JP2022191143A - Image processing device and image processing method - Google Patents
Image processing device and image processing method Download PDFInfo
- Publication number
- JP2022191143A JP2022191143A JP2022036409A JP2022036409A JP2022191143A JP 2022191143 A JP2022191143 A JP 2022191143A JP 2022036409 A JP2022036409 A JP 2022036409A JP 2022036409 A JP2022036409 A JP 2022036409A JP 2022191143 A JP2022191143 A JP 2022191143A
- Authority
- JP
- Japan
- Prior art keywords
- image
- image data
- unit
- image processing
- circular
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Abstract
Description
本発明は、画像処理装置および画像処理方法に関する。 The present invention relates to an image processing device and an image processing method.
視差画像対を頭部装着型ディスプレイ(HMD)などに表示して立体視を提供することが知られている。また、特許文献1には、1つのレンズマウントと2つの結像光学系を有するレンズ(以下、2眼レンズという)を用いて視差画像対を1台で撮影可能な撮像装置が記載されている。 It is known to display parallax image pairs on a head mounted display (HMD) or the like to provide stereoscopic viewing. Further, Patent Literature 1 describes an image pickup apparatus capable of photographing a pair of parallax images by using a lens having one lens mount and two imaging optical systems (hereinafter referred to as a twin lens). .
光軸が水平方向に離間した2つの結像光学系(右眼光学系および左眼光学系)を有する2眼レンズを用いて1つの撮像素子に1対の像を形成すると、結像光学系と像の位置関係が左右で入れ替わる。すなわち、右目光学系が形成した像(右像)が左側に、左眼光学系が形成した像(左像)が右側に位置した撮像画像が得られる。 When a pair of images are formed on one imaging element using a twin lens having two imaging optical systems (a right-eye optical system and a left-eye optical system) with optical axes separated in the horizontal direction, the imaging optical system and the positional relationship of the image is switched between left and right. That is, a captured image is obtained in which the image formed by the right-eye optical system (right image) is positioned on the left side and the image formed by the left-eye optical system (left image) is positioned on the right side.
右像と左像を正しく用いるには、撮像画像内の右像と左像の関係を正しく把握する必要がある。そのためには、右像と左像の位置関係が逆転した像を形成する2眼レンズユニットが装着されていることを撮像装置が認識できなければならない。 In order to correctly use the right image and the left image, it is necessary to correctly grasp the relationship between the right image and the left image in the captured image. For this purpose, the imaging apparatus must be able to recognize that a twin-lens unit that forms an image in which the positional relationship between the right image and the left image is reversed is attached.
例えば、撮像装置は、レンズユニットとの通信を通じて取得したレンズユニットの情報(レンズ情報)に基づいて、装着されたレンズユニットが右像と左像の位置関係が逆転した像を形成する2眼レンズユニットであることを認識できるかもしれない。しかし、撮像装置に装着可能なすべてのレンズユニットからレンズ情報が取得できるとは限らない。また、装着されたレンズユニットが右像と左像の位置関係が逆転した像を形成する2眼レンズユニットか否かを判定可能な情報がレンズ情報に含まれていない可能性もある。 For example, the imaging device has a twin-lens lens in which the attached lens unit forms an image in which the positional relationship between the right image and the left image is reversed, based on information about the lens unit (lens information) acquired through communication with the lens unit. You may be able to recognize that it is a unit. However, it is not always possible to acquire lens information from all lens units attachable to the imaging apparatus. In addition, there is a possibility that the lens information does not include information that can determine whether or not the mounted lens unit is a twin lens unit that forms an image in which the positional relationship between the right image and the left image is reversed.
本発明はこのような従来技術の課題に鑑みてなされたものである。本発明の目的の1つは、撮像装置が2眼レンズユニットを認識できなかった場合であっても、撮像装置が記録した画像の種別を認識し、適切に処理することが可能な画像処理装置および画像処理方法を提供することにある。 The present invention has been made in view of such problems of the prior art. One object of the present invention is to provide an image processing apparatus capable of recognizing the type of image recorded by the imaging device and appropriately processing the image even when the imaging device cannot recognize the twin-lens unit. and to provide an image processing method.
上述の目的は、画像データを取得する取得手段と、画像データが表す画像が、2つの円形領域を含んでいるか否かを判定する判定手段と、判定手段により、画像が2つの円形領域を含んでいると判定された場合、画像に対して所定の処理を実行する処理手段と、を有することを特徴とする画像処理装置によって達成される。 The above objects are provided by obtaining means for obtaining image data, determining means for determining whether an image represented by the image data includes two circular areas, and determining whether the image includes two circular areas by the determining means. and a processing means for executing a predetermined process on the image when it is determined that the image is in the correct state.
撮像装置が2眼レンズユニットを認識できなかった場合であっても、撮像装置が記録した画像の種別を認識し、適切に処理することが可能な画像処理装置および画像処理方法を提供することができる。 It is possible to provide an image processing apparatus and an image processing method capable of recognizing the type of an image recorded by the imaging apparatus and appropriately processing the image even when the imaging apparatus cannot recognize the twin-lens unit. can.
以下、添付図面を参照して本発明をその例示的な実施形態に基づいて詳細に説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定しない。また、実施形態には複数の特徴が記載されているが、その全てが発明に必須のものとは限らず、また、複数の特徴は任意に組み合わせられてもよい。さらに、添付図面においては、同一若しくは同様の構成に同一の参照番号を付し、重複した説明は省略する。 The invention will now be described in detail on the basis of its exemplary embodiments with reference to the accompanying drawings. In addition, the following embodiments do not limit the invention according to the scope of claims. In addition, although a plurality of features are described in the embodiments, not all of them are essential to the invention, and the plurality of features may be combined arbitrarily. Furthermore, in the accompanying drawings, the same or similar configurations are denoted by the same reference numerals, and redundant description is omitted.
なお、以下の実施形態では、本発明をパーソナルコンピュータで実施する場合に関して説明する。しかし、本発明は画像処理が可能な任意の電子機器でも実施可能である。このような電子機器には、デジタルカメラ、タブレットコンピュータ、メディアプレーヤ、PDA、携帯電話機、スマートフォン、ゲーム機、ロボット、ドローン、ドライブレコーダが含まれる。これらは例示であり、本発明は他の電子機器でも実施可能である。 In the following embodiments, the case where the present invention is implemented by a personal computer will be described. However, the present invention can be implemented with any electronic device capable of image processing. Such electronic devices include digital cameras, tablet computers, media players, PDAs, mobile phones, smart phones, game consoles, robots, drones, and drive recorders. These are examples, and the present invention can also be implemented in other electronic devices.
●(第1実施形態)
図1は、本発明の実施形態に係る画像処理装置の一例としてのパーソナルコンピュータ(PC)102と、PC500が処理する画像データを生成するデジタルカメラ100(以下、カメラ100という)とを有する画像処理システムの模式図である。
● (first embodiment)
FIG. 1 shows image processing having a personal computer (PC) 102 as an example of an image processing apparatus according to an embodiment of the present invention, and a digital camera 100 (hereinafter referred to as camera 100) that generates image data to be processed by the PC 500. 1 is a schematic diagram of a system; FIG.
カメラ100は、2眼レンズユニット300を用いて、視野が立体視180度・ステレオ180度の撮像画像(以下、VR画像という。)のデータを取得することができる。本実施形態ではカメラ100がレンズ交換式であるものとするが、レンズ交換式でなくてもよい。本実施形態において、2眼レンズユニット300は、視野が180度の円周魚眼像を形成する結像光学系を2つ収容している。視差のある円周魚眼像を用いて、立体感のある仮想現実(VR)画像を再生することができる。2眼レンズユニット300の構成の詳細については後述する。
The
PC500は、一般的なパーソナルコンピュータであり、アプリケーションソフトウェアを実行することにより、本実施形態の画像処理装置として機能する。PC500はカメラ100が撮像処理を実行することにより取得した撮像画像データを、有線もしくは無線通信150を通じてカメラ100から直接取得することができる(図1(a))。また、PC500は、カメラ100が例えば半導体メモリカードであるリムーバブルメディア160に記録した撮像画像データを読み込むことによって撮像画像データを取得してもよい(図1(b))。
The PC 500 is a general personal computer and functions as an image processing apparatus of this embodiment by executing application software. The PC 500 can directly acquire the captured image data acquired by the
次に、カメラ100について説明する。図2は、カメラ100の外観例を示す斜視図である。図2(a)はカメラ100を正面斜め上方向から、図2(b)はカメラ100を背面斜め上方向から見た斜視図である。
Next, the
カメラ100は、上面に、シャッターボタン101、電源スイッチ102、モード切替スイッチ103、メイン電子ダイヤル104、サブ電子ダイヤル105、動画ボタン106、ファインダ外表示部107を有する。シャッターボタン101は、撮影準備あるいは撮影指示を行うための操作部である。電源スイッチ102は、カメラ100の電源のオンとオフとを切り替える操作部である。モード切替スイッチ103は、各種モードを切り替えるための操作部である。メイン電子ダイヤル104は、シャッター速度や絞り等の設定値を変更するための回転式の操作部である。サブ電子ダイヤル105は、選択枠(カーソル)の移動や画像送り等を行うための回転式の操作部である。動画ボタン106は、動画撮影(記録)の開始や停止の指示を行うための操作部である。ファインダ外表示部107は、シャッター速度や絞り等の様々な設定値を表示する。
The
カメラ100は、背面に、表示部108、タッチパネル109、方向キー110、SETボタン111、AEロックボタン112、拡大ボタン113、再生ボタン114、メニューボタン115、接眼部116、接眼検知部118、タッチバー119を有する。表示部108は、画像や各種情報を表示する。タッチパネル109は、表示部108の表示面(タッチ操作面)に対するタッチ操作を検出する操作部である。
The
方向キー110は、上下左右にそれぞれ押下可能なキー(4方向キー)から構成される操作部である。方向キー110の押下した位置に応じた操作が可能である。SETボタン111は、主に選択項目を決定するときに押下される操作部である。AEロックボタン112は、撮影待機状態で露出状態を固定するときに押下される操作部である。拡大ボタン113は、撮影モードのライブビュー表示(LV表示)において拡大モードのオンとオフとを切り替えるための操作部である。拡大モードがオンである場合にはメイン電子ダイヤル104を操作することにより、ライブビュー画像(LV画像)が拡大または縮小する。また、拡大ボタン113は、再生モードにおいて再生画像を拡大させたり、拡大率を大きくさせたりするときに用いられる。
The
再生ボタン114は、撮影モードと再生モードとを切り替えるための操作部である。撮影モードの場合に再生ボタン114を押下することで再生モードに移行し、後述する記録媒体227に記録された画像のうち最新の画像を表示部108に表示させることができる。メニューボタン115は、各種設定が可能なメニュー画面を表示部108に表示させるときに押下される操作部である。ユーザは、表示部108に表示されたメニュー画面を、方向キー110とSETボタン111を用いて操作することにより、カメラ100の各種設定を行うことができる。なお、ボタンを用いる代わりに、あるいはボタンと併用してタッチパネル109を用いてメニュー画面を操作可能としてもよい。
A
接眼部116は、接眼ファインダ(覗き込み型のファインダ)117を覗くための窓である。ユーザは接眼部116を介して内部の後述するEVF(Electronic View Finder)217に表示された画像を視認することができる。接眼検知部118は、接眼部116に物体が近接しているか否かを検知するセンサである。
An
タッチバー119は、タッチ操作を受け付けることが可能なライン状のタッチ操作部(ラインタッチセンサ)である。タッチバー119は、右手の人差し指でシャッターボタン101を押下可能なようにグリップ部120を右手で握った状態(右手の小指、薬指、中指で握った状態)で、右手の親指でタッチ操作可能(タッチ可能)な位置に配置される。すなわち、タッチバー119は接眼部116を通じて接眼ファインダ117を覗き、いつでもシャッターボタン101を押下できるように構えた状態(撮影姿勢)で操作可能である。タッチバー119は、タッチバー119に対するタップ操作(タッチして所定期間以内にタッチ位置を移動せずに離す操作)、左右へのスライド操作(タッチしたままタッチ位置を移動する操作)等を受け付け可能である。タッチバー119は、タッチパネル109とは異なる操作部であり、表示機能を備えていない。本実施形態のタッチバー119は、マルチファンクションバー(M-Fnバー)として機能する。
The
また、カメラ100は、グリップ部120、サムレスト部121、端子カバー122、蓋123、通信端子124等を有する。グリップ部120は、ユーザがカメラ100を構える際に右手で握りやすい形状に形成された保持部である。グリップ部120を右手の小指、薬指、中指で握ってカメラ100を保持した状態で、右手の人差指で操作可能な位置にシャッターボタン101とメイン電子ダイヤル104が配置される。また、同様な状態で、右手の親指で操作可能な位置にサブ電子ダイヤル105とタッチバー119が配置される。
The
サムレスト部121(親指待機位置)は、カメラ100の背面側の、どの操作部も操作しない状態でグリップ部120を握った右手の親指を置きやすい箇所に設けられたグリップ部である。サムレスト部121は、保持力(グリップ感)を高めるためのラバー部材等で構成される。端子カバー122は、カメラ100を外部機器に接続する接続ケーブル等のコネクタを保護する。蓋123は、後述する記録媒体227を格納するためのスロットを閉塞することで記録媒体227およびスロットを保護する。通信端子124は、カメラ100が着脱可能な後述するレンズユニット200側と通信を行うための端子である。
The thumb rest portion 121 (thumb standby position) is a grip portion provided on the rear side of the
<カメラ100の内部構成>
図3は、カメラ100に交換可能なレンズユニット200が装着されたカメラシステムの内部構成(機能構成)例を示すブロック図である。なお、図3において、図2に示した構成には図2と同一符号を付してある。図2に関して既に説明した構成については説明を適宜、省略する。
<Internal Configuration of
FIG. 3 is a block diagram showing an example of the internal configuration (functional configuration) of a camera system in which the
まず、レンズユニット200について説明する。
レンズユニット200は、カメラ100に着脱可能な交換レンズの一例である。レンズユニット200は一般的な1眼レンズ(光軸が1つのレンズ)である。レンズユニット200は、絞り201、レンズ202、絞り駆動回路203、AF(オートフォーカス)駆動回路204、レンズシステム制御回路205、通信端子206等を有する。
First, the
The
絞り201は、開口径が調整可能に構成される。レンズ202は、複数枚のレンズから構成される。絞り駆動回路203は、絞り201の開口径を制御することで光量を調整する。AF駆動回路204は、レンズ202に含まれるフォーカスレンズを駆動し、レンズユニット200が合焦する距離を調節する。
The
レンズシステム制御回路205は、例えばCPU、ROM、およびRAMを有し、ROMに記憶されたプログラムをRAMに読み込んでCPUが実行することにより、レンズユニット200の各部の動作を制御する。レンズユニット200とカメラ100とは通信端子206および124を通じて電気的に接続され、レンズシステム制御回路205とカメラ100が有するシステム制御部50とは相互に通信可能である。レンズシステム制御回路205は、システム制御部50の指示に基づいて、絞り駆動回路203、AF駆動回路204等を制御する。
The lens
次に、カメラ100について説明する。
カメラ100は、シャッター210、撮像部211、A/D変換器212、メモリ制御部213、画像処理部214、メモリ215、D/A変換器216、EVF217、表示部108、システム制御部50を有する。
Next, the
The
シャッター210は、システム制御部50の指示に基づいて動作し、撮像部211の露光時間を制御するフォーカルプレーンシャッターである。撮像部211は、光学像を電気信号に変換するCCDやCMOS素子等で構成される撮像素子(イメージセンサ)である。本実施形態において、撮像部211は、撮像面位相差検出方式のオートフォーカス(撮像面位相差AF)に対応した撮像素子である。具体的には、撮像部211は、位相差検出方式のオートフォーカスを実現するための焦点検出用信号対を出力可能である。
The
A/D変換器212は、撮像部211から出力されるアナログ信号をデジタル信号(画像データ)に変換する。画像処理部214は、A/D変換器212またはメモリ制御部213を通じて入力されるデータに対し所定の処理(画素補間、縮小等のリサイズ処理、色変換処理等)を行う。また、画像処理部214は、撮影した画像データを用いて所定の演算処理を行い、AFやAEに用いる評価値などを算出する。得られた演算結果に基づいてシステム制御部50が露光制御や焦点検出制御を行う。撮像部211から得られる焦点検出用信号対に基づくデフォーカス量も、評価値の1つとして画像処理部214が算出する。さらに、画像処理部214は、撮影した画像データを用いて所定の演算処理を行い、得られた演算結果に基づいて画像データに対するAWB(オートホワイトバランス)処理を行う。
The A/
A/D変換器212からの画像データは、画像処理部214およびメモリ制御部213を介してメモリ215に書き込まれる。あるいは、A/D変換器212からの画像データは、画像処理部214を介さずにメモリ制御部213を介してメモリ215に書き込まれる。メモリ215は、A/D変換器212が出力する画像データや、画像処理部214が生成した画像データなどを格納する。画像処理部214が生成する画像データには、表示部108やEVF217に表示するための表示用画像データおよび、記録媒体227に記録するための記録用画像データが含まれる。メモリ215は、所定枚数分の静止画像データや、所定時間分の動画像データおよび音声データを格納するのに十分な記憶容量を備えている。また、メモリ215の一部領域は表示部108用のビデオメモリとして用いられる。
Image data from the A/
D/A変換器216は、メモリ215に格納されている画像データを表示部108やEVF217で表示するのに適したアナログ信号に変換する。したがって、メモリ215に書き込まれた表示用画像データは、D/A変換器216を介して表示部108やEVF217に表示される。表示部108やEVF217は、D/A変換器216からのアナログ信号に応じた表示を行う。表示部108やEVF217は、例えば、LCDや有機EL等のディスプレイである。
A D/
撮像部211で動画撮影を行いながら、A/D変換器212を通じてメモリ215に格納された画像データをD/A変換器216でアナログ信号に変換し、表示部108やEVF217に逐次転送して表示する。これにより、表示部108やEVF217におけるライブビュー表示を行うことができる。
While the
システム制御部50は、少なくとも1つのプロセッサ(CPU)および/または少なくとも1つの回路からなる制御部である。すなわち、システム制御部50は、プロセッサ(CPU)であってもよく、回路であってもよく、プロセッサと回路の組み合わせであってもよい。例えばシステム制御部50がプロセッサ(CPU)を有する場合、不揮発性メモリ219に記憶されたプログラムをシステムメモリ218に読み込んでプロセッサで実行することにより、システム制御部50は、カメラ100全体を制御する。また、システム制御部50は、メモリ215、D/A変換器216、表示部108、EVF217等を制御することにより表示制御も行う。
The
また、カメラ100は、システムメモリ218、不揮発性メモリ219、システムタイマ220、通信部221、姿勢検知部222、接眼検知部118を有する。
システムメモリ218は、例えばRAMが用いられる。システムメモリ218には、システム制御部50の動作用の定数、変数、不揮発性メモリ219から読み出したプログラム等が展開される。
不揮発性メモリ219は、例えば電気的に消去・記録可能なEEPROMであってよい。不揮発性メモリ219には、システム制御部50の動作用の定数、プログラム等が記録される。
The
A RAM, for example, is used for the
The nonvolatile memory 219 may be, for example, an electrically erasable/recordable EEPROM. Constants for operation of the
システムタイマ220は、各種制御に用いる時間や、内蔵された時計の時間を計測する計時部である。通信部221は、無線または有線ケーブルによって接続された外部機器との間で、画像信号や音声信号の送受信を行う。通信部221は無線LAN(Local Area Network)に準拠した外部機器や、インターネット上の機器とも通信可能である。また、通信部221は、Bluetooth(登録商標)に準拠した外部機器と通信可能である。通信部221は撮像部211で撮影した画像(ライブ画像を含む)や、記録媒体227に記録された画像を送信可能であり、外部機器から画像データやその他の各種情報を受信することができる。
The
姿勢検知部222は、重力方向に対するカメラ100の姿勢を表す信号を出力する。姿勢検知部222が出力する信号に基づいて、撮像部211で撮影された画像が、カメラ100を横に構えて撮影された画像であるか、縦に構えて撮影された画像であるかを判別可能である。システム制御部50は、姿勢検知部222の出力する信号に応じた向き情報を撮像部211で撮影された画像の画像ファイルに付加したり、画像を回転して記録したりすることが可能である。姿勢検知部222は、例えば、加速度センサやジャイロセンサ等を用いることができる。システム制御部50は、姿勢検知部222の出力信号に基づいて、カメラ100の動き(パン、チルト、持ち上げ、静止しているか否か等)を検知することも可能である。
The orientation detection unit 222 outputs a signal representing the orientation of the
接眼検知部118は、EVF217を内蔵する接眼ファインダ117の接眼部116に対する何らかの物体の接近を検知することができる。接眼検知部118は、例えば、赤外線近接センサを用いることができる。物体が接近した場合、接眼検知部118の投光部から投光した赤外線が物体で反射して赤外線近接センサの受光部で受光される。受光された赤外線の量によって接眼部116に近接した物体の有無を判別することができる。
The
システム制御部50は、接眼検知部118で検知された近接物体の有無に応じて、表示部108とEVF217の表示(表示状態)/非表示(非表示状態)を切り替える。具体的には、少なくとも撮影待機状態であって、かつ、表示先の切替設定が自動切替である場合、接近物体が検出されていなければ表示部108の表示をオンとし、EVF217の表示はオフとする。また、接近物体が検出されていればEVF217の表示をオンとし、表示部108の表示はオフとする。なお、接眼検知部118は、赤外線近接センサである場合に限られず、接眼とみなせる状態を検知できるものであれば他のセンサを用いてもよい。
The
カメラ100はまた、ファインダ外表示部107、ファインダ外表示駆動回路223、電源制御部224、電源部225、記録媒体I/F226、操作部228、映像信号出力I/F240等を有する。
The
ファインダ外表示部107は、ファインダ外表示駆動回路223を介して、シャッター速度や絞り等のカメラ100の様々な設定値を表示する。電源制御部224は、電池検出回路、DC-DCコンバータ、通電するブロックを切り替えるスイッチ回路等により構成され、電池の装着の有無、電池の種類、電池残量の検出等を行う。また、電源制御部224は、その検出結果およびシステム制御部50の指示に基づいてDC-DCコンバータを制御し、必要な電圧を必要な期間、記録媒体227を含む各部へ供給する。電源部225は、アルカリ電池およびリチウム電池等の一次電池、NiCd電池、NiMH電池およびLi電池等の二次電池、ACアダプター等である。記録媒体I/F226は、メモリカードやハードディスク等の記録媒体227とのインターフェースである。
The
記録媒体227は、撮影された画像を記録するためのメモリカード等であり、半導体メモリや磁気ディスク等から構成される。記録媒体227は、着脱可能であってもよく、内蔵されていてもよい。映像信号出力I/F240は、カメラ100から画像信号を外部機器に出力するためのインターフェースである。映像信号出力I/F240は規格に準拠した1つ以上のインターフェースを有する。規格に特に制限はないが、例えばHDMI(登録商標)規格に準拠したインターフェースであってよい。カメラ100は、例えば撮影中の動画データを映像信号出力I/F240に接続された外部機器(映像信号受信装置241)に出力する。図1(a)におけるPC500は映像信号受信装置241に相当する。
A
操作部228は、ユーザからの操作(ユーザ操作)を受け付ける入力部であり、システム制御部50に各種の指示を入力するために用いられる。操作部228は、シャッターボタン101、電源スイッチ102、モード切替スイッチ103、タッチパネル109、他の操作部材229等が含まれる。他の操作部材229には、メイン電子ダイヤル104、サブ電子ダイヤル105、動画ボタン106、方向キー110、SETボタン111、AEロックボタン112、拡大ボタン113、再生ボタン114、メニューボタン115、タッチバー119等が含まれる。
The
シャッターボタン101は、第1シャッタースイッチ230と第2シャッタースイッチ231を有する。第1シャッタースイッチ230は、シャッターボタン101の操作途中、いわゆる半押しでオンとなり、第1シャッタースイッチ信号SW1を発生させる。システム制御部50は、第1シャッタースイッチ信号SW1を撮影準備指示と解釈し、撮影準備処理を開始させる。撮影準備処理には、AF処理、AE処理、AWB処理、フラッシュプリ発光処理などが含まれる。
The
第2シャッタースイッチ231は、シャッターボタン101の操作完了、いわゆる全押しでオンとなり、第2シャッタースイッチ信号SW2を発生する。システム制御部50は、第2シャッタースイッチ信号SW2を静止画の撮影指示と解釈し、AE処理で決定した露出条件に基づく静止画撮影動作を開始する。そして、撮像部211からの信号読み出しから、撮影で得られた制止画像データを含む画像ファイルを生成して記録媒体227に書き込むまでの一連の撮影処理を実行するように各部を制御する。
The second shutter switch 231 is turned on when the operation of the
モード切替スイッチ103は、システム制御部50の動作モードを静止画撮影モード、動画撮影モード、再生モード等の何れかに切り替える。静止画撮影モードに含まれるモードには、オート撮影モード、オートシーン判別モード、マニュアルモード、絞り優先モード(Avモード)、シャッター速度優先モード(Tvモード)、プログラムAEモード(Pモード)がある。また、撮影シーン別の撮影設定となる各種シーンモード、カスタムモード等がある。ユーザは、モード切替スイッチ103により、上述した撮影モードの何れかに直接、切り替えることができる。あるいは、ユーザは、モード切替スイッチ103により撮影モードの一覧画面に一旦切り替えた後に、表示された複数のモードの何れかに操作部228を用いて選択的に切り替えることができる。同様に、動画撮影モードにも複数のモードが含まれていてもよい。
A
タッチパネル109は、表示部108の表示面(タッチパネル109の操作面)への各種タッチ操作を検出するタッチセンサである。タッチパネル109と表示部108とは一体的に構成することができる。例えば、タッチパネル109は表示部108の表示面の上層に取り付けられる。そして、タッチパネル109における入力座標と、表示部108の表示面上の表示座標とを対応付けることで、あたかもユーザが表示部108上に表示された画面を直接的に操作可能であるかのようなGUIを構成できる。GUIはGraphical User Interfaceの略である。タッチパネル109には、抵抗膜方式や静電容量方式、表面弾性波方式、赤外線方式、電磁誘導方式、画像認識方式、光センサ方式等の様々な方式のうち何れかの方式を用いることができる。方式によって、タッチパネル109に対する接触があったことでタッチがあったと検知する方式や、タッチパネル109に対する指やペンの接近があったことでタッチがあったと検知する方式があるが、何れの方式であってもよい。
The
システム制御部50は、タッチパネル109に対する以下の操作あるいは状態を検出できる。
・タッチパネル109にタッチしていなかった指やペンが新たにタッチパネル109にタッチしたこと、すなわちタッチの開始(以下、タッチダウン(Touch-Down)という)。
・タッチパネル109を指やペンでタッチしている状態(以下、タッチオン(Touch-On)という)。
・タッチパネル109を指やペンがタッチしたまま移動していること(以下、タッチムーブ(Touch-Move)という)。
・タッチパネル109へタッチしていた指やペンがタッチパネル109から離れた(リリースされた)こと、すなわちタッチの終了(以下、タッチアップ(Touch-Up)という)。
・タッチパネル109に何もタッチしていない状態(以下、タッチオフ(Touch-Off)という)。
The
The
A state in which the
- The
- The finger or pen touching the
A state in which nothing is touched on the touch panel 109 (hereinafter referred to as Touch-Off).
タッチダウンが検出されると、同時にタッチオンも検出される。タッチダウンの後、タッチアップが検出されない限りは、通常はタッチオンが検出され続ける。タッチムーブが検出された場合も、同時にタッチオンが検出される。タッチオンが検出されていても、タッチ位置が移動していなければタッチムーブは検出されない。タッチしていた全ての指やペンがタッチアップしたことが検出された後は、タッチオフとなる。 When touchdown is detected, touchon is also detected at the same time. After touchdown, touchon continues to be detected unless touchup is detected. Touch-on is detected at the same time when touch-move is detected. Even if touch-on is detected, touch-move is not detected if the touch position does not move. After it is detected that all the fingers and pens that have touched have touched up, the touch is turned off.
これらの操作・状態や、タッチパネル109上に指やペンがタッチしている位置座標はシステム制御部50に通知される。システム制御部50は通知された情報に基づいてタッチパネル109上にどのような操作(タッチ操作)が行なわれたかを判定する。タッチムーブについてはタッチパネル109上で移動する指やペンの移動方向についても、位置座標の変化に基づいて、タッチパネル109上の垂直成分・水平成分毎に判定できる。所定距離以上をタッチムーブしたことが検出された場合はスライド操作が行なわれたと判定される。タッチパネル109上に指をタッチしたままある程度の距離だけ素早く動かして、そのまま離すといった操作をフリックという。フリックは、言い換えればタッチパネル109上を指ではじくように素早くなぞる操作である。所定距離以上を、所定速度以上でタッチムーブしたことが検出され、そのままタッチアップが検出されるとフリックが行なわれたと判定される(スライド操作に続いてフリックがあったものと判定できる)。更に、複数箇所(例えば2点)を共にタッチして(マルチタッチして)、互いのタッチ位置を近づけるタッチ操作をピンチイン、互いのタッチ位置を遠ざけるタッチ操作をピンチアウトという。ピンチアウトとピンチインを総称してピンチ操作(あるいは単にピンチ)という。
The
<多眼レンズユニットの構成>
図4は、多眼レンズユニットの一例としての2眼レンズユニット300の構成例を示す模式図である。2眼レンズユニット300は、VR180規格に準拠したVR画像を形成するVR180レンズユニットである。なお、本明細書において「多眼レンズ」とは、1つのレンズマウント(または鏡筒)内に複数の結像光学系が設けられた構成のレンズユニットであり、光軸を複数有する。図4では、2眼レンズユニット300をカメラ100に装着した状態を示している。なお、図4では図3に示したカメラ100の構成の一部のみを示している。
<Structure of multi-lens unit>
FIG. 4 is a schematic diagram showing a configuration example of a twin-
2眼レンズユニット300は、カメラ100に着脱可能な交換レンズの一種である。2眼レンズユニット300は、1つの鏡筒内に2つの結像光学系301Lおよび301Rを有し、したがって、光軸を2つ有する。
The
ここでは、2眼レンズユニット300をカメラ100に装着した際、2つの光軸が水平直線上に並ぶように2つの結像光学系301Lおよび301Rが配置されているものとする。2つの結像光学系301Lおよび301Rは略180度の視野角を有し、前方半球の範囲を撮影できる。具体的には、2つの結像光学系301Lおよび301Rはそれぞれ、左右方向(水平角度、方位角、ヨー角)180度、上下方向(垂直角度、仰俯角、ピッチ角)180度の視野を撮影できる。2つの結像光学系301Lおよび301Rは左右に視差を有する1対の視差画像を撮像部211の撮像面に結像する。以下の説明では結像光学系301Lを左眼光学系301L、結像光学系301Rを右眼光学系301Rと呼ぶ。
Here, it is assumed that the two imaging
右眼光学系301Rおよび左眼光学系301Lはそれぞれ、複数のレンズと反射ミラー等を有する。複数のレンズには少なくとも、合焦距離を調整するためのフォーカスレンズが含まれる。2眼レンズユニット300はまた、レンズシステム制御回路303を有する。右眼光学系301Rは第1の光学系の一例であり、左眼光学系301Lは第2の光学系の一例である。右眼光学系301Rおよび左眼光学系301Lはそれぞれ被写体側に位置する各レンズ302R、302Lが同じ方向を向いており、各光軸が略平行である。
The right-eye
なお、図4には示していないが、2眼レンズユニット300は、AF駆動回路204と同様の構成を有する。この場合、右眼光学系301Rおよび左眼光学系301Lのフォーカスレンズを連動して駆動するAF駆動回路と、右眼光学系301Rおよび左眼光学系301Lの少なくとも一方のフォーカスレンズを独立して駆動するAF駆動回路との1つ以上を有しうる。フォーカスレンズの駆動は、システム制御部50の制御に基づいてレンズシステム制御回路303が実施する。
Although not shown in FIG. 4, the
また、2眼レンズユニット300は、鏡筒に設けられたフォーカスリングの回転量および回転方向を検知するエンコーダをさらに有する。レンズシステム制御回路303は、エンコーダが検出したフォーカスレンズ操作に応じてAF駆動回路を制御することにより、いわゆるバイワイヤ方式によるマニュアルフォーカス機能を提供する。この場合、2眼レンズユニット300は、フォーカスリング操作によって駆動するフォーカスレンズをユーザが切り替え可能なスイッチを有してもよい。
In addition, the
2眼レンズユニット300は、2眼立体視が可能なVR画像のフォーマットであるVR180フォーマットの画像をカメラ100で撮影するためのVR180用レンズである。VR180用レンズは、右眼光学系301Rおよび左眼光学系301Lがそれぞれ略180度の視野角を有する魚眼レンズを有する。なお、右眼光学系301Rおよび左眼光学系301LはVR180としての2眼VR表示が可能な画像が取得できればよく、視野角は160度程度であってもよい。VR180用レンズは、右眼光学系301Rにより右像(第一像)を、左眼光学系301Lにより左像(第二像)を、同一撮像面上に形成することができる。ここではカメラ100の撮像部211が1つの撮像素子を有し、2眼レンズユニット300が1つの撮像素子の撮像面に右像および左像を形成するものとする。しかしながら、カメラ100が並列配置された2つの撮像素子を有し、2眼レンズユニット300が一方の撮像素子の撮像面に右像を、他方の撮像素子の撮像面に左像を形成してもよい。
The twin-
2眼レンズユニット300は、右眼光学系301Rのフォーカス調整を行うフォーカスリングと、左眼光学系301Lのフォーカス調整を行うフォーカスリングとを備える。もしくは、右眼光学系301Rおよび左眼光学系301Lのフォーカス調整を同時に行うフォーカスリングと、右眼光学系301Rと左眼光学系301Lの一方のフォーカス調整を行うフォーカスリングとを備える。これらのフォーカスリングを操作することで、ユーザは右眼光学系301Rおよび左眼光学系301Lの合焦距離を手動で調整することができる。これらのフォーカスリングは個別に設けられてもよいし、バイワイヤ方式の場合には1つのフォーカスリングの機能を切り替えることで実現されてもよい。
The twin-
2眼レンズユニット300は、(1眼)レンズユニット200と同様、マウント部を介してカメラ100に装着される。マウント部は、レンズマウント部304とカメラマウント部305とから構成される。2眼レンズユニット300がカメラ100に装着されると、カメラ100の通信端子124と、2眼レンズユニット300の通信端子306とが電気的に接続される。これにより、カメラ100のシステム制御部50と2眼レンズユニット300のレンズシステム制御回路303とは互いに通信可能となる。ただし、本実施形態においてカメラ100は、2眼レンズユニット300から、2眼レンズユニット300がVR180レンズであることや、円周魚眼像である右像と左像の位置関係が逆転することを判定可能な情報を取得できないものとする。2眼レンズユニット300がVR180レンズであることを判定可能な情報とは、例えば、円周魚眼中心座標や円周魚眼半径などであってよい。
The twin-
本実施形態では、右像と左像とは、左右方向に離間して撮像部211の撮像面に形成される。すなわち、右眼光学系301Rおよび左眼光学系301Lにより形成される2つの光学像が1つの撮像素子上に形成される。撮像部211は、結像された被写体像(光信号)をアナログ電気信号に変換する。このように、2眼レンズユニット300を装着することにより、右眼光学系301Rと左眼光学系301Lが形成する視差画像対(右像および左像)を1回の撮影で取得することができる。また、取得された右像と左像とを右眼用の画像と左眼用の画像としてVR表示することにより、ユーザは略180度の範囲の立体的なVR画像、いわゆるVR180画像を観察することができる。
In this embodiment, the right image and the left image are formed on the imaging surface of the
図5は、(1眼)レンズユニット200と2眼レンズユニット300が撮像部211に形成する被写体像の模式図である。左側が(1眼)レンズユニット200、右側が2眼レンズユニット300について示している。ここでは、中央に被写体(人物の顔)401が存在するシーンを撮影するものとする。また、便宜上、各レンズユニットの結像光学系の画角の差については無視している。
FIG. 5 is a schematic diagram of a subject image formed in the
(1眼)レンズユニット200が撮像部211に形成する被写体像は被写体401の倒立正像(上下左右が逆の正像)である。したがって、撮像画像402aを画像中心周りに180度回転させると、撮影シーンと被写体401の上下左右が正しい画像403aが得られる。
The subject image formed by the (single-lens)
一方、2眼レンズユニット300の場合、左眼光学系301Lと右眼光学系301Rとがそれぞれ撮像部211に被写体401の倒立正像を形成した撮像画像402bが得られる。撮像画像402bを画像中心周りに180度回転させると、画像403bが得られる。画像403bのように、左眼光学系301Lと右眼光学系301Rが形成する円周魚眼像を記録する形式をメッシュ形式、2つの像が左右に並べて配置される形式をサイドバイサイド形式と呼ぶこともある。画像403bでは、被写体401の上下左右は撮影シーンと等しくなるが、右眼光学系301Rが形成した被写体像(右像)が左側に、左眼光学系301Lが形成した被写体像(左像)が右側に存在し、右像と左像の位置関係が逆転している。したがって、画像403bにおける右側の被写体像を右像、左側の被写体像を左像として用いると、正しい表示が行えない。
On the other hand, in the case of the twin-
撮像画像に右像と左像が含まれ、かつ右像と左像の位置関係が逆転していることをカメラ100が認識できれば、右像および左像に関する情報を撮像画像のデータに関連付けて記録すれば、撮像画像から右像および左像を正しく利用できる。しかしながら、撮像画像に右像と左像が含まれ、かつ右像と左像の位置関係が逆転していることをカメラ100が認識できない場合、右像および左像に関する情報を撮像画像のデータに関連付けて記録することはできない。本実施形態は、このような場合でも、撮像画像から右像および左像を正しく利用することを可能にする。詳細については後述する。
If the
ここで、VR画像とは、後述するVR表示することができる画像である。VR画像には、全方位カメラ(全天球カメラ)で撮影した全方位画像(全天球画像)や、表示部に一度で表示できる表示範囲より広い画像範囲(有効画像範囲)を持つパノラマ画像等が含まれる。また、VR画像は、静止画および動画のいずれであってもよい。動画は記録済みの動画であってもライブ画像(カメラからほぼリアルタイムで取得した画像)であってもよい。 Here, the VR image is an image that can be displayed in VR, which will be described later. The VR image can be an omnidirectional image (omnidirectional image) captured by an omnidirectional camera (omnidirectional camera) or a panoramic image with an image range (effective image range) that is wider than the display range that can be displayed on the display unit at once. etc. are included. Also, the VR image may be either a still image or a moving image. The moving images may be prerecorded moving images or live images (images captured from a camera in near real time).
VR画像は、最大で、左右方向360度、上下方向360度の視野分の画像範囲(有効画像範囲)を持つ。また、VR画像には、左右方向360度未満、上下方向360度未満であっても、通常のカメラで撮影可能な画角よりも広範な画角、あるいは、表示部に一度で表示できる表示範囲より広い画像範囲を持つ画像も含まれる。上述した2眼レンズユニット300を用いてカメラ100で撮影される画像は、VR画像の一種である。VR画像は、例えば、表示装置(VR画像を表示できる表示装置)の表示モードを「VRビュー」に設定することでVR表示することができる。360度の画角を有するVR画像をVR表示させて、ユーザが表示装置の姿勢を左右方向(水平回転方向)に変化させることで、左右方向に継ぎ目のない全方位の画像を観賞することができる。
A VR image has an image range (effective image range) of 360 degrees in the horizontal direction and 360 degrees in the vertical direction at maximum. In addition, even if the VR image is less than 360 degrees in the horizontal direction and less than 360 degrees in the vertical direction, the angle of view that is wider than the angle of view that can be taken with a normal camera, or the display range that can be displayed at once on the display unit Images with a wider image range are also included. An image captured by the
ここで、VR表示(VRビュー)とは、VR画像に撮影されている視野のうち、表示装置の姿勢に応じた所定範囲の視野の画像を表示する表示モードである。VR表示には、VR画像を仮想球体にマッピングする変形(歪曲補正が施される変形)を行って1つの画像を表示する「1眼VR表示(1眼VRビュー)」がある。また、VR表示には、左眼用のVR画像と右眼用のVR画像とをそれぞれ仮想球体にマッピングする変形を行って左右の領域に並べて表示する「2眼VR表示(2眼VRビュー)」がある。 Here, the VR display (VR view) is a display mode for displaying an image of a predetermined range of the field of view according to the orientation of the display device, out of the field of view captured in the VR image. VR display includes “single-lens VR display (single-lens VR view)” in which one image is displayed by performing deformation (distortion-corrected deformation) that maps a VR image onto a virtual sphere. In addition, for VR display, there is a "twin-eye VR display (twin-eye VR view)" in which a VR image for the left eye and a VR image for the right eye are transformed by mapping onto a virtual sphere and displayed side by side in the left and right regions. There is.
互いに視差のある左眼用のVR画像と右眼用のVR画像を用いて「2眼VR表示」を行うことで立体視することが可能である。何れのVR表示であっても、例えば、ユーザがHMD(ヘッドマウントディスプレイ)等の表示装置を装着した場合、ユーザの顔の向きに応じた視野範囲の画像が表示される。例えば、VR画像のうち、ある時点で左右方向に0度(特定の方位、例えば北)、上下方向に90度(天頂から90度、すなわち水平)を中心とした視野範囲の画像を表示しているとする。この状態から表示装置の姿勢を表裏反転させる(例えば、表示面を南向きから北向きに変更する)と、同じVR画像のうち、左右方向に180度(逆の方位、例えば南)、上下方向に90度を中心とした視野範囲の画像に、表示範囲が変更される。すなわち、ユーザがHMDを装着した状態で、顔を北から南に向く(すなわち後ろを向く)ことで、HMDに表示される画像も北の画像から南の画像に変更される。 A stereoscopic view is possible by performing “dual-eye VR display” using a VR image for the left eye and a VR image for the right eye that have parallax with each other. In any VR display, for example, when a user wears a display device such as an HMD (head-mounted display), an image within a visual field corresponding to the orientation of the user's face is displayed. For example, at a certain point in the VR image, display an image of a viewing range centered at 0 degrees in the horizontal direction (a specific direction, such as north) and 90 degrees in the vertical direction (90 degrees from the zenith, that is, horizontal). Suppose there is When the posture of the display device is reversed from this state (for example, the display surface is changed from facing south to facing north), the same VR image can be displayed by 180 degrees in the horizontal direction (opposite direction, for example, south), and by 180 degrees in the vertical direction. The display range is changed to an image with a visual field range centered at 90 degrees. That is, when the user wears the HMD and turns his face from north to south (that is, turns his back), the image displayed on the HMD is also changed from the north image to the south image.
なお、本実施形態の2眼レンズユニット300を用いて撮影したVR画像は、前方略180度の範囲を撮影したVR180フォーマットの画像であり、後方略180度の範囲の画像は存在しない。このようなVR180フォーマットの画像をVR表示させて、画像が存在しない側に表示装置の姿勢を変更した場合には例えばブランク領域が表示される。
Note that the VR image captured using the
このようにVR画像をVR表示することによって、ユーザは視覚的にあたかもVR画像内(VR空間内)にいるような感覚になる。なお、VR画像の表示方法は表示装置の姿勢を変更する方法に限られない。例えば、タッチパネルや方向ボタン等を介したユーザ操作に応じて、表示範囲を移動(スクロール)させてもよい。また、VR表示時(表示モード「VRビュー」時)において、姿勢変化による表示範囲の変更に加え、タッチパネルでのタッチムーブ、マウス等でのドラッグ操作、方向ボタンの押下等に応じて表示範囲を変更してもよい。なお、VRゴーグル(ヘッドマウントアダプタ)にスマートフォンなどの表示装置を装着した構成は、HMDの一種である。 By displaying a VR image in VR in this way, the user visually feels as if he or she is in the VR image (inside the VR space). Note that the display method of the VR image is not limited to the method of changing the posture of the display device. For example, the display range may be moved (scrolled) according to a user operation via a touch panel, direction buttons, or the like. In addition, when displaying VR (when the display mode is "VR view"), in addition to changing the display range due to changes in posture, the display range can be changed according to touch moves on the touch panel, drag operations with a mouse, etc., pressing direction buttons, etc. You can change it. A configuration in which a display device such as a smartphone is attached to VR goggles (head mount adapter) is a kind of HMD.
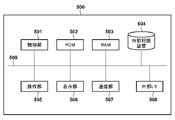
次にPC500について説明する。図6は、PC500の機能構成例を示すブロック図である。PC500はパーソナルコンピュータとして市販されている電子機器であってよい。
Next, the
制御部501はプログラムを実行可能なプロセッサであり、例えばCPU(Central Processing Unit)である。ROM(Read Only Memory)502は例えば電気的に書き換え可能な不揮発性メモリである。ROM502は、制御部501が実行するプログラム、各種の設定値やパラメータを記憶する。RAM(Random Access Memory)503は、制御部501が実行するプログラムをロードしたり、さまざまなデータを一時的に記憶したりするために用いられる。RAM503に一部は、バッファメモリやビデオメモリとして用いられてもよい。
The
外部記憶装置504は、PC500が内蔵する大規模記憶装置である。外部記憶装置504は、代表的にはハードディスクドライブ(HDD)またはソリッドステートドライブ(SSD)である。外部記憶装置504はHDDまたはSSDに加え、メモリカードリーダなど、リムーバブルメディアを用いる記憶装置を含んでもよい。外部記憶装置504にはOS(Operating System)、アプリケーションプログラム、ユーザデータなどが記憶される。外部記憶装置504の一部はメモリスワップ領域として用いられてもよい。カメラ100から受信したり、メモリカードから読み込んだりすることによって取得した画像データファイルは、外部記憶装置504のHDDまたはSSDに格納される。
The
操作部505は、キーボード、マウス、タッチパネルなど、ユーザが操作可能な入力デバイスの総称である。表示部506は例えば液晶ディスプレイ(LCD)であり、タッチパネルを有してもよい。表示部506は、PC500で稼働するOSやアプリケーションがさまざまな情報やデータを表示するために用いられる。
An
通信部507は例えば外部機器と無線通信を行うための通信回路を有する。通信部507は無線通信規格の1つ以上に準拠している。無線通信規格としては例えばBluetooth(登録商標)や無線LAN(IEEE 802.11x)などが代表的であるが、これらに限定されない。
The
外部I/F508は、例えば外部機器と有線通信を行うための通信回路を有する。外部I/F508は有線通信規格の1つ以上に準拠している。有線通信規格としては例えばUSB(Universal Serial Bus)、HDMI、Thunderbolt(登録商標)、イーサネット(登録商標)などが代表的であるが、これらに限定されない。
システムバス509は上述した各ブロックを相互に通信可能に接続する。
The external I/
A
次に、カメラ100の撮影動作について図7のフローチャートを用いて説明する。撮影動作は、システム制御部50がプログラムを実行して必要な制御を実行することによって実現される。図7に示す撮影動作は、例えば電源スイッチ102を操作することにより、ユーザがカメラ100の電源をオンにした際に開始される。システム制御部50は、電源オンに伴う起動処理を実行した後、カメラ100を撮影スタンバイ状態とする。撮影スタンバイ状態においてカメラ100は動画撮影を継続して行い、EVF217または表示部108にライブビュー表示を行うものとする。
Next, the photographing operation of
S601でシステム制御部50は、撮像部211から動画像の1フレームに相当する画像信号を読み出し、A/D変換器212に出力する。
S602でシステム制御部50は、画像処理部214にライブビュー表示用の画像データを生成させる。画像処理部214は、ライブビュー表示用の画像データをメモリ215のビデオメモリ領域に格納する。D/A変換器216はメモリ215のビデオメモリ領域に格納された画像データをD/A変換し、EVF217および表示部108の少なくとも一方に表示させる。また、画像処理部214は画像データに基づいて評価値を生成し、システム制御部50に出力する。システム制御部50は、評価値に基づいて露出条件を決定したり、レンズユニットの合焦距離を調整したりすることができる。
In S<b>601 , the
In S602, the
S603でシステム制御部50は、ユーザから記録開始指示がなされたか否かを判定する。システム制御部50は、例えば第2シャッタースイッチ信号SW2を検出した場合に、記録開始指示がなされたものと判定することができる。システム制御部50は、記録開始指示がなされたと判定されればS604を実行し、記録開始指示がなされたと判定されなければ次フレームのライブビュー表示のためにS601から再度実行する。このように、撮影スタンバイ状態において、システム制御部50は、記録開始指示がなされたと判定されるまで、ライブビュー表示動作を継続して実行する。なお、記録開始指示は、動画ボタン106の操作による動画記録の開始指示であってもよい。また、記録開始指示以外の指示を検出した場合、システム制御部50は指示に応じた動作を実行するが、その詳細については説明を省略する。
In S603, the
S604でシステム制御部50は、撮像部211から画像信号を読み出し、A/D変換器212に出力する。システム制御部50は、例えばライブビュー表示時よりも高解像度の画像信号を読み出す。システム制御部50は、画像処理部214に記録用の画像データを生成させる。画像処理部214は、記録用の画像データをメモリ215に格納する。
In S<b>604 , the
S605でシステム制御部50は、撮像画像データのメタデータとして記録する情報を取得する。システム制御部50は例えば撮影条件(撮影時のカメラ100およびレンズユニットの設定、状態に関する情報)や、現像処理に用いるパラメータなどを取得することができる。これらは例示であり、他の情報を取得してもよい。撮影条件には例えばシャッタースピード、絞り値、ISO感度などの露出条件、フレームレート、解像度、データの圧縮形式、色空間、ガンマ値、カメラ100の姿勢、フラッシュ点灯有無などが含まれうる。動画データの場合には、動画ファイル中のフレーム開始位置を示す情報もメタデータに含まれる。また、レンズユニットからレンズ情報が取得できる場合、レンズ情報もメタデータに含めることができる。なお、ここで例示していない情報をメタデータとして記録してもよい。
In S605, the
S606でシステム制御部50は、S604で画像処理部214が生成した記録用の画像データを格納したデータファイルを例えば記録媒体227に記録する。
S607でシステム制御部50は、S605で取得した情報を、画像データのメタデータとして、S606で記録したデータファイルに関連付けて記録する。本実施形態では、S606で記録したデータファイルにメタデータを記録する。
In S<b>606 , the
In S607, the
S608でシステム制御部50は、ユーザから記録終了指示がなされたか否かを判定する。システム制御部50は、例えば第2シャッタースイッチ信号SW2が検出されなければ、記録終了指示がなされたものと判定することができる。動画撮影の場合、システム制御部50は、例えば動画ボタン106の操作を検出すると、記録終了指示がなされたものと判定することができる。システム制御部50は、記録終了指示がなされたと判定されれば撮影動作を終了する。なお、システム制御部50は、撮影スタンバイ状態に戻るためにS601を実行してもよい。記録終了指示がなされたと判定されなければシステム制御部50はS604に戻って動画の次フレームまたは静止画の撮影を実行する。
In S608, the
カメラ100に2眼レンズユニット300が装着されている場合、2つの円周魚眼像が左右に配置され(メッシュ、サイドバイサイド形式)、円周魚眼像の左右の位置関係が逆転しているVR180画像(静止画または動画)が記録される。なお、静止画および動画のデータ形式に特に制限はなく、RAW形式であっても、現像処理後の形式(JPEG形式やMPEG形式など)であってもよい。なお、撮像画像は、記録媒体227へ記録する代わりに、あるいは記録媒体227への記録に加えて、映像信号出力I/F240を通じてPC500に送信されてもよい。PC500は、通信部507または外部I/F508を通じて受信した画像データファイルを外部記憶装置504に格納する。
When the two-
次に、PC500の画像データ表示動作について、図8のフローチャートを用いて説明する。以下の動作は、PC500において、制御部501が、外部記憶装置504に格納されている画像処理アプリケーションを実行することによって実現される。
Next, the image data display operation of the
ここでは、画像処理アプリケーションが表示部506に提示するGUIをユーザが操作部505を通じて操作することにより、処理対象の画像データファイルを選択し、処理の実行を指示したことを制御部501が検出したことに応じて動作を開始するものとする。なお、処理対象の画像データファイルは、例えば外部記憶装置504(HDD,SSD,またはメモリカード)に格納されている画像データファイルから選択されるものとする。
Here, the
S701で制御部501は、選択された画像データファイルから、ファイル内の画像データに関するメタデータを取得する。
In S701, the
S702で制御部501は、必要に応じてS701で取得したメタデータを用い、画像データファイルから、処理を行う画像データをRAM503に読み込む。
In S<b>702 , the
S703で制御部501(画像処理手段)は、S702で読み込んだ画像データの種別を判定する。具体的には、制御部501は、画像データが2つの円周魚眼像を含んだ画像のデータであるか否かを判定する。この判定は、画像データがメッシュ形式のVR画像データであるか否かの判定に相当する。円周魚眼像を含んだ画像の場合、円周魚眼像以外の周辺領域は黒画素である。そのため、制御部501は例えば画像データの各画素の輝度値に、黒画素の輝度値に近い閾値を適用して二値化画像データを生成する。そして、制御部501(判定手段)は、二値化画像データが表す画像が、白の円形領域を2つ含んでいると判定されれば、S702で読み込んだ画像データの種別を、2つの円周魚眼像を含んだ画像のデータであると判定する。
In S703, the control unit 501 (image processing means) determines the type of the image data read in S702. Specifically, the
白領域が円形か否かは公知の任意の方法で判定することができる。例えば、白領域の外周の上の2点と交わる任意の直線を複数本引き、各直線の中点を通る垂線が1点で交わる場合には円形と判定することができる。ただし、実際には誤差が出ることを考慮し、複数の垂線の交点が一定の距離内に存在すれば円形領域と判定してもよい。 Whether or not the white area is circular can be determined by any known method. For example, if a plurality of arbitrary straight lines that intersect two points on the outer circumference of the white area are drawn, and perpendicular lines passing through the midpoints of the straight lines intersect at one point, it can be determined that the area is circular. However, considering that an error actually occurs, it may be determined that the area is a circular area if the intersection points of a plurality of perpendicular lines exist within a certain distance.
また、2つの円形領域が検出された場合、制御部501は、円形領域のサイズが同等であるか否か、円形領域間の距離が閾値未満であるか否かをさらに判定してもよい。そして、制御部501は、2つの円形領域のサイズが同等であること、および円形領域間の距離が閾値未満であることの少なくとも一方を満たす場合に、画像データが、2つの円周魚眼像を含んだVR画像データであると判定する。
Also, when two circular regions are detected, the
2つの円形領域のサイズが同等であること、円形領域間の距離が閾値未満であることは、それぞれ、画像データが2つの円周魚眼像を含んだVR画像データである可能性を高める条件である。円形領域のサイズは例えば領域内の画素数、または領域の外周上の2点を結ぶ直線の最大長であってよい。画素数もしくは最大長の差が閾値未満であれば、2つの円形領域のサイズは同等と判定することができる。また、円形領域間の距離は、2つの円形領域の外周間の最短距離であってよい。 That the two circular regions have the same size and that the distance between the circular regions is less than a threshold are conditions that increase the possibility that the image data is VR image data containing two circular fisheye images. is. The size of a circular area may be, for example, the number of pixels in the area, or the maximum length of a straight line connecting two points on the perimeter of the area. If the difference in the number of pixels or the maximum length is less than a threshold, it can be determined that the sizes of the two circular regions are the same. Also, the distance between the circular regions may be the shortest distance between the perimeters of the two circular regions.
別の方法を用いて、画像データが、2つの円周魚眼像を含んだVR画像データであると判定してもよい。例えば、制御部501は、画像を左領域と右領域に2分割するように画像データを分割する。そして、制御部501は、各領域について、閾値以上の画素で形成される部分領域を検出する。制御部501は、部分領域が円形領域であるか否かを上述した方法で判定する。右領域および左領域のそれぞれで円形領域が検出されれば、制御部501は、画像データが、2つの円周魚眼像を含んだVR画像データであると判定することができる。この場合も、2つの円形領域のサイズが同等であること、および円形領域間の距離が閾値未満であることの少なくとも一方を満たす場合に、画像データが、2つの円周魚眼像を含んだVR画像データであると判定するようにしてもよい。
Another method may be used to determine that the image data is VR image data containing two circular fisheye images. For example, the
制御部501は、処理対象の画像データが2つの円周魚眼像を含んだ画像のデータであると判定されればS704を、判定されなければS707を実行する。
The
なお、撮像部211の有効画素領域のサイズが小さい場合、図12(b)に示すように、右眼光学系301Rおよび左眼光学系301Lが形成する被写体像(円周魚眼像)1221の一部が欠けた画像1220が記録されうる。円周魚眼像の端部が欠けていても、中心部分を用いることでVR画像を表示再生できる。ただし、円周魚眼像に欠けがない場合よりもVR画像の視野角は狭くなる。
Note that when the size of the effective pixel area of the
白領域1221が画像1220の端部に達している場合、白領域1221の外周のうち、画像1220の端部1222を形成しない部分を用い、上述した方法で白領域1221が円形領域の一部であるか否かを判定することができる。すなわち、白領域1221の外周のうち、画像1220の端部1222を形成しない部分に含まれる2点と交わる任意の直線を複数本引き、各直線の中点を通る垂線が1点で交わる場合には白領域1221が円形領域の一部であると判定することができる。白領域1221が円形領域の一部であると判定されれば、画像1220は円周魚眼像の一部を含んでいると判定することができる。
When the
例えば、制御部501はS703において、画像が2つの円周魚眼像を含んでいると判定されない場合、一部が欠けた円周魚眼像を2つ含んでいるか否かをさらに判定することができる。そして、制御部501は、画像が一部が欠けた円周魚眼像を2つ含んでいると判定された場合、画像が2つの円周魚眼像を含んでいるとみなして、S704以降の処理を実行してもよい。この場合、S703は画像データが少なくとも部分的な円周魚眼像を2つ含んでいるか否かの判定、S704~S706は少なくとも部分的な円周魚眼像を対象とした処理と見なすことができる。
For example, if it is not determined in S703 that the image includes two circular fisheye images, the
S704で制御部501は、画像に含まれる2つの円周魚眼像の中心座標と半径を決定する。円の弦の垂直2等分線は円の中心を通るため、円形と判定された白領域の円周の上の2点と交わる任意の直線を2本引き、各直線の垂線2等分線の交点を白領域の中心座標とすることができる。
In S704, the
図12(a)を用いて、具体例を説明する。例えばS703で画像1200のデータから検出された2つの円形領域1201のそれぞれについて、任意の縦位置(Y座標)で水平方向に画素値を調べ、黒から白に変化した画素のX座標X1と、白から黒に変換した画素のX座標X2を求める。また、任意の横位置(X座標)で垂直方向に画素値を調べ、黒から白に変化した画素のY座標Y1と、白から黒に変換した画素のY座標Y2を求める。このとき、円形領域1201の中心座標1202(X0,Y0)は、X座標(X0)が(X1+X2)/2、Y座標(Y0)が(Y1+Y2)/2である。また、中心座標から水平方向に画素値を調べ、白から黒に変化した画素のX座標をX3とすると、円の半径は、X3-((X1+X2)/2)で求められる。中心座標は例えば画像内の一点(例えば画像中心)を原点とする画像座標として算出する。なお、図12(b)に示したような、一部が欠けた円形領域1221についても、画像の端部を形成する部分1222を除く円周上の部分を用いて同様に中心座標および半径を求めることができる。
A specific example will be described with reference to FIG. For example, for each of the two
なお、ここで説明した方法は一例であり、他の画像処理によって円周魚眼像の中心座標と半径を算出してもよい。また、誤差を考慮し、1つの円形領域について、2直線の異なる複数の組み合わせのそれぞれから得られる中心座標の平均座標を最終的な中心座標としてもよい。同様に、半径についても中心座標から複数の方向について算出した結果を平均して求めてもよい。 The method described here is only an example, and the center coordinates and radius of the circular fisheye image may be calculated by other image processing. In consideration of errors, the final center coordinates may be the average coordinates of the center coordinates obtained from a plurality of different combinations of two straight lines for one circular area. Similarly, the radius may also be obtained by averaging the results calculated in a plurality of directions from the center coordinates.
S705で制御部501(生成手段)は、S704で求めた2つの円形領域の中心座標と半径を用いて、画像データから右像および左像に相当する2つの円形領域の画像を抽出する。制御部501は、円形領域が欠けないよう、周囲の黒領域を含むように抽出してもよい。そして、制御部501は、右像および左像の配置を左右入れ替えた画像データを生成する。なお、制御部501は、配置を入れ替えた後も、S704で求めた左右の円形領域の中心座標が保持されるように抽出した円形領域の画像を配置する。例えば、画像の左側から抽出した円形領域(右像)は、その中心座標が画像の右側の円形領域(左像)について算出された中心座標と一致するように配置する。画像の左側から抽出した円形領域についても同様である。
In S705, the control unit 501 (generating means) extracts images of two circular regions corresponding to the right and left images from the image data using the center coordinates and radii of the two circular regions obtained in S704. The
あるいは、配置を入れ替えた後の画像における右眼座標および左眼座標が既知の場合、右眼座標を基準として右像の配置位置を決定し、左眼座標を基準として左像の配置位置を決定してもよい。 Alternatively, if the right-eye coordinates and left-eye coordinates of the image after the arrangement is exchanged are known, the arrangement position of the right image is determined based on the right-eye coordinates, and the arrangement position of the left image is determined based on the left-eye coordinates. You may
S706で制御部501は、S705で生成した、円周魚眼像の配置を入れ替えたVR180画像データを、表示部506に表示したり、通信部507または外部I/F508を通じて接続されたVRゴーグルなどの立体表示装置に出力したりする。なお、VR180画像データを表示する場合など、制御部501は必要に応じて円周魚眼像に正距円筒変換を適用してメッシュ形式からエクイレクタングラー形式への変換などを行ってもよい。
In S706, the
S707で制御部501は、S702で取得した画像データをそのまま表示部506に表示する。
In S707, the
図8では、S706およびS707が終了すると、表示動作を終了するように記載しているが、S701に処理を戻して、別の画像データについての処理が指示されるのを待機してもよい。また、処理対象の画像データがVR180動画データの場合には、各フレームについてS704~S706の処理を繰り返し実施する。動画データについては、先頭フレームに対するS703、S704の処理結果を2フレーム以降に流用できるため、2フレーム以降についてはS704を省略できる。 Although FIG. 8 shows that the display operation ends when S706 and S707 are finished, the process may return to S701 and wait for an instruction to process another image data. Also, when the image data to be processed is VR180 moving image data, the processing of S704 to S706 is repeatedly performed for each frame. As for the moving image data, the processing results of S703 and S704 for the first frame can be used for the second and subsequent frames, so S704 can be omitted for the second and subsequent frames.
なお、S704~S706の任意のタイミングで、右像と左像の配置を入れ替えるか否かをユーザに指定させるようにしてもよい。配置を入れ替えないように指定された場合、制御部501はS702で取得した画像データをそのまま表示する。なお、S703で画像が2つの円周魚眼像を含まないと判定された場合、一部が欠けた円周魚眼像を2つ含んでいるか否かを判定してもよい。そして、画像が一部が欠けた円周魚眼像を2つ含んでいると判定された場合は、一部が欠けた円周魚眼像に対してS704以降の処理を適用してもよい。
It should be noted that the user may specify whether or not to exchange the positions of the right image and the left image at an arbitrary timing of S704 to S706. If it is specified not to change the arrangement, the
また、処理対象の画像データがVR180画像データか否かの情報がメタデータに含まれていない場合でも、一般的な撮影情報として、レンズユニットの機種名がメタデータに含まれる場合がある。この場合、S701においてレンズユニットの機種名を読み込み、予め登録されているVR180レンズの機種名リストを参照することにより、画像データの種別の判定、すなわち、VR180レンズを用いて撮影された画像データか否かの判定が可能である。この場合、S703の判定は画像処理を行わず実施できる。制御部501は、VR180レンズを用いて撮影された画像データであればS704を、他のレンズを用いて撮影された画像データであればS707を実行すればよい。
Even if the metadata does not include information about whether the image data to be processed is VR180 image data, the metadata may include the model name of the lens unit as general shooting information. In this case, in step S701, the model name of the lens unit is read, and the model name list of the VR180 lens registered in advance is referenced to determine the type of image data. It is possible to determine whether or not In this case, the determination in S703 can be performed without image processing. The
また、制御部501は、右像および左像の配置を入れ替えた画像データおよび、右像および左像の配置を入れ替え、さらに右像および左像に正距円筒変換を適用した画像データの少なくとも一方を別画像ファイルとして外部記憶装置504に保存してもよい。これらの画像データは、VRゴーグルなどの一般的なVR180対応機器でそのまま取り扱うことができる。
In addition, the
これらの画像データを別途保存する場合、画像データファイルに記録するメタデータとして、画像データがVR180画像データであること、右像と左像の配置が入れ替え済であること、正距円筒変換済みであることの1つ以上を示す情報を記録することができる。これにより、画像データを用いるVRシステムにおける処理を簡略化できる。 When these image data are saved separately, the metadata recorded in the image data file is that the image data is VR180 image data, that the positions of the right and left images have been switched, and that the equirectangular conversion has been completed. Information indicating one or more things can be recorded. This simplifies processing in a VR system that uses image data.
本実施形態では、カメラ100が2眼レンズユニット300から、2眼レンズユニット300がVR180レンズであることを示す情報を取得できないことを前提とした。カメラ100が2眼レンズユニット300から取得可能な情報に基づいて2眼レンズユニット300がVR180レンズであると判定できる場合、VR180画像データであることを示す情報をメタデータとして画像データファイルに記録することができる。これにより、PC500はS703の判定を画像処理を行わず実施できる。制御部501は、VR180レンズを用いて撮影された画像データであればS704を、他のレンズを用いて撮影された画像データであればS707を実行すればよい。
In this embodiment, it is assumed that the
さらに、2眼レンズユニット300が形成する円周魚眼像(右像および左像)の中心座標や半径を2眼レンズユニット300から取得できる場合、これらの情報もメタデータとして画像データファイルに記録することができる。制御部501は、S701で取得したメタデータに円周魚眼像(右像および左像)の中心座標や半径の情報が含まれている場合、S703,S704の処理をスキップすることができる。そのため、制御部501は、S703を実行する前のタイミングで、S701で取得したメタデータに円周魚眼像(右像および左像)の中心座標や半径の情報が含まれているか否かを判定してもよい。そして、制御部501は、円周魚眼像(右像および左像)の中心座標や半径の情報が含まれていないと判定される場合にS703を実行し、含まれていると判定されればS705を実行する。
Furthermore, if the center coordinates and radius of the circular fisheye images (right and left images) formed by the twin-
以上説明したように、本実施形態によれば、画像データが2つの円周魚眼像を含んだ画像のデータであると判定される場合に、画像データの種別をVR180画像データであると判定するようにした。そのため、画像データのメタデータからはVR180画像データであるか否か判定できない場合であっても、画像の種別を正しく認識し、VR180画像データを適切に処理することが可能になる。したがって、カメラが装着されたレンズユニットがVR180レンズであることを認識できない場合であっても、カメラが記録した画像データの種別を正しく認識し、適切に取り扱うことができる。 As described above, according to the present embodiment, when image data is determined to be image data including two circular fisheye images, the type of image data is determined to be VR180 image data. I made it Therefore, even if it is not possible to determine whether the image data is VR180 image data from the metadata of the image data, it is possible to correctly recognize the image type and appropriately process the VR180 image data. Therefore, even if it is not possible to recognize that the lens unit attached to the camera is a VR180 lens, the type of image data recorded by the camera can be correctly recognized and handled appropriately.
●(第2実施形態)
次に、本発明の第2実施形態について説明する。第2実施形態は、2眼レンズユニット300を装着したカメラ100からPC500に、撮像素子から読み出した画像信号を映像信号としてリアルタイムに送信する形態に関する。以下の説明において、第1実施形態と共通する構成については第1実施形態と同じ参照符号を用いることにより、説明を省略する。
● (Second embodiment)
Next, a second embodiment of the invention will be described. The second embodiment relates to an embodiment in which an image signal read out from an imaging device is transmitted in real time as a video signal from a
図9は、第2実施形態に係る画像処理システムの模式図である。本実施形態の画像処理システムは、カメラ100とPC500とがケーブル190で接続され、カメラ100の撮像部211(撮像素子)から読みされた画像信号がリアルタイムでPC500に送信される構成を有する。ケーブル190は例えばカメラ100の映像信号出力I/F240とPC500の外部I/F508とを接続する。ここでは一例として画像信号をHDMI規格に準拠した伝送方法でカメラ100からPC500に送信するものとする。したがって、映像信号出力I/F240および外部I/F508はHDMI規格に準拠したインタフェースであり、ケーブル190はHDMIケーブルである。しかし、DVI(Diginal Visual Interface)、SDI、USB Video Classなどの他の規格に従って映像信号を送信してもよい。
FIG. 9 is a schematic diagram of an image processing system according to the second embodiment. The image processing system of this embodiment has a configuration in which a
PC500は外部I/F508を介して受信した映像信号を表示部506にリアルタイム表示することができる。また、PC500は、受信した映像信号をストリーミング可能な形式に変換し、PC500に接続されたHMD191に送信したり、クラウドサービス192を介して複数のユーザ193に対して配信したりすることができる。
The
次に、本実施形態におけるカメラ100の映像出力動作について図10のフローチャートを用いて説明する。図10において、第1実施形態で説明した撮影処理と同様の処理を行う工程については図7と同じ参照符号を付して説明を省略する。映像出力動作は、システム制御部50がプログラムを実行して必要な制御を実行することによって実現される。図10に示す撮影動作は、例えば電源スイッチ102を操作することにより、ユーザがカメラ100の電源をオンにした際に開始される。システム制御部50は、電源オンに伴う起動処理を実行した後、カメラ100を撮影スタンバイ状態とする。
Next, the video output operation of the
撮影スタンバイ状態においてカメラ100は動画撮影を継続して行い、EVF217または表示部108にライブビュー表示を行うものとする(S601~S602)。
S903でシステム制御部50は、映像信号出力I/F240にケーブル190が接続されたか否かを、信号線の電圧に基づいて判定する。システム制御部50は、ケーブル190が接続されたと判定された場合はS604を、判定されない場合はS601を実行する。
In the shooting standby state, the
In S903, the
S604でシステム制御部50は、1フレーム分の画像信号を読み出し、画像処理部214に表示用画像データを生成させる。また、S605でシステム制御部50は、メタデータとしてPC500に送信する情報を取得する。本実施形態でもシステム制御部50は2眼レンズユニット300がVR180レンズであることを判定可能な情報を2眼レンズユニット300から取得できないものとする。
In S604, the
S906でシステム制御部50は、カメラ100におけるライブビュー表示のための動作と並行して、例えばメモリ215の一部領域として用意したHDMI信号出力用のバッファに画像データとメタデータを所定の形式で格納する。
In S906, in parallel with the operation for live view display in the
S907でシステム制御部50は、バッファに格納された画像データとメタデータとを、映像信号出力I/F240を通じてHDMI信号として出力する。データをHDMI信号(TMDSシーケンス)に変換するためのエンコード処理などの詳細については説明を省略する。
In S<b>907 , the
S908でシステム制御部50は、映像信号出力I/F240からケーブル190が抜かれたか否か、信号線の電圧に基づいて判定する。ケーブル190が抜かれたと判定された場合は映像出力動作を終了する。システム制御部50は、ケーブル190が抜かれたと判定されない場合はS604からの処理を繰り返す。これにより、ライブビュー画像がPC500の表示部506に継続して表示される。
In S908, the
本実施形態では、カメラ100にはVR180レンズである2眼レンズユニット300が装着されている。そのため、PC500には、2つの円周魚眼像を含んだVR180画像であって、右像と左像との位置が逆転した画像(図5の撮像画像402bに相当)の映像信号がPC500に出力される。なお、PC500に出力される画像データの信号形式は、RGB形式、YCbCr形式、RAW形式のいずれでもよい。RAW形式の場合にはS906で表示用画像データではなくRAWデータをバッファに格納する。なお、画像処理部214が生成する表示用画像データはカメラ100の表示デバイスの解像度に合わせた解像度を有する。PC500に送信するための画像データは、PC500の表示解像度を考慮した解像度としてもよい。
In this embodiment, the
次に、PC500の映像表示動作について、図11のフローチャートを用いて説明する。以下の動作は、PC500において、制御部501が、外部記憶装置504に格納されている画像処理アプリケーションを実行することによって実現される。図11において、第1実施形態で説明した画像データ表示動作と同様の処理を行う工程については図8と同じ参照符号を付して説明を省略する。ここでは、外部I/F508とカメラ100の映像信号出力I/F240とがケーブル190で接続され、PC500がカメラ100から映像信号を受信可能な状態であるものとする。
Next, the video display operation of the
S1001で制御部501は、外部I/F508を通じて映像信号を受信したか否かを判定する。制御部501は、映像信号を受信したと判定された場合はS1002を実行し、判定されない場合はS1001を実行する。
In S<b>1001 , the
S1002で制御部501は、外部I/F508を通じた映像信号の受信が停止したか否かを判定する。制御部501は、映像信号の受信が停止した判定された場合は映像表示動作を終了し、判定されない場合はS1003を実行する。
In S1002, the
S1003で制御部501は、受信した映像信号をデコードしてメタデータを取得する。
S1004で制御部501は、受信した映像信号をデコードして画像データを取得する。
以降、制御部501は、第1実施形態で説明したS703以降の処理を実行する。
In S1003, the
In S1004, the
Thereafter, the
なお、S704~S706の任意のタイミングで、右像と左像の配置を入れ替えるか否かをユーザに指定させるようにしてもよい。配置を入れ替えないように指定された場合、制御部501はS1004で取得した画像データをそのまま表示する。
It should be noted that the user may specify whether or not to exchange the positions of the right image and the left image at an arbitrary timing of S704 to S706. If it is specified not to change the arrangement, the
また、S706において、右像および左像の配置を入れ替えた画像データの右像および左像に正距円筒変換を適用してメッシュ形式からエクイレクタングラー形式へ変換してから表示を行ってもよい。メッシュ形式とエクイレクタングラー形式のいずれを表示するかは、ユーザが指定できるようにしてもよい。 Further, in S706, equirectangular transformation may be applied to the right and left images of the image data in which the positions of the right and left images are interchanged to convert from the mesh format to the equirectangular format before displaying. . The user may be allowed to specify whether to display the mesh format or the equirectangular format.
また、処理対象の画像データがVR180画像データか否かの情報がメタデータに含まれていない場合でも、一般的な撮影情報として、レンズユニットの機種名がメタデータに含まれる場合がある。この場合、S1003においてレンズユニットの機種名を読み込み、予め登録されているVR180レンズの機種名リストを参照することにより、処理対象の画像データの種別判定(VR180レンズを用いて撮影された画像データか否かの判定)が可能である。この場合、S703の判定は画像処理を行わず実施できる。制御部501は、VR180レンズを用いて撮影された画像データであればS704を、他のレンズを用いて撮影された画像データであればS707を実行すればよい。
Even if the metadata does not include information about whether the image data to be processed is VR180 image data, the metadata may include the model name of the lens unit as general shooting information. In this case, in step S1003, the model name of the lens unit is read, and the model name list of the VR180 lens registered in advance is referenced to determine the type of image data to be processed (whether it is image data captured using the VR180 lens). or not) is possible. In this case, the determination in S703 can be performed without image processing. The
また、本実施形態でPC500が受信する映像信号は動画データに相当するため、先頭フレームに対するS703、S704の処理結果を2フレーム以降に流用できる。したがって、2フレーム以降についてはS704を省略できる。
In addition, since the video signal received by the
また、右像および左像の配置を入れ替えた画像データの右像および左像に正距円筒変換を適用してメッシュ形式からエクイレクタングラー形式へ変換した画像データをストリーミング可能な形式に変換し、外部に供給してもよい。例えば、制御部501は、ストリーミング可能な形式の画像データをPC500に接続されたHMDに送信したり、通信部507または外部I/F508を介して配信サーバに送信することができる。これにより、カメラ100のライブビュー画像を外部装置に供給したり、遠隔地のユーザに配信したりすることができる。
In addition, applying equirectangular transformation to the right and left images of the image data in which the positions of the right and left images are exchanged, converting the image data converted from the mesh format to the equirectangular format into a format that can be streamed, It may be supplied externally. For example, the
また、PC500が受信した映像信号をそのままストリーミング可能な形式に変換し、S703~S706に対応する処理を、外部装置(配信サーバやHMDなど)で実施してもよい。
Also, the video signal received by the
本実施形態では、カメラ100が2眼レンズユニット300から、2眼レンズユニット300がVR180レンズであることを示す情報を取得できないことを前提とした。しかしながら、カメラ100が2眼レンズユニット300から取得可能な情報に基づいて2眼レンズユニット300がVR180レンズであると判定できる場合、VR180画像データであることを示す情報をメタデータとして映像信号に含めることができる。これにより、PC500はS703の判定を画像処理を行わず実施できる。制御部501は、VR180レンズを用いて撮影された画像データであればS704を、他のレンズを用いて撮影された画像データであればS707を実行すればよい。
In this embodiment, it is assumed that the
さらに、2眼レンズユニット300が形成する円周魚眼像(右像および左像)の中心座標や半径を2眼レンズユニット300から取得できる場合、これらの情報もメタデータとして画像データファイルに記録することができる。制御部501は、S1003で取得したメタデータに円周魚眼像(右像および左像)の中心座標や半径の情報が含まれている場合、S703,S704の処理をスキップすることができる。そのため、制御部501は、S703を実行する前のタイミングで、S1003で取得したメタデータに円周魚眼像(右像および左像)の中心座標や半径の情報が含まれているか否かを判定してもよい。そして、制御部501は、円周魚眼像(右像および左像)の中心座標や半径の情報が含まれていないと判定される場合にS703を実行し、含まれていると判定されればS705を実行する。
Furthermore, if the center coordinates and radius of the circular fisheye images (right and left images) formed by the twin-
以上説明したように、本実施形態によれば、カメラからリアルタイムで送信される映像信号で伝送される画像データが2つの円形領域を含んだ画像のデータであると判定される場合に、画像データの種別をVR180画像データであると判定するようにした。そのため、画像データのメタデータからはVR180画像データであるか否か判定できない場合であっても、VR180画像データを適切に処理することが可能になる。したがって、カメラが装着されたレンズユニットがVR180レンズであることを認識できない場合であっても、カメラから受信した画像の種別を正しく認識し、適切に取り扱うことができる。 As described above, according to the present embodiment, when it is determined that the image data transmitted by the video signal transmitted in real time from the camera is image data including two circular areas, the image data is determined to be VR180 image data. Therefore, even if it is not possible to determine whether the image data is VR180 image data from the metadata of the image data, it is possible to appropriately process the VR180 image data. Therefore, even if it is not possible to recognize that the lens unit attached to the camera is a VR180 lens, it is possible to correctly recognize the type of image received from the camera and handle it appropriately.
(その他の実施形態)
第1実施形態において図8のフローチャートを用いて説明した動作は、PC500で実行することが必須ではなく、カメラ100が実行してもよい。すなわち、第1実施形態に係る画像処理装置はカメラ100であってもよい。
(Other embodiments)
The operations described using the flowchart of FIG. 8 in the first embodiment need not be executed by the
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。 The present invention supplies a program that implements one or more functions of the above-described embodiments to a system or device via a network or a storage medium, and one or more processors in the computer of the system or device reads and executes the program. It can also be realized by processing to It can also be implemented by a circuit (for example, ASIC) that implements one or more functions.
本発明は上述した実施形態の内容に制限されず、発明の精神および範囲から離脱することなく様々な変更及び変形が可能である。したがって、発明の範囲を公にするために請求項を添付する。 The present invention is not limited to the content of the above-described embodiments, and various modifications and variations are possible without departing from the spirit and scope of the invention. Accordingly, the claims are appended to make public the scope of the invention.
100…カメラ、102…PC、501…制御部、502…ROM、503…RAM、504…外部記憶装置、505…操作部、506…表示部、507…通信部、508…外部I/F、509…システムバス
DESCRIPTION OF
Claims (16)
前記画像データが表す画像が、2つの円形領域を含んでいるか否かを判定する判定手段と、
前記判定手段により、前記画像が2つの円形領域を含んでいると判定された場合、前記画像に対して所定の処理を実行する処理手段と、
を有することを特徴とする画像処理装置。 acquisition means for acquiring image data;
determining means for determining whether an image represented by the image data includes two circular regions;
a processing means for performing a predetermined process on the image when the determination means determines that the image includes two circular regions;
An image processing device comprising:
前記メタデータに基づいて前記画像データが所定の種別である場合には、前記判定手段による判定を行わないことを特徴とする請求項1から8のいずれか1項に記載の画像処理装置。 the acquisition means further acquires metadata of the image data;
9. The image processing apparatus according to any one of claims 1 to 8, wherein when said image data is of a predetermined type based on said metadata, said determination means does not perform determination.
画像データを取得する工程と、
前記画像データが表す画像が、2つの円形領域を含んでいるか否かを判定する工程と、
前記画像が2つの円形領域を含んでいると判定された場合、前記画像に対して所定の処理を実行する工程と、
を有することを特徴とする画像処理方法。 An image processing method executed by an image processing device,
obtaining image data;
determining whether the image represented by the image data includes two circular regions;
if the image is determined to contain two circular regions, performing a predetermined process on the image;
An image processing method characterized by comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/837,157 US20220400243A1 (en) | 2021-06-15 | 2022-06-10 | Image processing apparatus and image processing method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021099615 | 2021-06-15 | ||
| JP2021099615 | 2021-06-15 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022191143A true JP2022191143A (en) | 2022-12-27 |
Family
ID=84612821
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022036409A Pending JP2022191143A (en) | 2021-06-15 | 2022-03-09 | Image processing device and image processing method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2022191143A (en) |
-
2022
- 2022-03-09 JP JP2022036409A patent/JP2022191143A/en active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110691187B (en) | Electronic device, control method of electronic device, and computer-readable medium | |
| US20220400243A1 (en) | Image processing apparatus and image processing method | |
| JP7183033B2 (en) | ELECTRONIC DEVICE, ELECTRONIC DEVICE CONTROL METHOD, PROGRAM, AND STORAGE MEDIUM | |
| CN110881097B (en) | Display control apparatus, control method, and computer-readable medium | |
| US11849100B2 (en) | Information processing apparatus, control method, and non-transitory computer readable medium | |
| JP2022191143A (en) | Image processing device and image processing method | |
| JP2021069045A (en) | Display control device, display control method, program, and storage media | |
| US20220385829A1 (en) | Information processing apparatus, control method, and storage medium | |
| US20220398688A1 (en) | Image processing apparatus, image processing method, and storage medium | |
| US20220385830A1 (en) | Electronic apparatus, control method, and non-transitory computer readable medium | |
| US20220385883A1 (en) | Image processing apparatus, image processing method, and storage medium | |
| JP2023184106A (en) | Display control device, display control method, program, and storage medium | |
| US11843894B2 (en) | Electronic apparatus, method of controlling the same, and storage medium | |
| US20230281768A1 (en) | Electronic apparatus, control method of electronic apparatus, and non-transitory computer readable medium | |
| US20240020073A1 (en) | Information processing apparatus, information processing method, and non-transitory computer readable medium | |
| US20230209177A1 (en) | Imaging apparatus | |
| US20230384236A1 (en) | Information processing apparatus, imaging apparatus, information processing method, and non-transitory computer readable medium | |
| JP2021158559A (en) | Electronic device, control method of the same, and program | |
| US20240073511A1 (en) | Electronic apparatus, control method for electronic apparatus and storage medium | |
| JP2022184712A (en) | Information processing apparatus, imaging apparatus, control method, program and storage medium | |
| JP2024030580A (en) | Electronic equipment and control methods for electronic equipment | |
| JP2023142979A (en) | Electronic device, control method for electronic device, program, and storage medium | |
| JP2023102947A (en) | Information processing device, control method thereof, and program | |
| JP2023181634A (en) | Electronic apparatus, method for controlling electronic apparatus, and program | |
| JP2022189536A (en) | Imaging apparatus and method |