す。
この場合、所定の個数Nの地磁気データからなるデータ群のうち、1番古いデータを次の出力としてもよい。
本発明の第3の実施の形態を、図12〜図13に基づいて説明する。なお、前述した各例と同一部分については、その説明を省略し、同一符号を付す。
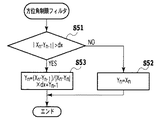
図12は、方位角計算用フィルタ部5を方位角用変化量制限フィルタにより構成した場合におけるフィルタ処理のフローチャートを示す。
図13は、方位角計算用フィルタ部5を方位角用領域内平均フィルタにより構成した場合におけるフィルタ処理のフローチャートを示す。
2 オフセット計算用フィルタ部
3 データ取捨選択部
4 オフセット算出部
5 方位角計算用フィルタ部
6 方角計算部
7 地磁気オフセット格納部
8 携帯端末設置姿勢格納部
9 傾斜角センサ
100 方位角計測装置
200,201 特定領域
Claims (14)
- 3軸各軸の地磁気を検出する地磁気検出手段と、
前記地磁気検出手段により検出された3軸各軸の地磁気データに基づき得られる3次元データを所定の基準に基づいて補正し、該補正により得られた3次元補正データを出力するフィルタ手段と、
前記フィルタ手段から出力された前記3次元補正データに基づき、オフセットを算出するオフセット算出手段と、
前記オフセット算出手段により算出された前記オフセットと、前記フィルタ手段から出力された前記3次元補正データとに基づき、方位角を算出する方位角算出手段と
を具え、
前記フィルタ手段は、
領域内平均化手段を備え、前記領域内平均化手段は、該領域内平均化手段に新たに入力された3次元データが、特定領域内に存在するか否かを判断する手段と、
前記新たに入力された3次元データが、前記特定領域内に存在すると判断したとき、該特定領域内の3次元データの平均値又は中央値を計算し、該計算により得られた値を3次元補正データとして出力する手段と、
前記新たに入力された3次元データが前記特定領域内に存在しないと判断したとき、該新たに入力された3次元データを3次元補正データとして出力し、前記特定領域内に存在する3次元データを破棄し、前記特定領域を該新たに入力された3次元データに基づいて再設定する手段と
を具えたことを特徴とする方位角計測装置。 - 前記フィルタ手段は、
変化量制限手段を備え、前記変化量制限手段は、該変化量制限手段に新たに入力された3次元データと、該変化量制限手段が直前に出力した3次元データとの距離が所定の閾値内に存在するか否かを判断する手段と、
前記距離が前記所定の閾値以下の場合は、前記新たに入力された3次元データを次の出力とする手段と、
前記距離が前記所定の閾値を越える場合は、前記直前の3次元データと前記最新の3次元データとの中間点で、かつ、該直前の3次元データからの距離が所定の値である点を次の出力する手段と
を有し、変化量制限手段からの出力が前記領域内平均化手段に入力されることを特徴とする請求項1記載の方位角計測装置。 - 3軸各軸の地磁気を検出する地磁気検出手段と、
前記地磁気検出手段により検出された3軸各軸の地磁気データに基づき得られる3次元データを所定の基準に基づいて補正し、該補正により得られた3次元補正データを出力するフィルタ手段と、
前記フィルタ手段から出力された前記3次元補正データに基づき、オフセットを算出するオフセット算出手段と、
前記オフセット算出手段により算出された前記オフセットと、前記フィルタ手段から出力された前記3次元補正データとに基づき、方位角を算出する方位角算出手段と
を具え、
前記フィルタ手段は、
領域内平均化手段を備え、前記領域内平均化手段は、該領域内平均化手段に新たに入力された3次元データが、特定領域内に存在するか否かを判断する手段と、
前記新たに入力された3次元データが、前記特定領域外に存在すると判断したとき、該特定領域外となるまでの連続して特定領域内に存在するときの3次元データの平均値又は中央値を計算し、該計算により得られた値を3次元補正データとして出力すると共に、前記連続して特定領域内に存在するときの3次元データを破棄し、前記特定領域を前記新たに入力された3次元データに基づいて再設定する手段と
を具えたことを特徴とする方位角計測装置。 - 前記特定領域は、所定の中心点を中心とする閉じられた領域であり、該中心点は前記フィルタ手段に新たに入力された3次元データにより変化することを特徴とする請求項1ないし3のいずれか記載の方位角計測装置。
- 前記特定領域は、立方体又は18面体によって囲まれる領域であることを特徴とする請求項1ないし4のいずれかに記載の方位角計測装置。
- 前記フィルタ手段は、
前記フィルタ手段に新たに連続して入力された所定の個数N(ただし、Nは正の整数)の3次元データからなる3次元データ群の、所定の平面からの距離のばらつきが、所定の範囲内に存在するか否かを判断する手段と、
前記距離のばらつきが所定の範囲内に存在すると判断したとき、前記所定の個数Nの3次元データからなる3次元データ群のうち、M番目(ただし、Mは正の整数)に古い3次元データを次の出力とする手段と
を有する平面データ選択手段
を具えたことを特徴とする請求項1ないし5のいずれかに記載の方位角計測装置。 - 前記平面データ選択手段は、
前記所定の個数Nの3次元データからなる3次元データ群のうち、1番古い3次元データを次の出力とすることを特徴とする請求項6記載の方位角計測装置。 - 3軸各軸の地磁気を検出する工程と、
前記検出された3軸各軸の地磁気データに基づき得られる3次元データを所定の基準に基づいて補正し、該補正により得られた3次元補正データを出力するフィルタ工程と、
前記出力された前記3次元補正データに基づき、前記オフセットを算出するオフセット算出工程と、
前記算出された前記オフセットと、前記出力された前記3次元補正データとに基づき、前記方位角を算出する方位角算出工程と
を具え、
前記フィルタ工程は、
フィルタに新たに入力された3次元データが、特定領域内に存在するか否かを判断する工程と、
前記新たに入力された3次元データが、前記特定領域内に存在すると判断したとき、該特定領域内の3次元データの平均値又は中央値を計算し、該計算により得られた値を3次元補正データとして出力する工程と、
前記新たに入力された3次元データが前記特定領域内に存在しないと判断したとき、該新たに入力された3次元データを出力し、前記特定領域内に存在する3次元データを破棄し、前記特定領域を該新たに入力された3次元データに基づいて再設定する工程と
を有する領域内平均化工程
を具えたことを特徴とする方位角計測方法。 - 前記フィルタ工程は、
フィルタに新たに入力された3次元データと、該フィルタが直前に出力した3次元データとの距離が所定の閾値内に存在するか否かを判断する工程と、
前記距離が前記所定の閾値以下の場合は、前記新たに入力された3次元データを次の出力とする工程と、
前記距離が前記所定の閾値を越える場合は、前記直前のデータと前記最新の3次元データとの中間点で、かつ、該直前の3次元データからの距離が所定の値である点を次の出力する工程と
を有する変化量制限工程
を具え、前記変化量制限工程の出力が前記領域内平均化工程に入力されることを特徴とする請求項8記載の方位角計測方法。 - 前記フィルタ工程は、
フィルタに新たに入力された3次元データが、特定領域内に存在するか否かを判断する工程と、
前記新たに入力された3次元データが、前記特定領域外に存在すると判断したとき、該特定領域外となるまでの連続して特定領域内に存在するときの3次元データの平均値又は中央値を計算し、該計算により得られた値を補正3次元データとして出力すると共に、前記連続して特定領域内に存在するときの3次元データを破棄し、前記特定領域を前記新たに入力された3次元データに基づいて再設定する工程と
を有する領域内平均化工程
を具えたことを特徴とする請求項8ないし9のいずれかに記載の方位角計測方法。 - 前記特定領域は、所定の中心点を中心とする閉じられた領域であり、該中心点は前記フィルタに新たに入力された3次元データにより変化することを特徴とする請求項10記載の方位角計測方法。
- 前記特定領域は、立方体又は18面体によって囲まれる領域であることを特徴とする請求項8ないし11のいずれかに記載の方位角計測方法。
- 前記フィルタ工程は、
前記フィルタに新たに連続して入力された所定の個数N(ただし、Nは正の整数)の3次元データからなる3次元データ群の、所定の平面からの距離のばらつきが、所定の範囲内に存在するか否かを判断する工程と、
前記距離のばらつきが所定の範囲内に存在すると判断したとき、前記所定の個数Nの3次元データからなる3次元データ群のうち、M番目(ただし、Mは正の整数)に古い3次元データを次の出力とする工程と
を有する平面データ選択工程
を具えたことを特徴とする請求項8ないし12のいずれかに記載の方位角計測方法。 - 前記平面データ選択工程は、
前記所定の個数Nの3次元データからなる3次元データ群のうち、1番古いデータを次の出力とすることを特徴とする請求項13記載の方位角計測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011089107A JP4955115B2 (ja) | 2011-04-13 | 2011-04-13 | 方位角計測装置、および、方位角計測方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011089107A JP4955115B2 (ja) | 2011-04-13 | 2011-04-13 | 方位角計測装置、および、方位角計測方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005159048A Division JP4988170B2 (ja) | 2005-05-31 | 2005-05-31 | 方位角計測装置、および、方位角計測方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011145306A JP2011145306A (ja) | 2011-07-28 |
| JP4955115B2 true JP4955115B2 (ja) | 2012-06-20 |
Family
ID=44460254
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011089107A Active JP4955115B2 (ja) | 2011-04-13 | 2011-04-13 | 方位角計測装置、および、方位角計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4955115B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101352245B1 (ko) | 2012-08-01 | 2014-01-17 | 충남대학교산학협력단 | Mems 지자기 센서의 방위각 보정 방법 및 장치 |
| CN109238262B (zh) * | 2018-11-05 | 2020-10-30 | 珠海全志科技股份有限公司 | 一种航向姿态解算及罗盘校准抗干扰方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0735974B2 (ja) * | 1992-01-08 | 1995-04-19 | 日産自動車株式会社 | 車両用方位計 |
| JPH05215553A (ja) * | 1992-02-03 | 1993-08-24 | Nec Home Electron Ltd | ナビゲーション装置 |
| JP3316889B2 (ja) * | 1992-02-05 | 2002-08-19 | 株式会社デンソー | 車両用方位検出装置 |
| JP2003042766A (ja) * | 2001-07-30 | 2003-02-13 | Japan Aviation Electronics Industry Ltd | 方位角計測装置 |
-
2011
- 2011-04-13 JP JP2011089107A patent/JP4955115B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011145306A (ja) | 2011-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5736106B2 (ja) | 移動状態検出装置 | |
| JP4908637B2 (ja) | 物理量計測装置および物理量計測方法 | |
| EP1653194B1 (en) | Azimuth/attitude detecting sensor | |
| US10337884B2 (en) | Method and apparatus for fast magnetometer calibration | |
| US9008996B2 (en) | Moving body positioning device | |
| EP2657920B1 (en) | Driving assist device | |
| US9234767B2 (en) | Running condition detection device, running condition detection method, and recording medium | |
| CN109186597B (zh) | 一种基于双mems-imu的室内轮式机器人的定位方法 | |
| US9599475B2 (en) | Movement state information calculation method and movement state information calculation device | |
| JP5602070B2 (ja) | 位置標定装置、位置標定装置の位置標定方法および位置標定プログラム | |
| JP2006113019A (ja) | 3軸型電子コンパス及びこれを用いた方位検出方法 | |
| WO2012137415A1 (ja) | 位置算出方法及び位置算出装置 | |
| CN106153069B (zh) | 自主导航系统中的姿态修正装置和方法 | |
| KR101006812B1 (ko) | 자기 데이터 처리 장치, 네비게이션 장치, 자기 데이터 처리 방법 및 자기 데이터 처리 프로그램을 포함하는 기계 판독가능 매체 | |
| US10197396B2 (en) | Always on compass calibration system and methods | |
| JP2016033473A (ja) | 位置算出方法及び位置算出装置 | |
| JP4590511B2 (ja) | 電子コンパス | |
| JP4988170B2 (ja) | 方位角計測装置、および、方位角計測方法 | |
| EP3227634B1 (en) | Method and system for estimating relative angle between headings | |
| JP4955115B2 (ja) | 方位角計測装置、および、方位角計測方法 | |
| WO2010030565A1 (en) | Magnetic sensing device for navigation and detecting inclination | |
| JP5475873B2 (ja) | 地磁気検知装置 | |
| JP2015004593A (ja) | ナビゲーション装置 | |
| CN113985466A (zh) | 一种基于模式识别的组合导航方法及系统 | |
| EP3047303A1 (en) | Method and apparatus for determination of misalignment between device and vessel using radius of rotation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111104 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120309 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120314 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4955115 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150323 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |