JP2023079321A - 肌処理装置 - Google Patents
肌処理装置 Download PDFInfo
- Publication number
- JP2023079321A JP2023079321A JP2021192736A JP2021192736A JP2023079321A JP 2023079321 A JP2023079321 A JP 2023079321A JP 2021192736 A JP2021192736 A JP 2021192736A JP 2021192736 A JP2021192736 A JP 2021192736A JP 2023079321 A JP2023079321 A JP 2023079321A
- Authority
- JP
- Japan
- Prior art keywords
- mode
- electrodes
- output waveform
- distance
- circumference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/06—Electrodes for high-frequency therapy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/20—Applying electric currents by contact electrodes continuous direct currents
- A61N1/30—Apparatus for iontophoresis, i.e. transfer of media in ionic state by an electromotoric force into the body, or cataphoresis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Electrotherapy Devices (AREA)
Abstract
【課題】装置が当接するユーザの肌の当接領域全体にわたり均一で良好な肌処理効果を付与可能な電極配置を実現する。【解決手段】ユーザの肌に当接可能な複数の電極群を有する肌処理装置であって、複数の電極群は、第1電極群と、第2電極群と、を含み、第1電極群は、第1円周に沿って第1所定角度ごとに配置される複数の第1電極を含み、第2電極群は、第1円周と同心かつ第1円周より径が大きい第2円周に沿って第2所定角度ごとに配置される複数の第2電極を含む、肌処理装置が開示される。【選択図】図3
Description
本開示は、肌処理装置に関する。
低周波電極と高周波電極とを備える肌処理装置において、低周波電極を略半円形にし、2つの低周波電極が構成する円形の内部に高周波電極対を設けて、高周波電圧が印加された部位に対し確実に低周波電圧を印加するようにした技術が知られている(例えば、特許文献1)。
しかしながら、上記のような従来技術の電極配置では、装置が当接するユーザの肌の当接領域全体にわたり均一で良好な美容関連効果を付与することが難しい。
そこで、本開示は、ユーザの肌に対して、装置が当接するユーザの肌の当接領域全体にわたり均一で良好な肌処理効果を付与可能な電極配置を実現することを目的とする。
1つの側面では、ユーザの肌に当接可能な複数の電極群を有する肌処理装置であって、
前記複数の電極群は、第1電極群と、第2電極群と、を含み、
前記第1電極群は、第1円周に沿って第1所定角度ごとに配置される複数の第1電極を含み、
前記第2電極群は、前記第1円周と同心かつ前記第1円周より径が大きい第2円周に沿って第2所定角度ごとに配置される複数の第2電極を含む、肌処理装置が提供される。
前記複数の電極群は、第1電極群と、第2電極群と、を含み、
前記第1電極群は、第1円周に沿って第1所定角度ごとに配置される複数の第1電極を含み、
前記第2電極群は、前記第1円周と同心かつ前記第1円周より径が大きい第2円周に沿って第2所定角度ごとに配置される複数の第2電極を含む、肌処理装置が提供される。
本開示によれば、ユーザの肌に対して、装置が当接するユーザの肌の当接領域全体にわたり均一で良好な肌処理効果を付与可能な電極配置を実現することが可能となる。
以下、添付図面を参照しながら各実施例について詳細に説明する。
図1は、本実施例の肌処理装置1の外観を示す斜視図であり、図2は、図1の肌処理装置1の2面図であり、左側が側面視であり、右側が正面視である。図3は、肌処理装置1のヘッド部3の説明図であり、電極配置に係る各種パラメータの説明図である。
本実施例の肌処理装置1は、美顔器の形態であり、ユーザの顔部の肌に美容関連効果を付与するように構成される。ただし、変形例では、肌処理装置1は、ユーザの顔部に加えて又は代えて、ユーザの顔部以外に同様の美容関連効果を付与するように構成されてもよい。また、肌処理装置1は、美容関連効果とは異なる効果(例えば医薬品の経皮吸収の促進効果)を付与するために利用されてもよい。
美容関連効果は、任意であり、たるみの解消や、引き締め、脂肪燃焼、リフトアップ、小顔化、肌のハリやツヤ、潤いの向上又はその類の1つ以上の任意の組み合わせを含んでよい。また、美容関連効果は、数値化可能な効果であってもよいし、数値化可能でない効果であってもよい。
本実施例の肌処理装置1は、ユーザの肌に当接する複数の電極を介して各種出力を付与することで、ユーザの肌に美容関連効果を付与するように構成される。
本実施例の肌処理装置1は、ユーザの手により把持可能な携帯型であるが、固定機器にアーム等を介して可動に支持される可動式に適用されてもよい。
肌処理装置1は、把持部2と、ヘッド部3とを含む。この場合、ユーザは、把持部2を挟持して、ヘッド部3を自身の顔部における所望の部位に当てることで、所望の部位に対して肌処理装置1からの各種出力を付与できる。
把持部2は、ユーザの手で把持されやすい形態を有する。把持部2には、電源のオン/オフボタンやモード切替ボタン、強さ調整ボタン等のような各種ボタンを含むユーザインターフェイス20を含んでよい。なお、各種ボタンは、機械式のボタンであってもよいし、タッチスイッチであってもよい。また、把持部2には、肌処理装置1の状態等を表示する表示部(図示せず)が設けられてもよい。また、把持部2は、ユーザの手に触れる電極(図示せず)が設けられてもよい。
ヘッド部3は、把持部2の端部に設けられる。なお、ヘッド部3は、把持部2に対して固定されてもよいし、取り外し可能であってもよいし、把持部2に対して可動であってもよい。
ヘッド部3は、ユーザの肌に当接可能であり、ユーザの肌に当接されるのに適した形態を有する。例えば、ヘッド部3は、略平面状(比較的大きい曲率半径の曲面状を含む)の当接面3aを有してよい。図2には、側面視で当接面3aの延在方向(基本面)が一点鎖線で示されている。この場合、当接面3aは、側面視で略直線に近似できる平面である。正面視での当接面3aの形態(当接面3aに対して垂直な方向に視たときの形態)は、矩形や円形、楕円形、多角形等のような任意であり、本実施例では、一例として、図2及び図3に示すように、円形である。
ヘッド部3は、当接面3aに配置される複数の電極30を有する。複数の電極30は、ユーザの肌に当接しやすいように、ヘッド部3の当接面3aの基本面よりも僅かに突出した形態であってもよい。
本実施例では、複数の電極30は、ヘッド部3の当接面3aの中心Cを中心として、円環状に配置される。以下、径方向及び周方向に係る用語は、当接面3aを正面視したとき(当接面3aに対して垂直な方向に視たとき)の、当接面3aの中心Cを中心とした円形を基準とする。例えば、径方向内側とは、径方向で当接面3aの中心Cに近い側を表す。また、以下では、複数の電極30の個数や一の電極の単位は、連続した形態を1つとする。
本実施例では、複数の電極30は、属性ごとに複数の電極群を形成し、具体的には、第1電極群31と、第2電極群32とを形成する。なお、他の実施例では、3つ以上の電極群が形成されてもよい。
第1電極群31は、図3に示すように、第1円周31aに沿って第1所定角度θ1ごとに配置される複数の第1電極310を含む。
複数の第1電極310は、互いに同一の形態であってよい。すなわち、複数の第1電極310のそれぞれは、互いに対して、当接面3aの中心Cを中心とした回転対称の形態であってよい。
第1円周31aは、当接面3aの中心Cを中心とした半径r1の円周である。なお、第1円周31aは、複数の第1電極310の配置の説明用の概念であり、複数の第1電極310を通る限り、どのように規定されてもよい。ここでは、第1円周31aは、複数の第1電極310のそれぞれの径方向の略中心を通る円周であるとする。
第1所定角度θ1は、好ましくは、一定であるが、一定でなくてもよい。第1所定角度θ1が一定である場合、複数の第1電極310の数をN1とすると、θ1=2π/N1である。本実施例では、第1所定角度θ1は、一定のπ/4(=90度)であり、複数の第1電極310の数は、4つである。なお、他の実施例では、複数の第1電極310の数は、6つであり、第1所定角度θ1は、一定のπ/3であってもよい。なお、複数の第1電極310の数は、好ましくは、偶数であるが、奇数であってもよい。偶数である場合、複数の第1電極310のうちから、1つのあまり又は重複もなく対の第1電極310を形成でき、各対の第1電極310を同時に動作させることができる。
複数の第1電極310のうちの、周方向で隣り合う任意の2つは、互いに対する離間距離が第1距離d1である。本実施例では、第1距離d1は、一定であるが、上述した第1所定角度θ1と同様、周方向位置に応じて異なってもよい。
本実施例では、複数の第1電極310が上述したように配置されるので、第1電極群31において第1電極310同士が対をなして、所望の出力波形を生成できる。この場合、出力波形は、任意であり、例えば交流波形やパルス状の直流波形であってよい。交流波形の場合、出力波形の周波数帯は、任意であるが、好ましくは、加温作用を有する高周波等である。第1電極310同士が対をなして実現する出力波形のいくつかの例は後述する。なお、本明細書において、特に言及しない限り、高周波とは、10kHzよりも大きい周波数帯を指し、低周波とは、10kHz以下の周波数帯を指す。
第1距離d1は、好ましくは、加温作用(又は加熱作用、以下同様)を有する高周波の出力波形の印加に適するように適合され、後述する第2距離d2よりも小さい。第1距離d1は、好ましくは、1.5mmから4.5mmの間であり、より好ましくは2.0mmから4.0mmの間であり、最も好ましくは2.5mmから3.5mmの間である。この場合、ユーザの肌に適切な加温作用を付与できる。
ここで、周方向で隣り合う任意の2つの第1電極310を対として出力波形を発生させる場合、当該2つの第1電極310間で距離が最小となる経路が、出力波形が実質的に作用する実効経路となりやすい。
この点、本実施例では、複数の第1電極310のうちの、任意の2つの離間距離は、径方向に沿った所定長さの区間SC1にわたって第1距離d1を保つ。これにより、出力波形の実効経路の径方向の幅を、区間SC1に係る径方向の幅(所定長さの)に応じて比較的長くすることができ、出力波形の実効領域(作用領域)を効率的に広げることができる。
より具体的には、複数の第1電極310は、第1円周31aの中心Cを通って交差する2本の直線状の領域(以下、「直線状の離間領域390」と称する)により分離され、直線状の離間領域390の幅は第1距離d1である。この場合、周方向で隣り合う任意の2つの第1電極310を対として出力波形を発生させる場合に、直線状の離間領域390の略全体を出力波形の実効領域(作用領域)とすることができる。
第2電極群32は、図3に示すように、第2円周32aに沿って第2所定角度θ2ごとに配置される複数の第2電極320を含む。
複数の第2電極320は、互いに同一の形態であってよい。すなわち、複数の第2電極320のそれぞれは、互いに対して、当接面3aの中心Cを中心とした回転対称の形態であってよい。
第2円周32aは、当接面3aの中心Cを中心とした半径r2の円周である。なお、第2円周32aは、複数の第2電極320の配置の説明用の概念であり、複数の第2電極320を通る限り、どのように規定されてもよい。ここでは、第2円周32aは、複数の第2電極320のそれぞれの径方向の中心を通る円周であるとする。
第2円周32aの半径r2は、第1円周31aの半径r1よりも大きい。すなわち、第2電極群32は、第1電極群31の径方向外側に配置される。
第2所定角度θ2は、好ましくは、一定であるが、一定でなくてもよい。第2所定角度θ2が一定である場合、複数の第2電極320の数をN2とすると、θ2=2π/N2である。本実施例では、第2所定角度θ2は、一定のπ/3(=120度)であり、複数の第2電極320の数は、3つである。なお、他の実施例では、複数の第2電極320の数は、5つであり、第2所定角度θ2は、一定のπ/5であってもよい。
複数の第2電極320のうちの、周方向で隣り合う任意の2つは、互いに対する離間距離が第2距離d2である。本実施例では、第2距離d2は、一定であるが、上述した第2所定角度θ2と同様、周方向位置に応じて異なってもよい。
本実施例では、複数の第2電極320が上述したように配置されるので、第2電極群32において、周方向で隣り合う第2電極320同士が対をなして、所望の出力波形を生成できる。この場合、出力波形は、任意であり、例えば交流波形やパルス状の直流波形であってよい。この場合、出力波形の周波数帯は、任意であるが、好ましくは、筋電気刺激作用を有する高周波又は低周波である。第2電極320同士が対をなして実現する出力波形のいくつかの例は後述する。
第2距離d2は、好ましくは、筋電気刺激作用を有する高周波又は低周波の出力波形の印加に適するように適合され、上述した第1距離d1よりも大きい。第2距離d2は、好ましくは、5.5mmから15mmの間であり、より好ましくは6.0mmから8.0mmの間であり、最も好ましくは6.5mmから10mmの間である。この場合、ユーザの肌に適切な筋電気刺激作用を付与できる。
ここで、本実施例では、上述したように、第1電極群31においては第1電極310同士が対をなして、各種作用を有する多様な出力波形を生成できるとともに、第2電極群32においては第2電極320同士が対をなして各種作用を有する多様な出力波形を生成できる。このようにして、本実施例によれば、ユーザの肌に対して、肌処理装置1が当接するユーザの肌の当接領域全体にわたり均一で良好な肌処理効果を付与可能な電極配置を実現できる。
以下では、第2電極320同士が対をなして又は第1電極310同士が対をなして、肌内へと有効成分(美容成分)を浸透させる作用(以下、単に「浸透作用」とも称する)を有する出力波形を生成する出力モードを、「浸潤モードM1」と称し、第1電極310同士が対をなして、肌内へとイオン(有効成分に係るイオン)を導入する作用を有する出力波形を生成する出力モードを、「イオン導入モードM2」と称し、第1電極310同士が対をなして、加温作用を有する高周波の出力波形を生成する出力モードを、「高周波モードM3」と称する。また、第2電極320同士が対をなして筋電気刺激作用を有する高周波又は低周波の出力波形を生成する出力モードを、「筋電気刺激モードM4」と称する。各出力モードでの出力波形の例は後述する。また、第1電極310同士が対をなして、微弱電流(マイクロカレント)を付与する出力モードを、「マイクロカレントモードM5」と称する。また、第1電極310同士が対をなして、肌内からイオン(汚れ等に係るイオン)を導出する作用を有する出力波形を生成する出力モードを、「イオン導出モードM6」と称する。
また、本実施例では、上述したように、第1電極群31と第2電極群32とが径方向で近接して配置されるので、第1電極310と第2電極320とが対をなして、所望の出力波形を生成できる。この場合も、出力波形は、任意であり、例えば交流波形やパルス状の直流波形であってよい。交流波形の場合、出力波形の周波数帯は、任意であり、例えば、加温作用を有する高周波であってもよい。以下では、このように第1電極310と第2電極320とが対をなして出力波形を生成する出力モードを、「径方向モード」とも称する。
ここで、径方向モードを実現する仕様の場合、複数の第2電極320の数は、好ましくは、奇数であるが、偶数であってもよい。この場合、例えば上述したN1が偶数である場合に、第1電極群31と第2電極群32との間の周方向の関係が回転対称とならない関係になりやすい。かかる場合、第1電極群31と第2電極群32のうちから、多様な位置関係で第1電極310と第2電極320との間の対の組み合わせを形成でき、出力の多様化を実現することが可能となる。
ただし、変形例では、複数の第2電極320の数を偶数とし、第1電極群31と第2電極群32との間の周方向の関係が回転対称となるように、第1電極群31及び第2電極群32が配置されてよい。この場合、径方向モードを実現する仕様の場合であっても、径方向モードを含め、円周方向に沿って均一な作用を付与可能な各種モードを設定できる。
本実施例では、複数の第1電極310と複数の第2電極320とは、径方向で第3距離d3だけ離間する。第3距離d3は、好ましくは、上述した第1距離d1や第2距離d2とは異なる。この場合、第1電極群31と第2電極群32とにより実現可能な出力の多様化を図ることができる。具体的には、第3距離d3は、好ましくは、第1距離d1よりも小さい。例えば、第3距離d3<第1距離d1<第2距離d2の関係であってよい。この場合、多様な離間距離に起因した出力の多様化を図ることができる。なお、第3距離d3は、好ましくは、第1距離d1よりも、0.5mmから1.5mmの間の距離だけ小さい。
このように、本実施例によれば、複数の第1電極310が周方向に沿って分離して配置されるので、周方向で隣り合う第1電極310同士を対として、各種出力波形を生成できる。
ここで、周方向で隣り合う第1電極310同士を対として出力波形を生成する場合は、径方向で隣り合う電極同士を対として出力波形を生成する場合(例えば上述した径方向モード)に比べて、出力波形の実効領域を径方向に広げやすくなる。具体的には、複数の第1電極310の径方向の長さを比較的長くすることで、所定長さの区間SC1(直線状の離間領域390の径方向の長さ)を比較的長くすることができ、出力波形の実効領域を径方向に広げることができる。
この点、本実施例では、複数の第1電極310は、径方向の幅(内径と外径の差)が第4距離d4の円環を周方向間で分断した形態を有する。なお、径方向の幅が第4距離d4の円環は、中心Cを中心とし、内径が、直線状の離間領域390の幅の2倍程度に対応してよい。この場合、所定長さの区間SC1(直線状の離間領域390の径方向の長さ)は、第4距離d4が長いほど長くなる。従って、第4距離d4を比較的長い距離に設定することで、周方向で隣り合う第1電極310同士を対として生成する出力波形の実効領域を径方向に広げることができる。
他方、複数の第2電極320は、径方向の幅が第5距離d5の円環を周方向間で分断した形態を有する。この場合、第5距離d5は、第4距離d4よりも有意に小さくてよい。この場合、周方向で隣り合う第2電極320同士を対として生成する出力波形の実効領域は、径方向の長さが比較的小さくなるが、かかる実効領域によっても良好な筋電気刺激作用や浸透作用を確保できる。このようにして本実施例によれば、当接面3aにおける限られた電極配置領域において、第1電極群31と第2電極群32とを効率的に配置できる。
次に、図4から図6を参照して、肌処理装置1の制御系の構成について説明する。
図4は、一例による制御系100の概略的な構成図である。図5は、図4の制御装置110により実現される機能を説明するブロック図である。図6は、パラメータ記憶部116内に記憶される各種パラメータの設定値の説明図である。図4には、制御系100に加えて、電源150が併せて示されている。電源150は、例えば直流電源であってよい。なお、図4では、電源150がいくつか示されているが、共通であってよい。
図4に示す例では、制御系100は、制御装置110と、駆動回路部120、121、122と、出力波形発生部130、131、132と、切替回路部140、141とを含む。
制御装置110は、コンピュータを含み、例えばマイクロコンピュータにより形成されてよい。なお、制御装置110は、電源150からの電力に基づいて動作してよい。
制御装置110は、上述した浸潤モードM1や筋電気刺激モードM4等のような各種モードを選択的に形成し、各モードにおいて、対応する出力波形が生成されるように、駆動回路部120、121、122、出力波形発生部130、131、132、及び切替回路部140、141を介して複数の電極30を制御する。
本実施例では、一例として、制御装置110は、図5に示すように、ユーザ入力取得部111と、モード設定部112と、制御パラメータ設定部113と、制御信号生成部114と、切替制御部115と、パラメータ記憶部116とを含む。ユーザ入力取得部111から切替制御部115までの各部は、例えば制御装置110のCPU(Central Processing Unit)(図示せず)が、制御装置110の記憶装置(図示せず)の1つ以上のプログラムを実行することで実現できる。パラメータ記憶部116は、制御装置110の記憶装置(図示せず)により実現できる。
ユーザ入力取得部111は、上述したユーザインターフェイス20を介してユーザからの各種ユーザ入力を取得する。各種ユーザ入力は、電源のオン/オフ、モード選択入力、強度調整入力等を含んでよい。
モード設定部112は、ユーザ入力取得部111からユーザ入力に基づいて、ユーザの所望する動作モードを設定する。なお、変形例では、モード設定部112は、ユーザ入力に代えて又は加えて、他のパラメータに基づいて、動作モードを設定してもよい。動作モードは各種用意されてよく、その数や種類は任意である。本実施例では、一例として、動作モードは、複数用意され、動作モードA0と、動作モードA1とを含む。
動作モードA0は、上述した浸潤モードM1や筋電気刺激モードM4等のような各種モードのうちの、単独で実現される一のモードである。例えば、動作モードA0は筋電気刺激モードM4であってよい。この場合、動作モードA0が形成されている間、筋電気刺激モードM4だけが継続的に実現される。なお、動作モードA0は、浸潤モードM1や筋電気刺激モードM4等のそれぞれに応じて、複数設定されてもよい。
動作モードA1は、上述した浸潤モードM1や筋電気刺激モードM4等のような各種モードのうちの、2つ以上の組み合わせで実現される一のモードである。動作モードA1は、組み合わせ方が異なる態様で、複数用意されてよい。例えば、動作モードA1は、浸潤モードM1とイオン導入モードM2の2つの組み合わせであってもよいし、浸潤モードM1とイオン導入モードM2と筋電気刺激モードM4の3つの組み合わせであってもよい。なお、組み合わせ方は、任意であり、ユーザにより設定可能(カスタマイズ可能)であってもよい。動作モードA1のいくつかの具体例は、後述する。
動作モードA1において、各モードは、それぞれの持続時間にわたって、対応する出力波形を出力する態様で、間欠的かつ周期的に繰り返される。この場合、一の持続時間において出力される出力波形は、好ましくは、単一のパルスとは異なり、2回以上周期的に変化する連続波形を含む。例えば、出力波形が、パルス状の直流波形である場合、一の持続時間において出力される出力波形は、2つ以上のパルス(立ち上がり/下がりエッジから立ち下がり/立ち上がりエッジまでを1つのパルスとしたとき)を含む。また、出力波形が、正弦波状の交流波形である場合、一の持続時間において出力される出力波形は、2周期分以上の正弦波を含む。
また、動作モードA1において、一のモードから他の一のモードに遷移する際、当該一のモードに係る出力波形の終了タイミングから、当該他の一のモードに係る出力波形の開始タイミングまで、所定の休止時間が設定されてよい。所定の休止時間は、後述する切替回路部140、141における切替動作に必要な時間(例えば1ミリ秒から2ミリ秒)が確保される態様で、比較的短く設定されてよい。例えば、所定の休止時間は、各モードの持続時間の最短時間よりも短く、例えば5ミリ秒程度であってもよい。
制御パラメータ設定部113は、モード設定部112により設定される動作モードに応じて、対応する出力波形を実現するための各種制御パラメータの各値を設定する。各種制御パラメータは、交流波形か直流波形かを示す第1パラメータと、周波数を示す第2パラメータと、持続時間を示す第3パラメータと、出力波形を生成する電極の対を表す第4パラメータ等を含んでよい。持続時間とは、当該モードに係る出力波形の出力時間に対応し、対応する出力波形の開始時点から終了時点までの連続的な出力時間に対応する。なお、第3パラメータは、上述した動作モードA1だけで利用されてよく、動作モードA0では利用されなくてよい。なお、動作モードA0では、持続時間は、例えば電源がオフされるまでであってもよいし、他の要件(例えば図示しないサーミスタからの温度情報に基づく要件等)で決定されてもよい。
制御パラメータ設定部113は、パラメータ記憶部116内の各パラメータの設定値に基づいて、対応する出力波形を実現するための各種制御パラメータの各値を設定してよい。図6には、パラメータ記憶部116内に記憶される各種パラメータの設定値の一例が示されている。図6に示す例では、浸潤モードM1や筋電気刺激モードM4等の各モードに対して、各種パラメータの設定値が対応付けられている。なお、図6では、第1パラメータの値“1”は交流波形を表し、値“0”は直流波形を表す。また、第4パラメータの値PT1からPT4、PT20、PT21は、出力波形を生成する電極の対の変化パターンを表してもよい。なお、出力波形を生成する電極の対は、一対一の関係の対であってもよいし、一対多の関係の対であってもよい。
制御信号生成部114は、制御パラメータ設定部113により設定された各種パラメータの値に基づいて、PWM(Pulse Width Modulation)信号の形態の制御信号を生成する。制御信号生成部114は、生成した制御信号を、駆動回路部120、121、122のうちの、対応する駆動回路部に与える。
図4に示す例では、制御系100は、3系統の駆動回路部120、121、122を有し、駆動回路部120、121、122のうちの、駆動回路部120は、第2電極群32(複数の第2電極320)を介して各種出力波形を発生し、駆動回路部121、122は、第1電極群31(複数の第1電極310)を介して各種出力波形を発生する。駆動回路部121は、交流波形の出力波形(例えば高周波モードM3用の出力波形)を生成し、駆動回路部122は、直流波形の出力波形(例えばイオン導入モードM2用の出力波形)を発生する。
図4には、制御信号CT1、CT2の一部の波形が模式的に示されている。この場合、制御信号CT1、CT2は、それぞれ別々の制御ラインL1、L2を介して駆動回路部120、121に付与されてよい。制御信号CT1、CT2の周波数(デュティー比)は、第2パラメータの設定値に応じて決まってよい。また、図4には、制御信号CT3の一部の波形が模式的に示されている。この場合、制御信号CT3は、制御ラインL3を介して駆動回路部122に付与されてよい。制御信号CT3の周波数(デュティー比)は、第2パラメータの設定値に応じて決まってよい。
また、ある一のモードが実現される際、制御信号CT1、CT2(及びそれに伴い制御ラインL1、L2)が出力されるか、制御信号CT3が出力されるかは、当該一のモードに対応付けられている第1パラメータの設定値に応じて決まってよい。例えば、一のモードに関して、第1パラメータの設定値が“1”である場合、制御信号CT1、CT2の双方が出力され、第1パラメータの設定値が“0”である場合、制御信号CT3が出力されてよい。また、ある一のモードが実現される際、当該一のモードに対応付けられている制御信号CT1、CT2、CT3の持続時間は、第3パラメータの設定値に応じて決まってよい。
駆動回路部120、121、122は、後述する複数のスイッチング素子Trを駆動するドライバを含む。駆動回路部120、121、122は、それぞれ、制御信号生成部114からの制御信号CT1、CT2、CT3に応じて出力波形発生部130、131、132のスイッチング素子Trをオン/オフさせるための駆動信号を生成し、生成した駆動信号を、対応するスイッチング素子Trに与える。
出力波形発生部130、131、132は、それぞれ、直流電源である電源150に基づいて、出力波形を生成する。出力波形発生部130は、対のスイッチング素子Trと、トランス135とを含む。出力波形発生部131は、対のスイッチング素子Trと、トランス136とを含む。出力波形発生部132は、スイッチング素子Trと、トランス137とを含む。
駆動回路部120に係る系統に関して、対のスイッチング素子Trは、例えばトランジスタ等のスイッチング素子であり、一方は、トランス135の端子Taに接続され、他方は、トランス135の端子Tbに接続される。トランス135は、センタータップに係る端子Tcに電源150が接続される。本実施例では、トランス135は、高周波モードM3の周波数に適合された周波数仕様である。例えば、トランス135の誘起電圧Eを、E=√2・π・f・n・φmとした場合、周波数fは、高周波モードM3の周波数(図6の第2パラメータの設定値α3)と略等しい。なお、この場合、nは、巻数であり、φmは、磁束である。なお、トランス135は、周辺回路の設定乗数やフェライトコア(トランス135の内部部品)の材質や密着度を変えるなどの設定(調整)に基づいて、高周波モードM3の周波数に適合されてよい。
駆動回路部121に係る系統に関しても、対のスイッチング素子Trは、例えばトランジスタ等のスイッチング素子であり、一方は、トランス136の端子Taに接続され、他方は、トランス136の端子Tbに接続される。トランス136は、センタータップに係る端子Tcに電源150が接続される。本実施例では、トランス136は、高周波モードM3の周波数に適合された周波数仕様である。従って、この場合、出力波形発生部130、131は、同じ部品により構成されてもよい。これは、駆動回路部120、121も同様である。
駆動回路部122に係る系統に関して、スイッチング素子Trは、例えばトランジスタ等のスイッチング素子であり、トランス137の端子Tbに接続される。トランス137は、端子Taに電源150が接続される。本実施例では、トランス137は、イオン導入モードM2の周波数に適合された周波数仕様であってよい。
切替回路部140は、出力波形発生部130の出力端子(すなわちトランス135の出力端子)Td、Teの接続先を、複数の第2電極320内で切り替えることで、出力波形を生成する電極の対を複数の第2電極320内で制御する。この場合、切替回路部140は、第4パラメータの設定値に基づいて、出力波形を生成する電極の対を制御してよい。
切替回路部141は、出力波形発生部131の出力端子(すなわちトランス136の出力端子)Td、Teの接続先、及び、出力波形発生部132の出力端子(すなわちトランス137の出力端子)Td、Teの接続先を、複数の第1電極310内で切り替えることで、出力波形を生成する電極の対を複数の第1電極310内で制御する。この場合、切替回路部141は、第4パラメータの設定値に基づいて、出力波形を生成する電極の対を制御してよい。
図4に示した制御系100によれば、第1電極群31を介して出力波形を付与するための系列と、第2電極群32を介して出力波形を付与するための系列とが独立に構成されるので、第1電極群31を介した出力波形と第2電極群32を介した出力波形とを同時に生成(出力)することが可能である。従って、時間軸上で第1電極群31を介した出力波形と第2電極群32を介した出力波形とを多様な態様で組み合わせることも可能であり、肌処理装置1の出力のバリエーションを効率的に増加させることも可能である。
なお、図4に示した制御系100は、あくまで一例であり、生成対象の出力波形の種類や同時に第1電極群31及び第2電極群32を利用するか否か等の要請、コスト等に応じて、適宜、変更されてよい。例えば、同時に第1電極群31及び第2電極群32を利用しない構成では、駆動回路部122及び出力波形発生部132が省略されてよい。この場合、切替回路部140において、出力波形発生部130の出力端子(すなわちトランス135の出力端子)Td、Teの接続先が、複数の第2電極320内で、又は、複数の第1電極310内で、時分割により切り替えられてよい。あるいは、それに加えて又は代えて、切替回路部140において、出力波形発生部130の出力端子(すなわちトランス135の出力端子)Td、Teの接続先が、複数の第2電極320のうちの1つ以上と、複数の第1電極310のうちの1つ以上とが対をなす態様で、時分割により切り替えられてもよい。
次に、図7から図13を参照して、動作モードA1の例について説明する。
図7は、動作モードA1の一例の説明図であり、横軸を時間とした時系列で、組み合わせパターン(変化パターン)が示されている。具体的には、図7では、上側に、ヘッド部3の絵とともに、複数の電極30のうちの、対となる電極に対して、+マークを囲む丸と、-マークを囲む丸とが対応付けられている。この場合、+マークを囲む丸が対応付けられている電極と、-マークを囲む丸が対応付けられている電極とが、対をなす。また、図7では、下側に、ヘッド部3の絵に対応付けて、各モードの組み合わせパターン(変化パターン)が示されている。
図7に示す例では、動作モードA1は、高周波モードM3と、イオン導出モードM6との組み合わせモードである。この場合、高周波モードM3とイオン導出モードM6とは、この順序で、互いに対して重複しない態様で、周期的に繰り返される。
高周波モードM3では、複数の第1電極310のすべてが同時に利用されてよく、この場合、各対を介して、加温作用を有する出力波形がユーザの肌に印加される。なお、図7に示す例において、4つの第1電極310のうちの、交流波形の同位相の2つの第1電極310のそれぞれは、他の2つの第1電極310のそれぞれと対をなしてよい。
イオン導出モードM6では、複数の第1電極310のすべてが同時に利用されてよく、この場合、各対を介して、肌内からイオンを導出する作用を有する出力波形がユーザの肌に印加される。なお、図7に示す例において、4つの第1電極310のうちの、同一極性の2つの第1電極310のそれぞれは、他の2つの第1電極310のそれぞれと対をなしてよい。
このような図7に示す動作モードA1では、高周波モードM3とイオン導出モードM6とが交互に繰り返し実行されるので、高周波モードM3がユーザの肌を加温して汚れやクレンジング等を浮かせ、イオン導出モードM6により汚れやクレンジング等を効果的に吸着除去できる。このような図7に示す動作モードA1では、動作モードA1の一の周期における各モード(高周波モードM3とイオン導出モードM6のそれぞれ)の持続時間は、好ましくは、1秒よりも有意に長く設定される。
図8は、動作モードA1の他の一例の説明図であり、横軸を時間とした時系列で、組み合わせパターン(変化パターン)が示されている。なお、組み合わせパターン(変化パターン)の表記方法は、図7と同様である。
図8に示す例では、動作モードA1は、浸潤モードM1と、筋電気刺激モードM4と、高周波モードM3と、イオン導入モードM2との組み合わせモードである。この場合、第1の組み合わせモードM0と、第2の組み合わせモードM0と、第1の筋電気刺激モードM4と、第3の組み合わせモードM0と、第2の筋電気刺激モードM4と、イオン導入モードM2と、第3の筋電気刺激モードM4とは、この順序で、互いに対して重複しない態様で、周期的に繰り返される。
組み合わせモードM0は、浸潤モードM1と高周波モードM3との組み合わせモードである。すなわち、組み合わせモードM0は、肌内へと有効成分を浸透させる作用を有する第1サブモードとしての浸潤モードM1と、肌を加温する作用を有する第2サブモードとしての高周波モードM3とを含む。
この場合、2つのサブモード(第1サブモード及び第2サブモード)は、図4を参照して上述した制御系100を利用して、同時に実現できる。すなわち、第1サブモードは、図4に示した制御系100のうちの、第2電極群32に係る系統(駆動回路部120等)を利用して、第2サブモードは、図4に示した制御系100のうちの、第1電極群31に係る系統(駆動回路部121等)を利用して、それぞれ同時に互いに独立して実現できる。ただし、上述したように駆動回路部122及び出力波形発生部132が省略されるような変形例では、2つのサブモードは、時分割で実現されてもよい。
浸潤モードM1では、複数の第2電極320のすべてが同時に利用されてよく、この場合、各対を介して、肌内へと有効成分を浸透させる作用を有する出力波形がユーザの肌に印加される。なお、図8に示す例において、3つの第2電極320のうちの、交流波形の同位相の2つの第2電極320(例えば-マークを囲む丸が対応付けられている電極)は、他の第2電極320(+マークを囲む丸が対応付けられている電極)と対をなしてよい(すなわち、延べ2通りの対を形成してよい)。
高周波モードM3では、図7を参照して上述した態様と同様に、複数の第1電極310のすべてが同時に利用されてよい。
筋電気刺激モードM4では、複数の第2電極320のすべてが時分割式に利用されてよい。図8に示すように、第1の筋電気刺激モードM4では、3つの第2電極320のうちの、上側と右下の2つが対をなして出力波形を生成するが、次の第2の筋電気刺激モードM4では、異なる2つ(周方向で隣り合う2つ)が対をなし、次の第3の筋電気刺激モードM4では、更に異なる2つ(周方向で隣り合う2つ)が対をなしてよい。このようにして、筋電気刺激モードM4では、動作モードA1の一の周期において、出力波形を生成する対が周方向に1つずつずれる態様の3パターンで、変化されてもよい。あるいは、動作モードA1の一の周期において、出力波形を生成する対が周方向に2つずつずれる態様の3パターンで、変化されてもよい。ただし、変形例では、一の第1の筋電気刺激モードM4(第2の筋電気刺激モードM4及び第3の筋電気刺激モードM4についても同様)において、出力波形を生成する対が同様の態様で動的に変化されてもよい。すなわち、一の筋電気刺激モードM4の持続時間内で、出力波形を生成する対が同様の態様で動的に変化されてもよい。
イオン導入モードM2では、複数の第1電極310のすべてが同時に利用されてよい。この場合、各対を介して、肌内へイオンを導入する作用を有する出力波形がユーザの肌に印加される。なお、図8に示す例において、4つの第1電極310のうちの、同一極性の2つの第1電極310のそれぞれは、他の2つの第1電極310のそれぞれと対をなしてよい。
このような図8に示す動作モードA1では、各モード(組み合わせモードM0の浸潤モードM1、組み合わせモードM0の筋電気刺激モードM4、組み合わせモードM0の高周波モードM3、及びイオン導入モードM2のそれぞれ)の持続時間は、好ましくは、1秒未満に設定される。このような比較的短い持続時間で各モードを周期的に繰り返す場合、比較的長い持続時間(例えば1秒よりも有意に長い持続時間)で各モードを周期的に繰り返す場合に比べて、単位時間あたりの美容関連効果を高めることができる。
なお、図8に示す動作モードA1では、第1の組み合わせモードM0と第2の組み合わせモードM0とは、その間に休止時間を介することなく、連続して実現されてもよい(すなわち一体化されてもよい)。あるいは、第1の組み合わせモードM0は、動作モードA1の初回だけ又は動作モードA1の複数周期ごとに実行され、第2の組み合わせモードM0から第3の筋電気刺激モードM4までの各モードが動作モードA1の周期ごとに、実行されてもよい。
具体的には、図8に示す動作モードA1では、第2の組み合わせモードM0から第3の筋電気刺激モードM4までの各モードの持続時間は、好ましくは、1秒未満に設定される。このような比較的短い持続時間で各モードを周期的に繰り返す場合、比較的長い持続時間(例えば1秒よりも有意に長い持続時間)で各モードを周期的に繰り返す場合に比べて、単位時間あたりの美容関連効果を高めることができる。
具体的には、第2及び第3の組み合わせモードM0の持続時間は、好ましくは、20ミリ秒から70ミリ秒の間であり、より好ましくは30ミリ秒から60ミリ秒の間であり、最も好ましくは、40ミリ秒から50ミリ秒の間である。
イオン導入モードM2の持続時間は、好ましくは、20ミリ秒から70ミリ秒の間であり、より好ましくは30ミリ秒から60ミリ秒の間であり、最も好ましくは、40ミリ秒から50ミリ秒の間である。
第1から第3の筋電気刺激モードM4のそれぞれの持続時間は、好ましくは、10ミリ秒から40ミリ秒の間であり、より好ましくは15ミリ秒から35ミリ秒の間であり、最も好ましくは、20ミリ秒から30ミリ秒の間である。
他方、図8に示す動作モードA1では、第1の組み合わせモードM0の持続時間は、好ましくは、1秒よりも有意に長い時間に設定される。例えば、第1の組み合わせモードM0の持続時間は、好ましくは、5秒から25秒の間であり、より好ましくは10秒から20秒の間である。
図8Aは、動作モードA1の他の一例の説明図であり、横軸を時間とした時系列で、組み合わせパターン(変化パターン)が示されている。
図8Aに示す例では、動作モードA1は、浸潤モードM1と、筋電気刺激モードM4と、イオン導入モードM2との組み合わせモードである。この場合、第1の浸潤モードM1と、第1の筋電気刺激モードM4と、第2の浸潤モードM1と、第2の筋電気刺激モードM4と、イオン導入モードM2と、第3の筋電気刺激モードM4とは、この順序で、互いに対して重複しない態様で、周期的に繰り返される。
図8Aに示す例では、第1の浸潤モードM1及び第2の浸潤モードM1は、図8に示した例とは異なり、単独で実行される。この場合も、第1の浸潤モードM1及び第2の浸潤モードM1の持続時間は、好ましくは、20ミリ秒から70ミリ秒の間であり、より好ましくは30ミリ秒から60ミリ秒の間であり、最も好ましくは、40ミリ秒から50ミリ秒の間である。他のモードについては、図8に示した例と同様であってよい。
図9は、動作モードA1の他の一例の説明図であり、横軸を時間とした時系列で、組み合わせパターン(変化パターン)が示されている。なお、組み合わせパターン(変化パターン)の表記方法は、図7と同様である。
図9に示す動作モードA1は、図8に示した動作モードA1に対して、第3の筋電気刺激モードM4に後続して、比較的長い持続時間の第4の浸潤モードM1が実行される点が異なる。この場合、浸潤モードM1による作用(肌内へと有効成分を浸透させる作用)を効果的に高めることができる。
第4の浸潤モードM1は、第1から第3の浸潤モードM1と同様に、2つのサブモードからなってもよいが、好ましくは、図9に示すように、単独で実行される。第4の浸潤モードM1では、複数の第1電極310のすべてが同時に利用されてよく、この場合、各対を介して、肌内へと有効成分を浸透させる作用を有する出力波形がユーザの肌に印加される。なお、図9に示す例において、4つの第1電極310のうちの、交流波形の同位相の2つの第1電極310のそれぞれ(例えば+マークを囲む丸が対応付けられている電極)は、他の2つの第1電極310のそれぞれ(-マークを囲む丸が対応付けられている電極)と対をなしてよい(すなわち、延べ4通りの対を形成してよい)。このような動作モードA1は、例えば美白成分の浸透に好適である。
第4の浸潤モードM1の持続時間は、1秒よりも有意に長い時間に設定される。例えば、第3の筋電気刺激モードM4に後続する浸潤モードM1の持続時間は、好ましくは、5秒から25秒の間であり、より好ましくは10秒から20秒の間である。
なお、図9に示す例では、第4の浸潤モードM1は、複数の第1電極310により実現されているが、これに代えて又は加えて、組み合わせモードM0の浸潤モードM1と同様の態様で、複数の第2電極320により実現されてもよい。
図10は、動作モードA1の他の一例の説明図であり、横軸を時間とした時系列で、組み合わせパターン(変化パターン)が示されている。なお、組み合わせパターン(変化パターン)の表記方法は、図7と同様である。
図10に示す例では、動作モードA1は、浸潤モードM1と、イオン導入モードM2と、高周波モードM3と、筋電気刺激モードM4との組み合わせモードである。この場合、浸潤モードM1と、筋電気刺激モードM4と、組み合わせモードM10とは、この順序で、互いに対して重複しない態様で、周期的に繰り返される。
浸潤モードM1では、複数の第1電極310のすべてが同時に利用されてよく、この場合、各対を介して、肌内へと有効成分を浸透させる作用を有する出力波形がユーザの肌に印加される。なお、図10に示す例において、4つの第1電極310のうちの、交流波形の同位相の2つの第1電極310のそれぞれ(例えば+マークを囲む丸が対応付けられている電極)は、他の2つの第1電極310のそれぞれ(-マークを囲む丸が対応付けられている電極)と対をなしてよい(すなわち、延べ4通りの対を形成してよい)。
筋電気刺激モードM4は、図8に示した例と同様の態様で実行されてよい。
組み合わせモードM10は、イオン導入モードM2と高周波モードM3との組み合わせモードである。すなわち、組み合わせモードM10は、肌内へとイオンを導入する作用を有する第1サブモードとしてのイオン導入モードM2と、肌を加温する作用を有する第2サブモードとしての高周波モードM3とを含む。
この場合、2つのサブモード(第1サブモード及び第2サブモード)は、図4を参照して上述した制御系100を利用して、時分割式に実現されてもよい。この場合、一の持続時間内において、第1サブモード及び第2サブモードが交互に1回だけ実現されてもよいし、複数回実現されてもよい。
あるいは、2つのサブモード(第1サブモード及び第2サブモード)は、図4を参照して上述した制御系100とは異なる制御系(図示せず)を利用して、同時に実現されてもよい。この場合、複数の第1電極310の2対のうちの一方の対を介して第1サブモードが、他方の対を介して第2サブモードが同時に実現されてよい。この場合、一の持続時間内において、対を変化させずに、第1サブモード及び第2サブモードが実現されてもよいし、一の持続時間内において、対を変化させつつ、第1サブモード及び第2サブモードが実現されてもよい。あるいは、動作モードA1の周期ごとに対を変化させつつ、第1サブモード及び第2サブモードが実現されてもよい。対を変化させる場合、第1サブモードを実現する対の電極が、周方向に1つずつずれる態様又は周方向に3つずつずれる態様の4パターンで、変化されてもよいし、あるいは、第1サブモードを実現する対の電極が、周方向に2つずつずれる態様(すなわち第1サブモードを実現する対と、第2サブモードを実現する対とが交互に入れ替わる態様)の2パターンで、変化されてもよい。
このような図10に示す動作モードA1では、各モード(浸潤モードM1、筋電気刺激モードM4、及び組み合わせモードM10のそれぞれ)の持続時間は、好ましくは、1秒未満に設定される。このような比較的短い持続時間で各モードを周期的に繰り返す場合、比較的長い持続時間(例えば1秒よりも有意に長い持続時間)で各モードを周期的に繰り返す場合に比べて、単位時間あたりの美容関連効果を高めることができる。
なお、図10に示す例では、浸潤モードM1、筋電気刺激モードM4及び組み合わせモードM10が、この順序で周期的に繰り返されるが、浸潤モードM1、組み合わせモードM10及び筋電気刺激モードM4が、この順序で周期的に繰り返されてもよい。
図11は、動作モードA1の他の一例の説明図であり、横軸を時間とした時系列で、組み合わせパターン(変化パターン)が示されている。なお、組み合わせパターン(変化パターン)の表記方法は、図7と同様である。
図11に示す例では、動作モードA1は、浸潤モードM1と、イオン導入モードM2と、高周波モードM3と、筋電気刺激モードM4との組み合わせモードである。この場合、高周波モードM3、第1の浸潤モードM1と、第1の筋電気刺激モードM4と、第2の浸潤モードM1、第2の筋電気刺激モードM4、組み合わせモードM10、及び第3の筋電気刺激モードM4は、この順序で、互いに対して重複しない態様で、周期的に繰り返される。
浸潤モードM1及び筋電気刺激モードM4は、図10を参照して上述したとおりであってよい。また、組み合わせモードM10は、図10を参照して上述したとおりであってよい。
高周波モードM3では、複数の第1電極310のすべてが同時に利用されてよく、この場合、各対を介して、加温作用を有する出力波形がユーザの肌に印加される。なお、浸潤モードM1の場合と同様、図11に示す例において、4つの第1電極310のうちの、交流波形の同位相の2つの第1電極310のそれぞれは、他の2つの第1電極310のそれぞれと対をなしてよい。
このような図11に示す動作モードA1では、浸潤モードM1、組み合わせモードM10及び筋電気刺激モードM4のそれぞれの持続時間は、好ましくは、1秒未満に設定される。このような比較的短い持続時間で各モードを周期的に繰り返す場合、比較的長い持続時間(例えば1秒よりも有意に長い持続時間)で各モードを周期的に繰り返す場合に比べて、単位時間あたりの美容関連効果を高めることができる。
具体的には、浸潤モードM1の持続時間、組み合わせモードM10のイオン導入モードM2の持続時間、及び、筋電気刺激モードM4の持続時間は、図8に示した例と同様であってよい。
他方、図11に示す動作モードA1では、高周波モードM3の持続時間は、好ましくは、1秒よりも有意に長い時間に設定される。例えば、高周波モードM3の持続時間は、好ましくは、5秒から25秒の間であり、より好ましくは10秒から20秒の間である。
なお、変形例では、高周波モードM3は、動作モードA1の初回だけ又は動作モードA1の複数周期ごとに実行され、第1の浸潤モードM1から第3の筋電気刺激モードM4までの各モードが動作モードA1の周期ごとに、実行されてもよい。
図12は、動作モードA1の更なる他の一例の説明図であり、横軸を時間とした時系列で、組み合わせパターン(変化パターン)が示されている。なお、組み合わせパターン(変化パターン)の表記方法は、図7と同様である。
図12に示す動作モードA1は、図11に示した動作モードA1に対して、第3の筋電気刺激モードM4に後続して、比較的長い持続時間の浸潤モードM1が実行される点が異なる。この場合、浸潤モードM1による作用(肌内へと有効成分を浸透させる作用)を効果的に高めることができる。
この場合、第3の筋電気刺激モードM4に後続する浸潤モードM1の持続時間は、1秒よりも有意に長い時間に設定される。例えば、第3の筋電気刺激モードM4に後続する浸潤モードM1の持続時間は、好ましくは、5秒から25秒の間であり、より好ましくは10秒から20秒の間である。
図13は、動作モードA1の更なる他の一例の説明図であり、横軸を時間とした時系列で、組み合わせパターン(変化パターン)が示されている。なお、パターン(変化パターン)の表記方法は、図7と同様である。
図13に示す動作モードA1は、高周波モードM3と、マイクロカレントモードM5と、筋電気刺激モードM4との組み合わせモードである。この場合、高周波モードM3、マイクロカレントモードM5及び筋電気刺激モードM4は、この順序で、互いに対して重複しない態様で、周期的に繰り返される。
マイクロカレントモードM5では、複数の第1電極310のすべてが同時に利用されてよい。図13に示す動作モードA1は、例えば、目元のたるみや乾燥小じわの改善の効果を期待できる。また、筋電気刺激モードM4を組み合わせることで体感のあるモードを実現できる。マイクロカレントモードM5の持続時間は、1秒よりも有意に短くてよく、例えば0.4秒程度であってよい。また、図13に示す動作モードA1における高周波モードM3の持続時間は、1秒よりも有意に短くてよく、例えば0.6秒程度であってよい。また、図13に示す動作モードA1における筋電気刺激モードM4の持続時間は、1秒よりも有意に短くてよく、例えば0.2秒程度であってよい。なお、図13に示す動作モードA1における筋電気刺激モードM4では、図13に模式的に示すように、複数の第1電極310のすべてが同時に利用されてもよいし、図8を参照して上述したように、複数の第1電極310の2つが対となり、当該対が変化する態様で実現されてもよい。
図13に示す例では、マイクロカレントモードM5は、単独で実行されるが、2つのサブモードの組み合わせで実行されてもよい。すなわち、マイクロカレントモードM5は、微弱電流を付与する第1サブモードと、筋電気刺激作用を有する第2サブモードとを含む態様で実現されてもよい。この場合、2つのサブモード(第1サブモード及び第2サブモード)は、図4を参照して上述した制御系100を利用して、時分割式に実現されてもよい。この場合、一の持続時間内において、第1サブモード及び第2サブモードが交互に1回だけ実現されてもよいし、複数回実現されてもよい。あるいは、2つのサブモード(第1サブモード及び第2サブモード)は、図4を参照して上述した制御系100を利用して、同時に実現されてもよい。
図14は、動作モードA0の一例の説明図であり、横軸を時間とした時系列で、組み合わせパターン(変化パターン)が示されている。なお、パターン(変化パターン)の表記方法は、図7と同様である。
動作モードA0は、筋電気刺激モードM4だけが実現される。この場合、筋電気刺激モードM4は、複数の第2電極320のすべてが時分割式に利用されてよい。図14に示す例では、筋電気刺激モードM4は、3つの第2電極320のうちの、出力波形を生成する対が周方向に時計まわりに(正面視で時計まわりに)1つずつずれる態様の3パターンで、変化される。なお、3パターンの順序等は任意に変更されてよい。
動作モードA0では、このような3パターンが動作モードA0の周期ごとに実現される態様で、周期的に繰り返される。この場合、各パターンの持続時間TEMSは、動作モードA0の周期ごとに同じであってもよいが、好ましくは、変化周期ごとに規則的に変化される。持続時間TEMSは、例えば、1000ミリ秒、500ミリ秒、250ミリ秒、50ミリ秒、25ミリ秒といった具合に、変化されてもよい。この場合の変化周期は、一定であってもよく、例えば10秒程度であってもよい。この場合、複数種類の筋電気刺激を周期的に付与できるので、効果的なリフトアップを期待できる。
次に、図15から図19を参照して、上述した浸潤モードM1のような各種モードに係る出力波形の好ましい例について説明する。
図15は、浸潤モードM1の出力波形の好ましい例を示す図である。図15では、横軸に時間を取り、縦軸に電圧値を取ったときの、浸潤モードM1の出力波形(時系列波形)が示されている。なお、図15において、ΔT1は、出力波形の一周期を表す。
本実施例では、浸潤モードM1の出力波形は、交流波形であり、かつ、半周期(ΔT/2)の間に複数のピーク電圧値を有する。この場合、複数のピーク電圧値は、第1ピーク電圧値Vp1と、1つ以上の第2ピーク電圧値Vp2とを含む。
第1ピーク電圧値Vp1は、半周期の最初に現れるピーク電圧値であり、第2ピーク電圧値Vp2は、第1ピーク電圧値Vp1よりも後に現れ、かつ、第1ピーク電圧値Vp1よりも大きさが小さい。第2ピーク電圧値Vp2は、図15に示すように、徐々に小さくなる態様で複数発生してもよい。第2ピーク電圧値Vp2は、好ましくは、第1ピーク電圧値Vp1の大きさの半分よりも小さい。
浸潤モードM1の出力波形の周波数は、高周波モードM3の出力波形の周波数よりも有意に低く、好ましくは、10kHzから500kHzの間である。
このような浸潤モードM1の出力波形による効果については、図20以降を参照して後述する。
ところで、このような浸潤モードM1の出力波形は、後出の図19に示す高周波モードM3の出力波形とは、有意に波形(周波数以外の波形特徴)が異なるが、高周波モードM3の出力波形と同じハードウェア資源を利用して生成できる。具体的には、浸潤モードM1の出力波形と、高周波モードM3の出力波形とは、ともに、図4に示した制御系100の出力波形発生部130、131を介して生成可能である。この場合、浸潤モードM1の出力波形を生成する場合と、高周波モードM3の出力波形を生成する場合とで、制御信号生成部114からの制御信号CT1、CT2の周波数が異なるだけである。すなわち、浸潤モードM1の出力波形を生成する場合は、制御信号生成部114からの制御信号CT1、CT2の周波数は、浸潤モードM1の出力波形の周波数に対応するのに対して、高周波モードM3の出力波形を生成する場合は、制御信号生成部114からの制御信号CT1、CT2の周波数は、高周波モードM3の出力波形の周波数に対応するだけの相違である。
上述したように、本実施例では、トランス136(トランス135も同様)は、高周波モードM3の周波数に適合された周波数仕様であるので、高周波モードM3の周波数に対応する制御信号CT1、CT2に対しては、図19に示したような所望の周波数(高周波モードM3の周波数)の正弦波状の出力波形を生成できる。一方、トランス135(トランス136も同様)は、高周波モードM3の周波数よりも有意に低い浸潤モードM1の出力波形の周波数に対応する制御信号CT1、CT2に対しては、図19に示したような正弦波状の出力波形(浸潤モードM1の出力波形に係る周波数に対応する正弦波状の出力波形)を、生成できない。他方、トランス135は、高周波モードM3の周波数よりも有意に低い浸潤モードM1の出力波形の周波数に対応する制御信号CT1、CT2に対しては、図15に示すような浸潤モードM1の出力波形を生成できる。
このようにして本実施例によれば、図15に示すような浸潤モードM1の出力波形を生成するための特別なハードウェア資源を必要とすることなく、図15に示すような浸潤モードM1の出力波形を生成できる。すなわち、本実施例によれば、高周波モードM3の出力波形を生成するためのハードウェア資源を利用して、図15に示すような浸潤モードM1の出力波形を生成できる。この結果、制御系100の部品バリエーションを最小限に留めつつ、図15に示すような浸潤モードM1の出力波形を含む多様な出力波形(上述又は後述するような各種作用を有する出力波形)を生成できる。
なお、変形例では、第2電極群32に代えて又は加えて第1電極群31を介して、図15に示すような浸潤モードM1の出力波形を生成してもよい。また、第1電極群31に代えて又は加えて第2電極群32を介して、図19に示すような高周波モードM3の出力波形を生成してもよい。この場合、共通の駆動回路部及び出力波形発生部(例えば、第2電極群32の場合、図4の駆動回路部120及び出力波形発生部130)を利用して、制御信号CT1、CT2の周波数を変えるだけで、図15に示すような浸潤モードM1の出力波形と、図19に示すような高周波モードM3の出力波形とを選択的に生成できる。これにより、制御系100の回路規模最小限に留めつつ、多様な出力波形(上述又は後述するような各種作用を有する出力波形)を多様な電極を介して付与できる。
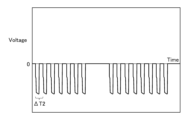
図16は、イオン導入モードM2の出力波形の好ましい例を示す図である。図16では、横軸に時間を取り、縦軸に電圧値を取ったときの、イオン導入モードM2の出力波形(時系列波形)が示されている。なお、図16において、ΔT2は、出力波形の一周期を表す。
イオン導入モードM2では、一の持続時間内に、少なくとも2回以上周期的に変化する連続波形を発生する。本実施例では、イオン導入モードM2の出力波形は、パルス状の直流波形である。なお、図16に示す波形に代えて、図17に示すような極性が反転した波形が利用されてもよい。
イオン導入モードM2の出力波形の周波数は、一の持続時間内に少なくとも2つ以上のパルス状の直流波形が発生するように定められ、好ましくは、1.5kHzから10kHzの間である。
イオン導入モードM2の出力波形は、振幅が同じ複数のパルス状の直流波形からなってもよいが、好ましくは、振幅(電圧値の大きさ)が他よりも有意に大きい1つ以上の特定のパルスを含んでよい。例えば、図18には、一の持続時間内に、特定のパルスPL2が1つだけ含まれるイオン導入モードM2の出力波形の例が示されている。特定のパルスは、パルス刺激により皮膚に一過性の孔を発生させること(エレクトロポレーション)で、イオン導入モードM2の効果を高める機能を有する。特定のパルスは、イオン導入モードM2の出力波形のうちの、特定のパルス以外のパルス(以下、区別のため、「メソポレーション用パルス」と称する)に対して、振幅のみならず、周波数も異なってもよい。例えば、メソポレーション用パルスは、ピーク電圧値が10V未満であり、かつ、周波数が1.5kHzから10kHzの間であるのに対して、特定のパルスは、ピーク電圧値が10V以上であり、かつ、周波数が2~10Hz程度の低周波であってよい。
ところで、高電圧を印加してイオンで有効成分を深層部へと押し込む作用(メソポレーション)を有するメソポレーション用パルスの機能を高めるためには、パルス刺激により皮膚に一過性の孔を発生させる機能を有する特定のパルスの印加直後にメソポレーション用パルスを印加することが有用となりうる。これは、一過性の孔がすぐにふさがってしまう傾向があるためである。
この点、図18に示すような出力波形によれば、特定のパルスの印加直後にメソポレーション用パルスが発生するので、イオン導入モードM2の効果を効果的に高めることができる。
図19は、高周波モードM3の出力波形の好ましい例を示す図である。図19では、横軸に時間を取り、縦軸に電圧値を取ったときの、高周波モードM3の出力波形(時系列波形)が示されている。なお、図19において、ΔT3は、出力波形の一周期を表す。
高周波モードM3の出力波形は、高周波の交流波形であり、上述したように浸潤モードM1の出力波形の周波数よりも有意に高い周波数を有する。高周波モードM3の出力波形の周波数は、例えば、900kHz以上であってよい。
次に、図20以降を参照して、図15に示すような浸潤モードM1の出力波形による効果について説明する。
図20は、各種出力波形による有効成分の浸透効果を比較する図である。図20の左側には、縦軸に、角層2-5層目に係る角層内吸収量を取り、横軸に、各種試験条件C1からC5が対応付けられ、試験条件C1からC5のそれぞれにおける同角層内吸収量が示されている。また、図20の右側には、縦軸に、角層6-10層目に係る角層内吸収量を取り、横軸に、各種試験条件C1からC5が対応付けられ、試験条件C1からC5のそれぞれにおける同角層内吸収量が示されている。試験条件C1は、肌処理装置1から出力波形を発生させない条件(以下、「出力不使用条件」とも称する)に対応し、試験条件C2からC5は、肌処理装置1を使用する条件であり、試験条件C2は、高周波モードM3の出力波形だけが付与される条件に対応し、試験条件C3は、イオン導入モードM2の出力波形(図16に示す正側の出力波形)だけが付与される条件に対応し、試験条件C4は、イオン導入モードM2の出力波形(図17に示す負側の出力波形)だけが付与される条件に対応する。また、試験条件C5は、図15に示すような浸潤モードM1の出力波形だけが付与される条件に対応する。
本試験は、以下のとおりの手順で実行された。
1)まず、皮膚恒常性の確認として、前腕部を洗浄後、15分、馴化し、適用部位(5箇所)の水分蒸発量を計測した上で、数値の大きな変動や傷がないことを確認した。
2)次いで、以下のとおり、美顔器処理から定量計測を行った。
2-1:前腕部に試料を滴下する。
2-2:2-1の処理後、試料の上から1.5分間、毎秒1回転のスピードで円を描くような動作で使用する。なお、出力不使用条件では、電源をオフした状態の肌処理装置1(すなわち出力波形が一切生成されていない状態の肌処理装置1)を用いて同様の動作を実現する。
2-3:2-2の処理後、いずれもコットンで残存試料を拭き取り、50%のエタノール溶液を浸したコットンで皮膚表面を拭き取り、洗浄を行う。
2-4:2-3の処理後、適用部位の角層を粘着テープ(商品名「D-Squame(登録商標」で商業的に入手可能な角質チェッカー)にて剥離し、角層2-5層目及び角層6-10層目のそれぞれに含有するVCPMg(リン酸L-アスコルビルマグネシウム)量を定量する。
なお、本試験では、肌処理装置1の電気的な影響を考慮し、試験条件C1から実行された。
1)まず、皮膚恒常性の確認として、前腕部を洗浄後、15分、馴化し、適用部位(5箇所)の水分蒸発量を計測した上で、数値の大きな変動や傷がないことを確認した。
2)次いで、以下のとおり、美顔器処理から定量計測を行った。
2-1:前腕部に試料を滴下する。
2-2:2-1の処理後、試料の上から1.5分間、毎秒1回転のスピードで円を描くような動作で使用する。なお、出力不使用条件では、電源をオフした状態の肌処理装置1(すなわち出力波形が一切生成されていない状態の肌処理装置1)を用いて同様の動作を実現する。
2-3:2-2の処理後、いずれもコットンで残存試料を拭き取り、50%のエタノール溶液を浸したコットンで皮膚表面を拭き取り、洗浄を行う。
2-4:2-3の処理後、適用部位の角層を粘着テープ(商品名「D-Squame(登録商標」で商業的に入手可能な角質チェッカー)にて剥離し、角層2-5層目及び角層6-10層目のそれぞれに含有するVCPMg(リン酸L-アスコルビルマグネシウム)量を定量する。
なお、本試験では、肌処理装置1の電気的な影響を考慮し、試験条件C1から実行された。
図20に示すように、図15に示すような浸潤モードM1の出力波形によれば、他のモードの出力波形よりも、角層2-5層目及び角層6-10層目のいずれにおいても、顕著に高い浸透効果を期待できることが分かった。
ここで、イオン導入又はイオン導出には、向いている物質とそうでない物質があるが、図15に示すような浸潤モードM1の出力波形は、下記の表に示すようなあらゆる特性の成分において、高い浸透効果を期待できることが分かった。

試験条件C10からC12は、それぞれ、浸潤モードM1の出力波形の周波数が50kHz、70kHz、156kHzである条件に対応し、試験条件C1は、上述した出力不使用条件(肌処理装置1から出力波形を発生させない条件)である。なお、試験手順は、図20を参照して上述したとおりである。
図21に示すように、図15に示すような浸潤モードM1の出力波形によれば、試験条件C1に係る結果と比べて明らかなように、いずれの周波数においても有効な結果が得られた。なお、浸潤モードM1の出力波形の周波数に関して、周波数が低いほうが僅かに角層内吸収量が多くなる傾向も確認できる。
図22は、図15に示すような浸潤モードM1の出力波形の電流値の違いに応じた効果の相違の説明図である。図22では、縦軸に、角層内吸収量を取り、横軸に、各種試験条件C20、C21及びC1が対応付けられ、試験条件C20、C21及びC1のそれぞれにおける角層内吸収量が、角層2-5層目(符号2301参照)と、角層6-10層目(符号2302参照)と、それらの合計(角層2-10層目)(符号2303参照)とに分けて、示されている。
試験条件C20、C21は、それぞれ、浸潤モードM1の出力波形の周波数が70kHzである条件に対応し、試験条件C20は、試験条件C21よりも電流値が2倍である点を除き、試験条件C21と同じ条件である。なお、試験条件C1は、上述した出力不使用条件である。
図22に示すように、電流値が高いほうがすべての層において吸収量が高くなる傾向が確認できる。具体的には、電流値が2倍である場合(試験条件C21に対して試験条件C20)、吸収量が1.5倍になっている。このことから、同じ周波数であれば、電流値が高いほうが吸収量が多くなることが分かる。
図23は、図15に示すような浸潤モードM1の出力波形の使用時間の違いに応じた効果の相違の説明図である。図23では、縦軸に、角層内吸収量を取り、横軸に、各種試験条件C30、C31及びC1が対応付けられ、試験条件C30、C31及びC1のそれぞれにおける角層内吸収量が、角層2-5層目(符号2301参照)と、角層6-10層目(符号2302参照)と、それらの合計(角層2-10層目)(符号2303参照)とに分けて、示されている。
試験条件C30、C31は、それぞれ、浸潤モードM1の出力波形の周波数が70kHzである条件に対応し、試験条件C30は、使用時間が90秒であり、試験条件C31は、使用時間が15秒である。なお、試験条件C1は、上述した出力不使用条件である。
図23に示すように、使用時間が長いほうがすべての層において吸収量が高くなる傾向が確認できる。具体的には、使用時間が6倍である場合(試験条件C31の“15秒”に対して6倍の試験条件C30の“90秒”)、吸収量は、角層2-10層目で3.6倍になっている。このことから、同じ周波数であれば、使用時間が長いほうが吸収量が多くなることが分かる。従って、例えば、動作モードA1に浸潤モードM1を含め、かつ、動作モードA1の一の周期に占める浸潤モードM1の時間の比率を高くすることで、単位時間あたりの吸収量を効率的に高めることを期待できる。
以上、各実施例について詳述したが、特定の実施例に限定されるものではなく、特許請求の範囲に記載された範囲内において、種々の変形及び変更が可能である。また、前述した実施例の構成要素を全部又は複数を組み合わせることも可能である。
例えば、図15に示すような浸潤モードM1の出力波形は、皮膚外用剤に含まれる有用物質の浸透を促進するのに好適であり、皮膚外用剤であれば医薬品、医薬部外品、化粧品など物質担体の使用目的は任意である。例えば、化粧品、医薬部外品に留まらず、肝臓で分解され効果効能が発揮しきれなかった医薬品の経皮吸収の促進にも効果がある。さらに経皮吸収させる外用剤の使用目的は任意であり、鎮痛剤、消炎剤、美白剤、湿潤剤、抗しわ剤、抗炎症剤、抗菌剤、抗ウイルス薬をはじめとして外用剤の経皮吸収目的を問わない。
1 肌処理装置
2 把持部
3 ヘッド部
3a 当接面
20 ユーザインターフェイス
30 電極
31 第1電極群
31a 第1円周
32 第2電極群
32a 第2円周
310 第1電極
320 第2電極
390 離間領域
100 制御系
110 制御装置
111 ユーザ入力取得部
112 モード設定部
113 制御パラメータ設定部
114 PWM信号生成部
115 切替制御部
116 パラメータ記憶部
120 駆動回路部
121 駆動回路部
122 駆動回路部
130 出力波形発生部
131 出力波形発生部
132 出力波形発生部
135 トランス
136 トランス
137 トランス
140 切替回路部
141 切替回路部
150 電源
2 把持部
3 ヘッド部
3a 当接面
20 ユーザインターフェイス
30 電極
31 第1電極群
31a 第1円周
32 第2電極群
32a 第2円周
310 第1電極
320 第2電極
390 離間領域
100 制御系
110 制御装置
111 ユーザ入力取得部
112 モード設定部
113 制御パラメータ設定部
114 PWM信号生成部
115 切替制御部
116 パラメータ記憶部
120 駆動回路部
121 駆動回路部
122 駆動回路部
130 出力波形発生部
131 出力波形発生部
132 出力波形発生部
135 トランス
136 トランス
137 トランス
140 切替回路部
141 切替回路部
150 電源
Claims (8)
- ユーザの肌に当接可能な複数の電極群を有する肌処理装置であって、
前記複数の電極群は、第1電極群と、第2電極群と、を含み、
前記第1電極群は、第1円周に沿って第1所定角度ごとに配置される複数の第1電極を含み、
前記第2電極群は、前記第1円周と同心かつ前記第1円周より径が大きい第2円周に沿って第2所定角度ごとに配置される複数の第2電極を含む、肌処理装置。 - 前記複数の第1電極のうちの、前記第1円周を基準とした周方向で隣り合う任意の2つは、互いに対する離間距離が第1距離であり、
前記複数の第2電極のうちの、前記第2円周を基準とした周方向で隣り合う任意の2つは、互いに対する離間距離が第2距離であり、
前記第1距離は、前記第2距離よりも小さい、請求項1に記載の肌処理装置。 - 前記複数の第1電極と前記複数の第2電極とは、前記第1円周を基準とした径方向で第3距離だけ離間し、
前記第3距離は、前記第1距離よりも小さい、請求項2に記載の肌処理装置。 - 前記複数の第1電極のうちの、前記任意の2つの離間距離は、前記第1円周を基準とした径方向に沿った所定長さの区間にわたって前記第1距離を保つ、請求項2又は3に記載の肌処理装置。
- 前記複数の第1電極は、前記第1円周の中心を通って交差する複数の直線状の領域により分離され、前記直線状の領域の幅は前記第1距離である、請求項2から4のうちのいずれか1項に記載の肌処理装置。
- 前記複数の第1電極は、前記第1円周を基準とした径方向の幅が第4距離の円環を周方向間で分断した形態を有し、
前記複数の第2電極は、前記第2円周を基準とした径方向の幅が第5距離の円環を周方向間で分断した形態を有し、
前記第4距離は、前記第5距離も大きい、請求項1から5のうちのいずれか1項に記載の肌処理装置。 - 前記複数の第1電極の個数は、偶数であり、
前記複数の第2電極の個数は、奇数である、請求項1から6のうちのいずれか1項に記載の肌処理装置。 - 互いに異なる複数種類の出力モードで前記複数の電極群を介した出力を実現する制御装置を更に備え、
前記複数種類の出力モードは、前記第1電極群を介して加熱用の高周波波形を出力するモードと、前記第2電極群を介して筋電気刺激用の波形を出力するモードとを含む。請求項1から7のうちのいずれか1項に記載の肌処理装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021192736A JP2023079321A (ja) | 2021-11-29 | 2021-11-29 | 肌処理装置 |
| PCT/JP2022/043782 WO2023095908A1 (ja) | 2021-11-29 | 2022-11-28 | 肌処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021192736A JP2023079321A (ja) | 2021-11-29 | 2021-11-29 | 肌処理装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2023079321A true JP2023079321A (ja) | 2023-06-08 |
Family
ID=86539684
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021192736A Pending JP2023079321A (ja) | 2021-11-29 | 2021-11-29 | 肌処理装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2023079321A (ja) |
| WO (1) | WO2023095908A1 (ja) |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102628092B1 (ko) * | 2016-11-07 | 2024-01-23 | 엘지전자 주식회사 | 피부 케어 기기 |
| JP2021023430A (ja) * | 2019-07-31 | 2021-02-22 | ヤーマン株式会社 | 美容機器 |
-
2021
- 2021-11-29 JP JP2021192736A patent/JP2023079321A/ja active Pending
-
2022
- 2022-11-28 WO PCT/JP2022/043782 patent/WO2023095908A1/ja unknown
Also Published As
| Publication number | Publication date |
|---|---|
| WO2023095908A1 (ja) | 2023-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101209102B1 (ko) | 전기자극 기능을 가지는 미세전류 기기 | |
| JP7372051B2 (ja) | 美容器、及びその制御方法 | |
| JP2001198227A (ja) | 美容用交流波形および美容器具 | |
| WO2021215149A1 (ja) | 美容器 | |
| JP2021100659A (ja) | 電気刺激装置 | |
| KR100955743B1 (ko) | 저주파 치료기 | |
| WO2023095908A1 (ja) | 肌処理装置 | |
| WO2023095922A1 (ja) | 肌処理装置及びプログラム | |
| JP2016202660A (ja) | 美顔器及び美顔システム | |
| JP2015163145A (ja) | 生体電気刺激装置 | |
| JP2023079985A (ja) | 肌処理装置及びプログラム | |
| WO2024045716A1 (zh) | 一种rf美颜仪及其电流控制方法 | |
| CN109876296B (zh) | 一种电子针灸治疗仪 | |
| JP4360734B2 (ja) | 電子美肌器 | |
| CN118119431A (zh) | 肌肤处理装置 | |
| TW200831150A (en) | Low-frequency electric therapy apparatus | |
| KR20130037903A (ko) | 양극형 프로브 헤드가 구비된 이온 도입기 | |
| CN118119430A (zh) | 肌肤处理装置以及程序 | |
| JP2004129866A (ja) | 電子トリートメント装置 | |
| JP3225952U (ja) | 複合美容装置 | |
| JP2021133160A (ja) | 高周波美容器 | |
| JP2018102756A (ja) | 美容の施術支援装置 | |
| WO2023095688A1 (ja) | 肌処理装置 | |
| JP2019093093A (ja) | 波形発生装置 | |
| WO2023234116A1 (ja) | 肌処理装置、肌処理装置を作動させる作動方法、肌処理方法、プログラム |