JP3607075B2 - 物体検出装置及びその方法 - Google Patents
物体検出装置及びその方法 Download PDFInfo
- Publication number
- JP3607075B2 JP3607075B2 JP13533198A JP13533198A JP3607075B2 JP 3607075 B2 JP3607075 B2 JP 3607075B2 JP 13533198 A JP13533198 A JP 13533198A JP 13533198 A JP13533198 A JP 13533198A JP 3607075 B2 JP3607075 B2 JP 3607075B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- image
- bright
- area
- dark
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Image Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description
【発明の属する技術分野】
本発明は、例えば、道路に据え付けられた監視カメラを画像処理によって自動化し、交通流を自動計測したり、突発事象の自動検出を行う監視システムの画像処理技術に関し、画像内の監視領域に侵入する車両を即座にかつ確実に検出するための車両侵入に使用される物体検出装置及びその方法に関する。
【0002】
【従来の技術】
近年、高速道路や幹線道路などに据え付けられた監視カメラを画像処理によって自動化し、交通流を自動計測したり突発事象を自動的に検出する監視システムの開発が求められている。
【0003】
交通流計測には従来超音波センサなどが用いられているが、超音波センサでは流量を計測するのがせいぜいであって、例えば停止車両の検出や事故車両の検出、あるいは、渋滞している場合のその原因の認識などには、広い範囲を監視できる画像処理技術の適用が望まれている。
【0004】
このように交通流の状況を自動認識するためには、画像処理技術として各車両の画像中の位置を精密に抽出する技術が必要になる。
【0005】
このためにまず、画像内に車両が侵入したことをなるべく早く検出し、検出された各車両に追跡モジュールを付与し、車両の走行軌跡を抽出する方法が多数提案されている(例えば、「”Traffic Flow Measuring System by Image Processing”K.Takahashi et.al.(MVA’96IAPR Workshop on Machine Vision Applications,1996,pp.235−248)」「特開平9−81888号 酒井邦夫:通過車両検出装置」)。
【0006】
これらの方法は、車両の侵入を検出するための車両検出領域を画像内で定めておき、予め記憶しておいた前記領域の背景画像と入力画像を比較し、輝度に変化があった場合それを侵入車両として認識する方法がとられている。
【0007】
しかし、屋外の環境で撮影された画像に対して上述の方法を適用しようとしても、車両の周囲にできる影によって後述するような誤認識が頻繁に発生する。
【0008】
一般に屋外の環境であれば車両の影が路面上に発生する。特に朝方や夕方のように影が長くなる時間帯は、車線をまたいで影が生成される。黒い色の車両と影は画像輝度ではほとんど同じであるので、路面上の輝度変化を観察するだけでは、隣の車線を走行する車両と隣の車線に生成された影を識別することができず、過剰検出などの誤認識が発生する。
【0009】
また、車両の色を問わず、車両の周囲には影を伴うのが普通である。例えば走行路の後方の上方から監視画像を撮影した場合を考えてみると、車両の下影や、車両の両脇などに影が存在する。
【0010】
したがって、路面上の輝度に変化があった領域を車両の領域とみなしたのでは、車両の領域は「車両の周りに広がる影を含んだ領域」ということになり、車両の領域が実際の領域より大きく検出される。車両領域の通過を検出することによって車両の侵入を検出する方法では、車両領域が大きくなった分だけ検出タイミングが遅れることになる。検出タイミングが遅れると、車両追跡モジュールの処理への移行に失敗する可能性が高い。高速道路など車両の速度が速い場合この失敗は顕著に現れわる。
【0011】
二つの問題への対処として、輝度の低い(暗い)領域は全て影とみなし車両としては抽出しない方法が考えられるが、それでは暗い色の車両は全て抽出されないことになってしまう。なぜなら、画像輝度としては影と黒い色の車両は殆ど同じだからである。
【0012】
したがって、従来手法に対して簡単な対処を行なっただけでは、影のために発生する、過剰検出や検出タイミングの遅れの問題は全く解決されない。
【0013】
【発明が解決しようとする課題】
以上のように、画像内で車両検出領域を設定し、その背景画像に対する輝度変化をもって車両として検出とする方法では、影と暗い色の車両の区別ができないので、隣接車線に延びた影を車両として誤って抽出したり、車両通過(車両の侵入)を検出するタイミングが影の分だけ遅れてしまうという問題があった。
【0014】
そこで本発明の目的とするところは、路面上の輝度の変化を明るい方向と暗い方向の変化に分離して考え、明るい色の車両の検出と暗い色の車両の検出とを個別に行なうことで影の誤抽出を抑え、安定して動作する車両侵入検出装置及び車両侵入検出方法を提供することにある。
【0015】
【課題を解決するための手段】
請求項1の発明は、画像中の対象領域における道路面上の物体を検出する物体検出装置において、前記対象領域中の道路面上の基準輝度に対して明るい方向へ輝度変動した明方向情報を求める明方向情報演算手段と、前記対象領域中の前記基準輝度に対して明暗両方向へ輝度変動した双方向情報を求める双方向情報演算手段と、前記明方向情報から前記基準輝度より高い輝度を有する明色物体を検出する明色物体検出手段と、前記双方向情報に含まれる明色物体、暗色物体、影の領域から前記検出された前記明色物体の領域を除くと共に、光源の方向から影の延びる方向を推定して前記影の領域を除いた前記暗色物体を検出する物体判定手段と、を具備することを特徴とする物体検出装置である。
【0016】
請求項2の発明は、前記双方向情報演算手段は、前記対象領域中の前記基準輝度に対して暗い方向へ輝度変動した暗方向情報を求める暗方向情報演算手段と、この暗方向情報と前記明方向情報演算手段より求めた明方向情報の論理和から双方向情報を演算することを特徴とする請求項1記載の物体検出装置である。
【0017】
請求項3の発明は、前記物体が車両であることを特徴とする請求項1記載の物体検出装置である。
【0018】
請求項4の発明は、前記画像が時空間画像であることを特徴とする請求項1記載の物体検出装置である。
【0019】
請求項5の発明は、画像中の対象領域における道路面上の物体を検出する物体検出方法において、前記対象領域中の道路面上の基準輝度に対して明るい方向へ輝度変動した明方向情報を求める明方向情報演算ステップと、前記対象領域中の前記基準輝度に対して明暗両方向へ輝度変動した双方向情報を求める双方向情報演算ステップと、前記明方向情報から前記基準輝度より高い輝度を有する明色物体を検出する明色物体検出ステップと、前記双方向情報に含まれる明色物体、暗色物体、影の領域から前記検出された前記明色物体の領域を除くと共に、光源の方向から影の延びる方向を推定して前記影の領域を除いた前記暗色物体を検出する物体判定ステップと、を具備することを特徴とする物体検出方法である。
【0020】
これにより、例えば、明るい色の系統の車両は明方向変化から検出することで侵入検知タイミングを遅らさずに検出することができ、明方向変化と双方向変化から論理的に影と暗い色の車両を識別することができ、影の領域を誤抽出することのない車両侵入検出装置を構成することでき、自動化された交通監視システムの実現に途が開かれる。
【0021】
【発明の実施の形態】
以下、本発明の実施例について図面を参照して説明する。
【0022】
実 施 例 1
図1は本発明の実施例1を示すブロック図である。
【0023】
図1の車両侵入検出装置10は、画像入力部11、画像領域抽出部12、画像演算部13、基準輝度記憶部14、明領域記憶部16、変化領域記憶部15、車両判定部17、検出記録部18、出力部19から構成される。
【0024】
(画像入力部11)
画像入力部11によって撮影された画像はA/D変換され、画像領域抽出部12に送信される。
【0025】
(画像領域抽出部12)
画像領域抽出部12は画像内部で車両の侵入を検出するための画像領域を切り出す。今後この画像領域を「車両検出領域」と呼ぶ。
【0026】
車両検出領域は図2に示すように画像内に侵入する車両の経路に交わるように設定された細長い領域である。車両検出領域の形状は矩形に限るものではなく、要するに車両が画像内に侵入するときに必ず交差するように設定すれば良い。
【0027】
本実施例では縦1画素で横幅が比較的長い長方形の画像領域を車両検出領域として切り出した場合について説明する。
【0028】
実施例1では、画像入力部11で入力されるのは任意の時間間隔で撮影された動画像である。通常のTVカメラであれば、時間間隔は一定で1/30秒ごとに1枚の画像が入力されることになる。この1枚の画像を一般に画像1フレームと言う。
【0029】
画像領域抽出部12で切り出された部分画像は画像演算部13に送信され、そこで基準輝度記憶部14のデータと照合される。
【0030】
(基準輝度記憶部14)
基準輝度記憶部14に記憶されているデータは、画像領域抽出部12が切り出す車両検出領域の基準輝度のデータである。このデータは車両検出領域の各画素の位置ごとに記憶されている。具体的には車両が存在しない場合の道路面の輝度値がそれぞれの画素の位置で個別に記憶されている。これを説明上背景データと呼ぶことにする。
【0031】
背景データは事前に設定するデータである。
【0032】
背景データを作成するには、例えば車両が存在しない状態で監視領域を撮影し、当該領域を切り出して記憶すれば良い。
【0033】
また、例えば検出する時間までの定めた時間内(例えば3分間)における輝度の時間平均値を用いたり、定めた時間内の輝度の最頻値(モード)を用いたりすれば良い。平均値や最頻値を使う方法は、画像入力部11で用いるカメラが固定されていない場合(ズーム量やカメラ光軸の角度などが変化し、入力される画像に変化がある場合)に有効である。
【0034】
背景データの作成方法は他にも多数存在する。
【0035】
(画像演算部13)
画像演算部13は、切出された画像領域の各位置に対して、入力データと背景データの比較演算を行なう。
【0036】
位置xにおける入力データをI(x),背景データをB(x)とした時、以下の式(1),(2) に従ってF(x),G(x)を算出し、変化領域記憶部15にF(x)を、明領域記憶部16にG(x)を送信する。
【0037】
【数1】
【0038】
変化領域記憶部15と明領域記憶部16は各画素位置の変化量を受信し、各時刻における変化量を蓄積することでデータを時空間画像として記憶している。
【0039】
時空間画像は図3で示すように横軸を検出領域の延長方向(空間軸)、縦軸を時間方向(時間軸)にして構成されている。画像演算部13から送信される変化量に対して閾値を設定し、変化のある/無しによって2値化すると、時空間画像は2値画像となる。
【0040】
このとき、画像内に侵入した車両は図3に示すように時空間画像内で固まりとなる。これを「時空間画像内の車両領域」と呼ぶ。
【0041】
時空間画像内の車両領域を時間軸の方向で見た時の限界(これを今後「後端部」と呼ぶ)が、車両全体が車両検出領域を通過した時刻に対応する。時空間画像では速度の遅い車が時間方向に大きな固まりとして、速度の速い車は時間方向に小さな固まりとして現われる。
【0042】
時空間画像は時間の経過とともに時間軸方向に大きくなっていくが、このあとの処理に必要なのは処理したい時刻からある程度さかのぼった時間分だけである。
【0043】
具体的には画像中の車両検出領域を1台の車が通過するのに必要な最大時間であり、例えば渋滞時などに画像中の1ラインを30秒かかって通過するとすれば、30秒を少し越える程度の時間分記憶しておけば良い。
【0044】
計算機メモリなどに実装する場合は、循環バッファを用いれば有限のサイズの記憶装置で実現できる。
【0045】
さて、式(1),(2) で定義されたF(x),G(x)を時間方向に積算し時空間画像を生成すると、変化領域記憶部15と明領域記憶部16に生成される時空間画像はそれぞれ図4で示した模式図のようになる。
【0046】
すなわち、変化領域記憶部15には双方向の輝度変化で生成した時空間画像(これを今後「時空間画像A」と呼ぶ)が記憶され、明領域記憶部16には明るい方向の輝度変化だけで生成した時空間画像(これを今後「時空間画像B」と呼ぶ)が記憶されることになる。式(1),(2) の定義により、時空間画像Bの変化領域は、時空間画像Aの変化領域に完全に含まれることになる。
【0047】
そして、時空間画像Aには暗い色の車両も明るい色の車両も(また、車両の影の領域も)変化領域として検出され、時空間画像Bには(路面の輝度値より)明るい色の車両だけが検出される。
【0048】
なお、車両の影の領域への対処方法は後で説明する。
【0049】
また、一般に車両の周囲には、車両がどのような色であっても、影が存在するので、時空間画像Bで検出される車両の領域に比べて、時空間画像Aで検出される車両の領域は大きい。例えば、走行路を後方の上方から撮影した場合には、車両の後端部には車の下にできる影が観測されることが多い、すなわち、明るい色の車両を時空間画像Aだけで検出したのでは検出タイミングが遅れることになる。この問題点を解決できるのが本発明の一つの効果である。
【0050】
(車両判定部17)
車両判定部17の動作と、変化領域記憶部15及び明領域記憶部16との信号のやり取りを図6のフローチャートを用いて説明する。
【0051】
変化領域記憶部15及び明領域記憶部16の時空間画像は、画像入力部11から画像が入力されるたびに更新し、更新された当該時空間画像に対してラベリング処理を逐次施している。(ステップ 601)
変化領域記憶部15及び明領域記憶部16は、常に新しいラベルの検出とその連続性を検査しており(ステップ602,ステップ606 に相当する)、ラベルの後端部(つまり車両全体が画像内に侵入し終わったタイミング)が現われるとすぐに、車両判定処理(ステップ603,ステップ607 )を実行するようになっている。
【0052】
また、車両判定処理に先だって時空間画像Aと時空間画像Bで検出される車両領域を車線別に分割しておく。車線別に分割する簡単な方法としては時空間画像内における車線位置で領域を分割または分類すれば良い。この方法は、入力カメラや車両検出領域が固定されており、車線位置が事前に分かっている場合に適用可能である。
【0053】
入力カメラの設置状況によっては入力画像の遠近感が大きく、車線位置と車両の切れ目が一致しない場合がある。例えばカメラを路面の上方から下向きに設定した場合、車高の高い車の天井部分はカメラに近いため、車両の幅が車線幅より大きく映り、車線をはみ出す様に見える場合がある。しかし、このような状況であってもカメラの位置や角度と車両の高さはある範囲に収まることが事前に推定できるので、車両の画像中の横幅がどのような範囲で投影されるのかも事前に推定できる。したがって、時空間画像内でのエッジ探索による領域分割や、画像中の車両のサイズの最大値や最小値の情報などを使えば、時空間画像内に検出された車両領域を車線ごとに分割または分類することは可能である。
【0054】
明るい色の車両が画像中に侵入すると、二つの時空間画像にそれぞれ新しいラベルが検出され、図4の模式図のように、まず時空間画像Bで当該ラベルの後端部が検出される。(ステップ 602)
時空間画像Bで後端部が検出されたら、続いて車両判定処理Bを実行する。車両判定処理Bは検出されたラベルの横幅が事前に決めた判断値より大きいかどうかを調べ、領域が車両であるか判定する。このようにして、道路に映った街頭の反射光やヘッドライトの反射光による誤抽出を抑止する。(ステップ 603)
車両であると判定された場合には、当該タイミングと当該位置において車両が存在したことを検出記録部18に記憶し、出力部19から仕様に基づき情報を出力する。(ステップ604,ステップ605 )
時空間画像Aで車両後端が検出された場合(ステップ 606)、時空間画像Aで検出される車両領域は、明るい色の車両、暗い色の車両、影、の3つの可能性がある。この3つを識別するために、車両判定処理Aを実行する。(ステップ 607)
車両判定処理Aの詳細については後で説明する。ここで車両と判定された場合には(ステップ 608)、出力部19から仕様に基づき情報を出力する。(ステップ 609)
以上で一つのフレームに対する処理が終了し、次の画像を入力し、全体の処理が繰り返される。(ステップ 610)
図7は車両判定処理Aの処理の流れである。
【0055】
時空間画像Aで検出される車両領域は、明るい色の車両、暗い色の車両、影、の3つの可能性がある。図4の模式図のような単純な時空間画像の例では、内部に車両を含まず影だけで生成された領域は存在しないので、時空間画像Aで車両領域が検出された時には全ての領域を車両と判別して問題無い。もし、時空間画像Bを用いて明るい色の車を別途抽出しているのなら、重複の無い様に出力すれば良いだけである。
【0056】
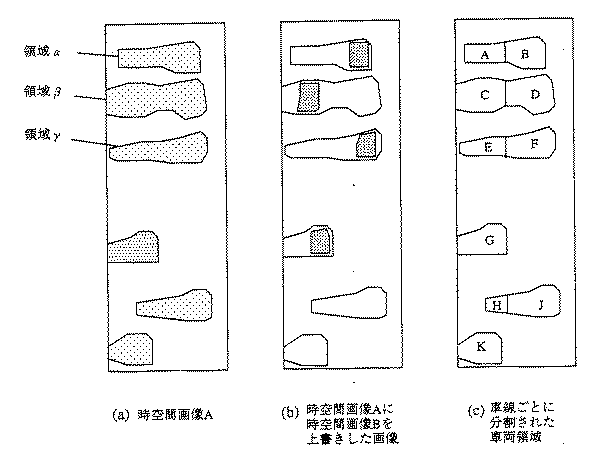
しかし、屋外環境で撮影した実際の画像の場合は時空間画像は図5の模式図の様になる。図5の模式図では、光源(太陽)が画像の右側に存在し、影が車両位置から画像上の左方向の伸びている様子を示している。このような状況で車両の領域と影の領域を識別するために、図7の車両判定処理Aの処理を実行する。
【0057】
処理に先だって、時空間画像内の車両領域を車線ごとに分割または分類しておく、時空間画像に影の領域が存在する場合、分割された領域は図5(c)のようになる。これらの領域を時間的に早く現われた順に一つずつ検証する。図5(c)では説明のために「領域A」から「領域K」まで、時間的に早く現われた順に(早く後端部が現われた順に)記号を付与してある。従来の技術であればこれらの全ての領域が車両として抽出されてしまう。本発明を適用すれば車両だけが抽出される。
【0058】
まずステップ 701で、同じ時空間領域が明るい色の車両として、時空間画像Bから抽出されているか調べる。この情報は検出記録部18に記録されている。もし既に車両として抽出した時空間領域であれば(図5(c)で言えば、時空間画像Bで抽出される、領域B、領域C、領域F、領域Gがそうである)、ステップ 705へ進み、重複を避けるために車両ではないと判別する。
【0059】
車両として抽出されていない時空間領域であればステップ 702に進む。ステップ 702では光源(太陽)の方向を知識として影の延びる方向を推定し、影と車両の判別を行なう。カメラの設定位置と角度が既知であれば光源の方向も既知にできる。時空間画像内で車両領域が隣接して存在する場合は、光源側の領域は必ず車両であるので、車両と判別しステップ 704に進む。
【0060】
例えば、図5(c)であれば、領域Aと領域B、領域Cと領域D、領域Eと領域F、領域Hと領域J、が隣り合っているが、光源側の領域B、領域D、領域F、領域Jは影ではありえない。このような領域を車両として判別するのである(ただし、領域B、領域Fに関しては車両判定処理Bにより既に車両として検出されている。)。図5(c)の例の場合は領域Dと領域Jが車両として判別される。また、領域Kも光源側に隣接する領域が存在しないので車両として判別される。
【0061】
ステップ 701とステップ 702によっても車両とも車両でないとも判別できなかった領域はステップ 703によって判別する。この判別は、車両の場合には画像中でテクスチャがあるが、影の場合はテクスチャが無い、という知識を使って行なう。
【0062】
テクスチャの有無の判別は、例えば領域内の画像輝度の分散を計算し一定値以上の分散値があればテクスチャがあると判断すれば良い。
【0063】
なおここでさらに、時空間における車両領域の大きさに関する判断値を用いて、車両としては小さすぎる領域を棄却するなどとすれば、画像のノイズに対する頑強性を増加させることができる。
【0064】
ところで、ここでは影の領域はテクスチャが無いという知識を使った。ステップ 701とステップ 702を経ずに、すべての領域に対してこの判断基準を用いると識別を誤る場合が時々ある。車両の中にはボンネットの色が単色で模様が殆どないものも多くあり、画像の撮影状況によっては車両のテクスチャ成分がほとんど抽出できない場合もあるからである。このために、テクスチャ成分だけで影を判別するのでは高い認識精度が得られない。
【0065】
したがって、本発明ではテクスチャ成分だけで影か影でないかを判別する対象が領域の全てになることを避けるために、車両判定処理Bやステップ 701やステップ 702などでも判別できなかったものだけについて、テクスチャ成分を用いる判別を実施する。ステップ 703に至る状況とは、「光源側に隣接する車線を走行する車両の影に完全に入ってしまった暗い色の車両」であり、非常に稀な状況と言える。誤識別が発生するのは、さらに、「前述した車両にテクスチャ成分がほとんど検出されない場合」に限られる。したがって、認識精度は高く維持できるのである。
【0066】
図5(c)でステップ 703の対象となるのは、領域A、領域E、領域Hである。本実施例では3つの領域とも分散値が低く影として判別されたことにする。
【0067】
以上の手続きにより、図5の例ならば7台の車両が検出されることになる。まず車両判定処理Bにより、領域B、領域C、領域F、領域Gの明るい色の車両が検出され、車両判定処理Aにより、領域D、領域J、領域Kの車両が検出されている。
【0068】
本発明を適用することによって、図5のように影の存在する複雑な状況でも影の誤抽出がなく車両を正しく検出することが可能となる。
【0069】
検出タイミングに関しては、明るい色の系統の車両は車両の周囲に生成される影に影響されず、通過すると即座に検出できる。暗い色の系統の車両に関しては影と車両の分離はできないので検出タイミングは若干遅れたままである。しかし通過車両のうち明るい色の車両が50%であるとすれば、50%について結果が改善されている。
【0070】
実 施 例 2
実施例1では式(1),(2) で定義したように、基準輝度に対する変化を正負両方向の変化量F(x)と、明るい方向の変化量G(x)に分離した。
【0071】
本発明の主眼とするところは基準輝度に関する輝度変化を、変化の方向別に扱うことにあるので、もちろん、以下の式(3),(4) のように変化量を分離しても良い。
【0072】
【数2】
【0073】
【数3】
【0074】
実 施 例 3
本発明は高速道路の監視カメラに適用可能な画像処理を想定しているために、画像入力部11で入力される画像は動画像であることを想定し、実施例1と実施例2の説明を行なった。しかし本発明の主眼とするところの、「基準輝度に対する変化を符号情報を合わせて記憶し処理する」ということに関しては動画像処理に限らず応用可能である。
【0075】
即ち、入力される画像が静止画であり、そこから影の領域と車両の領域を識別する装置または識別方法にも応用可能である。この場合画像領域抽出部12が切り出す画像領域は「入力画像の全体」となったり、図2の例のように小さい領域に対して処理を施すのでなく、切り出す画像領域が非常に大きいと考えれば良い。
【0076】
従来手法では、背景画像に対して入力画像との差分演算を行ない、変化量の絶対値を用いて車両の存在領域を抽出し、その領域内で予め定めた値より輝度が小さい領域を影として分離する。従来技術の課題として挙げたように、この従来手法では暗い色の車両の大部分が影領域として誤抽出され、車両領域の固まりとして抽出できない。
【0077】
本発明に従って背景画像に対する変化を符合別に抽出すれば、明るい色の車両をまず確実に抽出することができ、その結果、明るい色の車両の周囲に存在する影を影として抽出することができ、光源の反対方向に延びる影を影として抽出することができる。この結果、従来手法に比べて車両領域の抽出精度を向上させることができる。
【0078】
【発明の効果】
本発明によれば、影を物体として抽出することなく、また明るい色の物体であれば物体の周囲に存在する影に起因した検出遅れをおこすことなく、物体が検出できる。
【0079】
この結果、高速道路の監視カメラなどから車両の流量を自動計測したり、突発事象の検出を自動的に行なう監視システムの実現に対して重要な役割を果たすことができる。この実用的効果はまことに大きい。
【図面の簡単な説明】
【図1】本発明の一実施例を示すブロック図である。
【図2】画像領域抽出部が切出す車両検出領域の図である。
【図3】時空間画像の模式図である。
【図4】影が少ない時空間画像の模式図である。
【図5】影が多い時空間画像の模式図である。
【図6】処理全体のフローチャートである。
【図7】車両判定処理のフローチャートである。
【符号の説明】
10 車両侵入検出装置
11 画像入力部
12 画像領域抽出部
13 画像演算部
14 基準輝度記憶部
15 変化領域記憶部
16 明領域記憶部
17 車両判定部
18 検出記録部
19 出力部
Claims (5)
- 画像中の対象領域における道路面上の物体を検出する物体検出装置において、
前記対象領域中の道路面上の基準輝度に対して明るい方向へ輝度変動した明方向情報を求める明方向情報演算手段と、
前記対象領域中の前記基準輝度に対して明暗両方向へ輝度変動した双方向情報を求める双方向情報演算手段と、
前記明方向情報から前記基準輝度より高い輝度を有する明色物体を検出する明色物体検出手段と、
前記双方向情報に含まれる明色物体、暗色物体、影の領域から前記検出された前記明色物体の領域を除くと共に、光源の方向から影の延びる方向を推定して前記影の領域を除いた前記暗色物体を検出する物体判定手段と、
を具備する
ことを特徴とする物体検出装置。 - 前記双方向情報演算手段は、
前記対象領域中の前記基準輝度に対して暗い方向へ輝度変動した暗方向情報を求める暗方向情報演算手段と、この暗方向情報と前記明方向情報演算手段より求めた明方向情報の論理和から双方向情報を演算する
ことを特徴とする請求項1記載の物体検出装置。 - 前記物体が車両である
ことを特徴とする請求項1記載の物体検出装置。 - 前記画像が時空間画像である
ことを特徴とする請求項1記載の物体検出装置。 - 画像中の対象領域における道路面上の物体を検出する物体検出方法において、
前記対象領域中の道路面上の基準輝度に対して明るい方向へ輝度変動した明方向情報を求める明方向情報演算ステップと、
前記対象領域中の前記基準輝度に対して明暗両方向へ輝度変動した双方向情報を求める双方向情報演算ステップと、
前記明方向情報から前記基準輝度より高い輝度を有する明色物体を検出する明色物体検出ステップと、
前記双方向情報に含まれる明色物体、暗色物体、影の領域から前記検出された前記明色物体の領域を除くと共に、光源の方向から影の延びる方向を推定して前記影の領域を除いた前記暗色物体を検出する物体判定ステップと、
を具備する
ことを特徴とする物体検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP13533198A JP3607075B2 (ja) | 1998-05-18 | 1998-05-18 | 物体検出装置及びその方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP13533198A JP3607075B2 (ja) | 1998-05-18 | 1998-05-18 | 物体検出装置及びその方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11328373A JPH11328373A (ja) | 1999-11-30 |
| JP3607075B2 true JP3607075B2 (ja) | 2005-01-05 |
Family
ID=15149275
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP13533198A Expired - Fee Related JP3607075B2 (ja) | 1998-05-18 | 1998-05-18 | 物体検出装置及びその方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3607075B2 (ja) |
-
1998
- 1998-05-18 JP JP13533198A patent/JP3607075B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11328373A (ja) | 1999-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8902053B2 (en) | Method and system for lane departure warning | |
| US11482016B2 (en) | Division line recognition apparatus | |
| US10943131B2 (en) | Image based lane marking classification | |
| CN102231236B (zh) | 车辆计数方法和装置 | |
| KR101742490B1 (ko) | 끼어들기 위반차량 단속 시스템 및 그 방법 | |
| US7577274B2 (en) | System and method for counting cars at night | |
| CN104361350A (zh) | 一种交通标识识别系统 | |
| JP7125843B2 (ja) | 障害検知システム | |
| US20110216944A1 (en) | In-vehicle white line recognition apparatus | |
| CN102941851B (zh) | 车道标识线识别可靠度提高系统及其方法 | |
| CN110766949A (zh) | 违章抓拍方法及装置 | |
| CN103164685A (zh) | 车灯检测方法和车灯检测设备 | |
| Munajat et al. | Vehicle detection and tracking based on corner and lines adjacent detection features | |
| KR100967456B1 (ko) | 철도건널목 지장물 영상 검지장치 및 그 제어방법 | |
| CN110660225A (zh) | 闯红灯行为检测方法、装置和设备 | |
| JP3607075B2 (ja) | 物体検出装置及びその方法 | |
| CN117058634B (zh) | 一种高速路场景自适应交通违法行为识别方法 | |
| JPH08317373A (ja) | 映像監視装置における物体検出方式及び物体抽出方式 | |
| JP4972596B2 (ja) | 交通流計測装置 | |
| US12511909B2 (en) | Occluded oncoming vehicles detection systems and methods | |
| KR20040051777A (ko) | 유고 감지 방법 | |
| JPH11219493A (ja) | 交通情報処理方法 | |
| Wangsiripitak et al. | Traffic light and crosswalk detection and localization using vehicular camera | |
| KR100853444B1 (ko) | 교통 사고의 발생 여부를 감지하는 방법 | |
| JP2885216B2 (ja) | 車線変更検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040604 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040608 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040722 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040928 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041006 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081015 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081015 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091015 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101015 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111015 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111015 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121015 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131015 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |