非特許文献1に記載されているように,BDにおいて30GB相当以上の高密度記録を実現するためには,拘束長が5以上のPRML方式が用いられている。BDの光学系条件(波長405nm,対物レンズ開口数0.85)では線方向に記録密度を高めた場合,容量が約30GB以上で最短ラン長である2T繰り返し信号の振幅がゼロになる。このとき,PRML方式としては2T繰り返し信号の目標振幅がゼロのPR(1,2,2,2,1)方式等が適することは周知のことである。こうした大容量光ディスクにおいて,再生信号の品質を評価するためには,PRML方式の誤り確率に基づく各種の評価技術,例えば特許文献1〜5等に記載される評価技術を適用することができる。
特許文献1〜5等に記載される再生信号の評価技術は,それぞれ構成が異なるが,共通技術として,PRMLデコーダから出力される2値化ビット列の中から最も確からしい評価ビット列を検索・抽出する工程が含まれている。特許文献1に記載されている最も確からしい状態遷移列と2番目に確からしい状態遷移列,および特許文献3に記載されている正パターンと誤パターンはそれぞれ再生信号との距離を図るべき目標ビット列という意味で同じものである。以下,これらを総称して評価ビット列と呼ぶことにする。
評価ビット列の長さMはPRML方式の拘束長Nと,評価ビット列に含まれる2Tパターンの連続数N2Tを用いて,M=2N−1+2N2Tと一般化することが可能である。ここでN2Tは0,1,2,...となる整数である。N2T=0,1,2は,前述の表記に従えば,それぞれエッジシフト,2Tシフト,2T玉突きシフトに対応するものである。また,N2Tが0,1,2,3,4,5および6のとき,ハミング距離はそれぞれ1,2,3,4,5,6および7であって,第1と第2の評価ビット列の間のハミング距離は(N2T+1)となる。評価ビット列は2Mとおりのビット列の中から,最も確からしい第1の評価ビット列と第1の評価ビット列の目標信号からののユークリッド距離が最小となる目標信号に対応する第2の評価ビット列との関係を抽出する機械的な操作によって,容易に列挙することができる。PRML方式により得られる2値化ビット列の精度、すなわち、再生信号品質は、拘束長が長いほど向上する傾向があり、今後、多層BDや高速再生など、信号再生条件が厳しくなるにつれて、PRML方式の拘束長は長くなっていくことが避けられないものと考えられる。
図2は,拘束長5のPR(1,2,2,2,1)方式に対応した評価ビット列の例であり,同様なものは特許文献4にも記載されている。図に見られるように,拘束長5のPRML方式を用い,PRMLデコーダ2値化ビット列の中から評価ビット列を検索・抽出して再生信号の品質評価を実施する場合,ハミング距離ごとに18組で合計54組,すなわち108個の評価ビット列が列挙される。再生信号の評価を行う評価回路においては,これらの評価ビット列の検索・抽出処理を並行に実施する必要がある。
図3は,拘束長6のPR(1,2,3,3,2,1)に対応した評価ビット列を同様な表記に従って記述したものである。同様にハミング距離1,2および3に対応した評価ビット列の組が,ハミング距離ごとに分類して列挙したもので,ハミング距離ごとに50組,合計300個の評価ビット列が存在することが判る。この場合,ハミング距離が1,2および3のとき,各評価ビット列のビット長は,それぞれ11,13および15である。また,評価ビット列Aと評価ビット列Bの目標信号のユークリッド距離はそれぞれ28,20および20である。この場合,PRML方式によって再生信号から複号された2値化ビット列の中から,全ての評価ビット列の検索・抽出を行うためには合計300の一致判定回路が必要である。
図4はPRML方式における拘束長と検出評価ビット列の数の関係をN2Tごとに分けて示したグラフである。図に見られるように,PRML方式の拘束長の増加に従って,評価ビット列の総数が指数関数的に急激に増加し,拘束長N=9でN2T=6の場合,検索・抽出すべき評価ビット列の総数が12000以上と膨大な数になることが判る。図5は,図4に示した関係を表にまとめたものである。
以上のように,PRMLの信号品質を評価ビット列を用いて評価する場合、高密度記録された信号(例えば、BDであれば容量が30GB以上程度)に対しては、対応する回路の規模がPRML方式の拘束長の増加に応じて,指数関数的に増大してしまうという課題がある。本発明で解決しようとする課題は,PRML方式を用いる場合の回路規模の増大を防ぎ,簡素な回路構成で再生信号の品質を評価可能な再生信号の評価方法と提供と,それを用いた光ディスク装置の提供である。
本発明ではBDシステムを基本として,30GB以上の大容量化を図ることを目指しているため,以下,変調符号の最短ラン長は2Tを前提として説明を進める。
PRMLデコーダから出力された2値化ビット列の中に,所定の評価ビット列が存在するかどうかの判定の簡略化を図るための概念を図6により説明する。これは,図2に示した拘束長5のPR(1,2,2,2,1)に対応した評価ビット列から共通項を抽出し整理したものである。図に見られるように,ハミング距離1,2,3に応じた108個の評価ビット列は,それぞれビット長5,7,9の主ビット列と,その両端に付加された2ビットの副ビット列XX,YYによって表現することができる。ここで,主ビット列は ハミング距離1の場合,「00011」,「00111」,「11100」,および「11000」の4個,ハミング距離2の場合,「0001100」,「0011000」,「1110011」,および「1100111」の4個,ハミング距離3の場合,「000110011」,「001100111」,「111001100」,および「110011000」の4個であり,副ビット列AAは「00」,「10」,もしくは「11」であり,副ビット列BBは「00」,「01」,もしくは「11」である。このように,評価ビット列を整理して記述することが回路規模の削減の簡略化を図る上での足がかりとなる。
拘束長4のPR(1,2,2,1)に対応した評価ビット列は全部で24個ある。同様の方法で主ビット列と福ビット列に分けて整理した結果を図7に示す。図に見られるように,主ビット列はハミング距離1の場合,「00011」,「00111」,「11100」,および「11000」の4個,ハミング距離2の場合,「0001100」,「0011000」,「1110011」,および「1100111」の4個,ハミング距離3の場合,「000110011」,「001100111」,「111001100」,および「110011000」の4個であって,図6に示したものと同一である。一方,副ビット列Aは「0」,もしくは「1」であり,副ビット列Bも同様に「0」,もしくは「1」である。
同様に,拘束長6のPR(1,2,3,3,2,1)に対応した評価ビット列から共通項を抽出し整理した結果を図8に示す。ここでも,主ビット列は,図6に示したものと同
一である。一方,副ビット列AAAは「000」,「011」,「100」,「110」,もしくは「111」であり,副ビット列BBBは「000」,「001」,「100」,「110」,もしくは「111」であり,副ビット列CCCは「000」,「001」,「011」,「110」,もしくは「111」であり,副ビット列DDDは「000」,「001」,「011」,「100」,もしくは「111」である。
このように,PRML方式の拘束長に依存せずに主ビット列が定まる理由を説明する。最短ラン長mが2Tの場合,エッジシフトによって1ビットが変化することを表現するためにビット列の最短長は最短ラン長を2倍して1を加えた値,すなわち2m+1=5ビットである。これが主ビット列の実体である。同様にして,評価ビット列に含まれる連続する2Tの数N2Tを用いて一般化すると,主ビット列の長さは(2m+1+2N2T)となる。このように,主ビット列とは,評価ビット列に含まれる連続する2Tの数に応じて定まる,最短のビット列という意味をもつ。一方,前述のように,再生信号とのユークリッド距離の算出に必要なビット列の長は,PRML方式の拘束長Nを用いて,(2N-1+2N2T)である。両者のビット列の長の差は(2N-1+2N2T)−(2m+1+2N2T)=2(N−m−1)となって,これが必ず偶数であることが判る。最短ラン長m=2の場合,この値は2(N−3)である。図6から8に示したように,副ビット列の長さは拘束長4,5,6に対応して,それぞれ1,2,3であった。これから副ビット列の長さが(N−3)に等しいことが判る。副ビット列とは長さが(N−3)であって,主ビット列の両側に付加され,PRML方式の拘束長に依存して,ユークリッド距離を算出するために必要な境界条件を定めるためのビット列としての意味を持つものである。副ビット列の長さがハミング距離に依存しない理由もここにある。
以上のように,PRML方式の拘束長Nに依存しない主ビット列と,主ビット列の両端に付加された長さ(N−3)の副ビット列を用いれば,評価ビット列を整理して表現することが可能である。
副ビット列について別の見方をすると,副ビット列とは再生信号と目標信号との間のユークリッド距離を算出するために最短ラン長の制限を満たすように,かつユークリッド距離算出における境界条件を定める役割を担うために主ビット列に付加されたものである。従って,PRMLデコーダから出力された2値化ビット列の対応箇所と,副ビット列は同一のものである必要がある。一般に,最短ラン長が制限された変調符号に対応したPRML方式では最短ラン長未満のステートが内部に存在せず,結果として出力される2値化ビット列も最短ラン長未満のビット列を含まない。従って,副ビット列を含めて生成された第1及び第2の評価ビット列は,2値化ビット列から,対応する箇所からら副ビット列を抽出,コピーするという操作によって自動的に満たされるものである。この考えに従えば,2値化ビット列から検索・抽出するビット列は上に示した主ビット列のみでよいことが判る。
以上の説明の要点をまとめる。
(1)評価ビット列は、主ビット列と、当該主ビット列の両側(主ビット列の先頭ビットと終端ビットの外側)に設けられた副ビット列の和で表現することができる。
(2)主ビット列は、ハミング距離ごとに4パターン存在する。また、主ビット列の長さは、最短ラン長とその連続数によって(2m+1+2N2T)のように定まり、PRMLの拘束長Nには依存しない。
(3)副ビット列は2値化ビット列の対応する箇所のビット列と等しい。また、評価ビット列の長さは、拘束長をNとすると、(N−3)となる。
これらを利用すると,2値化ビット列の中の検査部分が,主ビット列に一致するどうかを判定するだけで,評価ビット列の判定を実施することができる。最も確からしい第1の評価ビット列を定めるには,PRMLデコーダから出力された2値化ビット列の中に所定の主ビット列が存在するかどうかを判定し,存在する場合には所定の長さの副ビット列を2値化ビット列からコピーして用いればよい。
次に,2番目に確からしい第2の評価ビット列の生成方法について説明する。
図9は第2の主ビット列を生成するための操作をまとめたものである。図中,主ビット列(Main bit array)の欄には,上に示した主ビット列を列挙してある。上に説明した主ビット列と副ビット列の関係から,第1の評価ビット列において,これに含まれるに第1の主ビット列をユークリッド距離が最小となる第2の主ビット列で置換することによって,第2の評価ビット列を生成することができる。ハミング距離ごとに存在する4個の主ビット列を主ビット列群と呼ぶことにし,ハミング距離と同じ値のグループ番号をつける。同時に,同一の主ビット列群に含まれる4個の主ビット列に順番に1,2,3,4の種別番号をつける。主ビット列の識別はグループ番号−種別番号の関係で,図に示すようにNo.1―1,1−2のようにして行うことにし,これを主ビット列番号と呼ぶ。
第2の主ビット列を生成する方法は図に示すように,第1の主ビット列番号とそれに対応する第2の主ビット列番号を参照することで容易に実現することができる。
同様にして,第2の主ビット列を生成することは,主ビット列中の所定のビットの反転により実現される。例えば,No.1―1の主ビット列「00011」の第3ビットを反転させるとNo.1―2の主ビット列「00111」と一致する。また,No.2−1の「0001100」の第3ビットおよび第5ビットを反転させるとNo.2−2の「0011000」と一致する。このように,ハミング距離ごとに同一のビット反転操作によって,対応する主ビット列を生成することができる。図中には反転すべきビット列を示すビット列反転マスクを合わせて示している。ビット列反転マスクでは反転すべきビット位置を1として,例えば “00100”,“0010100”のように表現することができる。
以上の説明に従って,2値化信号の中の評価ビット列判定を簡略化する方法を摸式的に図10に示す。本発明による評価ビット列判定は,図に示したように,以下のステップによって行う。
(Step−1)
負でない整数iを用いて,PRMLデコーダから出力される2値化ビット列に5+2iビット,すなわち主ビット列と等しいビット長の検出窓を開いて,主ビット列との一致判定を行う。ここで,iは前述のN2Tに等しい意味をもち,ハミング距離を用いて,i=(ハミング距離)−1である。
図10の例では,ハミング距離1に対応した主ビット列「00011」,「00111」,「11100」および「11000」との一致判定が,5(=5+2×0)ビットの検出ウィンドウを用いて行われ,主ビット列「00011」との一致が検出された。その他のハミング距離に対応した主ビット列との一致判定も同様にして行われる。
(Step−2)
検出ウィンドウに主ビット列と一致するビット列が出現した場合,2値化ビット列から,主ビット列に一致した部分と,その両隣の(N−3)ビット長の2つの副ビット列と共に切り出して第1の評価ビット列を生成する。
図10の例では,一致検出された主ビット列「00011」が,その左隣の副ビット列
「11」および右隣の副ビット列「11」と共に切り出され,第1の評価ビット列「110001111」が生成された。
(Step−3)
次に,第1の評価ビット列に含まれる第1の主ビット列の部分に所定の操作を施すことによって,対応する第2の主ビット列に変換し,第2の評価ビット列を生成する。
図10の例では,第1の評価ビット列「110001111」の中の主ビット列「00011」が主ビット列「00111」に変換され,第2の評価ビット列「110011111」が生成された。
このようにして生成した最も確からしい第1の評価ビット列および2番目に確からしい第2の評価ビット列をユークリッド距離算出回路に転送することによって,再生信号とのユークリッド距離が算出される。
本方法による評価ビット列判別の簡略化の効果は,例えば拘束長5のとき左右の副ビット列がそれぞれ3種類あることから,3×3=9個の評価ビット列を1回の判定で実現するのと等価であって,判別する評価ビット列の数を1/9に削減した効果が得られる。従って,拘束長が長いほど,副ビット列の種類が増えるため,簡略化の効果は大きくなる。
図5を参照して本方法の効果を述べる。PRML方式の拘束長が9で,エッジシフト誤り(i=0)だけを評価する場合,評価ビット列の総数は1764であり,検査・抽出を行う回路は同数だけ必要である。一方,本方法によれば,主ビット列だけを検査すればよいので,検査・抽出処理を実施する回路は4個あればよい。本発明によって,回路規模が大幅に削減できることが判る。
本発明の再生信号の評価方法に従う評価回路をは容易に実現することができ,これを用いれば簡素な構成で再生信号の評価が実現できる光ディスク装置を提供することができる。
以上のように,本発明によって,回路規模を大幅に縮小可能であり,簡素な回路構成で再生信号の品質を評価可能な再生信号の評価方法と提供と,それを用いた光ディスク装置を提供することができた。BDにおいて30GB相当以上の高密度記録を実現するためには、必要な再生信号精度を確保する上で、拘束長が5以上のPRML方式が必要になるものと考えられる。従って本発明は、PR(1,2,2,2,1)方式のように拘束長5が以上のPRML方式を適用した信号再生処理に特に有効と考えられる。
以下、図面を参照して本実施例による再生信号の評価方法および光ディスク装置について実施形態を説明する。
2値化データ列の中に主ビット列に一致する部位があるかどうかの判定を簡略化するための本実施例の技術を説明するために,主ビット列間の対応関係を図12にまとめる。主ビット列の長さM=5,7,9,・・・ビットであり,これに対応してグループ番号を1,2,3,・・・のように付与する。ここで主ビット列の長さMは主ビット列に含まれる連続2Tの数N2Tを用いて,M=5+2N2Tである。これらは評価するハミング距離=M+1に対応している。図に見られるように、主ビット列グループごとに4通りの主ビット列が存在する。これらに種別番号1,2,3,4をつける。主ビット列番号をグループ番号−種別番号として定義すると,図に示すように主ビット列番号は1−1,1−2,1−3,1−4,2−1,・・・のようになり、各主ビット列に固有な識別番号を定義することができる。
ここで、2つのビット列操作を定義する。第1のビット列操作は特定の位置の要素のビット反転である。これをビット列マスク反転操作と呼ぶことにする。ビット列反転マスク「00100」,「0010100」,…を考え、ビット列マスク反転操作を,ビット列反転マスクの値が1である箇所の主ビット列の要素の値を「1」と「0」の間で反転する操作と定義する。主ビット列の長さMに対し,そのビット要素値を左(デコード時刻の古い順に対応)から1,2,3,・・・とすると,ビット列マスク反転操作は,負でない整数iを用いて,ビット要素値(3+2i)(i=0,1,2,・・・,M−5)の反転操作と同じ意味である。第2のビット列操作は主ビット列の各要素の値を全て「1」と「0」の間で反転する操作である。これを全ビット反転操作と呼ぶことにする。
上の2つのビット列操作を利用して、主ビット列の種別番号の間の関係を整理することができる。ビット列反転マスク操作を利用すると,例えば主ビット列番号1−2,1−4は、それぞれ主ビット列番号1−1,1−3に対してビット列反転マスク操作を施すことで得ることができる。また,全ビット反転操作を利用すると,例えば主ビット列1−3,1−4はそれぞれ主ビット列1−1,1−2に全ビット反転操作を施すことによって得ることができる。主ビット列グループ2以降についても,同様に各グループの主ビット列種別番号1とビット列反転マスクによる操作,および全ビット反転操作を用いて他の主ビット列を得ることができる。これらの関係を利用すると2値化データ列の中に含まれる主ビット列の検索判定を簡素化することが可能となる。具体的な例を次に示す。
図13は主ビット列の検索判定の方法を示す摸式図である。判定すべき主ビット列の長さMと同じ長さ検出窓を用いて、PRMLデコーダから出力される2値化ビット列の中からそのの部分を抜き出す。ここで前述の主ビット列グループ番号GはN2T+1である。グループ番号Gに属する主ビット列のうち、種別番号1と3,2と4は全ビット反転の関係から,ここではこれを利用する。図では主ビット列グループ1の判定に関して示している。検出窓内の2値化ビット列と一致検査する主ビット列種別番号1−1,1−2について,ビットごとのXOR演算を実施すると,結果が「00000」であれば、主ビット列番号1−1または1−2に一致,「11111」であれば完全不一致,すなわち主ビット列番号1−3,または1−4に一致であることが容易に判定可能である。他の主ビット列グループについても同じ操作を行えば,一致する主ビット列が2値化データ列に含まれるかどうかを判定することができる。時刻ごとに2値化ビット列には新しいデータが追加され,検出窓には1ビットシフトした形式の2値化データ列が入ることになるので,各時刻でこうした判定を連続して行えば,全ての2値化データについて,どの主ビット列が含まれるのかを判定することが可能である。
図14は主ビット列の検索判定の別の方法を示す摸式図である。ここでは,図12に列挙した主ビット列の両端の連続する2ビットの値が「00」もしくは「11」であることを利用する。前述と同様に検出窓を用いて2値化データ列を検査する場合,両端の連続する2ビットの値が「00」もしくは「11」のどちらでもない場合には,主ビット列が含まれない。また,両端の連続する2ビットの値が,「00」もしくは「11」の場合,一致する可能性のある主ビット列の候補を絞ることが可能となる。この理由は前述のように,主ビット列識別番号1と3,2と4が全ビット反転の関係にあるためである。両端の連続する2ビットの値と一致候補となる主ビット列の関係を図15にまとめる。図に見られるように,主ビット列グループ1の場合,左側(時刻が新しいデータ側)の2ビットの値が「00」であり右側の2ビットが「11」の場合には,主ビット列の一致候補は主ビット列番号1−1もしくは1−2であり,逆に左側の2ビットが「00」,かつ右側の2ビットが「11」の場合には,一致候補は主ビット列番号1−3もしくは1−4となる。特に,検出窓の左端(時刻が新しいデータ側の2ビット)は全ての主ビット列グループに共通する判定箇所であるため,この判定結果については全ての主ビット列グループで共通利用することができる。従って,検出窓の左端2ビットの値判定を先行して実施し,この値が「00」または「11」でない場合,一致する主ビット列は存在しないため,以下の判定を省略することが可能である。また,前述のように,PRMLデコーダから出力される2値化データ列は基本的にラン長制限を満たすため,図15の関係から,検出窓の左端の2ビットの値だけを用いて,候補となる主ビット列を2つに絞り込むことも可能である。
以上の関係を利用して,2値化データ列の中に主ビット列に一致する部位があるかどうかの判定を行う判定回路の規模を縮小することができる。
次に、2値化データ列の中に所定の主ビット列に一致する部位がある場合に、最も確からしい状態遷移、すなわち第1の評価ビット列と、2番目に確からしい状態遷移、すなわちユークリッド距離が最小となる第2の評価ビット列を生成する方法について述べる。
PRMLデコーダの拘束長をNとし、2値化データ列の中に存在する主ビット列を第1の主ビット列とする。前述の第1の評価ビット列は、2値化データに含まれる第1の主ビット列を含む長さ(2N−1)のビット列である。これに対応する第2の評価ビット列は第1の評価ビット列の中の第1の主ビット列をユークリッド距離が最も近い第2の主ビット列で置き換えたものとなる。従って、第1と第2の評価ビット列を生成する方法の主要な部分は第1の主ビット列から対応する第2の主ビット列を生成する処理となる。
図12を含めて、本実施例で使用する図面では、主ビット列の識別番号1と2、および3と4の関係が,ユークリッド距離が最小の関係となるように整理して示している。したがって、第1の主ビット列からユークリッド距離が最小となる第2の主ビット列を生成する処理は図18に示すように、2値化データ列に含まれる第1の主ビット列の識別番号に応じて対応する第2の主ビット列を選択することで実施可能である。図12に示した主ビット列の識別番号をアドレス情報等として用いれば、図18に示すように、全ての主ビット列を列挙しておき、第1の主ビット列に対応するアドレスの主ビット列を選択することによって、一意に第2の主ビット列を定めることができる。こうした方法を回路に実装する場合には、主ビット列の値とアドレス情報、及び対応する第2の主ビット列のアドレス情報を蓄えた参照テーブルを用いればよい。
また、前述のように、主ビット列識別番号1と2、および3と4の関係はビット列マスク反転操作による相互変換の関係にある。これを利用すると、第1の主ビット列にビット列マスク反転操作を施して第2の主ビット列を生成することも可能である。図19はビット列マスク反転操作によって、第2の主ビット列を生成する方法を摸式的に示したものである。このような操作は,ビットごとのXOR演算等を利用して容易に回路に実装することができる。
図20は第2の主ビット列の生成方法を示す別の実施例である。一般にビットシフト演算はCPUが扱う数値演算の中で最も高速に処理することができる演算の一種である。PRMLの拘束長や扱う変調符号が複数存在する場合、もしくは媒体評価用の特殊な記録データパターンを用いて記録条件調整を行う場合等、CPUにて第2の主ビット列の生成処理を実施することが望ましい場合が多い。こうした場合、シフト演算を基本として第2の主ビット列を生成することにより処理時間の増大を最小にすることが可能である。第2の主ビット列のビット要素を左からb[1]、b[2]、b[3]、…、b[M−2]、b[M−1]、b[M]としたとき、第2の主ビット列のビット要素は図12を参照すると、左側へのビットシフト演算にもとづいたb[1],b[1]、b[2]、…、b[M−3]、b[M−2]、b[M]、もしくは右側へのビットシフト演算に基づいたb[1]、b[3]、b[4]、…、b[M−1]、b[M]、b[M]のどちらかとなる。前者はビット列種別番号が1および3の場合、後者はビット列識別番号が2および4の場合である。図は、これを主ビット列に対する循環型のビットシフト操作と両端ビット値を元の主ビット列の値で置き換える操作として、摸式的に表したものである。
次に,本実施例の主ビット列の別の表現方法について説明する。図16は本実施例の主ビット列群を示す別の実施例である。ここでは,前述の主ビット列識別番号1と2または,3と4のユークリッド距離が最小であることに注目して,これらの不一致ビット要素を「X」として記述したものである。図において,ビット要素の値「Y」は「X」のビット反転を表している。このようなまとめ方をすると,不一致ビットを除く,共通のビット要素を検出することも可能となる。同時に,第1の主ビット列を用いて第2の主ビット列を生成する方法を摸式的に表すこともできる。
図17は図16における不一致ビット要素「X」「Y」を用い,さらにユークリッド距離が最小となる主ビット列同士で,ビット列要素の値が等しいものを「aa」と「bb」で表した場合の本実施例の主ビット列を示すテーブルである。ここで,「aa」は2ビットの値を表し,「bb」は「aa」をビット反転したものである。図に見られるように,主ビット列種別番号の認識は,不一致ビット「X」の値と一致ビット「aa」の値によって一意に定めることが可能である。この2つの独立した値を2ビットのアドレス値と考えることによって,4通りの主ビット列にそれぞれ一意なアドレスを与えて区別することが可能となる。こうした関係を回路に実装することによって,その構成を簡素化することが可能である。
次に,主ビット列による分類を再生信号の品質評価に応用した場合の実施例を示す。比較例として,SbER方式(推定ビットエラー率:Simulated bit Error Rate)による品質評価も説明する。SbER方式においては、最も確からしい第1の評価ビット列と2番目に確からしい第2評価ビット列に対し、再生信号とこれらの評価ビット列に対応する目標信号とのユークリッド距離の差(D値)を求め、更に、第1の評価ビット列ごとにD値の分布を求め,各分布の平均と標準偏差およびハミング距離を用いてビットエラー率を計算(推定)する。SbER方式においては、この推定ビットエラー率が状態遷移の確からしさを示す指標となる。第1の評価ビット列と2番目に確からしい第2評価ビット列は、テーブルなどの形式で保持される。前述のように、光ディスクの高密度化にともなって、使用するPRML方式の拘束長が長くなると、これらの評価ビット列数が指数的に増大してしまう。
本実施例では、ハミング距離当たり4つの主ビット列を導入し、2値化データ列の一部に主ビット列が存在するかどうかの判定結果に従って、第1の評価ビット列と第2評価ビット列を生成することによって、大幅に回路規模を縮小することが可能であることを示した。これを、再生信号の評価に適応すると、同等な評価性能を確保しつつ、評価回路の規模を大幅に縮小することが可能となる。なお、以下の説明においては、使用するPRML方式を拘束長5のPR(1,2,2,2,1)方式とする。
PR(1,2,2,2,1)方式において、第1の評価ビット列と第2評価ビット列は図2に示したように全部で54組、108個ある。合計108個の評価ビット列ごとに分布を求めるためには、対応する108個の平均値と標準偏差の演算回路が必要である。図22では評価ビット列を12個の主ビット列とその両側2ビットずつのAAおよびBBで表記する2つの副ビット列と組み合わせとしてまとめたものである。ここで、主ビット列種別番号1は「00011」,「0001100」,および「000110011」,主ビット列種別番号番号2を「00111」,「0011000」,および「1110011」,主ビット列種別番号3を「11100」, 「001100111」,「111001100」,主ビット列種別番号4を「11000」,「1100111」,および「110011000」である。2ビットの副ビット列AAは「00」、「10」、または「11」のいずれかであり、副ビット列BBは「00」、「01」、または「11」のいずれかである。前述のように、第1の評価ビット列から第2の評価ビット列を生成するには、グループごとにビット反転マスク「00100」、「0010100」、「001010100」を用いたビット列反転マスク操作を施して、主ビット列を変換したものを第2の評価ビット列とすればよい。
以上の整理法を踏まえて図22の意味を考えてみる。ここで,一般の光ディスク媒体への情報の記録の概念に従って,2値化値「1」をマーク部,「0」をスペース部(未記録部)として考えると,主ビット列種別番号が1番の評価は、主ビット列番号1番から2番への誤り確率の評価に対応し、マークの前エッジまたは2Tマークの左側(時間方向で負の側)へのシフトを表している。同様に、主ビット列種別番号が2番の評価は、主ビット列番号2番から1番への誤り確率の評価に対応し、マークの前エッジまたは2Tマークの右側(時間方向で正の側)へのシフトを表している。主ビット列種別番号が3番の評価は、主ビット列番号3番から4番への誤り確率の評価に対応し、マークの後エッジまたは2Tスペースの左側へのシフトを表している。同様に、主ビット列種別番号が4番の評価は、主ビット列番号4番から3番への誤り確率の評価に対応し、マークの後エッジまたは2Tスペースの右側へのシフトを表している。グループ番号1(=奇数)は、マークの前後エッジのシフトに係る評価である。グループ番号2(=偶数)は、マークまたはスペースのシフトに係る評価である。グループ番号3(=奇数)は、2Tマークと隣接する2Tスペースをまとめて1つのマークであると拡張して捉えれば、グループ番号1と同様にマークの前後エッジのシフトに係る評価と考えられる。以下、同様にグループ番号(=ハミング距離)が奇数の場合には、マークの前後エッジに係る評価であり、グループ番号が偶数の場合には、マークまたはスペースのシフトに係る評価であると考えられる。
光ディスク媒体に記憶される情報はピットとスペース,もしくは結晶とアモルファスのように物理的に異なる状態として保存される。このとき,種々の理由によって,記録情報の信頼性が最も高い状態が,必ずしもPRML方式の目標信号のようにレベル方向と時間方向に対称なものとはならないことは周知のことである。結果として,光ディスク媒体から得られる再生信号にはアシンメトリやエッジシフトが残留する。
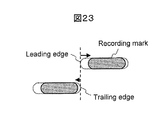
アシンメトリの発生機構についてはよく知られているので,図23を用いてエッジシフトが残留する場合について説明する。図23は,最適な記録パワーで記録されたマークのエッジ(破線)と,最適な記録パワーより低いパワーで記録されたマークのエッジ(塗りつぶし)を示した模式図である。記録パワーが不足した場合,マークの前エッジおよび後エッジはともにマークが短くなる方向にシフトする。すなわち前エッジは図中の右に,後エッジは左にシフトする。記録型光ディスクでは,集束レーザビームの照射によって記録マークを形成するため,記録パワーの変動の影響によって生じたエッジシフト量は前後エッジで異なる。これは,前エッジのシフト量は記録パワー低下の影響を直接的に受けるのに対して,後エッジのシフト量はマーク記録中の熱蓄積のために,前エッジと比較して記録パワー低下の影響を受けにくいからである。ここでは,説明の簡略のためにパワー変動に対する前後エッジの残留シフトの違いについて述べたが,実際の記録過程では,記録パルスの時間刻みがT/16やT/32のように離散的な値となるため,エッジシフトの在留は避けられない。さらに,記録材料の特性によって,例えば過大なパワーを照射するとマークの形成が不安定になり,結果としてエッジの揺らぎが増加して再生信号品質が劣化する場合もある。こうした記録材料の場合,予め記録マークを短めに形成することによって,システムの安定度が向上する。このように,記録パワーの変動,記録パルスの調整誤差の残留,記録材料の特性の違い,等に応じて実際の光ディスク媒体に記録されたマークにはエッジシフトが残留し,その量は前後エッジで異なっている。
以下,線形回折光学シミュレータにより求めた再生信号を用いて(a)SNR,(b)アシンメトリ,および(c)エッジシフト,が再生信号の品質評価に及ぼす影響について考察する。ここで,線形回折光学シミュレータの光学系条件としては波長405nm,対物レンズ開口数0.85とし,記録マークの条件としては,マーク幅0.22μm,マーク部反射率1%,スペース部反射率10%とし,検出窓幅Tに相当する長さを56nm(BD線記録密度33GB相当)とした。線形回折光学シミュレータから得られた再生信号に白色雑音を印加することで再生信号のSNRを変化させた。再生信号の処理については,アナログ信号フィルター-として,BD規格に定められるコンベンショナル・イコライザを用いて,そのブースト量を12dBとし,PRML方式としてPR(1,2,2,2,1)を用い,自動等化器として21タップのFIR(Finite Impulse Response)フィルターを用いた。
再生信号にレベル方向のオフセットがあると各々のマークの長さが変化する。そこで、ハミング距離ごとに,各々マークが大きくなる方向と小さくなる方向にグループ化して,エラータイプ別の評価をすることができる。これは,再生信号にアシンメトリがある場合に対応するものである。ここでは,エッジシフトが残留する場合については,再生信号に時間方向の位相シフトを与えることで,その影響を調べることにする。すなわちSNRの影響は白色雑音の印加にて,アシンメトリの影響はレベル方向のオフセットとして,エッジシフトの影響は時間方向の位相シフトとしてそれぞれ評価することにする。ここで,再生信号に位相シフトを与えた場合,前述の自動等化器によって,印加した位相シフトが相殺されてしまうことを防ぐために,各タップの係数は中心に対して時間方向に対称な値となるような制限を与えた。こうした制限は例えば記録パルスの調整の場合やディスクのタンジェンシャルチルトの調整の場合に有効となることを付記しておく。
以下,主ビット列のグループ番号(=ハミング距離)に応じてD値の分布の中心が異なることを避けるため,第1と第2の評価ビット列の間のユークリッド距離14,12,12で規格化した値としてD値を表記することにする。
図24はSNR,オフセット,および位相シフトがある場合について,D値の分布を計算した結果である。ここでSNRは再生信号の片側振幅と印加した白色雑音の標準偏差の比であり−22dBとした。図において,ハミング距離1の場合は「Edge」,ハミング距離2の場合は2Tが1つ含まれるので「2T(1)」,ハミング距離3の場合は2Tが2つ含まれるので「2T(2)」と表記している。図24(a)に見られるように,再生信号にオフセットも位相シフトも加えない場合には,「Edge」,「2T(1)」,および「2T(2)」はそれぞれ1つのガウス分布状に分布する。各分布の中心値が理想的な値(=1)からずれている理由は,自動等化器の残留等化誤差と考えることができる。実際には自動等化器の等化能力が有限であること,および白色雑音によって再生信号と第1の評価ビット列との間のユークリッド距離がゼロより大きな値となっていることに起因したものであって,一般の光ディスクの再生信号の分布に現れるものであるが,ここで検討したような高密度条件でない場合には無視し得る量である。この点の議論に関しては,本実施例の内容の範囲を超過するものであるため詳細な説明はしない。なお,図に示した分布は再生信号の評価時に得られる,実際の分布に近いものであることを付記しておく。
図24(b)はレベル方向のオフセットがある場合の分布である。オフセット量として再生信号の振幅に対して0.02の場合を、模式的に示した。図中の記号「LeL」は前エッジの左方向へのシフトを,「LeR」は前エッジの右方向へのシフトを,「TeL」は後エッジの左方向へのシフトを,「TeR」は後エッジの右方向へのシフトを,それぞれ表している。図に示すように,「Edge」,および「2T(2)」の分布はマークが大きくなる方向(LeLとTeR)と小さくなる方向(LeRとTeL)の2つの分布にスプリットすることが判る。一方,「2T(1)」の分布はスプリットせずに1つ分布のままである。これは図22に示したようにハミング距離2に含まれる4つのグループがそれぞれ2Tマークと2Tスペースが左右にシフトした場合について評価するものであって,マークやスペースの大きさの変化を評価するものでないことに起因している。SbER方式においては、分布は6つ形成されるが、本実施例の方式ではそうはなっていないことが判る。
図24(c)は時間方向の位相シフトがある場合の分布である。位相シフト量として検出窓幅Tの10%の場合を示した。図中の記号「−L」は左方向へのシフトを,「−R」は右方向へのシフトを,それぞれ表している。図に示すように,「Edge」,「2T(1)」,および「2T(2)」の3つは共に,それぞれ「−L」と「−R」の2つの分布にスプリットすることが判る。ここに得られた6つの分布は,図24(b)に得られた分布とグループ化条件が異なることに注意を要する。
以下,SNR,オフセット,および位相シフトがある場合について,シミュレーションによって求めた実際のビットエラー率とSbERの相関関係について調べる。グループ化条件としては,以下の4つについて比較する。
(1)全108評価ビット列独立
108(36×3)個の評価ビット列のそれぞれについて独立にSbERを算出し,それらの加算値として合計のSbERを求めるものである。回路規模は大きいがビットエラー率とSbERの相関には最も優れていると考えられる。
図25にシミュレーションの結果を示す。図に見られるように,(a)SNR,(b)オフセット,(c)位相シフトの全てに対して,ビットエラー率とSbERは良好な相関をもっていることが判る。
(2)マークの大きさ変化に依存した6評価ビット列独立
前述のように,マークが大きくなるグループとマークが小さくなるグループに分けて,ハミング距離当たり2つ,合計6つのグループ化を行なうものである。回路規模は全評価ビット列を独立に扱う場合の1/18に削減される。
図26にシミュレーションの結果を示す。図に見られるように,(a)SNR,(b)オフセットに関しては,ビットエラー率とSbERは良好な相関をもっていることが判るが,(c)位相シフトに関しては,SbERが最大1000倍程度の誤差をもってしまうことが判る。この理由は,図24(c)の結果を反映したものであり,マークの大きさに着目したグループ化は,位相シフトによってスプリットした2つの分布を1つにまとめて平均と標準偏差を求めることに依存したものである。この方法は回路規模の簡略化のためには非常に有効な方法であるが,位相シフト(残留エッジシフトに対応)がある場合に,再生信号の品質の評価を行なうとビットエラー率とSbERの誤差が大きくなってしまう。
(3)54評価ビット列独立
評価ビット列のグループ化手法として,第1の評価ビット列から第2の評価ビット列への評価と,その逆の評価をまとめて扱う方法が考えられる。これらは評価ビット列の相関が強いため,良好な評価値が得られると考えられるからである。回路規模は全評価ビット列を独立に扱う場合の1/2に削減される。
図27にシミュレーションの結果を示す。図に見られるように,予想に反して,(a)SNR,(b)オフセット,(c)位相シフトの全てに対して,ビットエラー率とSbERは良好な相関をもっていることが判る。この理由は図22に示したように,第1の評価ビット列と第2の評価ビット列との間の誤りはエッジあるいはマークが左右にシフトすることに対応するため,これらをグループ化した場合にオフセットや位相シフトに対してスプリットした分布を1つの分布として平均と標準偏差を算出してしまうためである。
(4)主ビット列に応じた12グループ独立
これは本実施例のグループ化方法の主眼であり,図22に整理した内容に基づいて,ハミング距離ごとの4つの主ビット列に対応して合計12のグループに分けて独立にSbERを算出する方法である。図24に示したように,オフセットと位相シフト(アシンメトリと残留エッジシフトに対応)に対して,対応可能なものである。回路規模は全評価ビット列を独立に扱う場合の1/9に削減される。本実施例の主ビット列に着目したこのグループ化方法は(a)SNR,(b)オフセット,(c)位相シフトの全てに対して,ビットエラー率とSbERは良好な相関を持つことが期待される。
図28にシミュレーションの結果を示す。図に見られるように,(a)SNR,(b)オフセット,(c)位相シフトの全てに対して,ビットエラー率とSbERは良好な相関を持つことが確認された。回路規模を1/9に削減したにもかかわらず,108個の全ての評価ビット列を独立に計算した場合と同等の相関性能が得られることが判る。
本実施例による再生信号の評価方法について,さらに詳しく述べる。
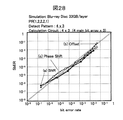
前述の説明では,ハミング距離が1,2,3の場合,すなわち評価ビット列に含まれる2Tの数が0,1,2の場合について本実施例の効果を述べた。一方,BDフォーマットを含めて変調符号の中で連続する2Tの数は制限されているものの,概ね6個程度まで2Tが連続する場合がある。従って,優れた再生信号の評価方法を提供する意味で,連続する2Tの数を何個まで評価することが妥当であるのかを明らかにしておく必要がある。
図29はSNRとSbERの関係をまとめたシミュレーション結果である。シミュレーションの条件は前述の通りであり,評価ビット列に含まれる2Tの連続数0,1,2,3,4,5,6について計算を実施した。図中のSbER値の算出過程では,主ビット列によるグループ化は行なわず,全ての(36×6個)の評価ビット列について独立にSbERを算出した合計値を求めた。結果は図に見られるように,2Tの連続数が2以上で,SbER値は一定値に漸近することが判った。したがって,2Tの連続数は2個まで評価することは,再生信号の評価性能と実現するための回路規模のバランスから優れていると言える。
このシミュレーションを実施するのに際しては,図30の評価ビット列を用いた。これは図22の評価ビット列テーブルを2T連続数6個まで拡張したものである。本実施例に従って,再生信号の評価する場合,再生性能を重視する場合には,図30の評価ビット列テーブルを用いて,2T連続数3,4,5,6,すなわちハミング距離4,5,6,7についても評価をすることができる。
前述のようにSNR,オフセット,および位相シフトに対して,ビットエラー率とSbERの関係を計算し,用いる評価ビット列に含まれる2T連続数との関係を調べた結果を図31に示す。ここでは,前述と同様にSbER算出のグループ化に関して4つの方法を比較した結果を示している。図に見られるように,(1)全評価ビット列独立計算,の場合と(4)主ビット列に基づく4グループ化の場合,ビットエラー率とSbERの誤差は評価する評価ビット列に含まれる2Tの連続数の増加に応じて減少することが判る。また,2Tの連続数は2個まで評価することは,再生信号の評価性能と実現するための回路規模のバランスから優れていることも判る。
本実施例の評価ビット列判別方法については,図11を用いて説明したとおりである。前述の説明では,最短ラン長2Tに対応したPRML方式によって生成された2値化信号はラン長制限が自動的に満たされたものとなると述べた。再生信号の品質を評価する一般のケースでは,この前提は正しい。しかしながら,光ディスク媒体上の欠陥を含んで再生信号を評価するような場合,PRML回路のパスメモリ長に応じて,パスマージが完了しないことが考えられる。この場合,2値化信号には1Tが含まれることがあり,主ビット列が一致しても,両端の副ビット列を含めるとラン長制限を満たさないことになる。SbER算出回路の実装形態によっては,動作不良を生じる原因となる場合がある。このような場合,生成された第1の評価ビット列と第2の評価ビット列がラン長制限規則に従うかどうかを検査して,これがラン長制限を満たさない場合には,SbER算出回路へのデータ転送を行なわないようにすればよい。これを実現する最も簡単な方法を図21に示す。2ビットの副ビット列に隣接する1ビットの主ビット列を含む3ビットに着目して,これが「010」または「101」に一致した場合に,ラン長制限を満足しないと判定すればよい。前述のように副ビット列はハミング距離に依存しないものであるから,こうした判定回路は最低1つ追加実装すればよい。回路の実装形態によって,複数の評価ビット列の評価を並列に実施するようなケースでは必要な分だけ,「010」または「101」判定回路を設ければよい。
次に,本実施例のSbER算出におけるグループ化について,前述の説明と別の実施形態を説明する。
図32は図22に対して,左シフトと右シフトについてグループ化した場合の評価ビット列テーブルである。前述のように,主ビット列に対してその意味を踏まえて左シフトと右シフトに分類するとグループ数は全部で6となる。図33はビットエラー率とSbERの関係を示すシミュレーション結果である。(b)オフセットがある場合に誤差が大きいが,全体としてビットエラー率とSbERの関係は比較的に良好なことが判る。
図34は図22に対して,前エッジと後エッジについてグループ化した場合の評価ビット列テーブルである。同様にグループ数は全部で6となる。図35はビットエラー率とSbERの関係を示すシミュレーション結果である。(c)位相シフトの場合に誤差が大きいが,全体としてビットエラー率とSbERの関係は比較的に良好なことが判る。
図36は図22に対して,マークが大きくなる方向と小さくなる方向に着目してグループ化した場合の評価ビット列テーブルである。シミュレーション結果は図26に示した。
以上のように,図22に従って,主ビット列とその誤りを評価する意味に着目すると,ハミング距離当たり2つのグループへの3つ分類方法が3通り可能である。例えば,ドライブ装置において,回路オフセットの調整学習処理を実施するような場合に,SbERを指標として,これを最小にするような処理を実施する場合,オフセットの変化に対して敏感な指標を使うことが望ましく,図32に示したグループ化を行なうことが有効である。同様に,同様に,記録ストラテジを調整するような場合,位相シフトに敏感な図34や図36の分類法を用いることが好ましい。こうした場合,これらに対応した回路を実装する必要はなく,図22に示したハミング距離当たり4つのグループに分類したSbERの算出結果を用いて,これら3通りのSbER値を近似的に求めることが可能である。例えば,任意の2つの主ビット列に対して平均値および標準偏差がそれぞれ,a1,a2およびσ1,σ2として算出された場合,これらをグループ化した場合の平均値aと標準偏差σはガウス分布の合成に従って,次式で近似的に求めることができる。
以上のように,本実施例によってハミング距離当たり4つの主ビット列にグループ化して,D値の平均と分散を求める方法によって,全ての結果を加算することによって,精度の高いSbER値を算出することも,学習処理等の場合に任意の2つの主ビット列についての合成した平均値と標準偏差を(式1)に従って求めて用いることも可能である。なお,説明の簡略化のため(式1)では,2つの分布の計測イベント数が実質的に等しい場合について示したが,これらのイベント数に配慮して合成分布の平均値と標準偏差を求めることはガウス分布の合成として周知な事柄である。
次に本実施例の評価方法によって,実際の光ディスクに33GB容量相当の密度でデータを記録再生した場合の結果について説明する。ここでは,媒体として合金系記録膜を有する3層ディスクを用い,シバソク製LM330A BD対応評価装置を用いて実験を行なった。記録再生の速度はBD2倍速である。
図37にビットエラー率とSbERの関係を表す実験結果を示す。ここではクロストークの影響を含むように連続5トラックの記録を行ない中心のトラックにて,種々のストレスを与えて実験を行なった。具体的なストレスはディスクのラジアルチルト(R−tilt),タンジェンシャルチルト(T−tilt),フォーカスずれ(AF),光ヘッドのビームエキスパンダの操作による球面収差(SA),記録パワーの変化(Pw),およびラジアルチルトに関しては,記録ストラテジによって2Tマークの残留シフトが大きい場合(R−tilt(2T Shift))である。主ビット列によるグループ化は図22に示した4分類である。図に見られるように,ビットエラー率とSbERは良好に一致しており,本方法による再生信号の評価の性能が必要十分であることが検証された。ここで,ビットエラー率が10―5付近において,バラツキが大きい原因は主に媒体の欠陥の影響である。
図38は,図32の評価ビット列テーブルに従って,シフト方向に関する2分類を実施した場合の実験結果である。図37の結果に比較して若干誤差が大きくなっているが,ビットエラー率とSbERの相関は良好である。
図39は,図34の評価ビット列テーブルに従って,前後のエッジに関する2分類を実施した場合の実験結果である。同様に,図37の結果に比較して若干誤差が大きくなっているが,ビットエラー率とSbERの相関は良好である。
本実施例の評価方法によって,ハミング距離ごとに4個ずつ得られた分布の平均値と標準偏差の値から,合成したガウス分布のσ値を求めることができる。図40はビットエラー率と合成した分布のσ値の関係を示す実験結果である。これもビットエラーとの相関が高い指標の1つとして利用することができる。
図41はフォーカスオフセット量と本実施例によってもとめたSbERの関係を示す実験結果である。こうした関係を利用して,SbERを最小にするようにすれば,適正なフォーカスオフセット値の学習処理を実現することができる。同じ方法は,ラジアルチルトやタンジェンシャルチルト,球面収差,記録パワー等,種々の学習処理に応用することができる。
次に,本実施例の再生信号の評価方法の全体的な流れを,図43に示したフローチャートを用いて説明する。まず,PRMLデコーダから出力された2値化信号と主ビット列を比較する(S201)。2値化信号にいずれかの主ビット列が含まれるかどうかを判定し(S202),含まれない場合(No),S201に戻り処理を継続し,含まれる場合(Yes),図11に説明した処理を実施して,第1の評価ビット列と第2の評価ビット列を生成する(S203)。次に,第1の評価ビット列と第2の評価ビット列の目標信号と等化された再生信号との間のユークリッド距離を算出し,両者の差であるD値を求める(S204)。ここで得られたD値は判別した主ビット列に応じて蓄えられ,平均値と標準偏差が演算される(S205)。所定のデータ量の取得が終了したかどうかを判定し(S206),終了していない場合(No),S201に戻り処理を継続し,終了した場合(Yes),S205で主ビット列ごとに算出されたD値の平均値と標準偏差を合成して再生信号の評価値を算出する(S207)。
以下,本実施例の光ディスク装置の全体構成例を説明する。
図1は本実施例の光ディスク装置を実現するための再生信号評価回路の構成を示す実施例である。図において,光ディスク媒体から再生され,図示しないアナログフィルター処理を施された再生信号51はA/D変換器21によって6から8ビットのデジタルデータに変換され,自動等化器22によって等化されたのちPRMLデコーダ23によって2値化され,2値化信号52が出力される。本実施例の再生信号品質の評価回路30は主ビット判別回路31,評価ビット列生成回路32,ユークリッド距離計算回路33,グループ別D値メモリ34,および評価値集計回路35によって構成される。主ビット列判別回路31には,主ビット列のデータが格納されており,2値化信号52に主ビット列が含まれるかどうかを判定する。2値化信号52に主ビット列が含まれる場合,評価ビット列生成回路32は図11に説明した処理を実施して,第1の評価ビット列と第2の評価ビット列を生成する。ユークリッド距離計算回路33では,第1の評価ビット列と第2の評価ビット列の目標信号と自動等化器22から出力される等化再生信号53との間のユークリッド距離を算出し,両者の差であるD値を求める。ここで得られたD値はグループ別D値メモリ34に送られ,主ビット判別回路31で判別した主ビット列に応じて蓄えられ,平均値と標準偏差が演算される。評価値集計回路35ではこれらの結果を合成して再生信号の評価結果を算出し,指示に従ってCPU140に結果を転送する。評価結果の例としては,SbER等を用いることができる。CPU140では,例えばフォーカスオフセットを変化させながら,再生信号の品質を評価して,これが最良になるようにフォーカスオフセット学習処理等を実施する。こうした構成によって,本実施例の再生信号の評価方法を実施する回路を作製することができる。
最後に本実施例を実施するのに好適な光ディスク装置の構成について述べる。図42は,本実施例の再生信号の評価方法を搭載した光ディスク装置の構成例を示す模式図である。置に装着された光ディスク媒体100は,スピンドルモータ160により回転される。再生時には,CPU140によって指令された光強度になるようにレーザパワー/パルス制御器120が光ヘッド110内のレーザドライバ116を介して半導体レーザ112に流す電流を制御し,レーザ光114を発生させる。レーザ光114は対物レンズ111によって集光され,光スポット101を光ディスク媒体100上に形成する。この光スポット101からの反射光115は対物レンズ111を介して,光検出器113で検出される。光検出器は複数に分割された光検出素子から構成されている。再生信号処理回路130は,光ヘッド110で検出された信号を用いて,光ディスク媒体100上に記録された情報を再生する。本実施例は図1に示した回路ブロックとして再生信号処理回路130に内蔵される。こうした構成によって,本実施例の光ディスク装置は,30GB以上のBDを実現する装置として,再生信号の評価とこれを用いた種々の学習処理機能を実装することができる。