JP2023503638A - 改良されたx線イメージングシステム - Google Patents
改良されたx線イメージングシステム Download PDFInfo
- Publication number
- JP2023503638A JP2023503638A JP2022531392A JP2022531392A JP2023503638A JP 2023503638 A JP2023503638 A JP 2023503638A JP 2022531392 A JP2022531392 A JP 2022531392A JP 2022531392 A JP2022531392 A JP 2022531392A JP 2023503638 A JP2023503638 A JP 2023503638A
- Authority
- JP
- Japan
- Prior art keywords
- ray
- detector
- data
- image
- sub
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 594
- 230000001976 improved effect Effects 0.000 title claims description 13
- 238000000034 method Methods 0.000 claims abstract description 645
- 239000000463 material Substances 0.000 claims abstract description 272
- 238000000354 decomposition reaction Methods 0.000 claims abstract description 111
- 230000005855 radiation Effects 0.000 claims abstract description 101
- 238000004422 calculation algorithm Methods 0.000 claims abstract description 83
- 230000009977 dual effect Effects 0.000 claims abstract description 79
- 230000001965 increasing effect Effects 0.000 claims abstract description 15
- 238000005259 measurement Methods 0.000 claims description 703
- 239000002245 particle Substances 0.000 claims description 252
- 230000033001 locomotion Effects 0.000 claims description 166
- 239000002872 contrast media Substances 0.000 claims description 148
- 238000012545 processing Methods 0.000 claims description 133
- 230000003595 spectral effect Effects 0.000 claims description 120
- 238000003325 tomography Methods 0.000 claims description 118
- 238000004846 x-ray emission Methods 0.000 claims description 114
- 230000003287 optical effect Effects 0.000 claims description 96
- 230000008569 process Effects 0.000 claims description 96
- 230000007246 mechanism Effects 0.000 claims description 77
- 239000000126 substance Substances 0.000 claims description 76
- 238000000701 chemical imaging Methods 0.000 claims description 62
- 239000011159 matrix material Substances 0.000 claims description 61
- 229910052791 calcium Inorganic materials 0.000 claims description 40
- 239000011575 calcium Substances 0.000 claims description 40
- OYPRJOBELJOOCE-UHFFFAOYSA-N Calcium Chemical compound [Ca] OYPRJOBELJOOCE-UHFFFAOYSA-N 0.000 claims description 39
- 238000011144 upstream manufacturing Methods 0.000 claims description 39
- 239000007943 implant Substances 0.000 claims description 38
- 230000006854 communication Effects 0.000 claims description 36
- 238000003860 storage Methods 0.000 claims description 36
- 238000004891 communication Methods 0.000 claims description 35
- 238000010521 absorption reaction Methods 0.000 claims description 33
- 238000009826 distribution Methods 0.000 claims description 28
- 238000002604 ultrasonography Methods 0.000 claims description 28
- 238000002595 magnetic resonance imaging Methods 0.000 claims description 27
- 238000012636 positron electron tomography Methods 0.000 claims description 27
- 210000004204 blood vessel Anatomy 0.000 claims description 24
- 238000012831 peritoneal equilibrium test Methods 0.000 claims description 24
- 238000012877 positron emission topography Methods 0.000 claims description 24
- 238000013519 translation Methods 0.000 claims description 21
- 238000012546 transfer Methods 0.000 claims description 19
- 230000002238 attenuated effect Effects 0.000 claims description 13
- 238000002603 single-photon emission computed tomography Methods 0.000 claims description 13
- 239000011358 absorbing material Substances 0.000 claims description 12
- 238000004088 simulation Methods 0.000 claims description 11
- UXVMQQNJUSDDNG-UHFFFAOYSA-L Calcium chloride Chemical compound [Cl-].[Cl-].[Ca+2] UXVMQQNJUSDDNG-UHFFFAOYSA-L 0.000 claims description 10
- 239000001110 calcium chloride Substances 0.000 claims description 10
- 229910001628 calcium chloride Inorganic materials 0.000 claims description 10
- 239000003153 chemical reaction reagent Substances 0.000 claims description 10
- 238000009607 mammography Methods 0.000 claims description 10
- 230000005534 acoustic noise Effects 0.000 claims description 9
- 229910052751 metal Inorganic materials 0.000 claims description 9
- 229910052788 barium Inorganic materials 0.000 claims description 8
- DSAJWYNOEDNPEQ-UHFFFAOYSA-N barium atom Chemical compound [Ba] DSAJWYNOEDNPEQ-UHFFFAOYSA-N 0.000 claims description 8
- 239000002184 metal Substances 0.000 claims description 8
- 238000007674 radiofrequency ablation Methods 0.000 claims description 8
- 208000004434 Calcinosis Diseases 0.000 claims description 7
- 238000012549 training Methods 0.000 claims description 7
- 230000001131 transforming effect Effects 0.000 claims description 7
- 239000013598 vector Substances 0.000 claims description 7
- 238000000342 Monte Carlo simulation Methods 0.000 claims description 6
- 239000008186 active pharmaceutical agent Substances 0.000 claims description 5
- 229910052797 bismuth Inorganic materials 0.000 claims description 5
- JCXGWMGPZLAOME-UHFFFAOYSA-N bismuth atom Chemical compound [Bi] JCXGWMGPZLAOME-UHFFFAOYSA-N 0.000 claims description 5
- 238000013170 computed tomography imaging Methods 0.000 claims description 5
- 238000013480 data collection Methods 0.000 claims description 5
- 238000005192 partition Methods 0.000 claims description 5
- 229910052712 strontium Inorganic materials 0.000 claims description 5
- CIOAGBVUUVVLOB-UHFFFAOYSA-N strontium atom Chemical compound [Sr] CIOAGBVUUVVLOB-UHFFFAOYSA-N 0.000 claims description 5
- 238000011049 filling Methods 0.000 claims description 4
- 210000003709 heart valve Anatomy 0.000 claims description 4
- 230000000670 limiting effect Effects 0.000 claims description 4
- 239000006249 magnetic particle Substances 0.000 claims description 4
- 239000012528 membrane Substances 0.000 claims description 4
- 229910052688 Gadolinium Inorganic materials 0.000 claims description 3
- UIWYJDYFSGRHKR-UHFFFAOYSA-N gadolinium atom Chemical compound [Gd] UIWYJDYFSGRHKR-UHFFFAOYSA-N 0.000 claims description 3
- 229910052602 gypsum Inorganic materials 0.000 claims description 3
- 239000010440 gypsum Substances 0.000 claims description 3
- 239000011505 plaster Substances 0.000 claims description 3
- 239000007769 metal material Substances 0.000 claims description 2
- 239000012780 transparent material Substances 0.000 claims description 2
- 238000005297 material degradation process Methods 0.000 claims 1
- 238000005316 response function Methods 0.000 abstract description 32
- 230000002829 reductive effect Effects 0.000 abstract description 22
- 239000010410 layer Substances 0.000 description 139
- 239000000523 sample Substances 0.000 description 122
- 210000001519 tissue Anatomy 0.000 description 108
- 230000000875 corresponding effect Effects 0.000 description 100
- 210000000988 bone and bone Anatomy 0.000 description 89
- 210000004027 cell Anatomy 0.000 description 89
- 210000004872 soft tissue Anatomy 0.000 description 84
- 238000001514 detection method Methods 0.000 description 78
- 230000006870 function Effects 0.000 description 65
- 238000004458 analytical method Methods 0.000 description 52
- 239000000203 mixture Substances 0.000 description 46
- 230000000694 effects Effects 0.000 description 41
- 238000012544 monitoring process Methods 0.000 description 41
- 238000010276 construction Methods 0.000 description 39
- 230000009021 linear effect Effects 0.000 description 39
- 230000035945 sensitivity Effects 0.000 description 39
- 229960005069 calcium Drugs 0.000 description 38
- 238000001228 spectrum Methods 0.000 description 37
- 238000003745 diagnosis Methods 0.000 description 36
- 239000012530 fluid Substances 0.000 description 31
- 238000011282 treatment Methods 0.000 description 31
- 229910052739 hydrogen Inorganic materials 0.000 description 30
- 206010028980 Neoplasm Diseases 0.000 description 28
- 238000010894 electron beam technology Methods 0.000 description 28
- 239000000243 solution Substances 0.000 description 28
- 238000013461 design Methods 0.000 description 26
- 230000003993 interaction Effects 0.000 description 23
- 238000003491 array Methods 0.000 description 22
- 239000002131 composite material Substances 0.000 description 22
- 238000005286 illumination Methods 0.000 description 22
- 238000009795 derivation Methods 0.000 description 21
- 238000010606 normalization Methods 0.000 description 21
- 238000012937 correction Methods 0.000 description 20
- 230000002123 temporal effect Effects 0.000 description 19
- 238000004364 calculation method Methods 0.000 description 18
- 238000012512 characterization method Methods 0.000 description 18
- 230000001225 therapeutic effect Effects 0.000 description 18
- 230000001276 controlling effect Effects 0.000 description 17
- 230000005540 biological transmission Effects 0.000 description 16
- 238000001574 biopsy Methods 0.000 description 15
- 238000007781 pre-processing Methods 0.000 description 15
- 230000004044 response Effects 0.000 description 15
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 14
- 238000006073 displacement reaction Methods 0.000 description 14
- 238000013152 interventional procedure Methods 0.000 description 14
- 241001465754 Metazoa Species 0.000 description 13
- 210000004369 blood Anatomy 0.000 description 13
- 239000008280 blood Substances 0.000 description 13
- 238000013135 deep learning Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 13
- 201000010099 disease Diseases 0.000 description 13
- 239000007788 liquid Substances 0.000 description 13
- 238000012805 post-processing Methods 0.000 description 12
- 238000012800 visualization Methods 0.000 description 12
- 230000008901 benefit Effects 0.000 description 11
- 230000008859 change Effects 0.000 description 11
- 238000001739 density measurement Methods 0.000 description 11
- 108090000623 proteins and genes Proteins 0.000 description 11
- 230000000007 visual effect Effects 0.000 description 11
- 238000006243 chemical reaction Methods 0.000 description 10
- 239000000562 conjugate Substances 0.000 description 10
- 230000002596 correlated effect Effects 0.000 description 10
- 230000001419 dependent effect Effects 0.000 description 10
- 238000010801 machine learning Methods 0.000 description 10
- 102000004169 proteins and genes Human genes 0.000 description 10
- 238000011002 quantification Methods 0.000 description 10
- 230000009467 reduction Effects 0.000 description 10
- 238000011160 research Methods 0.000 description 10
- 230000011218 segmentation Effects 0.000 description 10
- 230000001360 synchronised effect Effects 0.000 description 10
- 238000002560 therapeutic procedure Methods 0.000 description 10
- 108091006146 Channels Proteins 0.000 description 9
- 230000000712 assembly Effects 0.000 description 9
- 238000000429 assembly Methods 0.000 description 9
- 229960002713 calcium chloride Drugs 0.000 description 9
- 238000005516 engineering process Methods 0.000 description 9
- 238000001727 in vivo Methods 0.000 description 9
- 230000005055 memory storage Effects 0.000 description 9
- 238000012634 optical imaging Methods 0.000 description 9
- 230000035699 permeability Effects 0.000 description 9
- 238000002360 preparation method Methods 0.000 description 9
- 238000013456 study Methods 0.000 description 9
- 238000007689 inspection Methods 0.000 description 8
- 239000011133 lead Substances 0.000 description 8
- 238000000691 measurement method Methods 0.000 description 8
- 238000004445 quantitative analysis Methods 0.000 description 8
- 230000017531 blood circulation Effects 0.000 description 7
- 201000011510 cancer Diseases 0.000 description 7
- 238000007405 data analysis Methods 0.000 description 7
- 230000004907 flux Effects 0.000 description 7
- -1 gadonolium Substances 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 6
- 206010047571 Visual impairment Diseases 0.000 description 6
- HCHKCACWOHOZIP-UHFFFAOYSA-N Zinc Chemical compound [Zn] HCHKCACWOHOZIP-UHFFFAOYSA-N 0.000 description 6
- 238000002679 ablation Methods 0.000 description 6
- 229910052782 aluminium Inorganic materials 0.000 description 6
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 6
- 239000004227 calcium gluconate Substances 0.000 description 6
- 229960004494 calcium gluconate Drugs 0.000 description 6
- 235000013927 calcium gluconate Nutrition 0.000 description 6
- NEEHYRZPVYRGPP-UHFFFAOYSA-L calcium;2,3,4,5,6-pentahydroxyhexanoate Chemical compound [Ca+2].OCC(O)C(O)C(O)C(O)C([O-])=O.OCC(O)C(O)C(O)C(O)C([O-])=O NEEHYRZPVYRGPP-UHFFFAOYSA-L 0.000 description 6
- 239000003814 drug Substances 0.000 description 6
- 239000000835 fiber Substances 0.000 description 6
- 239000012216 imaging agent Substances 0.000 description 6
- 239000002105 nanoparticle Substances 0.000 description 6
- 238000009659 non-destructive testing Methods 0.000 description 6
- 230000002285 radioactive effect Effects 0.000 description 6
- 238000001959 radiotherapy Methods 0.000 description 6
- 150000003384 small molecules Chemical class 0.000 description 6
- 238000004611 spectroscopical analysis Methods 0.000 description 6
- 229910052725 zinc Inorganic materials 0.000 description 6
- 239000011701 zinc Substances 0.000 description 6
- 101100400624 Caenorhabditis elegans mbr-1 gene Proteins 0.000 description 5
- 238000001712 DNA sequencing Methods 0.000 description 5
- 108010003723 Single-Domain Antibodies Proteins 0.000 description 5
- 238000013459 approach Methods 0.000 description 5
- 238000013016 damping Methods 0.000 description 5
- 238000002405 diagnostic procedure Methods 0.000 description 5
- 239000010408 film Substances 0.000 description 5
- 238000001914 filtration Methods 0.000 description 5
- 210000002216 heart Anatomy 0.000 description 5
- 238000002347 injection Methods 0.000 description 5
- 239000007924 injection Substances 0.000 description 5
- 238000000386 microscopy Methods 0.000 description 5
- 238000005457 optimization Methods 0.000 description 5
- 210000000056 organ Anatomy 0.000 description 5
- 230000000737 periodic effect Effects 0.000 description 5
- 230000010363 phase shift Effects 0.000 description 5
- 230000000704 physical effect Effects 0.000 description 5
- 238000003672 processing method Methods 0.000 description 5
- 238000002601 radiography Methods 0.000 description 5
- 239000007779 soft material Substances 0.000 description 5
- 210000001562 sternum Anatomy 0.000 description 5
- 238000001356 surgical procedure Methods 0.000 description 5
- 210000000779 thoracic wall Anatomy 0.000 description 5
- 238000012384 transportation and delivery Methods 0.000 description 5
- 238000012795 verification Methods 0.000 description 5
- 238000010146 3D printing Methods 0.000 description 4
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 4
- BUGBHKTXTAQXES-UHFFFAOYSA-N Selenium Chemical compound [Se] BUGBHKTXTAQXES-UHFFFAOYSA-N 0.000 description 4
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 4
- 230000000747 cardiac effect Effects 0.000 description 4
- 210000001168 carotid artery common Anatomy 0.000 description 4
- 230000000295 complement effect Effects 0.000 description 4
- 150000001875 compounds Chemical class 0.000 description 4
- 238000002591 computed tomography Methods 0.000 description 4
- 229910052802 copper Inorganic materials 0.000 description 4
- 239000010949 copper Substances 0.000 description 4
- 230000006378 damage Effects 0.000 description 4
- 238000002059 diagnostic imaging Methods 0.000 description 4
- 238000007876 drug discovery Methods 0.000 description 4
- 238000002091 elastography Methods 0.000 description 4
- 238000000295 emission spectrum Methods 0.000 description 4
- 238000002594 fluoroscopy Methods 0.000 description 4
- 238000012804 iterative process Methods 0.000 description 4
- 230000007257 malfunction Effects 0.000 description 4
- 238000007726 management method Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 239000003550 marker Substances 0.000 description 4
- 238000010603 microCT Methods 0.000 description 4
- 210000000944 nerve tissue Anatomy 0.000 description 4
- 230000036961 partial effect Effects 0.000 description 4
- 244000052769 pathogen Species 0.000 description 4
- 238000013439 planning Methods 0.000 description 4
- 238000000513 principal component analysis Methods 0.000 description 4
- 238000004393 prognosis Methods 0.000 description 4
- 238000000926 separation method Methods 0.000 description 4
- 229910052710 silicon Inorganic materials 0.000 description 4
- 239000010703 silicon Substances 0.000 description 4
- 210000003625 skull Anatomy 0.000 description 4
- 238000012360 testing method Methods 0.000 description 4
- 230000009466 transformation Effects 0.000 description 4
- 241000282412 Homo Species 0.000 description 3
- 108091034117 Oligonucleotide Proteins 0.000 description 3
- 206010036618 Premenstrual syndrome Diseases 0.000 description 3
- HEMHJVSKTPXQMS-UHFFFAOYSA-M Sodium hydroxide Chemical compound [OH-].[Na+] HEMHJVSKTPXQMS-UHFFFAOYSA-M 0.000 description 3
- 238000004847 absorption spectroscopy Methods 0.000 description 3
- 238000000862 absorption spectrum Methods 0.000 description 3
- 229910021417 amorphous silicon Inorganic materials 0.000 description 3
- 238000013473 artificial intelligence Methods 0.000 description 3
- 238000013528 artificial neural network Methods 0.000 description 3
- 239000000090 biomarker Substances 0.000 description 3
- 230000037182 bone density Effects 0.000 description 3
- 210000004556 brain Anatomy 0.000 description 3
- 210000005252 bulbus oculi Anatomy 0.000 description 3
- 239000003795 chemical substances by application Substances 0.000 description 3
- 230000001427 coherent effect Effects 0.000 description 3
- 239000003086 colorant Substances 0.000 description 3
- 238000007796 conventional method Methods 0.000 description 3
- 239000013078 crystal Substances 0.000 description 3
- 230000001186 cumulative effect Effects 0.000 description 3
- 230000007547 defect Effects 0.000 description 3
- 238000000326 densiometry Methods 0.000 description 3
- 229940079593 drug Drugs 0.000 description 3
- 239000000975 dye Substances 0.000 description 3
- 238000002001 electrophysiology Methods 0.000 description 3
- 230000007831 electrophysiology Effects 0.000 description 3
- 230000005284 excitation Effects 0.000 description 3
- 239000000284 extract Substances 0.000 description 3
- 230000004438 eyesight Effects 0.000 description 3
- 239000006260 foam Substances 0.000 description 3
- 238000009472 formulation Methods 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 230000012010 growth Effects 0.000 description 3
- 210000003128 head Anatomy 0.000 description 3
- 238000000338 in vitro Methods 0.000 description 3
- 230000004941 influx Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000002452 interceptive effect Effects 0.000 description 3
- 238000011835 investigation Methods 0.000 description 3
- 229910052740 iodine Inorganic materials 0.000 description 3
- 238000002372 labelling Methods 0.000 description 3
- 210000002414 leg Anatomy 0.000 description 3
- 210000004072 lung Anatomy 0.000 description 3
- 150000002739 metals Chemical class 0.000 description 3
- 238000002610 neuroimaging Methods 0.000 description 3
- 238000003199 nucleic acid amplification method Methods 0.000 description 3
- 239000013307 optical fiber Substances 0.000 description 3
- 230000001717 pathogenic effect Effects 0.000 description 3
- 230000007170 pathology Effects 0.000 description 3
- 229920000642 polymer Polymers 0.000 description 3
- 238000012216 screening Methods 0.000 description 3
- 229910052711 selenium Inorganic materials 0.000 description 3
- 239000011669 selenium Substances 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 239000011780 sodium chloride Substances 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 210000000130 stem cell Anatomy 0.000 description 3
- 230000000638 stimulation Effects 0.000 description 3
- 230000008093 supporting effect Effects 0.000 description 3
- 229920002994 synthetic fiber Polymers 0.000 description 3
- 230000008685 targeting Effects 0.000 description 3
- 239000010409 thin film Substances 0.000 description 3
- 230000001988 toxicity Effects 0.000 description 3
- 231100000419 toxicity Toxicity 0.000 description 3
- 230000001960 triggered effect Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- ZCYVEMRRCGMTRW-UHFFFAOYSA-N 7553-56-2 Chemical compound [I] ZCYVEMRRCGMTRW-UHFFFAOYSA-N 0.000 description 2
- 102000009027 Albumins Human genes 0.000 description 2
- 108010088751 Albumins Proteins 0.000 description 2
- 208000010392 Bone Fractures Diseases 0.000 description 2
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 2
- 102000004190 Enzymes Human genes 0.000 description 2
- 108090000790 Enzymes Proteins 0.000 description 2
- VEXZGXHMUGYJMC-UHFFFAOYSA-N Hydrochloric acid Chemical compound Cl VEXZGXHMUGYJMC-UHFFFAOYSA-N 0.000 description 2
- 208000002682 Hyperkalemia Diseases 0.000 description 2
- 208000013038 Hypocalcemia Diseases 0.000 description 2
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 2
- 238000003559 RNA-seq method Methods 0.000 description 2
- 229910001370 Se alloy Inorganic materials 0.000 description 2
- QAOWNCQODCNURD-UHFFFAOYSA-N Sulfuric acid Chemical compound OS(O)(=O)=O QAOWNCQODCNURD-UHFFFAOYSA-N 0.000 description 2
- 238000005162 X-ray Laue diffraction Methods 0.000 description 2
- 238000000333 X-ray scattering Methods 0.000 description 2
- 239000006096 absorbing agent Substances 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 210000000577 adipose tissue Anatomy 0.000 description 2
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 230000004075 alteration Effects 0.000 description 2
- 230000003321 amplification Effects 0.000 description 2
- 239000000427 antigen Substances 0.000 description 2
- 102000036639 antigens Human genes 0.000 description 2
- 108091007433 antigens Proteins 0.000 description 2
- 238000013475 authorization Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 210000001124 body fluid Anatomy 0.000 description 2
- 239000010839 body fluid Substances 0.000 description 2
- 150000001768 cations Chemical class 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 239000002299 complementary DNA Substances 0.000 description 2
- 239000000306 component Substances 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 230000021615 conjugation Effects 0.000 description 2
- 238000002247 constant time method Methods 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 238000000151 deposition Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 238000010252 digital analysis Methods 0.000 description 2
- 238000012377 drug delivery Methods 0.000 description 2
- 238000003255 drug test Methods 0.000 description 2
- 230000002526 effect on cardiovascular system Effects 0.000 description 2
- 238000004993 emission spectroscopy Methods 0.000 description 2
- 239000003623 enhancer Substances 0.000 description 2
- 210000003743 erythrocyte Anatomy 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 210000001508 eye Anatomy 0.000 description 2
- 238000009615 fourier-transform spectroscopy Methods 0.000 description 2
- 210000005003 heart tissue Anatomy 0.000 description 2
- 230000000705 hypocalcaemia Effects 0.000 description 2
- 238000010191 image analysis Methods 0.000 description 2
- 238000002675 image-guided surgery Methods 0.000 description 2
- 238000001802 infusion Methods 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 238000005305 interferometry Methods 0.000 description 2
- 230000003834 intracellular effect Effects 0.000 description 2
- 239000011630 iodine Substances 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 2
- LFEUVBZXUFMACD-UHFFFAOYSA-H lead(2+);trioxido(oxo)-$l^{5}-arsane Chemical compound [Pb+2].[Pb+2].[Pb+2].[O-][As]([O-])([O-])=O.[O-][As]([O-])([O-])=O LFEUVBZXUFMACD-UHFFFAOYSA-H 0.000 description 2
- 150000002632 lipids Chemical class 0.000 description 2
- 239000002502 liposome Substances 0.000 description 2
- 229910001338 liquidmetal Inorganic materials 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 210000004088 microvessel Anatomy 0.000 description 2
- 238000002156 mixing Methods 0.000 description 2
- 230000003990 molecular pathway Effects 0.000 description 2
- 239000003068 molecular probe Substances 0.000 description 2
- 239000002071 nanotube Substances 0.000 description 2
- 108020004707 nucleic acids Proteins 0.000 description 2
- 102000039446 nucleic acids Human genes 0.000 description 2
- 150000007523 nucleic acids Chemical class 0.000 description 2
- 238000012014 optical coherence tomography Methods 0.000 description 2
- 230000037361 pathway Effects 0.000 description 2
- 230000010412 perfusion Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000035790 physiological processes and functions Effects 0.000 description 2
- 238000007639 printing Methods 0.000 description 2
- 230000001902 propagating effect Effects 0.000 description 2
- 230000001681 protective effect Effects 0.000 description 2
- 230000002685 pulmonary effect Effects 0.000 description 2
- 239000012925 reference material Substances 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 238000010845 search algorithm Methods 0.000 description 2
- 238000012163 sequencing technique Methods 0.000 description 2
- 238000007493 shaping process Methods 0.000 description 2
- 238000002099 shear wave elastography Methods 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 239000004332 silver Substances 0.000 description 2
- 238000012174 single-cell RNA sequencing Methods 0.000 description 2
- 238000002198 surface plasmon resonance spectroscopy Methods 0.000 description 2
- 238000003786 synthesis reaction Methods 0.000 description 2
- 238000001931 thermography Methods 0.000 description 2
- 230000008467 tissue growth Effects 0.000 description 2
- 235000021476 total parenteral nutrition Nutrition 0.000 description 2
- 238000000844 transformation Methods 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 230000004614 tumor growth Effects 0.000 description 2
- 238000010200 validation analysis Methods 0.000 description 2
- 238000004800 variational method Methods 0.000 description 2
- 230000002792 vascular Effects 0.000 description 2
- 210000005166 vasculature Anatomy 0.000 description 2
- 239000003981 vehicle Substances 0.000 description 2
- 210000001835 viscera Anatomy 0.000 description 2
- 230000009278 visceral effect Effects 0.000 description 2
- 239000008215 water for injection Substances 0.000 description 2
- NWONKYPBYAMBJT-UHFFFAOYSA-L zinc sulfate Chemical compound [Zn+2].[O-]S([O-])(=O)=O NWONKYPBYAMBJT-UHFFFAOYSA-L 0.000 description 2
- 150000003923 2,5-pyrrolediones Chemical class 0.000 description 1
- AOYNUTHNTBLRMT-SLPGGIOYSA-N 2-deoxy-2-fluoro-aldehydo-D-glucose Chemical compound OC[C@@H](O)[C@@H](O)[C@H](O)[C@@H](F)C=O AOYNUTHNTBLRMT-SLPGGIOYSA-N 0.000 description 1
- 101100290342 Arabidopsis thaliana MBR2 gene Proteins 0.000 description 1
- 208000006386 Bone Resorption Diseases 0.000 description 1
- 208000020084 Bone disease Diseases 0.000 description 1
- 230000005461 Bremsstrahlung Effects 0.000 description 1
- 229940127291 Calcium channel antagonist Drugs 0.000 description 1
- BVKZGUZCCUSVTD-UHFFFAOYSA-L Carbonate Chemical compound [O-]C([O-])=O BVKZGUZCCUSVTD-UHFFFAOYSA-L 0.000 description 1
- 206010048610 Cardiotoxicity Diseases 0.000 description 1
- 102000014914 Carrier Proteins Human genes 0.000 description 1
- 229910004611 CdZnTe Inorganic materials 0.000 description 1
- VEXZGXHMUGYJMC-UHFFFAOYSA-M Chloride anion Chemical compound [Cl-] VEXZGXHMUGYJMC-UHFFFAOYSA-M 0.000 description 1
- 241000272194 Ciconiiformes Species 0.000 description 1
- 102000003886 Glycoproteins Human genes 0.000 description 1
- 108090000288 Glycoproteins Proteins 0.000 description 1
- 208000010496 Heart Arrest Diseases 0.000 description 1
- 206010020669 Hypermagnesaemia Diseases 0.000 description 1
- 206010020844 Hyperthermia malignant Diseases 0.000 description 1
- 201000009794 Idiopathic Pulmonary Fibrosis Diseases 0.000 description 1
- 229920005479 Lucite® Polymers 0.000 description 1
- 208000019693 Lung disease Diseases 0.000 description 1
- 101150070175 MBR1 gene Proteins 0.000 description 1
- 239000002616 MRI contrast agent Substances 0.000 description 1
- 208000018717 Malignant hyperthermia of anesthesia Diseases 0.000 description 1
- 102000007474 Multiprotein Complexes Human genes 0.000 description 1
- 108010085220 Multiprotein Complexes Proteins 0.000 description 1
- 241000699670 Mus sp. Species 0.000 description 1
- 206010029113 Neovascularisation Diseases 0.000 description 1
- 208000001132 Osteoporosis Diseases 0.000 description 1
- 238000012879 PET imaging Methods 0.000 description 1
- 206010035148 Plague Diseases 0.000 description 1
- 238000001069 Raman spectroscopy Methods 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 102000011990 Sirtuin Human genes 0.000 description 1
- 108050002485 Sirtuin Proteins 0.000 description 1
- 208000002847 Surgical Wound Diseases 0.000 description 1
- 208000030886 Traumatic Brain injury Diseases 0.000 description 1
- 101100204286 Ustilago maydis (strain 521 / FGSC 9021) ust1 gene Proteins 0.000 description 1
- 238000002056 X-ray absorption spectroscopy Methods 0.000 description 1
- 241000607479 Yersinia pestis Species 0.000 description 1
- ZLSSXLNNHMPGJW-UHFFFAOYSA-N [1-hydroxy-4-[methyl(pentyl)amino]-1-phosphonobutyl]phosphonic acid Chemical compound CCCCCN(C)CCCC(O)(P(O)(O)=O)P(O)(O)=O ZLSSXLNNHMPGJW-UHFFFAOYSA-N 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000002745 absorbent Effects 0.000 description 1
- 239000002250 absorbent Substances 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000002776 aggregation Effects 0.000 description 1
- 238000004220 aggregation Methods 0.000 description 1
- 239000004411 aluminium Substances 0.000 description 1
- 150000001413 amino acids Chemical class 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 238000004873 anchoring Methods 0.000 description 1
- 230000033115 angiogenesis Effects 0.000 description 1
- 238000002583 angiography Methods 0.000 description 1
- 230000002547 anomalous effect Effects 0.000 description 1
- 230000009118 appropriate response Effects 0.000 description 1
- 230000004872 arterial blood pressure Effects 0.000 description 1
- 210000001367 artery Anatomy 0.000 description 1
- 230000002917 arthritic effect Effects 0.000 description 1
- 238000003556 assay Methods 0.000 description 1
- 230000003416 augmentation Effects 0.000 description 1
- 238000003705 background correction Methods 0.000 description 1
- 230000001580 bacterial effect Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 238000007630 basic procedure Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 229910052790 beryllium Inorganic materials 0.000 description 1
- ATBAMAFKBVZNFJ-UHFFFAOYSA-N beryllium atom Chemical compound [Be] ATBAMAFKBVZNFJ-UHFFFAOYSA-N 0.000 description 1
- 108091008324 binding proteins Proteins 0.000 description 1
- 230000008033 biological extinction Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000008499 blood brain barrier function Effects 0.000 description 1
- 210000001218 blood-brain barrier Anatomy 0.000 description 1
- 230000024279 bone resorption Effects 0.000 description 1
- 239000005388 borosilicate glass Substances 0.000 description 1
- 210000000481 breast Anatomy 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 239000004566 building material Substances 0.000 description 1
- 239000000480 calcium channel blocker Substances 0.000 description 1
- LLSDKQJKOVVTOJ-UHFFFAOYSA-L calcium chloride dihydrate Chemical compound O.O.[Cl-].[Cl-].[Ca+2] LLSDKQJKOVVTOJ-UHFFFAOYSA-L 0.000 description 1
- 229940052299 calcium chloride dihydrate Drugs 0.000 description 1
- 159000000007 calcium salts Chemical class 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 238000013184 cardiac magnetic resonance imaging Methods 0.000 description 1
- 231100000259 cardiotoxicity Toxicity 0.000 description 1
- 238000013153 catheter ablation Methods 0.000 description 1
- 230000010261 cell growth Effects 0.000 description 1
- 230000010267 cellular communication Effects 0.000 description 1
- 230000008614 cellular interaction Effects 0.000 description 1
- 239000013522 chelant Substances 0.000 description 1
- 210000000038 chest Anatomy 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 230000001447 compensatory effect Effects 0.000 description 1
- 239000011365 complex material Substances 0.000 description 1
- 238000000205 computational method Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000009548 contrast radiography Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 208000031513 cyst Diseases 0.000 description 1
- 238000011157 data evaluation Methods 0.000 description 1
- 238000013523 data management Methods 0.000 description 1
- 238000007418 data mining Methods 0.000 description 1
- 238000013499 data model Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000007850 degeneration Effects 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 239000000032 diagnostic agent Substances 0.000 description 1
- 229940039227 diagnostic agent Drugs 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 238000004141 dimensional analysis Methods 0.000 description 1
- 238000000375 direct analysis in real time Methods 0.000 description 1
- 230000009365 direct transmission Effects 0.000 description 1
- BFMYDTVEBKDAKJ-UHFFFAOYSA-L disodium;(2',7'-dibromo-3',6'-dioxido-3-oxospiro[2-benzofuran-1,9'-xanthene]-4'-yl)mercury;hydrate Chemical compound O.[Na+].[Na+].O1C(=O)C2=CC=CC=C2C21C1=CC(Br)=C([O-])C([Hg])=C1OC1=C2C=C(Br)C([O-])=C1 BFMYDTVEBKDAKJ-UHFFFAOYSA-L 0.000 description 1
- 208000035475 disorder Diseases 0.000 description 1
- 238000002224 dissection Methods 0.000 description 1
- 150000002019 disulfides Chemical class 0.000 description 1
- 238000009509 drug development Methods 0.000 description 1
- 238000012063 dual-affinity re-targeting Methods 0.000 description 1
- 238000002848 electrochemical method Methods 0.000 description 1
- 230000005672 electromagnetic field Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000007850 fluorescent dye Substances 0.000 description 1
- 238000012632 fluorescent imaging Methods 0.000 description 1
- 125000001153 fluoro group Chemical group F* 0.000 description 1
- 239000012634 fragment Substances 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 229910052733 gallium Inorganic materials 0.000 description 1
- 230000002068 genetic effect Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 229910021389 graphene Inorganic materials 0.000 description 1
- 210000004884 grey matter Anatomy 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 231100001261 hazardous Toxicity 0.000 description 1
- 230000011731 head segmentation Effects 0.000 description 1
- 238000009532 heart rate measurement Methods 0.000 description 1
- 238000009396 hybridization Methods 0.000 description 1
- XMBWDFGMSWQBCA-UHFFFAOYSA-N hydrogen iodide Chemical compound I XMBWDFGMSWQBCA-UHFFFAOYSA-N 0.000 description 1
- 238000003706 image smoothing Methods 0.000 description 1
- 210000000987 immune system Anatomy 0.000 description 1
- 229940127121 immunoconjugate Drugs 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000012623 in vivo measurement Methods 0.000 description 1
- 238000010348 incorporation Methods 0.000 description 1
- 229910052738 indium Inorganic materials 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 208000036971 interstitial lung disease 2 Diseases 0.000 description 1
- 238000001990 intravenous administration Methods 0.000 description 1
- 238000010253 intravenous injection Methods 0.000 description 1
- PNDPGZBMCMUPRI-UHFFFAOYSA-N iodine Chemical compound II PNDPGZBMCMUPRI-UHFFFAOYSA-N 0.000 description 1
- DGAIEPBNLOQYER-UHFFFAOYSA-N iopromide Chemical compound COCC(=O)NC1=C(I)C(C(=O)NCC(O)CO)=C(I)C(C(=O)N(C)CC(O)CO)=C1I DGAIEPBNLOQYER-UHFFFAOYSA-N 0.000 description 1
- 229960002603 iopromide Drugs 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 229910052743 krypton Inorganic materials 0.000 description 1
- 238000002032 lab-on-a-chip Methods 0.000 description 1
- 238000010330 laser marking Methods 0.000 description 1
- 238000001001 laser micro-dissection Methods 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 210000000265 leukocyte Anatomy 0.000 description 1
- 239000003446 ligand Substances 0.000 description 1
- 210000004185 liver Anatomy 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 231100000053 low toxicity Toxicity 0.000 description 1
- 229910052749 magnesium Inorganic materials 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 230000036210 malignancy Effects 0.000 description 1
- 201000007004 malignant hyperthermia Diseases 0.000 description 1
- 229910052748 manganese Inorganic materials 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000004949 mass spectrometry Methods 0.000 description 1
- 238000012067 mathematical method Methods 0.000 description 1
- 230000001404 mediated effect Effects 0.000 description 1
- 229940127554 medical product Drugs 0.000 description 1
- 230000001394 metastastic effect Effects 0.000 description 1
- 206010061289 metastatic neoplasm Diseases 0.000 description 1
- 230000005012 migration Effects 0.000 description 1
- 238000013508 migration Methods 0.000 description 1
- 235000010755 mineral Nutrition 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 231100000324 minimal toxicity Toxicity 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 238000007479 molecular analysis Methods 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
- 230000008450 motivation Effects 0.000 description 1
- 230000007659 motor function Effects 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 239000002090 nanochannel Substances 0.000 description 1
- 239000002086 nanomaterial Substances 0.000 description 1
- 239000002070 nanowire Substances 0.000 description 1
- 230000001537 neural effect Effects 0.000 description 1
- 210000002569 neuron Anatomy 0.000 description 1
- 239000002858 neurotransmitter agent Substances 0.000 description 1
- 230000004297 night vision Effects 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 230000009022 nonlinear effect Effects 0.000 description 1
- 238000012633 nuclear imaging Methods 0.000 description 1
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 description 1
- 238000009206 nuclear medicine Methods 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
- 239000000382 optic material Substances 0.000 description 1
- 238000013386 optimize process Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 201000008482 osteoarthritis Diseases 0.000 description 1
- 150000002923 oximes Chemical class 0.000 description 1
- 230000009543 pathological alteration Effects 0.000 description 1
- 230000036285 pathological change Effects 0.000 description 1
- 231100000915 pathological change Toxicity 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 230000003094 perturbing effect Effects 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 239000004926 polymethyl methacrylate Substances 0.000 description 1
- 238000002600 positron emission tomography Methods 0.000 description 1
- 239000003755 preservative agent Substances 0.000 description 1
- 238000002203 pretreatment Methods 0.000 description 1
- 230000003449 preventive effect Effects 0.000 description 1
- 239000011164 primary particle Substances 0.000 description 1
- 238000012913 prioritisation Methods 0.000 description 1
- 108090000765 processed proteins & peptides Proteins 0.000 description 1
- 102000004196 processed proteins & peptides Human genes 0.000 description 1
- 239000011241 protective layer Substances 0.000 description 1
- 230000000541 pulsatile effect Effects 0.000 description 1
- 238000012372 quality testing Methods 0.000 description 1
- 239000002096 quantum dot Substances 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 150000003254 radicals Chemical class 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000013558 reference substance Substances 0.000 description 1
- 238000007670 refining Methods 0.000 description 1
- 238000009419 refurbishment Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000005067 remediation Methods 0.000 description 1
- 210000005084 renal tissue Anatomy 0.000 description 1
- 238000009877 rendering Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 231100000205 reproductive and developmental toxicity Toxicity 0.000 description 1
- 230000000241 respiratory effect Effects 0.000 description 1
- 238000002432 robotic surgery Methods 0.000 description 1
- 229910052701 rubidium Inorganic materials 0.000 description 1
- IGLNJRXAVVLDKE-UHFFFAOYSA-N rubidium atom Chemical compound [Rb] IGLNJRXAVVLDKE-UHFFFAOYSA-N 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000000790 scattering method Methods 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 238000004557 single molecule detection Methods 0.000 description 1
- 238000004513 sizing Methods 0.000 description 1
- 230000007958 sleep Effects 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 210000000952 spleen Anatomy 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 238000010561 standard procedure Methods 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
- 230000004936 stimulating effect Effects 0.000 description 1
- 238000011410 subtraction method Methods 0.000 description 1
- 230000005469 synchrotron radiation Effects 0.000 description 1
- 239000003826 tablet Substances 0.000 description 1
- 239000013077 target material Substances 0.000 description 1
- 229910052713 technetium Inorganic materials 0.000 description 1
- PGAPATLGJSQQBU-UHFFFAOYSA-M thallium(i) bromide Chemical compound [Tl]Br PGAPATLGJSQQBU-UHFFFAOYSA-M 0.000 description 1
- 229940124597 therapeutic agent Drugs 0.000 description 1
- 210000000115 thoracic cavity Anatomy 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 238000013518 transcription Methods 0.000 description 1
- 230000035897 transcription Effects 0.000 description 1
- 238000002834 transmittance Methods 0.000 description 1
- 238000013024 troubleshooting Methods 0.000 description 1
- 210000004881 tumor cell Anatomy 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
- 230000002861 ventricular Effects 0.000 description 1
- 230000003612 virological effect Effects 0.000 description 1
- 239000011800 void material Substances 0.000 description 1
- 238000001262 western blot Methods 0.000 description 1
- 210000004885 white matter Anatomy 0.000 description 1
- 229910052727 yttrium Inorganic materials 0.000 description 1
- 229960001763 zinc sulfate Drugs 0.000 description 1
- 229910000368 zinc sulfate Inorganic materials 0.000 description 1
Images





















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/027—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis characterised by the use of a particular data acquisition trajectory, e.g. helical or spiral
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/06—Diaphragms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/40—Arrangements for generating radiation specially adapted for radiation diagnosis
- A61B6/4007—Arrangements for generating radiation specially adapted for radiation diagnosis characterised by using a plurality of source units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/40—Arrangements for generating radiation specially adapted for radiation diagnosis
- A61B6/4021—Arrangements for generating radiation specially adapted for radiation diagnosis involving movement of the focal spot
- A61B6/4028—Arrangements for generating radiation specially adapted for radiation diagnosis involving movement of the focal spot resulting in acquisition of views from substantially different positions, e.g. EBCT
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/42—Arrangements for detecting radiation specially adapted for radiation diagnosis
- A61B6/4208—Arrangements for detecting radiation specially adapted for radiation diagnosis characterised by using a particular type of detector
- A61B6/4241—Arrangements for detecting radiation specially adapted for radiation diagnosis characterised by using a particular type of detector using energy resolving detectors, e.g. photon counting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/42—Arrangements for detecting radiation specially adapted for radiation diagnosis
- A61B6/4266—Arrangements for detecting radiation specially adapted for radiation diagnosis characterised by using a plurality of detector units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/482—Diagnostic techniques involving multiple energy imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/484—Diagnostic techniques involving phase contrast X-ray imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5205—Devices using data or image processing specially adapted for radiation diagnosis involving processing of raw data to produce diagnostic data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5258—Devices using data or image processing specially adapted for radiation diagnosis involving detection or reduction of artifacts or noise
- A61B6/5282—Devices using data or image processing specially adapted for radiation diagnosis involving detection or reduction of artifacts or noise due to scatter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/542—Control of apparatus or devices for radiation diagnosis involving control of exposure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/542—Control of apparatus or devices for radiation diagnosis involving control of exposure
- A61B6/544—Control of apparatus or devices for radiation diagnosis involving control of exposure dependent on patient size
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/40—Arrangements for generating radiation specially adapted for radiation diagnosis
- A61B6/4007—Arrangements for generating radiation specially adapted for radiation diagnosis characterised by using a plurality of source units
- A61B6/4014—Arrangements for generating radiation specially adapted for radiation diagnosis characterised by using a plurality of source units arranged in multiple source-detector units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Pulmonology (AREA)
- Theoretical Computer Science (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Abstract
X線システムおよび方法は、CTなどの従来のイメージング技術と比較して、撮影速度の向上および/または放射線量の低減を実現することができる。本システムは、対象内の関心体積を特定することができる。システムは、散乱除去アルゴリズム及び/又はビーム選択デバイスを含むことができる。イメージ化された対象の材料分解は、エネルギー応答関数方程式系を解くために反復され得るデュアルエネルギー分解法に基づくことが可能である。
Description
[優先権基礎出願の参照による組み込み]
2019年11月26日に出願された米国仮特許出願第62/940,682号、2019年11月28日に出願された米国仮特許出願第62/941,728号、2019年12月15日に出願された米国仮特許出願第62/948,290号、2019年12月20日に出願された米国仮特許出願第62/951,458号、2019年12月29日に出願された米国仮特許出願第62/954,508号、2020年1月18日に出願された米国仮特許出願第62/962,959号、2020年2月26日に出願された米国仮特許出願第62/981,545号、2020年3月17日に出願された米国仮特許出願第62/990,449号、2020年3月24日に出願された米国仮特許出願第62/993,726号、2020年3月26日に出願された米国仮特許出願第62/994,869号、2020年5月1日に出願された米国仮特許出願第63/019,214号、2020年5月19日に出願された米国仮特許出願第63/026,741号、2020年5月28日に出願された米国仮特許出願第63/031,573号、2020年6月17日に出願された米国仮特許出願第63/040,003号、2020年6月22日に出願された米国仮特許出願第63/042,013号、2020年7月1日に出願された米国仮特許出願第63/046,712号、2020年7月10日に出願された米国仮特許出願第63/050,122号、2020年8月11日に出願された米国仮特許出願第63/063,976号、2020年8月15日に出願された米国仮特許出願第63/066,170号、2020年9月3日に出願された米国仮特許出願第63/073,945号、2020年9月10日に出願された米国仮特許出願第63/076,914号、2020年9月14日に出願された米国仮特許出願第63/078,004号、2020年9月16日に出願された米国仮特許出願第63/078,946号、2020年9月22日に出願された米国および米国仮特許出願第63/081,344号、2020年9月28日に出願された米国および米国仮特許出願第63/084,019号、2020年10月4日に出願された米国仮特許出願第63/087,227号、2020年10月3日に出願された米国仮特許出願第.63/087,185号、2020年10月19日に出願された米国仮特許出願第63/093,320号、2020年10月27日に出願された米国仮特許出願第63/105,912号、2020年10月29日に出願された米国仮特許出願第63/106,908号、2020年10月30日に出願された米国仮特許出願第63/107,462号、2020年10月31日に出願された米国仮特許出願第63/108,291号、2020年11月7日に出願された米国仮特許出願第63/110,986号、2020年11月13日に出願された米国仮特許出願第63/113,258号、を参照することにより、これらの各々の開示全体は本出願に組み込まれ、本明細書の一部となるものとする。
2019年11月26日に出願された米国仮特許出願第62/940,682号、2019年11月28日に出願された米国仮特許出願第62/941,728号、2019年12月15日に出願された米国仮特許出願第62/948,290号、2019年12月20日に出願された米国仮特許出願第62/951,458号、2019年12月29日に出願された米国仮特許出願第62/954,508号、2020年1月18日に出願された米国仮特許出願第62/962,959号、2020年2月26日に出願された米国仮特許出願第62/981,545号、2020年3月17日に出願された米国仮特許出願第62/990,449号、2020年3月24日に出願された米国仮特許出願第62/993,726号、2020年3月26日に出願された米国仮特許出願第62/994,869号、2020年5月1日に出願された米国仮特許出願第63/019,214号、2020年5月19日に出願された米国仮特許出願第63/026,741号、2020年5月28日に出願された米国仮特許出願第63/031,573号、2020年6月17日に出願された米国仮特許出願第63/040,003号、2020年6月22日に出願された米国仮特許出願第63/042,013号、2020年7月1日に出願された米国仮特許出願第63/046,712号、2020年7月10日に出願された米国仮特許出願第63/050,122号、2020年8月11日に出願された米国仮特許出願第63/063,976号、2020年8月15日に出願された米国仮特許出願第63/066,170号、2020年9月3日に出願された米国仮特許出願第63/073,945号、2020年9月10日に出願された米国仮特許出願第63/076,914号、2020年9月14日に出願された米国仮特許出願第63/078,004号、2020年9月16日に出願された米国仮特許出願第63/078,946号、2020年9月22日に出願された米国および米国仮特許出願第63/081,344号、2020年9月28日に出願された米国および米国仮特許出願第63/084,019号、2020年10月4日に出願された米国仮特許出願第63/087,227号、2020年10月3日に出願された米国仮特許出願第.63/087,185号、2020年10月19日に出願された米国仮特許出願第63/093,320号、2020年10月27日に出願された米国仮特許出願第63/105,912号、2020年10月29日に出願された米国仮特許出願第63/106,908号、2020年10月30日に出願された米国仮特許出願第63/107,462号、2020年10月31日に出願された米国仮特許出願第63/108,291号、2020年11月7日に出願された米国仮特許出願第63/110,986号、2020年11月13日に出願された米国仮特許出願第63/113,258号、を参照することにより、これらの各々の開示全体は本出願に組み込まれ、本明細書の一部となるものとする。
本願は、診断、モニタリング、監視、イメージガイダンス、医療における特定や特性評価、創薬やライフサイエンス研究、非破壊検査(NDT)、フィールド検査、鉱物の特性評価、セキュリティなどのためのX線イメージシステムおよび関連技術に関連するものである。
CTイメージは、人体の異なる組織のような重なり合った物質に埋もれた情報をよりよく解剖することを可能にする。現在、重なり合った組織に埋もれた情報を解剖するためには、CTイメージが必要となることが多い。
しかし、CTの放射線は安全性に問題があり、一般に頻繁な監視・モニタリングには日常的に使用されていない。
従来のCTスキャナは、嵩が大きく複雑であるばかりでなく、運搬が困難であり、患者および医師が利用し難いという空間的な制約がある。CTは、撮影方法の種類に関して柔軟性に欠け、ハードウェア能力を拡張して一般に利用できないという点で閉鎖的なシステムである。
CT再構成法は一般に時間がかかり、イメージ取得中の散乱、ビームハードニング及びその複雑なロボット運動の要求により、大規模なアーチファクト補正及び動き補正が必要である。
CTを購入し、支払いを行うことは、高価な資本装置であるため、時間がかかり、困難な処理である。施設がCT装置を取得し、維持するために必要な時間と労力は、決して小さな事業ではない。
散乱除去技術により達成可能な散乱対一次比率(SPR)1%未満または5%未満でスペクトルイメージングと組み合わせた断層撮影イメージングは、フラットパネル検出器又は2D検出器及び関連する自動化アセンブリ及びソフトウェア方法(以前はCTによってのみ達成可能であった診断及び監視及び追跡アプリケーションのための自動化アセンブリ及びソフトウェア方法)を使用する改良されたX線イメージングおよび断層撮影を可能にする。
例えば、点、1D、2D、3D、6Dまたは6Dおよび時間(「7D」と呼ばれることもある)のスペクトルイメージングまたは断層撮影測定によって提供されるデータでは、感度、解像度、「関心体積」(Volume Of Interest)および関心領域(region of interest)「ROI」の空間位置、データの種類およびデータの完全性に対する要件が、特定のアプリケーションによって要求される結果を提供するために、異なる場合がある。
X線イメージングに適した診断及び介入処置及び他の用途における各イメージング・シナリオによる無数の多様な要求のために、ユーザーが各用途に対してリアルタイムでシステム構成を微調整すること及び/又は各サンプル又は患者に対してイメージング方法をカスタマイズして高速、改善、十分に正確かつ精密な結果を達成すると同時にイメージング手続きに要するX線照射及び時間を制限できるX線測定システム及び方法を有することが望まれる。
例えば、外科的追跡では、点、1D、2D、または3Dの低解像度スペクトルX線測定で十分である場合がある。一方、癌診断では、限られたVOIにおける非常に高い解像度の断層撮影イメージが望まれるかもしれない。介入処置における別の例では、選択されたVOI及びVOI内部のコンポーネントの低解像度断層撮影イメージングの高速測定及び/又は2Dのスペクトルイメージングを組み合わせることによる追跡及び監視は、時間、空間及び周波数領域において、インプラント配置及び又は最小侵襲手術に必要なレベルの精度でコンポーネントを正確に特徴付けることができる。
本開示において、各特定アプリケーション及びイメージング条件について、ハードウェア及びソフトウェアの選択、及び/又はX線管、検出器、X線オプティクス、光学測定オプティクス及び/又はロボティックスの空間位置は、典型的X線イメージングシステム、例えば、1つのX線管及び1つの検出器ペアを有する一般的なX線イメージングシステム、又はCT若しくはデンシトメータ、又はトモシンセシスシステム若しくはCアーム若しくはUアーム又はOリングX線が許容するものと、異なる構成であるかもしれない。
特定のVOIについての2D又は3Dの可変解像度及び/又は定量的スペクトルイメージングを達成するために、例えば、X線源が試料及び/又は検出器に対して同じ空間位置から放出することが望まれる場合がある。しかしながら、現在、1つの線源又は1つの検出器は、正確なスペクトルイメージング又は断層撮影測定に必要なエネルギーレベル、解像度又は速度を提供することができない可能性がある。
本開示は、従来のCTと比較して形状及び重量を低減しつつ、様々なアプリケーションのための多様なイメージングニーズ及び要求に対応する柔軟な動的システム構成を可能にし、それによってポイント・オブ・ケアでの携帯性及びアクセス性を可能にする。
点乃至7DのX線イメージングシステム、又は3Dリアルタイム透視システムは、イメージング能力を更に拡張するために、多数のソフトウェアイメージ処理能力及び/又はハードウェアコンポーネント、例えばX線オプティクス、変調モジュール、光学部品、X線源、検出器、コリメータ、ビーム粒子ストッパープレート、ビームセレクタ、フィルタ、グレーチングシステム、ビームスプリッタ、チョッパー、種々の移動体、ビーム操向装置等、を含んでもよい。
各ハードウェア要素は、各アプリケーションに対する異なる要求の性質に応じて異なる方法でX線ビームを操作するために、マイクロプロセッサ上のソフトウェア制御によって、またはユーザーによって必要に応じて駆動されて、ハードウェア装置の1つまたは複数の他の要素と独立してまたは同期して1つまたは複数の移動機構によってX線照射経路に出し入れされてもよい。場合によっては、このようなスペクトルX線断層撮影装置は、別のX線2Dまたは3Dイメージング装置および/または試料保持装置の一部ユニットまたは完全ユニットと組み合わせて、特定のアプリケーションに必要なイメージング能力および分析能力を拡張することができる。
場合によっては、異なる時間で同じX線放出位置にある、及び/又は様々なX線放出位置にある、1つ又は複数のX線源が使用されることがある。
空間又は周波数領域における可変のX線減衰及び干渉特性は、サンプルを照会して診断又は追跡に必要な追加情報を明らかにするために、測定されてもよい。
様々なX線源若しくは検出器又はX線オプティクス又は光学部品は、2D又は3Dフォーマットでの正確なX線スペクトルイメージングを可能にする。様々なX線源若しくは検出器又はX線オプティクス又は光学部品は、X線システム動作手順のためのイメージングモードを可能にし、又はイメージ表示の数の柔軟性および最適化を可能にするために、異なるシステム及び/又は空間構成でX線ビームを生成するために使用されるX線ビーム又は電子ビームの操作を可能にする。
選択されたROIに対する多様なイメージング要件の要求に対応できるX線多次元イメージングまたはスペクトルイメージングまたは断層撮影システムは、以下に説明するような柔軟性の余地を有している。
VOIは、例えば、X線ビームサイズが対象上のROIを十分に照射するようにX線源から来てコリメータ又はMADフィルタによって平行化されたX線によって、選択可能なROIの投影イメージに対応する検出器上の領域によってイメージ化されることができる。ROIは、検出器のROIと呼ばれる検出器上の領域によって空間的に測定されるように選択されることができる。検出器のそのようなROIは、例えば、サイズ調整された又は制限された又は選択されたビームサイズ、又はビームの位置によるX線源FOVの事前の較正によって、イメージングプロセスの前又は間に決定され得る。
例えば、移動体(手動又は自動、例えば機械的)は、X線コーンビーム中心軸がVOIの最適化されたイメージング角度のために適切に整列される位置にX線源を移動させることができる。
移動体はまた、VOIの投影イメージを収集するために1つ又は複数の検出器を独立して又は同期的に移動させてもよい。同一の移動体が、光源及び検出器のペアの両方を移動させてもよい。光源及び/又は検出器は、物体内の他のVOIを照射してイメージ化するために、1つ又は複数の移動体によって移動されてもよい。
X線コーンビームサイズは、X線源から下流に位置するコリメータシャッターを制御するユーザー又はデジタルプログラムによって選択されてもよい。ROIを通過して検出器に到達するX線信号のみを収集する検出器の領域が、測定および/または処理対象として選択され得る。なぜなら検出器上のROIを囲む領域は、異なる測定値または信号レベルを有する可能性があるためである。また、この相関関係は、検出器に対するX線源の空間位置に基づいて数学的に決定されてもよい。検出器のROIは、例えば、選択的に正規化されるように、また、X線放出ビームサイズ及び/又はビーム位置が調整されるように、イメージング速度を最適化するよう調整されてもよい。
一方、全身イメージングの場合のように、大きなVOIが必要とされることもある。2つまたはそれ以上の検出器及びそれらに対応するX線源(複数可)が使用されてもよいし、及び/又は、より大きなFOVをイメージ化するために、より多くのROIを照射しイメージ化するために線源及び検出器のペアが移動されてもよい。複数の線源又はX線放出位置は、一緒に使用可能であり、断層撮影再構成に必要なイメージ取得及びデータ取得の速度を上げるために、1つのVOIをイメージ化する際に同期的又は非同期的に移動されることもある。
2つまたはそれ以上のVOIがX線ビームによって照射されてもよく、それらの投影は、X線照射経路において検出器または別の検出器にわたって分布していてもよいし検出器の異なる領域によって収集されてもよい。検出器は、X線測定を順次及び/又は同時に収集してもよい。イメージ測定及び処理は、異なるROIが決定された後に複数のROIを選択的に測定することによって最適化可能であり、これは、場合によっては、検出器上のROIの外側の領域を省略することを伴うことができる。
<干渉除去及びより良い可視化>
複数のエネルギー機構又はシングルエネルギー物質分解法によって分離されたX線イメージの画像提示は、3D CTシステムのイメージ取得後のイメージ処理によって達成されてもよい。イメージ再構成はまた、X線測定又はイメージが取得されている間に行われてもよい。イメージ再構成は、既に取得されたイメージの分析に基づいて優先順位付けされ、カスタマイズされてもよい。イメージのいくつかが、表示のために処理される最終提示イメージを再構成するために結合されるとき、いくつかの場合において、異なる材料又はコンポーネントは、異なる色で、及び/又は強度あるいはダイナミックレンジを調整することによって、視覚提示を強化し、互いの(及び背景に対する)動的コンポーネントの動き及び分布を例示することができる。
複数のエネルギー機構又はシングルエネルギー物質分解法によって分離されたX線イメージの画像提示は、3D CTシステムのイメージ取得後のイメージ処理によって達成されてもよい。イメージ再構成はまた、X線測定又はイメージが取得されている間に行われてもよい。イメージ再構成は、既に取得されたイメージの分析に基づいて優先順位付けされ、カスタマイズされてもよい。イメージのいくつかが、表示のために処理される最終提示イメージを再構成するために結合されるとき、いくつかの場合において、異なる材料又はコンポーネントは、異なる色で、及び/又は強度あるいはダイナミックレンジを調整することによって、視覚提示を強化し、互いの(及び背景に対する)動的コンポーネントの動き及び分布を例示することができる。
<高スループットシステム>
本開示は、同じ物体内のROI又は2つ以上の物体内のROIの2D及び/又は3Dスペクトル測定を同じ時間又は異なる時間に行うことができるシステムを含む高スループットX線システムを含む。
本開示は、同じ物体内のROI又は2つ以上の物体内のROIの2D及び/又は3Dスペクトル測定を同じ時間又は異なる時間に行うことができるシステムを含む高スループットX線システムを含む。
ヒトまたは動物、生体内または生体外および生体外サンプルのX線イメージングの場合、一般に、1つの試料ホルダーまたはテーブル上に置かれたただ1つのサンプルと、1つまたは2つのX線源と、その線源に対応する1つまたは2つの検出器がある。小動物のイメージングや非破壊検査(NDT)の場合、一度にイメージングできる試料の数に制限がある。一般に、従来のCTの回転設計により、FOV、サンプルサイズ、イメージされるサンプル数が制限されることになる。
高解像度のスペクトルおよび空間領域の2Dイメージングと非回転断層撮影を可能にする本開示は、アクセス性とFOVにより、従来のCTよりも多くの試料を同時にイメージングすることが可能になる。
本明細書に開示されるX線システム及び方法は、例えば、現在の従来のCTシステムよりも大きな達成可能なFOVで、時には動いているか又は静止している可能性がある2つ以上の生きた物体を撮影する場合に使用され得る。
本明細書に開示されるX線システム及び方法は、従来のCTスキャナで行うことができるよりも、2つ以上の生きた静止又は移動物体を診断、監視及び追跡するために、より自然な環境でのイメージングの場合にも使用することができる。例えば、これらの物体は、動物取扱施設又は収容施設内のケージ又は他の区域で移動する2匹のマウスであり得る。
各物体内の1つ又は複数のVOI又はVOI内の1つ又は複数のコンポーネントの空間的位置及び/又は向きが、同時に監視されてもよい。
X線断層撮影及び/又はスペクトルイメージングは、カメラ及び/又はAI機能と組み合わせて、動作を追跡し、動作特性を特定し、1つ又は複数の物体においてX線イメージングを用いて1つ又は複数のVOIを同時にイメージ化してもよい。物体は、動いていてもよく、静止していなくてもよい。
創薬、診断、ライフサイエンス研究、情報通信技術(ICT)生産における品質検査や故障解析、セキュリティ用途では、解析や事実確認のためのデータ収集に、多くの異なるサンプルの高速データ取得が不可欠である。
場合によっては、1つまたは複数のX線システムを備えた複数のX線システムが、同じ種類の異なるサンプルに対して、または異なるサンプルに対して、同時に実行されることがある。例えば、マイクロ流体チップ上の3D組織研究において、又は小動物又は生体外の動物組織の薬物試験又はリード・スクリーニングにおいて、又はデジタル病理学においてであり、例えば異なる患者スキャンが実行される多重組織又はサンプルの同時スクリーニングである。
いくつかの場合において、検出器は、X線、UVまたは近赤外線(NIR)のような光信号を同時にまたは実質的に同時に測定することが可能であってよい。すべての測定に同じピクセルが使用されてもよい。同じ検出器の異なるピクセル又は異なる検出器が、異なるモダリティの測定に使用されてもよい。
<ROIの特定>
従来のCTシステムでは、一般に、VOIの内部に埋め込まれたコンポーネントの空間位置及び又は向きを得るために、ROI全体又は対象をイメージングして3Dイメージを再構成することが必要である。本開示は、解像度、速度、FOV、測定の種類、スペクトル撮像の観点からVOI及びコンポーネントのX線測定を調整し、結果を最適化すると同時に放射線を低減するために、再構成方法及びプレゼンテーションを改善する最適化及びカスタマイズ方法を提供するものである。
従来のCTシステムでは、一般に、VOIの内部に埋め込まれたコンポーネントの空間位置及び又は向きを得るために、ROI全体又は対象をイメージングして3Dイメージを再構成することが必要である。本開示は、解像度、速度、FOV、測定の種類、スペクトル撮像の観点からVOI及びコンポーネントのX線測定を調整し、結果を最適化すると同時に放射線を低減するために、再構成方法及びプレゼンテーションを改善する最適化及びカスタマイズ方法を提供するものである。
本明細書に開示されるX線イメージングシステム及び装置は、国際特許出願番号PCT/US2019/044226、PCT/US2019/014391及びPCT/US2019/022820を含む参照国際特許出願(「PCT出願」)における開示を改善及び拡張するものであり、これらの各々の全体が参照により本明細書に組み込まれ、本開示の一部とみなされるべきである。
本明細書に開示されるX線システム及び方法は、ビーム粒子ストッパー配列プレート、デュアル又は複数の検出器を使用する散乱除去方法と、及び/又はスペクトル撮像及び材料分解方法を統合して良い。かかる材料分解方法において、変化した密度及び厚さにおける複数の既知の物質の測定値と、少なくとも1つの物質の材料分解に必要な正確な密度及び厚さ情報を得るための逆エネルギー応答関数系ルックアップテーブル法を利用して補間プロットが生成される。このようなイメージング装置及び方法の例が、図43a~bに示されている。イメージング方法は、本明細書に開示される任意のイメージング方法、例えば、前述のPCT出願及び本開示に記載されるような低解像度又は単一、デュアル又はマルチエネルギーイメージング方法、及び2D又は3Dイメージングを用いてROIを特定する工程を含んでもよい。
カスタマイズされたROIは、1つまたは複数のイメージング方法によってさらに確立されてもよい。本装置は、ROIをさらに調査するために、特定のアプリケーション要件及び放射線レベルに基づいて、ユーザー(複数可)、又はコンピュータ又はワークステーションによって実行される1つ又は複数のソフトウェアプログラムによって制御される自動システム(複数可)によって選択されてもよい。ROIの特定及び/又は分析及び/又は特性評価の処理は、ケースバイケースで反復法によって達成されてもよい。
ROI及び/又はイメージング方法及び/又は処理の選択は、物体ごと及び/又は用途ごとにカスタマイズすることができる。X線及び/又は他の方法又は他のモダリティを用いた以前の調査の結果に応じて、対象をより良く分析するために、イメージング方法の更なる適合及び微調整を行うことができる。
カスタマイズされた断層撮影及び/又はスペクトルイメージングのための装置及び方法は、データ及びアプリケーションの要件を優先させることによって決定され得る。例えば、より高い空間的、時間的又はスペクトル分解能の測定及び/又は再構成は、ハードウェア、ソフトウェア及び化学コンポーネントの同じセット又は異なるセットを用いて行われてもよい。このような処理は、診断、検査、イメージガイダンス、又は追跡及び監視といったイメージ測定及び解析の目標仕様を最終的に達成するために、反復されてもよい。ここに開示されたX線イメージングシステム及び装置において説明又は参照されるハードウェア、ソフトウェア又は化学コンポーネントの各々は、ユーザー又はデジタル又はソフトウェアプログラムの用途及び要求に基づいて、選択及び/又は組み合わせ又はミックスによってマッチングされる。
本開示のいくつかの局面は、1%未満又は5%未満のSPRでの多軸マトリクスイメージ取得及び再構成を使用する定量的スペクトルX線2D/3D/断層撮影を含み、リアルタイム2D及び/又は3D及び/又は6D透視及び寸法測定が可能な以下の技法を使用している。
- 1つのパルスイメージ取得処理を用いて実現される、SPR5%以下またはSPR1%以下の散乱除去による高速一次X線イメージ測定。
-ビーム粒子ストッパー配列を使用し、2つの検出器または1つの検出器構成で散乱を除去し、1回または2回の露光を行う。エネルギー応答関数方程式系の確立と逆ルックアップテーブルによる非線形エネルギー応答関数方程式系を解くことにより実現される、スペクトラルイメージング。
- SPR1%未満または5%SPR未満でのほぼ完全な散乱除去により実現される高速断層撮影と高度に定量的な3Dイメージおよび/またはスペクトル3D再構成、スペクトルイメージングまたは密度測定からの材料分解、簡素化されたシステムマトリックス、これによりモデルベースの反復再構成、フーリエ変換ベースの再構成が劇的に改善される。解析的または決定論的な反復アルゴリズムに基づく再構成、SART、SIRT技術、線追跡法、モンテカルロシミュレーション法、および拡張ハードウェア構成と介入装置設計と関連化学と造影剤に関わる複雑さにもかかわらずROIおよびその個々のコンポーネントのイメージ再構成を可能にすること。イメージ取得および再構成の前、中、後のROIの決定。2Dおよび/または3Dフォーマットでの重複する物質の差分表示、ダイナミックレンジの増幅、強度、選択的なカラー表示、選択した物質を他の物質の背景イメージと別々にまたはそれに対して強化されたコントラストで表示すること。
点、構造、1D-7Dイメージングにおける定量的イメージング法を用いて、例えば2倍から1万倍という劇的に少ない量を使用することにより、より低毒性にすることができるであろうスペクトル2Dおよび3D断層撮影に適した造影剤。
より良く制御、可視化し、介入処置や治療レベルのより良いガイダンスおよび/または監視を可能にする介入装置の設計。前述のX線装置をベースとした、自律駆動可能な可搬式装置。X線断層撮影システムの空間的構成により、自然環境下での生きた動物の活動や生活を高スループットで監視できる高スループット装置。X線断層撮影のイメージ取得と断層撮影の再構成と解析により、イメージング処理を高速化し、精度とパーソナライズ性を向上させることができるAI。
定量的なデータ解析とAI解析と断層撮影イメージの再構成の劇的な改善と採用を実現するための上記の標準化方法と散乱除去方法。より具体的には、定量的パーソナライズドX線イメージング/断層撮影システム、高解像度(サブマイクロ範囲)、および/または高感度、10-3モルより大きい、および/または高スペクトル解像度(複数のエネルギー)、および/または3Dイメージ取得あたり1秒未満、および/または1秒未満の再構成を人間の臨床に実装すること。
- 1つのパルスイメージ取得処理を用いて実現される、SPR5%以下またはSPR1%以下の散乱除去による高速一次X線イメージ測定。
-ビーム粒子ストッパー配列を使用し、2つの検出器または1つの検出器構成で散乱を除去し、1回または2回の露光を行う。エネルギー応答関数方程式系の確立と逆ルックアップテーブルによる非線形エネルギー応答関数方程式系を解くことにより実現される、スペクトラルイメージング。
- SPR1%未満または5%SPR未満でのほぼ完全な散乱除去により実現される高速断層撮影と高度に定量的な3Dイメージおよび/またはスペクトル3D再構成、スペクトルイメージングまたは密度測定からの材料分解、簡素化されたシステムマトリックス、これによりモデルベースの反復再構成、フーリエ変換ベースの再構成が劇的に改善される。解析的または決定論的な反復アルゴリズムに基づく再構成、SART、SIRT技術、線追跡法、モンテカルロシミュレーション法、および拡張ハードウェア構成と介入装置設計と関連化学と造影剤に関わる複雑さにもかかわらずROIおよびその個々のコンポーネントのイメージ再構成を可能にすること。イメージ取得および再構成の前、中、後のROIの決定。2Dおよび/または3Dフォーマットでの重複する物質の差分表示、ダイナミックレンジの増幅、強度、選択的なカラー表示、選択した物質を他の物質の背景イメージと別々にまたはそれに対して強化されたコントラストで表示すること。
点、構造、1D-7Dイメージングにおける定量的イメージング法を用いて、例えば2倍から1万倍という劇的に少ない量を使用することにより、より低毒性にすることができるであろうスペクトル2Dおよび3D断層撮影に適した造影剤。
より良く制御、可視化し、介入処置や治療レベルのより良いガイダンスおよび/または監視を可能にする介入装置の設計。前述のX線装置をベースとした、自律駆動可能な可搬式装置。X線断層撮影システムの空間的構成により、自然環境下での生きた動物の活動や生活を高スループットで監視できる高スループット装置。X線断層撮影のイメージ取得と断層撮影の再構成と解析により、イメージング処理を高速化し、精度とパーソナライズ性を向上させることができるAI。
定量的なデータ解析とAI解析と断層撮影イメージの再構成の劇的な改善と採用を実現するための上記の標準化方法と散乱除去方法。より具体的には、定量的パーソナライズドX線イメージング/断層撮影システム、高解像度(サブマイクロ範囲)、および/または高感度、10-3モルより大きい、および/または高スペクトル解像度(複数のエネルギー)、および/または3Dイメージ取得あたり1秒未満、および/または1秒未満の再構成を人間の臨床に実装すること。
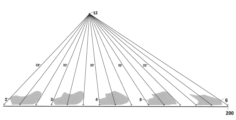
本開示は、改良型コンピュータ断層撮影イメージングシステムの実施例を提供する。このシステムは、複数の散開ビームを生成するように構成された少なくとも1つのX線源と、及び複数の放出位置から放出され、撮像される対象の少なくとも一部によって減衰したX線ビームを受信するように構成された複数の検出器とを含むことができる。前記複数の放出位置は、対象の関心体積(「VOI」)に対する第1の位置を構成する。第1放出位置から放出されたビームは、6次元空間または任意可能な投影ジオメトリの組み合わせのうち、少なくとも1つのx-y2軸平面に投影される。
構成において、複数の放出位置は、第2の位置を構成することができ、第2の位置から放出されたビームは、少なくとも1つの平面又は他の2D又は3D次元に投影され、VOI内の少なくとも1つのボクセルは、第1の位置から放出されたビームが進む投影経路上にあり、第1及び第2の放出位置間の距離がz軸に要望される分解能とほぼ同じである。
構成において、VOI内のボクセルは、ほぼ投影経路に位置することができる。
構成において、複数の放出位置は、第3の位置を構成することができる。
構成において、第3の位置から放出されるビームは、断層撮影に必要な6D空間の外側の軌道をたどるように構成され、異なるVOIを選択できるように対象の視野rの大きさを増加させることができる。
構成において、第3の位置から放出されるビームは、完全なイメージを再構成するために必要な6D空間の外側の軌道に続くように構成され、疎らな投影状況において又は少なくとも1つの異なるエネルギーレベルを有するX線源からの投影に対して異なる角度、及び/又は異なる焦点スポットサイズ又は異なる視野、異なるフレームレート又はエネルギー手段や電子手段や光学手段により異なる変調を提供するように構成される。
構成において、複数の放出位置のうちの1つ以上から放出されるビームが進む経路は、異なるX線源から放出されたビームも進むことができる。異なるX線源は、複数の異なるエネルギーレベル及び焦点スポットサイズ、又は複数の異なるフレームレートを有するか、又は異なるタイプの線源を有することができる。
構成において、システムは、複数の検出器のX線減衰データから取得するように構成された取得システムと、X線減衰データから得られる第1のデータセットを受け取り、第1の再構成イメージを再構成するアルゴリズムを実行するように構成されたイメージ再構成器とを含むコントローラーをさらに備えてよい。
構成において、第1のデータセットは、プライマリに対する散乱が1%未満又は5%未満である一次X線データを含むことができる。
構成において、第1のデータセットは、一次X線が時間領域において散乱から分離される飛行時間X線測定を含む散乱除去方法を用いて、散乱を除去されたデータから導出される一次X線データを含むことができる。
構成において、第1のデータセットは、可動のビーム粒子ストッパー配列及び/又は調整可能もしくは可動のビームセレクタを使用し、高解像度散乱イメージを生み出すために低解像度散乱の補間を使用した、1%未満もしくは5%未満のSPRを有する一次X線データを含むことができる。
ある構成では、第1のデータセットは、前方検出器、ビーム粒子ストッパー配列及び後方検出器から導出される1%未満又は5%未満のSPRの一次X線データであって、前方検出器又は後方検出器で高解像度散乱イメージを生じさせるための低解像度散乱の補間を使用したものを含むことができる。
ある構成では、前方検出器は、可動前方検出器とすることができる。
構成において、第1のデータセットは、放出位置及びVOIの複数に対応する複数の検出器による投影撮像データから導出されたデータを含むことができる。
構成において、第1のデータセットは、第1又は第2の位置の一方又は両方において選択された検出器領域によって測定された逆エネルギー関数システムルックアップから導出され得るデュアルエネルギー材料分解物質データセットに基づく投影イメージングデータから導出されたデータを含むことができる。
構成において、第1のデータセットは、複数の放出位置のうちの2つ以上において選択された検出器領域によって測定された逆エネルギー関数システムルックアップから導かれるデュアルエネルギー材料分解物質データセットから導かれるハウスファィド値(Housefied value)を含むことができる。
構成において、コントローラーは、少なくとも1つの物質についての注意喚起データを提供するために材料分解を実行するようにさらに構成することが可能である。
構成において、コントローラーは、第1又は第2の放出位置の一方又は両方で放出されたX線からのVOIの2Dデュアルエネルギー又はマルチエネルギー測定に基づいて、材料分解を生成するようにさらに構成することが可能である。
構成において、材料分解方法は、VOIの厚さの測定のために、飛行時間センサーまたはカメラまたは以前のX線被曝からの測定値を使用することを含むことが可能である。
構成において、飛行時間センサー及び又はコントローラーは、第1のセットデータ及び/又は第2のデータセットの少なくともいくつかを生成するX線測定の被曝レベルを決定するように構成可能である。
構成において、再構成方法は、CT、又はトモシンセシス、又はMRI、又は電子断層撮影、又は光断層撮影、又はサーモイメージング、又はPET、又はSPECTのための断層撮影再構成のためのアルゴリズム、又はその派生物を有することが可能である。
構成において、第1の再構成イメージは、フーリエ変換のオリジナルまたは派生物、線追跡法、モデルまたは輪郭ベースの反復再構成、材料分解法ベース、スペクトルCT、ART、モンテカルロシミュレーションベース、非空間ベースの再構成法、反復アルゴリズムおよびその派生物、フィルタ法、少なくとも一つの修正デュアル変数、または分割ベースのサブ問題法を含む再構成方法を用いて再構成されることが可能である。
構成において、コントローラーは、以下のようにして第1の再構成されたイメージを生成するように構成することが可能である。各ビームのX線減衰データを逆投影してデータ点の配列を形成し、各逆投影データ点を重み付け係数ω(r)(rは逆投影データ点と発散ビームの線源位置との距離)で重み付けして重み付き逆投影データ点を形成し、重み付き逆投影データ点を含むデータの配列をフーリエ変換して処理し、取得したk空間データセットを形成すること。取得したk空間データセットを参照k空間と整合させ、逆フーリエ変換を行うことにより参照k空間データからイメージを再構成すること。
構成において、前記システムは、自律走行装置と一体化可能である。
構成において、前記システムは、標準的なドアを通るように構成可能であり、複数の検出器は、患者と患者ベッド、手術台、又はイメージング台との間に配置されるように構成される。
構成において、前記システムは、スペクトル断層撮影マンモグラフィシステムとすることが可能である。
構成において、前記システムは、ハンドスイッチ、ディスプレイ、手持ちディスプレイ、フットペダル、ディスプレイ膜、ジョイスティック、音声認識、スピーカー、音響ノイズハードウェア、および電子機器とソフトウェアをさらに備えることができる。コントローラーは、前記ハードウェアおよび同期ソフトウェアの処理を統合するために、ハードウェアおよび同期ソフトウェアの一部を制御するよう構成されることが可能である。
構成において、前記システムまたはその構成要素は、キットの一部であることが可能である。
構成において、前記システムは、金属材料を分解する方法、ソフトウェア及びハードウェアを備えることが可能である。
構成において、前記システムは、介入装置又はそのような装置の1つ又は複数の部分、インプラント又は造影剤、微石灰化、造影標識された血管、造影剤を混合された石膏型を材料構成する方法及びハードウェアを含むことが可能である。
構成において、造影剤は、バリウム又はビスマスを有することが可能である。
構成において、造影剤は、従来のCT及び一般のX線及びMRI及びPET及び/又は磁性粒子ベースのイメージングで使用される造影剤の2倍から1000000倍の少ない濃度レベル及び/又はモル数レベルで投与することが可能である。
構成において、造影剤は、塩化カルシウム、グルトン酸カルシウム、ヨウ素化試薬、バリウム、ビスマス、ストロンチウム、ガドノリウム、PET及び/又はMRIで使用される造影剤を含むことが可能である。
構成において、介入装置は、人工心臓弁、RFアブレーションカテーテル、ケージ、ステント、インプラント、又は外科用具を含むことが可能である。
構成において、前記システムは、Cアーム、Uアーム、CTシステムを備えることができ、又は一般的なX線又はトモシンセシスシステムと同様のフットプリントを有することができる。
構成において、システムは、X線源の1つ又は複数と前記複数の検出器の1つ又は複数とを統合するように構成された第1のシステムマトリックスをさらに備えることが可能である。
構成において、第1の位置は、複数の検出器と少なくとも1つのX線源の元の位置を結ぶ中心軸から、2cm2未満、又は5cm2未満、又は1度未満、又は2度未満、又は3度未満、又は4度未満、又は5度未満、又は6度未満、又は7度未満、又は8度未満、又は10度未満の面積を備えることが可能である。
構成において、距離は、1um未満、又は5um未満、又は10um未満、又は50um未満、又は100um未満、又は160um未満、又は250um未満、又は500um未満、又は1mm未満、又は2mm未満。又は5mm未満、又は1cm未満又は2cm未満、又は5cm未満であることが可能である。
構成において、コントローラーは、10s未満、又は5s未満、又は2.5s未満、又は1s未満の時間で第1の再構成されたイメージを生成するように構成可能である。
構成において、システムは、従来のCTと比較して、放射線被曝を2倍、又は5倍、又は10倍、又は100倍、又は1000倍、又は10,000倍、又は100,000倍、又は1000,000倍減少させるように構成可能である。
構成において、システムは、光学、サーモ、PET、SPECT、超音波及び/又はMRIを含む追加のイメージングモダリティを統合するように構成された第2のシステムマトリックスを含むことができる。
構成において、参照検出器は、X線ビーム経路に配置され得る。
構成において、第1のデータセット及び第2のデータセットは、再構成およびデータ取得用の前記VOIを決定するためのAIアルゴリズムを訓練するために使用可能である。
構成において、コントローラーは、第1のイメージの再構成後または再構成中に、第2のデータセットを使用するように構成されることができる。
構成において、第2のデータセットが第1のイメージの再構成の後に使用される場合、第1の再構成は、第2のデータセットを組み込んだ第2の再構成において使用されるモデル又は輪郭又はデータを提供することができる。
構成において、第2のデータセットが第1のイメージの再構成中に使用される場合、コントローラーは、同じまたは異なるシステムマトリックスおよび修正変数・分割サブ問題方法を使用するように構成され得る。
構成において、第2のデータセットは、第1のデータセットを生成する1つ又は複数のX線イメージの取得時刻と同じ時刻に撮影する複数の検出器のうちの異なる検出器から得られるデータを有することができる。
構成において、異なる検出器は、第1のデータセットが取得された第1の検出器の上流又は下流又は同じ空間位置に配置された少なくとも1つの検出器を備えることができる。
構成において、第2のデータセットは、第1のデータセットを生成する1つ又は複数のX線イメージに対する取得時刻とは異なる時刻に取得されたX線測定からのデータを有することができる。
構成において、第2のデータセットは、第1のデータセットが取得された第1の検出器によって異なる時間に取得されるデータを有することができる。
構成において、第1及び/又は第2のデータセットは、ケースバイケースで、イメージ再構成中、前、又は後にノイズ除去されるように構成可能である。
構成において、ノイズ除去処理は、物質又はVOIに対して選択的に行われることができる。
構成において、第1及び/又は第2のデータセットは、正規化可能である。
構成において、取得システムは、イメージ再構成中にデータを選択的に取得するように構成することができる。
構成において、選択的なデータ取得は、第1のデータセットの再構成結果、又は選択されたVOIに基づくことができ、再構成は選択されたVOIに対して優先的に実行される。
本開示は、X線イメージング、および関連製品およびサービスのための例示的な支払いおよびトランザクション電子システムを提供する。
本システムは、以下を含むことができる。
購入者及びユーザーのためのソフトウェアプラットフォームであって、
少なくとも1つの場所で撮影されたX線イメージ又は関連する処置のための計量された情報を含む電子データベース、
データを暗号化するように構成されたデータ暗号化機構、および通貨の転送、通信、
買い手と売り手が合意したデジタル通貨または交換媒体であって、デジタル通貨がサイトカレンシーを含む、交換媒体、
少なくとも1つの施設からのメータ情報を収集するように構成されたサーバ、
イメージング位置の現場で又はクラウドを介してメータ情報を収集するように構成されたデータ収集機構であって定期的にデジタル通貨で請求される金額が、定期購入及び/又は購入者のアカウントからのイメージごとの支払いモデルに基づくことができる、データ収集機構。
購入者及びユーザーのためのソフトウェアプラットフォームであって、
少なくとも1つの場所で撮影されたX線イメージ又は関連する処置のための計量された情報を含む電子データベース、
データを暗号化するように構成されたデータ暗号化機構、および通貨の転送、通信、
買い手と売り手が合意したデジタル通貨または交換媒体であって、デジタル通貨がサイトカレンシーを含む、交換媒体、
少なくとも1つの施設からのメータ情報を収集するように構成されたサーバ、
イメージング位置の現場で又はクラウドを介してメータ情報を収集するように構成されたデータ収集機構であって定期的にデジタル通貨で請求される金額が、定期購入及び/又は購入者のアカウントからのイメージごとの支払いモデルに基づくことができる、データ収集機構。
構成において、システムは、以下を含む販売者用のソフトウェアプラットフォームをさらに含むことができる。
モバイルアプリ、ユーザー名とパスワードの入力とサインインと登録と関連情報を可能にするデスクトップアプリまたはウェブ・ポータル、および開発者ポータルを含むフロントエンドプレゼンテーション。
コアバンキングシステム、顧客データおよびその他のバックオフィス関連プロセスが配置されている商品層を備えるバックエンド。
フロントエンドとバックエンドおよびAPI層の間で情報を調整する仲介層を備えるミドルウェア。
構成において、販売者用ソフトウェアプラットフォームは、外部及び/又は第三者のアプリケーションへの接続を可能にするように構成されてよく、前記アプリケーションは、会計ソフトウェア、顧客及び/又はユーザーアカウント、ローン、支払い、マーケットプレイス、デジタルオンボーディング、支払いネットワーク、カード及びカード管理などを含む。
構成において、販売者は、デジタル銀行であってもよいし、又はデジタル銀行と提携して、ユーザーの電話及び/又は顧客の口座番号に基づいて、電気通信、ACH送金、及び/又は電子メール経由のデジタル銀行送金を可能にすることができる。
構成において、X線イメージは、散乱除去X線イメージングシステム、スペクトルX線イメージングシステム、CT、スペクトルCT、1つ又は複数の放射線サービスを伴うスペクトルCT、AI関連ソフトウェア、pac、イメージ保存、及び/又はイメージ処理によって生み出されるイメージを含むことができる。
本開示は、X線システムを使用して物体のVOIの3Dイメージを再構成する例示的な方法を提供し、X線システムは、少なくとも1つのX線源及び少なくとも1つの検出器を備える。本方法は、少なくとも1つのX線源及び/又は複数の検出器の1つ以上を並進及び/又は回転させることができる。投影測定値を、システムマトリックスを使用して、少なくとも1つのX線源及び少なくとも1つの検出器の様々な位置と相関させることであって、少なくとも1つの2D投影イメージについて、少なくとも1つのX線源は、VOI内の各ボクセルについて、VOIの少なくとも大半又はほぼ全体を照射するビームを放射するように構成されてよい。複数の検出器の1つに到達する新しい投影経路が存在することができ、放出位置の間各移動で、およそm×n個の投影経路が存在することができ、前記移動は、前記VOIを通過する前記少なくとも1つのX線源のX線管と前記少なくとも1つの検出器とを結ぶ軸線に沿って、ほぼ所望の分解能である。
構成において、投影の総数は、VOIの厚さによって近似されることができる。
構成において、投影の総数は、センサー、カメラ、又はX線イメージ露出値、又は飛行時間センサーの幾何学的測定によって近似することができ、近似は、少なくとも、VOIを含む対象の上部から少なくとも一つの線源までの距離を決定し、対象の上部から少なくとも一つのX線源までの距離を、線源-検出器距離(「SID」)から減算し;VOIの厚さを導出すること、を備える。
構成において、X線被曝レベルは、自動被曝方法及び装置、飛行時間検出器、及び/又は参照検出器によって近似されることが可能である。
構成において、中心軸からの総回転X線放出位置角度は、5度未満、又は4度未満、又は3度未満、又は2度未満、又は1度未満であることを特徴とする。
構成において、本方法は、X線放出ビーム体積の視野を拡大する、又は投影イメージを結合する、及び/又は既存のアプリケーション要件による移動の柔軟性を拡大するために、別の移動軌道、管回転角度、又は検出器角度と組み合わされるよう構成可能である。
構成において、前記要件は、対象の角度及び並進移動、又はVOIの移動を含むことができる。
構成において、各移動は、VOIの各ボクセルのために新しい投影経路を導入するよう構成可能である。
構成において、X線は、同じ位置又は異なる放出位置から放出されることができる。
構成において、X線システムは、複数の線源を備えることができ、各線源は断層撮影可能である。
構成において、複数の線源が使用されて同じシステムマトリックスで表されるように構成可能であり、各線源は複数の放出位置を有するか、又は複数の線源はVOIの投影イメージを生成するために移動するように構成されており、投影イメージは他のイメージと組み合わされてVOIの3Dイメージを再構成する。
構成において、各線源は、VOIの少なくとも1つの部分の投影イメージを投影するように構成可能であり、3D再構成は、少なくとも各線源によって生成される各セットの2つまたは複数の投影イメージのセットから導出され得る。
構成において、同じシステムマトリックスは、異なる線源を含むことができ、測定されたデータは、より正確な仮の3D再構成を確立するために組み合わされる。
構成において、3D再構成されたイメージは、異なる解像度の以前の3D再構成を通じて決定されるVOI、又はエネルギーレベル、又はスペクトルイメージ、又はシングルエネルギーイメージ、又は少なくとも1つまたは複数の異なるX線放出位置での3D再構成、を含むことができる。
構成において、投影イメージは、空間領域での補間を含む散乱除去方法及び/又は可動ビーム粒子ストッパー配列及び/又はビーム粒子ストッパープレート又は可動ビームセレクタによる積層検出器方法を用いてイメージ処理することが可能である。
構成において、少なくとも1つの関心物質又は複合関心物質について導出された減衰値及び/又は密度情報は、3Dイメージの再構成に用いることができる。
構成において、最終的な3D再構成がVOIを決定するために使用されることができる。
構成において、X線システムは直立に設置可能である。
構成において、X線システムはCアーム又はUアームに取り付けられることができる。
構成において、投影イメージは、より大きな体積を有する3Dイメージをもたらす、対象を組み合わせた3D再構成イメージ上の、異なるVOIに、存在可能である。
本開示は、以下のように構成されたコントローラーを含む例示的なX線イメージング装置を提供する。
複数の検出器で検出される物体のVOIを照射し、VOIから出た放射線の強度を表す投影データを取得し、または、第1検出器で検出された放射線と参照検出器で検出された放射線とから導出されるVOIに入る放射線強度に対する強度の比を取得すること。及び、第1のデータセットを生成すること。及び、得られた投影データに基づいて少なくとも第2のデータセットを生成することであって、第1のデータセットは第1検出器によって生成されたデータを有する。および、少なくとも第2のデータセットは、第1の検出器または第2の検出器によって生成されたデータから構成され得ること。ここで、投影データは、異なる放射線放出位置、エネルギーレベル、被曝レベル、及び/又は異なるシステム構成からのものであってよい。
構成において、コントローラーは、同じ第1の検出器、又は同じ第2の検出器、又は追加の検出器によって生成されたデータを含むより多くのデータセットを生成するように構成され得る。
構成において、装置は、異なる放出位置、異なる焦点スポットサイズ、及び/又は視野制限装置若しくはコリメータによって異なる視野を有する単一の放射線源を備えることができる。
構成において、装置は、第1及び第2の放射線源を備えることができ、第2の放射線源は、第1の放射線源とは異なる放射線源であるが、第1の放射線源の放出位置の同じ領域を進み、第2の放射線源によって放出される放射線は、異なる焦点サイズ、及び/又は異なるエネルギーレベル及び/又はパルス発生の速度のものであることが可能である。
構成において、装置は、第1及び第2の検出器を備え、第1検出器は、第2検出器と異なる検出器構成を有することができる。
構成において、装置は第3以上の検出器を備え、第1検出器と第2検出器、および第3以上の検出器のそれぞれの検出器構成は、検出器タイプによって決定されることが可能である。
構成において、投影ジオメトリ及び/又はピクセル要素は、それぞれの第1の検出器及び第2の検出器内に配置可能であり、コントローラーは、複数のデータセットを使用して結合イメージを再構成するように構成される。
構成において、複数のデータセットの各データセットは、複数のデータセットに対応するそれぞれの投影ジオメトリを表すそれぞれのシステムマトリックス方程式に対応することができる。
構成において、複数のデータセットの各データセットは、複数のデータセットに対応するそれぞれの投影ジオメトリを表すほぼ同じまたは類似のシステムマトリックス方程式または異なるシステムマトリックス方程式に対応することができる。
構成において、イメージは、以下のうちの1又は複数によって、一次に対する散乱の比率が1%未満又は5%未満のデータを有する複数のデータセットについて同じシステムマトリックスを使用して再構成されることができる。
低散乱VOI、
時間領域での散乱を除去することにより、飛行時間一次計測を使用すること、
低解像度散乱イメージの補間から高解像度散乱を得て、該高解像度散乱の減算から得られる一次X線イメージを含む散乱除去方法を使用すること、
ARTまたはその派生アルゴリズム、および/または反復法を使用すること。
低散乱VOI、
時間領域での散乱を除去することにより、飛行時間一次計測を使用すること、
低解像度散乱イメージの補間から高解像度散乱を得て、該高解像度散乱の減算から得られる一次X線イメージを含む散乱除去方法を使用すること、
ARTまたはその派生アルゴリズム、および/または反復法を使用すること。
構成において、イメージは、複数のデータセット、少なくとも1つの修正デュアル変数について異なるシステムマトリックスを使用し、分割に基づくサブ問題法を使用して再構成されることができる。
構成において、イメージは、複数のデータセット、少なくとも1つの修正デュアル変数について同じシステムマトリックスを使用し、分割に基づくサブ問題法を使用して再構成されることができる。
構成において、サブ問題は、データ生成の時間によって分離されたデータセットに対して実行することができる。
構成において、本装置は、少なくとも1つのより多くの追加データセットをさらに含むことができる。
構成において、システムマトリックスは、表面イメージを使用するためにAIによって導かれる光学センサー及びカメラの使用、及びROIを選択するためのAIを、取り込むことができる。
構成において、本装置は、ノイズを低減するために使用されるAIソフトウェアを備えることができる。
構成において、イメージは、1%SPR未満又は5%SPR未満に散乱除去することができ、シミュレーションにおいて散乱を考慮する必要性を回避することができる。
構成において、第1の位置から第2の位置へ移動したX線源の距離は、第1の位置から5cm未満、又は2平方cm未満、又は5平方cm未満、又は1平方cm未満、又は4平方cm未満、又は3平方cm未満及び/又は3平方cm未満であることが可能である。
構成において、第2の位置で放出されたX線は、第1の位置からのX線と同じ体積または6D空間位置を進むように構成され得る。
構成において、X線源は、X線フィラメント管又は他のタイプのX線源と同じ空間位置でX線を放出するフィールドエミッタとすることができ、又は焦点サイズ、エネルギーレベル、フレームレート、及び/又はジオメトリを含む同じ又は異なるパラメータを有する種々のタイプの線源又はその変調バージョンを使用することができ、又は異なるX線オプティクスによって操作されるか又は異なる機構によって操向され、同じ空間マトリックス、修正デュアル又はマルチ変数法、又は分割サブ問題法が使用される。
構成において、システムマトリックスを用いて、光学的方法を本発明のX線装置と併用することができる。
構成において、システムマトリックスにベクトルを使用することができる。
構成において、コントローラーは、デュアルエネルギーまたはマルチエネルギーX線を使用して、ピクセル単位で投影イメージ内のおおよそのエリアと分布を決定するように構成可能である。
構成において、データセットは、3D イメージを再構成するために使用されることができる。
構成において、コントローラーは、材料体積と空間分布をセグメント化し、および/または材料分解を行うように構成されることができる。
構成において、コントローラーは、さらなるスペクトルイメージングのための再構成の前及び/又は後のROIを決定するように構成されることができる。
構成において、コントローラーは、線源及び/又は検出器の動きを断層撮影システムの動きと組み合わせるように構成されることができる。
構成において、コントローラーは、造影剤分解を実行するように構成されることができる。
構成において、コントローラーは、X線吸収材料を識別するために、デュアルエネルギー分解又はマルチエネルギー分解を実行するように構成されることができる。
構成において、X線吸収材料は、以下のことを備えることができる。バリウムと混合された金属又は石膏の型。1つ又は複数の材料を有する、及び/又は異なるX線吸収特性又は原子番号zで作られたルーメン及びシースを有する、又はX線透明材料で挟み込まれた特定の空間位置に分布したX線吸収性材料で作られたカテーテル及び/又はインプラント。同じカテーテル又はインプラント内の背景及び他のセグメントと比較してその空間的分布を決定するのに十分な、またはピクセル単位で十分に特性化されたX線吸収特性を含むこと。あるセグメントを他のセグメント、石膏模型、血管、造影剤標識血管、微石灰化、及び/又は造影剤標識分子と区別するのに十分区別可能なものであること。
構成において、コントローラーは、ノイズを除去するように訓練されたAIソフトウェアを使用してノイズ除去するように構成されることができる。
構成において、コントローラーは、再構成のためのAIアルゴリズムのトレーニングで生成されたデータを使用するように構成されることができる。
構成において、本装置は、断層撮影装置の一部であることができる。
構成において、対象は、X線透過性であるテーブル又はベッド上に積載されることができ、テーブル又はベッドは、断層撮影装置の検出器ガントリーの上に配置される。
構成において、患者は、X線透過性である検出器ガントリーの表面上に横たわるように構成されることができる。
構成において、本装置またはその一部は、自律走行装置に接続することにより、クリニック内または病院外の遠隔地へ搬送可能である。
構成において、本装置は、標準的なドアの開口部の寸法より小さくてもよい。
構成において、本装置は、ポイント・オブ・ケア装置として使用され、及び/又は患者の部屋で使用可能である。
構成において、本装置は、移動可能であり、患者のベッドと患者の間に配置することができる検出器モジュールを備えることができる。
構成において、コントローラーは、ビーム粒子ストッパー再構成方法を用いて材料分解を行うように構成されることができる。
構成において、ビーム粒子ストッパー再構成方法は、同じX線放出位置で撮影されたイメージから、一次X線が遮断された異なるビーム粒子ストッパー配列位置でデータギャップを埋めることを含むことができる。
構成において、ビーム粒子ストッパー再構成方法は、再構成処理中にデータギャップを埋めることが可能であり、ビーム粒子ストッパーから外れた各投影経路はデータ入力を有さないものとして記載され、したがって、同じX線放出位置から生成されるために追加の投影データを必要としたり、あるいは疎なデータ3D再構成アルゴリズムを用いたりすることが可能である。
構成において、コントローラーがカテーテルまたはインプラントのおおよその密度および/または厚さを知っていれば、互いに重なり合う1つまたは複数の物質を含むカテーテルまたはインプラント内の金属および/または他の吸収物質に対して物質分解を実行することができる。
様々な実施形態は、説明のために添付の図面に描かれており、決して実施形態の範囲を限定するものとして解釈されるべきではない。さらに、異なる開示された実施形態の様々な特徴を組み合わせて、追加の実施形態を形成することができ、これらは本開示の一部である。対応する数字は、対応する部分を示す。
本開示の態様は、図及び様々な実施形態に関して提供される。しかしながら、当業者であれば、本明細書に開示された装置及び方法の他の実施形態及び構成は、いくつかの他の実施形態と同じ詳細さで記載されていなくても、依然として本開示の範囲内に入ることを理解するであろう。議論された様々な実施形態の側面は、本明細書の開示範囲を限定するものではなく、代わりに、この説明に続く特許請求の範囲によって定義される。
2D、3DのX線アプリケーション及びCT計算の定性的及び/又は定量的測定は、大量のメモリ及び計算を必要とすることがある。無線通信又はテザー通信を介して既存の検出器上に取り付けられた検出器モジュール又はアセンブリ又はサブモジュールは、検出器側で局所的な記憶及び計算、処理、イメージ再構成及び/又は保存用の1又は複数のマイクロプロセッサと、メモリ保存及び/又はデータベース保存又はデータベース機能を含んでいてもよい。表示は、ローカルに又はマイクロプロセッサから直接行われてもよく、又は無線又はイーサネット又はテザー通信手段を介して、表示及び場合によっては追加の計算及び保存のための第2のマイクロプロセッサに遠隔で行われてもよい。
イメージ再構成は、従来の回転CT及び/又はトモシンセシス電子断層撮影、MRI、PET、SPECT及び透過型光断層撮影のアルゴリズム及び方法を含んでよく、再構成のための精度、正確さ及び速度を改善するために、撮影対象スペクトル2D又は3Dイメージ内の各材料に対する材料分解、減衰値測定及び密度測定も含むことができる。それは、正規化されたピクセル・ベースの個々の物質に対する密度データの導出を介したイメージ取得及び再構成の最適化、及び取得前及び取得中の再構成のための関心領域(ROI)又はROIの選択領域の特定を介したイメージ取得及び再構成を含んでもよい。
X線測定又はコンピュータ断層撮影装置は、アプリケーションによって要求される新しい機能能力、特徴及び解像度に基づいてイメージ、測定値及び特徴を取得及び提示することに加えて、CTスライス画像及びデンシトメータ測定値などのユーザーに馴染みのあるユーザインタフェース及び手順を介して測定値及びイメージを提示する表示モードを提供するために断層撮影イメージ及び関連データから抽出してもよい。例えばCTイメージを使用して利用できない多数の提示モードを可能にする仮想現実ディスプレイ装置に対して従来利用できないイメージ及び数値を提示することもできる。
X線イメージングシステムは、1つ、2つ又はそれ以上の様々なタイプのX線源、例えば複数の線源を有するX線源、例えば、変化したX線放出領域、放出位置の数、エネルギーレベル、視野又は異なる技術プラットフォームの異なる線源、変化した焦点サイズ及び/又は準備時間、露出、速度、パワー、エネルギーレベル、エネルギーレベルの数、スペクトル波形特性、パルス期間、パルス特性及び/又は形態因子などのパラメータにおいて変化した価値を、ほぼ同時に又は時間枠で変化したX線放出位置において有することができる。図2~図6は、同じ関心体積が異なるタイプのX線源によって照会され得るように、1つ以上のX線源12‐a~12‐d、12‐e、13‐1~13‐4がVOI、2の上方に配置されるように移動可能であり得るシステム構成を示している。例えば、12‐aは、広視野のホットフィラメント従来管であってもよい。12‐bは、フィールドエミッタ源であってもよく、12‐cは、視野が制限され、又は低エネルギーレベルのX線のみを放出する源であってもよく、12‐dは、高流束、超明るい、線源であってもよく、関心体積をイメージングするために必要なエネルギー帯域幅及び流束を維持するためにフィルタにかけられるX線を生成し得る。
図7は、同じ又は異なるX線源を使用してアプリケーション要件の要求に応じて同じ関心領域をイメージ化するために1つ又は複数の検出器を移動させることができることを示す。
例えば、図1は、単一の線源の2つの重複する放出位置12‐1、12‐2を示し、各放出位置は、変化した焦点スポットサイズを有することができる。
図示されたX線システムは、単一の検出器アセンブリ22による散乱除去が可能である。X線源からコーンビームまたは発散3次元形状を有する複数のビームとして放出された投影ビームの一部は、関心体積を通過してビーム粒子ストッパープレート100上のビームストッパー粒子によってブロックされる。X線透過性のX線サンプルホルダ40が設置可能である。イメージ処理は、散乱、及びサンプルホルダ40の減衰効果がある場合にはそれを、除去してもよい。
場合によっては、2つ以上の線源が、より速い3D再構成のために一緒に移動されることがある。例えば、各線源は関心体積(Volume of Interest (VOI))を照らし、2つ以上のそのような関心体積は最終的な関心体積を形成するために組み合わされることがある。線源は、アプリケーション要件、例えばZ軸における解像度要件、に依存するイメージング手順及び動作速度を最適化するために、互いに対して独立して移動させることができる。X線源は、同じ3D関心体積をイメージするために、同期または非同期の方法で操向されてもよい。1つ以上の検出器と、該検出器と対をなす1つ以上のX線源とを有する1のX線イメージングシステムは、X線検出器アセンブリ22の上流又は下流に移動可能であってもよいし、検出器22に代えて関心体積をイメージする位置に移動可能であってもよい。
各プロジェクトジオメトリ構成から導かれるいくつかの又は本質的に全ての投影イメージは、イメージ処理の再構成及びデータ解析のために、座標及び/又はベクトルの数を調整したシステムマトリックスに表され、組み込まれることが可能である。
<断層影像法、または3Dイメージング、または多次元イメージング、スペクトル3D、スペクトル断層撮影法、非回転CT、パーソナライズドCT、nマトリックス法>
1%未満又は5%未満のSPRで多軸マトリックスイメージ取得及び再構成を使用するスペクトルX線2D/3D/断層撮影は、リアルタイム2D及び/又は3D及び/又は6D透視及び寸法測定が可能であり、以下の装置及び方法を含むことができる。
1%未満又は5%未満のSPRで多軸マトリックスイメージ取得及び再構成を使用するスペクトルX線2D/3D/断層撮影は、リアルタイム2D及び/又は3D及び/又は6D透視及び寸法測定が可能であり、以下の装置及び方法を含むことができる。
図29は、装置の一例を示し、nマトリックス、n2マトリックス法及びスペクトルイメージング法を用いた断層影像法、又は3Dイメージング、又は多次元イメージング、又はスペクトル3D、又はスペクトル断層撮影、又は非回転CT、又は個人化CTのシステムとも呼ばれる。
本実施形態は、線源12に関し、X線放出位置の2D領域16を含むことができる。X線放出位置16は、3D - 6Dの空間位置又は体積であることもできる。装置はまた、イメージされる対象2、及び/又は関心体積、VOI 2、検出器又は検出器アセンブリ又は検出器モジュール20を含むことができる。
関心体積のZ軸に沿った解像度は、およそXcである。Xcは、空間的位置または体積またはX線放出位置16の2D領域におけるX線放出位置の位置1および位置2間のおおよその距離である。
位置1及び位置2は、X線トモグラフィーのための第1位置と呼ばれることがある。放出位置間の距離が小さいほど、関心体積及び/又はイメージ対象2を更にイメージングして、断層撮影又はイメージ解析及び処理目的のために追加のイメージを提供することが可能であり得る。放出位置間のより小さい距離、又は第1位置以外の放出位置(場合によっては、第2位置(second positions)と呼ばれる)は、必要に応じて、関心体積の外側に新たに導入された未知を解像するために使用されてもよい。あるいは、第2位置は、検出器又は検出器モジュール20に垂直な、オブジェクトの深さに沿った、より高い解像度を有するボクセルを解像するために使用されてもよい。
本開示のイメージングシステムは、任意選択で、真の又は完全な3Dボリュームメトリック再構成が可能な非回転、非接触のイメージングシステム構成とすることができる。本技術の追加の詳細は、国際特許第WO/2019/183002号明細書に記載されている。この方法の基礎は、もし2D投影イメージが6D体積のXcの整数倍で、あるいは少なくとも2D領域、例えば検出器又は検出器モジュール20に平行な2D平面上で捕捉されるならば、関心体積の完全な3Dイメージを再構成するために、非常に小さな領域移動又は小さな角度移動及び/又はX線源の全体移動のみが必要であることである。上述したように、Xcは、関心体積2をZ軸又は深さで撮影するために望まれる解像度であり、場合によってはX線照明の中心軸に平行である。イメージングジオメトリは、物体又は関心体積2に対応する検出器に平行な2D平面におけるX線源/X線放出位置の移動領域を減少又は最小化するように構成されてもよい。関心体積2内の未知ボクセルを解像するために、「ボクセルニ」と表記される未知ボクセルが関心体積2外に新たに導入され、未知ボクセルは関心体積2内の未知ボクセルの総数よりはるかに小さくてもよい。ひいては、粒子投影経路に新たに導入される未知ボクセルの数は、関心領域内の未知ボクセルの数よりかなり小さくてもよい。従って、関心領域外の未知ボクセル、ボクセルニ、による寄与は無視しても構わない。この方法及びシステム構成を用いると、完全な3Dイメージ又は完全な断層撮影イメージを再構成するために、「NTT」と表記される2Dイメージの総数を最小にすることができる。
高い正確性又は高精度の断層撮影測定が必要な場合、関心領域外に新たに導入された未知のボクセルの解像は、同じ領域又は同じ体積内の第1位置から第2位置への移動によって達成できるが、第1位置とは異なる空間位置である多数の第2位置においてX線を放出する。そして、第2位置(second positions)間の距離は、Xcより小さくてもよいし、あるいはXcより大きくてもよいし、あるいはXcと同じでもよいし、変化させてもよい。さらに、X線照射体積は、例えば、コリメータによって縮小されてもよく、これによりX線ビームの照射経路にある関心領域内の新たに導入された未知のボクセルおよび対応するボクセルを含む体積のみが繰り返し照射され、関心領域外に新たに導入された未知のボクセル(ボクセルニ)の照射経路に位置しない関心領域の不必要な部分への追加の被曝を避けるために、残りのX線ビームが切り取られることがある。
図29は、本方法を説明する図である。このジオメトリの理論的基礎である「nマトリックス」は、位置1または位置2のような各X線放出位置で、関心体積内の各経路のボクセル(黒くハイライトされている)の空間位置に基づいて区別されるX線照射経路の唯一のセットが検出器20上の対応するピクセルによって測定されるということである。X線放出位置間の距離がXcと同じくらい小さいので、もし2D平面上の総進行領域16が少なくとも関心体積の深さに等しければ、元の位置に対する2D領域16の総移動角度を1度未満にすることができ、このようにしてX線放出位置の移動により関心体積外に導入される未知のボクセルの数は最小化される。理論的に達成可能な解像度は、市販の検出器を用いて達成可能なXYZ次元で1桁のミクロンメートルとすることができる。3Dイメージの取得は、CTスライスと同様、またはそれ以上の解像度を達成するために1秒未満で行うことができる。
ボクセルの減衰値を解く際に、各ボクセルは、0又は1の値、透過していれば0、透過していなければ1、又はある値で減衰する値を設定されてもよい。
各ボクセルは、0からある減衰値までの透過値を与えられてもよいし、あるいは別の範囲の減衰値で伝送するように1が設定されてもよい。
したがって場合によっては、およそある範囲の値を0とし、別の範囲の値を1とすることができる。例えば、人体診断において、空気減衰を0と設定すると、残りの体組織の体積領域はおよそ1に設定され得る。
別の場合では、骨材料で満たされたボクセルは1であり得、そして残りの体組織の体積領域はおよそ0に設定され得る。
複数のセットの線形方程式を使用して、異なる概算範囲及び閾値で設定された1又は0を有する未知のボクセルを解像することができる。
本方法は、異なる減衰値の範囲に対応するように1又は0を再び設定し、未知のボクセル値が1又は0のいずれであるかを解くことができる。本方法は、減衰値の異なる範囲で処理を繰り返したり反復したりすることができる。
いくつかの場合において、そのような方法は、先述したPCT出願に開示されているようなデュアルエネルギーまたはマルチエネルギー分解方法と組み合わされることがある。
いくつかの場合において、複数のエネルギー測定を利用して、各ボクセルを特徴付け、特定してもよい。1つ以上のボクセルは、その減衰値範囲に基づいて関心体積内の他のボクセルからセグメント化されてもよい。各セグメントの厚み又は空間的な体積及び位置が導出されてもよい。ボクセル、及び/又は各物質及び/又は複合物質の単一又は複数のエネルギー測定に対応する参照データベースがある場合、正確な密度が決定されてもよい。
断層撮影方法は、以下のものを含むことができ、番号付けは必ずしもステップの順序を示すものではなく、可能な工程のリストを示すものである。
1)測定された2Dイメージは、一次イメージと散乱干渉に分離することができ、したがって、検出器によって達成可能な最高解像度及び定量的2D一次イメージを達成することができる。
2)もし線源から放出されたX線が、イメージ対象を照射するコーンビームであり、もし最初の位置(位置1)でX線が関心体積を照らした場合、検出器上または各検出器領域の各ピクセルの測定に対して、X線放出位置に遡ることができる予測経路のVOI内のボクセルが多数存在する。図29に示すように次にX線放出位置が別の場所、例えば位置1から1ピクセルピッチだけ離れたxy平面上の位置2に移動したとき、図29に示すように新しい照射経路は各々における空間位置の明確なボクセルの組み合わせを含むので、最初の照射経路のセットとは区別された新しい照明経路のセットが測定される。位置1と位置2との間の距離は、検出器に垂直なZ軸における関心体積の所望の分解能であるXcとすることができる。関心体積内のすべての未知のボクセルを(m×n×p)の体積次元で解像するために、m、n、pは各軸に沿ったボクセル数を示し、mとnはそれぞれx方向とy方向のボクセル数に対応し、各照射経路に含まれる空間的に明確なボクセルに基づいて互いに異なるp個の照射経路のセット数は、完全な3D体積構造を解像するために検出器によって測定されることが最小限必要であり得る。
3)関心体積の外側にある未知のボクセルの最小化。撮影時にVOIの外側に導入される未知ボクセルの数を最小化するために、X線放出位置の元の開始位置からの移動を最小化することが好ましい。一つの構成は、xy平面内で放出位置を移動させ、隣接する放出位置をピクセルピッチまたは単位測定値=Xcだけ離すように制限することである。図29に見られるようにXcは、検出器のx方向およびy方向にそれぞれ沿った画素ピッチ寸法であるXaおよびXbと等しいか、またはそれ以上であってよい。あるいはX線放出位置は、断層撮影のための総移動角度を最小にするために、3Dまたはそれ以上の次元で移動してもよい。
4)必要なX線放出位置の総数Pは、Z軸に沿うXcの総数である。必要なX線放出位置は、イメージング処理時の移動および新たに導入される未知数の数を最小にするために、2次元平面上に配置されてもよい。例えば、直線的に移動する場合、関心体積内の未知ボクセルを解くためには20cm必要であるが、同時に、X線コーンビームが移動すると関心体積外の領域が照射されるため、イメージング処理時に多くの未知が導入されることになる。しかしもしX線放出位置がxy次元で移動させられれば、照明される総体積を最小にすることができ、もし線源(Sourse)―検出器(detector)間距離(SID)=1mであれば、総移動角は1度未満にすることが可能である。その結果、関心体積の外側にある未知のボクセルの数は劇的に減少する。例えば、0.5mmの分解能が必要な場合、20 x 20 mm2の領域のみで、完全な3D体積領域で未知を解像することができる。これらの特徴により、完全な3Dイメージング再構成のためのX線源の移動機構の設計の複雑さが大幅に軽減される。X線放出位置の移動を実施するハードウェアは、a)モータ駆動併進ステージ、b)X線発生における電子ビーム用電磁操向装置、及び/又はc)複数のX線ピクセルサイズ源が2D平面上で互いに隣接して配置されているピクセル化X線源を含むことができる。電子ビーム操向装置は、a)ステップのサイズと解像度がミクロン領域でありながら小さく低コストであること、b)電子ビーム操向装置が機械的可動部なしでX線放出位置を動かすので複雑さが大幅に減少し、動的柔軟性と振動によって引き起こされる収差を最小限に抑え、コンパクト性と騒音性能が向上することから、モータ駆動実装よりも好まれる。電子ビーム操向装置は、先述したPCT出願に記載されているように、X線管に取り付けることができる。
電子ビーム操向装置の操向時にビームセレクタを移動させてX線放出位置に合わせるために、機械的な移動体を使用することができる。また、X線源の位置合わせのためにセレクタを移動させることは、後方検出器上の主ビームの大きさがmm範囲であるため、X線放出位置の移動のたびに必要ない場合がある。
また、単一の検出器を使用する場合、このような検出器の移動は、断層影像法において必要無い場合がある。
<断層影像法または3Dイメージ取得 ― 回転>
場合によっては、線源又はX線放出位置、又は線源と検出器の対は、対象物の周りにピッチ又はヨー又はロールで、好ましくは少なくとも二つの回転方向で、対象物に対して回転されてもよい。
場合によっては、線源又はX線放出位置、又は線源と検出器の対は、対象物の周りにピッチ又はヨー又はロールで、好ましくは少なくとも二つの回転方向で、対象物に対して回転されてもよい。
X線放出位置と検出器の対の回転移動は、検出器に平行な2D平面上の1軸方向へのX線放出位置移動と組み合わされてもよい。この場合に検出器は、X線放出位置と一緒に移動してもよいし、移動しなくてもよい。
関心領域の厚みに必要な解像度を達成するために生成される投影イメージの総数を減らすために、各位置は、関心領域を横切る照射経路の新しいセットを可能にする他の位置と異なり、本ステップ(すなわち、ある位置から別の位置への移動)サイズは、検出器に垂直な軸であるz軸に沿った分解能の約1単位であってよい。照射経路の変動は、同じピクセル又は検出器領域によって収集される対応する経路から少なくとも約1ボクセルである。
X線源は、平行ビーム又はX線ファンビーム又はコーンビームを生成されてもよく、平行ビーム又はファンビームのフォーマットでプレゼンテーションに変換されてもよい。システムの複雑さを低減し、イメージ取得の速度を向上させるために、移動及びステップサイズを最小化することができる。毎回、新しい投影経路のセットは、前後に撮影された投影イメージのセットと比較して独自であってもよい。
本明細書に開示される3D X線イメージングシステムは、X線放出位置が、少なくとも2軸、又は2次元で、例えば6つの自由度、x y z回転、ヨー、ピッチのそれぞれで、減少した及び/又は最小の数のステップで対象に対して移動されることを含むことができる。各ステップは、およそz方向に必要な検出器解像度の1ピクセルピッチであり、移動は、例えば、磁気または電子レンズまたは機械的またはモータ駆動、または電磁的方法によってもたらされ、これらは、X線源の各々に含まれるかまたは取り付けられることが可能である。
X線システムは、X線源(複数可)及びその対応する検出器(複数可)を含むことができ、これらは両方とも1次元又は複数次元で移動し、任意に同期させることができる。あるいは、検出器又は線源は静止していてもよく、関心体積又はイメージされた対象は移動してもよい。あるいは、線源は、対応する検出器と無関係に移動することができる。
X線源及びその対応する検出器(複数可)を含むX線システムは、1次元又は複数次元で移動してもよく、なぜなら、特にセンサーが本明細書に開示されるように2つの検出器の間に挟まれたビームセレクタを含む3層バージョンである場合、又は前部に低エネルギー検出器、後部に高エネルギー検出器を有する積層検出器である場合、センサアセンブリ(1つ又は複数の検出器及びビームセレクタを含んでもよい)が比較的小さく、移動によって線源の焦点位置をセンサーに合わせることができるからである。
X線照射体積は、例えばコーンビームまたは平行ビームであり、したがってX線放出位置またはX線を放出するX線管は、物体に対してピッチ、ヨーまたはロールまたは少なくとも一つの軸で回転することができる。
これに対応して、検出器又は検出器アセンブリは、X線照射の中心軸に整列するように、対象物、又は図29の関心体積2に面して回転してよい。場合によっては、線源12又は物体2の移動又は回転運動が、関心体積を通過するX線照射が検出器又は検出器モジュール20によって捕捉され得るようなものであれば、そのような回転は必要ない。
検出器及び検出器モジュール20は、X線放出位置又はX線管の移動と共に、断層撮影又はスペクトル断層撮影イメージ取得のために、対象物に対してx y z体積で移動してもよい。
図42は、X線断層撮影システムの複数の線源を示す図である。場合によっては、3D再構成を高速化するために、線源が一緒に移動される。各光源は関心のある体積(関心体積)を照らし、2つ以上のそのような関心体積が組み合わされて最終的な関心体積を形成する。Z軸の解像度要件などのアプリケーション要件に応じてイメージング手順と速度を最適化するため、線源は相互に独立して移動できる。X線源は、同じ3D関心体積をイメージングするために、同期または非同期の方法で操向されるとよい。1つまたは複数のX線源と対をなす1つまたは複数の検出器を備えたX線イメージングシステムは、X線検出器の上流または下流に移動可能であり得る。
装置および方法は、データギャップの欠落がないかまたはほとんどない完全な断層撮影イメージの再構成のために最小の露光回数が取られるので、完全な断層撮影イメージに必要な時間を最小にする。
<スペクトルCT>
本断層撮影方法は、例えば、広帯域X線源とフラットパネル検出器及び/又は2次元検出器との組を含むデュアルエネルギー又はマルチX線システムを利用し、逆エネルギー応答関数方程式法を用いて材料分解を行い、各物質の密度及び厚さを解く材料分解法と組み合わせることができる。
本断層撮影方法は、例えば、広帯域X線源とフラットパネル検出器及び/又は2次元検出器との組を含むデュアルエネルギー又はマルチX線システムを利用し、逆エネルギー応答関数方程式法を用いて材料分解を行い、各物質の密度及び厚さを解く材料分解法と組み合わせることができる。
あるいは、材料分解法は、メディピックス(medipix)と同様のマルチユニットピクセル検出器を有する従来のCTシステムを使用したスペクトルCT法を利用してもよい。各検出器は、エネルギー閾値を伴うエネルギー感受性の検出器、または光子計数検出器、または積層型デュアルエネルギー検出器、またはフィルタ付き準単色または単色線源と検出器である。
スペクトルCTのバリエーションは、フラットパネル又は2D検出器と、線源及び検出器又は断層撮影又はスペクトル断層撮影又はスペクトルイメージ用の検出器モジュールのセットを使用するフルフィールドイメージを含むことができる。検出器は、オプションとして、例えばエネルギー分散型グレーチング及び空間感応型検出器のための分光器又は分光吸収計であってもよい。
場合によっては、低解像度の断層撮影イメージのように、断層撮影イメージを再構成する必要がなく、関心体積が特定されることがある。そして、関心体積内の物質をさらに照会するため、適切なスペクトルイメージが使用されてもよく、関心物質が位置する関心体積層の外のすべてものを「第2関心体積」又は「関心体積その2」と表記する。
<断層撮影システム及びデュアルエネルギー及びスペクトルイメージングシステムの派生物>
本開示のX線システム及び方法のモジュール化された能力のために、システムの修正及び/又は拡張、及び/又は本明細書に開示された測定システム、及び/又は修正、及び/又はX線イメージングシステムのハードウェア及び/又はソフトウェアの一部又は全部の変更及び/又は拡張を変更して、分析、測定、診断、及び検査能力を有するハイブリッド測定システムを形成することも、本開示の一部である。
本開示のX線システム及び方法のモジュール化された能力のために、システムの修正及び/又は拡張、及び/又は本明細書に開示された測定システム、及び/又は修正、及び/又はX線イメージングシステムのハードウェア及び/又はソフトウェアの一部又は全部の変更及び/又は拡張を変更して、分析、測定、診断、及び検査能力を有するハイブリッド測定システムを形成することも、本開示の一部である。
CT、O-リング、Cアーム、デンシトメータ、マイクロCT、デジタルトモシンセシス、様々な構成の一般的なX線イメージング、フルオロスコープ、ロボット工学用の外科誘導システム、及び最小侵襲介入処置、分光イメージング、放射線治療、ヘリカルCT、Kエッジ(k-edge)イメージング、携帯イメージングなどの既存のX線測定及びイメージングシステムについて、解像度及び/又はフレームレート及び/又は精度の向上及び/又は低放射線化及び/又は断層撮影における取得及び再構成に必要な時間の短縮、並びに材料分解を含むスペクトルイメージ化機能を提供するよう、及び/又は定量的なイメージングのために散乱を1%未満又は5%未満のSPRに低減するための散乱除去機能を提供するよう、モバイル撮影システム、及び様々な空間システム構成は、本開示のX線撮影システムの一部又は全部を統合することによって改善することができる。
また、検査、診断、監視、又は追跡を実現するために必要な関心領域の情報が非常に少ない場合もある。診断や監視や追跡のために必要な関心領域の情報は、高解像度3Dよりはるかに少ない。それらの場合、取得されるイメージの総数は、完全な断層像が再構成されるために必要なイメージの総数(m×n×p)であるNTTより少なくてもよい。
物質的に解体された測定値、および/または、点から3Dへの測定と、これらの間の任意の数の関心領域(または関心領域の分配された部分)の測定値は、所定の情報に基づいて、及び/又は本開示の方法及び構成を使用することによる断層撮影イメージに基づいて、及び/又は従来のCTと本開示の方法を組み合わせ、及び/又はその派生物、又はその変形、又はトモシンセシス、又は他のモダリティと組み合わせに基づいて、関心領域又は関心領域の1つ以上の部分を十分に特定及び/又は特徴付けるために測定されることができる。
関心領域を特定し、特徴付けるための十分性を確保する方法は、ユーザーまたはデジタルプログラムまたは確立されたデータによって、保存された既存のデータベースで決定されてもよい。例えば、各アプリケーションまたは各タイプの測定または所定の関心領域について、関心領域の特性およびアプリケーションの要件に基づいて、関心領域のイメージを再構成するために必要な測定回数をユーザーが決定し、またはデジタルプログラムが決定してもよい。
AI又は深層学習は、限られた数の測定値に基づいて関心領域を特定及び特徴付けるために使用されてもよい。AI又は深層学習アルゴリズムは、いくつかの例では、深層学習を行わないデジタルプログラムと組み合わされるか、又はユーザー入力と組み合わされて、関心領域の特性及びアプリケーションの要件に基づいて関心領域の特定及び/又は再構成に必要な測定値の選択について最適化された手順及び/又は方法を決定するために使用されてもよい。
深層学習又はAIプログラムは、所定の数の測定及び測定ステップ及び/又は手順を含むデータのセットによって訓練され、低減された露出及び/又は最小化された露出でROI又は複数のROIを特定又は再構成又は特徴付けすることができる。そのようなアルゴリズムは、それによって、未知のボクセルのROIを撮影する際に使用されて、未知のボクセルのROIを特定し、及び/又は特徴付けし、及び/又は再構成することが可能である。
このような一連の測定は、撮影処理の前に一度再構成された高解像度CTイメージの代わりに、圧縮されまばらにされたイメージング方法を使用する現在の測定方法とは異なる場合がある。その相違点は以下の通りである。
- ROIを特定又は特徴付けるためにCTイメージ又はスライスされたCTイメージを再構成する必要がないので、測定及び/又は測定ステップの数は、圧縮及びスパースされたイメージセットよりもずっと少なくなる。
- ピクセルレベルでの材料分解の測定は、本開示においてROIを特定するために使用されてもよい。
- ROIが十分に特徴付けられる前に再構成が行われる必要があるのに対して、ROIの特徴付け及び特定は、本開示では再構成の前に行われてもよい。
- 密度値のような定量的測定値は、ROIの特定、特性化及び決定において、及び/又はスパース圧縮イメージング法に関連する現在のCT法では使用されていない深層学習処理において使用される。
- スパース化された断層撮影法では、VOI全体が各投影イメージで照明され、投影の総数が減少する可能性がある。本開示では、各投影測定は、VOIの選択された領域における単なる1点又は1D又は分散2Dイメージであってもよく、投影の総数は、アプリケーション要件に応じて低減されてもよい。場合によっては、投影イメージの数は、イメージ自体が断層撮影再構成に直接つながらないかもしれないようなレベルまで減らされ、測定データとは独立した追加のデータが必要に応じて断層撮影再構成に使用されてもよく、それによって、イメージ取得又は再構成のための被ばく及び/又は時間を大幅に削減する方法を提供することができる。
- 放射線レベルは、本開示では、はるかに複雑でないジオメトリ構成、減少した投影数が断層撮影において必要とされるように最適化された測定ステップ、及びVOI内の異なるタイプ、及び/又は寸法及び/又は変化した空間位置の測定を含み得る手順の最適化に起因して、著しく少なくなる。
圧縮された及び/又はまばらにされたイメージング条件に対するCT及びトモシンセシスのイメージ再接続のために開発された以前の方法は、依然として使用され得る。取得されたイメージの総数がNTTより少ない場合、又は各2DイメージがZにおける所望の解像度であるXcの解像度より低い場合、又はステップサイズがXcより著しく大きい場合、圧縮された及び/又はまばらにされたイメージング方法は、使用されるかもしれない。
圧縮され、まばらにされたイメージング法では、X線源は、対象に対して、ただ1つの軸上を移動する。ROIから外れた領域で新たに導入される未知数Voiは、特に各X線ビーム経路において、ROI内のボクセル数と比較して比例的に大きくなる。
<定量的イメージの準備及び標準化>
定量データ及びイメージの材料分解及び/又はイメージ再構成又は分析は、X線システムの構成に関係なく、測定されたデータがイメージされたオブジェクトの組成及び構造を正確かつ精密に反映することを必要とすることがある。
定量データ及びイメージの材料分解及び/又はイメージ再構成又は分析は、X線システムの構成に関係なく、測定されたデータがイメージされたオブジェクトの組成及び構造を正確かつ精密に反映することを必要とすることがある。
この目標を達成するために、定量的データ取得及び再構成の前、間及び後に、準備手順、処理モデル、アルゴリズム及び測定の手順の開発と同様に、X線システム間の標準化が行われる場合がある。
<正規化及びデータ/イメージ処理>
データ及びイメージの取得前及び取得後、及び/又はノイズ除去、ダークノイズ、ホワイトイメージ、フラットフィールド、ゲイン、検出器の整合性、アーチファクト、デッドピクセル、ビームハードニング、視野修正、位相回復のための再構成後、及び/又は正規化し、及び/又はCTやトモシンセシスで使用されるその他の前処理や後処理を使用して、データおよびイメージ取得のためにイメージ処理が必要な場合がある。
データ及びイメージの取得前及び取得後、及び/又はノイズ除去、ダークノイズ、ホワイトイメージ、フラットフィールド、ゲイン、検出器の整合性、アーチファクト、デッドピクセル、ビームハードニング、視野修正、位相回復のための再構成後、及び/又は正規化し、及び/又はCTやトモシンセシスで使用されるその他の前処理や後処理を使用して、データおよびイメージ取得のためにイメージ処理が必要な場合がある。
幾何学的な動き及び計算によって誘発されるアーチファクトは、ポストイメージ再構成において同様に除去されてもよい。
かかる処理には、光子計数および/または吸収および/または透過の観点に基づく測定が使用されてよい。
前処理及び後処理方法は、同じX線システムの使用を通じて一貫した測定を行うため、及び/又はX線システムの使用とそれに似た他のもの、特にシステムの同じ製造業者のもの、及び/又はシステムで使用されるコンポーネントとの間の一貫性のために、データ及びイメージを準備することである。それはまた、定量的分析、スペクトルイメージング材料分解などの機能的イメージング処理、流体力学的分析及びモデリング、並びに3D再構成のために使用されてもよい。図11は、データ及びイメージ処理に係るイメージ前処理、イメージ取得後の処理、及び断層イメージ再構成後の処理の様々な手順の例を列挙したフローダイヤグラムである。一実施例では、散乱除去により散乱を1%SPR以下に低減する。
データ前処理(PCP)及び後処理モデル(PRP)は、データベース、エネルギー応答関数方程式系及び/又はプロット系に基づく標準及びアルゴリズム、又は線源、検出器、フィルタ、シンチレータ、検出器タイプ、などの同等又は比較できないハードウェアを含むX線イメージングシステム上に構築された参照データライブラリ、コリメータ、ビーム粒子ストッパアレイプレートのような散乱除去ハードウェア、対象と検出器の間のサンプルホルダ、及び/又はX線光学、能動X線変調器、受動変調器、X線を操向、操作及びpertubeするために使用される光学、又はX線から得られる光学信号、を利用するように作成されてもよく、これらはそれぞれ検出器の測定および他のモダリティに影響を与える。
例えば、1つのモデルでは、1つ以上の既知の材料、または既知の空間的もしくは材料組成を有する1つ以上のファントムの測定を介して、システムを別の標準X線システムに相関させることができる。測定されたデータから導出された物理的特性及び特性値からの偏差は、標準X線システムからの導出と比較して、X線システムを標準X線システムに相関させる。
標準的なX線システムは、多くの測定を行い、単一、デュアルまたはマルチエネルギーシステムに対する材料分解のようなデータベースと定量分析モデルを構築することができる。
相関関係によって、X線イメージングシステムがデータベース、あるいは標準X線システムに基づく定量分析アルゴリズムおよびモデルを利用したり、役に立ったりする。
異なる製造業者間、異なる製造業者によって作られた同じタイプのシステム間、及び同じ又は異なる製造業者によって作られた異なるタイプのシステム間でX線イメージングシステムを相関させるために、前及び後処理アルゴリズムおよびモデルが開発される。
<トレーサビリティ>
測定値がどうであるべきかの基準を設定するために、線源及び検出器及びハードウェアのセットを含む参照X線測定システムが使用されてもよい。このような参照X線システム又は標準X線システムは、最も頻繁に利用可能になる別のX線標準と比較されてもよく、異なるタイプのサンプルの測定を行うため、及び/又は定量分析モデル及びアルゴリズムをより機能的、及び/又は正確、及び/又は精密、及び/又は追跡可能に確立するために、このような参照X線システム又は標準X線システムを広く採用及び使用することができる。
測定値がどうであるべきかの基準を設定するために、線源及び検出器及びハードウェアのセットを含む参照X線測定システムが使用されてもよい。このような参照X線システム又は標準X線システムは、最も頻繁に利用可能になる別のX線標準と比較されてもよく、異なるタイプのサンプルの測定を行うため、及び/又は定量分析モデル及びアルゴリズムをより機能的、及び/又は正確、及び/又は精密、及び/又は追跡可能に確立するために、このような参照X線システム又は標準X線システムを広く採用及び使用することができる。
このようなトレーサビリティは、標準X線システムまたは参照X線システムで確立され、校正、ノイズ除去、データ補正が事前および事後の処理手順で行われることがある。この処理は、NISTにおける温度測定または時間測定と同様である。
このようなトレーサビリティ、及び/又は標準化は、データ及び/又はイメージ処理(正規化、ノイズ除去、及び他の前述のPCP及びPRP処理)、並びにデータ及びイメージ処理の前又は後、並びにデータ及びイメージ処理中の散乱除去、並びにイメージ構築、並びに材料分解、並びに定量分析、並びに流体力学と組み合わせることにより、メーカーやビルダーに依存しない多種類のX線イメージングシステム及びハイブリッドシステムにわたる診断、イメージガイド、モニタリング、検査及びテスト及びトラッキング用の十分に準備したデータセットでAI及び深層学習アルゴリズムを訓練できる可能性がある。
定量的イメージングのための前処理及び/又は正規化方法は、以下の1つ又は複数を含むことができる。
同時刻及び/又は一回又は複数の時間間隔での多数のピクセルに関する白イメージ測定の偏差、または設定された撮影と計測のシーケンスで、実際の計測と同様に、例えばX線エネルギーレベルをHign、Low、Mediumレベルでパルス計測し、同じまたは同様のエネルギーレベルで各ピクセルの平均値または平均値からの平均偏差を求めることができる。
ROIより下流の測定X線データ及び入力X線データが既知の場合、任意の特定のX線システムに対するプロットの補間は、X線システムと、例えば、材料分解のための非線形マルチエネルギー方程式の解が逆エネルギー応答関数システムルックアップテーブルを通じて確立されるエネルギー応答関数方程式システムなどを確立するためにそのような標準システムが使用されてきた標準X線システムの間の定量的関係に基づいて測定偏差の調整に基づくことができる。場合によっては、相関は、ほぼ同じサンプル標準を用いた検出器又は検出器の各ピクセルに対するX線源及び検出器の組の測定を通じて達成されることがある。
ROIが検出器の視野より小さい場合、ROIの強度範囲は、イメージ全体の強度範囲より小さくなることがある。したがって、場合によっては、ROI内の測定値のみを正規化することが好ましい。
補間法を用いた空間領域での散乱除去の場合、ROIよりわずかに大きい領域で散乱除去を行うことができる。例えば、ROIが15mm2と非常に小さい場合、約2cm2以上の領域で散乱除去を行うことができる。
強度レベルの正規化または低減は、多くの場合、同時に実行することができる。
一例では、強度レベルの数は、範囲(0,...,2k-1)に減少される。この手順は、以下の式で記述することができる。
Inorm(x,y)= { 2k-1 N(x,y) >2k-1の場合
{N(x,y) 0≦N(x,y) ≦2k-1の場合
{ 0 0< N(x,y) の場合
ここで
N(x,y)=round_to_int (((I(x,y)-minnorm) )/ (maxnorm-minnorm))(2k-1)))
Inorm(x,y)= { 2k-1 N(x,y) >2k-1の場合
{N(x,y) 0≦N(x,y) ≦2k-1の場合
{ 0 0< N(x,y) の場合
ここで
N(x,y)=round_to_int (((I(x,y)-minnorm) )/ (maxnorm-minnorm))(2k-1)))
minnorm は正規化された最小値である。
maxnormは正規化された最大値である。
kは正規化後の1ピクセルあたりのイメージビット数である。
イメージ正規化技術または方法例は、例えば以下のうちの1つである。
min-max-このタイプの正規化で、式(1)からのminnorとmaxnormは、ヒストグラムから直接取られた最小と最大の強さである。
1 %-99 %-このような正規化では、C = arg(累積ヒストグラム = 1%)および maxnorm=arg(累積ヒストグラム=99%)である。
このタイプの正規化は、例えば、限定された数の外れ値を有する範囲均一な強度分布に有用であるはずである。そのような外れ値は、イメージングセンサのデッドピクセルまたはスプリアスノイズによって引き起こされることが非常に多い。
±3σ-この正規化のための強度の範囲は、次のように定義することができる。
minnorm = μ - 3 σ
および
maxnorm = μ + 3 σ
minnorm = μ - 3 σ
および
maxnorm = μ + 3 σ
ここで、μは平均強度であり、σはROIにおけるイメージ強度の標準偏差である。このような正規化は、テクスチャの強度ヒストグラムがガウス分布に近い場合に有効である。
イメージ化されたサンプルがイメージ全体を占めていない場合、デジタルプログラムまたはユーザーは、組織の領域を自動的に検出するオプションを含むため、イメージの無関係な領域のイメージ処理または正規化を回避することができる。この機能は、ROIの相対的な大きさが劇的に変化する場合に特に重要である。自動検出オプションは、主成分分析(PCA)に基づき、ガウス混合期待値最大化(E.M.)アルゴリズムまたはK メカニズム・クラスタリングを適用してROIに属するピクセルを検出する。このステップでは、イメージ全体の境界線に起因する可能性のある正規化アーチファクトを最小限に抑え、イメージ全体の組織の大きさの変化を考慮する。
AIを診断や治療手技の支援に大規模に取り入れる際の障壁の1つは、同一メーカーまたは異なるメーカーによるX線装置や撮影方法のばらつきによる標準測定値の欠如である。
X線イメージング方法及び装置は、正規化、校正、X線システム間の相関、1%未満に除去された散乱、場合によっては一次比率(SPR)、及び同様に時間領域における点1D、2Dから3D及び6Dへの3D断層撮影及び/又はスペクトルイメージングのための本開示の方法に基づいて、複数のX線イメージングシステムにわたる標準化イメージングシステムを生成しうる。選択されたサンプル標準の測定は、対象のROIを測定するために使用されるX線システムをX線イメージングシステム標準に相関させる。本開示の方法及び装置によって生成されたイメージは、AIアルゴリズム、特に、形状及びパターンなどの視覚的パラメータに加えて密度、時間及び他の重要な定量的測定の使用を含むAI方法を訓練して、診断、検査、イメージ誘導手術又は医療処置、及び/又は治療処置の送達のために関心領域又は対象を特定、特徴付け、監視及び追跡及び選択するために使用することが可能である。X線イメージングに基づく人工知能は、開示された一連の標準化手法を採用することで、より広く利用される可能性がある。
イメージ化されたサンプルがイメージ全体を占めない場合、デジタルプログラムまたはユーザーは、組織の領域を自動的に検出するオプションを含み、これによりイメージの無関係な領域のイメージ処理または正規化を回避することができる。この機能は、ROIの相対的な大きさが劇的に変化する場合に特に重要である。
例えば、自動検出オプションは、主成分分析(PCA)に基づき、その後、ガウス混合期待値最大化(E.M.)アルゴリズムの適用又はKメカニズム・クラスタリングのいずれかに基づいて、ROIに属するピクセルを検出するものである。このステップにより、イメージの境界によるアーチファクトの可能性を最小限に抑え、イメージ全体の組織サイズの変化を考慮することができる。
<イメージ取得前及びイメージ取得後の処理-ノイズ除去>
検出器から来るイメージのノイズを除去するために、例えば、ダークノイズの測定、またはホワイトイメージまたはゲインキャリブレーション、フラットフィールド、検出器の整合性は、各測定の前またはシーケンスとタイミングと選択した関心体積に関して実際の測定と同様の手順全体を通して行うことができる。
検出器から来るイメージのノイズを除去するために、例えば、ダークノイズの測定、またはホワイトイメージまたはゲインキャリブレーション、フラットフィールド、検出器の整合性は、各測定の前またはシーケンスとタイミングと選択した関心体積に関して実際の測定と同様の手順全体を通して行うことができる。
あるいは、イメージング方法に基づいて、例えばデュアル又はマルチエネルギーイメージング、イメージ追跡又は断層撮影イメージングにおいて、イメージングされた対象の実際の測定に先立って、異なるイメージ又はノイズ測定値のセットを撮影し記録することができる。
ノイズ除去処理は、イメージ化された対象の測定値に対応するセットの対象を要することなく、より多くのノイズ測定値のセット及び/又は補正アルゴリズムを選択することができる。ソフトウェアは、各測定に対してノイズを計算し、除去することができる。
例えば、スペクトル3Dイメージでは、イメージ化された対象について、複数のエネルギーX線イメージが複数の位置で撮影される。各エネルギーレベルにおける測定値の総数は、数百又は数千であってよく、複数のイメージで各エネルギーレベルにおいてノイズが測定される。場合によっては、数百または数千の測定値が撮影され、イメージ対象の測定前に、同じ撮影条件下でノイズを除去または低減するアルゴリズムが適用されることがある。イメージ処理では、イメージ対象の関心領域の行われた測定について、ノイズを除去するために、各エネルギーレベルに係る対応するノイズ補正値で、イメージ対象の測定が処理される。
同じ又は類似のファントム又はファントム又は既知のサンプルの測定値に基づき互いに関連して、異なるX線システム、または同じタイプのX線システム、及び/又は同じ構成のX線システムであって、異なる製造業者からの様々な構成要素を有するX線システムを定量的に相関させるためのデータベースを確立することが必要になるかもしれない。
X線システムのデータベースは、1つ以上の指定されたファントム又はサンプルの実際の測定値を互いに関連付ける、X線システム内の異なるハードウェア要素の詳細なリストを含んでもよい。指定されたイメージング手順による異なるX線システムの結果のトレーニング及び比較のために定量的な測定及び導出が達成されるように、前処理及び/又は後処理のためのデータ処理アルゴリズム、方法及び手順、並びに処理中のデータアルゴリズム及び方法、を適切な時期に実行してもよい。
<散乱光除去、ビーム粒子ストッパー配列>
現在、ビーム粒子ストッパー配列またはコリメータ選択一次イメージ法のいずれかを用いて散乱を除去し、高解像度一次イメージを取得するためには、2回の露光が必要である。
現在、ビーム粒子ストッパー配列またはコリメータ選択一次イメージ法のいずれかを用いて散乱を除去し、高解像度一次イメージを取得するためには、2回の露光が必要である。
「ビーム粒子ストッパー」プレートは、「ビーム粒子ストッパー」プレートまたはビームストップ粒子プレートと呼ばれることもある。「ビーム粒子ストッパー」は、検出器で測定される信号に対応する、散乱X線のみを捕捉する分散領域を有するように、分散位置で一次X線を減衰させる。
ビーム粒子ストッパーの選択された形状及びサイズは、例えば、X線源が断層撮影のためにx,y平面内の異なる位置に移動するとき、又は対象及び/又は検出器に対して複数の空間位置から対象を照射する2以上のX線があるとき、X線の減衰が全ての方向からほぼ一貫するようにすることができる。例えば、X線を最も減衰させ、ほぼ同じレベルのX線を減衰させるボールを通る中心軸または体積が常に存在するように、球形状またはボール形状を利用することができる。
また、このようなビーム粒子ストッパーは、少なくとも2つ以上のエネルギーレベルの減衰を可能にする材料で設計されてもよく、例えば、99.99%で設計されてもよい。
そして、収集されたX線放出位置に対するビームストッパー粒子の影は、X線管の中心軸の位置またはX線源によって放出されるコーンビームを導き出すために利用され得る。
ビーム粒子ストッパーに関して図29に示すように、検出モジュールは、複数の要素、例えば、対象2より下流でビーム粒子ストッパープレート100より上流の検出器29と、ビーム粒子ストッパー板100より下流の別の検出器22を含んでもよい。検出器29は、低エネルギーのX線を収集するものであってもよいし、検出器22と比較して高解像度のものであってもよい。そして、第1検出器29と第2検出器22のX線測定により、29と22の複数の位置または分散した位置または領域が定量的に相関していてもよい。定量的な関係は、検出器29及び検出器22上の空間的なX線射出経路と、X線ビームのシングルエネルギー、又はデュアルエネルギー又はマルチエネルギーレベルにおける、単一又は複数の材料タイプ及び特定の密度及び厚さを有する各材料の既知の密度及び組成の物質の測定によって確立されてもよい。
この設計により、散乱除去だけでなく、図9に示すように、前方検出器29と後方検出器22の両方における一次X線測定の高分解能化が可能となる。
例えば、ビーム粒子ストッパーを用いた後方検出器でのX線測定では、分布位置(l,m)で後方検出器上の低解像度散乱測定が可能となり、低解像度散乱測定値の補間により、後方検出器上の高解像度散乱信号を生じ、後方検出器上の組成イメージから高解像度後方検出器散乱イメージを減算(ビーム粒子ストッパ影領域を除く)後、高解像度一次測定が実現される。
図9は、SPR1%未満またはSPR5%未満に散乱を除去するために1回の露光でデュアルまたはマルチ検出器構成およびビーム粒子ストッパー配列の散乱除去装置と方法の例を示す。
図9は、高分解能前方検出法の一例を示す図である。対象2とビーム粒子ストッパー板、またはビーム粒子ストッパー板100、またはビーム吸収板の間には、対象用のX線透光性テーブルがある。透光性テーブルと板100の間には、検出器29が配置されている。検出器29は、例えば、より高い解像度のピクセル要素を有するか、より高いフレームレート測定を行うか、または光子計数センサーであってもよいし、エネルギー感受性の検出器であってもよい。あるいは、中間層にコリメータを有するデュアル検出器アセンブリの場合、検出器29は、後方検出器22の上に直接積層されてもよい。後方検出器22は、エネルギー感応計測であってもよいし、光子計数検出器であってもよいし、低分解能検出器であってもよい。このような検出器29の選択された領域上の一次信号と、検出器22上の対応する位置上の一次信号との間の定量的関係が導出されれば、検出器29上の選択された領域における一次信号+散乱信号の合成信号を、これらの領域における検出器29上の算出した一次信号から減算することによって、検出器29上の低解像度散乱イメージを取得することができる。そして、検出器29上の低解像度の散乱を補間することにより、高解像度の散乱を得ることができる。そして、検出器29上の最終的な高解像度一次信号は、一次信号と散乱信号の両方を含む検出器29上で測定された高解像度合成信号から検出器29の高解像度散乱信号を減算することによって得ることができる。検出器29は、検出器22と比較して、フォームファクタが小さくてもよい。検出器29は、検出器22によって第1のイメージが撮影された後に、対象の関心領域を通過するX線を撮影するために、検出器22と平行な平面上のリニアアクチュエータ又は2軸アクチュエータ210などの移動体によってある位置に移動されてもよい。
検出器22は、併進ステージ、又は1軸又は2軸の併進ステージ又は多軸ステージあるいはアクチュエータによって移動可能な機械的固定具上に置かれてもよく、この固定具は長手方向に移動して、時にはプレート100、又はいくつかの例では、前方検出器が対象2から離れるように、検出器22とデュアル検出器及びコリメータアセンブリを移動させてもよい。検出器22とプレート100との間の距離は、僅かなインチであってもよい。そして、散乱除去のために設計されたデュアル検出器アセンブリのために、プレート100と検出器29との間、又は検出器29と検出器22との間にスペーサがあってもなくてもよい。
図6に見られるように、いくつかの実施例では、追加の1つ以上のX線源及び検出器の組、線源13及び対応する検出器27は、線源12及び検出器22の組のそれと同じ平面に配置されてもよい。及びX線源13は、例えばVOIの厚さを導き出すために、又はVOIの内部にあるものの異なる透視図を持つために、例えば投影経路内に骨又は金属物体がない軟組織のみの領域を見るために、斜めの角度からVOIを見るために元のX線源12及び検出器22ペアの中心軸から最大90°まで配置されても良い。X線源13は対象を照射し、線粒子ストッパープレート100- 2を通過して検出器27に到達することができる。
このようなセットアップは、イメージ取得の速度を増加させ、又は対象の別の幾何学的情報を与え、又は対象の特定の関心領域へのアクセス性を増加させることができる。そのような追加のX線源及び検出器は、解像度、イメージ取得速度、焦点サイズ、移動度、フォームファクタ、又はスペクトル波長又はエネルギーレベルなど、線源12及び検出器22のペアと異なる又は同じパラメータ値を有することができる。セットアップは、追加のハードウェア部分または追加のX線光学、あるいは上記のすべての2つ以上の組み合わせを含むことができる。
あるいは、1つのX線源を共有しながら、互いに様々な角度で配置された2つ以上の検出器があってもよい。
1つの検出器によって取得されたデータは、第2または他の検出器のデータ取得処理および方法を導き、逆もまた同様である。あるいは、データ解析のために、すべての検出器からのX線測定値とイメージセットの合計が必要である。
これは、1つの単一の断層撮影イメージを再構成するために、複数の位置からの角度を変えた投射イメージを提供し、組み合わせたイメージを提供することによって、異なる検出器が多次元イメージ再構成に使用される先行技術のX線断層撮影構成と異なるものである。本開示では、各X線源は、X線断層撮影測定が可能であり、測定、特に高速取得を確実にするためのスペクトル測定を組み合わせるために、又は多次元の測定のために、異なる空間位置に複数の線源が存在する。複数のX線源を同時に動かして、必要な測定回数を組み合わせるなどして、断層撮影の速度を向上させることもできる。従来の断層撮影法又はトモシンセシス法との違いは、あるX線源又は放出位置のX線源及び検出器の組の中心軸が、X線源及び検出器のROI及び中心軸に対して、別のX線源のそれと、例えば10度又は5度又は4度又は3度又は2度又は1度未満で近いことが好ましいということである。
別の違いは、X線ビーム粒子ストッパーによって減衰されるX線ビームによって照射される対象の領域によってイメージデータのギャップが存在する場合、ビーム粒子ストッパープレート100の使用におけるものである。別の検出器又は別の角度のX線源及び検出器のセットを別の角度で見ることによって欠落したデータ情報を捕捉させることにより、特に例えば、特定の成分、例えば、疾患組織又は造影標識腫瘍又は幹細胞の位置における存在についての走査において、全てではないにしても少なくともいくつかの欠落データを取得することが可能である。一部の少量の領域が欠落している場合、第2のデータ集合は、欠落している情報に寄与する領域のデータを同時に取得することができ、それによってシステム動作要件を低減し、データ型の柔軟性と追加型の情報が取得される可能性を増大することができる。
図41~図45は、分布領域にビーム粒子ストッパーを有するビーム粒子ストッパープレートの例を示している。ビーム粒子ストッパーは、X線透過性材料のプレート上又はプレート内に埋め込まれるか又は配置されるX線を減衰させ得る材料であり、X線測定が行われる際にビーム粒子ストッパーをある位置に配置するための剛性構造であってよい。
そのようなプレートは、ビーム粒子ストッパーが空間内の異なる位置にあることができるように、機械的、電気的又は電磁気的又は磁気的に移動するか、又はエネルギー源によって駆動されて1D又は2D及び3D次元で移動することができる。
X線ビームを遮断するために空間内の様々な位置にある各ビーム粒子ストッパーでX線測定を行うことができるように、各ビーム粒子ストッパーは、モータ又は電磁操向器(steerer)によって機械的又は電気的又は磁気的又は電磁的に駆動されるなど、プレート内で移動してもよい。
ビーム粒子ストッパーは、散乱除去のためにビームをブロックするために利用されてもよいし、X線ビームエネルギをフィルタリングするために利用されてもよいし、対象と線源及び検出器の間に配置されてもよいので放射線を低減するために利用されてもよい。他の光学部品及びX線光学部品は、X線又はX線から変換された光学光をさらに操作するため、又は操向するため、又はフィルタリングするためにビーム経路の任意の場所に配置されてもよい。
図39は、1つ又は2つの回転モータ又は可動ギアを有する回転ディスクを含むビーム粒子ストッパーの設計を示している。100sはビーム粒子ストッパープレートを移動させるための回転ギアであり、100cは回転の中心である。
図40は、1つの回転モータまたは可動ギアを有する回転ディスクを含むビーム粒子ストッパモータ設計の移動方法の一例を示す図である。100 Rはビーム粒子ストッパープレートを回転させるための可動回転ギアである。100 cは、回転の中心である。ビーム粒子ストッパープレート100は、100Rで中心の周りに約0~360度回転することができる。
図9を引き続き参照すると、前方検出器29上の(i',j')は、X線放出位置の照射経路を考えると、後方検出器上の(i,j)に対応する。(i,j)は分布位置であり、後方検出器22と前方検出器29の両方に分布する100~10,000箇所であってもよい。また、ビーム粒子ストッパーの大きさは、0.5mm~10mm程度であってもよい。後方検出器22上のX線測定は、後方検出器上のビーム粒子ストッパーの各々に対応する影領域(l,m)以外の全ての領域上の一次X線測定を生じさせるために、前方検出器29及びビーム粒子ストッパープレート100による測定値を除去してよい。(i,j)は、後方検出器22上のビーム粒子ストッパーの影の外側の領域から選択される。後方検出器22上の各(i,j)と前方検出器29上の対応する(I ' ,j ' )との間に定量的関係が確立されるとすぐに、後方検出器からの一次X線信号(i,j)から(i',j')における一次X線測定値を導出することが可能である。i' j' )におけるC合成測定値は、前方検出器29上の直接測定値から導出することができる。
Cfl(I’, j’) - Pfl(I’j’) = Sfl (I’,j’) (1)
Cfl(I’, j’) - Pfl(I’j’) = Sfl (I’,j’) (1)
これは、前方検出器29上の低解像度散乱信号である。前方検出器29上の低散乱信号の補間は、高解像度散乱イメージを生じさせる。C合成測定から検出器29上の高解像度散乱イメージを減算すると、前方検出器29上の高解像度一次X線イメージになる。したがって、1回のX線照射で、前方検出器29と後方検出器22の2つの高解像度一次測定値が同時に取得され、導出される。
低解像度濃度計は、陽極ターゲットを回転させることによって生成されたX線細線ビームを利用することによって、又は、線源12から下流であるがイメージ対象2の上流であり、それぞれが完全又は部分的透過性領域を含む1又は複数の葉(leaves)を有する光学コリメータを用いることによって作成することが可能である。各葉は、ある密度の様々な分布した透過性領域を有することができる。それによって、ビーム粒子ストッパープレートを使用する代わりに、X線細線ビームが生成され、変調される。特定の葉は、解像度、放射レベル、及び選択された関心領域を制限することができる。
このような機能は、特定のアノードデザインによって可能になる場合がある。
X線細線ビームはまた、前述のPCT出願に記載されているように、システムを較正し、散乱を除去するために利用される可能性がある。このようなシステムは、例えば、異なるエネルギーレベル又は異なる解像度又は異なるイメージング速度を含む関連する測定のために、積層検出器などの1つ又は複数の層の検出機構で動作することができる。
様々な散乱体除去装置やソフトウェアを利用することが可能である。例えば、前方検出器と後方検出器を備え、その間にビームセレクタを挟んだ実装が挙げられる。そのような構成の例は、米国特許第5,648,997号、第5,771,269号、及び第6,052,433号、並びにPCT国際特許出願番号PCT/US2019/044226、PCT/US2019/014391、PCT/US2019/022820に記載され、それらの各全体が本書において参照により組み込まれ、本開示の一部とみなされるべきものである。そのような設計は、様々なX線源の構成と組み合わせることができる。追加で、別個のX線源及び検出器を有する追加のX線アセンブリは、X線検出器が、第1のイメージ又は第1のイメージセットがデュアル検出器アセンブリによって撮影された後に選択された関心領域をイメージ化するために移動されてもよいところで利用されてもよい。
本システムの一実施例では、対象を照射するビーム経路で欠落したイメージングデータを取得する。この欠落は、ビーム粒子ストッパープレート100内のビーム粒子ストッパーによって減衰するためである。各イメージを撮影した後に、ビーム粒子ストッパープレートを含むプレートは移動される。例えば、あるエネルギーレベルで撮影された各イメージの後に、プレートをxy平面内で移動させると、別のエネルギーレベルで別のイメージが撮影される。その結果、最初のエネルギーレベルとは異なるエネルギーレベルでのX線測定により、データギャップが生じる場合がある。あるいは、2つのイメージを同じエネルギーレベルで、xy平面上の異なるビーム粒子ストッパープレート位置でそれぞれ撮影することができ、各位置は、ビーム粒子ストッパー1つ分の寸法程度、またはその何倍かだけ他とは異なる、または離れた位置にあることがある。図10は、データ置換方法の一例を示すフローダイヤグラムである。
<ビーム粒子ストッパープレート、またはビーム粒子ストッパープレートあるいはビーム粒子吸収板を用いた断層撮影方法におけるデータギャップ>
或るトラッキングおよび密度測定アプリケーションでは、データギャップが無視されることがある。
或るトラッキングおよび密度測定アプリケーションでは、データギャップが無視されることがある。
高解像度診断アプリケーションでは、X線源をビーム粒子ストッパープレートに対して相対的に移動させた後、異なるビーム粒子ストッパー位置で測定を繰り返すこともでき、逆もまた然りである。
リアルタイム散乱除去は、ビーム粒子ストッパーの下流に1つの検出器でイメージングするためのビーム粒子ストッパープレートを使用することができ、1つのX線放出位置と1ビーム粒子ストッパーレート位置で1イメージを測定されるか、またはリアルタイム散乱除去はビーム粒子ストッパーを中間に挟みながら2検出器で同時に各X線放出位置につき1度で測定でき、定量分析、断層撮影、スペクトルイメージ、CTと同等以上の分解能で低い放射線と高速イメージ取得ができることがある。場合によっては、必要とされる解像度は、CTスキャナが提供する解像度よりも低くてもよい。本開示は、限られた数の測定位置を選択するか、又はROI又はROI内の成分及び/若しくは物質を再構成及び/若しくは追跡するために必要なイメージの数を減らすかのいずれかによる撮影の過程で放射線を最小限に抑えることができるように、解像度ターゲットを調整することができる。
以下の方法及び装置を利用することが可能である。
ROIの第1イメージが1つのX線源及びその対応する検出器を用いて取得された後、第2のX線源は、対象物のほとんどの領域に到達するX線、特にビーム粒子ストッパープレート内のビーム粒子によって遮断される対象物の領域からのX線を遮断するコリメータを照らしてもよい。例えば、そのようなビーム粒子ストッパーの各々は、0.1mm~10mmの寸法であってよい。第1の線源から来るX線は、ビーム粒子ストッパープレートに起因して、X線によって照らされる対象内の体積領域又は複数の体積領域からの投射信号を生成しない場合がある。第2のX線源は、そのような体積Vを照らし、第1のX線とは異なるように設計された放出位置により、第2の線源からのX線は欠落したデータギャップを有するVOIを照らし、該データギャップはビーム粒子ストッパーによって生じ、検出器に到達して収集される場合がある。
代替的な構成は、ビーム粒子ブロック板を異なる位置に移動させ、または、第1の位置と重ならない第2の位置に移動させ、第1の線源によって生成された第1のイメージが作成された後、欠落したデータギャップが第2の位置における第1の線源の第2のイメージによって提供され得るようにする。
場合によっては、ビーム粒子ストッパープレートは、参照位置、又はホームポジションに移動され、その後、第1の位置へ移動される。イメージが撮影された後、それは第2の位置に移動され、第2のイメージが撮影される。
場合によっては、ある露出時間の第1のイメージ+ある露出時間の第2のイメージは、さらなるイメージ処理のために視覚化又は定量的測定に必要な十分な露出を有する完全なイメージを提供することができる。
ビーム粒子ストッパープレート100は、線源から来るX線に対してほぼ等しい寸法の透明領域と不透明領域とを有するように設計されてもよい。各透明領域又は各不透明領域の寸法だけプレートが移動すると、完全なデータセットが取得される。プレート100は、線源及び検出器の間に配置されてもよいし、対象と検出器の間に配置されてもよい。
完全な多次元イメージを導出するために、対象は、距離または少なくとも2次元以上の次元で第1の線源に関連し、これにより、対象を通過する第1のX線源によって第1のイメージが撮影して生成されるとき、プレート100内のビーム粒子ストッパーに起因するいくつかのイメージデータギャップが存在する可能性がある。対象が移動するにつれて、対象2の2次元または多次元または3次元イメージの構築に必要なデータセットを完成するため、測定値でデータギャップを埋めるため、追加のイメージ、または少なくとも追加的にもう1つのイメージまたはX線測定が撮られる。
図1~4に示されるように、少なくとも2つのX線源が利用される可能性がある。時には、各線源は、関心領域を照射することができる放出位置に出入りし、投射された信号が第1検出器によって捕捉されることもある。このような光源は、複数のエネルギー源であってもよいし、単一のエネルギー源であってもよいし、準単色光源であってもよい。このような光源は、異なるエネルギーレベルであってもよい。例えば、第1の1つの線源は40~150KeVであってよく、第2の線源は20~40Kevであってよい。
X線源を放出位置または放出位置の内外に移動させる移動体は、回転するタレットまたはリニアステージ、または2次元ステージまたは3次元以上のステージ、回転移動ステージであってよい。あるいは、このようなX線源は、電子ビームを、例えば、電子ビーム偏向を介して、例えば、一組の電気光学レンズによって、場合によっては、磁性板またはソレノイドコイルを用いるような電磁または磁気方法によって操向することによって、放出位置に出入りするように調節される。
図5~8において、図示された例では、ここに開示されたX線イメージングシステム及び装置は、線源又は関心体積又はイメージング対象に対して第1検出器の下流又は上流に、第2検出器又は検出器と呼ばれることもある2つ以上の検出器を含むことが可能である。
さらに、図9を引き続き参照すると、第2又は第3又は第4検出器は、線源が関心領域を照明し得る放出位置の内外に移動されてもよい。測定は、アプリケーションの必要性に基づいて行われてもよい。そのような検出器は、ステージに取り付けられてもよく、手動またはモータ駆動で、第1検出器22の下流または上流の各象限に到達するように回転されてもよい。各象限において、1または複数の検出器は、象限内で線形、又は2次元又は多次元の併進ステージとともに移動してもよい。そのような検出器は、散乱除去装置なしでもよく、または、VOIの下流または上流のビーム粒子ストッパープレート100と共に利用されてもよい。そのような検出器は、第1検出器がVOIの照射経路から移動された後、第1検出器の位置に移動されてもよい。場合によっては、第2又は第3検出器が利用される可能性がある場合、各検出器は、前述のPCT出願に記載されているように、2つの検出器の間に挟まれたビームセレクタを含んでもよい。
<スペクトルX線測定のための散乱除去>
定量的なスペクトルイメージ又は断層撮影のための散乱除去は、5%未満のSPR又は1%未満のSPRがある場合に行われてもよい。
定量的なスペクトルイメージ又は断層撮影のための散乱除去は、5%未満のSPR又は1%未満のSPRがある場合に行われてもよい。
各X線測定は、時間領域法を用いた「飛行時間」のような散乱除去処理を用いてイメージ処理方法を経ることができる。例えば、超高速線源又はピコ秒線源を使用して、異なる時間窓内で一次X線を捕捉する。または周波数領域における一次変調器ベースの散乱除去が利用されるか、または散乱除去は、それぞれビーム粒子ストッパープレート、またはビーム粒子ストッパー配列プレート、またはビームセレクタを伴う散乱のみまたは一次X線のみの選択的空間測定に基づくものであってもよい。
ビーム粒子ストッパー又はビーム粒子ストッパー配列又はビーム粒子ストッパープレート(BPSP)又はビームストッパー粒子プレートは、全て、例えばポリマー材料を含む一般に軽量かつ剛性構造プレートであるX線透過性プレートに埋め込まれた分散したX線減衰要素を有するハードウェアプレートを指す。場合によっては、かかる要素又はかかる要素の一部は、複数のエネルギーでX線を減衰させることができる複数の異なる及び/又は同じ減衰材料を混合することによって、及び/又は十分な厚さを有することによって、典型的には1又は複数のX線スペクトルエネルギーで、X線をほぼ完全に減衰させることができる。減衰特性は、MEMデバイスのように各要素を配向させる変調器を利用することによって調整されてもよく、また、超音波や水晶などの変調器や波長可変グレーチングシステムを利用することによって調整することが可能である場合もある。一次X線の減衰によって生じる欠落したデータギャップが、BPSPの同じX線放出位置及び/又は異なるX線放出位置における別の取得イベントから回復及び/又は抽出されるように、データ取得間で各要素及び/又はBPSPは、機械又はモータ駆動装置によって移動されてもよい。データギャップの回復は、異なるBPSPの位置で異なるエネルギーレベルのX線イメージを取得することによっても達成され得る。
いくつかのアプリケーションでは、断層撮影のために、またはBPSPを使用するほぼ完全な断層撮影のために、1%未満または5%未満のX線散乱除去のための、SPR X線減衰は、1つのX線放出位置およびBPSPの1位置において1回だけ測定されてもよい。完全な3Dイメージを再構成するために取得される必要がある投射2Dイメージの総数をTjで表すことができる。欠落したデータは、他のBPSPの位置における測定データの補間又は抽出によって、補完されてもよい。欠落データのない又は少ない完全な3Dイメージを再構成するために取得される必要がある投射2Dイメージの総数は、およそ≧2Tjであってよい。BPSPの使用によるデータの欠落は、同じX線放出位置の検出器上の投射イメージの異なる位置でX線が減衰する別の位置にBPSPを移動することによって補完されてもよいし、X線放出位置を移動すると同時に別の位置にBPSPを移動することによっても補完されてもよい。後者の場合、断層撮影のためにX線測定の総数を増加させることができるが、典型的には、ほぼ完全に再構成された断層撮影イメージの各BPSP位置における測定の総数に等しい2×Tj以下とする。例えば、BPSPの4つの可能な異なる位置がある場合、各位置において、各位置における減衰した一次X線は、他の位置のいずれとも重ならないようにする。4つの位置のうち3つの位置で3枚のX線イメージを撮影すると、各位置で、Tj/3枚のイメージが撮影される。その場合、VOIの完全な断層像を、データギャップがない、または実質的にない状態で再構成するために取得する必要があるイメージの総数は、約((4*Tj)/3)である。第4の投影セットは、第1~第3の投影セットによって進むのと同じ2D領域におけるX線放出位置で撮影されてもよい。第4の投射セットは、第1~第3の投影セットとは異なる投影位置でX線放出位置を撮影してもよい。この第4の投射セットは、第1~第3の投射セットにおけるX線放出位置の移動に伴ってROIの外側に導入される新たな未知のボクセルを解決するために利用されてもよい。
例えば、図1に示すように、対象(本開示を通じて「物体」とも呼ばれる)2は、1または複数の線源から下流にあり、対象2を支持するためのハードウェア固定具によって支持されているサンプルホルダ40が存在し得る。
図1に示すように、少なくとも2つの線源があり、第1の線源と呼ぶことができる1つの線源がX線を発生し、対象を照射し、X線は1または複数のビーム粒子ストッパーまたはビーム粒子ストッパー配列100を含み分散領域を有する板を通過する。各粒子は、特定の用途に適した形状、例えば、複数の方向から来るX線の減衰に適した球形又は球形(図41~44に示すような)を有していてもよく、非減衰X線ビームは検出器22に到達し、検出器22で収集され記録される。
現在のビームストッパプレートは、本開示で提示されるものとは異なるジオメトリの減衰領域、例えばディスクを有することができる。現在のビームストッパー配列は、X線源、ビームストッパー配列及び/又は検出器間の比較的固定されたジオメトリのために特に設計されている。しかしながら、このような設計は、X線放出位置が移動すると、ディスクを通過する一次X線に対してディスクの各部分の減衰値が変化し、結果として一次X線の減衰が不均一になることがあるので、断層撮影方法には適さないか、又は好ましいものではない。これに対し、本開示では、1のビーム粒子ストッパーまたはビーム粒子ストッパーの各々の好ましい形状が球状であるため、X線放出位置が移動しても、一次X線ビームが完全にまたは実質的に完全に遮断される領域が必ず存在することになる。同時に、ボールの大きさと形状により、各減衰位置で一次X線の遮断領域を最小化することができる。これにより、粒子ストッパー要素で減衰することなく通過する透過X線が十分に確保される。
本開示はまた、図40に示すように、他のBPSP位置で取得されたイメージデータから欠落したデータギャップを回復又は抽出するために、ビーム粒子ストッパーが移動され得る方法について記載する。
図9及び図16で説明したように、BPSPプレートの上に積み重ねた1つの検出器があってもよく、移動体があってもなくてもよい。このような構成は、1回の単回露光で任意の1つのX線放出位置で取得されたイメージのみを使用して、全てのスペクトル測定について<1%のSPR又は<5%のSPRで、検出器が可能な最高解像度でのデータギャップのない高解像度2Dイメージの導出を可能にする。
このような方法により、データギャップのない、又は比較的小さなデータギャップのある完全な断層イメージの再構成のための最小限の数の露光が取得されるため、完全な断層撮影に要する時間を最小化することができる。
一方、従来、散乱を除去するためにビーム粒子ストッパー配列あるいはコリメータ選択一次イメージ法のいずれかを用いて高解像度一次イメージを取得するために、2回の露光が必要であった。
本開示では、検出器上で測定される信号が、散乱X線のみを捕捉する分散領域を対応して有するように、ビーム粒子ストッパーが分散した位置で一次X線を減衰させる。
ビーム粒子ストッパーの選択された形状及びサイズは、例えば、X線源が断層撮影のためにx、y平面内の異なる位置に移動するとき、又は対象及び/若しくは検出器に対して複数の空間位置から対象を照射する2つ以上のX線があるときに、全ての方向からのX線の減衰がほぼ一貫することができるようにし得る。別の例では、X線を最も減衰させ、ほぼ同じレベルのX線を減衰させるボールを通る中心軸又は体積が常に存在するように、球状又はボール状のビーム粒子ストッパーを利用することが可能である。
このようなビーム粒子ストッパーは、少なくとも2つ以上のエネルギーレベルの減衰を可能にする材料、例えば99.99%、で設計可能である。
X線放出位置に対してビームストッパー粒子の収集された影は、X線管の中心軸またはX線源が放出するコーンビームの位置を導出するために利用されることができる。
<スペクトルイメージング-ボクセルまたはボクセルのサブユニットのような、材料または測定単位のためのデータベースの確立>
1つ又は複数のエネルギーピークを有する広範なスペクトルX線のような、1つまたは複数のエネルギーでX線を使用した測定であって、1つの材料または2つ以上の材料の組み合わせの測定は、データベースに格納されることができる。
1つ又は複数のエネルギーピークを有する広範なスペクトルX線のような、1つまたは複数のエネルギーでX線を使用した測定であって、1つの材料または2つ以上の材料の組み合わせの測定は、データベースに格納されることができる。
1つの物質、1つの材料、または2つ以上の物質または材料には、1つの測定値、または1つ、2つ、またはそれ以上のエネルギーでの値の一意の組み合わせに対応する、固有の数の厚みおよび減衰係数がある。
この固有数は、さらに、ボクセル減衰の値として定義されてもよく、これは単一物質、または2つ以上の物質であり、各物質の重み付け寄与は、ボクセルのサイズをさらに小さい単位、例えば1um、100nmまたは100nMより小さい単位に縮小するころによって決定されてよく、1つのサブユニット体積の各物質の単一または複数のエネルギーの測定であり、1物質のサブユニットに関して2つ以上のサブユニットの組み合わせである。
厚みまたは減衰の妥当な精度または固有の参照値を得るには、または1以上の物質を認識するためには、多くの測定の組み合わせによる関数データベースの確立が必要となるだろう。
1つ又は複数の物質の異なるエネルギーレベルにおける1つの測定値又は測定値の組み合わせをプロットすることによって、固有の関係を確立することができる。測定される物質の数、又は要求される分解能、又は測定されるX線のエネルギーレベルに応じて、1つの物質の測定値の固有の値を異なるエネルギーレベルの1つの測定値又は測定値の組み合わせの固有の値に関連付けるプロットされた空間関係は、異なる種類の物質、厚さ、ボクセル寸法及び/又はサブユニット寸法の関心範囲内の可能な測定値の数より小さい測定数により確立されてもよい。これは、異なるエネルギーレベルでの測定に対応する各材料及び/又は2つ以上の材料の組み合わせの減衰値、サブユニット測定値又はボクセル測定値の固有の相関をプロットすることによって達成される。このような値は、導出されてもよいし、直接測定されてもよい。
プロットは、例えば、6または8または10または12、トリプルエネルギーシステムのための6×6×6または8×8×8またはマルチエネルギーシステムなどの測定数に基づいて補間されてもよく、厚さまたはボクセル減衰値またはサブユニット減衰値の予測値が、相対的に高い精度で固有の1対1関係が確立される限り決定するように導出されてもよい。例えば、より多くの可能な設定及びエネルギーレベルの組み合わせで設定されたより多くの測定値又は測定値であっても、2つの値を結びつけるために使用されるアルゴリズムは、例えば<0.05%又は<0.5%の誤差率又は偏差、又は標準偏差内でプロットから予測値とは異なる変数を提供しないであろう。
たとえ、2つの値を結びつけるために使用されるアルゴリズムが、ブラックボックス等で誘導されない場合であっても、一意の値のセットが導出され得る限り、1つまたは複数のエネルギーレベルに対応する1つの材料の測定値の任意の1つの値の関係がある限り、1つの測定値がエネルギーレベルの一意の値に対応する。
<スペクトルイメージングシステムの例>
線源は、ある実施態様では、1つ以上のエネルギーレベルでエネルギーピークを有する広スペクトル線源、又はシングルエネルギー又は単色源を有する線源であってよい。
線源は、ある実施態様では、1つ以上のエネルギーレベルでエネルギーピークを有する広スペクトル線源、又はシングルエネルギー又は単色源を有する線源であってよい。
検出器は、フラットパネル検出器またはエネルギー感応型検出器またはデュアルエネルギー積層型検出器または各隣接ピクセルと比較して異なるエネルギーレベルでエネルギー感応するピクセルのサブユニットを有する検出器であってもよい。
ユーザー又はコンピュータによって関心領域(ROI)又は関心体積(VOI)を照明するためにX線ビームの視野を制限又は拡大するためにコリメータが使用又は制御される場合がある。
より大きな視野を有する第2又は第3検出器が、検出器の前又は下流に配置されてもよい。
スペクトルイメージングは、Kエッジ(k-edge)のものを含み、又はスペクトルイメージングは、材料分解に基づくデュアル又はマルチエネルギー応答関数方程式系に基づいてもよく、ここで逆導出が補間及び関数応答方程式系に基づく。
逆一次方程式系は、各材料の密度及び/又は厚さ及びその複合値の固有の値に対応するデュアル又は複数のエネルギーにおいて、事前の測定から確立したエネルギー関数応答方程式系に基づいて、対応する物質及び材料の定量情報を導き出すことにより確立されうる。
<異なるX線エネルギーでの散乱除去>
散乱は、前方検出器上の選択された分散した位置で散乱イメージを補間して高解像度散乱イメージを導き出し、これを前方検出器上の合成イメージから減算して高解像度一次X線イメージを生成するソフトウェアプログラムを使用して除去される。
散乱は、前方検出器上の選択された分散した位置で散乱イメージを補間して高解像度散乱イメージを導き出し、これを前方検出器上の合成イメージから減算して高解像度一次X線イメージを生成するソフトウェアプログラムを使用して除去される。
単一検出器による散乱除去法は、ビーム粒子ストッパープレートを使用しても可能である。
周波数または一次変調器による散乱除去も可能である。
超高速X線源と検出器を用いた飛行時間型散乱除去も可能である。
定量的なイメージングのためには、散乱を一次X線の1%、または5%未満に低減することが好ましい。
特定の状況において、イメージングされた対象又はVOIはそれほど散乱しておらず、その場合、散乱除去ステップを省略することができる。
<較正>
従来のCTスキャナや一般的なX線イメージングにおいて、キャリブレーションは、しばしばデータのクリーンアップやノイズ除去などを表す用語として使用されることがある。しかし、定量的イメージングにおいては、一貫したデータ及び正確なデータに対する要求はより高く、多くの場合、イメージング取得前、取得中及び取得後のイメージ再構成、材料分解、濃度計、流体力学、精密運動測定、定量的イメージング解析及びAI関連の手順及び測定中に適用される処理及びアルゴリズムの数が交錯し、したがって、較正という言葉は関係するすべての処理を十分に又は正確に表現しないかもしれない。
従来のCTスキャナや一般的なX線イメージングにおいて、キャリブレーションは、しばしばデータのクリーンアップやノイズ除去などを表す用語として使用されることがある。しかし、定量的イメージングにおいては、一貫したデータ及び正確なデータに対する要求はより高く、多くの場合、イメージング取得前、取得中及び取得後のイメージ再構成、材料分解、濃度計、流体力学、精密運動測定、定量的イメージング解析及びAI関連の手順及び測定中に適用される処理及びアルゴリズムの数が交錯し、したがって、較正という言葉は関係するすべての処理を十分に又は正確に表現しないかもしれない。
これにより、PCP(前処理)およびPRP(後処理)という用語は、様々なステップを説明するために使用される。これらのステップは、較正を含むことができる。
定量的イメージング、定量的測定、定性的測定、密度測定、スペクトルイメージング又は多次元イメージング、又は3Dイメージング又は断層撮影アプリケーション、又は2Dイメージングなどのいくつかの場合において、本明細書の開示に基づく既知の較正方法など、既知の方法を使用して検出器のノイズが除去されてもよい。測定におけるノイズは、暗電流、ゲイン、ダークノイズ、白色イメージ、環境からの環境光又はX線の干渉、光学光、スプリアスノイズ、又は定量的ノイズ及び/又はフラットフィールドに影響を与える可能性がある任意の干渉又はノイズを含んでもよい。ノイズの測定又は計算は、ソフトウェア及び/又はアルゴリズムを使用して行われてもよく、場合によっては、本明細書の開示に基づく既知の較正を伴ってもよい。場合によっては、電磁波を減衰または操作するために使用されるハードウェアおよび/またはソフトウェアを含むフィルタまたはX線光学または光学または他のタイプのフィルタが使用されてもよい。場合によっては、電磁波を減衰させる、操作する、ために使用されるハードウェアおよび/またはソフトウェアを含むフィルタまたはX線光学または光学または他のタイプのフィルタが使用されてもよい。
従来のCT又は一般的なX線イメージングでは、一般にノイズ較正は頻繁に行われず、又は較正は測定が行われる直前に行われることがある。したがって、一般に較正データは一度だけ保存され、時には以前の較正を上書きする。
したがって、例えばエネルギー、速度、露光時間、ゲイン値又はオフセット及びフレーム数において同じ又は異なる設定を有する1つ以上の測定又は1つ以上の測定セットの較正データを、検出器に対するローカル又はリモートマイクロプロセッサに保存する方法を含むことが、較正に関する本開示の一部である。イメージ解析のためのイメージ処理中に、対象に対して行われた測定の種類に基づいてノイズを除去するために、1つまたは複数の、または1セットまたは複数の較正データが選択される。場合によっては、本開示で使用される較正方法及び散乱除去方法、材料分解方法、多次元イメージ化方法及び装置、1つ以上のX線光学又は光学部品又はハードウェア、又はソフトウェアは、例えば、空間、スペクトル又は周波数又は時間領域で光をフィルタリングするため、操向するため、又は操作するために追加又は削除されてよく、診断、追跡、特性化、モニタリング及び監視、検査、数値化又は可視化用のAIのそれを含むイメージング又はポジショニング、又は測定に関する他の方法と共に使用されてもよい。
デュアルエネルギー材料分解、トリプルエネルギー、またはそれ以上のエネルギースペクトルのイメージングと測定と材料分解は、流体のコントラストラベルの有無にかかわらず、密度を測定し、流体力学を特徴付けることができる。
基本原理は、実験室のX線または広帯域線源に対して、検出器による物質測定が、ある密度および厚さに対して一意になり得るということである。この微分方程式を数学的に解くことは難しく、現在の数学的手法では正確かつ満足のいく結果は得られていない。しかし、物質の密度または複合物質と、様々なエネルギーレベルにおける検出器の測定値との間には、固有の関係が存在する。この関係は、広帯域X線源による物質の散乱のない測定に基づいている。したがって、微分方程式を数学的に解こうとするのではなく、逆エネルギー応答関数方程式系と呼ばれるプロットに基づくデータベースを作成することで、異なるエネルギーレベルにおける検出器測定値と物質または物質の異なる密度を相関させることができるのである。さらに、2つ以上の物質を有する物質または材料ごとに、密度および厚さのばらつきがある場合の測定回数を測定することができる。測定回数は、補間の使用により、~5000の密度バリエーションのデータベースを確立するために、<10または<20とすることができる。プロットは、異なるエネルギーレベルでの測定と、固定または変動した厚みでの物質の変動した密度に基づき、スプライン法などの補間によって導出される。測定回数がある一定以上増えると、導出されたプロットからの予測値の精度はあまり向上せず、測定値との誤差も0.5%以下にならない。したがって、正確なデータベースやエネルギー応答関数システムを構築して、異なるエネルギーレベルにおける物質密度と検出器の測定値を相関させるためには、限られた数の測定が必要となる場合がある。例えば、トリプルエネルギー逆エネルギー関数式の確立では、各材料又は各成分は、それぞれ異なる厚さ及び/又は密度を有する5つの異なる測定サンプルを有することができる。例えば、2つの異なる物質がある場合、2つの異なるエネルギーレベル、HとLでプロットを確立するために測定される6×6種類の変動と変動の組み合わせが存在する可能性があり、3つの異なる物質がある場合、6×6×6、または合計216種類の厚みおよび/または密度の変動の組み合わせが存在する可能性がある。各組み合わせは、高エネルギー(H)、中エネルギー(M)、低エネルギー(L)、または合計216×3=648の異なる測定値で測定されるかもしれない。データベースは、逆エネルギー応答関数方程式系と呼ばれるプロットとして記載されることができ、異なる検出器は異なる応答関数を有するため、検出器と一緒に成立することがある。
場合によっては、2Dイメージングレベルで可能な限り正確な材料組成を持つことが目標でない。2以上の組織の層が交錯しているので、分解の複雑さは、単に物質の厚さ又は密度を決定するよりも遥かに大きい。むしろ、少なくとも1つの物質を残りの物質から分離し、診断、3Dイメージング及び/又は他の定量分析に必要な最小のVOIを決定するために、可能な限り最高の密度評価及び材料分解を達成することが目標になる場合がある。組織が一般に緩やかに変化するという事実のために、VOIは、異常及び標準からの逸脱を示す、又は異なる組織からなる隣接領域によって引き起こされる鋭い変化に基づいて選択されることも可能である。
いくつかの場合において、エネルギー応答関数方程式系のこのようなプロットは、1つ以上の異なる材料又は物質の厚さ又は密度を特徴付けるために設定される。
特定の空間位置における各ボクセルが様々なエネルギーとの相互作用によってさらに特徴付けられる可能性があるため、定量的測定と材料分解及び測定は、3Dイメージ再構成と測定を組み合わせることによって、より正確に行うことができる。最終的な結果は、データベースの構築のため、または様々な密度での検出器測定に基づく材料密度の逆ルックアップのため、またはプロットを生成するために補間する必要がある様々な既知の密度および厚さ成分について、異なる材料または材料の組み合わせの異なるエネルギーレベルにおける少数の測定結果に基づいて確立されたデータベースまたは逆エネルギー応答関数方程式系のためのボクセル単位または複数のボクセル単位の物質の密度測定のより正確なものである。このようなプロットは、複合材料又は個々の材料又は物質で、特定の材料又は物質又はデュアル以上の材料の組み合わせのユニーク又は明確な密度又は厚み値を有するデュアル以上のエネルギーでの検出器測定値を相関させるために拡張することができる。
<3D再構成とスペクトルイメージングと定量的イメージングのための前処理、後処理、及び/又はデータクリーンアップ>
個々のピクセル応答における固定パターン変動を補正するために、2D検出器測定が行われることがある。
個々のピクセル応答における固定パターン変動を補正するために、2D検出器測定が行われることがある。
DICOMフォーマットで、または生イメージとして記録された生データは、イメージングシステムサーバから内蔵のイメージ保存通信システム(PACS)に転送され、そこで自動イメージ処理が実行される。
ノイズ除去、散乱除去、データの正規化、材料分解又は測定材料又はROIの特性の導出、又は多次元イメージ再構成又は経時追跡、データベースの転送及び確立、他の記録とのリンク、AI、他のカメラ測定及び/又は他のモダリティの測定との相関、コロケーション、定量化、診断、イメージガイダンスなどのイメージ処理は、1又は複数のマイクロプロセッサによって行われ得る、及び/又は1以上の位置で行われ得る。
イメージ処理はまた、検出器の一部としてマイクロプロセッサで行われてもよいし、検出器にローカル又はリモートでリンクされてもよい。
DICOMフォーマットの生データ又は生イメージは、ワークステーション内のローカルストレージ又はデータベースからイメージシステムサーバ及び/又はPACSに転送されてもよく、そこで追加の自動イメージ処理が実行されてもよい。
イメージ処理もまた、イメージシステムサーバで行われてもよい。
イメージングシステムに含まれるハードウェア及びソフトウェアの内部又は外部のイベント及び活動の制御、同期化、外部通信及びトリガーは、イメージングシステムサーバ又はPACS保存装置又は電子記録システム又はユーザーの好みに基づいてそのようなタスクのために専用された場所において、ローカルに1又は複数のマイクロプロセッサ、又は1又は複数のコントローラーで行われてもよい。
例えば、イメージ処理プロセスの1つのタイプは、複数の段階又は複数のステップを含むことができる。つまり例えば、前処理又は前イメージ処理ノイズクリーンアップ、又はROIから外れる派生データなどの例外データを取り除くためのデータの正規化、又は例えばVOIに達する前に入力X線強度を検出するために追加の検出器又は基準点を使用する線源入力の較正などである。
透過性ボクセル及び減衰性ボクセルを含む体積への再構成は、1つ又は2つ又は複数のエネルギーレベルで実行することができる。
物質体積への分解は、各々が透過性ボクセル又は減衰性ボクセルのいずれかを含むように実行することができる。
前処理は、不良ピクセルの特定及び/又は除去、及び/又はフラットフィールド補正、又はゲイン、ダークノイズ、ホワイトノイズ、スプリアスノイズの処理を含むことができる。
複数の検出器セルが様々なエネルギーカウンタを含む場合、減衰体積は、重なり合う低閾値カウンタを使用して生成することができる。各ピクセル領域内には、一組のエネルギーカウンタが存在する。検出器全体は、エネルギーカウンタの繰り返される単位を含むことができる。
再構成の一例では、データを測定する重複する低閾値カウンタが同時に処理されて、測定されたスペクトルにわたって非重複エネルギービンを表す減衰体積を生成する、ビール-ランバート法則の多色形式の低解像度バージョンが使用されている。
例えば、エネルギー範囲30-120keV、45-120keV、60-120keV、78-120keVをそれぞれ表す4つの個別のカウンタは、エネルギー範囲30-45keV、45-60keV、60-78keV、78-120keVを表す4つの減衰量を同時に生成することになる。
例えば、30-45keV、45-60keV、60-78keV、78-120keVのエネルギー範囲を表すカウンタは、同時に4つの減衰体積を生成することになる。
1つのX線パルスまたは1つの露光に複数のエネルギーピークが存在する場合、エネルギーに敏感な検出器の繰り返し単位を含む検出器を使用することができる。1パルスまたは1回の露光の測定において、VOIに対して複数のエネルギー測定を行ってもよい。
代替的に、デュアル又はマルチエネルギーレベルにおける一連のシングルエネルギーX-線パルス又は露光が、1つ又は複数の検出器によって測定されてもよい。
各エネルギー測定について、未知のボクセル値は1又は0に設定されてもよく、ここで1は減衰値がエネルギーレベルに最も敏感であるボクセルであり、0は他のボクセルに割り当てられることが可能である。
ボクセルの減衰値が、様々なエネルギーレベルにおいてVOI内の各未知のボクセルに対して決定された後、ボクセルの密度及び/又は組成が導出され得る。導出プロセスは、様々なエネルギーレベルにおいて特定の減衰値範囲を有するボクセルを特定し排除する消去プロセスであり得る。このプロセスはまた、空気又は水で満たされたボクセルを特定してもよい。混合物質を有するボクセルは、様々なエネルギーにおける測定値に基づいて分離されてもよく、この測定値は、2つの組織タイプの間の界面、又は正常領域と疾患領域の界面にある可能性がある。本開示で説明した材料分解を使用して、データベース又は逆線形方程式系を確立して、導出された測定値及び各物質の値密度及び/又は厚さに関連する対応する物質及び物質の定量情報を導出してもよい。
セグメンテーションは、減衰値、閾値を用いたボクセルの線形係数、又は閾値セグメンテーションに基づいて発生してもよい。イメージデータの提示は、CT切断によって処理されてもよい。
X線放出位置の下流で、イメージ対象の上流の繰り返しユニットとして単色フィルタを使用する場合、各フィルタに対応する検出器の検出領域は、使用される特定のエネルギー範囲のX線測定値を収集することができるようになる。各繰り返しユニットは、互いに隣接して配置された、多数のフィルタを含んでもよい。例えば、フィルタは、Kエッジ(k-edge)フィルタであってもよい。場合によっては、フィルタ領域は、コード化された開口部(Coded aperture)であってもよく、それはKエッジフィルタであってもよいが、Kエッジフィルタとは異なる単色フィルタであってもよい。
別の例においては、検出器は2D検出器であり、上述した逆関数応答法が使用される。説明したように、逆関数応答法は、1つ以上のエネルギーレベル、材料密度及び厚さでの、様々な密度又は厚さレベルでの少数の測定に基づいて、検出器測定の定量的値の一意の対応関係を確立するために補間を使用する。
補間値から物質密度における検出器測定値のプロットを設定するために必要な測定回数は、実際の測定値からのプロット値の偏差により決定することができる。
例えば、多数の測定値から作成されたプロットからの偏差が0.5%未満である場合、このプロットで十分である場合がある。
測定値の数が適度に滑らかなプロットを生成できる場合、このプロットも十分である可能性がある。
再構成アルゴリズム自体は、統計的反復技法に基づいていてもよい。統計的要素は、解に近づくときに収束を遅くするために、正規化ポアソン分布によって体積への補正を重み付けすることによって導入され、それによってノイズを低減する。
再構成アルゴリズムは、最初に要求の8倍大きいボクセルを再構成する多段階アプローチを採用することもできる。次のステップでは、要求されたボクセルサイズに達するまで、これは合計4つのステージにわたって繰り返し細分化される。この手法により、再構成を比較的早く進めることができる。また、大きなボクセルは同じ値を持つ小さなボクセルの集合と同じであるため、スパース性制約の弱い形態である。最後に、ボクセルが大きければ大きいほど、投影イメージからのピクセルがイメージに寄与することになり、デッドリージョンの影響を軽減することができる。これは、デッドリージョンの影響が最も大きい初期の再構成段階で特に有効である。
<前処理>
ゲイン、暗視野、ホワイトノイズは調整または除去される。デッドピクセルは、記録され、または隣接するピクセルから補間される。デッドピクセルが多すぎる場合、イメージングを停止することができる。デッドピクセルが定義された数より少ない場合、プリプロセッサーは隣接するピクセルから補間するか、そのピクセルがデッドピクセルであることを記録することができる。デッドピクセルは、計算に使用するデータから除去される。
ゲイン、暗視野、ホワイトノイズは調整または除去される。デッドピクセルは、記録され、または隣接するピクセルから補間される。デッドピクセルが多すぎる場合、イメージングを停止することができる。デッドピクセルが定義された数より少ない場合、プリプロセッサーは隣接するピクセルから補間するか、そのピクセルがデッドピクセルであることを記録することができる。デッドピクセルは、計算に使用するデータから除去される。
Kエッジ(k-edge)コード化された開口部、またはそれぞれが異なるエネルギーレベルに使用される単色フィルタ、または単色フィルタの繰り返し単位は、ROI内の1つまたは複数の成分に対して最適化された感度のために予めKエッジまたは最適化されることが可能である。
代替として、それぞれがエネルギー選択的である複数のピクセルが、例えば、1つのピクセル領域にq個のピクセルがある2qから2つ以上のエネルギーで、q個の選択的ピクセルのそれぞれがエネルギー範囲を測定するように処理することが可能である。
ビーム粒子ストッパープレート又はビーム粒子ストッパーを用いた散乱除去方法を用いると、少なくとも1つのピクセル領域は、ビーム減衰ブロックの1つに直接対応する検出器上でブロック化される。例えば、ピクセル領域の1つのピクセルqが1つのエネルギーレベルまたは1つのエネルギー範囲の散乱のみを読み取る場合、そのピクセルq上で収集された散乱イメージまたはデータは、他のピクセル領域へ補間することができるが、他のピクセル領域の対応する位置qにおいてのみ補間することができる。
フィルタ領域の各フィルタ位置で対象を照射するために1-q個のエネルギー選択性フィルタを使用して1つのエネルギー範囲を選択的に透過させる場合、あるフィルタ領域の各フィルタに対応する検出器上の一次イメージ又は散乱イメージを使用して、同じエネルギーレベルについて対応するフィルタ位置だけであるが他のフィルタ領域の散乱イメージを導出することが可能である。
3つのエネルギーに対するスペクトルイメージングは、エネルギー関数応答逆プロットを設定するために、計算方法として3Dキュービックスプラインを使用することができ、代替として、4Dキュービックスプライン補間を使用することができる。4つのエネルギーについては、4次元または5次元のキュービックスプライン補間を使用することができ、エネルギー関数応答逆プロットを設定するために、そのような方法を使用することができる。
より正確なイメージングと測定のために、以下の手順を行うことができる。
測定前のビーム粒子ストッパー・アレイ位置の減衰領域の検証。
散乱除去処理中及び処理後の散乱イメージの検証。
一次イメージの検証。
デッドピクセルが検出された場合、デッドピクセルを除去するか、後の計算のために記録するか、または隣接するピクセルデータを使用してデッドピクセルに補間することが可能である。これはケースバイケースで決めればよい。
システムの様々な部分、例えば、温度の維持及び検証が必要な電子コントローラー又は検出器について、温度センサーを一次指標又は二次検証システムとして使用することができる。
検出器単体及び/又はターゲットでの測定のための1つ以上の基準点が、各測定の検証のために使用されてもよい。
<スペクトルイメージングの例-デュアルエネルギー材料分解と複数のエネルギーレベルへの拡張>
デュアルエネルギー及びマルチエネルギーX線イメージングを行うための装置及び方法は、大型フォーマットの二次元検出器を使用することを含むことができる。デュアルエネルギーX線イメージングを実行するための目標は、少なくとも2つある。第1は、デュアルエネルギーイメージング法を用いて散乱を除去することである。図1に示されるように、1つの検出器とビーム粒子ストッパープレートまたはビーム粒子ストッパーのみが使用される場合、この方法は必要ない。
デュアルエネルギー及びマルチエネルギーX線イメージングを行うための装置及び方法は、大型フォーマットの二次元検出器を使用することを含むことができる。デュアルエネルギーX線イメージングを実行するための目標は、少なくとも2つある。第1は、デュアルエネルギーイメージング法を用いて散乱を除去することである。図1に示されるように、1つの検出器とビーム粒子ストッパープレートまたはビーム粒子ストッパーのみが使用される場合、この方法は必要ない。
別の例では、X線源は飛行時間のものであり、散乱と一次X線イメージは時間領域において分離されることができる。
別の例では、対象の上流にあるX線源よりも下流の一次X線変調器が、周波数領域で一次X線から散乱X線を分離するために使用される。
第2の目標は、対象が少なくとも2つの材料を含む場合に、イメージ対象の2つ以上の材料組成イメージを決定することである。
装置のハードウェア構成要素は、前から後ろへ物理的な順序で複数存在することができる。(1)X線源は、X線を放出する。(2)前面の2次元検出器配列は、一次X線と散乱X線を受信する。(3)ビーム選択装置により、複数の進行方向の一次X線の通過を防止し、他の進行方向の一次X線の通過を許容する。散乱X線はほとんど影響を受けずに通過する。(4)ビーム選択装置を通過した散乱X線及び一次X線は後方の二次元検出器で捕捉される。ビーム選択装置の動作により、後方検出器アセンブリは、多数の検出位置で散乱X線のみを受光し、他の検出位置で後方検出器アセンブリは一次X線と散乱X線の両方を受け取る。
線形化近似に頼らずにデュアルエネルギー又はマルチエネルギーX線イメージング方程式系を直接解くデータ分解方法を使用することができる。この方法は、デュアルエネルギー一次X線イメージペア又はマルチプルエネルギーイメージセットと、材料組成イメージペア又は材料組成イメージセットとの間に直接的な双方向関係を確立するものである。デュアルエネルギー又はマルチエネルギーデータ分解法に基づいて、デュアルエネルギー一次イメージのペア又はマルチエネルギーイメージのセットが与えられると、材料組成イメージは、ユーザーの介入なしに自動的に計算されることができる。デュアルエネルギー分解イメージ処理は、3つ以上の材料または成分を含む対象の場合、繰り返し行うことができる。各デュアルエネルギー分解計算処理ステップの後、対象イメージから少なくとも1つの物質または1つの材料が抽出される。
デュアルエネルギーX線データ分解法の概要を以下に示すと、マルチエネルギーデータ分解法はその延長線上にある。本方法は、いかなる線形または2次近似にも依存することなく、その原形で非線形デュアルエネルギーX線イメージング基本方程式系を直接的に解くものである。その方法は以下の通りである。(1)原形の非線形デュアルエネルギーX線イメージング基本方程式系に従って、各検出器の明示的な定量方程式系D.sub.H =F.sub.DH (b,s) および D.sub.L =F.sub.DL (b,s) を構築し、構築した方程式系を後の使用のために保存し、D.sub.Hは低エネルギー一次X線信号およびD.sub.Lは高エネルギー一次X線信号が表されている。D.sub.Hは低エネルギー一次X線信号、D.sub.Lは高エネルギー一次X線信号である。(2) ステップ 1 の方程式系を数値的に反転することにより,3次元表面方程式系b=b(D.sub.H, D.sub.L) および s.×.s(D.sub.H, D.sub.L) を再構成し,再構成した方程式系を後に使用するために保存する。(3)利用可能なデータ対(D.sub.H, D.sub.L)をステップ2の数値方程式に挿入して、個々の検出器セルの位置におけるbとsの望ましい値を決定するか、逆にbとsの値の対が与えられている場合には、D.sub.HとD.sub.Lについての望ましい値を決定すること。(4)各ステップでの精度を、実数の解析値が提供できる程度に維持する。
マルチエネルギー法において、デュアルエネルギーX線データ構成法は、相互作用的であってよい。デュアルエネルギーX線データ構成法は、各物質または各材料を残りの対象から一度に分離するために実行される。アプリケーションの要求に応じて、多数の物質が残りの部分から個別に分離されるまで反復プロセスを続け、十分な数の物質が得られた時点で処理を停止してもよいし、個々のイメージまたは1つの物質のみを記述する分解データとして分離されるまで、かかる分解処理を続けてもよい。
デュアルエネルギーX線イメージングを実行する手順の一例は、以下のステップを含む。(1)X線の高いエネルギーレベルHと低いエネルギーレベルLにおける後方検出器アセンブリ(例えば、図9及び図16参照)の一対のイメージデータを取得する。ビーム選択装置の機能により、取得したイメージデータにおいて、いくつかの検出器セルには散乱X線信号のみが含まれ、他の検出器セルには一次X線信号と散乱X線信号の組合せが含まれる。(2)ステップ1の直接受信データから、後方検出器アセンブリの一対のデュアルエナジー一次イメージデータを導出する。デュアルエナジーX線イメージングに使用できるのは、一次X線イメージデータのみである。どのように導出を行うか、以下に説明する。(3)デュアルエネルギーデータ分解法を用いて、後方検出器のデュアルエネルギー一次イメージのペアから前方検出器の低解像度一次イメージを計算する。これは、本開示の最も重要な側面の1つである。(4)必要に応じて、高いエネルギーレベルHまたは低いエネルギーレベルLのいずれかで、前方検出器のための高解像度イメージを取得する(例えば、図9および16を参照)。前方検出器の低解像度一次X線イメージは、取得された高解像度イメージデータと共に、計算された低解像度一次イメージデータを用いて計算されているので、前方検出器について、高い空間分解能を有する一次イメージだけでなく散乱イメージも算出可能である。ステップ4の完了により、前方検出器の信号から不要な散乱を除去し、前方検出器の画質を向上させることができる(上述した第1の目標)。(5)ステップ4のように1つのイメージだけでなく、2つのエネルギーレベルLとHで前方検出器の一対の一次X線イメージを取得することも可能である。さらにデュアルエネルギーデータ分解法を用いることにより、高い空間分解能でイメージ対象に対する2つの材料組成イメージを取得することができる。このように、ステップ5は、上述したデュアルエネルギーX線イメージングの第2の目的を達成するものである。
米国特許第5,648,997号および米国特許第5,771,269号を参照することによりこれら全体が本明細書に追加され、これらにはビーム選択装置の異なる構造が記載されている。これらの特許では、ビーム選択装置は、後方検出器の選択された位置への散乱X線を遮断する。
前述のように、本開示のビーム選択装置は、後方検出器の特定の位置への一次X線を遮断する。異なる信号が後方検出器に到達することを許可されるので、低解像度の一次X線イメージを導出するための異なる方法が使用される。本開示に含まれる低解像度一次X線イメージは、先に説明したように、後方検出器から直接取得される。低解像度一次X線イメージは、後方検出器から取得された低解像度散乱X線イメージ及び低解像度散乱/一次合成X線イメージから算出されてもよい。
大型フォーマットの二次元検出器を使用するデュアルエネルギー又はマルチエネルギーX線イメージングのための装置及び方法は、二次元検出器配列が提供できるのと同じくらい高い空間分解能で対象の2つの材料組成イメージを提供することができる。スペクトルイメージングを可能にすることに加えて、本明細書に記載の装置及び方法は、断層撮影イメージ及び多次元イメージングを再構成するために使用される2Dイメージを提供する。
デュアルエネルギー又はマルチエネルギーイメージデータ分解は、ユーザーの介入なしにコンピュータによって自動的に実施可能である。
図43a及び43bは、本開示で使用される高いエネルギーレベルH及び低いエネルギーレベルLにおける典型的なX線源エネルギースペクトルを説明する曲線であり、図43aは高電圧HV=70kVにおけるエネルギースペクトルを示し、図43bは高電圧HV=150kVにおけるエネルギースペクトルを示している。
図44は、デュアルエネルギーデータ分解方法及び説明されたハードウェアを使用する基本的な手順のフロー図である。
図45a~図45dは、非線形デュアルエネルギー方程式系を反転させるための方法のグラフ表示である。
<デュアルエネルギーイメージングの一例>
検査対象は、X線源と前方検出器の間に配置される。X線源は、平均エネルギーレベルHの高エネルギーパルスに続いて、平均エネルギーレベルLの低エネルギーパルスの2つの連続したパルスを放出する。別の構成では、低エネルギーパルスが最初に放出される。好ましくは、両方の構成において、高エネルギーパルスは約25keVから約250keVの平均X線エネルギーを持ち、低エネルギーパルスは約15keVから約60keVの平均X線エネルギーを持ち、高エネルギーパルスは低エネルギーパルスより常に高いエネルギーである。
検査対象は、X線源と前方検出器の間に配置される。X線源は、平均エネルギーレベルHの高エネルギーパルスに続いて、平均エネルギーレベルLの低エネルギーパルスの2つの連続したパルスを放出する。別の構成では、低エネルギーパルスが最初に放出される。好ましくは、両方の構成において、高エネルギーパルスは約25keVから約250keVの平均X線エネルギーを持ち、低エネルギーパルスは約15keVから約60keVの平均X線エネルギーを持ち、高エネルギーパルスは低エネルギーパルスより常に高いエネルギーである。
X線源は、広いエネルギー範囲をカバーするエネルギースペクトルを有する。連続的な制動放射スペクトルに加えて、図38に示すように、高電圧値が十分高い場合には、エネルギースペクトルは離散的な線構造を含むこともある。現在のところ、医療用イメージングに単色エネルギーX線を提供するための有効な方法は知られていない。したがって、すべての定量的計算は、広いエネルギー範囲をカバーするX線エネルギーで実施されなければならない。X線源は点光源を含むことができ、これは、X線がより広い領域からではなく、単一の点から発せられるように見えることを意味する。X線の一部は、伝播方向を変えることなく、対象を通過して直接前方検出器アセンブリに到達する。このX線は一次X線と呼ばれ、対象に関する真の情報を伝える。残りのX線は、対象の物質との相互作用により、ランダムに散乱する。これらのX線は散乱線と呼ばれ、真の情報に歪みを生じさせる。
前方検出器は、2次元配列の多数の独立した検出器セルを含む。本開示は、特定のタイプのX線検出器配列に限定されないが、2つの基本的なタイプが存在する。第一は、光検出媒体として薄膜アモルファスシリコンを使用するものである。アモルファスシリコン薄膜は、典型的には1マイクロメートル(ミューメートル .mu.m um)の厚さを有し、可視光に敏感である。可視光線によって引き起こされた電荷は、電極の配列によって収集される。X線感応媒体であるシンチレーションスクリーンは、光検出器配列の感光領域全体に密着して配置されている。X線によりシンチレーションスクリーンに可視光子が発生し、アモルファスシリコン光検出器配列で検出され、スクリーンに吸収されたX線エネルギーに比例した電荷が発生する。このようなX線検出器配列は、外部変換型X線検出器と呼ばれる。好ましくは、検出器配列は、単一の検出器モジュールについて、20センチメートル(cm)×20センチメートルまたは40センチメートル×40センチメートルの寸法を有する。このような検出器モジュールを複数個隣接させて、より大きな検出器を提供することも可能である。この検出器配列のセルサイズは、約50 .mu.m × 50 .mu.mから約1 mm × 1 mmの範囲で可能である。
第2のタイプの検出器配列は、X線感応媒体として、非晶質セレン膜、セレン合金膜、CdZnTe膜、または他の非晶質または多結晶半導体膜のような、原子番号Zが中程度の高い半導体物質を用いる。X線によって直接検出媒体に誘起された電荷は、配列された電極によって集められ、フィルムに当たったX線のエネルギーに比例する。このタイプのX線検出器配列は内部変換型X線検出器と呼ばれる。典型的なアモルファス・セレンまたはセレン合金検出器配列モジュールは、20 cm x 20 cm または 40 cm x 40 cm の寸法で、セルサイズは約 50 .mu.m x 50 .mu.m から約 1 mm x 1 mm の範囲である。このような検出器モジュールを複数個組み合わせて、より大きな検出器配列にすることができる。
他の典型的な二次元検出器配列には、電荷結合素子(CCD)検出器、CMOS検出器、薄膜タリウムブロマイドベース検出器配列、アバランシェシリコン検出器配列、蛍光体刺激型コンピュータラジオグラフィー画面などが含まれる。
前方検出器アセンブリのセルは、その応答特性にばらつきがある。しかし、これらのばらつきはわずかであり、正規化することができるので、正規化の後、検出器のすべての検出器セルが同じ応答特性を有すると見なされる。
すべてのセルからの信号の組み合わせは、前方検出器の領域にわたるX線強度のイメージを伝達する。検出器セルは一次X線と散乱を区別することができないため、前方検出器は一次X線と散乱の組み合わせであるイメージを伝達し、以下のように表される。
D.sub.fh (x,y)=D.sub.fph (x,y)+D.sub.fsh (x,y) (1)
D.sub.fh (x,y)=D.sub.fph (x,y)+D.sub.fsh (x,y) (1)
ここで、D.sub.fは前方検出器のイメージを示し、(x,y)は前方検出器16のセルの二次元直交座標を示す。例えば、前方検出器16が1024セルの正方行列を有する場合、x及びyはそれぞれ1~1024の範囲の整数値を有することになる。D.sub.fph(x,y)は、一次X線からの寄与を示し、D.sub.fsh(x,y)は、散乱からの寄与を示す。
円筒は、その軸が一次X線の進行方向と一致するように製作され、円筒が互いに正確に平行ではなく、X線源に対して放射状となるようにする。X線源がビームセレクタから遠くに位置するにつれて、円筒は互いに平行に近づく。好ましくは、X線源は、ビームセレクタの後面から20cmから150cmの間に配置される。本開示は、X線源が有限の大きさを有する場合にも同様に成立する。
また、例えば建材の壁や床など、イメージ対象以外の線源からの散乱X線が存在する場合がある。これらの散乱X線は、従来の方法を用いることにより除外される。
好ましくは、後方検出器セルは、一辺が8から1024までのセルを有する長方形のマトリックスに配置され、各セルは一般的な二次元座標(I,J)により特定される。後方検出器アセンブリ22によって受信されたイメージは、データの2つのサブセットを含み、第1は、影状位置における散乱X線信号である。これらの位置は、(i',j')によって特定される。データの第2のサブセットは、非影の位置における一次X線と散乱X線との組み合わせを含む。これらの位置は、(i,j)によって特定される。
本開示では、これら2つのデータサブセットは、選択された位置における後方検出器での低解像度一次X線イメージデータを導出するために使用される。導出のための手順を以下に説明する。用語「選択された位置」は、ビームセレクタの機能及び本開示の手順の使用により、信号が導出された一次X線のみを含む、後方検出器上の位置の配列と定義される。
選択された位置の後方検出器セルは、前方検出器セルの幾つかと固定された幾何学的関係を有する。この関係は、X線源からビームセレクタ18を通って選択された投影線を選択された位置に引くことによって確立される。この選択された投影線は、座標(i,j)で後方検出器セルにおいて後方検出器表面と交差し、座標(x(i),y(j))で前方検出器セルにおいて前方検出器表面と交差している。ここで、(x(i),y(j))は、選択された投影線に最も近い前方検出器セルの座標(x,y)を示す。選択された位置のイメージファイルD.sub.rl(i,j)は、低解像度のイメージファイルである。イメージピクセル(i,j)のデータは,単一の検出器セルから,または選択された投影線の周囲の少数の検出器セルの組み合わせから得られたデータである。同様に、D.sub.fl(x(i),y(j))は、低い空間解像度を有する前方検出器26からのイメージファイルを表わす。本開示では、「解像度」という単語は、振幅解像度とは対照的に、空間解像度を表すためにのみ使用される。イメージ位置(x(i),y(j))のデータは、単一の検出器セルのデータ、又は選択された投影線の周りの少数の検出器セルの組み合わせのいずれかのデータである。(i,j)と(x(i),y(j))の関係は実験的に確立され、保存されている。選択された投影線上のイメージデータは低解像度イメージであり、小文字のlで表される。全ての前方検出器セルからのイメージデータは高解像度イメージであり、小文字のhで表される。
b(i,j)及びs(i,j)は、選択された投影線(i,j)に沿った選択された投影質量密度に対する低解像度イメージと定義される。b(x,y)とs(x,y)は、投影線(x,y)に沿った投影質量密度と定義される。「投影質量密度」は、単位面積当たりの投影線に沿った対象の総質量の積分値として定義される。投影質量密度は検出器セルの大きさに依存しないので、b(x(i),y(j))=b(i,j)、s(x(i),y(j))=s(i,j)とする。
本開示のデュアルエネルギーイメージング処理の数学的及び物理的基礎は、以下のように詳述される。
好ましくは、平均エネルギーレベルHの高エネルギーX線パルスと平均エネルギーレベルLの低エネルギーパルスに続いて、後方検出器の2つのイメージが取得される。これらの2つのイメージのそれぞれの座標は、一般的な表記法(I,J)を有し、I=1,2,3,.... N、J=1,2,3, ... ...Mであり,MとNは整数である。(I,J)は(i,j)と(i',j')の2つのサブセットを持つ。(i',j')のデータサブセットは、D.sub.rHsl (i',j')とD.sub.rLsl (i',j') として特定される散乱のみのX線信号である。(I,J)は(i,j)と(i',j')の2つのサブセットを持つ。(i',j')のデータサブセットは、D.sub.rHsl (i',j')とD.sub.rLsl (i',j') として特定される散乱のみX線信号である。(i,j)におけるデータサブセットは、D.sub.rHl (i,j)及びD.sub.rLl (i,j)として特定される一次X線信号及び散乱X線信号の組合せを有する。位置(i,j)は、後方検出器のイメージ平面全体を一様にカバーし、位置(i',j')に近いものが選択される。イメージ D.sub.rHsl (i',j') と D.sub.rLsl (i',j') は共に散乱線のみのX線信号であるため、補間により後方検出器のイメージ面全体に拡張することが可能である。散乱X線の物理的性質から、補間しても無視できない誤差が生じることはない。散乱の大部分はコンプトン散乱によるもので、好ましいX線エネルギー範囲において実質的に一様な角度分布を持っている。経験的なデータと理論計算の両方が、散乱は常に2次元イメージ平面上で実質的に滑らかな分布を持つことを示している。すなわち、隣接するセル間の散乱強度の変化は小さく、滑らかである。したがって、データ点数が十分に多い限り、補間によって生じる誤差は、X線光子数の統計的揺らぎなどの他の誤差源と比較して無視できる程度である。したがって、選択された位置(i,j)における散乱のみの信号が補間によって得られ、D.sub.rHsl(i,j)、D.sub.rLsl(i,j)として特定される。したがって、一対の一次イメージ信号D.sub.rHpl(i,j)、D.sub.rLpl(i,j)は、次のように算出可能である。
D.sub.rHpl (i,j)=D.sub.rHl (i,j)-D.sub.rHsl (i,j) (2a)
D.sub.rLpl (i,j)=D.sub.rLl (i,j)-D.sub.rLsl (i,j) (2b)
D.sub.rHpl (i,j)=D.sub.rHl (i,j)-D.sub.rHsl (i,j) (2a)
D.sub.rLpl (i,j)=D.sub.rLl (i,j)-D.sub.rLsl (i,j) (2b)
ここで、D.sub.rHl(i,j)及びD.sub.rLpl(i,j)は直接取得したデータ、D.sub.rHsl(i,j)及びD.sub.rLsl(i,j)は補間したデータである。
次のステップでは、一次イメージペアD.sub.rHpl(i,j)およびD.sub.rLpl(i,j)から、前方検出器における一次イメージを計算する。高分解能イメージD.sub.fHh(x,y)は、平均エネルギーレベルHの高エネルギーX線パルスに続いて前方検出器29から取得され、高分解能イメージD.sub.fLh(x,y)は、平均エネルギーレベルLの低エネルギーX線パルスに続いて前方検出器から取得され、高分解能イメージペアは##EQU1##と書くことができる。一方、式ペア2a、2bから得られる後方検出器の低解像度一次イメージは、##EQU2##と書くことができる。ここで、.PHI.sub.0H(E)および.PHI.sub.0L(E)は高いエネルギーレベルHおよび低いエネルギーレベルLにおけるX線源のエネルギースペクトルを示し、対象12の投射質量密度b(i,j)およびs(i,j)はグラム/平方センチメートル(g/cm 2 )単位で示されている。.mu.sub.b(E)は骨組織の質量減衰係数、.mu.sub.s(E)は軟組織の質量減衰係数であり、.mu.sub.b(E)および.mu..s(E)とも平方センチメートル/グラム(cm2 /g)の単位で表される。これらの値の両方は、実験的に決定され、以前に表わされた既知のものである。なお、式[.PHI.sub.0 (E).×.exp(-(.mu..sub.b (E). ×.b(x,y)+.mu..sub.s (E). ×.s(x,y))]という用語は、対象を通過した後に前方検出器に入射する一次X線のエネルギースペクトルで、expo () は値 e をカッコ内に指定したパワーに上げたものを表している。S.sub.f(E)は、前方検出器のX線スペクトル感度(X線が対象を通過した後のエネルギーEのX線の数の関数としての検出器からの電気信号振幅)である。S.sub.f(E)には、検出器自体のX線分光感度だけでなく、対象と前方検出器との間のX線の吸収を考慮したX線透過係数も含まれる。このような吸収は、例えば、前方検出器の保護ケース材料に起因する。.intg..PHI..sub.s (E).×.S.sub.f (E)dE という用語は、散乱による信号を表している。散乱の過程は複雑で正確にモデル化することができないため,正確な式は不明である。座標(x,y)は前方検出器セルに対応する。
方程式ペア2a,2bにおいて、低解像度デュアルエネルギーイメージペアは、一次信号を含み、散乱歪みのないものである。上記及び後述するデュアルエネルギーデータ分解法を用いることにより、連立方程式ペア2a、2bを解いて、材料組成b(i,j)及びs(i,j)のイメージペアの解を求めることができる。データ分解法のため、高度に発展した方程式系2a、2bを解くことは、与えられたデータペアD.sub.rHpl (i,j), D.sub.rLpl (i,j) を入力として出力としてのb (i,j), s (i,j) の値のペアを生成するためにコンピュータソフトウェアの操作によって行うことが可能である。
上述したように、後方検出器セル(i,j)及び前方検出器セル(x(i),y(j))は同じ選択された投影線上にあるので、低解像度前方検出器一次イメージペアD. sub.fHpl (x(i),y(j)), D.sub.fLpl (x(i),y(j)) は、データ分解法を再び適用することにより、後方検出器一次イメージペアD.sub.rHpl (i,j), D.sub.rLpl (i,j) からさらに決定することが可能である。さらに、前方検出器散乱イメージペア D.sub.fHsl (x(i),y(j)), D.sub.fLsl (x(i),y(j)) は、次式で求められる。
D.sub.fHsl (x(i),y(j))=D.sub.fHl (x(i),y(j))-D.sub.fHpl (x(i),y(j))(3a) および
D.sub.fLsl (x(i)y(j))=D.sub.fLl (x(i),y(j))-D.sub.fLpl (x(i),y(j))(3b)
D.sub.fHsl (x(i),y(j))=D.sub.fHl (x(i),y(j))-D.sub.fHpl (x(i),y(j))(3a) および
D.sub.fLsl (x(i)y(j))=D.sub.fLl (x(i),y(j))-D.sub.fLpl (x(i),y(j))(3b)
次のステップは、低解像度散乱イメージ D.sub.fHsl (x(i),y(j)) と D.sub.fLsl (x(i),y(j)) の値を補間して、選択した投影線上にないそれらの検出器セルを含み、2 つの高解像度散乱イメージ D.sub.fHsh (x,y) と D.sub.fLsh (x,y) を生成することを含む。この補間は、上述したように、物理的な散乱プロセスの性質上、精度の低下を招くことはない。散乱イメージは散乱の性質上、補間することができるが、一次イメージは対象12とともに検出器セルから検出器セルへと変化するため、補間することができない。
続いて、前方検出器上の高解像度一次イメージをD.sub.fHph(x,y)及びD.sub.fLph(x,y)と表し、以下の通りである。
D.sub.fHph (x,y)=D.sub.fHh (x,y)-D.sub.fHsh (x,y) (4a)
および
D.sub.fLph (x,y)=D.sub.fLh (x,y)-D.sub.fLsh (x,y) (4b)
D.sub.fHph (x,y)=D.sub.fHh (x,y)-D.sub.fHsh (x,y) (4a)
および
D.sub.fLph (x,y)=D.sub.fLh (x,y)-D.sub.fLsh (x,y) (4b)
イメージペア D.sub.fHph (x,y), D.sub.fLph (x,y) は、散乱のないデュアルエネルギーX線イメージのペアである。このイメージペアは、順次、式##EQU3##によって対象の材料組成に関連する。
連立方程式系3a,3bとは異なり、連立方程式系4a,4bは、散乱歪みのない一次X線信号のみを有する。この方程式ペアは、散乱放射が2次元検出器から本質的に除去されているという前例のない特徴を有する基本的なデュアルエネルギーX線イメージング方程式システムである。方程式ペア4a,4bにおいてD.sub.fHph(x,y),D.sub.fLph(x,y)の値は、前方検出器から直接測定されたイメージペア D.sub.fHh(x,y),D.sub.fLh(x,y)上と、後方検出器から直接測定したイメージ D.sub.rHsl (i',j'), D.sub.rLsl (i',j'), D.sub.rHl (i,j), D.sub.rLl (i,j) 上で実行した上述の計算で既知である。未知値は、2つの材料組成イメージb(x,y)とs(x,y)である。
デュアルエネルギーX線データ分解法は、方程式ペア4a、4bにさらに適用可能である。その結果、データ分解法によって提供される定量的関係b=b(D.sub.H、D.sub.L)及びs=s(D.sub.H、D.sub.L)を用いて、高解像イメージb(x,y)及びs(x,y)のペアがポイントごとに全ての前方検出器セル(x,y)に対して得られる。二成分材料組成イメージb(x,y)およびs(x,y)の解は、前方検出器29が提供できるのと同程度の高い空間解像度を有する。
あるいは、スイッチング高電圧電源を有するX線源を使用することもできる。スイッチング高圧X線源は、低エネルギーのX線と高エネルギーのX線とを交互に連続的に発生させるものである。スイッチング高電圧X線源は、反復型ダブルパルスX線源として扱うことができる。
散乱効果を低減するためのビームストップ法の使用について、Loらの雑誌記事が掲載されている。Loらは、2つの刺激蛍光体スクリーンの間に挟まれたビームストップ配列を使用して、後部スクリーンの散乱のみのイメージを取得した。検出器ジオメトリと本開示において一定の類似性があるが、その類似性は表面的なものに過ぎない。本開示とLoらの違いの1つは、以下の通りである。
(1)Loらは、シングルエネルギー法を用いている。後方検出器の単一のX線エネルギースペクトルで取得した散乱のみのイメージに定数を乗じ、その積のイメージを前方検出器の散乱イメージとして使用するものである。従って、Loらの方法は、本開示とは異なる。本開示の数理物理理論によれば、上述したように、X線エネルギースペクトルは幅広いエネルギー分布を有するため、未知のイメージ対象を知らなければ、前方検出器の単一イメージと後方検出器の単一イメージとの間に関数関係は存在しない。未知のイメージ対象が計算に含まれる場合、その関係の有用性は非常に制限される。これまでのところ、Loらの論文を含む従来のX線イメージングにおいて、未知のイメージ対象に依存することなく、このような関数的関係を確立することができる方法は存在しない。本開示は、一対のデュアルエネルギー一次X線信号を通じて、前方検出器のイメージと後方検出器のイメージとの間に、十分に定義された関数的関係を確立する。この状況は、以下の式8a~8fで表すことができる。第一に、
D.sub.fp (x(i),y(j)).noteq.constant.×.D.sub.rp (i,j) (8a)
後方検出器イメージに較正定数を乗じることによって前方検出器の一次イメージを得るいかなる試みも、前方検出器の真の一次X線イメージにならない。散乱X線イメージについても同様であり、すなわち、
D.sub.fs (x(i),y(j)).noteq.constant.×.D.sub.rs (i,j) (8b)
第二に、
D.sub.fp (x(i),y(j)).noteq.F(D.sub.rp (i,j)) (8c)
D.sub.fp (x(i),y(j)).noteq.constant.×.D.sub.rp (i,j) (8a)
後方検出器イメージに較正定数を乗じることによって前方検出器の一次イメージを得るいかなる試みも、前方検出器の真の一次X線イメージにならない。散乱X線イメージについても同様であり、すなわち、
D.sub.fs (x(i),y(j)).noteq.constant.×.D.sub.rs (i,j) (8b)
第二に、
D.sub.fp (x(i),y(j)).noteq.F(D.sub.rp (i,j)) (8c)
ここで、Fは、任意の定義された関数的関係を表す。
後方検出器のイメージに任意の数学的操作を適用して前方検出器の一次イメージを得る試みは、前方検出器の真の一次X線イメージにならないであろう。散乱イメージについても同様であり、すなわち、
D.sub.fs (x(i),y(j)).noteq.F(D.sub.rs (i,j)) (8d)
後方検出器のイメージに任意の数学的操作を適用して前方検出器の一次イメージを得る試みは、前方検出器の真の一次X線イメージにならないであろう。散乱イメージについても同様であり、すなわち、
D.sub.fs (x(i),y(j)).noteq.F(D.sub.rs (i,j)) (8d)
第1実施形態のハードウェアシステムにおいて、基本的な物理法則が成立させることができる関係は、以下の形態のみである。
D.sub.fHp (x(i),y(j))=D.sub.fHp (D.sub.rH (i,j),D.sub.rL (i,j))(8e)
D.sub.fLp (x(i),y(j))=D.sub.fLp (D.sub.rH (i,j),D.sub.rL (i,j))(8f)
D.sub.fHp (x(i),y(j))=D.sub.fHp (D.sub.rH (i,j),D.sub.rL (i,j))(8e)
D.sub.fLp (x(i),y(j))=D.sub.fLp (D.sub.rH (i,j),D.sub.rL (i,j))(8f)
言い換えれば、デュアルエネルギーX線イメージングを行う場合、前方検出器の低エネルギー一次X線イメージは、後方検出器の一次イメージペア(8e)と正確、厳密、かつ一意の関係を有する。前方検出器の高エネルギー一次イメージ(8f)についても同様である。これらの関係は、イメージ対象に依存しないため、イメージ対象が存在しない場合の較正によって確立することができる。これらの関係は、ピクセルごとにイメージ全体に対して普遍的に成り立つものである。本開示のデータ分解方法は、これらの関係を定量的に確立するための方法である。
(2)Loらと本開示との理論及び方法における違いのため、ハードウェアも異なっている。ハードウェアの違いの1つは、上述の好ましい実施例では、X線源がデュアルエネルギーX線源であるのに対し、Loらでは、シングルエネルギーX線源のみが使用されていることである。
<デュアルエネルギー分解の別の実施例>
あるいは、前方検出器とビーム選択装置を同じにしながら、X線源は、対象を照射するときにシングルエネルギースペクトルを放出することができる。さらに、後方検出器アセンブリは、デュアルエネルギーX線イメージング検出器アセンブリとして構成される。後方検出器アセンブリは、低エネルギー二次元検出器、X線エネルギースペクトルフィルタ、及び高エネルギー二次元検出器を有することができる。フィルタは、本明細書の開示に基づく従来の方法で動作することができる。フィルタは、exp(-.mu.(E).×.d)の透過関数を有することができ、ここでEはX線のエネルギー、.mu.(E)はフィルタ材料の質量減衰係数、およびdはフィルタの厚さである。X線の吸収はX線のエネルギーに依存するため(質量減衰係数はEの関数)、フィルタは高エネルギーX線よりも低エネルギーX線をより多く吸収する。したがって、フィルタ後の高エネルギーX線と低エネルギーX線との割合は、フィルタ前よりも大きくなり、フィルタ後の規格化X線平均エネルギーは、フィルタ前よりも大きくなる。好ましくは、低エネルギーX線は10keVから100keVの平均エネルギーを有し、高エネルギーX線は30keVから500keVの平均エネルギーを有し、高エネルギーX線は低エネルギーX線より高いエネルギーを有する。
あるいは、前方検出器とビーム選択装置を同じにしながら、X線源は、対象を照射するときにシングルエネルギースペクトルを放出することができる。さらに、後方検出器アセンブリは、デュアルエネルギーX線イメージング検出器アセンブリとして構成される。後方検出器アセンブリは、低エネルギー二次元検出器、X線エネルギースペクトルフィルタ、及び高エネルギー二次元検出器を有することができる。フィルタは、本明細書の開示に基づく従来の方法で動作することができる。フィルタは、exp(-.mu.(E).×.d)の透過関数を有することができ、ここでEはX線のエネルギー、.mu.(E)はフィルタ材料の質量減衰係数、およびdはフィルタの厚さである。X線の吸収はX線のエネルギーに依存するため(質量減衰係数はEの関数)、フィルタは高エネルギーX線よりも低エネルギーX線をより多く吸収する。したがって、フィルタ後の高エネルギーX線と低エネルギーX線との割合は、フィルタ前よりも大きくなり、フィルタ後の規格化X線平均エネルギーは、フィルタ前よりも大きくなる。好ましくは、低エネルギーX線は10keVから100keVの平均エネルギーを有し、高エネルギーX線は30keVから500keVの平均エネルギーを有し、高エネルギーX線は低エネルギーX線より高いエネルギーを有する。
X線照射の後、後方検出器の2つのイメージを取得することができる。これらの2つのイメージの各々の座標は、一般的な表記法(I,J)を有し、I=1,2,3,...NおよびJ=1,2,3, ...とする。Mであり,MとNは整数である。(I,J)は、(i,j)と(i',j')という二つのサブセットの位置を持つ。位置(i',j')のデータセットは、D.sub.rHsl(i',j')及びD.sub.rLsl(i',j')として特定される散乱線のみのX線信号である。位置(i,j)のデータセットは、D.sub.rHl(i,j)及びD.sub.rLl(i,j)として特定される一次X線信号及び散乱X線信号の組合せを有している。位置(i,j)は、後方検出器のイメージ平面の全体を一様にカバーし、位置(i',j')に物理的に近くなるように選択される。イメージ D.sub.rHsl (i',j'), D.sub.rLsl (i',j') は散乱X線信号のみを含むので、補間によって後方検出器のイメージ平面全体に拡張することができる。この補間は、上記で説明したように、無視できない誤差を生じない。したがって、選択された位置(i,j)における散乱線のみの信号は補間によって得られ、D.sub.rHsl (i,j), D.sub.rLsl (i,j) として特定される。従って、一対の一次イメージ信号D.sub.rHpl (i,j), D.sub.rLpl (i,j) を算出可能である。
D.sub.rHpl (i,j)=D.sub.rHl (i,j)-D.sub.rHsl (i,j) (9a)
D.sub.rLpl (i,j)=D.sub.rLl (i,j)-D.sub.rLsl (i,j) (9b)
D.sub.rHpl (i,j)=D.sub.rHl (i,j)-D.sub.rHsl (i,j) (9a)
D.sub.rLpl (i,j)=D.sub.rLl (i,j)-D.sub.rLsl (i,j) (9b)
ここでD.sub.rHl (i,j)およびD.sub.rLl (i,j) は(i,j)で直接取得されたデータであり、D.sub.rHsl (i,j)およびD.sub.rLsl (i,j)はサブセット(i',j')を補間して得られる散乱データである。
次のステップで、一次イメージペア D.sub.rHpl (i,i), D.sub.rLpl (i,j) から前方検出器での一次イメージを算出することができる。前方検出器での高分解能イメージは、次のように書くことができる。##EQU4##..PHI.sub.s (E).×.S.sub.f (E)dE は散乱による信号である。
後方検出器アセンブリは2つの検出器を有することができるので、(9a)及び(9b)で導かれるように、2つの低解像度一次イメージD.sub.rHpl(i,j)及びD.sub.rLpl(i,j)は、##EQU5##である。上述したように、S.sub.rH(E)及びS.sub.rL(E)には、対象12と各後方検出器22との間のX線の吸収を考慮したX線透過係数が含まれる。S.sub.rH(E)についてのこのような吸収は、例えば、前方検出器アセンブリ、スペクトルフィルタ、後方検出器保護ケース、及び後方低エネルギー検出器によるものである。
式9a及び9bは連立方程式系を構成し、信号ペアD.sub.rHpl (i,j), D.sub.rLpl (i,j) に対する値は既知の量である。エネルギー依存関数.PHI.sub.0 (E).×.S.sub.rH (E) および.PHI.sub.0 (E).×.S.sub.rL (E) は直接知られていないが較正プロセスで決定することが可能である。後述するデータ分解法は、これらの量をイメージ演算に先立ち決定する方法を提供する。b(i,j)、s(i,j)は、後述のような方程式ペア9a、9bを解くことができる未知量である。
正確なb(i,j)及びs(i,j)は、以下に説明するように、本開示のデータ分解方法によって計算される。b(i,j)及びs(i,j)に対する値が既知であるので、前方低解像度散乱無イメージD.sub.fpl(x,y)は、##EQU6##によって選択される投影線上にある前方検出器セル(x(i),y(j))に対して得ることができる。ここで、エネルギー依存関数.PHI..sub.0 (E).×.S.sub.f (E)は、以下のデータ分解セクションで説明するように、較正において与えられている。
次に、方程式1を適用して低解像度前面散乱イメージD.sub.fsl(x(i),y(j))が決定される。
D.sub.fsl (x(i),(j))=D.sub.fl (x(i),y(j))-D.sub.fpl (x(i),y(j))
D.sub.fsl (x(i),(j))=D.sub.fl (x(i),y(j))-D.sub.fpl (x(i),y(j))
散乱の物理的性質のため、上述のように、低解像度散乱イメージD.sub.fsl(x(i),y(j))は、精度を失うことなく補間によって(x,y)平面全体に拡張することができ、高解像度散乱イメージD.sub.fsh(x,y)が得られ、これは実験測定イメージD.sub.fh(x,y)から減算されて高解像度一次イメージD.sub.fph(x,y)をもたらす。)デュアルエネルギーイメージングは、前方検出器のイメージ画質を向上させ、前方検出器イメージから散乱を除去する目的で実施することができる。
<データ分解法>
以下は、上記でまとめたデータ分解法のステップごとの説明である。
以下は、上記でまとめたデータ分解法のステップごとの説明である。
最初のステップは、3次元空間における2つの同時数値表面方程式D.sub.H =F.sub.DH (b,s) および D.sub.L =F.sub.DL (b,s) を構築することである。これを行う好ましい方法は、検出システムのエネルギー依存関数を決定し、この関数を用いてD.sub.HとD.sub.Lの数値配列を計算することである。
方程式ペア9a,9bと方程式ペア2a,2bの間には違いがある。統一された表記を用いれば、この2組のペアは同じ形になる。検出器のシステムエネルギー依存関数はsps(E)と表記され、以下のように定義される。
sps(E)=.PHI..sub.0 (E).×.S(E) (13)
sps(E)=.PHI..sub.0 (E).×.S(E) (13)
ここで、.PHI..sub.0(E)はX線源12から放出されるX線エネルギースペクトルであり、S(E)は検出器のエネルギー応答関数である。方程式ペア4a,4bは次のようになる。
sps.sub.H (E)=.PHI..sub.0H (E).×.S.sub.f (E) (14a)
および
sps.sub.L (E)=.PHI..sub.0L (E).×.S.sub.f (E) (14b)
および第2実施形態で、方程式ペア11a, 11b は、
sps.sub.H (E)=.PHI..sub.0 (E).×.S.sub.fH (E) (15a)
および
sps.sub.L (E)=.PHI..sub.0 (E).×.S.sub.fL (E) (15b)
sps.sub.H (E)=.PHI..sub.0H (E).×.S.sub.f (E) (14a)
および
sps.sub.L (E)=.PHI..sub.0L (E).×.S.sub.f (E) (14b)
および第2実施形態で、方程式ペア11a, 11b は、
sps.sub.H (E)=.PHI..sub.0 (E).×.S.sub.fH (E) (15a)
および
sps.sub.L (E)=.PHI..sub.0 (E).×.S.sub.fL (E) (15b)
となる。
関数sps(E)は、デュアルエネルギーイメージングシステムの完全なエネルギー依存特徴を含む。sps(E)を決定することの一つの利点は、後続の全てのデータ処理方法が対象2から独立したものになることである。
イメージングシステムのエネルギー依存関数sps(E)を決定するための好ましい方法は、十分に確立された吸収法を使用することである。直線化された細い一次X線ビームを使用して吸収曲線を測定する。アルミニウム、ルーサイト.RTM、銅などの既知の材料からなる吸収板は、X線源と検出器の間に置かれる。吸収板の厚さtの関数としての単一検出器セルからの電気信号D(t)は実験的に決定され、方程式を通してsps(E)に関連付けられる。
D(t)=.intg.sps(E).×.exp(-.mu.(E).×.t)dE (16)
D(t)=.intg.sps(E).×.exp(-.mu.(E).×.t)dE (16)
吸収板材料の質量減衰係数.mu.(E)が分かっているので、関数sps(E)をデュアルエネルギーX線イメージングで必要な精度で決定することができる。この方法は、特に内部変換型の二次元X線検出器に便利である。これらの検出器では、検出効率と検出器のエネルギー応答関数は、解くべき未知パラメータが少なく、簡単な解析式で表すことができる。内部転換型検出器のエネルギー応答関数は,##EQU7## のように書かれ、ここで、S.sub.0 (E)=[1-exp(-.mu..sub.0 (E).×.d)].×..alpha.E はエネルギーEのX線光子によって引き起こされる電気信号振幅、 .mu..sub.0 (E) は検出器の変換層の質量減衰係数、dは検出器セルの変換層の厚さであり、S.sub.1 (E)=exp(-.mu..sub.1 (E).×.d.sub.1 -.mu..sub.2 (E).×.d.sub.2) はイメージ対象から検出器表面へ出た後のX線透過率であり、.mu..sub.1(E)、.mu..sub.2(E)は2つの与えられた材料の減衰係数、d.sub.1、d.sub.2はこれらの材料の厚さの値である。
X線エネルギースペクトル.PHI..sub.0(E)を別途測定する場合、これらの未知のパラメータ.alpha.、d、d.sub.1、およびd.sub.2は式16により標準の最小二乗パラメータ適合技術を使用して決定される。そして、エネルギー依存関数sps(E)を単一細胞について高い精度で求める。正規化後、1つのセルのエネルギー依存関数sps(E)は、同じ検出器のすべてのセルのそれを表す。
sps(E)の値が所望の精度で決定されると、対象の材料組成の関数としてのデュアルエネルギー信号が、次式によって計算される。
D.sub.H =.intg.sps.sub.H (E).×.exp(-(.mu..sub.b (E).×.b+.mu..sub.s (E).×.s))dE (18a)
および
D.sub.L =.intg.sps.sub.L (E).×.exp(-(.mu..sub.b (E).×.b+.mu..sub.s (E).×.s))dE (18b)
D.sub.H =.intg.sps.sub.H (E).×.exp(-(.mu..sub.b (E).×.b+.mu..sub.s (E).×.s))dE (18a)
および
D.sub.L =.intg.sps.sub.L (E).×.exp(-(.mu..sub.b (E).×.b+.mu..sub.s (E).×.s))dE (18b)
ここで、.mu..sub.b(E)及び.mu..sub.s(E)はそれぞれ骨組織及び軟組織に対する十分に文書化された質量減衰係数である。質量面密度b及びsは、対象の実範囲を十分にカバーする値が割り当てられている。
定量的明示関数D.sub.H =F.sub.DH (b,s) および D.sub.L =F.sub.DL (b,s) を構築するための別の好ましい方法は、選択した多数のbおよびs値における信号D.sub.H およびD.sub.L の直接測定を実施することである。b と s のデータポイントの数は約 5 から約 30 の範囲である。データポイントが多いほど、結果の精度は高くなる。しかし、データポイントの数は許容できる作業量によって制限される。関数 D.sub.H =F.sub.DH (b,s) および D.sub.L =F.sub.DL (b,s) の全体は,標準的な二次元補間アルゴリズムを用いて直接測定したデータ点から得られる。この場合の補間は,関数 D.sub.H =F.sub.DH (b,s) および D.sub.L =F.sub.DL (b,s) が連続,滑らか,かつ単調であるため有効である。
第2のステップは、材料組成イメージbとsをイメージペアD.sub.H、D.sub.Lの関数として求めることである。b(D.sub.H、D.sub.L)及びs(D.sub.H、D.sub.L)の連立方程式系を求める手順は図45aから図45dにグラフ的に示されている。そのためには、連立方程式のペア D.sub.H =F.sub.DH (b,s) と D.sub.L =F.sub.DL (b,s) を反転させる必要がある。好ましい反転の方法は以下の通りである。
(1)図45a及び図45bのように、(b,s)平面内の座標点の1つに対応するb及びsに所望の範囲の値の組を割り当てて、b=bn、及びs=s.sub.m、ここでn=0,1,2,...Nとなり、m=0,1,2, ...,Mとなる。典型的なNとMの値は約50から約5,000の間である。NとMが大きい程、結果の精度は高くなる。しかし、NとMの最大値は、コンピュータのメモリ容量と計算速度によって制限される。三次元曲面F.sub.DL(b,s)とF.sub.DH(b,s)を表す二つの数値式から、D.sub.H[n,m]=D.sub.H(b=b.sub.n、s=s.sub.m)と、D.sub.L[n,m]=D.sub.L(b=b.sub.n、s=s.sabm)となるように、F.sub.DL (b,s) およびF.sub.DH (b,s)を決定し、ここで、D.sub.H [n,m] および D.sub.L [n,m] は2つの特定の実数であり、そして
(2) 図45c及び図45dのように、4つの数D.sub.H [n,m], D.sub.L [n,m], b.sub.n, 及び s.sub.m を再プロットして、3次元表面 b(D.sub.H, D.sub.L) 及び s(D.sub.H, D.sub.L) にデータ点の対を提供することである。
三次元曲面b(D.sub.H, D.sub.L)上のデータ点は、D.sub.H =D.sub.H [n,m], D.sub.L =D.sub.L [n,m], b=b.sub. nであり、3次元曲面s(D.sub.H、D.sub.L)上のデータ点は、D.sub.H =D.sub.H [n,m], D.sub.L =D.sub.L [n,m], s=s.sub.m である。b=b.sub.nの値(b.sub.0,b.sub.1,b.sub.2, ... ,b.sub.N)のすべてとs=s.sub.mの値(s.sub.0, s.sub.1,s.sub.2, ... ,s.sub.M )のすべてを通過したら反転作業の一端は完了である。しかし、反転された配列 b=b(D.sub.H, D.sub.L) と s=s(D.sub.H, D.sub.L) を格納する目的で、D.sub.H =D.sub.H [n,m] と D.sub.L =D.sub.L [n,m] のステップサイズの調整が必要かもしれない。 反転空間において、D.sub.HとD.sub.Lは基準座標である。NのM倍のデータ点から、D.sub.HについてはJ個のデータ点のみを選択し、D.sub.LについてはK個のデータ点のみを選択し、JとKはNとMとほぼ同じ範囲になるようにする。 第二段階後の最終形態では、二つの二次元配列が得られ、保存される:b=b(D.sub.H, D.sub.L) and s=s(D.sub.H, D.sub.L), where D.sub.H =D.sub.H [j], D.sub.L =D.sub.L [k]; j=0,1,2, ... . J, D.sub.H [j]>D.sub.H [j+1] and k=0,1,2, .... , K, D.sub.L [k]>D.sub.L [k+1]である。さらに2つの1次元配列D.sub.H [j]とD.sub.L [k]も格納されている。配列D.sub.H [j]とD.sub.L [k]は、実数計算で得られる精度を維持するように保存することができる。
次に、数値反転処理の理論的基礎について説明する。合理的なデュアルエネルギーイメージング条件下で真の物理的現実に対応する唯一の解が常に存在することを、数学と物理学の議論を用いて一般的に証明することが可能である。数学的証明に用いられる特徴として、元の形式のデュアルエネルギー基本方程式システムの各方程式が連続的であり、高次の導関数まで連続であり、変数bとsの両方に関して均一に単調であるという事実が含まれる。ソリューションの一意性のため、上記の反転プロセスは意味があり、正しいソリューションを提供する。解の一意性から、上記の反転処理は意味があり、正しい解を与える。
第三のステップは、確立された方程式に従って、入力データから所望の結果を求めることである。各セル位置におけるbとsの所望値は、利用可能なデータペア(D.sub.H, D.sub.L) をステップ2の数値方程式に挿入することによって決定される。逆に、個々の各セル位置におけるD.sub.HおよびD.sub.L、または一方のみが必要な場合はその一方についての所望の値、は利用可能なデータペア(b、s)をステップ1の数値方程式に挿入することによって決定される。
第4のステップは、連続領域関数を維持するために、bとsの値の精度を維持することである。計算の精度は、実数の解析計算で与えられるであろう結果と同程度に維持される。コンピュータはデジタルであるため、コンピュータに格納されているデータ配列は有限のステップを持ち、ここでは実数配列の指標として整数値を持つと仮定する。以下の手順により、このような有限ステップに関連するデータ処理の誤差を確実に排除することができる。
ステップ1において、D.sub.H [n,m]=D.sub.H (b=b.sub.n, s=s.sub.m) および D.sub.L [n,m]=D.sub.L (b=b.sub.n, s=s.sub.m) に対する方程式ペアを構築する処理で、b.sub.n とs.sub.m の値のペアごとに D.sub.H [n,m] と D.sub.L [n,m] が実数の精度で測定または計算される。D.sub.H [n,m] と D.sub.L [n,m] は実数配列としてコンピュータに格納される。
ステップ2において、D.sub.H空間とD.sub.L空間での再プロットを含む反転処理では、データ処理による誤差が生じない。条件D.sub.H [j-1]>D.sub.H [j]>D.sub.H [j+1]を満足する D.sub.H [n,m]のいずれかの値 と正確に一致する値を D.sub.H =D.sub.H [j]に選択する限り、また条件D.sub.L [k-1]>D.sub.L [k]>D.sub.L [k+1]を満たす D.sub.L [n,m] の値のいずれかの値と正確に一致する値をD.sub.L =D.sub.L [k] の値に選択する限り、ステップのサイズを変えても精度が落ちない。
ステップ3において、各測定デュアルエネルギー信号データペア(D.sub.HEX、D.sub.LEX)について、下記基準に従い、最も近いj値およびk値が見いだされる。
基準:D.sub.H [j].gtoreq.D.sub.HEX .gtoreq.D.sub.H [j+1] および D.sub.L [k].gtoreq.D.sub.LEX .gtoreq.D.sub.L [k+1]
基準:D.sub.H [j].gtoreq.D.sub.HEX .gtoreq.D.sub.H [j+1] および D.sub.L [k].gtoreq.D.sub.LEX .gtoreq.D.sub.L [k+1]
指標値jとkから、まず最も近いbとsが、b.sub.0 =b.sub.0 (D.sub.H [j], D.sub.L [k])およびs.sub.0 =s.sub.0 (D.sub.H [j], D.sub.L [k]) と決定される。 bとsの値は、以下の式で実数計算と同程度の精度が得られ、##EQU8##、ここで、高次の項の値は、一般的な計算法の教科書で見つけることができる。
また、ステップ3において、与えられた材料組成データペア(b.sub.ex,s.sub.ex)からイメージペアD.sub.L及びD.sub.Hを求める場合、同様の標準テイラー表現を用いて実数の精度でD.sub.H及びD.sub.Lが求まる。
このように、上述した手順は、合理的に選択されたX線エネルギースペクトルを用いて、非線形デュアルエネルギーX線イメージング基礎方程式系を、実数解析計算を用いることで得られるのと同程度の精度で直接解くための方法を提供するものである。
以下に、上述した例から考えられる変形例を列挙する。本明細書に開示されるX線システム及び方法は、以下の変形例のうちの任意の1つ以上、及び本明細書の開示に基づく任意の他の変形例を含むことができる。
(1)現在の理論によれば、X線との相互作用の観点から、低~中原子番号の材料組成を有する広範なイメージ対象は、異なる質量減衰係数を有する広範な2つの材料に分解され得る。例えば、人体の軟組織は、デュアルエネルギーX線イメージング法を用いることで、赤身組織と脂肪組織に分解されることができる。
(2)(b,s)の関数として(D.sub.H,D.sub.L)ペアを構築する処理全体は、対数スケールなど、線形スケール以外の関数スケールまたはグリッドステップを用いて実施することができる。
(3)ソートアルゴリズムやデータベース手続きのような、いくつかの確立された計算ツールを使用して、上記の反転処理を実行することができる。
(4)上記の手順において、場合によっては、低解像度前方検出器イメージD.sub.fpl又はイメージペアD.sub.fHpl及びD.sub.fLplを得るために従来又は現在のデュアルエネルギーX線データ分解方法も使用することが可能である。これらの方法は、ビームハード二ング効果の補正を伴う線形化近似法を介して非線形基本デュアルエネルギーX線方程式系を解くものとして特徴づけることができる。この補正は2次近似を含む。しかし、そうすることによって、結果は、プロセスで使用されるこれらの近似法に固有の精度と能力によって制限されることになる。
(5)データ分解法及び散乱除去法を含む上述のステップの一つ以上(全てを含む)は、任意の二つのステップを組み合わせることから全てのステップを一つの手順にまとめることまで、様々な程度に組み合わせることができる。例えば、(b,s)を明示的に決定せずに(D.sub.rH, D.sub.rL)から(D.sub.fHp,D.sub.fLp)を算出する4方程式系を確立することが可能である。その一つの方法として、定量的な関係D.sub.fHp =(D.sub.rH, D.sub.rL) およびD.sub.fLp =(D.sub.rH, D.sub.rL) のペアをデータベースで構築し、その関係を保存しておくことが考えられる。後方検出器アセンブリの測定データペア(D.sub.rH、D.sub.rL)から、前方検出器アセンブリの新しいデータペア(D.sub.fHp、D.sub.fLp)を直接見つけることができる。
本開示の好ましい実施例の前述の説明は、例示及び説明の目的で提示された。それらは、包括的であること、または開示された正確な形態に,本開示を限定することを意図していない。多くの修正及び変形が、上記の教示に照らして可能である。
対象の二次元イメージを撮影するためのデュアルエネルギー又はマルチX線イメージングシステムは、以下を含むことができる。
(a)前方から後方へ物理的順序で、X線源、前方二次元X線検出器、ビーム選択装置、および後方二次元X線検出器を備え、前記対象は前記X線源と前記前方検出器との間に配置される、請求項1に記載の方法。
(b)前記X線源は、前記対象を通過するための2つ以上の異なるエネルギースペクトルを有するX線を放出するように適合され、前記X線は、前記対象との相互作用によって変化しない進行方向を有する一次X線と、前記対象との相互作用によって変化する進行方向を有する散乱X線と、を含む、X線装置。
(c)前記一次X線と前記散乱X線を受信する前記前方検出器。
(d)いくつかの前記X線のうち、前記ビーム選択機構を通過し、複数の選択された位置および複数の影状位置を有するX線を受信する前記後方検出器、および、
(e)前記ビーム選択装置は、前記影状位置への前記一次X線の通過を防止し、前記影状位置への前記散乱X線の通過を許容し、前記選択された場所への前記一次X線及び前記散乱X線の通過を許容する、ことを特徴とするX線源。
(a)前方から後方へ物理的順序で、X線源、前方二次元X線検出器、ビーム選択装置、および後方二次元X線検出器を備え、前記対象は前記X線源と前記前方検出器との間に配置される、請求項1に記載の方法。
(b)前記X線源は、前記対象を通過するための2つ以上の異なるエネルギースペクトルを有するX線を放出するように適合され、前記X線は、前記対象との相互作用によって変化しない進行方向を有する一次X線と、前記対象との相互作用によって変化する進行方向を有する散乱X線と、を含む、X線装置。
(c)前記一次X線と前記散乱X線を受信する前記前方検出器。
(d)いくつかの前記X線のうち、前記ビーム選択機構を通過し、複数の選択された位置および複数の影状位置を有するX線を受信する前記後方検出器、および、
(e)前記ビーム選択装置は、前記影状位置への前記一次X線の通過を防止し、前記影状位置への前記散乱X線の通過を許容し、前記選択された場所への前記一次X線及び前記散乱X線の通過を許容する、ことを特徴とするX線源。
前記X線源は、前記2つの異なるエネルギースペクトルのX線パルスを交互に放出してもよい。
X線イメージングシステムにおいて、前記ビーム選択装置は、軸を有する円筒の配列を含むことができ、前記円筒は、X線吸収性材料で構成され、無視できる程のX線吸収特性を有する材料で支持され、前記軸は前記一次X線の進行方向と平行であることを特徴とする、X線イメージングシステム。
X線イメージングシステムにおいて、前記ビーム選択装置の厚さは、およそ0.5mmから5cmの間とすることができる。
X線イメージングシステムにおいて、前記シリンダは、約1.0mmと約10mmとの間の直径、及び約2mmと約50mmとの間のピッチを有することができる。
X線イメージングシステムにおいて、前記後方検出器アセンブリは、一辺にほぼ多数の検出器セルからなる実質的に正方形又は長方形のマトリックスに配置された複数のX線感応性検出器セルを有する後方検出器配列を含むことができる。
対象の二次元イメージを撮影するためのデュアルエネルギーX線イメージングシステムは、以下を含むことができる。
(a)前から後ろに物理的な順序で、X線源、二次元X線検出器、ビーム粒子ストッパー装置。
(b)前記対象を通過するための単一のエネルギースペクトルのX線を放出するよう適合される前記X線源。前記X線は、前記対象との相互作用によって進行方向が変化しない一次X線を含み、そして前記X線は、前記対象との相互作用によってその進行方向が変化する散乱X線を含む。
(e)前記一次X線の前記影状位置への通過を防止し、前記散乱X線の前記影状位置への通過を許容し、前記一次X線および前記散乱X線の前記選択された位置への通過を許容する前記ビーム粒子ストッパー装置。および、
前記エネルギースペクトルは、約15keVから約250keVの範囲内の平均エネルギーを有することができる。
(a)前から後ろに物理的な順序で、X線源、二次元X線検出器、ビーム粒子ストッパー装置。
(b)前記対象を通過するための単一のエネルギースペクトルのX線を放出するよう適合される前記X線源。前記X線は、前記対象との相互作用によって進行方向が変化しない一次X線を含み、そして前記X線は、前記対象との相互作用によってその進行方向が変化する散乱X線を含む。
(e)前記一次X線の前記影状位置への通過を防止し、前記散乱X線の前記影状位置への通過を許容し、前記一次X線および前記散乱X線の前記選択された位置への通過を許容する前記ビーム粒子ストッパー装置。および、
前記エネルギースペクトルは、約15keVから約250keVの範囲内の平均エネルギーを有することができる。
前方検出器配列は、一辺が約2~約16384個の検出器セルで実質的に正方形又は長方形のマトリックスに配置された複数のX線感応性検出器セルを含むことができる。
ビーム粒子ストッパー装置は、X線吸収性材料で構成され、無視できる程度のX線吸収特性を有する材料によって支持されている要素の配列を含むことができる。
Xビーム粒子ストッパー装置は、X線吸収材料で構成され、無視できるX線吸収特性を有する材料によって支持されている要素の配列を含むことができ、ある場合では、ビーム吸収材料を密封して所定の位置に配置するように構成される。
xビーム粒子ストッパー装置は、移動体によって移動可能であることができる。
xビーム粒子ストッパー装置は、移動体によって移動可能であってよく、ビーム粒子ストッパー装置は、ホーム位置又は参照位置、位置A又はB又はC等の1又は複数の位置を有してよく、そこへ移動することができる。
いくつかの場合において、ビーム粒子ストッパーが一次X線を吸収する位置Aで、位置Bまたは位置Cのそれとは異なる場合がある。
ビーム粒子ストッパープレートが位置A又は位置BにあるときにX線吸収材料又は要素の影で収集された散乱イメージは、高解像度散乱イメージを導出するために補間されることができる。このイメージは、一次および散乱イメージの両方を含む検出器から取得されたイメージから減算され、一次のみのX線イメージを導出することができる。また、X線照射位置が同じであれば、位置Aと位置Bで取得したイメージを合成し、ビーム粒子ストッパーによるデータギャップのない高解像度の一次X線イメージを導出することもできる。また、位置C,Dのビーム粒子ストッパーがある場合などの追加イメージを追加してもよい。
いくつかの場合において、位置A又はB又はC等のそれの合成イメージが、検出器上の十分な信号のために必要な総露出量を有するように、ビーム粒子ストッパーの各位置において露出は著しく低減されることができる。
前記ビーム選択又はビーム粒子ストッパー装置の厚さは、約0.5mmから5cmの間とすることができる。
吸収材料のxビーム粒子ストッパー要素は、約0.1mmと約10mmの間の直径と、約2mmと約50mmの間のピッチを有することができる。
本開示は、二次元X線検出器を有するイメージングシステムを使用して対象のデュアルエネルギーX線イメージングを実行する方法を含むことができ、前記対象は、X線と異なる相互作用をする少なくとも2つの材料M.sub.A及びM.sub.Bから実質的に構成され、前記材料M.sub.Aは二次元投影質量密度Aを有し、前記材料M.sub.Bは二次元投影質量密度Bを有している。前記イメージングシステムは、前から後ろへの物理的順序で、デュアルエネルギー又はマルチエネルギーX線源と、(x,y)という表記によって特定される複数の検出位置を有する二次元X線検出器に平行なプレートの分散領域に複数のビーム吸収材料を有するビーム粒子ストッパープレートと、ビーム選択装置と、(i',j')という表記で特定される複数の影状後方検出位置と、を含むことができる。前記選択された後方検出位置と前記影状後方検出位置は、相互に独立であることができる。前記対象は、前記X線源と前記前方検出器との間に存在することができ、前記X線源は、前記対象を通過するための少なくとも2つの異なる平均エネルギーレベル、H及びL、でX線を放出するように適合され、前記X線は、前記対象との相互作用によってその進行方向が変化しない一次X線及び前記対象との相互作用によってその進行方向を変化する散乱X線を含む。前記検出器は、前記X線源から前記検出位置(i,j)に延びるX線投射線と交差する、(x(i),y(j))という表記によって特定される選択された検出位置を有することができ、前記ビーム粒子ストッパー装置は、前記一次X線及び前記散乱X線の前記選択された検出位置への通過を許容し、前記一次X線の前記影状検出位置への通過を防止し、前記散乱X線の前記影状検出位置への通過を許容することができる。本方法は、以下のステップを含むことができる。
(a)前記平均エネルギーレベルH;又はピークエネルギーレベルHを有する前記エネルギースペクトルのX線で前記対象を照らすこと。
(b)前記検出位置(x,y)から高解像度イメージI.sub.fHhを取得し、イメージI.sub.fHhを正規化し、暗信号などのノイズを減算し、及び/又はホワイトノイズを調整又は減算して、前記主X線及び前記散乱X線を含むイメージD.sub.fHh(x,y)をもたらす処理をすること。
(c)前記イメージD.sub.fHh(x,y)から、前記選択された検出位置(x(i),y(j))を表すイメージ D.sub.fHl (x(i),y(j))を生成すること。
(d)前記影状検出位置(i,j)から低解像度散乱イメージI.sub.rHslを取得し、前記イメージI.sub.rHslを正規化し暗信号を減算して、イメージD.sub.rHsl(i,j)をもたらす処理を行うこと。
(e)少なくとも1つの異なるエネルギーLのX線について、(a)~(d)を繰り返す。
(f)前記平均エネルギーレベルL又はLにエネルギーピークを有するエネルギースペクトルのX線で前記対象を照射すること。
(o)前記低解像度散乱イメージD.sub.fHsl(x(i),y(j))を補間によって前記検出器のイメージ領域全体に拡張して高解像度散乱イメージD.sub.fHsh(x,y)を計算することと、前記低解像度散乱イメージD.sub.fLsl(x(i),y(j))を補間によって前記検出器の前記イメージ領域全体に拡張して高解像度散乱イメージD.sub.fLsh(x,y)を算出すること。
p)前記イメージD.sub.fHh(x,y)から前記イメージD.sub.fHsh(x,y)を減算することによって前記検出器における高解像度一次X線イメージD.sub.fHph(x,y)を計算することと、
前記イメージD.sub.fLh(x,y)から前記イメージD.sub.fLsh(x,y)を減算することによって前記検出器における高解像度一次X線イメージD.sub.fHph(x,y)を計算すること。
(q)前記イメージD.sub.fHph(x,y)及びD.sub.fLph(x,y)は、前記散乱X線が実質的に除去された後に前記前方検出器で前記対象の高解像度、二次元、デュアルエネルギー一次X線イメージペアを形成することができ、前記イメージペアは、前記前方検出器から利用可能な最高の空間解像度に実質的に等しい空間解像度を有する。
(a)前記平均エネルギーレベルH;又はピークエネルギーレベルHを有する前記エネルギースペクトルのX線で前記対象を照らすこと。
(b)前記検出位置(x,y)から高解像度イメージI.sub.fHhを取得し、イメージI.sub.fHhを正規化し、暗信号などのノイズを減算し、及び/又はホワイトノイズを調整又は減算して、前記主X線及び前記散乱X線を含むイメージD.sub.fHh(x,y)をもたらす処理をすること。
(c)前記イメージD.sub.fHh(x,y)から、前記選択された検出位置(x(i),y(j))を表すイメージ D.sub.fHl (x(i),y(j))を生成すること。
(d)前記影状検出位置(i,j)から低解像度散乱イメージI.sub.rHslを取得し、前記イメージI.sub.rHslを正規化し暗信号を減算して、イメージD.sub.rHsl(i,j)をもたらす処理を行うこと。
(e)少なくとも1つの異なるエネルギーLのX線について、(a)~(d)を繰り返す。
(f)前記平均エネルギーレベルL又はLにエネルギーピークを有するエネルギースペクトルのX線で前記対象を照射すること。
(o)前記低解像度散乱イメージD.sub.fHsl(x(i),y(j))を補間によって前記検出器のイメージ領域全体に拡張して高解像度散乱イメージD.sub.fHsh(x,y)を計算することと、前記低解像度散乱イメージD.sub.fLsl(x(i),y(j))を補間によって前記検出器の前記イメージ領域全体に拡張して高解像度散乱イメージD.sub.fLsh(x,y)を算出すること。
p)前記イメージD.sub.fHh(x,y)から前記イメージD.sub.fHsh(x,y)を減算することによって前記検出器における高解像度一次X線イメージD.sub.fHph(x,y)を計算することと、
前記イメージD.sub.fLh(x,y)から前記イメージD.sub.fLsh(x,y)を減算することによって前記検出器における高解像度一次X線イメージD.sub.fHph(x,y)を計算すること。
(q)前記イメージD.sub.fHph(x,y)及びD.sub.fLph(x,y)は、前記散乱X線が実質的に除去された後に前記前方検出器で前記対象の高解像度、二次元、デュアルエネルギー一次X線イメージペアを形成することができ、前記イメージペアは、前記前方検出器から利用可能な最高の空間解像度に実質的に等しい空間解像度を有する。
前記投影線に沿った二次元投影質量密度A及びBは、前記イメージペアD.sub.fHph (x,y) 及び D.sub.fLph (x,y) から計算されることができる。
前記投影に沿って、質量密度A及びBは、デュアルエネルギーデータ分解法を用いて前記投影質量密度A及びBに対する非線形デュアルエネルギー方程式系を解くことによって算出することができる。
イメージペアD.sub.fHpl(x(i),y(j))及びD.sub.fLpl(x(i),y(j))は、以下のステップにより算出可能である。
(a)方程式系を用いた数値反転法によって、前記投影質量密度A及びBに対する非線形デュアルエネルギー方程式系を解くこと。
(b)前記A及びBの解を前記イメージの方程式に挿入する。
(a)方程式系を用いた数値反転法によって、前記投影質量密度A及びBに対する非線形デュアルエネルギー方程式系を解くこと。
(b)前記A及びBの解を前記イメージの方程式に挿入する。
イメージペアD.sub.fHpl(x(i),y(j))およびD.sub.fLpl(x(i),y(j))は、前方および後方検出器を使用する場合に直接定量関係を使用して前記イメージペアD.sub.rHpl(i,j)とD.sub.rLpl(i,j)から算出可能である。
イメージペアD.sub.fHpl(x(i),(j))及びD.sub.fLpl(x(i),y(j))は、ビームハード二ング及び高次効果に対する補正を伴う線形化近似法によってデュアルエネルギー一次X線イメージング方程式系を解くことによって前記イメージペアD.sub.rHpl(i,j)及びD.sub.rLpl(i,j)から算出可能である。
二次元X線検出器を有するイメージングシステムを使用して対象のデュアルエネルギーX線イメージングを実行する方法は、前記対象が、X線に対して、異なる相互作用する二つの材料M.sub.A及びM.sub.Bを含み得て、前記材料M.sub.Aが二次元投影質量密度Aを、前記材料M.sub.Bが二次元投影質量密度Bを有していることを特徴とするものである。検出器アセンブリは、以下を含むことができる。
(x,y)という表記によって特定される複数の前方検出位置を有する前方二次元X線検出器と、ビーム選択装置と、(i,j)という表記によって特定される複数の選択された後方検出位置を有する後方二次元X線検出器アセンブリと(i',j')という表記によって特定される複数の影状後方検出位置を有し、前記選択された後方検出位置及び前記影状後方検出位置は相互に独立している。あるいは検出器アセンブリは、以下を含むことができる。
(x,y)という表記によって特定される複数の検出位置を有する2次元X線検出器と、前記検出器上の影領域が(i,j)という表記によって特定される、前記検出器の分散領域におけるビーム粒子ストッパー装置。
前記対象は、前記X線源と前記前方検出器との間にあることができ、前記X線源は、前記対象を通過するためのX線を放出するように適合され、前記X線は、前記対象との相互作用によって変化しない進行方向を有する一次X線と、前記対象との相互作用によって変化する進行方向を有する散乱X線と、を含む。
前記前方検出器は、前記X線源から前記選択された後方検出位置(i,j)へ延びるX線投影線によって交差される、(x(i),y(j))の表記によって特定される選択された検出位置を有することが可能であり、この選択された検出位置は、前記X線源から前記選択された後方検出位置へ延びるX線投影線と交差する。前記ビーム選択装置は、前記選択された後方検出位置への前記一次X線及び前記散乱X線の通過を許容し、前記影状後方検出位置への前記一次X線の通過を防止し、前記影状後方検出位置への前記散乱X線の通過を許容することができる。前記後方検出器アセンブリは、前方から後方への物理的順序で、低エネルギー検出器、X線エネルギースペクトルフィルタ、および高エネルギー検出器を含むことができる。方法は、以下のステップを含むことができる。
(a)前記対象にX線を照射するステップ。
(b)前記前方検出位置(x,y)から高解像度イメージI.sub.fhを取得し、それを正規化し暗信号を減算するために前記イメージI.sub.fhを処理して、一次X線及び散乱X線からなるイメージD.sub.fh(x,y)をもたらすステップ。
(c)前記イメージD.sub.fh(x,y)から、前記選択された前方検出位置(x(i),y(j))を表す低解像度イメージD.sub.fl(x(i),y(j))を生成するステップ。
(d)前記高エネルギー検出器の前記選択された後部検出位置(i,j)から低解像度イメージI.sub.rHlを取得し、それを正規化し暗信号を減算するために前記イメージI.sub.rHlを処理してイメージD.sub.rHl(i,j)を生成するステップ。
(e)前記低エネルギー検出器の前記選択された後方検出位置(i,j)から低解像度イメージI.sub.rLlを取得し、前記イメージI.sub.rLlを処理して正規化し、暗信号を減算して、イメージD.sub.rLl(i,j)を生成するステップ。
(f)前記高エネルギー検出器の前記影付き後方検出位置(i',j')から低解像度散乱イメージI.sub.rHslを取得するステップと、前記イメージI.sub.rHslを処理して正規化し、暗信号を減算して、イメージD.sub.rHsl(i',j')を得るステップ。
(g)前記低エネルギー検出器の前記影状後方検出位置(i',j')から低解像度散乱イメージI.sub.rLslを取得するステップと、前記イメージI.sub.rLslを処理して正規化し、暗信号を減算して、イメージD.sub.rLsl (i',j')を得るステップ。
(h)前記低解像度散乱イメージD.sub.rHsl(i',j')を補間によって前記選択された後方検出位置(i,j)に拡張することにより、低解像度散乱イメージD.sub.rHsl(i,j)を算出し、
前記低解像度散乱イメージD.sub.rLsl(i',j')を補間によって前記選択された後方検出位置(i,j)に拡張することにより、低解像度散乱イメージD.sub.rLsl(i,j)を算出するステップ。
(i)前記イメージD.sub.rHl(i,j)から前記イメージD.sub.rHsl(i,j)を減算してD.sub.rHpl(i,j)を生成することにより低解像度一次X線イメージ対D.sub.rLpl(i,j)及びD.sub.rHpl(i,j)を算出し、
前記イメージD.sub.rLl (i,j)から前記イメージD.sub.rLsl (i,j) を減算してD.sub.rLpl (i,j) を生成するステップ。
(j)前記低解像度デュアルエネルギー一次X線イメージペアD.sub.rHpl(i,j)及びD.sub.rLpl(i,j)から低解像度一次X線イメージD.sub.fpl(x(i),y(j))を算出するステップ。
(k)前記イメージD.sub.fl(x(i),y(j))から前記イメージD.sub.fpl(x(i),y(j))を減算することによって低解像度散乱X線イメージD.sub.fsl(x(i),y(j))を算出するステップ。
(l)前記低解像度散乱イメージD.sub.fsl(x(i),y(j))を補間によって前記前方検出器のイメージ領域全体に拡張することによって、高解像度散乱イメージD.sub.fsh(x,y)を算出するステップ。
(j)前記イメージD.sub.fh(x,y)から前記イメージD.sub.fsh(x,y)を減算することにより、前記前方検出器における高解像度一次X線イメージD.sub.fph(x,y)を算出するステップ。
(k)前記イメージD.sub.fph(x,y)は、前記散乱X線が実質的に除去された後の前記前方検出器における前記対象の高解像度、二次元、一次X線イメージとすることができ、前記イメージは、前記前方検出器から利用可能な最高の空間解像度に実質的に等しい空間解像度を有する。
(a)前記対象にX線を照射するステップ。
(b)前記前方検出位置(x,y)から高解像度イメージI.sub.fhを取得し、それを正規化し暗信号を減算するために前記イメージI.sub.fhを処理して、一次X線及び散乱X線からなるイメージD.sub.fh(x,y)をもたらすステップ。
(c)前記イメージD.sub.fh(x,y)から、前記選択された前方検出位置(x(i),y(j))を表す低解像度イメージD.sub.fl(x(i),y(j))を生成するステップ。
(d)前記高エネルギー検出器の前記選択された後部検出位置(i,j)から低解像度イメージI.sub.rHlを取得し、それを正規化し暗信号を減算するために前記イメージI.sub.rHlを処理してイメージD.sub.rHl(i,j)を生成するステップ。
(e)前記低エネルギー検出器の前記選択された後方検出位置(i,j)から低解像度イメージI.sub.rLlを取得し、前記イメージI.sub.rLlを処理して正規化し、暗信号を減算して、イメージD.sub.rLl(i,j)を生成するステップ。
(f)前記高エネルギー検出器の前記影付き後方検出位置(i',j')から低解像度散乱イメージI.sub.rHslを取得するステップと、前記イメージI.sub.rHslを処理して正規化し、暗信号を減算して、イメージD.sub.rHsl(i',j')を得るステップ。
(g)前記低エネルギー検出器の前記影状後方検出位置(i',j')から低解像度散乱イメージI.sub.rLslを取得するステップと、前記イメージI.sub.rLslを処理して正規化し、暗信号を減算して、イメージD.sub.rLsl (i',j')を得るステップ。
(h)前記低解像度散乱イメージD.sub.rHsl(i',j')を補間によって前記選択された後方検出位置(i,j)に拡張することにより、低解像度散乱イメージD.sub.rHsl(i,j)を算出し、
前記低解像度散乱イメージD.sub.rLsl(i',j')を補間によって前記選択された後方検出位置(i,j)に拡張することにより、低解像度散乱イメージD.sub.rLsl(i,j)を算出するステップ。
(i)前記イメージD.sub.rHl(i,j)から前記イメージD.sub.rHsl(i,j)を減算してD.sub.rHpl(i,j)を生成することにより低解像度一次X線イメージ対D.sub.rLpl(i,j)及びD.sub.rHpl(i,j)を算出し、
前記イメージD.sub.rLl (i,j)から前記イメージD.sub.rLsl (i,j) を減算してD.sub.rLpl (i,j) を生成するステップ。
(j)前記低解像度デュアルエネルギー一次X線イメージペアD.sub.rHpl(i,j)及びD.sub.rLpl(i,j)から低解像度一次X線イメージD.sub.fpl(x(i),y(j))を算出するステップ。
(k)前記イメージD.sub.fl(x(i),y(j))から前記イメージD.sub.fpl(x(i),y(j))を減算することによって低解像度散乱X線イメージD.sub.fsl(x(i),y(j))を算出するステップ。
(l)前記低解像度散乱イメージD.sub.fsl(x(i),y(j))を補間によって前記前方検出器のイメージ領域全体に拡張することによって、高解像度散乱イメージD.sub.fsh(x,y)を算出するステップ。
(j)前記イメージD.sub.fh(x,y)から前記イメージD.sub.fsh(x,y)を減算することにより、前記前方検出器における高解像度一次X線イメージD.sub.fph(x,y)を算出するステップ。
(k)前記イメージD.sub.fph(x,y)は、前記散乱X線が実質的に除去された後の前記前方検出器における前記対象の高解像度、二次元、一次X線イメージとすることができ、前記イメージは、前記前方検出器から利用可能な最高の空間解像度に実質的に等しい空間解像度を有する。
デュアルエネルギーX線イメージングを実行するための方法は、前記イメージD.sub.fpl(x(i),y(j))が以下のステップによって算出されるようなものであってよい。
(a)方程式系を用いたデュアルエネルギーデータ分解法によって、前記投影質量密度AおよびBに対する非線形デュアルエネルギー方程式系を解くステップ。
(b)前記AおよびBの解を、前記イメージD.sub.fpl(x(i),y(j))=.intg.[.PHI.sub.0(E).×.S.sub.f(E)].×. exp(-(.mu. .sub.A(E).×.A(i,j)+.mu..sub.B(E).×.B(i,j))dE に対する方程式中に挿入するステップ。
(a)方程式系を用いたデュアルエネルギーデータ分解法によって、前記投影質量密度AおよびBに対する非線形デュアルエネルギー方程式系を解くステップ。
(b)前記AおよびBの解を、前記イメージD.sub.fpl(x(i),y(j))=.intg.[.PHI.sub.0(E).×.S.sub.f(E)].×. exp(-(.mu. .sub.A(E).×.A(i,j)+.mu..sub.B(E).×.B(i,j))dE に対する方程式中に挿入するステップ。
デュアルエネルギーX線イメージングを実行するための方法は、前記イメージペアD.sub.fHpl (x(i),y(j))およびD.sub.fLpl (x(i),y(j))が、直接定量的関係D.sub.fPl(x(i),y(j))=D.sub.fLPl[D.sub.rLpl (i,j)), D.sub.rHpl (i,j)]によって、前記イメージペア(D.sub.rLpl (i,j), D.sub.rHpl (i,j))から算出されるようなものでもよい。
前記デュアルエネルギーX線イメージングを実行する方法は、ビームハードニング及び高次効果の補正を伴う線形化近似法を用いてデュアルエネルギー一次X線イメージング方程式系を解くことにより、前記イメージD.sub.fpl(x(i),y(j))が前記イメージペアD.sub.rHpl(i,j)及びD.sub.rLpl(i,j)から求められてもよい。
本開示は、二次元イメージングシステムを使用した対象のデュアルエネルギーX線イメージングにおいてデータ分解を実行するための方法を含むことができ、前記イメージングシステムは、X線源と、(x,y)という表記で特定される離散的な検出器セルのマトリックスを有する二次元X線検出器と、前記検出器セルにおける前記対象の正規化された二次元のデュアルエネルギー一次X線イメージペアを決定する検出機構と、を含み、前記対象は、X線に対し、異なる相互作用をする2つの材料M.sub.A及びM.sub.Bによって表現され、前記材料M.sub.Aは、前記典型的なセルにおいて二次元投影質量密度A(x,y)を有し、前記材料M.sub.Bは、二次元投影質量密度B(x,y)を有し、前記A(x,y)及びB(x,y)は、前記X線源と前記検出器セル(x,y)とを結ぶ投影線に沿って定義される。前記検出器セル(x,y)の各々は、前記投影質量密度の関数としてのX線信号の観点から典型的なセル(x.sub.0,y.sub.0)によって表される可能性を有する。前記データ分解方法は、以下のステップを含むことができる。
(a)前記エネルギーレベルHとは異なる平均エネルギーレベルLで、前記検出器セルにおいて、平均エネルギーレベルHおよび二次元一次X線イメージ信号D.sub.L(x,y)において、前記検出器セルにおいて、平均エネルギーレベルHでの二次元一次X線イメージ信号D.sub.H(x,y)を決定するため前記検出を適用するステップ。
(b)第1の明示的な定量的関数ペアを構築するステップ。
(c)前記第1の関数ペアを数値的に反転して、第2の明示的な定量的関数ペアを得るステップ。
(d)前記検出器セル(x,y)のすべてについて、前記一次X線イメージ信号ペアD.sub.H(x,y)、D.sub.L(x,y)を前記第2の関数ペアの前記値D.sub.H(x.sub.0,Y.sub.0), D.sub.L (x.sub.0,Y.sub.0)に置換して前記対象の材料組成A(x,y)およびB(x,y)を算出するステップ。
(e)前記対象の前記材料組成物A(x,y)及びB(x,y)は、検出器セル(x,y)における前記投影線に沿った2次元投影質量密度イメージの組を表すことができる。
(a)前記エネルギーレベルHとは異なる平均エネルギーレベルLで、前記検出器セルにおいて、平均エネルギーレベルHおよび二次元一次X線イメージ信号D.sub.L(x,y)において、前記検出器セルにおいて、平均エネルギーレベルHでの二次元一次X線イメージ信号D.sub.H(x,y)を決定するため前記検出を適用するステップ。
(b)第1の明示的な定量的関数ペアを構築するステップ。
(c)前記第1の関数ペアを数値的に反転して、第2の明示的な定量的関数ペアを得るステップ。
(d)前記検出器セル(x,y)のすべてについて、前記一次X線イメージ信号ペアD.sub.H(x,y)、D.sub.L(x,y)を前記第2の関数ペアの前記値D.sub.H(x.sub.0,Y.sub.0), D.sub.L (x.sub.0,Y.sub.0)に置換して前記対象の材料組成A(x,y)およびB(x,y)を算出するステップ。
(e)前記対象の前記材料組成物A(x,y)及びB(x,y)は、検出器セル(x,y)における前記投影線に沿った2次元投影質量密度イメージの組を表すことができる。
前記方法は、以下の特徴のうちのいずれか1つ以上を含むことができる。
(a)前記第1の関数ペアD.sub.H =F.sub.DH (A,B), D.sub.L =F.sub.DL (A,B) は、基本デュアルエネルギーX線方程式に明示的定量形態で前記イメージングシステムのエネルギー依存関数sps.sub.H (E) および sps.sub.L (E) を与えることにより、構築可能である。
(b)前記関数sps.sub.H(E)は、前記X線源と前記X線検出器の間に厚さtの参照物質Mを使用する吸収法により個別に決定可能であり、前記エネルギーレベルHにおける狭ビーム一次X線信号値P.sub.H(t)を測定し、最小二乗法によるパラメータフィッティング法を用いて、方程式からsps.sub.H(E)を得る。
(c)前記関数sps.sub.L(E)は、前記X線源と前記X線検出器の間に厚さtの前記参照物質Mを使用する吸収法により個別に決定可能であり、前記エネルギーレベルLにおける狭ビーム一次X線信号値P.sub.L(t)を測定し、最小二乗パラメータフィッティング法を用いて、方程式からsps.sub.L(E)を得る。
(a)前記第1の関数ペアD.sub.H =F.sub.DH (A,B), D.sub.L =F.sub.DL (A,B) は、基本デュアルエネルギーX線方程式に明示的定量形態で前記イメージングシステムのエネルギー依存関数sps.sub.H (E) および sps.sub.L (E) を与えることにより、構築可能である。
(b)前記関数sps.sub.H(E)は、前記X線源と前記X線検出器の間に厚さtの参照物質Mを使用する吸収法により個別に決定可能であり、前記エネルギーレベルHにおける狭ビーム一次X線信号値P.sub.H(t)を測定し、最小二乗法によるパラメータフィッティング法を用いて、方程式からsps.sub.H(E)を得る。
(c)前記関数sps.sub.L(E)は、前記X線源と前記X線検出器の間に厚さtの前記参照物質Mを使用する吸収法により個別に決定可能であり、前記エネルギーレベルLにおける狭ビーム一次X線信号値P.sub.L(t)を測定し、最小二乗パラメータフィッティング法を用いて、方程式からsps.sub.L(E)を得る。
前記方法は、前記第1の関数ペアD.sub.H =F.sub.DH (A,B), D.sub.L =F.sub.DL (A,B) が、所望の範囲内のA及びBの値が既知の多数点における前記典型的なセル(x.sub.0,y.sub.0) に対するD.sub.HおよびD.sub.L値を直接測定して得られるようにされてもよく、前記D.sub.H と D.sub.L 値を連続領域に解析的に拡張されるようになっていてもよい。
前記デュアルエネルギー又はマルチエネルギーイメージング方法は、前記第1関数ペアD.sub.H =F.sub.DH (A,B), D.sub.L =F.sub.DL (A,B) から前記第2関数ペアA=F.sub.A (D.sub.H, D.sub.L), B=F.sub.B (D.sub.H, D.sub.L) への前記数値反転が以下のステップにより実施され得るものであってもよい。
(a)整数グリッド(A.sub.n,B.sub.m)上の連立方程式D.sub.H =F.sub.DH (A.sub.n,B.sub.m) およびD.sub.L =F.sub.DL (A.sub.n,B.sub.m) から、値の配列の第1のペアを算出するステップ,ここでA.sub.n =A.sub.0, A.sub.1,A.sub.2,...,A.sub.Nおよび B.sub.m =B.sub.0,B.sub.1,B.sub.2,...,B.sub.m は前記第1のペアの配列の整数インデクスであることを示す。
(b)前記連立方程式 D.sub.H =F.sub.DH (A.sub.n,B.sub.m) およびD.sub.L =F.sub.DL (A.sub.n,B.sub.m) を数値的に反転して、連立方程式A.sup.0 =F.sub.A.sup.0 (D.sub.H [j],D.sub.L [k])およびB.sup.0 =B.sub.B.sup.0 (D.sub.H [j],D.sub.L [k]) を得るステップ。
(c)前記連立方程式A.sup.0 =F.sub.A.sup.0 (D.sub.H [j],D.sub.L [k]) および B.sup.0 =F.sub.B.sup.0 (D.sub.H [j],D.sub.L [k])、
から配列の値の第2のペアを計算するステップ。ここで D.sub.H [j]=D.sub.H [0],D.sub.H [1],D.sub.H [2],...,D.sub.H [J] および D.sub.L [k]=D.sub.L [0],D.sub.L [1],D.sub.L [2],...,D.sub.L [k]は整数または実数であり、D.sub.H [j]<D.sub.H [j+1] かつ D.sub.L [k]<D.sub.L [k+1]であり、j、k、J、Kは前記第2のペアの座標配列の整数インデクスであることを示す。
(d)前記測定されたデュアルエネルギー信号データ対D.sub.H(x,y)、D.sub.L(x,y)のそれぞれについて、条件D.sub.H [j].ltoreq.D.sub.H (x,y).ltoreq.D.sub.H [j+1] および D.sub.L [k].ltoreq.D.sub.L (x,y).ltoreq.D.sub.L [k+1]に従って最も近いインデックスjおよびk値を決定し、次に、前記最も近いインデクスjおよびkから、前記連立方程式A.sup.0 = F.sub.A.sup.0(D.sub.H [j],D.sub.L [k])およびB.sup.0 =F.sub.B.sup.0(D.sub.H [j],D.sub.L [k])から前記A(x,y)およびB(x,y)を決定する。そして、
(e) 前記A(x,y)及びB(x,y)を方程式##EQU9##から提供される実数と同じぐらいの高精度に精錬すること。
(a)整数グリッド(A.sub.n,B.sub.m)上の連立方程式D.sub.H =F.sub.DH (A.sub.n,B.sub.m) およびD.sub.L =F.sub.DL (A.sub.n,B.sub.m) から、値の配列の第1のペアを算出するステップ,ここでA.sub.n =A.sub.0, A.sub.1,A.sub.2,...,A.sub.Nおよび B.sub.m =B.sub.0,B.sub.1,B.sub.2,...,B.sub.m は前記第1のペアの配列の整数インデクスであることを示す。
(b)前記連立方程式 D.sub.H =F.sub.DH (A.sub.n,B.sub.m) およびD.sub.L =F.sub.DL (A.sub.n,B.sub.m) を数値的に反転して、連立方程式A.sup.0 =F.sub.A.sup.0 (D.sub.H [j],D.sub.L [k])およびB.sup.0 =B.sub.B.sup.0 (D.sub.H [j],D.sub.L [k]) を得るステップ。
(c)前記連立方程式A.sup.0 =F.sub.A.sup.0 (D.sub.H [j],D.sub.L [k]) および B.sup.0 =F.sub.B.sup.0 (D.sub.H [j],D.sub.L [k])、
から配列の値の第2のペアを計算するステップ。ここで D.sub.H [j]=D.sub.H [0],D.sub.H [1],D.sub.H [2],...,D.sub.H [J] および D.sub.L [k]=D.sub.L [0],D.sub.L [1],D.sub.L [2],...,D.sub.L [k]は整数または実数であり、D.sub.H [j]<D.sub.H [j+1] かつ D.sub.L [k]<D.sub.L [k+1]であり、j、k、J、Kは前記第2のペアの座標配列の整数インデクスであることを示す。
(d)前記測定されたデュアルエネルギー信号データ対D.sub.H(x,y)、D.sub.L(x,y)のそれぞれについて、条件D.sub.H [j].ltoreq.D.sub.H (x,y).ltoreq.D.sub.H [j+1] および D.sub.L [k].ltoreq.D.sub.L (x,y).ltoreq.D.sub.L [k+1]に従って最も近いインデックスjおよびk値を決定し、次に、前記最も近いインデクスjおよびkから、前記連立方程式A.sup.0 = F.sub.A.sup.0(D.sub.H [j],D.sub.L [k])およびB.sup.0 =F.sub.B.sup.0(D.sub.H [j],D.sub.L [k])から前記A(x,y)およびB(x,y)を決定する。そして、
(e) 前記A(x,y)及びB(x,y)を方程式##EQU9##から提供される実数と同じぐらいの高精度に精錬すること。
<ROIまたはVOI>
ROI又はVOIの特定及び選択的測定、及び/又はこの方法を含む反復プロセスは、放射線被曝を低減し、及び/又はイメージ取得及び再構成を速め、達成可能な解像度及び感度を大幅に改善するために、個性化又はカスタマイズされたX線イメージング又はスペクトルイメージング又は断層撮影法又はCTを可能にすることができる。
ROI又はVOIの特定及び選択的測定、及び/又はこの方法を含む反復プロセスは、放射線被曝を低減し、及び/又はイメージ取得及び再構成を速め、達成可能な解像度及び感度を大幅に改善するために、個性化又はカスタマイズされたX線イメージング又はスペクトルイメージング又は断層撮影法又はCTを可能にすることができる。
<さらに調査すべきROI又はVOIの決定又は特定>
従来、関心領域(the region of interest)は、シングルエネルギー測定、又はデュアルエネルギー測定、又はマルチエネルギー測定によって特定又は決定されてもよく、時には材料分解又は3D又はCT又は多次元イメージング又はCTスライス又はスペクトルトモグラフィと結合されてもよい。ここに開示されるX線イメージ装置及び方法において、関心領域の決定は、以下のうちの1つ又は複数を含む方法によって達成され得る。
従来、関心領域(the region of interest)は、シングルエネルギー測定、又はデュアルエネルギー測定、又はマルチエネルギー測定によって特定又は決定されてもよく、時には材料分解又は3D又はCT又は多次元イメージング又はCTスライス又はスペクトルトモグラフィと結合されてもよい。ここに開示されるX線イメージ装置及び方法において、関心領域の決定は、以下のうちの1つ又は複数を含む方法によって達成され得る。
ユーザー入力。
デジタルプログラム。
例えば、1つの基準又はいくつかの基準に基づいて、予め決定される。
ここでは第1検出器又は第1検出器と呼ばれる1つ以上の検出器を用いた1つ以上のX線イメージのAI分析及び/又は測定値、又はリアルタイム測定値から得られる決定。
光学、超音波、MRI、PET、SPECT、物理測定、または化学もしくは電気化学測定を用いた位置決め、および/または距離、および/または単一、二次元もしくは多次元測定などの外部検知要素の分析、またはAI分析、または測定、またはリアルタイム測定から得られる決定。
空間、または周波数、または時間領域でSPRの1%未満または5%未満に散乱除去された1つまたは複数のX線イメージの解析、またはAI解析、および/または測定、またはリアルタイム測定から得られる決定、及び/又はSPRが1%未満又は5%未満である再構成された断層撮影イメージ。
本明細書に開示される方法及び装置を用いた、点、及び/又は一次元、及び/又は二次元、又は多次元の解析、又はAI解析、又は測定、又はリアルタイム測定から得られる決定。
材料分解データから得られる決定、例えば、本開示に記載の材料分解方法及び装置(又は本開示に基づく他の方法)を使用して、エネルギー感受性の検出器、合成、又は単一物質又は複合物質の別々のイメージの深層学習イメージを使用すること。
X線の多次元、3D、又は最大7D、及び/又は材料分解イメージを使用して、X線以外のモダリティを使用した介入、治療、監視、及び/又は追跡、及び/又は診断、及び/又は測定のためのイメージガイダンスを提供すること。
関心領域の測定は、以下の特徴のうちの1つ以上を含むことができる。
ROIは、例えば、ほぼ同じ空間位置、変化しない化学的状態又は物理的状態などの静的対象における静的ROIであってもよい。
ROIは、例えば、対象あるいは物体内の、コンポーネントあるいはターゲットの、監視あるいは追跡における動的状態、又はほぼ動的状態であってもよい。
ROIの測定は、以下の項目の1つ以上を含む装置及び方法によって達成され得る。
第1検出器を使用し、
同じ又は異なるX線源を使用し、
同じX線源を異なる設定、例えば異なる焦点スポットサイズ、または異なるX線放出位置で使用し、
フレームレート又は解像度、又はピッチサイズ、例えばビニングを伴うか伴わないかについて、異なる設定をして、第1検出器を使用し、
第1検出器の選択された領域または検出器の位置を使用し、
同じ検出器を,第1検出器の前方又は後方に配置された異なる検出器と組み合わせて使用し、
第1検出器のほぼ空間的な位置内に配置された異なる検出器を使用し、
ROIのX線測定を収集するために第1検出器を移動させた後に、第1検出器の空間位置に配置される異なる検出器を使用し、または、
光学、電気光学、光音響、非線形顕微鏡、OCT、PET、SPECT、MRIまたは圧力、運動測定、温度、電気生理学的、電気測定など、異なるモダリティを使用し、
そして、物体におけるROIの測定及び/又はROIの決定及びROIの特定は、同じ条件又は異なる条件に基づいて、その都度、相互に反復及び/又は繰り返されることができる。
第1検出器を使用し、
同じ又は異なるX線源を使用し、
同じX線源を異なる設定、例えば異なる焦点スポットサイズ、または異なるX線放出位置で使用し、
フレームレート又は解像度、又はピッチサイズ、例えばビニングを伴うか伴わないかについて、異なる設定をして、第1検出器を使用し、
第1検出器の選択された領域または検出器の位置を使用し、
同じ検出器を,第1検出器の前方又は後方に配置された異なる検出器と組み合わせて使用し、
第1検出器のほぼ空間的な位置内に配置された異なる検出器を使用し、
ROIのX線測定を収集するために第1検出器を移動させた後に、第1検出器の空間位置に配置される異なる検出器を使用し、または、
光学、電気光学、光音響、非線形顕微鏡、OCT、PET、SPECT、MRIまたは圧力、運動測定、温度、電気生理学的、電気測定など、異なるモダリティを使用し、
そして、物体におけるROIの測定及び/又はROIの決定及びROIの特定は、同じ条件又は異なる条件に基づいて、その都度、相互に反復及び/又は繰り返されることができる。
そして、毎回、ROIの決定のための条件、及び/又は物体内のROIの測定は、異なってもよく、及び/又は測定方法又は測定方法の組み合わせは、異なってもよく、又は同一であってもよい。
例えば、デュアル又はトリプルエネルギー又はマルチエネルギーイメージング法及び/又は材料分解法が、1つ又は複数のROIを決定するために使用される。
ROIの3次元又は多次元又は合成された2次元イメージを再構成するために、各ROIの3次元又は2次元イメージの低解像度が撮影される場合がある。得られた結果及び/又は情報は、次の測定セットのためにROIを再び決定するため、及び/又はどの測定方法が使用され得るかを決定するために使用されてもよい。例えば、ROIの深さに沿って以前よりも小さい寸法の未知のボクセルをより多く分解することによってより高い解像度を達成するために、前回よりも多くの回数の2Dイメージを撮影することによって、異なる解像度、例えばより高い解像度イメージを再構成することができる。X線放出位置は、以前の3Dイメージ再構成に使用された最初の測定値セットよりも小さなステップで進むことができる。
そして、1つ以上のボクセル内の物質または物質をさらに解像するために、スペクトルイメージまたはマルチエネルギーイメージまたは測定を行うことができ、および/または、マルチエネルギー測定から再構成された3Dイメージを導出して、ROI内のボクセルの属性をさらに明らかにし、ROI内の各ボクセルの測定感度を高めてもよい。
X線イメージを第1のイメージ及び/又は第1の測定値として使用することは、いくつかの場合において、造影剤によって認識される解剖学的マーカー又はターゲットのコロケーション、又は空間的近接によって、他のイメージング方法のモダリティと同じ場所に配置又は同時登録することができる。
光学的方法又は他のモダリティの方法の使用は、手術で追跡するためにX線イメージ方法と組み合わされてもよい。
VOIは、領域又は腫瘍のサブ領域であってもよい。VOIは、眼または眼の一部であってもよい。
密度測定、様々なエネルギーの検出器測定に相関する密度情報を導出するための補間は、2つ以上の検出器からの密度測定を相関させるために、様々な検出器で行われてもよい。様々な密度の1つ以上の共通の基準物質又は物質を用いて、第1検出器から第2検出器などの別の検出器への定量的関係が確立されている限り、データベース及び/又はエネルギー応答関数方程式系が1または複数の第1検出器で確立されてもよく、他の検出形式又は他のタイプのX線検出器で測定される物質の密度決定に使用されてもよい。
大きな関心領域(Large Region of Interest)及び/又は視野のイメージングが、1つのX線源が許容するものよりも大きくなり得る。
図21に示されるように、大きな関心領域2、例えば人間の全身イメージングの場合、2つ以上のエリア検出器(例えばD1、D2、D3、D4、D5)、及び/又は2つ以上のX線源(例えば12-1、12-2、・・・、12-5)が、点、又は2次元、又は複数又は3Dの関心領域全体の高速イメージ取得に必要となり得る。
例えば、各線源又は各線源+少なくとも1つの検出器は、X線源によって照射される関心領域2-1、2-2・・・2-5の対応する部分の3D又は多次元イメージングに使用されてもよい。
X線源の配置及び/又は移動、又はX線放出位置、又はX線ビームの操向は、6D空間における単一の軸に沿って、又は2D又は3Dの各軸、又は各軸の1つ以上の組合せであってもよい。
X線源の配置は、関心領域に面するパターン、例えば、螺旋パターンを形成してもよい。
X線源及び検出器の両方は、大きな関心領域に対する3D又は2D測定を完了するために、対象又は関心領域に対して1軸又は2次元又は6Dの少なくとも2軸で同期又は非同期に移動してもよい。
図21は、すべての線源からのX線信号を測定するために、複数のX線源、及びそれに対応して複数の検出器、又は2つ以上の検出器を含む非常に大きな検出器、又は大きな検出器を使用することを示す図である。
各X線源及び対応する検出器のペアは、点、線、2D及び多次元測定、又は3D測定、又は本明細書に記載の他の技法が可能である。測定の中には、一次比に対する散乱が1%未満であるものもあり、一次比に対する散乱が5%未満であるものもある。
大視野3Dイメージングも、少なくとも1つのX線源及び少なくとも1つのエリア検出器を含むX線測定モジュールのセットを、テーブル上に配置されて放射線透過性であるか、又はサンプルホルダによって保持されることができる対象に対して動かすことによって達成可能である。
X線測定は、他のイメージング技術によってさらに拡張可能であり、そのいくつかは、開示されたX線イメージング装置及び方法において説明されてきたものである。
異なる空間分解能又はスペクトル分解能、位相コントラスト、フーリエ変換、異なる速度又は異なるエネルギーレベル測定における追加の測定のために、様々な種類及びフォームファクタの追加のX線源、X線光学又は検出器が使用され得る。場合によっては、検出のために、強度計またはシンチレータ、光学およびカメラを含むX線および光測定装置が追加されることがある。
場合によっては、X線源と関心領域との間に、コリーメーティング、操向又は集束装置などのX線光学が使用されることがある。コンデンサー又は区域板が使用されてもよい。選択されたサイズのビーム開口が、関心領域のすぐ上流に配置されてもよい。ビーム開口を通過したX線は、直接X線検出器によって測定されてもよいし、または、対象の下流直下に対物レンズを置き、その上流または下流にシンチレータを置き、対物レンズまたはシンチレータから出るX線出力を検出器で測定することもできる。
X線源は、いくつかの場合において、対象のすぐ上流に配置されてもよく、対象からの出力X線は、カメラにX線出力を拡大しないエリア検出器又は増幅器、光学及び対物レンズ及び他の要素によって収集されてもよい。
X線波長範囲または光学範囲の位相コントラストまたは干渉計の光学が使用されてもよい。
<ROIの複数のセグメントまたは複数の部分>
X線源2及び/又は対応する検出器22は、複数の次元又は3D又はより多くの次元の測定を取得するために、mm又はサブmm単位で非常に小さな距離を移動することができる。例えば、X線源のみあるいはX線源と検出器のペアは、上部関心領域層と下部関心領域層との間の距離とほぼ同じ領域、あるいは深さと同じ、あるいは検出器に垂直な関心領域の深さにおいて一層多い。
X線源2及び/又は対応する検出器22は、複数の次元又は3D又はより多くの次元の測定を取得するために、mm又はサブmm単位で非常に小さな距離を移動することができる。例えば、X線源のみあるいはX線源と検出器のペアは、上部関心領域層と下部関心領域層との間の距離とほぼ同じ領域、あるいは深さと同じ、あるいは検出器に垂直な関心領域の深さにおいて一層多い。
X線源2及び対応する検出器22は、1mmより大きい寸法の距離又は領域又は体積で、又は同じX線源が関心領域の全体を照射し得るような寸法で移動してもよい。例えば、X線源の視野が関心領域全体にX線を投射できるほど大きくない場合、関心領域の第1のセグメント又は第1の部分の完全な3D又は1つ以上の2D測定が行われた後、X線源及び/又は対応する検出器が関心領域に対して相対的に移動してもよい。
第1のセグメント又は第1の部分は、関心領域に対するその第1の位置でX線が照射するものである。第1のセグメント又は第1の部分のイメージが撮影された後、かかるイメージの少なくとも1つは、1%SPR未満又は5%SPR未満に散乱除去されている。場合によっては、本明細書に記載の3D再構成方法を用いて、関心領域の第1のセグメント、又は第1の部分について多次元又は3Dイメージを構築することができる。場合によっては、そのような測定は、2つ以上のエネルギーのものであり、及び/又は位相コントラストイメージング測定であり、及び/又はここに開示されるX線イメージング装置及び方法に記載されるようなエネルギー摂動後又は摂動中に関心領域を測定するものである。
その後、X線源及び/又は対応する検出器は、対象又は関心領域に対して相対的に移動して、関心領域の異なる又は第2のセグメントを測定することができる。関心領域の第1のセグメント又は第1の部分に対して実行されたのと同様の1つ又は複数の測定が、第2のセグメントに対して実行されてもよい。同様に、第3のセグメント又は第3の部分が実行されてもよく、そのようにすることができる。
関心領域全体は、ROIの2つ以上のセグメント又は部分をつなぎ合わせることによって測定され、イメージが再構成される場合がある。
2つ以上のセグメントをつなぎ合わせることは、2つのセグメント又は部分が互いに重複する選択されたサブ領域を有するように定義される場合、解剖学的マーカーをマッチングさせることによって、又はいずれかのセグメント又は部分上のROIの選択されたサブ領域について、2つの異なるセグメント又は部分の重複する測定値をマッチングすることに基づいて実現されてもよい。
X線源及び/又は検出器の動きは、撮影されたイメージが端から端まで一緒につなぎ合わされるように正確に整列されることがある。そして、欠落したギャップがある場合、セグメントの境界上の隣接するピクセル又はピクセル領域からの値を、2つのセグメント又は部分の間の界面領域における欠落したピクセルに補間することができる。
セグメントまたは部分とは、ROIの一部分として定義される。そのような部分の組み合わせは、ROI全体を含むことができる。ROIは、2つ以上の部分及び/又はセグメントの単位に分割されることがある。ここで使用されるセグメントは、重複する異なる組織成分へのROIのセグメンテーションと同じことを意味しないかもしれない。ここで使用されるセグメントは、空間的にROIが部分又はセグメントに分割され、それぞれが他の部分又はセグメントから独立して、同じ投影によってX線ビームによって照会され、検出器上に収集されることができる結果をもたらす。本章の開示におけるそのようなセグメント又は部分は、互いに重なり合う多数の組織タイプ及び構成要素を含むことができる。より正確な定義では、セグメントは、それが同じX線投影経路、例えば検出器上の対応する画素に達する投影線によって照明され測定されるものであっても、それぞれが残りから分離することができる明確な特性を有するポストイメージ取得、材料分解及びROIのセグメントへの分割などの他の設定において使用されてもよく、このシナリオをよりよく説明するために、部分という用語を使用することができる。
少なくとも1つの追加のX線源及び/又は少なくとも1つ以上の追加の検出器が、さらなる調査のために第1の関心部分上の1つ以上の選択されたターゲットを測定するために使用及び/又は移動されてもよい。X線源又は検出器は、関心領域上で実行された第1又は第1セットの測定で使用されたX線源又は検出器とは、サイズ、解像度、速度及びエネルギーレベル又は波長が異なる場合がある。
いくつかの例では、各X線源は、複数の検出器によって測定される関心領域を照明するX線ビームを生成することができる。或いは、図25に示されるように、1つの場所における1つ以上のX線源は、身体全体を照明することができる。検出器は、2つ以上の検出器をつなぎ合わせて使用することができ、あるいは、大きな検出器が、全身である対象全体をカバーすることができる。あるいは、検出器及び/又は線源と検出器のセットを移動させて、対象全体であるROIの異なる部分をカバーすることができる。例えば、対象が人体全体である場合、対象全体が撮影されるまで、線源及び検出器は、一度にROIの1つの部分を撮影することができ、他の部分を撮影するために撮影工程を反復することができる。ポータブル大視野X線イメージングシステムは、視野を拡大することが可能である。撮影された対象2が置かれる、放射線透過性病院ベッド又は、サンプルホルダ40のような放射線透過性テーブル又は支持機構を備える。X線は、線源12から放出され、関心領域で対象2を照射し、ビーム粒子ストッパープレート100及び検出器22を通過および到達することができる。
図30に示すように、検出器22をモータ駆動化し、及び/又はX線源12を空間的にモータ駆動化して、例えば、人体全体又は貨物及びウエハ製造機などの大きな対象物の異なる領域をイメージングすることができる。対象2は、線源12と検出器22との間に配置される。線源、検出器、及び移動体を接続する機械的構造(例えば、ビーム、アーム、又はその他)104が存在してもよい。
線源12を駆動するモータは、本開示で説明するように、3D又は多次元イメージを構築するために線源又はX線放出位置を小さな寸法で動かしてもよい。
場合によってはより細かいステップでX線放出位置を移動させるために、支持構造104の同じ空間位置に異なるモータを搭載してもよい。
電磁操向装置が同じ構造体104に取り付けられ、ターゲットに到達する前に電子ビームを操向してX線放出位置を移動させるために使用されてもよい。
例えば、1つの大型検出器D5、は、複数のX線源2-1・・・2-5から来るX線を測定してもよく、各線源は関心領域12の一部を照射している。
<ROIの3Dプリントとディスプレイのためのデータ>
印刷、有体物質を用いた3D印刷、及び電子ディスプレイ、コンピュータモニタ又はスクリーンディスプレイなどの透明ディスプレイ、投影及び投影ディスプレイ、又は3Dディスプレイは、本開示に記載の装置及び方法を用いた測定に基づいて又は派生して又は合成されてもよい。
印刷、有体物質を用いた3D印刷、及び電子ディスプレイ、コンピュータモニタ又はスクリーンディスプレイなどの透明ディスプレイ、投影及び投影ディスプレイ、又は3Dディスプレイは、本開示に記載の装置及び方法を用いた測定に基づいて又は派生して又は合成されてもよい。
現在開示されている方法及び装置に基づいて測定又は合成又は再構成されたX線イメージは、元の対象及び/又は関心領域の類似又は変形した1つ又は複数の材料を用いて、関心領域又はターゲット又は対象の3D印刷に使用されてもよい。3D印刷は、関心領域又は対象を表現するための1つ又は複数の材料を含む印刷ツール又は施工ツールを含む機械によって行われてもよい。
<3Dおよび断層撮影の再構成>
再構成に使用されるイメージは、SPRが1%未満又は5%未満となるように、主に一次X線イメージ及び/又は測定値を含んでもよい。
再構成に使用されるイメージは、SPRが1%未満又は5%未満となるように、主に一次X線イメージ及び/又は測定値を含んでもよい。
断層撮影の再構成の例と再構成のためのデータの準備について、以下に説明する。
ROIが決定され、断層撮影イメージを撮影するコマンドがユーザーによってマイクロプロセッサに送られるか、デジタルプログラム又はコマンド又はアルゴリズムによって作られ、シングルエネルギー及び/又はスペクトルイメージングコマンドが作られる間、VOIは、x、y zの座標でVOIの境界を決めることによって断層撮影用に定められる。VOIの厚さは、ユーザーによる測定によって決められるか、飛行時間センサーなどのセンサーを用いて、X線放出位置までのVOIの上面の距離が測定されてもよい。サンプルホルダの上面から検出器の表面までの距離は既知であるため、それゆえVOIの厚さが決定される。
投影イメージが撮影された後、サンプルホルダ、ビーム粒子ストッパープレート、及び検出器とVOIの間にあるその他の減衰物質から、検出器測定に対する所定の寄与が、別々に決定され、特徴付けられることがある。場合によっては、これはピクセル単位であってもよい。
VOIは、物体の厚さの中に埋め込まれた内部VOIであってもよい。この場合、X線放出位置に最も近いVOIの上の体積であるVai、又はVOIの底に最も近いVOIの下の物質体積であるVbiは、別々に又は異なって、及び/又は以前に再構成されたイメージ、又は他の再構成技術を使用してVOIに対するものとは少なくとも部分的に異なる技術で決定されてもよい。
マルチ開口装置(MADs)は、広範囲のフルエンスパターンを提供することができるシーケンシャルバイナリーフィルタであり、線源と物体の間に配置され、VOI(そのいくつかは軸ずれしていてもよい)を選択するために比較的小さな動作で動的に調整されることができる。
再構成に関連する情報は、空間投影ジオメトリを含めて、マイクロプロセッサに保存されることがある。
投影イメージの撮影時に、空間投影ジオメトリは、VOIの中心および検出器に対するX線放出位置の空間位置を関連付けるために使用される。このような空間投影ジオメトリは、例えば、以下に説明するように定義することができる。
X線放出位置が検出器に平行なx y平面上を移動する場合、3自由度を有する1つの座標を使用して、X線源、物体及び/又は検出器のすべての空間位置及び相対的移動を記述することができる。X線源とVOIの中心との距離が定義されてもよく、検出器の中心軸とVOIの中心との距離が定義されてもよい。
X線源及び/又は検出器のより複雑な動きのために、相対的な回転運動が関与する場合など、追加の座標が、X線源又は検出器のそれぞれについて、回転座標が使用されてもよい。
焦点サイズ、エネルギーレベル、流動、露光特性、中心軸、検出器ピクセルピッチサイズ、要素数、検出器の空間位置などのX線源情報は、本明細書に開示するX線システムのメモリ装置に格納されてもよい。
撮影された投影イメージに対する再構成に関与するパラメータに関する情報をマイクロプロセッサに格納するために、メタファイルを生成してもよい。
システムマトリックスは、X線放出位置、X線ビームの中心軸、例えばX線コーンビームの中心軸、SID(線源12から検出器モジュール22までの距離)、関心領域を照明するための線源及び/又は検出器のペアの移動及び/又はアライメントの空間位置又は相対空間位置のモデルを設計することが可能である。線源及び検出器に対するボクセル位置の設定、例えば、中心軸に対する検出器上の投影位置であるu、v、検出器の中心軸に対するX線源中心軸のオフセットであるu0、v0を決定するための設定。X線源の移動を表す式は、その第1要素及び第2要素をX線源の座標変換としたベクトルであってもよい。
X線源及び/又はX線検出器の空間的位置及び/又は移動、並びにVOIの移動に基づいて、マイクロプロセッサは、異なるハードウェアの移動及び相対的空間位置に対する自由度を記述できる座標の数を決定することができる。
ビームハードニング効果を低減するために、場合によっては、X線放出位置の下流で、線源と対象物の間に、アルミニウムや銅などのフィルタを使用することができる。
投影イメージから断層イメージを再構成するために、以下のステップを含むことができる。第1のステップでは、VOI内の各ボクセルをゼロ又は1の値に設定して、ボクセルの減衰係数の範囲をほぼ定義してもよい。減衰係数の値の閾値を使用して、そのような値を1またはゼロに設定してもよい。用途及び要求される精度に応じて、X線源に対するある空間位置におけるボクセルの実際の減衰係数値に寄与し得る様々な因子が考慮されてもよい。例えば、その要因は、X線管、陽極のタイプ、X線管の設計、検出器、及び特定のボクセルより上流のROI内のボクセルの減衰における寄与、及びある厚さのサンプルを通るコーンビームの拡大ファクタ、ある空間位置における所定の体積の光流入変動、及び線源からのある距離における光子変動数、ある組成又は減衰値の物質又は事柄との相互作用を含むことができる。
放射線治療、X線イメージング、核イメージング、SPECT、電子顕微鏡、光線追跡法などで用いられるモンテカルロ法などのシミュレーション手法を利用してもよい。例えば、ARTに基づく決定論的アプローチが利用されてもよい。再構成法には、モンテカルロ法と決定論的手法の両方が組み合わされることがある。X線放出位置移動及びX線測定が実行され、未知のボクセルが、ボクセルの減衰範囲に基づく定義に応じて1又は0のいずれかである多数の線形方程式に基づいて解決されることが可能である。例えば、骨は1の値を割り当てられ、軟組織は、透過性であることに等しい0の値を受け取ることができる。
検出器は、ROIの2D投影イメージを測定する。同じROIが、その対応する検出器の中心軸に対して様々なX線放出位置で測定される。検出器の中心軸に対するX線放出位置の総移動は、X線コーンビーム、X線放出位置、ROI、及び検出器によって定義される中心軸のそれらの第1の位置から10度未満、又は5度未満、又は2度未満又は1度未満離れることができる。ボクセルの減衰係数値は、ART又はARTの派生物及び/又は代替のシミュレーション方法を用いて、それぞれが閾値を超える又は下回る減衰値を表す1又は0の値を有するように解決されてもよい。閾値は、骨と軟組織のような2つの材料を分離する特定の減衰係数の値に設定されてもよく、あるいは、造影剤を背景組織のものから分離してもよい。このプロセスは、シミュレーションされた投影測定値と実際の投影測定値が収束するまで、閾値を調整し続ける反復プロセスであってもよい。
従来のCTイメージ及びトモシンセシス、Cアーム又はOリング、及び再構成方法の派生物は、取得したイメージから再構成するために、前記した投影ジオメトリと共に使用されることができる。本明細書に開示されたシステム及び方法と、従来のCT、及び他のX線イメージング多次元イメージングとの間の差は、以下を含むことができる。
空間幾何学的マトリックス又は構成における投影ジオメトリの変換及び/又は計算。従来のCT的技術は、典型的には、より複雑なジオメトリを有する。
従来のCT的技術では、再構成のための反復アルゴリズムが、ノイズの多いジオメトリの成果物を持つことがある。
従来のCT的技術では、投影イメージが散乱によりノイズを含み、そのため各ボクセルの初期推定減衰係数値により再構成時間が延長される。
ある種の一般に認められたアルゴリズムは、大角度回転投影ジオメトリのためのものであるため、従来のCT的技術では使用されないかもしれない。
X線放出位置は、ROIに対する線源と検出器との距離及び相対的な平面位置がほぼ同様又は同じである、xy平面内で移動することができる。その結果、幾何学的マトリックスは、この動きを記述するように修正される。3つの変数を持つベクトル表現が得られる。最初の2つは、x方向とy方向の動きを記述する。第3の変数は、z軸におけるX線放出位置の移動に関連する可能性がある。
場合によっては、第1の線源と同じ空間位置で同じVOIの測定のために、「第2」または「第3」線源として示される、より多くのX線源が使用されることがある。第2の線源が第1の線源の同じ位置からVOIのイメージを投影するために移動される場合、例えば、第2の線源が異なるエネルギーレベルのX線ビームを放出する場合、断層撮影再構成は、複数のエネルギー測定を提供する第2の投影イメージのセットを用いて行うことができるので、各ボクセルに対する減弱係数をより正確に導出し、及び/又は反復をより少なくすることが必要である。
従来のスペクトルCTのような線源と検出器のペアを使用するスペクトルX線イメージングシステムの場合、線量と放射線被曝量は、シミュレーション方法によって求めることができる。
各ボクセルの減衰係数定数及び/又は各ボクセルの減衰量は、シミュレーションツールから得られたその値に基づいて、実際の重み付け値により修正されてもよい。ボクセルがROIのどの層に存在するかによって、各ボクセルの加重値とその元の値との組み合わせは、修正された減衰係数又は減衰値Xを生じさせることができるが、このような値Xは、減衰値又は減衰係数定数の関数である。
各エネルギーにおいて、このようなボクセル値が決定されてもよい。この情報は、ROI内の体積をセグメント化し、密度及び厚さを決定し、未知物質を特徴付け、各物質及び複合物質を特定及び視覚化するために使用されてもよい。
再構成モデルの一例として、ARTとその導関数に基づく再構成法、またはモンテカルロシミュレーション法、あるいはその両方を組み合わせて使用することが挙げられる。この例では、モデルに従ってデータを情報とノイズに分解するために、局所的な信号対ノイズ比分析を実行する統計的モデリングが含まれる。この場合、本開示のような従来のCTと比較して、散乱の干渉が5%未満または1%未満に除去されているため、データは散乱ノイズを含まない場合がある。そのため、散乱除去法が一次X線の1%以上と推定される場合には、散乱を考慮することができる。しかしながら、ダイナミックレンジに影響を与える散乱の寄与による一次X線の測定された信号対雑音比の減少のために、このステップは、場合によっては必要とされるかもしれない。
散乱とは異なる他の種類のノイズが存在する場合がある。散乱以外のノイズを除去するために、ポストイメージ取得と再構成処理が必要な場合がある。
計測された散乱値は、情報または期待される投影イメージを抽出するために、シミュレートされた散乱値の代わりとして使用される場合がある。導出された投影イメージに散乱がないこと、および材料分解により、場合によっては、再構成が補正のための反復プロセスを必要としない可能性がある。調整は、その都度行ってもよい。
再構成方法は、X線投影シミュレーション及びモデリングを行うために使用されるモンテカルロシミュレーション又はシミュレーション方法を含んでもよく、これは、いくつかの例では、減衰値の範囲に対してボクセル値をゼロ又は1に設定し、各ボクセル単位での値を検出器で測定されるものにそれぞれ相関させることと組み合わせてもよい。
空間的及び時間的なビームプロファイルが監視されてもよい。
各ボクセルVxyzは、設定された数のサブユニットを含んでもよい。
各サブユニットSubは、特定の寸法であってもよい。関心体積又は関心領域内の各ボクセルには、定量的に記述されてもよい空間的関係又は位置を有し、
例えば、検出器および/または特定の1または複数のピクセルまたは1つ以上のピクセルを含む測定領域、および/またはX線源および/またはX線源の中心軸に対する距離および/または空間座標によって定量的に記述され得る空間的関係または位置を有し、
検出器又は任意の参照及び/又は任意の空間的参照及び/又はイメージ化された又は測定された対象の一部又は全体に対して垂直な方向である。
各サブユニットSubは、特定の寸法であってもよい。関心体積又は関心領域内の各ボクセルには、定量的に記述されてもよい空間的関係又は位置を有し、
例えば、検出器および/または特定の1または複数のピクセルまたは1つ以上のピクセルを含む測定領域、および/またはX線源および/またはX線源の中心軸に対する距離および/または空間座標によって定量的に記述され得る空間的関係または位置を有し、
検出器又は任意の参照及び/又は任意の空間的参照及び/又はイメージ化された又は測定された対象の一部又は全体に対して垂直な方向である。
各ボクセルのこのような定量的関係は、ボクセルを定義するパラメータの1つであってよい。ボクセルは、その組成に基づくX線測定値を有していてもよい。各ボクセルの組成及びその周囲にあるものに対するその空間的位置は、検出器、イメージされた対象又はイメージされた対象の解剖学的マーカー、又は時には検出器であってもよい外部参照オブジェクト、又は線源、又はX線放出位置によって定義される中心軸のような抽象的オブジェクト、又は検出器及び/又はイメージされた対象の一部若しくは全体を含むことができる。
一例として、X線放出位置がx軸、y軸、z軸、または時間マーカーを含む6d空間的または7d位置で移動すると、特定のボクセルVxyzは移動しないことがある。しかし、X線放出位置の中心軸は移動する可能性がある。特定のボクセルVx,y,zに対応する検出器のピクセルまたは領域は、同じであっても異なっていてもよい。
特定の空間位置のボクセル又はボクセルの一部と、X線放出位置の移動に伴いかかるボクセル又はボクセルの一部を通過するX線信号を測定する検出器上の対応するピクセル又はピクセル領域が、記録され、追跡される。ボクセルの部分は、ボクセルのパーセンテージとして記述されてもよい。該部分は、多数のサブユニットによって記述されてもよく、ピクセル又は検出器の領域の測定に寄与し得る部分に含まれてもよい。例えば、ボクセル、Vxyzが1umの100個のサブユニットを有する場合、ボクセルの一部は、ボクセル空間位置、X線放出位置及び測定を行う検出器の領域によって定義されるX線照射経路によって決定されるピクセル又は検出器の領域上の測定に貢献し得る64又は10のサブユニットを含んでもよい。
特定のボクセルV xyzの電磁的測定値及び/又は他の物理的又は化学的特性又は測定値又はシミュレーションされた特性は、検出器のピクセルの測定値と空間的関係に関連付けられる。かかるデータは、定量的イメージング、定性的イメージング、材料分解及び/又は多次元イメージング又は断層撮影又はトモシンセシスのための再構成方法などの解析のためのデータの一部として使用される。
関心体積、または関心体積VOI内のボクセル、またはVOI及びその境界を含む関心領域は、例えば、位置a、b、c、dにコーナーを有する境界で記述される断面において、X線照射経路及び検出器測定領域によって記述され得る。境界の空間形状は、対称であってもなくてもよい。例えば、線源に最も近い最上層のbからCまでの距離で記述される寸法は、検出器に最も近い最下層の寸法の一部を記述するadより小さくてもよい。
<再構成の例-体積データの3D構築>
X線ビームは円錐形であるため、X線源に最も近い関心領域は、検出器に最も近い関心領域よりも小さくなる場合がある。または、X線源に近い関心領域からボクセルまたはボクセルを照射するX線は、測定時に検出器上のより大きなエリアに投影される可能性がある。
X線ビームは円錐形であるため、X線源に最も近い関心領域は、検出器に最も近い関心領域よりも小さくなる場合がある。または、X線源に近い関心領域からボクセルまたはボクセルを照射するX線は、測定時に検出器上のより大きなエリアに投影される可能性がある。
例えば、関心領域ROI total (x, y)は、線源に近い対象の表面から検出器に近い対象の表面まで延びる体積を含んでもよい。
図19及び図20に示すように、ROI total (x, y) = R1 +R2 +...Rp であり、各RはX線投影経路に沿った関心領域内の別個の層である。例えば、Zに沿った深さが20cmであり、ボクセルの分解能が必要であり、Xzが200umである場合、1000個のデータ点又はボクセル未知の層が分解能される必要がある。
例えば、線源から検出器までの距離、SIDが1mで、X線源に最も近い関心領域R1が32cmで、ROI R1の下流の関心領域Rnが40cmの場合、R1からすべての関心領域を捕らえるために、検出器領域は少なくとも40cmであってもよい。R1のすぐ下流の関心領域層であるR2は、R1と同様であってもよいが、例えばr1の×1.00004と若干大きくてもよく、場合によっては無視できるかもしれないが、Rpは著しく大きく、ここで、厚さまたは解像度がそれぞれ等しい関心領域層が1000層あればpは1000とする。
図19に示されるような一例では、X線コーンビーム角α=ArcTan(20cm/100cm)=0.1974である。
各軸に沿って、各ピクセルが200umであるとすると、関心領域の最後の層において、検出器上の20cm/200um = 1000ピクセルまたは検出器に最も近い関心領域の層で1000ボクセルが存在することになる。検出器ピクセルのエリアサイズxyは、約200um x 200um = 40,000um2 である。
X線源に最も近い関心領域の最上層のX方向の寸法と、関心領域の最下層Rpの寸法の比は
比l=16cm:20cm=0.8/1である。
比l=16cm:20cm=0.8/1である。
X線源に最も近い関心領域の最上層R1におけるxy次元でのエリアサイズと最下層Rpにおけるエリアサイズ比は
比a=0.82:1 2=0.64:1である。
比a=0.82:1 2=0.64:1である。
この例では、図19に示すように、最上層のボクセルと最後の関心層のボクセルのエリアサイズ比は、関心領域内の最下層のボクセルサイズの約0.64となる。例えば、X線ビームが最上層の隣接する64個のボクセルを通過するとき、コーンビームの性質上、同じビーム経路が関心領域を進む際に拡大され、検出器上の約100ピクセルのエリア領域に投影される。同じビーム経路で照射された関心領域のz方向に関する下層は、約100ボクセルである。
この例では、0.64×M1000=1 ここで、Mは関心領域内のある層から、それに隣接し、その上にある層までの拡大ファクタを示す。(M-1)は非常に小さいかもしれないので、zに関するすぐ隣の層はおよそ同様であるかもしれない。しかし、関心領域の最上層と最下層の間であれば、拡大ファクタはより大きくなる。
図20において、最上層のxy方向におけるボクセルの相対サイズ、またはzに関してX線源に最も近い第1層対最下層の相対サイズ、(投影されたのと同じX線ビームにつき関心領域におけるz方向に並んだp番目の層Rp、は検出器上のほぼ1つのピクセルに信号を生成する)、は0.64:1である。
R1...R2からの異なるボクセルを相関させる方法は1つ以上存在する。
例えば、R1内の各ボクセルRf1が互いに隣接する64個の異なる2次ボクセルユニットRsでできていると仮定すると、Rpの各ボクセル、Rfpは、約100個の異なる2次ボクセルユニットRsを含むことができる。1つのボクセルRf1における全てのRsによるX線ビームの減衰値の総和、これに対応して同じ入力X線ビームによって照射されたRpのボクセルRfpにおけるRsを通過したX線ビームの減衰値の総和、およびRf1とRp1の間にあるいずれかのボクセルは、X線出力の最終的な信号レベルに寄与することができ、この信号レベルは、Rfpの直下にある約 1 ピクセルピッチのサイズの検出器領域 d (x, y) に投影され、測定される。場合によっては、Rf1 を通過したX線の投影の中心は、検出器領域の中心に到達し、これがピクセルのアクティブセンターとなることがある。
いくつかの実施態様では、二次ボクセル単位の各々は、更に小さなボクセル単位Rt又はRqに分割することができる。
各二次ボクセルは、線源、R1...Rpのボクセル、及び他の二次ボクセルに対する関係及び位置を指定するために、番号が付けられるか、又はそれに関連する識別子を有することができる。
各層の未知のボクセルRfを解く場合、1つまたは複数の二次ボクセル、またはRfボクセルのセグメントの組み合わせが解かれてもよく、場合によっては、そのそれぞれまたはすべてが、隣接エリアまたは隣接関心領域の二次ボクセルと組み合わせて、1つまたは複数の関心領域の層における完全な個々のRFを導出するために使用されてもよい。
多次元イメージ再構成のための異なる実施例は、ボクセル単位として検出器又は1つの検出器ピッチに最も近い最大のボクセルを仮定してもよい。線源に近い関心領域内のボクセルは、ボクセル単位の一部であってもよい。このような分割されたボクセル指定は、Rf1=0.64Rfpのように使用されてもよい。
各検出器ピクセルは、X線入力ビームが関心領域の各層のボクセルを通過した結果としてのX線信号を測定してもよい。第二ボクセル又は第一ボクセルのxy位置は、特定のX線投影経路に対応するx y座標値、及びX線測定値又はX線測定値を有していてもよい検出器ピクセルに相関させることができる。
いくつかの場合、zに並んだどの関心領域層がボクセルRFであるかを指定する第3の値が存在してもよい。
図20に示されるように、解決すべき各Rfは、したがって、3軸座標(X、Y、Z)で記述され得る。ただし、x,yの値は、検出器に対するその真の空間位置と同じとは限らず、関心領域の最上層のボクセルサイズRf、R1または関心領域の最下層のボクセルサイズRpと比較して拡大ファクタまたは縮小ファクタMを考慮した調整値である。
代替的又は追加的に、関心領域内の各ボクセルのRFは、真の空間座標で表すこともできる。データベースCは、各ボクセルと、それが存在する関心領域層におけるその隣接するボクセルとの間の関係、及びそれが存在する場所以外の関心領域層におけるボクセルとの間の相対的な関係を含むことができる。各層からのボクセルRFの各々は、他の層のそれとの相関を有していてもよい。
X線放出位置またはX線源が移動すると、データベースCは、関心領域のボクセル同士の関係の新しいセットを相関させる。
各ボクセルRfまたはRsはまた、各波長またはエネルギーレベルに関連付けられた、減衰係数、または減衰係数およびボクセルのサイズに基づく値、を有してもよい。また、定量的かつ決定論的に、あるいは統計的に、ある値、ある値群、ある範囲値を、1つ以上のシミュレート物または組成ボクセルに係る1つ以上の材料、物質、成分、または合成物と関連付ける別の参照データベースが存在してもよい。
場合によっては、X線源が一方向に、例えばx、y、zにおいてピクセルごとに線形に移動し得るか、又はX線源が角度モダリティの空間において移動し得るとき、毎回、対象に交差する異なるX線投影経路が導入される。本明細書に開示されるシステムは、同時に、導入される新たな未知数の量を最小化し、又は少なくとも投影経路における未知ボクセルの数を可能な限り減少させることができる。このような投影に基づく形状計算は、3Dイメージ再構成のために使用され得る。
各X線源の移動、またはX線操向角において、検出器に到達して同時に測定可能な新しいX線照射経路のセットを含む新しい投影線があり、各移動ステップで導入される未知数の数、又は3Dイメージングプロセス全体で導入される未知ボクセルの集約数は、従来の方法によるフラットパネル検出器を用いた3Dイメージングで導入されるものと比較して、減少及び/又は最小化可能である。
多次元及び3Dイメージング、又は時間ベースの3D及び/又は6Dイメージング、及び追跡のためのイメージング中に導入される未知数のボクセルが、低減及び/又は最小化されることによって、X線信号を測定する方法は、より少ない放射線を導入することになる。放射線量の低減は、関心領域内の定義された寸法の特定のボクセルにのみ放射線量を適用し、及び/又は関心領域への放射線の総線量を低減し、及び/又は関心領域に近接又は隣接するボクセル又は領域への放射線量を低減することによって達成され得る。
放射線量は、単一又は複数のエネルギーX線イメージング又は他のモダリティによって、又は超高速パルスを使用するような時間ベースの、又は操向(steering)、拡大、縮小メカニズムを使用する、又は干渉計ベースの技術による他の電磁測定法によって、イメージングする関心領域又は関心成分を定義し、又は再構成される多重次元をさらに調べることによって低減され得る。関心領域を1つ以上定義し、及び/又は、対象において空間領域と同様に周波数領域と同様に時間領域においても関心のない領域を除去する処理、したがって、X線又は他のモダリティによって捜査されるべき関心領域を決定することは、反復及び/又は繰り返されてもよい。各測定の後、前の測定で取得されたデータ及び/又は過去の測定の一部又は全部、化学に基づく、及び/又は個人的なゲノムに基づく、及び/又は免疫プロファイルに基づく、及び/又は環境に基づく、及び/又は統計に基づくなどの全ての関連データが考慮されて、次にどこをイメージング又は測定すべきかの決定のために解析されてもよい。
関心領域の選択は、ユーザーによって行われ得るか、又は予めプログラムされたデジタルプロセス又はAIによって学習されたアルゴリズム又はAI駆動又はディープニューラルネットワークによって学習又は訓練されたプロセスのいずれかからソフトウェアを有するマイクロプロセッサによって行われ得る。自然界におけるX線の測定は、点測定、線測定、又は2D測定若しくは2Dを超える多次元測定であり得る。
データベースは、関心領域内又は対象内の各ボクセル内の1つ以上のサブボクセル単位または各関連ボクセルについて構築することができ、ボクセル内の物質又は合成物質の密度及び/又は特性にほぼ対応する測定値及び/又は補間値に基づいて、1つ又は複数のエネルギーレベルでの測定値のそれに対応する。
関心領域の関連する様々な密度のボクセル又はサブボクセル次元の物質又は複合物質の様々なエネルギーレベルにおける補間プロットは、様々な関連エネルギーレベルにおいて関心領域内の2以上の密度値を有する物質又は複合物質の多数の測定を行うことによって生成される。
X線測定の結果は、VOIの選択された領域を訓練または特定または診断または予知するパラメータの1つとしてAIまたは深層機械ラーニングで使用されてもよい。VOIは、腫瘍または組織または臓器または手術用具であってもよい。
材料分解は、イメージングプロセスの要件に基づいて、又は診断若しくは予知若しくは結果の予測若しくは治療若しくは療法の計画若しくはモニタリングの要件に基づいて、反復されてもよい。
材料の分解は、各パラメータの範囲内の測定値を含むデータベースに基づいて行うことができる。例えば、軟組織については、あるエネルギーで測定したときに適用され得る値の範囲が存在する。
関心領域が決定されると、X線源又は放出位置の移動に伴い、又は静止したまま、コリメータ又は陽極ターゲット又はX線ビームが操作されて、ROIを含む視野のみを照明することができる。X線源又は放出位置が機械的又はモータ駆動のポジショナによって、又は場合によっては電磁操向機構を含み得る偏向器によって移動される場合、X線放出位置は、X線放出領域の中心軸及び/又はROIの中心軸又は中心領域の真上にあることができる。
点、1次元又は2次元の検出器からの測定値から3次元イメージを再構成するために、以下の要因を考慮することができる。
エネルギー分解イメージングシステムは、2つ以上の光子エネルギーレベルで対象物を探査する。通常のイメージングシステムでは、検出器要素に投影される信号は、エネルギーレベルがΩ∈{E1. . . En} となる。qを入射光子数、φを規格化入射エネルギースペクトル、Γを検出器応答関数とし、物体を構成する材料の線減衰係数と積分厚さをμおよびt(ランバートビアの法則による減衰)とする。スペクトル情報の取得方法として、q×φで変化させる方法、またはΩに応じたΓを持つ方法2通りが考えられるが、ここではそれぞれ入射ベース型、検出ベース型と呼ぶことにする。
X線放出位置から来る列またはX線照射経路に対応する検出器の各ピクセルまたは検出領域を考慮して、減衰に基づく線形方程式が構成される場合、例えば、以下のようになる。
X1 + X2 + X3…. Xp = DΩ or n Ω
X1 + X2 + X3…. Xp = DΩ or n Ω
各X1、、、Xnは、VOI内の各対応するXc層でX線を減衰させるVOIの体積である。各層の各X線減衰体積は、X線放出位置に最も近い上流の層と比較して拡大ファクタを有していてもよく、したがって体積の大きさを表すサブユニットの数も同様に拡大ファクタを有していてもよい。そして、各層には、検出器の領域に投影され、投影経路内の各ボクセルの未知値を解くための線形方程式の1つの構築に用いられる測定信号を生成するX線ビームの減衰に寄与するVOIの同じ層内にある特定の空間位置を有する1以上のボクセルのサブボクセルが存在してもよい。
各X1は、もし多数のサブユニットによって表される場合、通過する入射光子を多数有することができる。そして、各層を通過する光子の流入または密度は、コーンビームの性質上、X線ビームが下流に進んで検出器に到達するにつれて少なくなっていくことが予想される。したがって、X線ビーム経路におけるROIの各層における各ボクセルの減衰への寄与の表現は、拡大ファクタを考慮した重みファクタを有し、したがって、上流のROI層のものと比較してROI層の下流の光子密度または流入が減少することが、場合によっては予想される。
したがって、以下のように表すことができる。
X1 + (1/M)X2 + (1/M2) X3… Xp = D Ω
X1 + (1/M)X2 + (1/M2) X3… Xp = D Ω
ここで、1/Mは、ボクセルの同じ体積を通過する減少した入射光子を指すことがある。1/Mが各ボクセルの層で同じである場合。さらに、各減衰ユニットの体積X2は、それぞれの検出領域またはピクセルに対応するX線ビーム経路内のサブユニットの比例数として表すことができる、ボクセルまたはボクセルの一部の全ユニットであってもよい。例えば、X1の体積サイズは(0.64)ボクセル(x1、y1、z1)であり、Xpの体積サイズは(1×ボクセル(xp、yp、zp))であってもよい。
<再構成の他の考慮例>
3Dイメージングでは、関心領域の上面エリアは、対象の関心領域を通過するX線を測定する検出器のエリアと異なる場合がある。
3Dイメージングでは、関心領域の上面エリアは、対象の関心領域を通過するX線を測定する検出器のエリアと異なる場合がある。
例えば、一辺の上面寸法が16cmであるのに対し、検出器の最小有効エリアは20cmであり、この最小有効エリアは関心領域の上面エリア全体を照らすX線を捕捉可能である。
関心領域の深さに関して1000ボクセルポイントがある場合(例えば深さが20cmの場合)、上面のピクセルピッチより小さい領域またはボクセル、例えば検出器のピクセルピッチの64よりも減衰して通過するX線は、検出器に到達すると完全にピクセルを埋めるであろう。V1が0.64の場合、関心領域の上面が16cmで検出器に到達するのが20cmであるとき、V1000は1となる。
X線源が、最初の位置から正確に1ピクセルピッチ離れた新しい位置に移動するとき、拡大ファクタで調整されたサイズを有する関心領域を通過するX線は、検出器上の対応するピクセルに正面合わせ完全に到達してもよい。
データ点が1000個ある場合、検出器に垂直な軸における各隣接ボクセルに拡大ファクタを掛けて、ボクセルを通過するX線が投影X線ビームを受けるためにわずかに大きくなり、したがって、関心領域に関するビームに符号化された情報がわずかに拡大されるようにしてもよい。
X線放出位置が移動するxy二次元平面は、検出器と平行であってもなくてもよい。
高解像度3Dを構築する前に低解像度3Dイメージが撮影される場合、低解像度3Dを形成するためにX線が放出された2D平面上の空間位置は、高解像度3Dの形成に用いられる空間位置の1つとなることができる。特定のX線放出位置でのイメージングは、前に撮影されたイメージが高解像度の完全な3Dを構築するために必要な多数のうちの1つとして使用され得るので、繰り返される必要がない場合がある。
様々な実施形態は、3Dイメージ再構成及び関心領域における未知のボクセル値の導出を達成するであろう。以下は、関与し得るステップの様々な組み合わせの非限定的な例である。
ステップ1.
X線源の下の中心軸線、または、X線コーンビームの中心軸および関心領域あるいは対象を通過したX線に起因して生成された中心軸信号を受ける検出器上のピクセル又はピクセル領域、を決定。
X線源の下の中心軸線、または、X線コーンビームの中心軸および関心領域あるいは対象を通過したX線に起因して生成された中心軸信号を受ける検出器上のピクセル又はピクセル領域、を決定。
X線源及び検出器に対する関心領域の相対位置と、検出器及び/又は中心軸及び/又はX線源に関する関心領域内のボクセルの空間的な相対位置とを記録。
ステップ2.
ビーム粒子ストッパーまたはビーム粒子ストッパーの下の影によって、ビーム粒子ストッパーの向きを決定。
ビーム粒子ストッパーまたはビーム粒子ストッパーの下の影によって、ビーム粒子ストッパーの向きを決定。
例えば、イメージングされる対象をビーム粒子ストッパープレート100とX線源との間に配置する前に、ビーム粒子ストッパープレートだけを配置してX線が受け取られる。いくつかの場合、プレートがx y平面内で移動し、各ビーム粒子ストッパーが以前プレートの上の位置、当該位置は2つのビーム粒子ストッパーの中点である、に配置されるときなど、かかるビーム粒子ストッパープレートが複数の空間位置に配置された状態で、X線が捕捉される。場合によっては、X線測定が行われる際にX線源が移動されるので、特にビーム粒子ストッパーのサイズが既知の場合、プレート上の各ビーム粒子ストッパーの位置は、X線源または検出器または検出器上のピクセルに対する3D空間位置で導出され得る。また、ビーム粒子ストッパープレートの空間位置を、ビーム粒子ストッパープレートが対象と検出器の間に配置されるポジショナの位置によって知ることができる場合もある。ビーム粒子プレート寸法とビーム粒子ストッパーの正確な組成及び分布が知られているので、ビーム粒子ストッパーの各位置を導き出すことができる。ビーム粒子ストッパーの影の位置で著しく減少したX線の測定に基づいて、ビーム粒子ストッパープレートとX線源との間に対象が配置されたとき、影の位置を決定することができる。そして、対象が定位置にないときに、そのような位置または一組の位置を、一次X線がないためにX線測定が最小となるピクセルの位置と比較して、X線源の位置を特定することも可能である。したがって、X線源中心軸の位置と対応する画素の位置が得られてもよい。
そして、低解像度の散乱イメージを導出するためにも、散乱のみのピクセルの位置を導出する。
X線源の中心軸を決定するために、例えば、ビーム粒子ストッパープレート100を対象とせずに、1回のX線測定を行うことができる。各ビーム粒子ストッパーの位置および/またはサイズまたは寸法または厚さを決定してもよい。そして、X線源が粒子ビーム粒子ストッパーの上方に中心を有する場合、ビーム粒子ストッパーの経路に直接沿ったピクセルの位置またはピクセル領域が決定されてもよい。X線源またはX線放出位置が移動すると、各ビーム粒子ストッパーの影はその位置を変えることができる。影の位置から導出または合成された同心円で形成されるラジアルマップの中心を半径中心軸として決定してもよい。
X線放出位置の正確な空間的位置及び/又は向きは、後方検出器で一次X線を受け取るためにX線の焦点と整列するビームセレクタの向き、又はX線源に対するジオメトリ及び/又は向きを検知してROI又はVOIの厚さ、VOIの相対的な空間位置及びジオメトリ、VOIを通過するX線源の中心軸線の位置、及びX線源と検出器の距離、VOI及びVOI内の各ボクセルと検出器の各ピクセルとの相対的な空間位置、を決定する外部デバイスによって決定されてもよい。
装置は、VOIのイメージングに必要な厚さ又は露出、又はVOIのジオメトリを決定することができ、距離を検知するための飛行時間センサーなどの光学センサーであってよい。装置は、光源から光源に最も近い関心領域の表面までの距離、光源から検出器までの距離、関心領域の3D形状、検出器及び/又はX線源との相対位置又は距離、従ってX線放出位置を決定することができる。
装置は、照明開口のサイズが調整可能なX線管又はコリメータ、X線管を移動させる移動体、又は検出器、に取り付けられてもよく、また、装置は、検出器22又はX線源12から離隔した空間位置に設置されてもよい。
VOIのイメージングに必要な厚さ又は露出、又はVOIのジオメトリを決定する際に測定するための装置は、LiDAR又はLiDARのような装置であってよく、相対距離及び空間位置及び関心体積又はイメージングされた対象の空間位置及びジオメトリを検知するために使用することができる。VOI、又はVOIのジオメトリをイメージングするために必要な厚さ又は露出を決定する際に測定するための装置は、超音波装置であってもよい。
<VOIの3D再構成で使用される方法は、以下を含むことができる>
検出器に平行なx、y座標で各ボクセルにラベルを付けるか、各ボクセルを記述する。
検出器に平行なx、y座標で各ボクセルにラベルを付けるか、各ボクセルを記述する。
検出器に最も近い、検出器のすぐ上の各ボクセルにx、y、z、zは例えば層1であることをラベル付けする。そして、X線放出位置に最も近いVOIの最上層Layer pに到達するまで、関心領域で検出器からさらに離れた各層を順次ラベル付けする。各層は、アプリケーションによってまたは3D再構成の現在の反復によって望まれる解像度に等しいかほぼ等しい、z軸に沿った解像度Xcを有する。
検出器に最も近い各ボクセルは、100又は1000又は10000のサブユニットなど、更に多くのサブユニットに分割されてもよい。そのようなサブユニット及び関心領域における又はX線源若しくは検出器に対するその相対的位置は、関心領域の外の領域と比較して関心領域の一部であるという事実と同様に、その空間座標によって決定され、番号付けされ又は注記されてもよい。新しいボクセル未知数が導入された場合、又はサブユニット未知数が導入された場合、未知数は、現在関心領域の一部であるとカウントされ、及び/又は、変化したX線放出位置の前で関心領域内にないものとして分類されることができる。
関心領域の最下層から検出器までの最短距離DBを決定する。これは、予め決められた数であってもよいし、ユーザー又はAIによって設定された基準に基づいてユーザー選択又はコンピュータ選択によって与えられてもよいし、装置を用いた測定によって決定されてもよい。
興味のある領域の最上層から検出器までの距離を決定する。最上層が検出器と平行でない場合。最上層を覆う平面と検出器との距離D Tを決定する。
ユーザーによって、または D T - DB の減算によって、関心領域の厚さ TR を決定する。
厚みをボクセル単位に分割し、各ボクセルをx、y、zで記述し、各単位のzの寸法をz方向の所望の解像度とする。
関心領域の最外縁のボクセルVTOの位置を、関心領域の上面におけるx、y、zの空間において決定する。そして、関心領域の最外層からのX線経路をx及びy座標で決定し、検出器上のその対応するピクセルおよび/または関心領域の最下層の対応するボクセルVBOを決定する。ボクセルおよびボクセルのサブユニットが互いに相対的に空間的に決定され得るように、各サブユニットを表記し、及び/又は各ボクセルを表記する。最下層のボクセルサブユニットは、関心領域の最上層の各ボクセルよりも大きな数のサブユニットを有していてもよい。また、2次元又は3次元の各サブユニットの寸法は、互いに同等であってもよい。
関心領域内に最上層と最下層の両方よりも多くが存在する例、及び/又は、関心領域内に2つ以上の層又はボクセル層が存在する例において、各層の各ボクセルが、異なる層の対応するボクセルと比較して、同じサイズでない場合がある。各ボクセルが検出器上の対応するピクセルの信号レベルに寄与する。一実施例では、各ボクセル内のサブユニットの数は、VBOとVTOとの間の各層における検出器上の各ピクセルに対応して決定される。
一例では、ボクセルのサイズ及び/又はサブユニット、及び/又はボクセル内のサブユニットの数は、同じである。しかしながら、検出器上の各測定において、各ボクセル又はサブボクセルの一部は、図示の図33に示すように、検出器の対応するピクセル上の測定値に寄与することができる。
関心領域からの信号を捕捉する検出器の各ピクセル上の各X線測定について、各ボクセル又はそのサブボクセル、及び対応するピクセル上で収集した測定値に寄与する関心領域のその対応するサブユニットの減衰値に基づいて、線形方程式を作成することができる。
X線放出位置及びX線の向き並びに検出器に対する空間位置に基づいて、関心領域内の各層の各サブユニットは、関心領域を照射するX線源に対する正確な相対空間位置及び検出器上の対応するピクセル位置を持っている。各X線経路に沿った関心領域のサブユニットの集合和の減衰により、検出器上の対応するピクセルの測定が行われる。検出器上の対応するピクセルに信号を発生する各X線経路に沿った関心領域、ROI又はVOL内のボクセル、そのサブボクセル体積領域及びその中のサブユニットの空間マップは、X線放出位置が変化すると関心領域に対して及び検出器に対して相対的に、X線放出位置に基づいて導出されてもよい。
X線検出器上の対応するピクセルに到達する各ビーム経路によって照明される関心領域内の一部又は全体のボクセルを記述するボクセルのサブユニットを決定するために、以下のように計算を実行してもよい。
例えば、SIDが1mで、ピクセルサイズが100umである場合、中心軸のすぐ隣に到達する関心領域を通過するX線ビーム経路について、1/3 x 1000 x 0.1 x 0.1 = 10/3 mm 3の体積測定値が存在する。
V=1/3a2hここで、hはSID、aはピクセルの側辺である。また、Vは、X線が検出器に到達する前に進む全容積である。
しかし、各層について、高さに沿って、体積数は異なっている。そして、関心領域について、体積測定は、以下の通りである。
V=1/3(a2+ab+b2)hここで、aはピクセルの側面、bはボクセル層の側面寸法、hは関心領域の深さである。
関心領域内の各層のbは、X線ビームの傾斜角と、最下層もしくは最上層またはX線放出位置までの当該層の距離とから導出可能である。φ=tan-1(2h/a)ここで、hは線源放出位置からX線経路に沿った対応するボクセル層までの最短距離であってよく、aは関心領域内の当該ボクセル層におけるボクセルの側面である。
例えば、検出器上の1ピクセルに対応するX線ビーム経路に対して傾斜の角度は一定であるので、hが関心領域の各層について変化すると、サイズaの寸法またはサイズaによって記述されるボクセルの寸法も同様である。
例えば、hがSIDの0.8である場合、aは検出器にすぐ隣接する最下層のボクセルの寸法の0.8となる。このような寸法は、サブユニットによって表現されてもよく、各々は互いに同一の寸法であってもよいが、最も隣接する層間のボクセルの寸法の差もサブユニットの整数倍で表現できるように、より小さな寸法であってもよい。そして、各サブユニットは、そのx y z座標で参照されてもよく、及び/又は、各X線放出位置、及び/又はサブユニットを含むボクセルと、検出器上の対応するピクセル位置との相対的なボクセル空間位置は、そのx y位置によって表示される。各ボクセルは、そのx y z位置及び対応するピクセル位置及び/又はX線放射位置に対する相対位置又はX線コーンビームの中心軸位置に対する相対位置によって参照され得る。
SID値またはピクセルサイズ値の両方が異なってもよく、SIDは1.2または0.8または異なる数値であってもよい。そして、ピクセルサイズは異なっていてもよい。あるいは、場合によっては、所望の解像度が1ピクセルピッチよりもはるかに大きい場合、2つ以上のピクセルの測定値を使用するか、ビン化(binned)または統合することで、より少ないデータ分析セット、つまり再構成に必要な計算パワーと計算時間が少なくなる可能性がある。
さらに、3D測定とボクセル値の導出により、特定の成分の厚さを導出することができる。例えば、ある成分は、ほぼ一定の密度又は密度の範囲を有する物質として定義されてもよい。サブユニット値またはボクセル値の決定と、体積および空間位置の組み合わせと、それぞれの相対的な値とを用いて、成分の厚さの値を決定してもよい。
さらに、ある成分があるX線のエネルギーに対して感度が低い場合、特定の異なるX線エネルギーレベルに対してより感度が高いか、より減衰する場合があり、したがって、ある成分の密度または厚さ情報は、様々なエネルギーレベルでの測定に基づいて、さらに区別される場合がある。また、1つの成分について複数のX線エネルギーで測定を組み合わせることで、成分をさらに区別したり、成分を特定したりすることができる。ある物質のスペクトル測定は、その物質の特徴を示し、他の類似の物質とさらに区別することができる。例えば、肺組織と心臓組織または他の種類の赤身組織または脂肪組織とを区別することができる。
上記の3D再構成方法の記載例は、前述のPCT出願に開示され参照されるハードウェア及び/又はソフトウェアと組み合わせることができる。
中心軸ボクセル経路計算について、次に説明する。
関心領域最上層の体積の計算=100um x 100um x 1000000um = 0.333 x 10 10 um3を伴うVOIのため、各層のボクセルの高さをHとし、例えば100umとすると、aは関心領域の1つのボクセル層の下層の辺の寸法、bはそのボクセル層の上層の辺の寸法である。
V=1/3(a2+ab+b2) d
角度は φ=tan-1(2d SIa/a)
V=1/3(a2+ab+b2) d
角度は φ=tan-1(2d SIa/a)
中心軸X線コーンビームについて、X線源に最も近い上面の断面の側辺をaとすると、関心領域はa×a、関心領域の深さはdであり、関心領域を照射するX線を捉える検出器の画素領域は正方形で寸法がbである。
取得する関心領域の解像度を深さに沿ってRrとすると、未知ボクセル点の数はおよそd/Rrとすることができる。
拡大ファクタMfは、X線コーンビーム拡大ファクタであり、これにより、領域の領域に対してa x a を b 2 = a2xMfnとして記述された体積から寸法bxbの領域が得られる。
ここで、nはおよそd/Rrである。Mfが1.00004の場合、X線サブユニットの数は、検出器上の各画素のすぐ上のボトムボクセルを10万個とすると、330行・列のサブユニットが存在することになり、これらはそれぞれ等しい大きさの立方体で、互いに等しい大きさであり、中心ピクセルも含め、各ピクセルの直上のボクセルに含まれる。例えば、検出器上にb×bの寸法があり、b×bはN個のボクセルを含み、各ボクセルは検出器のピクセルピッチとほぼ等しいか、それ以上であってもよいし、深さに関して望ましい解像度に近い大きさであってもよいし、そうすると、下部のボクセル層を記述するサブユニットの数は、zに沿った解像度をRrとすると、10万×b×bである。各ボクセルの中には、g層のサブユニットが存在する。各ボクセルには、最上層側と最下層側が存在する。bs x bsを最下層側にあるサブユニットの数、ts x tsを1ボクセル内の最上層のサブユニットの数とすると、以下のようになる。
Ts x ts x mf g = bs x bs.
Ts x ts x mf g = bs x bs.
g層の各層は、最下層に到達するか、またはg層に到達するまで、最下層のサブユニットに近い次の層までmfのファクターで拡大されたボクセル内のサブユニットを有する。
サブユニット及びボクセルは、以下に説明するような方法によって決定することができる。X線源の中心軸は、ちょうど4つのピクセルの真ん中に位置する。
X線放出位置の中心点に対応する検出器上の中心点の周囲には、4つの同一のボクセルが存在する。
第1X線位置について、検出器上の領域、Rはピクセルピッチの整数倍であってもよく、zは1Rrであってもよい。
X1R Y1R, X1RY-1R, X-1RY1R, X-1R, Y-1R
X1R Y1R, X1RY-1R, X-1RY1R, X-1R, Y-1R
x1R y1Rに対して、サブユニットx330s、y330sがあり、各サブユニットは、中心軸点から離れたサブユニット次元の単位で、相対空間位置として表記される。
X1RY-1R, subunits x330s. Y-330s
X1RY-1R, subunits x330s. Y-330s
X1R×Y1Rの体積内に、g番目の層、mf=√(g&(bs*bs)/(ts*ts))(gは検出器のRr/ピクセルピッチ)が存在する。したがって、同一ボクセル内の最下層のサブユニット層から2番目のサブユニット層は、g番目の層まで、各辺が330×√(mf )の寸法で、合計330×330×mf個のサブユニットを持つことになる。中心軸点から離れた第2ボクセルのサブユニットは、第1ボクセルに隣接して、中心軸からの空間位置をサブユニット数でカウントしてもよい。中心軸から離れたサブユニットの数を計算するには、選択されたサブユニット層のそれぞれのボクセル位置の数に、特定のボクセル位置ごとにサブユニット層に固有のサブユニットの数を乗算する。
X線源が移動したり、X線放出位置が移動したりすると、中心軸の位置が再び決定される。また、X線照射経路が変化することにより、X線経路が進む関心領域が再定義される。最上層の表面を変え、関心領域を通過するX線ビームを測定する最下層のピクセル数を変化させることもできる。X線ビームが通過して特定の画素または2つ以上の画素の領域に信号を発生する関心領域内の各ボクセル層からのボクセルは、以前と異なっていてもよく、同じ層の各ボクセルはまた、どのサブユニットがその体積内にあるかという点で、異なっていてもよい。あるいは、各サブユニットとその中心軸に対する相対位置、及び同様に線源に対する相対的な空間位置は、同じままであってもよい。同様の方法を用いて、各ボクセルとその中心軸に対する相対位置に名前を付け、どのサブユニットといくつのサブユニットが各ボクセルにあるかを決定してもよい。
X線放出位置が深さの距離とほぼ一致する領域内を進み、及び/又は隣接するX線放出位置が空間的にほぼXr離れているというように、変化したX線放出位置で約d/Er個のイメージが撮影される場合、関心領域を通過するX線を測定する各ピクセルの各測定値と、各X線ビーム経路におけるボクセルおよびボクセル内のサブユニットとに対応する多数の線形方程式が生成される。検出器上の2つ以上のピクセルを含む各ピクセル又は各ピクセル領域における測定値の総数は、ボクセル及びその中のサブユニットを含む線形方程式の総数を生じさせることができる。そのような方法のいくつかの例は、前述のPCT出願に詳述されている。
ピクセル領域が含まれる場合、各ピクセルに平均化された全測定値が使用される。
さらに、特に線形方程式がほとんどの計算でサブユニットのサブセットのそれぞれを含む場合、サブユニットのサブセットは合成された疑似ボクセルの単位を形成するために組み合わされるかもしれない。さらに各測定値におけるボクセルの一部分は、サブユニットのサブセットによって表されてもよい。その減衰値も未知単位となり得る。しかしながら、例えば、高い確率で、ボクセルがその周囲のボクセルと同じ測定値を有するか、またはその組成においてゆっくりと変化するか、または均一であり、その周囲のボクセルまたは同じボクセルの他の部分と異なるであろう理由を示す他の指示がその隣接領域にない場合、そのようなサブセットの一部分がカウントされるケースがあり得る。ボクセルのサブセットが、ボクセル及び/又はその周囲の1つ以上のボクセルと同じ密度値を運び、体積が比例するかどうかを確認するために、反復方法が使用されてもよい。さらに、導出は、関心領域及び他の成分に対するボクセルの位置及び同じ成分内のボクセルの位置から来てもよい。
関心領域内の特定の領域又は体積の特定の部分を照明するためのX線放出位置間のより小さな移動ステップは、未知のボクセル又はボクセルのサブユニットがある場合、又はボクセルのサブセットが解決されていない場合にありうる。
測定及び同じ処理は、より小さいボクセルサイズで、より高い解像度の検出器で実施されてもよいし、明確に解決されない領域の値をさらに解決するために深さにおけるより良い解像度が必要とされる場合もあり、又は、既存の測定及び他の情報及びデータソースから引き出された事実又は結論及び与えられた指示によりそのような導出又は補間及び近似が行われないかもしれないということが明確に指示されている場合にも行われ得る。
定性的・定量的な3D、CT計算、X線測定には、大量のメモリと計算機能が必要な場合がある。nマトリックスまたはn2マトリックスの方法と装置では、ここで説明する。既存の検出器に取り付けられるか、無線通信またはテザー機構を介して取り付けられる検出器モジュールまたはアセンブリまたはサブモジュールは、メモリストレージ、および/またはデータベース性能および/またはデータベースおよび/またはマイクロプロセッサおよび/または検出器側で局所的に保存および計算するための、処理および/または保存を含むことができる。表示は、ローカルに、またはマイクロプロセッサから直接、または無線通信またはイーサネットまたは他のテザー通信手段を介してリモートで行われてもよく、表示と、場合によってはさらなる計算と保存のために、第2のマイクロプロセッサに接続される。
32ビット以上のADC解像度を有するソフトウェア及び/又は電子機器及び/又はイメージセンサは、既存のCT、又は多次元X線イメージング、2Dイメージの取得、処理、及びスペクトルイメージング、ダイナミックイメージ処理、トラッキング、高ダイナミックレンジによる多次元アプリケーションの一部による高速かつ正確な断層撮影再構成を含むイメージ処理、特に断層撮影用のVOI選択と組み合わせるために使用されてもよい。例えば小さな血液毛細血管の寸法範囲で、z軸に沿って一桁ミクロンまたはサブミクロンの範囲のような高解像度イメージは、人間のような大きな物体の断層撮影のために妥当な放射線レベルおよび速度で達成可能であるかもしれない。従来、このような解像度は、microCTを用いた小さなサンプルでは可能であったが、医療用CTでは不可能であった。
<造影剤>
定量的イメージングと検出感度の向上により、X線または他のモダリティ用の既存の造影剤を引き続き使用することができるが、対象への毒性および副作用を低減するために以前より低いレベルで使用することが可能である。例えば、ガドリニウム、ヨウ素化、ビスマス、バリウム、カルシウム、ナノ粒子、およびキレート錯体などのそれらの誘導体は、マイクロ、ナノ、ピコ、フェムト、またはより低いモルレベルまで、より少量で使用されるかもしれない。および密度測定などの用途におけるその検出は、診断の精度、物質の特性評価、ROIにおける事象を監視し、他の産業で用いられる深層機械学習、ニューラルネットワークおよび他の方法を用いて開発されるAIアルゴリズムに基づく手順を導くために、ユーザーまたはデジタルプログラムまたはコンピュータに対して、その提示において増幅または修正され、および/または異なる色または信号レベルで提示されてもよいが密度、厚さ、原子zの識別、およびその他の一般的に使用されるAI基準における定量的測定と組み合わせることで、造影剤は医療、産業およびセキュリティアプリケーションにおける手順を支援することができる。密度、厚さ、原子zの特定、およびその他の一般的に使用されるAI基準における定量的測定と組み合わせることで、造影剤は医療、産業、セキュリティアプリケーションにおける手順を支援することができる。
定量的イメージングと検出感度の向上により、X線または他のモダリティ用の既存の造影剤を引き続き使用することができるが、対象への毒性および副作用を低減するために以前より低いレベルで使用することが可能である。例えば、ガドリニウム、ヨウ素化、ビスマス、バリウム、カルシウム、ナノ粒子、およびキレート錯体などのそれらの誘導体は、マイクロ、ナノ、ピコ、フェムト、またはより低いモルレベルまで、より少量で使用されるかもしれない。および密度測定などの用途におけるその検出は、診断の精度、物質の特性評価、ROIにおける事象を監視し、他の産業で用いられる深層機械学習、ニューラルネットワークおよび他の方法を用いて開発されるAIアルゴリズムに基づく手順を導くために、ユーザーまたはデジタルプログラムまたはコンピュータに対して、その提示において増幅または修正され、および/または異なる色または信号レベルで提示されてもよいが密度、厚さ、原子zの識別、およびその他の一般的に使用されるAI基準における定量的測定と組み合わせることで、造影剤は医療、産業およびセキュリティアプリケーションにおける手順を支援することができる。密度、厚さ、原子zの特定、およびその他の一般的に使用されるAI基準における定量的測定と組み合わせることで、造影剤は医療、産業、セキュリティアプリケーションにおける手順を支援することができる。
M3-パーソナライズドCTまたはnマトリックス法に基づく3Dイメージングは、必要な放射線、造影剤の毒性を最小限に抑え、介入デバイスおよび治療レベルのより良い制御と、ROIおよび関連する各手順で関心のある各材料または物質の定量的評価が提供されるカスタマイズイメージング法である。
nMatric法は、分散した測定領域、または分散した測定時間間隔、断層撮影の代わりに2Dスペクトル、低露光レベルで構造体照射またはビン化検出器測定を用いることによる低解像度2D、低解像度3D、および手順ごとに決定した大きなXcステップなどの特徴を含むことができ、SPRが1%未満または5%未満に減少した高い空間およびスペクトル解像度検出器の使用により高い感度で小型検出器および高速取得検出器を使用して高度に制限した焦点ROIを提供する。そして、このようなシステムは、高速ミリ秒切り替え式またはマイクロ秒切り替え式のフィールドエミッタX線管と、従来の管と組み合わせて、異なる時間に同じ放出位置でX線を放出したり、同じ時間または異なる時間に異なる位置でX線を放出するために使用されてよい。
SPRの1%未満、又は5%未満に散乱除去できるスペクトルイメージング装置及び方法、及び/又は多次元イメージャ又は3Dイメージャ又は6D又は7Dイメージャ及び/又はスペクトルCT又は3Dシステムは、分子イメージング造影剤及びマーカーを含んでいるがこれに限らないマーカー及び/又は造影剤を使用できる。これに限らないマーカー及び/又は造影剤は、CTまたはmicroCTまたはPET、または他のモダリティとともに従来のアプリケーションに使用され、1600cm2以上、または400cm2以上、または40cm2以上、または20cm2以上、または10cm2以上、または5cm2以上、または1cm2以上、または0. 5cm2 以上、または 0.1cm2 以上、または0.01cm2 以上の寸法のX線検出器または2D検出器またはフォトダイオードとともに使用可能である。
造影剤は、分子複合体においてコンジュゲートされてもよい。例えば、これは、ターゲットのタンパク質、又は低分子を含むか、又はタンパク質及び/又は脂質及び/又は他の化学物質からなる、1つ以上の分子を含むことができ、時には、リポソーム、アルブミン、ポリクローナル抗体、モノクローナル抗体などの大きな複合体又は複合体中に存在することができる。合成抗体や、scfv、fab、ミニボディ、ナノボディ、vhドメイン、DARTs、AFP、アルブミンなどの抗体誘導体や変異体、チオブリッジ、cyPEG、マレイミド、NHS-エステルなどのコンジュゲートユニットやコンジュゲーション化学、クリック化学、オキシム、酵素媒介コンジュゲーションなど。ターゲットタンパク質と造影剤または複合体中の他の要素を接続するための、および/または造影剤を保持するために安定化または複数の繰り返し単位を形成することができるポリマー、および/またはジスルフィド、酵素またはpH切断可能、炭酸塩または非切断可能などの放出リンク、および/または例えば、ヒトまたは動物の体内または生体外で他の物体または組織または他の成分または組織または物質の組み合わせとは異なって測定および定量化することのできる様々な有機または合成薬剤のペイロードが挙げられる。
このような分子分析システムは、ラベルがX線造影剤であるフローサイトメーターで使用することができる。レーザーベースの検出の代わりに、X線造影剤に感度のあるX線測定システムが使用されるか、またはX線測定システムが、蛍光信号とX線信号の両方を記録できる蛍光色素ベースの従来のフローサイトメーターとハイブリッド化または結合されてもよい。
PETまたはMRI、またはPET/CT,単一写真放出断層撮影で使用される造影剤、例えば生物学的にカルシウムのように挙動するものは、X線イメージング造影剤として使用することができる。一例として、ストロンチウムの放射性同位体が挙げられるが、ストロンチウムはX線によって容易に検出可能であり、毒性が低く、安全性がよく理解されているため、必要ない場合がある。その代わりに、非放射性元素の同位体をX線造影剤として使用してもよい。
PET用に設計された造影剤は、特定の病気に関連するタンパク質などの重要なタンパク質上の高い特異性を有するターゲットのエピトープを認識する分子と結合していてもよい。元素の放射性同位体は、同じ元素または物質の非放射性同位体に置き換えられ、抗体およびその誘導体のようなタンパク質エピトープ結合タンパク質にコンジュゲートされても、されなくても良い。
例えば、これらの薬剤は、Ca、Cr、Co、Ga、Se、Kr、Tc、In、I、Xe、Sm、TIの非放射性同位体または安定同位体、あるいは別の例ではフルオロデオキシ-グルコースであってもよい。
タンパク質、タンパク質のサブユニットまたは抗体またはナノボディまたは核酸ベースのオリゴまたはタンパク質複合体またはリポソームのような複合ベシクルを生成する遺伝子工学的遺伝子は、Ca++または他のカチオンを捕捉する、および/または正常な状態の細胞とは区別できるナノ粒子、バリウム、ストロンチウム、ルビジウムなどのPET、MRI、CTに従来使用されてきた造影剤をここで使用することができる。
関心領域またはROIの一部における流体または血管の透過性および流動特性は、例えば、診断、検査、監視および追跡に使用することができる。
腫瘍を有する組織、関節炎領域、骨折領域、超音波、又はRF又はレーザーによるようなエネルギー処理領域などの疾患領域は、正常又は未処理の組織とは生理的及び生物学的に異なる。説明したX線イメージングシステム及び方法は、このような疾患の検出、診断、監視及び調査に使用することができる。
心臓組織又は腎臓組織のRF切除などの介入処置の前に、組織の一部、ROIの一部は、ROIで処置及び手順が実行されたときに変更されて異なる可能性のある特定の透過性特性を有していてもよい。造影剤又は標識物質は、周辺組織と異なる可能性のある透過性特性を有するROIの一部又は完全な領域において、注入、吸引又は吸収されてもよい。造影剤と組み合わせたこの装置は、介入処置のイメージガイダンスに使用され、介入処置中の治療処置を監視することができる。診断、または毒性を最小限に抑えた切除領域の監視は、介入プロセスおよび結果をよりよく監視するために、いくつかの介入処置において好まれる場合がある。例えば、心臓焼灼術では、造影剤を含む液体を焼灼部位に吸引し、焼灼部位は、健常部位や未焼灼部位とは異なる透過性のパターンや透過速度などの透過性を持つことになる。これにより、治療の有効性を導き、治療レベルを調整し、処置に必要な時間を短縮し、および/または処置中に周囲の組織への損傷を制限することができる。
ここで説明したX線イメージングシステムは、生体外サンプルイメージングシステムとして使用することができるため、医薬品開発およびライフサイエンス研究のための生体外サンプルおよび生体内の両方の測定に対応する汎用イメージングおよび測定システムを提供することができる。生体外サンプルで使用する場合、サンプルは流体、またはマイクロ流体装置を含むことができ、造影標識は、表面に対して1D-3Dの空間位置で表面に固定されることができる。造影標識は、分子の混合物、分子の複合体、または分子と細胞の混合物において相互作用する、または一緒に存在する可能性のある1つまたは複数の分子とコンジュゲートした1つまたは複数の造影標識が存在する場合がある。造影標識抗体を用いて、生体外サンプルおよび生体内で腫瘍マーカー(CA19-9など)にラベリングし、腫瘍あるいは腫瘍領域の研究および治療ガイダンスに役立てることができる。造影剤には、放射能を含まないPET造影剤、あるいはMRI造影剤、あるいはX線/CT造影剤、あるいはカルシウム、亜鉛、ヨウ素などの内因性天然元素やその誘導体などがある。
腫瘍マーカーは表面上に固定されてもよく、造影標識抗体または小分子は、機能化された表面と培養されてもよく、それは静止していても、動いている粒子上など動いているものでもよい。粒子は、内部または外部の病原菌または両者のハイブリッドからのような抗原であってもよい。混合物の1つ以上のコンポーネントは、光学的またはエネルギーピンセットまたはマニピュレータによって、またはスパイラルマイクロ流体チップ上などの重量によって、回転運動によって粒子を分離して選別または操作されてもよい。1つまたは複数の分子アッセイ(assay)を実施してもよい。
ターゲットおよびコンジュゲートのバインドは、活性領域がオリゴヌクレオチドの一部、DNAまたはRNAまたはRNAのような分子の一部またはハイブリッド分子または抗体またはオリゴヌクレオチド複合体の組み合わせであれば、天然または合成であっても、ベースペア混成を介してでもよい。
これより生体内および人体イメージングの例を説明する。
治療目的で使用され得る内因性化合物および分子または物質またはその改変体は、関連する分子、組織、コンポーネント、物体の定量的特性評価、あるいは、従来の方法に基づくX線測定やCTシステムでは直ちにあるいは容易に識別できないROI内の物質の識別や測定のための造影剤として、本開示に記載のX線システムベースのイメージングと共に使用することができる。一般的な従来のX線システムでは、減衰特徴が重なるため、X線システムが骨イメージから造影剤を識別することは困難である。これらの装置は、ほとんどが解剖学的マーカーによってコンポーネントまたはイメージを分離するので、内因性化合物が投影経路に埋め込まれている場合、一般的な従来のX線システムは、定量的測定したがって造影剤に対して十分な感度を有することができない。定量的測定は、骨の密度または厚さ、および/または1つ以上のエネルギーレベルにおける一貫した減衰特性の測定として定義され、したがって、これらのシステムおよび/または内因性分子および物質に基づく造影剤は、従来のイメージング方法において、物体内の重なる組織内に埋め込まれた造影剤の存在または量を決定または識別するのに適していない可能性がある。
本開示のX線イメージングシステムは、例えば、SPRが1%又は5%未満となるように散乱が除去される場合、及び/又は複数のX線エネルギーでの測定、及び/又は3D及び/又はCT断層像の再構成で、定量的であってよい。
造影剤の存在により、測定値の前後に差が生じる可能性がある場合、造影剤を特定し、また定量化することができる。特に、一般に骨の構造や形状は、その剛性から静止時や運動時には変化しないため、その可能性が高い。しかし、造影剤は、投与方法によっては、所定の特性を有する場合がある。例えば、液状で注入した場合、造影剤は骨とは大きく異なる流動性のある状態で進行または滞留する可能性がある。あるいは、造影剤をインプラントやプローブにした場合、その設計や組成による所定のX線イメージング特性があり、骨と区別がつく可能性が高い。
イメージ化された物体又はROIの、残りの部分に対する提示及び表示において、造影剤を含む材料は、ROI内の骨及び他の組織又は物体のものと区別できる選択された色調又は質感又は視覚特性で表されてもよい。
流れ方向の特徴付けでは、1つ又は2つの造影剤が使用されることがある。例えば、カルシウム系造影剤を最初に注入し、次いでヨウ素系造影剤を注入することができる。両者の流動特性、及び/又は、両者が時間の経過とともに他方と合流するか又は相対的な位置を維持するかどうかによって、流動方向が決定される。また、マイクロバブルを用いた造影剤も、流れ方向の研究に用いられる造影剤の一つとして使用することができる。
別の例では、造影剤は断層撮影のイメージの前後で測定することができる。処置の前後にCTを使用することは、患者、特に小児患者が受ける放射線が多すぎるため、従来は推奨されていない。開示されたイメージングシステムでは、放射線レベルは、従来のCTと比較して極めて低くなっている。さらに、イメージングもまたターゲット化され、健康な組織が不必要な放射線被曝から免れる。本明細書に開示されたイメージングシステムは、CTによるカルシウムとは対照的に、診断手順としてカルシウムのような造影剤と組み合わせることができる。
グルコン酸カルシウムなどのカルシウム共役分子は、低カルシウム血症の治療によく用いられ、時には、NaClと混合して、例えば、以下の投与量で使用され、500 mg; 100 mg/mL; 650 mg; 1000 mg; 1 g/50 mL-NaC1 0.9%; 1 g/100 mL-NaC1 0.9%; 2 g/100 mL-NaC1 0.9%; 1 g/50 mL-D5%; 20mg/mLNaCl 0. 500 mg; 100 mg/mL; 650 mg; 1000 mg; 1 g/50 mL-NaC1 0.9%; 1 g/100 mL-NaC1 0.9%; 2 g/100 mL-NaC1 0.9%; 1 g/50 mL-D5%; 20mg/mLNaCl 0. 67%;2g/50mL-NaC1 0.9%;1g/25mL-NaC1 0.9%;1g/100mL-D5%;2g/100mL-D5%;20g/1000mL-NaC1 0.9%, 治療用として使用することができる。同じ化合物の投与量を調節して血管造影剤として使用してもよい。注入されたグルコン酸カルシウム溶液の投与前後、またはグルコン酸カルシウムを含む血液または体液がROIに到達する前に、骨イメージまたはカルシウムまたはマイクロカルシウムを測定して登録または決定し、残りの体内イメージから削除してもよく、基準オブジェクトとして使用することもできる。投与されたカルシウムは、時にはリアルタイムで測定され、正確に決定されることがある。必要に応じて、カルシウムは、本開示のX線イメージングにおいて、より少ない投与量で、造影剤としてのヨウ素またはヨウ素化、イオプロミドの代わりに使用され得る。
また、悪性高熱危機の際に高カリウム性心毒性を治療する場合には、グルコン酸カルシウムまたは塩化カルシウムを使用することができる。例えば、塩化カルシウム(4-10mg/kg)を使用することができる。安全上の理由から、異なる投与量が必要とされ、または調整され得る。通常、塩化カルシウム10mg/kg(最大量2,000mg)またはグルコン酸カルシウム30mg/kg(最大量3,000mg)は、生命にかかわる高カリウム血症に用いられるので、両カルシウム製剤の安全プロファイルは十分に確立している。
塩化カルシウム、カルシウム塩、グルコン酸カルシウムなどの同じ試薬は、血液を可視化するための造影剤として、血管造影において、または外科用プローブもしくはツールまたは生検プローブに対する血管の相対位置または空間位置を決定するための最小侵襲外科ガイダンスに使用され得る。インプラント、カテーテルチップ、またはガイドワイヤ、エネルギーベースの治療処置または化学処置のターゲット、または疾患領域、または様々な基準によって識別されるROI、またはX線イメージングシステムまたはX線と他のモダリティを含むハイブリッド測定およびイメージングシステムにおける参照オブジェクトに対する血管の相対的位置または空間的位置を決定するために、最小侵襲手術ガイダンスのための造影剤として使用される。
典型的な製剤としては、静脈内用として100 mg/mL (13.6 mEq Calcium/10 mL)を挙げることができる。オスモラリティ 2.04 mOsmol/mLEachmLを含む。塩化カルシウム二水和物 100 mg、注射用水 q.s. pH (範囲 5.5-7.5) は塩酸および/または水酸化ナトリウムで調整されている。10mL あたり 13.6mEq カルシウムおよび13.6mEq塩化物を含む。分子量は147.02で、分子式はCaCl2-2H20である。造影剤としての使用に際しては、要求される条件や感度、X線システムの構成により、製剤を調整してもよいし、同じでもよい。
例えば、これらの試薬は、1分間の注入期間に10mg/mlで注入されることがある。
例えば、10%塩化カルシウム注射液(USP)は、ゆっくりとした静脈内注射(例えば、1mL/分)で投与可能である。
亜鉛注射は、血液や血管の存在を可視化するための造影剤としても使用することができる。典型的な濃縮硫酸亜鉛注射液(USP)は、全非経口栄養(TPN)用溶液への添加物として使用することを意図した無菌、非パイロジェン性溶液である。通常、1mLあたり硫酸亜鉛(無水)12.32mg、硫酸でpH調整された注射用水q.s.を含む。防腐剤を含まない場合もある。1mLあたり5mgの元素状亜鉛を供給する。造影剤としてのX線撮影に必要な量または濃度は、安全性プロファイルの範囲内で実験的に決定され、その目的に応じて調整される可能性がある。
Mg又はMnコンジュゲート溶液は、同様の方法で使用することができる。場合によっては、例えば血液などの体液の流れ方向を特徴付けるために、X線減衰特性が変化する造影剤を順次、又は変化する時間及び/又は異なる投与経路で投与することがある。
カルシウムのような内因性元素ベースの造影剤の測定及び定量化は、以下のような多くの方法で行うことができる。
- 造影剤の投与前、又は造影剤がシステムからおおよそ除去された後、1つ以上のエネルギーレベルでのスペクトルイメージング又はスペクトル多次元イメージング、及びいくつかの例では、様々な組織又はROIのセグメント化イメージ処理又はデジタル分析が行われてもよい。また、骨組織又は他の組織の識別及び定量化、及び/又はカチオン豊富領域の識別及び/又は微小石灰化の識別及び/又はカルシウムのスコアリングが行われてもよい。
- 塩化カルシウムのような造影剤が投与された後、造影剤が体内を循環してその目的地に到達するために指定された時間枠内で、全てのカルシウムが豊富な領域を特徴付けるために、1つ、又は2つ、又は3つ以上のエネルギーレベルで測定が行われ得る。造影剤による追加の測定は、分離して位置決めし、造影剤を使用しないイメージ又は測定と比較することができる。例えば、1つの投影経路に沿った測定値が、同じ投影線上のカルシウム製剤の投与前の測定値と異なる場合、測定値の差は、塩化カルシウムの存在を示すことができ、本開示に記載の任意の方法を使用して定量化することができる。例えば、導出されたカルシウム又は骨の測定値の厚さが、造影剤投与前の値よりも大きい場合、測定値の差は、投影経路内の血管の部分の造影剤に起因すると考えるのが妥当である。なお、血管の部分の太さは、投影経路内に骨がない隣接領域で同じ血管を測定して導き出してもよい。そして、測定結果となった血管内の造影剤の密度を求めてもよい。
- 場合によっては、例えばセグメント化された3D再構成データセットからのカルシウム豊富領域の相対的または空間的位置は、カルシウム豊富領域のどの部分が骨材料またはROIに予め存在するものか、測定値のどの部分が骨組織のないROIのものか、またはどの部分が血管または心臓などの組織内の造影剤によるものかに関する情報を提供しうる。
- 場合によっては、造影剤及びその関連するイメージターゲットを特定し、特徴付け、定量化するために、造影剤の投与の前及び後の測定を行う必要がない。例えば、ROIの様々な空間的位置における、点または1Dまたは2D - 7D多次元イメージの解析は、様々なカルシウム豊富領域の位置を特定および特徴付けるのに十分であり、または例えば造影剤を注入された組織、骨組織、または微石灰化または血管であると測定源を推論するのに十分である。
- 例えば胸骨の一部又は頭蓋骨の一部又は歯の一部などの基準物体としての骨又は軟組織又は血管などの関心組織の空間的位置、密度及びゆっくりと変化する性質に基づく測定値を分析するデジタル分析を用いる方法は、対象となる組織、又はコンポーネント若しくはROIの少なくとも一部分における1以上の個々の物質又はコンポーネント若しくは材料の位置及び配置に使用されてもよい。例えば、本方法は、造影剤豊富領域が、骨とは別の軟組織の一領域内にあるが、一領域で骨と重なっているかどうかを決定してもよい。しかしながら、骨組織又は軟組織の空間容積及び/又は密度はゆっくりと変化するので、重なりがない1つの領域の測定から推測されるデータは、造影剤結合体及びその関連ターゲットと重なる領域における骨密度を推測するために使用されてもよい。さらに、骨の形状および空間的な位置と寸法も、重なり合う領域の周囲の測定値から推測することができる。したがって、骨組織から推測されるデータは、投影線におけるカルシウム及び骨に係る測定値における骨組織からの寄与を差し引くことにより、カルシウム造影剤の密度及び厚さ等の定量的な値を導出するために使用されてもよい。例えば、血管であれば、造影剤の寸法や密度を推論することが望まれる。骨組織と重なる血管の空間容積は、重なり部分に隣接する領域から導出することができる。したがって、血管に含まれる造影剤の密度は、このようにして得られてもよい。
- イメージングにおける造影剤及びそのターゲットの表現は、カルシウム又は亜鉛のような内因性の組織又は分子と類似又はほぼ同じ場合、造影剤を含む又は相互作用する体積を内因性の組織のそれと区別する、色及び/又は背景からのコントラスト若しくはダイナミックレンジ又は強度の増加のような、明確な視覚表現で行うことができる。例えば、カルシウム造影剤と混合された又はカルシウム造影剤を含む静脈又は動脈を表現するために、青色又は赤色が使用され得る。
造影剤の毒性を下げるために、例えば、ヨウ素化した造影剤の投与量を劇的に減らす方法を用いることができる。例えば、血管を可視化するためにヨウ素化試薬が注入される。点、1D、2Dから3D又は7D測定による測定及びその導出結果、特に密度、空間位置及び厚さ、及び/又は他のコンポーネント若しくは組織若しくは基準物体との関係に基づいてターゲットを特定するAIの支援及び異なるモダリティの他の測定により、投与量が劇的に減少した場合、造影剤は低い投与量で使用されてよく、点、1D又は2D若しくは3Dイメージを用いて造影剤の存在、及び場合により造影剤の量を定量化することが可能であろう。造影剤が検出され、測定、定量化され、その純物質または相対的純物質レベルに物質分解されている場合、視覚的に物質分解イメージが抽出され提示されることがある。しかし、承認された投与量と比較して非常に少量の場合、例えば、血管内にごく少量の造影剤が投与された場合、造影剤の量を瞬時に測定し、及び/又は、測定したROI又は対象又は造影剤の自然色と異なる色又は類似の色又は同じ色で視覚的に表現し、背景に対して造影剤を含む対象又はVOIを明確に表現するために投与量を調節しても良い。造影剤及びその標識された対象又は血管や神経組織などの組織の表示のために選択された色の強度及び表示されたダイナミックレンジは、使用される造影剤の密度及び厚さに定量的かつ比例的に関連してもよい。場合によっては、表示される色の明るさと造影剤の密度との間に比例関係は必要ない。
次に、造影剤としてのカルシウム系溶液の追加例について説明する。
小児高度救命処置において、塩化カルシウム10%:は高カリウム血症、低カルシウム血症、カルシウム拮抗薬の過量投与、高マグネシウム血症に適応される。心停止時には、20mg/kg(0.2mL/kg)をIV/IOでゆっくり押し出し投与し、その後必要に応じて投与を繰り返す。
注射に加えて、血管内投与、造影剤の経口または直腸投与はすべて、ここで説明した開示されたX線イメージング装置-時間領域でのスペクトルCT、または2Dまたは1Dまたは点測定およびイメージングに適した造影剤の投与経路の例である。
他の投与経路としては、例えば、髄腔内、関節内、筋肉内、皮膚内、腹腔内、膀胱内、子宮内を挙げることができる。
同様に、X線イメージングと同様に他のモダリティで使用されてきた他の造影剤を本発明のX線システムで使用してもよく、一部は従来技術で使用されてきたものよりも低い濃度で使用してもよい。例えば、MRI、CT、超音波、PETのガドリニウム系造影剤(GBCA)で使用される生体内造影剤も使用することができる。
追跡は、外部コンポーネント、または構造および密度が既知であり、未知のコンポーネント、および関心領域とは異なるが、対象の内部にある、以下の特性の1つ以上を有するコンポーネントを用いる場合に実行することが可能である。
既知の複雑さ-X線測定可能、または光学、音響、MRI、PET、SPECTなどの1つ以上の他のモダリティによって測定可能であること。
<1次元又は2次元の空間構造;1次元又は2次元の空間微細構造>
まず1つまたは複数のX線ビームを様々な場所に別々に照射し、コンポーネントまたは対象物または興味があるターゲットの体積を測定したり、複数の寸法を測定したりするために、または、対象物の内部のどこにそのコンポーネントがあるかを知る前に、あるいは対象物内の他のコンポーネントについて、測定する。
まず1つまたは複数のX線ビームを様々な場所に別々に照射し、コンポーネントまたは対象物または興味があるターゲットの体積を測定したり、複数の寸法を測定したりするために、または、対象物の内部のどこにそのコンポーネントがあるかを知る前に、あるいは対象物内の他のコンポーネントについて、測定する。
このような外部コンポーネントECR又はICRは、関心領域を検出器上に投影する照射路から離れた関心領域又は関心対象の側に配置してもよいし、このようなECR又はICTを照射路内に配置してもよいが、対象およびX線源、又は対象と検出器の間に置いてもよい。
場合によっては、多次元イメージングシステム又は関心領域の3D測定、又はここで説明した以外のモダリティ及びシステムを用いた測定又は所定の空間位置などの他の測定が知られている場合、そのような外部コンポーネントECR又はICRは必要ない。
場合によっては、ECR又はICRは、他の既知の値又は他のシステム及びモダリティ及び方法を用いて行われる測定と組み合わされる。
いくつかの場合において、空間センサー、光学又はサーモカメラ、又はビデオカメラは、対象物の内部又は外部であり得る基準オブジェクトに対して対象物を空間的に位置づけるために使用される。或いは、このようなセンサーは、対象内の別のROIに対するROIの位置を特定するために使用されてもよく、又は、X線測定中又はその前後に、関心領域、又は対象を静的又は動的にイメージ化して、関心領域又は対象の完全又は部分形状を決定して、対象のコンポーネント、又は関心領域、或いは対象又はコンポーネント又は関心領域間、任意に基準物体間の相対的空間又は時間関係を追跡及び/又は特定及び/又は特徴付けるために必要な情報を提供するために、使用され得る。
いくつかの実施態様では、人工知能又は深層機械学習又は機械学習アルゴリズムは、1つ以上の空間的又は時間的の測定値のセットに基づいて、各コンポーネント、ターゲット、又は関心領域又は対象の記録された追跡に基づいて訓練される。追加イベントは、トラッキング活動から学習された結果によってトリガーされてもよい。
例えば、手術中に、インプラントを配置する、又はRF若しくはレーザー若しくは超音波などのエネルギーを用いて切除を行うという1つ以上の外科的手順を、AIを用いて追跡及び分析することができる。外科医又はロボット手術システムは、AI結果からの勧告を使用して誘導されてもよく、又は様々なシナリオの下で訓練結果に基づいて自動的に移動して手術を実行してもよい。
診断あるいは結論の作成など、1つ以上の事実の導出は、対象物または対象物自体の標識された細胞またはコンポーネントまたは関心のある領域のような、コントラスト標識分子又はX線測定可能分子、又は分子複合体又は1つ以上の分子又は要素定義領域又は細胞などの動き又は相互作用分子の追跡の1つ以上の事例に基づいてよい。
診断あるいは結論の作成など、1つ以上の事実の導出は、例えば、造影標識分子やX線測定可能分子などの分子、または分子複合体、あるいは1つ以上の分子や要素が定義した領域や細胞、例えば標識細胞やコンポーネント、対象物自体の関心領域などのパターンや形、形における変換、組成、動き、相互作用に使用される。
<フロートラッキング>
2Dイメージ、またはスライスイメージ1Dまたは点イメージまたは多次元イメージを使用する場合、または関心領域をフロー体積の体積またはスライス、または対象内の選択した体積に制限する場合、例えば、血流の追跡において、監視する関心領域は、血管の中心に沿った線として選択することが可能である。場合によっては、血管の中心に沿った選択された2D平面又は選択された3D体積がイメージされ、又は血管に沿ったスライス線又は分散した位置での流れ方向に垂直な軸から外れた断面でイメージされる。これは、放射を制限することができ、および/または、サンプリングされた位置の大きな領域を含むことができる。このような測定により、対象の異なる領域からの流れを同時に分析し、異なる領域間の動的な関係を特徴付けることができる場合がある。血流、病気、物理的条件及び流体挙動の診断、追跡及び特徴付けは、指標の1つとして、このようなX線測定に含まれ得る。複数のX線エネルギーレベルは、流れの異なるコンポーネントや異なる要素を追跡するために利用されることがある。例えば、白血球と赤血球は異なるX線測定特性を有しており、また、特定のマーカーをターゲットとする造影剤を区別することができる。
2Dイメージ、またはスライスイメージ1Dまたは点イメージまたは多次元イメージを使用する場合、または関心領域をフロー体積の体積またはスライス、または対象内の選択した体積に制限する場合、例えば、血流の追跡において、監視する関心領域は、血管の中心に沿った線として選択することが可能である。場合によっては、血管の中心に沿った選択された2D平面又は選択された3D体積がイメージされ、又は血管に沿ったスライス線又は分散した位置での流れ方向に垂直な軸から外れた断面でイメージされる。これは、放射を制限することができ、および/または、サンプリングされた位置の大きな領域を含むことができる。このような測定により、対象の異なる領域からの流れを同時に分析し、異なる領域間の動的な関係を特徴付けることができる場合がある。血流、病気、物理的条件及び流体挙動の診断、追跡及び特徴付けは、指標の1つとして、このようなX線測定に含まれ得る。複数のX線エネルギーレベルは、流れの異なるコンポーネントや異なる要素を追跡するために利用されることがある。例えば、白血球と赤血球は異なるX線測定特性を有しており、また、特定のマーカーをターゲットとする造影剤を区別することができる。
このようなデータセットから細胞速度を抽出するために、自動化されたアルゴリズムが使用されてもよい。イメージは、変形している毛細血管、範囲外の速度を有する毛細血管、または赤血球のような移動マーカーを有しない停止した毛細血管、または腫瘍によって生成された毛細血管、または血管変性におけるような無秩序な流動ダイナミクスを有する毛細血管の識別に使用されてもよい。X線用のマーカーや造影剤を加えることで、構造的・機能的な計測が可能になる。
位相差イメージは、血流や流体システムの流体力学の様々な状態を特徴づけ、診断するために利用されるかもしれない。複数のシステムおよび流体の統計的解析は、診断およびトラブルシューティング、または対象の1つ以上の関心領域または1つ以上のコンポーネントまたは1つ以上のターゲットの同定のためにデジタルプログラムおよびAIを使用してモデリングするためのデータを提供することができる。
<2つ以上のモダリティのコロケーション>
X線システムは、PET、又はMRI、又は光又は超音波モダリティとコロケーションされてもよい。コロケーションは、各モダリティのための少なくとも1つの造影剤を含む、1つ以上の解剖学的マーカー又は共通の造影剤及び共役造影剤の測定によって行われてもよい。
X線システムは、PET、又はMRI、又は光又は超音波モダリティとコロケーションされてもよい。コロケーションは、各モダリティのための少なくとも1つの造影剤を含む、1つ以上の解剖学的マーカー又は共通の造影剤及び共役造影剤の測定によって行われてもよい。
さらに、原子z数又は組織が変化した少なくとも2つの材料又は実体を含む物体のイメージを分離及び再構成するためのこのような方法は、異なる検出器又はX線源を異なる場所で使用するか、3D空間内で物体を移動するか、異なる時間に第2又は複数のイメージを撮影するなど、空間内で追加のイメージを撮影することによって空間的にも時間的にも多次元に拡張することが可能である。対象物内の材料のX線イメージが、3D空間内の異なる位置で対象物を撮影したX線イメージから得られる場合、同じ材料を組み合わせた結果のイメージは、3D空間内の対象物とその個々の複合材料の位置と特性についてより多くの情報を与える可能性がある。X線イメージが、例えば、対象物のイメージが撮影されるとき、その都度、複合材料上の選択された点の動的位置を追跡することによって、対象物の個々の複合材料のイメージを導出することができる。物体の構成材料における個々の材料の位置または機能または運動特性に関する情報を得ることができる。例えば、腰椎の屈曲-伸展運動などの脊椎の運動ダイナミクスや、頭頸部の運動や関節のダイナミクス、心拍数のダイナミクスなどを得ることができる。このように、物体全体だけでなく、個々の複合材料の空間的・時間的な動きや特性も含めた機能解析が可能である。
<介入>
イメージガイダンスにおいて、外科手術及びプロセスガイダンス又は自動操縦治療プロセスは、電気生理学のような外科ロボット又は治療治療及び診断、時間感受性測定を含む測定から得られるプロセス及び分析プロセスの学習、1回で及び/又はリアルタイム処理の期間にわたる、エビデンスに基づくガイダンス、コンピュータコマンド、ユーザー(人間及び/又は機械の両方)入力、時間感受性測定及び対象からの事実導出、以前の手順又はシミュレーション手順及びデータセットからの測定分析によるリーム(leamt)能力に基づいて治療又は治療プロセスを導くためにソフトウェアを使用、が含まれ得る。
イメージガイダンスにおいて、外科手術及びプロセスガイダンス又は自動操縦治療プロセスは、電気生理学のような外科ロボット又は治療治療及び診断、時間感受性測定を含む測定から得られるプロセス及び分析プロセスの学習、1回で及び/又はリアルタイム処理の期間にわたる、エビデンスに基づくガイダンス、コンピュータコマンド、ユーザー(人間及び/又は機械の両方)入力、時間感受性測定及び対象からの事実導出、以前の手順又はシミュレーション手順及びデータセットからの測定分析によるリーム(leamt)能力に基づいて治療又は治療プロセスを導くためにソフトウェアを使用、が含まれ得る。
放射線不透過性マーカーは、対象の1つ以上のコンポーネント又はターゲット又は関心領域をより良く可視化するために配置することができる。例えば、電波不透過性マーカーは、インプラントまたはカテーテルまたは外科用プローブおよび生検プローブに配置または統合することができる。
<インプラントの設計>
組織と相互作用するカテーテル又はステント若しくは心臓弁又は外科用具の先端部、又は生検若しくはエネルギー治療のための非接触プローブ若しくは接触プローブの外部は、X線によって測定可能な特定のパターン又は形状及び幾何学的構成を有する、密度、厚さ又はその両方若しくは原子z等の同一又は変化した材料特性、又は材料の組み合わせの異なる領域を有するよう設計することができる。例えば、原子zが変化した異なる材料をX線によって測定される位置に配置して区別し、異なる領域とインプラント又は物体の向き及び空間的位置を、互いの相対的空間位置及び距離に基づいて決定するようにしてもよい。
組織と相互作用するカテーテル又はステント若しくは心臓弁又は外科用具の先端部、又は生検若しくはエネルギー治療のための非接触プローブ若しくは接触プローブの外部は、X線によって測定可能な特定のパターン又は形状及び幾何学的構成を有する、密度、厚さ又はその両方若しくは原子z等の同一又は変化した材料特性、又は材料の組み合わせの異なる領域を有するよう設計することができる。例えば、原子zが変化した異なる材料をX線によって測定される位置に配置して区別し、異なる領域とインプラント又は物体の向き及び空間的位置を、互いの相対的空間位置及び距離に基づいて決定するようにしてもよい。
生体プローブ、ロボット手術用プローブまたはツールチップ、カテーテル、インプラント、温度プローブ、超音波プローブ、圧力センサー、エネルギー変換器などの介入装置は、その装置の一部が異なるレベルでX線を減衰させ、またはルーメン、ガイドワイヤ、バルブ駆動液体処理チューブなどの内部コンポーネント、またはそのシースが装置の残りの部分と異なるX線減衰特性を有することがある。X線イメージングまたは断層撮影システムと組み合わせたこの統合設計により、場合によってはX線測定からのフィードバックで、介入装置の選択部分を移動、制御、監視することができる。
図41は、X線測定及び/又はイメージによってより良く可視化されるように設計された、カテーテル又はステント若しくは心臓弁などのインプラント、又はエネルギー介入プローブの領域の例を示す図である。
インプラント又はプローブ2000には、1つ以上の領域が存在してもよい。例えば、インプラントの領域Aは、X線の1つ以上のエネルギーで特定の測定プロファイルを有する材料又は合成材料で作られてもよい。領域Bは、異なる材料または同じ材料で作られてもよい。カテーテル3000の内腔及びカテーテル3001のシースは、インプラント2000のA又はBとは独立して動く、差動X線測定特性を有していてもよい。
A及びBの距離及び相対的な空間的配向は、空間的にインプラント2000の配向を決定するために測定されてもよいし、ユーザーがインプラントをよりよく制御するために、又はユーザーがA若しくはBの互いに独立した又はA相対B及びその逆の動的空間変化を監視するために領域Bの動き又は状態に対するAの動きを監視するために、及び/又は、AとBおよびインプラントが配置される対象の他の解剖学的マーカーまたは基準部品または基準位置との相対的な関係を監視するために、使用されてもよい。
場合によっては、領域A内の材料は、異なる空間位置で異なる密度によってセグメント化されてもよい。
そして、そのようなハードウェア及びソフトウェアシステムは、光学、MRI、超音波、光音響、磁性粒子、PET又はSPECTなどの核医学に基づくシステムと統合されてもよい。
カテーテル又はワイヤープローブ、又は介入処置用の小型モータ駆動ロボット、及び治療薬又は造影剤などの診断薬を送達するためのコンピュータ制御又はユーザー制御バルブが、より良く可視化されることができる。図35のa、b、c、dは、エネルギーブレーションのプローブまたはカテーテルclOlまたは電極と液体吸引hlOOのための開口の様々な例を示しており、多くの機能を実行でき、遠位位置でコンピュータまたはユーザーによって制御される小型ロボットは、試薬を運ぶためのチューブと平行してシースの内部にあることができる。小型ロボットの異なる部分は、介入装置の他の部分と区別するために、X線減衰特性を有していてもよい。図35bのカテーテルは、治療、治療及び診断、電気生理マッピング及び電極のようなイメージ、RF焼灼術又は超音波焼灼術のためのelOO、光プローブのためのコンポーネントを含んでもよい。カテーテルまたはプローブ内には、液体または溶液を保持するためのポリマー材料または繊維または光ファイバー材料で構成された、例えば液体を保持する構造的手段を含むチューブなどの物質を保持するシースおよび/またはハードウェア機構が存在してもよい。場合によっては、X線減衰材料は、スペクトルイメージング法などのX線測定で他と区別できるように十分な構造内に介在していてもよい。シースまたはホルダまたはチューブの開口部は、液体、溶液または物質が、遠隔地または遠位位置から制御されて、チューブの外部の組織または領域に注射可能または噴霧可能な1つまたは複数の開口部hlOOに接続または整合してもよく、機械または圧力制御を介してコンピュータまたはユーザーによって与えられるデジタルコマンドに基づいて閉鎖および開放できる、バルブがあってもよい。液体を吸引するために、同じサイズまたは変化したサイズの1つまたは複数の開口部があってもよい。開口部hlOOは、最大表面積に達するように向きを変えたり、確実にカバーするために密度を変えたりすることができる。
液体又は溶液又は物質は、ROI及び/又はVOIの組織内にあるマーカー又は複数のマーカーと結合し、複合体を形成するために使用される、薬剤、又は薬剤複合体、造影剤又は複合造影剤、抗原結合抗体又はその複合体、ターゲット分子、又は中間分子であってもよい。
液体または物質を放出するための開口部または穴hlOOは、カテーテルまたはプローブの先端、あるいはロボットまたはカテーテルまたはプローブの外部の領域とインタフェースする小型化ロボットの任意の部分であってよい。
カテーテルまたはプローブまたはチューブまたはロボット内の液体または物質のホルダーの本体または外面は、柔軟な形状、例えば図40bと図40cと図40dのように籠状または風船状であってもよい。dのように、柔軟で制御可能な機構によって制御され、物質又は液体が送達される領域の最大範囲を保証する。例えば、注入装置の圧力力又は他のエネルギー、磁気又は電気機構を介して、ユーザーの力による手動操作又はユーザーが溶液又は物質の吸引又は注入に関わる動きを制御するデジタル方法を制御する自動機構によって、制御可能である。
開口部の領域又は開口部の大きさは、場合によっては機械的な機構によって調整することができる。代替的に、プローブ又はカテーテル又は小型化ロボットは、ワイヤなしで遠隔制御されてもよい。
一実施例では、最適な送達を確保するために、コントローラー端部又は溶液の源から最も遠位の開口部は、より近位の領域よりも大きなサイズを有していてもよい。
ボール形状、またはカプセル形状、または他の3D形状の送達容器は、浸透性評価またはターゲットのイメージングのための、またはターゲット溶液送達のための領域をスプレーする液体または溶液用のプローブ、ロボットまたはカテーテルまたは送達チューブの1または複数の方向または領域に、1または複数の穴または開口部hlOOを含むことが可能である。
また、インプラントや手術器具の関心領域や治療領域を特定する状況では、カテーテルやインプラントと一体化した、あるいはそれに取り付けた前述のプローブやチューブ、液体注入装置を用いて、関心領域や関心領域の一部に特異的に結合できるターゲットリガンドで機能化した造影剤を注入または噴射することによって領域を特定しても良いだろう。造影剤の変位または造影剤結合領域の配置は、外科用具またはプローブ、または生検用具のインプラントの配置を誘導するために使用されてもよい。
いくつかの場合において、プローブ、ロボット又はカテーテル、インプラント又は外科用プローブ又は手術用具又は生検用具は、放射線不透過性である。
いくつかの場合において、プローブ、ロボット又はカテーテル、インプラント又は外科用プローブ又は手術ツール又は生検ツールの1つ以上の部分は、カルシウム又は亜鉛、金属又はヒト又は生きた対象に内因性である放射線不透過物質の類似又は変動した密度又は厚さを有する1つ又は複数の領域を含むことが可能である。
図41は、X線測定のために設計された1つ以上の領域を有するインプラントの一例を示している。
いくつかの例では、プローブ、ロボット又はカテーテル、インプラント、又は外科用プローブ又は外科用具又は生検用具は、プローブ、又はカテーテル又はガイドワイヤの異なる部分又は異なるコンポーネント又は異なる部分において異なるレベルで放射線不透過又は減衰している。手術用具の先端部、カテーテル、生検プローブ、温度プローブ、超音波プローブ、及び/又はインプラントは、多数の構成要素を含むことができ、それぞれの各部分又は一部は、背景及び装置の他の部分と区別するために異なる減衰特性を有することができる。そのため、各部分は、動脈アクセスシースのように、X線測定フィードバックを与えられて制御及び監視されてもよく、又はシースの一部は、介入装置と異なる減衰特性を有してもよく、シースの内部ルーメンは、シースの他の部分又は介入装置と異なる減衰特性を有してもよい。例えば、図41中のステント2000を送る場合、カテーテルは、内空を有するシース2001を有することができる。内空内には、ガイドワイヤ2002に接続されるステントが設けられている。ステント、シース、ガイドワイヤのそれぞれは、X線減衰特性が異なる同一または異なる造影剤を有していてもよいし、同一造影剤で密度が異なるものであってもよい。また、それぞれの一部はX線不透過性であるため、追跡が可能である。また、低放射線量化が望まれる場合には、介入装置またはその一部の所定の仕様に基づく模擬的な計測を行うことができる。経頸部処置では、例えば、遠位端及び近位端、血液導入ポート、並びに前記第1の閉塞部材から近位に延びる第1のシャフト部分を含むカテーテルなど、多数の装置又は装置の構成要素が使用され得る。第1のシャフト部分は、総頸動脈に挿入可能な大きさの断面を有し、総頸動脈への経頸部アクセスに適している場合がある。
装置は、カテーテルの血液入口ポートと流体連通している流体導管を含み、血液がカテーテルを通って流体導管に流れることを可能にすることができる。
装置は、流体導管に直接接続された流量センサーを含んでもよく、流量センサーは、流体導管を通る血流を検知する。
装置は、血液を収集し、前記カテーテルに接続され、流体導管を介して前記血液入口ポートと流体連通するように配置される密閉チャンバーを規定するレセプタクルを含む収集リザーバを含んでもよい。流体連通は、動脈血圧以外の流体圧力源の支援なしに、前記血液入口ポートから前記収集リザーバへの流体流路を介した連通を含むことができる。
装置は、流体導管に結合された計量弁を含んでもよく、計量弁は、流体導管を通る流量を調節する。
装置は、総頸動脈に導入されるように適合された動脈アクセス装置を含んでもよく、動脈アクセス装置は、動脈アクセス装置の遠位領域における遠位開口から動脈アクセス装置の近位領域における近位開口に延びるルーメンを備え、ルーメンは、総頸動脈からの遠位開口を通る逆行性の血流を受け取るように構成される。
装置は、動脈アクセス装置の遠位開口部と近位開口部との間の位置で動脈アクセス装置の内空に流体的に接続された内部シャント内空を有するシャントを含んでもよく、内部シャント内空は、動脈アクセス装置の遠位開口部と近位開口部の間の位置で動脈アクセス装置の内部管内から流れ出る血液用の経路を提供する。
装置は、シャントに結合され、シャントを通る血流を制御するように適合された流れ制御機構を含んでもよい。
これらの装置構成要素の各々は、スペクトルイメージを用いたX線測定によって区別できる材料で作られてもよい。
<研究、NDT、ハイスループット測定>
非人間的な用途では、放射線安全性のために囲いが必要な場合がある。図8は、筐体99に囲まれたX線断層撮影イメージシステム200を示す図である。光センシング又はモーションセンシングシステム200は、光源を含むことができる。センサーは、筐体99内の関連性のある活動を監視するために筐体99内に配置することができる。このような筐体は、鉛シールド及び又は音響シールドを有することができる。
非人間的な用途では、放射線安全性のために囲いが必要な場合がある。図8は、筐体99に囲まれたX線断層撮影イメージシステム200を示す図である。光センシング又はモーションセンシングシステム200は、光源を含むことができる。センサーは、筐体99内の関連性のある活動を監視するために筐体99内に配置することができる。このような筐体は、鉛シールド及び又は音響シールドを有することができる。
そして、典型的なマイクロCT、生体内光学イメージング、PET / CT装置で行われているように、多数の液体処理装置とサンプル処理装置と保存装置が筐体内に統合されてもよい。
創薬、診断、ライフサイエンス研究、ICT生産における品質検査や故障解析、セキュリティ用途では、解析や事実認定のためのデータ収集のために、多くの異なるサンプルに対する高速データ取得が必要となる。
マイクロ流体チップ上の3D組織研究、小動物またはエクスビボ(exo vivo)動物組織での薬剤試験またはリード・スクリーニング、あるいはデジタル病理学において、異なる患者からの複数の組織またはサンプルを同時にスクリーニングするために、1つのX線システムまたは複数のシステムが同種のまたは異なるサンプルに対して同時に動作するX線システムが使用可能である。
場合によっては、検出器は、X線、UVなどの光信号、またはNIR信号をすべて同時に測定することが可能であってもよい。同じピクセルがすべての測定に使用されてもよい。同じ検出器の異なるピクセル又は異なる検出器が、異なるモダリティの測定に使用されてもよい。
図12は、2D及び/又は3Dスペクトル測定が可能なシステムを含む高スループットX線システムを示している。
例えば、1つの検出器の選択された領域は、対象2、3、4、5、6をそれぞれ測定する。このような測定は、例えば、各対象から出る透過X線の場合など、同期していてもよいし、同期していなくてもよい。一般に、対象は、各サンプル位置において異なるか又は同じである。しかしながら、異なるセットのプローブ又は分子プローブ又は造影剤又は分子造影剤を使用することができる。いくつかの例では、分子、マーカー、特定の材料などのコンポーネントを相関させ、監視し、時間、場所、順序、存在及び/又は変化及び/又は可視性、場合によっては相互作用の観点から相対関係を特徴付けるために、対象2、3、4、5、6は、対応する、2S1、3S1、4S1、5S1、6S1などの異なるROIを1つの対象で有することができる。
図13は、2D及び/又は3Dスペクトル測定が可能なシステムを含む、別の高スループットX線システムを示す図である。図12と同じ検出器の代わりに、200-2、200-3、200-4、200-5、200-6のような異なる検出器を使用して、1つの放射線放出位置を使用して対応する各対象又は関心領域を監視することができる。
図14は、2D及び/又は3Dスペクトル測定が可能なシステムを含む高スループットX線システムを示している。1つのX線源の代わりに、1つの源上の2つ以上の異なるX線放出位置が使用されてもよく、各X線放出源は独立して制御されてもよい。このような線源は、複数のピクセル化線源、フィールドエミッタ線源、ビームスプリッタ、グレーチング、またはコリメータ生成X線放出線源とすることができる。12-1から12-5の各線源は、1つ又は複数の検出器と対になっていてもよい。
場合によっては、X線拡大装置は、X線ビームを平行化するためのX線コリメータ、領域内のフラックスを増加させ、時間的に、X線コンデンサー、ビームアパーチャ、対物レン、が小さい関心領域を拡大し測定するために用いられるような、X線源と検出器の間のX線照射経路に配置することが可能である。
図15a及び図15bは、人間のイメージング設定と同様、人間以外において使用され得るX線断層撮影装置の一例を示す図である。外部基準コンポーネントERC、例えばMBR-1及び/又はMBR2は、照射されて検出器アセンブリ22によってイメージ化される対象2ROI-1に対して内部コンポーネント2c-1を空間的に位置付けるために使用される。検出器アセンブリは、1つの検出器、又は図示のようなビームセレクタを有するデュアル検出器アセンブリであってもよく、又はビーム粒子ストッパー及び検出器を含んでもよく、又は検出器層のスタックであってもよく、いくつかの場合、エネルギーレベルに対する各層検出器(例えば、上部検出器層が低エネルギーシンチレータ層又は下部が高い位置及び高いエネルギーレベル)であってよい。ERC、MBR-1または2を通過した一次線PR1-34は、2c-1を通過した一次線PRx-34に対して空間的に位置決めされる。物質分解やX線測定可能な特性に基づく測定により、2c-1を対象物の他の部分から分離すれば、2c-1の位置を特定することが可能である。MBR-1と2c-1の両方について、線源から異なるX線放出位置で2回目の測定を行えば、関心コンポーネントである2-1について、X線に垂直な座標軸を含む相対空間位置が得られる場合がある。MBR1および/またはMBR -2は、X線照射経路の下であればどこに配置してもよい。MBR-1またはMBR-2は、対象の内部にあってもよい。例えば、密度、形状、組成、及び線源に対する空間的位置が既知のコンポーネントであってもよい。場合によっては、MBR-1 または MBR-2 は不要である。
図16は、ROIの弾性の測定を統合することができるX線断層撮影装置の一例を示す図である。超音波トランスデューサUST-1は、線源12と検出器29との間においてイメージされるべき軟組織の隣に位置する。例えば、脳イメージングにおいて、トランスデューサは、頭蓋骨内の軟組織への開口部、空気又は眼球又は他の開口部の真横に配置され得る。検出器29は、場合によっては取り外すことができる。そして、プレート100による散乱除去は、代替の装置及び方法を用いて実施されてもよい。そして、場合によっては、散乱体除去は不要であってもよい。そして、X線コーンビームは、代替的に、線源12の下流にあるコリメータを使用することによって、ファンビームまたは分散型X線細線ビームによって実施されてもよい。
図17は、ほぼリアルタイムの位相コントラスト及び/又はフーリエ変換デバイスが可能なX線システムの例を示し、いくつかの実施例では、前述のPCT出願に記載されている通りである。ビームスプリッタ、グレーチングなどのX線オプティクスは、検出器上で測定される干渉パターンを生成するために使用される。X線システムは、ほぼリアルタイムの位相コントラストを有する装置、及び/又は散乱除去処理技術と組み合わせたフーリエ変換が可能な装置とすることができる。例えば、ビームパーティクルストッパー装置やインターポロレーションを使用して、散乱線と一次線の比率を1%未満または5%未満に低減し、空間および周波数領域での測定を向上させる。
図18は、X線断層撮影測定装置の他の実施例を示す。超音波トランスデューサは、線源と検出器の間でイメージ化される軟組織の隣に位置する。例えば、脳イメージングにおいて、トランスデューサは、頭蓋骨内の軟組織への開口部、空気または眼球または他の開口部のすぐ隣に配置することができる。
超音波トランスデューサUST-1又は音響発生器などの2次元せん断力発生器は、音源と検出器の間にあるイメージされるべき軟組織の隣に、接触して又は接触せずに配置される。例えば、脳のイメージングの場合、頭蓋骨内の軟部組織の関心領域への開口部、空気や眼球などの開口部のすぐ隣にトランスデューサを配置することができる。S20は、装置を制御するためのコンピュータプロセッサを有するコントロールボックスである。いくつかの実施例では、このようなコントロールボックスは、イメージングシステム内の他のハードウェアを制御するマザーボードと一体化されている。X線システムは、ビームセレクタモジュール、またはビーム粒子ストッパープレート、100と統合された検出器、または1つ以上のPMT、または光子計数検出器、分光器、分光吸収測定モジュールを備えたデュアル検出器であってもよい。そして、場合によっては、散乱除去は必要ないこともある。そして、場合によっては、散乱除去は、散乱を一次線の1%未満又は5%未満に減少させるために行われる。いくつかの実施例では、X線ビームは、1つ以上のコーンビーム、又は1つ以上のファンビーム、又は多数の分散したX線細線ビームであってよく、これは、線源2から下流のコリメータを用いることによって、又はX線を発生しない領域を有する陽極ターゲット、又は選択された領域のみがX線を発生するチューナブル陽極ターゲットを用いて実施することができる。
<DNA又はRNAの配列決定>
分子の特定及び検出において、例えば、造影剤でタグ付けされたナノボディ又は低分子は、本明細書に記載のX線イメージング及び測定システム及び方法によって測定可能であり得る。分子は、アミノ酸ベースの分子及び複合体、タンパク質断片、及び/又は核酸ベースの分子、脂質、糖タンパク質、希少元素及び複合体又は上記とナノ粒子等の他の金属元素との組み合わせを含むことができる。
分子の特定及び検出において、例えば、造影剤でタグ付けされたナノボディ又は低分子は、本明細書に記載のX線イメージング及び測定システム及び方法によって測定可能であり得る。分子は、アミノ酸ベースの分子及び複合体、タンパク質断片、及び/又は核酸ベースの分子、脂質、糖タンパク質、希少元素及び複合体又は上記とナノ粒子等の他の金属元素との組み合わせを含むことができる。
本開示は、X線測定によるDNA及びRNA配列決定のイメージング及び測定を含む、特に単細胞DNA及び/又はRNA配列決定の場合、例えば、磁石及び抗体コンジュゲートを使用して単細胞を検出することである。
本開示は、造影剤に基づくX線測定を、蛍光色素のような光学測定用色素の代わりに使用し、及び/又は光学測定用の分子プローブ若しくは色素、又はハイブリッドイメージングシステム若しくはマルチモダリティイメージング及び測定システム用の質量分析法(mass spec)若しくはマルディ(maldi)と結合させることができるようにする。
本開示は、単一細胞のRNAまたはDNA配列決定のような、ピコグラムまでの少量の分子に結合するナノ粒子または造影剤の測定を可能にする。特に、当然ながら、単一細胞が特定の配列の十分なRNAコピーを生成し、X線測定可能な要素またはナノボディもしくは抗体変種または低分子と結合する分子などの分子は、例えば、RNAまたはその相補DNAペア、またはRNAによって生成されるペプチド、または転写および翻訳のための分子経路における1または複数の分子に結合して検出および識別され得る。
このような配列決定及び小分子検出は、生体内、又は生体外、又は生体外サンプルのフォーマットで行われることができる。
現在の単一分子検出及び単一細胞RNA及びDNA配列決定技術では、細胞又は組織は、様々な方法、例えばレーザーマイクロダイセクションによって分離され、次に、例えば、マイクロ流体機構、液滴、マイクロ流体によって分離されて、cDNA相補鎖が付着されるか又は増幅が生じてcDNAライブラリを生成してサンプルを得、かかるサンプルが整列、重複排除、ユニークリードが行われ数値化される。本工程で使用する標識や造影剤は、1種類以上のX線造影剤であってもよく、蛍光標識の代わりにX線測定によりユニークリードを検出してもよい。X線測定は、透過X線、蛍光X線、散乱X線、または非線形X線であってもよい。
これに対して、本明細書に記載のシステムは、単一光子放出断層撮影(SPECT)イメージングシステム及びその付属装置、超高エネルギーコリメータ(UHEC)、減衰補正装置(ACD)、陽電子放出断層撮影(PET)イメージングシステム及びその付属装置、同時計測装置(CID)及び核断層撮影装置(NTS)及びその付属装置、光学計測システム、音響計測システム、熱ベース計測システム、エネルギーベース計測システムと併置されても良い。解剖学的マーカーまたは位置マーカーまたは位置マーカーを内部または外部で使用することによって達成されてもよい。コロケーションシステムの場合、1つのモダリティのための造影剤が本システムに使用されてもよいし、1つのモダリティのためのかかる造影剤が、本システムによって識別及び位置決めされる1つ以上のマーカー及び/又は1つ以上の物質とコンジュゲートしてもよい。
本開示は、ライブセル及びライブアニマルイメージングを提供する。
対象はサンプルステージ上に固定されず、例えば、ケージ内の生きた動物、又はマイクロ流体チャネル若しくはサンプルスライド内で移動する細胞若しくは分子など、生きている及び/又は自由に歩き回る。
本明細書に開示されるX線イメージングシステム及び装置のX線測定値、例えば、ボクセル又は指定領域及びそれ又はそれらの空間位置のスペクトル測定値又は導出値、又は時間領域又は周波数領域における測定値は、関心領域の測定に使用されてもよい。
従来のイメージシステムでは、対象又は関心領域に埋め込まれた3D及び/又はスペクトルの方法及び詳細を利用できない。
光学的測定又は分光測定に使用される造影剤又はラベル若しくは色素を従来使用していた他の生体外サンプル測定は、X線造影剤と組み合わせたX線測定に置き換わってもよい。
例えば、DNAシークエンシングやプロテイン・ウェスタンブロット、あるいは造影剤や指示薬を用いた光学的手法や電気化学的手法は、X線感受性の造影剤や複数の造影剤で置き換えることができる。
金属やX線感受性物質の結合・非結合元素の材料分解法による測定・検出は、多次元イメージングや測定と組み合わせて行うことができる。
X線測定装置、又はコンピュータ断層撮影装置は、2D及び3Dフォナートで、2D測定からの3D X線イメージ及び再構成、並びにイメージングからの派生データの表示を提供することができる。このような装置の使用は、従来のCT、または定量的X線イメージング、またはデンシトメータ、CT、デンシトメータおよび定量的X線の手順と同様の医療手順、またはPETまたは光イメージング法、光音響法などの他のモダリティとのハイブリッドシステムを使用するものと同様の医療またはイメージングおよび測定手順および/または方法を含む場合がある。このような装置は、解像度、エネルギーレベル、露出、視野及び又は関心領域、バイオマーカー、PET及び他のイメージング及び測定モダリティとのハイブリッドイメージング、造影剤を提供してCT様又は濃度計様又は定量的X線様又はPET/CTハイブリッド様、SPECT様又はX線ハイブリッド様又はX線なしの、X線とは異なるモダリティの測定及び/又はイメージングで最適化したイメージング法で使用することができる。例えば、そのようなイメージング又は測定は、直接使用されてもよいし、CT、PET、SPECT、MRI、光学イメージング及び分析、光音響、超音波、熱イメージング等によるp測定及び/又はイメージング及び/又は提示をシミュレーションするためのデジタルプログラムによって訓練又は後で使用されてもよい。
このようなイメージ及び/又は測定、並びに関連する注釈、ラベル、テキスト及び音声マーカー及びラベルは、デンシトメータ又はPET/CTハイブリッド、SPECT顕微鏡、光学測定、MRI及び他の前述のモダリティなどの従来のCT様イメージ及び/又は測定、並びに定量X線イメージング及び測定のイメージング方法及び測定方法のために開発された人工知能アルゴリズムによる解析及び/又はトレーニング及びポスト処理用であってもよい。
従来のCT及び他のモダリティのこのような解析は、セグメンテーション、マーカーの空間的位置決め、定量化、追跡、流体力学、灌流、カルシウムスコアリング、バイオマーカー評価、物質分解、スペクトルCT、深層機械学習、体積測定及び注釈、ラベル、診断のための参照付け、予後及び追跡および欠陥分析、監視及び観察を含んでいる。
イメージ及び測定の結果、従来のCT又はデンシトメータ又は他の定量的X線イメージング法及び光学イメージング、MRIなどの他の前述のモダリティのデータと同様の合成及び/又は抽出又はセグメント化、又はROIデータ、例えばある厚さのイメージの1又は複数のスライスしたものを提供することができる。回転スキャナCTが提示し、ほぼ同様の定量値を提供し得るものとほぼ同様に、1つ以上のエリア検出器、または光子計数検出器、または光子感受性検出器またはPMT、または分光器アセンブリの測定によって得られる3Dまたは多次元データから、例えば、本明細書に記載されるX線イメージング装置および方法とその継続を用いて、提供することができる。X線測定値の提示は、X線測定値を、異なるモダリティ又はX線ハイブリッドモダリティの測定値と空間及び時間及び周波数で相関させ、光干渉断層撮影及び/又は多光子顕微鏡のものと同様に、光蛍光及び/又はナノ粒子又は量子ドットマーカー測定値をシミュレーションし、光学分光法及びMRIのものと同様にラマン散乱を行うために使用されてもよい。
Al開発における医師、放射線技師、研究者、分析者等のユーザーの経験や訓練された知識により、3次元X線イメージや2次元X線測定・表示が、より良い解像度やスペクトルデータで再構成されたとしても、その結果と放射線技師や他の専門家が得た予備知識とを結びつけることが難しく、学習カーブが存在する可能性がある。X線装置のトレーニングが必要な時期や、CTスキャナや他のモダリティでのイメージ履歴から過去の測定事例と結果を関連付けるために、トレーニングした専門家に馴染みのあるフォーマットで3Dデータを提示することが有効であると考えられる。しかし、既存のインタフェースとは異なる可能性のある新しいイメージングシステムのインタフェースのコンテキストで提示されるたった1つのCTスライスしたイメージは、イメージデータ全体がCTスキャナのイメージフォーマットで提示されない限り理解されない可能性がある。
このようなX線イメージングシステムは、異なるモダリティのAlプログラムを訓練するため、又はデジタル病理学若しくは創薬若しくは研究で使用されるユーザー及びデジタル・プログラムにデータを提供するために使用されて、X線測定又は異なるモダリティのシミュレーション測定と実際の測定によって行われたケースとを以前に相関させて、事実を導き、異なる時間及び場所からモダリティ及び測定間のデータベース又は関係を確立することができる。
X線源、又は異なる検出器などの異なるハードウェアを使用し、及び/又は露光時間、及び電流などの異なる設定での測定値を定量的に相関させるために、X線関連モダリティと同様に他のモダリティ又はハイブリッドモダリティのX線定量測定値のデータベースが構築されてもよい。エネルギーレベル及び視野及び各物質、又は複合物質又は1コンポーネント又は2つ以上のコンポーネントに対するX線入力レベル、例えば、異なる設定を用いた異なる時間及び条件でのX線測定及び本開示の測定、従来のCT、MRI、他のモダリティ及びハイブリッドが定量的に相関され得るように設定される。
例えば、造影剤あり及び造影剤なしの空間的及び時間的な心臓のMRI測定は、本開示の模擬X線測定と相関させてもよい。
特定の設定及びシステム設計及び方法を有する従来のCT測定は、本開示のX線測定と相関していてもよい。
人間の視覚及び他の感覚に関連する測定又はデジタルイメージング及び/又は測定は、本開示のX線測定と相関してもよい。
本開示のX線測定は、人間の視覚及び/又は他のデジタル機械視覚プログラムに馴染みのあるイメージを合成し、診断、人間の判断、人間機械インタフェース、追跡、物体故障分析及び欠陥分析、時間追跡、予後、監視及び監視、並びに運動検出、流体の特性化、動的運動及び生理学的、機械的、空間的、時間的、人工的、合成、関係、運動、エネルギー摂動、化学特性、機械、弾性特性及び他のパラメータに関する他の関連測定に対してユーザー又はデジタルプログラムに馴染みの測定データ及び/又はその提示を提供することができる。
MRI及び従来のCT並びにデンシトメータ及び定量的X線測定で訓練されたアルプログラム及びアルゴリズムは、本開示のX線システムによって提供される測定データと共に使用されてもよく、その逆もまた同様である。
X線システム及び装置は、様々なイメージング及び/又は測定モダリティからのデータ、特に定量的測定のもの、を定量的に関連付けるための基準として使用することができる。
X線システムは、以下の1つ以上の要素を含んでもよい。
「パーソナルCT」又は「カスタマイズCT」の1つ又は複数の機能及び特徴又は装置及び/又は方法であって、モードにおいて有するか、CTスキャナイメージのフォーマットにおけるイメージのセットを生成するか、イメージ及び測定値を表示するか、スイッチオン又はユーザー若しくはデジタルプログラムによって選択され得る表示設定を有することができるもの。例えば、スライスされたイメージ、2Dイメージ又は断層撮影イメージ又はセグメント化されたイメージ及び通常CTイメージ又は表示又は解析ソフトウェアで表示される1つ又は複数のパラメータに対する値を表示するために、例えば造影剤あり又は造影剤なしで、ほぼコンベンションCTスキャナ又はスペクトルCTスキャナに類似したものである。このようなイメージは、Alを含む従来のCTビューアー及びCTデータ読み取り及び分析プログラムによって読み取られるように、CTスキャナイメージ形式のファイルのセットとして保存及び出力されることができる。
X線システムはまた、既存の放射線技師又は医師が精通している従来の装置及び方法を使用して、又はそのフルオロスコープと同様の一連のX線イメージを表示するフルオロスコープモードなどの、時間的に変化するシリアル3Dイメージモードで実行することができる。
X線システムは、部品又は完全な個人化されたCTシステムを含むことができ、又は本明細書に記載された測定値を使用することができる。
X線システムは、1つのモード又は設定を有するか、又は、パーソナライズドCTイメージ、又は精密イメージ、又はパーソナライズド精密CTイメージと呼ばれるイメージのフォーマットを提供するか、関心領域及び/又はイメージ対象のイメージ上又は測定結果から直接測定、合成又は再構成され構築されたイメージを表示してもよい。そして、このようなイメージの背景は、2次元または3次元イメージ、あるいは多次元イメージであってもよい。
2つ以上の検出器、各検出器に対する1つのビーム粒子ブロッカープレート、及び1つの移動体、例えば各ビーム粒子ブロッカープレートに対する1セットのアクチュエータが存在する場合がある。場合によっては、検出器、ビーム粒子ブロッカー及びビーム粒子ブロッカー移動体を、第1のセットの検出器、ビーム粒子ブロッカーと相対的に移動させることができる別のセットのアクチュエータ又は移動体が存在する。
微小血管の密度および形態および流体力学、腫瘍および周辺組織の密度、腫瘍マーカーターゲット造影標識、および分子プロファイル(体全体の分子、細胞内外の分子、腫瘍の成長段階および転移段階に関連する1以上の分子の濃度)を測定して、機械学習アルゴリズムのための入力として、診断、予後、治療成果および治療成果の予測、治療計画、監視およびAlを用いて利用してもよい。
腫瘍以外の疾患も同様にモニタリングすることができる。
また、ビーム粒子停止板の下に2つ以上の検出器を積層してもよく、例えば、一方は高エネルギー、他方は低エネルギー、または検出器は異なる分光感度およびフレームレートを有するものが積層されてもよい。そして、2つ以上のエネルギーのイメージを同時に取得できるように、X線ビーム操向器または電子ビーム操向器または移動体を有する1つ以上のX線源が、1つ以上の場所に配置されてもよい。各X線源は、視野を制限したり、視野を制御したりすることができる。
カルシウムのスコアリングは、多次元測定なしで、又は多次元測定で、又は3次元測定で達成されるかもしれない。複数のX線エネルギー分解法では、カルシウムは軟組織から分離されてもよい。本明細書に記載の2Dデュアルエネルギー又はスペクトルイメージング方法を用いる場合、心臓又は他の軟組織に埋め込まれたカルシウム内容は、カルシウムと骨が重なっている場合、最初に骨を除去することによって分離されてもよい。骨はゆっくり変化する性質があるため、隣接するピクセルの測定値から補間値を得ることにより、骨を心臓のカルシウムから分離することができる。3Dイメージの場合、骨の領域は計測された体積からセグメント化され、カルシウムの計測値が得られる可能性がある。胸骨と心臓のカルシウム領域が重なることによる投影イメージの影響を除去するために、異なるX線照射位置に複数の角度計測を配置することができる。
<特定の用語の定義>
「パーソナライズド又はカスタマイズ可能なCT」システムとは、ビーム粒子ストッパープレート、ビームセレクタ又は飛行時間型光源を用いて、99%以上、又は95%以上の散乱除去が可能、又は前述したように散乱を一次粒子の5%未満に低減することができる装置及び方法によるX線イメージングを含むものである。デュアルエネルギーまたはスペクトルイメージングが可能であってもよいし、多次元X線イメージングが可能であってもよいし、時間依存のX線測定および追跡またはモニタリングX線測定が、点、1Dまたは2D、7D(時間による6D)までの3D、または位相差イメージング、または他のモダリティおよびイメージング経路に加えられる他のX線オプティクスによるイメージングが可能であってもよい。毎回行われる測定やイメージングの種類は、例えば、そのような測定が有用であり、測定が必要である場合など、ケースバイケースである。例えば、イメージング診断において、骨密度を測定するためにデンシトメトリーが必要な場合や、対象物に埋め込まれた部品や関心領域の動きを監視する必要がある場合に、X線ビームがデュアルまたはマルチエネルギーで測定される。
「パーソナライズド又はカスタマイズ可能なCT」システムとは、ビーム粒子ストッパープレート、ビームセレクタ又は飛行時間型光源を用いて、99%以上、又は95%以上の散乱除去が可能、又は前述したように散乱を一次粒子の5%未満に低減することができる装置及び方法によるX線イメージングを含むものである。デュアルエネルギーまたはスペクトルイメージングが可能であってもよいし、多次元X線イメージングが可能であってもよいし、時間依存のX線測定および追跡またはモニタリングX線測定が、点、1Dまたは2D、7D(時間による6D)までの3D、または位相差イメージング、または他のモダリティおよびイメージング経路に加えられる他のX線オプティクスによるイメージングが可能であってもよい。毎回行われる測定やイメージングの種類は、例えば、そのような測定が有用であり、測定が必要である場合など、ケースバイケースである。例えば、イメージング診断において、骨密度を測定するためにデンシトメトリーが必要な場合や、対象物に埋め込まれた部品や関心領域の動きを監視する必要がある場合に、X線ビームがデュアルまたはマルチエネルギーで測定される。
特発性肺線維症、ウイルス又は細菌によって誘発された病理学、例えばcovid19、又は結核などの肺疾患の診断では、関心領域は、胸部全体ではなく、肺の一部分のみをイメージ化又は定量化する必要がある。肺の一部分のみが、そのような測定に基づいて提供される可能性のある臨床的価値に基づき、深さ方向に選択された解像度で、3Dでイメージ化されるように選択される。そのような関心領域は、1つ以上のエネルギーレベル及び材料分解で胸部全体の2Dイメージを必要とする場合があり、及び/又は3D低解像度イメージを必要とする場合があり、又は静止又は移動可能な1つ以上のX線源で複数の角度から1D、2D又は3Dイメージングを必要とする場合がある。
癌組織イメージングでは、イメージングの前に投与される造影剤、例えば腫瘍指標又はマーカーに特異的な分子造影剤があってもよい。
関心領域は、組織タイプ、又は血管系及び微小血管、血液の流動ダイナミクス、又は細胞外マーカー若しくは細胞内マーカー、又は密度の定量化、形態学及び他の化学検査並びに患者プロファイル及びイメージング履歴に基づく1つ以上の選択基準の組み合わせなどの1つ以上のパラメータに基づいて定義されてもよい。
手術のガイダンスでは、関心領域は継続的に定義され、修正される。
骨の骨折では、関心領域は、損傷した骨の密度及びイメージ、隣接する骨又は隣接する骨との相対距離及び/又は軟組織のそれに基づいて、異なるように定義される。
それぞれの例において、関心領域を定義するプロセスは、例えば、手続き的プロセス及び/又はイメージ方法において、異なっていてもよい。
そして、3Dイメージングの解像度は、各アプリケーション及び各イメージングのケースで異なっていてもよい。
また、散乱除去処理は、測定ごとに必要な場合もあれば、不要な場合もある。
点又は1D又は2D又は再構成された3Dイメージの選択は、イメージング処理中に各アプリケーションで異なり、及び/又は個々のケースに基づいて選択される。
異なるコンポーネント及び材料は、2次元及び多次元でのより良い提示及び視覚化のために、1つ以上の可視の狭い及び/又は広い光の波長で表現され得る。
<重ね合わせた組織の交換及び視覚化のための方法>
2Dスペクトルイメージングデータは、これまでCTによって行われていた診断や監視・追跡のために提示・表示されることがある。しかしながら、イメージ調整に使用されるソフトウェアツールが密度及び厚みに基づく測定とは異なるプロセス及び基準を有するので、表示において生じるかもしれないアーチファクトのためにデータを表示する際に課題が存在する。
2Dスペクトルイメージングデータは、これまでCTによって行われていた診断や監視・追跡のために提示・表示されることがある。しかしながら、イメージ調整に使用されるソフトウェアツールが密度及び厚みに基づく測定とは異なるプロセス及び基準を有するので、表示において生じるかもしれないアーチファクトのためにデータを表示する際に課題が存在する。
2次元定量データの改善された視覚的表示の一例を以下に示す。
本開示は、その重なった軟組織X線投影イメージ上の骨干渉を除去する方法、又は代替的に、骨X線イメージ内の軟組織を除去する方法を提供し得る。本方法は、二次元デュアルエネルギーX線イメージハードウェアシステムの使用に基づくものである。本方法は、3つの主要な手順を含むことができる。(A)デュアルエネルギーX線イメージングハードウェアシステムを通じて、骨構造によって重なり合った関心軟組織を含む対象について、高エネルギーレベルH、及び低エネルギーレベルLのデュアルエネルギーイメージのペアを取得すること。(B)デュアルエネルギー分解法を使用して、取得したデュアルエネルギーX線イメージペアデータを二つの材料組成イメージ、人体軟組織イメージ及び骨イメージ、に変形すること。これは、所望のイメージ情報が存在する軟部組織イメージに課される骨イメージの直接的な干渉を除去するためである。(C)引き続き、軟組織内部で元々骨が占めていた空間による骨に関連する間接的な干渉効果を補償して、軟組織イメージを改善する。補償方法は、2つのステップを含むことができる。(1)同じ幾何学的条件が維持されるような方法で、元々分解された骨イメージを骨等価軟組織イメージに置き換え、一方、骨材料によって生成されたX線吸収イメージは、ピクセル単位で骨等価軟組織材料によって予測可能に生成されたX線吸収イメージに置き換える。(2)元々分解された骨イメージのある正確な幾何学的位置において、骨等価軟組織イメージを元々分解された軟組織イメージに再び設置する。
投影イメージの中に骨組織が重なっている場合など、骨イメージの中から軟部組織イメージを除去する場合には、上記と逆のことを行ってもよい。
互いに重なり合うコンポーネントが多い場合、例えば、1つの血管、1つの骨組織、1つの神経組織と重なり合う軟組織を可視化する場合、血管のイメージと骨組織のイメージと神経組織のイメージを導き出し、デュアルエネルギーシステムと同様の処理を用いて、次のようにしてもよい。(1)3つの組織のそれぞれを、同じ幾何学的条件が維持されるように、その等価な軟部組織で置き換えつつ、組織材料のそれぞれによって生成されるX線吸収イメージを、ピクセル単位で、特定の対応する組織と同等の軟部組織材料のそれぞれによって予測可能に生成されるX線吸収イメージで置き換える。
(2)元々分解された個々の組織、例えば骨、血管、神経組織イメージのそれぞれが位置する正確な幾何学的位置に、それぞれの組織に相当する軟組織イメージを元々分解された軟組織イメージに再インストールする。
しばしば、複数の異なる種類の組織が重なっている場合、例えば、撮影されたオリジナルの各イメージに基づいて、解剖学的マーカーと他と比較した各コンポーネントの幾何学的位置、位置および場所が、元の測定値とイメージに基づく材料分解の前に近似されるかもしれない。さらに、類似の解剖学的または身体部分または対象に構築された参照データベースに基づいて、他の仮定がなされるかもしれない。
例えば、選択された領域の3次元イメージが導出されてもよく、したがって、第3軸に埋め込まれた情報は、選択された領域について得られてもよい。人体は、ほとんどの組織、又は器官についてゆっくりと変化するので、組織の層又は異なる組織の層の厚さ及び幾何学的位置及び位置は、3次元分解された領域を囲む領域又は地域について得られてもよい。例として、互いに分散した1つ以上の選択された領域は、対象物全体の様々な組織又は構成要素の幾何学的位置又は相対的位置及び分布に関する情報を提供するために使用されてもよい。
場合によっては、このような3D測定の各々は、対象への放射線を低減し、時間を節約するために、できるだけ小さな領域に限定される。
さらに、関心領域の2Dまたは3D形式での2重または3重または複数のエネルギー測定は、このような導出を補足することができる。
異物が十分に定義されている場合、それがある環境を歪めるか妨害するかユーザーを誤解させない限り、視覚的な提示と使いやすさのために予測値に基づくか予測値の増幅に基づくかのいずれかのシミュレーション測定は、色の選択、およびROI動作の残りの部分を妨害しないように信号を比例または不釣り合いに増幅するか信号を完全に除去するなどの異なる形式の表現で表すことが可能である。
例えば、基準物体以外に、胸骨は、特に心臓追跡や肺の研究、及び造影剤としてのカルシウムの使用、又は腫瘍や疫病のカルシウムスコアリングや微小石灰化の評価のために、提示するために測定した信号の干渉である可能性がある。胸骨のデータは取り出して捨てるか、その一部を解剖学的マーカーで基準オブジェクトとして確保し、可視化およびガイドと定量化される関心物質をよりよく位置づけることができる。
重複する組織がある場合の本明細書に開示されるX線イメージ方法は、以下の手順を含むことができる。
(A)2つのコンポーネント以上の材料分解のためのデュアルエネルギーまたは複数のイメージデータ取得を行う手順、(B)デュアルエネルギーおよびスペクトルイメージデータ分解を行う手順、(C)軟組織内の骨除去された空隙または重なり合った組織内の複数の個別組織が除去された空隙による干渉を補償するための手順。
以下は、デュアルエネルギー法の例であり、より良い可視化と定量化のために、複数のコンポーネントイメージとイメージの分離と表示のためのマルチエネルギー方式に拡張されるかもしれない。
(A)デュアルエネルギーイメージデータ取得を行うための手順。X線源は高エネルギーX線パルスを放出し、その間に検出器は高エネルギーでイメージデータ取得を行い、次に、X線源は低エネルギーX線パルスを放出し、その間に検出器は低エネルギーでイメージデータ取得を行う。従来の検出器を使用した場合、取得したイメージデータはそのまま手順(B)に使用される。散乱除去機能付き検出器を使用する場合は、前方検出器と後方検出器の両方でデータ取得を行う。このとき、前方検出器からのイメージデータは、ここに説明するようなデータ処理によって、手順(B)のために送信される。
(B)デュアルエネルギーイメージデータ分解を行うための手順。本開示で提供されるような任意のデュアルエナジーデータ評価方法を使用することができる。説明のために、2つの例を簡単に説明する。ただし、手順(A)は、これらの方法に限定されない。
(a)散乱干渉を徹底的に除去し、包括的なデュアルエネルギー方程式を直接解くことに基づくデュアルエネルギーデータ分解方法。散乱の除去とデュアルエネルギー分解の実行は、特別に設計された3層X線検出器アセンブリを使用することにより、単一の首尾一貫したプロセスに不可分に結合されている。以下に、このシステムの動作の概要を示す。
X線検出器は、前方(第1層)検出器としての高分解能X線検出器、X線ビームセレクタ(第2層)、および後方(第3層)検出器としての低分解能X線検出器を含むことができる。ビームセレクタは、散乱X線のみ、または散乱のない直接透過X線のみのどちらか1種類のX線のみを透過させ、後方検出器で受光することが可能である。もう一方のタイプのX線は、後方検出器に対して実質的に遮断される。デュアルエネルギーイメージデータ取得の結果、前方検出器では直接透過X線(X線源から放出され直線に厳密に沿って対象を透過する)とランダム散乱X線の両方を含む高解像度X線イメージのペアを取得し、後方検出器では一種類のX線(透過のみ、または散乱のみ)のみによって与えられる低解像度イメージのペアを取得することができる。
後方検出器で得られたイメージペアを処理することにより、前方検出器での散乱X線に関する情報が正確に予測されるので、前方検出器(高分解能検出器)において、高いエネルギーEHのX線と低いエネルギーELのX線について、散乱干渉のない直接透過X線のイメージデータセットペアが正確に得られ、このペアは、高エネルギーと低いエネルギーのX線について、後方検出器で得られ、このペアは、高エネルギーと低いエネルギーのX線についてのイメージデータセットである。
さらに、高エネルギーEHと低エネルギーELで得られた前方検出器上の高解像度イメージペアに基づき、デュアルエネルギーデータ分解法を用いて、一対の材料組成イメージ(骨イメージと画像軟組織イメージ)を得る。本明細書に開示される1つのデュアルエネルギーデータ分解方法は、いかなる簡略化した仮定またはいかなる簡略化した近似にも頼ることなく、非線形デュアルエネルギー方程式系の直接解に基づくことができる。重要な簡略化近似が行われないので、重要な散乱干渉はなく、解は最も正確な結果を提供する能力を有するはずである。
一方、ある種の単純化した仮定、およびある種の単純化した近似を用いたデュアルエネルギー方程式の解法は数多く存在する。また、真のイメージデータには、散乱干渉が異なるレベルで混在することがある。その結果、結果の精度はさまざまに劣化する。これらの単純化された近似の共通の特徴は、以下を含むことができる。(i)散乱干渉を除去しない。(ii)非線形デュアルエネルギー方程式を解くために、十分に文献化された線形近似または非線形補正を伴う線形近似を使用する。簡略化近似法の具体的な形態は、多数あり得るが、本開示は、任意の正当な簡略化または近似の使用を制限するものではなく、これらの類似の方法のすべてを熟慮するものである。例示として、デュアルエネルギー方程式を解くための散乱耐性、線形化が以下に記載される。
(b)散乱に耐性のある、線形化法。第一の近似仮定は、イメージ信号に対する散乱干渉の寄与を無視することである。第二の近似仮定は、対象の非線形吸収効果をすべて無視でき、X線源はスペクトル分布のない単一のエネルギー値のみを持つX線を放射することである。これらの近似の下で、非線形デュアルエネルギー方程式系は、各点(x,y)に対してピクセルごとに2つの線形連立代数方程式を解く任意の標準的な方法によって求めることができる一対の単純な量b(x,y)、s(x,y)を与えて線形化することが可能である。線形化手法は、非線形化手法に比べて実装が容易である。より精度の高い定量的な結果が必要な場合には、本明細書の開示に基づく非線形効果に対する更なる補正を行うことができる。
(C)軟組織内の骨除去された空隙により新たに生じる干渉効果を補償する手順。手順(B)の結果、軟組織イメージに直接課せられた強い骨吸収イメージが除去される。従って、軟組織に含まれ、骨によってマスクされた所望のイメージ情報の視覚的な識別がさらに著しく容易にされる。しかし、骨の存在と除去に関連した別の形の干渉が存在する可能性がある:元々骨によって占められた空の空間は、今や軟組織の空洞イメージを与える。この空洞イメージは、好ましくない背景パターンの役割を果たし、軟組織に含まれる情報をさらに視覚的に識別することを妨げている。手順(B)の目的は、胸壁軟部組織イメージの中で、骨を取り除いた空洞を補正することである。補償技術は、2つのステップを含むことができる。(i)元々分解された骨イメージを、骨と幾何学的に同一であるが、物理的に全てのX線吸収属性組織イメージを保有する骨等価軟組織イメージに、元々分解された骨イメージがあった正確な幾何学的位置で、元々分解された軟組織イメージに変換するステップ。
手順(C)により、軟組織への骨の重なりによる干渉を除去することができる。
軟組織に含まれる隠れた情報をさらに視覚的に識別するために、コントラスト/明るさの変化やイメージサブトラクション法などの他の標準的なイメージング処理技術をさらに使用することが可能である。
上述した主要な補償処置にオプションとして、結果として得られる軟組織の均一性をさらに向上させることができるある種の方法が存在する。
これらの方法は、高次近似に属する。例えば、生理的特徴によれば、胸壁の骨相当軟部組織イメージは、非常に滑らかで緩やかに変化する空間分布を有することが望ましい。このとき、(ii)のステップで乗算係数を用いるだけでは、局所欠損などの特定の骨内部構造や中空芯構造が骨相当軟組織イメージに持ち込まれ、内臓軟組織イメージを解析する際に不要な混乱を招く可能性がある。このような高次の影響をさらに排除するために、以下の方法を用いることができる。(a)特定の骨構造ごとに、もともと得られた骨イメージを所望の滑らかな形状にわずかに修正する。したがって、ステップ(B)(i)、および(B)(ii)では、実際の骨イメージの代わりに、わずかに修正された骨イメージが使用される。(b)イメージ処理技術における標準的なイメージ平滑化、対象境界検出方法などを用いて、骨相当軟組織イメージの構築に適した骨イメージを提供することができる。これら及び他の全ての高次改善方法は、本開示によって熟慮される。
本開示は、2つ以上のコンポーネントを含む対象または複数のコンポーネントにさらに及ぶ。少なくとも1つの材料又は物質、すなわち第1のコンポーネント又は第1の物質が他の部分から分離される場合、軟組織の可視化のために骨が軟組織に置き換えられる場合のように、複合体又は第1のコンポーネント以外のコンポーネントによって占められる空間は、より良い可視化のために第1の材料の複合体同等物によって置き換えられてもよい。
<コントローラー>
図37は、X線イメージシステム内の制御ユニットを示す図である。
図37は、X線イメージシステム内の制御ユニットを示す図である。
モータ、X線コリメータ、発電機、検出器などの電子機器駆動ハードウエアの一部または全部に接続される制御ユニット200は、CPUまたはマイクロプロセッサ、または埋め込み回路およびファームウエアを備え、各ハードウエアの動作および/またはオンとオフを制御することが可能である。
コントローラー200は、有線接続または無線ネットワーク、イーサネット、またはBluetoothなどの無線接続で、タッチスクリーンなどのディスプレイパネル、またはハンドヘルドディスプレイを有することができるコントローラー1200に接続してもよく、ジョイスティックまたはコンピュータ入力デバイス、異なるマイクロプロセッサの電力コントローラーに接続してもよい。
いくつかの場合において、制御ユニット200は、コントローラー1200と統合される。
コントローラー1200は、検出器又はX線源を動かすために使用されるモータを動かすため、及び/又はコリメータの操作及び/又はイメージするために関心のある体積を選択するため、及び/又は測定を行うためにセンサーと対話するために、カメラのように3Dイメージを取るため、又はユーザー又はコンピュータによって与えられる基準に基づいて自動測定決定を行うためにX線管、患者、検出器などのオブジェクトの距離及び幾何学的な測定を行うために使用されてもよい。
物理的に制御ユニット200または200と1200の統合制御ユニットは、構造的支持体104と一体化するか、またはX線源用のスタンドまたはX線システム用の支持構造の一部と取り付けてもよく、または検出器アセンブリ109と分離してもよく、またはX線源アセンブリと分離してもよく、または単独ユニットであってもよく、またはX線システムの一部と一体化してもよい。
コントローラー200又はコントローラー1200のいずれかが、LEDディスプレイ又は表示パネルを備えてもよい。表示パネルは、移動の指示を表示してもよいし、イメージ対象2及び/又はイメージ対象上のROI領域又はコンピュータが選択したROI領域のイメージを有してもよい。ユーザーは、ディスプレイ内のイメージ化された対象の部分をタップしてもよい。X線源アセンブリ12だけでなく、検出器22アセンブリ又は23は、選択されたROIをイメージするためにほぼ最適化された空間位置になるように位置決めすることができる。
ROIの選択又はイメージ、及びX線源と検出器の位置合わせは、決定又は予め決められてワークステーション又はコントローラー1200又は制御ユニット200に保存されている基準に基づいて自動的に達成されてもよい。
コントローラユニット1200は、無線機構又は有線接続を介して、ディスプレイ1015の機能を有する又は有しないワークステーション1010又はラップトップ又はマイクロプロセッサと通信してもよい。
コントローラユニット200及び/又はワークステーション1010は、X線管及び検出器などのイメージング装置の一部及びイメージされる対象とは異なる場所に配置されてもよい。
コントローラユニット200は、検出器又はX線などのX線装置の一部を移動させるためにユーザーによって使用されてもよい。ユーザーは、コリメータ又はX線源によるイメージ対象上のLED光マークの直接観察に基づいて、又はセンシング要素によって与えられる情報によって、移動の決定を行うことができる。
本明細書に開示されるX線システムは、アクセサリ及び周辺装置を含んでもよい。
X線照射中または全体的な時間においてリアルタイムでイメージ対象および他の対象の線量および可能な被曝を監視するために、線量計がコリメータまたは構造体の任意の場所に取り付けられてもよい。そして、線量計を制御する電子機器、データ管理及び/又は測定値の分析は、マイクロプロセッサによって、及び/又はX線システムの他の構成要素を制御するために使用されX線システムにローカルなマイクロプロセッサ、又はリモートでマイクロプロセッサによって、線量計にローカルに行われてもよい。線量計とマイクロプロセッサのいずれか1つとの間の通信方法は、有線またはUSB、またはケーブル、またはWIFIまたは青歯または光学またはRFまたは通信およびデータ転送に用いられる他の無線方法を介してであってもよい。
本明細書に開示されるX線システムは、自動露出制御を含むことができる。
場合によっては、複数のイベント検出器をイメージセンサのチップ上に互いに相対的に配備することができる。特に、イメージセンサとしてアクティブピクセルセンサ(「APS」)デバイスを使用することができる。したがって、イベント検出器は、APSセンサーの同じチップ上で、好ましくはその中のアクティブピクセル配列に対して周辺位置に配置される追加のフォトサイトピクセルで作られる。
検出器は、ROIの下流に配置されてもよい。
光学的測定及びイメージング装置方法、内視鏡、MRI装置、磁性粒子イメージング、超音波、熱イメージ及び電気生理は、造影剤、解剖学的マーカー、または電気生理装置におけるカテーテルまたはプローブなどの識別子、マイクロマニピュレータなどの識別可能な対象の参照またはコロケーションによって本開示に統合されてもよい。半導体部品、光学システムの部品、または物理的もしくは化学的特性測定システムの部品、または1つ以上の内部部品またはマーカー、または1つ以上の空間的に外部のマーカーまたは参照オブジェクトの位置に対するサンプルまたは対象の摂動または参照が可能な治療デバイスおよびエネルギーデバイスの1つ以上の部品、そのようなマーカーまたは参照。ソフトウェアまたはデジタル自動化プログラムを制御するユーザーは、コロケーションを確立するために必要な測定、またはマイクロプロセッサに入力することができる既存のデータまたは測定値を使用することができ、測定値は、そのような相対的空間位置の計算に使用するためにメモリデバイスに格納される。
飛行時間センサー、センサー、又はカメラ若しくはビデオカメラなどの少なくとも1つのセンサーは、いくつかの例では、NIR光源などの暗視機能を備え、選択された関心領域又は関心領域内の基準物体、又は関心領域の外部にある選択領域又はマーカーを位置付けることができる。様々なモダリティによって測定された関心領域又は選択領域とマーカーの相対的な空間的位置は、関心領域、対象、及び測定視野内の構成要素及び選択物体を空間的に位置づけるために使用されてもよい。
1つ以上のセンサーは、厚さ、またはモーショントラッキング、空間位置及び/または向き、または幾何学的または寸法測定のために使用されてもよい。さらに、Alは、モーショントラッキング、人間の顔または体の部分およびポーズ認識、例えば、追跡するための顔検出、顔メッシュ、アイリス、手、ポーズ、ヘッドセグメンテーション、使用する物体検出、ボックストラッキング、およびインスタントモーショントラッキング、オブジェクトロン(3D物体検出)、KNIFT(テンプレートベースの特徴マッチング)などに使用されても良い。
オートフリップ(AutoFlip)(Saliencyを考慮したビデオクロッピング)。
Alは、例えば、形状及び幾何学、1つ又は複数の関心領域の空間的相対位置、各関心領域の表面色、及び/又は物体の形状を組み合わせて、デジタル的に選択することによって、関心領域及び体積を、ある時はリアルタイムで特定し、又はユーザーが視覚化するのを助け、X線測定又はイメージング用の、及び/又はリアルタイムX線イメージング及び測定用の関心体積、又は関心領域の1又は複数の基準に基づいて手動又はデジタル選択を可能にするために使用されてもよい。関心領域が選択された後、コントローラーは、関心領域をイメージするためにX線管及び/又は対応する検出器を移動させるためのコマンドを、例えば併進ステージなどのモーションシステムに送信する。併進ステージは、時間的に少なくとも1軸から6軸で移動可能であってもよい。
X線源と検出器のペアは、従来のX線システム、Cアーム、Uアーム、アップライト等と同様のX線イメージングシステムに搭載することができる。例えば放出位置は、電子磁気操向器、または移動体、Uアーム、天井マウント併進ステージと同じ、または別の移動体は、2D、スペクトル、または断層撮影、3D、時間的に6Dと7Dまで、多次元イメージングで、または上記のすべての組み合わせは、Al機能付きカメラまたはビデオカメラによって選択した関心領域について訴求することができるX線源を移動することができる。場合によっては、6D又は7D測定を補助するためにマーカーが使用され、又は少なくとも2つのカメラ又はイメージセンサが使用されてもよい。
X線イメージングの前に、ユーザーが関心体積の選択に介入又は確認することができる。
VOIの自動選択又は動作追跡は、例えば、動作中の膝又は脊椎の動きを調べることによって、デジタル的に自動化されたX線測定を直列にトリガーすることができる。
カメラによるAIモーショントラッキングとX線イメージングとの組み合わせでは、2つのモダリティのそれぞれからのイメージが時間的に同期され、X線を身体または組織の運動機能の特性評価に使用し、従来よりもはるかに精密にROIまたはVOIを位置付ける一方で、放射線量を低減することができる場合がある。
X線測定と併設された光学カメラにおけるAIの使用の組み合わせは、光学カメラがX線カメラよりはるかに高速である場合など、測定の精度および正確さ、身体部分および関連する運動の特性評価の完了を高め、同時にX線被曝を低減する可能性がある。
カメラ測定とX線測定の融合は、イメージを見る人にとって、より視覚的に親しみやすいものにすることもできる。AIは、各モダリティによって撮影された測定及びイメージの連続性及びコロケーションを形成するために、そのような測定を融合させるために使用されてもよい。
コロケーションされた物体又は対象又は関心領域又は関心体積のイメージの提示は、外部用のカメラキャプチャイメージ及びX線を使用する内部体積測定用のカメラキャプチャイメージの両方を使用して、実生活の提示を有するように融合され得る。異なるカラースキームを異なるデータセットに適用して、異なるコンポーネント、物体、関心領域のセグメント、材料分解物質、抽出されたイメージデータ、空間的・時間的に完全な測定に基づいて合成されたデータのサブセットを表現することができる。
ロボットや自動車、自動車部品などのモータ駆動される機械物体の非破壊検査にも、同様の方法・装置を用いることができる。
<表示装置と入力装置>
ジョイスティックは、例えば、イメージングされる対象に向けられる検出器及び/又はX線管を相対的に位置決めするために、イメージング用動作システムの局所的制御のための入力デバイスとして使用されてもよい。
ジョイスティックは、例えば、イメージングされる対象に向けられる検出器及び/又はX線管を相対的に位置決めするために、イメージング用動作システムの局所的制御のための入力デバイスとして使用されてもよい。
電子コントローラー又はマイクロプロセッサは、ディスプレイパネルボックスと配線され、及び/又はディスプレイパネルボックスの中にあってもよい。ディスプレイボックス又はディスプレイパネル又は、イメージングシステム又はイメージングシステムのサブモジュールをイメージングされた対象に対して相対的に位置決めするための機構を有していてもよい。このようなディスプレイパネル又はディスプレイボックスは、タッチスクリーンであってもよい。
ワークステーション又はマイクロプロセッサ及び取得及び/又は閲覧アプリケーションが存在するディスプレイセットとは別に、システムを遮断するためのイメージングシステムに局在する緊急ボタンが存在してもよい。
Ipad又は他の電子タブレット装置が、表示システムとして使用されてもよい。
コントローラーは、マイクまたはスピーカーに接続されてもよい。また、アンプを使用する場合もある。
サウンドアラームが、システムの故障、サブモジュールの故障、放射線量が多すぎる、イメージが正しく撮影されない、システムが機能していない、患者やユーザーの安全を警告する、あるいはシステムやサブモジュールがアクセス認証なしに開放されたことを警告するためのシステムの一部であってもよい。
実行された各ソフトウェア活動又はハードウェア機能は、ログに記録されてもよい。このようなログは、診断または保守または監視または別の場所や時間での遠隔監視のためのレポートとして提示されることがある。
安全関連の問題又はハードウェア故障若しくは誤動作又はソフトウェアエラーの警告のための黄色灯、及びX線システムを損傷する可能性がある又は患者若しくはユーザーの安全が危険にさらされる可能性がある致命的な故障又は誤動作のための赤色表示器などの、エスカレーション警告システムが含まれることがある。
検知要素は、様々なハードウェア要素、X線イメージングにおけるサブモジュール、及びコントローラー並びに表示及び制御ユニットの距離、幾何学、又は相対的な空間位置を検知するために使用することができる。
X線源の焦点サイズを小さくするために、テーパーコリメータが使用されることがある。大きな視野を有するX線断層撮影システムは、X線源焦点スポットサイズの縮小のためにテーパーコリメータを使用することができる。テーパーコリメータをX線管ハウジングまたはX線管の下に取り付けられた別のコリメータに取り付けるために、モータおよびアタッチメントが使用される場合がある。
アタッチメントハードウェアは、テーパーコリメータを線源とVOIとの間の経路ラインに出し入れするために、移動機又はロボットアームによってモータ駆動又は調整されてもよい。
テーパーコリメータは、焦点スポットサイズを縮小するために使用されてもよい。
テーパーコリメータは、関心領域を制限するために使用されることができる。
テーパーコリメータは、露光時間を調整するための開口部を開閉できるシャッターに似たデザインの従来のコリメータとして使用することができる。
場合によっては、テーパーコリメータは、ビーム減衰器の層を積層し、各層がその上の層よりもわずかに大きな開口を有し、透過用のテーパー穴を形成することもできる。
検知要素は、X線管用移動体に取り付けられてもよいし、X線管12及び/又は検出器22及び/又は保持構造104又は移動体とは別の空間位置に配置されてもよいし、X線源12又は検出器22のいずれかを含むサブモジュールや、イメージング対象2をイメージングするために検出器22、ビーム粒子ストッパー又はビーム粒子ストッパープレート100又はビームセレクタ又は1つ以上の他の検出器を含む検出モジュールは、X線管に取り付けられてもよい。
検知要素は、光学センサー又は飛行時間センサー又はカメラ又はlidar装置であってよく、X線源及び検出器に対する寸法又は幾何学的又は空間的位置、並びにVOI又はROI又はイメージング対象物の厚さを測定してよい。厚さの測定は、投与量又は露光時間を決定し、それによってコリメータシャッターを制御し、又はVOI又はROIに対するX線源及び/若しくは検出器の位置合わせを行い、又はVOIの3Dイメージの完全再構成に必要な投影イメージ若しくは測定値の数を決定するために使用されてもよい。
いくつかの場合において、超音波装置は、ROIが存在するイメージ対象内の関心領域を決定するために使用されてもよい。例えば、衣服を含むことができる全体の厚みについて必要なイメージ数を決定する代わりに、イメージ対象としての人体の厚みを超音波測定から抽出し、撮影するイメージの数をさらに減少させることができる。例えば、患者が着用する医療用ガウンは、既に所定の空間容積とX線測定特性を有しているので、医療用ガウンに関わる層については、追加のX線イメージを撮影する必要がない。
<音声指令およびインタラクション>
本明細書に開示されたX線イメージングシステムは、ユーザー、及び/又は患者、及び/又はマイクロプロセッサとの通信及び相互作用並びに制御及びフィードバックシステムのための音声認識システム及び/又はコンピュータ生成音声通信システムと統合されてもよい。
本明細書に開示されたX線イメージングシステムは、ユーザー、及び/又は患者、及び/又はマイクロプロセッサとの通信及び相互作用並びに制御及びフィードバックシステムのための音声認識システム及び/又はコンピュータ生成音声通信システムと統合されてもよい。
<バーチャルリアリティとハードウェア>
本明細書に開示されるX線イメージングシステムは、X線測定から抽出されたX線イメージを、場合によってはリアルタイムで、従来のイメージングシステムと比較して大幅に低減された又は最小限のイメージ処理で見るために、バーチャルリアリティビューア又はバーチャルリアリティアイウェアを使用することができる。
本明細書に開示されるX線イメージングシステムは、X線測定から抽出されたX線イメージを、場合によってはリアルタイムで、従来のイメージングシステムと比較して大幅に低減された又は最小限のイメージ処理で見るために、バーチャルリアリティビューア又はバーチャルリアリティアイウェアを使用することができる。
バーチャルリアリティイメージは、バーチャルリアリティビューア及び/又はバーチャルリアリティアイウェア、カメラビューアを備えたバーチャルリアリティヘッドマウント、特にCTからの断層撮影イメージのために構築することができ、これはイメージング経験を完了するためにスティッチング及び/又は補間を必要とする場合がある。ズームインやズームアウトなどの機能は、見る前にイメージ処理する必要がある。一般的に3Dビューイングは、ナビゲーションソフトウェアを使用しない限り、現在のポータブルCTやCTシステムでリアルタイムに行うことはできない。そして、ソフトウェアによる支援では、閲覧される情報は十分に正確でない場合があり、又はアーチファクトを伴う場合がある。
本開示により、例えばヘッドマウント及びアイピースを有するバーチャルリアリティビューアは、最小限のイメージ処理で統合され、リアルタイムで提示されることができる。
リアルタイムビューが必要とされないシナリオでは、X線測定及びイメージングシステムによって取得されたイメージデータは、本開示で説明したような再構成による直接3Dビューを可能にするが、従来のCT又はトモシンセシスイメージで必要な、ソフトウェアイメージ操作及びデータギャップ充填、並びにより大きなアーチファクト及びノイズ補正が大幅に低減されている。
人間のクリニックで使用される医療用CTシステムでは、一般に、解像度は、例えば、検出器に垂直なX線ビームの中心軸に沿った厚さ、厚さの軸に沿って最大で100umであるのが現状である。より高い解像度は、例えば数千枚以上の撮影が必要な多数のイメージ、及び任意のより高い解像度に達するために必要になる対象の放射線被曝量のために、実際上不可能である場合がある。
しかしながら、本開示で説明する3D技術は、選択されたVOIをxy方向でサブミリメートル範囲と同じくらい小さくすることを可能にし得る。さらに、高いスペクトル分解能、または同じVOIを照会するために使用され得る複数のエネルギーの実現可能性は、測定の感度を増加させることができる。小さな断面でのイメージング枚数が多い場合、総放射線量を許容し、マイクロメートル領域、あるいはマイクロメートル領域よりも小さな領域までイメージングできる可能性がある。これにより、小さな血液毛細血管や非常に小さな寸法の物質のイメージングが可能となり、診断、監視、追跡能力を向上させ、マイクロメートル領域またはサブマイクロ領域の小さな特徴へのズームなどの機能を表示することができる可能性がある。バーチャルリアリティビューアを使用した、または使用しない小さな特徴の測定は、実装されてもよい。場合によっては、そのような実装は、断層撮影再構成後に追加のソフトウェア処理を必要としないかもしれない。
<メモリや演算装置および方法>
3D、CT演算、X線測定などでは、大容量のメモリと演算が必要となる場合がある。ここで説明するnマトリックス方法及び装置では、無線通信又はテザー機構を介して既存の検出器又は検出器に取り付けられた検出器モジュール又はアセンブリ又はサブモジュールは、メモリストレージ、及び/又はデータベース機能及び/又はデータベースと、局所的な演算・処理・保存用のマイクロプロセッサとを含む場合がある。表示は、ローカルに、またはマイクロプロセッサから直接行ってもよいし、無線またはイーサネットまたは他のテザー通信方法を介して、表示用および場合によってはさらなる計算および保存用の第2のマイクロプロセッサに遠隔で行ってもよい。
3D、CT演算、X線測定などでは、大容量のメモリと演算が必要となる場合がある。ここで説明するnマトリックス方法及び装置では、無線通信又はテザー機構を介して既存の検出器又は検出器に取り付けられた検出器モジュール又はアセンブリ又はサブモジュールは、メモリストレージ、及び/又はデータベース機能及び/又はデータベースと、局所的な演算・処理・保存用のマイクロプロセッサとを含む場合がある。表示は、ローカルに、またはマイクロプロセッサから直接行ってもよいし、無線またはイーサネットまたは他のテザー通信方法を介して、表示用および場合によってはさらなる計算および保存用の第2のマイクロプロセッサに遠隔で行ってもよい。
検出器用の32ビット以上のADC変換とそのダイナミックレンジは、イメージ処理に使用されてもよく、高いダイナミックレンジが有用な2Dイメージの取得、処理、および多次元アプリケーションに有用である。
マイクロプロセッサまたはメモリまたはデータベースの保存および管理は、32ビット以上のADC分解能を有するローカルであってもよく、図29に示されるようなイメージ処理、取得制御およびX線イメージング装置および方法のAIに使用されてもよい。
デュアル以上のエネルギーレベルを有する断層撮影及び/又はスペクトルイメージング、並びにイメージガイダンス及びトラッキングアプリケーションは、上記の構成に適していることができる。
局所メモリ及びマイクロプロセッサの能力は、散乱除去装置及び/又は方法、又は一次干渉よりも1%少ない散乱を有する散乱除去又はX線イメージと共に使用され得る。
局所メモリ及びマイクロプロセッサの能力は、心臓血管又は肺のイメージング、動的灌流イメージング又はおよそ全身アプリケーションのような2つ以上の器官のX線イメージングと共に使用されてもよい。
局所メモリとマイクロプロセッサの能力は、12-16ビットまたは32ビット以上のADC解像度を持つものであって、産業用アプリケーションで使用されてもよい。
<光学的イメージングアセンブリ>
デュアル又はマルチエネルギー2D及び3Dイメージング、又はnマトリックス法を用いた3Dイメージング、又は散乱除去法、又は上記の方法の1つ以上の組み合わせのために、対象の関心領域から下流のX線検出器を用いる代わりに、インテンシファイア、又はシンチレーション、光学部品、及び光学カメラを含むセンシングアセンブリが使用されてもよい。
デュアル又はマルチエネルギー2D及び3Dイメージング、又はnマトリックス法を用いた3Dイメージング、又は散乱除去法、又は上記の方法の1つ以上の組み合わせのために、対象の関心領域から下流のX線検出器を用いる代わりに、インテンシファイア、又はシンチレーション、光学部品、及び光学カメラを含むセンシングアセンブリが使用されてもよい。
大型のX線センサーは、速度、解像度、性能に限界があるため、小型の光学センサーを使用して、大きな関心領域を撮影することができる。
例えば、シンチレータ又は増幅器が、X線源に対して関心領域より下流に配置される場合、シンチレータ又は増幅器は、X線を光信号に変換することができる。センシングアセンブリは、増幅器から光学センサーにイメージをフォーカスするための光学レンズまたは対物レンズのようなオプティクスを含むことができる。
光学レンズは、ダブレットであるか、複数のレンズを含むことができる。光学レンズは、増幅器の1つ以上の領域から来る光学光を可視化するために、ズームインまたはズームアウトするように自動的に調整されることがある。
増幅器で形成されたイメージとセンサーの検出面との間の距離を縮めるために、傾斜した(例えば、45度の)ミラーが使用されてもよい。センサーは2次元光学センサーであってもよい。
ネガレンズは、増幅器によって収集されたX線イメージから変換された光学イメージを、検出アセンブリの入力アパーチャにさらに集束させるために使用されてもよい。
2つ以上のそのようなセンシングアセンブリが、VOIが投影イメージを有する増幅器上の関心領域に使用または移動されてもよい。このようなセンシングアセンブリは、サイズまたはフレームレートまたはエネルギー感度が互いに異なっていてもよい。
入力アパーチャ及びセンサイメージ平面が、VOIを照射するX線により増幅器によって形成されたイメージを捕捉し得るように、各アセンブリを配置するために移動体が使用され、増幅器上に投影される。あるいは、対物タレットは、関心領域または関心体積からX線信号を収集するために、2つ以上の光学アセンブリを配置するために使用されてもよい。
いくつかの場合、適切なサイズの増幅器は、光学センシングアセンブリの入力開口部に結合されてもよい。
そして、そのようなアセンブリは、関心領域をイメージするために、増幅器とともに移動されるか、増幅器に対して相対的に移動することができる。
<X線ビームチョッパー>
ビームチョッパーは、1つ又は複数の分散したROIを照射するために用いられてもよく、又は1つ又は複数の空間的位置でROIを追跡するために用いられてもよい。目的は以下のうちの1つであってよい。
ビームチョッパーは、1つ又は複数の分散したROIを照射するために用いられてもよく、又は1つ又は複数の空間的位置でROIを追跡するために用いられてもよい。目的は以下のうちの1つであってよい。
放射線を減らす、例えば、チョッパーは、分散した複数穴を持つコリメータで作られてもよい、これは放射線を減らすか、またはエネルギーレベルを減らすためにROIまたはフィルタの構造照明を生成してもよい、例えば、骨だけをイメージするために軟組織敏感な低エネルギーX線をフィルタリングするために。
ビーム経路内外で1つ以上のモータ駆動テーパーコリメータを使用して、例えば線源の焦点スポットサイズを小さくする。
放射線照射時間を短縮する、例えば、1つ以上のX線放出位置での放射線照射時間を短縮する。
より短いX線パルスは、X線ビームチョッパーを使用して生成可能である。X線源からの電子信号に回転を同期させて位相ロックし、光ビームで監視することができる、質量と慣性モーメントが小さく、高速で経済的でコンパクトなX線ビームチョッパーが開示されている。2.5マイクロ秒より短いX線バーストを3ナノ秒以下のジッタ(jitter)時間で発生させることができる。
線源から発せられるX線ビームをチョッピングするための装置は、回転ディスクを含み得、前記ディスクは、線源が脈動している前記ディスクの直径に沿って延びるチャンネルを定義し、前記回転ディスク上の前記チャンネルの角度位置は、前記脈動線源に位相ロックされ得、チャンネルの回転速度の1回転に要する時間の変動は5ppm未満であってよい。
X線ビームをチョッピングするための装置は、第1側及び第2側を有する回転ディスクを含むことができ、前記ディスクは、ディスクの直径全体に沿って延びる通路を画定している。
X線ビームをチョッピングするためのデバイスは、以下を含むことができる。
前記ディスクの直径に沿って延び、前記ディスクのベース面に対して特定の高さに位置決めされたチャネルを有するディスク。
前記ディスクをモータに接続するシャフト。
前記モータに電力を供給するための第1の電気回路と、前記モータの速度を制御するための第2の電気回路。
前記ディスクに関連する速度を決定し、前記速度を前記第2の電気回路に伝達するための光センサー。
前記ディスクに入射するX線ビームであって、前記X線ビームが、特定の入射周波数で、前記ディスクの前記ベース部に対する前記チャネルの前記位置と一致する前記ディスク上の位置に入射する、X線ビーム入射束。
前記ディスクの直径に沿って延び、前記ディスクのベース面に対して特定の高さに位置決めされたチャネルを有するディスク。
前記ディスクをモータに接続するシャフト。
前記モータに電力を供給するための第1の電気回路と、前記モータの速度を制御するための第2の電気回路。
前記ディスクに関連する速度を決定し、前記速度を前記第2の電気回路に伝達するための光センサー。
前記ディスクに入射するX線ビームであって、前記X線ビームが、特定の入射周波数で、前記ディスクの前記ベース部に対する前記チャネルの前記位置と一致する前記ディスク上の位置に入射する、X線ビーム入射束。
X線ビームチョッパーは、コリメータまたはその直下に取り付けられてもよく、代わりにX線ビームチョッパーは、コリメータとX線放出位置との間にあってもよい。
マルチディスクチョッパーを使用することができる。各ディスクは、例えば、z軸方向の高解像度Xcのために、そのうちのいくつかは、元の焦点のサイズよりも小さいかもしれない、依存する異なる焦点を作成するために異なるスポットサイズを有するかもしれない。
X線ビームを生成するために、第1のセットの磁気要素は、第2のセットの磁気要素又は電磁要素によって作成された磁場中に電子ビームを輸送することができ、前記第2のセットの磁気要素又は電磁要素によって作成された磁場は、前記電子ビームに、第1のセットの電磁要素又は磁気要素の作成したX線放射位置と異なる位置においてX線ビームを生成させることができる。放出位置の移動は、3Dイメージング再構成のためである。あるいは、選択された関心領域を照射するための移動である。ターゲットが様々な材料を含む場合電子ビームは、異なるターゲット材料を含み得る異なるターゲット領域に移動することができ、X線源は、異なるエネルギーレベルのX線を生成し、複数のスペクトル測定において異なるエネルギーレベルのX線の迅速な切り替えを可能にすることができる。
場合によっては、回転ビームチョッパーは移動する必要がないかもしれない。
あるいは、透過性孔を有する回転ディスクをビームチョッパーとして用いてもよい。回転ディスクの中心軸は、コーンビームの中心と平行で横並びであることが好ましい。
このようなビームチョッパーは、かなり軽量であるため、持ち運びが可能である。
<クラウドコンピューティング>
X線イメージングシステム及び装置並びに方法に開示されたX線測定値の取得、分析、処理及び閲覧は、点、1D、又は2D、又は多次元又は3Dイメージ構築、イメージ処理及び/又はセグメント化及び/又は注釈、並びにプレゼンテーション及びAI並びに関連分析及びデータマイニング処理及び機能を生成するために使用することができる。処理は、測定現場の1つ以上のローカルコンピューティングデバイスまたはマイクロプロセッサのローカルワークステーションで、または1つ以上のクラウドロケーションまたはリモートサーバーで行われてもよい。
X線イメージングシステム及び装置並びに方法に開示されたX線測定値の取得、分析、処理及び閲覧は、点、1D、又は2D、又は多次元又は3Dイメージ構築、イメージ処理及び/又はセグメント化及び/又は注釈、並びにプレゼンテーション及びAI並びに関連分析及びデータマイニング処理及び機能を生成するために使用することができる。処理は、測定現場の1つ以上のローカルコンピューティングデバイスまたはマイクロプロセッサのローカルワークステーションで、または1つ以上のクラウドロケーションまたはリモートサーバーで行われてもよい。
ソフトウェアのエラー及びバグの更新及び修正は、X線イメージが取得され、及び/又は検出器の場所、及び/又はディスプレイ装置と接続されたマイクロプロセッサ、及び/又はリモートサーバー又はリモートプロセッサにおいてローカルで行われてもよい。
<ゲート測定>
造影剤を用いた遅延強化または多相イメージング、および他のモダリティで用いられる拡散またはゲート測定は、化学または電気、電磁気および他のエネルギー源による同様の外部変調を用いた本発明のX線測定と併用することができる。
造影剤を用いた遅延強化または多相イメージング、および他のモダリティで用いられる拡散またはゲート測定は、化学または電気、電磁気および他のエネルギー源による同様の外部変調を用いた本発明のX線測定と併用することができる。
<音響ノイズ>
背景からの音響ノイズ及び/又はX線装置及び関連モータからの音響ノイズを打ち消し、低減するために、1つ又は複数の音響キャンセリング材料を使用してシステムを遮蔽し、又は様々な場所に配置して音響ノイズを打ち消し、低減することができる。例えば、材料は、発泡体または発泡体内で分散されたナノ粒子またはナノチャネル、または自己組織化グラフェン発泡体を含むことができる。また、例として、リング状の構造を使用することも挙げられる。リングは、その厚みに沿って螺旋状のチャネルを含むことができる。
背景からの音響ノイズ及び/又はX線装置及び関連モータからの音響ノイズを打ち消し、低減するために、1つ又は複数の音響キャンセリング材料を使用してシステムを遮蔽し、又は様々な場所に配置して音響ノイズを打ち消し、低減することができる。例えば、材料は、発泡体または発泡体内で分散されたナノ粒子またはナノチャネル、または自己組織化グラフェン発泡体を含むことができる。また、例として、リング状の構造を使用することも挙げられる。リングは、その厚みに沿って螺旋状のチャネルを含むことができる。
能動的騒音制御は、騒音を低減またはキャンセルするために使用することができる。
音響ノイズ低減システムは、ノイズが事前またはリアルタイムで記録される開ループまたは閉ループシステムであり得る。ノイズ制御は、記録された音響ノイズ信号の主要周波数成分の位相を反転させることによって生成される合成逆位相信号を生成または注入するために使用することができる。この合成信号は、スキャナコンピュータが生成するトリガーを用いてスキャナ音と同期させ、パルスシーケンスと一致させることができる。
一実施例では、一対の圧電スピーカーを患者又はユーザーの近くに配置することができる。マルチチャンネル・フィルタリング-x最小平均二乗法(FXLMS)アルゴリズムを有する適応型コントローラーは、ノイズキャンセリング音響信号を生成するために使用することができる。
一実施例として、カスケード型ニューラルネットワークアーキテクチャを有するフィードバックコントローラシステムは、X線システム音響ノイズの低減を達成することができる。このシステムは、事前に記録されたノイズを提示するラウドスピーカーを使用してテストされた。
一例として、通信システムにおけるフィードフォワードANCシステムは、ノイズキャンセルのために光音響(すなわち、光信号によって駆動される圧電スピーカー)を利用することができる。
一例として、フィードフォワードループとフィードバックループの両方が組み込まれたハイブリッドコントローラが使用され得る。
<可搬性能>
現在のX線イメージングシステムは、チャートまたは車輪を押して移動することができるが、サイズに起因して、可搬性に限界がある。例えば、CTでは、寸法及びサイズが、3Dイメージング又はモータ駆動システムの利用可能性に対して、大きすぎる。
現在のX線イメージングシステムは、チャートまたは車輪を押して移動することができるが、サイズに起因して、可搬性に限界がある。例えば、CTでは、寸法及びサイズが、3Dイメージング又はモータ駆動システムの利用可能性に対して、大きすぎる。
従来の移動式X線、又は可搬式X線システム、又は車輪付きのX線システムは、ビームセレクタ又はビーム粒子ストッパーを用いる散乱除去方法、又は多次元イメージング性能、又はスペクトル又はデュアルエネルギーイメージング性能を有しないなど、本明細書に記載するように性能が限られている。
次に、可搬式または移動式および/または自律型または遠隔制御型のポータブルX線装置について説明する。
例は、図23及び図24に示される通りである。図23~24において、移動式X線マシン510は、自律的な自己移動または自己運転または遠隔制御が可能であってもよく、飛行機機構またはヘリコプター機構または宇宙船を介して空中を移動してもよく、または人間の運転手またはパイロットまたは宇宙飛行士によって制御されてもよい。
図23は、一人のユーザー又は複数のユーザーによって操縦可能なモータ駆動歯車であってもよいし、自走式装置であってもよいし、病院内又はクリニック外での移動のための遠隔制御ギアであってもよい、電動ギアに取り付けられた又は一体化したポータブルX線システム又はそのサブモジュールを示している。そのようなポータブルシステムは、単にユーザーによって手動で押されるだけであってもよい。このようなシステムは、CTシステム、又は一般X線システム、又はCT断層撮影、一般X線だけでなくパーソナライズされた精密CT撮影であるシステムを含んでもよい。
図24は、例えば、アクセサリ及びX線のサブモジュール又は1つ以上のトレーラー区画のような、追加のハードウェアの可搬性を許容するための追加の領域又はガントリーを含む可搬型X線システムを示す。
本明細書に開示されるX線イメージング装置及び方法は、X線システム400上に機械的又は磁気的に取り付けるか又は機械部品によってX線システムと統合するために遠隔制御移動システム500、又は自律駆動ロボット、又はモータ駆動ロボット又は移動用システムを用いることを含んでもよい。
X線システムは、例えば、X線システムに取り付けられた2つ以上の車輪505又は移動機構を有するなど、ポータビリティを可能にするポータブルシステムを含む。
可搬式X線イメージング装置及び方法は、説明したような時間的又は周波数的又は空間的方法などの散乱除去機能、及びスペクトル又はデュアルエネルギーイメージング機能を有するX線システム400を含んでもよい。
携帯型システムは、追加のコンパートメント502のための付加的な部屋を有していてもよいし、又は、発電機503又はディスプレイ502又はコンピュータ503又はX線システムに関連する又はその一部のハードウェアなど、X線システムに関連するアクセサリ又はサブモジュールのための追加のコンパートメントのための機械的アタッチメントを有することができ、
又は、発電機503又はディスプレイ502又はコンピュータ503又はX線システム又はその一部に関連するハードウェアなど、X線システムに関連するアクセサリ又はサブモジュールのための追加のコンパートメントのための機械的アタッチメントを有することができる。
携帯型システムは、追加のコンパートメント502のための付加的な部屋を有していてもよいし、又は、発電機503又はディスプレイ502又はコンピュータ503又はX線システムに関連する又はその一部のハードウェアなど、X線システムに関連するアクセサリ又はサブモジュールのための追加のコンパートメントのための機械的アタッチメントを有することができ、
又は、発電機503又はディスプレイ502又はコンピュータ503又はX線システム又はその一部に関連するハードウェアなど、X線システムに関連するアクセサリ又はサブモジュールのための追加のコンパートメントのための機械的アタッチメントを有することができる。
X線システムを有するそのようなモバイルシステム、又はポータブルシステム、又は自動運転又は遠隔制御システムは、コンパクトであってよく、標準的なドア又はエレベータ、又は患者のドア、又は手術室のドアを通って適合することができる。例えば、携帯型X線システムは、約35インチの幅及び6フィート8インチの高さにすることができる。
可搬型X線システムは、システムが格納されている部屋の外にいるユーザーによって遠隔制御されてもよく、又は部屋の中にいるユーザーAによって制御されてもよく、時には、かかるシステムは、エプロン又は鉛パネルを含むX線シールドで遮蔽されてもよい。このようなリードパネルは、取り外し可能であってもよいし、X線システムに取り付けられてもよい。
可搬型X線システムは、対象を撮影し、対象を位置決めするための1つ以上の位置センサー又は1つ以上のカメラを有していてもよい。
図25は、大視野X線システムで様々な身体部分又は組織又は器官を撮影するための装置602を示し、この装置は、人体全体を撮影することが可能であってもよい。装置602は、線源又は検出器を有するX線システムに取り付けられてもよいし、スタンドアローン装置であってもよい。そして、装置は、患者用椅子のような追加の支持装置上に置かれるか、又はそれに取り付けられてもよい。X線源12は、直立スタンド400に取り付けられる。複数の検出器22を含む検出器及び/又は検出器モジュールは、別のスタンド401に取り付けられてもよい。
図26aは、X線マンモグラフィ又は断層撮影又はCT断層撮影又は個人化又はカスタマイズ可能なCTの大視野又は複数目的を有するX線システムに取り付け又は取り外されたマンモグラフィ装置602の正面図である。
図26bは、スペクトル断層マンモグラフィ装置の側面図である。
図27は、3Dイメージング、CTまたはマンモグラフィ以外の領域のイメージングが可能なパーソナライズされカスタマイズされたCTシステム可能なX線システムに取り付けまたは取り外されたマンモグラフィサポート装置620の側面図である。
図37に示すようなコントローラユニット200にスピーカー及び/又はマイクロフォンが取り付けられてもよい。スピーカー又はマイクロフォンは、据え置き型X線装置又は可搬型X線装置に取り付けられてもよいし、X線装置の一部から分離されてもよい。このような装置は、特に患者及びX線システムがユーザー又はデジタル・コンピュータ・ワークステーションとは別の場所にある場合に、ユーザーと機械、オペレータと機械及び/又はユーザーと患者との間の通信システムとして使用される。ユーザー又はコンピュータは、患者を所望の位置に指示したり、X線イメージングに関連する動作、活動、及び通信に従事させたりすることができる。装置は、マイクロプロセッサを有していてもよい。マイクロプロセッサは、音声認識機能及び音変換システムを有していてもよく、音波信号をデジタル信号に変換し、イーサネット、光ファイバーネットワーク、ワイヤレスでコンピュータ又は患者と同じ場所若しくは遠隔地にあるコンピュータ機能付き電話機に送信するなどして、患者又は患者と同じ場所のユーザーからの音又はデジタルコマンドを記録して、患者に指示することが可能である。
遠隔地にいるユーザー及び/又はマイクロプロセッサは、患者又はユーザーAの本来の意図に基づいてそのような情報を理解し、ソフトウェア及び/又はハードウェアを使用することによってデジタルコマンドを使用して通信し直すことができ、又はセルラー通信などの遠隔通信メカニズムを使用するか、衛星又はインターネット又は固定電話を使用するか、デジタル情報に変換されて音又はデジタル形式で装置又はX線システムに伝送される音声、又は音を使用することができる場合がある。X線システムは、音声認識又は撮影能力を有してもよく、及び/又は、音声又は音から翻訳又は変換されたデジタル情報又はユーザーA及び/又はユーザーBからの直接デジタル情報及び/又は遠隔地又はローカルでのマイクロプロセッサ入力を処理してもよい。
X線システム及び/又は患者若しくはイメージ対象から離れた場所にいるユーザーAは、光学的若しくは他の方法又はX線イメージを介して、インターネット又は他の遠隔通信方法を介して、イメージ対象の光学又は熱イメージ若しくは測定値を見ることができる場合があり、電話またはテレビまたはコンピュータモニタまたはデジタルディスプレイまたは投影イメージなどの表示装置に示される1または複数のイメージに基づいて、X線システムの場所またはその近くにほぼ位置するユーザーBおよび/またはX線システムの場所にある通信装置に指示または通信することができる場合がある。
前記X線イメージは、デジタルエリア検出器又は光子計数検出器を用いて、及び/又はビーム粒子ストッパープレート100又はビームセレクタ又は一次周波数変調器を用いて、又は飛行時間型X線源を用いて散乱が除去された状態で撮影される。導出されたイメージは、X線イメージングシステムの場所で処理される生イメージであってもよいし、X線イメージングシステムとは異なる場所で処理されるものであってもよい。再構成されたイメージ又はリアルタイム測定値は、診断又はイメージガイダンスのためにさらにデジタル的に分析されるようにwifi、ブルートゥース及び有線接続を介して送信されてもよいし、1つ以上のマイクロプロセッサ及び/又はユーザーと遠隔地で処理又は表示されてもよい。
あるいは、診断又はイメージガイダンスのための全てのイメージ処理又は再構成又は解析は、マイクロプロセッサ又は2つ以上のマイクロプロセッサ及び/又はユーザーによってX線システムの位置で行われてもよい。
検出器又は2層以上積層された検出器は、2つの検出器の間にビーム粒子ストッパープレート又はビームセレクタを移動させるために取り付けられた可動装置を有していてもよい。そして、ホルダーのような機械部品は、検出器、ビーム粒子ストッパープレートまたはビームセレクタのそれぞれを所定の位置に保持するためのストッパーとブラケットまたはフレームを有していてもよい。そして、周囲の干渉を減らすために、アセンブリとそのフレームの周囲にビームストッパーがある場合もある。
各検出器の上には、検出器が損傷しないように、カーボンやポリマーなどの保護層があってもよい。この層は任意である。
患者テーブル又は手術テーブル又はサンプルテーブルが、対象又は患者と、ビーム粒子ストッパープレート100及び関連アセンブリ、検出器22及び残りの移動体ハードウェアが存在する検出器ガントリーの間に配置されてもよい。
X線システムの各部分は、バッテリーまたは壁へのプラグ、あるいは部屋の電源コンセントに差し込まれた中央電力装置によって電力を供給される場合がある。電力装置は、電力を必要とするX線システムの1つ以上の部分が電線とプラグとを介してそれに差し込むことができるように、1つ以上の電力プラグを有する。発電機、または熱交換器、またはX線管、または1つの検出器、または検出器アセンブリ、またはコリメータ、PCIカード、コントローラー、または通信装置、および/またはイメージ処理および/またはイメージ保存用のマイクロプロセッサなどのハードウェアのそれぞれの要素を移動する可動子または移動体などのX線システムの1以上の部分は、1つまたは複数の電池を直列または並列にして電池駆動してもよく、または壁のコンセントにプラグを差し込んでいてもいい。電池又はバッテリーは、充電式電池又は充電式バッテリーであってもよい。X線装置と接続された充電式ステーションがあってもよいし、別個のユニットとしてX線装置から取り外されてもよい。
自律走行ユニットADU-1又は自動案内装置、又は自動移動装置は、X線システムと一体化されていても、X線システムから切り離されていてもよいが、X線システム又はX線システムの一部と接続されて、取り付けられたシステムと共に場所から場所へと移動するための列車室間の接合装置又はクランプ又は機械的バックルなどの機械的取り付け又は磁気取り付けを有していてもよい。
駆動装置ADU-1は、バンのような移動車両の一部であってもよい。
走行ユニットADU-1は、以下の1つ以上を備えてもよい。
カメラ。
位置や動きを検出するセンサーおよび駆動装置。
近くの物体までの距離を検出するためのLidarまたはレーザーまたはカメラ、他のセンサー。
カメラ。
位置や動きを検出するセンサーおよび駆動装置。
近くの物体までの距離を検出するためのLidarまたはレーザーまたはカメラ、他のセンサー。
X線装置とその関連装置の寸法と3次元形状を保存するマイクロプロセッサ。ユーザー又はコンピュータからのコマンドを処理するための音声処理マイクロプロセッサを有していてもよいマイクロプロセッサ。必要なときに音やコメントや音を出したり、警報を鳴らしたり、話したりするためのスピーカーを有していてもよいマイクロプロセッサ。センサーに接続され、X線システムまたはX線システムが収容された容器とその周囲との間の相対的な空間位置を感知して計算し、速度を調整し、旋回し、操舵により方向を変え、後退し、前進し、ブレーキをかけ、移動に沿った衝突を回避することができるマイクロプロセッサ。
機械学習アルゴリズムを実現するソフトウェア。
センサーとソフトウェアを組み合わせて、車両を制御、ナビゲート、および駆動する。このようなソフトウェアは、周辺環境の連続的なレンダリングや、それらの周辺環境に対する可能な変化の予測など、自動運転車におけるあらゆる機械学習アルゴリズムの主要タスクの1つを含むことができる。これらのタスクは、主に4つのサブタスクに分けられる。
- 物体検出
- 物体の特定または認識、物体の分類
- 物体の位置と移動の予測
- 物体検出
- 物体の特定または認識、物体の分類
- 物体の位置と移動の予測
機械学習アルゴリズムは、回帰アルゴリズム、パターン認識、クラスターアルゴリズム、決定マトリクスアルゴリズムに分けられることがある。
X線システムと統合されるのは、床上のマークされた長い線又はワイヤに沿って追従するか、又はナビゲーションのために電波、ビジョンカメラ、磁石、又はレーザーを使用するポータブルロボットである。このようなロボットは、操舵制御システム及び/又は経路決定機能を有していてもよい。このようなロボットは、X線システムと一体化され、及び/又はトレーラーに取り付けられてもよく、この場合、X線システムの1つ以上の部品がトレーラーに置かれ、及び/又は外部物体の付属品がトレーラーに置かれうる。
このような可搬型X線システムは、近くの場所、例えばオペレータの視線内、又は遠隔のマイクロプロセッサ、及び/又はX線システムのイメージ又は位置又は位置測定を空間的に表示するマイクロプロセッサ及びディスプレイを有するオペレータによって遠隔制御されてもよい。遠隔地又は遠隔の部屋で、及び/又は、アクセスできないサイト又は場所へ進むため、又は危険区域のフィールドで、又は人間のオペレータに適さない部屋で、又はポイント・オブ・ケアで、患者の部屋で、スポーツのフィールド又はスタジアムで、移動するための自律走行マイクロプロセッサ及び走行センサーを有する。
このようなX線システムのソフトウェアエラーの更新とアップグレードと修正、および位置または位置移動関連ソフトウェアとX線システムの動作は、クラウドサーバまたはリモートサーバーを介して無線で、例えばBluetooth(登録商標)、WiFi、セルラーまたは衛星機構を介して、または有線接続、例えばEthernetケーブルまたは光ファイバーケーブル、またはUSBケーブルまたはローカルマイクロプロセッサを介して、ソフトウェアによって自動的にまたはユーザーによってソフトウェアを用いて行うことができる。
一般に、本開示の任意の部分は、記載された装置及び方法を全体として提供することなく、意図された目的を達成するために1つ以上の既存のシステムに追加することができる。
X線システム構造は、可搬性及びコンパクト性を確保するために、脚を調整可能な位置に配置できるように、空間的に調整可能な支持体又は脚を有していてもよい。例えば、いくつかの脚又は支持構造は、輸送又は移動中に好まれるコンパクト性を確保するために、折り畳まれるか又は移動可能な特徴を含んでもよい。
構造体の調節可能な高さの特徴は、例えば、伸縮設計を使用して、撮影中又は異なる線源から検出器までの距離におけるイメージングのために、及び/又は輸送中に好まれる又は必要とされる安定性及びコンパクト性のために、構造体の全体の高さを調節し得る。場合によっては、そのような調整又は設計は必要ないことがある。
1つ又は複数の検出器は、検出器22又は検出器アセンブリを動かすのと同じモータによって動かされることができる。X線源が移動されている間及び/又は検出器が移動されている間、X線システムの不安定化がない又は制限されるように、システムの重みを支え、X線システムの安定性に寄与するように設計された機械的構造。システム全体の振動及び/又は移動が制限され、又は撮影プロセスを妨げない。
一例では、モータ駆動アクチュエータAIなどの1つの移動体、又は複数の移動体が、関心領域又は対象と向き合い、検出器の前に置かれるビーム粒子ストッパープレート100を移動させてもよい。2つの移動体が使用される場合、1つは第1側に配置され、他のモータはビーム粒子プレート100と反対側の第2側に取り付けられてもよい。2つの移動体は、ビーム粒子ストッパープレートのほぼ同じ平面及び/又はビーム粒子ストッパーの直下の平面上にあってもよい。
一実施例では、アルミニウム製であってもよいプレート300などの機械的装置を用いて、検出器を移動体400(図30参照)または併進ステージに搭載されたガントリーに装着する。このような移動体は、筐体405によって囲まれていてもよい。
そして、X線システムの下に位置する、X線システムの1つ以上の部分に、1つ又は複数の車輪108又は移動歯車が取り付けられていてもよい。車輪は、1人以上のユーザーによって手動で移動させられるか、動力付きモータまたは動力付き歯車によってモータ駆動化され、いずれの場合も、ユーザーが移動を操舵する。あるいは、X線システムの一部またはほぼ全体が、X線システムの一部または全体に取り付けられた自律移動および操向装置または遠隔制御自律移動装置によってモータ駆動される。
検出器は、アルミニウム板に取り付けられていてもよい。検出器の両側には、例えばアルミニウム板300に取り付けられたモータA1及び/又はA2が存在してもよい。検出器の側でアルミニウム板と反対側にあるビーム粒子板に、各モータの台車などのモータの移動機構が取り付けられることができる。モータは、ビーム粒子ストッパープレート100を検出器と平行なx及びy平面内で移動させることができる。各モータは、電池で駆動してもよいし、壁面プラグや分散型電源プラグに接続された電源に差し込まれたり、X線システムの一部として電力を供給できる装置に差し込まれたり、X線システムから切り離されたりして駆動されてもよい。
モータは並列に動作していてもよい。それぞれが、ビーム粒子ストッパープレートを距離によって駆動してもよい。
電気的、磁気的又は光学的な位置センサーをモータ又はモータと共に使用して、モータの位置を原点復帰させてもよい。
情報ギャップのない完全なイメージを導き出すために、ビーム粒子ストッパーがその以前の位置から変位できるように、少なくとも一度、直線的に移動させることができる。
あるいは、関心領域を照射するX線を遮断する各ビーム粒子ストッパーの位置を以前の位置からずらすことができる限り、いかなるタイプの駆動機構又は移動又はいかなる方向への移動でも十分である。
<臨床現場即時(Point of Care)断層撮影またはスペクトルトモグラフィまたはPOC散乱除去X線イメージャー>
本明細書に開示されるX線イメージシステムは、可搬可能であり、臨床現場即時(Point of Care)で利用可能であり得る。システムの一部又は完全なシステムは、可搬性及びコンパクト性のために移動可能であり、臨床現場即時で利用可能であってもよい。このようなシステムは、多次元イメージ装置又はデュアルエネルギー又は複数エネルギー又はスペクトルイメージング装置及び/又は3Dイメージング又は4Dイメージング又は最大7Dイメージング装置であってよく、及び/又は複数の身体部分、例えばおよそ全身イメージングのイメージャであってよい。7D装置は、6次元情報を時間的に追跡することができるイメージング装置である。
本明細書に開示されるX線イメージシステムは、可搬可能であり、臨床現場即時(Point of Care)で利用可能であり得る。システムの一部又は完全なシステムは、可搬性及びコンパクト性のために移動可能であり、臨床現場即時で利用可能であってもよい。このようなシステムは、多次元イメージ装置又はデュアルエネルギー又は複数エネルギー又はスペクトルイメージング装置及び/又は3Dイメージング又は4Dイメージング又は最大7Dイメージング装置であってよく、及び/又は複数の身体部分、例えばおよそ全身イメージングのイメージャであってよい。7D装置は、6次元情報を時間的に追跡することができるイメージング装置である。
現在のエレクトロニクスは、透視イメージと、イメージの迅速な保存全てと、検出器から離れたコンピュータへの転送を可能にすることができる。ポイント・オブ・ケア又は現場において、X線検出器又はX線検出器アセンブリ、例えば、2つの検出器の間に挟まれたビーム選択器又は2つの検出器の間に挟まれたビーム粒子ストッパープレート、又はビーム粒子ストッパープレートを有する単に1つの検出器又は少なくとも一つの検出器を含む検出器アセンブリは、20イメージ以上格納できるメモリ保存能力を有していてもよい。このような検出器と保存装置は、インターネットWIFIやBluetoothなどの無線通信手段で無線接続されてもよいし、集積回路や光ファイバー、イーサネットケーブル、RS232などの接続機構で直接接続されてもよい。
関心領域(ROI)の特定するため、様々な角度で撮影された対象の1つ以上の2Dイメージが、関心領域を特定するのに十分である場合がある。ROIの特定は、VOI又は関心領域が必要な場合にのみ撮影され、可能であれば、対象への線量を減らすために寸法が最小化されるようにイメージング処理を最適化することができる。
場合によっては、イメージ化された関心領域は、ROIよりも大きな対象物の寸法を有する背景で提示されることがあり、したがって、ROIの位置又は方向付けに必要な基準を提供する。背景イメージは、より高い又は低い解像度及び/又は様々なスペクトル感度を有することができる。
検出器は、患者と、図52a~eの病院ベッド、X線テーブル、又は手術テーブル40のような、患者が寝たり座ったり休む場所との間に配置してもよく、又はベッドのような支持体と接続してもよい任意の表面であってもよい。
従来の手持ち式X線源は、散乱除去を行わずに使用されるため、用途が限定されている。本開示では、手持ち式X線源によるスペクトルイメージングX線撮影は、例えば、歯科用途、スポーツ医学における病気の診断などにおいて、より高い分解能で組織密度測定、組織分化及び病気のより良い診断、定量イメージング方法の使用及び人工分析を可能にする。
手持ち式X線イメージングシステムは、本明細書に開示されるような補間方法を用いて散乱を除去することができる。
手持ち式X線イメージングシステムは、フラットパネル検出器又はエネルギー選択的検出器セット、例えば2つ以上のエネルギー選択的検出器を含むX線検出領域の反復ユニットを有する複数のエネルギーX線源を使用して、スペクトルイメージング能力を有することができる。このようなイメージングシステムは、散乱除去装置を有することができ、持ち運び可能であり、病院又は歯科医院の1つ以上の設定又は異なる部屋で使用することができる。
手持ち式X線源は、電磁石式操向器又はピクセル化X線源を使用することによって、3Dイメージング及び/又はスペクトルイメージングが可能である。
<本明細書に開示されるX線システムの柔軟性及び多用途性>
図1~4に示されるように、少なくとも2つのX線源が使用され得る。各線源は、関心領域を照明することができる放出位置に出入りすることができる。投影された信号は、第1検出器によって捕捉され得る。このような線源は、複数のエネルギー源であってもよいし、単一のエネルギー源であってもよいし、準単色線源であってもよい。このような線源は、異なるエネルギーレベルであってもよい。例えば、1つは40-150KeVであってもよく、2つ目は20-40Kevであってもよい。
図1~4に示されるように、少なくとも2つのX線源が使用され得る。各線源は、関心領域を照明することができる放出位置に出入りすることができる。投影された信号は、第1検出器によって捕捉され得る。このような線源は、複数のエネルギー源であってもよいし、単一のエネルギー源であってもよいし、準単色線源であってもよい。このような線源は、異なるエネルギーレベルであってもよい。例えば、1つは40-150KeVであってもよく、2つ目は20-40Kevであってもよい。
X線源を放出位置又は放出位置の内外に移動させる移動機は、回転タレット又はリニアステージ、又は2次元ステージ又は3次元以上のステージ、回転移動ステージを含んでもよい。X線源は、例えば、電子ビーム偏向を介して、例えば、一組の電気光学レンズまたは電磁気または磁性板またはソレノイドコイルなどの磁気的方法によって、電子ビームを操舵することによって、放出位置に移動および放出位置に移動するように変調されてもよい。
図5~8において、図示された例では、ここに開示されたX線イメージングシステム及び装置は、第2検出器又は複数の検出器とも呼ばれる1つ以上の検出器を、線源又は関心体積又はイメージ対象に対して、第1検出器の下流又は上流に有する。
第2または第3または第4検出器は、関心領域を照射し得る放出位置に出し入れされ、用途に応じて測定が行われてもよい。そのような検出器は、手動又はモータ駆動でステージに取り付けられてもよく、及び/又は、第1検出器22の下流又は上流の各象限に到達するように回転されてもよい。各象限において、検出器又は検出器は、象限内で線形、又は2次元又は多次元の併進ステージで移動されてもよい。そのような検出器は、散乱除去装置なしでもよく、または、VOIの下流または対象の上流のビーム粒子停止板100と共に用いてもよい。そのような検出器は、第1検出器がVOIの照明経路から移動された後、第1検出器の位置に移動される。場合によっては、第2又は第3検出器が使用されてもよく、各検出器は、本明細書に記載されるように2つの検出器の間に挟まれたビームセレクタを含んでもよい。
本システムの一例は、1つ又は複数の検出器を線源に対して、及び/又は対象に対して相対的に移動させる様々な機構を含む。
線源および対応する検出モジュールの両方が、同期して移動してもよい。
1つ又は複数のX線源を検出器に対して、及び/又は対象に対して相対的に移動させるために、機械的、電気的、エネルギー駆動などの様々な機構がある。場合によっては、X線源および検出器の移動は互いに同期していてもよい。
ハードウェア及びソフトウェアは、治療プローブ又は装置の動きを、線源及び/又は検出器の動き、又は選択された視野の動き及び/又は対象の動きと相対的に又は独立して同期させるために使用することができる。X線測定値及びイメージの登録、捕捉、記録、及び保存時間並びにイメージ再構成において、X線測定値に対応する相対移動又は絶対移動データを組み込むために、対応するアルゴリズムが導出されてもよい。測定値及びイメージの推測は、対象の特性及び対象内のコンポーネントに関する更なる分析のための事実を生じさせるかもしれない。
本システムは、6D空間及び時間内の様々な場所及び位置における測定値の特定の閾値を超えるX線測定値を検出し、順に、1つ以上の選択された領域、コンポーネント、ターゲット又は対象のX線測定及び分析に関する1つ以上のイベント又は活動をトリガーすることを含む場合がある。
本システムの測定及び測定処理方法は、1つ以上の事実を決定し導き出すこと、データを整理し構造化すること、及び分析により1つ以上の事実を決定し予測するために1つ以上の事実の確率を評価すること、シナリオを作成するまたは理論を展開するまたは可能な結論を構築すること、及びコンポーネント及び対象の特性化、特定、状態、対象及び/又は監視コンポーネントおよびイメージガイダンスのための対象に、使用することができる。
場合によっては、このような測定、分析及び測定処理方法は、ユーザー入力又はデジタル入力からのデータ及び同じ又は他のモダリティによる測定からのデータと組み合わされる。
X線断層撮影システムは、例えば、X線断層撮影がROI内のボクセルを通る変化した照明経路を生成するための回転移動に基づいて再構成される場合、他の形式の断層撮影装置と組み合わされてもよい。VOIの周りのサーキュレータ投影における光源の回転移動が、少なくとも実質的に1ボクセルだけ異なる新しい投影経路を生成する限り、最小限の回転ステップは、並進移動と同様に使用することができ、次に、光源がVOIの周りで2軸又は並進直線移動と組み合わせた少なくとも1軸で回転する場合、又はらせん投影において、基本的にVOIの完全な投影イメージを生成するのにほぼ同数の全投影が必要でありうる。これは、xy平面内で線源を移動させるよりも少し複雑である。しかし、放射線治療を行う場合、投影法の組み合わせが必要な場合がある。組み合わせ投影法の再構成では、組み合わせ投影法の形状を表現できるように、追加のベクトルが形成される場合がある。
X線断層撮影装置は、次のようなイメージング方法と組み合わせてもよい。例えば、CアームやOリングに搭載された場合、あるいはトモシテシス、イメージ再構成のために、システムマトリックスは、投影イメージデータを生成する各コンポーネントのためのそのような放射線投影ジオメトリを表す自由度の数を調整する座標またはベクトルの数を有することができ、例えば、以下のシステムにおいて。
放射線を用いて物体をイメージ化する方法は、以下を含むことができる。少なくとも1つの検出器配列から投影データを得ること、少なくとも1つの実検出器配列は、物体への相対的なX線放出位置の2つ以上の位置で投影データを得ること、オプションとして少なくとも1つの検出器配列及び/又はX線源放出位置は、等線形でも等角でもないジオメトリを有する2つ以上の位置を有すること、投影データを等線形又は等角であるジオメトリを有する仮想検出器配列に再投影すること、仮想検出器配列から再投影データを再構築すること、である。
オプションとして、少なくとも1つの実検出器配列は、2つ以上の位置で投影データを取得するように構成された2つ以上の検出器を含むことができる。
オプションとして、少なくとも1つの実検出器配列は、2つ以上の位置で投影データを得るために移動可能である少なくとも1つの検出器を含むことができる。
オプションとして、本方法は、少なくとも1つの実検出器配列上に線源から放射線を投影することを更に含むことができる。
オプションとして、放射線は、X線放射を含むことができる。
本方法において、仮想検出器配列は等線形であり、または仮想検出器配列は等角である。
投影データを仮想配列に投影することは、距離又は角度において等間隔である仮想ピクセルを含むことができる仮想配列を割り当てることと、各仮想ピクセルについて、仮想ピクセルと投影放射線源を結ぶ線と交差する実検出器配列内の対応する実検出器ピクセルを決定することと、仮想ピクセルについての放射線振幅値を決定するために対応する実検出器ピクセルにおいて検出される放射線振幅値を用いることとを含んでもよい。
仮想ピクセルに対する放射線振幅値を決定するために、対応する実検出器ピクセル及び隣接する実検出器ピクセルの放射線振幅値からの値が補間されてもよい。
本方法は、仮想検出器配列からのデータをフィルタリングし、仮想検出器配列からのデータを逆投影してもよい。
本方法は、少なくとも1次元ライン検出器、又は少なくとも点検出器、又は少なくとも1つの2次元フラットパネル検出器を含む少なくとも1つの実検出器配列を有してもよい。
このような方法は、独立して動作してもよいし、少なくともX線放出位置が対象に対して移動する本開示に記載のX線イメージングシステムと組み合わせてもよい。
<多面的な特定>
複数の要因を診断に使用することができ、例えば、特定の脳関連疾患では、以下のような1つ以上の局面がある。
複数の要因を診断に使用することができ、例えば、特定の脳関連疾患では、以下のような1つ以上の局面がある。
灰白質及び白質、脳室容積、構造的及び機能的連結性並びに神経伝達物質レベルにおける変化は、特定の病気に寄与するか又はそれを示す可能性がある。
また、腸の病理学的変化や変質などの追加情報は、例えば、腸を介した免疫系の調節により、他の場所で病気に寄与することがある。
これらの各要因は、ナノボディや低分子などの抗体に結合した造影剤を用いて、または用いずに測定することができ、脳血液関門を容易に通過できる分子複合体を形成させることができる。
図42は、1つのX線源における複数の放出位置の例を示している。X線源モジュール12は、例えばxy平面内に空間的に分布する複数のX線放出位置12-1、2、3、4、又は2つ以上のX線源12-1、2、3、4を含むことができる。モジュール12全体は、位置P1から位置P2へ移動し、実質的に、移動ステップの数を減らして複数の異なるX線放出位置を作成し、それによって、イメージ取得に必要な時間を短縮することができる。
1つまたは2つ以上のX線源または放出位置を含むことができるX線源12は、それぞれが他のものとは異なる空間位置にある。場合によっては、そのような線源は、あたかもX線が同じxy平面上の場所から放射されるように配置される。X線源12は、複数のX線放出位置を可能にするためにxyの場所で移動されてもよく、X線は、X線源モジュール12、または2つ以上の放出位置のうちの1つから順次放出されることができる。X線源12が位置P1から位置P2に移動すると、P1とP2との間の距離は、z軸又は検出器に垂直な軸において所望の分解能Xcであってよい。線源12が例えば4つの放出位置を有する場合、線源が位置P2に移動すると、追加の異なる4つの放出位置が生成され、それぞれが同じ線源のP1、(P1は線源の以前の位置にほぼ等しい)から約Xcだけ変化している。4つの線源12-1、12-2、12-3、及び12-4は、場合によっては、Xcを検出器に垂直な軸における所望の分解能とし、>2Xcとほぼ同じかそれ以上の距離で、互いから分配されることが可能である。
いくつかの場合において、線源モデル12内の線源又は複数線源の放出位置間の距離は、検出器のピッチ、またはXc未満であってよい。
いくつかの場合において、X線放出位置の移動体がXcよりも移動する場合、完全な3Dイメージを再構成するために必要なイメージの数が増加することがあるが、その増加は計算上の複雑さにおいて許容可能であろう。
望ましいXcがd12より大きいか小さいかのいずれかであるとき、移動体又は電子ビーム操向器は、検出器の4×ピクセルピッチに10umを加えた距離でd12の単位又はステップで移動してもよい。最小限の放射線を達成するために撮影されるイメージの数を最小化するために、撮影されるX線イメージの数は、d12=Xcのときに完全な3Dイメージを再構成するために撮影されるイメージの数より多くてもよい。しかしながら、特に放射線が問題でない場合、及び/又は移動体が限られた増分でしか移動できない場合、又は電子ビーム操向器が3D再構成のために最適化されたイメージングルーチン及び仕様によって必要とされる操向能力に制限がある場合には、許容される場合がある。
場合によっては、放出位置間の距離は、例えば、併進ステージによって調整可能であってもよい。
場合によっては、本明細書に開示されるような断層撮影におけるイメージング方法の組み合わせ、2D、複数のエネルギー又はトモシンセシス、又は多次元イメージングが使用されてもよい。
場合によっては、1~5度より多くがイメージングに使用されるかもしれない。精度、正確さ、又は放射線若しくは撮影時間若しくは複雑さの最小化が性能上の優先事項でない場合、1~10度がイメージングに使用されることがある。
場合によっては、必要とされる総放出位置は、放出源の数の倍数であってもよい。例えば、3Dイメージを完全に再構成するために100個のイメージを撮影する必要がある場合、4個の線源だけが線源モデル12に存在する。また、4つの線源のそれぞれの周囲の総面積は、その隣接するX線放出源から離れた領域サイズである2×100/4×Xc^Xc以上、またはおおよそ10Xc以上離れていてよく、例えば12-1から12-2、または12-3から12-4の間である。4つの線源を有する線源モジュール12は、約25または24ステップのXcステップで移動してもよく、または5Xc×5Xcまたは4×6の領域を移動してもよい。
場合によっては、放出位置12-1は、12-2または12-3または12-4のような他の放出位置の隣にあることがあり、4つの線源を含む線源全体は、以前の位置と重ならない領域位置に移動することができる。
複数の放出位置設計の利点の1つは、多次元イメージングのためのイメージング速度を速めることである。
いくつかの場合において、1つの線源12における各放出位置は、様々なエネルギーレベル又は変化したパラメータ値のX線を放出することができる。各運動につき例えば、放出位置12-1は、40Kev-60Kevの間のピークでX線ビームを放出してもよく、12-2は、20-40Kevの間のピークでそれぞれ放出してもよく、12-3は、80-100Kevの間のピークでそれぞれ放出してもよく、12-4は、110-145Kevの間のピークでそれぞれ放出してもよい。したがって線源の各場所は、1つ又は複数のX線エネルギーレベルが同じ時間又は異なる時間に関心領域のほぼ同じ又は異なる体積に照明することができるようにしてもよい。
X線源12は、1つ以上のナノチューブ、フィールドエミッターベース、冷陰極源、又は1つ又は複数のピクセルを有するピクセル化源であってよい。
図1に示されるように、X線源モジュール12は、単一の位置から放射される複数の線源、例えばデュアル・フィラメント12-1及び12-2又はより多くのフィラメントを有することができる。各線源は、その他とは異なる焦点スポットサイズを有することができ、及び/又はその他とは異なる様々なエネルギーレベルを発生させることができる。
1つ以上の検出器が、第1検出器又は第1検出器アセンブリの上流又は下流で使用されてもよい。各検出機構は、図8に示されるようなデュアル検出器アセンブリを有していてもよく、又は検出器の上流にビーム粒子ストッパープレート100を配置してもよい。
生成されたX線イメージのサイズを増幅又は小型化又は調整又は変調するために、またはX線信号を変調するために、またはX線インターフェログラムを生成するために、または異なる波長で変調されたX線信号を生成するために、追加のX線オプティクスが使用されてもよい。追加オプティクスは、X線源と検出器の間、X線源と対象の間、対象と検出器の間、または検出器の下流に設置可能である。
本開示において、前述の検出器は、フォトダイオード、又は光子増倍管、又は光子カウンタ、又はX線検出器、シリコンドリフト検出器、又は堆積シンチレーション層又は光ファイバープレート若しくはシンチレーション結晶などのシンチレーション材料を有する任意の又は光学検出器及びセンサーであり得る。いくつかの場合において、そのような検出器は、ビーム粒子ストッパープレート100を有するか、または本明細書に記載されるようにビームセレクタを間に挟んだデュアル検出器アセンブリの形式であってよい。
いくつかの場合において、Cアーム又はUアームは、X線源12と一体化され、場合によっては、X線照射のための視野又はROIを選択するため、及び図30に図示されているような1つ又は複数の対応する検出器モジュール22及び23を操縦するためのコリメータに装着されている。X線透光性材料を含むX線テーブル400、又は図30に図示されているようなサンプル支持面400は、イメージングされた対象又はサンプルを配置し支持するために使用されてもよい。
いくつかの場合において、X線源及び検出器は、病院の可搬型X線源システムにおけるような可搬型であり、4つの車輪によって支持されるケース内で移動させることができる。検出器又は検出器アセンブリは、スロットに格納することができ、必要なとき、及び検出器モジュールを対象のイメージ捕捉を可能にする位置に手動で配置されることができる。
いくつかの場合において、本明細書に開示されるX線システムは、1つ以上の小動物又は生体外サンプル、生体外サンプル、又は非破壊試験又はセキュリティ・スキャンにおけるサンプルをケース付き容器又は筐体内に配置できるテーブルトップ型にすることが可能である。ケースまたは筐体は、鉛で内張りされていてもよい。サンプルは、コンベアベルトまたはサンプルホルダに置くことができる。サンプルホルダはモータ駆動式でもよい。サンプルは、サンプルホルダをユーザーがアクセスできるようにした開口部から、またはサンプルハンドリングロボットから、サンプルホルダに配置することができる。このようなサンプルホルダは、ケースから突出した位置又はケースの内部にあるようにモータ駆動化されてもよく、サンプルホルダがケースの外部に位置する間に、サンプルがサンプルホルダに載置されてもよい。かかるサンプルホルダは、ケースの内部で移動するようにモータ駆動化されてもよく、いくつかの場合において、撮影されるサンプルのためのX線投影経路に存在してもよい。サンプルは、マイクロ流体チップ内またはラボ・オン・ア・チップ装置上または組織チップまたはペトリ皿または顕微鏡スライドまたは組織または動物または細胞の保持または支持装置、または組織成長または細胞成長を助長する装置内に配置されてもよい。
ケース、又は筐体、又は1つ以上の側部若しくは部分及び/又はケース若しくは筐体の全ては、可視光などの光に対して半透明であり、同時に、X線を減衰させることができる。例えば筐体の1つの側部は、例えば鉛ガラス又はホウケイ酸ガラスを含む窓を含んでもよい。このような窓は、任意の形状であることができ、好ましい実施態様では、長方形または円形または正方形の形状である。
別の実施態様において、そのような筐体の内部には、試料又は試料の構成要素の動きを検出又は感知するため、又は筐体内の1つ又は複数の領域を監視するための1つ又は複数の光源、1つ又は複数のセンサー又はカメラが存在してもよい。
場合によっては、そのようなケース又は筐体は、最大で6つの側部を有していてもよい。筐体は、部屋であってもよいし、建物の一部であってもよい。いくつかの実施態様では、そのような筐体は、任意の空間構成及び寸法、例えば、球形又はバックマスターフラー球形(buck minister fuller sphere shape)又は円筒形又は長方形の体積又は立方体の体積であってよい。一実施態様では、筐体内のそのようなX線イメージングシステムは、可搬性を可能にするために4つの車輪上に置かれ、他の実施態様では、筐体を有するそのようなX線イメージング及び測定システムは、X線減衰材料で内張りされてもよく、使用のために机上に置かれることができる。
筐体は、筐体内に置かれた物体を測定及びイメージングするための多数のバイタルサイン、温度、湿度、圧力及び生理学的モニタリング装置及び/又は他のモダリティを含んでもよい。
X線源の下流にあるハードウェア又はモジュールは、1つ又は複数のフィルタを備えたモータ駆動コリメータなど、対象へのX線照射を制限又は選択するために統合されてもよい。X線源、又は検出器、又はシステム内の他のオプティクスに対してサンプルを位置決めするための光又はレーザーマーカーを含むことは、本開示の防止策の一局面である。
本明細書に開示されるX線システムは、電源、X線管、検出器又は検出器アセンブリ、及びいくつかの場合において、追加のセンサー、又は検出器、又は光学装置、又はX線オプティクス又はコリメータ、又は対象を位置決めするためのレーザーマーキングシステム、検出器及び他のモジュール又はサブアセンブリとともに、ペリカン・ブリーフケースに折りたたむことが可能である。
X線イメージング装置及び方法は、2つ以上のX線源、又はデュアル若しくは複数のフィラメント線源、又は準備時間、露出、速度、パワー、エネルギーレベル、エネルギーレベルの数、スペクトル波形特性、パルス持続時間、パルス特性及び/又はフォームファクタなどのそのパラメータにおける他の変化した値を有する線源をおよそ一つ以上のX線放出位置に含むことができる。X線イメージングシステムは、X線検出器の上流又は下流に移動可能な1つ又は複数の検出器を含んでもよい。検出器は、解像度、速度、スペクトル値、波長、感度、ダイナミックレンジ、光子感度、量子効率、分光感度、又は検出器を他と区別し得る他の特性において、互いに同じであっても異なってもよい。
一例において、X線システムは、少なくとも1つのコンピュータ又はマイクロプロセッサと、少なくとも1つのディスプレイモニタと、ユーザー又はプログラムが測定活動を物理的にトリガーするためのハンドスイッチ及び/又はフットペダル又はフットスイッチと、組み立てられたコネクタ及び多数のハードウェアコンポーネント及び電子機器への接続を有する1つ又は複数の集積チップ、例えば以下の項目のうちの一つ又は複数を制御できる一つ又は複数の制御器とを含んでもよい。運動又は変調機構は、X線源又はX線放出位置、X線イメージングシステムの関心領域又は視野を調整するためのコリメータ、ビームセレクタ又はビーム粒子ストッパープレートのための運動系を動かしてもよい。運動又は変調機構は、様々なX線光学系のための運動システム及び/又は変調プログラムを動かしてもよい。運動又は変調機構は、検出器の各々、データ取得のための検出器又はセンサーの各々のための制御ユニット、X線測定の2つ以上の側面の同期のためのソフトウェアユニット、及び/又は1つ以上の試料操作及び摂動又は物理又は化学測定システム用の制御ユニットを動かしてもよい。システム内の様々な構成要素は、1つ以上のワイヤ、及び/又は1つ以上のケーブル、光ファイバーケーブル、又は無線LAN、光学機構又はアンテナ、又はイーサネット、又はブルートゥースによる無線通信を含む無線機構によって中央コンピュータユニット又は集積回路チップにリンクされてもよい。このようなシステムは、無線またはインターネットまたは有線のプロトコル、ハードウェアおよび方法を介して、PACシステムまたは医療記録システムまたはデータベースとリンクされてもよい。
X線測定装置、又はコンピュータ断層撮影装置は、新しい機能、特徴及び解像度の能力に基づくイメージ及び測定値並びに特徴の提示に加えて、表示モードを提供し、ユーザインタフェース上に値及びイメージを提示することができる。
X線イメージングシステムは、およそ1つ以上のX線放出位置に、準備時間、露出、速度、パワー、エネルギーレベル、エネルギーレベルの数、スペクトル波形特性、パルス持続時間、パルス特性及び/又はフォームファクタなどのそのパラメータにおいて変化した焦点サイズ及び/又は他の変化した値を有する2以上のX線源又はデュアル以上の線源を含むことができる。X線イメージングシステムは、X線検出器の上流又は下流に移動可能な1つ又は複数の検出器を含んでもよい。検出器は、空間分解能、速度、スペクトル値に対する感度、1つ又は2つ又は複数の波長又は異なるエネルギーレベルに対する感度、プログラム可能性、ダイナミックレンジ、光子感度、量子効率、スペクトル感度又はハードウェア設計及び検出器を他から区別し得る他の特性において互いに同じでも異なってもよい。
例えば、第1検出システムは、ビームストッパー粒子プレート100と対象の間に配置され得る。第2検出器は、ビームストッパー粒子プレートの下流に配置される。第1検出システムは、点検出器であってもよいし、線形検出器、2次元検出器、又は分光器であってもよい。
別の例において、X線源と第1検出システムの間には、ビームストッパー粒子プレートが存在しない。これは、第2検出器又は検出器システムが上流にビームストッパー粒子プレートを有していてもよく、第2検出器上の散乱信号は、第2検出器上の低解像度散乱測定値から補間されるからである。その結果、第2検出器上の高分解能の一次X線を導出することができる。第1検出器の対応する位置の一次信号は、異なる関心材料を用いて様々な厚みで第2検出器上の一次信号と相関があるので、各材料は、対象、または関心領域、または成分について材料分解のために選択された各エネルギーレベルの細線ビームによって校正される。第1検出器上の低分解能および高分解能の散乱信号を計算し、導出することができる。最終ステップでは、合成測定信号から高分解能散乱を差し引くことで、第1検出器の一次信号を導出することができる。したがって、第1検出器の上流にあるビームストッパー粒子プレートは必要ない場合がある。特定の位置における1つ又は2つの又は一組のエネルギーレベルの一次信号は、特定の密度及び厚さを有する特定の組織の導出値、又は基準データベースからのシミュレーション値若しくは測定データに対応することができる。基準データベースは、第1及び第2の検出器の両方における2つ以上のエネルギーレベルのそれぞれにおける2つ以上の材料の複数の非国際単位(imperial)測定によって確立されることができる。密度および厚さデータは、各データポイントにおける各エネルギーでの6つ以上の対応する測定データの補間により導出することができる。各材料について測定回数を増やすと、設定したエネルギーレベルにおいて、予測値が実測値から0.05%もずれない場合がある。その結果、様々なエネルギーレベルの設定値における残りの値を補間して、参照データベースに格納することができる。第1検出器及び第2検出器は、それぞれ、様々なエネルギーレベルにおける特定の材料に対して異なる検出器応答関数を有していてもよい。本開示は、このような方法を、3つ以上の材料に対応する3つ以上のエネルギーレベルに拡張する。
対象内の関心領域におけるターゲット中の個々のコンポーネント、例えば、骨および軟組織を含む体内の個々の組織または物体、または少なくとも2つのコンポーネント、それぞれが異なる原子z数または少なくとも1つのX線測定可能特性の異なる値を有する対象の、より良い可視化および定量化のための方法。
X線イメージにおける第2コンポーネント又は組織からのイメージの干渉は、異なる1または複数のコンポーネントのイメージから除去可能である。例えば、本明細書に開示されるこの方法は、その重なった軟組織X線投影イメージ上の骨干渉を除去することができる。この方法は、二次元デュアルエネルギー又はトリプルエネルギー又はマルチエネルギーの使用に基づくことができる。一の好ましい例において、デュアルエネルギーシステムX線イメージングシステムが使用される場合、本開示は、以下の3つの手順を含む方法を提供する。
(A)デュアルエネルギーX線イメージングハードウェアシステムを通して、骨構造によって重なり合った関心軟組織を含む対象について、高エネルギーレベルH、及び低エネルギーレベルLでのデュアルエネルギーイメージのペアを取得するステップ。
(B)デュアルエネルギー分解法を用いて、取得したデュアルエネルギーX線イメージペアデータを2つの物質組成イメージ:人体軟組織イメージ及び骨イメージに変換するステップと、を含む。これは、所望のイメージ情報が存在する軟組織イメージに課せられた骨イメージの直接的な干渉を除去するためである。
(C)軟組織内部で元々骨が占めていた空間による骨との関連での間接的な干渉効果を補償する。補償方法は、2つのステップを含むことができる。(1)元々分解された骨イメージを骨に等価な軟組織イメージに置き換える(2)元々分解された骨イメージが位置する正確な幾何学的位置において、骨に等価な軟組織イメージを元々分解された軟組織イメージに再インストールする。
(A)デュアルエネルギーX線イメージングハードウェアシステムを通して、骨構造によって重なり合った関心軟組織を含む対象について、高エネルギーレベルH、及び低エネルギーレベルLでのデュアルエネルギーイメージのペアを取得するステップ。
(B)デュアルエネルギー分解法を用いて、取得したデュアルエネルギーX線イメージペアデータを2つの物質組成イメージ:人体軟組織イメージ及び骨イメージに変換するステップと、を含む。これは、所望のイメージ情報が存在する軟組織イメージに課せられた骨イメージの直接的な干渉を除去するためである。
(C)軟組織内部で元々骨が占めていた空間による骨との関連での間接的な干渉効果を補償する。補償方法は、2つのステップを含むことができる。(1)元々分解された骨イメージを骨に等価な軟組織イメージに置き換える(2)元々分解された骨イメージが位置する正確な幾何学的位置において、骨に等価な軟組織イメージを元々分解された軟組織イメージに再インストールする。
軟質材料、または軟質媒体、または軟組織イメージングのX線イメージングを改善する装置および方法X線システムは、例えば、一般X線システム、またはCTスキャナ、またはCTスキャナとは異なる3Dまたは多次元X線システム、またはビームセレクタまたはビーム粒子ストッパープレートの、および/または補間方法を含む散乱除去装置と方法を有するX線システムであってもよい。スペクトル測定、または多次元イメージング、またはスペクトルイメージング、または点、1D、2D、および3Dトラッキングが可能なものであってもよい。本システムは、車輪などの移動機構、時には自動運転または遠隔操作による移動機能を有する移動式または可搬式システムと一体化されるか、またはそれに取り付けられることが可能である。そのようなシステムは、およそ例えば35インチ幅と6フィートと8フィートの高さを有するドア、または医療用ドアを通過するのに十分コンパクトであってもよい。
波長の制限、フレームレートの制限、解像度、感度、エネルギー感度、品質などの制限といったハードウェアの制限によるX線システムの能力を拡張するために、システム構成は、従来のホットフィラメントをベースとする管とともに、ナノチューブまたはフィールドエミッタをベースとする管などの新しいハードウェアの受け入れ対応を可能とされる。一例において、選択されたX線管および/または対応する検出器を移動させて、測定のための位置を最適化することができる。第2回目の測定は、同じ検出器を用いて行うことができるが、別の管を同じX線放射位置に移動させることができる。X線管と検出器のペアは、Cアームなどのように一緒に移動させてもよいし、独立して移動させてもよい。第1のイメージング位置の代わりに異なる検出器を用いてもよいし、同じ対象および/またはROI上の異なる空間位置を用いてもよい。
図1に示すように、X線は、X線源モジュール12から生成されることができ、対象2を照射し、ビーム粒子ストッパープレート100を通過し、検出器22によって収集されることが可能である。いくつかの場合において、X線透光性プレートのような対象を支持する機構が、対象とビーム粒子ストッパープレート及び検出器の間に配置され得る。
X線検出器がデュアル検出器とビーム粒子ストッパープレートとを含むことができる場合、ビーム粒子ストッパープレート100は、ビーム粒子ストップによる照射対象2の欠損データを第2のイメージで得ることができるように、アクチュエータによって移動可能である。場合によっては、第2のイメージは、異なるエネルギーレベルで撮影されてもよい。
図2及び図3では、複数のX線源12-a~12-eをイメージングに使用することができる。好ましい実施態様では、X線源は、各線源が回転によって対象に対する照明経路の内外に移動できるように、タレットに配置することができる。
図4は、2つ以上のX線源を含み、そのような源を直線軸で移動させる機構を示す図である。
図5は、回転ステージのような回転運動装置が、回転軸に沿ってX線源を移動させる実施態様を示す図である。
図6は、線源がxy平面上にあり、回転ステージと同様にxy併進ステージによって移動可能であることを示す。図6は、複数のX線と検出器のペアを表し、例えば1つ以上のX線源と検出器のペアの例を示している。線源13とそれに対応する検出器27は、線源12と検出器22のペアと同じ平面上に配置されてもよい。X線源13は、元のX線源12及び検出器22のペアの中心軸から最大90度まで配置されてもよい。X線源13は、ビーム粒子ストッパープレート100-2を通過して検出器27に到達してもよい。
このようなセットアップは、イメージ取得速度を増加させ、又は対象の別の幾何学的情報を与え、又は対象の特定の関心領域へのアクセス性を増加させることができる。このような追加のX線源及び検出器は、解像度、イメージ取得速度、焦点サイズ、移動度、フォームファクタ、又はスペクトル波長若しくはエネルギーレベル、追加のハードウェア部分、追加のX線オプティクス又は上記すべての2つ以上の組み合わせなどにおいて異なる又は同じパラメータ値を有することができる。
2つ以上の検出器が、互いに対して様々な角度で配置されている場合がある。これらは、1つのX線源を共有してもよい。
1つの検出器によって取得されたデータは、第2または他の検出器のデータ取得プロセス及び方法を導くことができ、逆もまた然りである。データ解析には、すべての検出器からのX線測定値とイメージセットの合計が必要な場合がある。
これは、異なる検出器を使用して、変化した角度でイメージを提供し、複数の位置からのイメージを組み合わせて1つの単一の断層撮影イメージを再構成することによって多次元イメージの再構成を行う従来のイメージング方法とは異なるものである。本開示では、各X線源はX線断層撮影測定が可能であり、異なる空間位置にある複数のX線源は、高速取得を確実にするために測定、特にスペクトル測定、又は複数次元の測定のために、測定を組み合わせることができる。複数のX線源を再び同時に動かして、測定回数を組み合わせるなどして、断層撮影の速度を向上させることができる。従来の断層撮影法またはトモシンセシス法との1つの違いは、1つのX線源または放出位置のX線源と検出器のペア中心軸が、X線源と検出器のROIと中心軸に対して、例えば10または5または4または3または2または1度未満で互いに近いことが好ましいということである。
X線ビーム粒子ストッパープレート100を使用する場合、X線ビーム粒子ストッパーによって減衰されるX線ビームによって照射される対象の領域に起因して、イメージデータのギャップが存在する。別の検出器又は別の角度でのX線源及び検出器の別のセットを有することは、別の角度で対象又はVOIを照射することによって、欠落したデータ情報を捕捉することができる。欠落しているデータの全てではないにしても、少なくとも一部を取り出すことができる。疾患組織の特定のコンポーネント又は造影剤で標識された腫瘍若しくは幹細胞の位置における存在を走査する際に、ある少量の領域が欠落している場合、欠落した情報に寄与する領域の第2のデータセットを同時に取得することができ、それによって、システムの動作要件を低減し、データ型の柔軟性と追加の種類の情報が得られる可能性を増大させることができる。
図7は、2つ以上の検出器44、好ましい例において、(各検出器は、その性能パラメータ、例えば、フレームレート、又は解像度の異なる値を有する)第1の検出器22の下流に配置され、検出器は、少なくとも1軸空間的及び/又は回転的段階における移動を伴う段階に配置される。好ましい例において、(各検出器は、その性能パラメータ、例えば、フレームレート、又は解像度の異なる値を有する)第1の検出器22の下流に配置され、検出器は、少なくとも1軸空間的及び/又は回転的段階における移動を伴う段階に配置される。別の実施態様では、検出器を移動させるために、他のタイプのロボット工学又は移動機構が使用されてもよい。図7は、R1のような回転ステージが、前方検出器22の下流に配置されている構成を示す。回転ステージにより、1つ以上の検出器29を移動させることができる。それぞれは、対象2の関心領域のX線測定値を収集する場所に移動させることができる。
必要とされる解像度及び必要とされるフレームレートに応じて、X線源、及びいくつかの場合において検出器を選択して、対象における選択された関心領域をイメージ化することが可能である。
本開示は、例えば、ハードウェア及び/又はソフトウェアのアルゴリズムオプションの同じ又は変化したセットを使用して、測定及びイメージングのための一又は複数の関心領域のズームイン又はズームアウト、又はサンプル、並びにターゲット及び/又はサンプル内のコンポーネントの特徴及び特性の詳細な探索を可能にし得る。例えば、トラッキングの場合、低解像度の測定で十分な場合もあるが、一又は複数の選択された関心領域の測定のためのより速いフレームレートが必要な場合もある。本システムは、ユーザー入力及びアプリケーション要件に応じて異なるハードウェア及び/又はソフトウェア機能を使用して、1つ又は1組の第1のX線イメージ又は測定が最初に撮影され、1つのイメージ又は複数の第2のイメージが撮影されることを可能にする。本開示では、X線システムは、選択された関心領域に対する多様なイメージング要求の要件に対応することができ、及び/又は、速度、解像度、スペクトル情報若しくはタイミング又はオプションの様々な組み合わせにおける様々な測定におけるオプションの柔軟性を可能にすることができる。さらに、特定の成長または細胞イベントまたは細胞間イベントまたは生理学的イベントまたは化学物質が発生すると、X線または光学的方法などの他の測定モダリティにおける測定値または測定値をもたらし、または電気またはエネルギー測定値が検出されて、トリガーアクティビティとして定義される。そして、そのような活動は、ソフトウェアプログラムまたはユーザーが、追加の測定またはイメージングを行うためにX線システムを駆動することをコンピュータに許可または命令するためのトリガーとなる。例えば、モニタリング測定において、特定の細胞相互作用または腫瘍成長または幹細胞移植成長または組織成長または疾患が存在すると測定された場合、追加の測定またはイメージ化が行われ、活動が発生する領域をさらに分析して、そのような活動または活動の影響を受ける領域をさらに特徴付けるか、または関心領域における事象または活動のカスケードをさらに監視し、任意に時間的に敏感であってもよい。
典型的には、前方検出器22は、1の第1イメージ、又は複数イメージ及び/又は測定値の第1セット、と呼ばれるイメージを捕捉する。第1イメージから、対象の1つ又は複数の関心領域が選択され得る。次元イメージが撮影され再構成されるか、又は、検出器22の下流又は上流のいずれかの第2検出器又は検出モジュールが、点、又は1次元、又は2次元又は3次元のフォーマットで関心領域のX線測定値を撮影するように位置決めされる。検出モジュールは、一対の検出器、又はビーム粒子ストッパープレート及び検出器によって挟まれた吸収測定装置又は分光器又はビーム選択器であってもよく、場合によっては、ビーム粒子ストッパープレートは、検出器表面からum~mm~cm又はインチの範囲のようないくつかの間隔を残して、ビーム粒子ストッパープレートを検出器よりもわずかに高く位置付けるために一式の支柱及びクランプなどのハードウェアによって支持されてもよい。そして、いくつかの場合において、アクチュエータ又は線形併進ステージ又は2軸以上の併進ステージが、対象2及び/又は検出器22及び/又はX線源12に対してビーム粒子ストッパープレート100を移動させるために使用されることがある。
X線イメージング装置及び方法は、細胞選別、細胞分離及び/又は細胞操作装置、組織工学及び成長装置、生体外組織及び生体内処置における装置、ソフトウェア、方法及び光学イメージング及び光学測定方法と統合することができる。
一例において、少なくとも1つのX線源及び1つの検出器が、試料内の他のハードウェアからの視界妨害のない形状に配置され、X線が、細胞試料などの対象内の関心領域を照射する。
コンポーネント、ターゲット及び関心領域は、単一又は複数のエネルギーレベル、又は単色又は多色の2D投影イメージ、又は点、又は1D投影測定を使用して、多次元又はほぼ完全な3Dイメージを再構築することによって測定可能である。したがって、各コンポーネント、又はターゲット若しくは関心領域の形状、厚さ、及び空間位置並びに6D測定値、場合によっては時間特性及びフローダイナミクスを決定することができる。いくつかの場合において、造影剤が、そのようなコンポーネント又はそのようなコンポーネントの解剖学的マーカー又は解剖学的マーカーを標識するために使用され、又はそのようなコンポーネントは、放射線不透過領域を含んでもよい。
対象又は関心領域の複雑さに応じて、単一又は複数のエネルギーレベルにおけるグレーチング干渉法及び逆投影法を用いたX線位相X線撮影法による空間位置、厚さ及び形状の測定が使用され得る。厚みの測定は、X線源を移動させるか、または複数のX線源を有することによって達成されてもよい。厚みの測定は、X線源を移動させるか、又はそれぞれが1つのエネルギーレベル又は複数のエネルギーレベルを有する1つ又は複数のX線源を有することによって達成されてもよい。コンポーネントの厚み及び/又は形状を測定するためには、完全な3次元再構成を行わない多次元イメージで十分である場合がある。低解像度の3Dイメージは、コンポーネントの形状、空間的位置及び厚さを測定するために使用されてもよい。解剖学的マーカーは、コンポーネントの厚みと形状を計算するために使用されることがある。骨の様々な領域と、骨組織や他の種類の組織の解剖学的マーカーとの空間的な近さを使用することができる。
1つのX線放出位置における1つ以上のエネルギー測定により、対応する厚さ、したがって3D形状を有する1つ以上の密度を有するデータベースを関心領域において確立することができる。1つまたは複数の異なるX線源放出位置での測定を行うことができる。測定は、単一のエネルギーまたは複数のエネルギーレベルであってもよく、データベースを照合するために使用することができる。
3D又は複数次元データセット内の各ボクセルが測定され、したがって、1つ以上の波長における加重スペクトル応答又は加重減衰値又は減衰値などのスペクトル応答、エラストグラフ測定、又は焼灼術後又はエネルギー変調又は位相コントラスト測定前によって特徴付けられることがある。厚さデータ及び密度がゆっくり変化する特定のセグメントの空間的位置は、コンピュータによって与えられた一連の基準に基づいて、又は参照データベースで調べることによって、又はユーザーによって与えられることによって、各ボクセル及びカテゴリ又はセグメントにおける密度及び減衰値に基づいて分析し結論を引き出すことによって導かれてもよい。
単一、2つ以上のグレーチングベースの位相コントラスト及び暗視野イメージは、厚み及び形状測定値を達成するために、シングルエネルギー又は複数のレベル測定値と共に使用され得る。対応する厚さ及び形状又は密度測定値を有するデータベースは、測定値とは別に確立することができる。シングルエネルギー、又はより多くのエネルギー、又は位相コントラスト測定は、1つ以上のX線放出位置において、場合によっては外部ERC又はIRCを用いて、コンポーネントの厚みと形状を決定するために使用することができる。
さらに、X線オプティクスミラーを使用する単一または2つ以上のグレーチングシステムに基づく干渉計は、対象を通過するX線ビームとは別の遅延線を生成し、検出器で結合して干渉パターンを形成し、空間内の構造、形状、厚さ、および位置を示すことができる。
構造、形状、厚さ及び密度並びに空間及び時間における位置の決定には、予測データ及び/又は非国際単位(imperial)測定を有する参照データベースを使用することができる。
参照データベースは、既存のデータに基づく1つ以上の組織タイプと、現在の対象に関する測定データとを組み合わせたリアルタイムのシミュレーションデータに基づいてもよい。例えば、骨密度測定において、骨組織に直ぐ隣接する軟部組織の密度を測定してもよい。組織の変化が緩やかな場合は、1回計測してデータベースと照合したり、2回撮影して厚みを求めたりすることで、より正確な軟部組織の厚みの予測を導き出すことができるかもしれない。軟部組織の厚みと密度が決定され、対象の外郭のジオメトリ形状が決定されると、骨の厚みおよび/または密度が決定される場合がある。
イメージ又は測定のほとんどは、本明細書に記載されるようにX線散乱が除去されているか、又は低いX線散乱特性を有する対象物を有することができる。および/または、測定は、検出器関心ピクセル領域において十分な散乱を発生させないX線細線ビームを用いて行われることができる。このようなX線細線ビームは、検出器上の各投影X線測定に対して散乱信号を生成するように、または無視できる散乱信号を生成するように、隣接するX線ビームから遠く離れて分布している。
例えばX線フィルタを用いた生成、及び/又はX線測定のための関心領域の決定及び/又は識別は、一セット以上の基準に基づくコンピュータ分析に基づいてリアルタイムで行ってもよいし、予め決定されていてもよい。
関心領域又はコンポーネント又はターゲットは、ユーザー入力又はデジタル入力に基づいて連続的に決定され、特定されてもよく、又はイメージングプロセスを通してコンピュータからの1セット以上の基準に従ってシミュレートされてもよい。
例えば、コンポーネントの3Dイメージが再構成されると、そのような情報に起因して事実が導出される場合がある。隣接するコンポーネント又は関心領域又は対象は、今や、その領域内の1つ又は複数のコンポーネントを更に特徴付ける又は追跡するための関心領域となり得る。
あるいは、より詳細な測定のために、より高い解像度のイメージが撮影されるか、より高いフレーム・レートのイメージがより小さな体積について撮影されることができるように、新しい関心領域又はより多くの関心領域を決定するために低解像度3Dイメージが撮影されることがある。
このようなプロセスは、反復的であってもよい。
反対に、小さな関心領域の高解像度イメージが撮影された場合、ユーザー又はコンピュータは、マクロ環境を特徴付けるためにより大きな関心領域を撮影するかどうか、又はさらなる特徴付け又は分析のために異なる空間位置の関心領域を撮影するかどうかを決定することができる。例えば、癌細胞または組織領域を特徴付ける場合、癌領域を取り囲む血管および毛細血管は、血管新生をさらに研究するために特徴付けられ、監視される必要がある場合がある。また、がん細胞領域に隣接する細胞マトリックスと細胞をさらに研究して、がん細胞の影響を理解し、外科的切開が必要な領域を決定する必要があるかもしれない。神経回路解析では、個々の細胞が空間的に配置され識別されると、細胞間の相互作用を評価するために、より広い視野が必要となる場合がある。放射線治療やロボット手術、イメージガイド手術やエネルギーベースの焼灼術では、手術中の残像や手術計画、手術結果に基づいて、関心領域を継続的に特定することができる。
本明細書に記載される2D、多次元測定及び/又は3D測定は、X線イメージ及び測定の拡大及び/又は操作又は操向又は小型化のためにX線オプティクス及び/又は増強剤又はシンチレータプラスオプティクスを使用することができる。
集束要素またはコリメート要素、またはポリキャピラリーオプティクスまたは楕円形または単一の放物面、無色またはKBミラー、ツイン放物面、楕円形またはWolter型、無色または単色のコリメートまたは集束、または拡大または縮小などのX線オプティクスを用いて、X線集光レンズの後方開口部にX線を導き、ビームフィルターやピンホール要素で対象または関心領域の上流に焦点サイズのビーム開口を生成することができる。
鏡、減衰器及び/又はフィルタ及び/又はグレーチング及び/又はビームスプリッタ及び/又はオプティクス又は結晶又はプリズム又は屈折又は屈折オプティクス、及び光学モジュール、または光学波長範囲の電気光学モジュールおよびX線オプティクスは、干渉、同期または非同期測定のような異なる分析の相互干渉を操向し、または選択し、フィルタリングし、操作および形成するために経路内で使用されてもよく、光およびオプティクスモジュールを選択的に操作し、または電子ビームマニピュレータ、またはX電子ビーム発生装置、電子ビーム、X線発生器、X線オプティクス、X線要素、エネルギー発生器、経路の検出器、または試料または関心領域の摂動内のオプティクスおよびサブモジュールの各々を操作するための機械的またはエネルギーベースの変調器または運動システムである。
検出及びビーム操向のバリエーションにより、対象からのX線出力は、光学カメラと組み合わされた増感装置によって収集されることができ、場合によってはこれらの間のオプティクスによって、減光又は集光又はコリメート又は操向され、及び/又は大判X線検出器又は大判シンチレータに、イメージセンサ又はX線オプティクス又は光学結合センサーが加わる。場合によっては、光ファイバーテーパーを使用して、シンチレータ付きまたはシンチレータなしのイメージセンサまでテーパーダウンする。あるいは、対物レンズ(X線オプティクスまたは紫外線から近赤外線までの光用オプティクス)を用いて、X線をデジタルX線検出要素が使用可能なサイズにテーパー加工するか、シンチレータと光センサーの組み合わせを使用することも可能である。
シンチレータ又は増感装置は、光学系及びセンサーの上流に配置されてもよく、又は、X線オプティクスの下流及びイメージセンサーの上流に配置されてもよい。
本開示では、分光法又は非線型顕微鏡を用いた光バイオプシーによるイメージングを使用して、場合によっては、構造照明又はハイパースペクトル分光法及びイメージングを用いるなどの超解像度イメージングと組み合わせて、1以上の詳細及び事実を特定、特徴付け、診断に導く、又は機械トレーニング、機械学習、イメージガイダンス又は事実発見のためのAIアルゴリズム用のベース用に使用することが可能である。さらに、関心領域は、さらに特定され、分析されるかもしれない。
整列前の腫瘍病変では、複数のマーカーや異常な血管の伸長を認めることがある。しかし、さらに検査を行い、他の要因を考慮しなければ、悪性腫瘍の予測がつかないこともある。さらに単分子、単細胞、細胞集団の解析やイメージ化、分子事象や相互作用の動態を調べるために、シリコンフォトニクス内視鏡、モノリシックフォトニック回路を用いたイメージング装置、顕微鏡などの光学的手法を用いて高解像度機能イメージを行うことが可能である。イメージは細部を拡大したり、生体内のサンプルを分析するための別のデータポイントを提供したりすることができる。
図1に示すように、デュアルエネルギー、又はトリプルエネルギー又はスペクトルX線イメージシステムは、2つのエネルギーレベルと同じかそれ以上のマルチエネルギーX線源12と、2次元X線検出器22と、を含むことができる。検査対象の対象2は、関心領域を含む身体とすることができ、この関心領域は、付随する骨によって重なる軟組織を含むことができる。人間または動物の胸部投影イメージでは、対象は、肋骨、胸骨、脊椎骨を含む胸郭壁の骨と、胸郭壁の随伴軟組織、肺、心臓、肝臓、脾臓、胸部横隔膜等の内臓を含む。内臓はすべて軟部組織でできている。内臓の違い、胸壁の筋肉の違いによる軟部組織の正確な構成は、X線吸収係数が若干異なるが、X線エネルギーEの関数として平均化された共通のX線吸収係数μs(E)を有するなど、すべて近似的に同一として扱うことができる。イメージ対象2は、X線源12とX線検出器22との間に位置することができる。X線源は、制御可能なエネルギーを有する2つ以上のパルスX線を放出する能力を有することができる。X線源は、平均エネルギーレベルHの高エネルギー・パルスに続いて平均エネルギーレベルLの低エネルギーパルスの2つの連続したパルスを放出することができ、各パルスは、単一の再現可能なエネルギースペクトルを有することができる。X線検出器22は、2次元X線イメージ情報をコンピュータに送信されるのに適したデジタルデータの集合に変換する任意の2次元デジタルX線検出器とすることができる。現在、2次元X線検出器には、従来の2次元X線検出器と、米国特許第5,648,997号及び第5,771,269号に記載されているような散乱除去機能を有する2次元X線検出器アセンブリとがあり、それぞれの全体は、参照により本願明細書の一部とみなされるものとする。従来の2次元(エリア)X線検出器は、不可分な散乱干渉として、その出力信号に混在する一定量のランダム散乱X線を必然的に受信する。米国特許第5,648,997号および第5,771,269号は、改良型3層検出器アセンブリ構造を使用して散乱干渉を除去する効果的な方法を提供している。高品質な結果を得るために、X線検出器の構造およびデータ処理手順については、これらの特許の指示に従うことができる。X線源、一次X線変調器または単一コリメータ、または1つのビーム粒子ストッパープレートを含む散乱除去の他の方法が、本明細書に開示される。一方、本開示は、任意の従来の二次元X線検出器の使用を排除するものではない。散乱干渉は、結果の品質に悪影響を及ぼす。しかしながら、X線検出器が十分に少量の散乱干渉しか受けない場合、ある状況下では、定性的には正しいが、定量的には不正確なイメージ結果が依然として得られる可能性がある。散乱線の干渉をどの程度まで許容できるかは、ケースバイケースであり、個別の分析によって決定することができる。
放射線を用いて物体をイメージ化するためのシステムは、放射線源と、2つ以上の位置で投影データを取得し、等線形でも等角でもないジオメトリを有する少なくとも1つの実検出器配列と、等線形または等角のいずれかの形状を有する仮想検出器配列上に投影データを再投影し、仮想検出器配列から再投影データを再構成するデータ処理装置とを含むことができる。
イメージングシステムは、X線源及び/又はコリメータのための支持構造及び/又は移動体と、及び/又は、1又は複数のX線検出器を支持あるいは移動させる同じ構造又は別の構造、を含むことができる。
X線源の照射線と物体から出るX線は、検出器によって収集され得る。本システムは、X線放出位置を移動させるための電磁操向器及び/又はモータなどの移動機構、フラットパネル検出器をROI及び/又は試験または検査領域に近づけたり遠ざけたりするための電源及び/又は制御回路、機械的機構をさらに含んでもよい。タイミング及び制御回路は、試験領域の周囲でインナーレースをインデックスするモータ、検査領域の周囲の選択された位置で直列ステップでX線管をパルスするX線電源、及びX線管の各パルスの後にデータのフレームを読み出す読み出し回路を制御することが可能である。読み出されたデータのフレームは、フレームメモリに格納され、再構成プロセッサによってボリュームイメージメモリに格納するためのボリュームイメージ表現に再構成され得る。プロセッサは、データ又は2次元提示フレームメモリ又はイメージメモリ又はボリュームイメージメモリからのボリュームイメージ表現の選択部分を、モニタに表示するための適切なフォーマットに抽出することができる。視野又は関心領域は、検査領域及びROIに向かい及び遠ざかるコリメータの調整及び/又はフラットプレート検出器の移動及び/又はX線管の移動の調整を行うことができる。
X線源の照射線と物体から出るX線は、検出器によって収集され得る。本システムは、X線放出位置を移動させるための電磁操向器及び/又はモータなどの移動機構、フラットパネル検出器をROI及び/又は試験または検査領域に近づけたり遠ざけたりするための電源及び/又は制御回路、機械的機構をさらに含んでもよい。タイミング及び制御回路は、試験領域の周囲でインナーレースをインデックスするモータ、検査領域の周囲の選択された位置で直列ステップでX線管をパルスするX線電源、及びX線管の各パルスの後にデータのフレームを読み出す読み出し回路を制御することが可能である。読み出されたデータのフレームは、フレームメモリに格納され、再構成プロセッサによってボリュームイメージメモリに格納するためのボリュームイメージ表現に再構成され得る。プロセッサは、データ又は2次元提示フレームメモリ又はイメージメモリ又はボリュームイメージメモリからのボリュームイメージ表現の選択部分を、モニタに表示するための適切なフォーマットに抽出することができる。視野又は関心領域は、検査領域及びROIに向かい及び遠ざかるコリメータの調整及び/又はフラットプレート検出器の移動及び/又はX線管の移動の調整を行うことができる。
図30は、各検出器に個別のビーム粒子ストッパープレートを使用した複数検出器イメージングシステムを示す。1つの検出器のイメージは、ROIの選択及び/又は第2検出器によって測定されるROIの選択に役立つことができる。
図30のシステムは、検出器の上部にビーム粒子ストッパープレートを含む。第1検出器22は、大型の検出器であってもよく、第2検出器23は、異なるサイズの検出器であってもよい。ビーム粒子ストッパープレート100は、各検出器の上方に配置されてもよい。検出器のビーム粒子ストッパーは、互いに異なるものであってもよいし、同一個であってもよい。
ビーム粒子ストッパーのための移動体は、スピナーであってもよく、ビーム粒子ストッパープレートは、検出器の上部を回転する円板である。
一実施例では、移動体は、第2検出器23を移動させるアクチュエータ900であってもよく、検出器23の底面に取り付けるのではなく、検出器23の1面または2面に取り付けてもよい。
ビーム粒子ストッパー100は、検出器の寸法が小さい場合、必要でない場合がある。
例えば、X線源に近い開口部を持つテーパーコリメータは、小さいか、またはより大きな源からより遠く離れて、幾何学的に小さい焦点スポット12fsを生成することができる。
生成されたコーンビーム又は生成されたビーム体積は、本来のX線源によって照射され得る体積よりも、イメージ化された対象内のより小さな体積を照射することができる。X線ビーム又は一次X線は、対象を照射し、サンプルホルダ40を通過して、検出器ガントリーに含まれる検出器アセンブリ22に到達し、これは、併進ステージとともに対象2上の異なる関心領域へ移動されるであろう。X線源12は、照射する対象物をターゲットとしてX線源12を移動させるための構造体、および併進ステージに取り付けられる。
コリメータは、X線管ハウジング、あるいはX線管及びハウジングを所定の位置に保持するハードウェアに、取り付けられてもよく、又はコリメータと線源12との間に、例えばフィルタ及び/又はシャッターが取り付けられた標準的なコリメータが存在してもよい。コリメータ又は追加のコリメータは、関心領域又は関心体積を選択するために使用されてもよい。そして、コリメータは、フィルタとハードウェア及び/又はシャッターを有する従来のコリメータと組み合わされてもよく、必要なときに所定の位置に移動されてもよい。この移動および設計は、シャッターまたはフィルタに使用されるものと同様であってもよい。
構造ハードウェア125及び支持ハードウェア130は、線源12及び検出器及びその組立品を所定位置に保持し、機械的支持及び安定性を与えることができる。車輪108は、可搬性のために使用することができ、格納可能であってもよい。
X線ビーム集束機構は、コリメータである代わりに、他の機械的又はエネルギー又は光学ベースの機構、例えば、MEMベース又はグレーチングベースのオプティクス、又はゾーンプレート又は他のX線集束オプティクスであってもよい。場合によっては、ビーム開口が使用されてもよい。また、ブラッグ回折を利用して集光するラウエレンズ(通常、傾斜結晶を使用)を使用することもできる。また、集光素子として多層膜ラウエレンズ(MLL)を使用することもある。
場合によっては、適切なX線位相板を経路に入れることで、回折限界の集束を達成することができる。位相板は、透過で動作し、屈折に基づくものである。したがって、位相板は、μmの範囲の小さな形状および表面の不正確さにほとんど影響を受けず、反射光学系の表面誤差、回折光学系のゾーン変形、および大きな屈折レンズスタックの累積表面誤差に由来する残留収差を補正することができる。
検出器22は、ビームセレクタまたはビーム粒子ストッパープレート100またはビーム粒子ストッパー22bを有する検出器アセンブリの一部であってよい。そして、サンプルホルダ40又は患者テーブル40の下方に2つ以上の検出器が存在してもよい。
X線管、ハウジングアセンブリ及び/又はコリメータを含んでもよいコリメータアセンブリを含む第2又は第3の線源アセンブリが、支持体120に搭載されてもよい。第2線源は、選択された関心領域及び/又は類似のイメージ対象2を照射するために移動されてもよい。第2線源アセンブリは、支持体120及び125とは異なる構造によって支持された別の構造に取り付けられてもよい。
電子集束レンズは、従来のX線管において、より小さなX線焦点位置を持つように電子ビームを集束させることができる。
X線システムは、放射線レベルが高くなった、ハードウェアシステムまたはソフトウェアシステムの誤動作など、X線システムに関連するイベントによってトリガーされる警告またはアラートのための1つ以上のLEDディスプレイを含むことができる。X線システムは、1つまたは複数の緊急ボタンを含むことができる。ユーザーは、システムを停止するために押すか、または他の機械的な機構を使用することができる。ボタンは、明るい色または任意の色であってよく、かつ/または視覚的に発見しやすいものであってよい。
X線システム制御部は、発電機をスタンバイモードから引き出すためのマスター電力制御を含んでもよい。
図32は、ホログラフィックX線システムの例を示す。線源12は、X線(いくつかの場合では干渉X線)を放出することができる。X線は、X線ビームスプリッタなどの要素2000に到達し、2つのビームを生成する。一方のビーム32は、サンプル又はイメージされた対象2を通過することができ、第2のビーム38は、基準アームとして機能することができる。ゾーンプレートのような集束要素があってもよいし、なくてもよい。試料の前にピンホール2002、またはビーム開口部があってもよい。イメージされた対象2は、ビームスプリッタ2000、集束レンズ2003の下流、および対物レンズ2004の上流に配置される。場合によっては、そのような対物レンズは必要ない。一方、参照ビーム38は、X線ミラーなどのX線光学系2001によって操縦され、別のビームカプラーまたはコンバイナー要素2005で結合されることになる。干渉パターンは、検出器2020上に形成される。32のビーム幅に応じて、ビーム粒子ストッパープレート100があってもよいし、散乱を除去するためになくてもよい。
場合によっては、検出器2020の代わりに、デュアル検出器及びビーム選択器アセンブリが使用されてもよい。対物レンズ2004と被撮像体2との間にシンチレータ又はイメージインテンシファイアがあってもよいし、検出器2020の前にシンチレータがあってもよく、これは光学カメラであってもよい。また、ミラー2001とビーム合波素子2005の間にピンホールが配置されていてもよい。干渉パターンは、イメージされた対象を通過するX線波面の位相情報を導出するために、フーリエ変換及び/又は解析することができる。光波長におけるホログラフィックイメージング又は顕微鏡の再構成及び解析方法及びアルゴリズムが同様に適用され得る。このようなイメージングシステム又は位相イメージングシステムは、スペクトル、又は3D又は散乱除去システム及び方法など、前述のX線イメージングシステムを用いて選択された関心領域を測定するために使用されてもよい。
説明したようなX線を用いた位相イメージングにより、透過X線イメージングモダリティに加えて、イメージングされた物体2の分析のための情報の別の層が提供されるであろう。
位相及び/又は時間的な透過イメージのホログラフィックX線イメージングが導出されることがある。
X線イメージングにおける様々なハードウェア要素、サブモジュール、及びコントローラー並びに表示及び制御ユニットの距離、幾何学的又は相対的な空間位置を検知するためのセンサー要素が、X線管の近くに取り付けられてもよい。
X線管ハウジング又はX線管の下に取り付けられた別のコリメータにテーパーコリメータを取り付けるために、モータ及びアタッチメントが使用されてもよい。
アタッチメントハードウェアは、線源とVOIとの間の経路のラインの中と外との間でテーパーコリメータを移動させるために、移動機またはロボットアームによってモータ駆動または調整されてもよい。
テーパーコリメータは、焦点距離を短くするために使用されることがある。テーパーコリメータは、関心領域を制限するために使用されることがある。テーパーコリメータは、露光時間を調整するための開口部の開閉を可能にする、シャッターに似た設計を持つ従来のコリメータを使用することができる。場合によって、テーパーコリメータは、ビーム減衰器の層の重なりを有してよく、各層はその上の層よりわずかに大きな開口を持ち、テーパー状の透過孔を形成している。
センサー要素は、X線管用移動体に取り付けられてもよいし、あるいはX線管に取り付けられてもよいし、あるいは、X線管12及び/または検出器22及び/または、保持構造体または移動体またはX線源12または検出器22のいずれかを含むサブモジュール、または検出器22、ビーム粒子ストッパー又はビーム粒子ストッパープレート100又はビームセレクタ又は対象2をイメージングするための1つ又は複数の他の検出器のいずれかを含む検出器モジュール、とは別の空間的位置に配置されてもよい。
センサー要素は、光学センサー又は飛行時間センサー又はカメラ又はlidar装置であってよく、X線源及び検出器に対する寸法又は幾何学的又は空間的位置、並びにVOI又はROI又はイメージされた対象の厚さを測定することができる。厚さの測定は、それによってコリメータシャッターの制御、VOI又はROIに対するX線源及び/又は検出器の位置合わせ、又はVOIの3Dイメージの完全な再構成に必要な投影イメージ又は測定値の数を決定するための投与量又は露出時間の決定に使用され得る。
X線ビームは円錐形であるため、X線源に最も近い関心領域は、検出器に最も近い関心領域より小さい場合がある。あるいは、X線源に近い関心領域からボクセルまたはボクセルを照射するX線は、測定時に検出器上のより大きな領域に投影されることがある。例えば、関心領域ROItotal(x、y)は、線源に最も近い対象表面から、センサー及び/又はカメラまで拡大した体積を含むことができる。
飛行時間センサー(TOF)のような1つ以上のセンサーは、断層撮影のために撮影されるべきイメージの数を決定するために、物体の厚さを測定するために使用されてもよい。
センサーは、各イメージ又はROIの各測定に必要な露出を推定するために使用されてもよい。
センサーは、X線放出位置及び/又は検出器の移動及び/又は位置合わせを決定し導くために使用されてもよく、例えば、ROIが撮影経路にあり、適切に位置合わせされるようにX線源及び検出器の両方を移動させる。
<放射線不透過性マーカー>
放射線感応性又は放射線不透過性マーカー及び/又は光学マーカー又は反射器は、X線照射経路内及び/又は経路外の異なる領域に配置可能であり、イメージングハードウェアを適切に整列させるための参照点として使用され、また、改善された更に正確な空間的位置決めによるイメージ再構成のためにも使用される。
放射線感応性又は放射線不透過性マーカー及び/又は光学マーカー又は反射器は、X線照射経路内及び/又は経路外の異なる領域に配置可能であり、イメージングハードウェアを適切に整列させるための参照点として使用され、また、改善された更に正確な空間的位置決めによるイメージ再構成のためにも使用される。
X線イメージングシステムは、およそ1つ以上のX線放出位置に、変化した焦点サイズ、及び/又は準備時間、露出、速度、パワー、エネルギーレベル、エネルギーレベルの数、スペクトル波形特性、パルス期間、パルス特性及び/又はフォームファクタなどのパラメータにおいて変化した他の値を有する1、2又は複数のX線源又はデュアル以上の線源を含むことが可能である。X線検出器の上流または下流に移動可能な1つまたは複数の検出器を有するX線イメージングシステム。検出器は、空間分解能、速度、スペクトル値に対する感度、1つ又は2つ又は複数の波長又は異なるエネルギーレベルに対する感度、プログラム可能性、ダイナミックレンジ、光子感度、量子効率、スペクトル感度又はハードウェア設計及び他の検出器を区別し得る他の特性において互いに同一又は異なってもよい。
例えば、第1検出システムは、ビームストッパー粒子プレート100と対象の間に配置可能である。そして、第2検出器は、ビームストッパー粒子プレートより下流に配置可能である。第1検出システムは、点検出器であってもよいし、線形検出器、2次元検出器、又は分光器であってもよい。
別の実施例では、X線源と第1検出システムとの間に、ビームストッパー粒子プレートが存在しない。これは、第2検出器又は検出器システムが上流にビームストッパー粒子プレートを有する場合があるため、第2検出器上の散乱信号は、第2検出器上の低解像度散乱測定値から補間されることが可能である。その結果、第2検出器上の高分解能一次X線が導出される。第1検出器の対応する位置上の一次信号は、異なる関心材料を用いて様々な厚みで第2検出器上の一次信号に相関するので、各材料は、対象、又は関心領域若しくは構成要素の材料分解のために選択された各エネルギーレベルの細線ビームによって較正され得る。第1検出器上の低分解能及び高分解能の散乱信号を計算し、導出することができる。最終ステップでは、合成測定信号から高分解能散乱を差し引くことで、第1検出器の一次信号を導出することができる。そのため、第1検出器の上流にあるビームストッパー粒子プレートは不要である。
特定の位置における1つ又は2つの又は一組のエネルギーレベルにおける一次信号は、特定の密度及び厚さを有する特定の組織の導出値、又は基準データベースからのシミュレーション値又は測定データに対応することができる。基準データベースは、第1及び第2の検出器の両方における2つ以上のエネルギーレベルのそれぞれにおける2つ以上の材料の複数の非国際単位(imperical)測定によって確立することができる。密度および厚さデータは、各データポイントにおける各エネルギーでの6つ以上の対応する測定データの補間により導出することができる。各材料について測定回数を増やすと、設定されたエネルギーレベルにおいて、予測値が実測値から0.5%ずれない場合がある。その結果、様々なエネルギーレベルの設定値における残りの値を補間して、参照データベースに格納することができる。第1検出器及び第2検出器はそれぞれ、様々なエネルギーレベルにおいて特定の物質に対して異なる検出器応答関数を有していてもよい。本開示は、このような方法を、3つ以上の材料に対応する3つ以上のエネルギーレベルまで拡張する。
対象物の関心領域における個々のコンポーネント、例えば、骨と軟組織を含む体内の個々の組織または物体、あるいは、それぞれが異なる原子z番号または少なくとも1つのX線測定可能な特性の異なる値を有する少なくとも2つのコンポーネント、のより良い可視化及び定量化のための方法が提供される。
X線イメージにおける第2コンポーネント又は組織からのイメージの干渉は、異なるコンポーネント又はコンポーネントのイメージから除去され得る。例えば、本開示は、その重なった軟組織X線投影イメージ上の骨の干渉を除去することができる。この方法は、2次元デュアルエネルギーまたはトリプルエネルギーまたはマルチプルエネルギー、スペクトルX線イメージングハードウェアシステムとも呼ばれるものの使用に基づくことができる。1つの好ましい実施例では、デュアルエネルギーシステムX線イメージングシステムが使用される場合、方法の本開示は、3つの手順を含むことができる。
(A)デュアルエネルギーX線イメージングハードウェアシステムを介して、骨構造によって重なり合った関心軟組織を含む対象について、高エネルギーレベルH、及び低エネルギーレベルLでのデュアルエネルギーイメージのペアを取得するステップ。
(B)デュアルエネルギー分解法を用いて、取得したデュアルエネルギーX線イメージペアデータを2つの物質組成イメージ:人体軟組織イメージと骨イメージに変換することである。これは、所望のイメージ情報が存在する軟組織イメージに課される骨イメージの直接的な干渉を除去するためである。
(C)軟組織内部で元々骨が占めていた空間による骨との関連での間接的な干渉効果を補償する。補償方法は、2つのステップを含むことができる。
(1)元々分解された骨イメージを骨に等価な軟組織イメージに置き換える。
(2)元々分解された骨イメージが位置する正確な幾何学的位置において、骨に等価な軟組織イメージを元々分解された軟組織イメージに再インストールする。
(A)デュアルエネルギーX線イメージングハードウェアシステムを介して、骨構造によって重なり合った関心軟組織を含む対象について、高エネルギーレベルH、及び低エネルギーレベルLでのデュアルエネルギーイメージのペアを取得するステップ。
(B)デュアルエネルギー分解法を用いて、取得したデュアルエネルギーX線イメージペアデータを2つの物質組成イメージ:人体軟組織イメージと骨イメージに変換することである。これは、所望のイメージ情報が存在する軟組織イメージに課される骨イメージの直接的な干渉を除去するためである。
(C)軟組織内部で元々骨が占めていた空間による骨との関連での間接的な干渉効果を補償する。補償方法は、2つのステップを含むことができる。
(1)元々分解された骨イメージを骨に等価な軟組織イメージに置き換える。
(2)元々分解された骨イメージが位置する正確な幾何学的位置において、骨に等価な軟組織イメージを元々分解された軟組織イメージに再インストールする。
本明細書に開示される装置及び方法は、軟質材料、又は軟質媒体、又は軟組織イメージングのX線イメージングを改善することができる。
X線システムは、例えば、一般的なX線システム、又はCTスキャナ、又はCTスキャナとは異なる3D又は多次元X線システム、又はビームセレクタ又はビーム粒子ストッパープレートを含む散乱除去装置及び方法を有するX線システム、及び/又はスペクトル測定、又は多次元イメージング、又はスペクトルイメージング又は点、1D、2D及び3Dトラッキングが可能であることができ、車輪などの移動機構、時には自己駆動又は遠隔制御移動能力を備えた移動又は携帯システムと一体化又は取り付けられることがある。このようなシステムは、例えば約35インチの幅と6フィートと8フィートの高さのドア、または医療用ドア、または救急室ドア、患者用ドアまたは医療室ドアまたは手術室ドアを通してフィットするのに十分コンパクトである場合がある。
本明細書に開示されたシステム及び方法は、例えばテーパ付きコリメータ構造、又は集束光学系若しくは電磁集束レンズを介してX線放射領域の焦点スポットを減少させることによってX線測定の分解能を向上させることができる。
X線測定は、組織の異なる部分における処置中に造影剤又は造影剤を含む溶液の透過性を測定するために行われることがある。手順は、エネルギー治療又は生検、又は他の治療法若しくは薬物送達法のものであってよい。造影剤溶液の液体をROIに吸引するための毛細管などの造影剤吸引機能を有するカテーテルを使用することができる。経時的な測定は、一度にあるいは経時的に診断のための透過性を測定し区別するために使用されてもよく、介入前、介入中、介入後の透過性を測定するために使用されてもよい。
X線露出測定は、X線光学系、シンチレータ、またはシンチレータなしで結合されたX線または光学波長のセンサーを使用して、X線がイメージされる対象に達する前に、センサーで行われる。
X線システム及び関連する断層撮影システム又は関連する散乱除去システムは、銅コーティング又は銀コーティングされるなど、病原体の堆積に対する耐性、又は病原体の寿命の短縮、又は病原体の保持に対する耐性を有していてもよい。
X線システムは、1台の機械に2つ以上の構成を持つことができる。例えば、1つは輸送用、1つは操作用、1つは保管用、又は1つは脊椎イメージングなどの1つのアプリケーション用、もう1つは心臓血管又は骨盤イメージングなどの別のアプリケーション用に、X線管又は検出器の高さや進行距離、X線管と検出器の間の距離、部品の選択及び構造における変動や調整可能性を伴って使用されてもよい。折り畳まれた構造は、イメージング以外の目的のために、または複数のイメージング操作の間に、またはイメージング操作中に、または処置の間に、一時的なものであってもよい。
システムはまた、密度測定、寸法、形状、パターン、または1Dから7D次元、7Dは時間マーカーを有する6D、またはアプリケーションのニーズに応じてカスタマイズされた多様な解像度などの数値フォーマットで、nマトリックスおよび関連するデータプレゼンテーションを使用して、最適化されたイメージ取得および処理および提示方法に関する設定を有することができる。
X線源は、従来のX線源、または、冷陰極、フィールドエミッタ源、飛行時間、線形加速器ベース、または液体金属ジェットまたは光ベースであってもよい。
波長、フレームレート、解像度、感度、エネルギー感度、品質などのハードウェア的制限を受けるX線システムの能力を拡張するために、システム構成は、従来のホットフィラメントベースの管とともに、ナノチューブまたはフィールドエミッターベースの管のような新しいハードウェアの使用に対応することができる。一例として、選択したX線管および/または対応する検出器を移動させて、測定のための位置を最適化するために使用することができる。2回目の測定は、同じ検出器を使用し、異なるX線管を同じX線放出位置に移動して行うことができる。X線管と検出器のペアは、Cアームなどのように一緒に移動させてもよいし、あるいは独立して移動させてもよい。また、第1イメージ位置の代わりに異なる検出器を用いてもよいし、同一対象物及び/又はROI上の異なる空間位置を用いてもよい。
エネルギーに基づく介入や光学分光法又は温度センサー測定などの測定ツールなどの他の測定モダリティや治療及び診断処置は、選択されたROIをさらに照会したり、あるいは介入処置を展開するために使用されてもよい。
様々な介入処置の設計は、原子z、減衰係数、厚さなどの差異可能なX線測定特性を有することによって最適化されてもよく、またはよりよく可視化され、およびX線ガイド処置または測定方法に対し応答される。
2D又は3Dの高速又はリアルタイムトラッキング、例えば1秒未満又は100ms未満又は10ms未満又は1ms未満の2D、3D、又は時間的に6Dトラッキングなどの最大7D、又は3D又は6Dフルオロ(fluoro)での動的トラッキングで、処置全体において約2倍少ない放射線の露出量とする。処置中の放射線量が5倍、10倍、25倍、および/または100倍、1000倍、又は10000倍、又は100000倍、又は約1000000倍の少ない放射線量を、ROI及び/又はROIを含む対象に照射することにより、これまでの総放射線量とほぼ同様のイメージ目標を達成することができるが、特定の領域に対する被曝は少なく、又は総放射線量ははるかに少なくなる。これは、点、または複数の点、1つの領域、または複数の領域、1D、2D、3D、最大6Dで時間的に測定することによって達成され得る。測定の各完全なサイクルは、1秒未満または30秒未満、および/または測定または処置の異なる時間におけるアプリケーションに必要な解像度を選択的に選択することである。
選択されたROIのイメージングに基づく診断は、医療クリニックにおける従来のCTシステムと同等以上の分解能を、例えばz方向に沿って、従来のCTスキャナに要する時間と同等かそれ以下で、及び/又は従来のCTスキャナシステムと比較して約2倍、3倍、4倍、5倍、10倍、100倍0又は1000倍、10万倍又は1000万倍少ない放射線量により、得ることができる。
2つ以上のエネルギーレベルにおけるピクセル毎の検出器測定値又は白イメージ上の検出器測定値は、既知の物理的特性を有する材料のサンプルについて捕捉することができる。これは、各ピクセルの検出器測定値が、ある密度及び厚さを有する2つ以上の材料の減衰又は透過と一意に相関するエネルギー応答関数システムの補間及び確立を可能にすることができる。少なくとも1つの材料又は物質は、ビームハードニング効果の補正を伴う線形化近似法を用いてデュアルエネルギー一次X線イメージング方程式系を解くことにより、デュアル又は複数のエネルギー測定を使用して残りの部分から分離することができる。物質分解はまた、ビームハードニング効果の補正を伴うエネルギー応答関数方程式系を解くために反復することができるデュアルエネルギー分解法に基づいて行うことができる。エネルギー応答関数方程式系を解くために使用される複数のエネルギーにおける測定値は、正規化され、及び/又は信号が減算され、及び/又はスプリアス(spurious)フィルタ信号が適用され、及び/又は欠陥ピクセルが識別されて隣接ピクセル測定又は同じピクセル位置の異なる時間での測定と置き換えられる場合がある。
本明細書に開示される断層撮影は、完全な体積データn2断層撮影又は3D測定の構築を含むことができる。
イメージは、例えばモータ駆動ステージ又は電磁機構又はソレノイドコイルによって移動する、多数のX線放出位置で撮影可能である。放出位置は、検出器又は線源ペア中心軸にほぼ垂直又は軸方向であるz軸において、所望のほぼ分解能Xcだけ間隔をあけて配置される。イメージの数は、z軸の解像度Xcにかかる試料の厚さPによっておおよそ決定することができる。X線位置は、z軸に垂直なxy平面内、またはxyz体積内、または線形であることができる。体積内のボクセルのより正確な測定を導き出すために、同じ進行エリアまたは体積内の位置を放射することによって、追加の測定を行うことができる。
中心位置でVOIを通過する検出器の中心軸に対するX線放出位置の総移動は、10度未満、または5度未満、または4度未満、または3度未満、または2度未満、または1度未満であってもよい。
本明細書に開示されるX線イメージングシステムは、以下のうちの1つ又は複数を含むことができる。
発電機、
コントローラーに埋め込まれていてもいなくてもよいデジタルスイッチ、
コントローラーに内蔵されていてもいなくてもよいマイクロプロセッサに格納されたシンプログラム、
X線検出器イメージ取得またはシャッター開放時間を、デジタル的にスイッチオンされる発電機と同期させる、少なくとも1つのマイクロプロセッサを有する少なくとも1つのコントローラー、コントローラーは、システム内にローカルに存在してもしなくてもよく、あるいは、少なくとも1つのディスプレイシステムと接続されたコンピュータに存在してもよい。
X線管または1つ以上の検出器を移動させるための少なくとも1つのモーションシステム。
コントローラーは、モーションシステム及び/又は他の発電機を制御してもよい。
データベースを有する又は有しない少なくとも1つのメモリストレージのハードウェア及びソフトウェア、
メモリストレージを有するマイクロプロセッサ、
コントローラーを制御するための少なくとも1つのマイクロプロセッサ、
ワイヤレスまたは有線で接続された少なくとも1つのディスプレイと接続された少なくとも1つのマイクロプロセッサ、
ビーム粒子ストッパープレート及び関連するモーションシステムなどの散乱物除去ハードウェア、
散乱体除去ハードウェアに使用されるモーションシステム、
散乱体除去を含むイメージ処理に使用されるソフトウェア、
材料分解、密度、厚み導出、及び/又は補間アルゴリズム及びプログラム、及び/又はイメージ再構成を含むイメージ処理に使用されるソフトウェア、
電磁操向器の制御に使用されるソフトウェア、
3D取得のためのモーションシステムの制御に使用されるソフトウェア、
ROIをイメージ化するために1つ又はそれ以上の線源を移動させるのに使用されるソフトウェア、
ROIを照らす1つ又はそれ以上の線源を制御するためのソフトウェア、
発電機、
コントローラーに埋め込まれていてもいなくてもよいデジタルスイッチ、
コントローラーに内蔵されていてもいなくてもよいマイクロプロセッサに格納されたシンプログラム、
X線検出器イメージ取得またはシャッター開放時間を、デジタル的にスイッチオンされる発電機と同期させる、少なくとも1つのマイクロプロセッサを有する少なくとも1つのコントローラー、コントローラーは、システム内にローカルに存在してもしなくてもよく、あるいは、少なくとも1つのディスプレイシステムと接続されたコンピュータに存在してもよい。
X線管または1つ以上の検出器を移動させるための少なくとも1つのモーションシステム。
コントローラーは、モーションシステム及び/又は他の発電機を制御してもよい。
データベースを有する又は有しない少なくとも1つのメモリストレージのハードウェア及びソフトウェア、
メモリストレージを有するマイクロプロセッサ、
コントローラーを制御するための少なくとも1つのマイクロプロセッサ、
ワイヤレスまたは有線で接続された少なくとも1つのディスプレイと接続された少なくとも1つのマイクロプロセッサ、
ビーム粒子ストッパープレート及び関連するモーションシステムなどの散乱物除去ハードウェア、
散乱体除去ハードウェアに使用されるモーションシステム、
散乱体除去を含むイメージ処理に使用されるソフトウェア、
材料分解、密度、厚み導出、及び/又は補間アルゴリズム及びプログラム、及び/又はイメージ再構成を含むイメージ処理に使用されるソフトウェア、
電磁操向器の制御に使用されるソフトウェア、
3D取得のためのモーションシステムの制御に使用されるソフトウェア、
ROIをイメージ化するために1つ又はそれ以上の線源を移動させるのに使用されるソフトウェア、
ROIを照らす1つ又はそれ以上の線源を制御するためのソフトウェア、
イメージ取得プロセス中の同期のためのソフトウェアまたは電子回路であって、以下のうちの1つまたは複数を含むことができるもの。
- 高電圧発生装置、例えば、0~500KeV
o 高電圧電源、低電圧ドライバ、電子エミッタ
o スイッチ、低電圧電源及び高電圧変圧器などのエレクトントリガー回路を有する高電圧コンデンサー
o 高電圧X線発生器1フレームあたりus(マイクロ秒)から1s(1秒)まで。
- 高電圧発生装置、例えば、0~500KeV
o 高電圧電源、低電圧ドライバ、電子エミッタ
o スイッチ、低電圧電源及び高電圧変圧器などのエレクトントリガー回路を有する高電圧コンデンサー
o 高電圧X線発生器1フレームあたりus(マイクロ秒)から1s(1秒)まで。
ナノ秒~マイクロ秒~ミリ秒~1秒のパルス電子エミッタであって、冷陰極、電界放射体、またはホットフィラメント、従来のX線管であってもよい。
- 低電圧ドライバを制御することによってオンとオフを切り替えることによる1つ以上のパルス生成のための、デジタルスイッチであってもよいスイッチングユニット、または、発電機を1つ以上の所望の電圧にランプアップ(ramp-up)するための、および発電機を1つ以上の所望の電圧に調整しゼロに戻すためのトリガー回路。
- スイッチと通信する少なくとも1つのコントローラーC1
- C1を制御するための信号を同期させるためのタイマーおよび/またはシンクロナイザー、および高電圧発生器および/または測定用の検出器シャッターおよび/または検出器のシャッターを制御するためのシャッターコントローラ、例えば以下のものを制御するためのもの。
o X線エミッタのマスタークロック周波数と検出器のシャッターの開度を位相ロックすること。
o 一定の時間間隔で生成される一連の信号と固定されたシャッターとパルス持続時間を含むシャッター信号。
o 光によってモニタされるX線源からの電子信号。マイクロ秒またはマイクロ秒のX線バーストは、シャッターパルスによるパルストリガーに動作可能なトリガーシャッターによって捕捉され得る。X線検出器のシャッター動作は、X線源または電子エミッタのトリガー回路のマスターロックまたは高電圧発生器で位相ロック可能である。
o X線エミッタのマスタークロック周波数と検出器のシャッターの開度を位相ロックすること。
o 一定の時間間隔で生成される一連の信号と固定されたシャッターとパルス持続時間を含むシャッター信号。
o 光によってモニタされるX線源からの電子信号。マイクロ秒またはマイクロ秒のX線バーストは、シャッターパルスによるパルストリガーに動作可能なトリガーシャッターによって捕捉され得る。X線検出器のシャッター動作は、X線源または電子エミッタのトリガー回路のマスターロックまたは高電圧発生器で位相ロック可能である。
さらに、同期は、以下のものを制御するためのソフトウェア同期およびプロセスを含むことができる。
- ROIをイメージするためにX線管及び/又は検出器を移動させるためのモーションシステム
- 一例において、関心領域を選択するための少なくとも一つのコリメータ、及び/又は少なくとも一つのフィルタ、及び/又はシャッターを制御すること
- X線放出位置の制御
- 電磁石操向器などの電子ビーム操向器制御
- ROIをイメージするためにX線管及び/又は検出器を移動させるためのモーションシステム
- 一例において、関心領域を選択するための少なくとも一つのコリメータ、及び/又は少なくとも一つのフィルタ、及び/又はシャッターを制御すること
- X線放出位置の制御
- 電磁石操向器などの電子ビーム操向器制御
システムは、例えば、検出器シャッター開閉、デジタルスイッチ、低電圧パルス発生器、低電圧回路、高電圧保存装置、高電圧増幅器、高電圧アプリケータ、フィールドエミッタの制御による、一つ以上の電磁操向器の位置、周波数、パワーを含む操向活動などの一つ以上の補助ハードウェアも含むことができる。
システムは、イメージ処理及び/又はイメージ保存及び/又はイメージ転送及び/又はイメージバッファリング、通信ソフトウェアを実行することができる。
補助ハードウェアは、以下のうちの1つ又は複数を更に含むことができる。
- ROIから線源までの寸法又は距離の測定に使用されてもよい少なくとも1つの飛行時間センサー、及び線源から検出器までの距離から差し引かれ、ROIの厚さが導出されるセンサー。センサデータは、X線多次元イメージ再構成のためのX線放出位置移動のために、何枚のイメージ、したがって何ステップが必要であるかを決定するために使用されてもよい。また、厚みなどのセンサーからの測定データは、補間プロットや逆エネルギー応答関数システムを使用する際に、各個別コンポーネントや物質の厚みや密度を決定するために使用することも可能である。
- 関心領域の厚さ、寸法、又はジオメトリ等の少なくとも1つの物理的パラメータ測定のための患者の測定又はイメージ対象物の視覚的提示のため、及び/又は、X線システムの遠隔制御又は操作及び/又は患者との対話及び/又はイメージされた物体の制御のための、少なくとも1つのカメラ
- 放出されたX線強度又はリアルタイムの被曝量又は投与量を測定するための少なくとも1つのセンサー
- ジオメトリ測定のための少なくとも1つのセンサー、及び/又は
- X線システム又はX線システムの少なくとも1つ以上の部分の位置及び/又は1つ以上の基準物体に対する(それらの)相対位置を測定するための少なくとも1つのカメラ。
- ROIから線源までの寸法又は距離の測定に使用されてもよい少なくとも1つの飛行時間センサー、及び線源から検出器までの距離から差し引かれ、ROIの厚さが導出されるセンサー。センサデータは、X線多次元イメージ再構成のためのX線放出位置移動のために、何枚のイメージ、したがって何ステップが必要であるかを決定するために使用されてもよい。また、厚みなどのセンサーからの測定データは、補間プロットや逆エネルギー応答関数システムを使用する際に、各個別コンポーネントや物質の厚みや密度を決定するために使用することも可能である。
- 関心領域の厚さ、寸法、又はジオメトリ等の少なくとも1つの物理的パラメータ測定のための患者の測定又はイメージ対象物の視覚的提示のため、及び/又は、X線システムの遠隔制御又は操作及び/又は患者との対話及び/又はイメージされた物体の制御のための、少なくとも1つのカメラ
- 放出されたX線強度又はリアルタイムの被曝量又は投与量を測定するための少なくとも1つのセンサー
- ジオメトリ測定のための少なくとも1つのセンサー、及び/又は
- X線システム又はX線システムの少なくとも1つ以上の部分の位置及び/又は1つ以上の基準物体に対する(それらの)相対位置を測定するための少なくとも1つのカメラ。
補助ハードウェアは、特定のフレーズを伴う音又は音声などの聴覚インジケータ、又はLEDディスプレイ上のテキスト又はグラフィックなどの視覚インジケータ、又は膜ディスプレイ上のオン及びオフスイッチ、又はLEDライトのオン及びオフスイッチ、ディスプレイのオン又はオフなどの光学インジケータ、複数スイッチ、オン又はオフする複数ディスプレイ、コンピュータディスプレイ上のデジタル信号、スイッチ、電源のオンとオフ、または一般的にイメージ取得プロセスで使用されないかもしれないがサポート機能として機能することができる他の一般的に使用されるハードウェア、またはリモート通信、有線通信、デジタルと電気または光通信、自動保存、イメージングシステム内の任意の他のハードウェアとソフトウェア、を含むインジケータをさらに含んでもよい。
ソフトウェアは、イメージ取得及び手続きのためにユーザインタフェースと相互作用することができる。
視覚的提示は、測定値、数字でのデジタル表示、テキスト表示、温度またはハードウェア保守ソフトウェアによって引き起こされる警告信号、および故障トリガー、ソフトウェア故障、ハードウェアトリガーなどを含むことができる。
X線イメージシステムと統合またはハイブリッド化することができるための追加システムを制御することができ、以下を含む。
エネルギー処理装置、
光学イメージング又は測定システム、光音響システム、超音波システムのような異なるイメージングモダリティ又は測定装置、
マニピュレータ、
手術用具のプローブ、
放射線治療装置、
生検装置及びそのプローブの動き、
ロボット型プローブ及びシステム、
カテーテル及び/又はガイドワイヤ、及び/又はその他の低侵襲手術用器具。
エネルギー処理装置、
光学イメージング又は測定システム、光音響システム、超音波システムのような異なるイメージングモダリティ又は測定装置、
マニピュレータ、
手術用具のプローブ、
放射線治療装置、
生検装置及びそのプローブの動き、
ロボット型プローブ及びシステム、
カテーテル及び/又はガイドワイヤ、及び/又はその他の低侵襲手術用器具。
本明細書に開示されるマルチスペクトルX線源は、切り替え可能なX線放出システムを含むことができ、ここで、高電圧発生器は、時間と共に関数として変化するように構成及び動作可能であり、切り替えは、電子が必要な加速電圧で放出されるように選択された時間におけるms範囲の短パルスの発生を駆動して、それによって身体のイメージングに適した、理想的には0~500KeV間の必要電圧でX線を放出させる電子回路のトリガーとなることが可能である。
検出器による取得(または繰り返される取得)を同期させるマスタークロックがあってもよい。マスタークロックの動作は、以下の可能性を含んでもよい。
1. 内部タイミングによる検出器連続動作モード。制御メッセージまたは信号を受信すると、検出器はその内部タイミングで動作する。検出器のイメージ取得を、X線の放出、または発生器、および/または運動システムなどのX線放出位置移動装置、または電子操向装置および/または発生器の動作と同期させるマスタークロックが存在してもよい。内部トリガーは、線源用のモーションシステム、線源および検出器用の移動体など、他のハードウェアを制御するためにコントローラーを起動することができる。
2. 検出器は、発生器からの信号、外部同期して連続動作モードにされてもよい。または、X線放出位置用移動体は、同期して動作し、検出器が特定間隔でイメージを取得し続ける間、露出させるよう操作してもよい。例えば、各露光が100msである場合、発生器は、X線管が一定時間静止しているときに、例えば移動体と同期して正確にX線を生成してもよく、またはX線管は、各位置でドウェルタイム中にX線を放出する。
ドウェルタイムは、十分な露出を有するためのX線放出時間を許容し、または時限シャッタ開放時間内または検出器の連続動作モード内である。 露光時間は、発生器スイッチによって制御されてもよい。 この取得プロセスにおける各構成要素の動作を計時し、同期させるためのマスタークロックがあってもよい。
2. 検出器は、発生器からの信号、外部同期して連続動作モードにされてもよい。または、X線放出位置用移動体は、同期して動作し、検出器が特定間隔でイメージを取得し続ける間、露出させるよう操作してもよい。例えば、各露光が100msである場合、発生器は、X線管が一定時間静止しているときに、例えば移動体と同期して正確にX線を生成してもよく、またはX線管は、各位置でドウェルタイム中にX線を放出する。
ドウェルタイムは、十分な露出を有するためのX線放出時間を許容し、または時限シャッタ開放時間内または検出器の連続動作モード内である。 露光時間は、発生器スイッチによって制御されてもよい。 この取得プロセスにおける各構成要素の動作を計時し、同期させるためのマスタークロックがあってもよい。
3. 外部同期による非連続動作モード:イメージ取得のタイミングを制御するため、マスタークロックを使用して、コントローラーのすべての部品または一部の部品を発生器のオン/オフ切り替えに同期させもよい。その結果、移動体の動き及び検出器のシャッターの開閉をトリガーする。
全てのモードにおいて、ユーザーはトリガー出力を有効/無効にすること、及び/又はトリガー出力の極性がローレベルかハイレベルかを選択することができる。トリガー出力アクティブタイムは読み出し時間とすることができる。
図31は、X線スペクトルイメージング及び又は断層撮影装置と統合されたフーリエ変換装置を示す。関心領域の2D投影測定は、1つ以上のX線源、及びX線検出器を用いて測定することができる。ビームスプリッタなどのX線オプティクスは、ビームを2つに分割し、一方は対象を照射し、他方はX線オプティクスへ進みX線ビームをX線検出器上で干渉パターンを形成し得る経路に反射させることができる。X線オプティクスは、ミラー、またはスペクトルグレーチングであってもよい。X線反射オプティクスを移動させ、時間領域の測定値を、例えばフーリエ変換によって空間領域に変換できるようにするための遅延線があってもよい。
分光学の課題の1つは、光源のスペクトル、すなわち異なる波長ごとにどれだけの光が放射されているかを特徴付けることである。スペクトルを測定する1つの方法は、光をモノクロメーターに通すことである。モノクロメーターは、ある波長の光を除くすべての光を遮断する装置である(遮断しない波長は、モノクロメーターのノブで設定される)。そして、この残った(単一波長の)光の強度を測定する。測定された強度は、その波長でどれだけの光が放出されているかを端的に表す。モノクロメーターの波長設定を変えることで、フルスペクトルを測定可能である。このスキームは、いくつかの分光計が単純化された方法でどのように機能するかを説明する。
フーリエ変換システムは、複数の異なる波長のX線ビームを一度に含むビームを入力として受け取り、全体のビーム強度を測定することができる。次に、ビームは異なる波長の組み合わせを含むように変更され、第2のデータポイントが与えられる。このプロセスは多数繰り返される。その後、コンピュータでこれらのデータを逆算し、各波長の光の量を推測する。
いくつかの場合において、X線源と検出器との間には、ある波長を通過させるが他の波長を遮断する(波の干渉による)X線ミラーの所定の構成が存在する。新しいデータポイントごとにミラーの1つを動かしてビームを修正し、通過できる波長セットを変更する。
生データ(各ミラー位置の光強度)を所望の結果(各波長の光強度)に変えるために、コンピュータ処理が必要な場合がある。フーリエ変換のようなアルゴリズムが使用される。生データは、「インターフェログラム」であってもよい。このようなインターフェログラムは、様々なX線放出位置で取得されてもよく、ROIの追加分析のために断層撮影インターフェログラムが形成されてもよい。低エネルギー測定では、インターフェログラムは利用できない情報を明らかにすることができる。1%以下のSPRまたは5%以下のSPRでは、このような測定は、これまで見えなかった軟組織に隠された特徴を詳細に示すかもしれない。スペクトルイメージングと組み合わせることで、さらに詳細な情報を明らかにすることができる。生データ」はフーリエ変換され、実際のスペクトルとなる。中央のピークは、ZPD位置(「ゼロ経路差」)である。ここでは、2本のアームの長さが等しいため、すべてのX線が干渉計を通過する。
フーリエ変換分光法の方法は、吸収分光法にも用いることができる。
例えば、X線吸収分光法では、サンプルが異なる波長の光をどの程度吸収または透過するかを測定することができる。吸収分光法と発光分光法は原理的には異なるが、実際には密接に関連しており、発光分光法の技術は吸収分光法にも用いることができる。まず、広帯域X線源の発光スペクトルを測定する(これを「バックグラウンドスペクトル」と呼ぶ)。次に、同じ線源を対象に当てたときの発光スペクトルを測定する(これを「試料スペクトル」と呼ぶ)。試料は光の一部を吸収するため、スペクトルは異なる。サンプルスペクトル」と「バックグラウンドスペクトル」の比は、サンプルの吸収スペクトルに直接関係する。
したがって、「フーリエ変換分光法」の技術は、発光スペクトル(例えば、対象の発光スペクトル)、および吸収スペクトル(例えば、対象の吸収スペクトル)の両方の測定に使用することができる。
フーリエ変換分光器は、連続波-マイケルソン干渉計などのマイケルソン干渉計の一例であるが、2枚の完全反射鏡のうち1枚が可動であり、ビームの一方に可変遅延(光の進行時間)を含ませることが可能である。
光源からのX線ビームは、ハーフシルバーミラーによって2つのビームに分割され、一方は固定ミラーで反射され、もう一方は可動ミラーで反射され、時間遅延が導入される。ビームは互いに干渉し、異なる時間遅延の設定ごとに光の時間的干渉を測定することができ、時間領域が効果的に空間座標に変換される。可動ミラーの多くの離散的な位置で信号を測定することにより、光の時間的干渉のフーリエ変換を使用してスペクトルを再構築することができる。
X線投影イメージは、最初に対象なしで、様々なX線放出位置又はX線源位置で行われてもよく、ここで、位置又はX線放出位置の同じセットが、対象が照射経路に置かれたときに関心領域を照射するために使用されることになる。
X線源又は線源上の放出位置が少なくとも2次元平面内で移動すると、測定値に基づいて多次元イメージが再構成されることができる。X線源又は放出位置の移動は、本明細書に記載されるように行うことができる。
例えば、調整可能な磁力を発生させる電流コイルのような電磁機構は、電子ビームが陽極ターゲットに当たるときに電子ビームを操向するために使用され得る。あるいは、X線放出位置が少なくとも2D平面又はより多くの次元で変化し得るように、モータ駆動移動体などの機械的機構が、X線源又は陽極ターゲットを移動させてもよい。
移動の各ステップは、第3軸で達成されることが望まれる分解能をほぼ満たすことができる。いくつかの場合において、測定は、より高い又はより小さいステップサイズで行われることができる。
各ボクセルについて、フーリエ変換測定は、本明細書に記載のスペクトル多次元測定を使用して解決されてもよい。
3D又は多次元イメージングは、選択された波長で2D又は1D又は点のX線測定を行うことによって再構築される。関心領域、又はターゲット又は成分における各ボクセルは、各波長において既知の値を有するように分解され得る。各ボクセルの各波長における値のフーリエ変換は、コンポーネントの材料および物質、ならびにコンポーネント、ターゲットまたは関心領域の構造または微細構造をさらに特徴付けるために得られることができる。
次に、イメージングまたは特性測定以外のデータセットの組合せについて説明する。
目下の対象に関連する分子測定、又は特性測定及びマクロ環境評価は、ユーザーが結論を導き出す、事実を導き出す、又は確率に基づく決定論的決定又は結論を下すために、又は分析又は推測又は理論形成又はデータ提示のためにデータモデルを形成し、特定のデータセット、非構造化及び/又は構造及び提示と合意のための基準、又は診断と事前計画のために選択できるよう事実を提示する際に使用されてもよい。
例えば、病気の診断や薬物標的の選択、あるいは統計解析やモデリングにおいて、対象の評価や監視、評価、疾病監視、治療後監視のために、抗体レベルの監視や時間的監視、特定又は非特定免疫反応のプロファイルなどの免疫プロファイルに関するデータを含めることが可能である。さらに、バイオマーカーやイメージマーカー、細胞シグナルや分子経路の変化、特定の分子の濃度や混合分子環境の特徴、生理状態、環境関連要素、対象の個人ゲノムや遺伝子データ、その親族の履歴データ、MRI、超音波、音響、弾性波、光学モダリティ、力学特性や動的特性、成分や混合物、組成物なども、データセットの一部として一緒に使用することができる。本明細書に開示されるX線イメージングは、1つ以上のタイプのデータの各々または組み合わせと共に使用されてもよい。そして、X線イメージングは、データセットの一部としてここに開示される1つ以上のタイプのデータを取得するために使用されてもよい。
コリメータに基づくビーム・フィルタリング技術は、例えば、分散した空間位置で対象の一次X線測定を行う際に散乱を除去し、選択された領域で低解像度の一次X線信号を生成するために使用することができる。
X線ビームを生成するための選択された領域を有するX線発生機構、例えば、電子ビームがターゲットと相互作用する際に表面に構成される陽極ターゲットは、選択された領域においてのみX線を発生させることができる。残りの領域は、電子ビームを吸収してX線ビームを発生させないか、空間領域で電子ビームまたはX線ビームを方向転換または誘導するか、時間領域で電子ビームまたはX線ビームを遅延させるか、あるいはその両方が可能である。
選択された波長及び/又はエネルギーレベル又は広帯域ビームに対する透過性領域と、選択されたX線ビームに対する不透過性領域とを有するビームセレクタ又はコリメータは、X線源と対象との間又は対象と検出器との間に配置され、そのような光線が透過する分散した空間位置を一次X線が通過するようにすることができる。
選択された領域における低解像度散乱信号を導出するために、例えばビームセレクタ又はコリメータを取り外すか、又は陽極ターゲット領域を変位させて修正又は変調することによって、一次X線又は一次プラス散乱信号の遮断なしに対象の第2のX線測定を行って得られた選択領域のX線測定から、選択領域における低解像度一次X線を差し引くことができる。
低解像度散乱信号は、検出器上のイメージング領域全体に補間され、高解像度散乱を導出することができる。
高解像度散乱は、第2のX線測定値から差し引かれて、高解像度1次イメージを生成することができる。
あるいは、対象と線源または対象と検出器の間にビーム粒子ストッパープレート100があってもよい。ビーム粒子ストッパープレートは、タングステン又は合金、又は鉛又は銅、又は亜鉛又は混合合金などの丸い形状のX線ビーム減衰材料を含んでもよい。このような材料は、大部分がX線透過性の領域を有するプレート上に、分布することができる。このような材料の位置によって、選択された位置で一次X線が遮断され、散乱信号のみが検出器に収集されるようにすることができる。このような散乱信号がイメージ全体で補間されると、高解像度の散乱信号を導き出すことができる。そして、測定値から高分解能の散乱イメージを差し引くことで、高分解能の一次X線を導き出すことができる。このようなシステムを図20に示す。
使用される検出器は、単一の検出器であってもよいし、積層型検出器であってもよく、積層型検出器の各々は、エネルギーまたはスペクトル感度または光子感度または速度において互いに同じであっても異なっていてもよいし、X線検出器または光学検出器であってもよい。
シンチレータは、上部の低エネルギー検出器と下部の高または中エネルギー検出器、各層検出器が1つまたは複数のエネルギーレベルまたはX線波長または光波長に対応する3層またはそれ以上の検出システム、を可能にする場合がある。
X線のエネルギーレベルや速度は、パルスごとに変化することがある。例えば、上部が20~70KeV、下部が70Kev~150Kevを検出できる場合、最初のパルスでは、30Kevと80Kevにパルスピークを持つX線パルスが発生することがある。積層型検出器は同時に検出することができる。散乱は、本明細書に記載の方法を用いて取り除かれ得る。そして、2回目のX線発生では、X線は50Kev及び/又は90Kevにエネルギーピークを含んでいてもよい。2つのエネルギーレベルの代わりに、4つのエネルギーレベルが測定される。あるいは、光子計数検出器が最上層または最下層に使用されてもよい。
あるいは、シンチレーション層の後に、透明な光学検出器を用いて、波長感度および速度の変化を第2の光学検出器で検出できるようにしてもよい。また、ビームセレクタを用いて、一次X線発生光のみを第2の検出器に通過させるようにしてもよい。光検出器を用いた散乱線除去も同様の方法で行うことができる。
広い視野が必要な場合、複数の検出器及び線源セットを使用することができ、あるいは対象の異なる領域をターゲットとするX線源を生成するビームスプリッタを備えた1つの線源を使用することができる。例えば、全身イメージングでは、1つ又は複数のX線源又は線源セットを、空間的に分散した位置又は同じ位置で使用することができる。X線領域または光学領域のいずれかの操向要素が使用されてもよい。他のX線オプティクス又は光学的オプティクス又はモジュールを使用して、電磁波を操作して、より大きな視野で対象の1つ又は複数のイメージを生成することができる。そのようなイメージは、小視野のイメージからつなぎ合わせた、1D、2D又は3Dの完全なイメージ又はセグメント化されたイメージであってもよい。このような取得イメージは、原画の1%以下または5%以下または10%以下に散乱除去されていてもよく、あるいは、散乱除去イメージと散乱除去イメージング処理なしのイメージとの組み合わせであってもよい。このような全身イメージング装置の一例を図37に示す。
散乱除去の一例を以下に示す。
散乱除去は、X線源からX線で対象を照射するステップと、後方検出器において低解像度の一次X線イメージを生成するステップと、前方検出器において低解像度の一次イメージを計算するステップと、前記前方検出器から高解像度イメージを読み取るステップと、前方高解像度イメージから前方検出器における低解像度イメージを生成するステップと、前方低解像度イメージから前方低解像度一次イメージを減算して前方低解像度散乱イメージを決定し、高空間周波数コンポーネントを除去することによって低解像度散乱イメージを平滑化するステップと、前記平滑化された低解像度散乱イメージを補間することにより高解像度散乱イメージを算出するステップと、高解像度イメージから高解像度散乱イメージを減算して前方検出器における高解像度一次X線イメージを生成するステップと、を含むことができる。
標準的なイメージ処理手順を使用して、散乱イメージ中の高い空間周波数の揺らぎを除去することによって、低解像度の散乱イメージを滑らかにし、散乱の性質と一致する低い空間周波数の信号のみがイメージ中に存在し得るようにすることが可能である。コンプトン散乱理論や実験データによると、2次元X線検出器上の散乱によって生成されるイメージは非常に滑らか、あるいは比較的低い空間周波数のみを持っている。
シングルエネルギー法を用いると、前方検出器の一次像D.sub.fPl (x(i),y(j)) と後方検出器の一次イメージD.sub.rPl (i,j) の関係は近似的にしか確立することができない。算出された前方検出器の一次X線イメージと真の前方検出器の一次イメージとの間には、常に僅かなずれがある。真の一次X線像と計算された一次X線像との差は、散乱によるものよりもはるかに高い空間周波数を有する像である。このように、一次像の正確なずれが分からなくても、計算された散乱像から高周波成分を除去することで、近似の精度を大幅に向上させることができる。
次に、平滑化された低解像度散乱イメージは、選択された投影線上にないそれらの前方検出器セルについて補間され、高解像度散乱イメージを生成することができる。最後に、高解像度散乱イメージを合成前方検出器イメージから減算して、主に一次X線を含むイメージ(散乱X線が実質的に除去された後の前方検出器における対象の完全な二次元イメージである)を得ることができる。
複数の対象または1つの対象における複数の関心領域のX線イメージングのためのX線システムは、1つまたは複数のX線源、またはX線源モジュール、例えば図に示されるように、12-1または12-2、または12-3、または12-4、または12-5を含むことが可能である。14は、それぞれが、例えばピクセル化X線源、又は単一、デュアル、又はマルチフィラメントX線源、又は調整可能な焦点スポットサイズ又は1つ以上の焦点スポットサイズを有するX線源、又は線形加速器又はシンクロトロン源のX線源において、比較的固定位置を有する2以上のX線源又はX線放射デバイスを有する。X線源モジュールの各々は、例えば機械的又は電気的、電気機械的、磁気的又はエネルギーベースの移動機構によって、互いに対して、又は対象に対して相対的に移動させることができる。
X線システムの検出機構は、1つまたは複数の検出器、又は検出器アセンブリを含んでもよく、各検出器又は検出器セットは1つ以上の検出器を含み、その対応するX線源又は複数線源からX線を受け取る。場合によっては、様々な場所にある複数の線源が、対象又は関心領域を照らし、少なくとも1つの検出器に投影するX線を生成することがある。検出器には、1つまたは複数の領域が存在することができる。各領域は、1つまたは複数のX線源に対応することができる。このようなX線源と検出器セット又は検出器上の領域によって取得された測定値は、異なるX線源によって取得された測定値と同期していてもよいし、関心領域から得られた測定値に基づいて、非同期であってもよい。例えば、同じX線源と検出器のペアによる撮影の経路や撮影の処理、関心領域のどこを撮影するかは、様々なバージョンがあり、どの経路や処理をとるかは、先の測定値に基づいて決定されてもよい。
X線源モジュールは、超高速のX線源を含んでもよい。ns、ps、またはフェムト秒以上のパルス速度、およびhz、khz、mhz以上の周波数の超高速X線パルスである。このような超高速パルスは、光、LED光、レーザー光、光増倍管を通過し、電子を生成し、それによって超高速パルスレートでX線パルスを生成するか、粒子加速器線形加速器、超高速レーザーによって変調電子とそれによって超高速X線を生成したり、ナノワイヤまたはナノ材料を打つ、超高速レーザー、プラズモンレーザーを使用してX線を発生させることがある。超高速レーザーで変調された電子がターゲットと相互作用してX線を発生させるものを線源として用いてもよい。液体金属ベースのX線源を使用してもよい。
X線源は、例えば、広帯域源と、コード化された開口Kエッジフィルタであってもよい1つまたは複数のX線フィルタなどの1つまたは複数のモノクロメーターとを用いて、1つまたは複数の離散エネルギーレベルを発生させてもよい。X線源は、時間的に又は同時に分離されてもよい1つ又は複数のエネルギーピークを有する広帯域源であってもよい。
X線源は、超高速パルス及び/又は離散エネルギーレベル若しくはスペクトルX線レベルを生成してもよく、1つ以上のエネルギーピークを有し、これらは時間的に変化してもよいし、さらに変化してもよい。
X線源は、フィールドエミッタ又は冷陰極源、シンクロトロン又は線形加速器源、線形加速器ベースの源、従来のX線管源、インクジェットベースの源、及び/又は一つ又は複数の焦点位置を有するX線源(一部は焦点の直径が変化している)を含んでもよい。
本開示の1つの局面として、グレーチング、ビームスプリッタ、及びインターフェログラムに使用されるX線オプティクスを含むX線オプティクスを、または集束ビームまたはビームスプリッタ、Mems、X線光学系および検出器、およびX線顕微鏡システムのX線源を、アプリケーション要件に基づいて、それぞれの光源の照明経路に出し入れ移動させるモータ駆動及び手動機構を有する。移動は、x y z または回転であってもよい。
あるいは、同様の機構を用いて、サンプルを線源または検出器に対して相対的に移動させることもできる。
X線イメージの拡大、又はX線イメージの縮小、又はX線ビーム又は照明の操作、又はX線を生成するためのX線ビーム又は電子ビーム又はの操向に使用される、X線オプティクス構成及び/又は1つ以上のX線又は光学オプティクス要素は、断層撮影、3D、2D、1D、または点測定におけるアプリケーションの必要性に基づいて、X線源と検出器の間のビーム経路で使用することができる。
さらに、図1に示されるように、X線源と検出器の間の、ROI以外のビーム経路内の任意の要素、例えば、テーブルトップ400及びビーム粒子ストッパープレート100は、X線を減衰させ、X線ビームを摂動させる可能性がある。このような効果は、検出器からのX線測定値を、スペクトルイメージング、トラッキング、及び断層撮影などの定量分析に使用する場合に考慮する必要がある場合がある。この効果は、フィルタに類似していてもよく、診断、治療/治療処置及び介入処置並びに監視及び追跡に必要なシングルエネルギー、スペクトル測定、散乱除去及び/又は断層撮影又は多次元再構成及び分析及び/又はAI分析における定量分析に必要なデータ及び測定値の較正のために、ROIのそれぞれの定量測定及び分析とは異なる時間に測定及び特徴付けることが可能である。
カテーテルプローブや生検プローブ、レーザーや超音波や電気プローブなどのエネルギー変調用プローブなどの手術器具誘導や測定対象の外部物体は、対象の全てまたは領域で様々なX線減衰特性を持つものを使用・設計し、x、y、z、ピッチ、ヨーロールの空間的6次元に加えて時間である7番目の次元など7次元で個別にイメージ化して追跡してもよい。
プローブ、ロボット又はカテーテル、インプラント又は外科用プローブ又は手術ツール又は生検ツールは、その身体の異なる領域で1つ又は複数のエネルギーレベルのX線ビームを異なって減衰させることができる。
プローブ、ロボット又はカテーテル、インプラント又は外科用プローブ又は手術ツール又は生検ツールの1つ又は複数の部分は、X線ビームを減衰させてもよく、及び/又は異なるレベルの減衰を有するX線ビームを減衰させてもよく、及び/又は異なる波長のX線ビームを異なるレベルで減衰させることができる。
このような第1の放出位置からのX線は、X線ミラー、グレーチングまたはメム(mem)装置などのX線オプティクスによって第2検出器に操向されてもよい。
第2の線源より下流または移動したX線源より下流のコリメータは、省略可能である。
第1検出器は、VOIを照射し通過するX線を測定するための第1検出器と定義することができる。
最後のX線測定又は以前のX線測定の関心領域、又は関心体積、又はユーザーによって選択されたVOI内を、異なるX線源又は異なる検出器又は異なるX線源及び検出器のペアでイメージングするために、種々の特徴及び機能のX線検出器を、VOIを通るX線を収集するために第1検出器の位置に配置してもよく、第1の検出器の上流又は下流、第1の検出器22の後に配置して、第1の検出器22と平行にxy平面内で回転又は直線的に移動した検出器29としても良い。フレーム速度及びピクセルフォーマットが異なる2つ以上の検出器29は、第1の検出器の下流に、第1の線源からの投影視線に配置されてもよい。検出器29は、フラットパネル検出器、複数のピクセルエネルギー感応型検出器、または小面積検出器または点検出器、または1D検出器、またはフォトダイオード、または光電子増倍管または点検出システム、またはX線ビームが次に空間的に感応する検出器または検出器アレイによって順に収集されるべきエネルギー感受性グレーチング上に分散するためのグレーチングなどのX線オプティクスを含むスペクトロメータであってもよい。
検出器29は、第1検出器22の上流、及び/又はビーム粒子ストッパープレート100の上流に配置されてもよい。
患者と検出器アセンブリとの間に、検出器22及び/又は29及び/又はビーム粒子ストッパープレート100を含むオプションの患者テーブルトップ又はサンプルホルダが存在してもよい。
X線イメージの解像度は、測定を超えて拡張することができる。一つの方法は、スキャンプロトコルを使用して物理的なピクセルサイズを超える特徴のキャプチャを行うようにピクセルピッチを超えて解像度を増加させ、増加した有効解像度を生成し、画質を向上させることである。
空間的にも周波数的にも、より高い解像度を得ることができる。例えば、パッチベース超解像(PBSR)などの空間領域超解像は、イメージの冗長性を利用して第2のモダリティからの低解像度イメージの再構成を導くために、高解像度モダリティからの空間特徴を参考として使用する方法である。この方法では、イメージ内の類似パッチを見つけ、類似の隣接ピクセルからの情報を使用してピクセルの再構成を試みる。PBSRは、医療用画像診断の分野で応用され、高解像度の磁気共鳴画像を基準として、低解像度の磁気共鳴分光画像を空間領域で再構成することが可能である。
選択されたROIをさらに照会するため、又は介入処置を展開するために、エネルギーベースの介入及び光学分光法又は温度センサー測定などの測定ツールなどの他の測定モダリティ並びに治療及び診断処置が使用されてもよい。
様々な介入処置の設計は、原子z、減衰係数、厚さなどの差別化可能なX線測定特性を有することによって最適化されてもよく、又はX線誘導処置又は測定方法に対してより良く可視化され応答される。
エネルギー変調測定が追加されてもよい。例えば、せん断波発生器が特定の関心領域をイメージ化するために使用されてもよい。
マイクロマニピュレータ又は他の機械的ツール又はエネルギープローブは、対象のさらなる操作及びその後のイメージング及び測定に使用されてもよい。
X線イメージングの前、間又は後に、RF、放射線治療、電磁エネルギー、音又は化学的メカニズムなどのエネルギー機構によって対象が変更されることがある。
音響超音波トランスデューサ又は音響発生器、トランスデューサ又はサーモベース超音波トランスデューサなどのエネルギー刺激機構は、剛性、動的機械解析などの機械的特性の測定によって対象又は関心領域を特徴付けるために実施されてもよい。貯蔵弾性率(E')は、材料の弾性応答の尺度である。蓄積されたエネルギーを測定する。損失弾性率(E")は、材料の粘性応答の指標である。
MR測定に使用されるパッシブドライバまたは枕のようなパッシブドライブは、機械波を誘発したり、組織または対象物中を伝播するせん断波を発生させることができる。この刺激は2次元有限要素シミュレーションであり、X線を用いて対象物の力学的波動伝播パターンや変位パターンを評価することができる。この剛性マップはエラストグラムと呼ばれ、疾患と正常のように異なる状態にある対象や組織を区別したり、組織やコンポーネントや対象の生理的変化の段階や発達の進行を特徴付けるために使用することができる。
ソフト媒体イメージングなどの感度及び解像度を向上させるために、位相コントラストX線が実施されることがある。
場合によっては、このような方法は、エネルギー刺激システム及び/又は非回転3D断層撮影法又は散乱除去法と組み合わせて、速度を上げ、放射線を下げ、感度及び分解能を上げることによって先行技術のX線イメージングをさらに改善することができる。
時間的及び/又は空間的摂動又は整形を伴うエネルギー変調X線イメージングは、本明細書に開示されるX線装置及び方法によって実行可能である。CTのような従来のイメージングシステムは、柔らかい生物組織のような柔らかい材料の識別及び特徴付けにおいて、相対的に制限され得る。
脳のイメージングでは、血管、毛細血管、その他の組織、ニューロンや細胞マトリックスを含む脳内物質への脳外傷の影響を見るために、弾性測定は、生検、イメージングツール、手術、エネルギーベースの治療やドラッグデリバリーを含む治療メカニズムの特性評価、診断、モニタリング、および/またはガイダンスに有用であると考えられる。
腫瘍、嚢胞又は正常組織又はその周囲の微小環境及び血管系又は血管新生などの疾患組織は、感度を向上させるために記載されたようにエラストグラフィによって特徴付けられ識別されてもよい。
軟質媒体、又は軟質材料、例えば生体組織などの材料は、弾性などのその機械的特性によってさらに特徴づけされてもよい。
音響機構は、熱に基づくものであっても、磁気または光音響に基づくものであってもよい。振動子、静的圧縮機、エアパフ及び音響放射力などの変形源は、材料の変位を生じさせ、X線イメージングシステム及び/又は光学システム及び方法を含むハイブリッドモダリティは、これらの変位を追跡することができる。前述のような伝搬せん断波またはガイド波を追跡して、時には感度および空間分解能を高めて、対象の弾性をマップ化することができる。対象の変調のためのエネルギー装置及び方法、例えば、Hz、KHz又はMHz、又はGHzにおける1つ以上の周波数での成分、又は対象又は対象の音響又はせん断波の摂動、及び/又は時間、及び/又は空間における、動的エラストグラフィ又は機械的若しくは歪み特性の測定は、点、1D又は2D又は3D又はより多くの次元、及び/又は時間及び/又は周波数における寸法及び/又は空間におけるX線測定における、例えば変位又は対象成分若しくは対象物質の密度に係る1つの変動により、導き得ることができる。正確な空間的及び時間的整形を伴う軟質媒体の非接触エネルギー又は機械的刺激は、動的エラストグラフィを測定及び追跡するために使用することができる。このような刺激は、例えば、超音波を空気と結合させて集束させ、反射に基づく放射力を用いて軟質材料などの領域の機械的変位を誘発する音響機構とすることができる。刺激は、本明細書に記載されるように、高速、多次元X線測定、例えば、散乱除去法及び/又は多次元X線測定及び/又はスペクトルX線測定若しくはイメージング、並びに位相差X線イメージング及びフーリエ変換X線イメージング、又は超低放射線追跡と組み合わせることができる。
エラストグラフィのアプローチは、図16に示されるような機械的な波の励起および/または検出のために、対象の材料に直接接触して実施することも、非接触で実施することもできる。
空気/軟質媒体の界面から反射される、空気と結び付いたUS(超音波)ビームは、反射に基づく音響放射力(ARF)によりせん断変位を発生させることができる。ARF技術は、音響損失および散乱機構を使用して実施することができる。
非接触機械的加振は、空気-媒体界面に集束する超音波ビームを、空気を通して発射する圧電トランスデューサを用いて実施することができる。この界面でビームが反射すると、媒質に向かって大きなARFが発生し、表面でせん断を含む過渡的な変位が誘発され、表面法線に対して横方向に伝播する機械波が生成される。これはハンマーで木をたたいたり、スティックでドラム缶をたたくような動作で、対象物に局所的な過渡力がかかると、その力に対して直角方向に大きな変位が発生することに類似している。空気と組織などの柔らかい媒体の音響インピーダンスは大きく異なるため、音響エネルギー変換の効率は100%に近い。過渡的な変位は1桁のミクロン単位、音圧は数kPa程度で、組織に対する潜在的な損傷閾値をはるかに下回るレベルであり、非侵襲的と考えられている。
例えば、1MHzのUS(超音波)パルスを、空気を通して組織表面に送るには、空気と結合したピエゾ電気トランスデューサを使用することができる。これは、高フレームレートのX線イメージングシステムによって容易に捕捉されるum規模の変位を伴う数kHz帯域幅の機械波を発射するのに十分な音響エネルギーで空気を通して組織表面まで効率的に伝達することができる。
例えば、本明細書に記載のX線システムは、組織体積上の機械的波動伝播を数分の一秒で捕捉し、体積内の平面ごとの音響機構による単一のマイクロタップ励起から3D弾性マップを再構成するために使用することができる。
1つ以上のX線細線ビームは、組織体積にわたる機械的波動伝播、又は1D、2D、又は3D測定を追跡し、捕捉することができる。このようなシステムは、本明細書に記載されるようなビームストッパー粒子プレート100を使用する散乱除去方法及び装置に基づいてもよい。
図18に示されるように、透過型グレーチング30などのグレーチングを含む位相コントラストX線イメージングシステムは、組織又は組織体積上の機械的波動伝播を追跡し捕捉するために使用されてもよい。このようなシステムは、使用される線源及び検出器に基づいて、ほぼリアルタイム又は超高速であってよく、散乱除去方法と組み合わせてもよい。
このエネルギー刺激に基づく弾性測定において、追跡された物質又は軟質物質を区別するために造影剤が使用される場合がある。場合によっては、造影剤が省略されることもある。
歪みエラストグラフィ、点せん断波エラストグラフィ、音響放射力インパルスの使用、及び2次元せん断波エラストグラフィ、例えば、UST1は、変位又はせん断パターンを生成し、本開示におけるX線イメージングシステム及び方法によって測定するために実施され得る。
伝搬型イメージング(PBI)は、位相コントラスト3Dイメージング法であり、物体内の屈折から生じる位相シフトが、物体-検出器間の伝搬を介して強度変動に変換され、経路上のオプティクスは不要である。波面が伝播する過程で、対照的な材料や厚みの変化によるわずかな位相差が蓄積され、検出器ではフレネルフリンジがはっきりと見えるようになる。PBIは、イメージ対象と検出器の距離において、および十分に高い空間的干渉を持つ線源が必要な点において、従来のX線吸収イメージングと異なる。従来のCT位相検索アルゴリズムとして一般的に知られているような1つ、2つ、またはそれ以上の材料位相検索アルゴリズムを、本明細書に記載された3D再構成方法および装置用に調整したものを使用することにより、ほぼリアルタイムまたは超高速測定および追跡が可能な完全な位相コントラスト多次元システムを実装することができる。
あるいは、グレーチング、ビームスプリッタ、場合によっては追加のグレーチング要素を用いて、図17に示されるような位相コントラストシステムを構築することも可能である。このようなシステムは、本明細書に記載されるような散乱体除去方法と組み合わせてもよい。
図17に示されるようなX線光学系に基づく位相コントラストシステムの例には、2つのタイプの干渉計が含まれる。タルボット型干渉計は、2つのグレーチング(G1およびG2)を使用し、タルボット-ラウ型干渉計は、追加のグレーチング(G0)を使用する。ビームスプリッターグレーチング(G1)は、距離d=dmで最大強度の振動を伴う周期p2の周期的な干渉パターンを発生するグレーチングである。η=1の場合。G1は周期的にπ/2と0だけ位相がずれるので、π/2シフトグレーチングと呼ばれる。η=2の場合、G1はπとゼロの周期的な位相シフトを導入している。
ビームの空間的干渉が小さすぎて干渉縞が形成されない場合は、線源グレーチング、またはG0、を使用することができる(タルボット―ラウ(Talbot-Lau)構成)。G2は、周期p2の周期的な吸収構造を持つアナライザーグレーチングで、干渉縞のわずかな変化を検出器での強度変化に変換する。G1とG2の間の幾何学的関係は、グレーチング干渉計を使用することによって与えられ、これらの信号の測定は、変位(屈折、位相シフト)または振幅減少(散乱)によって引き起こされるあらゆる変化について周期的干渉パターンを分析することによって達成することができる。
位相シフト相互作用は、ハードX線に対する吸収による相互作用よりも高い断面積を持つが、2つの物質のコントラスト対ノイズ比(CNR)の最終的な向上は、イメージング技術自体に強く依存する。グレーチング干渉計の場合、この利得は主にビームの干渉に依存するが、信号の空間サンプリング(例えば、ピクセルサイズ)にも依存する。
グレーチング干渉計による関心領域のポリクロマティック特性は、より高い帯域幅でのエネルギー依存およびエネルギー積分(ポリクロマティック)干渉縞の可視性を導き出すことによって測定可能である。一般に、広帯域のX線ビームにはπシフト位相グレーチングが有利であるが、最初の分数タルボット・オーダー(m=1)では、π/2シフトグレーチングがπシフトグレーチングをわずかに上回る。
グレーチング干渉計の位相ステップアプローチでは、グレーチングの1つをグレーチング周期にわたって横ビーム方向に移動させ、等距離の複数のステップでピクセル強度を記録することによって、位相ステップ曲線Ip(x)を取得する。投影される線源プロファイルS′(x)は、G0を持つX線管(タルボット型干渉計)の焦点スポットの形状、または線源グレーチング(タルボット-ラウ型干渉計のG0)によって生成される配列線源のいずれかとすることができる。
干渉縞の視認性と光子エネルギーの関係を解析的に導き、グレーチング干渉計のポリクロマティック性能を定量的に研究した。設計エネルギー付近の干渉縞視認性の2つのゼロクロス間のスペクトル幅であるスペクトルアクセプタンスは,多色性能の指標となるものである。しかし、フリンジ視認性のサイドローブは、スペクトルアクセプタンス外のエネルギーの光子も信号に寄与していることを示し、ポリクロマティックビームのために考慮されなければならない。π/2シフトグレーチングの場合、スペクトルアクセプタンス外の波長とm>1ではフリンジコントラストの反転が起こり、急激な減衰が発生する。
X線源における電子的位相ステッピングまたは電子ビーム操向は、図22に示され、これは、回折格子の機械的走査を排除し、なおかつ最大の空間分解能を保持する実施例を示す電子的位相ステッピングである。この例の電子位相ステッピングは、ソレノイドコイルを用いるなどして、X線管の線源スポットを電磁界で走査する。これにより、物体の投影が逆方向に移動し、また、投影とモアレ縞の間に相対的な移動が発生する。このとき、イメージをデジタル的にシフトして投影を再調整する。その結果、物体の投影は静止し、モアレ縞がその上を移動することになる。この技術は、位相ステッピング処理を効果的に合成する。
電子位相ステッピングは、例えば、図22に示されるように、電流発生ソレノイドコイルのような電子磁気操向器を使用して、電子ビーム、したがって、X線管内の陽極上の焦点スポットの位置を操向するものである。生成されるX線は、他の焦点位置から生成されるX線に対して異なる位相になる可能性がある。G1および/またはG2は、場合によっては省略されることがある。
本明細書に記載されるように、多次元及び3Dイメージング用の焦点スポットを操向するために、同じ装置及び方法が使用され得る。両方の機構及び実装は、1つ又は複数の電磁的操向装置を用いて、3D及び/又は位相コントラストイメージング及び/又は位相ステッピングの両方を達成するために組み合わされてもよい。
この装置及び方法は、特に検出器と平行な x y 方向の非常に小さな関心領域に対して細線X線ビームを生成するために使用されることもある。
スペクトルX線ビームが生成され、または逐次単色X線ビームが生成される箇所で、高解像度スペクトル測定または空間測定における高解像度、または速度における高解像度が達成される。これは最小のピクセルサイズを有する小型検出器または光子計数検出器またはPMTまたはフォトダイオードまたはシリコンシフト検出器、または点検出器、または線形検出器が使用されるためである。
スペクトルX線ビームが生成され、または逐次単色X線ビームが生成される箇所で、高解像度スペクトル測定または空間測定における高解像度、または速度における高解像度が達成される。これは最小のピクセルサイズを有する小型検出器または光子計数検出器またはPMTまたはフォトダイオードまたはシリコンシフト検出器、または点検出器、または線形検出器が使用されるためである。
電磁操向器を用いたX線測定は、せん断力発生装置、音響装置や超音波発生装置などの音と組み合わせて、サンプルの弾性を測定することができる。
ソレノイドコイルなどの電磁操向器を利用して、電子ビームやX線源の焦点位置を2次元または多次元に移動させ、関心領域を通過する可変照射路を生成する。検出器に垂直な軸に沿った未知のボクセルを解き、屈折率の実部および虚部の3次元分布を再構成する。暗視野信号の断層撮影再構成は、フェーズステッピング法、モアレパターン法のいずれにおいて実施可能である。
また、グレーチング干渉計を用いた暗視野イメージングにより、検出システムの空間分解能を超えたサブミクロン領域の構造詳細の方向情報を抽出できることが実証されている。グレーチングに垂直な方向のX線散乱は暗視野コントラストを提供するが、グレーチングに平行な方向の散乱はイメージにぼかしを生じさせ、検出器の低い分解能では見ることができない。このセットアップ固有の物理的特性を利用して、サンプルの局所散乱パワーの角度変化に関する方向情報を抽出するために、セットアップのオプティカル軸の周りでサンプルを回転させて、複数の暗視野イメージのセットを収集し、それぞれが特定の方向についてグレーチングラインに垂直な散乱成分を測定する。これは、骨の局所的な角度や配向の程度を決定するために使用でき、骨粗鬆症や変形性関節症などの骨疾患の研究や診断の向上に役立つ貴重な情報をもたらす可能性がある。
この構成では線源の空間的干渉が必要となるため、結果として高輝度シンクロトロン放射線源に限定される。この問題は、タルボット・ロー干渉計として知られる第3のグレーチングをX線源の近くに追加することで対処可能である。この線源グレーチングは、通常、透過スリットのある吸収型グレーチングで、「個々に干渉するが相互に干渉しない線源の配列」を作る。線源グレーチングは多数の個別開口を含み、それぞれが十分に干渉する仮想ライン線源を作ることができるため、線源サイズが数平方ミリメートルの標準的なX線発生装置を効率的に使用でき、視野を大幅に拡大することができる。
ビームスプリッタ・グレーチングの背後に形成される干渉縞の位置は、入射放射の広いエネルギー範囲にわたって波長に依存しないので、位相ステップ構成の干渉計は、多色放射でも効率的に使用可能である。モアレパターン構成では、単色放射の代わりに有限帯域のエネルギーを使用すると、モアレ縞の視認性が低下するため、放射エネルギーの制約はより厳しくなるが、ある程度の多色性は依然として許容される。多色放射の大きな利点は露光時間の短縮であり、これを利用して最近、白色放射を用いた初の動的(時間分解)位相コントラストトモグラフィを実現することができた。
位相グレーチングのみを用いたX線遠距離干渉計は、位相モアレ効果に基づくものである。中間グレーチングは、第1グレーチングのフーリエイメージを形成する。これらのイメージは第3回目のグレーチングと鼓動し、適切な距離で検出器上に広いモアレ縞を発生させる。物体による波面の位相のシフトと非干渉性により、縞が移動し、縞のコントラストが減衰する。
グレーチング製作の困難性は、位相モアレ効果の発見によって緩和され、多色遠距離干渉計(右図参照)と呼ばれる、小型線源で動作する全位相グレーチング干渉計が提供されるようになった。位相グレーチングは、位相シフトを起こすのに必要なグレーチングの深さが、X線を吸収するのに必要な深さよりはるかに小さいので、上記の線源や分析器グレーチングと比較すると、容易に作ることができる。200~400ナノメートル周期の位相グレーチングは、テーブルトップ型PFIイメージャの位相感度を向上させるために使用することができる。PFIでは、位相グレーチングを使用して、位相モアレ効果に基づき、微細な干渉縞を遠位面における広い強度パターンに変換している。高感度化だけでなく、線源の横方向の干渉が少なくとも1グレーチング周期以上必要であることも、グレーチング周期を小さくする動機の一つである。散乱が除去され、位相ステッピングと組み合わされた断層撮影イメージングが生成されると、以前は利用できなかったVOIに関する追加情報を明らかにすることができる。
<X線断層撮影装置の一例>
X線断層撮影システムまたはX線スペクトル撮影システムおよび/またはX線散乱移動システムは、1つのマイクロプロセッサを含むことができ、1または複数のコンピュータ表示システム、および異なる視点から1つまたは複数のマイクロプロセッサを伴ってもよいし、いなくてもよい。システムは、例えば、およそ全身撮影のような大きな視野を持つX線イメージングのための、及び/又は断層撮影支持構造、柱支持、検出器ガントリーアセンブリのための移動体を含むことができる。患者台は、検出器ガントリーの側部にフィットするようにローリングすることができる。あるいは患者が、患者を支持する表面を持つ検出器ガントリーアセンブリの上に直接横たわったり、座ったりすることができる。
X線断層撮影システムまたはX線スペクトル撮影システムおよび/またはX線散乱移動システムは、1つのマイクロプロセッサを含むことができ、1または複数のコンピュータ表示システム、および異なる視点から1つまたは複数のマイクロプロセッサを伴ってもよいし、いなくてもよい。システムは、例えば、およそ全身撮影のような大きな視野を持つX線イメージングのための、及び/又は断層撮影支持構造、柱支持、検出器ガントリーアセンブリのための移動体を含むことができる。患者台は、検出器ガントリーの側部にフィットするようにローリングすることができる。あるいは患者が、患者を支持する表面を持つ検出器ガントリーアセンブリの上に直接横たわったり、座ったりすることができる。
X線CTシステムまたはスペクトルイメージングシステムまたは散乱除去システム、は、以下を含むことができる。
X線源。
1つのX線放出位置、又はX線放出位置で線源を移動させるための移動機構。
任意で、ロータ。
任意で、コリメータ。
任意で、検出器を独立して移動させるための第2の移動機構。検出器とX線源の両方は、構造柱に取り付けられてもよいし、別々に設置されてもよい。例えば、線源は天井、または直立スタンドに取り付けることができ、検出器はこれに対応してテーブルなどの支持構造に配置されてもよく、または検出器およびモータは、直立スタンドに置かれたX線源のX線放出位置に面する、X線テーブル、手術台などの構造または支持装置、または単に車輪または直立スタンドによって支持されたガントリーなどの床へのアンカ機構に取り付けられてもよい。
任意で、ロータがボアの周りを回転することによって定義される中央イメージングボア。
任意で、ロータに取り付けられたX線源。
任意で、ロータに取り付けられた移動機構を有するX線源。
X線源。
1つのX線放出位置、又はX線放出位置で線源を移動させるための移動機構。
任意で、ロータ。
任意で、コリメータ。
任意で、検出器を独立して移動させるための第2の移動機構。検出器とX線源の両方は、構造柱に取り付けられてもよいし、別々に設置されてもよい。例えば、線源は天井、または直立スタンドに取り付けることができ、検出器はこれに対応してテーブルなどの支持構造に配置されてもよく、または検出器およびモータは、直立スタンドに置かれたX線源のX線放出位置に面する、X線テーブル、手術台などの構造または支持装置、または単に車輪または直立スタンドによって支持されたガントリーなどの床へのアンカ機構に取り付けられてもよい。
任意で、ロータがボアの周りを回転することによって定義される中央イメージングボア。
任意で、ロータに取り付けられたX線源。
任意で、ロータに取り付けられた移動機構を有するX線源。
ロータに取り付けられる検出器システムは、以下を含むことができる。
剛体フレームを含む検出器シャーシと、
検出器シャーシ内にあり、剛体フレーム上に配置された複数の検出器素子と、
検出器シャーシ上又は内部に配置され、複数の検出器要素から受信したイメージデータの並列処理を行い、散乱除去測定(一次比散乱が1%未満又は5%未満に除去された実質的に一次X線測定値)、及び/又は材料分解された測定値又はイメージ、及び/又はボア内あるいは線源と検出器の間あるいは線源と検出器の間のテーブル上またはホルダー上に位置する物体の3次元断層撮影再構成、を生成するための複数の処理コアを含む処理ユニット。
剛体フレームを含む検出器シャーシと、
検出器シャーシ内にあり、剛体フレーム上に配置された複数の検出器素子と、
検出器シャーシ上又は内部に配置され、複数の検出器要素から受信したイメージデータの並列処理を行い、散乱除去測定(一次比散乱が1%未満又は5%未満に除去された実質的に一次X線測定値)、及び/又は材料分解された測定値又はイメージ、及び/又はボア内あるいは線源と検出器の間あるいは線源と検出器の間のテーブル上またはホルダー上に位置する物体の3次元断層撮影再構成、を生成するための複数の処理コアを含む処理ユニット。
一次比散乱が1%未満又は5%未満であるX線CT又は散乱除去X線イメージングシステム、及び/又はスペクトルイメージングシステムにおいて、処理ユニットは、グラフィックス処理ユニット(GPU)を含むことができる。)GPUは、少なくとも2ギガバイトの内部メモリと、少なくとも2048個の処理コアとを含むことができる。
診断、追跡、治療前計画、モニタリング、調査及び、イメージガイダンスのために用いられる断層再構成及び/又は材料分解及び/又は散乱除去イメージング処理及び/又はデータ分析結果は、X線放出位置が対象物に対して相対的に移動するときに、少なくとも部分的に生成される。
X線イメージングシステムは、処理ユニットに結合された無線及び/又は有線の伝送器を更に含み、イメージ取得位置及び/又はロータから、離れた位置又は装置へ、断層撮影再構成を伝送することができる。
X線イメージングシステム、又はX線断層撮影システム、又はスペクトルX線システム、又は散乱除去X線システム、又は構造照明X線イメージングシステムは、X線管源から放射される放射線に対する視野FOVを調整するため、又は関心領域ROIを制限するため、又は選択したフィルタを線源の下流に設置するためのコリメータを更に含むことができる。
1又は複数の検出器モジュールは、剛性フレーム上に配置された複数の検出器モジュールを含むことができ、検出器のそれぞれを撮像経路の内外に移動させるモータを含み、各検出器モジュールは、複数の検出器要素の配列と、検出器要素の配列からイメージデータを読み出すように構成された関連電子部品と、を含むことができる。
上述したX線システムは、独立して移動可能又は積層可能な複数の検出器モジュールを含むことができ、及び/又は、積層された検出器モジュール間にビーム選択器又はビーム粒子ストッパープレート/配列をさらに含み、又は検出器モジュールの上流にビーム粒子ストッパープレートを有することができる。
各検出器モジュールは、線源及び/又は検出器が選択された位置にあることを示し、選択された視野FOV及び/又は関心領域ROIが選択されてイメージングに利用可能であることを示し、および/または選択されたフィルタまたはフィルタが所定の位置にあることを示し、および/またはジェネレータ同期信号又はトリガー信号、又は現在のイメージング取得ステップの前のイメージング取得ステップの後のプロセッサ命令に応答して、選択された視野FOVおよび/または関心領域ROIが選択され、イメージングに利用できることを示すマスタークロック又はモーションシステムからのクロック信号、及び/又はコリメータからのクロック信号の少なくとも1つを受信することに応答して、モジュール上の検出器要素の配列からイメージデータを読み出し、検出器モジュールからイメージデータを送信するプロセッサ実行可能命令を備えるように構成されるプロセッサを含むことができる。
各検出器モジュールのプロセッサは、検出器モジュールからの結合イメージデータを送信する前に、同じガントリーに配置された1つ以上の検出器モジュールから受信したイメージデータと結合するためのプロセッサ実行可能命令を含むよう構成可能である。上述したX線システムは、断層撮影再構成、及び/又はスペクトルイメージ、又は少なくとも1つの物質又はコンポーネントに分解された材料の測定、及び/又は本質的に一次X線の測定、及び/又は1%未満又は5%未満の一次比散乱を有するイメージ処理された測定、を生成するために全てのイメージング検出器モジュールからの結合イメージを検出器システムの処理ユニットに送信することができる。
上述したX線システムは、X線源によって放出された光子がイメージング経路内に位置する物体に衝突する前に光子の束を測定するように配置される検出器要素を含む参照検出器を更に含むことができる。参照検出器は、検出器システムの少なくとも部分的に外部に位置することができ、X線源によって放出された光子の束の測定値の電子的表現を生成する電子モジュールを含むことができ、光子の束の測定値の電子的表現は、断層撮影再構成の生成に用いるために検出器システム内の処理ユニットに送信される。
参照検出器は、X線源のX線ビーム出口ポートに近接して位置する検出器要素を含むハウジングと、検出器要素から電子モジュールに光信号を伝送するために検出器要素に結合された光ファイバーケーブルとを含むことができる。
任意で、検出器要素は、直接変換型X線検出器である。
任意で、電子モジュール及び/又は参照検出器は、コリメータ内又はコリメータのそばに配置される。
任意で、エネルギーフィルタは、1つまたは複数のエネルギーレベルの少なくとも1つのX線が参照検出器に到達することを可能にする通過を可能にする。
任意で、このエネルギーフィルタは、参照検出器に物理的に取り付けられてもよい。
電子機器モジュールは、検出器要素からのオプティカル信号を、検出器システム内の処理ユニットに伝送される電子信号に変換するフォトダイオードを含むことができる。
参照検出器は、X線源内の温度を示す電子信号を生成する温度センサーを含むことができ、X線源内の温度を示す電子信号は、断層撮影再構成の生成に用いるために、検出器システム内の処理ユニットに送信される。
本開示のX線イメージング、例えば、スペクトルX線イメージング、散乱除去X線イメージング、3D X線イメージングを使用して、関心領域の位置を特定し、内視鏡、生検針、治療プローブ、又は光イメージング焦点位置を、体内の腫瘍部位などの関心部位又は関心領域へ誘導することが可能である。X線イメージングは、内視鏡や光センサーの蛍光色素を活性化し、蛍光標識領域や蛍光イメージング支援処置、X線イメージングと光イメージングのデュアルモダリティイメージングのために、定量的測定と特異性をもって、外科的誘導、治療誘導、診断とモニタリングのいずれかを行うために使用することが可能である。
本明細書に記載される構造的照射は、選択された関心領域における造影剤のX線活性化に使用可能である。
フリーラジカル蛍光センサーは、X線活性化活動を監視し、腫瘍の定量化及び診断のような診断を可能にするために使用可能である。
あるいは、光学イメージング又は超音波又はMRIは、診断又は監視のためにX線イメージングを関心領域に向けるために、配置又は誘導又は情報を提供してもよい。
例えば、PET又はMRIは、診断段階において腫瘍の位置を特定し、スペクトル又は多次元イメージング、又は散乱除去方法及び装置による本開示のX線イメージングは、ターゲット特有の造影剤、又は造影剤を含まない腫瘍マーカーを用いて特異的に、リアルタイムで、又は時間経過とともに腫瘍サイズを追跡して位置特定及び監視することができる。
従来の方法では、1つのエネルギーで関心領域を選択し、そのROIをCTスキャンする。この方法の限界は、組織の重なりや散乱により、多くの細部を見逃し、その結果、関心領域の選択が最適化されないことである。スペクトルイメージングや低解像度3Dイメージング、散乱線を除去して材料分解したコントラストラベルX線イメージングなどを用いることで、関心領域を選択することができる。CTイメージングは、選択したROIに合わせて解析するにもかかわらず、ROIの周囲全体を撮影する必要があるため、高い放射線量と長い撮影時間が必要である。
本開示は、スペクトルイメージング、散乱除去イメージング及び3Dイメージング又はCTイメージングなどのROIを決定する方法を含み、複数のROI又はより小さなROIは、イメージング処理を通してリアルタイムで決定可能である。言い換えれば、ROIの決定は、撮影された各イメージ又は測定によって新しい情報が学習されるにつれて、反復又は繰り返され得る。
以下の開示は、カスタマイズされたイメージング及びスペクトル断層撮影のいくつかの例を示す。
図1~8に示されるように、様々なX線源は、VOIのイメージングのために検出器と整列したX線放出位置に出入りするように位置決めされる。或いは、各々が固定位置に留まるが、他とは離れて、例えば焦点スポット、視野FOV、パルス速度、エネルギーレベル、種々のパルス特性、変調特性などの種々の、異なるパラメータを用いて同じ対象又はVOI又はVOIの一部を照射するために、又はそれらは種々のオプティクス又はX線オプティクスの操作によって異なるように操作されてもよい。
図1に示されるように、ほぼ同じX線放出位置から同時に又は様々な時間枠でX線を放出するが、同じ又は変化した特性を有していてもよい2つ以上の線源がある。例えば、線源は、線源焦点サイズ、構造照明、視野FOV、フレームレート、又はエネルギーレベルなどのビーム空間及び時間特性、変化したパルス特性及び/又は位相及び振幅で変調されたパルス、干渉又は部分干渉性線源において変化してもよい。あるいは、そのような線源は、同じX線管に含まれてもよく、または各X線管は、機械装置またはロボット工学または運動システムによって分離または一緒に移動してもよく、または超音波、例えばX線真空管の周りのソレノイドコイルなどの電磁力または電気光学的な力またはMEMミラーなどの電子制御デバイスなどの変調エネルギー源および方法によって操向されてもよい。
線源の各々は、スペクトルイメージング及び/又は断層撮影、及び/又は完全な3Dトモシンセシス、又は多次元イメージングを可能にするための線源アセンブリに構成されてもよい。アセンブリは、空間及び時間におけるビームプロファイルの操作、電子及び/又はX線ビームの分割、変調される追加信号の生成、及び/又は電磁操向器や電気光学レンズなどのエネルギー機構によって移動又は操向されるための装置及び方法を含んでもよい。
再構成はまた、3次元での距離駆動投影及び逆投影を使用して達成可能である。
図35、37、48及び図52、54、55、28、30に例示される一次比散乱を1%未満、又は5%未満に減らすための散乱除去処理、スペクトル2D又は3Dイメージングシステム及び/又は断層撮影、又はスペクトル断層撮影で医療イメージングを行うモバイル及び/又は定常方法は、以下のものを含むことが可能である。
移動台の1つまたは複数の車輪に歯車連結されたモータを操作して、床を横切って移動台を推進することにより、移動台に取り付けられたイメージングシステムを運搬すること。
移動カート及び/又は可搬式患者支持体又は可搬式手術台を使用して、患者の関心領域がイメージング経路に位置するように、患者支持体をイメージングシステムに運搬すること。
イメージングシステム上のイメージング収集装置を用いて患者支持体上の患者のイメージデータを取得すること。
患者支持体をイメージングシステムから移動させること。及び
移動台車を用いて患者支持体をイメージングシステムから離れるように運搬すること。及び
患者支持体をイメージングシステムから移動させること。及び
移動台車を用いて患者支持体をイメージングシステムから離れるように運搬すること。及び
任意に、1つ又は複数の車輪を有する手術台をイメージングシステムから離れるように移動させること。
X線源と少なくとも1つの並進移動体に取り付けられた検出器システムを含むイメージングシステムでX線CT再構成を生成する方法は、Oリングシステムの再構成方法によって拡張可能である。以下は、n2マトリックス法のために最適化されたイメージング視点の角度から、複数の複雑な材料を有する領域にアクセスするための回転運動を含む。
ロータが回転している間に、検出器システムの複数の検出器要素で受信したイメージデータの電子表現を生成すること。
関心領域を決定する。
並進移動体は、VOIに対して、X線放出位置を少なくとも1つの直線軸で移動させることができる。ロータは、並進ステージまたはX線放出位置移動のための電磁操向装置だけでなく、パーソナライズド断層撮影法用のX線源も移動させる。
イメージが取得されている間に、イメージデータの電子表現を検出器シャーシ上又は内部に位置する処理ユニットに送信すること。
三次元断層撮影再構成を生成するために、処理ユニットの複数の処理コアを用いてイメージデータの並列処理を実行すること。および
三次元断層撮影再構成を生成するために、処理ユニットの複数の処理コアを用いてイメージデータの並列処理を実行すること。および
イメージング位置からロータ外の実体に断層撮影再構成を送信すること。
処理ユニットは、グラフィックス処理ユニット(GPU)を含むことができる、上述したX線システム。
GPUは、少なくとも2ギガバイトの内部メモリ及び少なくとも2048個の処理コアを含むことができる、上述したX線システム。
イメージが取得される間及び/又はX線放出位置が移動する間、断層撮影再構成を生成することを更に含む、上述したX線システム。
上述した再構成方法は、VOIの一連の又は一セットの投影測定を通じて物体内の関心領域内の未知のボクセルを解く、物体及び/又は検出器に対するX線源の異なる幾何学的位置における投影測定を相関させる幾何学的マトリックス結合アルゴリズムの計算を使用するなど、従来のCTシステムで使用されているアルゴリズムを含むことができる。第2の幾何学的マトリックスが作成され、又は新しい座標若しくは新しいベクトルが形成されて、両方の断層撮影方法が結合される場合がある。
アルゴリズムは、各ボクセルにおける、ROIの各層における、投影経路における、測定値からの減衰値の導出及び/又は光子束の計算と、検出器上の対応するピクセル又はピクセル領域の測定データと、に基づく再構成に使用され得る。反復アルゴリズム及び/又はモデルに基づく反復アルゴリズムは、VOIの一部として、ART又はモンテカルロなどの再構成モデル及び決定されるボクセルの投影経路におけるピクセル又はピクセル領域のために基づく既知の直接解から模擬測定データの収束を改善するために使用されてもよい。
上述したX線システムの再構成アルゴリズムは、例えば、xy平面上の、又はxyz体積内の、又は6D次元での小距離移動のステップ、及び場合によっては、いくつかのシステム構成における対応する検出器移動など、物体に対するX線放出位置の相対移動の記述に使用することができる、幾何学的マトリックス変換の記述を除いて、トモシンセシス及び/又はCT、又はスペクトルCTアルゴリズムの同一又は類似又は派生物でも良い。
実質的に存在しない及び/又は除去された散乱X線干渉、及び/又はデータセットの実質的な完全性及び/又はデュアル若しくはマルチエネルギー材料分解方法、いくつかの実施例におけるX線源放出位置の限られた動きの移動要件又は非移動性により、CT及びトモシンセシスアルゴリズムの同一又は類似又は誘導体を用いた再構成時間は時間的にずっと短くなり得る。
イメージ取得プロセスにおけるロボティクスの移動に起因する再構成におけるトモシンセシスおよびCTトモグラフィーのアルゴリズムの幾何誤差を修正する再構成アルゴリズムまたはステップ、および/または空間ジオメトリおよび移動構成の違いに起因するノイズまたはアーチファクトは使用されないことがある。反復回数は減らされるか、削除される。ピクセル単位での測定から導かれる事実および該測定に基づいて解析する場合、形状やマーカーを認識する方法、および/または再構成のための補間方法を使用しないことができる。
再構成アルゴリズムは、深層学習ベースの再構成の強みとして、データ駆動型の知識増強能力を強調することができる。
投影領域における欠落データから、2段階の深層学習アーキテクチャを実装することができる。第1ステップでは、投影領域の欠損データを考慮し、強度変化を補正する補正重みが学習され得る。第2ステップでは、変分ネットワークを用いてイメージ復元問題を定式化し、干渉性ストリーキングアーチファクトを除去することができる。
このような欠落データ補償方法は、以下の例で使用することができる。
低放射能が望まれる場合、例えば、検出器に垂直なZ軸の解像度が低くてもよい場合、このような欠落データ補償を用いることができる。
関心領域外の領域で新たに導入された未知領域について。例えば、多次元イメージ再構成のための投影測定中に、関心領域外の領域に新たに導入された行や列の未知ボクセルを回復するために、検出領域が幾何学的に制限される場合などである。
ビームストッパー粒子プレート/配列が使用される場合。デュアル又はマルチエネルギーレベルX線イメージングが実行される場合、ビームストッパー粒子プレート上のX線減衰領域は、各エネルギーについて対応するピクセル又はピクセル領域によって収集されるX線投射経路のそれぞれに対して固有の位置で移動されることがある。その相対的なピクセル又はピクセル領域に対する同じビームストッパー粒子プレートの位置について異なるエネルギーでの測定を繰り返すのではなく、X線減衰領域によって遮断された一次X線に起因して見逃されたイメージングデータは、ビームストッパー粒子が異なる位置にあるときに他のエネルギーレベル又は他のエネルギーレベルの測定で直接導出するか、VOIの同じ投影線に対する他のエネルギーレベル又は他のエネルギーレベルの測定から補償データを再構成する深層学習AIアルゴリズムによって補償され得るか又は導出することができる。
一例では、測定は、一次X線イメージングなどの断層撮影及び/又はスペクトルイメージング、及び/又はスペクトルCT、及び/又はトモシンセシス、又は散乱除去処理イメージ用のゲート付きX線イメージングシステム上である。このようなゲート付きシステムは、呼吸、又は運動、又は心臓運動周期ゲート付き撮像システム、及び/又はECG、又は信号処理ゲート付きイメージシステムに基づく他の測定又は介入処置、監視及び診断装置であってよい。
局所再構成アルゴリズムに基づく並列反復CT再構成は、ROIのサブ領域が同時に再構成される場合に使用可能である。
カスタマイズされた再構成は、関心領域が再構成されるとき、再構成プロセス内の任意の時間の間に、選択基準がユーザーによって入力されるか又は予め決定され、疾患領域及び/又は解剖学的マーカー又は基準に対する空間位置の認識など、デジタルプログラムによって制御されることを意味する。注目領域はさらに識別され選択されてもよく、再構成アルゴリズム及び反復アルゴリズム又は他のCT又はトモシンセシス関連アルゴリズムが再構成に使用されてもよく、それによって他の領域に対して優先権を有し、ひいては優先権を有する領域に対する再構成を高速化してもよく、又は再構成及びイメージ処理の観点から他の領域に対して優先権を有することができる。この処理により、最も重要な又は焦点を絞った又はカスタマイズされた及び/又はパーソナライズされたイメージング用のデータを取得するための再構成の速度が向上する可能性がある。イメージ再構成がイメージ取得と同時に行われる場合、焦点の領域の優先順位付け又はカスタマイズは、イメージ取得プロセス中に行われてもよい。
深層学習アルゴリズムは、1つ以上のマイクロプロセッサによるデータ、測定、イメージ取得性能を最適化し、アーチファクト、ノイズの低減、およびイメージ取得中および後の再構成処理と同様に領域を識別および選択することによる関連データの登録、収集および処理および/またはそのプロセスの反復のスピードアップに使用されてもよい。図11は、取得および/または構築の前、中、後のデータおよびイメージ処理の例を示す。
カスタマイズされた再構成は、2つのステップによって達成され得る。第1のステップでは、測定、イメージ取得が行われ、例えば、シングル、デュアル又はマルチエネルギーX線源の使用を制御すること、1つ又は複数のX線源及び/又はX線放出位置及び/又は検出器を物体及び/又は関心領域又は関心体積のイメージング経路に移動すること、コリメータを用いて視野及び/又は関心領域のために1つ又は複数の領域を選択すること、が行われる。エネルギーレベルをフィルタリングするためにモータ駆動フィルタを使用すること、関心領域を選択するためにビームチョッパーを使用すること、又はX線源を移動すること、及び/又は他のX線ビーム、電子ビーム及び/又は光ビームの拡大、集中、回折、屈折、分割及び平行化及び/又は操向及び/又は時間及び周波数及び空間領域におけるサイズ、量、次元、強度、位相を変調又は操作することである。第2のステップでは、再構成は、1つ又は複数のエネルギーレベルでの1つ又は複数のスペクトル断層撮影及びトモシンセシス及び/又は2Dイメージ、並びにデータセット再構成アルゴリズム又はプロセス又はステップを用いずに、しかしユーザー誘導最適化プロセスで実行される。カスタマイズされる対象のイメージ取得及び/又は再構成のための手順及びプロセス、並びに最適化されたプロセスに基づく最適化は、ユーザーの干渉を伴って又は伴わずに開発することができる。深層学習アルゴリズムは、処理されたイメージだけでなく、生のイメージに対する取得及び再構成のプロセスを訓練及び学習するために使用することができる。
深層学習アルゴリズムは、イメージ取得及び/又は再構成及び/又はデータ導出の期間に、ROIの選択領域の優先順位付けなど、再構成領域及び/又は測定値の解像度及び/又は測定値の疎性及び/又は測定値の圧縮構成及び再構成処理を最小化する要因を決定することによって、イメージ取得の制御に使用することができる。
マルチグリッド再構成は、本発明のX線システムの断層撮影再構成に使用することができる。
多数の投影イメージを取得することができるため、Zに沿った解像度を調整することができる。完全な3D再構成に必要なものよりも少ない場合、切断された欠落データがある場合、または取得されたデータが希薄すぎる場合、欠損データのギャップを埋めるために、CT断層撮影再構成における種々の方法または既知の方法が使用され得る。
イメージ再構成法には、直接法および/または変分法(正則化、反復法)のいずれかが使用される。直接法は連続領域で導かれ、適用が早く、測定回数が多い場合に良い結果を得ることができる。時間、空間、周波数領域での再構成が可能である。
変分法では、通常、データ項と1つまたは複数の正則項を含む目的関数を最小化することを含む。
本明細書に開示されるX線システムは、さらに、X線測定システムの改良または交換またはアドオンまたはキットまたは1つまたは複数の要素のセットによって変更することができる。
本明細書に記載されたイメージ処理又は制御又は統合のためのハードウェアピース又はモジュール又は関連するソフトウェアコンポーネント又はアルゴリズムの各々は、改修アイテム又は交換アイテム又はモジュールアイテムとして上に追加されてもよい。
このようなイメージングまたはそれ以上の少なくとも1つの要素は、イメージング用の完全なシステムを提供するためにシステムの他の部分を補完するためのキットとして使用されてもよい。
<支払方法>
X線イメージング記録保持および支払処理装置および方法について説明する。
X線イメージング記録保持および支払処理装置および方法について説明する。
以下の方法及び装置を含むイメージ撮影装置は、1つ又は複数のマイクロプロセッサ、有線又は無線通信装置及びプロトコル及びソフトウェアプロセス、並びに、ローカル又はリモートのクラウド、サーバ又はハードウェアストレージを含むことができる。
マイクロプロセッサは、取得され、処理され、処理されず、抽出され、選択され、及び/又は各々が存在した償還コードに追跡され得る、又は将来作成され得るイメージの数、又は処置の数を記録するためのメソッドを含むことができる。
マイクロプロセッサは、研究、又は研究のタイプ、又はイメージ、イメージのタイプ、イメージ利用手順、又は手順に関連する測定、又は測定及び再構成イメージからの抽出イメージ、測定及び再構成イメージからの抽出データなどの、1または複数の基準に基づいて各イメージを格納及び分類する1または複数のデータベース、又はデータベース構成を含むことができる。
マイクロプロセッサは、イメージにラベル付け又はタイムスタンプを付けるために使用するソフトウェア、又はアルゴリズムと関連付けられてもよい。
マイクロプロセッサは、DICOMラベルを添付するか、時間ラベルを追加するなど、2Dまたは3D、またはより多次元の、撮影された各イメージのタイムスタンプを作成し、マイクロプロセッサに格納されるデータベースに格納することが可能である。
マイクロプロセッサは、イメージ又はイメージセットを識別することができる。例えば、各イメージは、少なくとも対象又は関心領域の名前及び/又は説明、又は少なくとも固有の識別番号又は二値識別番号、又は前述のID情報の全てによってラベル付け可能である。
マイクロプロセッサは、各イメージング処理又は各イメージングセッション又は各研究又は治療又は診断又はモニタリング又は治療計画又は研究プロジェクト又は追跡期間についてのDICOMラベル又は一意の識別子に基づいて、対象ごとに撮影したイメージの数を記録できる。
マイクロプロセッサは、コンピュータ、X線ハードウェア及びソフトウェアを含む各X線システムについて撮影及び/又は処理されたイメージの数を記録し集計し、メモリ保存ユニットは、1つ又は複数の文書を電子的に格納することが可能である。各メモリ保存ユニットは、1日、1ヶ月、1年などの時間枠の間、又はシステムが使用されて以来撮影されたイメージの数のレポート又は最新の記録を有することができ、レポート又は文書は、コンピュータ及びその関連X線イメージングシステム又は電子メモリ保存ユニットにインターネット又はイントラネットを介して遠隔で物理的にアクセスする、又は例えばデジタル情報を保存及び処理できるメモリスティック又はセキュリティキーなどの直接物理的アクセスのいずれかによってアクセスされることが可能である。X線システムは、文書に基づいてレポートを生成するようにプログラムされ、レポートを電子的に保存し、レポートを電子メール又はハードコピー又は例えば他の電子機構を介して所定の受信者に定期的に自動的に送信し、サーバに保存され、パスワード保護され、X線システムの場所、及び/又は遠隔地のいずれかでパスワードを使用して記録にアクセスするためにログインによってアクセスできる所定の受信者のためにアクセスできるコンピュータを含むことが可能である。
本明細書に開示される装置は、本明細書に開示される装置によって、及び/又は本明細書に開示されるイメージング方法を使用して生成されたイメージを保存する、図8に例示されるようなストレージ及び/又はデータベースを含むことが可能である。各イメージ、又はイメージ及び/又はデータを含むデータセットは、時間t=tO、tl、t2における時間ラベルと関連付けることができ、時間の単位は、秒、又は分、又は時間、月、若しくは年、又はサブ秒から年までの任意の範囲であってもよい。そのような時間ラベルは、イメージ又はデータが取得される時間に関連付けることができる。各イメージ又はデータセットは、同じ設備で取得されてもよいし、取得されなくてもよい。時間感受性データベースは、図8の位置1又は2又は3のような1つ以上の位置又は設備又は異なるイメージング場所から対象のイメージを保存してもよく、これらは、同じ識別子又は関連する識別子を有する対象に関連する又は対象のX線イメージ以外の非構造化データ及び構造化データとリンクされてもよい。そのようなデータは、時間t=tO、tl、t2...における時間ラベルでラベル付けされてもよい。このようなデータベースは、データ及び/又はイメージから抽出された事実に関連する非構造化データ及び構造化データ、並びに/又は特定の時間に関連するデータを含んでもよい。このようなシステムにより、時間外における対象の同一関心領域のイメージの追跡と監視が可能となる。
本明細書に開示される装置は、例えば材料分解後に、時間的に敏感な散乱除去X線イメージとその後処理されたイメージを生成することができる。そのようなイメージは、時間指定子、一般にイメージが撮影された時間、でラベル付けされることができる。このようなイメージ及び空間的及び/又は時間的に対象を撮影した関連イメージセットには、各イメージ又はイメージセットの特定の時間と、対象に関連する識別子とを関連付けるために、タイムスタンプ及び/又は一意の識別子を付けてラベル付けすることができる。このようなデータベースから、時間に敏感なデータを含む1つ又は複数の事実が抽出されてもよい。
上述したラベル及びデータベースシステムは、カスタムDICOM(DigitalImagingand Communications in Medicine)ラベルを含むがこれに限定されないDICOMラベルの任意の機能を組み込んでもよい。ある実施態様では、特定の時間及び固有の識別子を有するこのようなラベルは、第2のID、例えば、比較的永続的である対象(すなわち、人間の患者)の社会保障番号、又は対象によって選択される識別子で作られてもよい。このような識別子は、乱数と統合して暗号を生成することができる。識別子は、対象者に関する1つの事実であってもよいし、対象者に関する2つ以上の事実の1セットであってもよい。識別子は、第1の識別子又は第1のセットの識別子が公開されないように、又は対象者のイメージ又はイメージセットにアクセスする際に隠されるように、対象者に関する第2の事実又は第2の鍵、又は対象者が割り当てた又は選択した2以上の事実若しくは番号のセットであってもよい。第2のキー又は第2の識別子は、第2の識別子を使用する追加のセキュリティ対策を含むことができ、これにより、個人情報にアクセスすることなく、特定の対象のイメージの検索及び/又はリンクの連続性を可能にすることができる。第2の識別子は、物理的な鍵や携帯電話などの装置のような番号またはアクセス方法であってもよい。
データベースは、対象者の個人情報を含まず、対象者に割り当てられた、または対象者によって選択された、または対象者に関連付けられた鍵、例えば、米国では社会保障番号であるかもしれない対象者の固有識別子を含んでよい。対象者及び/又は指定された実体物は、アクセス許可を確認又はさらに検証するためにアクセスすることができる。アクセスの安全性を高めるために、第2の識別子の異なる組合せを一緒に使用してもよい。データベースは、対象に関連する個人情報の一部または全部を含むことができる。個人情報がない場合又は個人情報の一部がある場合には、暗号化又はアクセス若しくは追跡方法を用いて、対象に関連するイメージデータ及び他のデータの時間的な連続性を確保することができる。二次鍵による乱数混合、遠隔および/または現場での第二アクセス装置、および/または同一装置からの第二アクセスコンポーネントなど、一つまたは複数の方法を使用することができる。第二の鍵は、社会保障番号のような長期的かつ非変化的な性質のものであってもよい。第二のアクセス装置は、物理的な鍵であってもよいし、無線または有線の装置が現場で使用されてもよい。代替的または追加的に、データベースへのインターネットまたはイントラネット通信がある場合、装置をリモートで使用することができる。
したがって、データベースシステムは、対象について、時間をかけて連続的及び/又は断続的にイメージデータをリンクし、検索し、及び/又は保存することが可能である。例えば、患者の疾患又は健康状態を診断、治療、及び/又は治療後に監視するために、このようなシステムは、患者のイメージに経時的にアクセスし評価することが可能となる。
データベースは、特定の時間枠の間に1つ又は複数の位置から撮影されたイメージの数の記録を含んでもよい。新しい測定値又はイメージが1度に又は経時的に取得されるとき、イメージ、又は測定値、又は測定値又はイメージから得られる事実が、一度に又は経時的にどれだけの数を得られるかの計算は、集計または記録または実際のデータを含むデータベース(事実およびデータを保存するデータベース)から、リアルタイムで行われてもよい。計算された集計またはデータは、X線イメージ取得システムの一部またはグラフィックカードおよびディスプレイを備えたイメージ表示システムの一部または患者の電子記録、履歴、診断および個人情報を含む他のタイプの記録を含む中央データベース内のローカルマイクロプロセッサに保存されてもよく、またはデータベースは、分類イメージまたは測定または測定から導出され事実の数の集計に使用されてもよい。
例えば、データベースは、少なくとも1つのマイクロプロセッサを有する1つ以上の、又は複数のイメージ取得システムからデジタル的に収集するように構築されてもよい。データベースは、イメージ取得システムにローカルに保存されてもよく、データベースは、別の場所にあるマイクロプロセッサ、又はサーバ、又はクラウド保存デバイスに保存されてもよい。1つの特定のイメージング取得システムごとに、又は1つの施設からの少なくとも1つのイメージング取得システム用に撮影されたイメージの数は、リアルタイムで、又は一定期間にわたって記録されてもよい。
撮影されたイメージ、又は撮影されたイメージを含む患者および研究、又は撮影されたイメージ数に関連する支払い装置及び方法は、少ない金額でイメージごとに支払うことに加えて、撮影されたイメージごとに基づき、購読に基づき、又は実行済み前払いに基づき、存在することができる。
一般に、CTシステムや一般的なX線システム、あるいはスペクトルイメージングシステムは、資本設備として販売される。ここに記載された装置及び方法の良好な販売コストは、より少ない複雑さとより少ないロボット工学の必要性により、一般的な放射線学レベルである可能性があることを考えると、これまでCTシステムを購入できなかった病院又はクリニックが、ユニットを購入する余裕ができるようになった。また、患者や医師がより利用しやすくするために、新たな支払い方法を採用することも可能である。
X線イメージ、測定又は分析のために記載された装置及び方法、ハードウェア及びソフトウェアの全体又は一部又はいくつかを使用するために、会員制料金、又は定期購入料金が課金される場合がある。
定期的な支払いには、当座預金口座やクレジットカード、銀行口座からの定期的な電信送金や直接預金を使用した自動支払いプロセスが行われる場合がある。
例えば、顧客は、X線イメージング及び測定を用いたイメージングガイダンスを含む多数のイメージ又は多数の処置に対して、年間又は月間の定額料金を支払うことができる。可能性の高い使用量又は使用システムに対応する様々な定期購入レベル及び支払レベルがある。システムが、使用量が予想されたものよりも多いと判断した場合、クリニックや緊急医療又は外科センターなどの顧客は、ソフトウェアを通じて電子メール又は電子メッセージで通知される場合がある。その後、購入者は、例えば、オンライン決済プロセスを使用して、当月の追加分を支払うか、定期購入レベルをより高いレベルにアップグレードするなど、選択した支払方法を使用することができる。ハードウェアとソフトウェアに関するサービスや無料のアップデートが、定期購入に含まれる場合もある。前払い金がない場合もあれば、最初に少額の定額料金を電子的または小切手によって支払う場合もある。電子的な支払いは、毎月、オンラインで電子的に、または小切手や電信送金、口座振替によって行われる。
データベース、又はイメージ若しくは測定値の計算された数、又は測定値から抽出された事実、及び/又はイメージ及び測定値に基づく(またはイメージ及び測定値から導かれた)分類データが、手順ごとの支払い方法又はイメージ若しくはイメージのセットごとの支払い又は分析若しくはイメージ処理サービスの購入に提供され得る。クリニックまたは病院は、装置の販売者またはイメージ処理サービスの販売者に、現金または現金相当の報酬を支払うか、または補償することができる。
サービスは、インターネットまたはウェブストア、またはモバイルアプリベースのストア、またはマーケットプレイスに掲載可能である。
以下では、イメージの取得、表示、及び測定の提示、並びに関連する又は派生するデータが、他の製品及びサービスと共に束ねられたサービスで提供される可能性がある例を示す。
ユーザーは、インターネット上で、あるいはインターネット上の1回または数回のクリックで、本を購入するのと同様に、イメージングまたは診断または分析サービスまたは製品を購入することができる。また、携帯電話や携帯電話アプリ、ウェブベースのアプリを使用して購入することもできる。購入の結果がトリガーとなり、ソフトウェアが販売者または販売者関連パートナーの倉庫、販売者及び/またはその関連パートナーの設置サービスプロバイダにメッセージを送信する。ソフトウェアによって生成された電子メッセージは、インターネットを介して送信可能であり、および/または、購入者に電話をかけて、販売の確認および/または設置の手配をすることができる。
1つ以上のイメージシステム及び/又は関連するビューアー、並びに保存及び通信ハードウェア及びソフトウェアは、好ましいサイト又は買い手指定サイトに設置されてもよい。そのようなシステムは、スタンドアローンであってもよいし、クラウド及びイントラネット又はローカルネットワークを介して接続されてもよい。
本発明の方法及び装置は、例えば、購入するために1回だけクリックする、又は購入するために2回以上クリックするなどのデジタル方式を用いて、インターネット上又はモバイルプラットフォームを介して購入及び販売されてもよい。購入方法は、通貨、またはブロックチェーンもしくは暗号通貨、またはクレジットカード、または銀行口座、または購入者と販売者の両方による他の許容可能な方法を使用することができる。
支払いは、暗号通貨および売り手と買い手が合意した通貨、または同等である商品とサービスの交換で、モバイルまたはインターネットまたは制御されたネットワーク機構を介してオンラインで行われることがある。
サービスのアップグレードまたは更新、あるいは新しいイメージと診断と手続きサービスの追加については、ユーザーは販売者のウェブサイトにログインして、支払いを行うことができる。または、そのような支払ポータルは、ユーザーの購買ネットワークと直接リンクされてもよい。異なるレベルのサービスがリストアップされ、ユーザーの利用履歴や好みに応じて最適化されたサービスモデルが提案される場合もある。
提案されたモデルは、オンラインまたはワークステーションアプリケーションを介して、ソフトウェアによって提供される質問票のリストに基づくことができる。ユーザーは、複数の選択肢の質問から選択するか、又は数字若しくは単語若しくはフレーズで回答を提供することができる。自動化されたソフトウェア、および/またはオンラインもしくは対面でのパートナーもしくは代理人からのアシストが、質問への回答を支援する場合がある。ユーザーまたは購入者は、ソフトウェアが提示する1つまたは複数の質問をスキップすることを選択することができる。
購入プロセスおよび/または取引の全体が暗号化されているか、セキュリティで保護されたポータルで実行される場合がある。
直接支払または資金移動が使用されるかもしれない。また、事前に資格のある買い手のために、販売者によって指定された期間、支払処理を遅らせることができ、このプロセスは、ソフトウェアによって管理されてもよい。
販売者は、イメージサービスを提供する製造者又は製造者の顧客若しくはパートナー又はその両方であってもよい。
販売者は、デジタルバンクおよび/またはデジタルウォレットサービスを介して、BtoBだけでなく、BtoCの製品およびサービスも提供することができる。
BtoBとは、Business to Businessを意味し、例えば、販売者から病院やクリニックなどへ。
BtoCは、Business to Consumerを意味し、例えば、イメージングサービスや診断サービスの提供者から患者や個人へ、及び/又は、機器の提供者から、クリニックや病院を経由して、例えば、クリニックや病院等といった顧客やパートナーの敷地内にイメージングユニットを設置し、及び/又は、クリニックや病院の患者でもある個人に対してイメージングサービスを直接提供するなど、イメージングサービス提供者を意味する。
一般的に、決済ハブは、決済取引を処理するために使用されてもよい。決済ハブは、加盟店銀行に追加で支払われる必要がある手数料の量に起因して、電子決済からインターチェンジ収益シェアを生成することができる。手数料及び関連料金は、通常、顧客である病院/クリニック/医療機関/イメージセンターから取引処理加盟店銀行に多額に支払われ、処理コスト、詐欺及び不良債権コスト、並びに支払承認に伴うリスクを賄うために使用される。また、金額が大きい取引の場合、手続きが煩雑になるため、各取引に要する時間が長くなる場合がある。
X線イメージング加入サービス、またはX線イメージングシステム、またはX線イメージングサービスを購入する際に必要なコストと時間を削減し、金融取引の効率を高めるために、X線イメージングシステムおよび/または関連製品およびサービスの販売者は、銀行またはデジタルウォレットサービスと提携してもよい。イメージングサービス又は機器の販売者は、デジタル銀行及び/又は電子財布若しくはデジタルウォレットソフトウェアプラットフォーム及び/又は関連する金融サービスを顧客に提供することによって、デジタル銀行となることができる。デジタルバンクの状態は、銀行ライセンス、電子マネーライセンス、またはサービスモデルとしてのライセンスである第三者のライセンスによって達成され得る。
デジタル銀行は、顧客が、ユーザー名とパスワード、及び/又は電話番号若しくは電子メール、及び/又は納税者番号、及び/又は社会保障番号、又は他の識別子情報を用いてサインアップし、銀行口座を持つことができるようにすることが可能である。
X線イメージング装置及び関連製品及びサービスの販売者は、顧客が電子機器に、又はサーバに遠隔でお金を保存し、携帯電話上のソフトウェア、モバイルウォレット又はデスクトップ、又は無線機器若しくはオンラインインタフェースを通じてデジタルウォレット、イーウォレット、又はデジタルアカウントを作成できるデジタルウォレット、又はイーウォレットを提供してもよい。デジタル銀行口座および/またはデジタルウォレットは、1つまたは複数の銀行口座やクレジットカードと接続することができ、銀行口座とクレジットカード間の切り替えなどの多くの機能をサポートし、および/または通貨の預金または保存、転送、支払い取引を可能にする。
デジタルバンクのためのソフトウェアプラットフォーム方法は、以下を含むことができる。
- 情報プレゼンテーションの薄い層を含むフロントエンド、例えば、モバイルアプリ、アプリまたはユーザー名とパスワードの入力とサインインと登録と関連情報を可能にするウェブ・ポータル、デベロッパーポータル。
- 製品層を含むバックエンド。これに、コアバンキングシステム、顧客データ、その他のバックオフィス関連プロセスが置かれる。
- フロントエンドとバックエンド、APIレイヤーの間で情報を調和させる中間層を含むミドルウェア。ミドルウェアには、APIレイヤーと呼ばれるサブ層が含まれ、外部/第三者アプリケーションへのすべての接続を可能にし、サービス提供、他の金融および製品サービスプロバイダ、または会計ソフトウェアを豊かにすることができる。ミドルウェアには、顧客口座、ローン、支払い、マーケットプレイス、デジタルオンボーディング、支払ネットワーク、カード、カード管理なども含まれる。
- 情報プレゼンテーションの薄い層を含むフロントエンド、例えば、モバイルアプリ、アプリまたはユーザー名とパスワードの入力とサインインと登録と関連情報を可能にするウェブ・ポータル、デベロッパーポータル。
- 製品層を含むバックエンド。これに、コアバンキングシステム、顧客データ、その他のバックオフィス関連プロセスが置かれる。
- フロントエンドとバックエンド、APIレイヤーの間で情報を調和させる中間層を含むミドルウェア。ミドルウェアには、APIレイヤーと呼ばれるサブ層が含まれ、外部/第三者アプリケーションへのすべての接続を可能にし、サービス提供、他の金融および製品サービスプロバイダ、または会計ソフトウェアを豊かにすることができる。ミドルウェアには、顧客口座、ローン、支払い、マーケットプレイス、デジタルオンボーディング、支払ネットワーク、カード、カード管理なども含まれる。
プラットフォームは、流通チャネル、製品、顧客/クライアントデータを切り離すことができ、すべてが将来の変化に対する弾力性を可能にするAPIで接続されるかもしれない。
コンプライアンスソフトウェアが、深刻な潜在的リスクを監視するために使用される場合がある。ERPやCRMソフトウェアのようなインテリジェントな顧客サポートツールは、例えば、電子メールキャンペーン、ビデオチャット、ソーシャルメディア機能を通じて、チャネル管理を最適化するために使用される場合がある。
デジタル銀行口座及び/又はデジタルウォレットは、ユーザーが以下の方法を用いて支払いを行うことを可能にする。
- NFC(near field communication)が搭載されている携帯電話では、指紋や虹彩、生体認証を使用することで、全体的な安全性を確保することができる。
-顧客のハードウェア機器、モバイル機器、販売者、販売店のパートナーによって生成された光学/QRコードなどのクラウドベースの技術を使用する。顧客のガジェットやハードウェアデバイスは、オンラインまたはオフラインで動作することができる。オフラインの例としては、バーコードリーダーやカードリーダーがあり、このようなガジェットを読み取って決済処理を行うことができる。
- デジタルオンライン配信技術は、インターネットを介して支払いが行われる暗号化されたソフトウェアアプリケーションである。
- SMSベースの決済では、SMSコマンド(支払い確認)を使ってアカウントが管理される。支払いはインターネットにアクセスできない場合でも可能で、顧客は販売者であるサービスプロバイダの代表者または販売者のパートナーに電話番号と支払い確認コードを通知することができる。
- NFC(near field communication)が搭載されている携帯電話では、指紋や虹彩、生体認証を使用することで、全体的な安全性を確保することができる。
-顧客のハードウェア機器、モバイル機器、販売者、販売店のパートナーによって生成された光学/QRコードなどのクラウドベースの技術を使用する。顧客のガジェットやハードウェアデバイスは、オンラインまたはオフラインで動作することができる。オフラインの例としては、バーコードリーダーやカードリーダーがあり、このようなガジェットを読み取って決済処理を行うことができる。
- デジタルオンライン配信技術は、インターネットを介して支払いが行われる暗号化されたソフトウェアアプリケーションである。
- SMSベースの決済では、SMSコマンド(支払い確認)を使ってアカウントが管理される。支払いはインターネットにアクセスできない場合でも可能で、顧客は販売者であるサービスプロバイダの代表者または販売者のパートナーに電話番号と支払い確認コードを通知することができる。
このような取引及び取引記録は、次のいずれかのタイプのネットワークで動作する配信技術で使用することができる。
- 販売者又は製造者のネットワーク、又は銀行取引及び支払取引における販売者のパートナーのネットワーク専用に設計され、X線イメージング装置、関連製品及びサービスの加入、イメージ処理、閲覧及び保存サービスのためのクラウドコンピューティングサービスの加入、PACサービス、医療記録保存サービス、診断サービス及び遠隔診断サービスなどの多数の製品又はサービスを提供し、市場を支援するこのようなネットワーク。あるいは、このようなネットワークは、イメージングサービス、又はスキャン毎若しくは処置毎の有料サービス、及び/又はイメージング装置の購読サービス、及び/又はイメージング装置の購入のために専用化されてもよい。
- ハーフクローズド型:病院・クリニック・イメージングセンターと、X線イメージングシステムおよび関連製品・サービスの販売者・製造者のパートナーであるデジタルバンキングまたはデジタルウォレットサービスプロバイダとの間で合意があれば、顧客が病院・クリニック・イメージングセンターを訪れる際にデジタルウォレットアプリを使用できる。
- 病院、クリニック、イメージングセンター、イメージングサービスプロバイダーの購買ネットワークやヘルスケアベンダーの支払いプログラムが、機器や関連製品サービスの販売元やメーカーのデジタルバンクネットワーク、サブスクリプションサービス、および/または手順ごとの支払いサービス、スキャンサービスと統合されたタイプ。ポータルは、顧客および/または販売者の既存の会計システムと接続し、サプライチェーンプロセスを調整し、支払いプロセスを自動化する。支払ハブは、サプライヤの支払タイプ(カード、ACH、小切手、特殊)の最適化による自動支払戦略の構築に使用され、同時に毎月の収益分配の機会を提供することができる。支払ハブは、単一の統合支払ファイルから始まり、電子メール送金を含む支払いと対応する詳細を容易にし、照合レポートを生成することができる。しかし、現在、イメージング製品の供給者又はイメージングサービスプロバイダーの販売者は、銀行であるか、又は支払取引及び関連する金融処理要求を処理する銀行の金融ネットワークと統合されている場合があるので、関与する支払取引コストは劇的に低減される場合がある。従って、取引及び支払処理手数料の額は、大幅に削減され得る。販売者は、購入者から、取引にかかる費用をほとんど請求しないか、ほぼゼロにすることができ、したがって、顧客側から商取引銀行の取引手数料の記録を保持する必要はない。
- 販売者又は製造者のネットワーク、又は銀行取引及び支払取引における販売者のパートナーのネットワーク専用に設計され、X線イメージング装置、関連製品及びサービスの加入、イメージ処理、閲覧及び保存サービスのためのクラウドコンピューティングサービスの加入、PACサービス、医療記録保存サービス、診断サービス及び遠隔診断サービスなどの多数の製品又はサービスを提供し、市場を支援するこのようなネットワーク。あるいは、このようなネットワークは、イメージングサービス、又はスキャン毎若しくは処置毎の有料サービス、及び/又はイメージング装置の購読サービス、及び/又はイメージング装置の購入のために専用化されてもよい。
- ハーフクローズド型:病院・クリニック・イメージングセンターと、X線イメージングシステムおよび関連製品・サービスの販売者・製造者のパートナーであるデジタルバンキングまたはデジタルウォレットサービスプロバイダとの間で合意があれば、顧客が病院・クリニック・イメージングセンターを訪れる際にデジタルウォレットアプリを使用できる。
- 病院、クリニック、イメージングセンター、イメージングサービスプロバイダーの購買ネットワークやヘルスケアベンダーの支払いプログラムが、機器や関連製品サービスの販売元やメーカーのデジタルバンクネットワーク、サブスクリプションサービス、および/または手順ごとの支払いサービス、スキャンサービスと統合されたタイプ。ポータルは、顧客および/または販売者の既存の会計システムと接続し、サプライチェーンプロセスを調整し、支払いプロセスを自動化する。支払ハブは、サプライヤの支払タイプ(カード、ACH、小切手、特殊)の最適化による自動支払戦略の構築に使用され、同時に毎月の収益分配の機会を提供することができる。支払ハブは、単一の統合支払ファイルから始まり、電子メール送金を含む支払いと対応する詳細を容易にし、照合レポートを生成することができる。しかし、現在、イメージング製品の供給者又はイメージングサービスプロバイダーの販売者は、銀行であるか、又は支払取引及び関連する金融処理要求を処理する銀行の金融ネットワークと統合されている場合があるので、関与する支払取引コストは劇的に低減される場合がある。従って、取引及び支払処理手数料の額は、大幅に削減され得る。販売者は、購入者から、取引にかかる費用をほとんど請求しないか、ほぼゼロにすることができ、したがって、顧客側から商取引銀行の取引手数料の記録を保持する必要はない。
本明細書で開示されるデジタルバンクは、顧客が支払いを受けるためにIBANを持つこと、または販売者またはデジタルバンク(銀行でもよい)に直接支払いを行うことを可能にするものである。
開示されるデジタルウォレットは、オンライン、またはモバイルデバイスおよび/またはキオスク上で実行される暗号化されたアプリであってもよい。デジタルウォレットは、顧客が米ドル、ユーロ、ビットコイン、イーサリアムなどの暗号通貨などの様々な通貨でプリペイド「現金」をデジタルウォレットに保存し預金することを可能にし、人は特定の場所でそれらで支払うことさえできる場合がある。
ビットコインはブロックチェーンネットワークに保存されている。デジタルウォレットには秘密鍵と公開鍵が含まれている場合があり、それらを使って作業することが可能になる。デジタルウォレットの例は、デスクトップウォレット、ハードウェアデータストレージデバイスを使用するハードウェアウォレット、オンラインデジタルウォレット、モバイルデジタルウォレットなどの暗号通貨ウォレットとして機能する。
デジタルウォレットまたはデジタル通貨またはデジタル銀行口座のユーザーは、2つ以上の以下のコンポーネントを有することができる。
- ソフトウェアコンポーネントは、セキュリティと強力なデータ暗号化を保証する。
- 情報コンポーネント、ビジネス顧客データ(名前、銀行口座の詳細、支払いオプション、住所)を含むデータベースを含む、情報コンポーネント。
- 連絡先、イメージング機器および/または装置のタイプ、製品およびサービスの購読サービスを含む顧客のプロフィールを含むデータベースを含む情報コンポーネント。
- 情報コンポーネントであって、個人データのユーザーデータ(名前、カードの詳細、支払いオプションなど)を含むデータベースを含むもの。
- 情報コンポーネントは、処方箋及び/又はイメージングサービス及び/又は医療記録に関する他の関連情報を含む患者のための医療記録データベースを含むネットワークに接続されてもよい。
- ソフトウェアコンポーネントは、セキュリティと強力なデータ暗号化を保証する。
- 情報コンポーネント、ビジネス顧客データ(名前、銀行口座の詳細、支払いオプション、住所)を含むデータベースを含む、情報コンポーネント。
- 連絡先、イメージング機器および/または装置のタイプ、製品およびサービスの購読サービスを含む顧客のプロフィールを含むデータベースを含む情報コンポーネント。
- 情報コンポーネントであって、個人データのユーザーデータ(名前、カードの詳細、支払いオプションなど)を含むデータベースを含むもの。
- 情報コンポーネントは、処方箋及び/又はイメージングサービス及び/又は医療記録に関する他の関連情報を含む患者のための医療記録データベースを含むネットワークに接続されてもよい。
様々なレベルのイメージ製品及び/又は関連する医療関連製品及びサービスは、デジタルウォレットから、又はデジタル銀行口座を通じて直接購入することが可能である。
顧客は、デスクトップやスマートフォン、オンラインキオスクのソフトウェアインターフェイスを介して、デジタル支払システムを選択することができる。デジタル支払システムは、将来のあらゆるオンライン取引のために通貨を保存するためのプリペイド及びパスワードで保護されたアカウントであってもよい。ユーザー又は顧客は、支払カードを顧客の口座に接続することができる。
販売者がデジタルバンクサービスを提供する利点の1つは、X線イメージング装置、関連イメージ及び/又はイメージングサービスの定期購入などの製品及びサービスを購入する顧客の取引コストを下げ、業務効率及び取引速度を向上させることである。
デジタル銀行及び/又はデジタルウォレットを介した取引処理による定期購入又は手続きに支払う方法と共に、患者に与えられるイメージング手続き前又はイメージング手続き後に、イメージ取得ソフトウェア又はイメージビューワのいずれかにおいて、患者が自分の医療データに対するアクセスルールを割り当てることができるオンライン質問表を含めることができる。例えば、オプトインは、それらのX線イメージデータ、又はイメージデータの一部を保存する。場合によっては医療記録または医療記録の一部が、サーバまたはブロックチェーンに保存され、管理及び/又は維持され、場合によってはイメージング定期購入サービス又は手続き毎若しくはイメージサービス毎の支払いのプロバイダによって所有される。ブロックチェーン技術および販売者やサービスプロバイダは、患者に自分の医療データに対してアクセスルールを割り当てることと同様、例えば、特定の研究者が一定期間それらのデータの一部にアクセスすることを許可することを可能にする。
場合によっては、医療データそのものではなく、タグ情報がデータブロックに保存されることがある。そして、X線測定値やイメージを含む実際の医療データは、病院または販売者のいずれかによって管理されるリレーショナルデータベース内のオフチェーンストレージに、患者によって設定されたアクセスルールに従って保存されるかもしれない。
オンチェーンデータは、このオフチェーンデータに関するメタデータを、実際のデータが存在する場所へのポインタ、およびオフチェーンデータの整合性を検証するために使用できるハッシュコードとともに保存することができる。またこの技術は、識別とアクセス制御、言い換えれば、オフチェーンに保存されたこのデータへのアクセス権を制御するメカニズムとして使用することができる。
AIは、顧客サービスに利用することができる。取引の詳細は、ブロックチェーン上にデジタル証拠として記録されることができる。
ビッグデータは、正確な引受を行うために使用され得る。
オープンバンキングは、デジタル銀行とデジタルウォレットの取引プロセスの特定の部分で使用することができる。
顧客は、デジタル・ウォレット・アプリケーションをダウンロードするか、オンライン・ウェブ・ポータルにアクセスし、金融ネットワークを通じてデジタル通貨を購入するか、金融ネットワークから転送し、ウォレットにデジタル通貨を保存し、スタンドアロン・アプリとして、またはウェブ・ポータルを通じて支払いを行い、他のデジタルウォレット機能金融取引を実行してもよい。
定期購入X線イメージサービス、X線イメージシステム、関連製品、およびサービスの支払いのための取引コストを削減し、取引速度を向上させる方法は、金融ネットワーク内で発生する支払いを含み、前記ネットワークは、時間間隔、例えば月の初日、所定期間に送信されるように自動化された金融処理要求に基づいて支払処理プロセスを含む。
支払処理ソフトウェアは、顧客情報を調べるために作成されたデータベースを調べ、顧客がサインアップした加入サービスのレベルを追跡し、定期的な支払いが行われる定期購入期間中のイメージ又は処置の総数を調べ、定期購入レベルを、顧客の1又は複数のイメージングサイトにインストールされた1又は複数のX線イメージングシステムによって撮影されたイメージ又はイメージング処置の総数と比較し、定期購入レベルと支払いレベルを一致させて、支払いを処理して支払いに関する電子メール報告書を送り、取られたイメージ又は処置の総数、償還コードに基づいてある場合は収益共有情報を生成する。定期購入レベル及び/又は支払レベルと、支払期間中に撮影された実際のイメージの総数との間に差異がある場合である。
撮影されたイメージの総数は、イメージ取得システムによって集計され、ローカルマイクロプロセッサ内のデータベースに保存され、自動電子メールを介してイメージング製品及びサービスプロバイダによって支払処理ソフトウェアにネットワークを介して送信され、又は管理者によって、又は定期的にX線技術者によって送信されてもよい。ローカルマイクロプロセッサは、X線検出器コントロールユニットの場所またはイメージ処理のためのワークステーションにある場合があり、これはまた、ディスプレイハードウェアおよび押しボタンを介してX線システムを制御するための膜コントローラーなどの他の制御ユニット、またはタッチスクリーン制御ディスプレイまたはデスクトップソフトウェアアプリを有するモニタ付きコンピュータに接続されている場合がある。
支払い処理アプリ機能及び関連ソフトウェアは、データベース内のイメージ又は処置の数、及び定期購入レベルの集計を比較し、比較結果及び支払金額を顧客に通知するための自動電子メール又は電話テキストメッセージを生成してもよい。ソフトウェアは、定期購入でカバーされない追加イメージのための追加料金の請求書を生成することができる。
顧客は、同じ支払ネットワークを介して差額の支払いを行うか、又はシステムにログインして、次の支払期間についてより高いレベルの定期購入サービスを選択することができる。
顧客がどちらも行わない場合、決済処理アプリは、定期購入にもかかわらず支払われなかった追加のイメージを、データベースの次の期間の集計に適用してもよい。同様の処理が、所定回数だけ行われる。
顧客サービス担当者は、そのようなプロセスが改善されずに続く場合、警告レポートを送信してもよい。顧客は、所定の方針及び手順に従って、前記警告に対する適切な対応を決定してもよい。
上記は、X線イメージング・マーケットプレースを安全でコンプライアンスに準拠したデジタル銀行方法及びシステムと統合することによって、X線イメージングシステム、X線イメージングサービスの加入、及び手続ごと及びイメージごとの支払いのための高速でコスト効率の良いデジタル支払い方法である。
<使用される用語>
ビーム粒子ストッパー「ビーム粒子ブロッカープレート」、「ビーム吸収プレート」、「ビーム粒子ストッパープレート」とは、例えばベリリウムやポリマーなどのX線透過性プレートの上に、例えば球体や他の形状を含む多数の分散したX線減衰ピースを配置したハードウェアピースを意味する。
ビーム粒子ストッパー「ビーム粒子ブロッカープレート」、「ビーム吸収プレート」、「ビーム粒子ストッパープレート」とは、例えばベリリウムやポリマーなどのX線透過性プレートの上に、例えば球体や他の形状を含む多数の分散したX線減衰ピースを配置したハードウェアピースを意味する。
コンポーネント
「コンポーネント」または「材料」または「物質」とは、X線によって測定され、背景と区別することができる要素をいう。例えば、流体導管、造影剤、金属、骨や組織、心臓の一部や血管など、介在物の構成要素である。
「コンポーネント」または「材料」または「物質」とは、X線によって測定され、背景と区別することができる要素をいう。例えば、流体導管、造影剤、金属、骨や組織、心臓の一部や血管など、介在物の構成要素である。
本開示は、特定の実施形態及び実施例の関係で説明されてきたが、本開示は、具体的に開示された実施形態を越えて、他の代替実施形態及び/又は使用並びにそれらの明白な修正及び等価物にまで及ぶことは、当業者には理解されよう。加えて、本開示の実施形態のいくつかの変形例を示し、詳細に説明したが、本開示の範囲内である他の修正は、当業者には容易に明らかであろう。また、実施形態の特定の特徴及び態様の様々な組み合わせ又は下位組み合わせがなされ、それでも本開示の範囲内に入ることが考えられる。例えば、ある実施形態に関連して上述した特徴は、本明細書に記載された異なる実施形態と共に使用することができ、その組み合わせは依然として本開示の範囲に入る。開示された実施形態の様々な特徴及び態様は、本開示の実施形態の様々な態様を形成するために、互いに組み合わせたり、置換したりすることができることを理解されたい。したがって、本明細書における開示の範囲は、上述した特定の実施形態によって限定されるべきではないことが意図される。したがって、特に明記しない限り、または明らかに相容れない場合を除き、本開示の各実施形態は、本明細書に記載されたその本質的な特徴に加えて、本明細書に開示された本開示の他の各実施形態から本明細書に記載された1つまたは複数の特徴を含み得る。
特定の態様、実施形態、または実施例と関連して説明された特徴、材料、特性、またはグループは、それと互換性がない限り、本章または本明細書の他の場所で説明された他の態様、実施形態、または実施例に適用可能であると理解されるものとする。本明細書(添付の請求項、要約書及び図面を含む)に開示された特徴の全て、及び/又はそのように開示された任意の方法又はプロセスのステップの全ては、かかる特徴及び/又はステップの少なくとも一部が相互に排他的である組み合わせを除いて、任意の組み合わせで組み合わせることが可能である。保護は、任意の前述の実施形態の詳細に限定されるものではない。保護は、本明細書(添付の請求項、要約および図面を含む)に開示された特徴の新規なもの、または新規な組み合わせ、あるいはそのように開示された任意の方法またはプロセスのステップの新規なもの、または新規な組み合わせに及ぶ。
さらに、別々の実施態様に係る文中説明で本開示に記載されているいくつかの特徴は、単一の実施態様において組み合わせて実施することも可能である。逆に、単一の実施態様に関して文中で説明される様々な特徴は、複数の実施態様において別々に又は任意の適切な下位組合せで実施可能である。さらに、特徴は、特定の組み合わせで作用するものとして上述されることがあるが、特許請求の範囲に記載された組み合わせからの1つ以上の特徴は、場合によっては、組み合わせから削除可能であり、組み合わせは、サブコンビネーションまたはサブコンビネーションのバリエーションとして特許請求の範囲に記載されることがある。
さらに、操作は特定の順序で図面に描かれたり、明細書に記載されたりすることがあるが、望ましい結果を達成するために、そのような操作は、示された特定の順序または連続した順序で実行される必要はないし、またはすべての操作が実行される必要はない。描かれていない又は説明されていない他の操作は、例示的な方法及びプロセスに組み込むことができる。例えば、1つ又は複数の追加の操作を、説明された操作のいずれかの前、後、同時、又は間に実行することができる。さらに、他の実施態様において、操作を並べ替えたり、順序を変えたりすることができる。当業者は、いくつかの実施形態において、図示及び/又は開示されたプロセスにおいて取られる実際のステップは、図に示されたものと異なる場合があることを理解するであろう。実施形態によっては、上述したステップのうちのあるものは削除されてもよく、他のものは追加されてもよい。さらに、上記に開示された特定の実施形態の特徴及び属性は、異なる方法で組み合わされて追加の実施形態を形成してもよく、これらは全て本開示の範囲内に含まれる。また、上述した実施態様における様々なシステム構成要素の分離は、全ての実施態様においてそのような分離を必要とすると理解されるべきではなく、説明した構成要素及びシステムは、一般に、単一の製品に一緒に統合することができ、又は複数の製品にパッケージングすることができると理解されるべきである。
本開示の目的のために、特定の局面、利点、及び新規な特徴を本明細書で説明される。必ずしも全てのそのような利点が、任意の特定の実施形態に従って達成され得るわけではない。したがって、例えば、当業者は、本明細書で教示又は示唆され得る他の利点を必ずしも達成することなく、本明細書で教示される1つの利点又は利点のグループを達成する方法で、本開示を具体化又は実施することができることを認識する。
本明細書で使用される条件付き言語、例えば、特に、「できる」、「できた」、「かもしれない」、「してもよい」、「例えば」などは、特に明記しない限り、または使用される文脈内で理解される限り、特定の実施形態が特定の特徴、要素および/またはステップを含み、他の実施形態が含まないことを伝えるように、一般的に意図されている。したがって、このような条件付き言語は、特徴、要素、及び/又はステップが1つ以上の実施形態に何らかの形で必要であること、又は1つ以上の実施形態が、他の入力又は催促の有無にかかわらず、これらの特徴、要素、及び/又はステップが任意の特定の実施形態に含まれるか又は実行されるべきかを決定する論理を必ず含むことを意味することは一般的に意図されていない。用語「からなる」、「含む」、「有する」などは同義であり、包括的に、オープンエンドに使用され、追加の要素、特徴、行為、操作などを除外するものではない。また、用語「または」は、その包括的な意味で使用され(排他的な意味ではない)、例えば、要素のリストを接続するために使用される場合、用語「または」は、リスト内の要素の1つ、いくつか、またはすべてを意味するようにする。
「X、Y、およびZのうちの少なくとも1つ」のような接続語は、特に断りのない限り、アイテム、用語などがX、Y、またはZのいずれかである可能性を伝えるために一般的に使用される、と文中で理解される。したがって、このような接続語は、特定の実施形態がX、Y、およびZのうちの少なくとも1つの存在を必要とすると暗示することを一般的に意図していない。
本明細書で使用される「約」、「およそ」、「一般的に」、及び「実質的に」といった程度の言葉は、所望の機能を依然として実行するか又は所望の結果を達成する、述べられた値、量、又は特性に近い値、量、又は特性を表している。例えば、用語「約」、「およそ」、「一般的に」、及び「実質的に」は、記載された量の10%未満、5%未満、1%未満、0.1%未満、及び0.01%未満である量を指す場合がある。別の例として、特定の実施形態において、用語「概ね平行」及び「実質的に平行」は、15度、10度、5度、3度、1度、0.1度、又はそれ未満だけ、正確な平行から外れる値、量、又は特性を指す。
本明細書に開示されたいかなる方法も、言及された順序で実行される必要はない。本明細書に開示された方法は、実務者が行う特定の動作を含むが、明示的又は暗示的に、それらの動作の任意の第三者による指示を含むことも可能である。例えば、「対象を照射する」といった動作は、「対象の照射を指示する」ことを含む。
本明細書に記載される方法及びタスクの全ては、コンピュータシステムによって実行され、完全に自動化されてもよい。コンピュータシステムは、場合によっては、記述された機能を実行するためにネットワークを介して通信し相互運用する複数の異なるコンピュータまたはコンピューティング装置(例えば、物理サーバ、ワークステーション、ストレージアレイ、クラウドコンピューティングリソースなど)を含んでもよい。各そのようなコンピューティング装置は、典型的には、メモリまたは他の非一過性のコンピュータ可読記憶媒体または装置(例えば、ソリッドステート記憶装置、ディスクドライブなど)に保存されたプログラム命令またはモジュールを実行するプロセッサ(または複数のプロセッサ)を含む。
本明細書に開示された様々な機能は、そのようなプログラム命令において具現化されてもよく、及び/又は、コンピュータシステムの特定用途向け回路(例えば、ASIC又はFPGA)において実施されてもよい。コンピュータシステムが複数のコンピューティング装置を含む場合、これらの装置は、同居していてもよいが、そうである必要はない。開示された方法及びタスクの結果は、固体メモリチップ及び/又は磁気ディスクなどの物理的な記憶装置を異なる状態に変換することによって永続的に保存され得る。いくつかの実施形態では、コンピュータシステムは、処理リソースが複数の異なる事業体または他のユーザーによって共有されるクラウドベースのコンピューティングシステムであってよい。
本開示の範囲は、本章または本明細書の他の場所における好ましい実施形態の特定の開示によって限定されることを意図しておらず、本章または本明細書の他の場所で提示される、または将来提示される請求項によって定義され得るものである。特許請求の範囲の文言は、特許請求の範囲に採用された文言に基づいて広く解釈され、本明細書に記載された実施例または出願の遂行中に限定されず、これらの実施例は、非排他的であると解釈される。
Claims (123)
- 改良されたコンピュータ断層撮影イメージングシステムであって
複数の発散ビームを生成するように構成された少なくとも1つのX線源と、
複数の放出位置から放出され、イメージ化される対象の少なくとも一部によって減衰されたX線ビームを受け取るように構成された複数の検出器であって、前記複数の放出位置は、前記対象における関心体積(「VOI」)に対する第1の位置を含み、前記第1の放出位置から放出されたビームは、6D空間又は任意の可能な投影ジオメトリの組み合わせの中の少なくとも1つのx-y平面2軸上に投影される、複数の検出器と、を備える、X線イメージングシステム。 - 前記複数の放出位置は、第2の位置を含み、前記第2の位置から放出されたビームは、少なくとも1つの平面又は別の2D又は3D次元に投影され、前記VOI内の少なくとも1つのボクセルは、前記第1の位置から放出された前記ビームが進む投影経路上にあり、前記第1及び前記第2の放出位置間の距離は、z軸に要求される分解能にほぼ等しい、請求項1に記載のシステム。
- 前記VOI内のほぼ全ての前記ボクセルが前記投影経路に位置する、請求項1または2に記載のシステム。
- 前記複数の放出位置は、第3の位置を含むことを特徴とする請求項1または2に記載のシステム。
- 前記第3の位置から放射されたビームは、断層撮影に必要な6D空間の外側の軌道をたどるように構成され、異なるVOIを選択できるように前記対象の視野のサイズrを増加させる、請求項4に記載のシステム。
- 前記第3の位置から放出されるビームは、完全なイメージを再構成するのに必要な6D空間の外側の軌道に従うように構成され、疎な投影状況において、又は少なくとも1つの異なるエネルギーレベルを有する前記X線源からの投影に対して異なる角度を提供し、及び/又は異なる焦点サイズ又は異なる視野、異なるフレームレート又はエネルギー手段若しくは電子手段若しくは光学手段によって異なる変調を受けるように構成される、請求項4に記載のシステム。
- 前記複数の放出位置のうちの1つ又は複数から放出されたビームが進む経路が、異なるX線源から放出されたビームによって進行し、前記異なるX線源が、複数の異なるエネルギーレベル及び焦点スポットサイズを有するか、又は複数の異なるフレームレートを有するか、又は異なるタイプの線源を構成する、請求項1~6のいずれかに記載のシステム。
- 前記複数の検出器からX線減衰データを取得するように構成された取得システムであって、前記複数の検出器からX線減衰データを取得する取得システムと、
前記X線減衰データから得られる第1のデータセットを受信し、第1の再構成イメージを再構成するアルゴリズムを実行するように構成されたイメージ再構成器と、を含むコントローラーをさらに備える、請求項1~7のいずれかに記載のシステム。 - 前記第1のデータセットは、一次に対する散乱が1%未満又は5%未満である一次X線データを含む、請求項8に記載のシステム。
- 前記第1のデータセットは、一次X線が時間領域で散乱から分離される飛行時間X線測定を含む散乱除去方法を用いて散乱除去されたデータから導出される一次X線データを含む、請求項8に記載のシステム。
- 前記第1のデータセットが、可動ビーム粒子ストッパー配列及び/又は調整可能な若しくは可動なビームセレクタを使用し、高解像度散乱イメージを生じさせるために低解像度散乱の補間を使用することから導出される1%未満又は5%未満のSPRを有する一次X線データを含む、請求項8に記載のシステム。
- 前記第1のデータセットは、前方検出器、ビーム粒子ストッパー配列、及び後方検出器から導出される1%未満又は5%未満のSPRの一次X線データを含み、低解像度散乱の補間を用いて前記前方検出器又は前記後方検出器における高解像度散乱イメージを生じさせる、請求項8に記載のシステム。
- 前記前方検出器は可動前方検出器である、請求項12に記載のシステム。
- 前記第1のデータセットは、前記複数の放出位置及びVOIに対応する前記複数の検出器による投影イメージングデータから得られるデータを含む、請求項8に記載のシステム。
- 前記第1のデータセットは、前記第1または第2の位置の一方または両方において選択された検出器領域によって測定された逆エネルギー関数システムルックアップから導出されたデュアルエネルギー物質分解物質データセットからの投影イメージングデータから導出されたデータを含む、請求項8に記載のシステム。
- 前記第1のデータセットは、前記複数の放出位置のうちの2つ以上において前記選択された検出器領域によって測定された逆エネルギー関数系ルックアップから得られるデュアルエネルギー材料分解物質データセットから導出されたハウスファイド値(Housefied value)を含む、請求項8に記載のシステム。
- 前記コントローラーは、少なくとも1つの物質に対する注意喚起データを提供するために材料分解を実行するようにさらに構成されている、請求項8~16のいずれかに記載のシステム。
- 前記コントローラーは、前記第1又は第2の放出位置の一方又は両方において放出されたX線からの前記VOIの2Dデュアルエネルギー又はマルチエネルギー測定に基づいて、材料分解を生成するようにさらに構成される、請求項8~16のいずれかに記載のシステム。
- 前記材料分解方法は、VOIの厚さの測定のために飛行時間センサーまたはカメラまたは以前のX線被曝からの測定値を使用することを含む、請求項18に記載のシステム。
- 前記飛行時間センサー及び又はコントローラーは、前記第1のセットデータ及び/又は第2のデータセットの少なくとも一部を生成するX線測定の露出レベルを決定するように構成されている、請求項19に記載のシステム。
- 前記再構成器は、CT、又はトモシンセシス、又はMRI、又は電子断層撮影、又は光断層撮影、又はサーモイメージング、PET、又はSPECTのための断層像再構成のためのアルゴリズム、又はその派生物を含む、請求項8~20のいずれかに記載のシステム。
- 前記第1の再構成されたイメージは、オリジナルまたはフーリエ変換の導関数、線追跡法、モデルまたは輪郭ベースの反復再構成、材料分解法ベース、スペクトルCT、ART、モンテカルロシミュレーションベース、非空間ベースの再構成法、反復アルゴリズムとその派生物、フィルター法、少なくとも1の修正二変数法、または分割ベースのサブ問題法を含む再構成方法を使用して再構成される、請求項8~21のいずれかに記載のシステム。
- 前記コントローラーは、
各ビームのX線減衰データを逆投影して、データ点の配列を形成し、
逆投影データ点と発散ビームの線源位置との間の距離rに基づいて、各逆投影データ点を重み付け係数ω(r)により重み付けして、重み付け逆投影データ点を形成し、
重み付けされた逆投影データ点を含むデータの配列をフーリエ変換処理し、取得されたk空間データセットを形成し、
前記取得されたk空間データセットを基準k空間と整列させ、
逆フーリエ変換を行うことにより、参照k空間データからイメージを再構成するように構成される、請求項8~22のいずれかに記載のシステム。 - 前記システムは、自律走行装置と一体化されている、請求項1~23のいずれかに記載のシステム。
- 前記システムは、標準的なドアを通れるように構成され、前記複数の検出器は、患者と患者ベッド、手術台、又はイメージング台との間に配置されるように構成される、請求項1~24のいずれかに記載のシステム。
- 前記システムは、スペクトル断層撮影マンモグラフィシステムである、請求項1~25のいずれかに記載のシステム。
- 前記システムは、手元スイッチ、ディスプレイ、手持ちディスプレイ、フットペダル、ディスプレイ膜、ジョイスティック、音声認識、スピーカー、音響ノイズハードウェア、および電子機器とソフトウェアをさらに備え、前記コントローラーは、ハードウェアとソフトウェア処理を統合するために、前記ハードウェアと同期ソフトウェアの一部を制御するように構成されている、請求項1~25のいずれかに記載のシステム。
- 前記システムまたはその構成要素がキットの一部である、請求項1~27のいずれかに記載のシステム。
- 前記システムは、金属材料を分解するための方法、ソフトウェア及びハードウェアを備える、請求項1~28のいずれかに記載のシステム。
- 前記システムは、介入装置またはそのような装置の1つ又は複数の部分、インプラント又は造影剤、微石灰化、造影標識された血管、造影剤を混合された石膏型を材料構成する方法およびハードウェアを含む、請求項1~29のいずれかに記載のシステム。
- 前記造影剤がバリウム又はビスマスを含む、請求項30に記載のシステム。
- 前記造影剤が、従来のCT及び一般X線並びにMRI及びPET及び/又は磁性粒子ベースのイメージングで使用される造影剤の2倍から1000000倍の少ない濃度レベル及び/又はモル数レベルで投与される、請求項30に記載のシステム。
- 前記造影剤が、塩化カルシウム、グルトン酸カルシウム、ヨウ素化試薬、バリウム、ビスマス、ストロンチウム、ガドリウム、PET及び/又はMRIで用いられる造影剤を含む、請求項30に記載のシステム。
- 前記介入装置が、人工心臓弁、RFアブレーションカテーテル、ケージ、ステント、インプラント、または外科用具を含む、請求項30に記載のシステム。
- 前記システムは、Cアーム、又はUアーム、又はCTシステムを備え、又は一般的なX線あるいはトモシンセシスシステムと同様のフットプリントを有する、請求項1~34のいずれかに記載のシステム。
- 前記X線源の1つ又は複数と前記複数の検出器の1つ又は複数とを統合するように構成された第1のシステムマトリックスを備える、請求項1~35のいずれかに記載のシステム。
- 前記第1の位置が、前記複数の検出器と前記少なくとも1つのX線源の元の位置を結ぶ中心軸から、2cm2未満、又は5cm2未満、又は1度未満、又は2度未満、又は3度未満、又は4度未満、又は5度未満、又は6度未満、又は7度未満、又は8度未満、又は10度未満のエリアを備える、請求項1~36のいずれかに記載のシステム。
- 前記距離が、1um未満、又は5um未満、又は10um未満、又は50um未満、又は100um未満、又は160um未満、又は250um未満、又は500um未満、又は1mm未満、又は2mm未満、又は5mm未満、又は1cm未満、又は2cm未満、又は5cm未満である請求項1~37のいずれかに記載のシステム。
- 前記コントローラーは、10s未満、又は5s未満、又は2.5s未満、又は1s未満で前記第1の再構成されたイメージを生成するように構成されている、請求項8~38のいずれかに記載のシステム。
- 従来のCTと比較して、放射線被曝を2倍、又は5倍、又は10倍、又は100倍、又は1000倍、又は10,000倍、又は100,000倍、又は1000,000倍低減するように構成されている、請求項1~39のいずれかに記載のシステム。
- 光学、サーモ、PET、SPECT、超音波および/またはMRIを含む追加のイメージングモダリティを統合するように構成された第2のシステムマトリックスを備える、請求項8~40のいずれかに記載のシステム。
- 前記参照検出器は、前記X線ビーム経路に配置される、請求項41に記載のシステム。
- 前記第1のデータセット及び前記第2のデータセットは、データ取得のための再構成及び前記VOIの決定のためのAIアルゴリズムを訓練するために使用される、請求項42に記載のシステム。
- 前記コントローラーは、前記第1のイメージの再構成後または再構成中に、前記第2のデータセットを使用するように構成される、請求項41~43のいずれかに記載のシステム。
- 前記第2のデータセットが前記第1のイメージの再構成後に使用される場合、前記第1の再構成は、前記第2のデータセットを組み込んだ第2の再構成において使用されるモデル又は輪郭又はデータを提供する、請求項44に記載のシステム。
- 前記第2のデータセットが前記第1のイメージの再構成中に使用される場合、前記コントローラーは、同じ又は異なるシステムマトリックス及び修正変数及び分割サブ問題方法を使用するよう構成される、請求項45に記載のシステム。
- 前記第2のデータセットは、前記第1のデータセットを生成する1つ又は複数のX線イメージに対する取得時刻と同じ時刻に撮影する前記複数の検出器のうちの異なる検出器から導出されたデータを含む、請求項43~46のいずれかに記載のシステム。
- 前記異なる検出器は、前記第1のデータセットが取得された前記第1の検出器の上流又は下流又は同じ空間位置に配置された少なくとも1つの検出器を含む、請求項47に記載のシステム。
- 前記第2のデータセットが、前記第1のデータセットを生成する1つまたは複数のX線イメージの取得時刻とは異なる時刻に取得されたX線測定からのデータを含む、請求項43~48のいずれかに記載のシステム。
- 前記第2のデータセットが、前記第1のデータセットが取得された第1の検出器によって、異なる時間に取得されるデータを含む、請求項43~49のいずれかに記載のシステム。
- 前記第1及び/又は第2のデータセットが、ケースバイケースで、イメージ再構成の間、前、又は後にノイズ除去されるように構成される、請求項43~50のいずれかに記載のシステム。
- 前記ノイズ除去処理は、物質又は前記VOIに対して選択的に行われる、請求項51に記載のシステム。
- 前記第1及び/又は第2のデータセットが正規化される、請求項43~52のいずれかに記載のシステム。
- 前記取得システムは、イメージ再構成中にデータを選択的に取得するように構成される、請求項8~53のいずれかに記載のシステム。
- 前記選択的データ取得は、第1のデータセットの再構成結果、または選択されたVOIに基づいており、前記再構成は前記選択されたVOIについて優先される、請求項54に記載のシステム。
- X線イメージ、及び関連する製品及びサービスのための支払い及び取引電子システムであって、
購入者及びユーザーのためのソフトウェアプラットフォームと、
メータ情報をイメージング位置上またはクラウドを介して収集するように構成されたデータ収集機構を備え、
前記ソフトウェアプラットフォームは、
少なくとも1つの位置で行われたX線イメージまたは関連する処置の測定情報を含む電子データベースと、
データを暗号化するように構成されたデータ暗号化機構、および通貨の転送、通信と、
暗号通貨を含むデジタル通貨であって、買い手と売り手が合意した前記デジタル通貨又は交換媒体と、
少なくとも1つの設備から前記メータ情報を収集するように構成されたサーバと、
前記メータ情報を前記イメージング位置またはクラウド経由で収集するように構成されたデータ収集機構、を含み、
デジタル通貨で定期的に課金される金額が、購入者のアカウントからの定期購入及び/又はイメージごとの支払いモデルに基づいている、システム。 - ユーザー名とパスワードの入力とサインインと登録と関連情報を許可するモバイルアプリ、デスクトップアプリまたはウェブポータル、および開発者ポータルを有するフロントエンドプレゼンテーションと、
コアバンキングシステム、顧客データおよびその他のバックオフィス関連処理が配置されている商品レイヤーを含むバックエンドと、
前記フロントエンドと前記バックエンドおよびAPIレイヤーの間で情報を調整する仲介層を含むミドルウェアとを含む販売者用ソフトウェアプラットフォームをさらに含む請求項56に記載のシステム。 - 前記販売者用ソフトウェアプラットフォームは、外部及び/又は第三者のアプリケーションへの接続を可能にするように構成され、該アプリケーションは会計ソフトウェア、顧客及び/又はユーザーアカウント、ローン、支払い、マーケットプレイス、デジタルオンボーディング、支払いネットワーク、カード及びカード管理などを含む、請求項57に記載のシステム。
- 前記販売者はデジタルバンク、又はデジタルバンクと提携して、ユーザーおよび/または顧客の口座番号に基づいて、電子メール、電話経由で、電送、ACH送金、および/または経由のデジタル銀行送金を可能とする、請求項56~58のいずれかに記載のシステム。
- 前記X線イメージは、散乱除去X線イメージングシステム、スペクトルX線イメージングシステム、CT、スペクトルCT、1つ又は複数の放射線サービス、AI関連ソフトウェア、pac、イメージ保存、及び/又はイメージ処理によって作成されたイメージを含む、請求項56~59のいずれかに記載のシステム。
- X線システムを用いて物体のVOIの3Dイメージを再構成する方法であって、
前記X線システムは、少なくとも1つのX線源と少なくとも1つの検出器とを備え、
前記方法は、
前記少なくとも1つのX線源及び/又は前記複数の検出器のうちの1つ以上を並進及び/又は回転させるステップと、
システムマトリックスを用いて、投影測定値を、少なくとも1つのX線源及び少なくとも1つの検出器の様々な位置と相関させるステップとを含み、
少なくとも1つの2次元投影イメージについて、前記少なくとも1つのX線源は、前記VOI内の各ボクセルのために前記複数の検出器の1つに到達する新しい投影経路が存在するように、前記VOIの少なくとも大半又はほぼ全体を照射するビームを放出するように構成され、および
前記放出位置同士間の各移動により、およそm×n個の投影経路が存在し、
前記移動は、前記少なくとも1つのX線源のX線管と前記少なくとも1つの検出器とを結び前記VOIを通過する軸線に沿った所望の解像度にほぼ等しいものであり、
前記新しい投影経路が前記m×n個の投影経路の残りと少なくとも約1ボクセルだけ異なるようにされ、またはVOI内の各ボクセルが他の経路と少なくとも約1ボクセルだけ異なる投影経路を有するようにされる、方法。 - 投影の総数が、前記VOIの厚さによって近似される、請求項61に記載の方法。
- 投影の総数が、センサー、カメラ、又はX線イメージ露出値、又は飛行時間センサーの幾何学的測定値によって近似され、
該近似は、
VOIを含む前記対象の上部から少なくとも1つの線源までの少なくとも距離を決定するステップと、
前記対象の前記上部から少なくとも1つのX線源までの距離を線源-検出器間距離(SID)から減算するステップと、
VOIの厚さを導出すること、を含む、請求項61に記載の方法。 - X線被曝レベルが、自動被曝方法及び装置、前記飛行時間検出器、及び/又は参照検出器によって近似される、請求項63に記載の方法。
- 中心軸から5度未満、又は4度未満、又は3度未満、又は2度未満、又は1度未満による総回転X線放出位置角度を有する、請求項63または64に記載の方法。
- X線放出ビーム体積の視野を拡大する、または投影イメージを結合する、及び/又は既存のアプリケーション要件による移動の柔軟性を拡大するために、別の移動軌道、管回転角度、又は検出器角度と組み合わせられるように構成されている、請求項61~65のいずれかに記載の方法。
- 前記要件は、前記対象の角度的及び並進的な移動又は前記VOIの移動を含む、請求項66に記載の方法。
- 各移動は、前記VOIの各ボクセルのための新しい投影経路を導入するように構成される、請求項61~67のいずれかに記載の方法。
- 前記X線は、同じ位置または異なる放出位置から放出される、請求項61~68のいずれかに記載の方法。
- 前記X線システムが1よりも多くの線源を備え、各線源は断層撮影が可能である、請求項61~69のいずれかに記載の方法。
- 前記1よりも多くの光源が使用されるように構成され、同じシステムマトリックスで表され、各線源は、前記VOIの投影イメージを生成するために複数の放出位置を有するか、または移動するように構成され、前記投影イメージは、他のイメージと組み合わされて前記VOIの前記3Dイメージを再構成する、請求項70に記載の方法。
- 各線源は、VOIの少なくとも1つの部分の投影イメージを投影するように構成され、3D再構成は2つまたはそれ以上の複数の投影イメージのセットから導出され、各セットが少なくとも各線源によって生成される、請求項71に記載の方法。
- 同じシステムマトリックスが異なる線源を含み、前記測定されたデータは、より正確な仮の3D再構成を確立するために組み合わされる、請求項72に記載の方法。
- 前記3D再構成イメージが前記VOIを含み、
該VOIは、
異なる解像度またはエネルギーレベルまたはスペクトルイメージまたはシングルエネルギーイメージまたは少なくとも1つ以上の異なるX線放出位置での3D再構成の、以前の3D再構成によって決定される、請求項61~73のいずれかに記載の方法。 - 前記投影されたイメージが、前記空間領域での補間を含む散乱除去方法でイメージ処理され、及び/又は可動ビーム粒子ストッパー配列及び/又はビーム粒子ストッパープレート又は可動ビームセレクタを有する積層検出器方法を使用する、請求項74に記載の方法。
- 少なくとも1つの関心物質又は複合関心物質について導出された前記減衰値及び/又は密度情報は、3Dイメージの再構成に含まれる、請求項74または75に記載の方法。
- 最終的な3D再構成が前記VOIを決定するために使用される、請求項61~76のいずれかに記載の方法。
- 前記X線システムは直立に取り付けられる、請求項61~77のいずれかに記載の方法。
- 前記X線システムはCアーム又はUアームに取り付けられる、請求項78に記載の方法。
- 前記投影イメージが、前記対象を組み合わせた3D再構成イメージ上の異なるVOIに位置し、より大きな体積を有する3Dイメージをもたらす、請求項72~79のいずれかに記載の方法。
- VOIを照射し、複数の検出器で検出された物体のVOIから外に出る放射線の強度を表す投影データ、または、第1検出器で検出された放射線および参照検出器で検出された放射線から導出される、前記VOIに入る放射線強度に対する前記強度の比率を表す投影データ、を取得し、
前記得られた投影データに基づいて、第1のデータセットおよび少なくとも第2のデータセットを生成するように構成されるコントローラーを備え、
前記第1のデータセットは前記第1検出器によって生成されたデータを含み、前記少なくとも第2のデータセットは前記第1検出器または第2検出器によって生成されたデータを含み、前記投影データは異なる放射線放出位置、エネルギーレベル、露出レベル、および/または異なるシステム構成からもたらされる、X線イメージ装置。 - 前記コントローラーは、同じ第1検出器、または同じ第2検出器、または追加の検出器によって生成されたデータを含むより多くのデータセットを生成するように構成される、請求項81に記載の装置。
- 単一の放射線源であって、異なる放出位置、異なる焦点スポットサイズ、及び/又は視野制限装置若しくはコリメータによる異なる視野を有する、請求項81または82に記載の装置。
- 第1及び第2の放射線源を備え、前記第2の放射線源は、前記第1の放射線源とは異なる放射線源であるが、前記第1の放射線源の放出位置と同じエリアを進行し、前記第2の放射線源によって放出される放射線は、異なる焦点サイズ、及び/又は異なるエネルギーレベル及び/又はパルス発生速度である、請求項81または82に記載の装置。
- 第1及び第2検出器を備え、前記第1検出器は、前記第2検出器と異なる検出器構成を有する、請求項84に記載の装置。
- 第3以上検出器を備え、前記第1検出器と前記第2検出器、および前記第3以上の検出器のそれぞれの検出器構成は、検出器タイプによって決定される、請求項85に記載の装置。
- 投影ジオメトリ及び/又はピクセル要素が、第1検出器内及び第2検出器内のそれぞれに配置され、前記コントローラーは、前記複数のデータセットを使用して結合イメージを再構成するように構成される、請求項84~86のいずれかに記載の装置。
- 前記複数のデータセットの各データセットは、前記複数のデータセットに対応するそれぞれの投影ジオメトリを表すそれぞれのシステムマトリクス方程式に対応する、請求項87に記載の装置。
- 前記複数のデータセットの各データセットは、前記複数のデータセットに対応するそれぞれの投影ジオメトリを表すほぼ同じまたは類似のシステムマトリックス方程式または異なるシステムマトリックス方程式に対応する、請求項87に記載の装置。
- 前記イメージは、
低散乱VOIと、
時間領域での散乱を除去した飛行時間一次計測を使用することと、
低解像度散乱イメージの補間から導出される高解像度散乱の減算から得られる一次X線イメージを含む散乱除去方法を使用することと、
ARTまたはその派生アルゴリズム、および/または反復法を使用することと、
の1つ以上のことによって、
1%未満又は5%未満の主対散乱率のデータを含む複数のデータセットで、同じシステムマトリックスを使用して再構成される、請求項87~89のいずれかに記載の装置。 - 前記イメージは、複数のデータセットによる異なるシステムマトリックスを使用して、少なくとも1つの修正デュアル変数で、および分割に基づくサブ問題法を使用して再構成される、請求項87~89のいずれかに記載の装置。
- 前記イメージは、複数のデータセットによる同じシステムマトリックスを使用して、少なくとも1つの修正二変数で、および分割に基づくサブ問題法を使用して再構成される、請求項87~89のいずれかに記載の装置。
- データ生成の時間によって分離された前記データセットに関してサブ問題が実行される、請求項81~92のいずれかに記載の装置。
- 少なくとも1つの追加データセットをさらに含む、請求項81~93のいずれかに記載の装置。
- 前記システムマトリックスが、光学センサー及びカメラの前記使用を取り入れ、表面イメージを使用するAIおよび前記ROIを選択するAIによってガイドされる、請求項88に記載の装置。
- ノイズを低減するために使用されるAIソフトウェアを備える、請求項81~95のいずれかに記載の装置。
- 前記イメージが1%SPR未満または5%SPR未満に散乱除去されており、シミュレーションにおいて散乱を考慮する必要性を回避する、請求項81~96のいずれかに記載の装置。
- X線源によって第1の位置から第2の位置へ移動した距離が、第1の位置から5cm未満、または前記第1の位置よりも2平方cm未満、または5平方cm未満、または1平方cm未満、および平方4cm未満、または3平方cm未満、および/または3平方cm未満である、請求項81-97のいずれかに記載の装置。
- 前記第2の位置で放出されたX線は、前記第1の位置からのX線と同じ体積又は6D空間位置で進むように構成されている、請求項98に記載の装置。
- 前記X線源は、前記X線フィラメント管又は他のタイプのX線源と同じ空間位置でX線を放出するフィールドエミッタ、または、焦点サイズ、エネルギーレベル、フレームレート、及び/またはジオメトリを含む同じまたは異なるパラメータを有する前記様々なタイプの線源、またはその変調バージョンであり、または異なるX線オプティクスによって操作され、または異なるメカニズムによって操向され、同じ空間マトリクス、修正されたデュアルまたはマルチ変数法、または分割サブ問題法が使用され得る、請求項98に記載の装置。
- 前記システムマトリックスを用いて、本発明のX線システムと組み合わせた光学的方法を使用する、請求項88に記載の装置。
- 前記システムマトリックスにベクトルが使用される、請求項88に記載の装置。
- 前記コントローラーは、デュアルエネルギーまたはマルチエネルギーX線を使用して、ピクセル単位で前記投影イメージ内のおおよそのエリアおよび分布を決定するように構成される、請求項81~102のいずれかに記載の装置。
- 前記データセットは、3Dイメージを再構成するために使用される、請求項81~103のいずれかに記載の装置。
- 前記コントローラーが、前記材料体積及び空間分布をセグメント化し、及び/又は材料分解を実行するように構成されている、請求項81~104のいずれかに記載の装置。
- 前記コントローラーが、さらなるスペクトルイメージングのための再構成の前及び/又は後に前記ROIを決定するように構成されている、請求項81~105のいずれかに記載の装置。
- 前記コントローラーは、線源及び/又は検出器の動きを断層撮影システムの移動と組み合わされるように構成されている、請求項81~106のいずれかに記載の装置。
- 前記コントローラーは、造影剤分解を実行するように構成されている、請求項81~107のいずれかに記載の装置。
- 前記コントローラーは、X線吸収材料を識別するために、デュアルエネルギー分解又はマルチエネルギー分解を実行するように構成されている、請求項81~107のいずれかに記載の装置。
- 前記X線吸収材料は、
バリウムと混合された金属または石膏の型と、
1つ又は複数の材料で作られ、および/または異なるX線吸収特性または原子番号zで作られたルーメンおよびシースを有し、またはX線透明材料で挟み込まれた特定の空間位置に分布したX線吸収材料で作られ、同じカテーテルやインプラント内の背景や他のセグメントと比較してその空間分布を決定するのに十分な、あるいは、あるセグメントと他のセグメントを区別するのに十分な、ピクセル単位で十分に特徴付けられたX線吸収特性を含むカテーテル及び/又はインプラントと、
石膏型と、
血管と、
造影剤で標識された血管と、
微小石灰化、及び/又は、造影剤で標識された分子と、
を備える、請求項109に記載の装置。 - 前記コントローラーは、ノイズを除去するように訓練されたAIソフトウェアを用いてノイズ除去するように構成されている、請求項81~110のいずれかに記載の装置。
- 前記コントローラーは、再構成のためのAIアルゴリズムの訓練において生成されたデータを使用するように構成される、請求項81~111のいずれかに記載の装置。
- 本装置は断層撮影装置の一部である、請求項81~112のいずれかに記載の装置。
- 前記対象はX線透過性のテーブルまたはベッドに積載され、該テーブルまたはベッドは断層撮影装置の検出器ガントリーの上に置かれる、請求項113に記載の装置。
- 患者が、X線透過性である検出器ガントリーの表面上に横たわるように構成される、請求項113に記載の装置。
- 本装置又はその一部が、クリニック内又は病院外の遠隔地へ搬送されるように自律走行装置に接続する可搬型である、請求項113~115のいずれかに記載の装置。
- 標準的なドアの開口部の寸法より小さい、請求項113~116のいずれかに記載の装置。
- ポイント・オブ・ケア装置として使用され、及び/又は患者の部屋で使用される、請求項113~117のいずれかに記載の装置。
- 可動式で患者のベッドと患者の間に置くことができる検出器モジュールを備える、請求項113~118のいずれかに記載の装置。
- 前記コントローラーは、ビーム粒子ストッパー再構成法を用いて材料分解を行うように構成される、請求項81~119のいずれかに記載の装置。
- 前記ビーム粒子ストッパー再構成手段は、同じX線放出位置で撮影されたイメージから、一次X線が遮断された異なるビーム粒子ストッパー配列位置でデータギャップを埋め合わす構成を有する、請求項120に記載の装置。
- 前記ビーム粒子ストッパー再構成方法は、再構成処理中にデータギャップを埋めることを備え、前記ビーム粒子ストッパーから外れた各投影経路は、データ入力がないものとして記述され、したがって、同じX線放出位置から生成するために余分の投影データを必要とし、または疎らなデータ3D再構成アルゴリズムを使用する、請求項120に記載の装置。
- 前記コントローラーがカテーテルまたはインプラントの前記おおよその密度および/または厚さを知っている場合、前記材料分解は、互いに重なり合う1つまたは複数の物質からなる前記カテーテルまたはインプラント内の金属および/または他の吸収材料に対して実行される、請求項120に記載の装置。
Applications Claiming Priority (69)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201962940682P | 2019-11-26 | 2019-11-26 | |
| US62/940,682 | 2019-11-26 | ||
| US201962941728P | 2019-11-28 | 2019-11-28 | |
| US62/941,728 | 2019-11-28 | ||
| US201962948290P | 2019-12-15 | 2019-12-15 | |
| US62/948,290 | 2019-12-15 | ||
| US201962951458P | 2019-12-20 | 2019-12-20 | |
| US62/951,458 | 2019-12-20 | ||
| US201962954508P | 2019-12-29 | 2019-12-29 | |
| US62/954,508 | 2019-12-29 | ||
| US202062962959P | 2020-01-18 | 2020-01-18 | |
| US62/962,959 | 2020-01-18 | ||
| US202062981545P | 2020-02-26 | 2020-02-26 | |
| US62/981,545 | 2020-02-26 | ||
| US202062990449P | 2020-03-17 | 2020-03-17 | |
| US62/990,449 | 2020-03-17 | ||
| US202062993726P | 2020-03-24 | 2020-03-24 | |
| US62/993,726 | 2020-03-24 | ||
| US202062994869P | 2020-03-26 | 2020-03-26 | |
| US62/994,869 | 2020-03-26 | ||
| US202063019214P | 2020-05-01 | 2020-05-01 | |
| US63/019,214 | 2020-05-01 | ||
| US202063026741P | 2020-05-19 | 2020-05-19 | |
| US63/026,741 | 2020-05-19 | ||
| US202063031573P | 2020-05-29 | 2020-05-29 | |
| US63/031,573 | 2020-05-29 | ||
| US202063040003P | 2020-06-17 | 2020-06-17 | |
| US63/040,003 | 2020-06-17 | ||
| US202063042013P | 2020-06-22 | 2020-06-22 | |
| US63/042,013 | 2020-06-22 | ||
| US202063046712P | 2020-07-01 | 2020-07-01 | |
| US63/046,712 | 2020-07-01 | ||
| US202063050122P | 2020-07-10 | 2020-07-10 | |
| US63/050,122 | 2020-07-10 | ||
| US202063063976P | 2020-08-11 | 2020-08-11 | |
| US63/063,976 | 2020-08-11 | ||
| US202063066170P | 2020-08-15 | 2020-08-15 | |
| US63/066,170 | 2020-08-15 | ||
| US202063073945P | 2020-09-03 | 2020-09-03 | |
| US63/073,945 | 2020-09-03 | ||
| US202063076914P | 2020-09-10 | 2020-09-10 | |
| US63/076,914 | 2020-09-10 | ||
| US202063078004P | 2020-09-14 | 2020-09-14 | |
| US63/078,004 | 2020-09-14 | ||
| US202063078946P | 2020-09-16 | 2020-09-16 | |
| US63/078,946 | 2020-09-16 | ||
| US202063081344P | 2020-09-22 | 2020-09-22 | |
| US63/081,344 | 2020-09-22 | ||
| US202063084019P | 2020-09-28 | 2020-09-28 | |
| US63/084,019 | 2020-09-28 | ||
| US202063087185P | 2020-10-03 | 2020-10-03 | |
| US63/087,185 | 2020-10-03 | ||
| US202063087227P | 2020-10-04 | 2020-10-04 | |
| US63/087,227 | 2020-10-04 | ||
| US202063093320P | 2020-10-19 | 2020-10-19 | |
| US63/093,320 | 2020-10-19 | ||
| US202063105912P | 2020-10-27 | 2020-10-27 | |
| US63/105,912 | 2020-10-27 | ||
| US202063106908P | 2020-10-29 | 2020-10-29 | |
| US63/106,908 | 2020-10-29 | ||
| US202063107462P | 2020-10-30 | 2020-10-30 | |
| US63/107,462 | 2020-10-30 | ||
| US202063108291P | 2020-10-31 | 2020-10-31 | |
| US63/108,291 | 2020-10-31 | ||
| US202063110986P | 2020-11-07 | 2020-11-07 | |
| US63/110,986 | 2020-11-07 | ||
| US202063113258P | 2020-11-13 | 2020-11-13 | |
| US63/113,258 | 2020-11-13 | ||
| PCT/US2020/062426 WO2021108715A1 (en) | 2019-11-26 | 2020-11-25 | X-ray imaging system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023503638A true JP2023503638A (ja) | 2023-01-31 |
| JPWO2021108715A5 JPWO2021108715A5 (ja) | 2023-12-04 |
Family
ID=76130421
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022531392A Pending JP2023503638A (ja) | 2019-11-26 | 2020-11-25 | 改良されたx線イメージングシステム |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US20230011644A1 (ja) |
| EP (1) | EP4064995A1 (ja) |
| JP (1) | JP2023503638A (ja) |
| KR (1) | KR20220106811A (ja) |
| CN (1) | CN114867416A (ja) |
| AU (1) | AU2020392235A1 (ja) |
| CA (1) | CA3158053A1 (ja) |
| IL (1) | IL292916A (ja) |
| WO (1) | WO2021108715A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024180606A1 (ja) * | 2023-02-27 | 2024-09-06 | 株式会社システムスクエア | X線検査装置及びプログラム |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2019210305A1 (en) | 2018-01-22 | 2020-08-13 | Xenselab, Llc | Methods for x-ray imaging of a subject using multiple-energy decomposition |
| JP7530832B2 (ja) | 2018-03-19 | 2024-08-08 | センスラボ エルエルシー | X線断層撮影法 |
| WO2021003344A1 (en) * | 2019-07-03 | 2021-01-07 | Northwestern University | Miniaturized, light-adaptive, wireless dosimeter systems for autonomous monitoring of electromagnetic radiation exposure and applications of same |
| CN112964738B (zh) * | 2021-01-29 | 2022-11-22 | 山东大学 | 一种工业ct快速扫描系统及方法 |
| KR20220128800A (ko) * | 2021-03-15 | 2022-09-22 | 에스케이하이닉스 주식회사 | 파노라마 이미지 생성 장치 및 방법 |
| US11710218B2 (en) * | 2021-03-17 | 2023-07-25 | GE Precision Healthcare LLC | System and method for normalizing dynamic range of data acquired utilizing medical imaging |
| US11633168B2 (en) * | 2021-04-02 | 2023-04-25 | AIX Scan, Inc. | Fast 3D radiography with multiple pulsed X-ray sources by deflecting tube electron beam using electro-magnetic field |
| US11782176B2 (en) * | 2021-04-23 | 2023-10-10 | Canon Medical Systems Corporation | Bad detector calibration methods and workflow for a small pixelated photon counting CT system |
| CN113284210B (zh) * | 2021-06-07 | 2024-03-22 | 中国原子能科学研究院 | Tgs透射图像重建方法、装置、介质和电子设备 |
| USD981565S1 (en) | 2021-06-21 | 2023-03-21 | Xenselab Llc | Medical imaging apparatus |
| CN114051106B (zh) * | 2021-10-29 | 2022-08-02 | 中国科学院西安光学精密机械研究所 | 一种空间光谱滤波频域重建高速成像系统及方法 |
| CN114022615B (zh) * | 2021-11-10 | 2024-05-17 | 中国科学院自动化研究所 | 基于贝叶斯框架的三维磁粒子成像重建方法、系统和设备 |
| CN113936746B (zh) * | 2021-12-16 | 2022-02-22 | 中国工程物理研究院流体物理研究所 | 多原子体系射线衍射的快速分析方法、系统、终端及介质 |
| WO2023133548A1 (en) * | 2022-01-09 | 2023-07-13 | Stryker Stefan Matthias | Apparatus and method for in vivo breast tissue imaging using coded aperture x-ray scatter tomography |
| WO2023141209A1 (en) * | 2022-01-19 | 2023-07-27 | Sacramento Radiology Services, Inc. | X-ray imaging with energy sensitivity |
| US12086963B2 (en) * | 2022-02-22 | 2024-09-10 | GE Precision Healthcare LLC | System and method for dynamic phase correction for x-ray phase-contrast imaging |
| EP4246526A1 (en) * | 2022-03-17 | 2023-09-20 | Koninklijke Philips N.V. | System and method for providing enhancing or contrast agent advisability indicator |
| WO2023183640A1 (en) * | 2022-03-25 | 2023-09-28 | Rensselaer Polytechnic Institute | Motion correction with locally linear embedding for helical photon-counting ct |
| WO2023201056A1 (en) * | 2022-04-15 | 2023-10-19 | Calidar, Inc. | System and method for in vivo tissue imaging using coded aperture x-ray scatter tomography |
| WO2023205358A1 (en) * | 2022-04-20 | 2023-10-26 | Arion Diagnostics, Inc. | Diffractive analyzer of patient tissue |
| US20230389892A1 (en) * | 2022-06-02 | 2023-12-07 | Canon U.S.A., Inc. | Devices, systems, and methods for automated delay detection between medical-imaging devices |
| CN115641455B (zh) * | 2022-09-16 | 2024-01-09 | 杭州视图智航科技有限公司 | 一种基于多特征融合的图像匹配方法 |
| CN115424082B (zh) * | 2022-10-31 | 2023-03-21 | 杭州三坛医疗科技有限公司 | 一种图像处理方法、装置及电子设备 |
| WO2024108257A1 (en) * | 2022-11-24 | 2024-05-30 | Southern Innovation International Pty Ltd | Density measuring |
| KR102571666B1 (ko) * | 2022-11-30 | 2023-08-28 | (주)모아소프트 | 개선된 구조를 갖는 cr 리더장치 |
| CN115837994A (zh) * | 2023-02-16 | 2023-03-24 | 国网山西省电力公司电力科学研究院 | 一种基于mems陀螺仪的吊舱姿态检测及图像补偿装置及方法 |
| CN116206740B (zh) * | 2023-03-07 | 2023-12-26 | 上海熙软科技有限公司 | 基于医院总账的财物数据管理系统 |
| EP4443198A1 (en) * | 2023-04-07 | 2024-10-09 | Koninklijke Philips N.V. | X-ray system with modular two-layer detector |
| CN116188617B (zh) * | 2023-04-21 | 2023-08-08 | 有方(合肥)医疗科技有限公司 | Ct图像数据处理方法、装置及ct系统 |
| CN116196022B (zh) * | 2023-04-28 | 2023-08-04 | 之江实验室 | 扇形x光束穿过介质时的通量分布计算方法和系统 |
| CN116883291B (zh) * | 2023-09-06 | 2023-11-17 | 山东科技大学 | 一种基于二元傅里叶级数的畸变校正方法 |
| CN116975769B (zh) * | 2023-09-22 | 2023-12-22 | 南京国睿信维软件有限公司 | 用于状态监测实时预警的自适应多维度异常值检测方法 |
| CN118121218B (zh) * | 2024-03-04 | 2024-08-09 | 苏州仰视科技有限公司 | X-ray主动反馈闭环智能系统 |
| CN118033720B (zh) * | 2024-04-12 | 2024-08-13 | 华硼中子科技(杭州)有限公司 | 准直型spect探测器贡献系数获取方法、终端及介质 |
| CN118566266B (zh) * | 2024-08-01 | 2024-10-01 | 中铁电气化铁路运营管理有限公司 | 基于x射线的供电设备内部缺陷无损检测方法及系统 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6052433A (en) | 1995-12-29 | 2000-04-18 | Advanced Optical Technologies, Inc. | Apparatus and method for dual-energy x-ray imaging |
| US5648997A (en) | 1995-12-29 | 1997-07-15 | Advanced Optical Technologies, Inc. | Apparatus and method for removing scatter from an x-ray image |
| US5771269A (en) | 1995-12-29 | 1998-06-23 | Advanced Optical Technologies, Inc. | Apparatus and method for removing scatter from an x-ray image |
| US9339243B2 (en) * | 2006-04-14 | 2016-05-17 | William Beaumont Hospital | Image guided radiotherapy with dual source and dual detector arrays tetrahedron beam computed tomography |
| JP7530832B2 (ja) | 2018-03-19 | 2024-08-08 | センスラボ エルエルシー | X線断層撮影法 |
-
2020
- 2020-11-25 CN CN202080090075.7A patent/CN114867416A/zh active Pending
- 2020-11-25 CA CA3158053A patent/CA3158053A1/en active Pending
- 2020-11-25 WO PCT/US2020/062426 patent/WO2021108715A1/en unknown
- 2020-11-25 EP EP20829419.9A patent/EP4064995A1/en active Pending
- 2020-11-25 JP JP2022531392A patent/JP2023503638A/ja active Pending
- 2020-11-25 KR KR1020227021981A patent/KR20220106811A/ko unknown
- 2020-11-25 AU AU2020392235A patent/AU2020392235A1/en active Pending
-
2022
- 2022-05-10 IL IL292916A patent/IL292916A/en unknown
- 2022-05-24 US US17/664,855 patent/US20230011644A1/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024180606A1 (ja) * | 2023-02-27 | 2024-09-06 | 株式会社システムスクエア | X線検査装置及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230011644A1 (en) | 2023-01-12 |
| EP4064995A1 (en) | 2022-10-05 |
| KR20220106811A (ko) | 2022-07-29 |
| WO2021108715A1 (en) | 2021-06-03 |
| AU2020392235A1 (en) | 2022-06-02 |
| CA3158053A1 (en) | 2021-06-03 |
| IL292916A (en) | 2022-07-01 |
| CN114867416A (zh) | 2022-08-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20230011644A1 (en) | X-ray imaging system | |
| JP7443331B2 (ja) | X線イメージング及び造影剤のための装置及び方法 | |
| Beckmann | CT scanning the early days | |
| JP2021142326A (ja) | ディープ畳み込みニューラルネットワークを使用してコーンビームコンピュータ断層撮影画像を改善する方法 | |
| US20210000436A1 (en) | Methods for x-ray imaging of a subject using multiple-energy decomposition | |
| EP4346608A1 (en) | X-ray imaging system and method | |
| Prall et al. | High-energy proton imaging for biomedical applications | |
| FR2839894A1 (fr) | Procedes, appareils de cyclotherapie image-guidee et mode d'obtention d'images scanographiques diagnostiques instantanees pour la planification et la dosimetrie en ligne | |
| Dullin et al. | Multiscale biomedical imaging at the SYRMEP beamline of Elettra-Closing the gap between preclinical research and patient applications | |
| Abadi et al. | Development of a scanner-specific simulation framework for photon-counting computed tomography | |
| US20170329929A1 (en) | Virtual pathology for dermatology | |
| Staufer et al. | Review of development and recent advances in biomedical X-ray fluorescence imaging | |
| CN118102978A (zh) | X射线成像系统和方法 | |
| Zhao et al. | Optimization of cone-beam CT scan orbits for cervical spine imaging | |
| Villa et al. | Fast dose calculation in x-ray guided interventions by using deep learning | |
| Vasyltsiv et al. | Feasibility of 4D HDR brachytherapy source tracking using C-arm tomography: Monte Carlo investigation | |
| Sharma et al. | Study of image qualities from 6D robot–based CBCT imaging system of small animal irradiator | |
| Sidebottom et al. | Contrast-enhanced proton radiographic sensitivity limits for tumor detection | |
| US11717239B2 (en) | Providing a 3D image dataset of an examination object | |
| Labora et al. | Calibration of a C-arm X-ray system for its use in tomography | |
| Rubin et al. | Reconstruction method for x-ray imaging capsule | |
| Volz et al. | Focus stacking single-event particle radiography for high spatial resolution images and 3D feature localization | |
| Moss et al. | Use of Photon Scattering Interactions in Diagnosis and Treatment of Disease | |
| Nikolova et al. | Physics and Engineering-Unlocking Doors in Medicine Together | |
| Schmidt et al. | Physics of Medical Imaging |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231124 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241008 |