JP4933043B2 - 入力デバイスの移動を測定する方法 - Google Patents
入力デバイスの移動を測定する方法 Download PDFInfo
- Publication number
- JP4933043B2 JP4933043B2 JP2004509537A JP2004509537A JP4933043B2 JP 4933043 B2 JP4933043 B2 JP 4933043B2 JP 2004509537 A JP2004509537 A JP 2004509537A JP 2004509537 A JP2004509537 A JP 2004509537A JP 4933043 B2 JP4933043 B2 JP 4933043B2
- Authority
- JP
- Japan
- Prior art keywords
- input device
- laser
- scroll
- measurement
- action
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000033001 locomotion Effects 0.000 title claims description 98
- 230000009471 action Effects 0.000 claims description 164
- 230000005855 radiation Effects 0.000 claims description 104
- 238000005259 measurement Methods 0.000 claims description 97
- 238000000034 method Methods 0.000 claims description 73
- 230000003287 optical effect Effects 0.000 claims description 66
- 238000004458 analytical method Methods 0.000 claims description 26
- 230000008859 change Effects 0.000 claims description 20
- 230000004913 activation Effects 0.000 claims description 7
- 238000006243 chemical reaction Methods 0.000 claims description 3
- 230000005540 biological transmission Effects 0.000 claims description 2
- 230000036961 partial effect Effects 0.000 claims description 2
- 238000011896 sensitive detection Methods 0.000 claims description 2
- 238000004422 calculation algorithm Methods 0.000 description 41
- 230000000694 effects Effects 0.000 description 30
- 238000002156 mixing Methods 0.000 description 17
- 238000012545 processing Methods 0.000 description 16
- 230000005684 electric field Effects 0.000 description 12
- 239000000463 material Substances 0.000 description 12
- 230000008901 benefit Effects 0.000 description 8
- 230000006870 function Effects 0.000 description 8
- 229920003023 plastic Polymers 0.000 description 8
- 238000001514 detection method Methods 0.000 description 7
- 239000000835 fiber Substances 0.000 description 7
- 239000004033 plastic Substances 0.000 description 7
- 238000000354 decomposition reaction Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 230000005057 finger movement Effects 0.000 description 4
- 238000005286 illumination Methods 0.000 description 4
- 238000012544 monitoring process Methods 0.000 description 4
- 230000036962 time dependent Effects 0.000 description 4
- 230000006399 behavior Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 239000010410 layer Substances 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 239000004593 Epoxy Substances 0.000 description 2
- 230000001154 acute effect Effects 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 230000004069 differentiation Effects 0.000 description 2
- 238000004599 local-density approximation Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000000691 measurement method Methods 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 2
- 239000004926 polymethyl methacrylate Substances 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 238000011426 transformation method Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 101000878457 Macrocallista nimbosa FMRFamide Proteins 0.000 description 1
- 239000012790 adhesive layer Substances 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000010348 incorporation Methods 0.000 description 1
- 238000012905 input function Methods 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 238000000960 laser cooling Methods 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 239000012811 non-conductive material Substances 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 239000004417 polycarbonate Substances 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000011343 solid material Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- 238000010792 warming Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images

































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 2D relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
- G06F3/0421—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means by interrupting or reflecting a light beam, e.g. optical touch-screen
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
Description

− Kは、外部空洞への結合係数であり、レーザ空洞外で結合された放射線量を表している。
− νは、レーザ放射線の周波数である。
− vは、測定ビーム方向における物体の速さである。
− tは、時間モーメントである。
− cは、光速である。
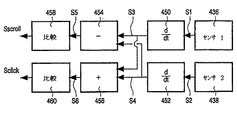
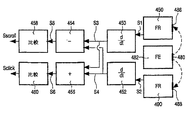
Vx=2S4−S6−S8
Vy=√3・(S8−S6)
Vz=1/√2・(S4+S6+S8)
この計算を実行する電子回路は、加算要素及び減算要素を有し、実施が比較的容易である。
Vscroll=1/2√2(Sign1−Sign2)
Vclick=1/2√2(Sign1+Sign2)
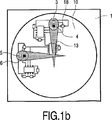
図11は、スクロール・アンド・クリック入力デバイス90の第二の実施形態を示す。この実施形態は、2つのレンズ70、72及び窓88が1つの構成要素92によって置き換えられている点で、図9及び10のものと異なる。この要素は、両方のビーム74、76の焦点を窓を構成するその上面94に合わせる。
− ユーザは、決してスクロールとクリックを同時には行わない。
− スクロール・アクションの時間依存特性は、クリック・アクションの特性と大きく異なる。
これらの事実は、センサ信号を解釈するソフトウェアに組み込むことができる。このソフトウェアは、入力デバイス及び/又は入力デバイスが埋め込まれた装置の一部を構成する。第一の事実は、故意のスクロール・アクションと故意のクリック・アクションの間のクロストークは不可能であることを意味する。第二の事実を図12及び13に示す。
− ユーザは特定の時間期間中に複数回スクロール方向を変更しない。
− スクロール方向が変更されるとき、速さは低い。数学的に言えば、無限短時間間隔について速さは0である。実際に分析される時間間隔前後の他の時間間隔におけるユーザ入力に関する情報を用いて、上記実際の時間間隔中に得られたセンサ信号を解釈して該実際の時間間隔におけるスクロール移動方向に関する信頼性の高い情報を得ることができる。
− 測定された時間間隔中にクリック・アクションが実行された、又は
− この時間間隔中のスクロール移動方向
を提供する。
Claims (11)
- 所定の時間間隔毎にセンサ信号を供給し、各々がスクロール・アクションとクリック・アクションとを測定するのに用いられる少なくとも1つのセンサ・ユニットと、複数の前記所定の時間間隔にわたって前記センサ・ユニットのそれぞれが供給する前記センサ信号のパターンを分析する分析手段とを有するユーザ入力デバイスを用いて、少なくとも1つのスクロール・アクション又はクリック・アクションを含む、ユーザ入力デバイスに対する物体の相対的な移動を測定する方法であって、
前記クリック・アクションは、動きのない期間が前後に存在し、パルスのようなセンサ信号を生成し、
前記スクロール・アクションは、前記クリック・アクションが生成する振動数よりも多くの振動数を有するセンサ信号を生成し、
スクロール・アクション情報及びクリック・アクション情報が前記少なくとも1つのセンサ・ユニットの何れか一つによって供給される前記センサ信号のパターンから導かれ、
前記パターンの分析には、該パターンが第一の典型的なクリック・アクションの時間パターンを示しているか、或いは、該第一の時間パターンとは異なる第二の典型的なスクロール・アクションの時間パターンを示しているかの判断が含まれ、
前記センサ信号は、作動中のレーザのレーザ空洞における変化を測定することによって得られ、該変化は、前記センサ・ユニットのそれぞれが物体表面を測定レーザ光線で照射し、該物体表面によって反射された、該測定レーザ光線に沿う測定ビーム放射線が、該測定レーザ光線を発する該レーザ空洞に再突入するという事実によってもたらされ、該レーザ空洞に再突入する該測定ビーム放射線と該レーザ空洞における光波との干渉を原因とする、
ことを特徴とする方法。 - 請求項1記載の方法であって、
所定の時間間隔中に得られた少なくとも1つのセンサ信号の分析には、該所定の時間間隔中に得られた少なくとも1つのセンサ信号と組み合わせられる、過去及び未来の他の時間間隔中に得られたセンサ信号が用いられ、
前記分析は、スクロール・アクションとクリック・アクションとを区別するために、或いは、スクロール・アクションの方向を決定するために行われ、また、前記分析は、前記所定の時間間隔中に得られた少なくとも1つのセンサ信号と前記過去及び未来の他の時間間隔中に得られたセンサ信号とのそれぞれから導かれる前記相対的な移動の速さ及び方向の複数の組み合わせに基づいて行われる、
ことを特徴とする方法。 - 請求項1又は2記載の方法であって、
前記少なくとも1つのセンサは、起動パルスによって起動され、
センサ信号分析は、前記起動パルスにより決定された測定時間間隔中に実行される、ことを特徴とする方法。 - 請求項1乃至3のいずれか一項記載の方法であって、
測定時間間隔の前半及び後半それぞれにおけるセンサ信号の第一及び第二の振動数が求められ、
前記測定時間間隔を一周期として用いる周期的に変化する駆動電流が、前記レーザに適用され、
前記第一及び第二の振動数の合計が前記測定時間間隔中のクリック・アクション動きを検出するのに用いられる、ことを特徴とする方法。 - 請求項1乃至4のいずれか一項記載の方法であって、
測定時間間隔の前半及び後半それぞれにおけるセンサ信号の第一及び第二の振動数が求められ、
前記測定時間間隔を一周期として用いる周期的に変化する駆動電流が、前記レーザに適用され、
前記第一及び第二の振動数の差がスクロール移動の方向を求めるのに用いられ、該移動の速さが前記第一及び第二の振動数の合計から求められる、ことを特徴とする方法。 - 請求項1乃至5のいずれか一項記載の方法であって、
スクロール・アクション及びクリック・アクションを測定する少なくとも1つの光学式センサを有する光学式入力デバイスが用いられる、ことを特徴とする方法。 - 各センサ・ユニットによって実行される測定が物体表面を測定レーザ光線で照射する工程と該表面によって反射された測定ビーム放射線の選択された一部分を電気信号に変換する工程とを有する請求項6記載の方法であって、
前記測定ビームに沿って反射され、該測定ビームを発するレーザ空洞に再突入する測定ビーム放射線が選択され、
再突入した放射線と前記レーザ空洞における光波との干渉を原因とし、相対的な物体移動を表す、該レーザ空洞の作動中の変化が測定される、ことを特徴とする方法。 - 所定の時間間隔毎にセンサ信号を供給し、各々がスクロール・アクションとクリック・アクションとを測定するのに用いられる少なくとも1つのセンサ・ユニットと、複数の前記所定の時間間隔にわたって前記センサ・ユニットのそれぞれが供給する前記センサ信号のパターンを分析する分析手段とを有するユーザ入力デバイスであり、少なくとも1つのスクロール・アクション又はクリック・アクションを含む、ユーザ入力デバイスに対する物体の相対的な移動を測定する入力デバイスであって、
前記クリック・アクションは、動きのない期間が前後に存在し、パルスのようなセンサ信号を生成し、
前記スクロール・アクションは、前記クリック・アクションが生成する振動数よりも多くの振動数を有するセンサ信号を生成し、
スクロール・アクション情報及びクリック・アクション情報が前記少なくとも1つのセンサ・ユニットの何れか一つによって供給される前記センサ信号のパターンから導かれ、
前記分析手段が、前記クリック・アクションの第一の典型的なセンサ信号時間パターンを前記スクロール・アクションの第二の典型的なセンサ信号時間パターンと区別する手段を有し、
前記センサ信号は、作動中のレーザのレーザ空洞における変化を測定することによって得られ、該変化は、前記センサ・ユニットのそれぞれが物体表面を測定レーザ光線で照射し、該物体表面によって反射された、該測定レーザ光線に沿う測定ビーム放射線が、該測定レーザ光線を発する該レーザ空洞に再突入するという事実によってもたらされ、該レーザ空洞に再突入する該測定ビーム放射線と該レーザ空洞における光波との干渉を原因とする、
ことを特徴とする入力デバイス。 - 請求項8記載の入力デバイスであって、
前記入力デバイスは、少なくとも1つの光学式センサ・ユニットを有する光学式デバイスであり、
前記少なくとも1つの光学式センサ・ユニットは、
レーザ空洞を備え、測定ビームを生成するダイオード・レーザと、
物体近くの一平面内に前記測定ビームを集中させる光学手段と、
前記物体によって反射された測定ビーム放射線を電気センサ信号へ変換する変換手段とを含む、ことを特徴とする入力デバイス。 - 請求項9記載の入力デバイスであって、
前記入力デバイスの透明窓の近くに配置され、前記測定ビームの一部を参照ビームとして分離する部分伝達構成要素と、
前記参照ビーム及び前記物体によって反射された測定ビーム放射線を受信する小さい開口部を備えた放射線感応検出手段と、を更に有することを特徴とする入力デバイス。 - 請求項9記載の入力デバイスであって、
前記変換手段は、
前記レーザ空洞と
前記レーザ空洞に再突入した反射測定ビーム放射線とこの空洞における光波との干渉を原因とし、前記物体と前記入力デバイスとの相対的な移動を表す前記レーザ空洞の変化を作動中に測定する測定手段との組み合わせによって構成される、ことを特徴とする入力デバイス。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP02077217.4 | 2002-06-04 | ||
| EP02077217 | 2002-06-04 | ||
| PCT/IB2003/002056 WO2003102717A2 (en) | 2002-06-04 | 2003-06-04 | Method of measuring the movement of an input device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005528682A JP2005528682A (ja) | 2005-09-22 |
| JP4933043B2 true JP4933043B2 (ja) | 2012-05-16 |
Family
ID=29595043
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004509537A Expired - Lifetime JP4933043B2 (ja) | 2002-06-04 | 2003-06-04 | 入力デバイスの移動を測定する方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7589709B2 (ja) |
| EP (1) | EP1514165A2 (ja) |
| JP (1) | JP4933043B2 (ja) |
| KR (1) | KR100999444B1 (ja) |
| CN (1) | CN1289997C (ja) |
| AU (1) | AU2003232381A1 (ja) |
| TW (1) | TWI313835B (ja) |
| WO (1) | WO2003102717A2 (ja) |
Families Citing this family (65)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7834855B2 (en) | 2004-08-25 | 2010-11-16 | Apple Inc. | Wide touchpad on a portable computer |
| CN1326020C (zh) | 2002-06-04 | 2007-07-11 | 皇家飞利浦电子股份有限公司 | 测量输入设备的移动的方法 |
| US7313255B2 (en) | 2003-05-19 | 2007-12-25 | Avago Technologies Ecbu Ip Pte Ltd | System and method for optically detecting a click event |
| US7859517B2 (en) * | 2003-07-31 | 2010-12-28 | Kye Systems Corporation | Computer input device for automatically scrolling |
| US8217896B2 (en) * | 2003-07-31 | 2012-07-10 | Kye Systems Corporation | Computer input device for automatically scrolling |
| US7492351B2 (en) * | 2003-12-18 | 2009-02-17 | Avago Technologies Ecbu Ip (Singapore) Pte. Ltd. | Optical navigation based on laser feedback or laser interferometry |
| EP1716476B1 (en) * | 2004-02-09 | 2015-05-20 | Koninklijke Philips N.V. | Optical input device based on doppler shift and laser self-mixing |
| US20050184953A1 (en) * | 2004-02-20 | 2005-08-25 | Camp William O.Jr. | Thumb-operable man-machine interfaces (MMI) for portable electronic devices, portable electronic devices including the same and methods of operating the same |
| US7359419B2 (en) * | 2004-06-25 | 2008-04-15 | Finisar Corporation | Vertical cavity surface emitting laser optimized for thermal sensitivity |
| US7742515B2 (en) * | 2004-06-25 | 2010-06-22 | Finisar Corporation | Vertical cavity surface emitting laser optimized for optical sensitivity |
| US7746911B2 (en) * | 2004-06-25 | 2010-06-29 | Finisar Corporation | Geometric optimizations for reducing spontaneous emissions in photodiodes |
| JP2008524690A (ja) * | 2004-12-16 | 2008-07-10 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 密閉筐体を有する相対運動センサ |
| KR100698654B1 (ko) * | 2005-01-04 | 2007-03-23 | 주식회사 팬택앤큐리텔 | 수신 다이버시티를 이용한 전원 절약 방법 및 그를 이용한이동통신 단말기 |
| US20060152482A1 (en) * | 2005-01-07 | 2006-07-13 | Chauncy Godwin | Virtual interface and control device |
| DE602006013606D1 (de) * | 2005-02-10 | 2010-05-27 | Koninkl Philips Electronics Nv | Optischer blutflussmesser unter verwendung von selbstmisch-dopplereffekt |
| KR100677457B1 (ko) * | 2005-05-24 | 2007-02-02 | 엘지전자 주식회사 | 단말기의 카메라를 이용한 메뉴 입력 장치 및 방법 |
| CN101305337B (zh) * | 2005-08-30 | 2012-09-05 | 皇家飞利浦电子股份有限公司 | 测量对象和光学输入设备的二维相对运动的方法 |
| KR101303371B1 (ko) * | 2005-08-30 | 2013-09-03 | 코닌클리즈케 필립스 일렉트로닉스 엔.브이. | 소정 범위의 속도들에 걸친 객체와 광 입력 장치의 상대이동을 측정하는 방법 |
| KR100732166B1 (ko) * | 2005-09-02 | 2007-06-27 | 엘지전자 주식회사 | 컨텐츠 검색 기능을 갖는 이동통신단말기 및 이를 이용한방법 |
| US7737959B2 (en) | 2005-09-08 | 2010-06-15 | Avago Technologies Ecbu Ip (Singapore) Pte. Ltd. | Position detection system using laser speckle |
| US8111243B2 (en) | 2006-03-30 | 2012-02-07 | Cypress Semiconductor Corporation | Apparatus and method for recognizing a tap gesture on a touch sensing device |
| US20070247431A1 (en) * | 2006-04-20 | 2007-10-25 | Peter Skillman | Keypad and sensor combination to provide detection region that overlays keys |
| US9274807B2 (en) | 2006-04-20 | 2016-03-01 | Qualcomm Incorporated | Selective hibernation of activities in an electronic device |
| US8683362B2 (en) * | 2008-05-23 | 2014-03-25 | Qualcomm Incorporated | Card metaphor for activities in a computing device |
| US8296684B2 (en) | 2008-05-23 | 2012-10-23 | Hewlett-Packard Development Company, L.P. | Navigating among activities in a computing device |
| KR100772909B1 (ko) | 2006-05-30 | 2007-11-05 | 삼성전자주식회사 | 이미지 검색 방법 및 장치 |
| TWM304078U (en) * | 2006-07-21 | 2007-01-01 | Behavior Tech Computer Corp | Cursor control mechanism |
| US7969410B2 (en) | 2006-08-23 | 2011-06-28 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Optically detecting click events |
| WO2009001283A2 (en) * | 2007-06-27 | 2008-12-31 | Koninklijke Philips Electronics N.V. | Optical sensor module and its manufacture |
| WO2009006306A1 (en) * | 2007-06-28 | 2009-01-08 | American Distributors, Inc. | Networked optoelectronic sensor for detecting and counting objects |
| US8106885B2 (en) * | 2007-12-19 | 2012-01-31 | Research In Motion Limited | Input mechanism for handheld electronic communication device |
| US20090174679A1 (en) | 2008-01-04 | 2009-07-09 | Wayne Carl Westerman | Selective Rejection of Touch Contacts in an Edge Region of a Touch Surface |
| JP5576294B2 (ja) * | 2008-01-16 | 2014-08-20 | コーニンクレッカ フィリップス エヌ ヴェ | 自己混合干渉に基づくレーザセンサシステム |
| KR20090105154A (ko) * | 2008-04-01 | 2009-10-07 | 크루셜텍 (주) | 광 포인팅 장치 및 광 포인팅 장치를 이용한 클릭 인식방법 |
| TW200943163A (en) * | 2008-04-02 | 2009-10-16 | Kye Systems Corp | Method of scrolling computer windows |
| TWI367435B (en) * | 2008-04-08 | 2012-07-01 | Pixart Imaging Inc | Optical scrolling module and optical control module |
| US8246408B2 (en) * | 2008-06-13 | 2012-08-21 | Barco, Inc. | Color calibration system for a video display |
| EP2323542A1 (en) * | 2008-07-31 | 2011-05-25 | Koninklijke Philips Electronics N.V. | Analysis by photo acoustic displacement and interferometryl |
| US8294047B2 (en) * | 2008-12-08 | 2012-10-23 | Apple Inc. | Selective input signal rejection and modification |
| JP4683135B2 (ja) * | 2009-03-04 | 2011-05-11 | エプソンイメージングデバイス株式会社 | 位置検出機能付き表示装置および電子機器 |
| EP2414917B1 (en) | 2009-03-31 | 2017-05-31 | Koninklijke Philips N.V. | Method and device for detecting motion |
| KR101714769B1 (ko) * | 2009-03-31 | 2017-03-09 | 코닌클리케 필립스 엔.브이. | 신호 복조를 위한 시스템 |
| US8711097B2 (en) | 2009-11-22 | 2014-04-29 | Digitaloptics Corporation | Optical navigation device with image sensor and inner housing |
| US8982063B2 (en) | 2010-02-25 | 2015-03-17 | Blackberry Limited | Optical naviagation module having a metallic illumination ring |
| KR101275388B1 (ko) * | 2010-04-14 | 2013-06-14 | 삼성전기주식회사 | 광포인팅 모듈 및 전자 장치 |
| DE102011015806A1 (de) | 2011-04-01 | 2012-10-04 | Ident Technology Ag | Displayeinrichtung |
| CN102236453A (zh) * | 2010-04-30 | 2011-11-09 | 禾伸堂企业股份有限公司 | 双视显示装置的操作方法 |
| US8711093B2 (en) * | 2010-06-24 | 2014-04-29 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Input device with photodetector pairs |
| US10881310B2 (en) * | 2012-08-25 | 2021-01-05 | The Board Of Trustees Of The Leland Stanford Junior University | Motion artifact mitigation methods and devices for pulse photoplethysmography |
| US8744418B2 (en) * | 2012-08-31 | 2014-06-03 | Analog Devices, Inc. | Environment detection for mobile devices |
| US9692875B2 (en) * | 2012-08-31 | 2017-06-27 | Analog Devices, Inc. | Grip detection and capacitive gesture system for mobile devices |
| JP6208517B2 (ja) * | 2013-10-02 | 2017-10-04 | 株式会社Nttドコモ | 入力装置 |
| US10139869B2 (en) | 2014-07-23 | 2018-11-27 | Analog Devices, Inc. | Capacitive sensors for grip sensing and finger tracking |
| CN104656895B (zh) * | 2015-02-10 | 2018-02-02 | 北京智谷睿拓技术服务有限公司 | 确定输入信息的方法和设备 |
| US10140499B1 (en) * | 2017-05-25 | 2018-11-27 | Synaptics Incorporated | Systems and methods for touch and press detection using a sensor |
| DE102018101846A1 (de) * | 2018-01-26 | 2019-08-01 | Sick Ag | Optoelektronischer Sensor und Verfahren zur Erfassung von Objekten |
| US11157113B2 (en) * | 2018-04-13 | 2021-10-26 | Apple Inc. | Self-mixing interference based sensors for characterizing touch input |
| US11243686B2 (en) | 2018-04-13 | 2022-02-08 | Apple Inc. | Self-mixing interference based sensors for characterizing user input |
| US11740071B2 (en) | 2018-12-21 | 2023-08-29 | Apple Inc. | Optical interferometry proximity sensor with temperature variation compensation |
| US11243068B1 (en) * | 2019-02-28 | 2022-02-08 | Apple Inc. | Configuration and operation of array of self-mixing interferometry sensors |
| US11156456B2 (en) | 2019-05-21 | 2021-10-26 | Apple Inc. | Optical proximity sensor integrated into a camera module for an electronic device |
| US11473898B2 (en) | 2019-05-24 | 2022-10-18 | Apple Inc. | Wearable voice-induced vibration or silent gesture sensor |
| US11874110B2 (en) | 2020-09-25 | 2024-01-16 | Apple Inc. | Self-mixing interferometry device configured for non-reciprocal sensing |
| US11460293B2 (en) | 2020-09-25 | 2022-10-04 | Apple Inc. | Surface quality sensing using self-mixing interferometry |
| US11629948B2 (en) | 2021-02-04 | 2023-04-18 | Apple Inc. | Optical interferometry proximity sensor with optical path extender |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3644042A (en) * | 1970-06-15 | 1972-02-22 | Hughes Aircraft Co | Laser system for monitoring the motion of objects |
| DE4446431C2 (de) * | 1994-12-23 | 1998-05-07 | Siemens Ag | Verfahren zur direkten Manipulation von Bildern auf einem Monitor mit einer Maus |
| AU6633798A (en) * | 1998-03-09 | 1999-09-27 | Gou Lite Ltd. | Optical translation measurement |
| JP2000148351A (ja) * | 1998-09-09 | 2000-05-26 | Matsushita Electric Ind Co Ltd | ユ―ザ動作の種類に応じて操作指示をする操作指示出力装置及びコンピュ―タ読み取り可能な記録媒体 |
| US20030006956A1 (en) * | 1999-05-24 | 2003-01-09 | Charles Yimin Wu | Data entry device recording input in two dimensions |
| US6587093B1 (en) | 1999-11-04 | 2003-07-01 | Synaptics Incorporated | Capacitive mouse |
| GB2357335B (en) * | 1999-12-17 | 2004-04-07 | Nokia Mobile Phones Ltd | Fingerprint recognition and pointing device |
| US6734883B1 (en) * | 2000-05-25 | 2004-05-11 | International Business Machines Corporation | Spinlist graphical user interface control with preview and postview |
| JP4087247B2 (ja) * | 2000-11-06 | 2008-05-21 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 入力デバイスの移動の測定方法 |
| CN1326020C (zh) * | 2002-06-04 | 2007-07-11 | 皇家飞利浦电子股份有限公司 | 测量输入设备的移动的方法 |
| EP1716476B1 (en) * | 2004-02-09 | 2015-05-20 | Koninklijke Philips N.V. | Optical input device based on doppler shift and laser self-mixing |
-
2003
- 2003-05-30 TW TW092114775A patent/TWI313835B/zh not_active IP Right Cessation
- 2003-06-04 EP EP03756076A patent/EP1514165A2/en not_active Ceased
- 2003-06-04 JP JP2004509537A patent/JP4933043B2/ja not_active Expired - Lifetime
- 2003-06-04 AU AU2003232381A patent/AU2003232381A1/en not_active Abandoned
- 2003-06-04 CN CNB038128934A patent/CN1289997C/zh not_active Expired - Lifetime
- 2003-06-04 WO PCT/IB2003/002056 patent/WO2003102717A2/en not_active Application Discontinuation
- 2003-06-04 US US10/516,144 patent/US7589709B2/en active Active
- 2003-06-04 KR KR1020047019754A patent/KR100999444B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| US7589709B2 (en) | 2009-09-15 |
| KR20050005536A (ko) | 2005-01-13 |
| AU2003232381A1 (en) | 2003-12-19 |
| TW200405976A (en) | 2004-04-16 |
| TWI313835B (en) | 2009-08-21 |
| JP2005528682A (ja) | 2005-09-22 |
| CN1659501A (zh) | 2005-08-24 |
| US20050243053A1 (en) | 2005-11-03 |
| EP1514165A2 (en) | 2005-03-16 |
| AU2003232381A8 (en) | 2003-12-19 |
| KR100999444B1 (ko) | 2010-12-09 |
| CN1289997C (zh) | 2006-12-13 |
| WO2003102717A3 (en) | 2004-07-22 |
| WO2003102717A2 (en) | 2003-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4933043B2 (ja) | 入力デバイスの移動を測定する方法 | |
| EP1334463B1 (en) | Method of measuring the movement of an input device. | |
| US7339683B2 (en) | Method of measuring the movement of an input device | |
| US20230288186A1 (en) | Self-Mixing Interference Based Sensors for Characterizing Touch Input | |
| KR101192909B1 (ko) | 검출 시스템 및 방법 | |
| US7573463B2 (en) | Apparatus equipped with an optical keyboard and optical input device | |
| US11243686B2 (en) | Self-mixing interference based sensors for characterizing user input | |
| EP1509834A2 (en) | Apparatus comprising an optical input device and at least one further optical device having a common radiation source | |
| US20060097138A1 (en) | Optical pointing sensor and cursor control method thereof | |
| WO2023156380A1 (en) | Self-mixing interferometry sensor module, electronic device and method of detecting movements |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060601 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080812 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081110 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090413 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20090522 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20100402 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111220 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120216 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4933043 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150224 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |