JP2021069138A - Power converter control method and power converter control device - Google Patents
Power converter control method and power converter control device Download PDFInfo
- Publication number
- JP2021069138A JP2021069138A JP2019190524A JP2019190524A JP2021069138A JP 2021069138 A JP2021069138 A JP 2021069138A JP 2019190524 A JP2019190524 A JP 2019190524A JP 2019190524 A JP2019190524 A JP 2019190524A JP 2021069138 A JP2021069138 A JP 2021069138A
- Authority
- JP
- Japan
- Prior art keywords
- power converter
- pulse
- pulse pattern
- switching
- rotation speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 69
- 238000006243 chemical reaction Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 13
- 238000001514 detection method Methods 0.000 description 7
- 238000005259 measurement Methods 0.000 description 7
- 239000003990 capacitor Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 238000005352 clarification Methods 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000003079 width control Methods 0.000 description 1
Images










Landscapes
- Control Of Ac Motors In General (AREA)
- Inverter Devices (AREA)
Abstract
Description
本発明は、電力変換器の制御方法、及び、電力変換器の制御装置に関するものである。 The present invention relates to a control method for a power converter and a control device for the power converter.
電力変換器は、複数のスイッチング素子を有しており、これらのスイッチング素子が操作されることにより直流電力を交流電力に変換する。スイッチング素子の操作においては、オン又はオフとなる区間のパルス幅が変化される。このようなパルス幅の制御は、一般に、PWM(Pulse Width Modulation)制御と称される。PWM制御においては、所定の周期でパルスパターンを変化させることにより、電力変換器からの出力が制御される。 The power converter has a plurality of switching elements, and the DC power is converted into AC power by operating these switching elements. In the operation of the switching element, the pulse width of the on or off section is changed. Such pulse width control is generally referred to as PWM (Pulse Width Modulation) control. In PWM control, the output from the power converter is controlled by changing the pulse pattern at a predetermined cycle.
例えば、特許文献1には、負荷がモータである例が示されており、モータを駆動するためにPWM制御を行う場合において、モータの回転速度に応じて、正弦波制御、過変調制御、及び、矩形波制御との間で制御モードを切り替える技術が開示されている。これらの制御モードのうち、正弦波制御及び過変調制御においては、それぞれ、PWM制御が行われ、モータの運転状態に応じたパルスパターンを用いてスイッチング素子の操作が行われる。 For example, Patent Document 1 shows an example in which the load is a motor, and when PWM control is performed to drive the motor, sine wave control, overmodulation control, and , A technique for switching the control mode between the square wave control and the rectangular wave control is disclosed. Among these control modes, in the sine wave control and the overmodulation control, PWM control is performed, respectively, and the switching element is operated using a pulse pattern according to the operating state of the motor.
ここで、電力変換器のスイッチング素子におけるスイッチング間隔が短くなると、サージ電圧が発生し、電力変換器の耐久性が低下するおそれがある。これに対し、特許文献1に開示されている技術では、あらかじめ記憶されたパルスパターンにおいては、パルス幅が極めて短い狭小パルスが含まれないように設計することができる。しかしながら、このようにパルスパターンが設計された場合であっても、パルスパターンの切り替え時においては、その切り替え前後においてスイッチング間隔が短くなり、狭小パルスが生じるおそれがある。 Here, if the switching interval in the switching element of the power converter is shortened, a surge voltage may be generated and the durability of the power converter may be lowered. On the other hand, in the technique disclosed in Patent Document 1, the pulse pattern stored in advance can be designed so as not to include a narrow pulse having an extremely short pulse width. However, even when the pulse pattern is designed in this way, when the pulse pattern is switched, the switching interval becomes short before and after the switching, and a narrow pulse may occur.
本発明においては、上記課題を解決するためになされたものであり、パルスパターンが切り替わる場合における狭小パルスの発生を抑制可能な、電力変換器の制御方法、及び、電力変換器の制御装置を提供する。 The present invention provides a power converter control method and a power converter control device, which have been made to solve the above problems and can suppress the generation of narrow pulses when the pulse pattern is switched. To do.
本発明の電力変換器の制御方法は、所定の制御周期で繰り返されるパルスパターンに応じたPWM制御を用いて、スイッチング素子の導通状態を変化させることで、直流電力を交流電力に変換する電力変換器の制御方法である。電力変換器の制御方法は、電力変換器と接続される負荷に対する制御指令値に応じて、パルスパターンを切り替えるか否かを判断する切り替え判断ステップと、切り替え判断ステップにおいて、パルスパターンを切り替えると判断される場合に、切り替えタイミングの直前の第1パルスパターンにおける導通状態の変化タイミングと、切り替えタイミングの直後の第2パルスパターンにおける導通状態の変化タイミングとの間の時間を、切り替えタイミングをまたぐパルスのパルス幅として推測する、パルス幅推測ステップと、パルス幅推測ステップにおいて推測されたパルス幅が、閾値を上回るか否かを判定する、判定ステップと、判定ステップにおいてパルス幅が閾値を上回ると判定される場合には、切り替えタイミングにおいて、パルスパターンの切り替えを行う、切り替えステップと、を有する。 The control method of the power converter of the present invention is a power conversion that converts DC power into AC power by changing the conduction state of the switching element by using PWM control according to a pulse pattern repeated in a predetermined control cycle. It is a control method of the vessel. The control method of the power converter is determined to switch the pulse pattern in the switching determination step of determining whether or not to switch the pulse pattern and the switching determination step according to the control command value for the load connected to the power converter. When this is done, the time between the change timing of the conduction state in the first pulse pattern immediately before the switching timing and the change timing of the conduction state in the second pulse pattern immediately after the switching timing is set as the time of the pulse straddling the switching timing. It is determined in the determination step and the determination step that the pulse width estimated as the pulse width, the pulse width estimation step, and the pulse width estimation step, which is estimated in the pulse width estimation step, exceeds the threshold value. If so, it has a switching step of switching the pulse pattern at the switching timing.
本発明のモータの制御方法によれば、狭小パルスの発生を抑制することができる。 According to the motor control method of the present invention, the generation of narrow pulses can be suppressed.
以下、図面を用いて、本発明の実施形態に係る電力変換器の制御方法、及び、電力変換器の制御装置について説明する。 Hereinafter, the power converter control method and the power converter control device according to the embodiment of the present invention will be described with reference to the drawings.
(第1実施形態)
図1は、第1実施形態に係る電力変換器、及び、その制御装置を備えるモータシステムの概略構成図である。
(First Embodiment)
FIG. 1 is a schematic configuration diagram of a power converter according to the first embodiment and a motor system including the control device thereof.
電力変換器1は、複数のスイッチング素子により構成されるインバータであり、バッテリ2の正極(P)ラインと負極(N)ラインとの間に接続される。電力変換器1は、バッテリ2から供給される直流電力を交流電力に変換し、モータ3に供給する。
The power converter 1 is an inverter composed of a plurality of switching elements, and is connected between the positive electrode (P) line and the negative electrode (N) line of the
電力変換器1においては、制御装置10から出力される指令パルスパターンに応じてスイッチング素子が操作される。そして、スイッチング素子のオン/オフの操作に応じて、バッテリ2から出力される直流電力が交流電力に変換され、変換された交流電力がモータ3に供給される。
In the power converter 1, the switching element is operated according to the command pulse pattern output from the
本実施形態においては、モータ3は、3相で駆動しており、電力変換器1は、3相6アームで駆動できるように、6つのスイッチング素子を備える。なお、このような電力変換器1、及び、モータ3の構成は一例であって、本実施形態の例に限定されるものではない。また、電力変換器1と接続される負荷は、モータ3に限らず、オーディオアンプや無線機のような、交流電力で駆動する他の機器であってもよい。
In the present embodiment, the
キャパシタ4は、正極ラインと負極ラインとの間に設けられており、電力変換器1におけるスイッチング素子の操作に起因するリプルを平滑化する。また、キャパシタ4の両端には電圧センサ5が設けられており、電圧センサ5は、正極ラインと負極ラインとの間の電圧差である直流電圧Vdcを検出すると、直流電圧Vdcを制御装置10へ出力する。直流電圧Vdcは、電力変換器1への入力電力であり、制御装置10による電力変換器1の制御に用いられる。
The capacitor 4 is provided between the positive electrode line and the negative electrode line, and smoothes ripples caused by the operation of the switching element in the power converter 1. Further, voltage sensors 5 are provided at both ends of the capacitor 4, and when the voltage sensor 5 detects the DC voltage V dc which is the voltage difference between the positive electrode line and the negative voltage line, the voltage sensor 5 controls the DC voltage V dc. Output to 10. The DC voltage V dc is the input power to the power converter 1, and is used for controlling the power converter 1 by the
また、電力変換器1とモータ3との間には、電流センサ6が設けられている。電流センサ6は、モータ3に供給されるuvw相の電流測定値iu、iv、iwを測定すると、電流測定値iu、iv、iwを制御装置10へ出力する。
Further, a
モータ3には、レゾルバ7が設けられており、励磁されたレゾルバ7から出力される磁束信号を用いて、制御装置10が備えるモータ回転角度検出部が、モータ3の回転子位置θe、及び、回転数Nを算出する。
A resolver 7 is provided in the
制御装置10は、電力変換器1を含むモータシステム100の全体を制御する。制御装置10は、中央演算装置(CPU)、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)及び入出力インタフェース(I/Oインタフェース)を備えたマイクロコンピュータによって、所定のプログラムを実行可能に構成される。なお、制御装置10は、複数のマイクロコンピュータで構成されてもよい。
The
制御装置10は、パルス幅を変化させるPWM制御を行うために、トルク指令値T*やモータ3の回転数Nに基づいて所望のパルス幅となるような指令パルスパターンを生成し、生成した指令パルスパターンを電力変換器1に出力する。このようにして、電力変換器1が備えるスイッチング素子が制御される。
The
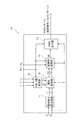
図2は、制御装置10の詳細な構成を示すブロック図である。
FIG. 2 is a block diagram showing a detailed configuration of the
制御装置10は、電流指令値演算部11、電流制御部12、変調率変換部13、PWM出力部14、及び、3相/2相変換部15を備える。電流指令値演算部11から3相/2相変換部15までの構成は、制御装置10の内部に論理的に配置されてもよいし、異なるマイクロコンピュータにより構成されてもよい。
The
電流指令値演算部11は、上位装置からのトルク指令値T*、及び、制御装置10のモータ回転角度検出部からのモータ3の回転数Nを受け付ける。電流指令値演算部11は、これらの入力に基づき、予め記憶しているマップを用いてモータ3に対する電流指令値id *、iq *を算出し、電流指令値id *、iq *を電流制御部12に出力する。
The current command
電流制御部12は、電流指令値演算部11から出力される電流指令値id *、iq *、及び、後述の3相/2相変換部15から出力される電流測定値id、iqを受け付ける。電流制御部12は、電流指令値id *、iq *と電流測定値id、iqとの偏差がゼロとなるように、電圧指令値Vd *、Vq *を決定する。決定された電圧指令値Vd *、Vq *は、変調率変換部13へと出力される。
The
変調率変換部13は、電圧センサ5から出力される直流電圧Vdcと、モータ回転角度検出部から出力される回転子位置θe及び回転数Nと、電流制御部12から出力される電圧指令値Vd *、Vq *とを入力として受け付ける。変調率変換部13は、これらの入力に基づいて、電力変換器1から出力される交流電力の変調率M*を算出する。
The modulation
PWM出力部14は、モータ回転角度検出部から出力される回転子位置θe及び回転数Nと、変調率変換部13から出力される変調率M*とを、入力として受け付ける。PWM出力部14は、これらの入力に基づいて、あらかじめ記憶しているPWM制御に用いられるパルスパターンの中から、適切なパルスパターンを選択して出力する。また、パルスパターンの選択は、所定の制御周期Tごとに行われる。なお、本実施形態においては、後述の図3に示されるように、PWM出力部14が有するPWMパターン切替出力部142において、パルスパターンの切り替えタイミングが制御される。このように指令パルスパターンが制御されることにより、狭小パルスの発生を抑制することができる。
The
3相/2相変換部15は、モータ回転角度検出部から出力される回転子位置θeを用いて、電流センサ6により取得されたuvw相の電流測定値iu、iv、iwに対して、相変換処理を行い、電流測定値id、iqを生成する。そして、3相/2相変換部15は、変換処理により得られた電流測定値id、iqを、電流制御部12へと出力する。
3-phase / 2-
図3は、PWM出力部14の詳細な構成のブロック図である。PWM出力部14は、PWM生成部141、及び、PWMパターン切替出力部142を有する。
FIG. 3 is a block diagram of a detailed configuration of the
PWM生成部141は、変調率変換部13から出力される変調率M*と、モータ回転角度検出部から出力される回転数Nとを受け付けると、予め記憶しているテーブルを参照して、変調率M*、及び、回転数Nに応じた最適な制御モード、及び、その制御モードと対応する指令パルスパターンを決定する。なお、制御モード、及び、指令パルスパターンの決定は、所定の制御周期Tごとに行われ、あるタイミングで決定された指令パルスパターンは、制御周期T後から開始する次の制御周期Tにおいて用いられる。
When the
PWM生成部141は、制御モードとして、矩形波制御モード又はPWM制御モードのいずれかを選択する。矩形波制御モードが選択される場合には、PWM生成部141は、ある制御周期Tにおいて、制御周期Tの全期間において1パルスとなる矩形波パルスを、指令パルスパターンとして出力する。PWM制御モードが選択される場合には、PWM生成部141は、変調率M*、及び、回転数Nに応じてPWM制御に用いるパルスパターンを選択して出力する。
The
矩形波制御モードが選択される場合には、PWMパターン切替出力部142は、PWM生成部141から矩形波パルスを受け付けると、次の制御周期Tにおいて、矩形波パルスを最終指令パルスパターンとして出力する。
When the square wave control mode is selected, the PWM pattern switching
一方、PWM制御モードが選択される場合には、PWMパターン切替出力部142は、PWM生成部141から所定の指令パルスパターンを受け付けると、現在出力中の指令パルスパターンと、PWM生成部141から受け付けた次の制御周期Tにおける指令パルスパターンとが同じであるか否かを判定する。
On the other hand, when the PWM control mode is selected, when the PWM pattern switching
両者の指令パルスパターンが同じである場合には、PWMパターン切替出力部142は、同じ指令パルスパターンの出力を継続する。一方、指令パルスパターンが異なる場合には、後述のように、PWMパターン切替出力部142は、回転数Nと回転子位置θeを用いて、狭小パルスが発生しないように、指令パルスパターンの切り替えタイミングを決定する。そして、PWMパターン切替出力部142は、決定された切り替えタイミングにおいて新しい指令パルスパターンに切り替えられるように、最終指令パルスパターンを出力する。
When both command pulse patterns are the same, the PWM pattern switching
図4は、PWMパターン切替出力部142の詳細な構成のブロック図である。PWMパターン切替出力部142は、角度推定部1421、及び、最終指令出力部1422を有する。
FIG. 4 is a block diagram of a detailed configuration of the PWM pattern switching
ここで、PWM制御が行われる場合のパルス幅(パルス幅)が、パルス閾値Tthを下回るような狭小パルスである場合には、狭小パルスの開始タイミングと終了タイミングにおいてなされるスイッチング操作の間隔が短くなり、サージ電圧が発生してしまう。予め準備されたパルスパターンにおいては、パルス幅はパルス閾値Tthを上回るように設定されている。 Here, when the pulse width (pulse width) when PWM control is performed is a narrow pulse that is lower than the pulse threshold value T th , the interval between the switching operations performed at the start timing and the end timing of the narrow pulse is set. It becomes shorter and a surge voltage is generated. In the pulse pattern prepared in advance, the pulse width is set to exceed the pulse threshold value T th.
しかしながら、切り替えタイミングの前後においては、パルス幅はパルス閾値Tthよりも短くなるおそれがある。すなわち、切り替えタイミングの前のパルスパターンの最後の導通状態の変化タイミングから開始され、切り替えタイミングの後のパルスパターンの最初の導通状態の変化タイミングにおいて終了するパルスは、パルス幅がパルス閾値Tthよりも長くなることが補償されていない。そこで、以下の制御を行うことで、切り替えタイミングをまたぐパルスのパルス幅をパルス閾値Tthよりも長くすることができるので、狭小パルスの発生を抑制することができる。 However, before and after the switching timing, the pulse width may be shorter than the pulse threshold value T th. That is, the pulse width of the pulse starting from the change timing of the last conduction state of the pulse pattern before the switching timing and ending at the change timing of the first conduction state of the pulse pattern after the switching timing has a pulse width from the pulse threshold value T th . Is not compensated for longer. Therefore, by performing the following control, the pulse width of the pulse straddling the switching timing can be made longer than the pulse threshold value T th , so that the generation of a narrow pulse can be suppressed.
また、本実施形態においてモータ3の制御に用いられるPWM制御は、角度同期PWM制御と称されるものである。角度同期PWM制御における指令パルスパターンにおいては、回転子位置θeと、導通状態(オン/オフ)とが対応付けられている。そのため、指令パルスパターンの切り替えタイミングが変更される場合であっても、最終指令出力部1422からは、回転子位置θeに応じて指令パルスパターンに示された導通状態を示すレベルが出力される。
Further, the PWM control used for controlling the
まず、角度推定部1421は、モータ3の回転子位置θe、及び、回転数Nの入力を受け付けると、これらの入力と、あらかじめ記憶している指令パルスパターンと対応する制御周期T、及び、モータ3の極対数Pとを用いて、次式により、推定電気角θestを算出する。
First, when the

推定電気角θestは、現在の指令パルスパターンnから次の指令パルスパターンn+1への切り替えタイミングを、モータ3の電気角により示したものである。角度推定部1421は、所定の周期で推定電気角θestの算出を行っており、ある切り替えタイミングにおいて、次の切り替えタイミングを示す推定電気角θestを算出する。
The estimated electric angle θ est indicates the switching timing from the current command pulse pattern n to the next command pulse pattern n + 1 by the electric angle of the
そこで、(1)式に示されるように、現在の回転子位置θeに、制御周期Tと対応する電気角を加算することにより、次の切り替えタイミングとなる推定電気角θestが算出される。なお、(1)式においては、制御周期Tに対して時間から電気角への単位系の変換を行うために、「(N/60)・P・360」が乗ぜられている。 Therefore, as shown in Eq. (1), the estimated electric angle θ est, which is the next switching timing, is calculated by adding the electric angle corresponding to the control cycle T to the current rotor position θ e. .. In the equation (1), "(N / 60) · P · 360" is multiplied in order to convert the unit system from time to electric angle with respect to the control cycle T.
そして、最終指令出力部1422は、次式に従い、角度推定部1421から出力される推定電気角θestを用いて、現在出力中の指令パルスパターンnから、PWM生成部141から出力される指令パルスパターンn+1へと切り替えられる場合において、その切り替えタイミングをまたぐパルスのパルス幅Tpwmを算出する。
Then, the final
ただし、(2)式におけるパラメータは以下のとおりである。
θ1:指令パルスパターンnにおいて、最後に導通状態が変化する電気角
θ2:指令パルスパターンn+1において、最初に導通状態が変化する電気角
However, the parameters in Eq. (2) are as follows.
θ 1 : Electric angle at which the conduction state changes last in the command pulse pattern n θ 2 : Electric angle at which the conduction state changes first in the command pulse pattern n + 1.
電気角θ1は、切り替えタイミングである推定電気角θest以前において、指令パルスパターンnでの最終のスイッチング素子の導通状態が変化するタイミングを示す電気角である。電気角θ2は、推定電気角θest以降において、指令パルスパターンn+1での最初のスイッチング素子の導通状態が変化するタイミングを示す電気角である。 The electric angle θ 1 is an electric angle indicating the timing at which the conduction state of the final switching element in the command pulse pattern n changes before the estimated electric angle θ est , which is the switching timing. The electric angle θ 2 is an electric angle indicating the timing at which the conduction state of the first switching element in the command pulse pattern n + 1 changes after the estimated electric angle θ est.
すなわち、(θest−θ1)は、推定電気角θest以前のパルス幅を電気角で示したものであり、(θ2−θest)は、推定電気角θest以降のパルス幅を電気角で示したものである。そのため、両者の和である「(θest−θ1)+(θ2−θest)」に対して、電気角から時間への単位系の変換を行うために、「360・(N/60)・P」を除することで、(2)式に示されるように、切り替えタイミングをまたぐパルスのパルス幅Tpwmを求めることができる。 That is, (θ est − θ 1 ) indicates the pulse width before the estimated electric angle θ est by the electric angle, and (θ 2 − θ est ) indicates the pulse width after the estimated electric angle θ est. It is shown by a corner. Therefore, in order to convert the unit system from the electrical angle to time for the sum of the two, "(θ est − θ 1 ) + (θ 2 − θ est)", "360 · (N / 60)" ) ・ P ”is removed to obtain the pulse width T pwm of the pulse that straddles the switching timing, as shown in Eq. (2).
この例においては、推定電気角θestにおいて、指令パルスパターンnと指令パルスパターンn+1の導通状態は同じであるものとする。そのため、導通状態は、電気角θ1でオンに切り替わり、電気角θ2でオフに切り替わり、その結果、推定電気角θestの前後における電気角θ1と電気角θ2との間が、切り替えタイミングをまたぎオン区間となるパルスとなる。なお、推定電気角θestにおいて、指令パルスパターンnと指令パルスパターンn+1とが異なる例については、第2実施形態において説明する。 In this example, it is assumed that the conduction state of the command pulse pattern n and the command pulse pattern n + 1 is the same at the estimated electric angle θ est. Therefore, the conduction state is switched on at the electric angle θ 1 and turned off at the electric angle θ 2 , and as a result, the electric angle θ 1 and the electric angle θ 2 before and after the estimated electric angle θ est are switched. It becomes a pulse that straddles the timing and becomes an on section. An example in which the command pulse pattern n and the command pulse pattern n + 1 are different in the estimated electric angle θ est will be described in the second embodiment.
そして、最終指令出力部1422は、パルス幅Tpwmがパルス閾値Tth以上である場合には、その推定電気角θestにおいて、指令パルスパターンの切り替えを行う。一方、角度推定部1421は、パルス幅Tpwmがパルス閾値Tthよりも短い場合には、狭小パルスの発生を抑制するために、パルス幅Tpwmがパルス閾値Tthよりも短くならないように、切り替えタイミングの再設定を行う。この、切り替えタイミングの再設定、及び、最終的な指令パルスパターンの出力制御について、図5を用いて説明する。
Then, when the pulse width T pwm is equal to or greater than the pulse threshold value T th , the final
図5は、最終指令パルスパターンの決定制御のフローチャートである。制御装置10においては、この決定制御が所定のタイミングで繰り返し行われる。なお、以下においては、説明の明確化のために、図2〜図4に示された制御装置10において所定の機能を実現するブロックが、それぞれの処理を行うものとして説明する。なお、制御装置10が所定の処理を行うことで、所定の機能が実現されてもよい。
FIG. 5 is a flowchart of determination control of the final command pulse pattern. In the
まず、ステップS101において、PWM生成部141は、PWM制御を行っているか否かを判定する。PWM生成部141は、PWM制御を行っている場合には(S101:Yes)、次に、ステップS103の処理を行う。PWM生成部141は、矩形波制御を行っており、PWM制御を行っていない場合には(S101:No)、次に、ステップS102の処理を行う。
First, in step S101, the
ステップS102において、PWM生成部141は、選択されている制御モードである矩形波制御におけるパルスパターンを、最終指令パルスパターンとして出力する。なお、矩形波制御が行われる場合には、制御周期Tの全体にわたって1パルスとなるように、PWM生成部141からはオンまたはオフの導通状態が出力される。
In step S102, the
ステップS103において、変調率変換部13は、直流電圧Vdcと、モータ回転角度検出部から出力される回転子位置θe及び回転数Nと、電流制御部12から出力される電圧指令値Vd *、Vq *との入力を受け付け、これらの入力に基づいて、変調率M*を算出する。なお、回転数Nは、変調率変換部13が回転子位置θeを時間微分することにより算出してもよい。そして、次に、ステップS104の処理が行われる。
In step S103, the modulation
ステップS104において、PWM生成部141は、ステップS102において生成された変調率M*、及び、回転数Nに基づいて、指令パルスパターンを決定する。そして、最終指令出力部1422は、出力中の現在の指令パルスパターンと、決定された次の指令パルスパターンとが同じか否かを判定する。そして、両者が同じであり、変更が不要な場合には(S104:No)、次に、ステップS105の処理が行われる。両者が異なり、出力される指令パルスパターンの変更が必要な場合には(S104:Yes)、次に、ステップS106の処理が行われる。
In step S104, the
ステップS105において、最終指令出力部1422は、次の制御周期Tにおいて、指令パルスパターンを変更せずに、現在出力中の指令パルスパターンと同じ指令パルスパターンを出力する。このようにして、最終指令パルスパターンが決定される。
In step S105, the final
ステップS106においては、角度推定部1421は、回転子位置θe、及び、回転数Nの入力を受け付けると、これらの入力値と、あらかじめ記憶しているパルスパターンと対応する制御周期T、及び、モータ3の極対数Pとを用いて、(1)式により、パルスパターンの切り替えタイミングを電気角により示した推定電気角θestとして算出する。この推定電気角θestは、所定の制御周期Tごとに切り替えられる場合のタイミングを示す。推定電気角θestが算出されると、次に、ステップS107の処理が行われる。
In step S106, when the
ステップS107において、角度推定部1421は、推定電気角θest以前の指令パルスパターンnにおいて導通状態が切り替わる電気角θ1と、推定電気角θest以降の指令パルスパターンn+1において導通状態が切り替わる電気角θ2と、モータ3の回転数N及び極対数Pとを用いて、推定電気角θestで指令パルスパターンの切り替えが行われる場合におけるパルス幅Tpwmを算出する。パルス幅Tpwmが算出されると、次に、ステップS108の処理が行われる。
In step S107, the
ステップS108において、最終指令出力部1422は、ステップS106において算出されたパルス幅Tpwmが、所定のパルス閾値Tth以上であるか否かを判定する。パルス幅Tpwmがパルス閾値Tth以上である場合には(S108:Yes)、最終指令出力部1422は、パルス幅Tpwmが十分に長く、狭小パルスが発生しないと判断し、次に、ステップS109の処理を実行する。パルス幅Tpwmがパルス閾値Tth以上でなく短い場合には(S108:No)、最終指令出力部1422は、狭小パルスが発生する可能性があると判断し、次に、ステップS110の処理を実行する。
In step S108, the final
ステップS109において、最終指令出力部1422は、推定電気角θestを指令パルスパターンの切り替えタイミングと定め、推定電気角θest以前においては指令パルスパターンnを出力し、推定電気角θestよりも後においては指令パルスパターンn+1を出力する。このように推定電気角θestにおいてパルスパターンが切り替わるように、最終指令パルスパターンが定められる。
In step S109, the final
ステップS110において、角度推定部1421は、推定電気角θest以降であって、次に、指令パルスパターンnにおける導通状態と、指令パルスパターンn+1における導通状態とが同じになる電気角を、指令パルスパターンの切り替えタイミングである推定電気角θestとして再設定する。指令パルスパターンnと指令パルスパターンn+1との導通状態とが一致するタイミングにおいては、指令パルスパターンの切り替えを行うことができるため、そのタイミングを推定電気角θestとして再設定する。なお、本再設定処理は、第2実施形態における再設定処理と区別するために、第1再設定処理と称されてもよい。
In step S110, the
そして、ステップS110において再設定された推定電気角θestを用いて、再び、ステップS107の処理を実行する。このような推定電気角θestの再設定は、パルス幅Tpwmがパルス閾値Tth以上となる(S108:Yes)まで、繰り返される。 Then, the process of step S107 is executed again using the estimated electric angle θ est reset in step S110. Such resetting of the estimated electric angle θ est is repeated until the pulse width T pwm becomes equal to or higher than the pulse threshold value T th (S108: Yes).
次に、図6、及び、図7を用いて、本実施形態における指令パルスパターンの出力制御について説明する。これらの図には、それぞれ上から順に、現在出力中の指令パルスパターンn、PWM生成部141により生成される次の制御周期Tにおける指令パルスパターンn+1、及び、最終指令出力部1422から出力される最終指令パルスパターンが示されている。なお、現在の指令パルスパターンnは、切り替えタイミング前が実線で示され、切り替えタイミング後が点線で示されている。また、次の指令パルスパターンn+1は、切り替えタイミング前が点線で示され、切り替えタイミング後が実線で示されている。
Next, the output control of the command pulse pattern in the present embodiment will be described with reference to FIGS. 6 and 7. In these figures, in order from the top, the command pulse pattern n currently being output, the command pulse pattern n + 1 in the next control cycle T generated by the
図6においては、ステップS106において算出される推定電気角θestが指令パルスパターンの切り替えタイミングとなり、図7においては、ステップS110において再設定される推定電気角θestが指令パルスパターンの切り替えタイミングとなるものとする。 In FIG. 6, the estimated electric angle θ est calculated in step S106 is the command pulse pattern switching timing, and in FIG. 7, the estimated electric angle θ est reset in step S110 is the command pulse pattern switching timing. It shall be.
まず、図6の例について説明する。 First, the example of FIG. 6 will be described.
図6においては、ステップS106において算出される推定電気角θestが示されている。そして、上段において、推定電気角θestより前における指令パルスパターンnでの最後の導通状態が切り替わる電気角θ1が示され、中段において、推定電気角θestより後における指令パルスパターンn+1での最初の導通状態が切り替わる電気角θ2が示されている。 In FIG. 6, the estimated electrical angle θ est calculated in step S106 is shown. Then, the upper electrical angle theta 1 which the last conducting state by the command pulse pattern n in prior estimated electrical angle theta est switched is shown in the middle, at the command pulse pattern n + 1 after than the estimated electrical angle theta est The electrical angle θ 2 at which the initial conduction state switches is shown.
ステップS107の処理によって、これらの電気角θ1、θ2に応じたパルス幅Tpwmが算出される。ここで、パルス幅Tpwmがパルス閾値Tth以上であるため(S108:Yes)、図下段に示されるように、推定電気角θestにおいて指令パルスパターンの変更が行われる。 By the process of step S107, the pulse width T pwm corresponding to these electric angles θ 1 and θ 2 is calculated. Here, since the pulse width T pwm is equal to or greater than the pulse threshold value T th (S108: Yes), the command pulse pattern is changed at the estimated electric angle θ est as shown in the lower part of the figure.
次に、図7の例について説明する。 Next, the example of FIG. 7 will be described.
図7においては、上段に、ステップS106において算出される推定電気角θest、及び、ステップS110において再設定される推定電気角θestが示されている。 In Figure 7, the upper, the estimated electrical angle theta est which is calculated in step S106, and re-set the estimated electrical angle theta est is shown in step S110.
上段においては、推定電気角θestより前における指令パルスパターンnで最後に導通状態が切り替わる電気角θ1が示される。中段においては、最初に算出される推定電気角θestより後における指令パルスパターンn+1での最初の導通状態が切り替わる電気角θ2と、再設定される推定電気角θestより後における指令パルスパターンn+1で最初に導通状態が切り替わる電気角θ2とが示されている。そして、下段には、最終的に出力される最終指令パルスパターンが示されている。 In the upper part, the electric angle θ 1 at which the conduction state is finally switched by the command pulse pattern n before the estimated electric angle θ est is shown. In the middle, the command pulse pattern in the first the first conducting state and the electrical angle theta 2 to switch on the command pulse pattern n + 1 after than the estimated electrical angle theta est calculated, after the estimated electrical angle theta est to be reconfigured The electric angle θ 2 at which the conduction state is first switched at n + 1 is shown. The final command pulse pattern that is finally output is shown in the lower row.
まず、ステップS107の処理によって、最初に算出される推定電気角θestと対応する電気角θ1、θ2とを用いてパルス幅Tpwmが算出され、このパルス幅Tpwmはパルス閾値Tthより短い(S108:No)。そのため、狭小パルスが発生するおそれがあると判断され、次に、ステップS110の処理が実行される。ステップS110においては、角度推定部1421は、最初に算出される推定電気角θest以降であって、次に、出力中の指令パルスパターンnにおける導通状態(この図においては、オン状態)と、指令パルスパターンn+1において導通状態(オン状態)とが同じになる電気角を、推定電気角θestとして再設定する。
First, by the process of step S107, the pulse width T pwm is calculated using the estimated electric angle θ est calculated first and the corresponding electric angles θ 1 and θ 2, and this pulse width T pwm is the pulse threshold value T th. Shorter (S108: No). Therefore, it is determined that a narrow pulse may be generated, and then the process of step S110 is executed. In step S110, the
そして、再び、ステップS107の処理によって、再設定される推定電気角θestと対応する電気角θ1、θ2に応じたパルス幅Tpwmが算出される。ここで、パルス幅Tpwmがパルス閾値Tth以上であるため(S108:Yes)、図下段に示されるように、再算出された推定電気角θestにおいて指令パルスパターンの切り替えが行われる。そのため、指令パルスパターンの切り替えタイミングをまたぐパルスのパルス幅Tpwmがパルス閾値Tth以上となるので、狭小パルスの発生を抑制できる。 Then, again, by the process of step S107, the pulse widths T pw m corresponding to the estimated electric angles θ est to be reset and the electric angles θ 1 and θ 2 are calculated. Here, since the pulse width T pwm is equal to or greater than the pulse threshold value T th (S108: Yes), the command pulse pattern is switched at the recalculated estimated electric angle θ est as shown in the lower part of the figure. Therefore, since the pulse width T pwm of the pulse straddling the switching timing of the command pulse pattern becomes the pulse threshold value T th or more, the generation of the narrow pulse can be suppressed.
なお、図8には、パルス幅Tpwmと、発生するサージ電圧との関係を示すグラフである。このグラフにおいては、パルス幅Tpwmがx軸方向に示されており、発生するサージ電圧がy軸方向に示されている。また、この図によれば、電力変換器1の温度に応じて特性は変化し、電力変換器1が40℃、20℃、0℃、及び、−40℃の場合のそれぞれの特性が、実線、一点鎖線、二点鎖線、及び、破線で示されている。 Note that FIG. 8 is a graph showing the relationship between the pulse width T pwm and the generated surge voltage. In this graph, the pulse width T pwm is shown in the x-axis direction, and the generated surge voltage is shown in the y-axis direction. Further, according to this figure, the characteristics change according to the temperature of the power converter 1, and the respective characteristics when the power converter 1 is at 40 ° C., 20 ° C., 0 ° C., and −40 ° C. are shown by solid lines. , One-dot chain line, two-dot chain line, and dashed line.
例えば、パルス閾値Tthとして1.65μsを設定することにより、パルス幅Tpwmが1.65μs以上となり、その結果、これらのいずれの温度の場合においてもサージ電圧が発生しないようにできる。このようにして、電力変換器1の温度に応じたサージ電圧の特性を用いて、予め、ステップS108における判定基準を設定することができる。 For example, by setting the pulse threshold value T th to 1.65 μs, the pulse width T pwm becomes 1.65 μs or more, and as a result, the surge voltage can be prevented from being generated at any of these temperatures. In this way, the determination criteria in step S108 can be set in advance using the characteristics of the surge voltage according to the temperature of the power converter 1.
第1実施形態によれば、以下の効果を得ることができる。 According to the first embodiment, the following effects can be obtained.
第1実施形態の電力変換器1の制御方法によれば、電力変換器1と接続される負荷であるモータ3に対するトルク指令値T*に応じて、指令パルスパターンを切り替えるか否かを判断する切り替え判断ステップ(S104)と、切り替え判断ステップにおいて指令パルスパターンを切り替えると判断される場合に、切り替えタイミングである推定電気角θestをまたぐパルス幅Tpwmを推測するパルス幅推測ステップ(S107)と、パルス幅推測ステップにおいて推測されたパルス幅Tpwmが、パルス閾値Tthを上回るか否かを判定する、判定ステップ(S108)と、パルス幅Tpwmがパルス閾値Tthを上回ると判定される場合には(S108:Yes)、当該推定電気角θestにおいて指令パルスパターンを切り替える切り替えステップ(S109)と、を有する。 According to the control method of the power converter 1 of the first embodiment, it is determined whether or not to switch the command pulse pattern according to the torque command value T * for the motor 3 which is the load connected to the power converter 1. The switching determination step (S104) and the pulse width estimation step (S107) for estimating the pulse width T pwm across the estimated electric angle θ est , which is the switching timing, when it is determined to switch the command pulse pattern in the switching determination step. A determination step (S108) for determining whether or not the pulse width T pwm estimated in the pulse width estimation step exceeds the pulse threshold T th , and a determination that the pulse width T pw m exceeds the pulse threshold T th. In the case (S108: Yes), it has a switching step (S109) for switching the command pulse pattern at the estimated electric angle θ est.
このような構成となることで、パルス幅Tpwmがパルス閾値Tthよりも長い場合にのみ、指令パルスパターンの切り替えが行われることになるため、指令パルスパターンの切り替えが行われる過渡条件においても、狭小パルスの発生を防ぐことができる。 With such a configuration , the command pulse pattern is switched only when the pulse width T pwm is longer than the pulse threshold value T th. Therefore, even in a transient condition in which the command pulse pattern is switched. , It is possible to prevent the generation of narrow pulses.
さらに、パルス幅推測ステップ(S107)において、切り替えタイミングである推定電気角θestの直前における指令パルスパターンnの操作タイミング(θ1)と、推定電気角θestの直後における指令パルスパターンn+1の操作タイミング(θ2)との間に相当する時間を、パルス幅Tpwmとして推測する。これにより、推定電気角θestと、指令パルスパターンn、及び、指令パルスパターンn+1とを用いて、パルス幅Tpwmが推測される。このように、切り替えタイミングとなる推定電気角θestの再設定のために新たなセンサを追加する必要がないため、処理負荷が大きくなることなく、狭小パルスの発生を防ぐことができる。 Further, in the pulse width estimation step (S107), the operation timing (θ 1 ) of the command pulse pattern n immediately before the estimated electric angle θ est , which is the switching timing, and the operation of the command pulse pattern n + 1 immediately after the estimated electric angle θ est. The time corresponding to the timing (θ 2 ) is estimated as the pulse width T pwm. As a result, the pulse width T pwm is estimated using the estimated electric angle θ est , the command pulse pattern n, and the command pulse pattern n + 1. As described above, since it is not necessary to add a new sensor for resetting the estimated electric angle θ est , which is the switching timing, it is possible to prevent the generation of narrow pulses without increasing the processing load.
第1実施形態の電力変換器1の制御方法によれば、パルス幅Tpwmがパルス閾値Tthを上回るように、切り替えタイミングである推定電気角θestを再設定する第1再設定ステップ(S110)を有する。 According to the control method of the power converter 1 of the first embodiment, the first resetting step (S110) for resetting the estimated electric angle θ est , which is the switching timing, so that the pulse width T pwm exceeds the pulse threshold value T th. ).
このような構成となることで、パルス幅Tpwmがパルス閾値Tthよりも短い場合には、切り替えタイミングである推定電気角θestの再設定が行われ、パルス幅Tpwmがパルス閾値Tthを上回る。そのため、指令パルスパターンの切り替えが行われる過渡条件においても、狭小パルスの発生を防ぐことができる。 With such a configuration, when the pulse width T pwm is shorter than the pulse threshold value T th , the estimated electric angle θ est , which is the switching timing, is reset, and the pulse width T pw m is the pulse threshold value T th. Exceeds. Therefore, it is possible to prevent the generation of a narrow pulse even in a transient condition in which the command pulse pattern is switched.
第1実施形態の電力変換器1の制御方法によれば、再設定ステップ(S110)において、ステップS106において算出された推定電気角θestの後であって、次に、第1パルスパターンと、第2パルスパターンとにおいて導通状態が同じとなるタイミングを、推定電気角θestとして再設定する。 According to the control method of the power converter 1 of the first embodiment, in the resetting step (S110), after the estimated electric angle θ est calculated in step S106, then the first pulse pattern and The timing at which the conduction state becomes the same as that of the second pulse pattern is reset as the estimated electric angle θ est.
切り替えタイミングとなる推定電気角θestの後において、指令パルスパターンにおける導通状態が異なるタイミングを推定電気角θestとしてしまうと、推定電気角θestにおいて導通状態の変化が生じてしまい、パルス幅Tpwmがパルス閾値Tthを下回ってしまうことがある。しかしながら、導通状態が同じとなるタイミングを推定電気角θestとして再設定することで、パルス幅Tpwmがパルス閾値Tthを上回るようにできるため、狭小パルスの発生を防ぐことができる。 If the timing at which the conduction state in the command pulse pattern is different is set as the estimated electric angle θ est after the estimated electric angle θ est , which is the switching timing, the conduction state changes at the estimated electric angle θ est, and the pulse width T. The pwm may fall below the pulse threshold T th. However, by resetting the timing at which the conduction state becomes the same as the estimated electric angle θ est , the pulse width T pwm can be made to exceed the pulse threshold value T th , so that the occurrence of a narrow pulse can be prevented.
第1実施形態の電力変換器1の制御方法によれば、電力変換器1と接続される負荷はモータ3であり、PWM生成部141は、モータ3に対するトルク指令値T*、及び、モータ3の回転数Nに基づいて、パルスパターンを生成する。このような構成となることで、負荷がモータ3である場合においても、狭小パルスの発生を抑制することができる。
According to the control method of the power converter 1 of the first embodiment, the load connected to the power converter 1 is the
第1実施形態の電力変換器1の制御方法によれば、電力変換器1は、モータ3へと交流電力を出力する。そして、図3に示されるように、PWM生成部141によって行われる判断ステップ(S104)において、直流電力に対する交流電力の変調率M*、及び、モータ3の回転数Nに基づいて、指令パルスパターンを切り替えるか否かが判断される。
According to the control method of the power converter 1 of the first embodiment, the power converter 1 outputs AC power to the
さらに、パルス幅推測ステップ(S106)においては、推定電気角θestの直前における第1パルスパターンの導通状態が切り替わるタイミングを示すモータ3の電気角θ1、推定電気角θestの直後における第2パルスパターンの最初に導通状態が切り替わるタイミングを示すモータ3の電気角θ2、及び、モータ3の回転数Nに応じて、パルス幅Tpwmを推測する。
Further, in the pulse width guessing step (S106), the electrical angle theta 1 of the
このように制御されることにより、電力変換器1は、交流電力の出力先であるモータ3に関するパラメータに基づいて、パルス幅Tpwmがパルス閾値Tthを上回るように制御することにより、設計精度を高めながら、狭小パルスの発生を防ぐことができる。
By being controlled in this way, the power converter 1 controls the pulse width T pwm to exceed the pulse threshold T th based on the parameters related to the
第1実施形態の電力変換器1の制御方法によれば、パルス閾値Tthは、電力変換器1が有するスイッチング素子の温度に応じたサージ電圧特性により定められる。これにより、パルス閾値Tthを事前に求めることができるため、動作環境に応じて、狭小パルスの発生を防ぐことができる。 According to the control method of the power converter 1 of the first embodiment, the pulse threshold value T th is determined by the surge voltage characteristic according to the temperature of the switching element of the power converter 1. As a result, the pulse threshold value T th can be obtained in advance, so that the generation of a narrow pulse can be prevented depending on the operating environment.
(第2実施形態)
第1実施形態においては、推定電気角θestを算出する際に、モータ回転角度検出部において算出される回転数Nを用いる例について説明した。第2実施形態においては、モータ3の回転数Nが変化する場合において、指令パルスパターンが切り替わるタイミングにおけるモータ3の回転数Nを推定する例について説明する。
(Second Embodiment)
In the first embodiment, an example in which the rotation speed N calculated by the motor rotation angle detection unit is used when calculating the estimated electric angle θ est has been described. In the second embodiment, an example of estimating the rotation speed N of the
図9は、第2実施形態のPWMパターン切替出力部142の概略構成図である。図3に示される第1実施形態のPWMパターン切替出力部142と比較すると、角度推定部1421の前段に回転数推定部901が設けられている。
FIG. 9 is a schematic configuration diagram of the PWM pattern switching
回転数推定部901は、切り替えタイミングとなる制御周期T毎に回転数Nを記憶する。なお、以下においては、回転数Nnは、n回目の制御周期Tにおけるモータ3の回転数を示すものとする。
The rotation
回転数推定部901は、次式を用いて、次の切り替えタイミングにおける回転数Nn+1の推定値である推定回転数Nestを推定する。
The rotation
ただし、式(3)におけるパラメータは以下のとおりである。
Nn-1:前回(n−1回目)の切り替えタイミングにおける回転数N
Nn:今回(n回目)の切り替えタイミングにおける回転数N
Nest:次回(n+1回目)の切り替えタイミングにおける回転数Nの推定値
However, the parameters in the equation (3) are as follows.
N n-1 : Rotation speed N at the previous (n-1st) switching timing
N n : Rotation speed N at the current (nth) switching timing
N est : Estimated value of rotation speed N at the next (n + 1) switching timing
式(3)によれば、前回の切り替えタイミングから今回の切り替えタイミングまでにおける回転数Nの変化量が、今回の切り替えタイミングから次回の切り替えタイミングまでにおける回転数Nの変化量と等しいものと仮定して、次回の切り替えタイミングにおける回転数Nの推定値Nn+1が推定される。 According to equation (3), it is assumed that the amount of change in the number of revolutions N from the previous switching timing to the current switching timing is equal to the amount of change in the number of revolutions N from the current switching timing to the next switching timing. Therefore, the estimated value N n + 1 of the rotation speed N at the next switching timing is estimated.
図10は、最終指令パルスパターンの決定制御のフローチャートである。図5に示される第1実施形態のフローチャートと比較すると、ステップS106の処理が、ステップS202に変更されるとともに、ステップS201、S203、及び、S204の処理が追加されている。 FIG. 10 is a flowchart of determination control of the final command pulse pattern. Compared with the flowchart of the first embodiment shown in FIG. 5, the process of step S106 is changed to step S202, and the processes of steps S201, S203, and S204 are added.
ステップS201は、出力される指令パルスパターンの変更が必要な場合(S104:Yes)に行われる処理である。この処理においては、回転数推定部901は、(3)式に基づいて、次の変更タイミングにおける推定回転数Nestを算出する。そして、次に、ステップS202の処理が行われる。
Step S201 is a process performed when it is necessary to change the output command pulse pattern (S104: Yes). In this process, the rotation
ステップS202は、角度推定部1421は、現在の回転数Nと、推定回転数Nestとを比較し、大きい方の回転数を用いて、(1)式により推定電気角θestを算出する。この制御により、回転数Nが急減状態から定常状態に大きく変化した場合においても、より大きな回転数Nが使用されることになるので、パルス幅Tpwmはより短くなる。そのため、パルス幅Tpwmがパルス閾値Tth以上と判断されにくくなるので、パルス幅Tpwmが狭小パルスとなるおそれを低減することが抑制できる。
In step S202, the
なお、ステップS202において、角度推定部1421は、推定回転数Nestを用いて、(1)式により推定電気角θestを算出してもよい。このようにすることで、処理負荷を軽減できる。
In step S202, the
ステップS203においては、角度推定部1421は、推定電気角θestにおいて、前の指令パルスパターンでの導通状態と、次の指令パルスパターンでの導通状態とが同じであるか否かを判定する。両者が同じである場合には(S203:Yes)、次に、ステップS107が行われる。一方、両者が異なる場合には(S203:No)、次に、ステップS204が行われる。
In step S203, the
ステップS204において、角度推定部1421は、推定電気角θest以降において、現在の指令パルスパターンnの導通状態と、次の指令パルスパターンn+1の導通状態とが一致する電気角を、新たに、推定電気角θestとして再設定する。なお、本再設定処理は、ステップS110における再設定処理(第1再設定処理)と区別するために、第2再設定処理と称されてもよい。
In step S204, the
なお、ステップS204に相当する処理を、第1実施形態のように回転数Nの推定処理を含まない制御に含めてもよい。このようにすることで、推定電気角θestにおいて、現在の指令パルスパターンnと、次の指令パルスパターンnとの導通状態は同じにすることができるので、狭小パルスの発生を抑制できる。 The process corresponding to step S204 may be included in the control that does not include the estimation process of the rotation speed N as in the first embodiment. By doing so, at the estimated electric angle θ est , the conduction state between the current command pulse pattern n and the next command pulse pattern n can be made the same, so that the generation of narrow pulses can be suppressed.
次に、図11を用いて、本実施形態における指令パルスパターンの出力制御について説明する。これらの図には、それぞれ上から順に、現在出力中の指令パルスパターンn、PWM生成部141において生成される次の制御周期Tにおける指令パルスパターンn+1、及び、最終指令出力部1422から出力される最終指令パルスパターンが示されている。
Next, the output control of the command pulse pattern in the present embodiment will be described with reference to FIG. In these figures, in order from the top, the command pulse pattern n currently being output, the command pulse pattern n + 1 in the next control cycle T generated by the
図11においては、ステップS204において算出される推定電気角θestが指令パルスパターンの切り替えタイミングとなる。 In FIG. 11, the estimated electric angle θ est calculated in step S204 is the command pulse pattern switching timing.
この図に示されるように、最初にステップS106において算出される推定電気角θestにおいては、指令パルスパターンnの導通状態と、指令パルスパターンn+1の導通状態とは異なる(S203:No)、そのため、推定電気角θestの後であって、指令パルスパターンnの導通状態と、指令パルスパターンn+1の導通状態とが同じとなるタイミングが新たに推定電気角θestとして再設定される(S204)。 As shown in this figure, in the estimated electric angle θ est first calculated in step S106, the conduction state of the command pulse pattern n and the conduction state of the command pulse pattern n + 1 are different (S203: No), therefore. After the estimated electrical angle θ est, the timing at which the conduction state of the command pulse pattern n and the conduction state of the command pulse pattern n + 1 are the same is newly reset as the estimated electrical angle θ est (S204). ..
この場合において、上段に示されるように、再設定後の推定電気角θestの直前で指令パルスパターンnの導通状態が切り替わるとされる電気角θ1は、再設定後の推定電気角θestと一致する。また、中段において、再設定後の推定電気角θestの直後で指令パルスパターンn+1の導通状態が切り替わる電気角θ2が示されている。 In this case, as shown in the upper part, the electrical angle theta 1 which the conducting state of the command pulse pattern n in the previous estimated electrical angle theta est after resetting are switched, the estimated electrical angle after resetting theta est Matches with. Further, in the middle stage, the electric angle θ 2 at which the conduction state of the command pulse pattern n + 1 is switched immediately after the estimated electric angle θ est after resetting is shown.
ステップS107の処理によって、これらの電気角θ1、θ2に応じたパルス幅Tpwmが算出される。ここで、パルス幅Tpwmがパルス閾値Tth以上であるため(S108:Yes)、図下段に示されるように、推定電気角θestにおいて指令パルスパターンの変更が行われる。そのため、指令パルスパターンの切り替えタイミングを跨ぐパルス幅Tpwmが狭小パルスとなることを抑制できる。 By the process of step S107, the pulse width T pwm corresponding to these electric angles θ 1 and θ 2 is calculated. Here, since the pulse width T pwm is equal to or greater than the pulse threshold value T th (S108: Yes), the command pulse pattern is changed at the estimated electric angle θ est as shown in the lower part of the figure. Therefore, it is possible to prevent the pulse width T pwm that straddles the switching timing of the command pulse pattern from becoming a narrow pulse.
第2実施形態によれば、以下の効果を得ることができる。 According to the second embodiment, the following effects can be obtained.
第2実施形態の電力変換器1の制御方法によれば、制御周期Tごとの回転数Nの変化に基づいて、切り替えタイミングにおける回転数Nを推定する回転数推定ステップ(S201)を、さらに備える。パルス幅推測ステップ(S106)においては、回転数推定ステップにて推定された推定回転数Nestを用いて、パルス幅Tpwmを推定する。このような構成となることで、モータ3の回転数Nが急激に増加している場合においても、狭小パルスの発生を防ぐことができる。
According to the control method of the power converter 1 of the second embodiment, the rotation speed estimation step (S201) for estimating the rotation speed N at the switching timing based on the change of the rotation speed N for each control cycle T is further provided. .. In the pulse width estimation step (S106), the pulse width T pwm is estimated using the estimated rotation speed est estimated in the rotation speed estimation step. With such a configuration, it is possible to prevent the generation of a narrow pulse even when the rotation speed N of the
第2実施形態の電力変換器1の制御方法によれば、パルス幅推測ステップ(S202)において、回転数推定ステップ(S201)で推定された推定回転数Nest、及び、現在の回転数Nとのうちの大きい方を用いて、パルス幅Tpwmを推測する。このような構成となることで、パルス幅Tpwmがより短く算出されるので、パルス幅Tpwmがパルス閾値Tth以上と判断されにくくなり、パルス幅Tpwmが狭小パルスとなるおそれを低減することが抑制できる。 According to the control method of the power converter 1 of the second embodiment, in the pulse width estimation step (S202), the estimated rotation speed est estimated in the rotation speed estimation step (S201) and the current rotation speed N The larger of these is used to estimate the pulse width T pwm. By a such a configuration, since the pulse width T pwm is calculated shorter becomes the pulse width T pwm is hardly determined to pulse the threshold T th or more, the pulse width T pwm to reduce the possibility of a narrow pulse Can be suppressed.
第2実施形態の電力変換器1の制御方法によれば、回転数推定ステップ(S201)にて推定された推定回転数Nestを用いて算出される推定電気角θestにおいて、現在の指令パルスパターンと、次の指令パルスパターンが異なる場合には(S203:No)、現在の指令パルスパターンと、次の指令パルスパターンとにおいて導通状態が一致する電気角を、推定電気角θestとする第2再設定ステップ(S204)を有する。このように構成されることで、導通状態が同じとなるタイミングを推定電気角θestとして再設定することで、パルス幅Tpwmがパルス閾値Tthを上回るようになり、狭小パルスの発生を防ぐことができる。 According to the control method of the power converter 1 of the second embodiment, the current command pulse is obtained at the estimated electric angle θ est calculated by using the estimated rotation speed N est estimated in the rotation speed estimation step (S201). When the pattern and the next command pulse pattern are different (S203: No), the electric angle at which the current command pulse pattern and the next command pulse pattern have the same conduction state is defined as the estimated electric angle θ est . It has 2 reset steps (S204). With this configuration, by resetting the timing when the conduction state becomes the same as the estimated electrical angle θ est , the pulse width T pwm exceeds the pulse threshold value T th, and the occurrence of narrow pulses is prevented. be able to.
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例の一部を示したに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。また、上記実施形態は、適宜組み合わせ可能である。 Although the embodiments of the present invention have been described above, the above embodiments are only a part of the application examples of the present invention, and the technical scope of the present invention is limited to the specific configurations of the above embodiments. Absent. In addition, the above embodiments can be combined as appropriate.
1 電力変換器
3 モータ
6 電流センサ
10 制御装置
11 電流指令値演算部
12 電流制御部
13 変調率変換部
14 PWM出力部
141 PWM生成部
142 PWMパターン切替出力部
1421 角度推定部
1422 最終指令出力部
100 モータシステム
901 回転数推定部
1
Claims (10)
前記電力変換器と接続される負荷に対する制御指令値に応じて、前記パルスパターンを切り替えるか否かを判断する切り替え判断ステップと、
前記切り替え判断ステップにおいて、前記パルスパターンを切り替えると判断される場合に、切り替えタイミングの直前の第1パルスパターンにおける導通状態の変化タイミングと、前記切り替えタイミングの直後の第2パルスパターンにおける導通状態の変化タイミングとの間の時間を、前記切り替えタイミングをまたぐパルスのパルス幅として推測するパルス幅推測ステップと、
前記パルス幅推測ステップにおいて推測された前記パルス幅が、閾値を上回るか否かを判定する、判定ステップと、
前記判定ステップにおいて前記パルス幅が前記閾値を上回ると判定される場合には、前記切り替えタイミングにおいて、前記パルスパターンの切り替えを行う切り替えステップと、を有する、電力変換器の制御方法。 It is a control method of a power converter that converts DC power into AC power by changing the conduction state of a switching element by using PWM control according to a pulse pattern repeated in a predetermined control cycle.
A switching determination step for determining whether or not to switch the pulse pattern according to a control command value for a load connected to the power converter, and
When it is determined in the switching determination step that the pulse pattern is to be switched, the change timing of the conduction state in the first pulse pattern immediately before the switching timing and the change in the conduction state in the second pulse pattern immediately after the switching timing. A pulse width estimation step that estimates the time between the timings as the pulse width of the pulse that straddles the switching timing, and
A determination step for determining whether or not the pulse width estimated in the pulse width estimation step exceeds a threshold value.
A power converter control method comprising a switching step of switching the pulse pattern at the switching timing when the pulse width is determined to exceed the threshold value in the determination step.
前記判定ステップにおいて前記パルス幅が前記閾値を上回らないと判定される場合には、前記パルス幅が前記閾値を上回るように、前記切り替えタイミングを再設定する第1再設定ステップを、さらに有する、電力変換器の制御方法。 The power converter control method according to claim 1.
If it is determined in the determination step that the pulse width does not exceed the threshold, the power further includes a first reset step that resets the switching timing so that the pulse width exceeds the threshold. How to control the converter.
前記第1再設定ステップにおいて、前記切り替えタイミングの後に、前記第1パルスパターンと、前記第2パルスパターンとにおける導通状態が同じとなるタイミングを、前記切り替えタイミングとして再設定する、電力変換器の制御方法。 The power converter control method according to claim 2.
Control of the power converter in the first resetting step, after the switching timing, the timing at which the conduction state of the first pulse pattern and the second pulse pattern becomes the same is reset as the switching timing. Method.
前記切り替え判断ステップにおいて判断された前記切り替えタイミングにおいて、前記第1パルスパターンと、前記第2パルスパターンとの導通状態が異なる場合には、前記切り替えタイミングの後であって、前記第1パルスパターンと、前記第2パルスパターンとにおいて導通状態が同じとなるタイミングを、前記切り替えタイミングとして再設定する、第2再設定ステップを、さらに有する、電力変換器の制御方法。 The power converter control method according to any one of claims 1 to 3.
If the conduction state between the first pulse pattern and the second pulse pattern is different at the switching timing determined in the switching determination step, it is after the switching timing and with the first pulse pattern. A power converter control method further comprising a second resetting step of resetting the timing at which the conduction state becomes the same as that of the second pulse pattern as the switching timing.
前記負荷は、モータであり、
前記モータに対するトルク指令値、及び、前記モータの回転数に基づいて、前記パルスパターンを決定するパルスパターン決定ステップを、さらに備える、電力変換器の制御方法。 The power converter control method according to any one of claims 1 to 4.
The load is a motor
A power converter control method further comprising a pulse pattern determination step of determining the pulse pattern based on a torque command value for the motor and a rotation speed of the motor.
前記切り替え判断ステップにおいて、前記電力変換器における前記直流電力に対する前記交流電力の変調率、及び、前記回転数に基づいて、パルスパターンを切り替えるか否かを判断する、電力変換器の制御方法。 The power converter control method according to claim 5.
A power converter control method for determining whether or not to switch a pulse pattern based on the modulation factor of the AC power with respect to the DC power in the power converter and the rotation speed in the switching determination step.
前記制御周期ごとの前記回転数の変化に基づいて、前記切り替えタイミングにおける前記回転数を推定する回転数推定ステップを、さらに備え、
前記パルス幅推測ステップにおいて、前記回転数推定ステップにて推定された推定回転数を前記回転数として用いて、パルス幅を推測する、電力変換器の制御方法。 The power converter control method according to claim 5 or 6.
A rotation speed estimation step for estimating the rotation speed at the switching timing based on the change in the rotation speed for each control cycle is further provided.
A power converter control method for estimating a pulse width by using the estimated rotation speed estimated in the rotation speed estimation step as the rotation speed in the pulse width estimation step.
前記制御周期ごとの前記回転数の変化に基づいて、前記切り替えタイミングにおける前記回転数を推定する回転数推定ステップを、さらに備え、
パルス幅推測ステップにおいて、前記回転数推定ステップで推定された推定回転数、及び、現在の前記回転数とのうちの大きい方を、前記回転数として用いて、パルス幅を推測する、電力変換器の制御方法。 The power converter control method according to claim 5 or 6.
A rotation speed estimation step for estimating the rotation speed at the switching timing based on the change in the rotation speed for each control cycle is further provided.
In the pulse width estimation step, a power converter that estimates the pulse width by using the larger of the estimated rotation speed estimated in the rotation speed estimation step and the current rotation speed as the rotation speed. Control method.
閾値は、前記スイッチング素子の温度に応じたサージ電圧の特性により定められる、電力変換器の制御方法。 The power converter control method according to any one of claims 1 to 8.
The threshold value is a control method for a power converter, which is determined by the characteristics of a surge voltage according to the temperature of the switching element.
前記制御装置は、
前記電力変換器と接続される負荷に対する制御指令値に応じて、前記パルスパターンを切り替えるか否かを判断し、
前記パルスパターンを切り替えると判断される場合に、切り替えタイミングの直前の第1パルスパターンにおける導通状態の変化タイミングと、前記切り替えタイミングの直後の第2パルスパターンにおける導通状態の変化タイミングとの間の時間を、前記切り替えタイミングをまたぐパルスのパルス幅として推測し、
推測された前記パルス幅が、閾値を上回るか否かを判定し、
前記パルス幅が前記閾値を上回ると判定される場合には、前記切り替えタイミングにおいて、前記パルスパターンの切り替えを行う、電力変換器の制御装置。 A power converter control device that converts DC power into AC power by changing the conduction state of the switching element using PWM control according to a pulse pattern that is repeated in a predetermined control cycle.
The control device is
It is determined whether or not to switch the pulse pattern according to the control command value for the load connected to the power converter.
When it is determined to switch the pulse pattern, the time between the change timing of the conduction state in the first pulse pattern immediately before the switching timing and the change timing of the conduction state in the second pulse pattern immediately after the switching timing. Is estimated as the pulse width of the pulse that straddles the switching timing.
It is determined whether or not the estimated pulse width exceeds the threshold value.
A control device for a power converter that switches the pulse pattern at the switching timing when it is determined that the pulse width exceeds the threshold value.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019190524A JP7347111B2 (en) | 2019-10-17 | 2019-10-17 | Power converter control method and power converter control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019190524A JP7347111B2 (en) | 2019-10-17 | 2019-10-17 | Power converter control method and power converter control device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021069138A true JP2021069138A (en) | 2021-04-30 |
| JP7347111B2 JP7347111B2 (en) | 2023-09-20 |
Family
ID=75637614
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019190524A Active JP7347111B2 (en) | 2019-10-17 | 2019-10-17 | Power converter control method and power converter control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7347111B2 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014143831A (en) * | 2013-01-24 | 2014-08-07 | Mitsubishi Electric Corp | Power conversion device |
| JP2015208203A (en) * | 2014-04-23 | 2015-11-19 | 株式会社デンソー | Switching controller |
| JP2017147891A (en) * | 2016-02-18 | 2017-08-24 | 株式会社デンソー | Inverter control device |
-
2019
- 2019-10-17 JP JP2019190524A patent/JP7347111B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014143831A (en) * | 2013-01-24 | 2014-08-07 | Mitsubishi Electric Corp | Power conversion device |
| JP2015208203A (en) * | 2014-04-23 | 2015-11-19 | 株式会社デンソー | Switching controller |
| JP2017147891A (en) * | 2016-02-18 | 2017-08-24 | 株式会社デンソー | Inverter control device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7347111B2 (en) | 2023-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6555186B2 (en) | AC motor control device | |
| US9698712B2 (en) | Inverter apparatus | |
| CN106026820B (en) | Method and system for automatically tuning motor parameters | |
| JP2019193445A (en) | Motor drive device | |
| JP6950734B2 (en) | Current detector | |
| US10886868B2 (en) | Motor control apparatus, control method thereof, and program | |
| KR101907368B1 (en) | Power control method and power control device | |
| JP2013034334A (en) | Controller for rotary machine | |
| US11374505B2 (en) | Inverter device for performing a power conversion operation to convert DC power to AC power | |
| JP7347111B2 (en) | Power converter control method and power converter control device | |
| CN113454902A (en) | Motor drive device and air conditioner | |
| JP2017205017A (en) | Motor control device of air conditioner, and air conditioner | |
| JP2007252056A (en) | Controller and control method of motor | |
| JP6717048B2 (en) | Device for supplying voltage to electric motor and control method thereof | |
| CN108370231B (en) | Motor control device | |
| JP6471670B2 (en) | Power control method and power control apparatus | |
| US12095373B2 (en) | Power conversion apparatus | |
| JP4284585B2 (en) | Control method of voltage source inverter | |
| JP2011015535A (en) | Motor control system | |
| JP2006271159A (en) | Dielectric breakdown detector for electric motor winding | |
| JP6772844B2 (en) | AC motor control device | |
| JPH11113300A (en) | Induction motor controller | |
| JP6540586B2 (en) | Control device for AC motor | |
| JP2016178797A (en) | Control device for rotary electric machine | |
| JP5585224B2 (en) | Rotating machine control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220802 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230721 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230821 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7347111 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |