JP2021084192A - robot - Google Patents
robot Download PDFInfo
- Publication number
- JP2021084192A JP2021084192A JP2019215801A JP2019215801A JP2021084192A JP 2021084192 A JP2021084192 A JP 2021084192A JP 2019215801 A JP2019215801 A JP 2019215801A JP 2019215801 A JP2019215801 A JP 2019215801A JP 2021084192 A JP2021084192 A JP 2021084192A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- arm
- mounting
- mounting portion
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Abstract
Description
本発明は、ロボットに関するものである。 The present invention relates to a robot.
近年、工場では人件費の高騰や人材不足により、各種ロボットやそのロボット周辺機器によって、人手で行われてきた作業の自動化が加速している。例えば、特許文献1に記載されているロボットは、ロボットアームと、ロボットアームの先端部に設けられた吸着ノズルと、ロボットアームの先端部に設置されたカメラと、を有する。ロボットは、カメラが撮像した画像に基づいてロボットアームの作動を制御し、各種作業を行う。 In recent years, due to soaring labor costs and a shortage of human resources in factories, automation of manual work has been accelerated by various robots and their peripheral devices. For example, the robot described in Patent Document 1 has a robot arm, a suction nozzle provided at the tip of the robot arm, and a camera installed at the tip of the robot arm. The robot controls the operation of the robot arm based on the image captured by the camera and performs various operations.
また、特許文献1に記載されているロボットでは、ロボットアームの先端部に設置された板金にカメラが固定されている。 Further, in the robot described in Patent Document 1, the camera is fixed to a sheet metal installed at the tip of the robot arm.
しかしながら、特許文献1に記載されているロボットでは、カメラを設置可能な位置は、一か所であり、カメラを設置する位置を選択することができない。このため、ロボットアームの動作内容によっては、カメラがロボットアームやロボットの周辺機器に接触してしまうおそれがある。 However, in the robot described in Patent Document 1, the position where the camera can be installed is one, and the position where the camera is installed cannot be selected. Therefore, depending on the operation content of the robot arm, the camera may come into contact with the robot arm or the peripheral device of the robot.
本発明は、前述した課題の少なくとも一部を解決するためになされたものであり、以下により実現することが可能である。 The present invention has been made to solve at least a part of the above-mentioned problems, and can be realized by the following.
本適用例のロボットは、基台と、
前記基台に接続され、第1軸回りに回動する第1アームと、
前記第1アームに接続され、前記第1軸と交わる方向に延在するベースと、開口を有し、前記ベースを覆うカバー部材と、を有し、前記第1軸と平行な第2軸回りに回動する第2アームと、
前記第2アームに接続され、前記第1軸と平行な第3軸回りに回動し、かつ、前記第3軸に沿って移動する第3アームと、
互いに異なる位置に設置され、撮像部が着脱可能に装着される第1装着部および第2装着部を有する装着用部材と、を備え、
前記装着用部材は、前記第1装着部および前記第2装着部が前記カバー部材の外側に位置するように前記開口を通って前記ベースに固定されることを特徴とする。
The robot in this application example is a base and
A first arm connected to the base and rotating around the first axis,
Around a second axis that is connected to the first arm and extends in a direction intersecting the first axis, has an opening, and has a cover member that covers the base, and is parallel to the first axis. The second arm that rotates to
A third arm connected to the second arm, rotating around a third axis parallel to the first axis, and moving along the third axis.
A mounting member having a first mounting portion and a second mounting portion, which are installed at different positions from each other and to which the imaging unit is detachably mounted, is provided.
The mounting member is characterized in that the first mounting portion and the second mounting portion are fixed to the base through the opening so as to be located outside the cover member.
以下、本発明のロボットを添付図面に示す好適な実施形態に基づいて詳細に説明する。
<第1実施形態>
図1は、本発明のロボットの第1実施形態を示す側面図である。図2は、図1に示すロボットシステムのブロック図である。図3は、図1に示すロボットの第2アームの内部を示す側面図である。図4は、図1に示すロボットの第2アームの斜視図である。図5は、図1に示すロボットの第2アームの斜視図である。図6は、図1に示すロボットが備える装着用部材の斜視図である。図7は、図6に示す装着用部材の装着部の縦断面図である。
Hereinafter, the robot of the present invention will be described in detail based on the preferred embodiments shown in the accompanying drawings.
<First Embodiment>
FIG. 1 is a side view showing a first embodiment of the robot of the present invention. FIG. 2 is a block diagram of the robot system shown in FIG. FIG. 3 is a side view showing the inside of the second arm of the robot shown in FIG. FIG. 4 is a perspective view of the second arm of the robot shown in FIG. FIG. 5 is a perspective view of the second arm of the robot shown in FIG. FIG. 6 is a perspective view of a mounting member included in the robot shown in FIG. FIG. 7 is a vertical cross-sectional view of the mounting portion of the mounting member shown in FIG.
また、図1〜図4では、説明の便宜上、互いに直交する3軸として、x軸、y軸およびz軸を図示している。また、以下では、x軸に平行な方向を「x軸方向」とも言い、y軸に平行な方向を「y軸方向」とも言い、z軸に平行な方向を「z軸方向」とも言う。また、以下では、図示された各矢印の先端側を「+(プラス)」、基端側を「−(マイナス)」と言う。また、z軸回りの方向およびz軸に平行な軸回りの方向を「u軸方向」とも言う。 Further, in FIGS. 1 to 4, for convenience of explanation, the x-axis, the y-axis, and the z-axis are illustrated as three axes orthogonal to each other. Further, in the following, the direction parallel to the x-axis is also referred to as "x-axis direction", the direction parallel to the y-axis is also referred to as "y-axis direction", and the direction parallel to the z-axis is also referred to as "z-axis direction". Further, in the following, the tip end side of each of the illustrated arrows will be referred to as “+ (plus)”, and the proximal end side will be referred to as “− (minus)”. Further, the direction around the z-axis and the direction around the axis parallel to the z-axis are also referred to as "u-axis directions".
また、以下では、説明の便宜上、図1中の+z軸方向、すなわち、上側を「上」、−z軸方向、すなわち、下側を「下」とも言う。また、ロボットアーム20については、図1中の基台21側を「基端」、その反対側、すなわち、エンドエフェクター7側を「先端」と言う。また、図1中のz軸方向、すなわち、上下方向を「鉛直方向」とし、x軸方向およびy軸方向、すなわち、左右方向を「水平方向」とする。
Further, in the following, for convenience of explanation, the + z-axis direction in FIG. 1, that is, the upper side is referred to as “upper”, and the −z-axis direction, that is, the lower side is also referred to as “lower”. Regarding the
図1および図2に示すロボットシステム100は、例えば、電子部品および電子機器等のワークの保持、搬送、組立ておよび検査等の作業で用いられる装置である。ロボットシステム100は、ロボット2と、エンドエフェクター7と、制御装置8と、を備えている。
The
また、図示の構成では、制御装置8は、ロボット2の基台21に内蔵されているが、これに限定されず、例えば、基台21の外側に配置されていてもよい。この場合、ロボット2と制御装置8とは、有線通信で接続されていてもよく、また、無線通信で接続されていてもよい。
Further, in the illustrated configuration, the control device 8 is built in the
ロボット2は、水平多関節ロボット、すなわち、スカラロボットである。
図1〜図4に示すように、ロボット2は、基台21と、第1アーム22と、第2アーム23と、作業ヘッドである第3アーム24と、力検出部5と、を備えている。第1アーム22、第2アーム23および第3アーム24等によりロボットアーム20が構成される。
The
As shown in FIGS. 1 to 4, the
また、ロボット2は、第1アーム22を基台21に対して回転させる駆動ユニット25と、第2アーム23を第1アーム22に対して回転させる駆動ユニット26と、第3アーム24のシャフト241を第2アーム23に対して回転させるu駆動ユニット27と、シャフト241を第2アーム23に対してz軸方向に移動させるz駆動ユニット28と、角速度センサー29とを備えている。
Further, the
図1および図2に示すように、駆動ユニット25は、第1アーム22の筐体220内に内蔵されており、駆動力を発生するモーター251と、モーター251の駆動力を減速する減速機252と、モーター251または減速機252の回転軸の回転角度を検出する位置センサー253とを有している。
As shown in FIGS. 1 and 2, the
駆動ユニット26は、第2アーム23に内蔵されており、駆動力を発生するモーター261と、モーター261の駆動力を減速する減速機262と、モーター261または減速機262の回転軸の回転角度を検出する位置センサー263とを有している。
The
u駆動ユニット27は、第2アーム23に内蔵されており、駆動力を発生するモーター271と、モーター271の駆動力を減速する減速機272と、モーター271または減速機272の回転軸の回転角度を検出する位置センサー273とを有している。
The
z駆動ユニット28は、第2アーム23に内蔵されており、駆動力を発生するモーター281と、モーター281の駆動力を減速する減速機282と、モーター281または減速機282の回転軸の回転角度を検出する位置センサー283とを有している。
The
モーター251、モーター261、モーター271およびモーター281としては、例えば、ACサーボモーター、DCサーボモーター等のサーボモーターを用いることができる。
As the
また、減速機252、減速機262、減速機272および減速機282としては、例えば、遊星ギア型の減速機、波動歯車装置等を用いることができる。また、位置センサー253、位置センサー263、位置センサー273および位置センサー283は、例えば、角度センサーとすることができる。
Further, as the speed reducer 252, the speed reducer 262, the speed reducer 272, and the speed reducer 282, for example, a planetary gear type speed reducer, a wave gear device, or the like can be used. Further, the
駆動ユニット25、駆動ユニット26、u駆動ユニット27およびz駆動ユニット28は、それぞれ、対応する図示しないモータードライバーに接続されており、モータードライバーを介して制御装置8により制御される。なお、各減速機は省略されていてもよい。
The
また、角速度センサー29は、第2アーム23に内蔵されている。このため、第2アーム23の角速度を検出することができる。この検出した角速度の情報に基づいて、制御装置8は、ロボット2の制御を行う。また、角速度センサー29は、駆動ユニット26〜28よりも−y軸側、すなわち、基台21の遠位側に設置されている。
Further, the
基台21は、例えば、図示しない床面にボルト等によって固定されている。基台21の上端部には第1アーム22が連結されている。第1アーム22は、基台21に対して鉛直方向に沿う第1軸O1回りに回転可能となっている。第1アーム22を回転させる駆動ユニット25が駆動すると、第1アーム22が基台21に対して第1軸O1回りに水平面内で回転する。また、位置センサー253により、基台21に対する第1アーム22の回転量が検出できるようになっている。
The
また、第1アーム22の先端部には、第2アーム23が連結されている。第2アーム23は、第1アーム22に対して鉛直方向に沿う第2軸O2回りに回転可能となっている。第1軸O1の軸方向と第2軸O2の軸方向とは同一である。すなわち、第2軸O2は、第1軸O1と平行である。第2アーム23を回転させる駆動ユニット26が駆動すると、第2アーム23が第1アーム22に対して第2軸O2回りに水平面内で回転する。また、位置センサー263により、第1アーム22に対する第2アーム23の駆動、具体的には、回転量が検出できるようになっている。
A
また、第2アーム23の可動範囲、すなわち、回転可能な範囲は、後述する装着用部材9に装着された保護部材93が図1に示す配管800および配管支持部900と接触しない程度であるのが好ましい。なお、配管800および配管支持部900は、中空であり、後述する配線群300を含む複数の配線を挿通する部分である。
Further, the movable range of the
図3に示すように、第2アーム23は、ベース231と、ベース231に支持される駆動ユニット26、u駆動ユニット27、z駆動ユニット28および角速度センサー29と、これらを覆うカバー部材232と、を有する。また、駆動ユニット26、u駆動ユニット27、z駆動ユニット28および角速度センサー29は、−y軸側からこの順で並んで設置される。
As shown in FIG. 3, the
ベース231は、例えば、各種金属材料、各種硬質樹脂材料等で構成された剛体である。ベース231は、第3軸O3と交わる方向、すなわち、y軸方向に延在している。また、ベース231は、u駆動ユニット27が配置される凹部230Cを有している。凹部230Cは、−z軸側の一部が−z軸側に開放しており、この解放した部分に回転支持部材242が埋設され、シャフト241が挿通されている。
The
図3に示すように、u駆動ユニット27は、前述したモーター271、減速機272および位置センサー273に加え、プーリー275を有する。これらは、位置センサー273、モーター271、減速機272およびプーリー275の順で+z軸側から配置され、凹部230Cの底部に固定されている。プーリー275は、減速機272のコアに固定されており、モーター271の回転力が減速機272で減速されて、プーリー275に伝達される。
As shown in FIG. 3, the
また、プーリー275は、ベルト274によってシャフト241に設けられたスプラインナット244の内輪244Aと連結されている。ベルト274は、プーリー275および内輪244Aに掛け回された無端ベルトであり、その内側、すなわち、プーリー275および内輪244A側に図示しない歯を有する。ベルト274の歯が、プーリー275および内輪244Aの露出した部分の図示しない歯とそれぞれ噛合している。
Further, the
このようなu駆動ユニット27では、モーター271の回転力が減速機272およびプーリー275を介してベルト274に伝達され、ベルト274が回転する。このベルト274の回転により、その回転力がスプラインナット244を介してシャフト241に伝達される。この回転力が内輪244Aの内周部およびシャフト241の図示しないスプライン溝を介してシャフト241に伝達され、シャフト241がu軸方向に移動する、すなわち、回転することができる。
In such
図3に示すように、z駆動ユニット28は、前述したモーター281、減速機282および位置センサー283に加え、プーリー285を有する。これらは、位置センサー283、モーター281、プーリー285および減速機282の順で+z軸側から配置されている。プーリー285は、減速機282のコアに固定されており、モーター281の回転力が減速機282で減速されて、プーリー285に伝達される。また、減速機282が、ベース231に固定されている。
As shown in FIG. 3, the
また、プーリー285は、ベルト284によってシャフト241に設けられたボールねじナット243の内輪243Aの露出した部分と連結されている。ベルト284は、プーリー285および内輪243Aに掛け回された無端ベルトであり、その内側、すなわち、プーリー285および内輪243A側に図示しない歯を有する。ベルト284の歯が、プーリー285および内輪243Aの図示しない歯とそれぞれ噛合している。
Further, the
このようなz駆動ユニット28では、モーター281の回転力が減速機282およびプーリー285を介してベルト284に伝達され、ベルト284が回転する。このベルト284の回転により、その回転力がボールねじナット243の内輪243Aを介してシャフト241に伝達される。この回転力が内輪243Aの内周部およびシャフト241のボールねじ溝によって方向が変換され、シャフト241がz軸方向に移動する、すなわち、上下動することができる。
In such
図1および図3に示すように、カバー部材232は、ベース231、駆動ユニット26、u駆動ユニット27、z駆動ユニット28および角速度センサー29等を覆い、これらを保護する機能を有する。また、カバー部材232は、ベース231よりも軟質な材料で構成されている。この材料としては、例えば、各種樹脂材料が挙げられる。
As shown in FIGS. 1 and 3, the
このように、カバー部材232は、ベース231よりも軟質である。これにより、ベース231が露出する構成に比べ、安全性を高めることができる。
As described above, the
また、カバー部材232は、−z軸側の壁部に開口233を有する。この開口233は、貫通孔であり、ベース231の延在方向、すなわち、y軸方向に沿って延在する長孔で構成されている。開口233は、後述する装着用部材9が通過する部分であるとともに、第3アーム24のシャフト241を挿通する部分である。
Further, the
このように、第3アーム24は、開口233を通る。これにより、後述する装着用部材9をベース231に固定するための機能と、第3アーム24を挿通するための機能とを備えることとなる。よって、これらを別途設ける構成に比べ、簡素な構成とすることができる。
In this way, the
また、図4および図5に示すように、開口233の第3アーム24を挿通する部分以外は、カバー部材234により覆われている。これにより、防水性を高めることができる。なお、図3では、カバー部材234を省略している。
Further, as shown in FIGS. 4 and 5, the portion of the
また、図1に示すように、カバー部材232の+y軸側の外面には、受付部4が設けられている。受付部4は、図示しない複数のボタン等を有し、オペレーターからの入力を受け付ける機能を有している。また、複数のボタンには、ロボットアーム20の動作を教示する教示ボタンが含まれる。なお、例えばタッチパネルを用いる場合には、受付部4は、ユーザーの指のタッチパネルへの接触等を検知する入力検知部としての機能を有する。
Further, as shown in FIG. 1, a reception portion 4 is provided on the outer surface of the
また、図3に示すように、第2アーム23の先端部には、第3アーム24が設置されている。第3アーム24は、シャフト241と、シャフト241を回転可能に支持する回転支持部材242とを有する。
Further, as shown in FIG. 3, a
シャフト241は、第2アーム23に対して、鉛直方向に沿う第3軸O3回りに回転可能であり、かつ、上下方向に移動可能、すなわち、昇降可能となっている。このシャフト241は、ロボットアーム20の第3アームであり、ロボットアーム20の最も先端のアームである。
The
また、シャフト241の長手方向の途中には、ボールねじナット243と、スプラインナット244と、が設置されており、シャフト241は、これらによって支持されている。これらボールねじナット243およびスプラインナット244は、この順で+z軸側から離間して配置されている。
Further, a
ボールねじナット243は、内輪243Aと、内輪243Aの外周側に同心的に配置された外輪243Bとを有する。これら内輪243Aおよび外輪243Bの間には、図示しない複数のボールが配置されており、ボールの移動とともに内輪243Aおよび外輪243Bは、互いに相対的に回転する。
The
また、内輪243Aは、外輪243Bから露出した部分を有し、この露出した部分に後述するベルト284が掛け回されている。また、内輪243Aは、その内部にシャフト241を挿通し、後述するように、シャフト241をz軸方向に沿って移動可能に支持している。また、外輪243Bは、ベース231に固定されている。
Further, the
スプラインナット244は、内輪244Aと、内輪244Aの外周側に同心的に配置された外輪244Bとを有する。これら内輪244Aおよび外輪244Bの間には、図示しない複数のボールが配置されており、ボールの移動とともに内輪244Aおよび外輪244Bは、互いに相対的に回転する。
The
また、内輪244Aは、外輪244Bから露出した部分を有し、この露出した部分に後述するベルト274が掛け回されている。また、内輪244Aは、その内部にシャフト241を挿通し、シャフト241をz軸回り、すなわち、u軸方向に回転可能に支持している。また、外輪244Bは、後述するベース231の凹部230Cに固定されている。
Further, the
また、スプラインナット244の−z軸側には、回転支持部材242が設置されている。この回転支持部材242は、外筒245と、外筒245の内側に設けられた回転体246と、を有する。外筒245は、ベース231に固定されている。一方、回転体246は、シャフト241には固定されているが、シャフト241とともにz軸回りに回転可能に外筒245に支持されている。
Further, a
シャフト241を回転させるu駆動ユニット27が駆動すると、シャフト241は、z軸回りに正逆回転、すなわち、回転する。また、位置センサー273により、第2アーム23に対するシャフト241の回転量が検出できるようになっている。
When the
また、シャフト241をz軸方向に移動させるz駆動ユニット28が駆動すると、シャフト241は、上下方向、すなわち、z軸方向に移動する。また、位置センサー283により、第2アーム23に対するシャフト241のz軸方向の移動量が検出できるようになっている。
Further, when the
また、シャフト241の先端部には、各種のエンドエフェクターが着脱可能に連結される。エンドエフェクターとしては、特に限定されず、例えば、被搬送物を把持するもの、被加工物を加工するもの、検査に使用するもの等が挙げられる。
In addition, various end effectors are detachably connected to the tip of the
なお、エンドエフェクター7は、本実施形態では、ロボット2の構成要素になっていないが、エンドエフェクター7の一部または全部がロボット2の構成要素になっていてもよい。また、エンドエフェクター7は、本実施形態では、ロボットアーム20の構成要素になっていないが、エンドエフェクター7の一部または全部がロボットアーム20の構成要素になっていてもよい。
Although the
また、本実施形態では、エンドエフェクター7は、ロボットアーム20に対して着脱可能であるが、これに限定されず、例えば、エンドエフェクター7は、ロボットアーム20から離脱不能になっていてもよい。
なお、図3では、エンドエフェクター7の図示を省略している。
Further, in the present embodiment, the
In FIG. 3, the
また、図1に示すように、力検出部5は、ロボット2に加わる力、すなわち、ロボットアーム20および基台21に加わる力を検出するものである。力検出部5は、本実施形態では、基台21の下方、すなわち、−z軸側に設けられており、基台21を下方から支持している。
Further, as shown in FIG. 1, the
力検出部5は、例えば、水晶等の圧電体で構成され、外力を受けると電荷を出力する複数の素子を有する構成とすることができる。また、制御装置8は、この電荷量に応じて、ロボットアーム20が受けた外力に変換することができる。また、このような圧電体であると、設置する向きに応じて、外力を受けた際に電荷を発生させる向きを調整可能である。
The
なお、力検出部5の設置位置は、図示の構成に限定されず、例えば、シャフト241の先端に設置されていてもよい。
The installation position of the
撮像部6は、例えば、複数の画素を有するCCD(Charge Coupled Device)イメージセンサーで構成された撮像素子と、レンズ等を含む光学系と、を有する。撮像部6は、撮像対象等からの光をレンズによって撮像素子の受光面で結像させて、光を電気信号に変換し、その電気信号を制御装置8へと出力する。そして、制御装置8は、この電気信号、すなわち、撮像結果に基づいて、ロボットアーム20の駆動を制御する。なお、撮像素子は、撮像機能を有する構成であれば、前述の構成に限定されず他の構成であってもよい。なお、「対象」としては、ワークや、工具や、その他の物体等の障害物のことを言う。
The
図1および図2に示すように、制御装置8は、本実施形態では、基台21に内蔵されている。また、図2に示すように、制御装置8は、ロボット2の駆動を制御する機能を有し前述したロボット2の各部と電気的に接続されている。制御装置8は、CPU(Central Processing Unit)81と、記憶部82と、通信部83と、を有する。これらの各部は、例えばバスを介して相互に通信可能に接続されている。
As shown in FIGS. 1 and 2, the control device 8 is built in the base 21 in this embodiment. Further, as shown in FIG. 2, the control device 8 has a function of controlling the drive of the
CPU81は、記憶部82に記憶されている各種プログラム等を読み出し、実行する。CPU81で生成された指令信号は、通信部83を介してロボット2に送信される。これにより、ロボットアーム20が所定の作業を実行することができる。
The
記憶部82は、CPU81が実行可能な各種プログラム等を保存する。記憶部82としては、例えば、RAM(Random Access Memory)等の揮発性メモリー、ROM(Read Only Memory)等の不揮発性メモリー、着脱式の外部記憶装置等が挙げられる。
The
通信部83は、例えば有線LAN(Local Area Network)、無線LAN等の外部インターフェースを用いてロボット2の各部および他の機器、例えば、教示装置との間でそれぞれ信号の送受信を行う。教示装置としては、例えば、タブレット、スマートフォン、パソコン、ティーチングペンダント等が挙げられる。
The
次に、装着用部材9について説明する。
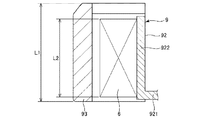
図3〜図6に示すように、装着用部材9は、撮像部6を、カバー部材232の外側に設置するための部材である。装着用部材9は、ベース231に固定される固定部91と、撮像部6が着脱可能に装着される複数の装着部92と、保護部材93と、緩衝部材94と、を有する。
Next, the mounting
As shown in FIGS. 3 to 6, the mounting
図4〜図6に示すように、固定部91は、ベース231に固定された状態において、+y軸側に位置する第1固定部91Aと、+x軸側に位置する第2固定部91Bと、−x軸側に位置する第3固定部91Cと、を有し、全体形状がU字状をなす剛体で構成されている。また、固定部91をベースに固定した際、第3アーム24のシャフト241は、第1固定部91A〜第3固定部91Cの間の空間に位置する。すなわち、空間は、第3アーム24を挿通する挿通部として機能する。
As shown in FIGS. 4 to 6, the fixing
このように、装着用部材9は、第3アーム24を通る挿通部としての空間を有する。これにより、装着用部材9をベース231に固定した際、装着用部材9が第3アーム24の動作を阻害するのを防止することができる。また、装着部92に装着された撮像部6の光軸を可及的に第3軸O3に近づけることができる。
As described above, the mounting
第1固定部91Aは、ベース231に固定された状態において、x軸方向に沿って延在する長尺状をなしている。第2固定部91Bは、第1固定部91Aの一端部、すなわち、+y軸側の端部から延出している。第2固定部91Bは、ベース231に固定された状態において、y軸方向に沿って延在する長尺状をなしている。第3固定部91Cは、第1固定部91Aの他端部、すなわち、−y軸側の端部から延出している。第3固定部91Cは、ベース231に固定された状態において、y軸方向に沿って延在する長尺状をなしている。
The
また、第1固定部91Aは、+z軸側に突出した突出部911Aを有する。また、第1固定部91Aは、突出部911Aに対応する部分に貫通孔912Aを有する。また、第2固定部91Bは、+z軸側に突出した突出部911Bを有する。また、第2固定部91Bは、突出部911Bに対応する部分に貫通孔912Bを有する。また、第3固定部91Cは、+z軸側に突出した突出部911Cを有する。また、第3固定部91Cは、突出部911Cに対応する部分に貫通孔912Cを有する。
Further, the first fixed
これら貫通孔912A〜貫通孔912Cは、例えば、ネジ、ボルト等の固定部材200を挿通する部分である。これにより、貫通孔912A、貫通孔912Bおよび貫通孔912Cを挿通して固定部材200をベース231に固定することができる。よって、固定部91をベース231に安定的に固定することができる。
These through
また、突出部911A〜突出部911Cを有することにより、固定部91をベース231に固定した状態では、固定部91の、装着部92が装着される部分が、開口233の外側に位置することとなる。よって、装着部92をカバー部材232の外側に配置することができる。また、装着部92の着脱操作を容易に行うことができる。
Further, by having the projecting
このような第1固定部91A、第2固定部91Bおよび第3固定部91Cには、それぞれ、1つの装着部92を着脱可能に装着することができる。この着脱機構は、図示の構成では、ネジ、ボルト等の固定部材400を用いた構成である。ただし、この構成に限定されず、例えば、磁石による固定や、任意の着脱機構を用いてもよい。
One mounting
なお、以下では、一例として、図6に示すように、第1固定部91Aおよび第2固定部91Bに装着部92が装着されている状態を例に挙げて説明する。なお、以下では、第1固定部91Aに装着されている装着部92を第1装着部である装着部92Aとし、第2固定部91Bに装着されている装着部92を第2装着部である装着部92Bとして説明する。なお、装着部が3つ以上設置される場合、これらのうちの任意の2つが第1装着部および第2装着部となる。
In the following, as an example, as shown in FIG. 6, a state in which the mounting
このように装着用部材9は、ベース231に固定される固定部91を有する。そして、第1装着部である装着部92Aおよび第2装着部である装着部92Bは、固定部91に対し着脱可能に接続される。これにより、撮像部6を設置しない箇所の装着部92を離脱させることができる。よって、撮像部6が装着されていない装着部92がロボットアーム20の作動時に他の部位と干渉するのを防止することができる。
In this way, the mounting
装着部92Aおよび装着部92Bは、互いに異なる位置に設置されている。本実施形態では、装着部92Aは、第2アーム23の+y軸側に設置され、装着部92Bは、第2アーム23の+x軸側に設置される。
The mounting
すなわち、第1装着部である装着部92Aは、ベース231の延在方向において、第3軸O3に対して第2軸O2が位置する位置とは反対側に設置され、第2装着部である装着部92Bは、ベース231の延在方向における側方とに設置可能である。これにより、ロボットアーム20の動作に応じて、第2アーム23の先端側に撮像部6を設置するか、第2アーム23の側方に撮像部6を設置するかを選択することができる。
That is, the mounting
また、装着部92Aおよび装着部92Bは、同様の構成であるため、以下、装着部92Aを代表的に説明する。
Further, since the mounting
装着部92Aは、剛体であり、互いに直交する2つの板状部である第1板状部921および第2板状部922を有する。すなわち、第1装着部である装着部92Aおよび第2装着部である装着部92Bは、それぞれ、互いに交わる方向に配置される第1板状部921および第2板状部922を有する。これにより、固定部91から離間した位置に安定的に撮像部6を設置することができる。
The mounting
第1板状部921は、固定部91がベース231に固定された状態において、z軸方向を厚さ方向とする向きとなる。この第1板状部921は、固定部91に着脱可能に固定される部分である。
The first plate-shaped
第2板状部922は、固定部91がベース231に固定された状態において、z軸方向と交わる方向、すなわち、y軸方向を厚さ方向とする向きとなる。なお、装着部92Bでは、第2板状部922は、固定部91がベース231に固定された状態において、x軸方向を厚さ方向とする向きとなる。
The second plate-shaped
第2板状部922の外側の面、すなわち、カバー部材232と遠位側の面には、撮像部6が着脱可能に固定される。第2板状部922には、複数のネジ孔923が設けられている。本実施形態では、ネジ孔923は、8つ設けられている。また、4つのネジ孔923がz軸方向に並んだ列状をなしており、この列が2列設けられている。これらのネジ孔923から複数選択して撮像部6をネジ止めすることができる。また、z軸方向のどの位置のネジ孔923を使用するかを選択することにより、第2板状部922に対する撮像部6の装着位置を調整することができる。すなわち、本実施形態では、各ネジ孔923が、装着位置を調整する装着位置調整機構として機能する。
The
換言すれば、装着用部材9は、撮像部6の、第1装着部である装着部92Aおよび第2装着部である装着部92Bに対する第3軸O3に沿った方向、すなわち、z軸方向における装着位置を調整する装着位置調整機構を有する。これにより、例えば、撮像部6のサイズや拡大倍率に応じて所望の高さに撮像部6を装着することができる。
In other words, the mounting
このように、複数の装着部92、本実施形態では、装着部92Aおよび装着部92Bに対し、撮像部6を選択的に装着することができる。これにより、例えば、ロボットアーム20の動作に応じて、撮像部6がロボットアーム20と干渉しにくい位置を選択して撮像部6を装着することができる。また、例えば、ロボットアーム20の動作範囲の周辺の環境に応じて、周辺の物品に撮像部6が干渉しにくい位置を選択して撮像部6を装着することができる。
As described above, the
また、図示の構成では、装着部92Aに撮像部6が配置され、装着部92Bには、配線群300が固定されている。配線群300は、複数の配線が束ねられたものである。この複数の配線としては、例えば、撮像部6やエンドエフェクター7に電力を供給する配線や、エンドエフェクター7が吸引によりワークを把持する構成であった場合、空気を供給、吸引する配管等が挙げられる。なお、図示の構成では、装着部92Aに撮像部6が設置されているが、装着部92Bの配線群300を省略し、装着部92Bにも撮像部6を装着してもよい。
Further, in the illustrated configuration, the
また、装着部92Aおよび装着部92Bには、保護部材93が着脱可能に装着される。保護部材93は、半円筒状をなしている。保護部材93は、装着部92Aに装着された撮像部6を覆って保護する機能や、装着部92Bに固定された配線群300を保護する機能を有する。
Further, the
このように、装着用部材9は、第1装着部である装着部92Aまたは第2装着部である装着部92Bに装着された撮像部6を覆う保護部材93を有する。これにより、撮像部6を保護することができる。よって、ロボットアーム20の動作中に撮像部6が外部と直接接触するのを防止することができる。よって、撮像部6は、安定的に撮像を行うことができる。
As described above, the mounting
また、保護部材93は、緩衝機能を有するのが好ましい。すなわち、保護部材93の少なくとも外面は、弾性を有する材料で構成されるのが好ましい。弾性を有する材料としては、例えば、各種ゴム材料、各種樹脂材料等が挙げられる。保護部材93が緩衝機能を有することにより、さらに安全性を高めることができる。
Further, the
また、図7に示すように、保護部材93の全長、すなわち、z軸方向の長さL1は、撮像部6の全長、すなわち、z軸方向の長さL2よりも大きい。具体的には、撮像部6の装着部92に対する装着位置に関わらず、保護部材93が撮像部6を覆うことができる。
Further, as shown in FIG. 7, the total length of the
また、緩衝部材94は、固定部91のうち、装着部92が装着されていない部分に着脱可能に装着される。図示の構成では、緩衝部材94は、第3固定部91Cの−x軸側の面に装着される。緩衝部材94の少なくとも外面は、弾性を有する材料で構成されるのが好ましい。弾性を有する材料としては、例えば、各種ゴム材料、各種樹脂材料等が挙げられる。これにより、第3固定部91Cが外側に露出するのを防止することができる。よって、さらに安全性を高めることができる。
Further, the cushioning
このように、装着用部材9は、固定部91の第1装着部である装着部92Aおよび第2装着部である装着部92Bが装着されていない部分、本実施形態では、第3固定部91Cに着脱可能に装着される緩衝部材94を有する。これにより、第3固定部91Cが外側に露出するのを防止することができる。よって、さらに安全性を高めることができる。
As described above, the mounting
なお、保護部材93の装着部92に対する着脱機構および緩衝部材94の固定部91に対する着脱機構としては、特に限定されず、例えば、ネジ止め、磁石等、任意の着脱機構を用いることができる。
The attachment / detachment mechanism of the
以上説明したように、本発明のロボット2は、基台21と、基台21に接続され、第1軸O1回りに回動する第1アーム22と、第1アーム22に接続され、第1軸O1と交わる方向に延在するベース231と、開口233を有し、ベース231を覆うカバー部材232と、を有し、第1軸O1と平行な第2軸O2回りに回動する第2アーム23と、第2アーム23に接続され、第1軸O1と平行な第3軸O3回りに回動し、かつ、第3軸O3に沿って移動する第3アーム24と、互いに異なる位置に設置され、撮像部6が着脱可能に装着される第1装着部である装着部92Aおよび第2装着部である装着部92Bを有する装着用部材9と、を備える。また、装着用部材9は、第1装着部である装着部92Aおよび第2装着部である装着部92Bがカバー部材232の外側に位置するように開口233を通って231ベースに固定される。これにより、装着部92Aおよび装着部92Bに対し、撮像部6を選択的に装着することができる。よって、例えば、ロボットアーム20の動作に応じて、撮像部6がロボットアーム20と干渉しにくい位置を選択して撮像部6を装着することができる。また、例えば、ロボットアーム20の動作範囲の周辺の環境に応じて、周辺の物品に撮像部6が干渉しにくい位置を選択して撮像部6を装着することができる。
As described above, the
なお、本実施形態では、装着用部材6には、撮像部6および配線群300が設置されている場合について説明したが、本発明ではこれに限定されず、例えば、近接センサーやエンドエフェクター等を設置してもよい。
In the present embodiment, the case where the
<第2実施形態>
図8は、本発明のロボットの第2実施形態が備える装着用部材の装着部の縦断面図である。
<Second Embodiment>
FIG. 8 is a vertical cross-sectional view of a mounting portion of a mounting member included in the second embodiment of the robot of the present invention.
以下、図8を参照して本発明のロボットの第3実施形態について説明するが、前述した実施形態との相違点を中心に説明し、同様の事項はその説明を省略する。 Hereinafter, a third embodiment of the robot of the present invention will be described with reference to FIG. 8, but the differences from the above-described embodiment will be mainly described, and the same matters will be omitted.
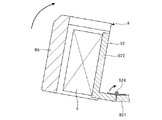
図8に示すように、本実施形態では、装着部92の第1板状部921は、2つの板状部で構成されている。また、各板状部は、蝶番924によって回動可能に連結されている。これにより、各板状部が回動した際、第2板状部922、撮像部6および保護部材93がともに回動することができる。
As shown in FIG. 8, in the present embodiment, the first plate-shaped
なお、蝶番924の回動軸は、図6に示す装着部92Aの場合、x軸方向と平行であり、装着部92Bの場合、y軸方向と平行である。
The rotation axis of the
このような構成によれば、ロボットアーム20が回転している際、保護部材93に何らかの物体が衝突して保護部材93に外力が加わったとしても、第2板状部922、撮像部6および保護部材93がカバー部材232側、すなわち、図8中矢印方向に変位、すなわち、回動することができる。よって、衝突した物体に過剰な衝撃が加わるのを防止することができ、安全性を高めることができる。また、保護部材93の緩衝作用との相乗効果により、安全性をさらに高めることができる。
According to such a configuration, even if some object collides with the
このように、装着用部材9は、撮像部6を変位可能に支持する。これにより、安全性をさらに高めることができる。
In this way, the mounting
なお、装着用部材9が変位する方向は、図示の構成に限定されず、例えば、水平方向であってもよく、鉛直方向であってもよい。これらは、蝶番924に代えて、スライド機構を設けることにより実現することができる。
The direction in which the mounting
<第3実施形態>
図9は、本発明のロボットの第3実施形態が備える先端側装着用部材の斜視図である。
<Third Embodiment>
FIG. 9 is a perspective view of a tip-side mounting member included in the third embodiment of the robot of the present invention.
以下、図9を参照して本発明のロボットの第3実施形態について説明するが、前述した実施形態との相違点を中心に説明し、同様の事項はその説明を省略する。 Hereinafter, a third embodiment of the robot of the present invention will be described with reference to FIG. 9, but the differences from the above-described embodiment will be mainly described, and the same matters will be omitted.
図9に示すように、本実施形態では、ロボット2は、シャフト241の先端部に着脱可能に装着される先端側装着用部材95をさらに有する。
As shown in FIG. 9, in the present embodiment, the
先端側装着用部材95は、第1板状部951と、第2板状部952とを有する。第1板状部951は、鉛直方向を厚さ方向とする向きでシャフト241に装着される。第1板状部951は、シャフト241を挿通する貫通孔953を有する。
The tip-
第2板状部952は、水平方向を厚さ方向とする向きで第1板状部951から鉛直下方に垂設されている。第2板状部952の第1板状部951と反対側の面状には、撮像部6を着脱可能に設置することができる。また、第2板状部952には、前記実施形態で述べた保護部材93が設置される。
The second plate-shaped
このような先端側装着用部材95を、前記実施形態で述べた装着用部材9と併用することにより、撮像部6の設置位置の選択肢をさらに増やすことができる。
By using such a tip-
以上、本発明のロボットを図示の実施形態に基づいて説明したが、本発明は、これに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、他の任意の構成物が付加されていてもよい。 The robot of the present invention has been described above based on the illustrated embodiment, but the present invention is not limited to this, and the configuration of each part may be replaced with an arbitrary configuration having the same function. Can be done. Moreover, other arbitrary components may be added.
また、前記実施形態では、ロボットアームの回転軸の数は、3つであるが、本発明では、これに限定されず、ロボットアームの回転軸の数は、例えば、2つ、または、4つ以上でもよい。すなわち、前記実施形態では、アームの数は、3つであるが、本発明では、これに限定されず、アームの数は、例えば、2つ、または、4つ以上でもよい。 Further, in the above-described embodiment, the number of rotation axes of the robot arm is three, but the present invention is not limited to this, and the number of rotation axes of the robot arm is, for example, two or four. The above may be sufficient. That is, in the above embodiment, the number of arms is three, but in the present invention, the number of arms is not limited to this, and the number of arms may be, for example, two or four or more.
2…ロボット、4…受付部、5…力検出部、6…撮像部、7…エンドエフェクター、8…制御装置、9…装着用部材、20…ロボットアーム、21…基台、22…第1アーム、23…第2アーム、24…第3アーム、25…駆動ユニット、26…駆動ユニット、27…u駆動ユニット、28…z駆動ユニット、29…角速度センサー、81…CPU、82…記憶部、83…通信部、91…固定部、91A…第1固定部、91B…第2固定部、91C…第3固定部、92…装着部、92A…装着部、92B…装着部、93…保護部材、94…緩衝部材、95…先端側装着用部材、100…ロボットシステム、200…固定部材、220…筐体、230C…凹部、231…ベース、232…カバー部材、233…開口、234…カバー部材、241…シャフト、242…回転支持部材、243…ボールねじナット、243A…内輪、243B…外輪、244…スプラインナット、244A…内輪、244B…外輪、245…外筒、246…回転体、251…モーター、252…減速機、253…位置センサー、261…モーター、262…減速機、263…位置センサー、271…モーター、272…減速機、273…位置センサー、274…ベルト、275…プーリー、281…モーター、282…減速機、283…位置センサー、284…ベルト、285…プーリー、300…配線群、400…固定部材、800…配管、900…配管支持部、911A…突出部、911B…突出部、911C…突出部、912A…貫通孔、912B…貫通孔、912C…貫通孔、921…第1板状部、922…第2板状部、923…ネジ孔、924…蝶番、951…第1板状部、952…第2板状部、953…貫通孔、O1…第1軸、O2…第2軸、O3…第3軸、L1…長さ、L2…長さ 2 ... Robot, 4 ... Reception part, 5 ... Force detection unit, 6 ... Imaging unit, 7 ... End effector, 8 ... Control device, 9 ... Mounting member, 20 ... Robot arm, 21 ... Base, 22 ... First Arm, 23 ... 2nd arm, 24 ... 3rd arm, 25 ... drive unit, 26 ... drive unit, 27 ... u drive unit, 28 ... z drive unit, 29 ... angular speed sensor, 81 ... CPU, 82 ... storage unit, 83 ... Communication unit, 91 ... Fixed part, 91A ... 1st fixed part, 91B ... 2nd fixed part, 91C ... 3rd fixed part, 92 ... Mounting part, 92A ... Mounting part, 92B ... Mounting part, 93 ... Protective member , 94 ... cushioning member, 95 ... tip side mounting member, 100 ... robot system, 200 ... fixing member, 220 ... housing, 230C ... recess, 231 ... base, 232 ... cover member, 233 ... opening, 234 ... cover member , 241 ... Shaft, 242 ... Rotational support member, 243 ... Ball screw nut, 243A ... Inner ring, 243B ... Outer ring, 244 ... Spline nut, 244A ... Inner ring, 244B ... Outer ring, 245 ... Outer cylinder, 246 ... Rotating body, 251 ... Motor, 252 ... Reducer, 253 ... Position sensor, 261 ... Motor, 262 ... Reducer, 263 ... Position sensor, 271 ... Motor, 272 ... Reducer, 273 ... Position sensor, 274 ... Belt, 275 ... Pulley, 281 ... Motor, 282 ... Reducer, 283 ... Position sensor, 284 ... Belt, 285 ... Pulley, 300 ... Wiring group, 400 ... Fixed member, 800 ... Piping, 900 ... Piping support, 911A ... Protruding part, 911B ... Protruding part, 911C ... protruding part, 912A ... through hole, 912B ... through hole, 912C ... through hole, 921 ... first plate-shaped part, 922 ... second plate-shaped part, 923 ... screw hole, 924 ... hinge, 951 ... first plate Shaped part, 952 ... 2nd plate-shaped part, 953 ... Through hole, O1 ... 1st axis, O2 ... 2nd axis, O3 ... 3rd axis, L1 ... Length, L2 ... Length
Claims (11)
前記基台に接続され、第1軸回りに回動する第1アームと、
前記第1アームに接続され、前記第1軸と交わる方向に延在するベースと、開口を有し、前記ベースを覆うカバー部材と、を有し、前記第1軸と平行な第2軸回りに回動する第2アームと、
前記第2アームに接続され、前記第1軸と平行な第3軸回りに回動し、かつ、前記第3軸に沿って移動する第3アームと、
互いに異なる位置に設置され、撮像部が着脱可能に装着される第1装着部および第2装着部を有する装着用部材と、を備え、
前記装着用部材は、前記第1装着部および前記第2装着部が前記カバー部材の外側に位置するように前記開口を通って前記ベースに固定されることを特徴とするロボット。 Base and
A first arm connected to the base and rotating around the first axis,
Around a second axis that is connected to the first arm and extends in a direction intersecting the first axis, has an opening, and has a cover member that covers the base, and is parallel to the first axis. The second arm that rotates to
A third arm connected to the second arm, rotating around a third axis parallel to the first axis, and moving along the third axis.
A mounting member having a first mounting portion and a second mounting portion, which are installed at different positions from each other and to which the imaging unit is detachably mounted, is provided.
The robot is characterized in that the mounting member is fixed to the base through the opening so that the first mounting portion and the second mounting portion are located outside the cover member.
前記第1装着部および前記第2装着部は、前記固定部に対し着脱可能に接続される請求項1ないし3のいずれか1項に記載のロボット。 The mounting member has a fixing portion fixed to the base.
The robot according to any one of claims 1 to 3, wherein the first mounting portion and the second mounting portion are detachably connected to the fixed portion.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019215801A JP2021084192A (en) | 2019-11-28 | 2019-11-28 | robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019215801A JP2021084192A (en) | 2019-11-28 | 2019-11-28 | robot |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021084192A true JP2021084192A (en) | 2021-06-03 |
| JP2021084192A5 JP2021084192A5 (en) | 2022-11-25 |
Family
ID=76088693
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019215801A Withdrawn JP2021084192A (en) | 2019-11-28 | 2019-11-28 | robot |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2021084192A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7364285B1 (en) | 2022-11-11 | 2023-10-18 | 高丸工業株式会社 | How the robot handling system works |
-
2019
- 2019-11-28 JP JP2019215801A patent/JP2021084192A/en not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7364285B1 (en) | 2022-11-11 | 2023-10-18 | 高丸工業株式会社 | How the robot handling system works |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9481085B2 (en) | Horizontal articulated robot | |
| US10209152B2 (en) | Force sensor unit and robot arm including a wire cable routed from inside a casing to outside of the casing | |
| JP6862854B2 (en) | Control device, robot system and screw tightening torque setting method | |
| EP3461599A1 (en) | Robot | |
| JP2012127497A (en) | Ball joint having passageway for routing cable therethrough | |
| CN107073707B (en) | Robot | |
| JP6958200B2 (en) | robot | |
| JP2009078312A (en) | Articulated robot hand and articulated robot using the same | |
| JP7279180B2 (en) | articulated robot | |
| JP6923489B2 (en) | Horizontal articulated robot | |
| JP7451889B2 (en) | robot | |
| JP2021084192A (en) | robot | |
| US11420326B2 (en) | Horizontal articulated robot | |
| CN113319848A (en) | Robot control method and robot system | |
| US20160306340A1 (en) | Robot and control device | |
| KR101801302B1 (en) | Robot hand and surface robot system using of the same for working | |
| JP2019010683A (en) | Robot control device and robot system | |
| US20200047350A1 (en) | Collaborative robot | |
| CN111482947B (en) | Horizontal multi-joint robot | |
| CN111745622B (en) | robot | |
| JP7069757B2 (en) | Horizontal articulated robot | |
| CN112008746A (en) | Robot | |
| CN111660293B (en) | Horizontal multi-joint robot | |
| WO2022153478A1 (en) | Force sensor, collaborative robot, and robot | |
| CN116460827A (en) | Robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221116 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230919 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230920 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20231030 |