JP4462256B2 - Seedling planting machine - Google Patents
Seedling planting machine Download PDFInfo
- Publication number
- JP4462256B2 JP4462256B2 JP2006275225A JP2006275225A JP4462256B2 JP 4462256 B2 JP4462256 B2 JP 4462256B2 JP 2006275225 A JP2006275225 A JP 2006275225A JP 2006275225 A JP2006275225 A JP 2006275225A JP 4462256 B2 JP4462256 B2 JP 4462256B2
- Authority
- JP
- Japan
- Prior art keywords
- button
- seedling planting
- lowering
- switch
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Transplanting Machines (AREA)
Description
この発明は、車体に対して苗植作業装置を昇降可能に装着した苗植機に関するものである。 The present invention relates to a seedling planting machine in which a seedling planting device is mounted on a vehicle body so as to be movable up and down.
車体に対して苗植装置を昇降するための昇降レバーを設けた苗植機がある。
苗植機は、圃場面を走行しながら苗植装置を車体に対して昇降させたり、苗植付伝動の植付クラッチを入り切りさせたりしながら、苗植条の端では条合せを行い、しかも、苗補給操作等を行う等の多くの操作を要するものである。
そこで、本発明は、操作性を高めることを課題とする。また、エンジン始動時に不意に苗植装置が駆動したり昇降したりするのを防止することを課題とする。
The seedling transplanter adjusts at the end of the seedlings while moving the planting device up and down with respect to the car body while driving on the farm scene and turning the seedling planting transmission clutch on and off. In addition, many operations such as performing seedling replenishment operations are required.
Accordingly, an object of the present invention is to improve operability. Another object of the present invention is to prevent the seedling planting device from being unexpectedly driven or moved up and down when the engine is started.
請求項1記載の発明は、エンジン(10)により変速装置(11)を介して前車輪(13)及び後車輪(14)を駆動して走行する車体(9)に苗植作業装置(3)を昇降制御弁(23)により昇降可能に装着すると共に、PTO軸(17)にて苗植作業装置(3)へエンジン(10)の駆動を伝動する構成とした苗植機において、変速装置(11)を操作する変速レバー(1)のグリップ部(2)に、苗植作業装置(3)の上昇操作を行う上昇スイッチ(4U)と、苗植作業装置(3)の下降操作及び前記PTO軸(17)の伝動を入切するPTOクラッチ(18)の操作を行う下降釦(7)とを設け、グリップ部(2)に、苗植作業装置(3)の下降操作を行う下降専用の下げ釦(8)を、下降釦(7)とは別に設け、上昇スイッチ(4U)、下降釦(7)及び下げ釦(8)の操作により駆動するアクチュエータ(24)と、該アクチュエータ(24)のピニオン(55)に噛合して回転するラックギヤ(56)と、各係合位置にカムローラ(38)が係合することにより回動位置が係止される位置決めカム(36)と、ラックギヤ(56)と位置決めカム(36)をピン(45)と長穴(46)によって遊動間隙を介して係合する位置決め遊動機構(59)とを設け、アクチュエータ(24)の駆動により位置決め遊動機構(59)を介してPTOクラッチ(18)及び昇降制御弁(23)を作動し、エンジンスイッチ(50)のOFFによりアクチュエータ(24)を駆動して昇降制御弁(23)を中立位置に切替える構成としたことを特徴とする苗植機としたものである。 According to the first aspect of the present invention, the seedling planting device (3) is mounted on the vehicle body (9) that travels by driving the front wheel (13) and the rear wheel (14) via the transmission (11) by the engine (10). In a seedling planting machine configured to transmit the drive of the engine (10) to the seedling planting device (3) by the PTO shaft (17). 11) A lift switch (4U) for raising the seedling planting device (3), a lowering operation of the seedling planting device (3), and the PTO A lowering button (7 ) for operating the PTO clutch (18) for turning on / off the transmission of the shaft (17) is provided, and the grip part (2) is dedicated to lowering for lowering the seedling planting device (3). the lowering button (8), provided separately from the downward button (7), raising switch (4 ), The actuator (24) driven by the operation of the lowering button (7) and the lowering button (8), the rack gear (56) rotating in mesh with the pinion (55) of the actuator (24), and each engagement position The positioning cam (36) whose rotational position is locked by the engagement of the cam roller (38) with the rack gear (56) and the positioning cam (36) are connected to each other by a pin (45) and an elongated hole (46). A positioning floating mechanism (59) that is engaged via the actuator, the actuator (24) is driven to operate the PTO clutch (18) and the elevation control valve (23) via the positioning floating mechanism (59), and the engine switch it is obtained by a seedling planting machine, characterized in that to drive the actuator (24) is configured to switch elevation control valve (23) to the neutral position by the OFF of (50)
請求項1に記載の発明は、変速装置(11)を操作する変速レバー(1)のグリップ部(2)に、苗植作業装置(3)の上昇操作を行う上昇スイッチ(4U)と、苗植作業装置(3)の下降操作及び前記PTO軸(17)の伝動を入切するPTOクラッチ(18)の操作を行う下降釦(7)とを設け、グリップ部(2)に、苗植作業装置(3)の下降操作を行う下降専用の下げ釦(8)を、下降釦(7)とは別に設けたので、操縦者は、苗植作業装置(3)の昇降及び苗植作業装置(3)へのPTOクラッチ(18)の操作が行え、操作性を高めることができる。 According to the first aspect of the present invention, the grip switch (4) of the speed change lever (1) for operating the speed change device (11) is provided with a lift switch (4U) for raising the seedling planting device (3), and a seedling. A lowering button (7) for operating the lowering operation of the planting device (3) and the operation of the PTO clutch (18) for turning on and off the transmission of the PTO shaft (17) is provided. Since the lowering button (8) dedicated to lowering the device (3) is provided separately from the lowering button (7) , the operator can raise and lower the seedling planting device (3) and the seedling planting device ( The operation of the PTO clutch (18) to 3) can be performed, and the operability can be improved.
また、エンジン始動時に不意に苗植作業装置(3)が駆動したり昇降したりするのを防止できる。 Further , it is possible to prevent the seedling planting device (3) from being unexpectedly driven or moved up and down when the engine is started.
この発明に係る移動農機の操作装置は、苗植機や、施肥播種機、トラクタに装着する各種管理作業機、又はコンバイン等に利用できる。苗植機等の移動農機では、図例に示すように、車体9の走行と、この車体9に対して昇降可能に装着される作業装置3の昇降と、この作業装置3が車体側9からの伝動によって対地作業する伝動との、各作動を行わせる形態としている。
The operation device for a mobile agricultural machine according to the present invention can be used for a seedling planting machine, a fertilizer seeding machine, various management work machines to be attached to a tractor, or a combine. In a mobile agricultural machine such as a seedling transplanter, as shown in the figure, the
ここに、車体9の走行は、エンジン10の駆動によってHST(油圧無段変速装置)11の主変速装置や、ミッションケース12内の副変速装置等を経て前車輪13、後車輪14を伝動させて走行できる構成としている。又、作業装置3の昇降は、車体9の後側にリフトリンク15を介して作業装置3を連結し、リフトシリンダ16の伸縮によって昇降させて、非作業位置に上昇したり、対地作業位置に下降することができる。又、作業装置3の伝動は、前記エンジン10からPTO軸17を介して行われ、このPTO軸17の伝動を入切するPTOクラッチ18を介して行われる。
Here, the
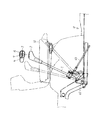
前記HST11は、運転席19の右側に設けられる変速レバー1によって変速操作される。この変速レバー1を中立位置に操作したときは、走行伝動停止状態として、変速レバー1を前側へ操作することによって前進高速状態とし、中立位置から後側へ操作することによって後進高速状態として、変速レバー1の傾斜角度に応じて前、後進速度を増減速することができる。
The HST 11 is shifted by a
又、副変速レバー20は、ステアリングハンドル21下方のダッシュボード22上に設けられる。
前記リフトシリンダ16を伸縮する油圧回路の昇降制御弁23と、PTOクラッチ18とが、電動モータ乃至ステッピングモータ等によるアクチュエータ24によって、操作駆動機構25を介して連動される。このアクチュエータ24は、前記変速レバー1のグリップ部2に配置の昇降スイッチ4や作業スイッチ5等のON,OFF操作によってコントローラ26からの出力によって作動される。
The
A
又、前記作業装置3としては、多条植え形態の苗植作業装置として、マット状苗を収容して左右へ往復移動しながら繰出すことができる苗タンク27と、この各苗タンク27から繰り出される苗を分離して下方の土壌面に植付ける苗植爪28と、これらの苗植フレーム29を支持して土壌面を滑走するセンタフロート30とサイドフロート31等から構成される。このセンタフロート30の上下動により接地状態を検出する接地センサー32が設けられて、この接地センサー32の検出で前記昇降背御弁23を切替えて、リフトシリンダ16を伸縮し、苗植作業時の苗植作業装置3の接地高さを一定に維持制御させて、苗植付深さを一定に保持するように制御する。
The working device 3 is a multi-planted seedling planting device that accommodates mat-like seedlings and can be fed out while reciprocating to the left and right, and the
ここで、変速レバー1のグリップ部2に作業装置3の昇降を行う昇降スイッチ4と、作業伝動を行う作業スイッチ5とを設けたので、車速変速から作業装置3の昇降、乃至作業伝動に渡る一連の操作を、グリップ部2から把持手の持替えをなくして、又は、変速操作しながらの昇降操作や植付伝動操作を行って、速やかな操作を行い操作性を高めることができる。
Here, since the lifting /
ここにおいて、変速レバー1を操作することによってHST11を操作して作業機の車速を変更することができる。操縦者は、この変速レバー1のグリップ部2を把持した状態で、昇降スイッチ4の上昇スイッチ4U又は下降スイッチ4Dを操作することにより、アクチュエータ24を出力させて、操作駆動機構25を介して、昇降制御弁23を切替えてリフトシリンダ16を伸縮し、作業装置3を車体9に対して昇降させることができる。又、作業スイッチ5が操作されることにより、同アクチュエータ24を作動させて操作駆動機構25を介して、PTOクラッチ18が入り切り作動されて、この作業装置3を伝動することができる。
Here, by operating the
前記作業スイッチ5は、昇降スイッチ4の下降スイッチ4Dと独立の構成とすることができるが、図例では、アクチュエータ24や操作駆動機構25を昇降制御弁23の連動と共用化する形態であるから、この作業スイッチ5をも下降スイッチ4Dと共用化することもできる。この場合は、リフトシリンダ15の昇降位置を検出するリフトリンクセンサ33、又は前記センタフロート30の上下による接地センサ32の検出によって、苗植作業装置3が一定の作業位置に下降した状態のときに、PTOクラッチ18が入りに作動されて苗植作業を行いうる構成とする。
The
前記昇降スイッチ4は、押込毎に上昇と上昇停止とに切替える上昇釦6と、押込毎に下降と下降停止とに切替える下降釦7とを有するので、上昇釦6と下降釦7の押込毎に各々上昇とこの上昇停止、下降とこの下降停止に切替えるものであるから、これらの操作を的確にして容易化できる。又、上昇及び下降行程は時間的に長く維持できて、速やかな上昇、下降を行わせることができる。
The raising / lowering
ここにおいて、上昇スイッチ4Uは上昇釦6を押込操作してON作動され、下降スイッチ4Dは下降釦7を押込操作してON作動される。上昇釦6を押込操作する毎にアクチュエータ24や操作駆動機構25を介して昇降制御弁23を切替えてリフトシリンダ16を伸長させ、作業装置3を上昇させたり、この上昇を停止させるように切替えできる。この上昇操作時は昇降制御弁23は上昇位置に保持されて、作業装置3は継続的に上昇される。
Here, the ascending switch 4U is turned on by pushing the raising
又、この下降釦7を押込操作する毎に下降スイッチ4DをON作動して、同様にして作業装置3の下降と、この下降停止とに切替える。この下降時は作業装置3が継続的に下降される。
Further, every time the lowering
前記下降釦7は、作業装置3の作業位置への下降によって作業伝動の入り切りを切替えることができるので、前記のように下降釦7は、作業装置3を下降させることができるが、この作業装置3が作業位置に達したときは、この下降釦7の押込毎に作業装置3への作業伝動が入りと切りとに切替えられて、作業を行わせたり停止させることができる。作業装置3を下降させる同一下降釦7で作業伝動とこの伝動停止とに切替えできて、操作性を高めることができる。
Since the lowering
前記上昇釦6と下降釦7との突出量を異にするように設定するので、上昇釦6と下降釦7とのグリップ部2における突出量を異にして釦相互間の操作感覚を異にして、上昇釦6と下降釦7との区別性をよくして誤操作を少くすることができる。
Since the protruding amount of the ascending
前記上昇釦6は、グリップ部2の先端側に位置させ、下降釦7はこの上昇釦6よりも下位に配置したので、変速レバー1のグリップ部2の先端側に上昇釦6が設けられ、この下側に下降釦7が配置されるため、作業装置3の昇降方向と同側に対応させて、操作の選択が正確に行われ、誤操作を少くすることができる。
Since the ascending
前記グリップ部2には、押込みによって下降し、押込解除で下降を停止する下げ釦8を有するので、変速レバー1のグリップ部2には、前記下降釦7とは別に下降専用の下げ釦8を有することによって、畦際での作業開始の位置合せ等では、この下げ釦8の押し込みと押込解除とによって作業装置3の下降、停止の切替えを行わせることができ、微妙な位置合せを行わせ易くし、操作性を高めることができる。
Since the
前記下げ釦8は、上昇釦6及び下降釦7よりも後位に配置したので、使用頻度の少い下げ釦8を、上昇釦6や下降釦7よりも後位に配置されるため、誤操作を少くすることができる。
Since the
ここにおいて、前記各上昇釦6、下降釦7、及び下げ釦8は、グリップ部2の親指側に配置されるが、これとは反対の子指乃至薬指側に配置して、中指等で押操作できるように構成することもできる。又、これら上昇釦6と下降釦7は親指側に設け、下げ釦8を反対側に設けることもできる。又、各釦6,7,8の指先接触の感覚を異にするために、外形や接触面の凹凸形状を異にすることもできる。
Here, each of the up
60は補助苗載枠で、車体9前部のダッシュボード22の左右両側方に配置される。61は施肥装置で、苗植爪28の苗植位置近くの土壌面を施肥する。
前記アクチュエータ24によって駆動される操作駆動機構25は、前記のように昇降制御弁23とPTOクラッチ18とを駆動すると共に、運転席19横側の手動操作用の苗植昇降レバー34をも駆動できる構成としている。
The
このアクチュエータ24のモータによる電動によって操作駆動機構25であるピニオン55と噛合のラックギヤ56を、車体9と一体の構成部材であるブラケット52に設けられる軸35回りに回動自在に軸支する。また、この軸35には、手動操作機構である苗植昇降レバー34と一体の位置決めカム36が回動自在に設けられる。この位置決めカム36外周部には揺動アーム37のカムローラ38が摺接し嵌合されて、この位置決めカム36の回動位置を係止したり、回動自在の状態に係止解除することができる。39はこの揺動アーム37の支軸、40はカムローラ38を位置決めカム36側へ弾発するばねである。
The
この苗植昇降レバー34には、クラッチカムアーム41が一体に設けられて、このクラッチカムアーム41によって苗植作業装置3への伝動のPTOクラッチ植付クラッチ(植付クラッチ)18のカムを押圧して、PTOクラッチ18の入り切りを行わせることができる。また、この苗植昇降レバー34にはバルブアーム42が設けられて、前記昇降制御弁23のスプールを押圧して、リフトリンク15を中立位置から下げ位置や上げ位置へ切替えするように操作できる。
The seedling raising / lowering
このような苗植昇降レバー34のアーム43と位置決めカム36と一体のアーム44との間に位置決め遊動機構59を構成するピン45とこれを嵌合する長穴46とが設けられる。ピン45をアーム44に固定し、長穴46をアーム43に形成している。軸35上のラックギヤ56と位置決めカム36との関係位置は、これらのアーム44,43間のピン45と長穴46とによって形成の遊動間隙を介して係合されるため、ラックギヤ56に対する位置決めカム36の回動位置が前後に移動することができ、位置決めカム36とカムローラ38との係合が一定の位置で係合されることとなる。このため、苗植昇降レバー6の位置は、位置決めカム36およびカムローラ38によって定位置に係止されることとなり、アクチュエータ24のモータの制御による苗植昇降レバー34のハンチングを防止することができる。
Between the
また、このとき位置決めカム36に作用するカムローラ38は、ばね40の弾発力で押圧されているため、一定位置までアクチュエータ24のモータで駆動される位置決めカム36は、ピン45の嵌合する長穴46のガタ分だけ先行して回動されるため、位置決めカム36が早く位置決めされて、より効果的にハンチングも防止できる。
At this time, since the
このような、アクチュエータ24のモータによる操作機構の駆動は、コントローラ26からの出力によって行われる。また、このコントローラ26の入力側には、操作スイッチや、センサスイッチ、制御プログラム等が入力される。操作スイッチとしては、前記昇降スイッチ4や、作業スイッチ5、下げスイッチ8、フィンガップレバー47の操作によるスイッチ48等があり、制御出力としては、エンジンスイッチ50のOFFによる場合があり、センサスイッチによる場合としては、苗植作業装置3が下降されて苗植作業位置にあることを検出するセンタフロート30の接地による接地センサ32、リフトリンク15の昇降位置を検出するリフトリンクセンサ33、バックリフト入切レバーの入りにおける後退制御の後進位置センサ49入りの場合等がある。また、前記操作位置はラックギヤ56の回動位置を検出するからなるアクチュエータセンサ51がブラケット52に取付けられる。該ラックギヤ56と一体に回動される伸縮自在のアーム53の先端が、アクチュエータセンサ51のセンサアーム54のピン溝に係合されて、ラックギヤ56と共にアーム53が回動されると、これに係合されるセンサアーム54が回動されて、アクチュエータセンサ51がこのラックギヤ56の回動角度を検出する。
The driving of the operation mechanism by the motor of the
このような苗植昇降レバー34や、アクチュエータ24による操作を説明する。苗植昇降レバー34による操作では、クラッチカムアーム41やバルブアーム42が回動されて、PTOクラッチ18や昇降制御弁23が作動されて、中立位置Nから下げ植付切位置A、および下げ植付入位置B、また、上げ位置Cへ切替えることができ、これらの各位置N,A,B,Cでは位置決めカム36の各係合位置にカムローラ38が係合される。このときアクチュエータ24は回転自在の状態にあってラックギヤ56の回動によってピニオン55が回転されても大きい抵抗とはならない。また、アクチュエータセンサ51も回動されているため、操作位置をコントローラ26に入力させて変速レバー1の近くに設けられるインジケータ58に表示できる状態にある。
The operation by such a seedling raising / lowering
すなわち、中立位置Nでは、苗植作業装置3は昇降されないで、苗植作業装置3へのPTOクラッチ18も切りの状態にある。下げ植付切位置Aでは、苗植作業装置3は下降されるが、このPTOクラッチ18が切りにあって苗植を行うことはできない。下げ植付入位置Bでは、苗植作業装置3は下降されていて、このPTOクラッチ18が入りにあって苗植を行うことができる。また、上げ位置Cでは、苗植作業装置3が非苗植位置へ上昇して、このPTOクラッチ18も切りの状態にある。 That is, in the neutral position N, the seedling planting device 3 is not lifted and the PTO clutch 18 to the seedling planting device 3 is also in a disconnected state. At the lower planting cut position A, the seedling planting device 3 is lowered, but the PTO clutch 18 is in the cut state and seedling planting cannot be performed. In the lowered planting entry position B, the seedling planting work device 3 is lowered, and the PTO clutch 18 is in the state and seedlings can be planted. Further, at the raising position C, the seedling planting device 3 is raised to the non-seedling position, and the PTO clutch 18 is also in a disengaged state.
つぎに、アクチュエータ24の駆動によって、前記クラッチカムアーム41やバルブアーム42が作動されるが、このアクチュエータ24の操作には、操作スイッチ4,5,8,48による場合や、センサスイッチ49,32,33,51による場合、さらには、制御出力50による場合等がある。このうち操作スイッチによる場合として、前記フィンガップレバー47の操作によるときは、このフィンガップレバー47を上側に一回引き上げる毎にスイッチ48をONして、コントローラ26からの間欠的出力でアクチュエータ24を一定出力回動させて、バルブアーム42や位置決めカム36等を一ピッチ毎上昇方向へ回動させる。この一ピッチは、この位置決めカム36におけるカムローラ38の各係合位置間隔として設定している。また、逆にフィンガップレバー47を下側へ一回押し下げる毎にバルブアーム42や位置決めカム36等を一ピッチ毎下降方向へ回動させる。
Next, the
つぎに、センサスイッチによる場合として、バックリフト入切レバー57を入り位置に操作している場合に、主変速レバー1が後進位置に操作されたことを後進位置センサ49が検出することによって、アクチュエータ24が駆動されて昇降制御弁23を上げ位置Cへ切替える。
Next, as a sensor switch, when the back lift on / off lever 57 is operated to the on position, the reverse position sensor 49 detects that the
さらに、制御出力による場合として、エンジンスイッチ50をOFFにすることによって、アクチュエータ24を駆動して昇降制御弁23を中立位置Nに切替えて、苗植作業装置3を中立位置とする。これにより、エンジン始動時には常に苗植昇降レバー34が中立位置Nとなり、エンジン始動時に不意に苗植作業装置3が駆動したり昇降したりするのを防止できる。
Further, as a case of control output, by turning off the engine switch 50, the
なお、前記フロート接地センサ32の接地によって苗植作業装置3を上下動して、苗植深さを一定に制御する場合は、下げ植付入位置Bにおいて行われるために、アクチュエータ24の駆動による場合とは別系路の構成で行われる。
When the seedling planting device 3 is moved up and down by the grounding of the float grounding sensor 32 and the seedling planting depth is controlled to be constant, since it is performed at the lowered planting position B, the
主として図8において、上例と異なる点は、変速レバー1のグリップ2上端面に昇降スイッチ4を操作する上昇釦6と下降釦7とを設ける。このうち下降釦7を押して作業装置3の下動中に、上昇釦6を押すと一時下動が停止し、再度下降釦7を押すと再度下動されるようにコントローラ26のプログラム構成とする。又、この下降釦7の押しによって下動中に上昇釦6を二回連続して押すときは上昇される。又、前記一時下動の停止時に上昇釦6を押すと上昇される。さらに、下降釦7を押して下降させて、もう一度下降釦7を押すとPTOクラッチ18を入りにして苗植付作業を行わせる。62は変速レバー1の支軸、63はHST11との連動リンクである。
8 mainly differs from the above example in that an up
このような操作形態に構成する場合は、苗植作業装置3を低くして畦際に寄せるとき有効で、操作をし易くするものである。 In the case of configuring in such an operation mode, it is effective when the seedling planting device 3 is lowered and brought close to the heel and facilitates the operation.
1:変速レバー、2:グリップ部、3:苗植作業装置、4U:上昇スイッチ、4D:下降スイッチ、8:下げ釦、9:車体、10:エンジン、11:変速装置(油圧無段変速装置)、13:前車輪、14:後車輪、17:PTO軸、18:PTOクラッチ、23:昇降制御弁、24:アクチュエータ、36:位置決めカム、38:カムローラ、45:ピン、46:長穴、50:エンジンスイッチ、55:ピニオン、56:ラックギヤ、59:位置決め遊動機構 DESCRIPTION OF SYMBOLS 1: Shift lever, 2: Grip part, 3: Seedling planting device, 4U: Up switch, 4D: Down switch, 8: Down button, 9: Vehicle body, 10: Engine, 11: Transmission (hydraulic continuously variable transmission) ), 13: front wheel, 14: rear wheel, 17: PTO shaft, 18: PTO clutch, 23: lift control valve, 24: actuator, 36: positioning cam, 38: cam roller, 45: pin, 46: oblong hole, 50: Engine switch, 55: Pinion, 56: Rack gear, 59: Positioning mechanism
Claims (1)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006275225A JP4462256B2 (en) | 2006-10-06 | 2006-10-06 | Seedling planting machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006275225A JP4462256B2 (en) | 2006-10-06 | 2006-10-06 | Seedling planting machine |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000274859A Division JP4310449B2 (en) | 2000-09-11 | 2000-09-11 | Mobile farm machine |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007000153A JP2007000153A (en) | 2007-01-11 |
| JP2007000153A5 JP2007000153A5 (en) | 2008-12-25 |
| JP4462256B2 true JP4462256B2 (en) | 2010-05-12 |
Family
ID=37686305
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006275225A Expired - Fee Related JP4462256B2 (en) | 2006-10-06 | 2006-10-06 | Seedling planting machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4462256B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010215133A (en) | 2009-03-18 | 2010-09-30 | Central Glass Co Ltd | Decorative molding, and vehicle window glass with frame body |
| JP2012139133A (en) * | 2010-12-28 | 2012-07-26 | Mitsubishi Agricultural Machinery Co Ltd | Riding transplanter |
-
2006
- 2006-10-06 JP JP2006275225A patent/JP4462256B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007000153A (en) | 2007-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021054390A1 (en) | Work vehicle | |
| JP4325408B2 (en) | Seedling transplanter | |
| JP4310449B2 (en) | Mobile farm machine | |
| JP4569530B2 (en) | Rice transplanter | |
| JP4462256B2 (en) | Seedling planting machine | |
| JP2006304805A5 (en) | ||
| JP2007000153A5 (en) | ||
| JP4465861B2 (en) | Rice transplanter | |
| JP3901149B2 (en) | Farm machine operation device | |
| JP5174705B2 (en) | Transplanter | |
| JP5668723B2 (en) | Seedling transplanter | |
| JP4462240B2 (en) | Rice transplanter | |
| JP2013243949A5 (en) | ||
| JP2004121013A (en) | Auxiliary clutch operation structure for sulky rice transplanter | |
| JP5874807B2 (en) | Seedling transplanter | |
| JP3770758B2 (en) | Working vehicle lifting mechanism | |
| JP3759009B2 (en) | Working vehicle lifting mechanism | |
| JP4635547B2 (en) | Passenger rice transplanter | |
| JP7258704B2 (en) | work vehicle | |
| JP7258705B2 (en) | work vehicle | |
| JP4310475B2 (en) | Agricultural machine | |
| JP5236425B2 (en) | Transplanter | |
| JP2006254926A5 (en) | ||
| KR100376367B1 (en) | Seedling transplanter | |
| JP2005034071A (en) | Sulky working implement |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061010 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090407 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090608 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100126 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100208 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130226 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4462256 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160226 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |