JP4102187B2 - デジタル画像のフィーチャに応じて点の格子を整列する方法 - Google Patents
デジタル画像のフィーチャに応じて点の格子を整列する方法 Download PDFInfo
- Publication number
- JP4102187B2 JP4102187B2 JP2002548679A JP2002548679A JP4102187B2 JP 4102187 B2 JP4102187 B2 JP 4102187B2 JP 2002548679 A JP2002548679 A JP 2002548679A JP 2002548679 A JP2002548679 A JP 2002548679A JP 4102187 B2 JP4102187 B2 JP 4102187B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- grid
- points
- function
- lattice
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/20—Finite element generation, e.g. wire-frame surface description, tesselation
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Graphics (AREA)
- Geometry (AREA)
- Software Systems (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Measuring And Recording Apparatus For Diagnosis (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Color Television Systems (AREA)
Description
関連出願の相互参照
適用せず。
【0002】
背景
発明の分野
本発明は、デジタル画像の解析に関し、より詳細には、そのような画像から計算メッシュを構築することに関する。
【0003】
従来技術の説明
デジタル画像は、さらなる計算のためのメッシュを獲得するために解析されることが多い。例えば、地震画像は、地下油層の石油の流動をシミュレーションするために使用される地質メッシュを獲得するために解析される。同様に、人間の頭脳の医療画像は、動脈内血流をシミュレーションするために使用されるメッシュを獲得するために解析される。若干異なる例としては、後続画像の差を効率よく符号化するために、1つの画像から導出したメッシュを使用することのできる画像モーフィングがある。これらすべての応用例で、画像はメッシュを構築するために解析される。
【0004】
今日の画像およびメッシング
具体的には、このような応用例は、しばしば以下のステップのシーケンスから構成される。
(1)特定のフィーチャを強調するために画像を処理する。
(2)特定の領域を結合する画像内の曲線または表面を見つける。
(3)それらの領域によって決められた空間を計算メッシュで充填する。
(4)空間充填メッシュ上でいくつかのプロセスをシミュレーションする。
【0005】
医療画像処理の応用例に関しては、Cebral,J.R.およびLoehner R.著、From Medical Images to CFD Meshes,Proceedings of the 8th International Meshing Roundtable,p.321−331,Sandia,1999(「医療画像からCFDメッシュへ」第8回国際メッシング円卓会議議事録、321〜331頁、サンディア、1999年)を参照されたい。地震画像処理の応用例に関しては、Garrett,S.,Griesbach,S.,Johnson,D.,Jones,D.,Lo,M.,Orr,W.,およびSword,C.著、Earth Model Synthesis,First Break,v.15,no.1,p.13−20,1997(「地表モデル合成、初動」第15巻、1号、13〜20頁、1997年)を参照されたい。
【0006】
様々な理由から、このシーケンスの各ステップは、今日では、後続ステップの必要性をほとんど考慮せずにしばしば独立して行われている。例えば、ステップ(2)では、ステップ(4)で使用される空間充填メッシュで表すことのできるよりもさらに細部を有する結合曲線または表面を生成することが一般的である。地質境界面を表す地震反射は、通常、石油層のシミュレーションのために実際にメッシュで使用できるよりも高解像度でマッピングされる。これは、Garett他によって引用された「スケールアップ」または「アップスケーリング」の問題(1997年)に繋がる。
【0007】
解像度におけるこの矛盾には、データ構造における矛盾がしばしば伴う。例えば、ステップ(2)の線分の単純なリンク・リストによって表される2次元(2D)曲線は、ステップ(3)の三角形の比較的複雑なメッシュになる場合がある。このような矛盾は、今日では解析シーケンスを中断させ、いずれも定量化が困難な、ステップ(1)で処理された画像とステップ(4)で使用されたメッシュとの間に矛盾性をもたらす可能性がある。
【0008】
中断は犠牲が大きい。地震画像解析の例では、このシーケンスを1回反復するには今日では1ヶ月の作業を必要とする場合がある。このように犠牲が大きいために、解析結果の不確定性を評価するために複数回の反復を実行することは困難である。
【0009】
解像度とデータ構造で矛盾が生じる1つの理由は、解析シーケンスの実施にある。歴史的にみて、上記で列挙した4つのステップは、別個のコンピュータ・プログラムによって実行され、独立して開発され、異なる分野の専門家によって使用されてきた。今日では1人の人物または1つの小グループがこのシーケンスの4つのステップすべてを実行する場合があるので、これらのステップをより統合することが求められている。
【0010】
矛盾が生じるもう1つの理由は方法論の欠如である。シミュレーション・ステップ(4)は偏微分方程式(PDE)の数値解法を必要とすることが多い。かつて、これらの解法は、メッシュ要素に単純な配列として添数を付けることができる構造化されたメッシュにのみ実行可能であった。ステップ(3)で生成された構造化されていないメッシュから構造化されたメッシュへの変換によって、処理された画像とシミュレーションで使用されるメッシュとの間にさらなる矛盾性が生じる。しかし、構造化されていないメッシュ上でPDEを解く数値による方法の最近の進歩は、この変換とその結果生じる矛盾性とを避けることができることを示唆している。
【0011】
格子によるメッシュ
メッシュに関して実行される大部分の計算の精度は、メッシュ要素の正則(規則正しい、ということもある)性によって異なる。ほぼ等辺の三角形による非常に正則な三角形メッシュに関して実行されるシミュレーションは、細長い三角形による不規則メッシュに関して実行されるシミュレーションよりも精密である。
【0012】
これがDelaunay三角形分割が普及していることの1つの理由である。一組の点が2Dメッシュのノード位置を表すと仮定すると、それらの点のDelaunay三角形分割は、すべての他の実現可能な三角形分割と比較して最も等辺に近い三角形を生じる。しかし、Delaunay三角形分割だけでは、正則メッシュを保証しない。そのため、メッシュのノードの位置を慎重に選択する必要がある。
【0013】
(メッシングの問題に適用される2−D Delaunay三角形分割と3−D Delaunay三角形分割の概説は、Bern,M.,およびEppstein,D.著、Mesh Generation and Optimal Triangulation,in Computing in Euclidean Geometry,Du,D.−Z.およびHwang.,F.K.編集.,World Scientific,1995(「ユークリッド幾何学の計算におけるメッシュの生成と最適な三角形分割」)を参照されたい。)
【0014】
画像解析以外の分野では、最適なメッシュのノード位置を選択する問題は十分に研究されている。この問題に対する1つの解決法は、単純な結晶格子によって定義された一組の点の三角形分割が非常に規則正しいメッシュをもたらすという観測に基づいている。(Mello,U.T.,およびCavalcanti,P.R.著、A Point Creation Strategy for Mesh Generation Using Crystal Lattices as Templates,Proceedings of the 9th International Meshing Roundtable,p.253−261,Sandia,2000(「結晶格子をテンプレートとして使用したメッシュ生成の点生成戦略」第9回国際メッシング円卓会議議事録、253〜261頁、サンディア、2000年)を参照されたい。)しかし、点の一様の格子は、メッシングされる対象物の境界線とはめったに厳密に整列することはできない。したがって、いくつかの解決法は、ほぼ一様の格子で始まり、次いでメッシュのノード(アトムまたはバブル)をより最適な位置に自動的に移動するためにアトム間またはバブル間の物理的な力の数値モデルを使用する。(Shimada,K.著、Physically−Based Mesh Generation:Automated Triangulation of Surfaces and Volumes via Bubble Packing,Ph,D.thesis,Massachusetts Institute of Technology,1993(マサチューセッツ工科大学博士論文1993年「物理ベースのメッシュ生成:バブル・パッキングによる表面および体積の自動三角形分割」)と、Shimada,K.およびGossard,D.C.著、Bubble Mesh:Automated Triangular Meshing of Non−Manifold Geometry by Sphere Packing,in Proceedings of the Third Symposium on Solid Modeling and Applications,p.409−419,1995(「バブル・メッシュ:球パッキングによる非多様体形状の自動三角形分割メッシング」ソリッド・モデリングおよび装置に関する第3回シンポジウム議事録、409〜419頁、1995年)を参照されたい。)2000年のItoh,T.,Inoue,K.,Yamada,A.,およびshimada,K.らによるMeshing Method and Apparatusという名称の米国特許第6,124,857号はこの作業を四辺形メッシングに拡張している。Bossen,F.J.,およびHeckbert,P.S.著、A Pliant Method for Anisotropic Mesh Generation,Proceedings of the 5th International Meshing Roundtable,p.63−74,Sandia,1996(「非等方的メッシュ生成のための順応性のある方法」第5回国際メッシング円卓会議議事録、63〜74頁、サンディア、1996年も参照されたい。)
【0015】
これらの例のすべてにおいて、格子ベースのメッシングは、メッシングされるべき対象物の内部境界線と外部境界線とを正確に定義する幾何学モデルから始まる。したがって、そのような境界線を事前に知ることができない場合に問題に対処することのできるメッシング・システムおよび方法が求められている。
【0016】
【特許文献1】
米国特許第4,908,781号
1990年のLevinthal,C.,およびFine,R.らによるComputing Device for Calculating Energy and Pairwise Central Forces of Particle Interactions。
【特許文献2】
米国特許第5,596,511号
1997年のToyoda,S.,Ikeda,H,Hshimoto,E.,およびMiyakawa,N.らによるComputing Method and Apparatus for a Many−Body Problem。
【特許文献3】
米国特許第6,124,857号
2000年のItoh,T.,Inoue,K.Yamada,A.およびShimada,K.らによるMeshing Method and Apparatusという名称の
【非特許文献1】
Bentley,J.L.およびFriedman,J.H.著、Data Structures for Range Searching,(「範囲サーチのためのデータ構造」)Computing Surveys,vol.11,no.4,1979
【非特許文献2】
Bern,M.およびEppstein,D.著、Mesh Generation and Optimal Triangulation,in Computing in Euclidean Geometry,Du,D.−Z.およびHwang.,F.K.編集.,World Scientific,1995(「ユークリッド幾何学の計算におけるメッシュの生成と最適な三角形分割」)
【非特許文献3】
Bossen,F.J.,およびHechbert,P.S.著、A Pliant Method for Anisotropic Mesh Generation, Proceedings of the 5th International Meshing Roundtable,p.63−74,Sandia,1996(「非等方的メッシュ生成のための順応性のある方法」第5回国際メッシング円卓会議議事録、63〜74頁、サンディア、1996年)
【非特許文献4】
Byrd,R.H.,Nocedal,J.,およびSchnabel,R.B.著、Representations of Quasi−Newton Matrices and Their Use in Limited Memory Methods,Technical Report NAM−03,Northwestern University,Department of Electrical Engineering and Computer Science,1996(ノースウェスタン大学、電気工学およびコンピュータ・サイエンス学科、技術報告書NAM−03、1996年「準ニュートン・マトリックスの表現および限定されたメモリ方法でのそれらの用途」)
【非特許文献5】
Cebral,J.R.およびLohner,R.著、From Medical Images to CFD Meshes,Proceedings of the 8th International Meshing Roundtable,p.321−331,Sandia,1999(「医療画像からCFDメッシュへ」第8回国際メッシング円卓会議議事録、321〜331頁、サンディア、1999年)
【非特許文献6】
Garrett,S.,Griesbach,S.,Johnson,D.,Jones,D.,Lo,M.,Orr,W.,およびSword,C.著、Earth Model Synthesis,First Break,v.15,no.1,p.13−20,1997(「地表モデル合成、初動」第15巻、1号、13〜20頁、1997年)
【非特許文献7】
Mello,U.T.,およびCavalcanti, P.R.著、A Point Creation Strategy for Mesh Generation Using Crystal Lattices as Templates,Proceedings of the 9th International Meshing Roundtable,p.253−261,Sandia,2000(「結晶格子をテンプレートとして使用したメッシュ生成の点生成戦略」第9回国際メッシング円卓会議議事録、253〜261頁、サンディア、2000年)
【非特許文献8】
Shimada,K.著、Physically−Based Mesh Generation:Automated Triangulation of Surfaces and Volumes via Bubble Packing,Ph,D.thesis,Massachusetts Institute of Technology,1993(マサチューセッツ工科大学博士論文1993年「物理ベースのメッシュ生成:バブル・パッキングによる表面および体積の自動三角形分割」)
【非特許文献9】
Shimada,K.およびGossard,D.C.著、Bubble Mesh:Automated Triangular Meshing of Non−Manifold Geometry by Sphere Packing,Proceedings of the Third Symposium on Solid Modeling and Applications,ACM Press p.409−419,1995(「バブル・メッシュ:球パッキングによる非多様体形状の自動三角形分割メッシング」ソリッド・モデリングおよび装置に関する第3回シンポジウム議事録、ACM出版、409〜419頁、1995年)
【0017】
発明の概要
本発明の様々な実施態様による、デジタル画像のフィーチャに関する点の格子を生成する方法は、格子を初期設定するプロセスと、画像のフィーチャに対するその格子の整列を最適化するプロセスとを含む。最適化プロセスは、格子点の空間座標の合成関数を極値化(extremize)するために、格子の点を調整することによってオペレートする。合成関数は、点間の対になった距離の第1の関数と、画像から導出された(例えば、格子点付近の画像のサンプリングされた値から計算された)第2の関数との重み付けられた組合せである。
【0018】
メッシュは最適化された格子から生成することができる。メッシュは、様々な応用例のどれにでも使用することができる。例えば、メッシュは、画像に関連付けられたプロセスをシミュレートするために使用することができる。別の例として、メッシュは、画像シーケンス(例えば、ビデオ・ストリーム)の画像または後続画像を圧縮するために使用することができる。
【0019】
いくつかの実施態様では、最適化された格子は、中間メッシュの生成を伴い、または伴わないで、画像に関連付けられた情報を符号化するために使用することができる。様々なタイプの関連情報のどれかが企図される。
【0020】
目的および利点
本発明の少なくともいくつかの実施態様の1つの目的は、上記の画像解析シーケンス(従来技術の説明)を以下のさらに効率的なシーケンスに置き換えることを可能にする方法である。
(1)特定のフィーチャを強調するために画像を処理する。
(2)画像のフィーチャに整列した計算メッシュで空間を充填する。
(3)空間充填メッシュ上でいくつかのプロセスをシミュレーションする。
画像内の領域の境界線を発見してそれらの領域をメッシングするのではなく、境界線に整列したメッシュを構築するだけである。
【0021】
本発明のいくつかの実施態様のさらなる目的は、以下のものを構築するためにこの方法を使用することである。
偏微分方程式の解決法などのさらなる計算に適した非常に規則正しいメッシュ。
メッシュのノードの密度が画像の複雑さまたはユーザ指定関数によって異なるグレード付きメッシュ。
3D画像が使用可能な3Dメッシュ。
【0022】
本発明の様々な実施形態のこれらおよび他の目的および利点は、以下の説明および図面を検討することによってさらに明らかになろう。
【0023】
本発明には様々な変形形態および代替形態が可能だが、本発明の具体的な実施形態を一例として図面に示し、以下で詳細に説明する。しかし、図面およびその詳細な説明は開示した特定の形態に本発明を限定することを意図したものではなく、の特許請求の範囲で規定された本発明の趣旨および範囲に含まれるすべての変形形態、等価形態および代替形態を対象とすることを意図しているということを理解されたい。
【0024】
好ましい実施形態の詳細な説明
本明細書では、デジタル画像のフィーチャに関する点の格子を生成する方法を説明する。この方法は、点の格子を初期設定すること、および最適化することを含む。一組の実施形態では、最適化された格子の点は画像のフィーチャに整列する(一致する)傾向がある。第2の組の実施形態では、最適化された格子の点は、画像のフィーチャの上ではなくフィーチャに沿って整列する傾向がある。他の実施形態では、最適化された格子点は、1つの画像のあるフィーチャとは整列するが、他のフィーチャとは整列しない傾向がある場合がある。
【0025】
以下では、格子の点をアトムと呼ぶ。格子の初期設定のプロセスを結晶のアトム構造に関して説明する。同様に、格子の最適化をアトム格子のポテンシャル・エネルギーを最小限に抑えることに関して説明する。これらの物理モデルは、本発明者らの説明を理解し易くするが、本発明におけるアトムは単なる1つの点に過ぎない。
【0026】
図1は、本方法の主要なコンポーネント間におけるデータ・フローをさらに詳細に示す。データ入力コンポーネント100は、特定のフィーチャを強調表示するために他のどこかで既に処理された画像を生成する。ここで、画像とは、そのような処理の結果直接的に得られるか、またはコンピュータのメモリからロードされる。格子イニシャライザー200は、画像全体におよぶアトムの初期格子を作成する。格子オプティマイザー300は、格子が画像のフィーチャに整列するようにアトムを動かす。データ出力コンポーネント400は、最適化されたアトムの格子を他のプロセスに渡すか、コンピュータのメモリに格納して、最適化されたアトムの格子を消費する。
【0027】
格子オプティマイザー300は、ジェネリック関数ミニマイザー310とポテンシャル・エネルギー・コンピュータ320とを含んでいる。ジェネリック・ミニマイザー310は、多くの変数の最小限の関数を反復的にサーチする。そのサーチ中、ミニマイザーは、各変数に関して関数とその偏微分とを反復的に計算することを必要とする。ここで、変数は格子のアトムの空間座標である。アトムの座標とある画像が与えられると、ポテンシャル・エネルギー・コンピュータ320は、各アトムの座標に関して格子のポテンシャル・エネルギーとその偏微分とを計算する。
【0028】
ポテンシャル・エネルギーの計算
2次元(2−D)空間のアトムはx座標とy座標を有し、3次元(3−D)空間のアトムはx座標、y座標、およびz座標を有する。ベクトルxは、2−D(または3−D)空間の点のx空間座標とy空間座標(または、x、y、z)を示す。位置xiおよびxjの2つのアトムが与えられると、|xi−xj|はそれらの間の距離を示す。好ましい実施形態では、このアトム間距離を計算するために使用されるベクトル・ノルム|・|はユークリッド・ノルムである。しかし、この代わりに様々な他のノルムのどれでも使用することができる。
【0029】
対になったポテンシャル関数
計算効率に関しては、1つのアトムにその周辺のアトムが及ぼす合計の力が周辺のアトムのそれぞれが及ぼす力の単なる和となるように、本発明者らは、単なる対になった力の関数によってアトム間の相互作用をモデリングする。このように簡約化はされたが、対になった力の関数に関しては多くの適当な選択肢が存在する。
【0030】
同一の、またはほぼ同一の座標に複数のアトムを有しないようにするために、アトム同士が近接し過ぎている場合には、アトム間の力は斥力(正)であってよい。同様に、アトムのない大きな空間が生じないようにするために、アトム同士が離れすぎている場合には、アトム間の力は引力(負)であってよい。数値計算を容易にするために、力を有界とすることができる。格子内のアトムがすべての他のアトムに力を及ぼさないようにするために、カットオフ距離を超えると力は零であってよい。さらに、力の関数はアトム間の距離に応じて連続的であってよい。Shimadaによって提案された力の関数(1993年)はこれらの性質を有している。したがって、一組の実施形態では、本発明者らは後述するようにShimadaの力の関数を使用する。しかし、それらの性質と一致した様々な力の関数のどれでも使用することができる。
【0031】
dを、2つのアトム間で力が斥力から引力に移行する距離である、2つのアトム間の名目距離とする。この場合、xiとxjに配置された2つのアトム間の力fは三次多項式によって得ることができる。
【数1】

【数2】
【0032】
一般に、アトムに関する力はベクトルである。ここで、このベクトルの方向はf(u)の符号と、2つのアトムの位置xiおよびxjで示す。
【0033】
ベクトルの力の複数の成分によって作業するよりもスカラー・ポテンシャルによって作業する方が便利である。したがって、周知の慣例に従い、本発明者らはこの力がスカラー・ポテンシャルの勾配の負であると定義する。
【数3】
【0034】
ポテンシャル・エネルギーおよびポテンシャル・フィールド
正規化された距離uのポテンシャル関数φ(u)が与えられると、本発明者らはアトミック・ポテンシャル・エネルギーは、以下に示す対になったポテンシャルの和であると定義する。
【数4】
【0035】
本発明者らは、アトミック・ポテンシャル・エネルギーAをアトミック・ポテンシャル・フィールドの式でも定義する。
【数5】
【数6】
【0036】
同様に、本発明者らは画像ポテンシャル・エネルギーを
【数7】
【0037】
多くの状況で、画像ポテンシャル・フィールドは単なる画像(または、画像の滑らかになったバージョン)であり、通常、コンピュータ・メモリに格納された数の2−D(または3−D)配列によって表される。ここで、アトミック・ポテンシャル・フィールドと画像ポテンシャル・フィールドの類似性を強調するために(また、後で使用するために)、本発明者らは「ポテンシャル・フィールド」という用語を使用する。
【0038】
一組の実施形態では、画像ポテンシャル・フィールドが特定のフィーチャ内では最小値(例えば、b(x)≒−1)をとり、対象外の領域では最大値(例えば、b(x)≒0)をとるように画像が処理されているものと想定している。この場合、画像ポテンシャル・エネルギーBを最小限に抑えることは、その画像の特定のフィーチャに対応する最小値にアトムを移動させることに等しい。
【0039】
第2の組の実施形態では、画像ポテンシャル・フィールドが特定のフィーチャ内では最大値(例えば、b(x)≒1)をとり、対象外の領域では最小値(例えば、b(x)≒0)をとるように画像が処理されているものと想定している。この場合、画像ポテンシャル・エネルギーBを最小限に抑えることは、その画像の特定のフィーチャに対応する最大値からアトムを離すことに等しい。
【0040】
第3の組の実施形態では、画像ポテンシャル・フィールドは、画像のフィーチャの第1のサブセットに沿って最大値(例えば、b(x)≒1)を、画像のフィーチャの第2のサブセットに沿って最小値(例えば、b(x)≒−1)を、また画像のフィーチャから離れた中間値(例えば、b(x)≒0)をとることができる。
【0041】
より一般的には、本発明者らは、以下に示すアトミック・ポテンシャル・エネルギーと画像ポテンシャル・エネルギーの重みのついた和を最小限に抑えるようにアトムを移動させる。
P=P(x1、x2、...、xn)≡(1−β)A+βB (4)
これを本発明者らは合計ポテンシャル・エネルギーと呼ぶ。倍率βは、AおよびBの合計ポテンシャル・エネルギーPへの相対的な貢献を決定する。β=0の場合、アトムは画像と整列しない完全に正則な格子に傾く。β=1の場合、アトムは画像サンプル値にのみに反応する。すなわち、アトムは、引力に基づいてのみ画像の最小値へ移動しおよび/または斥力に基づいてのみ画像の最大値から移動する。したがって、アトムは、非常に不規則な格子を生じるように、画像内で最小値に集まり、最大値から退く傾向がある。典型的な場合には、本発明者らはβ≒1/2を選択し、ほぼ正則な格子を得かつ画像フィーチャを考慮した格子を得る。
【0042】
ポテンシャル・フィールドa(x)およびb(x)で表す合計ポテンシャル・エネルギーは
【数8】
p(x)≡(1−β)α(x)+βb(x) (5)
と定義すると、合計ポテンシャル・エネルギーは
【数9】
【0043】
名目距離関数d(x)と同様に、方程式(5)、(6)の倍率βは、位置xの滑らかに変化する関数であってよい。(d(x)に関しては、滑らかさはβ(x)の導関数が無視できることを意味している。)この一般化によって、格子の正則性と画像のフィーチャに対する反応(例えば、画像のフィーチャへの引力または画像のフィーチャからの斥力)のバランスを空間的に変化させることが可能になる。画像のフィーチャに対する格子の反応は、画像のある部分では他の部分よりも重要になる場合がある。本明細書では、簡約化のために本発明者らはβで定数倍率を示す。
【0044】
合計ポテンシャル・エネルギーPは、多くの極小値を有するアトムの座標x1、x2、...、xnの非二次関数である。(例えば、任意の2つのアトムの座標を交換してもPは変化しないということに留意されたい。)したがって、最小値、すなわち一般的には初期格子の座標に近接した値のサーチはどれも反復する必要がある。効率のよい反復的なサーチでは、Pの偏微分をアトムの座標に関して反復的に計算する必要がある。例えば、i番目のアトムのx座標に関してPが変化したと仮定する。
【数10】
【数11】
【0045】
計算
合計ポテンシャル・エネルギーPの計算には、その成分AおよびBの計算が必要である。方程式(3)に従って画像ポテンシャル・エネルギーBを計算するためには、アトム位置x=xiごとに画像ポテンシャル・フィールドb(x)を計算する必要がある。画像は、通常、一様にサンプリングされる。b(xi)に対する最も簡単で最も能率的な近似は、点xiに最も近い画像サンプルでの画像ポテンシャル・フィールドb(x)の値である。より精密な近似(補間)も可能だが、本発明者らは、本明細書に示す実施形態のすべてにおいてこの単純で高速な最も近傍の補間(nearest-neighbor interpolation)を使用した。方程式(3)は、Bを計算することのコスト(計算量)はO(n)であることを示している。ここで、nはアトム数とする。
【0046】
反対に、方程式(1)での二重和は、Aを計算する最も明瞭な方法のコストはO(n2)であることを示している。実際の応用例では、Aを計算するためのO(n2)コストがBを得るO(n)コストよりもかなり大きくなるように、nは十分に大きい。Aを計算するコストを低減するために、本発明者らは、カットオフ距離3/2よりも大きな正規化された距離uに対して零であるポテンシャル関数φ(u)の本発明者らの設計を利用することができる。位置x=xiに配置されるアトムに最も近いアトムだけが、その位置のアトミック・ポテンシャル・フィールドa(xi)に貢献する。
【0047】
この観測は、x=xiに配置されている各アトムの距離3/2d(xi)内にどの近傍アトムがあるかを決定する問題に導く。この問題の解は非自明解である。何故ならば、格子の最適化中にアトムは反復的に移動するからである。
【0048】
例えば、アトムごとに1つずつ近傍アトムのリストを作成する場合、アトムが移動するたびにこれらのリストを更新する必要がある(または、少なくともそれらのリストが更新を必要としているか否かを確認するためにチェックする必要がある)。ほぼ一定の密度を有する格子の場合、単純なデータ構造を使用してこのようなリストを構成し、更新するコストはO(mn)である。ここで、mはカットオフ距離内の近傍アトムの平均数である。可変密度格子の場合、より複雑なデータ構造が要求され、コストはO(mn・logn)となる。(例えば、Bentley,J.L.およびFriedman,J.H.著、Data Structures for Range Searching,(「範囲サーチのためのデータ構造」)Computing Surveys,vol.11,no.4,1979を参照されたい。また、1990年のLevinthal,C.,およびFine,R.らによるComputing Device for Calculating Energy and Pairwise Central Forces of Particle Interactionsという名称の米国特許第4,908,781号、および1997年のToyoda,S.,Ikeda,H,Hshimoto,E.,およびMiyakawa,N.らによるComputing Method and Apparatus for a Many−Body Problemという名称の第5,596,511号も参照されたい。)
【0049】
アトミック・ポテンシャル・フィールドa(x)に関してアトミック・ポテンシャル・エネルギーAの本発明者らの式は、より簡単な解法を示している。本発明者らは、方程式(2)を、画像ポテンシャル・フィールドb(x)のようにサンプリングされたアトミック・ポテンシャル・フィールドa(x)を計算する方法と解釈する。具体的には、本発明者らは、画像b(x)を表現するために使用される配列と同じ次元の2−D配列または3−D配列でa(x)を表現する。まず本発明者らは、サンプリングされたすべてのxに関してa(x)を零に初期化する。次いで、位置x=xjに配置されたアトムごとに、本発明者らは、サンプリングされたポテンシャル関数φ[|x−xj|/d(xj)]を集積する。この集積は、位置xjを中心とする半径3/2d(xj)の円(または球体)内のサンプルに空間的に限定される。ここで、サンプリングされたポテンシャル関数の貢献は零でない。
【0050】
図3aおよび3bは、それぞれに名目距離d=4およびd=8に対する2つのそのようなポテンシャル関数を示す。黒と白の間の中間調レベルは、それぞれに−0.05と0.05の間のサンプリングされた関数値に対応する。アトミック・ポテンシャル・フィールドa(x)は多くのそのような関数の集積である。計算効率に関しては、これらのサンプリングされたポテンシャル関数は事前に計算され、異なる名目距離dに関して一覧表にされる。次いで、任意の位置xに対するd(x)が与えられると、ポテンシャル関数の適切な値は表サーチ(または表サーチと補間)によって効率的に決定することができる。
【0051】
好ましい実施形態
本発明者らの分析により、合計ポテンシャル・エネルギーとその偏微分を計算するための2つの極めて異なるアルゴリズムが提案された。本発明の好ましい実施形態は、合計ポテンシャル・フィールドp(x)を計算するために式(2)、(5)を使用し、次いで合計ポテンシャル・エネルギーを計算するために式(6)を使用し、その偏微分を計算するために式(10)を使用する。以下に示す擬似コード・リストはこのアルゴリズムを詳細に説明する。
アルゴリズム1:P、∂P/∂xi、∂P/∂yiおよび∂P/∂ziを計算する。
101: 合計ポテンシャル・フィールドp(x)=βb(x)を初期化する
102: すべてのアトム位置xj=x1、x2、...、xnに関して{
103: |x−xj|<3/2d(xj)のようなすべてのxに関して{
104: p(x)=p(x)+(1−β)φ[|x−xj|/d(xj)]を集積する
105: }
106: }
107: 合計ポテンシャル・エネルギーP=0を初期設定する
108: すべてのアトム位置xj=x1、x2、...、xnに関して{
109: P=P+1/2[p(xi)+βb(xi)]を集積する
110: ∂P/∂xi=1/2[p(xi+1、yi、zi)−p(xi−1、yi、zi)]を計算する
111: ∂P/∂yi=1/2[p(xi、yi+1、zi)−p(xi、yi−1、zi)]を計算する
112: ∂P/∂zi=1/2[p(xi、yi、zi+1)−p(xi、yi、zi−1)]を計算する
113: }
【0052】
行101から106は、画像ポテンシャル・フィールドb(x)のようにサンプリングされた合計ポテンシャル・フィールドp(x)を計算する。このフィールドが与えられると、行107から113は、合計ポテンシャル・エネルギーPとその偏微分∂P/∂xi、∂P/∂yi、∂P/∂ziを計算する。行109では、アトム位置xiでの合計ポテンシャル・フィールドと画像ポテンシャル・フィールドは、上記のように、最も近い画像サンプル位置での対応するフィールド値を選択するか、または任意の所望の補間スキームによって近似することができる。行110〜112の偏微分は単純な中心化有限差分(centered-finite-difference)の近似値を使用して合計ポテンシャル・フィールドから計算されるが、導関数に対する代替の(例えば、高位の)数値近似値を代わりに使用することもできる。明確性のために、このリストは3−D座標空間とする。2−D空間に関しては、z座標と偏微分∂P/∂ziとを単純に無視する。
【0053】
アトム位置が名目距離関数d(x)と一致すると仮定すると、アルゴリズム1の計算コストはO(N)である。ここで、Nは画像内のサンプル数である。本発明者らが画像のような合計ポテンシャル・フィールドをサンプリングすること、およびその各アトムが、そのアトムの最も近くにある合計ポテンシャル・フィールドのそれらのサンプルに対して空間的に限定されたポテンシャル関数(図3に類似の)を与えることを想起されたい。したがって、すべてのアトムからの貢献を集積するコストは、そのフィールドのサンプル数Nに比例する。
【0054】
このアルゴリズムのコストは従来の画像処理のコストに相当し、画像を表現する単純な配列ほど複雑でないデータ構造を必要とする。さらに、このコストは、非定数名目距離関数d(x)の場合は定数名目距離dの場合と同じである。
【0055】
代替形態
本発明の一代替形態は、合計ポテンシャル・フィールドを計算しない。そうではなく、この代替形態は、合計ポテンシャル・エネルギーを計算するために式(1)、(3)、(4)を使用し、その偏微分を計算するために式(7)、(8)、(9)を使用する。以下に示す擬似コード・リストはこのアルゴリズムを詳細に説明する。
アルゴリズム2:P、∂P/∂xi、∂P/∂yi、∂P/∂ziを計算する。
201: 合計ポテンシャル・エネルギーP=0を初期化する
202: すべてのアトム位置xj=x1、x2、...、xnに関して{
203: P=P+βb(xj)を集積する
204: ∂P/∂xi=1/2β[b(xi+1、yi、zi)−b(xi−1、yi、zi)]に初期設定する
205: ∂P/∂yi=1/2β[b(xi、yi+1、zi)−b(xi、yi−1、zi)]に初期設定する
206: ∂P/∂zi=1/2β[b(xi、yi、zi+1)−b(xi、yi、zi−1)]に初期設定する
207: |xi−xj|<3/2d(xi)のようなすべてのアトム位置xjに関して{
208: P=P+1/2(1−β)φ[|xi−xj|/d(xi)]を集積する
209: Δ=(1−β)φ’[|xi−xj|/d(xi)]/[d(xi)|xi−xj|]を計算する
210: ∂P/∂xi=∂P/∂xi+Δ(xi−xj)を集積する
211: ∂P/∂yi=∂P/∂yi+Δ(yi−yj)を集積する
212: ∂P/∂zi=∂P/∂zi+Δ(zi−zj)を計算する
213: }
214: }
【0056】
アトムごとに、合計ポテンシャル・エネルギーPに、近傍アトムごとに、行203は画像ポテンシャル・エネルギーBを集積し、行208はアトミック・ポテンシャル・エネルギーAを集積する。同様に、行204から206、および行210から212は、画像とアトミック・ポテンシャル・エネルギーとの偏微分の、合計ポテンシャル・エネルギーの偏微分に対する貢献を集積する。
【0057】
行207は、x=xiに配置されているアトムに最も近い近傍アトムを迅速に決定することを可能にする補助データ構造を使用することを意味している。このデータ構造は、アトムが移動するたびに再構築または何らかの形で更新される必要がある。アトムは、合計ポテンシャル・エネルギーを最小化するアトム座標を計算するどのような反復的なサーチにおいても反復的に移動する。したがって、このデータ構造を維持するコストは膨大になる可能性がある。最も効率のよいデータ構造の場合、このコストは、定数名目距離dの場合よりも非定数名目距離関数d(x)の場合の方が高い。
【0058】
格子の初期設定
上記の通り、合計ポテンシャル・エネルギーPは、多くの極小値によるアトムの座標の非二次関数である。格子の最適化中、本発明者らは最小値を探してアトムを反復的に移動させる。実際には、本発明者らはグローバル最小値を探さず、発見もしない。それよりも、本発明者らは、初期格子に近いアトムの最適化された格子を発見する。したがって、初期格子は以下のようであることが望ましい。
アトミック・ポテンシャル・エネルギーを(局部的に)最小にし、
非常に正則であり、
名目距離関数d(x)と一致している。
【0059】
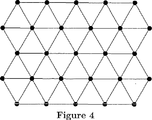
定数名目距離
定数名目距離dの場合、本発明者らは、初期格子をその性質によって容易に構築することができる。図4に、2−D空間の場合のそのような格子を示す。この理想的な格子で、等辺三角形を形成するようにアトムを結合することができる。任意のアトムとその6個の最も近い近傍アトムとの距離は単純に定数名目距離dである。この距離で、任意の1つのアトムが別のアトムに及ぼした力は正確に零であり、アトミック・ポテンシャル・エネルギーは局部的に最小にされる。
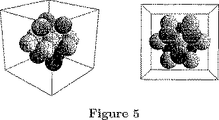
【0060】
図5に、3−D空間の場合の正則な格子を示す。これは、面心立方(FCC)格子であり、この中でアトムは図4の2−D格子のような水平の層で構成されるが、各層は上下の層の穴を充填するよう僅かにシフトされる。図5を分かり易くするために、異なる層のアトムは、異なる階調色の球体でレンダリングする。任意のアトムとその12個の最も近い近傍アトムとの距離は定数名目距離dに等しい。
【0061】
2−D空間を完全に充填することのできる(図4のような)等辺三角形とは反対に、等辺四面体は3−D空間を充填することはできない。しかし、非常に正則な四面体を得るためにFCC格子のアトムを三角形にすることができる。
【0062】
可変名目距離
アトムの初期構成は、定数でなく名目距離の関数d(x)の場合にはさらに困難である。
【0063】
第1の煩雑さとしては、そうでない場合には指定されるはずの関数d(x)を計算しなければならないということである。この関数を計算する方法の一例として、図6に示す画像(すなわち、画像ポテンシャル・フィールドb(x))を想定する。この画像は、断層すなわち表層地質の不連続を強調表示するように処理された3D地震画像(図示せず)の水平スライスである。この画像の黒い線状に延びるフィーチャは、この水平スライスを横切る断層の跡を表している。断層はほぼ垂直で、この水平スライスに対してほとんど直交している。
【0064】
図7は、名目距離関数d(x)の推定値を得るために地震画像を滑らかにした結果を示している。図面の最も暗い領域はd=6サンプルの最小距離に対応しており、最も明るい領域はd=18サンプルの最大距離に対応している。これらの最小距離と最大距離とは、地震画像に見られた細部のレベルに基づいて明示的に指定された。距離は画像の中央から左の部分では短くなり、下方右部分では長くなる。平均距離は約9.7サンプルである。
【0065】
いくつかの応用例では、名目距離関数d(x)を明示的に指定しても、または画像彩色用のコンピュータ・プログラムを使用して反復的に構築してもよい。本発明に関しては、関数d(x)を計算する実際の方法は重要ではない。上記のように、本発明者らは、この関数が滑らかであること、すなわち|∇d|<<1であることだけを必要とする。
【0066】
第2の煩雑さとしては、名目距離関数d(x)と一致する格子のアトムを構成することである。ここで、本発明者らは、この構成に対する2つのアルゴリズムを説明する。
【0067】
好ましい実施形態
本発明の好ましい実施形態は、擬似正則格子を生成するためのアルゴリズムを使用する。以下に示す擬似コード・リストはこのアルゴリズムを詳細に説明する。
アルゴリズム3:擬似正則格子を初期設定する
301: ブーリアン・フラッグw(x)=falseの画像のような配列を初期設定する
302: アトムの空のリストを構築する
303: アトムの場所の空のキューを構築する
304: 画像の中心の位置xiをそのキューに付ける
305: キューが空でない場合{
306: そのキューから第1の場所xiを得て、除去する
307: xiが画像の座標境界内にある場合、{
308: sphere=xiを中心として直径γd(xi)の球体の範囲を設定する
309: sphere内のすべてのサンプルに関してw(x)=falseの場合、{
310: sphere内のすべてのサンプルに関してw(x)=trueを設定する
311: 座標xiを有するアトムをリストに付け加える
312: 近傍アトムに対する理想的な場所をキューの最後に付け加える
313: }
314: }
315: }
【0068】
行301で初期化された配列w(x)は、画像の次元に等しい次元の一時作業配列である。この唯一の目的は、格子のアトムがアルゴリズムによって生成された際にその格子のアトムの位置をマーク付けすることである。(行309のテストは、このようにマーク付けされた位置が再度マーク付けされないことを保証する。)本発明の好ましい実施形態では、追加のメモリが必要ないように、この配列はアルゴリズム1で合計ポテンシャル・フィールドp(x)を格納するために使用された配列と同じであってよい。図8は、図7に示した名目距離関数に関して計算された配列w(x)の一例を示す。
【0069】
図8の各円形領域はアトム位置を中心としており、そのアトム位置の名目距離関数d(x)の値に比例した直径を有している。比例定数はこのアルゴリズムの行308では因数γである。この因数が1より小さくなるよう選択することによって、本発明者らは、他のアトムがさらに遠ざかることになると認識しながら、初期格子のいくつかのアトムが名目距離関数d(x)が示すよりもさらに接近し合うことを可能にする。本発明者らは、因数γ=0.8が、滑らかな名目距離関数d(x)と一致する擬似正則格子をもたらすことを実験的に決定した。
【0070】
行312の理想的な場所は、図4および図5に示す正則な格子の近傍アトムの位置である。(これらの近傍アトムまでの距離はγによってはスケールされない。)したがって、定数dの場合、アルゴリズム3は、それらの1つのような正則な格子をもたらす。非定数d(x)の場合、アルゴリズム3は擬似正則格子をもたらす。
【0071】
いずれの場合でも、キューに配置された理想的な場所の処理によって、格子はキューに配置された第1の場所から外部へ向けて成長する。したがって、第1の場所は、そこから格子が成長するシードとして機能する。アルゴリズム3の行304は、第1の場所が画像の中心になることを選択する。代わりのシード位置を使用することもできる。例えば、流量のシミュレーション用のメッシュが所望の場合、格子の成長の因子を供給するために1つまたは複数の流出源位置を使用することができる。別の例として、画像のフィーチャの重心をシード位置として選択することができる。
【0072】
図9に示すメッシュは、アルゴリズム3と図7で示した名目距離関数とを使用して作成された擬似正則初期格子のDelaunay三角形分割である。初期格子のこのメッシュの三角形のほとんどは非常に規則正しいが、ここで示す完全なDelaunay三角形分割は格子点の凸閉包(convex hull)に近接したいくつかの細長い三角形をもたらす。メッシュの境界線付近のこのような不規則な三角形は、後続の計算では単純に無視することができる。
【0073】
代替形態
本発明の代替形態は、擬似ランダム初期格子を生成するために全く異なるアルゴリズムを使用する。以下に示す擬似コード・リストはこのアルゴリズムを詳細に説明する。
アルゴリズム4:擬似ランダム格子を初期設定する
401: アトムの空のリストを構築する
402: 画像によってサンプリングされたすべてのxに関して{
403: d=d(x)を設定する
404: 2−Dの場合、ρ=2/√3d2を設定する
405: 3−Dの場合、ρ=2/√2d3を設定する
406: [0:1]で一様に分布された擬似乱数γを生成する
407: γ<ρの場合、xに配置されたアトムをリストに加える
408: }
【0074】
このアルゴリズムの行404(2−D画像の場合)または405(3−D画像の場合)は、名目距離関数d(x)の値に対応する名目格子密度ρを計算する。2D空間では、格子の密度はアトム間の距離の二乗に反比例し、3D空間では、距離の三乗に反比例する。2/√3(行404)と2/√2(行405)の比例定数は、それぞれに図4および5に示した理想的な格子に対応する。
【0075】
格子の密度は、アトムが画像によってサンプリングされた任意の位置に存在する確率である。行406と407は、その確率を有する格子にアトムを加えるために擬似乱数ジェネレータを使用する。このアルゴリズムは、区間[0:1]で一様に分布する擬似乱数を生成するために普及しているコンピュータ・ソフトウェアを使用する。
【0076】
この擬似ランダム・アルゴリズムは、擬似正則アルゴリズム3よりも単純で高速である。この擬似ランダム・アルゴリズムは、擬似正則格子によって示された対称の好ましい方向または平面なしに、完全に等方的な初期格子も生成する。応用例によって、これは有利になる場合と不利になる場合がある。
【0077】
残念ながら、擬似ランダム初期格子は非常に不規則である。このような格子のアトムは幾何学パターンを示さず、通常ならば有益な用語である「擬似ランダム格子」を矛盾したものにしてしまう。
【0078】
図10は、アルゴリズム4を使用して地震画像に対して生成された擬似ランダム初期格子に対応するメッシュを示す。このメッシュは、図7に示す名目距離関数と統計的に一致するが、等辺三角形とはかけ離れた多くの三角形を伴い非常に不規則である。格子の最適化によって、この擬似ランダム初期格子はより規則正しくなるが、図9に示した擬似正則初期格子の最適化よりもさらに多くの作業(さらに多くの反復)を必要とする。
【0079】
格子の最適化
格子オプティマイザーは、最適化された格子を得るために初期格子のアトムを移動させる。ある実施形態では、最適化された格子は規則正しく、初期格子よりも画像のフィーチャにさらに整列している。すなわち、画像のフィーチャから離れた最適化された格子のアトムは、名目距離関数に関する擬似正則構造に傾き、画像のフィーチャに近いアトムはそれらのフィーチャと一致する傾向がある。他の実施形態では、最適化された格子は規則正しく、初期格子よりも画像のフィーチャに沿って低密度である。格子オプティマイザーは、多くの変数の任意関数を最小化するために、普及しているコンピュータ・ソフトウェアを使用する。格子オプティマイザーは、アトムの座標の関数である格子合計ポテンシャル・エネルギーを最小化するためにこのソフトウェアを適用する。
【0080】
ジェネリック関数ミニマイザーに関しては様々な選択肢が可能である。好ましい実施形態では、本発明者らは制限されたメモリのBroyden−Fletcher−Goldfarb−Shanno(L−BFGS)ミニマイザーを使用する。(例えば、Byrd,R.H.,Nocedal,J.,およびSchnabel,R.B.著、Representations of Quasi−Newton Matrices and Their Use in Limited Memory Methods,Technical Report NAM−03,Northwestern University, Department of Electrical Engineering and Computer Science,1996(ノースウェスタン大学、電気工学およびコンピュータ・サイエンス学科、技術報告書NAM−03、1996年「準ニュートン・マトリックスの表現および限定されたメモリ方法でのそれらの用途」)を参照されたい。特に17頁の単純な2ループ漸化式に注目されたい。)他のミニマイザーと同様に、L−BFGS方法は、最小値をサーチする際に関数とその偏微分とを反復的に計算する。
【0081】
L−BFGSミニマイザーは、もう1つのよく知られた方法である共益勾配法よりも、多くのコンピュータのメモリを必要とするが、関数の評価は少なくてよい。しかし、画像を表すために必要になるメモリと比較して、必要となる追加のメモリは僅かである。さらに、各関数計算(格子の合計ポテンシャル・エネルギーの計算)のコストは、ミニマイザーが実行する他の計算よりも非常にコストが高い。したがって、L−BFGSミニマイザーは本発明には最適である。
【0082】
好ましい実施形態
本発明の好ましい実施形態は、格子の最適化のために以下に示すアルゴリズムを使用する。
アルゴリズム5:格子を最適化する
501: 初期格子アトムの座標x1、x2、...、xnを得る
502: ポテンシャル・エネルギー・コンピュータを構築する
503: ミニマイザーを構築する
504: 初期格子合計ポテンシャル・エネルギーPを計算する
505: これを実行する{
506: Po=Pを設定する
507: x1、x2、...、xnをランダムに摂動させる
508: これを実行する{
509: Pi=Pを設定する
510: x1、x2、...、xnを調整することによってミニマイザーをPだけ低減する
511: }Pi−P>ε|Pi|である間
512: }Po−P>ε|Po|である間
【0083】
このアルゴリズムは、アルゴリズム3によって生成された擬似正則格子またはアルゴリズム4によって生成された擬似ランダム格子のようなアトムの初期格子によって行501から始まる。アルゴリズムは次いで(行502で)、合計ポテンシャル・エネルギーPとその偏微分を計算することを担当するポテンシャル・エネルギー・コンピュータを構築する。アルゴリズムは次いで(行503で)、Pを最小化するためにポテンシャル・エネルギー・コンピュータを使用するミニマイザーを構築する。(ポテンシャル・エネルギー・コンピュータとミニマイザーの構築には、メモリの割り当てといくつかの変数と表の初期化とが含まれる。)アルゴリズムは次いで(行504で)、初期格子の合計ポテンシャル・エネルギーPを計算する。
【0084】
このアルゴリズムの残りは2つのネストされたループを含んでいる。行508で開始される内部ループは、合計ポテンシャル・エネルギーPを低減するために、ミニマイザーにアトムの座標x1、x2、...、xnを調整させる。このループは、Pの減少が、行511で小さいしきい値εによって決定されたほどに僅かになるまで続く。典型的なしきい値はε=0.001である。
【0085】
合計ポテンシャル・エネルギーは多くの極小値を有する関数であることを想起されたい。内部ループは現在のアトムの座標から始まり、それらの座標に最も近い最小値に傾く。本発明者らは、この極小値が、付近にある別の最小値の合計ポテンシャル・エネルギーよりも大きな合計ポテンシャル・エネルギーを有する場合があることを既に確認している。
【0086】
行505で始まる外部ループは、合計ポテンシャル・エネルギーPの減少が僅かになるまで、アルゴリズムがある極小値から別の極小値に移動することを可能にする。行507のアトムの座標のランダムな摂動は小さく、通常はアトム位置xiごとに名目距離d(xi)の10%よりも小さい。本発明者らは、これらの摂動を計算するために、普及している擬似乱数ジェネレータを使用する。内部最小化ループの後続の反復は、通常、合計ポテンシャル・エネルギーPを有意に減少させる。
【0087】
アルゴリズム5の内部ループと外部ループは収束のために同じテストを使用する。どちらのループも、合計ポテンシャル・エネルギーPの減少が僅かになると終了する。代わりの収束基準は多数の最適化で普及しており、ここでの本発明者らの選択は重要ではない。例えば、アトムの座標の最大の変化が何らかのしきい値よりも小さくなった場合にそれらのループを終了することができる。
【0088】
図11は、画像が画像のフィーチャに沿って−1に近い値を、また画像のフィーチャから離れて0の値を有するように処理されている場合に、地震画像に対する初期擬似正則格子を最適化した結果を示す。合計ポテンシャル・エネルギーPがアトミック・ポテンシャル・エネルギーと画像ポテンシャル・エネルギーとの重みのついた和であることを示す式(4)を想起されたい。この実施例で、本発明者らは、画像の重みβ=0.3を使用した。その結果最適化された格子は、非常に正則(ここでもまた、格子点の凸閉包付近の三角形は無視する)であり、画像のフィーチャによく整列している。
【0089】
小さいフィーチャまたは狭いフィーチャを有する画像の場合、画像の僅かに滑らかになったバージョンを使用してアルゴリズム5の第1の数回の反復を実行すると有益な場合がある。これらの第1の反復は、アトムが、通常ならば失われる可能性のあるフィーチャに近づくことを可能にする。何故ならば、それらのアトムは初期格子位置からは離れすぎているからである。最初にアトムは滑らかになったフィーチャに引き寄せられ、次いで後続の反復で元の滑らかになっていない画像の高解像度のフィーチャに引き寄せられる。
【0090】
曲線と表面の抽出
空間充填メッシュでは、曲線(2Dの場合)または表面(3Dの場合)は暗黙的に現れる。例えば、図11に示す2Dメッシュでは、三角形の線形エッジの任意の隣接シーケンスが曲線を表す。3D四面体メッシュでは、四面体の隣接する三角形の面の任意の結合が表面を表す。当然ながら、大部分のそのような曲線または表面は関心の対象ではない。何故ならば、それらは画像のフィーチャに整列していないからである。
【0091】
図12は、地震画像の断層と最も整列しているように表示される三角形のエッジを強調表示している。ここで示されるエッジは、エッジの下にあるすべての画像サンプル値が指定されたしきい値(−0.2)よりも小さいというだけで選択されたものである。個々のエッジ同士を接続する試みはなされなかった。しかし、多くのエッジが接続されて連続的な曲線を形成する。
【0092】
空間充填メッシュは、本実施例で使用する単純なしきい値分けよりもさらに手の込んだ曲線または表面の抽出アルゴリズムを容易にする。本発明の1つの結果として、本発明者らは新しい抽出アルゴリズムが開発されることを予想している。今日一般的に使用されている抽出(分離)アルゴリズムとは対照的に、これらの新しいアルゴリズムは空間充填メッシュと一致することが保証された曲線または表面を生成する。
【0093】
代替格子およびメッシュ
前述の実施例では、アトムが画像のフィーチャに引き寄せられるように画像ポテンシャル・フィールドが定義された。場合によっては、アトムが画像のフィーチャからはね返される擬似正則格子を作成することが望ましい。
【0094】
このような格子は、同じアトミック・ポテンシャル関数を有するが、画像のフィーチャに沿った最大値(例えば、1)と画像のフィーチャから離れた最小値(例えば、0)を獲得する画像ポテンシャル・フィールドを有する最適化アルゴリズム5を使用して獲得することができる。図13に、地震画像に対するそのような最適化の結果を示す。この最適化された格子のアトムは、画像のフィーチャの(上に重なるのではなく)脇に沿って並ぶ傾向がある。
【0095】
図13は、最適化された格子から生成されたVoronoiメッシュも図示している。このVoronoiメッシュはDelaunay三角形分割の双対である。したがって、アトムはメッシュ要素の頂点ではなくメッシュ要素内に位置する。最適化された格子内のアトムは画像のフィーチャに沿って並ぶ傾向があるので、Voronoiメッシュ要素の境界線はそれらのフィーチャ上に並ぶ傾向がある。
【0096】
Voronoiメッシュは、流量のシミュレーションを含めて多数の用途を有する。しばしば、Voronoiメッシュは偏微分方程式に対する定差解法(finite-difference solution)に導くが、単体の三角形/四面体メッシュは有限要素解法(finite-element solution)に導く。どちらのタイプの解法も今日では広範に使用されている。どちらのタイプの解法でも、メッシュ要素の境界線を画像のフィーチャに整列させることが望ましい。何故ならば、これらのフィーチャは物理的性質の不連続性に対応することがしばしばあるからである。
【0097】
より一般的には、ある画像内のある種のフィーチャに引き寄せられ、その他のフィーチャからははね返されるアトムの擬似正則格子を作成することが望ましい場合がある。例えば、その局部的な密度が人口密度に対応している正則パターンで通信用トランシーバを配置すると有利な場合がある。その同じトランシーバを標高の高い地域(例えば、山の尾根の上)に配置し、標高の低い地域(例えば、渓谷または川の流れる谷間)を避けるようにすることが望ましい場合がある。したがって、画像ポテンシャル・フィールドは、中間にある高地だけでなく最高と最低を含むことができる。
【0098】
さらなる実施例
本発明の方法は医療画像にも適用することができる。図14は、人体頭部の磁気共鳴画像(MRI)を示している。このデジタル画像は、Visual Human Projectの一部としてNational Library of Medicine(米国国立医学図書館)から自由に入手できる。
【0099】
図15は、エッジ、すなわち元のMRIの不連続性を強調表示する処理を施した後の画像を示している。単純でよく知られたPrewittエッジ強調アルゴリズムを使用した。このエッジを強調した画像は、本発明の方法で画像ポテンシャル・フィールドb(x)として使用することができる。
【0100】
図16は、図15の画像と整列させるために最適化させたメッシュを示している。地震画像の場合、画像を滑らかにすることによって非定数名目距離関数d(x)が計算された。名目距離値の範囲はd=4の最小値からd=12の最大値までである。画像の倍率はβ=0.4である。
【0101】
図17は、画像のエッジと最も整列したメッシュの線分を強調表示する。図示した線分は、地震画像に使用されたのと同じ単純なしきい値分けアルゴリズムを使用して選択されたものである。
【0102】
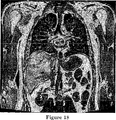
図18、19、20、21は、医療用撮像の別の例を示している。頭部の画像と同様、この人体の胴の画像もNational Library of Medicineから自由に入手できる。この画像に関する画像処理と格子の最適化は頭部画像の場合と同じであるが、ここでの名目距離値の範囲はd=5の最小値からd=15の最大値までである。
【0103】
コンピュータ・システム、記憶媒体、および方法の実施形態
デジタル画像のフィーチャに関する擬似正則格子を生成する本発明の方法は、デスクトップ・コンピュータ、ミニコンピュータ、ワークステーション、マルチプロセッサ・システム、各種パラレル・プロセッサ、分散型コンピュータ・ネットワークなどの様々なコンピュータ・システムのどれでも実施することができることに留意されたい。本発明の方法は、CD−ROM、磁気ディスク、バブル・メモリ、半導体メモリ(例えば、各種RAMまたはROMの任意のメモリ)などの様々な記憶媒体のどれかに格納されている1つまたは複数のソフトウェア・プログラムまたはモジュールで実現することができる。さらに、それら1つまたは複数のソフトウェア・プログラムおよび/またはそれらが生成する結果は、光ファイバ、メタリック・ワイヤ、自由空間などの様々な搬送媒体のどれかを介して、かつ/またはインターネットおよび/またはPSTN(公衆交換電話網)などの様々なネットワークのどれかを介して伝送することができる。
【0104】
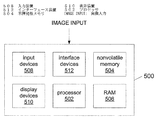
図22は、本発明の格子生成方法を実行するよう動作可能なコンピュータ・システムの一実施形態500を示す。コンピュータ・システム500は、プロセッサ502、メモリ(例えば、ランダム・アクセス・メモリ506および/または不揮発性メモリ装置504)、1つまたは複数の入力装置508、1つまたは複数の表示装置510、および1つまたは複数のインターフェース装置512を含む。これらのコンポーネント・サブシステムは様々な構成のどれかによって相互接続することができる。不揮発性メモリ装置504は、テープ・ドライブ、ディスク・ドライブ、半導体ROMまたはEEPROMなどの装置を含む。入力装置508は、キーボード、マウス、デジタイジング・パッド、トラックボール、タッチ検知パッドおよび/またはライト・ペンなどの装置を含む。表示装置510は、モニタ、プロジェクタ、ヘッドマウント・ディスプレイなどの装置を含む。インターフェース装置512は、1つまたは複数の獲得装置および/またはネットワークを介して1つまたは複数の遠隔コンピュータまたは記憶装置からデジタル画像データを獲得するように構成される。
【0105】
撮像中の対象物のタイプまたはプロセスに応じて、各種獲得装置のどれでも使用することができる。1つまたは複数の獲得装置は、様々な形態の力学的エネルギー(例えば、音響エネルギー、変位および/または歪み/変形)、および/または電磁エネルギー(例えば、光エネルギー、電磁エネルギー、電流、および/または電圧)のどれでも感知することができる。
【0106】
プロセッサ502は、RAM506および/または不揮発性メモリ・デバイス504からプログラム命令および/またはデータを読み取り、RAM506および/または不揮発性メモリ・デバイス504に計算結果を格納するように構成されている。このプログラム命令は、本明細書に記載の方法実施形態の任意の組合せに基づいて入力画像上に作用するようプロセッサ502に指示する。入力画像は各種機構のどれかによってコンピュータ・システム500に提供される。例えば、入力画像を、1つまたは複数のインターフェース装置512を使用して不揮発性メモリ504および/またはRAM506に獲得することができる。別の実施例として、入力画像を、不揮発性メモリ装置504の1つに挿入されるディスクまたはテープなどの記憶媒体を介してコンピュータ・システム500に供給することができる。この場合、入力画像を、コンピュータ・システム500または何らかの他のコンピュータ・システムによって記憶媒体に前もって記録しておく。
【0107】
入力画像は獲得デバイスによって得られた生センサー・データである必要はないことに留意されたい。例えば、入力画像は、生センサー・データの集合への1つまたは複数の処理動作の結果であってよい。1つまたは複数の前処理操作を、コンピュータ・システム500および/または1つまたは複数の他のコンピュータによって実行することができる。さらに、入力画像は、設計者がCADパッケージを使用して生成した画像の場合のように完全に独立したセンサー・データであってもよい。
【0108】
図23は、擬似正則であり、デジタル画像のフィーチャに関する点の格子を生成する方法の一実施形態600を示す。ステップ605では、画像(例えば、対象物および/またはプロセスの画像)を、コンピュータ・システム500の不揮発性メモリ504および/またはRAM506のようなローカルにアクセス可能なメモリに獲得する。ステップ610では、画像の特定のフィーチャを強調または露出するように前処理する。特定のフィーチャがステップ605で獲得された際の画像内で十分に鮮明な場合、ステップ610は省略することができる。(上述の通り、ステップ605で獲得された際の画像は既に前処理操作を受けている。)
【0109】
本発明は、ステップ610の前処理に関して任意の所望の処理技術または技術の組合せを使用することを想定している。例えば、画像は、エッジ検出、合成フィルタリング、フーリエ変換、非線形フィルタリング、しきい値分けなどを受けることができる。前処理は、デジタル画像のようにサンプリングされた画像ポテンシャル・フィールドを生成することができる。さらに、前処理は、名目距離関数d(x)を生成するために画像を操作することができる。前処理は、自動化しても、あるいはユーザ入力に対応させてもよい。例えば、ユーザは画像のフィーチャおよび/または対象の領域を強調表示することができる。
【0110】
ステップ615では、名目距離関数d(x)と一致する点の格子は、画像で張られた空間(the space spanned by the image)で初期設定することができる。この格子はアルゴリズム3またはアルゴリズム4の方法によって初期設定することができる。一代替形態では、名目距離関数と一致する初期格子は、零に等しいスケーリング・パラメータβによる格子最適化を数回反復することによって、長方形または等辺形格子のような安価な格子から生成することができる。しかし、格子を裂くことのないように、安価な格子のアトム間距離は名目距離関数の最小値に等しく設定することができる。別の一代替形態では、初期格子は、スケーリング・パラメータβに対する零でない値と、画像ポテンシャル・フィールドb(x)を置換する距離関数d(x)とによる格子最適化を数回反復することによって、安価な格子から生成することができる。
【0111】
ステップ620では、点の初期格子はアルゴリズム5によって最適化することができる。最適化された点の格子は、様々な用途のどれでも使用することができる。例えば、空間充填メッシュを生成するために格子を三角形分割することができ、メッシュは、メッシュ・ベースのシミュレーション(油層のシミュレーションなど)、画像符号化アルゴリズム、信号解析方法などを実行するために使用することができる。いくつかの実施形態では、最適化された格子は、メッシュを生成するステップを介在させずに1つの応用例によって使用することができる。
【0112】
結論、波及効果、および範囲
上記の実施例は、擬似正則であり、かつデジタル画像のフィーチャに対応した点の格子を生成する際の本発明方法の有用性を表している。最適化された格子は、画像細部の空間的に変動するレベルに合わせて可変の密度を有することができる。
【0113】
実施例は、そのような格子の三角形分割によって、画像のフィーチャによく整列した空間充填メッシュをもたらすことができることも証明した。このメッシュの非常に規則正しい要素によって、メッシュは流量シミュレーションなどの後続の計算に対する適切な枠組みとなる。
【0114】
格子の枠組みと画像の本発明者らの組合せは、フィーチャを抽出するための改善されたアルゴリズムの基礎として使用することができる。
【0115】
上記の実施例は2D画像を示しているが、本発明の方法は3D画像にも同様に適用することができる。必要に応じて、2次元と3次元の方程式とアルゴリズムの違いをそれらの説明の中で強調した。本発明の方法は、Nが0よりも大きな任意の整数である場合に、N次元の画像に必然的に一般化される。
【0116】
実施例の画像は、長方形の2Dグリッド上で一様にサンプリングされたものである。しかし、本方法が代替の画像トポロジーで動作する場合には様々な実施形態が想定される。例えば、球体表面上で2D画像をサンプリングすることができる。したがって、一実施形態では、本発明の方法は、そのような球体表面上で定義され、次いでその表面上に示された画像のフィーチャに整列した距離関数と一致する、球体表面上の点の擬似正則格子を生成することができる。各種次元での様々なトポロジーが想定される。
【0117】
本発明の方法は、最小化の問題に関して提示されたものである。関数fの最小化はその負の−fの最大化と等価であることは、明白な数理的事実である。したがって、格子の点(すなわち、アトム)間のアトム間距離の第1の関数と格子点の位置の第2の関数との組合せを含んでいる合成関数を最大化することによって格子の最適化が作用する場合には、代替形態が想定される。
【0118】
上記の説明は多くの具体的な詳細を含んでいるが、これらは本発明の範囲を限定するものと解釈されるべきではない。そうではなく、これらは、本発明の現在の好ましい実施形態の例を提供しているに過ぎない。例えば、単純な多項式の対になったポテンシャル関数は、類似の性質を有する他の関数で置き換えることができる。同様に、アトムの格子を初期設定するために、上記の2つのアルゴリズムに加えて様々なアルゴリズムを使用することができる。
【0119】
本発明の範囲は、上記の実施形態の例によってではなく、首記の特許請求の範囲およびその法的等価形態によって決定されるべきである。
【図面の簡単な説明】
【図1】 本発明の方法の主要コンポーネント間のデータ・フローを示す図である。
【図2】 任意の2つのアトム間の正規化された距離の、対になった(a)力と(b)ポテンシャル関数とを示す図である。
【図3】 名目距離(a)4および(b)8に関して、サンプリングされたアトミック・ポテンシャル・フィールドに対するあるアトムの貢献を示す図である。
【図4】 三角形分割されたアトムの6角形2D格子を示す図である。
【図5】 アトムの面心立方3D格子を示す図である。
【図6】 断層すなわち表層地質の不連続を強調するように処理された地震画像示す図である。
【図7】 格子のアトム間の所望の様々な空間を表す名目距離関数を示す図である。
【図8】 各アトムが、アトムの位置で評価された名目距離関数に比例した直径を有する円でマーク付けされている、格子内のアトムの初期擬似正則分布を示す図である。
【図9】 地震画像の擬似正則初期格子に対応したメッシュを示す図である。
【図10】 地震画像の擬似ランダム初期格子に対応したメッシュを示す図である。
【図11】 地震画像の最適化された格子に対応したメッシュを示す図である。
【図12】 地震画像のフィーチャに最も整列したメッシュのエッジを示す図である。
【図13】 地震画像のフィーチャによってアトムがはね返される最適化された格子に対応するVoronoiメッシュを示す図である。
【図14】 人体頭部の磁気共鳴画像(MRI)を示す図である。
【図15】 エッジフィーチャを強調するために処理された人体頭部の画像を示す図である。
【図16】 人体頭部の画像のフィーチャに整列したメッシュを示す図である。
【図17】 人体頭部の画像のフィーチャに最も整列したメッシュのエッジを示す図である。
【図18】 人体の胴の磁気共鳴画像(MRI)を示す図である。
【図19】 エッジフィーチャを強調するために処理された人体の胴の画像を示す図である。
【図20】 人体の胴の画像のフィーチャに整列したメッシュを示す図である。
【図21】 人体の胴の画像のフィーチャに最も整列したメッシュのエッジを示す図である。
【図22】 本発明の方法を実施するために使用されるコンピュータ・デバイスのコンポーネントを示す図である。
【図23】 本発明の方法の一実施形態を示す図である。
Claims (58)
- コンピュータ・システムにおいてN次元のデジタル画像のフィーチャに関する点のN次元の格子を生成するための、Nは零よりも大きな整数である、方法であって、
前記コンピュータ・システムが、
プロセッサと、
前記プロセッサに結合されており、プログラム命令を格納するように構成されているメモリと、そして
前記メモリに画像を提供するための入力ポートと
を含み、
前記プロセッサが、前記メモリから前記プログラム命令を読み取って実行し、前記プログラム命令の前記実行に応答して、前記画像によってサンプリングされた空間の部分で前記点の前記格子を初期設定するステップと、そして
前記プロセッサが、前記点の空間座標の合成関数を極値化すべく前記点の移動を行うことによって前記格子を最適化するステップと
を含み、
前記合成関数が、対になった前記点間の距離の第1の関数と、前記点に近い前記画像のサンプリングされた値の第2の関数との重みのついた組み合わせであり、
前記第1の関数が、前記対になった前記点間の距離の正確に1つに対応する項の和であり、
点の前記最適化された格子が、前記画像に関連付けられたプロセスのシミュレーション用メッシュを生成するために使用可能である、
方法。 - 前記重みのついた組み合わせの重みが、前記格子の正規性の所望の程度と前記画像の前記フィーチャに対する前記格子の応答度の所望の程度を釣り合わせるために選択される請求項1に記載の方法。
- 点の格子から空間充填メッシュを生成するステップをさらに含む請求項1に記載の方法。
- メッシュがN次元のメッシュ要素を含み、前記方法が、前記メッシュ要素の空間の部分の境界線の結合を識別するステップをさらに含み、境界線の前記結合が、前記画像の対象領域間の境界線に対応する請求項3に記載の方法。
- 前記初期設定するステップが、前記格子の点ごとに、前記格子の前記点から前記点の近くの前記格子の他の点までの好ましい距離を指定する距離関数を使用する請求項1に記載の方法。
- 点の格子を初期設定する前記ステップが、
キューから第1の仮格子点を読み取るステップと、
格子の現在の状態の格子点が前記第1の仮格子点の周囲の第1の近傍にあるか否かを判定するために、第1の近傍を検査するステップと、
第1の近傍が格子の現在の状態の格子点を含んでいない場合、
第1の仮格子点を格子に加えるステップと、
新しい仮格子点をキューに付け加えるステップであって、前記新しい仮格子点が、第1の仮格子点と距離関数とに関して厳密に正則な格子に対応する、割り当てられた座標位置であるステップと
を含む更新動作を実行するステップと
を含む請求項5に記載の方法。 - キューに1つまたは複数のシード点を格納するステップと、
前記読み取るステップと、前記検査するステップと、前記更新動作を条件付きで実行するステップとを、前記空間の部分が充填されるまで反復的に実行するステップと
をさらに含む請求項6に記載の方法。 - 点の格子を初期設定する前記ステップが、前記画像によってサンプリングされた位置で前記格子に点をランダムに加えるステップを含み、前記サンプリングされた位置の1つで前記格子に点を加える確率が、前記1つのサンプリングされた位置で評価された距離関数によって判定される請求項5に記載の方法。
- 前記点の格子を最適化する前記ステップが第1の関数の値を計算するステップを含み、第1の関数の値を計算する前記ステップが、
局部的な関数の値を得るために、格子点の近傍の画像サンプル位置で関数の形式を求めるステップと、
局部的な関数の値を、アトミック・ポテンシャル・フィールドを表現する配列の対応するサンプルに加えるステップと、
前記求めるステップと前記加えるステップとを格子点ごとに反復的に実行するステップと、
アトミック・ポテンシャル・フィールドを表現する配列の1つまたは複数のサンプルに基づいて、格子点のそれぞれに対応するアトミック・ポテンシャル・フィールド値を計算するステップと、
第1の関数の値を決定するために、格子点ごとにアトミック・ポテンシャル・フィールド値を加えるステップと
含む請求項1に記載の方法。 - 関数の形式が、格子点の近傍で評価された名目距離関数によって分割された格子点からの距離の関数を含む請求項9に記載の方法。
- 前記点の格子を最適化する前記ステップが、前記点の前記空間座標のそれぞれに関して前記合成関数の導関数を計算するステップと、前記導関数に基づいて前記点の前記空間座標に対する更新された一組の値を決定するステップとをさらに含む請求項1に記載の方法。
- 画像が、前記画像の前記フィーチャの少なくとも1つの空間の部分に沿った極小値を得る請求項1に記載の方法。
- 画像が、前記画像の前記フィーチャの少なくとも1つの空間の部分に沿った最大値を得る請求項1に記載の方法。
- コンピュータにおいてシミュレーション用のオブジェクトの表現を生成するための方法であって、
前記コンピュータが、
プロセッサと、
前記プロセッサに結合されており、プログラム命令を格納するように構成されているメモリと、そして
前記メモリにオブジェクトの画像を提供するための入力ポートと
を含み、
前記プロセッサが、前記メモリから前記プログラム命令を読み取って実行し、前記プログラム命令の前記実行に応答して、オブジェクトの画像を獲得するステップと、
前記プロセッサが、画像によってサンプリングされた空間で点の格子を初期設定するステップと、そして
前記プロセッサが、点の空間座標の合成関数を極値化するために1回または複数回点の位置を調整するステップと
を含み、
合成関数が、対になった点間の距離の第1の関数と、点に近い前記画像のサンプリングされた値の第2の関数との重みのついた組み合わせであり、
前記第1の関数が、前記対になった前記点間の距離の正確に1つに対応する項の和であり、
1回または複数回位置を調整する前記ステップが、前記オブジェクトに関連付けられたプロセスのシミュレーション用のメッシュを生成するために使用可能な最終的な点の格子を生成する、
方法。 - 前記オブジェクトが、1つまたは複数の流体の地下貯留層を含み、シミュレーションが、前記メッシュに基づく前記流体の流れのシミュレーションを含む請求項14に記載の方法。
- 前記対になった距離が前記格子点の1つの対に対応し、対になった距離が、(a)格子点の対の点間距離と、(b)格子点の対の近傍で評価された名目距離関数の値との比率を含む請求項14に記載の方法。
- コンピュータにおいて画像から格子を生成するための方法であって、
前記コンピュータが、
プロセッサと、
前記プロセッサに結合されており、プログラム命令を格納するように構成されているメモリと、そして
前記メモリに画像を提供するための入力ポートと
を含み、
前記プロセッサが、前記メモリから前記プログラム命令を読み取って実行し、前記プログラム命令の前記実行に応答して、画像によってサンプリングされた空間の少なくとも1つの部分で点の格子を初期設定するステップと、そして
合計ポテンシャル・エネルギーの極値に向かって収束するように、空間で格子の点の位置を1回または複数回調整するステップと
を含み、
前記合計ポテンシャル・エネルギーが、格子のアトミック・ポテンシャル・エネルギーと格子の画像ポテンシャル・エネルギーの組み合わせを含み、
画像ポテンシャル・エネルギーが、画像と格子点の位置から計算され、
1回または複数回位置を調整する前記ステップが、画像に関連付けられた情報を符号化するために使用可能な最終的な点の格子を生成する、
方法。 - 画像ポテンシャル・エネルギーが画像ポテンシャル・フィールド値の和を含み、前記画像ポテンシャル・フィールド値のそれぞれが、格子点の1つの画像ポテンシャル・フィールドの評価値に対応する請求項17に記載の方法。
- 画像が対象のフィーチャを含み、前記方法が、画像ポテンシャル・フィールドが前記対象のフィーチャの1つまたは複数に沿った第1のポテンシャル値と、前記対象のフィーチャから離れた第2のポテンシャル値とを得るために、画像を処理することによって画像ポテンシャル・フィールドを生成するステップをさらに含む請求項18に記載の方法。
- 第1のポテンシャル値が最大ポテンシャル値である請求項19に記載の方法。
- 第1のポテンシャル値が最小ポテンシャル値である請求項19に記載の方法。
- アトミック・ポテンシャル・エネルギーが前記格子点の対に対するアトミック・ポテンシャルの和を含む請求項17に記載の方法。
- 前記格子点の前記対の1つに対するアトミック・ポテンシャルが対の点間の正規化された距離の関数であり、正規化された距離が、対の点間の正規化されていない距離と名目距離関数のローカル値の比率に等しい請求項22に記載の方法。
- 滑らかになった画像を生成するために画像を滑らかにするステップと、
滑らかになった画像の値に基づいて名目距離関数に値を割り当てるステップと
をさらに含む請求項23に記載の方法。 - 最終的な点の格子からメッシュを生成するステップをさらに含み、メッシュが画像に関連付けられた情報を符号化するために使用可能である請求項17に記載の方法。
- メッシュを使用して物理プロセスのシミュレーションを実行するステップをさらに含む請求項25に記載の方法。
- 前記組み合わせがαA+βBの一次結合を含み、Aはアトミック・ポテンシャル・エネルギーであり、Bは画像ポテンシャル・エネルギーであり、係数αおよびβが、画像のフィーチャに関する点の前記格子の位置感度の程度と、点の前記格子の正則性の程度とを制御する請求項17に記載の方法。
- 一連の画像を獲得するステップと、
対応する一連の最終的な格子を生成するために、前記一連の前記画像のそれぞれで初期設定するステップと調整するステップとを実行するステップと
をさらに含む請求項17に記載の方法。 - 後続画像を獲得するステップと、
画像符号を生成するために、点の最終的な格子を使用して後続画像の差分を符号化するステップと、
伝送媒体によって画像符号を伝送するステップと
をさらに含む請求項17に記載の方法。 - コンピュータにおいてシミュレーションに適した点の格子を決定するための方法であって、
前記コンピュータが、
プロセッサと、
前記プロセッサに結合されており、プログラム命令を格納するように構成されているメモリと、そして
前記メモリに画像を提供するための入力ポートと
を含み、
前記プロセッサが、前記メモリから前記プログラム命令を読み取って実行し、前記プログラム命令の前記実行に応答して、画像ポテンシャル・フィールドを生成するために画像を操作するステップであって、前記画像ポテンシャル・フィールドが前記画像の対象のフィーチャに沿った極値的なポテンシャル値を得るステップと、
前記プロセッサが、前記画像に対応する空間の領域で点の格子を初期設定するステップと、そして
前記プロセッサが、合計ポテンシャル・エネルギーを極値化するために前記領域で点の前記格子の位置を反復的に調整するステップと
を含み、
前記合計ポテンシャル・エネルギーが、アトミック・ポテンシャル・エネルギーと画像ポテンシャル・エネルギーの組み合わせを含み、
アトミック・ポテンシャル・エネルギーが、前記格子点の対に対するアトミック・ポテンシャルの和を含み、
画像ポテンシャル・エネルギーが画像ポテンシャルの和を含み、そして
前記画像ポテンシャルのそれぞれが、格子点の1つでの画像ポテンシャル・フィールドの評価値に対応する、
方法。 - 画像ポテンシャル・フィールドを生成するために第1の画像を操作する前記ステップが、前記第1の画像のエッジを検出するステップを含み、前記対象のフィーチャが前記第1の画像のエッジを含む請求項30に記載の方法。
- 画像ポテンシャル・フィールドを生成するために前記画像を操作する前記ステップが、
画像の対象のフィーチャを識別するステップと、
前記対象のフィーチャの少なくとも1つの空間の部分に対応する第1の空間位置で画像ポテンシャル・フィールドに第1の定数値を割り当てるステップと、
前記対象のフィーチャに対応しない第2の空間位置で画像ポテンシャル・フィールドに第2の定数値を割り当てるステップと
を含む請求項30に記載の方法。 - 前記第1の定数値が前記画像ポテンシャル・フィールドの最大値である請求項32に記載の方法。
- 前記第1の定数値が前記画像ポテンシャル・フィールドの最小値である請求項32に記載の方法。
- 画像ポテンシャル・フィールドを生成するために前記画像を操作する前記ステップが、画像ポテンシャル・フィールドの第2のバージョンを得るために、第1の定数値と第2の定数値とを割り当てる前記ステップによって生成された画像ポテンシャル・フィールドの第1のバージョンを滑らかにするステップをさらに含む請求項32に記載の方法。
- 反復的に位置を調整する前記ステップの一組の反復用に画像ポテンシャルを計算するために画像ポテンシャル・フィールドの前記第2のバージョンが使用され、反復的に位置を調整する前記ステップの第2の組の反復用にアトミック画像ポテンシャルを計算するために画像ポテンシャル関数の前記第1のバージョンが使用される請求項35に記載の方法。
- 前記空間で点の前記格子の位置をランダムに置き換えるステップと、
合計ポテンシャル・エネルギーの連続した極値を得るために、前記ランダムに置き換えるステップと、前記反復的に調整するステップの複数の反復を実行するステップと
をさらに含む請求項30に記載の方法。 - 前記初期設定するステップが、前記格子の各点から前記点付近の他の点までの好ましい距離を指定する距離関数を使用し、前記好ましい距離が前記領域の位置の関数である請求項30に記載の方法。
- 空間の領域の点の格子を初期設定する前記ステップが、
キューから第1の仮格子点を読み取るステップと、
前記第1の仮格子点の周囲の第1の近傍が前記格子の点を含んでいるか否かを判定するために、第1の近傍を検査するステップと、
第1の近傍が前記格子の点を含んでいない場合、
第1の仮格子点を格子に加えるステップと、
新しい仮格子点をキューに付け加えるステップであって、前記新しい仮格子点が、第1の仮格子点と距離関数に関して厳密に正則な格子に対応する、割り当てられた座標位置であるステップと
を含む更新操作を実行するステップと
を含む請求項38に記載の方法。 - キューに1つまたは複数のシード点を格納するステップと、
前記読み取るステップと、前記検査するステップと、前記更新操作を条件付きで実行するステップとを、前記空間の部分が充填されるまで反復的に実行するステップと
をさらに含む請求項39に記載の方法。 - 前記第1の仮格子点の周囲の第1の近傍が、第1の仮格子点で評価される距離関数に比例した直径を有するN次元のボールであり、Nは前記画像に対応する前記空間の次元である請求項39の記載の方法。
- 空間の領域で点の格子を初期設定する前記ステップが、
距離関数に基づいて領域の候補位置でローカル確率値を計算するステップと、
乱数値を生成するステップと、
乱数値がローカル確率値に関する不等式条件を満足させるか否かを判定するステップと、
乱数値がローカル確率値に関する不等式条件を満足させる場合に、条件付きで候補位置を点の格子に加えるステップと
を含む請求項30に記載の方法。 - 点の格子を初期設定する前記ステップが、
前記第1の画像によってサンプリングされた画像位置の集合全体で候補位置を移動するステップと、
前記画像位置のそれぞれに関して、前記計算するステップと、前記生成するステップと、前記判定するステップと、前記条件付きで加えるステップとを実行するステップと
をさらに含む請求項42に記載の方法。 - 組み合わせが(1−β)A+βBの形式であり、Aはアトミック・ポテンシャル・エネルギーであり、Bは画像ポテンシャル・エネルギーであり、パラメータβが0から1を含めた範囲の任意の値をとる請求項30に記載の方法。
- 点の格子からメッシュを生成するために点の格子を三角形分割するステップをさらに含み、前記メッシュがメッシュ要素の結合を含んでおり、メッシュ要素の頂点が格子点である請求項30に記載の方法。
- 点の格子を三角形分割する前記ステップが、点の格子のDelaunay三角形分割を実行するステップを含む請求項45に記載の方法。
- 対象の前記フィーチャの1つまたは複数を近似する前記メッシュ要素の境界線の結合を識別するステップをさらに含む請求項45に記載の方法。
- メッシュでシミュレーションを実行するステップをさらに含み、シミュレーションが物理システムの挙動を表現する出力を生成する請求項45に記載の方法。
- 物理システムが、1つまたは複数の流体を含む地下貯留層を含む請求項48に記載の方法。
- シミュレーションに適した点の格子を決定するように構成されたコンピュータ・システムにおいて、
プロセッサと、
前記プロセッサに結合されており、プログラム命令を格納するように構成されているメモリと、
前記メモリに画像を提供するための入力ポートと
を含み、
前記プロセッサが前記メモリからプログラム命令を読み取って実行し、プログラム命令の前記実行に応答して、
画像の対象のフィーチャに沿って1つまたは複数の極値のポテンシャル値を得る画像ポテンシャル・フィールドを生成するよう前記画像を操作し、
前記画像に対応する空間の領域で点の格子を初期設定し、
合計ポテンシャル・エネルギーを極値化するために前記領域で点の前記格子の位置を反復的に調整するようプロセッサが動作可能であり、
前記合計ポテンシャル・エネルギーが、アトミック・ポテンシャル・エネルギーと画像ポテンシャル・エネルギーの組み合わせを含み、
アトミック・ポテンシャル・エネルギーが、前記格子点の対に対するアトミック・ポテンシャルの和を含み、
画像ポテンシャル・エネルギーが画像ポテンシャルの和を含み、
前記画像ポテンシャルのそれぞれが、格子点の1つで画像ポテンシャル・フィールドの評価値に対応する
コンピュータ・システム。 - コンピュータにおいて実行可能なプログラム命令を格納するように構成されたコンピュータ可読メモリ媒体であって、
前記コンピュータが、
プロセッサと、
前記プロセッサに結合されており、プログラム命令を格納するように構成されているメモリと、そして
前記メモリに画像を提供するための入力ポートと
を含み、
前記プロセッサが、前記メモリから前記プログラム命令を読み取って実行し、前記プログラム命令の前記実行に応答して、画像によってサンプリングされた空間の部分で点の格子を初期設定するステップと、
前記プロセッサが、前記点の空間座標の合成関数を極値化するために前記点を移動することによって前記格子を最適化するステップと
を実施するようにプログラム命令が実行可能であり、
前記合成関数が、対になった前記点間の距離の第1の関数と、前記点近くの前記画像のサンプリングされた値の第2の関数との重みのついた組み合わせであり、
前記第1の関数が、前記対になった前記点間の距離の正確に1つに対応する項の和であり、
点の前記最適化された格子が、前記画像に関連付けられたプロセスのシミュレーション用のメッシュを生成するために使用可能である、
コンピュータ可読メモリ媒体。 - プログラム命令が、点の格子から空間充填メッシュを生成するためにさらに実行可能である請求項51に記載のメモリ媒体。
- メッシュがN次元のメッシュ要素を含んでおり、プログラム命令が、前記メッシュ要素の空間の部分の境界線の結合を識別するようにさらに実行可能であり、境界線の前記結合が前記画像の対象の領域間の境界線に対応する請求項52に記載のメモリ媒体。
- 前記初期設定するステップが、前記格子の各点から前記点の近くの他の点までの好ましい距離を指定する距離関数を使用し、前記好ましい距離が前記空間の位置の関数である請求項51に記載のメモリ媒体。
- 点の格子を初期設定する前記ステップが、
キューから第1の仮格子点を読み取るステップと、
前記第1の仮格子点の周囲の第1の近傍が前記格子の点を含むか否かを判定するために第1の近傍を検査するステップと、
第1の近傍が前記格子の点を含んでいない場合、
第1の仮格子点を格子に加えるステップと、
新しい仮格子点をキューに付け加えるステップであって、前記新しい仮格子点は、第1の仮格子点と距離関数に関して厳密に正則な格子に対応する、割り当てられた座標位置であるステップと
を含む更新操作を実行するステップとを含む請求項54に記載のメモリ媒体。 - 点の格子を初期設定する前記ステップが、前記画像によってサンプリングされた位置で点を前記格子にランダムに加えるステップを含み、前記サンプリングされた位置の1つで前記格子に点を加える確率が、前記サンプリングされた位置の前記1つで評価される距離関数によって決定される請求項54に記載のメモリ媒体。
- 前記点の格子を最適化する前記ステップが第1の関数の値を反復的に計算するステップを含み、第1の関数の値を計算する前記ステップが、
ローカル関数値を得るために格子点の近傍の画像サンプル位置で関数形式を求めるステップと、
ローカル関数値を、アトミック・ポテンシャル・フィールドを表現する配列の対応するサンプルに加えるステップと、
格子点のそれぞれに対して、前記求めるステップと前記加えるステップとを反復的に実行するステップと、
アトミック・ポテンシャル・フィールドを表現する配列の1つまたは複数のサンプルに基づいて、格子点のそれぞれに対応するアトミック・ポテンシャル・フィールド値を計算するステップと、
第1の関数の値を決定するために、格子点のそれぞれにアトミック・ポテンシャル・フィールド値を加えるステップと
を含む請求項51に記載のメモリ媒体。 - 関数形式が、格子点の近傍で評価された名目距離関数によって分割された格子点からの距離の関数を含んでいる請求項57に記載のメモリ媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US25434700P | 2000-12-08 | 2000-12-08 | |
| US09/818,220 US6631202B2 (en) | 2000-12-08 | 2001-03-27 | Method for aligning a lattice of points in response to features in a digital image |
| PCT/US2001/048239 WO2002047030A2 (en) | 2000-12-08 | 2001-12-10 | Method for aligning a lattice of points in response to features in a digital image |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004533026A JP2004533026A (ja) | 2004-10-28 |
| JP4102187B2 true JP4102187B2 (ja) | 2008-06-18 |
Family
ID=26943995
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002548679A Expired - Fee Related JP4102187B2 (ja) | 2000-12-08 | 2001-12-10 | デジタル画像のフィーチャに応じて点の格子を整列する方法 |
Country Status (12)
| Country | Link |
|---|---|
| US (2) | US6631202B2 (ja) |
| EP (1) | EP1352366B1 (ja) |
| JP (1) | JP4102187B2 (ja) |
| CN (1) | CN1267863C (ja) |
| AT (1) | ATE374409T1 (ja) |
| AU (2) | AU3257702A (ja) |
| BR (1) | BR0116043A (ja) |
| CA (1) | CA2432948A1 (ja) |
| DE (1) | DE60130680T2 (ja) |
| NO (1) | NO20032580L (ja) |
| RU (1) | RU2282242C2 (ja) |
| WO (1) | WO2002047030A2 (ja) |
Families Citing this family (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7369973B2 (en) * | 2000-06-29 | 2008-05-06 | Object Reservoir, Inc. | Method and system for representing reservoir systems |
| AUPR554301A0 (en) * | 2001-06-07 | 2001-07-12 | Howard Florey Institute Of Experimental Physiology And Medicine | A map of a property |
| US8120618B2 (en) * | 2002-06-11 | 2012-02-21 | Hewlett-Packard Development Company, L.P. | System and method for visualization of objects using energy minimization of customized potential functions |
| US6823297B2 (en) | 2003-03-06 | 2004-11-23 | Chevron U.S.A. Inc. | Multi-scale finite-volume method for use in subsurface flow simulation |
| US7496488B2 (en) * | 2003-03-06 | 2009-02-24 | Schlumberger Technology Company | Multi-scale finite-volume method for use in subsurface flow simulation |
| US7254523B2 (en) * | 2003-03-14 | 2007-08-07 | Seiko Epson Corporation | Selectively reduced bi-cubic interpolation for ink-jet simulations on quadrilateral grids |
| US7117138B2 (en) * | 2003-03-14 | 2006-10-03 | Seiko Epson Corporation | Coupled quadrilateral grid level set scheme for piezoelectric ink-jet simulation |
| US7251591B2 (en) * | 2003-08-29 | 2007-07-31 | Seiko Epson Corporation | Consistent back pressure for piezoelectric ink-jet simulation |
| US7679615B2 (en) * | 2004-05-04 | 2010-03-16 | Iucf-Hyu (Industry-University Cooperation Foundation Hanyang University) | Calculating three-dimensional (3D) Voronoi diagrams |
| CA2569102A1 (en) | 2004-06-07 | 2005-12-22 | Exxonmobil Upstream Research Company | Method for solving implicit reservoir simulation matrix equation |
| US9155373B2 (en) * | 2004-08-02 | 2015-10-13 | Invention Science Fund I, Llc | Medical overlay mirror |
| US20070011646A1 (en) * | 2005-06-24 | 2007-01-11 | College Of William And Mary | Parallel Decoupled Mesh Generation |
| US7610184B1 (en) * | 2006-01-23 | 2009-10-27 | Itt Manufacturing Enterprises, Inc. | Sector meshing and neighbor searching for object interaction simulation |
| US7620532B2 (en) * | 2006-01-23 | 2009-11-17 | Itt Manufacturing Enterprises, Inc. | Object discretization to particles for computer simulation and analysis |
| US7765091B2 (en) * | 2006-06-18 | 2010-07-27 | Chevron U.S.A Inc. | Method, apparatus and system for reservoir simulation using a multi-scale finite volume method including black oil modeling |
| US7930152B2 (en) * | 2006-07-14 | 2011-04-19 | Colorado School Of Mines | Method for signal and image processing with lattice gas processes |
| US7536285B2 (en) * | 2006-08-14 | 2009-05-19 | Seiko Epson Corporation | Odd times refined quadrilateral mesh for level set |
| JP5052985B2 (ja) * | 2007-07-31 | 2012-10-17 | 住友重機械工業株式会社 | 分子シミュレーション方法、分子シミュレーション装置、分子シミュレーションプログラム、及び該プログラムを記録した記録媒体 |
| US20090060332A1 (en) * | 2007-08-27 | 2009-03-05 | Riverain Medical Group, Llc | Object segmentation using dynamic programming |
| US8437996B2 (en) | 2007-12-13 | 2013-05-07 | Exxonmobil Upstream Research Company | Parallel adaptive data partitioning on a reservoir simulation using an unstructured grid |
| RU2010140802A (ru) * | 2008-03-06 | 2012-04-20 | Конинклейке Филипс Электроникс Н.В. (Nl) | Способ анализа сосудистой системы |
| EP2297658A2 (en) * | 2008-05-16 | 2011-03-23 | Chevron U.S.A. Incorporated | Multi-scale method for multi-phase flow in porous media |
| WO2010003004A2 (en) * | 2008-07-03 | 2010-01-07 | Chevron U.S.A. Inc. | Multi-scale finite volume method for reservoir simulation |
| EP2350915A4 (en) * | 2008-09-30 | 2013-06-05 | Exxonmobil Upstream Res Co | METHOD FOR SOLVING STORAGE SIMULATION MATRIX COMPENSATION USING PARALLEL INCOMPLETE MULTILEVEL FACTORIZATION |
| WO2010039326A1 (en) * | 2008-09-30 | 2010-04-08 | Exxonmobil Upstream Research Company | Self-adapting iterative solver |
| US9138649B2 (en) * | 2008-10-08 | 2015-09-22 | Sony Corporation | Game control program, game device, and game control method adapted to control game where objects are moved in game field |
| CA2759199A1 (en) * | 2008-10-09 | 2010-04-15 | Chevron U.S.A. Inc. | Iterative multi-scale method for flow in porous media |
| PL2415018T3 (pl) * | 2009-04-03 | 2018-03-30 | Koninklijke Philips N.V. | UKŁAD I SPOSÓB INTERAKTYWNEJ SEGMENTACJl SIATKI W CZASIE RZECZYWISTYM |
| BR112012005449A2 (pt) * | 2009-09-10 | 2016-04-12 | Chevron Usa Inc | método implementado por computador, e, sistema de computador |
| US9696842B2 (en) * | 2009-10-06 | 2017-07-04 | Cherif Algreatly | Three-dimensional cube touchscreen with database |
| EP2491531B1 (en) * | 2009-10-22 | 2015-03-04 | Koninklijke Philips N.V. | Alignment of an ordered stack of images from a specimen. |
| EP2494385A2 (en) * | 2009-10-28 | 2012-09-05 | Chevron U.S.A. Inc. | Multiscale finite volume method for reservoir simulation |
| EP2496967B1 (en) | 2009-11-05 | 2021-11-17 | ExxonMobil Upstream Research Company | Method for creating a hierarchically layered earth model |
| US8428922B2 (en) * | 2010-02-05 | 2013-04-23 | Seiko Epson Corporation | Finite difference level set projection method on multi-staged quadrilateral grids |
| US8274859B2 (en) * | 2010-02-22 | 2012-09-25 | Landmark Graphics Corporation | Systems and methods for modeling 3D geological structures |
| JP5470607B2 (ja) * | 2010-09-29 | 2014-04-16 | 株式会社日立製作所 | 計算機システム、及び画像/図表を位置合わせする方法 |
| US9128204B2 (en) | 2011-04-15 | 2015-09-08 | Exxonmobil Upstream Research Company | Shape-based metrics in reservoir characterization |
| WO2012178082A1 (en) * | 2011-06-24 | 2012-12-27 | The Trustees Of Columbia University In The City Of New York | Improved methods, devices and systems to process x-ray diffraction data |
| CN102708344B (zh) * | 2012-01-13 | 2013-12-25 | 蒋月琴 | 点阵编码识别方法 |
| US9299191B2 (en) * | 2012-06-04 | 2016-03-29 | Google Inc. | Adaptive artifact removal |
| RU2601232C2 (ru) * | 2012-08-20 | 2016-10-27 | Лэндмарк Графикс Корпорейшн | Способы и системы для включения мест выделенных точек псевдоповерхности в модели скорости сейсмических волн |
| WO2015048760A1 (en) * | 2013-09-30 | 2015-04-02 | Bp Corporation North America Inc. | Interface point method modeling of the steam-assisted gravity drainage production of oil |
| US10838376B2 (en) * | 2015-09-10 | 2020-11-17 | I.Systems Automação Industrial S.A | Method of generating fuzzy knowledge base for a programmable fuzzy controller |
| US9875578B2 (en) * | 2015-10-13 | 2018-01-23 | Biosense Webster (Israel) Ltd. | Voxelization of a mesh |
| US10304243B1 (en) * | 2017-06-27 | 2019-05-28 | National Technology & Engineering Solutions Of Sandia, Llc | Generating an implicit voronoi mesh to decompose a domain of arbitrarily many dimensions |
| US11636668B2 (en) | 2017-11-10 | 2023-04-25 | Nvidia Corp. | Bilateral convolution layer network for processing point clouds |
| US10776923B2 (en) * | 2018-06-21 | 2020-09-15 | International Business Machines Corporation | Segmenting irregular shapes in images using deep region growing |
| US10643092B2 (en) | 2018-06-21 | 2020-05-05 | International Business Machines Corporation | Segmenting irregular shapes in images using deep region growing with an image pyramid |
| CN110648276B (zh) * | 2019-09-25 | 2023-03-31 | 重庆大学 | 基于流形映射与字典学习的高维图像数据降维方法 |
| CA3208947A1 (en) * | 2021-01-22 | 2022-07-28 | Jr. Thomas J. Nugent | Power receiver electronics |
| CN114414339B (zh) * | 2022-01-24 | 2023-08-25 | 上海市农业科学院 | 一种基于非靶向代谢组学检测宫内生长受限羔羊血浆代谢物的方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4908781A (en) | 1985-11-12 | 1990-03-13 | The Trustees Of Columbia University In The City Of New York | Computing device for calculating energy and pairwise central forces of particle interactions |
| US5596511A (en) | 1993-01-27 | 1997-01-21 | Fuji Xerox Co., Ltd. | Computing method and apparatus for a many-body problem |
| US5859645A (en) | 1993-03-26 | 1999-01-12 | Loral Corporation | Method for point sampling in computer graphics systems |
| US5898793A (en) * | 1993-04-13 | 1999-04-27 | Karron; Daniel | System and method for surface rendering of internal structures within the interior of a solid object |
| KR100209885B1 (ko) | 1995-08-30 | 1999-07-15 | 윤종용 | 적응적 제어점제거에 근거한 영상의 불규칙 삼각형메쉬 표현을 위한 방법 |
| US5886702A (en) * | 1996-10-16 | 1999-03-23 | Real-Time Geometry Corporation | System and method for computer modeling of 3D objects or surfaces by mesh constructions having optimal quality characteristics and dynamic resolution capabilities |
| FR2763721B1 (fr) * | 1997-05-21 | 1999-08-06 | Inst Nat Rech Inf Automat | Dispositif electronique de traitement d'images pour la detection de variations dimensionnelles |
| US6226542B1 (en) | 1998-07-24 | 2001-05-01 | Biosense, Inc. | Three-dimensional reconstruction of intrabody organs |
| US6124857A (en) | 1998-08-12 | 2000-09-26 | International Business Machines Corporation | Meshing method and apparatus |
-
2001
- 2001-03-27 US US09/818,220 patent/US6631202B2/en not_active Expired - Lifetime
- 2001-12-10 DE DE60130680T patent/DE60130680T2/de not_active Expired - Fee Related
- 2001-12-10 EP EP01992103A patent/EP1352366B1/en not_active Expired - Lifetime
- 2001-12-10 AT AT01992103T patent/ATE374409T1/de not_active IP Right Cessation
- 2001-12-10 BR BR0116043-5A patent/BR0116043A/pt not_active IP Right Cessation
- 2001-12-10 WO PCT/US2001/048239 patent/WO2002047030A2/en active IP Right Grant
- 2001-12-10 AU AU3257702A patent/AU3257702A/xx active Pending
- 2001-12-10 CA CA002432948A patent/CA2432948A1/en not_active Abandoned
- 2001-12-10 CN CN01822247.1A patent/CN1267863C/zh not_active Expired - Fee Related
- 2001-12-10 AU AU2002232577A patent/AU2002232577B2/en not_active Ceased
- 2001-12-10 RU RU2003120439/09A patent/RU2282242C2/ru active
- 2001-12-10 JP JP2002548679A patent/JP4102187B2/ja not_active Expired - Fee Related
-
2003
- 2003-06-06 NO NO20032580A patent/NO20032580L/no not_active Application Discontinuation
- 2003-07-15 US US10/619,774 patent/US7050612B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| NO20032580L (no) | 2003-08-07 |
| ATE374409T1 (de) | 2007-10-15 |
| DE60130680T2 (de) | 2008-02-07 |
| US6631202B2 (en) | 2003-10-07 |
| US20020181751A1 (en) | 2002-12-05 |
| CN1267863C (zh) | 2006-08-02 |
| US20040006450A1 (en) | 2004-01-08 |
| US7050612B2 (en) | 2006-05-23 |
| RU2282242C2 (ru) | 2006-08-20 |
| BR0116043A (pt) | 2004-08-17 |
| CN1488125A (zh) | 2004-04-07 |
| AU3257702A (en) | 2002-06-18 |
| AU2002232577B2 (en) | 2005-01-20 |
| EP1352366A2 (en) | 2003-10-15 |
| CA2432948A1 (en) | 2002-06-13 |
| RU2003120439A (ru) | 2005-02-10 |
| NO20032580D0 (no) | 2003-06-06 |
| WO2002047030A2 (en) | 2002-06-13 |
| EP1352366B1 (en) | 2007-09-26 |
| DE60130680D1 (de) | 2007-11-08 |
| JP2004533026A (ja) | 2004-10-28 |
| WO2002047030A3 (en) | 2002-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4102187B2 (ja) | デジタル画像のフィーチャに応じて点の格子を整列する方法 | |
| AU2002232577A1 (en) | Method for aligning a lattice of points in response to features in a digital image | |
| US10330807B2 (en) | Device and method for displaying full azimuth angle domain image data | |
| Lim et al. | Surface reconstruction techniques: a review | |
| IL268301A (en) | A method and system for aligning three-dimensional data | |
| CN104268934B (zh) | 一种由点云直接重建三维曲面的方法 | |
| Paulsen et al. | Markov random field surface reconstruction | |
| US20110115787A1 (en) | Visulation of geologic features using data representations thereof | |
| US20200082618A1 (en) | Isosurface generation method and visualization system | |
| AU2013200609A1 (en) | Visulation of geologic features using data representations thereof | |
| Zhao et al. | Visualization, analysis and shape reconstruction of sparse data | |
| Morel et al. | Terrain model reconstruction from terrestrial LiDAR data using radial basis functions | |
| Olsen et al. | Hinged, pseudo-grid triangulation method for long, near-linear cliff analyses | |
| Hay et al. | Modeling multi-scale landscape structure within a hierarchical scale-space framework | |
| Musicco et al. | Enhancing 3D Modeling Efficiency via Semi-Automatic Point Cloud Segmentation and Multi-Lod Mesh Reconstruction | |
| Osher et al. | Visualization, Analysis and Shape Reconstruction of Sparse Data | |
| Kadlec | Interactive GPU-based visulation and structure analysis of three-dimensional implicit surfaces for seismic interpretation | |
| Liao | Low Resolution ab initio Phasing Method by Modification of Density and Phase in Real and Reciprocal Space | |
| Dale et al. | Scanning and Reconstruction for Dynamic Surfaces | |
| Bajaj | Modeling and Visualization for Dynamic Molecular Structures | |
| Petrík | Extrakce iso-ploch z časově proměnných dat | |
| Feng | Methods for Tensor Field Visualization |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080321 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110328 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |