JP4875652B2 - 行動認識システム及びその方法 - Google Patents
行動認識システム及びその方法 Download PDFInfo
- Publication number
- JP4875652B2 JP4875652B2 JP2008093742A JP2008093742A JP4875652B2 JP 4875652 B2 JP4875652 B2 JP 4875652B2 JP 2008093742 A JP2008093742 A JP 2008093742A JP 2008093742 A JP2008093742 A JP 2008093742A JP 4875652 B2 JP4875652 B2 JP 4875652B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- image
- target person
- person
- recognition system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 32
- 230000006399 behavior Effects 0.000 claims description 27
- 238000011161 development Methods 0.000 claims description 20
- 238000001514 detection method Methods 0.000 claims description 18
- 238000005259 measurement Methods 0.000 claims description 18
- 238000003384 imaging method Methods 0.000 claims description 17
- 230000008921 facial expression Effects 0.000 claims description 3
- 230000010365 information processing Effects 0.000 description 26
- 238000010586 diagram Methods 0.000 description 10
- 230000006870 function Effects 0.000 description 8
- 238000012545 processing Methods 0.000 description 7
- 239000000284 extract Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images













Landscapes
- Studio Devices (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Description
このように、特定の人物に対してロボットがサービスを行う場合、その対象となる人物を特定し、その人物の行動を認識する必要がある。
例えば、特許文献1には、移動ロボットが備える視覚カメラ等で撮影した人物の画像を用いて、人物の行動を認識する技術が提案されている。具体的には、特許文献1には、人物の動画像を取得し、その動画像から人物の手や頭の動作パターンを抽出し、その動作パターンから人物の行動を認識する技術が開示されている。
本発明は、全方位の距離を取得する全方位距離取得手段と、所定空間の撮影画像を取得する撮像手段と、前記全方位距離取得手段によって取得された距離情報を空間上の座標に展開して空間展開図を作成し、該空間展開図において特定した撮影範囲内に存在する距離計測点の各々と前記撮像手段との距離を算出し、前記撮影画像の各位置と前記空間展開図における各計測点との対応をとるとともに、算出した各計測点の距離を用いることにより、前記所定空間の距離画像を生成する距離画像生成手段と、前記距離画像生成手段によって生成された前記距離画像の距離情報に基づいて対象人物を特定する第1特定手段と、前記撮影画像において、前記第1特定手段によって特定された対象人物に対応する人物を対象人物として特定する第2特定手段と、前記撮像手段によって連続的に取得される前記対象人物の撮影画像を用いて、前記対象人物の行動を認識する行動認識手段とを具備する行動認識システムを提供する。
続いて、生成された距離画像において距離情報に基づき対象人物が第1特定手段により特定され、この対象人物に対応する撮影画像上の人物が対象人物として第2特定手段により特定される。そして、このように撮影画像上において対象人物が特定された後は、この対象人物の撮影画像が連続的に取得され、この連続画像を用いて行動認識手段により該対象人物の行動認識が行われる。
なお、距離画像は、全方位距離取得手段によって取得された距離情報を空間上の座標に展開して空間展開図を作成し、該空間展開図において特定した撮影範囲内に存在する距離計測点の各々と前記撮像手段との距離を算出し、前記撮影画像の各位置と前記空間展開図における各計測点との対応をとるとともに、算出した各計測点の距離を用いることにより、生成される。
このように、本発明の行動認識システムによれば、距離画像を用いて対象人物を特定するので、例えば、撮影画像からは判別できなかった奥行方向に配置されている人物の切り分けを容易に行うことが可能となる。これにより、行動認識を行う場合において、背後にいる人物や移動体の動きを排除して、対象人物の行動パターンのみを抽出でき、この結果、対象人物の行動認識を高い精度で行うことができる。
例えば、笑っている人物を対象人物としたい場合には、口の周りの動きが大きい人物を選定すればよい。
以下、本発明に係る行動認識システム及びその方法の一実施形態について、図面を参照して説明する。
図1は、本発明の第1の実施形態に係る行動認識システムの概略構成を示す図である。本実施形態に係る行動認識システムは、所定の空間を含む第1撮影空間の距離画像を取得する距離画像カメラ(距離画像取得手段)1と、所定の空間を含む第2撮影空間の撮影画像を取得するカメラ(撮像手段)2と、距離画像カメラ1から距離画像を取得するとともに、カメラ2から撮影画像を取得し、これらの画像から対象人物を特定し、更に特定した対象人物の行動認識を行う情報処理装置3とを備えている。
Memory)、ROM(Read Only Memory)、HDD(Hard Disk
Drive)等を備えており、ROM等の記憶装置に格納されている各種プログラムをCPUがRAMに読み出し、実行することにより種々の処理を実現させる。
まず、距離画像カメラ1及びカメラ2が同時に作動することにより、同時期における同一の空間の距離画像と撮影画像とが取得される(図3のステップSA1)。
情報処理装置3の第1特定部31は、入力された距離画像において、予め設定されている所定距離(例えば、1.5m)に存在する人物を対象人物として特定する(図3のステップSA2)。ここで、予め設定されている所定距離とは、ユーザが任意に設定可能な値である。例えば、展覧会やイベント会場などで、所定の展示物の前に立っている人を対象人物として特定したい場合には、距離画像カメラ1と該展示物との距離を予め計測しておき、この距離を所定距離として登録することが考えられる。
ここで、2値画像作成部32によって作成される2値画像を図6に示す。ここでは、図4に示された距離画像において、右端の人物が対象人物であると第1特定部31によって特定された場合の2値画像を示している。
これにより、撮影画像上において対象人物が特定されることとなる。このようにして、対象人物が撮影画像上において特定されると、行動認識部34は、連続的にカメラ2によって取得される撮影画像を用いて、対象人物の動作パターンを分析し、この動作パターンから行動認識を行う(図3のステップSA5)。
次に、本発明の第2の実施形態に係る行動認識システム及びその方法について説明する。以下、本実施形態の行動認識システムについて、第1の実施形態と共通する点については説明を省略し、異なる点について主に説明する。
このような構成を備える行動認識システムにおいては、上述した第1の実施形態に係る行動認識システムと同様に、距離画像カメラ1及びカメラ2により距離画像及び撮影画像がそれぞれ取得され、情報処理装置3aに入力される。情報処理装置3aの顔検出部35は、撮影画像において顔検出を行い、その結果を第1特定部31aに出力する。
一般に、手、足、胴体等の体の各部は、頭を中心として厚み±30cm以内に収まると考えられる。従って、第1特定部31aが顔から前後30cmの範囲に存在する物体を顔検出部35によって検出された顔と同一人物に属するものであると判断し、これらの物体を対象人物として特定する。その後の処理は、上述した第1の実施形態と同様である。
また、顔は手や足などと比較して、他の人物と重なることが少ないため、顔に基づいて人物を特定することで、対象人物以外の人物との切り分けを容易に且つ確実に行うことが可能となる。
このようにすることで、複数の顔が検出された場合でもそのうちの一つを選択することができるので、対象人物を特定することが可能となる。
次に、本発明の第3の実施形態に係る行動認識システム及びその方法について説明する。本実施形態に係る行動認識システムは、例えば、どの人物を対象人物にするかが予め決められているにもかかわらず、距離画像カメラ1とその人物との距離が不明であるために、距離画像カメラにおいて取得された距離画像において、対象人物を特定できない場合に、有効に機能する。
以下、本実施形態の行動認識システムについて、第1の実施形態と共通する点については説明を省略し、異なる点について主に説明する。
情報処理装置3の第1特定部31は、距離画像において、カメラ6によって計測された距離に存在する人物を対象人物として特定する。その後の処理は、上述した第1の実施形態と同様である。
次に、本発明の第4の実施形態に係る行動認識システム及びその方法について説明する。
例えば、展覧会やイベント会場などで、所定の展示物の前に立っている人を対象人物として特定したい場合がある。このような場合に、その対象人物までの距離が不確定であるため、距離画像において対象人物を特定することができないということが考えられる。本実施形態に係る行動認識システム及びその方法は、このように、予め決められている所定のエリア付近にいる人物を対象人物として特定する場合に、有効に機能する。
以下、本実施形態の行動認識システムについて、第1の実施形態と共通する点については説明を省略し、異なる点について主に説明する。
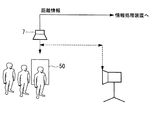
例えば、所定の展示物50の近傍に存在する人物を対象人物として特定したい場合には、カメラ7は展示物の周辺の人を観察できる位置に配置されるとともに、距離画像カメラ1と対象人物との距離を計測するできる場所、例えば、展示物50付近の天井に設置される。
情報処理装置3の第1特定部31は、距離画像において、カメラ7によって計測された距離に存在する人物を対象人物として特定する。その後の処理は、上述した第1の実施形態と同様である。
次に、本発明の第5の実施形態に係る行動認識システム及びその方法について説明する。上述した各実施形態においては、距離画像を取得する距離画像カメラ1を備え、この距離画像カメラ1によって取得された距離画像を用いて、その距離情報から対象人物を特定していた。これに対し、本実施形態に係る行動認識システムは、図11に示されるように、360度方位(全方位)の距離情報を取得可能な全方位距離センサ21によって取得された距離情報と、所定空間の撮影画像を取得するカメラ2とによって取得された撮影画像を用いて、距離画像を作成する点で、上述した各実施形態にかかる行動認識システムと異なる。
図11は、本実施形態に係る行動認識システムの概略構成を示した図である。図11に示すように、本実施形態に係る行動認識システムは、360度方位の距離情報を取得する全方位距離センサ(距離取得手段)21と、所定の空間の撮影画像を取得するカメラ2と、距離センサ21から360度方位における距離情報を取得するとともに、カメラ2から撮影画像を取得し、これらの距離情報及び撮影画像から距離画像を作成し、更に、この距離画像と撮影画像とを用いて対象人物を特定し、特定した対象人物の行動認識を行う情報処理装置23とを備えている。
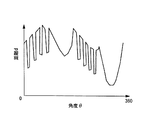
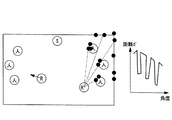
まず、全方位距離センサ21により360度方位の距離dが計測され、角度θと距離dとが対応付けられた距離情報が情報処理装置23に送信される(図12のステップSB1)。また、カメラ2により所定の撮影空間の撮影画像が取得され、取得された撮影画像が情報処理装置23に送信される(図12のステップSB2)。ここで、カメラ2の撮影範囲の情報については、カメラ2の位置・向き(方位)等に基づいて予め算出され、この情報が情報処理装置23に登録されているものとする。
続いて、図15に示されるように、空間展開図において特定した撮影範囲内に存在する距離計測点の各々とカメラとの距離d´を算出する(ステップSB5)。
また、上記各実施形態で説明した各機能は、可能な範囲で組み合わせ可能である。
2、6,7 カメラ
3,3a,23 情報処理装置
21 全方位距離センサ
31 第1特定部
32 2値画像作成部
33 第2特定部
34 行動認識部
35 顔検出部
Claims (5)
- 全方位の距離を取得する全方位距離取得手段と、
所定空間の撮影画像を取得する撮像手段と、
前記全方位距離取得手段によって取得された距離情報を空間上の座標に展開して空間展開図を作成し、該空間展開図において特定した撮影範囲内に存在する距離計測点の各々と前記撮像手段との距離を算出し、前記撮影画像の各位置と前記空間展開図における各計測点との対応をとるとともに、算出した各計測点の距離を用いることにより、前記所定空間の距離画像を生成する距離画像生成手段と、
前記距離画像生成手段によって生成された前記距離画像の距離情報に基づいて対象人物を特定する第1特定手段と、
前記撮影画像において、前記第1特定手段によって特定された対象人物に対応する人物を対象人物として特定する第2特定手段と、
前記撮像手段によって連続的に取得される前記対象人物の撮影画像を用いて、前記対象人物の行動を認識する行動認識手段と
を具備する行動認識システム。 - 前記第1特定手段は、前記距離画像において、予め設定されている所定距離に存在する人物を前記対象人物として特定する請求項1に記載の行動認識システム。
- 前記撮影画像において、顔検出を行う顔検出手段を備え、
前記第1特定手段は、前記距離画像において、前記顔検出手段によって検出された顔の位置から所定距離内の領域に存在する物体を前記対象人物として特定する請求項1または請求項2に記載の行動認識システム。 - 前記顔検出手段は、複数の顔が検出された場合に顔の表情の変化を検出し、この変化に基づいていずれか一つの顔を選択する請求項3に記載の行動認識システム。
- 360度方位の距離を取得する過程と、
撮像手段を用いて所定空間の撮影画像を取得する過程と、
360度方位の距離情報を空間上の座標に展開して空間展開図を作成し、該空間展開図において特定した撮影範囲内に存在する距離計測点の各々と前記撮像手段との距離を算出し、前記撮影画像の各位置と前記空間展開図における各計測点との対応をとるとともに、算出した各計測点の距離を用いることにより、前記所定空間の距離画像を生成する過程と、
前記距離画像の距離情報に基づいて、対象人物を特定する過程と、
前記撮影画像において、前記距離画像上で特定された対象人物に対応する人物を対象人物として特定する過程と、
前記対象人物の撮影画像を連続的に取得し、取得した連続撮影画像を用いて前記対象人物の行動を認識する過程と
を有する行動認識方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008093742A JP4875652B2 (ja) | 2008-03-31 | 2008-03-31 | 行動認識システム及びその方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008093742A JP4875652B2 (ja) | 2008-03-31 | 2008-03-31 | 行動認識システム及びその方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009245363A JP2009245363A (ja) | 2009-10-22 |
| JP4875652B2 true JP4875652B2 (ja) | 2012-02-15 |
Family
ID=41307137
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008093742A Active JP4875652B2 (ja) | 2008-03-31 | 2008-03-31 | 行動認識システム及びその方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4875652B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5306500B2 (ja) * | 2012-02-29 | 2013-10-02 | 株式会社東芝 | 画像処理装置、画像処理方法及びプログラム |
| KR101411928B1 (ko) * | 2012-04-03 | 2014-07-04 | 모젼스랩(주) | 모션인식장치를 이용한 모바일 단말기와 전시디바이스 간 동기화 방법 |
| KR101371309B1 (ko) * | 2012-04-03 | 2014-03-10 | 모젼스랩(주) | 실내 측위 좌표를 이용한 모바일 단말기와 전시디바이스 간 동기화 방법 |
| KR101560673B1 (ko) * | 2013-02-06 | 2015-10-16 | 삼성에스디에스 주식회사 | 모션 매칭을 이용하는 컨텐츠 동기화 서버 및 컨텐츠 동기화 방법 |
| JP2015114292A (ja) * | 2013-12-16 | 2015-06-22 | 川崎重工業株式会社 | ワークの位置情報特定装置および方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4644992B2 (ja) * | 2001-08-10 | 2011-03-09 | パナソニック電工株式会社 | 距離画像を用いた人体検知方法 |
| JP3952460B2 (ja) * | 2002-11-19 | 2007-08-01 | 本田技研工業株式会社 | 移動物体検出装置、移動物体検出方法及び移動物体検出プログラム |
| JP2005215927A (ja) * | 2004-01-29 | 2005-08-11 | Mitsubishi Heavy Ind Ltd | 行動認識システム |
| JP2007257088A (ja) * | 2006-03-20 | 2007-10-04 | Univ Of Electro-Communications | ロボット装置及びそのコミュニケーション方法 |
| JP4689560B2 (ja) * | 2006-09-01 | 2011-05-25 | 株式会社ソフイア | 遊技設備 |
-
2008
- 2008-03-31 JP JP2008093742A patent/JP4875652B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009245363A (ja) | 2009-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6650677B2 (ja) | 映像処理装置、映像処理方法、およびプログラム | |
| JP6125188B2 (ja) | 映像処理方法及び装置 | |
| JP6352208B2 (ja) | 三次元モデル処理装置およびカメラ校正システム | |
| JP6588413B2 (ja) | 監視装置および監視方法 | |
| CN102369549B (zh) | 用于估计物体位置的信息创建设备、用于估计物体位置的信息创建方法 | |
| JP6189170B2 (ja) | 姿勢推定装置 | |
| JP4875652B2 (ja) | 行動認識システム及びその方法 | |
| JP2012059030A (ja) | 距離画像カメラを用いた人体識別方法および人体識別装置 | |
| JP2019164842A (ja) | 人体行動分析方法、人体行動分析装置、機器及びコンピュータ可読記憶媒体 | |
| CN104284084A (zh) | 图像处理设备、图像处理方法以及程序 | |
| JP5700221B2 (ja) | マーカ判定装置、マーカ判定検出システム、マーカ判定検出装置、マーカ、マーカ判定方法及びそのプログラム | |
| JP2012146132A (ja) | 3次元データと2次元データの統合方法及びこれを用いた見守りシステム、監視システム | |
| KR101802918B1 (ko) | 3차원 영상 획득 장치 및 그 동작방법 | |
| JP2013156671A (ja) | 画像監視装置 | |
| KR101311728B1 (ko) | 침입자의 얼굴감지 시스템 및 그 방법 | |
| KR102710645B1 (ko) | 객체 썸네일 처리장치 및 그 장치의 구동방법 | |
| JP2006236184A (ja) | 画像処理による人体検知方法 | |
| JP2010199713A (ja) | オブジェクト検出装置及びオブジェクト検出方法 | |
| JP6763154B2 (ja) | 画像処理プログラム、画像処理装置、画像処理システム、及び画像処理方法 | |
| JP7500333B2 (ja) | 生成装置、生成方法、およびプログラム | |
| JP7554245B2 (ja) | 人物追跡方法及び人物追跡装置 | |
| JP7048347B2 (ja) | 位置関係決定装置 | |
| JP7647122B2 (ja) | 人物監視システム、人物監視方法および人物監視処理プログラム。 | |
| JP6226827B2 (ja) | 監視映像表示装置及び監視映像表示方法 | |
| US20250148690A1 (en) | Information processing method, information processing device, and non-transitory computer readable recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110805 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110816 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111017 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111108 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111125 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4875652 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |