JP4859751B2 - Rotating electric machine - Google Patents
Rotating electric machine Download PDFInfo
- Publication number
- JP4859751B2 JP4859751B2 JP2007129639A JP2007129639A JP4859751B2 JP 4859751 B2 JP4859751 B2 JP 4859751B2 JP 2007129639 A JP2007129639 A JP 2007129639A JP 2007129639 A JP2007129639 A JP 2007129639A JP 4859751 B2 JP4859751 B2 JP 4859751B2
- Authority
- JP
- Japan
- Prior art keywords
- induction magnetic
- rotor
- magnetic poles
- induction
- permanent magnets
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
Description
本発明は、軸線まわりに回転する籠状に形成されて外周部に複数の誘導磁極を支持するロータを備えた回転電機に関する。 The present invention relates to a rotating electrical machine including a rotor that is formed in a bowl shape that rotates around an axis and supports a plurality of induction magnetic poles on an outer peripheral portion.
複数の電機子を有して回転磁界を発生する環状のステータをケーシングに固定し、外周に複数の永久磁石を支持する第1ロータをステータの内部に回転自在に支持し、複数の軟磁性体製の誘導磁極を支持する円筒状の第2ロータを前記ステータおよび前記第1ロータ間に回転自在に支持することで、第1ロータおよび第2ロータから別個に出力を取り出すことを可能とした二軸出力型電動機が、下記特許文献1により公知である。
ところで、上記特許文献1に記載された二軸出力型電動機の第2ロータは、相互に対向するように配置された2枚の円板状の第1、第2ロータフレームの外周部から軸線方向に複数の誘導磁極支持部を一体的に突出させ、第1ロータフレームの誘導磁極支持部の先端と第2ロータフレームの誘導磁極支持部の先端との間に誘導磁極を挟んでボルトで固定する構造になっている。このため、第1、第2ロータフレームの形状が複雑化してしまい、量産性が低下してコストアップの要因となる問題があるだけでなく、その第2ロータは2枚のロータフレームと複数の誘導磁極支持部の両端との連結部が絶縁されていないため、運転時に発生する渦電流が一方のロータフレーム、固定部材、他方のロータフレームおよび固定部材で構成される閉回路を流れることで、大きな発熱やエネルギー損失が発生する可能性があった。
By the way, the second rotor of the two-shaft output motor described in
本発明は前述の事情に鑑みてなされたもので、回転電機のロータに発生する渦電流を最小限に抑えて発熱およびエネルギー損失を低減するとともに、ロータの量産性を向上させてコストダウンを図ることを目的とする。 The present invention has been made in view of the above circumstances, and minimizes eddy currents generated in a rotor of a rotating electrical machine to reduce heat generation and energy loss, and improve mass productivity of the rotor to reduce costs. For the purpose.
上記目的を達成するために、請求項1に記載された発明によれば、円周方向に配置された複数の電気子を有するステータと、円周方向に配置された複数の軟磁性体製の誘導磁極を有する第1ロータと、円周方向に配置された複数の永久磁石を有する第2ロータとを径方向に順番に配置し、前記第1ロータは、共通の軸線まわりに回転可能に配置された第1フランジ部材および第2フランジ部材の外周部間を非導電性材料で構成した円筒部材で連結し、前記円筒部材に軟磁性体よりなる誘導磁極を前記軸線を中心とする周方向に所定間隔で支持して構成されることを特徴とする回転電機が提案される。
To achieve the above object, according to the invention described in
また請求項2に記載された発明によれば、請求項1の構成に加えて、前記円筒部材は樹脂製であり、前記誘導磁極は前記円筒部材の成形時に該円筒部材に一体化されることを特徴とする回転電機が提案される。
According to the invention described in
また請求項3に記載された発明によれば、請求項1または請求項2の構成に加えて、前記誘導磁極は前記円筒部材の外周面に露出することを特徴とする回転電機が提案される。
According to the invention described in claim 3, in addition to the configuration of
また請求項4に記載された発明によれば、請求項1または請求項2の構成に加えて、前記誘導磁極は前記円筒部材の内周面に露出することを特徴とする回転電機が提案される。
According to the invention described in
また請求項5に記載された発明によれば、請求項1〜請求項4の何れか1項の構成に加えて、前記円筒部材は、前記第1、第2フランジ部材に固定される一対の環状の固定部と、前記軸線を中心とする周方向に所定間隔で配置されて前記一対の固定部を連結する複数の棒状の誘導磁極支持部とで構成され、隣接する誘導磁極支持部間に前記誘導磁極が支持されることを特徴とする回転電機が提案される。
According to the invention described in
また請求項6に記載された発明によれば、請求項1〜請求項5の何れか1項の構成に加えて、前記円筒部材の外周に弱磁性体製のリングを配置したことを特徴とする回転電機が提案される。
According to the invention described in
また請求項7に記載された発明によれば、請求項6の構成に加えて、前記誘導磁極を前記軸線方向に所定間隔で複数配置するとともに、前記リングを前記軸線方向に隣接する前記複数の誘導磁極の間に配置したことを特徴とする回転電機が提案される。
According to the invention described in claim 7, in addition to the configuration of
また請求項8に記載された発明によれば、請求項1〜請求項7の何れか1項の構成に加えて、前記第1、第2フランジ部材を金属素材で構成したことを特徴とする回転電機が提案される。
According to the invention described in claim 8, in addition to the structure of any one of
尚、実施の形態の第1、第2ステータ12L,12Rは本発明のステータに対応し、実施の形態のアウターロータ13は本発明の第1ロータに対応し、実施の形態のインナーロータ14は本発明の第2ロータに対応し、実施の形態の第1、第2電機子21L,21Rは本発明の電機子に対応し、実施の形態の第1誘導磁極39Lおよび第2誘導磁極39Rは本発明の誘導磁極に対応し、実施の形態の第1、第2誘導磁極52L,52Rは本発明の永久磁石に対応する。
The first and
請求項1の構成によれば、ステータの電気子に通電して回転磁界を発生させると、ステータ、第1ロータおよび第2ロータの位置関係に応じて第1ロータの誘導磁極が磁化され、誘導磁極、電気子および永久磁石間に作用する磁力でステータに対して第1ロータおよび第2ロータが回転する。このとき、軸線まわりに回転する第1フランジ部材および第2フランジ部材の外周部間を連結する円筒部材を非導電性材料で構成し、その円筒部材に軟磁性体よりなる誘導磁極を前記軸線を中心とする周方向に所定間隔で支持したので、電流を流さない円筒部材で第1、第2フランジ部材間を電気的に絶縁し、運転時に第1フランジ部材、第2フランジ部材および円筒部材で構成される閉回路を流れる渦電流を低減することで、渦電流に伴う発熱やエネルギー損失を最小限に抑えることができる。
According to the configuration of
また請求項2の構成によれば、円筒部材を樹脂で成形する際に、その円筒部材に誘導磁極を一体化するので、金型成形により円筒部材自体の部品点数を削減できるだけでなく、円筒部材に対する誘導磁極の固定部材が不要になるため、第1ロータの量産性を向上させてコストダウンを図ることが可能となる。
According to the configuration of
また請求項3の構成によれば、誘導磁極は円筒部材の外周面に露出するので、誘導磁極の外周面側のエアギャップを減少させて磁気効率を高めることができる。 According to the third aspect of the present invention, since the induction magnetic pole is exposed on the outer peripheral surface of the cylindrical member, it is possible to increase the magnetic efficiency by reducing the air gap on the outer peripheral surface side of the induction magnetic pole.
また請求項4の構成によれば、誘導磁極は円筒部材の内周面に露出するので、誘導磁極の内周面側のエアギャップを減少させて磁気効率を高めることができる。 According to the fourth aspect of the present invention, since the induction magnetic pole is exposed on the inner peripheral surface of the cylindrical member, the air gap on the inner peripheral surface side of the induction magnetic pole can be reduced to increase the magnetic efficiency.
また請求項5の構成によれば、円筒部材の一対の環状の固定部を、周方向に所定間隔で配置された複数の棒状の誘導磁極支持部で連結し、隣接する誘導磁極支持部間に誘導磁極を支持するので、単純な形状の円筒部材で誘導磁極を確実かつ容易に支持することができる。 According to the fifth aspect of the present invention, the pair of annular fixed portions of the cylindrical member are connected by the plurality of rod-shaped induction magnetic pole support portions arranged at predetermined intervals in the circumferential direction, and between the adjacent induction magnetic pole support portions. Since the induction magnetic pole is supported, the induction magnetic pole can be reliably and easily supported by a simple-shaped cylindrical member.
また請求項6の構成によれば、円筒部材の外周に弱磁性体製のリングを配置したので、第1ロータの回転に伴って円筒部材に作用する遠心力をリングで支持することで、円筒部材の変形を抑制することができる。 Further, according to the configuration of the sixth aspect, since the ring made of the weak magnetic body is arranged on the outer periphery of the cylindrical member, the centrifugal force acting on the cylindrical member with the rotation of the first rotor is supported by the ring. The deformation of the member can be suppressed.
また請求項7の構成によれば、軸線方向に所定間隔で複数配置した誘導磁極の間にリングを配置したので、複数の誘導磁極に作用する遠心力をリングで効果的に支持して円筒部材の変形を抑制することができる。 Further, according to the configuration of the seventh aspect, since the ring is arranged between the induction magnetic poles arranged at a predetermined interval in the axial direction, the cylindrical member effectively supports the centrifugal force acting on the plurality of induction magnetic poles by the ring. Can be suppressed.
以下、本発明の実施の形態を添付の図面に基づいて説明する。 Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings.
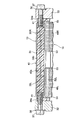
図1〜図16は本発明の第1の実施の形態を示すもので、図1は第1の実施の形態の電動機を軸線方向に見た正面図(図2の1−1線矢視図)、図2は図1の2−2線断面図、図3は図2の3−3線断面図、図4は図2の4−4線断面図、図5は図3の5−5線矢視図、図6は図5の6−6線断面図、図7は図5の7−7線断面図、図8は図5の8−8線断面図、図9は電動機の分解斜視図、図10はインナーロータの分解斜視図、図11は電動機を円周方向に展開した模式図、図12はインナーロータを固定した場合の作動説明図(その1)、図13はインナーロータを固定した場合の作動説明図(その2)、図14はインナーロータを固定した場合の作動説明図(その3)、図15はアウターロータを固定した場合の作動説明図(その1)、図16はアウターロータを固定した場合の作動説明図(その2)である。 1 to 16 show a first embodiment of the present invention, and FIG. 1 is a front view of the electric motor according to the first embodiment viewed in the axial direction (a view taken along line 1-1 in FIG. 2). 2 is a sectional view taken along line 2-2 in FIG. 1, FIG. 3 is a sectional view taken along line 3-3 in FIG. 2, FIG. 4 is a sectional view taken along line 4-4 in FIG. 6 is a sectional view taken along line 6-6 of FIG. 5, FIG. 7 is a sectional view taken along line 7-7 of FIG. 5, FIG. 8 is a sectional view taken along line 8-8 of FIG. FIG. 10 is an exploded perspective view of the inner rotor, FIG. 11 is a schematic diagram in which the electric motor is developed in the circumferential direction, FIG. 12 is an operation explanatory diagram when the inner rotor is fixed (part 1), and FIG. 14 is an operation explanatory diagram when the inner rotor is fixed (No. 3), and FIG. 15 is an operation explanatory diagram when the outer rotor is fixed (No. 1). FIG. 16 is an operation explanatory view of a case of fixing an outer rotor (part 2).
図9に示すように、本実施の形態の電動機Mは、軸線L方向に短い八角筒形状を成すケーシング11と、ケーシング11の内周に固定された円環状の第1、第2ステータ12L,12Rと、第1、第2ステータ12L,12Rの内部に収納されて軸線Lまわりに回転する円筒状のアウターロータ13と、アウターロータ13の内部に収納されて軸線Lまわりに回転する円筒状のインナーロータ14とで構成されるもので、アウターロータ13およびインナーロータ14は固定された第1、第2ステータ12L,12Rに対して相対回転可能であり、かつアウターロータ13およびインナーロータ14は相互に相対回転可能である。
As shown in FIG. 9, the electric motor M according to the present embodiment includes a
図1および図2に示すように、ケーシング11は有底八角筒状の本体部15と、本体部15の開口に複数本のボルト16…で固定される八角板状の蓋部17とで構成されており、本体部15および蓋部17には通気のための複数の開口15a…,17a…が形成される。
As shown in FIGS. 1 and 2, the
図1〜図4および図9に示すように、第1、第2ステータ12L,12Rは、同一構造のものを円周方向にずらして重ね合わせたものであり、その一方の第1ステータ12Lを例にとって構造を説明する。第1ステータ12Lは、積層鋼板よりなるコア18の外周にインシュレータ19を介してコイル20を巻回した複数個(実施の形態では24個)第1電機子21L…を備えており、これらの第1電機子21L…は全体として円環状を成すように円周方向に結合された状態で、リング状のホルダ22で一体化される。ホルダ22の軸線L方向一端から径方向に突出するフランジ22a…が、ケーシング11の本体部15の内面の段部15b(図2参照)に複数本のボルト23…で固定される。
As shown in FIGS. 1 to 4 and 9, the first and
第2ステータ12Rは、上述した第1ステータ12Lと同様に24個の第2電機子21R…を備えており、そのホルダ22のフランジ22a…がケーシング11の本体部15の内面の段部15c(図2参照)に複数本のボルト24…で固定される。このとき、第1ステータ12Lおよび第2ステータ12Rの円周方向の位相は、インナーロータ14の第1、第2永久磁石52L…,52R…のピッチの半分だけ相互にずれている(図3および図4参照)。そして第1、第2ステータ12L,12Rの第1、第2電機子21L…,21R…に、ケーシング11の本体部15に設けた3個の端子25,26,27(図1参照)から3相交流電流を供給することで、第1、第2ステータ12L,12Rに回転磁界を発生させることができる。
Like the
図2および図9に示すように、アウターロータ13の籠状のロータボディ31は、導電性材料である鉄あるいは鉄鋼で構成された円板状の第1、第2フランジ部材32,33と、非導電性の樹脂で構成された概略円筒状の円筒部材34とを組み立てて構成される。第1フランジ部材32の中心から軸線L上に突出する第1アウターロータシャフト32aがボールベアリング35でケーシング11の蓋部17に回転自在に支持されるとともに、第2フランジ部材33の中心から軸線L上に突出する第2アウターロータシャフト33aがボールベアリング36でケーシング11の本体部15に回転自在に支持される。アウターロータ13の出力軸となる第2アウターロータシャフト33aは、ケーシング11の本体部15を貫通して外部に延出する。
As shown in FIGS. 2 and 9, the bowl-shaped
図9に示すように、円筒部材34は、その両端に形成された一対の環状の固定部34a,34aと、軸線L方向に延びて周方向に等間隔で配置され、それらの両端が前記両固定部34a,34aに連結される複数本(実施の形態では20本)の誘導磁極支持部34b…とを一体に備える。誘導磁極支持部34b…の両端に連結される一対の固定部34a,34aには予めナット41…がインサートされており、第1、第2フランジ部材32,33を貫通するボルト37…をワッシャ38…を介して前記ナット41…に螺合することで、円筒部材34と第1、第2フランジ部材32,33とが一体化された籠状のロータボディ31が構成される。ボルト37…およびナット41…は弱磁性体で構成することが望ましい。その理由は、図5から明らかなように、前記ボルト37…およびナット41…が磁路を構成する部分にまで達しているからである。
As shown in FIG. 9, the
このとき、円筒部材34は非導電性の樹脂で構成されているため、第1、第2フランジ部材32,33は相互に電気的に絶縁される。よって第1フランジ部材32、円筒部材34の誘導磁極支持部34b…、第2フランジ部材33および円筒部材34の誘導磁極支持部34b…を介して構成される電気的な閉回路(図5の矢印参照)を確実に遮断することができ、これにより前記閉回路に渦電流が発生するのを防止して発熱やエネルギー損失を最小限に抑えることができる。
At this time, since the
図5〜図9に示すように、円筒部材34の20本の誘導磁極支持部34b…の間には、軸線Lと平行に延びる20本のスリットが形成され、各スリットに軟磁性体製の第1誘導磁極39Lおよび第2誘導磁極39Rと支持される。第1、第2誘導磁極39L…,39R…は、円筒部材34を金型成形する際に一体にインサートされる。第1、第2誘導磁極39L…,39R…の外周面および内周面は、円筒部材34の外周面および内周面から露出している。
As shown in FIGS. 5 to 9, 20 slits extending in parallel to the axis L are formed between the 20 induction magnetic
図5および図8に示すように、第1、第2誘導磁極39L,39Rは、軸線L方向に積層された多数の鋼板で構成されるもので、軸線Lに沿う両側面には四角断面の凹部39a,39aが形成されており、これらの凹部39a,39aが、その両側に位置する円筒部材34の誘導磁極支持部34b…の凸部34c,34cに凹凸係合することで、第1、第2誘導磁極39L,39Rの径方向の脱落が防止される。
As shown in FIGS. 5 and 8, the first and second induction
図5および図9に示すように、円筒部材34の中央部外周に弱磁性体(非磁性体)の帯状金属板を環状に形成したリング40が嵌合する。リング40は 第1誘導磁極39L…および第2誘導磁極39R…の間に嵌合し、かつその側縁に90°間隔で設けた4個の回り止め突起40a…が隣接する第1誘導磁極39L…間に係合することにより、周方向に回り止めされる。
As shown in FIGS. 5 and 9, a
図6および図7に示すように、アウターロータ13が回転すると、第1、第2誘導磁極39L…,39R…に加わる遠心力で円筒部材34…は径方向外側に撓もうとするが、円筒部材34…の軸線L方向中央部をリング40で径方向内向きに押さえることで、円筒部材34…の変形を効果的に抑制してアウターロータ13の高速回転を可能にすることができる。特に、リング40を第1誘導磁極39L…と第2誘導磁極39R…との間に配置したので、重量の大きい第1、第2誘導磁極39L…,39R…に作用する遠心力を効果的に支持することができる。
As shown in FIGS. 6 and 7, when the
図2に示すように、アウターロータ13の第2アウターロータシャフト33aを囲むように、アウターロータ13の回転位置を検出するための第1レゾルバ42が設けられる。第1レゾルバ42は、第2アウターロータシャフト33aの外周に固定されたレゾルバロータ43と、このレゾルバロータ43の周囲を囲むようにケーシング11の蓋部17に固定されたレゾルバステータ44とで構成される。
As shown in FIG. 2, the
図2〜図4および図10に示すように、インナーロータ14は、円筒状に形成されたロータボディ45と、ロータボディ45のハブ45aを貫通してボルト46で固定されたインナーロータシャフト47と、積層鋼板で構成されてロータボディ45の外周に嵌合する円環状の第1、第2ロータコア48L,48Rと、ロータボディ45の外周に嵌合する円環状のスペーサ49とを備える。インナーロータシャフト47の一端は軸線L上で第2アウターロータシャフト33aの内部にボールベアリング50で回転自在に支持され、またインナーロータシャフト47の他端は第1アウターロータシャフト32aの内部にボールベアリング51で回転自在に支持されるとともに、第1アウターロータシャフト32aおよびケーシング11の蓋部17を貫通し、インナーロータ14の出力軸としてケーシング11の外部に延出する。
As shown in FIGS. 2 to 4 and 10, the
ロータボディ45の外周に嵌合する第1、第2ロータコア48L,48Rは同一構造を有するもので、その外周面に沿って複数個(実施の形態では20個)の永久磁石支持孔48a…(図3および図4参照)を備えており、そこに第1、第2永久磁石52L…,52R…が軸線L方向に圧入される。第1ロータコア48Lの隣接する第1永久磁石52L…の極性は交互に反転しており、第2ロータコア48Rの隣接する第2永久磁石52R…の極性は交互に反転しており、かつ第1ロータコア48Lの第1永久磁石52L…の円周方向の位相と、第2ロータコア48Rの第2永久磁石52R…の円周方向の位相とは、それらのピッチの半分だけ相互にずれている(図3および図4参照)。
The first and
そしてロータボディ45の外周の軸線L方向中央に弱磁性体のスペーサ49が嵌合し、その外側に第1、第2永久磁石52L…,52R…を抜け止めする一対の内側永久磁石支持板53,53がそれぞれ嵌合し、その外側に第1、第2ロータコアロータコア48L,48Rがそれぞれ嵌合し、その外側に第1、第2永久磁石52L…,52R…を抜け止めする一対の外側永久磁石支持板54,54がそれぞれ嵌合し、その外側に一対のストッパリング55,55が圧入によりそれぞれ固定される。
A weak
図2に示すように、インナーロータシャフト47を囲むように、インナーロータ14の回転位置を検出するための第2レゾルバ56が設けられる。第2レゾルバ56は、インナーロータシャフト47の外周に固定されたレゾルバロータ57と、このレゾルバロータ57の周囲を囲むようにケーシング11の蓋部17に固定されたレゾルバステータ58とで構成される。
As shown in FIG. 2, a
しかして、図3および図4に示すように、アウターロータ13の外周面に露出する第1誘導磁極39L…の外周面に、僅かなエアギャップを介して第1ステータ12Lの第1電機子21L…の内周面が対向し、アウターロータ13の内周面に露出する第1誘導磁極39L…の内周面に、僅かなエアギャップを介してインナーロータ14の第1ロータコア48Lの外周面が対向する。同様に、アウターロータ13の外周面に露出する第2誘導磁極39R…の外周面に、僅かなエアギャップを介して第2ステータ12Rの第2電機子21R…の内周面が対向し、アウターロータ13の内周面に露出する第2誘導磁極39R…の内周面に、僅かなエアギャップを介してインナーロータ14の第2ロータコア48Rの外周面が対向する。
3 and 4, the
次に、上記構成を備えた第1の実施の形態の電動機Mの作動原理を説明する。 Next, the operation principle of the electric motor M according to the first embodiment having the above configuration will be described.
図11は電動機Mを円周方向に展開した状態を模式的に示すものである。図11の左右両側には、インナーロータ14の第1、第2永久磁石52L…,52R…がそれぞれ示される。第1、第2永久磁石52L…,52R…は円周方向(図11の上下方向)に所定のピッチPでN極およびS極が交互に配置されるとともに、第1永久磁石52L…と第2永久磁石52R…とが所定のピッチPの半分だけ、つまり半ピッチP/2だけずれて配置される。
FIG. 11 schematically shows a state where the electric motor M is developed in the circumferential direction. 11 are shown first and second
図11の中央部には第1、第2ステータ12L,12Rの第1、第2電機子21L…,21R…に対応する仮想永久磁石21…が円周方向に所定のピッチPで配置される。実際には、第1、第2ステータ12L,12Rの第1、第2電機子21L…,21R…の数は各24個であり、インナーロータ14の第1、第2永久磁石52L…,52R…の数は各20個であるため、第1、第2電機子21L…,21R…のピッチはインナーロータ14の第1、第2永久磁石52L…,52R…のピッチPと一致していない。
11, virtual
しかしながら、第1、第2電機子21L…,21R…はそれぞれ回転磁界を形成するため、それら第1、第2電機子21L…,21R…を、ピッチPで配置されて円周方向に回転する20個の仮想永久磁石21…で置き換えることができる。以下、第1、第2電機子21L…,21R…を、仮想永久磁石21…の第1、第2仮想磁極21L…,21R…と呼ぶ。円周方向に隣接する仮想永久磁石21…の第1、第2仮想磁極21L…,21R…の極性は交互に反転しており、かつ各仮想永久磁石21…の第1仮想磁極21L…と第2仮想磁極21R…とは、円周方向に半ピッチP/2だけずれている。
However, since the first and
第1、第2永久磁石52L…,52R…と仮想永久磁石21…との間に、アウターロータ13の第1、第2誘導磁極39L…,39R…が配置される。第1、第2誘導磁極39L…,39R…は円周方向にピッチPで配置されるとともに、第1誘導磁極39L…と第2誘導磁極39R…とは軸線L方向に整列している。
The first and second induction
図11に示すように、仮想永久磁石21の第1仮想磁極21Lの極性が、それに対向する(最も近い)第1永久磁石52Lの極性と異なるときには、仮想永久磁石21の第2仮想磁極21Rの極性が、それに対向する(最も近い)第2永久磁石52Rの極性と同じになる。また仮想永久磁石21の第2仮想磁極21Rの極性が、それに対向する(最も近い)第2永久磁石52Rの極性と異なるときには、仮想永久磁石21の第1仮想磁極21Lの極性が、それに対向する(最も近い)第1永久磁石52Lの極性と同じになる(図13(G)参照)。
As shown in FIG. 11, when the polarity of the first virtual
先ず、インナーロータ14(第1、第2永久磁石52L…,52R…)を回転不能に固定した状態で、第1、第2ステータ12L,12R(第1、第2仮想磁極21L…,21R…)に回転磁界を発生させることで、アウターロータ13(第1、第2誘導磁極39L…,39R…)を回転駆動する場合の作用を説明する。この場合、図12(A)→図12(B)→図12(C)→図12(D)→図13(E)→図13(F)→図13(G)の順番で、固定された第1、第2永久磁石52L…,52R…に対して仮想永久磁石21…が図中下向きに回転することで、第1、第2誘導磁極39L…,39R…が図中下向きに回転する。
First, the first and
図12(A)に示すように、相対向する第1永久磁石52L…および仮想永久磁石21…の第1仮想磁極21L…に対して第1誘導磁極39L…が整列し、かつ相対向する第2仮想磁極21R…および第2永久磁石52R…に対して第2誘導磁極39R…が半ピッチP/2ずれた状態から、仮想永久磁石21…を同図の下方に回転させる。その回転の開始時においては、仮想永久磁石21…の第1仮想磁極21L…の極性は、それに対向する第1永久磁石52L…の極性と異なるとともに、仮想永久磁石21…の第2仮想磁極21R…の極性は、それに対向する第2永久磁石52R…の極性と同じになる。
As shown in FIG. 12A, the first induction
第1誘導磁極39L…が第1永久磁石52L…および仮想永久磁石21…の第1仮想磁極21L…間に配置されているので、第1誘導磁極39L…が第1永久磁石52L…および第1仮想磁極21L…によって磁化され、第1永久磁石52L…、第1誘導磁極39L…および第1仮想磁極21L…間に第1磁力線G1が発生する。同様に、第2誘導磁極39R…が第2仮想磁極21R…および第2永久磁石52R…間に配置されているので、第2誘導磁極39R…が第2仮想磁極21R…および第2永久磁石52R…によって磁化され、第2仮想磁極21R…、第2誘導磁極39R…および第2永久磁石52R…間に第2磁力線G2が発生する。
Since the first induction
図12(A)に示す状態では、第1磁力線G1は、第1永久磁石52L…、第1誘導磁極39L…および第1仮想磁極21L…を結ぶように発生し、第2磁力線G2は、円周方向に隣り合う各2つの第2仮想磁極21R…と両者の間に位置する第2誘導磁極39R…とを結ぶように、また円周方向に隣り合う各2つの第2永久磁石52R…と両者の間に位置する第2誘導磁極39R…とを結ぶように発生する。その結果、この状態では、図12(A)に示すような磁気回路が構成される。この状態では、第1磁力線G1が直線状であることにより、第1誘導磁極39L…には、円周方向に回転させるような磁力は作用しない。また円周方向に隣り合う各2つの第2仮想磁極21R…と第2誘導磁極39R…との間の2つの第2磁力線G2の曲がり度合いおよび総磁束量が互いに等しく、同様に円周方向に隣り合う各2つの第2永久磁石52R…と第2誘導磁極39R…との間の2つの第2磁力線G2の曲がり度合いおよび総磁束量も、互いに等しくなってバランスしている。このため、第2誘導磁極39R…にも、円周方向に回転させるような磁力は作用しない。
In the state shown in FIG. 12A, the first magnetic lines of force G1 are generated so as to connect the first
そして、仮想永久磁石21…が図12(A)に示す位置から図12(B)に示す位置に回転すると、第2仮想磁極21R…、第2誘導磁極39R…および第2永久磁石52R…を結ぶような第2磁力線G2が発生するとともに、第1誘導磁極39L…と第1仮想磁極21L…との間の第1磁力線G1が曲がった状態になる。これに伴い、第1、第2の磁力線G1,G2によって、図14(B)に示すような磁気回路が構成される。
When the virtual
この状態では、第1磁力線G1の曲がり度合いは小さいものの、その総磁束量が多いため、比較的強い磁力が第1誘導磁極39L…に作用する。これにより、第1誘導磁極39L…は、仮想永久磁石21…の回転方向、つまり磁界回転方向に比較的大きな駆動力で駆動され、その結果アウターロータ13が磁界回転方向に回転する。また第2磁力線G2の曲がり度合いは大きいものの、その総磁束量が少ないため、比較的弱い磁力が第2誘導磁極39R…に作用し、それにより第2誘導磁極39R…は磁界回転方向に比較的小さな駆動力で駆動され、その結果アウターロータ13は磁界回転方向に回転する。
In this state, although the degree of bending of the first magnetic lines of force G1 is small, the total amount of magnetic flux is large, so that a relatively strong magnetic force acts on the first induction
次いで、仮想永久磁石21が、図12(B)に示す位置から、図12(C),(D)および図13(E),(F)に示す位置に順に回転すると、第1誘導磁極39L…および第2誘導磁極39R…は、それぞれ第1、第2の磁力線G1,G2に起因する磁力によって磁界回転方向に駆動され、その結果アウターロータ13が磁界回転方向に回転する。その間、第1誘導磁極39L…に作用する磁力は、第1磁力線G1の曲がり度合いが大きくなるものの、その総磁束量が少なくなることによって、徐々に弱くなり、第1誘導磁極39L…を磁界回転方向に駆動する駆動力が徐々に小さくなる。また第2誘導磁極39R…に作用する磁力は、第2磁力線G2の曲がり度合いが小さくなるものの、その総磁束量が多くなることによって徐々に強くなり、第2誘導磁極39R…を磁界回転方向に駆動する駆動力が徐々に大きくなる。
Next, when the virtual
そして、仮想永久磁石21が図13(E)に示す位置から図13(F)に示す位置に回転する間、第2磁力線G2が曲がった状態になるとともに、その総磁束量が最多に近い状態になり、その結果、最強の磁力が第2誘導磁極39R…に作用し、第2誘導磁極39R…に作用する駆動力が最大になる。その後、図13(G)に示すように、仮想永久磁石21が当初の図12(A)の位置からピッチP分回転することにより、仮想永久磁石21の第1、第2仮想磁極21L…,21R…がそれぞれ第1、第2永久磁石52L…,52R…に対向する位置に回転すると、図12(A)の状態と左右が反転した状態となり、その瞬間だけアウターロータ13を円周方向に回転させる磁力は作用しなくなる。
And while the virtual
この状態から、仮想永久磁石21が更に回転すると、第1、第2の磁力線G1,G2に起因する磁力によって、第1、第2誘導磁極39L…,39R…が磁界回転方向に駆動され、アウターロータ13が磁界回転方向に回転する。その際、仮想永久磁石21が再び図12(A)に示す位置まで回転する間、以上とは逆に、第1誘導磁極39L…に作用する磁力は、第1磁力線G1の曲がり度合が小さくなるものの、その総磁束量が多くなることによって強くなり、第1誘導磁極39L…に作用する駆動力が大きくなる。逆に、第2誘導磁極39R…に作用する磁力は、第2磁力線G2の曲がり度合が大きくなるものの、その総磁束量が少なくなることによって弱くなり、第2誘導磁極39R…に作用する駆動力が小さくなる。
When the virtual
また図12(A)と図13(G)とを比較すると明らかなように、仮想永久磁石21がピッチP分回転するのに伴って、第1、第2誘導磁極39L…,39R…が半ピッチP/2分しか回転しないので、アウターロータ13は、第1、第2ステータ12L、12Rの回転磁界の回転速度の1/2の速度で回転する。これは、第1、第2磁力線G1,G2に起因する磁力の作用によって、第1、第2誘導磁極39L…,39R…が、第1磁力線G1で結ばれた第1永久磁石52L…と第1仮想磁極21L…との中間、および第2磁力線G2で結ばれた第2永久磁石52R…と第2仮想磁極21R…トの中間に、それぞれ位置した状態を保ちながら、回転するためである。
12A and 13G, as the virtual
次に、図15および図16を参照しながら、アウターロータ13を固定した状態で、インナーロータ14を回転させる場合の電動機Mの作動について説明する。
Next, the operation of the electric motor M when the
先ず、図15(A)に示すように、各第1誘導磁極39L…が各第1永久磁石52L…に対向するとともに、各第2誘導磁極39R…が隣り合う各2つの第2永久磁石52R…の間に位置した状態から、第1、第2回転磁界を同図の下方に回転させる。その回転の開始時において、各第1仮想磁極21L…の極性を、それに対向する各第1永久磁石52L…の極性と異ならせるとともに、各第2仮想磁極21R…の極性をそれに対向する各第2永久磁石52R…の極性と同じにする。
First, as shown in FIG. 15A, the first induction
この状態から、仮想永久磁石21…が図15(B)に示す位置に回転すると、第1誘導磁極39L…と第1仮想磁極21L…の間の第1磁力線G1が曲がった状態になり、かつ第2仮想磁極21R…が第2誘導磁極39R…に近づくことによって、第2仮想磁極21R…、第2誘導磁極39R…および第2永久磁石52R…を結ぶような第2磁力線G2が発生する。その結果、第1、第2永久磁石52L…,52R…、仮想永久磁石21…および第1、第2誘導磁極39L…,39R…において、前述した図14(B)に示すような磁気回路が構成される。
From this state, when the virtual
この状態では、第1永久磁石52L…と第1誘導磁極39L…との間の第1磁力線G1の総磁束量は高いものの、この第1磁力線G1がまっすぐであるため、第1誘導磁極39L…に対して第1永久磁石52L…を回転させるような磁力が発生しない。また第2永久磁石52R…およびこれと異なる極性の第2仮想磁極21R…の間の距離が比較的長いことにより、第2誘導磁極39R…と第2永久磁石52R…との間の第2磁力線G2の総磁束量は比較的少ないものの、その曲がり度合いが大きいことによって、第2永久磁石52R…に、これを第2誘導磁極39R…に近づけるような磁力が作用する。これにより、第2永久磁石52R…は、第1永久磁石52L…と共に、仮想永久磁石21…の回転方向、即ち磁界回転方向と逆方向(図12の上方)に駆動され、図15(C)に示す位置に向かって回転する。また、これに伴い、インナーロータ14が磁界回転方向と逆方向に回転する。
In this state, although the total magnetic flux amount of the first magnetic lines G1 between the first
そして第1、第2永久磁石52L…,52R…が図15(B)に示す位置から図15(C)に示す位置に向かって回転する間、仮想永久磁石21…は、図15(D)に示す位置に向かって回転する。以上のように、第2永久磁石52R…が第2誘導磁極39R…に近づくことにより、第2誘導磁極39R…と第2永久磁石52R…との間の第2磁力線G2の曲がり度合いは小さくなるものの、仮想永久磁石21…が第2誘導磁極39R…に更に近づくのに伴い、第2磁力線G2の総磁束量は多くなる。その結果、この場合にも、第2永久磁石52R…に、これを第2誘導磁極39R…側に近づけるような磁力が作用し、それにより、第2永久磁石52R…が、第1永久磁石52L…と共に、磁界回転方向と逆方向に駆動される。
While the first and second
また第1永久磁石52L…が磁界回転方向と逆方向に回転するのに伴い、第1永久磁石52L…と第1誘導磁極39L…との間の第1磁力線G1が曲がることによって、第1永久磁石52L…に、これを第1誘導磁極39L…に近づけるような磁力が作用する。しかし、この状態では、第1磁力線G1に起因する磁力は、第1磁力線G1の曲がり度合いが第2磁力線G2よりも小さいことによって、上述した第2磁力線G2に起因する磁力よりも弱い。その結果、両磁力の差分に相当する磁力によって、第2永久磁石52R…が第1永久磁石52L…と共に、磁界回転方向と逆方向に駆動される。
Further, as the first
そして、図15(D)に示すように、第1永久磁石52L…と第1誘導磁極39L…との間の距離と、第2誘導磁極39R…と第2永久磁石52R…との間の距離が互いにほぼ等しくなったときには、第1永久磁石52L…と第1誘導磁極39L…との間の第1磁力線G1の総磁束量および曲がり度合いが、第2誘導磁極39R…と第2永久磁石52R…との間の第2磁力線G2の総磁束量および曲がり度合いとそれぞれほぼ等しくなる。
As shown in FIG. 15D, the distance between the first
その結果、これらの第1、第2磁力線G1,G2に起因する磁力が互いにほぼ釣り合うことによって、第1、第2永久磁石52L…,52R…が一時的に駆動されない状態になる。
As a result, the first and second
この状態から、仮想永久磁石21…が図16(E)に示す位置まで回転すると、第1磁力線G1の発生状態が変化し、図16(F)に示すような磁気回路が構成される。それにより、第1磁力線G1に起因する磁力が、第1永久磁石52L…を第1誘導磁極39L…に近づけるようにほとんど作用しなくなるので、第2磁力線G2に起因する磁力によって、第2永久磁石52R…は、第1永久磁石52L…とともに、図16(G)に示す位置まで、磁界回転方向と逆方向に駆動される。
When the virtual
そして、図16(G)に示す位置から、仮想永久磁石21…が若干回転すると、以上とは逆に、第1永久磁石52L…と第1誘導磁極39L…との間の第1磁力線G1に起因する磁力が、第1永久磁石52L…に、これを第1誘導磁極39L…に近づけるように作用し、それにより、第1永久磁石52L…が第2永久磁石52R…と共に、磁界回転方向と逆方向に駆動され、インナーロータ14が磁界回転方向と逆方向に回転する。そして仮想永久磁石21…が更に回転すると、第1永久磁石52L…と第1誘導磁極39L…との間の第1磁力線G1に起因する磁力と第2誘導磁極39R…と第2永久磁石52R…との間の第2磁力線G2に起因する磁力の差分に相当する磁力によって、第1永久磁石52L…が第2永久磁石52R…と共に、磁界回転方向と逆方向に駆動される。その後、第2磁力線G2に起因する磁力が、第2永久磁石52R…を第2誘導磁極39R…に近づけるようにほとんど作用しなくなると、第1磁力線G1に起因する磁力によって、第1永久磁石52L…が第2永久磁石52R…と共に駆動される。
When the virtual
以上のように、第1、第2回転磁界の回転に伴い、第1永久磁石52L…と第1誘導磁極39L…との間の第1磁力線G1に起因する磁力と、第2誘導磁極39R…と第2永久磁石52R…との間の第2磁力線G2に起因する磁力と、これらの磁力の差分に相当する磁力とが、第1、第2永久磁石52L…,52R…に、即ちインナーロータ14に交互に作用し、それによりインナーロータ14が磁界回転方向と逆方向に回転する。また、そのように磁力、即ち駆動力がインナーロータ14に交互に作用することによって、インナーロータ14のトルクはほぼ一定になる。
As described above, with the rotation of the first and second rotating magnetic fields, the magnetic force caused by the first magnetic field lines G1 between the first
この場合、インナーロータ14は、第1、第2回転磁界と同じ速度で逆回転する。これは、第1、第2磁力線G1,G2に起因する磁力の作用によって、第1、第2誘導磁極39L…,39R…が、第1永久磁石52L…と第1仮想磁極21L…との中間、および第2永久磁石52R…と第2仮想磁極21R…との中間にそれぞれ位置した状態を保ちながら、第1、第2永久磁石525L…,52R…が回転するためである。
In this case, the
以上、インナーロータ14を固定してアウターロータ13を磁界回転方向に回転させる場合と、アウターロータ13を固定してインナーロータ14を磁界回転方向と逆方向に回転させる場合とを別個に説明したが、勿論インナーロータ14およびアウターロータ13の両方を相互に逆方向に回転させることも可能である。
As described above, the case where the
以上のように、インナーロータ14およびアウターロータ13のいずれか一方、あるいはインナーロータ14およびアウターロータ13の両方を回転させる場合に、インナーロータ14およびアウターロータ13の相対的な回転位置に応じて、第1、第2誘導磁極39L…,39R…の磁化の状態が変わり、滑りを生じることなく回転させることが可能であり、同期機として機能するので、効率を高めることができる。また第1仮想磁極21L…、第1永久磁石52L…および第1誘導磁極39L…の数が互いに同じに設定されるとともに、第2仮想磁極21R…、第2永久磁石52R…および第2誘導磁極39R…の数が互いに同じに設定されているので、インナーロータ14およびアウターロータ13のいずれを駆動する場合にも、電動機Mのトルクを十分に得ることができる。
As described above, when rotating either one of the
しかして、本実施の形態によれば、アウターロータ13の円筒部材34を樹脂で一体に金型成形するので、その円筒部材34自体の部品点数を削減できるだけでなく、円筒部材34を金型成形する際に、その内部に第1、第2誘導磁極39L…,39R…を埋め込んで固定するので、円筒部材34に対して第1、第2誘導磁極39L…,39R…を固定するための特別の固定部材が不要になり、アウターロータ13の量産性を向上させてコストダウンを図ることが可能となる。
Thus, according to the present embodiment, the
また第1、第2誘導磁極は39L…,39R…は円筒部材34の外周面および内周面に露出するので、第1、第2ステータ12L,12Rの第1、第2電機子21L…,21R…との間のエアギャップ、あるいはインナーロータ14の第1、第2永久磁石52L…,52R…との間のエアギャップを減少させて磁気効率を高めることができる。
Since the first and second induction
次に、図17に基づいて本発明の第2の実施の形態を説明する。 Next, a second embodiment of the present invention will be described with reference to FIG.
第1の実施の形態では、円筒部材34の隣接する誘導磁極支持部34b…間に支持された第1、第2誘導磁極39L…,39R…の外周面および内周面が露出していたが、第2の実施の形態では第1、第2誘導磁極39L…,39R…の外周面および内周面が隣接する誘導磁極支持部34b…間を架橋する薄い樹脂膜34d…で完全に覆われて外部から目視不能になっている。この構造により、第1、第2誘導磁極39L…,39R…が遠心力で外側に飛び出す虞がなくなり、誘導磁極支持部34b…および第1、第2誘導磁極39L…,39R…を凹凸係合させる必要がなくなる。
In the first embodiment, the outer peripheral surface and inner peripheral surface of the first and second induction
以上、本発明の実施の形態を説明したが、本発明はその要旨を逸脱しない範囲で種々の設計変更を行うことが可能である。 The embodiments of the present invention have been described above, but various design changes can be made without departing from the scope of the present invention.
例えば、実施の形態では電動機Mを例示したが、本発明はアウターロータおよびインナーロータの一方を固定して他方を回転させることでステータに起電力を発生させる発電機にも適用することができる。 For example, although the motor M in the embodiment, the present invention can also be applied to a generator to generate an electromotive force in the stator by rotating the other by fixing the one of the outer rotor and the inner rotor.
また実施の形態ではステータ12L,12Rを径方向外側に配置してインナーロータ14を径方向内側に配置しているが、ステータ12L,12Rを径方向内側に配置してインナーロータ14を径方向外側に配置しても良い。In the embodiment, the
また実施の形態ではアウターロータ13の円筒部材34に樹脂を用いているが,樹脂以外の任意の非導電性材料を採用することができる。
In the embodiment, resin is used for the
また実施の形態では第1、第2フランジ部材32,33と円筒部材34…とをボルト37…で固定しているが、固定手段はボルト37…に限定されず、カシメ、圧入、リベット、クリップ、溶着等の任意の手段を採用することができる。
In the embodiment, the first and
12L 第1ステータ(ステータ)
12R 第2ステータ(ステータ)
13 アウターロータ(第1ロータ)
14 インナーロータ(第2ロータ)
21L 第1電機子(電機子)
21R 第1電機子(電機子)
32 第1フランジ部材
33 第2フランジ部材
34 円筒部材
34a 固定部
34b 誘導磁極支持部
39L 第1誘導磁極(誘導磁極)
39R 第2誘導磁極(誘導磁極)
40 リング
52L 第1永久磁石(永久磁石)
52R 第2永久磁石(永久磁石)
L 軸線
12L first stator (stator)
12R second stator (stator)
13 outer rotor (first rotor)
14 Inner rotor (second rotor)
21L first armature (armature)
21R first armature (armature)
32
39R Second induction magnetic pole (induction magnetic pole)
40 rings
52L first permanent magnet (permanent magnet)
52R second permanent magnet (permanent magnet)
L axis
Claims (7)
前記第1ロータ(13)は、共通の軸線(L)まわりに回転可能に配置された第1フランジ部材(32)および第2フランジ部材(33)の外周部間を非導電性材料で構成した円筒部材(34)で連結し、前記円筒部材(34)に軟磁性体よりなる誘導磁極(39L,39R)を前記軸線(L)を中心とする周方向に所定間隔で支持して構成されることを特徴とする回転電機。 A stator (12L, 12R) having a plurality of electric elements (21L, 21R) arranged in the circumferential direction and a plurality of soft magnetic induction poles (39L, 39R) arranged in the circumferential direction. One rotor (13) and a second rotor (14) having a plurality of permanent magnets (52L, 52R) arranged in the circumferential direction are arranged in order in the radial direction,
The first rotor (13) is made of a non-conductive material between the outer peripheral portions of the first flange member (32) and the second flange member (33) that are rotatably arranged around a common axis (L). Connected by a cylindrical member (34), and configured to support the cylindrical magnetic member (34) with induction magnetic poles (39L, 39R) made of a soft magnetic material at a predetermined interval in the circumferential direction around the axis (L). Rotating electric machine characterized by that .
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007129639A JP4859751B2 (en) | 2007-05-15 | 2007-05-15 | Rotating electric machine |
| CN2008800129123A CN101663807B (en) | 2007-04-23 | 2008-04-17 | Rotor for rotating machine |
| KR1020097023642A KR101099894B1 (en) | 2007-04-23 | 2008-04-17 | Rotors for rotary electric machines |
| CA2681713A CA2681713C (en) | 2007-04-23 | 2008-04-17 | Rotor for rotating electrical machine |
| PCT/JP2008/057480 WO2008133163A1 (en) | 2007-04-23 | 2008-04-17 | Rotor for rotating machine |
| EP08740550.2A EP2141784B1 (en) | 2007-04-23 | 2008-04-17 | Rotor for rotating machine |
| US12/081,844 US7932657B2 (en) | 2007-04-23 | 2008-04-22 | Rotor for rotating electrical machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007129639A JP4859751B2 (en) | 2007-05-15 | 2007-05-15 | Rotating electric machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008289227A JP2008289227A (en) | 2008-11-27 |
| JP4859751B2 true JP4859751B2 (en) | 2012-01-25 |
Family
ID=40148436
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007129639A Active JP4859751B2 (en) | 2007-04-23 | 2007-05-15 | Rotating electric machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4859751B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4258523A4 (en) * | 2020-12-02 | 2024-06-19 | Panasonic Intellectual Property Management Co., Ltd. | Magnetic-geared motor and magnetic gear |
| EP4383532A4 (en) * | 2021-08-02 | 2024-10-23 | Mitsubishi Electric Corporation | MAGNETIC STRESS WAVE GEAR DEVICE |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021210118A1 (en) * | 2020-04-16 | 2021-10-21 | 三菱電機株式会社 | Rotating electric machine |
| CN115336151A (en) * | 2020-04-16 | 2022-11-11 | 三菱电机株式会社 | Magnetic gear motor |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5287603A (en) * | 1976-01-16 | 1977-07-21 | Hitachi Metals Ltd | Magnet rotor |
| JPS63290147A (en) * | 1988-04-28 | 1988-11-28 | Mitsuba Electric Mfg Co Ltd | Manufacture of electrical rotating machine rotor |
| JPH099602A (en) * | 1995-06-21 | 1997-01-10 | Toyoda Mach Works Ltd | Stepping motor |
| JP2006304409A (en) * | 2005-04-15 | 2006-11-02 | Nsk Ltd | Permanent magnet rotary machine |
-
2007
- 2007-05-15 JP JP2007129639A patent/JP4859751B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4258523A4 (en) * | 2020-12-02 | 2024-06-19 | Panasonic Intellectual Property Management Co., Ltd. | Magnetic-geared motor and magnetic gear |
| EP4383532A4 (en) * | 2021-08-02 | 2024-10-23 | Mitsubishi Electric Corporation | MAGNETIC STRESS WAVE GEAR DEVICE |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008289227A (en) | 2008-11-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8294318B2 (en) | Electric motor and rotor for rotating electric machine | |
| US6172438B1 (en) | Two-phase permanent-magnet electric rotating machine | |
| WO2013047076A1 (en) | Rotating electric machine | |
| EP1359661A2 (en) | Brushless motor and electric power steering apparatus equipped with the brushless motor | |
| JP2010017032A (en) | Stator for rotary electric machine and motor | |
| WO2003056688A1 (en) | Generator | |
| JP4784726B2 (en) | DC motor | |
| JP2018082600A (en) | Double rotor type rotating electrical machine | |
| JP4859751B2 (en) | Rotating electric machine | |
| JP5869306B2 (en) | Rotor and motor | |
| JP6658707B2 (en) | Rotating electric machine | |
| JP4680980B2 (en) | Electric motor | |
| JP4767902B2 (en) | Rotating electric machine | |
| JP4801824B2 (en) | Magnetic machine | |
| JP2010017028A (en) | Rotor for rotating electric machine and electric motor | |
| JP2008193823A (en) | Rotor structure | |
| JP5731055B1 (en) | Outer rotor generator | |
| JP4767997B2 (en) | Rotating electric machine rotor and electric motor | |
| JP4691087B2 (en) | Electric motor | |
| JP4648378B2 (en) | Electric motor | |
| JP5452530B2 (en) | Magnetic inductor type rotary motor | |
| JP4767903B2 (en) | Rotating electric machine | |
| JP4712000B2 (en) | Rotor for rotating electrical machines | |
| JP2010017031A (en) | Rotor for rotating electric machine | |
| JP2010017030A (en) | Rotor for rotating electric machine and electric motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110302 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111019 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111101 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4859751 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141111 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |