JP3892824B2 - モータの位置制御装置 - Google Patents
モータの位置制御装置 Download PDFInfo
- Publication number
- JP3892824B2 JP3892824B2 JP2003081055A JP2003081055A JP3892824B2 JP 3892824 B2 JP3892824 B2 JP 3892824B2 JP 2003081055 A JP2003081055 A JP 2003081055A JP 2003081055 A JP2003081055 A JP 2003081055A JP 3892824 B2 JP3892824 B2 JP 3892824B2
- Authority
- JP
- Japan
- Prior art keywords
- speed
- command
- output
- control
- proportional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Feedback Control In General (AREA)
- Control Of Position Or Direction (AREA)
Description
【発明の属する技術分野】
本発明は、モータの位置制御装置に関するものであり、特に工作機械や半導体製造装置などに使用される高速位置決め用モータの位置を制御するのに適したモータの位置制御装置に関するものである。
【0002】
【従来の技術】
従来のモータの位置制御装置としては、図15に示すような制御装置がある[特開平10−254550号公報(特許文献1)の図1参照]。この装置では位置指令と位置フィードバックの偏差が位置制御部に含まれる減算器で算出され、この偏差が位置制御部で処理されて速度指令として出力される。そしてエンコーダEから出力された位置フィードバックを速度算出部2で変換して得た速度フィードバックと速度指令との偏差を、速度制御部3に含まれる減算器で算出する。この偏差は、速度制御部3内で処理され、速度制御部3はトルク制御部4にトルク指令を出力する。トルク制御部4は、トルク指令通りのトルクがモータMから出力されるようにモータMに流れる電流を制御する。
【0003】
通常、この装置における位置制御部1は比例制御(P制御)部として構成されており、速度制御部3は比例積分制御(PI制御)部で構成されている。従来の速度制御部3を構成するPI制御部は、図16に示す構成を有している。このPI制御部では、速度指令と速度フィードバックとの偏差を減算器SBで算出し、その偏差をゲイン1の比例制御系を通して加算器ADに入力する。積分制御系では、乗算器31で偏差に積分ゲインを乗算した後、この偏差を速度積分器32で積分して加算器ADに入力する。加算器ADは、比例制御系の出力と積分制御系の出力とを加算して、乗算器33へと出力し、乗算器33は加算器ADの出力に比例ゲインを乗算してトルク指令として出力する。このように、速度制御部3をPI制御部で構成することにより、速度の過渡偏差のみならず、定常偏差も抑制できる。
【0004】
また特開平3−15911号公報(特許文献2)には、位置指令を微分して位置のフィードフォーワード量を求め、位置ループ制御で得られた制御量に上記フィードフォーワード制御量を加算して速度指令とし、位置のフィードフォーワード制御量を微分して得られる速度のフィードフォーワード制御量を速度ループ制御によって得られる値に加算して電流指令とすることにより、応答性を高めて安定したサーボ系を得るサーボモータの制御方法が開示されている。
【0005】
【特許文献1】
特開平10−254550号公報(図1)
【0006】
【特許文献2】
特開平3−15911号公報(図1)
【0007】
【発明が解決しようとする課題】
従来の制御装置では、フィードフォーワード・ゲインを上げることにより追従性は改善されるが、フィードフォーワード・ゲインを100%まで上げるとオーバーシュートが大きくなるという問題があった。オーバーシュートは加工品質を劣化させるので、できるだけ抑制する必要がある。図7は従来の制御装置において、フィードフォーワード・ゲインを0%とした時の位置制御動作をシミュレーションしたものである。このように、フィードフォーワード・ゲインが小さいと、オーバーシュートは小さいが、図9のようにフィードフォーワード・ゲインを100%にすると、オーバーシュートが大きくなる。このため、従来は図8のように、50%程度のフィードフォーワード・ゲインにし、オーバーシュートが大きくならない範囲で、追従性を改善していた。
【0008】
制御理論的には、フィードフォーワード制御では、御御対象の特性がわかっているときに、制御量が目標値に一致するよう操作量を逆算するのが良い。従来の制御系おいて、位置制御を行う場合の制御対象を速度制御系と見ると、操作量は速度指令であり、制御量は位置である。速度制御系を最も簡単なモデルで近似すると、一次遅れ系で表すことができ、制御対象の逆関数をとると一次進みとなる。従来はこれを一定の保証で行っていたため、高次の遅れ分に対する補償ができずオーバーシュートを生じていた。
【0009】
また、もう一つの要因として、位置制御器から出力される速度指令の問題がある。一般的に、制御系の応答は有限であり、速度フィードフォーワード指令を出力しても速度フィードバックが応答するには時間がかかる。速度フィードフォーワード指令が出力されてモータは駆動を開始するが、速度フィードフォーワード指令が出力されてから速度フィードバックが応答するまでの間に生ずる位置偏差により、位置制御器から速度指令を出力してしまう。そして、モータが一定速で回転している間はこの位置偏差は減少するが、モータ減速時にまた位置偏差を生じ速度指令が出力される。
【0010】
このように、位置偏差により生じた速度指令が速度フィードフォーワード指令に加算されるため、本来必要とする速度指令以上の速度指令が与えられ、オーバーシュートを生じていた。
【0011】
更に別の要因として速度制御器の問題がある。速度制御器は、通常、PI制御で構成されており、図16に示すような構成になっている。図7乃至図9は従来の速度制御器を用いた場合のシミュレーション結果である。制御系の応答が有限であるため、速度指令が与えられても、速度フィードバックが応答するまでには時間がかかり、この間に速度積分器は積算を行っている。この積分器の充放電により速度制御器の時間応答が低下しており、これによってもオーバーシュートが生じていた。以上のように、従来の制御装置では、フィードフォーワード系の関数を比例系で構成していたこと、また、速度系の応答遅れを考慮せずに位置制御系が組まれていたこと、速度制御器が速度制御系の応答を考慮せずに組まれていたことにより、オーバーシュートを生じてしまい、フィードフォーワード・ゲインを100%まで上昇させることができなかった。このため、追従性の向上には限度があるという問題があった。
【0012】
本発明の目的は、従来の問題を改善しフィードフォーワード・ゲインを100%まで上昇させることを可能にし、追従性を高めたモータ位置制御装置を提供することにある。
【0013】
【課題を解決するための手段】
本発明は、制御対象であるモータの位置を検出する位置検出部と、モータの速度を算出する速度算出部と、位置検出部からフィードバックされたモータの位置と位置指令とが一致するように速度指令を出力して位置制御をする位置制御部と、比例積分制御により、速度算出部からフィードバックされた速度と速度指令とが一致するようにトルク指令を出力して速度制御を行う速度制御部と、トルク指令に基づいてトルク制御を行うトルク制御部とを備えたモータの位置制御装置を改良の対象とする。
【0014】
本発明の位置制御部は、位置指令と位置検出部により検出した位置との位置偏差を求める減算手段と、位置偏差に位置比例ゲインを乗算する位置ループ乗算手段と、位置指令を微分する微分器と、微分器の出力にフィードフォーワード・ゲインを乗算するフィードフォーワード・ゲイン乗算手段と、フィードフォーワード・ゲイン乗算手段の出力を比例微分制御して速度制御系の遅れを補償する比例微分手段と、位置指令の量子化誤差によるリップルを除去する伝達関数を有して、比例微分手段の出力と前記フィードフォーワード・ゲイン乗算手段の出力との加算値をフィルタ処理するフィードフォーワード・ローパスフィルタと、フィードフォーワード・ローパスフィルタの出力と位置ループ乗算手段の出力とを加算して速度指令を出力する加算手段とを備えている。
【0015】
本発明のように位置制御部でフィードフォーワード乗算出力を比例微分制御すると、一次進みの特性を得ることができて、速度制御系の遅れを補償し、位置指令に対する追従性を改善できる。また、速度制御側遅れ補償ローパスフィルタを用いると、速度制御系の遅れに相当する遅れを持った速度指令と実際に遅れている速度フィードバックの速度との偏差をゼロに近いものとすることができて、速度積分器の溜まり量をほぼゼロにできる。またフィードフォーワード・ゲインを100%に上昇させた場合でもオーバーシュートの小さい制御系を構成することができ、より追従性を高めた位置制御が実現できる。またフィードフォーワード・ローパスフィルタを用いれば、位置指令部が原因となって発生する量子化誤差に基づくリップルが速度指令それ自体に含まれるのを阻止することができる。
【0016】
また速度制御系の遅れに相当する伝達関数を有する位置制御側遅れ補償ローパスフィルタを更に設け、この位置制御側遅れ補償ローパスフィルタを通った位置指令と位置フィードバックの位置との位置偏差を位置ループ乗算手段に入力するようにしてもよい。また位置指令を微分する微分器の出力と位置の微分値の偏差を積分器で積分して位置偏差を求める場合には、速度制御系の遅れに相当する伝達関数を有する位置制御側遅れ補償ローパスフィルタを微分器と積分器との間に配置し、位置制御側遅れ補償ローパスフィルタを通った微分器の出力と位置の微分値との偏差を積分器に入力するようにしてもよい。
【0017】
このような位置制御側遅れ補償ローパスフィルタを設けることにより、加速時において位置制御部に入力される位置指令と位置フィードバックとがほぼ同時期に立ち上がるようにする。その結果、位置制御部からの速度指令はかなり小さい値になる。このような構成を採用すると、速度フィードフォーワード・ゲインを1または1に近い値にすることができ、位置指令に対する追従性を改善することができる。
【0018】
また本発明においては、速度制御部を、速度制御系の遅れに相当する伝達関数を有する速度制御側遅れ補償ローパスフィルタと、速度指令を速度制御側遅れ補償ローパスフィルタに入力して得た遅延速度指令と速度との速度偏差を積分する速度積分器を含んで構成された積分制御系と、速度指令と速度との差に比例した指令を出力する比例制御系と、積分制御系の出力と比例制御系の出力とを加算する加算手段と、この加算手段の出力に速度比例ゲインを乗じてトルク指令として出力する乗算手段とから構成する。なお比例制御系において速度比例ゲインを速度偏差に乗算し、積分制御系において制御中の演算値に速度比例ゲインを乗じて出力するようにしてもよい。本発明のように速度制御側遅れ補償ローパスフィルタを用いれば、速度制御系の遅れに相当する遅れを持った速度指令と実際に遅れている速度フィードバックの速度との偏差はゼロに近いものとなる。そのため速度積分器の溜まり量をほぼゼロにして、位置指令に対する追従性を改善できる。
【0019】
位置検出部(例えばエンコーダ)の精度が悪い場合には、量子化誤差や位置誤差が原因になったリップルが速度フィードバックに含まれることがある。そこでこのような場合に対処するためには、位置検出部の量子化誤差及び/または位置誤差が原因となって発生するリップルが、トルク指令に現れるのを阻止する伝達関数を有する速度フィードバック・ローパスフィルタを設けるのが好ましい。この場合には、速度を速度フィードバック・ローパスフィルタに入力して得たフィルタ処理後の速度と速度指令との偏差を求める減算手段を含んで比例制御系を構成する。なお位置検出部として、精度及び分解能の高いものを用いれば、位置誤差も小さくなるため、このような構成を採用する必要はない。
【0020】
位置制御部は、位置指令と位置検出部により検出した位置との位置偏差を求める減算手段と、この位置偏差に位置比例ゲインを乗算する位置ループ乗算手段とから構成するのが好ましい。この場合において、位置制御部は、位置指令を微分する微分器と、微分器の出力にフィードフォーワード・ゲインを乗算する乗算手段と、位置指令の量子化誤差によるリップルを除去する伝達関数を有するフィードフォーワード・ローパスフィルタとを更に備えているのが好ましい。また、位置制御部は、位置指令を微分する微分器とこの微分器の出力にフィードフォーワード・ゲインを乗算した出力を、更に比例微分制御して速度制御系の遅れを補償する微分手段の出力と、前記フィードフォーワード・ゲインの乗算手段の出力とを加算した出力をフィードフォーワード・ローパスフィルタによりフィルタ処理するように構成してもよい。
【0021】
【発明の実施の形態】
図1は、本発明のモータの位置制御装置の実施の形態の構成を示すブロック図である。このシステムは、制御対象であるモータMの位置を検出する位置検出部としてエンコーダEを備えている。エンコーダEの出力が、モータの出力軸の位置を示す位置フィードバックである。速度算出部2は、エンコーダEの出力に基づいてモータの速度を算出するように構成されており、速度算出部2の出力が速度フィードバックとなっている。速度フィードバックが、モータMの出力軸の回転速度を示している。位置制御部11Aは、位置検出部としてのエンコーダEからフィードバックされたモータMの位置と位置指令とが一致するように速度指令を出力して位置制御を行うように構成されている。この実施の形態では、位置制御部11Aが、位置指令を微分する微分器112と、微分器112の出力にフィードフォーワード・ゲインVFFを乗算するフィードフォーワード・ゲイン乗算手段113と、この乗算手段113からの出力を更に微分する微分器117と、微分器117からの出力に微分ゲイン(Ks)を乗算する乗算器118と、乗算器118の出力とフィードフォーワード・ゲイン乗算手段113の出力と加算する加算手段AD3と、位置指令の量子化誤差によるリップルを除去する伝達関数(1/(1+STFF))を有するフィードフォーワード・ローパスフィルタ114とを備えている。この例では、微分器117と乗算器118とにより、速度制御系の遅れを補償する比例微分手段が構成されている。なお通常、フィードフォーワード・ゲインVFFは40〜60%(0.4〜0.6)程度に設定される。そして位置指令と位置フィードバックの偏差は、減算手段SB3で求められ、この偏差を位置ループ乗算手段111で位置比例ゲインKP倍する。
【0022】
位置制御部11Aからは、位置ループ乗算手段111から出力された指令とフィードフォーワード・ローパスフィルタ114から出力された速度フィードフォーワード指令(速度FF指令)とが加算手段AD2で加算された指令が速度指令として出力される。このようなフィードフォーワード乗算出力を比例微分制御することにより、一次進みの特性が得られ速度制御系の遅れを補償し、位置指令に対する追従性を改善できる。更にフィードフォーワード・ローパスフィルタ114により、位置指令に含まれる量子化誤差に基づくリップルが速度指令それ自体に含まれるのを阻止することができる。
【0023】
速度指令は、速度制御部13を通ってトルク指令となる。トルク制御部4は、トルク指令通りのトルクが出力されるよう電流を制御する。本実施の形態の装置では、フィードフォーワードを追加することにより、位置決め整定時間を従来よりも短縮させることができる。
【0024】
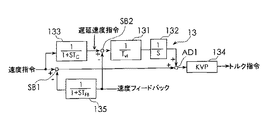
図2は、本発明で用いる図1の速度制御部13の具体的な構成の一例を示すブロック図である。速度制御部13は、比例積分制御により、図1の速度算出部2からフィードバックされた速度と速度指令とが一致するようにトルク指令を出力して速度制御を行う。図2に示すように、本実施の形態で用いる速度制御部13は、速度制御系の遅れに相当する伝達関数(1/(1+STc))を有する速度制御側遅れ補償ローパスフィルタ133を備えている。また速度制御部13は、速度指令を速度制御側遅れ補償ローパスフィルタ133に入力して得た遅延速度指令と速度との速度偏差を減算手段SB2で求め、この速度偏差に積分ゲイン(1/Tvi)を乗算する乗算手段131と、乗算手段131の出力を積分する速度積分器132を含んで構成された積分制御系と、速度指令に比例した指令を出力する比例制御系とを含んでいる。そして速度制御部13は、積分制御系の出力と比例制御系の出力とを加算手段AD1で加算したものに速度比例ゲインKVPを乗じてトルク指令として出力する乗算手段134を更に備えている。以上の構成が基本構成であるが、この例では、エンコーダ(位置検出部)の量子化誤差及び/または位置誤差が原因となって発生するリップルが、トルク指令に現れるのを阻止する伝達関数(1/(1+STFB))を有する速度フィードバック・ローパスフィルタ135を更に備えている。またこの場合、比例制御系は、速度を速度フィードバック・ローパスフィルタ135に入力して得たフィルタ処理後の速度と速度指令との偏差を求める減算手段SB1を含んでいる。
【0025】
この例では、速度指令を速度制御側遅れ補償ローパスフィルタ133に通したものと速度フィードバックの差を減算手段SB2でとり、速度積分ゲイン(1/Tvi)を乗算して速度積分器132に通す。また速度指令と、速度フィードバックを速度フィードバック・ローパスフィルタ135に通したものとの差を減算手段SB1でとり、速度積分器132の出力と加算手段AD1により加算する。そして最後に、速度比例ゲイン(KVP)を乗算してトルク指令を出力する。
【0026】
前述の速度フィードバック・ローパスフィルタ135は、エンコーダEの量子化誤差や位置誤差によるリップルを抑制するフィルタである。このフィルタは、比例制御系のフィードバックにのみ挿入し、リップル分がトルク指令に現れないようにする機能を果す。積分制御系では、速度積分器132が平滑作用を行うため、このようなフィルタは不要である。
【0027】
速度制御側遅れ補償ローパスフィルタ133は、速度制御系の遅れに相当する時間を設定し、遅れ補償出力と速度フィードバックとがほぼ同等の立ち上がりになるようにし、速度指令変化時の速度積分器132の溜り量を低減する。このように速度制御部13を構成することにより、速度フィードバックに含まれるリップルの抑制と、速度指令変化時の速度積分器132の溜り量の低減を同時に達成することができる。
【0028】
なお、エンコーダEの量子化誤差が小さい場合は、速度フィードバック・ローパスフィルタ135は不要である。また、速度制御側遅れ補償ローパスフィルタ133は、速度制御系の遅れを模擬する伝達関数であれば、どのようなものでもよく、本実施の形態の伝達関数に限定されるものではない。
【0029】
図3は、速度制御部13´の変形例を示すブロック図である。図2の速度制御部13と速度制御部13´とを対比すると、図3の速度制御部13´では速度比例ゲインKVPの乗算手段134´が比例制御系の内部にある点(加算手段AD1の前に挿入されている点)と、積分制御系において速度比例ゲインKVPを演算値に乗算するために、乗算手段131´の伝達関数を変更している点で前者の速度制御部13とは構成が相違する。このようにしても図2の速度制御部13と同様の作用効果を得ることができる。
【0030】
図4は、図1の実施の形態の変形例を示すブロック図である。図4の実施の形態は、位置制御部11Bの構成が図1の実施の形態とは異なっており、図4においては、図1の実施の形態の構成要素と同様の要素には図1に付した符号と同様の部分に、図1に付した符号と同じ符号を付して説明を省略する。図1の実施の形態と図4の実施の形態とを対比すると、微分器112の位置が異なる点と、積分器116と微分器5とが新たに追加された点で両者は相違する。すなわちこの位置制御部11Bでは、位置指令を微分する微分器112が減算手段SB3の前に入り、位置検出器で検出した位置を微分する微分器5が減算手段SB3の前にに入り、微分器112の出力(位置指令を微分したもの)と微分器5の出力(位置を微分したもの)との偏差(位置微分偏差)を積分する積分器116が、位置比例ゲインを乗算する位置ループ乗算手段111の前段に入っている。この実施の形態によっても、図1の実施の形態と同様の効果が得られる。
【0031】
図5は、本発明のモータの位置制御装置の更に他の実施の形態の構成を示すブロック図である。図1に示した実施の形態の構成要素と同様の構成要素には、図1に付した符号と同じ符号を付して説明を省略する。この実施の形態では、図1の実施の形態の構成要件に加えて、速度制御系の遅れに相当する伝達関数(1/(1+STd))を有する位置制御側遅れ補償ローパスフィルタ115を位置制御部11Cが更に備えている。この実施の形態では、位置制御側遅れ補償ローパスフィルタ115を通った位置指令と位置フィードバックとの位置偏差が減算手段SB3により求められ、位置偏差が位置ループ乗算手段111に入力されている。この例では、フィードフォーワード・ゲインVFFが1または1に近い値に設定されている。
【0032】
位置制御側遅れ補償ローパスフィルタ115には、速度制御系の遅れを伝達関数として設定してある。位置制御側遅れ補償ローパスフィルタ115の出力と位置フィードバックとが同程度に立ち上がるように位置制御側遅れ補償ローパスフィルタ115の伝達関数が定められている。位置制御側遅れ補償ローパスフィルタ115を追加すると、位置制御部11Cの位置ループ乗算手段111の出力はかなり小さな値になる。この装置では、位置制御側遅れ補償ローパスフィルタ115の追加により、フィードフォーワード・ゲインVFFを100%または100%に近い値まで(1または1に近い値まで)上げることができ、図1の実施の形態の場合と同程度、もしくは、それよりは若干短く、位置決め整定時間を短縮できる。
【0033】
図6は、図4の実施の形態において、位置制御側遅れ補償ローパスフィルタ115を追加した場合の構成を示すものである。その他の点は、図4の実施の形態と同様であるので説明は省略する。
【0034】
図10には、図1及び図2の実施の形態において、速度制御側遅れ補償ローパスフィルタ133を挿入し且つフィードフォーワード・ゲインを0にしたときの位置制御動作をシミュレーションした結果を示す。図7の従来例と比較すると、速度積分器の溜まり量が0に近くなっていることが分かる。また図11には、図10の条件において微分ゲインは0とし、フィードフォーワード・ゲインを100%としたときの位置制御動作をシミュレーションした結果を示す。このようにすると位置のオーバーシュート量が大きくなることが分かる。そして図12には、図11の条件において微分ゲインを入れたときの位置制御動作をシミュレーションした結果を示す。図11と比較すると、図12からは、フィードフォーワード・ゲインを100%にした場合でもオーバーシュート量が減ることが分かる。図13には、図11の条件において、図5の構成のように、位置制御側遅れ補償ローパスフィルタ115を挿入したときの位置制御動作をシミュレーションした結果を示す。図13の場合においても、図11と比較すると、オーバーシュート量が減少しているのが分かる。さらに図14には、図13の条件で微分ゲインを入れたときの位置制御動作をシミュレーションした結果を示す。図14では、加減速時の位置制御器からの速度指令がほぼ0になっており、フィードフォーワード・ゲインを100%にしても、オーバーシュートが小さく、追従性が大きく改善されていることが分かる。最終的に、一定速時の位置偏差は、図8に示す従来例のフィードフォーワード・ゲインを50%にしたときの約1/2程度まで減少しており、従来と比較すると追従性が約2倍に向上することが分かる。
【0035】
【発明の効果】
本発明によれば、位置制御部でフィードフォーワード乗算出力を比例微分制御することにより、一次進みの特性を得て、速度制御系の遅れを補償し、位置指令に対する追従性を改善できる利点がある。また、速度制御側遅れ補償ローパスフィルタを用いていると、速度制御系の遅れに相当する遅れを持った速度指令と実際に遅れている速度フィードバックの速度との偏差をゼロに近いものとすることができ、速度積分器の溜まり量をほぼゼロにできる。またフィードフォーワード・ゲインを100%に上昇させた場合でもオーバーシュートの小さい制御系を構成でき、より追従性を高めた位置制御が実現でき、より高速な追従性が実現できる利点がある。
【図面の簡単な説明】
【図1】本発明のモータの位置制御装置の実施の形態の構成を示すブロック図である。
【図2】本発明で用いる速度制御部の具体的な構成の一例を示すブロック図である。
【図3】本発明で用いる他の速度制御部の具体的な構成の一例を示すブロック図である。
【図4】本発明のモータの位置制御装置の他の実施の形態の構成を示すブロック図である。
【図5】本発明のモータの位置制御装置の更に他の実施の形態の構成を示すブロック図である。
【図6】本発明のモータの位置制御装置の更に他の実施の形態の構成を示すブロック図である。
【図7】従来の位置制御装置におけるフィードフォーワード・ゲインを0%としたときの位置制御動作をシミュレーションした結果を示す図である。
【図8】従来の位置制御装置におけるフィードフォーワード・ゲインを50%としたときの位置制御動作のシミュレーションした結果を示す図である。
【図9】従来の位置制御装置におけるフィードフォーワード・ゲインを100%としたときの位置制御動作をシミュレーションした結果を示す図である。
【図10】図1及び図2の実施の形態において、速度制御側遅れ補償ローパスフィルタを挿入し且つフィードフォーワード・ゲインを0にしたときの位置制御動作をシミュレーションした結果を示す図である。
【図11】図10の条件において微分ゲインは0とし、フィードフォーワード・ゲインを100%としたときの位置制御動作をシミュレーションした結果を示す図である。
【図12】図11の条件において微分ゲインを入れたときの位置制御動作のシミュレーションした結果を示す図である。
【図13】図11の条件において、図5の構成のように、位置制御側遅れ補償ローパスフィルタを挿入したときの位置制御動作をシミュレーションした結果を示す図である。
【図14】図13の条件において微分ゲインを入れたときの位置制御動作をシミュレーションした結果を示す図である。
【図15】従来のモータの位置制御装置の構成を示す図である。
【図16】従来の速度制御部の構成を示すブロック図である。
【符号の説明】
13,13´ 速度制御部
2 速度算出部
4 トルク制御部
11A,11B,11C,11D 位置制御部
SB1,SB2,SB3 減算手段
KP 位置比例ゲイン
KS 微分ゲイン
KVP 速度比例ゲイン
VFF フィードフォーワード・ゲイン
111 位置ループ乗算手段
5,112,117 微分器
113,131,134,131´,134´ 乗算手段
114 フィードフォーワード・ローパスフィルタ
115 位置制御側遅れ補償ローパスフィルタ
110,116 積分器
132 速度積分器
133 速度制御側遅れ補償ローパスフィルタ
135 速度フィードバック・ローパスフィルタ
AD1,AD2,AD3 加算手段
Claims (6)
- 制御対象であるモータの位置を検出する位置検出部と、
前記モータの速度を算出する速度算出部と、
前記位置検出部からフィードバックされた前記モータの位置と位置指令とが一致するように速度指令を出力して位置制御をする位置制御部と、
比例積分制御により、前記速度算出部からフィードバックされた前記速度と前記速度指令とが一致するようにトルク指令を出力して速度制御を行う速度制御部と、
前記トルク指令に基づいてトルク制御を行うトルク制御部とを備えたモータの位置制御装置において、
前記位置制御部は、
前記位置指令と前記位置検出部により検出した前記位置との位置偏差を求める減算手段と、
前記位置偏差に位置比例ゲインを乗算する位置ループ乗算手段と、
前記位置指令を微分する微分器と、
前記微分器の出力にフィードフォーワード・ゲインを乗算するフィードフォーワード・ゲイン乗算手段と、
前記フィードフォーワード・ゲイン乗算手段の出力を比例微分制御して速度制御系の遅れを補償する比例微分手段と、
前記位置指令の量子化誤差によるリップルを除去する伝達関数を有して、前記比例微分手段の出力と前記フィードフォーワード・ゲイン乗算手段の出力との加算値をフィルタ処理するフィードフォーワード・ローパスフィルタと、
前記フィードフォーワード・ローパスフィルタの出力と前記位置ループ乗算手段の出力とを加算して前記速度指令を出力する加算手段とを備えていることを特徴とするモータの位置制御装置。 - 速度制御系の遅れに相当する伝達関数を有する位置制御側遅れ補償ローパスフィルタを更に備え、
前記位置指令が前記位置制御側遅れ補償ローパスフィルタを通して前記減算手段に入力されることを特徴とする請求項1に記載のモータの位置制御装置。 - 前記速度制御部が、
速度制御系の遅れに相当する伝達関数を有する速度制御側遅れ補償ローパスフィルタと、
前記速度指令を前記速度制御側遅れ補償ローパスフィルタに入力して得た遅延速度指令と前記速度との速度偏差を積分する速度積分器を含んで構成された積分制御系と、
前記速度指令と前記速度との差に比例した指令を出力する比例制御系と、
前記積分制御系の出力と前記比例制御系の出力とを加算する加算手段と、
前記加算手段の出力に速度比例ゲインを乗じて前記トルク指令を得る乗算手段とを具備している請求項1または2に記載のモータの位置制御装置。 - 前記速度制御部が、
速度制御系の遅れに相当する伝達関数を有する速度制御側遅れ補償ローパスフィルタと、
前記速度指令を前記速度制御側遅れ補償ローパスフィルタに入力して得た遅延速度指令と前記速度との速度偏差を積分する速度積分器を含み制御系中の演算値に速度比例ゲインを乗じて出力する積分制御系と、
前記速度指令と前記速度との差に速度比例ゲインを乗じた指令を出力する比例制御系と、
前記積分制御系の出力と前記比例制御系の出力とを加算する加算手段とから構成されていることを特徴とする請求項1または2に記載のモータの位置制御装置。 - 制御対象であるモータの位置を検出する位置検出部と、
前記モータの速度を算出する速度算出部と、
前記位置検出部からフィードバックされた前記モータの位置と位置指令とが一致するように速度指令を出力して位置制御をする位置制御部と、
比例積分制御により、前記速度算出部からフィードバックされた前記速度と前記速度指令とが一致するようにトルク指令を出力して速度制御を行う速度制御部と、
前記トルク指令に基づいてトルク制御を行うトルク制御部とを備えたモータの位置制御装置において、
前記位置制御部は、
前記位置指令を微分する微分器と、
前記微分器の出力にフィードフォーワード・ゲインを乗算するフィードフォーワード・ゲイン乗算手段と、
前記フィードフォーワード・ゲイン乗算手段の出力を比例微分制御して速度制御系の遅れを補償する比例微分手段と、
前記位置指令の量子化誤差によるリップルを除去する伝達関数を有して、前記比例微分手段の出力と前記フィードフォーワード・ゲイン乗算手段の出力との加算値をフィルタ処理するフィードフォーワード・ローパスフィルタと、
前記微分器の出力と前記位置検出部により検出した前記位置の微分値との偏差を積分して出力する積分器と、
前記積分器の出力に位置比例ゲインを乗算する位置ループ乗算手段と、
前記位置ループ乗算手段から出力された指令と前記フィードフォーワード・ローパスフィルタから出力された速度フィードフォーワード指令とを加算して前記速度指令として出力する加算手段とを具備することを特徴とするモータの位置制御装置。 - 速度制御系の遅れに相当する伝達関数を有する位置制御側遅れ補償ローパスフィルタが前記微分器と前記積分器との間に配置され、
前記位置制御側遅れ補償ローパスフィルタを通った前記微分器の出力と前記位置の微分値との偏差が前記積分器に入力されることを特徴とする請求項5に記載のモータの位置制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003081055A JP3892824B2 (ja) | 2003-03-24 | 2003-03-24 | モータの位置制御装置 |
| PCT/JP2004/003566 WO2004083978A1 (ja) | 2003-03-17 | 2004-03-17 | モータの制御装置 |
| US10/549,727 US7265511B2 (en) | 2003-03-17 | 2004-03-17 | Motor control device |
| HK06111362.1A HK1089517A1 (en) | 2003-03-17 | 2006-10-17 | Motor control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003081055A JP3892824B2 (ja) | 2003-03-24 | 2003-03-24 | モータの位置制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004288012A JP2004288012A (ja) | 2004-10-14 |
| JP2004288012A5 JP2004288012A5 (ja) | 2006-08-31 |
| JP3892824B2 true JP3892824B2 (ja) | 2007-03-14 |
Family
ID=33294735
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003081055A Expired - Fee Related JP3892824B2 (ja) | 2003-03-17 | 2003-03-24 | モータの位置制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3892824B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4483314B2 (ja) * | 2004-01-28 | 2010-06-16 | 株式会社安川電機 | サーボ制御装置 |
| JP2007072943A (ja) * | 2005-09-09 | 2007-03-22 | Tokyo Univ Of Agriculture & Technology | 位置制御装置 |
| JP4685071B2 (ja) * | 2007-08-08 | 2011-05-18 | 住友重機械工業株式会社 | モータ制御装置及びモータ制御方法 |
| CN102053630B (zh) * | 2011-01-18 | 2012-07-04 | 深圳市爱博科技有限公司 | 直流无刷电机纠偏控制装置及系统 |
| JP5899842B2 (ja) * | 2011-11-14 | 2016-04-06 | 株式会社明電舎 | 電動機の位置制御装置 |
| JP6011697B2 (ja) * | 2015-08-12 | 2016-10-19 | 株式会社明電舎 | 電動機の位置制御装置 |
| JP7535015B2 (ja) | 2021-07-13 | 2024-08-15 | オークマ株式会社 | 位置制御装置 |
-
2003
- 2003-03-24 JP JP2003081055A patent/JP3892824B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004288012A (ja) | 2004-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3850363B2 (ja) | モータの位置制御装置 | |
| JP3892823B2 (ja) | モータの速度制御装置 | |
| JP3739749B2 (ja) | 制御装置 | |
| JP4391218B2 (ja) | サーボ制御装置 | |
| EP1667001B1 (en) | Controller | |
| JP4231544B1 (ja) | モータ制御装置 | |
| JP4760912B2 (ja) | サーボ制御装置 | |
| JP4685071B2 (ja) | モータ制御装置及びモータ制御方法 | |
| KR20160128105A (ko) | Mdps 시스템의 복원 제어장치 | |
| WO2000075739A1 (fr) | Unite de commande de position pour moteur | |
| WO1998040801A1 (fr) | Dispositif de commande de position | |
| JP5098863B2 (ja) | 同期制御装置 | |
| JP4507110B2 (ja) | ディジタルサーボ制御装置 | |
| US7265511B2 (en) | Motor control device | |
| JP3892824B2 (ja) | モータの位置制御装置 | |
| JP2003058213A (ja) | 数値制御装置 | |
| CN111587530B (zh) | 电动机的控制装置 | |
| CN109143849B (zh) | 伺服控制装置、伺服控制方法及伺服控制系统 | |
| JP4658181B2 (ja) | サーボ制御装置 | |
| JP4483314B2 (ja) | サーボ制御装置 | |
| JP7245978B2 (ja) | 電動機の制御装置 | |
| WO2020194637A1 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP2007306779A (ja) | モータ制御装置 | |
| JP3856215B2 (ja) | 速度制御装置 | |
| JP2838578B2 (ja) | モータ制御装置、外乱負荷トルク推定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060712 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20060712 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20060807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060815 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20061121 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20061207 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3892824 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091215 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101215 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101215 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111215 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121215 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131215 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |