JP5071822B2 - Physical state detection device, detection method thereof, and detection program - Google Patents
Physical state detection device, detection method thereof, and detection program Download PDFInfo
- Publication number
- JP5071822B2 JP5071822B2 JP2010113174A JP2010113174A JP5071822B2 JP 5071822 B2 JP5071822 B2 JP 5071822B2 JP 2010113174 A JP2010113174 A JP 2010113174A JP 2010113174 A JP2010113174 A JP 2010113174A JP 5071822 B2 JP5071822 B2 JP 5071822B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration vector
- principal component
- vector data
- acceleration
- function
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Description
本発明は、3軸加速度センサを用いて、日常生活、作業などにおける人の歩行状態や姿勢などを検出する身体状態検出装置、その検出方法及び検出プログラムに関する。 The present invention relates to a body state detection apparatus, a detection method, and a detection program for detecting a walking state or posture of a person in daily life or work using a triaxial acceleration sensor.
従来、身体に加速度センサを装着し、身体の姿勢変化による加速度センサの出力信号の変化から重力加速度方向の変化を求め、身体姿勢の検出を行う種々の方法が提案されている。例えば、下記非特許文献1には、加速度センサと角速度センサとの組み合わせにより歩行、階段昇降などを検知する方法が提案されている。 Conventionally, various methods have been proposed in which an acceleration sensor is attached to the body, a change in the gravitational acceleration direction is obtained from a change in the output signal of the acceleration sensor due to a change in the posture of the body, and a body posture is detected. For example, the following Non-Patent Document 1 proposes a method of detecting walking, stair climbing and the like by a combination of an acceleration sensor and an angular velocity sensor.
また、下記特許文献1には、人が動作していない状態で加速度センサの出力信号の直流成分を測定することによって、予め加速度センサの傾斜角度(具体的には、加速度センサが内蔵されたペースメーカの仰角とずれ角)を求めることができる体動検出装置が開示されている。 Further, in Patent Document 1 below, by measuring the direct current component of the output signal of the acceleration sensor while a person is not operating, the inclination angle of the acceleration sensor (specifically, a pacemaker with a built-in acceleration sensor) is measured. A body motion detecting device capable of obtaining the angle of elevation and the angle of deviation is disclosed.
しかし、従来の方法では、正確な測定には、加速度センサを身体に装着する際に重力加速度方向に対して正確に取り付けることが要求されるが、これは容易ではない。 However, in the conventional method, accurate measurement requires that the acceleration sensor is accurately attached to the direction of gravitational acceleration when attached to the body, but this is not easy.
また、上記特許文献1では、初期の加速度センサの傾斜角度を求めることができるが、動作していない状態で加速度センサの出力信号の直流成分を測定するという煩雑な処理が必要である。 In Patent Document 1, the initial inclination angle of the acceleration sensor can be obtained, but a complicated process of measuring the direct current component of the output signal of the acceleration sensor in a non-operating state is necessary.
更に、加速度センサを正確に取り付けることができたとしても、取り付け後の身体状態の変化によって、加速度センサの取り付け方向が初期方向から変化してしまう可能性がある場合には、重力加速度方向を予め設定しておく方法では、身体状態を正しく検出することができなくなる問題がある。 Furthermore, even if the acceleration sensor can be correctly attached, if the attachment direction of the acceleration sensor may change from the initial direction due to a change in the body condition after attachment, the gravitational acceleration direction is set in advance. In the method of setting, there is a problem that the body state cannot be detected correctly.
本発明の目的は、上記の課題を解決すべく、加速度センサの取り付け方向に依存せず、歩行状態、姿勢の傾斜などの身体状態を精度よく検出することができる身体状態検出装置、その検出方法及び検出プログラムを提供することにある。 SUMMARY OF THE INVENTION An object of the present invention is to solve the above-mentioned problems, and does not depend on the mounting direction of the acceleration sensor, and can detect a body state such as a walking state and a posture inclination with high accuracy, and a detection method thereof. And providing a detection program.
本発明の目的は、以下の手段によって達成される。 The object of the present invention is achieved by the following means.
即ち、本発明に係る身体状態検出装置(1)は、身体に装着される3軸加速度センサと、該3軸加速度センサから出力される加速度ベクトルデータを所定のサンプリング間隔で採取するデータ採取手段と、処理手段とを備え、前記処理手段が、連続して採取された前
記加速度ベクトルデータを用い、前記身体の歩行状態を検出し、前記歩行状態である期間内の連続する加速度ベクトルデータを用いて重力加速度ベクトル及び身体軸を決定し、連続して採取された前記加速度ベクトルデータに関して、各々の加速度ベクトルの絶対値、これらの絶対値の平均値、標準偏差、及び周期性を計算し、前記標準偏差が所定範囲内にあり、且つ前記周期性が所定値より大きい場合に、前記歩行状態と判断することを特徴としている。
That is, a body state detection device (1) according to the present invention includes a triaxial acceleration sensor worn on the body, and data collection means for collecting acceleration vector data output from the triaxial acceleration sensor at a predetermined sampling interval. And a processing means, wherein the processing means detects the walking state of the body using the acceleration vector data continuously collected, and uses the continuous acceleration vector data within the period of the walking state. Determine the gravitational acceleration vector and body axis, and calculate the absolute value of each acceleration vector, the average value of these absolute values, the standard deviation, and the periodicity with respect to the acceleration vector data collected continuously. When the deviation is within a predetermined range and the periodicity is greater than a predetermined value, the walking state is determined.
また、本発明に係る身体状態検出装置(2)は、上記の身体状態検出装置(1)において、前記処理手段が、前記歩行状態と判断された期間の前記加速度ベクトルデータに対して主成分分析を行い、第1主成分、第2主成分及び第3主成分を前記身体軸とすることを特徴としている。 Further, the physical condition detection device (2) according to the present invention is the principal component analysis for the acceleration vector data in the period in which the processing means is determined to be the walking state in the physical condition detection device (1). The first principal component, the second principal component, and the third principal component are used as the body axis.
また、本発明に係る身体状態検出装置(3)は、上記の身体状態検出装置(2)において、前記処理手段が、前記主成分分析の対象とした前記加速度ベクトルデータから平均加速度ベクトルを求め、該平均加速度ベクトルに近い前記第1主成分の方向を、身体の真下方向と決定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化に応じて、身体の前進方向を決定し、前記真下方向及び前記前進方向と、右手系で直交する前記第3主成分の方向を身体の右横方向と決定することを特徴としている。 Further, in the body state detection device (3) according to the present invention, in the body state detection device (2), the processing unit obtains an average acceleration vector from the acceleration vector data as a target of the principal component analysis, The direction of the first principal component close to the average acceleration vector is determined as a direction directly below the body, and the forward direction of the body is determined according to the time change of the component of the second principal component direction of the acceleration vector data. The direction of the third principal component orthogonal to the right downward direction and the forward direction in the right-handed system is determined as the right lateral direction of the body.
また、本発明に係る身体状態検出装置(4)は、上記の身体状態検出装置(3)において、前記処理手段が、身体の前進方向の決定において、前記第2主成分の一方向を正の方向と仮定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに減少する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向を身体の前進方向と決定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに増加する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向と逆の方向を、身体の前進方向と決定することを特徴としている。 Further, the body state detection device (4) according to the present invention is the body state detection device (3), wherein the processing means is positive in one direction of the second main component in determining the body forward direction. Assuming that the time component of the second principal component direction of the acceleration vector data is similar to the whole or a part of a sawtooth wave having a slowly decreasing portion, the second principal component When one direction is determined as a forward direction of the body, and the time change of the component in the second principal component direction of the acceleration vector data is similar to all or part of a sawtooth wave having a slowly increasing portion, A direction opposite to the one direction of the second main component is determined as a body advance direction.
また、本発明に係る身体状態検出装置(5)は、上記の身体状態検出装置(3)又は(4)において、前記処理手段が、前記加速度ベクトルデータの平均加速度ベクトルを求め、該平均加速度ベクトルと、前記真下方向、前記前進方向及び前記右横方向のそれぞれと成す角度を求めて、前記加速度センサを装着した身体の傾斜角度とすることを特徴としている。 Further, in the physical condition detection device (5) according to the present invention, in the physical condition detection device (3) or (4), the processing means obtains an average acceleration vector of the acceleration vector data, and the average acceleration vector And an angle formed with each of the directly downward direction, the forward direction, and the right lateral direction is obtained as an inclination angle of the body wearing the acceleration sensor.
また、本発明に係る身体状態検出方法(1)は、身体に装着された3軸加速度センサを用いて加速度ベクトルデータを所定のサンプリング間隔で採取する第1ステップと、連続して採取された前記加速度ベクトルデータを用い、前記身体の歩行状態を検出する第2ステップと、前記歩行状態である期間内の連続する加速度ベクトルデータを用いて重力加速度ベクトル及び身体軸を決定する第3ステップとを含み、前記第2ステップが、連続して採取された前記加速度ベクトルデータに関して、各々の加速度ベクトルの絶対値、これらの絶対値の平均値、標準偏差、及び周期性を計算する第4ステップと、前記標準偏差が所定範囲内にあり、且つ前記周期性が所定値より大きい場合に、前記歩行状態と判断する第5ステップとを含むことを特徴としている。 The body condition detection method (1) according to the present invention includes a first step of collecting acceleration vector data at a predetermined sampling interval using a three-axis acceleration sensor attached to the body, A second step of detecting a walking state of the body using acceleration vector data; and a third step of determining a gravitational acceleration vector and a body axis using continuous acceleration vector data within a period of the walking state. The second step calculates the absolute value of each acceleration vector, the average value of these absolute values, the standard deviation, and the periodicity with respect to the acceleration vector data collected continuously; And a fifth step of determining the walking state when the standard deviation is within a predetermined range and the periodicity is greater than a predetermined value. It is.
また、本発明に係る身体状態検出方法(2)は、上記の身体状態検出方法(1)において、前記第5ステップが、前記歩行状態と判断された期間の前記加速度ベクトルデータに対して主成分分析を行い、第1主成分、第2主成分及び第3主成分を前記身体軸とする第6ステップを含むことを特徴としている。 Further, the body state detection method (2) according to the present invention is based on the acceleration vector data in the period in which the fifth step is determined to be the walking state in the body state detection method (1). Analysis is performed, and the method includes a sixth step in which the first principal component, the second principal component, and the third principal component are the body axes.
また、本発明に係る身体状態検出方法(3)は、上記の身体状態検出方法(2)におい
て、前記第5ステップが、前記主成分分析の対象とした前記加速度ベクトルデータから平均加速度ベクトルを求め、該平均加速度ベクトルに近い前記第1主成分の方向を、身体の真下方向と決定する第7ステップと、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化に応じて、身体の前進方向を決定する第8ステップと、前記真下方向及び前記前進方向と、右手系で直交する前記第3主成分の方向を身体の右横方向と決定する第9ステップとをさらに含むことを特徴としている。
In addition, in the body state detection method (3) according to the present invention, in the body state detection method (2), the fifth step obtains an average acceleration vector from the acceleration vector data as a target of the principal component analysis. , A seventh step of determining the direction of the first principal component close to the average acceleration vector as a direction directly below the body, and a time change of the component of the second principal component direction of the acceleration vector data, An eighth step of determining a forward direction; and a ninth step of determining a direction of the third principal component orthogonal to the right-down direction and the forward direction as a right-hand direction of the body. It is said.
また、本発明に係る身体状態検出方法(4)は、上記の身体状態検出方法(3)において、前記第8ステップが、前記第2主成分の一方向を正の方向と仮定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに減少する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向を身体の前進方向と決定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに増加する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向と逆の方向を、身体の前進方向と決定するステップであることを特徴としている。 Further, in the body state detection method (4) according to the present invention, in the body state detection method (3), the eighth step assumes that one direction of the second principal component is a positive direction, and the acceleration When the time change of the component in the second principal component direction of the vector data is similar to the whole or a part of the sawtooth wave having a gently decreasing portion, the one direction of the second principal component is set as the body advance direction. And the time change of the component in the second principal component direction of the acceleration vector data is similar to the whole or a part of a sawtooth wave having a slowly increasing portion, the one of the second principal components. It is characterized by the step of determining the direction opposite to the direction as the forward direction of the body.
また、本発明に係る身体状態検出方法(5)は、上記の身体状態検出方法(3)又は(4)において、前記第3ステップが、前記加速度ベクトルデータの平均加速度ベクトルを求める第10ステップと、該平均加速度ベクトルと、前記真下方向、前記前進方向及び前記右横方向のそれぞれと成す角度を求めて、前記加速度センサを装着した身体の傾斜角度とする第11ステップとを含むことを特徴としている。 In addition, in the body state detection method (5) according to the present invention, in the body state detection method (3) or (4), the third step includes a tenth step of obtaining an average acceleration vector of the acceleration vector data; And an eleventh step of obtaining an average acceleration vector and an angle formed by each of the right-down direction, the forward direction, and the right-side direction to obtain a tilt angle of a body wearing the acceleration sensor. Yes.
また、本発明に係る身体状態検出プログラム(1)は、身体に装着される3軸加速度センサと、データ採取手段と、処理手段とを備えた身体状態検出装置に、前記3軸加速度センサを用いて加速度ベクトルデータを所定のサンプリング間隔で採取する第1機能と、連続して採取された前記加速度ベクトルデータを用い、前記身体の歩行状態を検出する第2機能と、前記歩行状態である期間内の連続する加速度ベクトルデータを用いて重力加速度ベクトル及び身体軸を決定する第3機能とを実現させ、前記第2機能が、連続して採取された前記加速度ベクトルデータに関して、各々の加速度ベクトルの絶対値、これらの絶対値の平均値、標準偏差、及び周期性を計算する第4機能と、前記標準偏差が所定範囲内にあり、且つ前記周期性が所定値より大きい場合に、前記歩行状態と判断する第5機能とを含むことを特徴としている。 In addition, the body condition detection program (1) according to the present invention uses the three-axis acceleration sensor in a body condition detection apparatus including a three-axis acceleration sensor attached to the body, a data collection unit, and a processing unit. A first function for collecting acceleration vector data at a predetermined sampling interval, a second function for detecting the walking state of the body using the acceleration vector data continuously collected, and within a period of the walking state And a third function for determining a gravitational acceleration vector and a body axis using the continuous acceleration vector data, wherein the second function is the absolute value of each acceleration vector with respect to the continuously collected acceleration vector data. A fourth function for calculating a value, an average value of these absolute values, a standard deviation, and a periodicity, and the standard deviation is within a predetermined range, and the periodicity is a predetermined value When Ri large, is characterized in that it comprises a fifth function for determining that the walking state.
また、本発明に係る身体状態検出プログラム(2)は、上記の身体状態検出プログラム(1)において、前記第5機能が、前記歩行状態と判断された期間の前記加速度ベクトルデータに対して主成分分析を行い、第1主成分、第2主成分及び第3主成分を前記身体軸とする第6機能を含むことを特徴としている。 Further, the body condition detection program (2) according to the present invention is based on the acceleration vector data during the period in which the fifth function is determined to be the walking state in the body condition detection program (1). An analysis is performed, and a sixth function having the first principal component, the second principal component, and the third principal component as the body axis is included.
また、本発明に係る身体状態検出プログラム(3)は、上記の身体状態検出プログラム(4)において、前記第5機能が、前記主成分分析の対象とした前記加速度ベクトルデータから平均加速度ベクトルを求め、該平均加速度ベクトルに近い前記第1主成分の方向を、身体の真下方向と決定する第7機能と、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化に応じて、身体の前進方向を決定する第8機能と、前記真下方向及び前記前進方向と、右手系で直交する前記第3主成分の方向を身体の右横方向と決定する第9機能とをさらに含むことを特徴としている。 Further, in the body condition detection program (3) according to the present invention, in the body condition detection program (4), the fifth function obtains an average acceleration vector from the acceleration vector data that is the target of the principal component analysis. , According to a seventh function for determining the direction of the first principal component close to the average acceleration vector as a direction directly below the body, and a time change of the component of the second principal component direction of the acceleration vector data. And an eighth function for determining a forward direction, and a ninth function for determining the direction of the third principal component orthogonal to the right-down direction and the forward direction as a right-hand direction of the body. It is said.
また、本発明に係る身体状態検出プログラム(4)は、上記の身体状態検出プログラム(3)において、前記第8機能が、前記第2主成分の一方向を正の方向と仮定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに減少する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向を身
体の前進方向と決定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに増加する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向と逆の方向を、身体の前進方向と決定する機能であることを特徴としている。
In the body condition detection program (4) according to the present invention, in the body condition detection program (3), the eighth function assumes that one direction of the second principal component is a positive direction, and the acceleration When the time change of the component in the second principal component direction of the vector data is similar to the whole or a part of the sawtooth wave having a gently decreasing portion, the one direction of the second principal component is set as the body advance direction. And the time change of the component in the second principal component direction of the acceleration vector data is similar to the whole or a part of a sawtooth wave having a slowly increasing portion, the one of the second principal components. It is characterized by the function of determining the direction opposite to the direction as the body's forward direction.
また、本発明に係る身体状態検出プログラム(5)は、上記の身体状態検出プログラム(3)又は(4)において、前記第3機能が、前記加速度ベクトルデータの平均加速度ベクトルを求める第10機能と、該平均加速度ベクトルと、前記真下方向、前記前進方向及び前記右横方向のそれぞれと成す角度を求めて、前記加速度センサを装着した身体の傾斜角度とする第11機能とを含むことを特徴としている。 Further, the body condition detection program (5) according to the present invention is the body function detection program (3) or (4), wherein the third function is a tenth function for obtaining an average acceleration vector of the acceleration vector data. And an eleventh function for determining an angle formed between the average acceleration vector and each of the right-down direction, the forward direction, and the right-side direction to obtain a tilt angle of a body wearing the acceleration sensor. Yes.
本発明によれば、測定前に3軸加速度センサを正確に取り付けたり、装着方向をキャリブレーションするなどの事前調節をする必要がなく、また測定中に加速度センサの取り付け方向が変化した場合にも、歩行状態、姿勢の傾斜などの身体状態を精度よく検出することができる。 According to the present invention, it is not necessary to make a pre-adjustment such as accurately mounting the triaxial acceleration sensor before calibration or calibrating the mounting direction, and also when the mounting direction of the acceleration sensor changes during the measurement. It is possible to accurately detect a physical state such as a walking state and a posture inclination.
特に、歩行状態として検出された期間の加速度データから計算した平均の加速度ベクトルの方向を、身体の傾斜角度を求める基準となる重力加速度の方向とすることによって、精度よく身体の傾斜角度を算出することができる。 In particular, the direction of the average acceleration vector calculated from the acceleration data of the period detected as the walking state is used as the direction of the gravitational acceleration as a reference for obtaining the body inclination angle, thereby accurately calculating the body inclination angle. be able to.
また、歩行状態における加速度データに対する主成分分析を行い、第1主成分と平均加速度ベクトルとの関係、及び第2主成分方向の加速度成分の時間変化パターンを考慮することによって、身体軸の正方向を精度よく決定することができる。この身体軸を用いることによって、精度よく身体の傾斜角度を算出して姿勢を決定することができる。 In addition, the principal component analysis is performed on the acceleration data in the walking state, and the positive direction of the body axis is considered by considering the relationship between the first principal component and the average acceleration vector and the temporal change pattern of the acceleration component in the second principal component direction. Can be determined with high accuracy. By using this body axis, the posture can be determined by accurately calculating the tilt angle of the body.
以下、本発明に係る実施の形態を、添付した図面に基づいて説明する。 DESCRIPTION OF EXEMPLARY EMBODIMENTS Hereinafter, embodiments of the invention will be described with reference to the accompanying drawings.
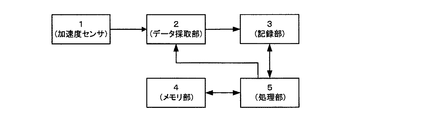
図1は、本発明の実施の形態に係る身体状態検出装置の概略構成を示すブロック図である。本実施の形態に係る身体状態検出装置は、人体に装着される3軸加速度センサ(以下、加速度センサと記す)1と、加速度センサ1のアナログ出力信号を所定の時間間隔でサンプリングし、A/D変換してディジタル信号として出力するデータ採取部2と、データ採取部2からのディジタル信号を記録する記録部3と、メモリ部4と、これらを制御する処理部5とを備えている。加速度センサ1は、例えば人体の腰部に取り付けられ、外力を受けた場合、予め加速度センサ1に設定された直交する3軸(X軸、Y軸、Z軸)の各方
向の加速度に応じたアナログ信号(電圧など)を、対応する3つの出力端子(図示せず)から出力する。
FIG. 1 is a block diagram showing a schematic configuration of a body state detection device according to an embodiment of the present invention. The body state detection apparatus according to the present embodiment samples a triaxial acceleration sensor (hereinafter referred to as an acceleration sensor) 1 attached to a human body and an analog output signal of the acceleration sensor 1 at a predetermined time interval. A
データ採取部2は、処理部5の制御を受けて、加速度センサ1から出力される各々のアナログ信号を所定のサンプリング間隔Δtで採取し、A/D変換してディジタルの加速度データ(gx,gy,gz)として、採取した順に出力する。以下において、特に断らない限り、加速度データとは3次元ベクトルデータ(gx,gy,gz)を意味するものとする。出力された加速度データは、時系列に記録部3に記録される。処理部5は、各部の制御に加えて、記録部3に記録された加速度データを対象とし、メモリ部4をワーク領域として使用して後述する歩行状態の検出処理などを実行する。
Under the control of the
以下、本実施の形態に係る身体状態検出装置の機能を具体的に説明する。 Hereinafter, the function of the body state detection device according to the present embodiment will be specifically described.
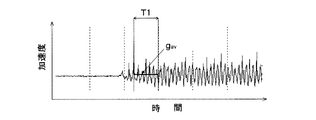
図2に、記録された加速度データの一例を示す。図2において、縦軸は加速度データの1軸方向成分、横軸は時間である。以下において、特に断らない限り処理部5が行う処理として説明する。また、各ステップでの処理において、処理部5は、適宜記録部3からメモリ部4に加速度データを読み出し、メモリ部4の所定領域をワーク領域として使用して計算を行い、その結果を適宜記録部3に記録することとする。
FIG. 2 shows an example of recorded acceleration data. In FIG. 2, the vertical axis represents the uniaxial component of acceleration data, and the horizontal axis represents time. In the following description, the processing performed by the
(高精度の身体姿勢の検出機能)
歩行状態の検出に、加速度の絶対値|g|iが加速度の平均値gAVを超える回数を用い
る方法では、歩行速度が検出精度に影響する場合がある。また、その方法では、身体の傾斜角度を、身体の前・下・横の各方向に対する傾斜角度として検出することはできず、例えば、前かがみなのか横に傾いているのかを判別することができない。これらの点を改善し、より精度良く身体姿勢を検出するために、安定的な歩行状態を検出し、この状態における身体軸を求め、この身体軸と、加速度センサによって得られる平均加速度ベクトルの成す角度を身体傾斜角として決定する。以下に、具体的に説明する。
(Highly accurate body posture detection function)
In the method of using the number of times that the absolute value of acceleration | g | i exceeds the average acceleration value g AV for detecting the walking state, the walking speed may affect the detection accuracy. In addition, the method cannot detect the inclination angle of the body as an inclination angle with respect to each of the front, lower, and side directions of the body, for example, it cannot determine whether the front is all or whether it is inclined sideways. . In order to improve these points and detect the body posture more accurately, the stable walking state is detected, the body axis in this state is obtained, and the body axis and the average acceleration vector obtained by the acceleration sensor are formed. The angle is determined as the body tilt angle. This will be specifically described below.
図3は、図1に示した身体状態検出装置による、高精度の身体姿勢の検出処理を示すフローチャートである。 FIG. 3 is a flowchart showing a highly accurate body posture detection process by the body state detection apparatus shown in FIG.
ステップS31において、初期設定を行う。評価時間幅T1、シフト時間幅ΔT1(Δ
T1≦T1)、サンプリング間隔Δtに所定の値を設定する。また、繰り返し用カウンタ
kに“0”を、全てのフラグflag(j)(jは0以上の整数値)に“0”を設定する。後述するように、時系列の全加速度データの中から、時間軸に沿ってシフト時間幅ΔT1だけシフトしながら1回の処理対象とする加速度データを決定するので、シフトする回数だけフラグflag(j)を設ける。また、傾斜角算出時間T3(<T1)及び後述す
る判断の基準値σstill、σwalk、νwalk、σw0、σw1、νw0、σshockを設定する。
In step S31, initialization is performed. Evaluation time width T 1 , shift time width ΔT 1 (Δ
T 1 ≦ T 1 ), and a predetermined value is set for the sampling interval Δt. Further, “0” is set to the repetition counter k, and “0” is set to all the flags flag (j) (j is an integer value of 0 or more). As will be described later, since the acceleration data to be processed once is determined from all the time-series acceleration data while shifting by the shift time width ΔT 1 along the time axis, the flag flag ( j) is provided. In addition, an inclination angle calculation time T 3 (<T 1 ) and reference values σ still , σ walk , ν walk , σ w0 , σ w1 , ν w0 , and σ shock to be described later are set.
ステップS32において、時系列に記録された加速度データの先頭から、評価時間幅T1の間の加速度データ(gxi,gyi,gzi)(i=k〜k+N1−1)を読み出す。評価時間幅T1毎の加速度データ数N1は、T1/Δtで計算される。 In step S32, acceleration data (g xi , g yi , g zi ) (i = k to k + N 1 −1) during the evaluation time width T 1 is read from the beginning of the acceleration data recorded in time series. Evaluation acceleration data number N 1 for every time width T 1 is calculated by T 1 / Δt.
ステップS33において、ステップS32で読み出した各々の加速度データ(gxi,gyi,gzi)(i=k〜k+N1−1)の絶対値|g|i=(gxi 2+gyi 2+gzi 2)1/2を計算し、それらの平均値gav及び標準偏差σを計算し、さらに、加速度データの絶対値|g|iの時間的変動の周期性νを計算する。周期性νを求めるのは、安定した歩行状
態を検出するためであり、この状態の特性に基づいて後述する処理が行われる。
In step S33, the absolute value | g | i = (g xi 2 + g yi 2 + g zi ) of each acceleration data (g xi , g yi , g zi ) (i = k to k + N 1 −1) read out in step S32. 2 ) Calculate 1/2 , calculate the average value g av and standard deviation σ thereof, and further calculate the periodicity ν of the temporal variation of the absolute value | g | i of the acceleration data. The reason for obtaining the periodicity ν is to detect a stable walking state, and processing described later is performed based on the characteristics of this state.
評価時間幅T1中の時間間隔Δtの時系列データである加速度データ絶対値|g|iの周
期性νは、公知の技術を使用して求めることができる。例えば、|g|iをフーリエ変換
し、得られる周波数スペクトルのピークの広がり程度に応じて、周期性νを決定することができる。また、|g|iが平均値gavを超える時間間隔の頻度分布を求め、その頻度分
布において、所定時間幅ΔTc中の累積頻度の最大値が全体数に占める割合を、周期性νとしてもよい。
The periodicity ν of the acceleration data absolute value | g | i that is the time series data of the time interval Δt in the evaluation time width T 1 can be obtained using a known technique. For example, | g | i the Fourier transform, depending on the degree peak broadening of the resulting frequency spectrum, it is possible to determine the periodicity [nu. Further, a frequency distribution of time intervals in which | g | i exceeds the average value g av is obtained, and the ratio of the maximum value of the cumulative frequency in the predetermined time width ΔTc to the total number in the frequency distribution is also defined as the periodicity ν. Good.
ステップS34において、ステップS33で求めた標準偏差σ及び周期性νを用いて歩行状態か否かを判断する。具体的には、σstill≦σ≦σwalk且つ ν>νwalk であれば
、歩行状態と判断してステップS35に移行し、そうで無ければ、歩行状態でないと判断してステップS38に移行する。σstill、σwalk、νwalkは、ステップS31での初期
設定で設定された基準値である。
In step S34, it is determined whether it is a walking state using the standard deviation (sigma) and periodicity (nu) calculated | required by step S33. Specifically, if σ still ≦ σ ≦ σ walk and ν> ν walk , it is determined that the user is in the walking state, and the process proceeds to step S35. Otherwise, it is determined that the user is not in the walking state, and the process proceeds to step S38. . σ still , σ walk , and ν walk are reference values set in the initial setting in step S31.
ステップS35において、ステップS34よりも厳しい条件で、安定した歩行状態か否かを判断する。即ち、σw0≦σ≦σw1 且つ ν>νw0 であれば、安定した歩行状態と判
断してステップS36に移行し、そうで無ければ、安定した歩行状態でないと判断してステップS39に移行する。ここで、σstill<σw0 、σw1≦σwalk 、νwalk<νw0であ
る。
In step S35, it is determined whether or not the walking state is stable under conditions stricter than those in step S34. That is, if σ w0 ≦ σ ≦ σ w1 and ν> ν w0 , it is determined that the walking state is stable, and the process proceeds to step S36. Otherwise, it is determined that the walking state is not stable and the process proceeds to step S39. To do. Here, σ still <σ w0 , σ w1 ≦ σ walk , and ν walk <ν w0 .
ステップS36において、ステップS32で読み出した加速度データ(gxi,gyi,gzi)(i=k〜k+N1−1)に対して主成分分析を行い、身体軸を求める。安定した歩
行状態では、重力方向に対して同一人では同じ姿勢が保たれている特性がある。従って、安定的な歩行状態における加速度ベクトルに対する主成分分析によって得られる第1〜第3主成分を身体軸とする。即ち、第1〜第3主成分を、それぞれ歩行時における身体の上下方向(重力加速度方向)、前後方向、横方向とする。
In step S36, principal component analysis is performed on the acceleration data (g xi , g yi , g zi ) (i = k to k + N 1 −1) read out in step S32 to obtain a body axis. In a stable walking state, there is a characteristic that the same posture is maintained by the same person with respect to the direction of gravity. Therefore, the first to third principal components obtained by principal component analysis on the acceleration vector in a stable walking state are taken as body axes. That is, the first to third principal components are respectively the vertical direction (gravity acceleration direction), the front-rear direction, and the horizontal direction of the body during walking.
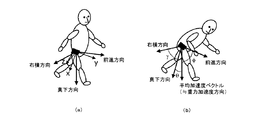
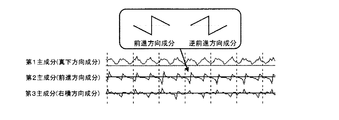
ステップS37において、ステップS36で得られた身体軸(第1〜第3主成分)方向の加速度成分の変動から、身体の真下方向、前方向(前進方向)、及び右横方向(図4の(a)参照)を求め、記録部3に記録する。ステップS36で得られた第1〜第3主成分を身体軸として使用する場合、各軸の正方向には2方向の任意性がある。即ち、主成分分析だけでは身体軸の正負の方向を一意に決定することができない。従って、まず、歩行状態の平均加速度ベクトルを求め、平均加速度ベクトルの方向に近い第1主成分の方向を、身体の真下方向として決定する。次に、第2主成分の一方の方向を仮の正方向として、第2主成分方向の加速度成分を求め、求めた加速度成分の時間変化パターンによって、身体の前後方向を決定する。具体的には、図5に示したように、相互に時間軸に関して対称な波形である2つのノコギリ波形との類似度を判断する。2つのノコギリ波の一方は、緩やかに減少した後に急峻に増加し、その後再び緩やかに減少する(例えば、図5の「前進方向成分」と記した波形)、他方は緩やかに増加した後に急峻に減少し、その後再び緩やかに増加する(例えば、図5の「逆前進方向成分」と記した波形)。図5の中段の波形が第2主成分方向の加速度成分であり、これは「前進方向成分」に類似する波形であるので、第2主成分の正方向を身体の前方向(前進方向)と決定する。一方、2主成分方向の加速度成分が、逆前進方向成分のノコギリ波に類似している場合には、第2主成分の負方向を身体の前方向(前進方向)と決定する。最後に、決定された真下方向と前進方向とに対して右手系で直交する方向に近い第3主成分の方向を、身体の右横方向として決定する。尚、類似度は、公知のマッチング技術を用いて算出すればよい。例えば、第2主成分方向の加速度成分の波形と、判断基準とするノコギリ波形との相関を求めて、類似度を判断すればよい。また、ノコギリ波との類似度の判断方法として、時間軸に関して対称な2つのノコギリ波形の特徴量(例えば、微分係数)の違いに注目し、第2主成分方向の加速度成分の波形に関して同じ特徴量(微分係数)を計算し、これを用いて判断してもよい。また、ノコギリ波全体との類似度(特徴量を含む)の代りに、ノコギリ波の一部、例えば、足の蹴りだしに起因する加速度の急峻な変化部分や、加速度が緩やかに減少する部分との類似
度(特徴量を含む)を判断の基準にしてもよい。
In step S37, from the fluctuation of the acceleration component in the body axis (first to third principal components) direction obtained in step S36, the direction directly below the body, the forward direction (forward direction), and the right lateral direction ((( a) see) is recorded and recorded in the recording unit 3. When the first to third principal components obtained in step S36 are used as body axes, there are two directions in the positive direction of each axis. In other words, the positive and negative directions of the body axis cannot be uniquely determined only by principal component analysis. Therefore, first, the average acceleration vector of the walking state is obtained, and the direction of the first principal component close to the direction of the average acceleration vector is determined as the direction directly below the body. Next, an acceleration component in the second principal component direction is obtained with one direction of the second principal component as a provisional positive direction, and the front-rear direction of the body is determined based on the time change pattern of the obtained acceleration component. Specifically, as shown in FIG. 5, the similarity between two sawtooth waveforms that are symmetrical with respect to the time axis is determined. One of the two sawtooth waves increases slowly after decreasing gently, and then decreases gently again (for example, the waveform indicated as “forward component” in FIG. 5), and the other increases sharply after increasing slowly. After that, it gradually increases again (for example, a waveform indicated as “reverse forward direction component” in FIG. 5). The middle waveform in FIG. 5 is the acceleration component in the second principal component direction, which is a waveform similar to the “forward component”, so that the positive direction of the second principal component is the forward direction (forward direction) of the body. decide. On the other hand, when the acceleration component in the two principal components direction is similar to the sawtooth wave in the reverse advance direction component, the negative direction of the second principal component is determined as the forward direction (forward direction) of the body. Finally, the direction of the third principal component close to the direction orthogonal to the determined right-down direction and the forward direction in the right hand system is determined as the right lateral direction of the body. Note that the similarity may be calculated using a known matching technique. For example, the degree of similarity may be determined by obtaining a correlation between the waveform of the acceleration component in the second principal component direction and a sawtooth waveform as a determination reference. Also, as a method of determining the similarity to the sawtooth wave, paying attention to the difference in feature quantity (for example, differential coefficient) of two sawtooth waveforms symmetric with respect to the time axis, the same feature regarding the waveform of the acceleration component in the second principal component direction A quantity (differential coefficient) may be calculated and used for determination. Also, instead of the similarity with the whole sawtooth wave (including the feature amount), a part of the sawtooth wave, for example, a rapidly changing part of acceleration due to kicking of the foot or a part where the acceleration gradually decreases The similarity (including the feature amount) may be used as a criterion for determination.
ステップS38において、ステップS33で計算した標準偏差σ、周期性νを用いて、歩行状態以外の身体状態を判断する。具体的には、σwalk<σ≦σshock且つν>νwalk
であれば「走行状態」、σ<σstillであれば「静止状態」、σ>σshockであれば転倒などの「衝撃状態」、そしてこれらの状態及び歩行状態のいずれにも該当しない場合には、「その他の状態」と決定する。
In step S38, the body state other than the walking state is determined using the standard deviation σ and the periodicity ν calculated in step S33. Specifically, σ walk <σ ≦ σ shock and ν> ν walk
If it is "running state", if σ <σ still , "still state", if σ> σ shock , "impact state" such as falling, and if neither of these states nor walking state Is determined as “other state”.
ステップS39において、ステップS38での身体状態の判定結果が「衝撃状態」以外であった場合、傾斜角算出時間T3毎に平均の加速度ベクトルを計算し、記録部3から身体軸の情報を読み出し、平均の加速度ベクトルが身体軸と成す角度(身体傾斜角)を求める。即ち、図4の(b)に示したように、平均加速度ベクトルがそれぞれの身体軸(真下方向、前進方向、右横方向)と成す3つの角度θ、φ、γを求める。ここで、求めたθから、姿勢判定を行うこともできる。例えば、ステップS31で基準値θ0、θ1、θ2を初
期設定し、θ0<θ≦θ1であれば「傾斜小」、θ1<θ≦θ2であれば「傾斜中」、θ≧θ2であれば「傾斜大」と判断する。
In step S39, when the determination result in physical condition in step S38 is other than "impact state", the acceleration vector of the average calculated for each tilt angle calculation time T 3, reads the information of the body axis from the recording unit 3 The angle (body inclination angle) formed by the average acceleration vector and the body axis is obtained. That is, as shown in FIG. 4B, three angles θ, φ, and γ that the average acceleration vector forms with each body axis (directly downward direction, forward direction, and right lateral direction) are obtained. Here, posture determination can also be performed from the obtained θ. For example, in step S31, the reference values θ 0 , θ 1 , and θ 2 are initially set. If θ 0 <θ ≦ θ 1 , “inclination is small”, and if θ 1 <θ ≦ θ 2 is “inclining” If θ ≧ θ 2 , it is determined that “the inclination is large”.
ステップS40において、処理対象の加速度データがN1(評価時間幅T1に対応)以上残っているか否を判断し、残っていないと判断するまで、ステップS41に移行し、カウンタkにΔk(Δk=ΔT1/Δt)を加算した値を新たなカウンタkとし、上記したステップS32〜S39を繰り返す。 In step S40, it is determined whether or not the acceleration data to be processed remains N 1 (corresponding to the evaluation time width T 1 ) or more, and the process proceeds to step S41 until Δk (Δk = ΔT 1 / Δt) is added as a new counter k, and the above steps S32 to S39 are repeated.
以上によって、安定的な歩行状態の加速度データから身体軸を精度良く決定することができ、その後、決定した身体軸と平均の加速度ベクトルとの成す角度として、身体の傾斜角度を精度よく求めることができる。 As described above, the body axis can be accurately determined from the acceleration data in the stable walking state, and then the body inclination angle can be accurately determined as the angle formed by the determined body axis and the average acceleration vector. it can.
尚、処理対象の加速度データによっては、ステップS36、S37での処理が一度も行われないまま、ステップS39の処理が行われることがある。その場合、身体軸が決定されていないので、意味のある身体傾斜角が計算されない。従って、身体軸を計算したか否かを表すフラグを設け、ステップS39においてフラグの状態を判断し、身体軸が計算されていなければ、上記したステップS39での処理を実行しないようにすればよい。若しくは、ステップS31での初期設定において、身体軸方向の初期値を設定しておいてもよい。さらには、身体軸が決定さていない期間の身体傾斜角の算出結果は除外することとすれば、身体軸方向の初期値を設定しなくてもよい。 Depending on the acceleration data to be processed, the process in step S39 may be performed without performing the processes in steps S36 and S37. In that case, a meaningful body tilt angle is not calculated because the body axis has not been determined. Therefore, a flag indicating whether or not the body axis has been calculated is provided, the state of the flag is determined in step S39, and if the body axis has not been calculated, the processing in step S39 described above may not be executed. . Alternatively, in the initial setting in step S31, an initial value in the body axis direction may be set. Furthermore, if the calculation result of the body tilt angle during a period when the body axis is not determined is excluded, the initial value in the body axis direction may not be set.
図6に、本機能を実測した加速度データに適用した実験結果を示す。4つの同種の加速度センサを人体腰部の前後左右の4箇所に、特別な位置合わせを行うことなく装着して、歩行、椅子への着座、正面方向への屈み込み、右からの覗き込み、左からの覗き込みの一連の動作を行って、それぞれの加速度センサから出力される加速度データを記録し、このデータを対象として図3に示した一連の処理を実行した。評価時間幅T1=5(秒)、傾
斜角算出時間T3=1(秒)である。図6には、最上段から、前側、左側、後側、右側に取り付けた加速度センサに関するデータを示している。図6の左側に、「(a)3軸加速度情報」として示した各段の信号波形は、加速度センサから取得したXYZ軸の加速度成分を表し、右側の「(b)身体傾斜角」として示した信号波形は、決定した身体軸を用いて計算した身体傾斜角θ、φ、γ(実際には、θ、φ−90、γ−90)を表している。身体傾斜角の一部を数値で付記している。身体傾斜角の各段のデータを比較すると、本機能によって、身体への加速度センサの装着位置及び装着方向に依らずに、ほぼ等しい身体傾斜角を求めることができ、着座、正面への屈み込み、右からの覗き込み、左からの覗き込みを識別できていることがわかる。
FIG. 6 shows a result of an experiment in which this function is applied to measured acceleration data. Four similar types of acceleration sensors are mounted on the front, back, left, and right of the human body without special positioning, walking, sitting on a chair, bending in the front direction, looking from the right, looking left A series of operations for peeping through were performed, acceleration data output from each acceleration sensor was recorded, and a series of processing shown in FIG. 3 was executed on this data. Evaluation time width T 1 = 5 (seconds), tilt angle calculation time T 3 = 1 (seconds). FIG. 6 shows data related to acceleration sensors attached to the front side, the left side, the rear side, and the right side from the top. The signal waveform of each stage shown as “(a) 3-axis acceleration information” on the left side of FIG. 6 represents the XYZ-axis acceleration components acquired from the acceleration sensor, and is shown as “(b) body inclination angle” on the right side. The signal waveforms represent body inclination angles θ, φ, γ (actually, θ, φ-90, γ-90) calculated using the determined body axis. A part of the body inclination angle is added numerically. Comparing the data of each stage of body tilt angle, this function can obtain almost equal body tilt angle regardless of the mounting position and mounting direction of the acceleration sensor on the body, and seated and bent into the front It can be seen that the peep from the right and the peep from the left can be identified.
以上において、図1に示した構成の身体状態検出装置に関して説明したが、これに限定されず、種々変更、拡張して構成することができる。 In the above description, the body state detection apparatus having the configuration shown in FIG. 1 has been described. However, the present invention is not limited to this, and various changes and expansions can be made.
また、図1に示した各構成部の全てを一つのユニットに組み込み、そのユニットを身体に取り付けても良く、加速度センサとデータ採取部とを一つのユニットに組み込み、そのユニットのみを身体に取り付けてもよい。前者の場合には処理結果を、例えば、無線通信によって別の処理装置にワイヤレス伝送してもよい。後者の場合にはデータ採取部から出力されるディジタルデータを、例えば、無線通信によって記録部にワイヤレス伝送してもよい。 In addition, all the components shown in FIG. 1 may be incorporated into one unit, and the unit may be attached to the body. The acceleration sensor and the data collection unit may be incorporated into one unit, and only that unit is attached to the body. May be. In the former case, the processing result may be wirelessly transmitted to another processing apparatus by wireless communication, for example. In the latter case, the digital data output from the data collection unit may be wirelessly transmitted to the recording unit by wireless communication, for example.
また、図3に示した処理は、各ステップの順序を変更するなど、種々変更して実行することができる。例えば、図3において、ステップS34での歩行状態の検出処理をステップS38に含めてもよい。その場合、最初にステップS35の高い周期性の検出処理が行われる。 Further, the processing shown in FIG. 3 can be executed with various changes such as changing the order of the steps. For example, in FIG. 3, the walking state detection process in step S34 may be included in step S38. In that case, the high periodicity detection process of step S35 is first performed.
また、身体軸の方向は、真下方向、前進方向、右横方向に限定されず、それらの逆方向でもよく、左手系の軸であってもよい。 Further, the direction of the body axis is not limited to the downward direction, the forward direction, and the right lateral direction, and may be the opposite direction or a left-handed axis.
また、上記の歩行状態検出機能においては、評価時間幅T1(時刻t〜t+T1)内の加速度データを用いて、時刻t+T1におけるフラグflag(j)を決定したが、これに限
定されず、t〜t+T1の区間内の任意の時刻t+τにおけるフラグflag(j)を決定
してもよい。ここで、τ<T1である。その場合、シフト時間幅ΔT1を考慮すると、決
定されたフラグflag(j)は、時刻t+τ〜t+τ+ΔT1の間維持される。例えば、τ=T1/2とすることができる。
In the above-described walking state detection function, the flag flag (j) at time t + T 1 is determined using acceleration data within the evaluation time width T 1 (time t to t + T 1 ). However, the present invention is not limited to this. , Flag flag (j) at an arbitrary time t + τ in the section from t to t + T 1 may be determined. Here, τ <T 1 . In that case, when the shift time width ΔT 1 is taken into consideration, the determined flag flag (j) is maintained during the time t + τ to t + τ + ΔT 1 . For example, τ = T 1/2 .
また、周期性の検出には種々の方法を用いることができる。例えば、所定期間毎の加速度データに関して、フーリエ変換などにより、絶対値の周波数解析を行い、含まれる周波数成分の割合によって歩行状態、安定した歩行状態を判定してもよい。また、加速度データの絶対値ではなく、成分毎に周波数解析を行ってもよい。 Various methods can be used to detect periodicity. For example, with respect to acceleration data for each predetermined period, absolute value frequency analysis may be performed by Fourier transform or the like, and a walking state or a stable walking state may be determined based on a ratio of frequency components included. Moreover, you may perform a frequency analysis for every component instead of the absolute value of acceleration data.
また、上記した高精度の身体姿勢の検出機能では、予め記録部に記録されている加速度データを処理する場合を説明したが、データの採取と並行してリアルタイムに処理を行ってもよい。その場合、例えば、図9のステップS31の処理を、所定数の加速度データを採取する処理とすればよい。 In the above-described high-accuracy body posture detection function, the case of processing acceleration data recorded in advance in the recording unit has been described. However, the processing may be performed in real time in parallel with data collection. In that case, for example, the process of step S31 of FIG. 9 may be a process of collecting a predetermined number of acceleration data.
1 3軸加速度センサ
2 データ採取部
3 記録部
4 メモリ部
5 処理部
1 3-
Claims (15)
該3軸加速度センサから出力される加速度ベクトルデータを所定のサンプリング間隔で採取するデータ採取手段と、
処理手段とを備え、
前記処理手段が、
連続して採取された前記加速度ベクトルデータを用い、前記身体の歩行状態を検出し、
前記歩行状態として検出された期間内の連続する加速度ベクトルデータを用いて重力加速度ベクトル及び身体軸を決定し、
連続して採取された前記加速度ベクトルデータに関して、各々の加速度ベクトルの絶対値を計算し、さらに、これらの絶対値の平均値、標準偏差及び周期性を計算し、
前記標準偏差が所定範囲内にあり、且つ前記周期性が所定値より大きい場合に、前記歩行状態と判断することを特徴とする身体状態検出装置。 A three-axis acceleration sensor worn on the body;
Data collection means for collecting acceleration vector data output from the three-axis acceleration sensor at a predetermined sampling interval;
Processing means,
The processing means is
Using the acceleration vector data collected continuously, detecting the walking state of the body,
Determining a gravitational acceleration vector and a body axis using continuous acceleration vector data within a period detected as the walking state;
For the acceleration vector data collected continuously , calculate the absolute value of each acceleration vector , and further calculate the average value, standard deviation and periodicity of these absolute values,
The body state detection device, wherein the walking state is determined when the standard deviation is within a predetermined range and the periodicity is larger than a predetermined value.
前記歩行状態と判断された期間の前記加速度ベクトルデータに対して主成分分析を行い、第1主成分、第2主成分及び第3主成分を前記身体軸とすることを特徴とする請求項1に記載の身体状態検出装置。 The processing means is
2. The principal component analysis is performed on the acceleration vector data for the period determined to be the walking state, and the first principal component, the second principal component, and the third principal component are used as the body axis. The body condition detection apparatus as described in 2.
前記主成分分析の対象とした前記加速度ベクトルデータから平均加速度ベクトルを求め、
該平均加速度ベクトルに近い前記第1主成分の方向を、身体の真下方向と決定し、
前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化に応じて、身体の前進方向を決定し、
前記真下方向及び前記前進方向と、右手系で直交する前記第3主成分の方向を身体の右横方向と決定することを特徴とする請求項2に記載の身体状態検出装置。 The processing means is
An average acceleration vector is obtained from the acceleration vector data as the target of the principal component analysis,
Determining the direction of the first principal component close to the average acceleration vector as a direction directly below the body;
According to the time change of the component of the second principal component direction of the acceleration vector data, determine the body forward direction,
The body state detection device according to claim 2, wherein a direction of the third principal component orthogonal to the right-down direction and the forward direction in a right-handed system is determined as a right lateral direction of the body.
前記第2主成分の一方向を正の方向と仮定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに減少する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向を身体の前進方向と決定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに増加する部分を有
するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向と逆の方向を、身体の前進方向と決定することを特徴とする請求項3に記載の身体状態検出装置。 In the determination of the body advance direction, the processing means,
Assuming that one direction of the second principal component is a positive direction, the time variation of the component of the second principal component direction of the acceleration vector data is similar to all or part of a sawtooth wave having a gradually decreasing portion. In the case, the one direction of the second principal component is determined as a body forward direction, and a sawtooth wave having a portion in which the time change of the component in the second principal component direction of the acceleration vector data gradually increases. 4. The body state detection device according to claim 3, wherein a direction opposite to the one direction of the second principal component is determined as a body advance direction when the whole or part is similar.
前記加速度ベクトルデータの平均加速度ベクトルを求め、
該平均加速度ベクトルと、前記真下方向、前記前進方向及び前記右横方向のそれぞれと成す角度を求めて、前記3軸加速度センサを装着した身体の傾斜角度とすることを特徴とする請求項3又は4に記載の身体状態検出装置。 The processing means is
Obtaining an average acceleration vector of the acceleration vector data;
4. An angle formed by the average acceleration vector and each of the directly downward direction, the forward direction, and the right lateral direction is obtained as an inclination angle of a body wearing the three-axis acceleration sensor. 4. The body state detection device according to 4.
連続して採取された前記加速度ベクトルデータを用い、前記身体の歩行状態を検出する第2ステップと、
前記歩行状態として検出された期間内の連続する加速度ベクトルデータを用いて重力加速度ベクトル及び身体軸を決定する第3ステップとを含み、
前記第2ステップが、
連続して採取された前記加速度ベクトルデータに関して、各々の加速度ベクトルの絶対値を計算し、さらに、これらの絶対値の平均値、標準偏差及び周期性を計算する第4ステップと、
前記標準偏差が所定範囲内にあり、且つ前記周期性が所定値より大きい場合に、前記歩行状態と判断する第5ステップとを含むことを特徴とする身体状態検出方法。 A first step of collecting acceleration vector data at a predetermined sampling interval using a three-axis acceleration sensor mounted on the body;
A second step of detecting the walking state of the body using the acceleration vector data collected continuously;
A third step of determining a gravitational acceleration vector and a body axis using continuous acceleration vector data within a period detected as the walking state,
The second step includes
A fourth step of calculating an absolute value of each acceleration vector with respect to the acceleration vector data collected continuously , and further calculating an average value, a standard deviation and a periodicity of these absolute values;
And a fifth step of determining the walking state when the standard deviation is within a predetermined range and the periodicity is greater than a predetermined value.
前記歩行状態と判断された期間の前記加速度ベクトルデータに対して主成分分析を行い、第1主成分、第2主成分及び第3主成分を前記身体軸とする第6ステップを含むことを特徴とする請求項6に記載の身体状態検出方法。 The fifth step includes
A sixth step of performing a principal component analysis on the acceleration vector data for the period determined to be the walking state and using the first principal component, the second principal component, and the third principal component as the body axis. The body state detection method according to claim 6.
前記主成分分析の対象とした前記加速度ベクトルデータから平均加速度ベクトルを求め、該平均加速度ベクトルに近い前記第1主成分の方向を、身体の真下方向と決定する第7ステップと、
前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化に応じて、身体の前進方向を決定する第8ステップと、
前記真下方向及び前記前進方向と、右手系で直交する前記第3主成分の方向を身体の右横方向と決定する第9ステップとをさらに含むことを特徴とする請求項7に記載の身体状態検出方法。 The fifth step includes
A seventh step of determining an average acceleration vector from the acceleration vector data to be subjected to the principal component analysis, and determining a direction of the first principal component close to the average acceleration vector as a direction directly below the body;
An eighth step of determining a forward direction of the body in accordance with a time change of the component of the second principal component direction of the acceleration vector data;
The body state according to claim 7, further comprising a ninth step of determining the direction of the third principal component orthogonal to the right downward direction and the forward direction in the right hand system as a right lateral direction of the body. Detection method.
前記第2主成分の一方向を正の方向と仮定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに減少する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向を身体の前進方向と決定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに増加する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向と逆の方向を、身体の前進方向と決定するステップであることを特徴とする請求項8に記載の身体状態検出方法。 The eighth step includes
Assuming that one direction of the second principal component is a positive direction, the time variation of the component of the second principal component direction of the acceleration vector data is similar to all or part of a sawtooth wave having a gradually decreasing portion. In the case, the one direction of the second principal component is determined as a body forward direction, and a sawtooth wave having a portion in which the time change of the component in the second principal component direction of the acceleration vector data gradually increases. 9. The body condition detection method according to claim 8, wherein when the whole or part of the body is similar, the direction opposite to the one direction of the second principal component is determined as a body advance direction. .
前記加速度ベクトルデータの平均加速度ベクトルを求める第10ステップと、
該平均加速度ベクトルと、前記真下方向、前記前進方向及び前記右横方向のそれぞれと
成す角度を求めて、前記3軸加速度センサを装着した身体の傾斜角度とする第11ステップとを含むことを特徴とする請求項8又は9に記載の身体状態検出方法。 The third step includes
A tenth step of obtaining an average acceleration vector of the acceleration vector data;
An eleventh step including obtaining an average acceleration vector and an angle formed by each of the right-down direction, the forward direction, and the right-side direction to obtain a tilt angle of a body wearing the three-axis acceleration sensor. The body condition detection method according to claim 8 or 9.
前記3軸加速度センサを用いて加速度ベクトルデータを所定のサンプリング間隔で採取する第1機能と、
連続して採取された前記加速度ベクトルデータを用い、前記身体の歩行状態を検出する第2機能と、
前記歩行状態として検出された期間内の連続する加速度ベクトルデータを用いて重力加速度ベクトル及び身体軸を決定する第3機能とを実現させ、
前記第2機能が、
連続して採取された前記加速度ベクトルデータに関して、各々の加速度ベクトルの絶対値を計算し、さらに、これらの絶対値の平均値、標準偏差及び周期性を計算する第4機能と、
前記標準偏差が所定範囲内にあり、且つ前記周期性が所定値より大きい場合に、前記歩行状態と判断する第5機能とを含むことを特徴とする身体状態検出プログラム。 A body state detection device comprising a three-axis acceleration sensor attached to the body, data collection means, and processing means,
A first function for collecting acceleration vector data at a predetermined sampling interval using the three-axis acceleration sensor;
A second function for detecting the walking state of the body using the acceleration vector data collected continuously;
A third function of determining a gravitational acceleration vector and a body axis using continuous acceleration vector data within a period detected as the walking state;
The second function is
A fourth function for calculating an absolute value of each acceleration vector with respect to the acceleration vector data collected continuously , and further calculating an average value, standard deviation and periodicity of these absolute values;
A body condition detection program comprising: a fifth function for determining the walking state when the standard deviation is within a predetermined range and the periodicity is greater than a predetermined value.
前記歩行状態と判断された期間の前記加速度ベクトルデータに対して主成分分析を行い、第1主成分、第2主成分及び第3主成分を前記身体軸とする第6機能を含むことを特徴とする請求項11に記載の身体状態検出プログラム。 The fifth function is
It includes a sixth function that performs principal component analysis on the acceleration vector data in the period determined to be the walking state and uses the first principal component, the second principal component, and the third principal component as the body axis. The body condition detection program according to claim 11.
前記主成分分析の対象とした前記加速度ベクトルデータから平均加速度ベクトルを求め、該平均加速度ベクトルに近い前記第1主成分の方向を、身体の真下方向と決定する第7機能と、
前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化に応じて、身体の前進方向を決定する第8機能と、
前記真下方向及び前記前進方向と、右手系で直交する前記第3主成分の方向を身体の右横方向と決定する第9機能とをさらに含むことを特徴とする請求項12に記載の身体状態検出プログラム。 The fifth function is
A seventh function for obtaining an average acceleration vector from the acceleration vector data to be subjected to the principal component analysis, and determining a direction of the first principal component close to the average acceleration vector as a direction directly below the body;
An eighth function for determining a forward direction of the body according to a time change of the component of the second principal component direction of the acceleration vector data;
The physical state according to claim 12, further comprising a ninth function for determining the direction of the third principal component orthogonal to the right downward direction and the forward direction in the right-handed system as the right lateral direction of the body. Detection program.
前記第2主成分の一方向を正の方向と仮定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに減少する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向を身体の前進方向と決定し、前記加速度ベクトルデータの前記第2主成分方向の成分の時間変化が、緩やかに増加する部分を有するノコギリ波の全体または一部に類似する場合に、前記第2主成分の前記一方向と逆の方向を、身体の前進方向と決定する機能であることを特徴とする請求項13に記載の身体状態検出プログラム。 The eighth function is
Assuming that one direction of the second principal component is a positive direction, the time variation of the component of the second principal component direction of the acceleration vector data is similar to all or part of a sawtooth wave having a gradually decreasing portion. In the case, the one direction of the second principal component is determined as a body forward direction, and a sawtooth wave having a portion in which the time change of the component in the second principal component direction of the acceleration vector data gradually increases. The body condition detection program according to claim 13, which has a function of determining a direction opposite to the one direction of the second principal component as a body advance direction when similar to the whole or a part. .
前記加速度ベクトルデータの平均加速度ベクトルを求める第10機能と、
該平均加速度ベクトルと、前記真下方向、前記前進方向及び前記右横方向のそれぞれと成す角度を求めて、前記3軸加速度センサを装着した身体の傾斜角度とする第11機能とを含むことを特徴とする請求項13又は14に記載の身体状態検出プログラム。 The third function is
A tenth function for obtaining an average acceleration vector of the acceleration vector data;
And an eleventh function for determining an angle formed by each of the average acceleration vector and each of the right-down direction, the forward direction, and the right-side direction, and setting the inclination angle of the body wearing the three-axis acceleration sensor. The body condition detection program according to claim 13 or 14.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010113174A JP5071822B2 (en) | 2004-11-29 | 2010-05-17 | Physical state detection device, detection method thereof, and detection program |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004344997 | 2004-11-29 | ||
| JP2004344997 | 2004-11-29 | ||
| JP2010113174A JP5071822B2 (en) | 2004-11-29 | 2010-05-17 | Physical state detection device, detection method thereof, and detection program |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005266940A Division JP4547537B2 (en) | 2004-11-29 | 2005-09-14 | BODY STATE DETECTION DEVICE, DETECTION METHOD AND DETECTION PROGRAM |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010172758A JP2010172758A (en) | 2010-08-12 |
| JP5071822B2 true JP5071822B2 (en) | 2012-11-14 |
Family
ID=42704229
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010113174A Expired - Fee Related JP5071822B2 (en) | 2004-11-29 | 2010-05-17 | Physical state detection device, detection method thereof, and detection program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5071822B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017187506A (en) * | 2017-07-05 | 2017-10-12 | ヤフー株式会社 | Estimation device, movement direction estimation method, and movement direction estimation program |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6127873B2 (en) * | 2013-09-27 | 2017-05-17 | 花王株式会社 | Analysis method of walking characteristics |
| JP6424424B2 (en) * | 2013-12-02 | 2018-11-21 | Tdk株式会社 | Behavior estimation device and activity meter |
| FI3847961T3 (en) | 2018-09-03 | 2023-05-11 | Fujitsu Ltd | Walking state determination program, walking state determination method, and information processing device |
| JP7172733B2 (en) * | 2019-02-28 | 2022-11-16 | トヨタ自動車株式会社 | Human Posture Estimation Device |
| JP7056633B2 (en) * | 2019-09-18 | 2022-04-19 | カシオ計算機株式会社 | Judgment device, judgment method and program |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0989584A (en) * | 1995-09-26 | 1997-04-04 | Honda Motor Co Ltd | Portable navigation system |
| JP4881517B2 (en) * | 2001-07-12 | 2012-02-22 | マイクロストーン株式会社 | Physical condition monitoring device |
| JP2004121539A (en) * | 2002-10-02 | 2004-04-22 | Seiko Epson Corp | Body motion detector |
| KR101114722B1 (en) * | 2005-02-11 | 2012-02-29 | 삼성전자주식회사 | Apparatus and method of guiding rout based on step |
-
2010
- 2010-05-17 JP JP2010113174A patent/JP5071822B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017187506A (en) * | 2017-07-05 | 2017-10-12 | ヤフー株式会社 | Estimation device, movement direction estimation method, and movement direction estimation program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010172758A (en) | 2010-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4547537B2 (en) | BODY STATE DETECTION DEVICE, DETECTION METHOD AND DETECTION PROGRAM | |
| JP5071822B2 (en) | Physical state detection device, detection method thereof, and detection program | |
| KR101751760B1 (en) | Method for estimating gait parameter form low limb joint angles | |
| Luinge et al. | Inclination measurement of human movement using a 3-D accelerometer with autocalibration | |
| Sabatini | Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing | |
| EP2255209B1 (en) | Method and apparatus for determining the attachment position of a motion sensing apparatus | |
| Luinge | Inertial sensing of human movement | |
| JP6067693B2 (en) | Detection of transition from sitting to standing | |
| JP5761505B2 (en) | Swing analysis apparatus, swing analysis system, swing analysis method, swing analysis program, and recording medium | |
| JP6288706B2 (en) | Upper body motion measurement system and upper body motion measurement method | |
| FI125723B (en) | Portable activity monitoring device and associated process | |
| JP2010005033A (en) | Walking motion analyzer | |
| JP5421571B2 (en) | Walking characteristic evaluation system and locus generation method | |
| JP2012515570A (en) | Determining user energy consumption | |
| Tumkur et al. | Modeling human walking for step detection and stride determination by 3-axis accelerometer readings in pedometer | |
| JP2012502721A (en) | Force measuring method and apparatus | |
| JP2008262522A (en) | Pedometer | |
| US20130186202A1 (en) | Device and method for recording at least one acceleration and a corresponding computer program and a corresponding computer-readable storage medium and also use of such a device | |
| Teruyama et al. | Effectiveness of Variable‐Gain Kalman Filter Based on Angle Error Calculated from Acceleration Signals in Lower Limb Angle Measurement with Inertial Sensors | |
| CN115530815A (en) | Gait time phase recognition method based on angular velocity sensor | |
| JP6794793B2 (en) | Walking state estimation method, walking state estimation program and information processing device | |
| JP2020192307A (en) | Lower limb muscle strength evaluation method, lower limb muscle strength evaluation program, lower limb muscle strength evaluation device, and lower limb muscle strength evaluation system | |
| JP6416722B2 (en) | Step counting device, step counting method, and program | |
| JP4405200B2 (en) | Walking time calculation device and walking distance calculation device using the same | |
| KR20170098022A (en) | System and Method for improving measurement accuracy of the momentum in a health care system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100614 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120313 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120509 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120807 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120809 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150831 Year of fee payment: 3 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |