JP4829151B2 - ロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置 - Google Patents
ロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置 Download PDFInfo
- Publication number
- JP4829151B2 JP4829151B2 JP2007058724A JP2007058724A JP4829151B2 JP 4829151 B2 JP4829151 B2 JP 4829151B2 JP 2007058724 A JP2007058724 A JP 2007058724A JP 2007058724 A JP2007058724 A JP 2007058724A JP 4829151 B2 JP4829151 B2 JP 4829151B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- teaching point
- program
- evaluation
- pseudo
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Numerical Control (AREA)
- Manipulator (AREA)
Description

負荷トルク=ニュートンオイラトルク+摩擦力+ロータイナーシャ駆動力
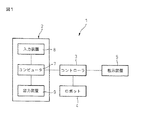
7,7A〜7C コンピュータ
8 入力装置
9 出力装置
10,20 動作指定手段
11 経路指定手段
12 ずれ量指定手段
13,21 シミュレーション手段
14 記録手段
15,23 記憶手段
16 修正手段
22 負荷算出手段
24 判定手段
25 修正手段
Claims (4)
- ロボットが所望の動作を行うように該ロボットの動作プログラムを修正するためのロボットプログラム評価・修正方法であって、
前記ロボットの目標動作経路上の目標教示点と、前記目標教示点に対応するシミュレーションによる擬似動作経路上の擬似教示点との間のずれ量を算出し記録することと、
前記目標教示点を修正すべきか否かを評価する評価関数としてのずれ量が許容値を超えているかを評価し、前記ずれ量が前記許容値より大きい場合には、該ずれ量が小さくなるように所定の変更幅で、前記擬似教示点に対応する前記動作プログラム中の教示点をずらし、該ずれ量が前記許容値より小さくなるまで前記シミュレーションを繰り返し実行し、前記擬似教示点に対応する前記動作プログラム中の教示点を修正することと、
を備えるロボットプログラム評価・修正方法。 - 前記シミュレーションによって、前記ロボットの動作部分を駆動するモータの負荷を算出することと、
前記モータの負荷が許容値を超えているかを評価関数により評価することと、
をさらに備える請求項1に記載のロボットプログラム評価・修正方法。 - ロボットの動作プログラムを修正するためのロボットプログラム評価・修正装置であって、
前記ロボットの動作を確認するためのシミュレーション機能を有するコンピュータを備え、
該コンピュータが、前記ロボットの目標動作経路上の目標教示点と、前記目標教示点に対応するシミュレーションによる擬似動作経路上の擬似教示点との間のずれ量を算出し記憶する記憶手段と、
前記目標教示点を修正すべきか否かを評価する評価関数としてのずれ量が許容値を超えているかを評価し、前記ずれ量が前記許容値より大きい場合には、該ずれ量が小さくなるように所定の変更幅で、前記擬似教示点に対応する前記動作プログラム中の教示点をずらし、該ずれ量が前記許容値より小さくなるまで前記シミュレーションを繰り返し実行し、前記擬似教示点に対応する前記動作プログラム中の教示点を修正する修正手段と、を備えるロボットプログラム評価・修正装置。 - 前記コンピュータが、前記シミュレーションによって前記ロボットの動作部分を駆動するモータの負荷を算出する負荷算出手段と、
前記モータの負荷が許容値を超えているかを評価関数により評価する判定手段と、
をさらに備える請求項3に記載のロボットプログラム評価・修正装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007058724A JP4829151B2 (ja) | 2005-07-25 | 2007-03-08 | ロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005214890 | 2005-07-25 | ||
| JP2005214890 | 2005-07-25 | ||
| JP2007058724A JP4829151B2 (ja) | 2005-07-25 | 2007-03-08 | ロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006194764A Division JP3946753B2 (ja) | 2005-07-25 | 2006-07-14 | ロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007136671A JP2007136671A (ja) | 2007-06-07 |
| JP4829151B2 true JP4829151B2 (ja) | 2011-12-07 |
Family
ID=38200121
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007058724A Active JP4829151B2 (ja) | 2005-07-25 | 2007-03-08 | ロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4829151B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10139803B2 (en) | 2014-04-16 | 2018-11-27 | Mitsubishi Electric Corporation | Instruction value generation device |
| JP5877867B2 (ja) | 2014-04-25 | 2016-03-08 | ファナック株式会社 | 複数台のロボットのシミュレーション装置 |
| JP5890477B2 (ja) | 2014-07-09 | 2016-03-22 | ファナック株式会社 | ロボットプログラム修正システム |
| JP5908544B2 (ja) * | 2014-08-11 | 2016-04-26 | ファナック株式会社 | 駆動軸のジャークを低下させるロボットプログラムを生成するロボットプログラム生成装置 |
| JP6838028B2 (ja) | 2018-10-31 | 2021-03-03 | ファナック株式会社 | 自動プログラム修正装置および自動プログラム修正方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3208722B2 (ja) * | 1994-03-28 | 2001-09-17 | 日本電信電話株式会社 | マニピュレータ用追従装置及び追従制御方法 |
| JPH08328632A (ja) * | 1995-05-26 | 1996-12-13 | Matsushita Electric Works Ltd | ロボット動作のシミュレーション方法 |
| JPH09244724A (ja) * | 1996-03-11 | 1997-09-19 | Asahi Sanac Kk | ロボットの動作プログラム作成方法及びその作成装置 |
| JPH10111708A (ja) * | 1996-10-03 | 1998-04-28 | Mitsubishi Electric Corp | 位置決め制御装置 |
| JP2001100834A (ja) * | 1999-09-29 | 2001-04-13 | Nissan Motor Co Ltd | ロボット教示データの作成装置およびその方法 |
| JP3840973B2 (ja) * | 2001-12-25 | 2006-11-01 | 日産自動車株式会社 | ロボット教示データの補正方法 |
| JP2004326732A (ja) * | 2003-04-08 | 2004-11-18 | Nissan Motor Co Ltd | シミュレーション用ロボットの誤差パラメータ同定方法 |
| JP3797986B2 (ja) * | 2003-07-03 | 2006-07-19 | ファナック株式会社 | ロボットオフラインシミュレーション装置 |
| JP3819883B2 (ja) * | 2003-08-27 | 2006-09-13 | ファナック株式会社 | ロボットプログラム位置修正装置 |
| JP2005149016A (ja) * | 2003-11-13 | 2005-06-09 | Fanuc Ltd | ロボットプログラム修正装置 |
-
2007
- 2007-03-08 JP JP2007058724A patent/JP4829151B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007136671A (ja) | 2007-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3946753B2 (ja) | ロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置 | |
| JP4256440B2 (ja) | ロボットプログラム調整装置 | |
| CN102119072B (zh) | 有助于对离线编程机器人单元进行校准的方法和系统 | |
| US7643905B2 (en) | Robot program correcting apparatus | |
| JP4056542B2 (ja) | ロボットのオフライン教示装置 | |
| JP6669715B2 (ja) | 振動抑制装置 | |
| US20120029700A1 (en) | Method for offline programming of an nc-controlled manipulator | |
| US10507585B2 (en) | Robot system that displays speed | |
| JP4829151B2 (ja) | ロボットプログラム評価・修正方法及びロボットプログラム評価・修正装置 | |
| EP4052865A1 (en) | Information processing apparatus, robot system, information processing method, program, and recording medium | |
| JP2010218036A (ja) | ロボットオフラインプログラミング装置 | |
| JP6392817B2 (ja) | シミュレーション装置 | |
| Bulej et al. | Simulation of manipulation task using i RVision aided robot control in Fanuc RoboGuide software | |
| JP5272447B2 (ja) | 数値制御機械の動作シミュレータ | |
| JP7046531B2 (ja) | ロボットの制御方法、ロボットの制御装置、情報処理方法、情報処理装置、教示方法、教示装置、ロボットの制御方法を用いた物品の製造方法、プログラムおよび記録媒体 | |
| Mousavi Mohammadi et al. | A real-time impedance-based singularity and joint-limits avoidance approach for manual guidance of industrial robots | |
| KR20200097896A (ko) | 매니퓰레이터 urdf파일 생성장치 및 방법 | |
| JP7232704B2 (ja) | ロボットプログラム評価装置、ロボットプログラム評価方法及びロボットプログラム評価プログラム | |
| JP7704862B2 (ja) | 機構データに基づいてロボットを制御するロボットの制御装置および動作プログラムの修正装置 | |
| Dhawan et al. | A Web-based Framework for Intuitive Offline Programming of Serial-chain Robots with Environment Objects | |
| JP2020121358A (ja) | 学習制御装置、ロボット制御装置およびロボット | |
| JP2006092034A (ja) | ロボット動作経路データ作成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100309 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110104 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110302 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110823 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110915 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140922 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4829151 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |