JP4384189B2 - refrigerator - Google Patents
refrigerator Download PDFInfo
- Publication number
- JP4384189B2 JP4384189B2 JP2007031033A JP2007031033A JP4384189B2 JP 4384189 B2 JP4384189 B2 JP 4384189B2 JP 2007031033 A JP2007031033 A JP 2007031033A JP 2007031033 A JP2007031033 A JP 2007031033A JP 4384189 B2 JP4384189 B2 JP 4384189B2
- Authority
- JP
- Japan
- Prior art keywords
- door
- opening
- freezer compartment
- refrigerator
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Description
本発明は、冷蔵庫に関する。 The present invention relates to a refrigerator.
従来、冷蔵庫のドアを自動的に開放させる装置として、特許文献1から6に記載の構成がある。
Conventionally, there is a configuration described in
特許文献1には、高ギヤ比の短距離動作区間と、低ギヤ比の長距離動作区間とを備え、低ギヤ比部には過負荷防止クラッチを設け、パッキンを引き剥がす際に大きな力を発生し、その後は高速で開放する、という構成が開示されている。
特許文献2には、押圧部材をウォームギヤとラックによって直線運動させて、その押圧部材によって引出し扉を押し出して自動開放し、扉が開き終わると、復帰ばねで引込位置に復帰する構成が開示されている。
特許文献3には、引出し扉を支持する支持フレーム内にタイミングベルトを設け、タイミングベルト上を摺動する自動オープンユニットを設け、自動オープンユニットは、引出しケースを押し出すスライドピンと、タイミングベルト上を動作するローラと、スライドピンとローラを駆動させるための駆動手段からなる構成が開示されている。
In
特許文献4には、ウォームギヤを用いた減速ギヤの出力段にカム装置が設けられ、このカム装置の開閉扉への当接部が円弧状であり、駆動モータへの一定時間の通電による回転動作によって、冷蔵庫本体から扉側に突出して扉を開放する構成が開示されている。 In Patent Document 4, a cam device is provided at an output stage of a reduction gear using a worm gear, and a contact portion of the cam device with an opening / closing door has an arc shape, and a rotation operation is performed by energizing a drive motor for a certain period of time. The structure which protrudes from the refrigerator main body to the door side and opens the door is disclosed.
特許文献5には、扉開放スイッチからの信号により駆動装置を介してカムを回転させることにより、カムの長径部端面が前方に突出して扉を開放する、円と楕円を組み合わせた形状または楕円形状をなすカム装置の構成が開示されている。
特許文献6には、引出し扉の後方に出力軸にカムを設けた電動機を備え、カムの回動によりフレームを押し出し、さらにカム位置検知用のマイクロスイッチを備え、マイクロスイッチの作動によりカムを所定位置に停止させる構成が開示されている。
近年では食生活が変化してきており、毎日の食材をこまめに近隣の食品店で購入して調理する食生活から、郊外の大型スーパーマーケット等で食品を一週間分まとめて購入し、冷蔵庫に貯蔵するようなスタイルが一般化しつつある。また、冷凍食品の利用が増えたことに対応して家庭でも400リットルを超える容量の大型冷蔵庫が一般的に普及してきている。 In recent years, the eating habits have changed, and from daily eating of daily ingredients at nearby food stores, food is purchased for a week at large supermarkets in the suburbs and stored in the refrigerator. Such a style is becoming common. In response to the increase in the use of frozen foods, large refrigerators with a capacity exceeding 400 liters are generally spreading at home.
しかし、冷蔵庫の大型化に伴って収納される食品の量も増え、冷凍室や野菜室には例えば20kg以上の食品を保管するので、野菜室や冷凍室の引出し扉を開く際に要する力が大きくなってしまう。 However, as the size of the refrigerator increases, the amount of food stored increases, and for example, 20 kg or more of food is stored in the freezer compartment or vegetable compartment. Therefore, the force required to open the drawer door in the vegetable compartment or freezer compartment is increased. It gets bigger.
特に、冷蔵庫の扉には冷気もれを防止するためにマグネット吸着式のパッキンが扉の全周にわたって設けられており、扉の開き始めには、引出しレールの負荷抵抗に加え、冷蔵庫本体に吸着しているマグネットパッキンを引き剥がす力を要する。そのため、高齢者等の手指の力が弱い人にとっては、冷蔵庫の引出し扉を開く動作は過度の負担となる。 In particular, the door of the refrigerator is provided with a magnet adsorption type packing over the entire circumference of the door to prevent cold air leaks, and in addition to the load resistance of the drawer rail, it is adsorbed to the refrigerator body at the beginning of the door opening. It requires a force to peel off the magnet packing. For this reason, the operation of opening the drawer door of the refrigerator is an excessive burden for a person with weak finger strength, such as an elderly person.
また、冷蔵庫の扉を閉じる際、閉め方が不十分な所謂半ドア状態になると、冷気が外部にもれて冷却機能が失われ、省エネ効果の低下や、庫内貯蔵食品の品質劣化等の問題がおきる。さらに、冷蔵庫外の外気が庫内に侵入して結露し、庫内に水滴が付着してしまう。また、電気代が余計にかかってしまうことも問題である。 In addition, when the refrigerator door is closed, if it is in a so-called half-door state where the closing method is insufficient, the cooling air is lost to the outside, the cooling function is lost, the energy saving effect is reduced, the quality of the food stored in the warehouse is deteriorated, etc. Problems arise. Furthermore, outside air outside the refrigerator enters the inside of the cabinet and causes condensation, and water droplets adhere to the inside of the cabinet. Another problem is that the cost of electricity is excessive.
また、冷蔵庫の扉を閉じるとき、全閉状態に至る近傍、一例として開き量が残り50
mm程度にまで閉じられた際は、ばね等の力によって扉を引き込むクローザ機構を備えた構成が一般的である。
Moreover, when the door of the refrigerator is closed, the opening amount remains in the vicinity of the fully closed state, for example, 50%.
A configuration provided with a closer mechanism that pulls the door in by a force of a spring or the like when closed to about mm is common.
冷蔵庫の扉を全閉状態から開く場合、マグネットパッキンの吸着力に抗する力、クローザ機構のバネの引張り力に抗する力、引出し全体(扉、収納容器、及び収納食品を含む)を停止状態から引開ける加速力(例えば秒速200mm程度までに必要な加速力)が必要となる。すなわち、これらの合力を扉に加えて開く必要がある。そのため、扉の全閉状態から開くときが、一連の扉開動作の中で最も大きな力を要する。これを「第一の力」と称する。 When the refrigerator door is opened from the fully closed state, the force against the magnetic packing adsorption force, the force against the pulling force of the closer mechanism spring, and the entire drawer (including the door, storage container, and stored food) are stopped. Acceleration force (for example, acceleration force required up to about 200 mm per second) is required. That is, it is necessary to open these combined forces on the door. Therefore, when the door is opened from the fully closed state, the greatest force is required in a series of door opening operations. This is referred to as “first force”.
扉を10mm程度引き開けた後は、マグネットパッキンと本体との吸着が引き剥がされる。そのため、引出し動作に要する力は、クローザ機構のもつバネの引張り力に抗する力と、引出し全体を開放方向へ加速する加速力との合力である。これを「第二の力」と称する。 After opening the door about 10 mm, the adsorption between the magnet packing and the main body is peeled off. Therefore, the force required for the drawer operation is a resultant force of a force that resists the tension force of the spring of the closer mechanism and an acceleration force that accelerates the entire drawer in the opening direction. This is referred to as “second force”.
クローザ機構による扉閉鎖方向への引張り力がはたらく範囲が、一例として扉の閉鎖状態から50mmとすると、その範囲では第二の力が必要となる。 When the range in which the pulling force in the door closing direction by the closer mechanism works is 50 mm from the door closed state as an example, the second force is required in that range.
さらに開き動作を継続して扉が50mm以上開いた後は、クローザ機構は作用せず、引出しに加える力は開放方向への加速力と、引出しをスライドするためのスライドレールとの間で生じる摩擦力のみとなる。これを「第三の力」と称する。第三の力は第一の力や第二の力に比べて、僅かな力となる。ここで、50mm程度開いた時点で引出しが開放速度に達したとすれば、第三の力はスライドレールとの間で生じる摩擦力に抗する力のみで十分となる。 Furthermore, after the opening operation is continued and the door is opened more than 50 mm, the closer mechanism does not work, and the force applied to the drawer is the friction generated between the acceleration force in the opening direction and the slide rail for sliding the drawer. Only power. This is referred to as a “third force”. The third force is a slight force compared to the first force and the second force. Here, if the drawer reaches the opening speed when it is opened by about 50 mm, the third force is sufficient only to resist the frictional force generated with the slide rail.
冷蔵庫の引出し扉を開く際には、上述したように開き始めが特に重く、ある程度(一例として50mm等)開いた後は僅かな力でよい、という特性がある。 When opening the drawer door of the refrigerator, the opening is particularly heavy as described above, and after opening to a certain extent (for example, 50 mm), there is a characteristic that a slight force is sufficient.
本発明は、上記のような冷蔵庫の引出し扉を引出す際の力の特性に適合した、冷蔵庫引出し扉開閉装置を提供することを目的とする。 It is an object of the present invention to provide a refrigerator drawer door opening / closing device adapted to the characteristics of the force when pulling out the drawer door of the refrigerator as described above.
また、扉の開放速度について、マグネットパッキンを引き剥がす時は、停止状態から動き始めるため、第一の力の範囲で速度はごく小さくてよい。一方、第二、第三の力の範囲まで引出し扉を開き続けたときに、扉が次第に加速するような動作とすれば、ユーザが引出し扉を手動で引張る際の動作に近く、自然な動作となる。 Further, regarding the opening speed of the door, when the magnet packing is peeled off, the movement starts from the stop state, and therefore the speed may be very small within the range of the first force. On the other hand, when the drawer door is opened to the range of the second and third forces and the door is gradually accelerated, it is close to the action when the user manually pulls the drawer door, and it is natural. It becomes.
本発明は、さらに上記のような冷蔵庫の引出し扉を引出す際の速度の特性に適合した、冷蔵庫引出し扉開閉装置を提供することを目的とする。 Another object of the present invention is to provide a refrigerator drawer door opening / closing device adapted to the speed characteristics when the refrigerator drawer door is pulled out as described above.
また、引出し扉を開く際に扉が完全に開くまで開き力が加わり続ける構成の場合、扉の直前にユーザが立っていたり、あるいは物が置いてあったりすると、それらに引出し扉が当たった後も、開き力が加わり続けて危険である。したがって、引出し扉を開く際には、駆動力を加え続けるのではなく、開き始めの短い範囲だけ駆動力を加え、その後は駆動力の範囲で得た初速が、スライドレールのもつ摩擦力によって徐々に減速しながら停止する、所謂惰性による動作が安全である。 In addition, when opening the drawer door, if the opening force continues to be applied until the door is fully opened, if the user stands or objects are placed in front of the door, after the drawer door hits them However, it is dangerous because the opening force continues to be applied. Therefore, when the drawer door is opened, the driving force is not applied continuously, but the driving force is applied only for a short range at the beginning of opening. Thereafter, the initial speed obtained in the driving force range is gradually increased by the frictional force of the slide rail. The operation by so-called inertia which stops while decelerating is safe.
さらに、停電など扉開閉装置が動作しない状況の場合には、手動により引出しを開閉することになるので、冷蔵庫引出し扉開閉装置が、手動による開閉動作の妨げや、負荷にならない構成とすることが望ましい。 Furthermore, in the situation where the door opening and closing device does not operate, such as a power failure, the drawer is manually opened and closed, so the refrigerator drawer door opening and closing device may be configured not to interfere with the manual opening and closing operation or to become a load. desirable.
特許文献1においては、短ストロークの扉押出し手段と長ストロークの扉押出し手段とが必要であり、複雑な構成となる。
In
特許文献2においては、ウォームとラックを用いた構成を開示している。しかし、引出し扉を開く速度はラックの動作速度と一定になる。そこで、マグネットパッキン引き剥がしに要する力を出力可能にするためには、減速比を大きくする必要がある。そのため、動作速度が遅く、また、扉閉機能については備えていない。
In
特許文献3においては、引出しケースを開いた後に駆動手段を逆転させ歯車の噛み合いを外す構成が開示されている。しかし、引出しを一部だけ開いた状態で歯車の噛み合いを外す構成や動作については述べられておらず、また扉を閉じる機能は備えていない。
特許文献4、特許文献5、特許文献6においては、円弧状または楕円形状をなす回転自在なカムを備え、扉開放スイッチからの信号を受けるとカムを回転させて、カムの長径部端面が前方に突出することで扉を開放するカム装置が開示されている。しかし、この構成では、カムが回転した際の扉の開き量は、カムの回転に伴うカム半径の変化分のみである。よって、扉開方向に与えられる速度は小さくなり、扉の開き量を大きくすることには限界がある。
In Patent Document 4,
上記課題を解決するために、本発明の目的は、冷蔵庫の引出し扉の開き力を低減して軽快に扉を開放でき、かつ所謂半ドア状態から自動的に扉を閉鎖して省エネ効果を向上できる冷蔵庫の引出し扉開閉装置を提供することである。 In order to solve the above problems, the object of the present invention is to reduce the opening force of the drawer door of the refrigerator so that the door can be opened easily, and the door is automatically closed from the so-called half-door state to improve the energy saving effect. It is to provide a drawer door opening and closing device for a refrigerator.
上記目的を達成する為に、本発明の態様の冷蔵庫は、冷蔵庫本体に区画形成された貯蔵室と、前記貯蔵室に設けられ開閉可能な引出し扉と、前記貯蔵室に設けられ前記引出し扉を開閉させる駆動手段と、前記駆動手段にて回転可能であり、且つ回転方向に向かって回転中心からの距離を除々に変化させた位置に複数の駆動伝達部材が設けられた回転部材と、前記引出し扉又は該引出し扉とともに前後方向に引出すことができる収納部の下面に設けられ、且つ前記駆動伝達部材から動力が伝達されて前記回転部材の回転運動を直線運動に変換させる連結部材と、前記引出し扉が閉鎖されていることを検知する扉閉検知手段を備え、前記扉閉検知手段が前記引出し扉が閉鎖状態であることを検知するまで、所定回数、前記駆動伝達部材が前記連結部材に当接するように前記回転部材を回転駆動させることを特徴とする扉駆動装置を備えたことを特徴とする。 In order to achieve the above object, a refrigerator according to an aspect of the present invention includes a storage compartment defined in a refrigerator main body, a drawer door provided in the storage compartment and openable and closable, and a drawer door provided in the storage compartment. A driving means that opens and closes, a rotating member that is rotatable by the driving means, and that is provided with a plurality of drive transmission members at positions where the distance from the rotation center is gradually changed in the rotation direction; and the drawer A connecting member that is provided on the lower surface of the storage unit that can be pulled out in the front-rear direction together with the door or the drawer door, and that transmits power from the drive transmission member and converts the rotational motion of the rotating member into linear motion; and the drawer comprising a Tobira閉detection means for detecting that the door is closed, before Kitobira閉to the detection means detects that the drawer door is closed, a predetermined number of times, the drive transmission member is the connecting Characterized by comprising a door driving device, characterized in that said rotary member is rotated so as to abut against the wood.
また、前記扉閉検知手段が前記引出し扉が閉鎖状態であることを検知するまで、前記駆動伝達部材が前記連結部材に当接するように前記回転部材を所定時間回転駆動させて、前記駆動伝達部材が前記連結部材と離反するように前記回転部材を所定位置まで回転駆動させることを所定回数繰り返す扉駆動装置を備えたことを特徴とする。 Further, until the door closing detection means detects that the drawer door is in a closed state, the drive transmission member is rotated for a predetermined time so that the drive transmission member abuts on the connecting member , and the drive transmission member And a door driving device that repeats a predetermined number of times to rotate the rotating member to a predetermined position so as to be separated from the connecting member .
また、前記回転部材の回転位置を検知する回転検知手段を備え、前記回転検知手段が前記回転部材が所定位置にあることを検知するまで、前記駆動伝達部材が前記連結部材から離反する方向に前記回転部材を回転駆動させることを特徴とする扉駆動装置を備えたことを特徴とする。 In addition, rotation detection means for detecting the rotation position of the rotation member is provided, and the drive transmission member moves away from the connection member until the rotation detection means detects that the rotation member is at a predetermined position. A door driving device characterized in that the rotating member is driven to rotate is provided.
また、扉が開放していることを報知する報知手段を備え、前記扉閉検知手段が前記引出し扉が閉鎖状態であることを検知するまで、前記駆動伝達部材が前記連結部材に当接するように前記回転部材を所定時間回転駆動させて、前記駆動伝達部材が前記連結部材と離反するように前記回転部材を所定位置まで回転駆動させることを所定回数繰り返して、報知手段を作動させることを特徴とする扉駆動装置を備えたことを特徴とする。 In addition, an informing means for informing that the door is open is provided so that the drive transmission member abuts on the connecting member until the door closing detecting means detects that the drawer door is in a closed state. And rotating the rotating member for a predetermined time to rotate the rotating member to a predetermined position so that the drive transmission member is separated from the connecting member, and repeating the predetermined number of times to operate the notifying means. A door drive device is provided.
また、貯蔵室の底壁に凹形状に設けられた凹部と、前記凹部に配設され上方が開口した下ケースと、前記下ケースの開口を閉鎖するように下ケースと接合される上ケースとを備え、前記上ケースにはリード線引出し部が設けられ、前記上ケースと前記下ケースとで形成される空間に前記駆動装置が配設され、前記上ケースと前記下ケースの接合部は貯蔵室の底壁よりも上方にある扉駆動装置を備えたことを特徴とする。 A concave portion provided in a concave shape on the bottom wall of the storage chamber; a lower case disposed in the concave portion and opened upward; an upper case joined to the lower case so as to close the opening of the lower case; The upper case is provided with a lead wire lead-out portion, the driving device is disposed in a space formed by the upper case and the lower case, and the joint between the upper case and the lower case is stored A door driving device is provided above the bottom wall of the chamber.
また、前記下ケース内には上方に延伸した仕切壁を有し、前記仕切壁は前記駆動装置を囲繞するように配設されることを特徴とすることにより、冷蔵庫の引出し扉の開き力を低減して電動で軽快に引出し扉を開放することを可能にするとともに、所謂、半ドア状態から自動的に電動で引出し扉を閉鎖して省エネ効果を向上できる。 Further, the lower case has a partition wall extending upward, and the partition wall is disposed so as to surround the driving device, thereby reducing an opening force of the drawer door of the refrigerator. It is possible to reduce the electric power and open the drawer door easily and electrically, and from the so-called half-door state, the drawer door can be automatically and electrically closed to improve the energy saving effect.
また、物などが挟まり連結部材の進行を阻止する事態となった場合には、使用者は警報で半ドア状態を回避することが出来、省エネ効果が得られる冷蔵庫を提供できる。 In addition, when an object or the like is caught and the connection member is prevented from progressing, the user can avoid the half-door state by an alarm, and can provide a refrigerator that can save energy.
また、貯蔵室底面に水が溜まるような事故が発生しても駆動手段が設けられたケース内に水が浸入し損傷することを防止できる。 Further, even if an accident occurs in which water accumulates on the bottom surface of the storage chamber, water can be prevented from entering and being damaged in the case provided with the driving means.
本発明によれば、冷蔵庫の引出し扉の開き力を低減して軽快に扉を開放でき、かつ所謂半ドア状態から扉を閉鎖して、省エネ効果および信頼性を向上できる冷蔵庫を提供するものである。 According to the present invention, there is provided a refrigerator that can open the door lightly by reducing the opening force of the drawer door of the refrigerator and can improve the energy saving effect and reliability by closing the door from a so-called half-door state. is there.
本発明の実施の形態について、以下図面に基づいて説明する。 Embodiments of the present invention will be described below with reference to the drawings.
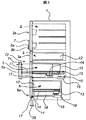
(冷蔵庫の全体構成)図1は本発明による冷蔵庫の斜視図であり、図2は縦断面図である。図1および図2において、冷蔵庫本体1は複数の収納室に分割されており、最上部は冷蔵室2であり、その前面には冷蔵室扉2aが設けられている。図1は、一例として左右両側に開く所謂フレンチドアを示している。冷蔵室2の下方は左右に分割区画された収納室となっており、例えばその一方は機能切り替え室3となっており、もう一方は図示しない自動製氷装置によって製作された氷を貯蔵する製氷室4となっている。そして、夫々の前面には切り替え室扉3a、製氷室扉が設けられている。さらにその下方には、手前に引出して開放可能な冷凍室扉5aを前面に備えた、冷凍室5となっている。冷凍室5の下方は、同様に引出し可能な野菜室扉6aを前面に備えた、野菜室6となっている。
(Overall structure of refrigerator) FIG. 1 is a perspective view of a refrigerator according to the present invention, and FIG. 2 is a longitudinal sectional view thereof. 1 and 2, the refrigerator
冷蔵室の扉には操作表示部7が備えられており、冷凍室の開スイッチ8aと野菜室の開スイッチ8bとが備えられている。ユーザが前記のスイッチを押して引出しの開動作を指示できる構成である。ここで、冷凍室5が野菜室6より上方に設けられている場合には、冷凍室の開スイッチ8aを野菜室の開スイッチ8bの上方に設けるのがよい。すなわち、扉の位置関係と同様に設けておけば、開スイッチ8の操作性が向上し好適である。
An
(扉自動開閉機構)以下、冷凍室5を例に扉開閉装置10について説明する。なお、以下の説明は、野菜室6の扉開閉装置10においても、同様である。
(Automatic Door Opening / Closing Mechanism) The door opening /
冷凍室5の目前面の扉体5aと、食品を収納する容器12は、容器12の左右に設けられたスライドレール11によって手前に引出し自在に支持されている。スライドレール
12の奥側には前記冷凍室5を閉鎖方向に引き込むクローザ13(閉じ付勢手段)が設けられている。これにより、一旦開いた冷凍室5を閉じる際、例えば開き量が40mm以下のとき、図示しないばね力にて奥側に引き込むように付勢して、冷凍室5の全周に設けられたマグネットパッキン14が、冷蔵庫本体1と吸着するまで冷凍室5を閉じる動作を補助する。
The
冷凍室5の内部には扉開閉機構10が設けられている。扉開閉装置10は、冷蔵庫本体1に設けられた駆動機構15と、容器12の奥側下面に設けられた連結板16からなる。駆動機構15は、駆動源であるモータと、モータの回転を減速する減速機構を備える。この駆動機構15から連結板16に対して、スライドレール11における移動方向の力が加えられることで、冷凍室5の扉5aが開閉される。冷凍室5の正面側にはドア検知17が設けられており、冷凍室5が閉鎖されているか、あるいは冷凍室5の開き量が、所定量
(後述する、開き量35)以内であるか否かを検出して、制御回路に信号を送る。
A door opening /
(駆動伝達部材)次に、駆動機構15と連結板16とを備えた扉開閉装置10の構成について、図3から図5を用いて説明する。ここで、扉開閉装置10は冷凍室5に設けられているものとして説明する。なお、野菜室6の扉開閉装置10も同様の構成である。
(Drive transmission member) Next, the structure of the door opening and
図3は駆動機構15と連結板16とを備えた扉開閉装置10を、図2の上方からみた平面図である。図4と図5は駆動機構15の内部構成の一例を示す斜視図である。
FIG. 3 is a plan view of the door opening /
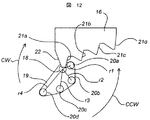
駆動機構15においては、回転出力軸である駆動軸18の周りに回転自在に回転部材である回転板19が軸支されており、回転板19には駆動伝達部材である駆動ピンが備えられている。本実施例においては、回転板19に凸状部材である駆動ピンが略円周上に3本設けられている。駆動軸18からの距離r1に第一の駆動ピン20a、距離r2に第二の駆動ピン20b、距離r3に第三の駆動ピン20cが設けられている。それぞれの駆動ピンは円筒形状をなし、かつ駆動ピンの中心軸が駆動軸18の回転中心軸と略平行となるように回転板19に立設している。ここで、r1<r2<r3とする。
In the
本実施例において回転板19は、冷凍室5を開放する際には矢印CCW方向(図3においては、反時計回り)に回転する。連結板16は冷凍室5の引出し扉と連動して引出されるように設けられているので、スライドレール11に沿って矢印23方向に移動自在である。なお、図3は、左側を冷蔵庫本体の正面側としており、連結板16が左方向に移動することで冷凍室5は開く。
In this embodiment, the rotating
連結板16には、冷凍室5を開放する際に第一の駆動ピン20aが接する第一の受け面21a、第二の駆動ピン20bが接する第二の受け面21b、第三の駆動ピン20cが接する第三の受け面21c、とが備えられている。受け面は、連結板16の端部に夫々C字形状に設けられ、かつこれら受け面が階段状に連なって構成されている。なお、駆動ピンと受け面21との動作時の詳細な説明は後述する。
The connecting
図4および図5において、モータ24の回転軸にはモータピニオン25が設けられており、アイドラ26と噛み合って減速される。アイドラ26とアイドラピニオン27は一体で回転し、アイドラピニオン27はアイドラ28と噛み合っている。アイドラ28とアイドラピニオン29は一体で回転し、アイドラピニオン29は駆動ギヤ30と噛み合って減速される。駆動軸18と駆動ギヤ30は連結されており、このようなギヤの構成によりモータ24の回転速度は、例えば1/100程度に減速され、駆動軸18に設けられた回転板19を回転させる。本実施例においては、アイドラ28とアイドラピニオン29との間にはトルク制限手段31が設けられる。これにより、回転板16に過大な外力が加えられた場合、トルク制限手段31が介在してアイドラ28とアイドラピニオン29とが互いに滑るため、駆動機構15の破損を防止できる。また、駆動軸18には回転検知手段32を設けて駆動軸18の回転位置を検出できる構成としている。このような回転検知手段32として、軸の回転によってその抵抗値が変化する可変抵抗器がある。
4 and 5, a
(扉開放動作)次に、本発明による扉開閉装置10により冷凍室扉5aを開く際の動作について、図6にて説明する。図6は本発明による扉開閉装置10が冷凍室5を開放する際の動作を示す図である。(a)は冷凍室5が閉じている状態を示しており、(b)(c)(d)(e)の順に動作することで、冷凍室扉5aを開放する動作を示している。回転板19は駆動軸18のまわりに回転自在に設けられ、連結板16は図示左右方向に移動自在に支持されている。連結板16は冷凍室の容器12の下方に備えられており、連結板16の左方向への動きが冷凍室5における開き動作を示している。ここで、冷凍室5が閉じた状態の連結板16の位置を示す基準線を、引き込み位置34として示す。
(Door Opening Operation) Next, the operation when the
(b)の状態において、回転板19は矢印CCW方向(図6においては反時計回り)に回転し、第一の駆動ピン20aが第一の受け面21aと接し、連結板16に対して矢印
23a方向に付勢する。このとき、第一の駆動ピン20aは駆動軸18から図3に示した距離r1の位置にあるので、第一の駆動ピン20aから連結板16に伝えられる力は、駆動軸18に加わるトルクをTとすれば、T/r1となる。この力を、冷凍室5のマグネットパッキンを引き剥がす力に抗する力と、クローザ13による引込力に抗する力と、冷凍室5の自重および収納された食品の質量を加速する力との合力以上となるように設定することで、マグネットパッキンの吸着を引き剥がして、連結板16は冷凍室5とともに図示左方向に移動して、冷凍室5は開き始める。
In the state of (b), the rotating
さらに回転板19がCCW方向に回転した(c)の状態においては、第二の駆動ピン
20bが第二の受け面21bと接し、第一の駆動ピン20aは第一の受け面21aからは離反する。すなわち、第二の駆動ピン20bは駆動軸18から図3に示した距離r2の位置にあり、かつr2>r1である。これにより、第一の駆動ピン20aよりも第二の駆動ピン20bが回転中心である駆動軸18から離れた距離に位置するため、周速が速い。そのため、第二の駆動ピン20bが第二の受け面21bと当接した後は、第一の駆動ピン
20aは第一の受け面21aからは離反するのである。この状態において、第二の駆動ピン20bは第二の受け面21bに接して、矢印23bの力を与える。このとき、第二の駆動ピン20bは駆動軸18から図3に示した距離r2の位置にあるので、第二の駆動ピン20bから第二の受け面21bを介して連結板16に伝えられる力は、駆動軸18に加わるトルクをTとすれば、T/r2となる。この力は、図6(b)の状態で第一の駆動ピン20aが連結板16に加える矢印23a方向の力よりも小となる。マグネットパッキンは既に引き剥がされているので、このときに加わる力はクローザ13による引張り力に抗する力と、冷凍室5の自重および収納された食品の質量をさらに加速する力の合力よりも大なるように設定すればよい。連結板16は冷凍室5と共にさらに図示左方向に移動して、冷凍室5の開き動作を継続する。
Further, in the state (c) in which the
さらに回転板19がCCW方向に回転した(d)の状態においては、第三の駆動ピン
20cが第三の受け面21cと接し、第二の駆動ピン20bは第二の受け面21bから離反する。すなわち、第三の駆動ピン20cは駆動軸18から図3に示した距離r3の位置にあり、かつr3>r2である。これにより、第二の駆動ピン20bよりも第三の駆動ピン20cの方が回転中心である駆動軸18からの距離が離れているので、周速が速い。そのため、第三の駆動ピン20cが第三の受け面21cと当接した後は、第二の駆動ピン
20bは第二の受け面21bからは離反するのである。この状態において、第三の駆動ピン20cは第三の受け面21cに接して、矢印23cの力を与える。このとき、第三の駆動ピン20cは駆動軸18から図3に示した距離r3の位置にあるので、第三の駆動ピン20cから第三の受け面21cを介して連結板16に伝えられる力は、駆動軸18に加わるトルクをTとすれば、T/r3となる。この力は図6(c)の状態で第二の駆動ピン
20bにより連結板16に加える矢印23b方向の力よりもさらに小となる。冷凍室5は既に矢印23cの扉開放方向に移動しているので、冷凍室5は容器と収納された食品も含めた自重と速度に応じた運動量をもっている。その運動量と第三の駆動ピン20cから連結板16の第三の受け面21cに伝達される力とによって、クローザ13による引張り力に抗して開き動作を継続することができる。
Further, in the state (d) in which the
さらに回転板19がCCW方向に回転した(e)の状態においては、第三の駆動ピン
20cが第三の受け面21cからほぼ離反する状態を示している。図6(a)の状態から図6(e)の状態に至るまでの連結板16の移動量33の範囲は、連結板16が駆動ピン20から力を受ける範囲、すなわち開き駆動範囲ということになる。ここで、この連結板16の移動量33は、クローザ13による引込量である閉じ付勢範囲よりも、大きくなるように設定すると好適である。すなわち、閉じ付勢範囲(クローザ13による引き込みストローク)が40mmの場合、連結板16の移動量33が一例として50mmであれば、開動作直後にクローザ13がはたらいて冷凍室5が閉じてしまうことを防止できる。
Further, in the state (e) in which the
ただし、連結板16が図6(e)の移動量33よりも左方に多く移動すると、連結板
16は、もはや駆動ピンから駆動力は受けない。しかし、冷凍室5全体は図6(a)から(e)の動作によって、矢印23d方向への速度を持っている。そのため、スライドレール11のもつ摩擦負荷によって減速して停止するまでは、開き動作は継続される。このように動作するので、冷凍室5の開き量は連結板16の移動量33よりも大きくなる。
However, if the connecting
上記説明したように、冷凍室5の開き動作時には開き方向への駆動力を加え続けるのではなく、開き始めの短い範囲だけ駆動力を加え、その後は駆動力付与範囲で得た移動速度が、スライドレールのもつ摩擦力によって徐々に減速して停止する動作となる。これにより、扉の直前にユーザが立っていた場合、あるいは物が置いてあった場合に、冷凍室扉
5aが当たったとしても、扉開閉機構10からの開き方向への力は、もはや加わっていないので安全である。
As described above, during the opening operation of the
以上説明したように、冷凍室5を閉鎖状態から開き始める際、駆動軸18のもっとも近傍に配置された第一の駆動ピン20aが連結板16を押し出すことにより、低速で大きな力(第一の力)を発する。これにより、マグネットパッキンを引き剥がす。
As described above, when the
次いで、第一の駆動ピン20aよりも遠方に設けられた第二の駆動ピン20bが連結板16を押し出すことにより、中程度の速度で中程度の力(第二の力)を発する。これにより、クローザ13の引込力に抗する開き動作を継続して冷凍室5を加速する。
Next, the
さらに、第二の駆動ピン20bよりも駆動軸18から遠方に設けられた第三の駆動ピン20cが連結板16を押し出すことにより、高速で小さな力(第三の力)を発する。これにより、冷凍室5をさらに加速して、冷凍室5の開き動作を確実に行うことができる。
Further, the
本発明の構成は、駆動軸18と駆動ピンを結ぶ直線と、冷凍室5の開き方向23の直線とが略直交する位置で、連結板16に接して駆動力を与える。そのため、駆動ピンの速度は、回転板19の回転速度と、駆動軸18から駆動ピンまでの距離に比例する。
In the configuration of the present invention, a driving force is applied to the connecting
従来技術の扉の押し出し距離は、カムの回転中心から扉部の接点までにおける、半径の変化分のみであった。しかし、本構成は扉を押し出す速度を高速化できるため、開き始めの短い範囲だけ駆動力を加え、その後は駆動力の範囲で得た開き速度が、スライドレールのもつ摩擦力によって徐々に減速しながら停止する動作を実現できる。 In the prior art, the push-out distance of the door was only the change in radius from the rotation center of the cam to the contact point of the door. However, since this configuration can increase the speed at which the door is pushed out, a driving force is applied only in the short opening range, and then the opening speed obtained in the driving force range is gradually reduced by the frictional force of the slide rail. The operation to stop can be realized.
上記の動作により冷凍室5が開放された後、回転板19はさらにCCW方向への回転を継続し、図6(a)の状態に至って回転を停止する。なお、この際に連結板16は図6
(a)に示す位置ではなく、冷凍室5は開いているので図示左方に移動した状態である。
After the
Instead of the position shown in (a), the
本発明による扉開閉装置においては、回転板19は冷凍室5の開き動作を行った後に、同一方向への回転を継続し、一回転して冷凍室5を閉じた際の状態、すなわち図8にて説明した原点範囲に戻る。そのため、原点範囲への復帰を高速化できる。仮に回転板19が一方向への回転ではなく、冷凍室5の開き動作を行った後、一端停止してから逆方向に回転して原点範囲に復帰する構成の場合、本構成に比べて、原点範囲に戻るまでに時間がかかる。
In the door opening and closing apparatus according to the present invention, the rotating
(扉開き量計算)本発明の扉開閉機構により、冷凍室扉5aの開き量について説明する。
(Door Opening Calculation) With reference to the door opening / closing mechanism of the present invention, the opening of the
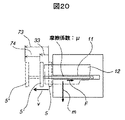
図20は、冷凍室5開放時における、開放速度と移動量との関係を示した図である。冷凍室5は扉開閉装置10によって、各駆動ピンから各押し面を介して開き方向に付勢され、移動量33の範囲まで開かれて、位置5′に達する。ここで、位置5′において冷凍室5は速度Vをもっている。その後、惰性開き量74の範囲では惰性によって開放方向へ移動を続け、徐々に減速して最終的に最大開き量73の位置5″まで移動して停止する。
FIG. 20 is a diagram showing the relationship between the opening speed and the movement amount when the
ここで、収容された食品を含めた冷凍室5の全体の質量をmとすれば、移動量33の位置における運動エネルギEは、
E=(m×V^2)/2 (式1)
となる。
Here, if the total mass of the
E = (m × V ^ 2) / 2 (Formula 1)
It becomes.
ここで、スライドレール11のもつ摩擦係数をμ、重力加速度をgとすれば、スライドレール11により生じる摩擦力Fは、
F=μ×m×g (式2)
となる。摩擦力により消費されるエネルギE2は、摩擦力Fと惰性開き量74(摩擦を受けながら移動した距離L)との積なので、
E2=L×F=L×μ×m×g (式3)
となる。ここで、元々冷凍室が持っていた運動エネルギが、停止するまでにすべて摩擦によって消費されたとすればE=E2なので、
(m×V^2)/2=L×μ×m×g (式4)
となる。両辺をmで割って、
(V^2)/2=L×μ×g (式5)
となる。ゆえに、惰性開き量74(すなわちL)は(式5)を変形して、
L=(V^2)/(2×μ×g) (式6)
として表される。
Here, if the friction coefficient of the
F = μ × m × g (Formula 2)
It becomes. The energy E2 consumed by the frictional force is the product of the frictional force F and the inertia opening amount 74 (distance L moved while receiving friction).
E2 = L × F = L × μ × m × g (Formula 3)
It becomes. Here, if all of the kinetic energy that the freezer originally had was consumed by friction before stopping, E = E2,
(M × V ^ 2) / 2 = L × μ × m × g (Formula 4)
It becomes. Divide both sides by m,
(V ^ 2) / 2 = L × μ × g (Formula 5)
It becomes. Therefore, the inertia opening amount 74 (that is, L) deforms (Equation 5),
L = (V ^ 2) / (2 × μ × g) (Formula 6)
Represented as:
式6により、惰性開き量74(すなわちL)は、スライドレールの摩擦係数μと速度Vによって導かれる。ここで速度Vは、駆動ピンと押し面とが離反して、惰性で開き始める時点での速度である。また、摩擦抵抗μはスライドレール11によって定まる一定値である。
According to
よって、速度Vを略一定にすれば、最大開き量73を略一定にすることができる。そこで、駆動機構15の減速比を大きくして、モータ24にかかる負荷トルク変動を小さくする。例えば減速比を1/100以上にすることが望ましい。これにより、モータ24による出力トルクに余裕が増えて、冷凍室収納食品の量に関わらず、モータ24の回転速度を略一定になるため、最大開き量73を略一定にできる。
Therefore, if the speed V is made substantially constant, the
また、位置5′における速度Vは、第三の駆動ピン20cがもつ開き方向23dの速度である。よって速度Vは、回転板19の回転速度に比例する。さらに、接点75d(第三の駆動ピン20cと第三の押し面21cとの接点)と駆動軸18間の距離、すなわち回転半径rに比例する。ここで、図6(c)から図6(d)において、駆動軸18と接点75cとを通る直線と、開き方向23cを示す直線とが、ほぼ直交する位置に接点75cがある。そのため、連結板16が開き方向23へ移動する速度は、第三の駆動ピン20cが駆動軸18のまわりに回転する際の周速に略等しくなる。
The speed V at the
(扉自動閉鎖動作)冷蔵庫では、マグネットパッキン14と冷蔵庫本体1との間に隙間ができ、所謂半ドア状態になることがある。このような半ドア状態における扉開閉装置
10の動作について、図7を用いて説明する。
(Automatic door closing operation) In the refrigerator, a gap is formed between the magnet packing 14 and the refrigerator
図7は本発明による扉開閉装置10が冷凍室5を閉鎖する際の動作を示す図である。
(a)は冷凍室5が開いており、連結板16の左端が引込位置34よりも、開き量35移動した状態を示している。これは、扉開閉装置10によって閉じ駆動動作が可能な範囲である。通常、冷凍室5にはクローザ13が設けられているので、クローザ13の引き込み力によって冷凍室は閉じられるが、食品の一部が引っかかったり、スライドレール11の動作が一時的に渋くなったりして引き込まれない場合がある。
FIG. 7 is a view showing an operation when the door opening and
(A) shows a state where the
ここで、連結板16には、受け面21aとは反対面であって、かつ扉側の面に、戻し面22が形成されている。これにより、回転板19を駆動軸18の周りに矢印CW方向(時計回り)に回転させると、第三の駆動ピン20cは戻し面22に当接する。図7(b)は、図7(a)からさらに回転板19を矢印CW方向に回転させた状態である。連結板16は第三の駆動ピン20cによって、矢印36方向(扉閉鎖方向)に付勢されて、連結板
16の図示左端が引込位置34に至るまで移動する。なお、図7(b)に示した位置は、マグネットパッキン14が冷蔵庫本体1に吸着して完全に閉じられた位置である。
Here, the connecting
その後、回転板19を矢印CCW方向(反時計回り)に回転して図7(c)の状態で停止する。これは、図3に示したと同様な位置である。
Thereafter, the rotating
上記のように、回転板19を扉開方向と反対方向に回転させることにより、冷凍室5が所謂半ドア状態になったとしても、連結板16は冷凍室5が閉じる方向に付勢されて、半ドアを防止できる。
As described above, by rotating the
冷凍室扉5aを閉じる際、マグネットパッキン14を引き剥がす力は要さず、かつクローザ13による引き込み力が生じる。そのため、扉開閉装置10によって加える閉じ力は、開き力と比べて弱い力でよい。本実施例によれば、冷凍室5を閉じる際には、駆動軸
18から最も遠方にある第三の駆動ピン20cが、連結板16の戻し面22を押すように構成されている。よって、駆動軸18に加わる駆動トルクが、開き時と同一であっても、閉じ力は開き力と比べてr1/r3だけ小さくなるので好適である。さらに、冷凍室5と冷蔵庫本体1との間に指などを挟み込んでしまった場合、挟む力は小さく安全性を高めることができる。
When closing the
また、冷凍室5において開動作よりも閉動作が低速なので、安全性を更に高めることができる。
Further, since the closing operation is slower than the opening operation in the
ここで、閉じ駆動可能な範囲である開き量35について、図2により説明する。開き量35は、冷凍室5の前面を形成する扉厚さ71よりも小とすることが望ましい。開き量
35が扉厚さ71よりも大だと、冷凍室5を引き込み開始する際、冷凍室扉5aと野菜室6(または切り替え室3)の扉との間に隙間72が生じ、指などを挟みこむ恐れがある。そこで、開き量35が扉厚さ71よりも小となる本構成では、指などを挟まれる恐れがなく、安全性を向上できる。
Here, the
(扉手動開閉動作)次に図8を用いて、冷凍室5が閉状態における回転板19の位置について説明する。扉開閉装置10を備えた冷蔵庫であっても、冷凍室5をユーザが手で引出したい場合が想定される。また、故障により扉開閉装置10が動作しない場合は、ユーザが手動で開閉できる構成がよい。この場合、扉開閉装置10が原因でユーザの手動動作を妨げたり、重くなったりしないことが望ましい。
(Manual Door Opening / Closing Operation) Next, the position of the
図8において、連結板16は図示左端が引き込み位置34に合致しており、冷凍室扉
5aが閉鎖された位置である。ユーザが手動で冷凍室扉5aを閉鎖状態から引出して開くと、容器12の下方に設けられている連結板16は、冷凍室扉5aの開放方向(図8においては左方)に移動して、連結板16′の位置に至る。ここで、連結板16に設けられた第二の受け面21bの先端(第二の先端37b)と、第一の駆動ピン20aとの間に隙間38が形成される。これにより、手動で冷凍室5を引出す際に連結板と駆動ピンとは接触しない。つまり、連結板16が開放方向に移動する際、回転板19に接触しないので抵抗にならず、冷凍室5を引出し自在に開くことができる。
In FIG. 8, the left end of the connecting
次に回転板19′は、連結板16に設けられた第一のピン20aの先端(第一の先端
37a)と、第三の駆動ピン20cとの間に隙間39がある。これにより、手動で冷凍室5を引出す際、連結板16と駆動ピンとが接触しないので、自在に冷凍室5を引出して開くことができる。
Next, in the
上記のように、ユーザが手動で冷凍室5を開閉する際、連結板16と駆動ピン20とが接触しないようにする。つまり、駆動軸18と第一の駆動ピン20aとを結ぶ直線が、原点範囲40の角度範囲内にあればよい。したがって、冷凍室5を閉鎖した場合には、回転板19が上記の原点範囲40になるように設定すれば、手動で開閉する際にも使い勝手を向上できる。
As described above, when the user manually opens and closes the
このような回転板19の角度範囲を本発明では、原点範囲にある、と称する。
In the present invention, such an angle range of the
(制御系の構成)次に図9を用いて、扉開閉装置10の駆動制御系について説明する。図9は、制御系の構成を示すブロック図である。
(Configuration of Control System) Next, the drive control system of the door opening /
開スイッチ8を備えた操作表示部7は、ユーザが開スイッチ8を押した際にその信号を制御回路41に送る。冷凍室5および野菜室6に設けられた夫々の駆動機構15のモータ24と、駆動軸18の回転位置を検出する回転検知手段32、および扉の開閉状態を検出するドア検知17とは、制御回路41に接続されている。
The
扉開閉装置10および制御回路41の駆動に必要な電力は、電源42から供給される。
Electric power necessary for driving the door opening /
回転検知手段32は、軸の回転によって抵抗値が変化する可変抵抗器や、軸の所定の回転位置を検出するマイクロスイッチ等であってもよい。 The rotation detection means 32 may be a variable resistor whose resistance value changes with rotation of the shaft, a microswitch that detects a predetermined rotation position of the shaft, or the like.
ドア検知17は、冷凍室扉5aが完全に閉じられているか否かを検出する第一のドア検知17aと、冷凍室扉5aの開き量が所定の開き量35以下であるか否かを検出する第二のドア検知17bとで構成される。例えば、扉に備えられたマグネットと冷蔵庫本体1に備えられたホール素子や、マイクロスイッチなどの検知手段であってもよい。
The
操作表示部7には、扉が半ドア状態になっていることをユーザに知らせるための報知手段70が備えられていてもよい。この報知手段70の一例は、ブザーを鳴動させたり、ランプを点灯又は点滅させたりするものがよい。
The
(扉開放制御)次に図10を用いて、冷凍室5を開放する際の開き制御の手順について説明する。図10は冷凍室5を開放する際の制御を示す流れ図である。
(Door Open Control) Next, with reference to FIG. 10, the procedure for opening control when the
開き動作を開始(ブロック43)すると、制御回路41は回転検知手段32の状態を監視して、駆動機構15の回転板19が動作を開始する原点範囲40にあるか否かを検出する(ブロック44)。ここで、原点範囲40とは、図8にて説明したように、冷凍室5を手動で開閉動作した場合にも、連結板16が駆動ピン20と干渉することがない範囲にある状態のことをいう。
When the opening operation is started (block 43), the
もし、回転板16が原点範囲40にない場合には、モータ24に通電(ブロック45)して、回転板16を回転させて原点範囲40になるようにする。モータ24をCW方向に回転させるか、あるいはCCW方向に回転させるかは、回転検知手段32からの信号によって判定する。具体的には、回転板16が原点範囲40に対してどちらの方向にずれているかを制御回路41が判定して、モータ24に対して駆動電圧の印加方向を定める。
If the
回転板19が原点範囲40にあることが検出され、かつユーザによって開スイッチ8が操作されたことを制御回路41が検出したら、モータ24を通電(ブロック47)して、回転板19を回転させる。このときの回転板19の回転方向は、図3であればCCW方向としており、回転板19が回転すると、図6にて説明したように連結板16が駆動ピン
20に付勢されて冷凍室5が開く。モータ24が引き続き回転して、回転検知手段32により検出された回転板19の回転位置が原点範囲40に入ったことが確認できたら(ブロック48)、モータを停止させて(ブロック49)一連の開き動作を終了する(ブロック50)。
When it is detected that the
次に、モータに通電(ブロック47)させて冷凍室5を開き始める際の電圧の加え方について説明する。モータを通電する際に定格電圧を急峻に加えると、モータのコイルには突入電流が流れるので、モータは最大の出力トルクを出して停止状態から急激に回転し始める。したがって、冷凍室5が開き始める際には最大の加速を行うことになり、開き始めの動作が急峻で勢いよく開いてしまう。
Next, how to apply a voltage when energizing the motor (block 47) and starting to open the
そこで、モータ24に通電(ブロック47)する際に定格電圧を急峻に加えるのではなく、通電の当初は一例として定格電圧の1/2程度の低電圧を加え、扉開閉装置10の駆動開始後、冷凍室5が開くに伴って、徐々に電圧を高くする。図6(c)から(d)において、駆動ピン20から連結板16へ伝達される開き方向23の速度が最大になるまでの範囲で、連続的に、あるいは断続的に電圧を上昇させて定格電圧に至るような電圧変化の通電を行うことが望ましい。そのように電圧を徐々に増加させることにより、冷凍室5が開きはじめる際の動作がゆっくりとなるので、勢い良く開くことがなく、開き方に高級感を付与できる。
Therefore, when the
またさらに、図6(e)の状態を過ぎた後、回転板19は矢印CCW方向に回転を継続して後、図6(a)に示した位置まで回転してから停止する。冷凍室5が開いた後は回転板19には負荷がかからずに空転する状態となる。したがって、図6(e)の状態を過ぎた後は、モータ24に加える電圧を定格電圧よりも低くして、モータ24の回転速度を低速としてもよい。そのようにモータ24の回転を低速とすることで、モータ24から生じる騒音や振動を低減して静粛な動作を実現できる。さらに、回転板19を低速で回転させることによって、モータ24が停止時に行き過ぎることがなく、図8にて説明した原点範囲40に確実に停止でき、精度を向上できる。
Furthermore, after passing the state of FIG. 6E, the rotating
(扉開閉スイッチ構成)次に、本発明による扉開閉機構に使用者が開き指示を与える際のスイッチ構成について説明する。図21は、本発明による扉開閉機構を備えた冷蔵庫の部分断面図であり、図22は図21に示したS部の拡大図を示している。S部は冷凍室5の前面を構成する扉体5aの上縁と、扉が閉じられた際に扉と当接する本体1側の枠体
87の近傍を示している。
(Door Open / Close Switch Configuration) Next, the switch configuration when the user gives an opening instruction to the door open / close mechanism according to the present invention will be described. FIG. 21 is a partial cross-sectional view of a refrigerator provided with a door opening / closing mechanism according to the present invention, and FIG. 22 is an enlarged view of an S portion shown in FIG. S part has shown the vicinity of the upper edge of the
扉体5aの前方上部には、押しボタン88が設けられており、扉体5a前面よりも突出している。押しボタン88の奥側には、押し棒89が設けられており、押しボタン88と押し棒89とは扉体5aを貫通してスライド可能に支持されている。押しボタン88と押し棒89とは戻しスプリング90によって生じる戻し力によって、図22(a)において図示左向きに付勢されて、図示しないストッパなどによって位置が保持される。
A
枠体87の扉体5aと接する側には、マイクロスイッチなどのスイッチ本体92が設けられており、枠体87の内部をスイッチ94から制御回路41に至る配線94が設けられている。
A
使用者が押しボタン88を手で押すと、図22(b)に示すように押しボタン88と押し棒89とが押し量91だけ図示右方に移動できるように構成されている。押し棒89がスイッチ本体92に設けられたプランジャ93を押して、スイッチ本体92内部に設けられた図示しない接点を閉じて、使用者が押しボタン88を押した信号を制御回路41に伝達することができる。
When the user presses the
使用者が押しボタン88から手を離すと、戻しスプリング90から発生する力によって、押しボタン88と押し棒89とは図示左側に移動する。そして、プランジャ93が復帰してスイッチ本体92内部の接点が開放された、図22(a)の状態に戻る。
When the user releases his / her hand from the
これにより、スイッチ本体92と、制御回路41とを接続する配線は本体側の枠体87の内部に設けられる構成とできるので、扉体5aには配線を設ける必要がない、という効果がある。
Thereby, since the wiring which connects the switch
また、冷凍室5を引き出す際に配線94は一緒に引き出されないので、開閉の際に配線94が絡まったり何かに引っかかったりすることがない。
Further, since the
またさらに、使用者からみると押しボタン88を押した際には冷凍室5を奥側に閉じる方向の力を加えることになる。使用者が押しボタン88を押した途端に制御回路41からモータ24に通電されて冷凍室5が電動で矢印23方向に開く動作であるとすれば、冷凍室5は使用者が力を加えているのと反対方向、すなわち使用者の手前方向に開き始めるので、使用者にとって不自然な動作に感じる。
Further, when viewed from the user, when the
そこで、使用者が押しボタン88を押した時点ではモータ24に通電されず、一旦押した押しボタン88から手を離した際にモータ24に通電される制御とする、これにより、使用者が押しボタン88を押して、押しボタン88から手を離す(手を押しボタン88前方に引く)動作に付随するように冷凍室5が手前に開いてくるので、使用者の手の動く方向と冷凍室5の動く(開く)方向とが同一となる。よって、使用者から見て動作に対する違和感がなく、自然な操作感が得られる、という効果がある。
Therefore, when the user presses the
この動作は、使用者が押しボタン88から手を離すとスイッチ本体92内部の接点が開放された状態に戻る。制御回路41がそれを検出してモータ24に通電されて冷凍室5が電動で開く動作とする。
In this operation, when the user releases the
(扉自動閉鎖制御)次に、図11を用いて、冷凍室5が完全に閉じていない、所謂半ドア状態から冷凍室5を閉じる際の制御の手順について説明する。図11は冷凍室5を閉じる際の閉じ制御の手順を示す流れ図である。動作を開始(ブロック51)してから原点範囲を検出(ブロック52)するまでモータ24に通電する(ブロック53)制御については、図10のブロック43からブロック45と同一である。
(Automatic door closing control) Next, a control procedure for closing the
第一のドア検知17aが冷凍室扉5aを検出していれば、冷凍室扉5aは半ドア状態ではなくて閉鎖されていることが確認できるので、ドア閉じ動作を完了する(ブロック55)。第一のドア検知17aがドアの閉鎖を検出できず、かつドアと冷蔵庫本体1との開き量が開き量35以下であることを第二のドア検知17bが検出した場合、冷凍室5は開き量35以下で開いた状態にある。もし、第二のドア検知17bが扉を検出しない場合、冷凍室5は開き量35以上に開いているので、本発明の扉開閉装置10では閉じることができない範囲である。その場合は、報知手段70を鳴動させて半ドアであることをアラームでユーザに報知する(ブロック57)。
If the
もし、第二のドア検知17bが扉を検知できれば、冷凍室5は半ドア状態であってかつ扉開閉装置10によって閉鎖可能な範囲なので、モータ24に通電する(ブロック58)。このときの回転方向は、図7においてはCW方向である。さらに、これにより、モータ24に印加する電圧を、例えば定格電圧の1/2ないし1/3程度と低くする。回転板
16が低速度でCW方向に回転するので、第三の駆動ピン20cが連結板19の第三の受け面21cに衝突する衝撃を緩和できる。
If the
モータ24をCW方向に所定時間、例えば3秒間通電すれば(ブロック59)、回転板19は図7(b)の状態に至って連結板16を矢印36方向に、すなわち冷凍室5を閉じる方向に移動させて冷凍室5を閉じる。所定時間経過した後に、モータ24がCCW方向に回転するよう通電して(ブロック60)、回転板19が原点範囲40(図8に示す)になるまで回転させる。回転検知手段32の信号によって原点範囲40にあることが検出すると(ブロック61)、モータ24の回転を停止させる(ブロック62)。ここで、第一のドア検知17aによって冷凍室5が閉鎖されていることを検出して(ブロック63)、冷凍室5は完全に閉鎖されたことを確認して、処理を終了する(ブロック66)。もし、第一のドア検知17aが冷凍室5の閉鎖を検知できなければ、半ドア状態が継続していると判断できるので、ブロック58からブロック63までの処理、すなわちモータ24に通電して回転板19をCW方向に回転して冷凍室5を閉鎖させる動作を複数回繰り返して行う(ブロック64)。もし、所定の回数、例えば3回この閉鎖動作を繰り返した後も第一のドア検知17aの閉鎖を検知できなければ、例えば何かが挟まっていて冷凍室5を閉鎖できないと判定して、報知手段70を鳴動させて半ドアであるというアラームをユーザに報知する(ブロック65)。
If the
また、使用者がドア開スイッチ8を誤って押して冷凍室5が開いて、使用者の体に当たるなどの現象を防止するために、図10にて説明した冷凍室5の開き動作を行わないように開スイッチの動作を無効にして、図11に示した閉じ動作のみを行うことをユーザが選択、設定可能な構成としても良い。
Further, in order to prevent a phenomenon that the user accidentally presses the
(駆動伝達部材)次に、本発明における他の実施例について、図12を用いて説明する。実施例1では、回転板19に駆動ピンが3本設けられている。一方、本実施例においては、回転板19に第四の駆動ピン20dが、駆動軸18から距離r4(>r3)なる位置に設けられている。連結板16には、第四の駆動ピン20dが当接するための第四の受け面21dが設けられている。
(Drive transmission member) Next, another embodiment of the present invention will be described with reference to FIG. In the first embodiment, the
冷凍室5を開く動作の際は、図6に示したと同様の動作を行い、加えて第四の駆動ピン20dが第四の受け面21dを扉開放方向である図示左方に押すため、連結板16が回転板19から受ける力の範囲が拡大する。また、r4>r3なので、駆動軸18の回転速度が一定であるとすれば、第四の駆動ピン20dが第四の受け面21dを図示左方に押し出す速度は第四の駆動ピン20dがない場合と比べてr4/r3だけ大きくなる。このように、力の範囲と速度の両方が拡大されるので、冷凍室5の開き量が拡大して、快適な操作感を得ることかできる。
In the operation of opening the
さらに、回転板19を矢印CW方向に回転すると、連結板16は図7の矢印36方向に移動して冷凍室5を閉鎖する。ここで、r4>r3なので、連結板16の開き量35をほぼr4/r3だけ大きくしても、冷凍室5を閉鎖することができる。これにより、半ドア状態から閉鎖できる開き量35を拡大できる。よって、半ドアが発生しても、確実に冷凍室扉5aを閉鎖でき、省エネを実現できると共に、収納された食品が外気の侵入によって劣化するのを防止できる。
Further, when the
(扉自動開閉機構)次に図13〜図16にて、図3に示す扉開閉装置10とは別の実施例について説明する。冷凍室底面には駆動機構15が設けられている。駆動機構15は、駆動軸18で回動自在に軸支された回転板19が設けられている。この回転板19には、4段構成でストロークを拡大する駆動伝達部材である駆動ピン(第一の駆動ピン20a、第二の駆動ピン20b、第三の駆動ピン20c、第四の駆動ピン20d)が設けられている。
(Automatic Door Opening / Closing Mechanism) Next, an embodiment different from the door opening /
そして、それぞれの駆動ピンと駆動軸18との間の距離については、先に述べた通りである。つまり、それぞれの距離の大小関係は、図12に示すように、r4>r3>r2>r1である。
The distance between each drive pin and the
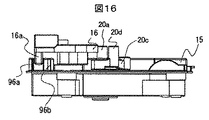
また、この駆動ピン20aと駆動ピン20dの高さ方向寸法Hは、図16に示すように駆動ピン20bと駆動ピン20cの高さ寸法hよりも、高く形成されている。一例として、駆動ピン20bと駆動ピン20cの高さ寸法はh=H/2となる。
Further, the height dimension H of the
これにより、高さ方向寸法が異なるため、駆動ピン20bと駆動ピン20cは、駆動ピン20aと駆動ピン20dが当接する連結板16の受け面21bと受け面21cには当接しない構成となる。
Accordingly, since the height direction dimensions are different, the
よって、回転板19と連結板16との間に異常が生じても、駆動ピン20bの受け面
21aへのかみ込みを防止し、回転板19と連結板16とがロックしてしまうことを防止できる。
Therefore, even if an abnormality occurs between the
同様に、駆動ピン20cの受け面21dへのかみ込みも、高さ方向寸法の違いにより防止できる。
Similarly, the
回転板19には磁石95が設けられ、この磁石95は、回転板19の原点位置を特定するものである。
The rotating
すなわち、回動後の回転板19は、先に述べたように常に図15に示す位置で止めるようにする。これにより、停電の場合でも連結板16に干渉されずに、扉を手動で開閉できる。
That is, the rotated rotating
具体的に回転検知手段は、図示しないホールICが回転板19の裏側の裏側のベース板15aに取り付けられており、このホールICにて磁石95が原点範囲40に位置していたか検知して、駆動軸18の停動を制御する。
Specifically, the rotation detecting means detects whether the Hall IC (not shown) is attached to the
回転検出手段32は、軸の回転によって抵抗値が変化する可変抵抗器あるいは軸の所定位置を検出するマイクロスイッチなどの検出手段であってもよい。 The rotation detecting means 32 may be a detecting means such as a variable resistor whose resistance value changes with rotation of the shaft or a microswitch for detecting a predetermined position of the shaft.
駆動機構15を形成するベース板15aには、案内ガイド96が設けられている。この案内ガイド96は、連結板16を所定位置に案内するために、凸片96aと凸片96bとがベース板15aに併設して備えられている。凸片96aと凸片96bは、互いに所定の間隔で設けられており、入り口側の開口部においては、その間隔が広く形成されている。
A
連結板16の摺動部16aが、案内ガイド96に入り易いようにしたためである。冷蔵庫本体側の寸法誤差や組立誤差、連結板16が組み付けられる引出し扉側の寸法誤差や組立誤差、等の影響により、案内ガイド96に沿って移動する摺動部16aの位置ずれが生じることがある。
This is because the sliding
そこで本構成は、駆動機構15の凸片96aと凸片96bとにより形成される開口部は、その間隔が他の所定間隔よりも広く形成されているので、案内ガイド96に摺動部16aが入り易い。
Therefore, in this configuration, since the opening formed by the
また、この凸片96bにはホールIC97とホールIC98とが設けられている。このホールIC97とホールIC98は、連結板16の摺動部16aに設けられた、磁石99の接近あるいは離反を検出して、回転軸18を駆動あるいは停止させる。
The
さらに、ホールIC97は、冷凍室5の扉が完全に閉じられているか否かを検出する。ホールIC98は、冷凍室5の扉の開き量が所定の開き量(例えば閉じ駆動範囲である、開き量35以下)であるか否かを、連結板16側の磁石99を伴って検出する。
Furthermore, the
すなわち、図16に示すように、ホールIC97とホールIC98に、磁石99が対向している時が、完全扉閉状態(例えば開き量35以下)である。磁石99がホールIC97
とホールIC98との間に位置している時が、半ドア状態ということになる。
That is, as shown in FIG. 16, when the
And the
回転板19と連結板16は実施例2において説明したのと同様に動作する。すなわち、半ドア状態のときに、図12に示すように回転板19をCW方向に回転させて引出し扉を閉じる制御をする。
The rotating
そして、実施例2と本実施例において相違する点は以下の2点である。 The differences between the second embodiment and the present embodiment are the following two points.
1点目は、第一の受け面21aには第一の駆動ピン20aしか当接できない構造とした点である。すなわち、第一の駆動ピン20aと第二の駆動ピン20bとは、高さ寸法が異なるため、第二の駆動ピン20bは第一の受け面21aには当接しない。
The first point is that only the
2点目は、案内ガイド96を設け、この案内ガイド96を形成する凸片96bにホールIC97とホールIC98が設けられた点である。
The second point is that a
すなわち、この2個のホールIC97とホールIC98と、連結板16側に設けた磁石99との位置関係に基づき、冷凍室5の開き動作を確実に行うことができる。
That is, the freezing
また、冷凍室5が完全に閉じない所謂半ドア状態であっても、回転板19を冷凍室5を開く場合とは反対方向に回転させて、冷凍室5を閉じる方向の力を連結板16に加えることで、半ドアを防止する。これにより、冷却性能の低下防止あるいは省エネ効果を得ることができる。
Further, even in a so-called half-door state in which the
この連結板16の戻し面22は、図7で説明した要領で第四の駆動ピン20dにより扉を閉じる方向に押される。
The
なお、戻し面22は、駆動ピン20dの動きを良好なものとするために、摺動部16aと垂直な角度から45度以下の傾斜面としておくのがよい。
The
また、駆動装置15は冷凍室5を構成する箱体側にネジ等をもって固定される。従って、冷凍室の扉引出し時、回転板19は当然箱体側に残る。一方、冷凍室扉側に取り付けられる連結板16は扉と共に引出される。この扉引出し時には、回転板19と連結板16との係合関係は解除される。
The driving
このため、本実施例においては、回転板19が取り付けられているベース板15aと案内ガイド96を一体に作ることで、寸法を確保すると共に、案内ガイド96を作る凸片
96a、凸96b間のガイド溝幅寸法を連結板16側の摺動部16aの肉厚に近づける等して、回転板19と連結板16両者の取り付け位置を確保し、寸法関係を安定化させる。
For this reason, in the present embodiment, the
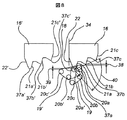
次に図17乃至19を用いて連結板16および駆動機構15を冷蔵庫本体1に組み込んだ例を説明する。
Next, an example in which the connecting
冷蔵庫本体1は箱体105によって形成され、箱体105内に貯蔵室が設けられる。そして、貯蔵室内の左右の側壁105bに沿うように扉枠(スライドレール)101が設けられており、貯蔵室内の後方には補強板102が設けられている。貯蔵室の底壁105aと側壁105bにて形成される空間には容器103が配設され、容器103の上方には容器104が配設される。貯蔵室内の底壁105aには、箱体側にくぼませて形成される凹部106が設けられる。また、容器103には、収納空間側にくぼませて形成されたくぼみ平面部107が設けられる。
The
なお、図17は、連結板16を取り付ける補強板を扉枠に取り付けるための補強板構造を示しており、扉枠101に懸架される容器103と容器104は取り外されている。
FIG. 17 shows a reinforcing plate structure for attaching a reinforcing plate for attaching the connecting
図示しないが、扉枠101はスライドレールと伴い、冷凍室扉5aの引出し寸法を拡大する。また、扉枠101は冷凍室5の側壁105bに取り付けられたレールの溝内を摺動する。容器103と容器104が冷凍室5よりさらに前方に引出せるスライドレールであった場合、このスライドレールの一方が側壁105bに、他方が扉枠101側に取り付けられることとなる。なお、スライドレールには先に説明したクローザ機構を持たせる。
Although not shown, the
補強板102は、扉枠101に懸架されており、容器103の後方底部を支持している。また、図18(c)に示すように、補強板102は薄板金属板(一例として2.0mm以下)をプレス加工等によってU字状に形成したものである。補強板102の幅(冷蔵庫本体1に対して前後方向の幅)は、連結板16をネジ108で固定できる幅である。
The reinforcing
さらに、この補強板102で扉枠101を接続することにより、扉枠101の横振れを防止している。
Further, by connecting the
次に図18(a)は、扉枠101に冷凍室容器を取り付けて、冷凍室扉5aを閉め、連結板16と回転板19とが組み合わされた状態を示す図である。また、図18(b)は、図18(a)の要部拡大図である。
Next, FIG. 18A shows a state in which the freezer compartment container is attached to the
容器103と容器104は、冷凍室扉5aの扉枠101に取り付けられ、冷凍室扉5aが引出されると、容器103と容器104が冷凍室5から前方に引出されるよう構成されている。
The
すなわち、容器103と容器104に設けられた係止部(図示せず)が、扉枠101に設けられた係合孔101aに係止することにより位置決めされ、容器103の後端は補強板102上に載置されている。
That is, a locking portion (not shown) provided in the
言い換えると、補強板102のU字形状は、容器103の後方底部をすくう形状に形成されている。また、補強板102の立ち上がりフランジ102aにより、容器103の位置決めを行うようにしている。
In other words, the U-shape of the reinforcing
そして、容器103のフランジ上に容器104の底部が載置される形で取り付けられている。従って、容器104は冷凍室扉5aを引出した時、容器103のフランジ上を後方に摺動し、容器103内の冷凍食品を取り出せる構造としている。
Then, the bottom of the container 104 is mounted on the flange of the
さらに、容器103の後部を、収納空間側、すなわち上方にくぼませて、くぼみ平面部107が形成されている。このくぼみ平面部107は、補強板102へ連結板16を取り付ける際の取り付け寸法を考慮したものである。
Further, the rear portion of the
一方、底壁105aには、箱体側、すなわち下方にくぼませて、凹部106が形成されている。この凹部106は、駆動機構15を底壁105aに取り付ける際の、取り付け寸法を考慮したものである。
On the other hand, a
これにより、連結板16と回転板19とが動作する位置関係で配設される。
Thereby, the connecting
本実施例においては、くぼみ平面部107に連結板16を取り付け、凹部106に駆動機構15を設けたことにより、容器103と底壁105aとの隙間を最小限にすることができる。言い換えると、容器103の内容積を確保することができる構成である。
In the present embodiment, the connecting
これにより、駆動機構15の案内ガイド96に対し、連結板16が上下左右位置に対して所定の範囲で出入りするように位置出しすることができる。
As a result, the connecting
すなわち、駆動機構15は底壁105aに形成される凹部106内に、ネジ等で固定されることにより、部品あるいは組み付け誤差を考慮した公差内に取り付けることができる。
That is, the
しかし、冷凍室扉5aは、先に説明したように、片持ちの扉枠101に容器103を懸架させるので、扉枠101の冷凍室扉5aに対する直角平行度が狂い、箱体105に対して傾いて閉まることがある。このような状態で連結板16を取り付けた場合、案内ガイド96に連結板16がうまく入って行かなくなってしまうが。そこで本構成は、補強板102が扉枠101の左右振れを防止し、冷凍室扉5aに対する扉枠101の直角平行度を確保するものである。
However, since the
また、容器103は一般的に樹脂の射出成形等で作られ、肉厚は1mm前後である。そのため、収納する食品の量によっては容器103の底は変形するおそれがある。具体的には、容器の底壁が下方にたわむ。そこで本構成は、補強板102が容器103を支えることで、たわみを防止できる。
The
さらに、補強板102の立ち上がりフランジ102aは、容器103が扉枠101から扉開閉時の衝撃で後方に飛び出してしまうのを防止する役目を果たし、連結板16が駆動機構15の案内ガイド96に安定して出入りするのを確保する役目も果たしている。
Further, the rising
次に図19において、凹部106には、凹形状に沿うようにして下ケース109bが配設されている。下ケース109bは上方が開放された箱形状であり、この開放部を閉鎖するように上ケース109aが配設される。下ケース109bと上ケース109aとにより形成された空間には、モータ24と、図4に示した歯車列が配設される。
Next, in FIG. 19, a
下ケース109bのフランジ109cは、箱体105の底壁105aより上方に突出するように構成される。すなわち、上ケース109aと下ケース109bとの合わせ面は、底壁105aよりも上方に位置するように配設される。
The
これにより、冷凍室5の下方に水が溜まった場合でも、下ケース109bの内部に浸入するのを防止できる。すなわち、冷凍室5の下部に溜まった水の下ケース109b内への浸入による、駆動機構15の損傷を防止できる構造である。
Thereby, even when water accumulates below the
また、下ケース109aと上ケース109bを合わせることで形成された空間は、内部に内空間110aが形成され、この内空間110aの外周に外空間110bが区画形成されるように構造される。具体的に内空間110aは、下ケース109aの底壁から上方に延伸した仕切壁が、モータ24と、図4に示した歯車列を囲繞するようにして形成されている。外空間には、図示しないネジ孔が穿設され、上ケース109a、下ケース109bが、底壁105aに対して位置決めして固定できるように構成される。
The space formed by combining the
さらに好ましくは、上ケース109aと下ケース109bとの合わせ面に、シリコン等を塗布し、合わせ面の隙間を塞ぐ構成とする。これにより、ケース内部への浸入をより防止できる。
More preferably, silicon or the like is applied to the mating surface of the
また、上ケース109aと下ケース109bの合わせ面よりも上方に、モータのリード線引き出し部が設けられる。すなわち、底壁105aよりも上方にリード線引出し部が設けられるので、ケース内部への浸入をより防止できる。
A lead wire lead-out portion for the motor is provided above the mating surface of the
さらに、本発明による扉開閉装置を冷凍室5および野菜室6の両方に設けた場合の動作について説明する。図2に示すように、野菜室6が最も下段の底面近傍にあり、その上段に冷凍室5が設けられているものとする。
Furthermore, the operation when the door opening and closing device according to the present invention is provided in both the
使用者が冷蔵庫1の正面に立って冷凍室5を開いたとき、冷凍室5が電動で開く量は例えば15cmないし20cm程度であるとすれば、開いた際に冷凍庫の内部を開口部から見渡すことができるので好適である。一方、野菜室6においては、野菜室6が床面近傍にあるため、冷凍室と同様に開くとすれば、開いた際に野菜室6の扉の下端がユーザのつま先に当たる恐れがある。
When the user stands in front of the
そこで、下段にある野菜室6は、上段にある冷凍室5と比べて開く際の開き速度を遅くすることと、さらには開き量を例えば10cm以内と小さくすることが安全上望ましい。
Therefore, it is desirable in terms of safety that the
なお、上記の説明では野菜室が冷凍室よりも下端にあるものとして説明したが、冷凍室が野菜室よりも下段にある場合には、冷凍室の開き量ないし開き速度を野菜室よりも小とすることが望ましい。 In the above description, the vegetable room is described as being at the lower end of the freezer room. However, when the freezer room is at a lower stage than the vegetable room, the opening amount or opening speed of the freezer room is smaller than that of the vegetable room. It is desirable that
本発明によれば、冷蔵庫の引出し扉の開き力を低減して軽快に扉を開放することを可能とするとともに、いわゆる半ドア状態から自動的に扉を閉鎖して省エネ効果を向上させることができる。 According to the present invention, it is possible to open the door lightly by reducing the opening force of the drawer door of the refrigerator, and to improve the energy saving effect by automatically closing the door from a so-called half-door state. it can.
すなわち、冷凍室5を閉鎖状態から開き始める際には駆動軸18の最も近傍に配置された第一の駆動ピン20aが連結板16を押し出して駆動することで、低速であるが大きな力を出してマグネットパッキンを引き剥がす。引き続き第一の駆動ピン20aよりも遠方に設けられた第二の駆動ピン20bが連結板16を押し出して中程度の速度で中程度の力を出して駆動することでクローザ13の引込力に抗して開き動作を継続して冷凍室5を加速する。さらに引き続いて第二の駆動ピン20bよりも駆動軸18から遠方に設けられた第三の駆動ピン20cが連結板16を押し出して、力は小さいが高速で駆動することによって冷凍室5をさらに加速することができるので、冷凍室5の開き動作を確実に行うのに都合が良く、確実に開き動作を行うことができる、という効果がある。
That is, when the
さらに、冷凍室5が完全には閉じずに所謂半ドア状態になっていたとしても、回転板
19を冷凍室5を開く場合とは反対方向に回転させることによって、連結板16に対して冷凍室5を閉じる方向の力を加えて閉じることができるので、半ドアを防止して省エネ効果が得られる。上記の閉鎖動作を複数回繰り返すことで半ドア防止をさらに確実にして、信頼性を向上できる。
Furthermore, even if the
さらに冷凍室を閉じ始める開き量35が扉厚さ71よりも小となるようにすれば、指などを挟まれる恐れがなく安全性を高めることができる。
Furthermore, if the
手動で開閉する場合には、本発明による扉開閉機構は冷蔵庫本体に設けられた駆動機構と、引出し扉側と一体に設けられた連結板とは接触しないので、引出し開閉の際に使用者による手動動作を妨げたり、開閉動作が重くなったり、等の現象が生じないので使い勝手がよく、また万一の故障の際にも使用者の使い勝手を損なうことがない。 When manually opening and closing, the door opening and closing mechanism according to the present invention does not contact the drive mechanism provided in the refrigerator body and the connecting plate provided integrally with the drawer door side, so that the user can open and close the drawer. It does not impede manual operation or increase the opening / closing operation, so that it is easy to use and does not impair the user's usability in the event of a failure.
また、片持ちの扉枠101に懸架される容器を安定して位置決めする補強板を設け、この補強板に連結部材を取り付けることにより、連結部材と駆動機構との係合状態が確保でき、信頼性を向上できる。
In addition, by providing a reinforcing plate for stably positioning the container suspended on the
また、駆動機構の配設されるケースにおいて、下ケース109bのフランジを冷凍室または野菜室の底壁よりも上方に突出させることで、ケース内への浸入による駆動機構の損傷を防止することができ、信頼性を向上できる。
Further, in the case where the drive mechanism is arranged, the flange of the
なお、本実施例においては扉開閉装置10が冷凍室5ないし野菜室6の引出し扉に設けられている例を示したが、本実施例に限定されるものではなく冷蔵室扉2の回転式の扉に設けられるものであっても同様な効果が得られる。
In the present embodiment, the door opening /
また、本実施例においては冷蔵庫に扉開閉装置を備えた構成について説明したが、冷蔵庫に限定されるものではなく、例えば文書類を保管するファイルキャビネットや、手前に引き出して使用する流し台組み込み型の食器洗い乾燥機、などの引き出し式の機器に適用でき、その場合にも本発明にて説明したと同様な効果がある。 Further, in the present embodiment, the configuration in which the refrigerator is provided with the door opening / closing device has been described, but it is not limited to the refrigerator, for example, a file cabinet for storing documents or a sink built-in type that is pulled out and used for the front. The present invention can be applied to a drawer-type device such as a dishwasher, and in that case, the same effect as described in the present invention can be obtained.
本実施例においては、駆動機構15は平歯車のみによって構成される例を示したが、平歯車に限定されるものではなく、ウォームギヤを用いた構成であってもよい。
In the present embodiment, an example in which the
またさらに、駆動ピン20は本実施例のような円筒状のピンではなく、回転式のローラであってもよい。 Furthermore, the drive pin 20 may be a rotary roller instead of the cylindrical pin as in the present embodiment.
1 冷蔵庫本体
2 冷蔵室
2a 冷蔵室扉
3 切り替え室
3a 切り替え室扉
4 製氷室
5 冷凍室
5a 冷凍室扉
6 野菜室
6a 野菜室扉
7 操作表示部
8 開スイッチ
10 扉開閉装置
11 スライドレール
12 容器
13 クローザ
14 マグネットパッキン
15 駆動機構
15a ベース板
16 連結板
16a 摺動部
17 ドア検知
17a 第一のドア検知
17b 第二のドア検知
18 駆動軸
19 回転板
20 駆動ピン
20a 第一の駆動ピン
20b 第二の駆動ピン
20c 第三の駆動ピン
20d 第四の駆動ピン
21 受け面
21a 第一の受け面
21b 第二の受け面
21c 第三の受け面
21d 第四の受け面
22 戻し面
23 開き方向
24 モータ
25 モータピニオン
26 アイドラ
27 アイドラピオン
28 アイドラ
29 アイドラピオン
30 駆動ギヤ
31 トルク制限手段
32 回転検知手段
33 移動量
34 引込位置
35 開き量
36 矢印
37a 第一の先端
37b 第二の先端
37c 第三の先端
38 隙間
39 隙間
40 原点範囲
41 制御回路
42 電源
70 報知手段
71 扉厚さ
72 扉間隙間
73 最大開き量
74 惰性開き量
75 接点
76 カム
77 回転中心
78 カム外周
79 カム受け板
80 回転方向
81 矢印
82 カム半径
83 周速
84 開き速度
85 滑り速度
86 接点
87 枠体
88 押しボタン
89 押し棒
90 戻しスプリング
91 押し量
92 スイッチ本体
93 プランジャ
94 配線
95 磁石
96 案内ガイド
96a、96b 突片
97 ホールIC
98 ホールIC
99 磁石
100 磁石
101 扉枠
101a 係合孔
102 補強板
102a 立ち上がりフランジ
103 容器(a)
104 容器(b)
105 箱体
105a 底壁
105b 側壁
106 凹部
107 くぼみ平面部
108 ネジ
109 ケース
109a 上ケース
109b 下ケース
109c フランジ
110a 内空間
110b 外空間
DESCRIPTION OF SYMBOLS 1 Refrigerator body 2 Refrigeration room 2a Refrigeration room door 3 Switching room 3a Switching room door 4 Ice making room 5 Freezing room 5a Freezing room door 6 Vegetable room 6a Vegetable room door 7 Operation display part 8 Open switch 10 Door opening and closing device 11 Slide rail 12 Container 13 Closer 14 Magnet packing 15 Drive mechanism 15a Base plate 16 Connecting plate 16a Sliding part 17 Door detection 17a First door detection 17b Second door detection 18 Drive shaft 19 Rotating plate 20 Drive pin 20a First drive pin 20b First Second drive pin 20c Third drive pin 20d Fourth drive pin 21 Receiving surface 21a First receiving surface 21b Second receiving surface 21c Third receiving surface 21d Fourth receiving surface 22 Return surface 23 Opening direction 24 Motor 25 motor pinion 26 idler 27 idler pinion 28 idler 29 idler pinion 30 drive gear 31 torque limit Means 32 Rotation detection means 33 Movement amount 34 Retraction position 35 Opening amount 36 Arrow 37a First tip 37b Second tip 37c Third tip 38 Clearance 39 Clearance 40 Origin range 41 Control circuit 42 Power supply 70 Notification means 71 Door thickness 72 Door-to-door clearance 73 Maximum opening amount 74 Inertial opening amount 75 Contact point 76 Cam 77 Center of rotation 78 Cam outer periphery 79 Cam receiving plate 80 Direction of rotation 81 Arrow 82 Cam radius 83 Peripheral speed 84 Opening speed 85 Sliding speed 86 Contact 87 Frame body 88 Push Button 89 Push bar 90 Return spring 91 Push amount 92 Switch body 93 Plunger 94 Wire 95 Magnet 96 Guide guide 96a, 96b Projection piece 97 Hall IC
98 Hall IC
99
104 Container (b)
105
Claims (6)
前記貯蔵室に設けられ開閉可能な引出し扉と、
前記貯蔵室に設けられ前記引出し扉を開閉させる駆動手段と、
前記駆動手段にて回転可能であり、且つ回転方向に向かって回転中心からの距離を除々に変化させた位置に複数の駆動伝達部材が設けられた回転部材と、
前記引出し扉又は該引出し扉とともに前後方向に引出すことができる収納部の下面に設けられ、且つ前記駆動伝達部材から動力が伝達されて前記回転部材の回転運動を直線運動に変換させる連結部材と、
前記引出し扉が閉鎖されていることを検知する扉閉検知手段を備え、
前記扉閉検知手段が前記引出し扉が閉鎖状態であることを検知するまで、所定回数、前記駆動伝達部材が前記連結部材に当接するように前記回転部材を回転駆動させることを特徴とする扉駆動装置を備えた冷蔵庫。 A storage compartment defined in the refrigerator body;
A drawer door provided in the storage room and capable of opening and closing;
Drive means provided in the storage chamber for opening and closing the drawer door;
A rotating member provided with a plurality of drive transmission members at a position that can be rotated by the driving means and gradually change the distance from the rotation center in the rotation direction ;
A connecting member that is provided on the lower surface of the storage portion that can be pulled out in the front-rear direction together with the drawer door or the drawer door, and that transmits power from the drive transmission member to convert the rotational motion of the rotating member into linear motion ;
Comprising door closing detection means for detecting that the drawer door is closed ;
Door previous Kitobira閉detecting means, wherein the causing the rotary member rotatably driven so as to detect that the drawer door is closed, a predetermined number of times, the drive transmission member is brought into contact with said connecting member A refrigerator equipped with a driving device.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007031033A JP4384189B2 (en) | 2007-02-09 | 2007-02-09 | refrigerator |
| CNB2007101403847A CN100545559C (en) | 2007-02-09 | 2007-08-10 | Refrigerator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007031033A JP4384189B2 (en) | 2007-02-09 | 2007-02-09 | refrigerator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008196750A JP2008196750A (en) | 2008-08-28 |
| JP4384189B2 true JP4384189B2 (en) | 2009-12-16 |
Family
ID=39755859
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007031033A Expired - Fee Related JP4384189B2 (en) | 2007-02-09 | 2007-02-09 | refrigerator |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4384189B2 (en) |
| CN (1) | CN100545559C (en) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106355756B (en) * | 2016-09-27 | 2022-08-05 | 内蒙古智牧溯源技术开发有限公司 | Freezing formula automatic vending machine |
| CN107348925A (en) * | 2017-09-08 | 2017-11-17 | 佛山市顺德区美的洗涤电器制造有限公司 | Runner assembly and dish-washing machine |
| CN107830313B (en) * | 2017-12-14 | 2024-01-26 | 重庆市中美电力设备有限公司 | Pull type energy-saving control integrated box |
| CN109780799B (en) * | 2018-12-28 | 2022-11-01 | 海尔智家股份有限公司 | Refrigerator with a door |
| KR20210008708A (en) * | 2019-07-15 | 2021-01-25 | 엘지전자 주식회사 | Refrigerator and control method thereof |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001111238A (en) * | 1999-10-08 | 2001-04-20 | Sumitomo Metal Electronics Devices Inc | Via-hole connection strength measurement device and measurement method |
| JP2002267352A (en) * | 2001-03-06 | 2002-09-18 | Sanyo Electric Co Ltd | Refrigerator |
| JP4076528B2 (en) * | 2004-08-30 | 2008-04-16 | 日立アプライアンス株式会社 | Refrigerator door closing device |
-
2007
- 2007-02-09 JP JP2007031033A patent/JP4384189B2/en not_active Expired - Fee Related
- 2007-08-10 CN CNB2007101403847A patent/CN100545559C/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008196750A (en) | 2008-08-28 |
| CN100545559C (en) | 2009-09-30 |
| CN101240971A (en) | 2008-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4247279B2 (en) | refrigerator | |
| JP4247278B2 (en) | refrigerator | |
| JP4384187B2 (en) | refrigerator | |
| JP4384190B2 (en) | Refrigerator and refrigerator door opening and closing device | |
| JP4384189B2 (en) | refrigerator | |
| JP4861926B2 (en) | refrigerator | |
| JP4993946B2 (en) | Drawing device | |
| JP4127312B2 (en) | refrigerator | |
| JP4477646B2 (en) | refrigerator | |
| JP4366410B2 (en) | refrigerator | |
| JP6348588B2 (en) | Furniture drive | |
| JP4374380B2 (en) | refrigerator | |
| JP4988483B2 (en) | Pull-out equipment | |
| JP4384191B2 (en) | refrigerator | |
| JP4384188B2 (en) | refrigerator | |
| JP3524815B2 (en) | Motion assist device and refrigerator | |
| JP2000291333A (en) | Operation support device | |
| JP4117336B1 (en) | Pull-out equipment | |
| JP3604947B2 (en) | Motion assist device and door opening / closing mechanism | |
| JP3519313B2 (en) | Motion assist device and motion assist device for refrigerator | |
| JP2006118858A (en) | Refrigerator | |
| EP1630503B1 (en) | Refrigerator having basket lift apparatus | |
| JP4117337B1 (en) | Door opening and closing device | |
| JP3591628B2 (en) | Motion assist device and motion assist device for refrigerator | |
| JP3537322B2 (en) | Drawer drive |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081226 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090303 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090915 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090924 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121002 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131002 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |