JP4913316B2 - Step calculation device - Google Patents
Step calculation device Download PDFInfo
- Publication number
- JP4913316B2 JP4913316B2 JP2003197364A JP2003197364A JP4913316B2 JP 4913316 B2 JP4913316 B2 JP 4913316B2 JP 2003197364 A JP2003197364 A JP 2003197364A JP 2003197364 A JP2003197364 A JP 2003197364A JP 4913316 B2 JP4913316 B2 JP 4913316B2
- Authority
- JP
- Japan
- Prior art keywords
- step count
- sum
- calculation
- acceleration
- steps
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images




Landscapes
- Measurement Of Distances Traversed On The Ground (AREA)
Description
【0001】
【発明の属する技術分野】
この発明は、人体等に装着して歩数を計測するようにした歩数演算装置に関し、特に、加速度センサを用いて歩数演算を行うようにした歩数演算装置に関する。
【0002】
【従来の技術】
従来から、人体等に装着されてその歩数を計測し、例えば、消費カロリーを推測する計器として、歩数計、或いは万歩計(登録商標)等が知られている。
前記歩数計は、例えば、歩行に伴って生じる物理量をセンサ等で検出し、その検出結果に基づいて、歩数を演算するようにしたものが一般的である。
【0003】
前記物理量としては、おもりの変位、或いは加速度等を検出するようにしており、前記おもりの変位、すなわち、おもりの振動回数を歩数として検出する手法等や、加速度センサの検出結果をFFT処理し、これに基づき、一定周期で行うリズム性のある反復運動が、単位時間当たりに何回行われたかを検出するようにしたもの(特許文献1)、また、互いに垂直になるように配置された3個の加速度センサ(以下、3軸の加速度センサという。)を使用し、これら加速度センサの検出結果に基づいて、歩数を演算するようにしたもの(特許文献2)等も提案されている。
【0004】
前記3軸の加速度センサの検出結果に基づき歩数を演算する方法としては、例えば、予め歩行者が走ったり足踏みしたりしたときの3軸の加速度センサの3軸の検出結果に基づいて、各軸毎の検出結果に基づいてその変動量及び振動数に基づいて、歩数を演算する方法(特許文献3)、また、3軸の検出結果をもとに、進行方向加速度及び上下方向加速度を算出し、それぞれに基づいてその変動量及び周波数に基づいて歩数を計測し、平地を走行中であるか或いは階段を昇降中であるかを判定するようにしたもの(特許文献4)等も、提案されている。
【0005】
【特許文献1】
特開平10−290854号公報
【特許文献2】
特開平9−89584号公報
【特許文献3】
特開2001−143048号公報
【特許文献4】
特開11−42220号公報
【0006】
【発明が解決しようとする課題】
前記おもりの変位量に基づいて歩数を検出するようにした方法を用いた場合、おもりを振動させるための機構が必要となるため、歩数演算装置の小型化が困難であるという問題があるが、前記加速度センサを用いた場合、比較的小型化を図ることが可能である。
しかしながら、上述のような歩数計が組み込まれた機器は、歩行者等の歩行体による携帯部位、或いは携帯方向が様々であって、なお且つ、携帯方向については歩行中一定しておらず、時々刻々と任意に変化する場合がある。
歩行に伴って生じる加速度は、一般に鉛直方向に対して変化するのみである。このため、従来の歩数計においては、1軸及び2軸しか加速度センサを持たない場合には、その軸が鉛直方向に向いていなければ、歩行に伴って生じる加速度を捕らえることができず、歩数計測を行うことができない。
【0007】
また、3軸の加速度センサを有する場合(特許文献3)であっても、鉛直方向に対する変化を正確に測定することができない場合には、この鉛直方向に対応する加速度センサの検出信号に基づいて歩数演算を行ったとしても、誤差が含まれるため、高精度に歩数測定を検出することができないという問題がある。また、3軸の加速度センサのうちの何れの検出信号を歩数演算用の検出信号として参照するかを選定する必要があり、歩数計の携帯方向の変化によっては、参照する検出信号が不定時に切り替わることになり、演算精度の点で問題が残る。
【0008】
また、各軸毎の検出結果に基づき上下方向及び前後方向の加速度を検出する方法(特許文献4)においては、3軸の加速度センサの出力に対し座標変換を行った後、再度歩数を演算する必要があり、その分演算処理の処理負荷が増加し、また、演算処理時間も長くなるという問題がある。
そこで、この発明は、上記従来の未解決の問題に着目してなされたものであり、歩数演算をより高精度に且つ容易に行うことの可能な歩数演算装置を提供することを目的としている。
【0009】
【課題を解決するための手段】
上記目的を達成するために、本発明の請求項1に係る歩数演算装置は、 検出方向が互いに垂直になるように配置された3つの加速度センサを備えた歩数演算装置において、
前記3つの加速度センサからの検出信号をそれぞれ二乗し、これらの和を二乗和として算出し続ける二乗和算出手段と、
前記二乗和算出手段で連続して算出される二乗和をしきい値に制限し且つ周波数しきい値以上の成分をカットすることで、歩数演算に有効な有効成分を抽出する有効成分抽出手段と、
前記抽出された有効成分そのままの1周期を1歩として歩数演算を行う歩数演算手段と、を備え、
前記加速度センサが携帯される歩行体の上下方向と前記各加速度センサの検出方向とが異なる場合にも、前記歩数演算を行うことができることを特徴としている。
【0010】
この請求項1に係る発明では、互いに垂直になるように配置された3つの加速度センサからの検出信号を、二乗和算出手段によってそれぞれ二乗し、これらの和を二乗和として算出し、この二乗和算出手段で算出された二乗和の変動状況に基づいて歩数演算手段で歩数演算を行う。
加速度センサの各軸方向と、歩数演算装置の前後、左右、上下方向とがずれている場合、歩数演算装置の上下方向の振動は各加速度センサの軸方向に座標変換されて、各加速度センサに上下方向の加速度成分が分散されることになるが、各加速度センサの検出信号の二乗和を算出し、各加速度センサの検出信号成分を合成した二乗和に基づいて歩数を演算するようにしているから、歩数演算の精度の向上を図ることが可能となる。
【0011】
このとき、二乗和算出手段で連続して算出される二乗和をしきい値に制限し且つ周波数しきい値以上の成分をカットすることで歩数演算手段での歩数演算に有効な有効成分が抽出され、歩数演算手段では、前記有効成分抽出手段で抽出された有効成分そのままの1周期を1歩として歩数演算を行う。つまり、歩数演算手段では、二乗和のうち歩数演算に有効な有効成分のみに基づいて歩数演算を行うから、歩数演算をより高精度に行うことが可能となる。
【0012】
また、請求項2に係る歩数演算装置は、前記歩数演算手段は、前記有効成分のピークを検出してこれをカウントするカウント手段を備え、所定時間当たりのピーク数から前記歩数を算出するようになっていることを特徴としている。
この請求項2に係る発明では、歩数演算手段では、カウント手段によって、有効成分のピークが検出されてこれがカウントされ、このカウント手段でカウントされたピーク数に基づいて、所定時間当たりのピーク数を求めることにより歩数が演算される。
【0014】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は、本発明における歩数演算装置100の概略構成を示すブロック図である。
図1中、11、12、13は、加速度センサであって、それぞれ、互いに垂直になるように配置され、直交する3軸方向(以下、X、Y、Z方向とする。)の加速度を検出するようになっている。なお、前記加速度センサ11〜13は、ピエゾ抵抗型、静電容量型等、どのような原理の加速度センサであっても適用することができる。また、前記加速度センサ11〜13の検出信号は、アナログ値であってもデジタル値であってもよく、また、後述の演算処理部20における演算処理も、アナログ処理及びデジタル処理の何れであってもよい。
【0015】
前記加速度センサ11〜13で検出される3軸方向の検出信号は、演算処理部20に入力され、ここで歩数演算が行われる。この演算処理部20は、加速度センサ11〜13からの3軸方向の加速度について、それぞれを二乗しこれらの和G2 を算出する二乗和演算部21と、この二乗和演算部21で算出された二乗和G2 から歩数有効成分を抽出する歩数有効成分抽出部22と、この歩数有効成分抽出部22で抽出された歩数有効成分に基づいて歩数をカウントする歩数カウント部23と、この歩数カウント部23でカウントした歩数を記憶するための歩数格納部24とから構成されている。
【0016】
前記二乗和演算部21は、前記加速度センサ11〜13からの検出信号を、Gx、Gy、Gzとすると、前記二乗和G2 を次式(1)にしたがって算出する。
G2 =Gx2 +Gy2 +Gz2 ……(1)
図2は、歩行体の加速度変化の典型的な測定例を示したものであって、図2(a)は進行方向に対して左右方向の加速度、図2(b)は進行方向に対して前後方向の加速度、図2(c)は進行方向に対して上下方向の加速度を表したものであって、横軸は時間、縦軸は加速度を表したものである。
【0017】
図2(a)〜(c)からわかるように、歩行体の加速度変化は、個人差或いは歩数演算装置10の携帯部位による差異等は多少あるものの、一般に、鉛直方向(上下方向)にのみ発生し、水平方向(左右及び前後方向)には、あまり発生していないことがわかる。
また、鉛直方向の加速度変化を観察すると、重力に起因する加速度測定値を中心に周期的に変動しており、すなわち、1歩を踏み出す毎に、1周期分振動していることが見て取れる。
【0018】
つまり、歩行体が携帯している加速度センサの軸方向に依存することのないパラメータとして、加速度センサの各成分の出力結果を、そのまま、歩数演算のための演算対象として用いるのではなく、前記(1)式に示すように、各加速度成分の二乗和G2 を歩数演算のための演算対象として用いている。このため、歩行体が携帯している加速度センサの方向に変化があってもその変化の状態を考慮する必要がなくなるため、その分、歩数演算のための演算処理を容易にすることができ、また、何れか1軸の加速度の検出信号ではなく、各加速度センサ11〜13の検出信号の値を反映した値に基づいて歩数演算のための演算処理が行われるから、歩数演算の演算精度が向上することになる。
【0019】
前記歩数有効成分抽出部22は、前記二乗和演算部21で算出された二乗和G2 に基づいて、歩数を測定するために有効な成分の抽出を行い、このとき、二乗和G2 の振幅軸方向の有効成分抽出法としてクリッピングを用い、また、時間軸方向の有効成分抽出法としてローパスフィルタ処理を用いて抽出を行う。具体的には、図3に示すように、クリッピング部22aにおいて、二乗和G2 に対し、あるしきい値以上(又はしきい値以下)の値を、強制的にしきい値に制限する。さらに、ローパスフィルタ部22bにおいて、ある周波数しきい値以上の成分をカットする。
【0020】
なお、前記二乗和G2 に対するクリッピングにおけるクリッピングレベル、ローパスフィルタ処理におけるカットオフ周波数或いはローパスフィルタの次数等は、歩数測定対象や歩数測定の目的等に応じて最適となるように設定すればよい。
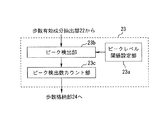
また、前記歩数カウント部23は、図4に示すように、前記歩数有効成分抽出部22で抽出した二乗和G2 の歩数有効成分に対し、ピークレベルのしきい値を設定する閾値設定部23aと、閾値設定部23aで設定したピークレベルのしきい値を超えるピークを、歩行に起因して二乗和G2 がしきい値を超えたピークであるとみなして検出するピーク検出部23bと、このピーク検出部23bで検出したしきい値を超えるピークについて、所定時間当たりのピーク数をカウントするピーク検出数カウント部23cとを備えている。
【0021】
なお、前記閾値設定部23aで設定されるピークレベルのしきい値は、歩数測定対象や歩数測定の目的等に応じて最適となるように設定すればよい。
また、前記ピーク検出部23bでは、前記二乗和G2 の歩数有効成分の上側ピーク(極大値)のみ、或いは下側ピーク(極小値)のみを検出するようにしてもよく、また、双方を検出するようにしてもよい。なお、双方を検出するようにした場合には、ピーク検出数の二分の一を歩数とするようにすればよい。
【0022】
そして、このようにしてピーク検出数カウント部23cで歩数を検出したならば、これを歩数格納部24に格納する。
このように、演算処理部20では、3軸方向の加速度センサ11〜13の検出信号Gx、Gy、Gzをもとに二乗和G2 を算出し、この二乗和G2 を、歩数演算のためのパラメータとし、このパラメータに基づいて歩数を演算している。
【0023】
ここで、歩行体の鉛直方向と、歩行体に携帯された歩数演算装置の加速度センサ11〜13の軸方向とが一致している場合には、図2に示すように、加速度センサ11〜13で検出される加速度は、鉛直方向に対応する加速度センサの加速度のみが、重力に起因する加速度測定値を中心した値となり、且つ水平方向に対応する加速度センサの加速度は、略零となるが、歩行体の鉛直方向と、歩行体に携帯された歩数演算装置の加速度センサ11〜13の軸方向がずれていたり、或いは歩行中に加速度センサ11〜13の軸方向が変化した場合には、各加速度センサ11〜13で検出される加速度は、歩行体の上下方向に発生する加速度成分が、それぞれ3軸方向に座標変換されて各加速度センサ11〜13において、加速度の変動が検出されることになる。
【0024】
このため、これらの加速度センサ11〜13で検出された加速度のうちの何れかをパラメータとし、これに基づいて歩数演算を行った場合、歩行体の上下方向の加速度を3方向に分割したうちの何れか一つに基づいて歩数演算を行うことになるため、誤差を含み易くまた誤判断を行い易くなるため、歩数演算の精度が低下する。
【0025】
しかしながら、上述のように、歩数演算のパラメータとして、各加速度センサ11〜13で検出した加速度の二乗和G2 を用い、各加速度センサ11〜13で検出された加速度成分が含まれる二乗和G2 を用いて歩数演算を行うようにしたから、歩行体の上下方向と加速度センサの軸方向とがずれた場合であっても高精度に歩数演算を行うことができる。
【0026】
また、このように、各加速度センサ11〜13で検出した加速度の二乗和G2 を算出し、そのピーク値をカウントすることで歩数演算を行うようにしているから、簡易な演算処理で歩数演算を行うことができ、歩数演算に伴う処理負荷の軽減及び処理時間の短縮を図ることができる。
また、ピーク値をカウントすることで歩数演算を行うようにしているから、歩行リズムの変化、つまり、歩行に伴って生じる一歩ごとの時間変動に適応することができ、歩数の演算結果を逐次獲得することができる。このため、歩数演算装置としての利便性を向上させることができる。
【0027】
また、このとき、加速度の二乗和G2 をそのまま用いて歩数演算を行うのではなく、二乗和G2 から歩数演算に適した有効成分を抽出し、抽出した有効成分に基づいて歩数検出を行うようにしているから、歩行体の個体差もしくは歩行体が携帯する3軸の加速度センサの携帯部位の変化に関わらず、精度よく歩数を演算することが可能である。
なお、上記実施の形態においては、前記歩数カウント部23では、図4に示すように、ピーク値をカウントするピーク検出法を用いて歩数演算を行うようにした場合について説明したが、これに限るものではなく、他の検出法を用いて歩数演算を行うようにしてもよい。
【0028】
例えば、ピーク検出法に替えて、フーリエ変換法を用いてパワースペクトルの最大値を検出する方法を適用することもできる。この場合には、図5に示すように、前記歩数カウント部23を、所定時間当たりの前記歩数有効成分抽出部22からの二乗和G2 の歩数有効成分に対し、所定タイミングでフーリエ変換を行ってパワースペクトル演算を行うスペクトル演算部23αと、スペクトル演算部23αで算出されるパワースペクトルから、パワースペクトルの最大値を検出し、検出した最大値に対応する周波数に基づいて歩数演算する最大スペクトル検出部23βと、から構成する。そして、この最大スペクトル検出部23βにおいて、パワースペクトルが最大となるときの周波数に基づいて、例えば、所定時間当たりのパルス数を算出し、これを歩数とするようにすればよい。
【0029】
なお、前記パワースペクトル演算を行うための所定時間は、歩数測定対象や歩数測定の目的等に応じて最適となるように設定すればよい。
このようにすることによって、この場合も、上記実施の形態に示すピーク検出法を用いた場合と同等の作用効果を得ることができる。
また、上記実施の形態においては、二乗和演算部21で算出した二乗和G2 を歩数演算のパラメータとし、この二乗和G2 の変化状況に基づいて歩数を検出するようにした場合について説明したが、これに限るものではなく、この二乗和G2 の平方根(G2 )1/2 を算出し、これを歩数演算のパラメータとして算出するようにしてもよい。
【0030】
また、上記実施の形態においては、二乗和演算部21で算出した二乗和G2 から歩数有効成分を抽出し、これに基づき歩数を検出するようにした場合について説明したが、必ずしも歩数有効成分の抽出を行う必要はなく、要求される歩数演算の精度、処理量等によって、任意に変更するようにしてもよい。例えば、極めて少ない演算処理量が求められる場合には、二乗和G2 或いは、その平方根(G2 )1/2 をそのまま比較器(コンパレータ)に通すことで歩数をカウントするようにしてもよい。
【0031】
また、上記実施の形態においては、歩数演算を行う歩数演算装置100に適用した場合について説明したが、上述のようにして演算した歩数に基づいて所定の処理を行うようにした装置であっても適用することができる。
例えば、歩数に基づいて歩行距離を検出するようにした装置に適用することも可能である。この場合には、図6に示すように、図1に示す演算処理部20において、さらに、歩幅の測定又は歩幅の設定を行う歩幅測定/歩幅設定部26と、この歩幅測定/歩幅設定部26で測定又は設定された歩幅と、歩数格納部24に格納された歩数とを乗算する乗算器27と、この乗算器27での乗算結果を、歩行距離として記憶する歩行距離格納部28とを設けるようにすればよい。
【0032】
ここで、上記実施の形態において、二乗和演算部21が二乗和算出手段に対応し、歩数有効成分抽出部22及び歩数カウント部23が歩数演算手段に対応し、歩数有効成分抽出部22が有効成分抽出手段に対応し、歩数カウント部23がカウント手段に対応し、スペクトル演算部23α及び最大スペクトル検出部23βがパワースペクトル最大値検出手段に対応している。
【0033】
【発明の効果】
本発明の請求項1に係る歩数演算装置によれば、各加速度センサの検出信号の二乗和を算出しこれらの和を求めた二乗和に基づいて歩数演算を行うようにしたから、歩数演算装置を携帯する歩行体の上下方向と各加速度センサの軸方向とが異なる場合であっても高精度に歩数演算を行うことができる。
【0034】
このとき、二乗和から、従来の歩数演算に有効な成分を抽出し、この抽出した有効成分に基づいて歩数演算を行うようにしたから、歩数演算の算出精度をより向上させることができる。
また、請求項2に係る歩数演算装置によれば、二乗和の有効成分のピークを検出してこれをカウント手段でカウントし、所定時間当たりのピーク数を求めることによって歩数を演算するようにしたから容易且つ的確に算出することができる。
【図面の簡単な説明】
【図1】本発明における歩数演算装置の一例を示すブロック図である。
【図2】歩行方向に対し、左右方向、前後方向、上下方向の加速度の測定結果の一例である。
【図3】図1の歩数有効成分抽出部22の一例を示すブロック図である。
【図4】図1の歩数カウント部23の一例を示すブロック図である。
【図5】歩数カウント部23のその他の例を示すブロック図である。
【図6】歩数演算装置のその他の例を示すブロック図である。
【符号の説明】
11〜13 加速度センサ
20 演算処理部
21 二乗和演算部
22 歩数有効成分抽出部
23 歩数カウント部
24 歩数格納部
26 歩幅測定/歩幅設定部
27 乗算器
28 歩行距離格納部[0001]
BACKGROUND OF THE INVENTION
The present invention relates to a step count calculation device that is mounted on a human body or the like and measures the number of steps, and more particularly to a step count calculation device that performs step count calculation using an acceleration sensor.
[0002]
[Prior art]
2. Description of the Related Art Conventionally, a pedometer, a pedometer (registered trademark), or the like is known as a meter that is attached to a human body or the like and measures the number of steps, for example, to estimate calories consumed.
In general, the pedometer is, for example, a sensor that detects a physical quantity caused by walking and calculates the number of steps based on the detection result.
[0003]
As the physical quantity, the displacement of the weight, the acceleration, or the like is detected, and the displacement of the weight, that is, the method of detecting the number of vibrations of the weight as the number of steps, the detection result of the acceleration sensor is FFT processed, Based on this, it is detected how many times a rhythmic repetitive motion performed at a constant period is performed per unit time (Patent Document 1), and 3 arranged so as to be perpendicular to each other. There has also been proposed a method (Patent Document 2) that uses a single acceleration sensor (hereinafter referred to as a triaxial acceleration sensor) and calculates the number of steps based on the detection results of these acceleration sensors.
[0004]
As a method of calculating the number of steps based on the detection result of the three-axis acceleration sensor, for example, based on the detection result of the three axes of the three-axis acceleration sensor when a pedestrian runs or steps in advance, each axis A method of calculating the number of steps based on the amount of fluctuation and the frequency based on the detection result (Patent Document 3), and the traveling direction acceleration and the vertical direction acceleration are calculated based on the detection results of the three axes. Also proposed is a method in which the number of steps is measured based on the amount of variation and the frequency based on each of them, and it is determined whether the vehicle is traveling on flat ground or the stairs are being lifted (Patent Document 4). ing.
[0005]
[Patent Document 1]
JP-A-10-290854 [Patent Document 2]
JP-A-9-89584 [Patent Document 3]
JP 2001-143048 A [Patent Document 4]
Japanese Patent Laid-Open No. 11-42220
[Problems to be solved by the invention]
When using a method that detects the number of steps based on the amount of displacement of the weight, a mechanism for vibrating the weight is required, which makes it difficult to reduce the size of the step number calculation device. When the acceleration sensor is used, a relatively small size can be achieved.
However, a device incorporating a pedometer as described above has various portable parts or portable directions by a walking body such as a pedestrian, and the portable direction is not constant during walking. It may change arbitrarily every moment.
The acceleration that occurs with walking generally only changes in the vertical direction. For this reason, in the conventional pedometer, when there are only one and two axes of acceleration sensors, if the axes are not oriented in the vertical direction, the acceleration caused by walking cannot be captured, and the number of steps Measurement cannot be performed.
[0007]
In addition, even when a three-axis acceleration sensor is provided (Patent Document 3), if a change in the vertical direction cannot be measured accurately, based on the detection signal of the acceleration sensor corresponding to the vertical direction. Even if the step count calculation is performed, there is a problem that the step count measurement cannot be detected with high accuracy because the error is included. In addition, it is necessary to select which detection signal of the three-axis acceleration sensor is to be referred to as a detection signal for calculating the number of steps, and the detection signal to be referred to is switched indefinitely depending on the change in the carrying direction of the pedometer. As a result, problems remain in terms of calculation accuracy.
[0008]
In the method of detecting vertical and longitudinal accelerations based on the detection results for each axis (Patent Document 4), after converting the coordinates of the output of the triaxial acceleration sensor, the number of steps is calculated again. Therefore, there is a problem that the processing load of the arithmetic processing increases and the arithmetic processing time becomes longer.
Accordingly, the present invention has been made paying attention to the above-mentioned conventional unsolved problems, and an object thereof is to provide a step number calculation device capable of performing step number calculation with higher accuracy and ease.
[0009]
[Means for Solving the Problems]
In order to achieve the above object, a step count calculation apparatus according to
A sum of squares calculation means that squares detection signals from the three acceleration sensors, and continues to calculate the sum of these as a sum of squares;
By cutting the limit to and frequency threshold value or more ingredients square sum that will be calculated continuously the threshold by the square sum calculating means, the active ingredient extracting means for extracting an effective active ingredient in step arithmetic operation ,
And a step arithmetic operation means for performing a number of steps calculates the active ingredient as one cycle, which is the extracted as one step,
The step count calculation can be performed even when the vertical direction of the walking object carrying the acceleration sensor is different from the detection direction of each acceleration sensor.
[0010]
In the invention according to
If the direction of each axis of the acceleration sensor deviates from the front, back, left, and right and up and down directions of the step count calculation device, the vertical vibration of the step calculation device is coordinate-converted to the axis direction of each acceleration sensor, Although acceleration components in the vertical direction are dispersed, the sum of squares of detection signals of the respective acceleration sensors is calculated, and the number of steps is calculated based on the sum of squares obtained by combining the detection signal components of the respective acceleration sensors. Therefore, it is possible to improve the accuracy of the step count calculation.
[0011]
In this case, the active component effective step arithmetic operation in step arithmetic operation means by cutting the square sum of the square sum that will be calculated by continuously calculating means limited to the threshold and the frequency threshold or more components extracted is, in step arithmetic operation means performs step arithmetic operation one cycle of intact active ingredients extracted by the effective component extracting means as one step. That is, since the step count calculation means performs the step count calculation based only on the effective component effective for the step count calculation in the sum of squares, the step count calculation can be performed with higher accuracy.
[0012]
Further, in the step calculation device according to
In the invention according to
[0014]
DETAILED DESCRIPTION OF THE INVENTION
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
FIG. 1 is a block diagram showing a schematic configuration of a step
In FIG. 1,
[0015]
The detection signals in the triaxial directions detected by the
[0016]
When the detection signals from the
G 2 = Gx 2 + Gy 2 + Gz 2 (1)
FIG. 2 shows a typical measurement example of the acceleration change of the walking body. FIG. 2 (a) shows the acceleration in the lateral direction with respect to the traveling direction, and FIG. FIG. 2C shows the acceleration in the front-rear direction, and FIG. 2C shows the acceleration in the vertical direction with respect to the traveling direction, where the horizontal axis represents time and the vertical axis represents acceleration.
[0017]
As can be seen from FIGS. 2 (a) to 2 (c), the acceleration change of the walking body generally occurs only in the vertical direction (up and down direction) although there are individual differences or differences depending on the portable part of the step count calculation device 10. In addition, it can be seen that there is not much occurrence in the horizontal direction (left and right and front and rear directions).
Further, when the acceleration change in the vertical direction is observed, it can be seen that it periodically fluctuates around the acceleration measurement value caused by gravity, that is, every time one step is taken, it vibrates for one cycle.
[0018]
That is, as a parameter that does not depend on the axial direction of the acceleration sensor carried by the walking body, the output result of each component of the acceleration sensor is not used as a calculation target for the step count calculation as it is. As shown in equation (1), the sum of squares G 2 of each acceleration component is used as a calculation target for calculating the number of steps. For this reason, even if there is a change in the direction of the acceleration sensor carried by the walking body, it is not necessary to consider the state of the change, and accordingly, the calculation process for calculating the number of steps can be facilitated. In addition, since the calculation processing for the step count calculation is performed based on the value reflecting the value of the detection signal of each
[0019]
The step count effective
[0020]
Incidentally, the clipping level in the clipping for the square sum G 2, orders and the like of the cut-off frequency or the low-pass filter in the low-pass filter processing may be set to be optimum in accordance with the purpose or the like of the number of steps measured and pedometer.
Further, as shown in FIG. 4, the step
[0021]
Note that the threshold of the peak level set by the
Further, in the
[0022]
Then, if the number of steps is detected by the peak detection
As described above, the
[0023]
Here, when the vertical direction of the walking body and the axial direction of the
[0024]
For this reason, when any of the accelerations detected by these
[0025]
However, as described above, as a parameter of step arithmetic operation, using the square sum G 2 of the acceleration detected by the
[0026]
In addition, the step count calculation is performed by calculating the square sum G 2 of the accelerations detected by the
In addition, because the step count is calculated by counting the peak value, it can be applied to changes in the walking rhythm, that is, the time fluctuation for each step caused by walking, and the step count calculation results are obtained sequentially. can do. For this reason, the convenience as a step count calculation apparatus can be improved.
[0027]
At this time, the step count calculation is not performed using the square sum of acceleration G 2 as it is, but the effective component suitable for the step count calculation is extracted from the square sum G 2 and the step count is detected based on the extracted effective component. Therefore, it is possible to calculate the number of steps with high accuracy regardless of the individual difference of the walking body or the change of the portable part of the three-axis acceleration sensor carried by the walking body.
In the above embodiment, the step
[0028]
For example, instead of the peak detection method, a method of detecting the maximum value of the power spectrum using a Fourier transform method can be applied. In this case, as shown in FIG. 5, the
[0029]
In addition, what is necessary is just to set the predetermined time for performing the said power spectrum calculation so that it may become optimal according to the step measurement object, the purpose of step measurement, etc.
By doing in this way, also in this case, it is possible to obtain the same operational effect as when the peak detection method shown in the above embodiment is used.
In the above embodiment, the case where the sum of squares G 2 calculated by the sum of
[0030]
Further, in the above embodiment, the case has been described in which the step count effective component is extracted from the square sum G 2 calculated by the square
[0031]
In the above-described embodiment, the case where the present invention is applied to the step
For example, the present invention can be applied to an apparatus that detects a walking distance based on the number of steps. In this case, as shown in FIG. 6, the
[0032]
Here, in the above embodiment, the sum of
[0033]
【Effect of the invention】
According to the step count calculation apparatus according to
[0034]
At this time, since a component effective for the conventional step count calculation is extracted from the sum of squares, and the step count calculation is performed based on the extracted effective component, the calculation accuracy of the step count calculation can be further improved.
Further, according to the step count calculating apparatus according to
[Brief description of the drawings]
FIG. 1 is a block diagram illustrating an example of a step count calculation apparatus according to the present invention.
FIG. 2 is an example of measurement results of acceleration in the left-right direction, the front-rear direction, and the up-down direction with respect to the walking direction.
FIG. 3 is a block diagram illustrating an example of a step count effective
4 is a block diagram illustrating an example of a step
5 is a block diagram showing another example of the step
FIG. 6 is a block diagram showing another example of the step count calculation device.
[Explanation of symbols]
11-13
Claims (2)
前記3つの加速度センサからの検出信号をそれぞれ二乗し、これらの和を二乗和として算出し続ける二乗和算出手段と、
前記二乗和算出手段で連続して算出される二乗和をしきい値に制限し且つ周波数しきい値以上の成分をカットすることで、歩数演算に有効な有効成分を抽出する有効成分抽出手段と、
前記抽出された有効成分そのままの1周期を1歩として歩数演算を行う歩数演算手段と、を備え、
前記加速度センサが携帯される歩行体の上下方向と前記各加速度センサの検出方向とが異なる場合にも、前記歩数演算を行うことができることを特徴とする歩数演算装置。In the step number calculation device including three acceleration sensors arranged so that the detection directions are perpendicular to each other,
A sum of squares calculation means that squares detection signals from the three acceleration sensors, and continues to calculate the sum of these as a sum of squares;
By cutting the limit to and frequency threshold value or more ingredients square sum that will be calculated continuously the threshold by the square sum calculating means, the active ingredient extracting means for extracting an effective active ingredient in step arithmetic operation ,
And a step arithmetic operation means for performing a number of steps calculates the active ingredient as one cycle, which is the extracted as one step,
The step number calculating device characterized in that the step number calculation can be performed even when the vertical direction of a walking body in which the acceleration sensor is carried differs from the detection direction of each acceleration sensor.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003197364A JP4913316B2 (en) | 2003-07-15 | 2003-07-15 | Step calculation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003197364A JP4913316B2 (en) | 2003-07-15 | 2003-07-15 | Step calculation device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005038018A JP2005038018A (en) | 2005-02-10 |
| JP4913316B2 true JP4913316B2 (en) | 2012-04-11 |
Family
ID=34207540
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003197364A Expired - Lifetime JP4913316B2 (en) | 2003-07-15 | 2003-07-15 | Step calculation device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4913316B2 (en) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4706310B2 (en) * | 2005-04-13 | 2011-06-22 | パナソニック電工株式会社 | Pedometer |
| JP4877909B2 (en) * | 2005-09-15 | 2012-02-15 | シャープ株式会社 | Motion measuring device |
| JP5120795B2 (en) * | 2005-11-15 | 2013-01-16 | 学校法人日本大学 | Human posture motion discrimination device and energy consumption calculation device |
| JP4622827B2 (en) * | 2005-11-25 | 2011-02-02 | パナソニック電工株式会社 | Pedometer |
| JP2007236917A (en) * | 2006-02-08 | 2007-09-20 | Seiko Instruments Inc | Exercise measuring instrument |
| JP4981349B2 (en) * | 2006-04-25 | 2012-07-18 | パナソニック株式会社 | Pedometer |
| JP4899725B2 (en) * | 2006-08-29 | 2012-03-21 | アイシン精機株式会社 | Step counting device |
| JP4957258B2 (en) * | 2007-01-15 | 2012-06-20 | 富士通株式会社 | Step counting device and step counting method |
| JP5032875B2 (en) * | 2007-03-30 | 2012-09-26 | パナソニック株式会社 | Pedometer |
| JP5032874B2 (en) * | 2007-03-30 | 2012-09-26 | パナソニック株式会社 | Pedometer |
| JP2008262522A (en) * | 2007-04-11 | 2008-10-30 | Aichi Micro Intelligent Corp | Pedometer |
| US8131500B2 (en) | 2007-04-13 | 2012-03-06 | Seiko Instruments Inc. | Pedometer |
| JP5144128B2 (en) * | 2007-05-24 | 2013-02-13 | セイコーインスツル株式会社 | Speedometer |
| JP4954792B2 (en) * | 2007-05-24 | 2012-06-20 | セイコーインスツル株式会社 | Speedometer |
| JP5233000B2 (en) * | 2007-11-21 | 2013-07-10 | 株式会社国際電気通信基礎技術研究所 | Motion measuring device |
| WO2009122788A1 (en) * | 2008-03-31 | 2009-10-08 | シャープ株式会社 | Body motion measuring device, mobile telephone, method for controlling the body motion measuring device, body motion measuring device control program, and computer-readable recording medium having the program recorded therein |
| JP4956811B2 (en) * | 2008-04-28 | 2012-06-20 | アイチ・マイクロ・インテリジェント株式会社 | Pedometer |
| JP5757742B2 (en) * | 2010-03-25 | 2015-07-29 | セイコーインスツル株式会社 | Electronic devices, pedometers, and programs |
| JP5617299B2 (en) * | 2010-03-25 | 2014-11-05 | オムロンヘルスケア株式会社 | Activity meter, control program, and activity type identification method |
| JP5984589B2 (en) | 2012-09-03 | 2016-09-06 | セイコーインスツル株式会社 | Electronic equipment and programs |
| US10197416B2 (en) * | 2015-01-21 | 2019-02-05 | Quicklogic Corporation | Multiple axis wrist worn pedometer |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3570163B2 (en) * | 1996-07-03 | 2004-09-29 | 株式会社日立製作所 | Method and apparatus and system for recognizing actions and actions |
| JP3314917B2 (en) * | 1997-04-17 | 2002-08-19 | 株式会社カージオペーシングリサーチ・ラボラトリー | Body motion detection method and device |
| JP3571272B2 (en) * | 2000-03-14 | 2004-09-29 | エスペック株式会社 | Exercise calorie measurement method and apparatus |
| JP3936833B2 (en) * | 2000-08-28 | 2007-06-27 | 株式会社日立製作所 | Body motion sensing device and body motion sensing system |
| JP3747153B2 (en) * | 2000-11-28 | 2006-02-22 | 日本航空電子工業株式会社 | Square circuit and signal processing circuit using square circuit |
| JP2002197437A (en) * | 2000-12-27 | 2002-07-12 | Sony Corp | Walking detection system, walking detector, device and walking detecting method |
-
2003
- 2003-07-15 JP JP2003197364A patent/JP4913316B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005038018A (en) | 2005-02-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4913316B2 (en) | Step calculation device | |
| CN102469955B (en) | Method and device for determining fall risk of user | |
| JP2006118909A (en) | Walking meter | |
| JP6080078B2 (en) | Posture and walking state estimation device | |
| JP5417970B2 (en) | Pedometer and step counting method | |
| US10130843B2 (en) | Electronic device, control program, control method, and system | |
| US20110208472A1 (en) | Movement detection device, electronic device, movement detection method and computer readable medium | |
| JP2012503194A (en) | How to process measurements from accelerometers | |
| JP6024134B2 (en) | Status detection device, electronic device, measurement system, and program | |
| JP2008262522A (en) | Pedometer | |
| US10633055B2 (en) | Method and a system for estimation of a useful effort provided by an individual during a physical activity consisting in executing an alternating pedalling movement on a pedal device | |
| JP5462587B2 (en) | Step detection device, program and method using acceleration sensor | |
| CN104586399A (en) | Training supporting apparatus and system for supporting training of walking and/or running | |
| CN110537112A (en) | Sense shake sensor and earthquake determination method | |
| JP4899725B2 (en) | Step counting device | |
| CN100425200C (en) | Body motion detection device | |
| US20150241243A1 (en) | Method for counting steps and electronic apparatus using the same | |
| CN107949796A (en) | Seismological sensor and earthquake detection method | |
| JP4405200B2 (en) | Walking time calculation device and walking distance calculation device using the same | |
| JP5071822B2 (en) | Physical state detection device, detection method thereof, and detection program | |
| JP2008173249A (en) | Activity monitor | |
| CN109632217B (en) | Continuous detection method for bearing capacity of pavement structure | |
| JP2003038469A (en) | Motion function measuring device and motion function measuring system | |
| CN107976559A (en) | Acceleration of gravity method is filtered out based on rest point detection | |
| JP4758605B2 (en) | Step calculation device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110331 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120117 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120119 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4913316 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150127 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |