JP2020521248A - 二部メモリスタネットワークにおける深層学習 - Google Patents
二部メモリスタネットワークにおける深層学習 Download PDFInfo
- Publication number
- JP2020521248A JP2020521248A JP2019564492A JP2019564492A JP2020521248A JP 2020521248 A JP2020521248 A JP 2020521248A JP 2019564492 A JP2019564492 A JP 2019564492A JP 2019564492 A JP2019564492 A JP 2019564492A JP 2020521248 A JP2020521248 A JP 2020521248A
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- current
- error delta
- input
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/049—Temporal neural networks, e.g. delay elements, oscillating neurons or pulsed inputs
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/06—Physical realisation, i.e. hardware implementation of neural networks, neurons or parts of neurons
- G06N3/063—Physical realisation, i.e. hardware implementation of neural networks, neurons or parts of neurons using electronic means
- G06N3/065—Analogue means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/084—Backpropagation, e.g. using gradient descent
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/04—Inference or reasoning models
- G06N5/046—Forward inferencing; Production systems
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11C—STATIC STORES
- G11C13/00—Digital stores characterised by the use of storage elements not covered by groups G11C11/00, G11C23/00, or G11C25/00
- G11C13/0002—Digital stores characterised by the use of storage elements not covered by groups G11C11/00, G11C23/00, or G11C25/00 using resistive RAM [RRAM] elements
- G11C13/0021—Auxiliary circuits
- G11C13/0069—Writing or programming circuits or methods
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11C—STATIC STORES
- G11C13/00—Digital stores characterised by the use of storage elements not covered by groups G11C11/00, G11C23/00, or G11C25/00
- G11C13/0002—Digital stores characterised by the use of storage elements not covered by groups G11C11/00, G11C23/00, or G11C25/00 using resistive RAM [RRAM] elements
- G11C13/0021—Auxiliary circuits
- G11C13/0069—Writing or programming circuits or methods
- G11C2013/0073—Write using bi-directional cell biasing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Computing Systems (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Data Mining & Analysis (AREA)
- Computational Linguistics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Neurology (AREA)
- Micromachines (AREA)
- Semiconductor Integrated Circuits (AREA)
- Measurement Of Current Or Voltage (AREA)
- Control Of Voltage And Current In General (AREA)
- Measurement Of Resistance Or Impedance (AREA)
Abstract
本明細書では、二部メモリスタネットワーク及びそれらのネットワークを訓練させる方法が記載される。一例のケースでは、メモリスタネットワークは複数のナノファイバを含み、各ナノファイバは金属コア及びメモリスタシェルを備える。メモリスタネットワークはナノファイバ上に配置された複数の電極も備え得る。複数の電極の第1のセットはメモリスタネットワーク内の複数の入力電極を含み、複数の電極の第2のセットはメモリスタネットワーク内の複数の出力電極を含み得る。メモリスタネットワークは、二部メモリスタネットワークとして実施され、本明細書に記載の訓練方法により訓練され得る。
Description
[関連出願への相互参照]
本出願は、2017年5月22日に出願された米国仮出願第62/509423号に基づく優先権を主張し、その内容の全体は参照により本明細書に組み込まれる。
本出願は、2017年5月22日に出願された米国仮出願第62/509423号に基づく優先権を主張し、その内容の全体は参照により本明細書に組み込まれる。
メモリスタは、受動的な非線形の2端子電子素子である。メモリスタにおいて、デバイスの電気抵抗は、直前までにデバイスに流れていた電流(又はデバイスに印加されていた電圧)の履歴に依存する。従って、電位差又は電圧降下を加えることにより、メモリスタの抵抗を徐々に変化させることができる。この電圧降下が除去されると、メモリスタは現在の抵抗値を保持する。電圧降下の極性が逆になると、抵抗の変化は逆向きになる。
特定の回路構成において、メモリスタは、そのコンダクタンスに等しい重みを有する人工シナプスとして機能し得る。重みの強さは、メモリスタの電圧降下を制御することにより、時間の経過とともに変化させられる。典型的には、メモリスタはしきい値電圧降下を有し、それ以下の電圧ではコンダクタンスの変化が発生しない。
シナプスネットワークへのメモリスタの使用は、ニューロモーフィック回路開発の分野で有望なアプローチとして提案されている。メモリスタは、シナプス前及びシナプス後の電圧制御用の相補型金属酸化膜半導体(CMOS)ベースの回路を備えるクロスバーシナプスネットワークに組み込まれている。これらの回路は、CMOSベースの電圧制御及び電流制御を用いて、メモリスタの抵抗またはインピーダンス(例えばメモリ)の変化を生成できることを示す。
メモリスタニューラルネットワークでは、入力はメモリスタのネットワーク内の電極セットへの電圧として表され得る。ネットワーク内の別の電極セットでは、電圧又は電流が読み出される。これらは、ニューラルネットワークの出力と見なされる。このようなメモリスタニューラルネットワークにおける学習の目的は、コスト関数又は誤差関数を最小化させるために、メモリスタのコンダクタンスを変更することである。
ある実施例には、いくつかの入力ノード及びいくつかの出力ノードを有するメモリスタネットワークを訓練する方法が含まれる。メモリスタネットワークは、二部メモリスタネットワークを含むことができ、かつ、この方法は、メモリスタネットワークを訓練するための逆伝播アルゴリズムを再現することができる。
ある例では、方法は、複数の入力ノードのうちの1つの入力ノードに入力電圧又は入力電流を印加するステップと、複数の出力ノードのうちの1つの出力ノードを接地するステップと、出力ノードにおいて出力電流または出力電圧を計測するステップと、出力電流又は出力電圧を目標電流又は目標電圧と比較して誤差デルタを決定するステップと、誤差デルタの強度に比例した期間の間、出力ノードにしきい値電圧又はしきい値電流を印加するステップとを含む。
誤差デルタが負値の場合、方法は、誤差デルタに比例する期間の間、出力ノードに正値のしきい値電圧又はしきい値電流を印加するステップと、誤差デルタに比例する期間の間、出力ノードに負値のしきい値電圧又はしきい値電流を印加するステップとも含み得る。誤差デルタが正値の場合、方法は、入力ノードに印加される入力電圧又は入力電流の極性を逆転させるステップと、誤差デルタに比例する期間の間、正値のしきい値電圧又はしきい値電流を出力ノードに印加するステップと、誤差デルタに比例する期間の間、出力ノードに負値のしきい値電圧又はしきい値電流を印加するステップとも含み得る。
他の態様では、方法は、誤差デルタを誤差デルタ電圧又は誤差デルタ電流に変換するステップと、出力ノードに誤差デルタ電圧又は誤差デルタ電流を印加するステップと、誤差デルタ電圧又は誤差デルタ電流の絶対値に比例する第2の期間の間、入力ノードにしきい値電圧又はしきい値電流を印加するステップとをさらに含み得る。
入力ノードに印加される入力電圧又は入力電流が正値である場合、方法は、誤差デルタ電圧又は誤差デルタ電流の絶対値に比例する第2の期間の間、入力ノードに正値のしきい値電圧又はしきい値電流を印加するステップと、誤差デルタ電圧又は誤差デルタ電流の絶対値に比例する第2の期間の間、入力ノードに負値のしきい値電圧又はしきい値電流を印加するステップとを含み得る。入力ノードに印加される入力電圧又は入力電流が負値である場合、方法は、出力ノードに印加される誤差デルタ電圧又は誤差デルタ電流の極性を逆転させるステップと、誤差デルタ電圧又は誤差デルタ電流の絶対値に比例する第2の期間の間、入力ノードに正値のしきい値電圧又はしきい値電流を印加するステップと、誤差デルタ電圧又は誤差デルタ電流に比例する第2の期間の間、入力ノードに負値のしきい値電圧又はしきい値電流を印加するステップとをさらに含み得る。
別の実施形態、メモリスタネットワークは、複数のナノファイバと、複数のナノファイバ上に配置された複数の電極と、訓練プロセッサとを含み、各ナノファイバは金属コアとメモリスタシェルを含み、複数の電極は複数の入力ノードと複数の出力ノードとを含む。
訓練プロセッサは、複数の入力ノードのうちの1つの入力ノードに入力電圧又は入力電流を印加し、複数の出力ノードのうちの1つの出力ノードを接地し、出力ノードにおける出力電流又は出力電圧を計測し、出力電流または出力電圧を目標電流又は目標電圧と比較して誤差デルタを決定し、及び、誤差デルタの大きさに比例する期間の間、出力ノードにしきい値電圧又はしきい値電流を印加するように構成され得る。
本開示の多くの態様は、以下の図面を参照することでよりよく理解され得る。図面の構成要素は必ずしも縮尺通りに描かれているわけではなく、代わりに本開示の原理を明確に示すことに重点が置かれている。図面では、いくつかの図を通して、同様の符号は対応する部分を示す。
上述の通り、メモリスタは、そのコンダクタンスと等しい重みを持つ人工シナプスとして機能し得る。重みの大きさは、メモリスタの電圧降下を制御することにより、時間の経過とともに変更され得る。典型的には、メモリスタはしきい値電圧降下を持ち、それ以下の電圧降下ではコンダクタンスの変化は発生しない。
メモリスタニューラルネットワークでは、入力は、メモリスタのネットワークにおける電極セットへの電圧として表され得る。ネットワーク内の個別の電極セットにおいて、電圧又は電流が読み出される。これらは、ニューラルネットワークの出力と見なされる。このようなメモリスタニューラルネットワークにおける学習の目標は、メモリスタのコンダクタンスを変更してコスト関数又は誤差関数を最小化させることである。
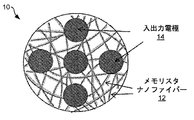
本明細書に記載の概念は、二部メモリスタネットワークと、そのようなネットワークに学習させる方法とを対象とする。ある例では、メモリスタネットワークは、複数のナノファイバを含み、各ナノファイバは、導電性コア若しくは金属コア及びメモリスタシェルを含む。メモリスタネットワークは、ナノファイバ上に配置された複数の電極も含み得る。複数の電極の第1のセットは、メモリスタネットワークに入力電極を含んでよく、複数の電極の第2のセットは、メモリスタネットワークに出力電極も含み得る。メモリスタネットワークは、二部メモリスタネットワークとして実装され、本明細書に記載の学習方法に従って訓練され得る。本明細書に記載の概念は、(例えば、ナノファイバを用いるもの以外の、)二部メモリスタネットワークの他の形式及び構造に適用可能である。さらに、図面は、ネットワーク、電極等の例を複数示すが、本明細書に記載の概念は、二部メモリスタネットワークの他の形態、構造、及びサイズにも適用され得る。
図1Aは、本明細書に記載の様々な実施形態に係る、メモリスタナノファイバニューラルネットワーク10のネットワークアーキテクチャの例を示す。以下でさらに詳細に記載する通り、ニューラルネットワーク10は、二部メモリスタネットワークの形をとる。ニューラルネットワーク10では、複数のメモリスタナノファイバ12(「複数のナノファイバ12」又は「ナノファイバ12」)が基板上に無作為に配置され、入出力電極14のセットがナノファイバ12の上に配置される。
図1Bは、図1Aに示されるニューラルネットワーク10におけるメモリスタナノファイバ12と入出力電極14との間の接続の例を示す。図1Bに示されるように、ナノファイバ12の各々は、導電性コア又は金属コア12A及びメモリスタシェル12Bを含む。さらに、電極14及びナノファイバ12の間の各接合部では、メモリスタシナプス16が形成される。
ニューラルネットワーク10は、適合する任意のやり方で形成されることができ、このやり方には例えば次のような方法が含まれる。すなわち、参照により内容の全体が本明細書に組み込まれる、発明の名称が「メモリスタナノファイバニューラルネットワーク」である米国非仮特許出願第15/383527号に記載の方法が含まれる。例えば、ナノファイバ12の導電性コア12Aは、チタンイソプロポキシドの前駆体、チタンブトキシトの前駆体、又は別の適切な前駆体を用いて、ドープ二酸化チタン(TiO2)から形成され得る。メモリスタシェル12Bは、メモリスタ材料で導電性コア12Aの外周シェルを電界紡糸することにより、導電性金属コア12Aの周りに形成され得る。
図1Cは、図1Aに示されるニューラルネットワーク10の一部の等価回路の例を示す図である。ニューラルネットワーク10内で互いに重なり合いかつ互いに接触するとき、2つのナノファイバ12の間の界面抵抗は、電極14とナノファイバ12との間の抵抗よりもはるかに高くなり得る。これは、複数のナノファイバ12のうちの2つの間の接触面積が通常は非常に小さく、かつこの接触点が2つの絶縁メモリスタシェル12Bの間に存在するためである。対照的に、各電極14は、各ナノファイバ12のメモリスタシェル12Bのより長い長さ又は部分に接触し、かつ電圧降下は、2つのナノファイバ12の間の2つのメモリスタシェル12Bではなく、1つのメモリスタシェル12Bのみにかかる。
図2は、二部メモリスタネットワーク20並びに二部メモリスタネットワーク20の代替のフィードフォワード形態30の例を示す図である。図1Aの電極14は、図2において外部電極と呼ばれ、メモリスタシェル12Bを介してナノファイバ12の導電性金属コア12Aに接続される。電極14同士は互いに直接接続されていない。ナノファイバ12の導電性金属コア12Aは内部電極と呼ばれ、メモリスタシェル12Bを介して外部電極14に接続される。
二部メモリスタネットワーク20の代替のフィードフォワード形態30では、電極14は、複数の入力電極14Aと複数の出力電極14Bに分離される。複数のナノファイバ12が電気的に互いに効果的に絶縁又は隔離されているとすると、二部メモリスタネットワーク20のフィードフォワード形態30は、図に示すように二部グラフの形をとる。
従って、外部電極14が入力電極14Aと出力電極14Bに分割又は分離されると、二部メモリスタネットワーク20の代替のフィードフォワード形態30は、3層フィードフォワードニューラルネットワークとして動作し得る。より多くの隠れ層が必要ならば、そのような複数のネットワーク(例えばフィードフォワード形態30に類似のもの)がともにリンクされ得る。二部メモリスタネットワーク20の代替のフィードフォワード形態30(「フィードフォワードネットワーク30」とも呼ぶ)を学習させるアプローチは、以下でさらに詳細に記載される。
フィードフォワードネットワーク30の動作を決定するために、キルヒホッフの法則を用いてメモリスタシェル12B(若しくは以下に記載のように単に「メモリスタ」)での電圧降下を決定できる。電圧が降下し、フィードフォワードネットワーク30を通る電流が識別されると、適切なメモリスタモデルが適用され、これらのメモリスタのコンダクタンスを経時的に変更する方法を決定し得る。
第一に、出力のコンダクタンスを内部ノードの重みに変更する手順が進展され得る。フィードフォワードネットワーク30への入力電圧が−VT/2からVT/2までの間の電圧で表されるとき、いかなるメモリスタにおいても最大電圧降下がVTを超えないため、いかなるメモリスタコンダクタンスの変化も回避される。次に、フィードフォワードネットワーク30の出力は、電圧がグランドに保たれている出力ノードにおける電流として読み取られていることが仮定され得る。
任意の内部ノードへの合計の入力電流はゼロになる(すなわち、キルヒホッフの電流法則に従う)ため、次の方程式が成り立つ。

ここで、Gijは、外部ノードiを内部ノードjに接続するメモリスタの瞬間的なコンダクタンスであり、総和は全ての外部ノード(すなわち、入力ノード及び出力ノード)にまたがって行われる。
式(1)は、以下に示すように、内部ノードjにおける電圧について解くように調整され得る。加算は線形であり、Vjはインデックスにiを含まないため、以下の式が成り立つ。
式(5)において、次の正規化係数Gjは、電圧又は電流の瞬間値に依存しない。
正規化係数Gjは、フィードフォワードネットワーク30の動作に大きな影響を与えない。全ての出力ノードが接地されたままであれば(すなわち、Vi=0であれば)、総和への寄与は入力ノードの寄与のみである。従って、内部ノードの電圧は、コンダクタンスの行列を正規化係数で除算することによる入力の線形変換と判断され得る。
同様に、出力ノードkにおける電流は、内部ノードにおける電圧を用いて解くことができる。出力ノードは全て接地されているため、電流は次式で表される。
これは、コンダクタンスの行列による隠れ層ノードの線形変換である。この電流は外部回路からアクセス可能のため、この総和に対してさらに非線形変換が行われ、ネットワークが非線形の出力層を持つことができる。しかしながら、学習アルゴリズムの導出を簡単にするために、全ての層は線形であると仮定され得る。
フィードフォワードネットワーク30においてメモリスタ接続を有する3層ニューラルネットワークの例が記載され示されたため、そのようなネットワークを訓練するために適切なアルゴリズムが必要である。この目的のために、ネットワークの訓練に適した逆伝播アルゴリズムの近似について記載する。
図3は、本明細書に記載の様々な実施形態に係る、しきい値VTを有するメモリスタの線形モデルの例を示す図である。最初に、内部ノード及び出力ノードの間の重みが考慮される。これは、これらの重みは学習のためにデルタルールのみを必要とするからである。このネットワーク内の線形ニューロンに対して、デルタルールは以下のように表される。
ここで、Tkは所望の出力電流であり、Ikは計測された出力電流であり、Vjは内部ノードjに印加された電圧であり、αは学習率である。
直感的に、もし誤差デルタ(Tk−Ik)が正値であれば、電流Ikを増加させて誤差を減少させることが望ましい。これは、正値の内部ノードへの接続を強くし、負値の内部ノードへの接続を弱めることにより達成できる。誤差デルタが負値であれば、その逆が成り立つ。デルタルールの形式は、誤差デルタ及び内部ノードの活性化の両方が線形となるようなものである。しきい値VTを伴う線形ニューロンであるとすると、次式はコンダクタンスの変化の形式に関するものである。
式(8)において、αは学習率に類似するものであり、ΔVはメモリスタにおける電圧降下であり、tは電圧が印加される時間長である。上述の式のうち時間長を除く値のグラフが図3に示される。式(8)は、しきい値を伴うメモリスタに対する単純なモデルであり、学習アルゴリズムを導出するにあたって用いられ得る。しかしながら、ノイズを伴うものを含む他のメモリスタモデルも、上述の導出されるアルゴリズムにより機能する。
誤差デルタ(Tk−Ik)は、外部回路による測定のために利用可能であるため、時間長tはこの誤差デルタの大きさに比例するように設定され得る。その結果生じるメモリスタGkjのコンダクタンスの変化は、以下で記載するように、内部ノードjにおける電圧Vjに比例するようにもできる。
内部ノード(例えば導電性コア12A)の電圧を直接変更できず、不明となる場合がある。ただし、入力及び/又は出力における電圧及び/又は電流は直接計測できる。初期では出力はすべて接地されているため、1つの出力に関する電圧を変更すると、内部ノードの電圧が乱れる。ただし、多くの入出力が提供される場合、これはわずかな乱れにとどまる。
出力ノードが選択され、電圧がVTに設定されている場合を考える。Vjは正値であるため、定義によると、電圧降下(VT−Vj)はVT未満となる。従って、正値の電圧(+Vj)を有する全ての内部ノードへの接続は、コンダクタンスを変化させることはない。これにより、電圧降下がVTよりも大きい負値のVjにより内部ノードが分離される。また、負値の内部ノードの各々における電圧降下は次式に等しい。
従って、次式が成り立つ。
従って、コンダクタンスの変化を導く量、すなわちΔG∝(ΔV−VT)は、Vjに比例する。誤差デルタが負値であれば、電流はさらに負値となる。従って、負値の電圧により内部ノードへの接続を強くすることが望ましい。上述の、ΔV>VTが成り立つ場合では、出力ノードへのVTの印加は、全ての負値の内部ノードへのコンダクタンスを、各ノードのVjに比例する量だけ増加させる。この電圧が出力ノードに、誤差デルタに比例する時間tの間印加されると仮定すると、デルタルール、すなわち等式ΔGkj=α(Tk−Ik)Vjは、この接続のセットのために再構築され得る。
時間tにわたる+VTの印加の後、電圧−VTを印加することにより、この出力ノードに接続された正値の内部ノードにもこのことは拡張できる。負値の電圧を持つ全ての内部ノードにおける電圧降下(−VT−Vj)は、コンダクタンスの変化のしきい値を下回り、正値のVjを持つ内部ノードを効果的に分離する。同様の理由で、これらの正値の内部ノードにおけるコンダクタンスの変化の大きさは、各内部ノードにおける電圧にも比例し、変化の方向は、コンダクタンスを増加させる方向ではなく、減少させる方向である。繰り返しになるが、これは負値の誤差デルタを有する出力ノードに必要とされるものである。
正値の誤差デルタを持つ出力を考慮するために、これらのコンダクタンス変化の方向は逆転され得る。特に、負値の内部ノードへの接続を弱め、正値の内部ノードへの接続を強めることができる。これは、すべての入力の電圧極性を逆転させ(て、すべての内部ノードの符号を逆転させ)ることにより、上述のものと同じ手順で実行され得る。これにより、各メモリスタの電圧降下の方向が逆転する。
次に、内部ノードへの入力重みのコンダクタンスを変化させるための手順が進展される。入力電圧は−VT/2とVT/2との間に制限されているため、入力ノードから内部ノードへの最大電圧降下がVTを超えることはなく、これらの重みは出力重みの訓練中に変更できなかった。
逆伝播アルゴリズムの逆伝播ステップは、次式で与えられる。
誤差デルタに比例する中心項の代わりに、これは誤差デルタの重み付き総和に等しくなる。これは、内部ノードjの「誤差への寄与」である。右辺の項は入力における電圧であり、測定のためにアクセス可能である。時間長tは、この入力Viの絶対値に比例するようにできる。
これにより、上記の重み付き総和は、内部ノードjの電圧として再現され得る。また、この電圧に比例してコンダクタンスを変更するように、同じ上述の方法が適用され得る。
誤差デルタ(Tk−Ik)を取得して電圧に変換する場合、これらの電圧を出力ノードに配置し、入力ノードを接地することで、この重み付き総和を実現できる。各内部ノードの誤差への結果として生じる寄与は、正規化係数Gjまでは正確であり、これも学習プロセスに大きな影響を与えない。
正値の入力を伴う入力ノードに電圧VTを印加することにより、その入力ノードに接続する負値の電圧を伴う全ノードへのコンダクタンスを選択的に強めて、これらの内部ノードの誤差への寄与を減少させることができる。同様に、電圧−VTを印加すると、正値の電圧を持つ全ノードへのコンダクタンスを選択的に弱めることとなり、やはりこれらのノードの誤差への寄与を減少させることになる。全ての誤差デルタの符号を逆転させると、負値の入力を持つ入力ノードも同様に処理できる。
図4は、本明細書に記載の様々な実施形態に係る、図2に示すフィードフォワードネットワーク30を訓練するための訓練プロセッサ110の例を示す図である。訓練プロセッサ110は、データストア120と、インタフェースモジュール130と、測定モジュール140と、及び訓練モジュール150とを含む。データストア120は、訓練データ122及びネットワークデータ124を含む様々な種類のデータを格納する。訓練データ122は、フィードフォワードネットワーク30を訓練するための訓練モジュール150に依存されることがある。例えば、訓練データ122は、フィードフォワードネットワーク30内の内部ノード(例えば導電性金属コア12A)及び出力ノード(例えば入力電極14A及び/又は出力電極14B)の間の目標重みを定義するデータを含み得る。従って、訓練データ122は、フィードフォワードネットワーク30のメモリスタシェル12Bの各々にプログラムされるコンダクタンスの目標レベル又は目標値を定義することができる。訓練データ122は、ネットワークを訓練する任意の目的のために、訓練に適した任意のモデルに基づき得る。
ネットワークデータ124は、導電性金属コア12A、入力電極14A、及び出力電極14Bの間の接続といった、フィードフォワードネットワーク30のネットワークストラクチャを定義するデータを含み得る。従って、ネットワークデータ124は、図4に示す導電性金属コア12A、入力電極14A、及び出力電極14Bの間のメモリスタシェル12Bにより形成されるメモリスタ接続を定義し得る。訓練モジュール150は、ネットワークデータ124を参照し、フィードフォワードネットワーク30の訓練に用いるステップの適切なシーケンスを決定できる。
インタフェースモジュール130は、入力電極14A及び出力電極14Bとの電気的インタフェースを提供するための1つ以上の回路を含み得る。例えば、インタフェースモジュール130は、1つ以上の入力電極14A及び/又は出力電極14Bに、入力電圧及び/又は入力電流を提供することができる回路を含み得る。インタフェースモジュール130は、1つ以上の入力電極14A及び/又は出力電極14Bを接地させることができる回路を含み得る。また、インタフェースモジュール130は、入力電極14A及び/又は出力電極14Bの1つ以上において、電圧及び/又は電流を読み取ることができる回路を含み得る。
測定モジュール140は、1つ以上の入力電極14A及び/又は出力電極14Bで測定を行う1つ以上の回路を含み得る。例えば、測定モジュール140は、入力電極14A及び/又は出力電極14Bのうちの1つ以上で電圧及び/又は電流を測定できる。また、測定モジュール140は、測定値と目標値との差を決定するために、様々な電圧、電流等の間の差を計算し得る。インタフェースモジュール130及び測定モジュール140の両方は、メモリを備えるアナログ回路及び/又はデジタル回路の任意の適切なネットワークとして実施され得る。当該アナログ回路及び/又はデジタル回路は、アンプと、フィルタと、処理回路とを含む。
訓練モジュール150は、図5A、図5B、図5Cに示されるメモリスタネットワーク訓練プロセスを実行することができる処理回路として実施され得る。その文脈において、訓練モジュール150は、入力ノード14Aと内部ノードの導電性コア12Aとの間のコンダクタンス又は重みを訓練するようにインタフェースモジュール130に指示することができる。訓練モジュール150は、内部ノードの導電性コア12Aと出力電極14Bとの間のコンダクタンス又は重みを訓練するようにインタフェースモジュール130に指示することもできる。
実用的な意味では、フィードフォワードネットワーク30の内部構造(例えば入力電極14A、出力電極14B、及び導電性コア12Aの間のメモリスタシェル12B接続の個別の接続及び/又はコンダクタンス)が不明の場合がある。従って、訓練モジュール150により実行されるアルゴリズムは、訓練プロセスを暗に実行するように設計される。フィードフォワードネットワーク30を訓練することにより、訓練モジュール150は、入力電極14Aと導電性コア12Aとの間、並びに出力電極14Bと導電性コア12Aとの間の経路のセットを、効果的に自己組織化する。これらの経路は、入力電極14A、出力電極14B、及び導電性コア12Aの間のメモリスタシェル12Bのコンダクタンスを調整することにより定義または編成される。場合によっては、訓練モジュール150は、訓練のために目標重みのセットを用いるかわりに、出力電極14Bにおける目標電流のセットから開始することもできる。
図5A〜図5Cは、本明細書に記載の様々な実施形態に係る、フィードフォワードネットワークを訓練するためのメモリスタネットワーク訓練プロセスの例を示す図である。訓練プロセスは、図4に示すフィードフォワードネットワーク30及び訓練プロセッサ110に関して記載される。従って、訓練プロセッサ110は、図5A〜図5Cに示すプロセスを実行するように構成される。しかしながら、他のフィードフォワードネットワークは、図5A〜図5Cに示すプロセスを用いて他の訓練プロセッサにより訓練され得る。さらに、プロセスの図は操作又は実行の順序を示すが、この順序は図に示される順序とは異なってもよい。例えば、2つ以上のプロセスステップの実行の順序は、図示された順序又は後述のものに関して切り替えられ得る。また、連続して示される2つ以上のプロセスステップは、同時に、又は部分的に同時に実行され得る。さらに、いくつかの実施例では、プロセス図に示されるプロセスステップの1つ以上はスキップ又は省略され得る。
図5Aについて、訓練モジュール150はまず、内部ノードの導電性コア12Aとフィードフォワードネットワーク30の出力電極14Bとの間のコンダクタンス又は重み(例えばメモリスタのコンダクタンス)を訓練することができる。そのため、ステップ202において、プロセスは、フィードフォワードネットワークの1つ以上の入力ノードに入力電力を印加することを含む。例えば、訓練モジュール150は、−VT/2とVT/2との間の電圧をフィードフォワードネットワーク30の1つ以上の入力電極14Aに印加するように、インタフェースモジュール130に指示することができる。ある場合には、訓練モジュール150は、−VT/2とVT/2の間の電圧を入力電極14Aの各々に印加するように、インタフェースモジュール130に指示することができる。電圧の印加のかわりに、訓練モジュール150は、1つ以上の入力電極14Aに所定のレベルの電流を印加又は駆動するように、インタフェースモジュール130に指示することができる。
ステップ204において、プロセスは、フィードフォワードネットワークの1つ以上の出力ノードを接地することを含み得る。例えば、訓練モジュール150は、フィードフォワードネットワーク30の出力電極14Bのうちの1つ以上を接地するようにインタフェースモジュール130に指示することができる。場合によっては、訓練モジュール150は、出力電極14Bの各々を接地するように、インタフェースモジュール130に指示することができる。
上述のように、式(5)において、次の正規化係数Gjは、電圧又は電流の瞬間値には依存しない。
正規化係数Gjは、フィードフォワードネットワーク30の動作に大きな影響を与えない。全ての出力ノードが接地されたままであれば(すなわちVi=0であれば)、総和への寄与は入力ノードの寄与のみである。従って、内部ノードの電圧は、コンダクタンスの行列を正規化係数で除算することによる入力の線形変換と見なすことができる。
同様に、出力電極14Bにおける電流については、訓練モジュール150により解かれ得る。すべての出力電極14Bはステップ204において接地されているため、電流は式(6)により与えられ得る。上述のように、これは、コンダクタンスの行列による隠れ層ノードの線形変換である。同時に、出力電極14Bの実際の電流は、測定モジュール140による測定のために、インタフェースモジュール130によりアクセス可能である。
ステップ206において、プロセスは、1つ以上の出力電極14Bで出力電流を測定する測定モジュール140を含み得る。測定モジュール140は、出力電極14Bの各々の出力電流を測定し、次に、さらなる処理のために、それらの値をデータストア120に格納することができる。場合によってはステップ106において、測定モジュール140は、電流に加えて、1つ以上の出力電極14Bで出力電圧を測定することもできる。
ステップ208において、プロセスは、訓練モジュール150を含み得る。訓練モジュール150は、ステップ206で測定された、出力電極14Bのうちの1つ以上における出力電流(又は電圧)を、目標又は所望の出力電流(又は電圧)と比較して、第1の誤差デルタを決定する。ステップ208は、出力電極14Bのそれぞれについて順番に実行することができ、出力電極14Bの各々について第1の誤差デルタを決定することができる。誤差デルタは、さらなる処理のためにデータストア120に保存され得る。
ステップ208は、上述の式(7)に係るデルタルールの適用から続く。誤差デルタ(例えば式(7)の(Tk−Ik))が正値の場合、ステップ206で測定された電流を大きくすることで誤差を小さくすることが望ましい。これは、正値の内部ノードへの接続を強め、負値の内部ノードへの接続を弱めることにより実現できる。誤差デルタが負値の場合、ステップ206で測定された電流を小さくして誤差を小さくすることが望ましい。
ステップ210において、プロセスは、ステップ208で決定された第1の誤差デルタの大きさに比例する期間の間、出力電極14Bの1つ以上にしきい値電圧又はしきい値電流を印加する訓練モジュール150を含み得る。例えば、ステップ208において、出力電極14Bのうちの第1のものについて第1の誤差デルタが決定され得る。続いて、ステップ210において、訓練モジュール150は、ステップ208で出力電極14Bのうちの第1のものについて決定された第1の誤差デルタの大きさに比例する期間の間、出力電極14Bのうちの第1のものに正値のしきい値電圧VT又は負値のしきい値電圧−VTを印加するように、インタフェースモジュール130に指示できる。残りの出力電極14B(すなわち、第1のもの以外)は接地されたままであってよい。ステップ210は、出力電極14Bの各々について順に繰り返され得る。
ステップ210においてしきい値電圧を印加する手順は、図5Bにさらに詳細に示される。図5Bのステップ302において、プロセスは、出力電極14Bのうちの第1のものに対するステップ208からの誤差デルタ(例えば式(7)の(Tk−Ik))が負値か否かを判定する訓練モジュール150を含む。誤差デルタが負値の場合、プロセスはステップ304に進む。誤差デルタが正値の場合、プロセスはステップ308に進む。
ステップ304において、プロセスは、誤差δに比例する期間の間、正値のしきい値電圧又はしきい値電流を1つ以上の出力ノードに印加する訓練モジュール150を含む。例えば、ステップ208において、出力電極14Bの第1のものについて誤差デルタを決定することができる。次に、ステップ304において、訓練モジュール150は、ステップ208において決定された誤差デルタの大きさに比例する期間の間、正値のしきい値電圧VTを出力電極14Bのうちの第1のものに印加するように、インタフェースモジュール130に指示することができる。残りの出力電極14B(すなわち第1のもの以外)は、ステップ304において接地されたままであってよい。
上述のように、ステップ304において出力電極14Bの第1のものが選択され、電圧がVTと等しく設定されている場合、Vjが正値のため、電圧降下(VT−Vj)は定義によりVTよりも小さく、正値の電圧(+Vj)を有する全ての内部ノードへの接続がコンダクタンスを変化させることはない。これにより、電圧降下がVTよりも大きい負値のVjにより、内部ノードが分離される。また、負値の内部ノードの各々における電圧降下は、式(9)及び式(10)に示される関係に等しくなる。
従って、さらに、コンダクタンスの変化を導く量ΔG∝(ΔV−VT)は、Vjに比例する。誤差デルタが負値の場合(すなわち、図5Bのステップ302における「Yes」分岐)、電流はさらに負値でなければならない。従って、負値の電圧により内部ノードへの接続を強めることが望ましい。上述のΔV>VTが成立するケースでは、ステップ304で出力電極14Bの第1のものにVTを印加することで、すべての負値の内部ノードへのコンダクタンスを各ノードのVjに比例する量だけ増やすことができる。この電圧がこの出力ノードの誤差デルタに比例する時間tの間だけ印加されるとすると、この接続のセットに対して、逆伝播アルゴリズムΔGkj=α(Tk−Ik)Vjが再構築され得る。
これは、時間tの間電圧+VTを印加した後、電圧−VTを印加することにより、出力電極14Bの第1のものに接続された正値の内部ノードに拡張され得る。従って、ステップ306においてプロセスは、誤差デルタに比例する期間にわたって、負値のしきい値電圧又はしきい値電流を、1つ以上のノードに印加することも含み得る。例えば、ステップ306において、訓練モジュール150は、ステップ208で決定された誤差デルタの大きさに比例する期間tの間、出力電極14Bの第1のものに負値のしきい値電圧−VTを印加するように、インタフェースモジュール130に指示することができる。残りの出力電極14B(すなわち第1のもの以外)は、ステップ306で接地されたままであり得る。
ステップ306により、負値の電圧を有する全ての内部ノードにおける電圧降下(−VT−Vj)は、コンダクタンス変化のしきい値を下回り、正値のVjを伴う内部ノードを効果的に分離する。同様の理由で、これらの正値の内部ノードの間のコンダクタンス変化の大きさは、各内部ノードにおける、コンダクタンスを増加させる方向ではなく減少させる方向の電圧にも比例する。繰り返しになるが、これは、負値の誤差デルタを有する出力ノード(すなわち、図5Bのステップ302からの「Yes」分岐)に必要なものである。ステップ304及びステップ306は、負値の誤差デルタを有するすべての出力電極14Bに対して生じ得る。
正値の誤差デルタを有する出力(すなわち、図5Bのステップ302における「No」分岐)を考慮するために、これらのコンダクタンス変化の方向が逆転され得る。特に、負値の内部ノードへの接続が弱められ、正値の内部ノードへの接続が強められ得る。これは、ステップ308において全ての入力の電圧極性を逆転する(ことで全ての内部ノードの符号を逆転する)ことにより実現できる。ステップ308において、プロセスは、入力電極14Aに印加される入力電圧又は入力電流の極性を逆転させる訓練モジュール150を含み得る。これは、ステップ202において入力電極14Aに印加される電圧又は電流の極性の逆転であり得る。さらに、ステップ310及びステップ312において、プロセスは、それぞれステップ304及びステップ306と同様のステップを含む。ステップ308,310,312は、正値の誤差デルタを有する全ての出力電極14Bに対して発生し得る。プロセスは、図5Bから、図5Aのステップ212に戻ることができる。
図5Aに戻って、訓練モジュール150は、入力電極14Aと内部ノードの導電性コア12Aとの間のコンダクタンス又は重みを訓練することができる。入力電極14Aに印加される電圧は、ステップ202,204,206,208,210の間では−VT/2からVT/2の間に制限されていたため、入力ノードから内部ノードへの最大電圧降下がVTを超えることはできず、入力電極14Aと内部ノードの導電性コア12Aとの間の重みは、出力重みの訓練中には変更できなかった。
ステップ212において、プロセスは、出力電極14Bの1つ以上に対して、ステップ208で決定された出力電極14Bの第1の誤差デルタを出力電極14Bの第2の誤差デルタに変換する訓練モジュール150を含み得る。一例として、訓練モジュール150は、出力電極14Bのうちの第1のものに対する第1の誤差デルタ電流(例えば式(7)の(Tk−Ik))を、第2の誤差デルタ(電圧であってよい)に変換し得る。第2の誤差デルタは第1の誤差デルタに比例し得るが、例えば電流から電圧に、又は電圧から電流に変換され得る。ステップ212は、データストア120に格納された、ステップ208からの第1の誤差デルタを参照して、出力電極14Bの各々に対して実行され得る。
ステップ214において、プロセスは、フィードフォワードネットワークの1つ以上の入力ノードを接地することを含み得る。例えば、訓練モジュール150は、フィードフォワードネットワーク30の1つ以上の入力電極14Aを接地するように、インタフェースモジュール130に指示できる。場合によっては、訓練モジュール150は、インタフェースモジュール130に各入力電極14Aを接地するように指示できる。
ステップ216において、プロセスは、出力電極14Bの各々に対して、ステップ212で決定された第2の誤差デルタを、出力電極14Bに印加することを含み得る。例えば、上述のように、電圧であり得る第2の誤差デルタは、出力電極14Bの各々についてステップ212で決定され得る。訓練モジュール150は、出力電極14Bの各々に対する第2の誤差デルタ電圧を、それぞれ出力電極14Bに印加するように、インタフェースモジュール130に指示できる。ステップ216は、同様にして、第2の誤差デルタの絶対値に比例する第2の期間の間、入力電極14Aにしきい値電圧又はしきい値電流を印加することも含み得る。
図5Cにおいて、ステップ216の手順がさらに詳細に示される。図5Cのステップ320において、訓練モジュール150は、出力電極14Bの各々に対してステップ212で決定された第2の誤差デルタ電圧を、対応する出力電極14Bに印加するように、インタフェースモジュール130に指示できる。
図5Cのステップ322において、プロセスは、図5Aのステップ202で入力電極14Aのうちの1つに印加された元の入力が負値であったか否かを判定する訓練モジュール150を含み得る。元の入力が負値の場合、プロセスはステップ324に進む。元の入力が正値の場合、プロセスはステップ328に進む。
ステップ324において、プロセスは、第2の誤差デルタに比例する期間の間、正値のしきい値電圧又はしきい値電流を1つ以上の入力ノードに印加する訓練モジュール150を含む。例えば、訓練モジュール150は、図5Aのステップ212で決定された第2の誤差デルタの絶対値に比例する第2の期間の間、入力電極14Aのうちの1つに正値のしきい値電圧VTを印加するように、インタフェースモジュール130に指示できる。さらに、ステップ326において、訓練モジュール150は、第2の期間の間、入力電極14Aのうちの第1のものに負値のしきい値電圧−VTを印加するように、インタフェースモジュール130に指示できる。残りの入力電極14A(すなわち、第1のもの以外)は、ステップ324及びステップ326で接地されたままであってよい。
図5Cのステップ328において、プロセスは、ステップ320で出力電極14Bに印加された第2の誤差デルタ電圧の極性を逆転する訓練モジュール150を含む。ステップ330において、プロセスは、第2の誤差デルタに比例する期間の間、正値のしきい値電圧又はしきい値電圧を1つ以上の入力ノードに印加する訓練モジュール150を含む。例えば、訓練モジュール150は、図5Aのステップ212で決定された第2の誤差デルタの絶対値に比例する第2の期間の間、入力電極14Aのうちの1つに正値のしきい値電圧VTを印加するように、インタフェースモジュール130に指示できる。さらに、ステップ332において、訓練モジュール150は、第2の期間の間入力電極14Aのうちの第1のものに負値のしきい値電圧−VTを印加するように、インタフェースモジュール130に指示できる。残りの入力電極14A(すなわち、第1のもの以外)は、ステップ324及びステップ326において接地されたままであってよい。
図5A〜図5Cに提示されたアルゴリズムは、二部メモリスタネットワークにおける逆伝播アルゴリズムを再現する。図5A〜図5Cの順序又はシーケンスの一例で示されているが、場合によっては、アルゴリズムは、代替のシーケンスで適用又は使用され得る。さらに、アルゴリズムにおいて印加及び/又は測定されるものとして特定の電圧及び電流が記載されているが、電圧の測定又は印加は、電流の測定又は印加で置き換えられ得ることは理解されたい。同様に、電流の測定又は印加は、電圧の測定又は印加で置き換えられ得る。アルゴリズムは、訓練例ごとに1回のみ各外部ノードに対して反復されるため、時間において、それはノード数に関する1次オーダーである。これは、時間において2次オーダーである逆伝播アルゴリズムの標準実装とは対照的である。
インタフェースモジュール130、測定モジュール140、及び訓練モジュール150を含む本明細書に記載のコンポーネントは、ハードウェア、ソフトウェア、又はハードウェア及びソフトウェアの組み合わせで実装され得る。ソフトウェアで実施される場合、各エレメントは、指定された論理機能を実装するプログラム命令を含むモジュール又はコードのグループを表現し得る。プログラム命令は、例えば、プログラミング言語で書かれた人間が読める文を含むソースコード、又は、コンピュータシステム又は他のシステムのプロセッサ等、適切な実行システムにより認識可能なマシン命令を含む機械コードの形で実施され得る。ハードウェアで実施される場合、各エレメントは、指定された論理機能を実施する回路又は相互接続された複数の回路を表現し得る。
訓練プロセッサ110は、少なくとも1つの処理回路を含み得る。このような処理回路は、例えば、ローカルインタフェースに結合された1つ以上のプロセッサ及び1つ以上のストレージデバイス若しくはメモリデバイスを含み得る。ローカルインタフェースは、例えば、付随するアドレス/制御バス又は他の適切なバス構造を備えるデータバスを含み得る。ストレージデバイス又はメモリデバイスは、処理回路のプロセッサで実行可能なデータ又はコンポーネントを格納できる。例えば、訓練モジュール150及び/又は他のコンポーネントは、1つ以上のストレージデバイスに保存され、訓練プロセッサ110内の1つ以上のプロセッサにより実行可能であり得る。
本明細書に記載の訓練モジュール150及び他のコンポーネントは、ハードウェアの形態、ハードウェアにより実行可能なソフトウェアコンポーネント、又はソフトウェア及びハードウェアの組み合わせの形態として実施され得る。ハードウェアとして実施される場合、本明細書に記載のコンポーネントは、任意の適切なハードウェア技術を採用する回路又は状態機械として実装され得る。ハードウェア技術は、例えば、1つ以上のマイクロプロセッサ、1つ以上のデータ信号の利用に関する様々な論理機能を実行するための論理ゲートを備えるディスクリート論理回路、適切な論理ゲートを備える特定用途向け集積回路(ASIC)、プログラマブル論理デバイス(例えばフィールドプログラマブルゲートアレイ(FPGA))、並びに、複雑なプログラマブル論理デバイスを含み得る。
また、ソフトウェア又はプログラム命令を含む、本明細書に記載するコンポーネントのうちの1つ以上を、コンピュータシステム若しくは他のシステム内のプロセッサ等の命令実行システムにより、又はその命令実行システムに関連して、使用されるための、任意の非一時的なコンピュータ可読媒体により実施され得る。コンピュータ可読媒体は、命令実行システムにより、又は命令実行システムに関連して、使用されるためのソフトウェア又はプログラム命令を含み、保存し、及び/又は保持することができる。
コンピュータ可読媒体は、磁気、光学、半導体、及び/又は他の適切な媒体といった物理媒体を含み得る。適切なコンピュータ可読媒体の例は、ソリッドステートドライブ、磁気ドライブ、又はフラッシュメモリ等を含むが、これらに限定されない。さらに、本明細書に記載の任意の論理又はコンポーネントは、様々な方法で実施及び構成され得る。例えば、記載された1つ以上のコンポーネントは、単一のアプリケーションのモジュール又はコンポーネントとして実施され得る。さらに、本明細書に記載の1つ以上のコンポーネントは、1つの計算デバイス上で、又は複数の計算デバイスを使用することにより、実行され得る。
本開示の上述の例は、本開示の原理の明確な理解のために記載された実装に関する可能性のある例示に過ぎない。本開示の理念及び原理から実質的に逸脱することなく、多数の変形及び修正が可能である。本明細書において、全てのこのような修正及び変形は、本開示の保護範囲に含まれ、添付の特許請求の範囲により保護されることを意図している。
本明細書に記載の実施形態のうちの1つ以上に対するサポートが、以下の項のうちの1つ以上に見いだされ得る。
第1項:
複数の入力ノード及び複数の出力ノードを備えるメモリスタネットワークを訓練するための方法であって、
前記複数の入力ノードのうちの1つの入力ノードに入力電圧又は入力電流を印加するステップと、
前記複数の出力ノードのうちの1つの出力ノードを接地するステップと、
前記1つの出力ノードにおける出力電流又は出力電圧を測定するステップと、
前記出力電流又は出力電圧を、目標電流又は目標電圧と比較して、誤差デルタを決定するステップと、
前記誤差デルタの大きさに比例する期間の間、前記1つの出力ノードにしきい値電圧又はしきい値電流を印加するステップとを含む、
方法。
複数の入力ノード及び複数の出力ノードを備えるメモリスタネットワークを訓練するための方法であって、
前記複数の入力ノードのうちの1つの入力ノードに入力電圧又は入力電流を印加するステップと、
前記複数の出力ノードのうちの1つの出力ノードを接地するステップと、
前記1つの出力ノードにおける出力電流又は出力電圧を測定するステップと、
前記出力電流又は出力電圧を、目標電流又は目標電圧と比較して、誤差デルタを決定するステップと、
前記誤差デルタの大きさに比例する期間の間、前記1つの出力ノードにしきい値電圧又はしきい値電流を印加するステップとを含む、
方法。
第2項:
前記誤差デルタが負値のとき、前記1つの出力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、前記誤差デルタに比例する期間の間、前記1つの出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、前記誤差デルタに比例する期間の間、前記1つの出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
第1項に記載の方法。
前記誤差デルタが負値のとき、前記1つの出力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、前記誤差デルタに比例する期間の間、前記1つの出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、前記誤差デルタに比例する期間の間、前記1つの出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
第1項に記載の方法。
第3項:
前記誤差デルタが正値のとき、前記1つの出力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、前記1つの入力ノードに印加される前記入力電圧又は前記入力電流の極性を逆転させるステップと、前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、前記誤差デルタに比例する期間の間、前記1つの出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
第1項に記載の方法。
前記誤差デルタが正値のとき、前記1つの出力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、前記1つの入力ノードに印加される前記入力電圧又は前記入力電流の極性を逆転させるステップと、前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、前記誤差デルタに比例する期間の間、前記1つの出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
第1項に記載の方法。
第4項:
前記誤差デルタを誤差デルタ電圧又は誤差デルタ電流に変換するステップと、
前記1つの出力ノードに前記誤差デルタ電圧又は前記誤差デルタ電流を印加するステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する第2の期間の間、前記しきい値電圧又は前記しきい値電流を前記1つの入力ノードに印加するステップとをさらに含む、
第1項に記載の方法。
前記誤差デルタを誤差デルタ電圧又は誤差デルタ電流に変換するステップと、
前記1つの出力ノードに前記誤差デルタ電圧又は前記誤差デルタ電流を印加するステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する第2の期間の間、前記しきい値電圧又は前記しきい値電流を前記1つの入力ノードに印加するステップとをさらに含む、
第1項に記載の方法。
第5項:
前記1つの入力ノードに印加される前記入力電圧又は前記入力電流が正値の場合、前記1つの入力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前1つの入力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
第4項に記載の方法。
前記1つの入力ノードに印加される前記入力電圧又は前記入力電流が正値の場合、前記1つの入力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前1つの入力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
第4項に記載の方法。
第6項:
前記1つの入力ノードに印加される前記入力電圧又は前記入力電流が負値の場合、前記1つの入力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、
前記1つの出力ノードに印加される前記誤差デルタ電圧又は前記誤差デルタ電流の極性を逆転させるステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前1つの入力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
第4項に記載の方法。
前記1つの入力ノードに印加される前記入力電圧又は前記入力電流が負値の場合、前記1つの入力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、
前記1つの出力ノードに印加される前記誤差デルタ電圧又は前記誤差デルタ電流の極性を逆転させるステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前1つの入力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
第4項に記載の方法。
第7項:
前記メモリスタネットワークは二部メモリスタネットワークを含む、
第1項に記載の方法。
前記メモリスタネットワークは二部メモリスタネットワークを含む、
第1項に記載の方法。
第8項:
前記メモリスタネットワークを訓練するための逆伝播アルゴリズムを再現する、
第1項に記載の方法。
前記メモリスタネットワークを訓練するための逆伝播アルゴリズムを再現する、
第1項に記載の方法。
第9項:
金属コア及びメモリスタシェルをそれぞれ備える複数のナノファイバと、
前記ナノファイバ上に配置されかつ複数の入力ノード及び複数の出力ノードを備える複数の電極と、
訓練プロセッサとを備えるメモリスタネットワークであって、
前記訓練プロセッサは、
前記複数の入力ノードのうちの1つの入力ノードに入力電圧又は入力電流を印加し、
前記複数の出力ノードのうちの1つの出力ノードを接地し、
前記1つの出力ノードにおける出力電流又は出力電圧を計測し、
前記出力電流又は前記出力電圧を、目標電流又は目標電圧と比較して、誤差デルタを決定し、及び、
前記誤差デルタの大きさに比例する期間の間、前記1つの出力ノードにしきい値電圧又はしきい値電流を印加するように構成される、
メモリスタネットワーク。
金属コア及びメモリスタシェルをそれぞれ備える複数のナノファイバと、
前記ナノファイバ上に配置されかつ複数の入力ノード及び複数の出力ノードを備える複数の電極と、
訓練プロセッサとを備えるメモリスタネットワークであって、
前記訓練プロセッサは、
前記複数の入力ノードのうちの1つの入力ノードに入力電圧又は入力電流を印加し、
前記複数の出力ノードのうちの1つの出力ノードを接地し、
前記1つの出力ノードにおける出力電流又は出力電圧を計測し、
前記出力電流又は前記出力電圧を、目標電流又は目標電圧と比較して、誤差デルタを決定し、及び、
前記誤差デルタの大きさに比例する期間の間、前記1つの出力ノードにしきい値電圧又はしきい値電流を印加するように構成される、
メモリスタネットワーク。
第10項:
前記誤差デルタが負値のとき、前記訓練プロセッサは、
前記誤差デルタに比例する前記期間の間、前記出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタに比例する前記期間の間、前記出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するようにさらに構成される、
第9項に記載のメモリスタネットワーク。
前記誤差デルタが負値のとき、前記訓練プロセッサは、
前記誤差デルタに比例する前記期間の間、前記出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタに比例する前記期間の間、前記出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するようにさらに構成される、
第9項に記載のメモリスタネットワーク。
第11項:
前記誤差デルタが正値のとき、前記訓練プロセッサは、
前記1つの入力ノードに印加される前記入力電圧又は前記入力電流の極性を逆転させ、
前記誤差デルタに比例する前記期間の間、前記出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタに比例する前記期間の間、前記出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するようにさらに構成される、
第9項に記載のメモリスタネットワーク。
前記誤差デルタが正値のとき、前記訓練プロセッサは、
前記1つの入力ノードに印加される前記入力電圧又は前記入力電流の極性を逆転させ、
前記誤差デルタに比例する前記期間の間、前記出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタに比例する前記期間の間、前記出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するようにさらに構成される、
第9項に記載のメモリスタネットワーク。
第12項:
前記訓練プロセッサは、
前記誤差デルタを誤差デルタ電圧又は誤差デルタ電流に変換し、
前記1つの出力ノードに前記誤差デルタ電圧又は前記誤差デルタ電流を印加し、及び、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する第2の期間の間、前記1つの入力ノードに前記しきい値電圧又は前記しきい値電流を印加するようにさらに構成される、
第9項に記載のメモリスタネットワーク。
前記訓練プロセッサは、
前記誤差デルタを誤差デルタ電圧又は誤差デルタ電流に変換し、
前記1つの出力ノードに前記誤差デルタ電圧又は前記誤差デルタ電流を印加し、及び、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する第2の期間の間、前記1つの入力ノードに前記しきい値電圧又は前記しきい値電流を印加するようにさらに構成される、
第9項に記載のメモリスタネットワーク。
第13項:
前記1つの入力ノードに印加された前記入力電圧又は前記入力電流が正値であったとき、前記訓練プロセッサは、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、負値のしきい値電圧又は負値のしきい値電流を印加するように構成される、
第12項に記載のメモリスタネットワーク。
前記1つの入力ノードに印加された前記入力電圧又は前記入力電流が正値であったとき、前記訓練プロセッサは、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、負値のしきい値電圧又は負値のしきい値電流を印加するように構成される、
第12項に記載のメモリスタネットワーク。
第14項:
前記1つの入力ノードに印加された前記入力電圧又は前記入力電流が負値であったとき、前記訓練プロセッサは、
前記出力ノードに印加される前記誤差デルタ電圧又は前記誤差デルタ電流の極性を逆転させ、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、負値のしきい値電圧又は負値のしきい値電流を印加するように構成される、
第12項に記載のメモリスタネットワーク。
前記1つの入力ノードに印加された前記入力電圧又は前記入力電流が負値であったとき、前記訓練プロセッサは、
前記出力ノードに印加される前記誤差デルタ電圧又は前記誤差デルタ電流の極性を逆転させ、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、負値のしきい値電圧又は負値のしきい値電流を印加するように構成される、
第12項に記載のメモリスタネットワーク。
第15項:
前記メモリスタネットワークは、二部メモリスタネットワークを含む、
第9項に記載のメモリスタネットワーク。
前記メモリスタネットワークは、二部メモリスタネットワークを含む、
第9項に記載のメモリスタネットワーク。
第16項:
複数の入力ノード及び複数の出力ノードを備えるメモリスタネットワークを訓練する方法であって、
前記複数の入力ノードのうちの1つの入力ノードに入力電圧を印加するステップと、
前記複数の出力ノードのうちの1つの出力ノードを接地するステップと、
前記1つの出力ノードにおいて出力電流を計測するステップと、
前記出力電流を目標電流と比較して誤差デルタを決定するステップと、
前記誤差デルタの大きさに比例する期間の間、前記1つの出力ノードにしきい値電圧を印加するステップとを含む、
方法。
複数の入力ノード及び複数の出力ノードを備えるメモリスタネットワークを訓練する方法であって、
前記複数の入力ノードのうちの1つの入力ノードに入力電圧を印加するステップと、
前記複数の出力ノードのうちの1つの出力ノードを接地するステップと、
前記1つの出力ノードにおいて出力電流を計測するステップと、
前記出力電流を目標電流と比較して誤差デルタを決定するステップと、
前記誤差デルタの大きさに比例する期間の間、前記1つの出力ノードにしきい値電圧を印加するステップとを含む、
方法。
第17項:
前記誤差デルタが負値のとき、前記1つの出力ノードに前記しきい値電圧を印加するステップは、
前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに正値のしきい値電圧を印加するステップと、及び、
前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに負値のしきい値電圧を印加するステップとを含む、
第16項に記載の方法。
前記誤差デルタが負値のとき、前記1つの出力ノードに前記しきい値電圧を印加するステップは、
前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに正値のしきい値電圧を印加するステップと、及び、
前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに負値のしきい値電圧を印加するステップとを含む、
第16項に記載の方法。
第18項:
前記誤差デルタが正値のとき、前記1つの出力ノードに前記しきい値電圧に印加するステップは、
前記1つの入力ノードに印加される前記入力電圧の極性を逆転させるステップと、
前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに正値のしきい値電圧を印加するステップと、及び、
前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに負値のしきい値電圧を印加するステップとを含む、
第16項に記載の方法。
前記誤差デルタが正値のとき、前記1つの出力ノードに前記しきい値電圧に印加するステップは、
前記1つの入力ノードに印加される前記入力電圧の極性を逆転させるステップと、
前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに正値のしきい値電圧を印加するステップと、及び、
前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに負値のしきい値電圧を印加するステップとを含む、
第16項に記載の方法。
第19項:
前記メモリスタネットワークは二部メモリスタネットワークを含む、
第16項に記載の方法。
前記メモリスタネットワークは二部メモリスタネットワークを含む、
第16項に記載の方法。
第20項:
前記メモリスタネットワークを訓練するための逆伝播アルゴリズムを再現する、
第16項に記載の方法。
前記メモリスタネットワークを訓練するための逆伝播アルゴリズムを再現する、
第16項に記載の方法。
Claims (15)
- 複数の入力ノード及び複数の出力ノードを備えるメモリスタネットワークを訓練するための方法であって、
前記複数の入力ノードのうちの1つの入力ノードに入力電圧又は入力電流を印加するステップと、
前記複数の出力ノードのうちの1つの出力ノードを接地するステップと、
前記1つの出力ノードにおける出力電流又は出力電圧を測定するステップと、
前記出力電流又は出力電圧を、目標電流又は目標電圧と比較して、誤差デルタを決定するステップと、
前記誤差デルタの大きさに比例する期間の間、前記1つの出力ノードにしきい値電圧又はしきい値電流を印加するステップとを含む、
方法。 - 前記誤差デルタが負値のとき、前記1つの出力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、前記誤差デルタに比例する期間の間、前記1つの出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、前記誤差デルタに比例する期間の間、前記1つの出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
請求項1に記載の方法。 - 前記誤差デルタが正値のとき、前記1つの出力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、前記1つの入力ノードに印加される前記入力電圧又は前記入力電流の極性を逆転させるステップと、前記誤差デルタに比例する前記期間の間、前記1つの出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、前記誤差デルタに比例する期間の間、前記1つの出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
請求項1に記載の方法。 - 前記誤差デルタを誤差デルタ電圧又は誤差デルタ電流に変換するステップと、
前記1つの出力ノードに前記誤差デルタ電圧又は前記誤差デルタ電流を印加するステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する第2の期間の間、前記しきい値電圧又は前記しきい値電流を前記1つの入力ノードに印加するステップとをさらに含む、
請求項1に記載の方法。 - 前記1つの入力ノードに印加される前記入力電圧又は前記入力電流が正値の場合、前記1つの入力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前1つの入力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
請求項4に記載の方法。 - 前記1つの入力ノードに印加される前記入力電圧又は前記入力電流が負値の場合、前記1つの入力ノードに前記しきい値電圧又は前記しきい値電流を印加するステップは、
前記1つの出力ノードに印加される前記誤差デルタ電圧又は前記誤差デルタ電流の極性を逆転させるステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前1つの入力ノードに正値のしきい値電圧又は正値のしきい値電流を印加するステップと、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するステップとを含む、
請求項4に記載の方法。 - 前記メモリスタネットワークは二部メモリスタネットワークを含む、
請求項1に記載の方法。 - 前記メモリスタネットワークを訓練するための逆伝播アルゴリズムを再現する、
請求項1に記載の方法。 - 金属コア及びメモリスタシェルをそれぞれ備える複数のナノファイバと、
前記複数のナノファイバ上に配置されかつ複数の入力ノード及び複数の出力ノードを備える複数の電極と、
訓練プロセッサとを備えるメモリスタネットワークであって、
前記訓練プロセッサは、
前記複数の入力ノードのうちの1つの入力ノードに入力電圧又は入力電流を印加し、
前記複数の出力ノードのうちの1つの出力ノードを接地し、
前記1つの出力ノードにおける出力電流又は出力電圧を計測し、
前記出力電流又は前記出力電圧を、目標電流又は目標電圧と比較して、誤差デルタを決定し、及び、
前記誤差デルタの大きさに比例する期間の間、前記1つの出力ノードにしきい値電圧又はしきい値電流を印加するように構成される、
メモリスタネットワーク。 - 前記誤差デルタが負値のとき、前記訓練プロセッサは、
前記誤差デルタに比例する前記期間の間、前記出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタに比例する前記期間の間、前記出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するようにさらに構成される、
請求項9に記載のメモリスタネットワーク。 - 前記誤差デルタが正値のとき、前記訓練プロセッサは、
前記1つの入力ノードに印加される前記入力電圧又は前記入力電流の極性を逆転させ、
前記誤差デルタに比例する前記期間の間、前記出力ノードに正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタに比例する前記期間の間、前記出力ノードに負値のしきい値電圧又は負値のしきい値電流を印加するようにさらに構成される、
請求項9に記載のメモリスタネットワーク。 - 前記訓練プロセッサは、
前記誤差デルタを誤差デルタ電圧又は誤差デルタ電流に変換し、
前記1つの出力ノードに前記誤差デルタ電圧又は前記誤差デルタ電流を印加し、及び、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する第2の期間の間、前記1つの入力ノードに前記しきい値電圧又は前記しきい値電流を印加するようにさらに構成される、
請求項9に記載のメモリスタネットワーク。 - 前記1つの入力ノードに印加された前記入力電圧又は前記入力電流が正値であったとき、前記訓練プロセッサは、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、負値のしきい値電圧又は負値のしきい値電流を印加するように構成される、
請求項12に記載のメモリスタネットワーク。 - 前記1つの入力ノードに印加された前記入力電圧又は前記入力電流が負値であったとき、前記訓練プロセッサは、
前記出力ノードに印加される前記誤差デルタ電圧又は前記誤差デルタ電流の極性を逆転させ、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、正値のしきい値電圧又は正値のしきい値電流を印加し、及び、
前記誤差デルタ電圧又は前記誤差デルタ電流の絶対値に比例する前記第2の期間の間、前記1つの入力ノードに、負値のしきい値電圧又は負値のしきい値電流を印加するように構成される、
請求項12に記載のメモリスタネットワーク。 - 前記メモリスタネットワークは、二部メモリスタネットワークを含む、
請求項9に記載のメモリスタネットワーク。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762509423P | 2017-05-22 | 2017-05-22 | |
| US62/509,423 | 2017-05-22 | ||
| PCT/US2018/033669 WO2018217632A1 (en) | 2017-05-22 | 2018-05-21 | Deep learning in bipartite memristive networks |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020521248A true JP2020521248A (ja) | 2020-07-16 |
Family
ID=64271828
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019564492A Pending JP2020521248A (ja) | 2017-05-22 | 2018-05-21 | 二部メモリスタネットワークにおける深層学習 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US20180336470A1 (ja) |
| EP (1) | EP3631800A4 (ja) |
| JP (1) | JP2020521248A (ja) |
| KR (1) | KR20200009044A (ja) |
| CN (1) | CN110651330A (ja) |
| AU (1) | AU2018273847A1 (ja) |
| WO (1) | WO2018217632A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023032158A1 (ja) * | 2021-09-03 | 2023-03-09 | 日本電気株式会社 | 演算装置、ニューラルネットワークシステム、ニューロンモデル装置、演算方法および学習済みモデル生成方法 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3776271A4 (en) | 2018-04-05 | 2022-01-19 | Rain Neuromorphics Inc. | SYSTEMS AND METHODS FOR EFFICIENT MATRIX MULTIPLICATION |
| US20210049504A1 (en) * | 2019-08-14 | 2021-02-18 | Rain Neuromorphics Inc. | Analog system using equilibrium propagation for learning |
| US11450712B2 (en) | 2020-02-18 | 2022-09-20 | Rain Neuromorphics Inc. | Memristive device |
| CN111555357A (zh) * | 2020-06-04 | 2020-08-18 | 西华大学 | 一种光伏发电优化控制的方法 |
| US11551091B2 (en) | 2021-03-05 | 2023-01-10 | Rain Neuromorphics Inc. | Learning in time varying, dissipative electrical networks |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160275395A1 (en) * | 2015-03-18 | 2016-09-22 | International Business Machines Corporation | Implementing a neural network algorithm on a neurosynaptic substrate based on metadata associated with the neural network algorithm |
| WO2016175822A1 (en) * | 2015-04-30 | 2016-11-03 | Hewlett-Packard Development Company, L.P. | Memory including bi-polar memristor |
| US20170017879A1 (en) * | 2015-07-13 | 2017-01-19 | Denso Corporation | Memristive neuromorphic circuit and method for training the memristive neuromorphic circuit |
| US20170098156A1 (en) * | 2014-06-19 | 2017-04-06 | University Of Florida Research Foundation, Inc. | Memristive nanofiber neural networks |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7366412B2 (en) * | 2002-11-08 | 2008-04-29 | Nortel Networks Limited | Hybrid fine-coarse carrier switching |
| US8416604B2 (en) * | 2010-01-26 | 2013-04-09 | Industrial Cooperation Foundation Chonbuk National University | Method of implementing memristor-based multilevel memory using reference resistor array |
| JP6501146B2 (ja) * | 2014-03-18 | 2019-04-17 | パナソニックIpマネジメント株式会社 | ニューラルネットワーク回路およびその学習方法 |
| BR112016029682A2 (pt) * | 2014-06-19 | 2018-07-10 | The Univ Of Florida Research Foundation Inc | redes neurais de nanofibras memristivas. |
| CN104779950B (zh) * | 2015-05-05 | 2017-08-08 | 西南大学 | 基于忆阻交叉架构的图片均值学习电路 |
| US10885429B2 (en) * | 2015-07-06 | 2021-01-05 | University Of Dayton | On-chip training of memristor crossbar neuromorphic processing systems |
| US10074050B2 (en) * | 2015-07-13 | 2018-09-11 | Denso Corporation | Memristive neuromorphic circuit and method for training the memristive neuromorphic circuit |
| CN105160401B (zh) * | 2015-08-27 | 2017-08-11 | 电子科技大学 | 一种基于忆阻器阵列的wta神经网络及其应用 |
| WO2017131651A1 (en) * | 2016-01-27 | 2017-08-03 | Hewlett Packard Enterprise Development Lp | Memristive array with parallel reset control devices |
| US9691479B1 (en) * | 2016-04-29 | 2017-06-27 | Hewlett Packard Enterprise Development Lp | Method of operating and apparatus of memristor arrays with diagonal lines interconnect between memristor cells |
| US9847132B1 (en) * | 2016-07-28 | 2017-12-19 | Hewlett Packard Enterprise Development Lp | Ternary content addressable memories |
| US9646243B1 (en) * | 2016-09-12 | 2017-05-09 | International Business Machines Corporation | Convolutional neural networks using resistive processing unit array |
-
2018
- 2018-05-21 US US15/985,212 patent/US20180336470A1/en not_active Abandoned
- 2018-05-21 AU AU2018273847A patent/AU2018273847A1/en not_active Abandoned
- 2018-05-21 KR KR1020197037028A patent/KR20200009044A/ko not_active Application Discontinuation
- 2018-05-21 EP EP18805503.2A patent/EP3631800A4/en not_active Withdrawn
- 2018-05-21 JP JP2019564492A patent/JP2020521248A/ja active Pending
- 2018-05-21 CN CN201880031196.7A patent/CN110651330A/zh active Pending
- 2018-05-21 WO PCT/US2018/033669 patent/WO2018217632A1/en active Application Filing
-
2023
- 2023-04-25 US US18/138,984 patent/US20230297839A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170098156A1 (en) * | 2014-06-19 | 2017-04-06 | University Of Florida Research Foundation, Inc. | Memristive nanofiber neural networks |
| US20160275395A1 (en) * | 2015-03-18 | 2016-09-22 | International Business Machines Corporation | Implementing a neural network algorithm on a neurosynaptic substrate based on metadata associated with the neural network algorithm |
| WO2016175822A1 (en) * | 2015-04-30 | 2016-11-03 | Hewlett-Packard Development Company, L.P. | Memory including bi-polar memristor |
| US20170017879A1 (en) * | 2015-07-13 | 2017-01-19 | Denso Corporation | Memristive neuromorphic circuit and method for training the memristive neuromorphic circuit |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023032158A1 (ja) * | 2021-09-03 | 2023-03-09 | 日本電気株式会社 | 演算装置、ニューラルネットワークシステム、ニューロンモデル装置、演算方法および学習済みモデル生成方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230297839A1 (en) | 2023-09-21 |
| CN110651330A (zh) | 2020-01-03 |
| KR20200009044A (ko) | 2020-01-29 |
| WO2018217632A1 (en) | 2018-11-29 |
| EP3631800A1 (en) | 2020-04-08 |
| EP3631800A4 (en) | 2021-04-07 |
| AU2018273847A1 (en) | 2019-11-14 |
| US20180336470A1 (en) | 2018-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020521248A (ja) | 二部メモリスタネットワークにおける深層学習 | |
| JP5885719B2 (ja) | 識別装置および演算装置 | |
| EP2776988B1 (en) | Method and apparatus for using memory in probabilistic manner to store synaptic weights of neural network | |
| KR101466251B1 (ko) | 뉴럴 시스템을 구현하기 위한 방법들, 장치들 및 컴퓨터 판독가능 매체 및 그에 의한 전기 회로 | |
| JP5512895B2 (ja) | 報酬変調されたスパイクタイミング依存可塑性のための方法およびシステム | |
| CN110945535B (zh) | 一种在人工神经网络ann中实现的方法 | |
| US11562249B2 (en) | DNN training with asymmetric RPU devices | |
| EP3055812A2 (en) | Shared memory architecture for a neural simulator | |
| KR20130036313A (ko) | 이산-레벨 시냅스들 및 확률적 stdp를 이용한 디지털 뉴럴 프로세싱을 위한 방법들 및 시스템들 | |
| CN111373414A (zh) | 用于减少固定设备不对称性的具有极性反转的电导对之间的突触权重传递 | |
| WO2015069614A1 (en) | Implementing synaptic learning using replay in spiking neural networks | |
| Dong et al. | Hybrid dual‐complementary metal–oxide–semiconductor/memristor synapse‐based neural network with its applications in image super‐resolution | |
| US20190147328A1 (en) | Competitive machine learning accuracy on neuromorphic arrays with non-ideal non-volatile memory devices | |
| WO2015130476A2 (en) | Method and apparatus for efficient implementation of common neuron models | |
| US10002658B1 (en) | Dynamic random-access memory with embedded artificial neural network functionality | |
| US11556770B2 (en) | Auto weight scaling for RPUs | |
| US9542645B2 (en) | Plastic synapse management | |
| US20210064974A1 (en) | Formation failure resilient neuromorphic device | |
| WO2014197175A2 (en) | Efficient implementation of neural population diversity in neural system | |
| US10740673B2 (en) | Scalable refresh for asymmetric non-volatile memory-based neuromorphic circuits | |
| JP2023530755A (ja) | 振動性ニューラル・ネットワークのトレーニング | |
| Gavrilov et al. | Capacity, fidelity, and noise tolerance of associative spatial-temporal memories based on memristive neuromorphic networks | |
| US11487990B2 (en) | Resistive crossbar arrays with reduced numbers of elements | |
| US20230186068A1 (en) | Weight confirmation method for an analog synaptic device of an artificial neural network |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220524 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20221220 |