JP4285279B2 - ロボットに搭載されたステレオ・カメラの診断用装置、並びにロボット装置に搭載されたステレオ・カメラの診断方法 - Google Patents
ロボットに搭載されたステレオ・カメラの診断用装置、並びにロボット装置に搭載されたステレオ・カメラの診断方法 Download PDFInfo
- Publication number
- JP4285279B2 JP4285279B2 JP2004060113A JP2004060113A JP4285279B2 JP 4285279 B2 JP4285279 B2 JP 4285279B2 JP 2004060113 A JP2004060113 A JP 2004060113A JP 2004060113 A JP2004060113 A JP 2004060113A JP 4285279 B2 JP4285279 B2 JP 4285279B2
- Authority
- JP
- Japan
- Prior art keywords
- stereo camera
- diagnostic
- robot
- mat
- camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000002405 diagnostic procedure Methods 0.000 title claims description 12
- 238000000034 method Methods 0.000 claims description 70
- 238000003745 diagnosis Methods 0.000 claims description 42
- 238000001514 detection method Methods 0.000 claims description 6
- 238000006243 chemical reaction Methods 0.000 claims description 5
- 230000033001 locomotion Effects 0.000 description 27
- 238000010586 diagram Methods 0.000 description 19
- 238000012545 processing Methods 0.000 description 13
- 210000002414 leg Anatomy 0.000 description 9
- 238000005259 measurement Methods 0.000 description 9
- 230000009466 transformation Effects 0.000 description 9
- 238000004891 communication Methods 0.000 description 8
- 230000015654 memory Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 210000003128 head Anatomy 0.000 description 7
- 239000011159 matrix material Substances 0.000 description 7
- 230000006399 behavior Effects 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 4
- 230000032683 aging Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000006467 substitution reaction Methods 0.000 description 3
- 241000282412 Homo Species 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000004397 blinking Effects 0.000 description 2
- 210000001217 buttock Anatomy 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000003252 repetitive effect Effects 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 102220479871 Protein FAM180A_S53A_mutation Human genes 0.000 description 1
- 208000004350 Strabismus Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 210000003414 extremity Anatomy 0.000 description 1
- 230000008921 facial expression Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 102220313179 rs1553259785 Human genes 0.000 description 1
- 102220276093 rs1555932427 Human genes 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 230000031068 symbiosis, encompassing mutualism through parasitism Effects 0.000 description 1
Images
























Description
ステレオ・カメラ診断用のテクスチャが設けられた略平面状の表面部と、
前記表面部に設けられた、前記ロボットと前記表面部との位置関係を指示する指示部と、
を具備することを特徴とするステレオ・カメラ診断用装置である。
所定のテクスチャを持つ診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいて取得した画像を基に距離画像を生成するステップと、
前記生成された距離画像から前記診断用マットの平面を検出するステップと、
前記検出した平面の平面度を測定し、該平面度が基準平面度より高いかどうかに応じて、ステレオ・カメラの性能を検証するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法である。
所定のテクスチャを持つ診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいて取得した画像を基に距離画像を生成するステップと、
ロボットの関節のキネマティクスを解くことによって、床面座標系を基準としたカメラ座標系への変換式を求め、該変換式に基づいてカメラ座標系を基準とした床面の平面の方程式を求めるステップと、
ステレオ・カメラによる距離値とキネマティクスによる平面とを比較することにより、ステレオ・カメラを診断するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法である。
均一のテクスチャに斜線が施された診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいて取得した画像を基に距離画像を生成するステップと、
斜線付近の距離値と基準平面を比較し、両者の差異に基づいてステレオ・カメラを診断するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法である。
所定のテンプレートを含んだテクスチャを持つ診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいて基準カメラ画像及び検出カメラ画像を取得するステップと、
基準カメラ画像中のテンプレートを、検出カメラ画像中でエピポーラ・ラインに沿って探索し、それぞれのテンプレートに対してエピポーラ・ラインに沿って、相関値を表すマッチング・スコアを得るステップと、
マッチング・スコア値と基準値の比較結果に基づいて、エピポーラ・ラインのずれを判定するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法である。
所定のテンプレートを含んだテクスチャを持つ診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいてキャリブレーションに必要な枚数の画像を取得するステップと、
取得した複数枚の画像を用いて前記ステレオ・カメラのキャリブレーション・パラメータを算出するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法である。
図1には、本発明に実施に供されるロボット装置1の機能構成を模式的に示している。同図に示すように、ロボット装置1は、全体の動作の統括的制御やその他のデータ処理を行なう制御ユニット20と、入出力部40と、駆動部50と、電源部60とで構成される。以下、各部について説明する。
本実施形態に係るロボット装置1は、ステレオ・カメラ15による距離測定に基づいて、作業空間に散在する障害物までの距離をより正確に把握してこれを回避したり、床面を特定したりその凹凸を認識して、歩行経路の修正や姿勢安定制御に活用することができる。
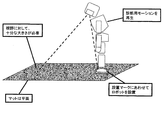
図9には、平面検出によるステレオ・カメラ診断処理の手順をフローチャートの形式で示している。診断用マットにロボットを載せた後(ステップS1)、所定のコマンドを入力することにより、ロボットは診断モーションを再生する(ステップS2)。このモーションによって、診断用マットを撮影するために適した姿勢をとる。

図10には、キネマティクスを解いて得られる平面と、ステレオ・カメラによる距離値を比較する方法の原理を示している。
ここで、ステレオ法の基本的な仕組みについて説明する。2台のカメラでステレオ・カメラ15が構成される場合、1つのカメラは基準カメラとして使用され、正面と正対した位置から対象物を撮像して、基準画像を出力する。また、他方のカメラは参照カメラとして使用され、斜め方向から対象物を撮像して、参照画像を出力する。図12には、撮像対象に対する基準カメラと参照カメラの配置を模式的に示しており、また、図13には、略正方形のパターンを基準カメラと参照カメラそれぞれによって撮像した場合の基準画像と参照画像を模式的に示している。
テンプレート・マッチング方法によるステレオ・カメラの場合、図14に示したように、基準カメラ画像中のテンプレートを、検出カメラ画像中でエピポーラ・ラインに沿って探索する。この際に、それぞれのテンプレートに対してエピポーラ・ラインに沿って、相関値を表すマッチング・スコアを得ることができる。図17には、マッチング・スコアの例として、輝度差の総和のグラフを示している。図示の例では、スコア値が低いほど、相関が高いことを表している。
(2)基準スコア値MthとMiを比較して、Mth<Miとなる点の数Noverをカウントする。
(3)基準個数NthとNoverを比較して、Nover<Nthとなる場合はエピポーラ・ラインのずれが小さく、Nth<Noverとなる場合はずれが大きいと判定する。
診断マット上でモーションを再生し、複数の角度や距離から得られたデータを用いて(図19を参照のこと)、ステレオ・カメラの診断性能を上げることができる。
本実施形態では、ステレオ・カメラを搭載したロボット装置が、診断用マットを撮影することによりカメラのキャリブレーションを行なう。
ステレオ法に基づいて複数台のカメラによる複数の画像から物体の距離を計測することは、カメラが持つ撮像光学系が理論と完全に一致する特性を持っていることを前提としている。このため、実写により取得した画像に対して所定の補正を施す必要である。例えば、カメラのレンズは一般に歪みパラメータを有し、観察点は理論上の点から変位した位置に結像される。したがって、カメラ特有のパラメータを算出し、射影変換に際してこのパラメータに従った画像データの補正を行なわなければ、正面画像から正確な射影画像を得ることができず、また、ステレオ法により正確な奥行き計測を行なうことができない。
15…CCDカメラ
16…マイクロフォン
17…スピーカ
18…タッチ・センサ
19…LEDインジケータ
20…制御部
21…CPU
22…RAM
23…ROM
24…不揮発メモリ
25…インターフェース
26…無線通信インターフェース
27…ネットワーク・インターフェース・カード
28…バス
29…キーボード
40…入出力部
50…駆動部
51…モータ
52…エンコーダ
53…ドライバ
Claims (14)
- 床面に接地する接地部位を備えるロボットに搭載されたステレオ・カメラの診断用装置において、
ステレオ・カメラ診断用のテクスチャが設けられた平面状の表面部と、
前記表面部上で前記ロボットの接地部位を配置する場所を指示する指示部と、
を具備することを特徴とするステレオ・カメラ診断用装置。 - 足部を有する1以上の可動脚を備えるロボットに搭載されたステレオ・カメラの診断用装置において、
ステレオ・カメラ診断用のテクスチャが設けられた平面状の表面部と、
前記表面部上で前記ロボットの足部の足底を設置する場所を指示する指示部と、
を具備することを特徴とするステレオ・カメラ診断用装置。 - 前記ステレオ・カメラ診断補助装置は折り畳み構造をなし、該折り畳み構造の開成時に平面状となり、前記表面部を露出する、
ことを特徴とする請求項1又は2のいずれかに記載のステレオ・カメラ診断用装置。 - 前記表面部は、テンプレート・マッチングによるステレオ・カメラ・システムの場合、テンプレート内のテクスチャが、エピポーラ・ライン上で正しくマッチングを行なえるようなテクスチャを備える、
ことを特徴とする請求項1又は2のいずれかに記載のステレオ・カメラ診断用装置。 - 前記表面部は、診断、キャリブレーションにおいて誤マッチングを避けられるようなテクスチャを備える、
ことを特徴とする請求項1又は2のいずれかに記載のステレオ・カメラ診断用装置。 - 前記表面部は、均一なテクスチャに斜線を入れたパターンを持つ、
ことを特徴とする請求項1又は2のいずれかに記載のステレオ・カメラ診断用装置。 - 前記表面部は、幾何形状が既知となるキャリブレーション・パターンを備える、
ことを特徴とする請求項1又は2のいずれかに記載のステレオ・カメラ診断用装置。 - ロボット装置に搭載されたステレオ・カメラの診断方法において、
所定のテクスチャを持つ診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいて取得した画像を基に距離画像を生成するステップと、
前記生成された距離画像から前記診断用マットの平面を検出するステップと、
前記検出した平面の平面度を測定し、該平面度が基準平面度より高いかどうかに応じて、ステレオ・カメラの性能を検証するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法。 - 前記のステレオ・カメラの性能を検証するステップでは、前記生成された距離画像に基づいて前記診断用マットを構成する平面の方程式を求め、前記診断用マットの各点と該平面との距離の偏差に基づいて、該平面度が基準平面度より高いかどうかを判定する、
ことを特徴とする請求項8に記載のロボット装置に搭載されたステレオ・カメラの診断方法。 - ロボット装置に搭載されたステレオ・カメラの診断方法において、
所定のテクスチャを持つ診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいて取得した画像を基に距離画像を生成するステップと、
ロボットの関節のキネマティクスを解くことによって、床面座標系を基準としたカメラ座標系への変換式を求め、該変換式に基づいてカメラ座標系を基準とした床面の平面の方程式を求めるステップと、
ステレオ・カメラによる距離値とキネマティクスによる平面とを比較することにより、ステレオ・カメラを診断するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法。 - ロボット装置に搭載されたステレオ・カメラの診断方法において、
均一のテクスチャに斜線が施された診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいて取得した画像を基に距離画像を生成するステップと、
斜線付近の距離値と基準平面を比較し、両者の差異に基づいてステレオ・カメラを診断するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法。 - ロボット装置に搭載されたステレオ・カメラの診断方法において、
所定のテンプレートを含んだテクスチャを持つ診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいて基準カメラ画像及び検出カメラ画像を取得するステップと、
基準カメラ画像中のテンプレートを、検出カメラ画像中でエピポーラ・ラインに沿って探索し、それぞれのテンプレートに対してエピポーラ・ラインに沿って、相関値を表すマッチング・スコアを得るステップと、
マッチング・スコア値と基準値の比較結果に基づいて、エピポーラ・ラインのずれを判定するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法。 - ロボット装置に搭載されたステレオ・カメラの診断方法において、
所定のテンプレートを含んだテクスチャを持つ診断用マット上に載せたロボットが該診断用マットを撮影するために適した姿勢をとるステップと、
前記ステレオ・カメラにおいてキャリブレーションに必要な枚数の画像を取得するステップと、
取得された複数枚の画像を用いて前記ステレオ・カメラのキャリブレーション・パラメータを算出するステップと、
を具備することを特徴とするロボット装置に搭載されたステレオ・カメラの診断方法。 - 前記のロボットが該診断用マットを撮影するために適した姿勢をとるステップは、
前記ステレオ・カメラの撮影画像中の診断対象となる領域に前記テクスチャが収まるように前記ステレオ・カメラの視線方向を探索するステップと、
該視線方向において、前記ステレオ・カメラの撮影画像内で診断対象となる領域を前記テクスチャが覆う大きさとなるように大きさを調整するステップと、
を備えることを特徴とする請求項8、10、11、12、13のいずれかに記載のロボット装置に搭載されたステレオ・カメラの診断方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004060113A JP4285279B2 (ja) | 2003-03-26 | 2004-03-04 | ロボットに搭載されたステレオ・カメラの診断用装置、並びにロボット装置に搭載されたステレオ・カメラの診断方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003086621 | 2003-03-26 | ||
| JP2004060113A JP4285279B2 (ja) | 2003-03-26 | 2004-03-04 | ロボットに搭載されたステレオ・カメラの診断用装置、並びにロボット装置に搭載されたステレオ・カメラの診断方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004306249A JP2004306249A (ja) | 2004-11-04 |
| JP2004306249A5 JP2004306249A5 (ja) | 2007-04-19 |
| JP4285279B2 true JP4285279B2 (ja) | 2009-06-24 |
Family
ID=33478347
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004060113A Expired - Lifetime JP4285279B2 (ja) | 2003-03-26 | 2004-03-04 | ロボットに搭載されたステレオ・カメラの診断用装置、並びにロボット装置に搭載されたステレオ・カメラの診断方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4285279B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007010419A (ja) * | 2005-06-29 | 2007-01-18 | Komatsu Engineering Corp | 対象物の3次元形状検証システム。 |
| KR100727033B1 (ko) * | 2005-12-07 | 2007-06-12 | 한국전자통신연구원 | 네트워크 기반 지능형 서비스 로봇의 비전 처리 장치 및방법과 이를 이용한 시스템 |
| JP5714232B2 (ja) * | 2009-03-12 | 2015-05-07 | オムロン株式会社 | キャリブレーション装置および3次元計測のためのパラメータの精度の確認支援方法 |
| US11699247B2 (en) * | 2009-12-24 | 2023-07-11 | Cognex Corporation | System and method for runtime determination of camera miscalibration |
| KR101658578B1 (ko) | 2010-01-27 | 2016-09-22 | 삼성전자주식회사 | 복합 센서의 캘리브레이션 장치 및 방법 |
| EP2619742B1 (en) * | 2010-09-24 | 2018-02-28 | iRobot Corporation | Systems and methods for vslam optimization |
| KR101594737B1 (ko) * | 2015-09-10 | 2016-02-17 | 충남대학교산학협력단 | 자율주행 콤바인의 영상시각 평가장치 |
| EP4007265A4 (en) | 2019-07-31 | 2024-01-10 | Canon Kk | IMAGE PROCESSING DEVICE, IMAGE PROCESSING METHOD, PROGRAM AND STORAGE MEDIUM |
| US20240058969A1 (en) | 2021-04-20 | 2024-02-22 | Fanuc Corporation | Robot |
-
2004
- 2004-03-04 JP JP2004060113A patent/JP4285279B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004306249A (ja) | 2004-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7373270B2 (en) | Diagnosing device for stereo camera mounted on robot, and diagnostic method of stereo camera mounted on robot apparatus | |
| KR101121763B1 (ko) | 환경 인식 장치 및 방법 | |
| US7769491B2 (en) | Obstacle avoiding apparatus, obstacle avoiding method, obstacle avoiding program, and mobile robot apparatus | |
| JP3855812B2 (ja) | 距離計測方法、その装置、そのプログラム、その記録媒体及び距離計測装置搭載型ロボット装置 | |
| JP3968501B2 (ja) | ロボットの自己位置同定システム及び自己位置同定方法 | |
| JP3945279B2 (ja) | 障害物認識装置、障害物認識方法、及び障害物認識プログラム並びに移動型ロボット装置 | |
| US20040230340A1 (en) | Behavior controlling apparatus, behavior control method, behavior control program and mobile robot apparatus | |
| CN103302666B (zh) | 信息处理设备和信息处理方法 | |
| US20130054025A1 (en) | Information processing apparatus, control method for information processing apparatus, and recording medium | |
| EP1120205A1 (en) | Robot | |
| JP7111114B2 (ja) | 情報処理装置、情報処理方法及び情報処理システム | |
| CN105818167A (zh) | 采用远距数字摄像头校准铰接的末端执行器的方法 | |
| JP2003285288A (ja) | 充電システム及び充電制御方法、ロボット装置、充電装置、及び充電制御プログラム及び記録媒体 | |
| JP4285279B2 (ja) | ロボットに搭載されたステレオ・カメラの診断用装置、並びにロボット装置に搭載されたステレオ・カメラの診断方法 | |
| JP2003266345A (ja) | 経路計画装置、経路計画方法及び経路計画プログラム並びに移動型ロボット装置 | |
| JP4535096B2 (ja) | 平面抽出方法、その装置、そのプログラム、その記録媒体及び撮像装置 | |
| WO2018043524A1 (ja) | ロボットシステム、ロボットシステム制御装置、およびロボットシステム制御方法 | |
| JP2003266349A (ja) | 位置認識方法、その装置、そのプログラム、その記録媒体及び位置認識装置搭載型ロボット装置 | |
| JP2003271975A (ja) | 平面抽出方法、その装置、そのプログラム、その記録媒体及び平面抽出装置搭載型ロボット装置 | |
| JP2007152472A (ja) | 充電システム、充電ステーション及びロボット誘導システム | |
| JP4227037B2 (ja) | 撮像システム及び校正方法 | |
| CN110977959B (zh) | 控制装置、机器人、控制方法以及存储介质 | |
| JP2004301796A (ja) | ロボット、並びにランドマークの位置推定システム及び位置推定方法、並びにランドマーク | |
| JP7249221B2 (ja) | センサ位置姿勢キャリブレーション装置及びセンサ位置姿勢キャリブレーション方法 | |
| JP7358108B2 (ja) | 情報処理装置、情報処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070301 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070301 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081125 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090303 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090316 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120403 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4285279 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120403 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120403 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130403 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130403 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140403 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |