JP4378552B1 - 超音波プローブ支持装置 - Google Patents
超音波プローブ支持装置 Download PDFInfo
- Publication number
- JP4378552B1 JP4378552B1 JP2008188709A JP2008188709A JP4378552B1 JP 4378552 B1 JP4378552 B1 JP 4378552B1 JP 2008188709 A JP2008188709 A JP 2008188709A JP 2008188709 A JP2008188709 A JP 2008188709A JP 4378552 B1 JP4378552 B1 JP 4378552B1
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic probe
- frame
- knee
- support device
- mounting unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0858—Clinical applications involving measuring tissue layers, e.g. skin, interfaces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4209—Details of probe positioning or probe attachment to the patient by using holders, e.g. positioning frames
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4514—Cartilage
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4528—Joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4272—Details of probe positioning or probe attachment to the patient involving the acoustic interface between the transducer and the tissue
- A61B8/4281—Details of probe positioning or probe attachment to the patient involving the acoustic interface between the transducer and the tissue characterised by sound-transmitting media or devices for coupling the transducer to the tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4405—Device being mounted on a trolley
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Pathology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
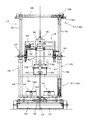
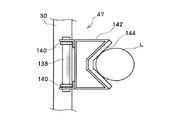
【解決手段】膝を屈曲させた状態で、大腿に当接する装着ユニットフレーム58と、膝に当接する膝当接部62により、装着ユニット16の位置決めを行う。装着ユニットは、さらに超音波プローブを膝頭に沿って移動させるためのプローブ支持フレーム60を備える。プローブ支持フレームは、膝関節の機械中心回りに回動し、これによって超音波プローブ78は、膝関節の機械中心に向いた状態で、膝頭に沿って移動し、超音波ビームの走査を行う。
【選択図】図3
Description
Claims (9)
- 膝を屈曲させた状態で、超音波プローブを、膝頭に沿って移動可能に支持する超音波プローブ支持装置であって、
大腿および膝に装着する装着ユニットを含み、
装着ユニットは、
大腿に当接する装着ユニットフレームと、
膝または膝下に当接する膝当接部と、
装着ユニットフレームに対して超音波プローブを支持し、かつこの超音波プローブが膝関節中心を向いた状態で膝頭に沿って移動するよう支持するプローブ支持フレームと、
を有する、超音波プローブ支持装置。 - 請求項1に記載の超音波プローブ支持装置であって、
膝当接部は、膝頭に当接して送受される超音波の音響整合を行う音響整合部材を含み、この音響整合部材は膝頭に沿った湾曲した形状を有する、
超音波プローブ支持装置。 - 請求項2に記載の超音波プローブ支持装置であって、
前記膝当接部は、装着ユニットフレームに固定されて音響整合部材を膝の右側および左側で支持する整合部材支持フレームを含み、この整合部材支持フレームは膝頭に沿って湾曲した形状を有し、
整合部材支持フレームの湾曲形状に倣って、音響整合部材が湾曲した形状となる、
超音波プローブ支持装置。 - 請求項1に記載の超音波プローブ支持装置であって、
前記整合部材は、整合部材支持フレームに支持された固定部分と、固定部分から先に延び、前後方向の動きが許容される自由部分を有する、
超音波プローブ支持装置。 - 請求項3または4に記載の超音波プローブ支持装置であって、前記整合部材支持フレームは円弧形状である、超音波プローブ支持装置。
- 請求項1〜5のいずれか1項に記載の超音波プローブ支持装置であって、前記プローブ支持フレームは、装着ユニットフレームに対して回動可能に支持されており、この回動によって、超音波プローブの前記膝頭に沿う移動が実現される、超音波プローブ支持装置。
- 請求項1〜6のいずれか1項に記載の超音波プローブ支持装置であって、さらに、
床に設置されるベースと、
ベースに立設され、またベースに対し回動可能に支持された回動フレームと、
を有し、
前記装着ユニットは、回動フレームに回動可能に支持され、
回動フレームが、膝に対し倒れ込むように回動して、装着ユニットが大腿および膝または膝下に当接される、超音波プローブ支持装置。 - 請求項7に記載の超音波プローブ支持装置であって、
前記回動フレームは、
前記ベースに回動可能に支持される下フレームと、
下フレームに対して回動の半径方向にスライドし、前記装着ユニットを回動可能に支持する上フレームと、
を有する、
超音波プローブ支持装置。 - 請求項1〜8のいずれか1項に記載された超音波プローブ支持装置と、前記超音波プローブ支持装置に支持される超音波プローブを含む超音波ユニットと、を有し、前記超音波プローブにより送受された超音波に基づき大腿骨遠位端の軟骨の超音波情報を取得する、超音波診断装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008188709A JP4378552B1 (ja) | 2008-07-22 | 2008-07-22 | 超音波プローブ支持装置 |
| EP09800367.6A EP2314221A4 (en) | 2008-07-22 | 2009-07-17 | NON-ALIGNED ELECTROMAGNETIC STEEL PLATE, AND METHOD FOR THE PRODUCTION THEREOF |
| US13/055,376 US8453511B2 (en) | 2008-07-22 | 2009-07-17 | Ultrasonic probe support device |
| PCT/JP2009/062982 WO2010010853A1 (ja) | 2008-07-22 | 2009-07-17 | 超音波プローブ支持装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008188709A JP4378552B1 (ja) | 2008-07-22 | 2008-07-22 | 超音波プローブ支持装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4378552B1 true JP4378552B1 (ja) | 2009-12-09 |
| JP2010022647A JP2010022647A (ja) | 2010-02-04 |
Family
ID=41459733
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008188709A Active JP4378552B1 (ja) | 2008-07-22 | 2008-07-22 | 超音波プローブ支持装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8453511B2 (ja) |
| EP (1) | EP2314221A4 (ja) |
| JP (1) | JP4378552B1 (ja) |
| WO (1) | WO2010010853A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013085564A (ja) * | 2011-10-13 | 2013-05-13 | Univ Of Tokyo | 膝計測装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6071282B2 (ja) * | 2011-08-31 | 2017-02-01 | キヤノン株式会社 | 情報処理装置、超音波撮影装置および情報処理方法 |
| JP6224341B2 (ja) * | 2013-04-24 | 2017-11-01 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 固定具及び超音波診断装置 |
| JP6190465B2 (ja) | 2013-10-07 | 2017-08-30 | 古野電気株式会社 | 超音波診断装置 |
| FR3013956B1 (fr) * | 2013-12-04 | 2017-09-15 | Univ Rabelais Francois | Methode d'evaluation in vivo de l'etat physiopathologique d'un tissu biologique et dispositif associe |
| CN114391874B (zh) * | 2022-01-21 | 2023-06-23 | 深圳市龙华区中心医院 | 指关节检查用可调节多切面超声指套装置 |
| CN119112241B (zh) * | 2024-11-11 | 2025-03-25 | 德韵健(山东)医疗科技有限公司 | 一种具有辅助固定机构的医学超声检测装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4922431B1 (ja) * | 1970-07-07 | 1974-06-08 | ||
| US4457311A (en) | 1982-09-03 | 1984-07-03 | Medtronic, Inc. | Ultrasound imaging system for scanning the human back |
| DE3427001C1 (de) * | 1984-07-21 | 1986-02-06 | Dornier System Gmbh, 7990 Friedrichshafen | Ortungs- und Positioniervorrichtung |
| DE3925014A1 (de) * | 1989-07-27 | 1991-01-31 | Joachim Dr Med Grifka | Verfahren zur pruefung der stabilitaet von gelenken, insbesondere kniegelenken des menschlichen koerpers und haltegeraet zur durchfuehrung des verfahrens |
| US7789841B2 (en) * | 1997-02-06 | 2010-09-07 | Exogen, Inc. | Method and apparatus for connective tissue treatment |
| US6117080A (en) | 1997-06-04 | 2000-09-12 | Atl Ultrasound | Ultrasonic imaging apparatus and method for breast cancer diagnosis with the use of volume rendering |
| JP2002345821A (ja) | 2001-05-29 | 2002-12-03 | Koji Hattori | 関節腔内の超音波解析システム |
| EP1466565A4 (en) * | 2002-01-18 | 2010-04-21 | Teijin Ltd | METHOD OF TREATING OSTEOCHONDRITIS AND APPARATUS FOR TREATING OSTEOCHONDRITIS |
| CN101203182B (zh) * | 2005-07-25 | 2011-08-03 | U系统公司 | 用于超声组织扫描的压缩表面 |
| US20100152584A1 (en) * | 2006-07-25 | 2010-06-17 | Arie Ariav | Method for measuring various parameters of bones and joints |
| US8444564B2 (en) * | 2009-02-02 | 2013-05-21 | Jointvue, Llc | Noninvasive diagnostic system |
| EP2400934A4 (en) * | 2009-02-25 | 2015-07-08 | Zimmer Inc | TAILOR-MADE ORTHOPEDIC IMPLANTS AND APPROPRIATE PROCEDURES |
| US20110112650A1 (en) * | 2009-11-09 | 2011-05-12 | Masini Michael A | Modified modular joint prosthesis component |
-
2008
- 2008-07-22 JP JP2008188709A patent/JP4378552B1/ja active Active
-
2009
- 2009-07-17 EP EP09800367.6A patent/EP2314221A4/en not_active Withdrawn
- 2009-07-17 US US13/055,376 patent/US8453511B2/en active Active
- 2009-07-17 WO PCT/JP2009/062982 patent/WO2010010853A1/ja not_active Ceased
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013085564A (ja) * | 2011-10-13 | 2013-05-13 | Univ Of Tokyo | 膝計測装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2314221A1 (en) | 2011-04-27 |
| US20110132094A1 (en) | 2011-06-09 |
| JP2010022647A (ja) | 2010-02-04 |
| WO2010010853A1 (ja) | 2010-01-28 |
| US8453511B2 (en) | 2013-06-04 |
| EP2314221A4 (en) | 2013-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4378552B1 (ja) | 超音波プローブ支持装置 | |
| NL1041488B1 (en) | Device for fixating a medical instrument. | |
| US10925519B2 (en) | Robotic knee testing (RKT) device having decoupled drive capability and systems and methods providing the same | |
| US11484254B2 (en) | Floating patella sensor, knee stabilizer with same and robotic knee testing apparatus with same | |
| JPH11313821A (ja) | 医用タ―ゲット装置 | |
| JP2013527003A (ja) | 膝弛緩の測定デバイス | |
| JP4374470B1 (ja) | 超音波プローブ用の膝用音響整合器 | |
| JP2009045189A (ja) | 膝関節回旋角度計測装置 | |
| KR102198041B1 (ko) | 다중 자세 교정이 가능한 복합 척추검사 보조장치 | |
| KR102497908B1 (ko) | 방사선 촬영용 무릎 자세 보조기 | |
| JP4814690B2 (ja) | 骨検査用加圧装置 | |
| JP5858378B2 (ja) | 音響整合媒体ユニット | |
| JP4803402B2 (ja) | 歯科光診断装置用プローブ | |
| JP4814689B2 (ja) | 骨検査システム及び検査部位固定装置 | |
| JP2013502253A (ja) | 膝の回動不安定性を測定する測定デバイス | |
| KR20080051138A (ko) | 심장 임펄스를 모니터링하기 위한 방법 및 장치 | |
| JP2007117715A (ja) | 医療用診療台 | |
| CN100428915C (zh) | 头颈部减影ct成像检查的辅助装置 | |
| JP5761755B2 (ja) | 膝計測装置 | |
| JP2007175417A (ja) | 生体固定装置 | |
| JP4477576B2 (ja) | 生体固定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090831 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121002 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4378552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121002 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131002 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |