JP2020509714A - ピクチャブロックのイントラ予測に使用される参照サンプルの処理 - Google Patents
ピクチャブロックのイントラ予測に使用される参照サンプルの処理 Download PDFInfo
- Publication number
- JP2020509714A JP2020509714A JP2019548616A JP2019548616A JP2020509714A JP 2020509714 A JP2020509714 A JP 2020509714A JP 2019548616 A JP2019548616 A JP 2019548616A JP 2019548616 A JP2019548616 A JP 2019548616A JP 2020509714 A JP2020509714 A JP 2020509714A
- Authority
- JP
- Japan
- Prior art keywords
- filter
- filter coefficients
- video
- block
- prediction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012545 processing Methods 0.000 title description 26
- 238000000034 method Methods 0.000 claims abstract description 104
- 239000013074 reference sample Substances 0.000 claims abstract description 48
- 238000009499 grossing Methods 0.000 claims description 30
- 239000013598 vector Substances 0.000 description 18
- 238000013139 quantization Methods 0.000 description 17
- 230000008569 process Effects 0.000 description 15
- 230000005540 biological transmission Effects 0.000 description 14
- 238000003860 storage Methods 0.000 description 14
- 238000004891 communication Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 11
- 238000001914 filtration Methods 0.000 description 9
- 230000006835 compression Effects 0.000 description 7
- 238000007906 compression Methods 0.000 description 7
- 208000037170 Delayed Emergence from Anesthesia Diseases 0.000 description 6
- 230000003044 adaptive effect Effects 0.000 description 6
- 230000002457 bidirectional effect Effects 0.000 description 6
- 230000011664 signaling Effects 0.000 description 5
- 238000013500 data storage Methods 0.000 description 4
- 238000005457 optimization Methods 0.000 description 4
- 230000002123 temporal effect Effects 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000003491 array Methods 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 230000006837 decompression Effects 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 230000012447 hatching Effects 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 102100025326 Golgin-45 Human genes 0.000 description 1
- 101100122513 Homo sapiens BLZF1 gene Proteins 0.000 description 1
- 101100453261 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) JEM1 gene Proteins 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000012432 intermediate storage Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000000638 solvent extraction Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images












Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/182—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a pixel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/44—Decoders specially adapted therefor, e.g. video decoders which are asymmetric with respect to the encoder
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/80—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation
- H04N19/82—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation involving filtering within a prediction loop
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
Description
本特許出願は、2018年4月3日に出願された、「Processing Reference Samples Used For Intra−Prediction of a Picture Block」と題する米国特許出願第15/943,853号の優先権を主張するものであり、同米国特許出願は、Alexey Filippovらにより2017年4月4日に出願された、「Method and Apparatus for Processing Reference Samples Used for Intra−Prediction of a Picture Block」と題する米国特許仮出願第62/481,525号の優先権を主張するものであり、これらの両方ともその全体が参照により本明細書に組み込まれる。
該当せず。
該当せず。

P=arg max{NP=0,NP=1}
ここで、NP=0およびNP=1は、パラメータ値がそれぞれ0および1のBUを表す。
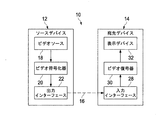
符号化デバイスから、ビットストリームを受信するように構成された受信手段であって、ビットストリームが画像を含む、受信手段と、受信手段に結合された処理手段であって、処理手段が、画像内から現在のブロックを選択し、現在のブロックの予測方向を決定し、予測方向に沿った伝播距離を決定し、伝播距離が、現在のブロックにおける予測対象の画素と現在のブロックに隣接する参照サンプルとの間で測定され、伝播距離に基づいて、複数のフィルタ係数のうちの1つを選択し、フィルタおよび選択された、複数のフィルタ係数のうちの1つを使用して、現在のブロックにおける画素を予測するように構成される、処理手段と、処理手段に動作可能に結合された表示手段であって、表示手段が、予測された画素を含む画像を表示するように構成される、表示手段と、を備える、復号デバイス。
12 ソースデバイス、ビデオデバイス
14 宛先デバイス、ビデオデバイス
16 コンピュータ可読媒体
18 ビデオソース
20 ビデオ符号化器
22 出力インターフェース
28 入力インターフェース
30 ビデオ復号器
32 表示デバイス
40 モード選択ユニット
42 動き推定ユニット
44 動き補償ユニット
46 イントラ予測ユニット
48 分割ユニット
50 加算器
52 変換処理ユニット
54 量子化ユニット
56 エントロピー符号化ユニット
58 逆量子化ユニット
60 逆変換ユニット
62 加算器
64 参照フレームメモリ
70 エントロピー復号ユニット
72 動き補償ユニット
74 イントラ予測ユニット
76 逆量子化ユニット
78 逆変換ユニット
80 加算器
82 参照フレームメモリ
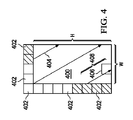
400 ブロック
402 参照サンプル
404 予測方向
406 画素
408 伝播距離、予測距離
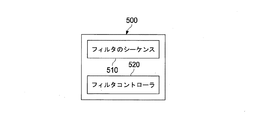
500 ビデオ符号化デバイス
510 フィルタシーケンス
520 フィルタコントローラ
600 フィルタシーケンス
602 フィルタ制御モジュール
604 参照サンプル平滑化ユニット
606 イントラ予測ユニット
608 予測ブロックフィルタユニット
610 境界平滑化ユニット
612 隣接サンプル
614 参照サンプル
616 補間フィルタ
618 出力
620 予測ブロック
622 出力
624 イントラ予測ブロック
626 イントラ予測パラメータ
700 ブロック
702 隣接するブロック
800 ブロック
802 隣接するブロック
804 BU
900 方法
1000 方法
1100 ブロック
1102 隣接ブロック
1104 中間BU
1200 ブロック
1202 隣接ブロック
1204 BU
1300 ブロック
1302 BU
1304 (左側からの)参照サンプル
1306 (上側からの)参照サンプル
1400 符号化方法
1500 符号化方法
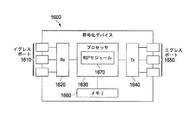
1600 符号化デバイス
1610 イングレスポート
1620 受信機ユニット
1630 プロセッサ
1640 送信機ユニット
1650 エグレスポート
1660 メモリ
1670 参照サンプル処理(RSP)モジュール
Claims (20)
- 復号デバイスによって実施される符号化方法であって、
前記復号デバイスによって、現在のブロックの予測方向を決定するステップと、
前記復号デバイスによって、前記予測方向に沿った伝播距離を決定するステップであって、前記伝播距離が、前記現在のブロックにおける予測対象の画素と前記現在のブロックに隣接する参照サンプルとの間で測定される、ステップと、
前記復号デバイスによって、前記伝播距離に基づいて、複数のフィルタ係数のうちの1つを選択するステップと、
前記復号デバイスによって、フィルタおよび選択された、前記複数のフィルタ係数のうちの1つを使用して、前記現在のブロックにおける前記画素を予測するステップと、
電子デバイスのディスプレイ上に、予測された前記画素を含む画像を表示するステップと、
を含む、方法。 - 選択された、前記フィルタ係数のうちの1つの強度が、決定された前記伝播距離に基づく、請求項1に記載の方法。
- 前記複数のフィルタ係数が、弱から強までのフィルタ係数の範囲を含む、請求項1に記載の方法。
- 前記フィルタ係数の範囲が、より短い伝播距離に対応するより弱いフィルタ係数と、より長い伝播距離に対応するより強いフィルタ係数と、を含む、請求項3に記載の方法。
- 前記予測方向が水平または垂直である、請求項1に記載の方法。
- 前記予測方向が斜めである、請求項1に記載の方法。
- 前記フィルタが平滑化フィルタである、請求項1に記載の方法。
- 前記フィルタが鮮鋭化フィルタである、請求項1に記載の方法。
- 伝播距離の範囲を前記複数のフィルタ係数にマッピングするテーブルを前記復号デバイスのメモリに格納するステップをさらに含む、請求項1に記載の方法。
- 符号化デバイスによって実施される符号化方法であって、
前記符号化デバイスによって、現在のブロックの予測方向を決定するステップと、
前記符号化デバイスによって、前記予測方向に沿った伝播距離を決定するステップであって、前記伝播距離が、前記現在のブロックにおける予測対象の画素と前記現在のブロックに隣接する参照サンプルとの間で測定される、ステップと、
前記符号化デバイスによって、前記伝播距離に基づいて、複数のフィルタ係数のうちの1つを選択するステップと、
前記符号化デバイスによって、フィルタおよび選択された、前記複数のフィルタ係数のうちの1つを使用して、前記現在のブロックにおける前記画素を予測するステップと、
前記符号化デバイスによって、前記画素を含む画像を含むビットストリームを、前記ビットストリームを復号するように構成された復号デバイスに送信するステップと、
を含む、方法。 - 選択された、前記フィルタ係数のうちの1つの強度が、決定された前記伝播距離に基づく、請求項10に記載の方法。
- 前記複数のフィルタ係数が、弱から強までのフィルタ係数の範囲を含む、請求項10に記載の方法。
- 前記フィルタ係数の範囲が、より短い伝播距離に対応するより弱いフィルタ係数と、より長い伝播距離に対応するより強いフィルタ係数と、を含む、請求項12に記載の方法。
- 前記予測方向が斜めである、請求項10に記載の方法。
- 前記フィルタが平滑化フィルタである、請求項10に記載の方法。
- 前記フィルタが鮮鋭化フィルタである、請求項10に記載の方法。
- 符号化デバイスからのビットストリームを受信するように構成された受信機であって、前記ビットストリームが画像を含む、受信機と、
前記受信機に結合されたプロセッサであって、前記プロセッサが、
前記画像内から現在のブロックを選択し、
前記現在のブロックの予測方向を決定し、
前記予測方向に沿った伝播距離を決定し、前記伝播距離が、前記現在のブロックにおける予測対象の画素と前記現在のブロックに隣接する参照サンプルとの間で測定され、
前記伝播距離に基づいて、複数のフィルタ係数のうちの1つを選択し、
フィルタおよび選択された、前記複数のフィルタ係数のうちの1つを使用して、前記現在のブロックにおける前記画素を予測する
ように構成される、プロセッサと、
前記プロセッサに動作可能に結合されたディスプレイであって、前記ディスプレイが、予測された前記画素を含む画像を表示するように構成される、ディスプレイと、
を備える、復号デバイス。 - 選択された、前記フィルタ係数のうちの1つの強度が、決定された前記伝播距離に基づく、請求項17に記載の復号デバイス。
- 前記複数のフィルタ係数が、弱から強までのフィルタ係数の範囲を含み、前記フィルタ係数の範囲が、より短い伝播距離に対応するより弱いフィルタ係数と、より長い伝播距離に対応するより強いフィルタ係数と、を含む、請求項17に記載の復号デバイス。
- 前記プロセッサに結合されたメモリであって、前記メモリが、伝播距離の範囲を前記複数のフィルタ係数にマッピングするテーブルを格納するように構成される、メモリをさらに備える、請求項17に記載の復号デバイス。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762481525P | 2017-04-04 | 2017-04-04 | |
| US62/481,525 | 2017-04-04 | ||
| US15/943,853 | 2018-04-03 | ||
| US15/943,853 US10728548B2 (en) | 2017-04-04 | 2018-04-03 | Processing reference samples used for intra-prediction of a picture block |
| PCT/CN2018/081808 WO2018184542A1 (en) | 2017-04-04 | 2018-04-04 | Processing reference samples used for intra-prediction of a picture block |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020509714A true JP2020509714A (ja) | 2020-03-26 |
| JP2020509714A5 JP2020509714A5 (ja) | 2020-05-07 |
Family
ID=63671145
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019548616A Pending JP2020509714A (ja) | 2017-04-04 | 2018-04-04 | ピクチャブロックのイントラ予測に使用される参照サンプルの処理 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10728548B2 (ja) |
| EP (1) | EP3566443A4 (ja) |
| JP (1) | JP2020509714A (ja) |
| KR (1) | KR20190110599A (ja) |
| CN (1) | CN110199522B (ja) |
| TW (1) | TWI678918B (ja) |
| WO (1) | WO2018184542A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019041165A (ja) | 2017-08-23 | 2019-03-14 | 富士通株式会社 | 画像符号化装置、画像復号装置、画像処理方法、及び画像処理プログラム |
| CN118338018A (zh) * | 2017-11-22 | 2024-07-12 | 英迪股份有限公司 | 图像解码方法、图像编码方法和非暂态计算机可读记录介质 |
| CN112119638A (zh) * | 2018-05-14 | 2020-12-22 | 交互数字Vc控股公司 | 用于四叉树-二叉树的块形状自适应帧内预测方向 |
| US11218716B2 (en) | 2018-07-13 | 2022-01-04 | Telefonaktiebolaget Lm Ericsson (Publ) | Transform selection in a video encoder and/or video decoder |
| KR20210028652A (ko) | 2018-07-16 | 2021-03-12 | 인터디지털 브이씨 홀딩스 인코포레이티드 | 광각 인트라 예측 및 위치 의존적 인트라 예측 조합 |
| WO2020060449A1 (en) * | 2018-09-23 | 2020-03-26 | Huawei Technologies Co., Ltd. | Method and apparatus for intra reference sample interpolation filter switching |
| US20200213595A1 (en) * | 2018-12-31 | 2020-07-02 | Comcast Cable Communications, Llc | Methods, Systems, And Apparatuses For Adaptive Processing Of Non-Rectangular Regions Within Coding Units |
| CN113302929A (zh) * | 2019-06-24 | 2021-08-24 | 华为技术有限公司 | 几何分割模式的样本距离计算 |
| WO2021043138A1 (en) * | 2019-09-02 | 2021-03-11 | Huawei Technologies Co., Ltd. | An encoder, a decoder and corresponding methods of filter modification on general intra prediction process |
| WO2022037583A1 (en) * | 2020-08-21 | 2022-02-24 | Alibaba Group Holding Limited | Systems and methods for intra prediction smoothing filter |
| CN113259669B (zh) * | 2021-03-25 | 2023-07-07 | 浙江大华技术股份有限公司 | 编码方法、装置、电子设备及计算机可读存储介质 |
| MX2023011306A (es) * | 2021-03-31 | 2023-10-05 | Ericsson Telefon Ab L M | Prediccion de superficies suaves. |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007063808A1 (ja) * | 2005-11-30 | 2007-06-07 | Kabushiki Kaisha Toshiba | 画像符号化/画像復号化方法及び画像符号化/画像復号化装置 |
| US20120027313A1 (en) * | 2010-07-30 | 2012-02-02 | Microsoft Corporation | Line and pixel based methods for intra frame coding |
| US20120140821A1 (en) * | 2010-12-07 | 2012-06-07 | Virginie Drugeon | Pixel adaptive intra smoothing |
| WO2012096150A1 (ja) * | 2011-01-12 | 2012-07-19 | 三菱電機株式会社 | 動画像符号化装置、動画像復号装置、動画像符号化方法及び動画像復号方法 |
| JP2019534629A (ja) * | 2016-09-30 | 2019-11-28 | エルジー エレクトロニクス インコーポレイティド | 画像処理方法及びこのための装置 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008084378A2 (en) | 2007-01-09 | 2008-07-17 | Nokia Corporation | Adaptive interpolation filters for video coding |
| WO2008134482A1 (en) | 2007-04-26 | 2008-11-06 | Polycom, Inc. | De-blocking filter arrangements |
| JP5052301B2 (ja) * | 2007-11-21 | 2012-10-17 | オリンパス株式会社 | 画像処理装置、画像処理方法 |
| KR101460608B1 (ko) | 2008-03-04 | 2014-11-14 | 삼성전자주식회사 | 필터링된 예측 블록을 이용한 영상 부호화, 복호화 방법 및장치 |
| KR101682147B1 (ko) | 2010-04-05 | 2016-12-05 | 삼성전자주식회사 | 변환 및 역변환에 기초한 보간 방법 및 장치 |
| EP2375747B1 (en) | 2010-04-12 | 2019-03-13 | Sun Patent Trust | Filter positioning and selection |
| US9819966B2 (en) | 2010-09-01 | 2017-11-14 | Qualcomm Incorporated | Filter description signaling for multi-filter adaptive filtering |
| WO2012071417A1 (en) | 2010-11-24 | 2012-05-31 | Thomson Licensing | Adaptive loop filtering |
| US10142630B2 (en) | 2010-12-10 | 2018-11-27 | Texas Instruments Incorporated | Mode adaptive intra prediction smoothing in video coding |
| US20120183041A1 (en) | 2011-01-14 | 2012-07-19 | Sony Corporation | Interpolation filter for intra prediction of hevc |
| US20120230393A1 (en) | 2011-03-08 | 2012-09-13 | Sue Mon Thet Naing | Methods and apparatuses for encoding and decoding video using adaptive interpolation filter length |
| PT3471412T (pt) | 2011-04-25 | 2021-01-27 | Lg Electronics Inc | Processo de intra-predição para descodificação de vídeo e codificação de vídeo |
| KR20120140181A (ko) * | 2011-06-20 | 2012-12-28 | 한국전자통신연구원 | 화면내 예측 블록 경계 필터링을 이용한 부호화/복호화 방법 및 그 장치 |
| US9179148B2 (en) * | 2011-06-30 | 2015-11-03 | Futurewei Technologies, Inc. | Simplified bilateral intra smoothing filter |
| US9357235B2 (en) | 2011-10-13 | 2016-05-31 | Qualcomm Incorporated | Sample adaptive offset merged with adaptive loop filter in video coding |
| US9282344B2 (en) | 2011-11-04 | 2016-03-08 | Qualcomm Incorporated | Secondary boundary filtering for video coding |
| CN107071436A (zh) | 2011-11-08 | 2017-08-18 | 株式会社Kt | 对视频信号进行解码的方法 |
| CA2878440A1 (en) | 2012-07-06 | 2014-01-09 | Telefonaktiebolaget L M Ericsson (Publ) | Restricted intra deblocking filtering for video coding |
| US10182242B2 (en) * | 2013-12-27 | 2019-01-15 | Mediatek Inc. | Method and apparatus for palette coding with cross block prediction |
| EP3111645A1 (en) | 2014-02-26 | 2017-01-04 | Dolby Laboratories Licensing Corporation | Luminance based coding tools for video compression |
| BR112016013761B1 (pt) | 2014-05-23 | 2023-03-14 | Huawei Technologies Co., Ltd | Método e aparelho para reconstruir blocos de imagem utilizando predição, e meio de armazenamento legível por computador |
| US10425648B2 (en) * | 2015-09-29 | 2019-09-24 | Qualcomm Incorporated | Video intra-prediction using position-dependent prediction combination for video coding |
| WO2017068856A1 (ja) * | 2015-10-21 | 2017-04-27 | シャープ株式会社 | 予測画像生成装置、画像復号装置および画像符号化装置 |
| EP3363198B1 (en) | 2015-11-17 | 2020-09-16 | Huawei Technologies Co., Ltd. | Method and apparatus of adaptive filtering of samples for video coding |
| CN107925763B (zh) | 2015-12-23 | 2020-01-10 | 华为技术有限公司 | 等级分割中的块级别变换选择和隐式信令的编码变换方法和设备 |
-
2018
- 2018-04-03 US US15/943,853 patent/US10728548B2/en active Active
- 2018-04-04 EP EP18781619.4A patent/EP3566443A4/en not_active Withdrawn
- 2018-04-04 JP JP2019548616A patent/JP2020509714A/ja active Pending
- 2018-04-04 WO PCT/CN2018/081808 patent/WO2018184542A1/en unknown
- 2018-04-04 KR KR1020197024808A patent/KR20190110599A/ko not_active Application Discontinuation
- 2018-04-04 CN CN201880007962.6A patent/CN110199522B/zh active Active
- 2018-04-09 TW TW107112057A patent/TWI678918B/zh active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007063808A1 (ja) * | 2005-11-30 | 2007-06-07 | Kabushiki Kaisha Toshiba | 画像符号化/画像復号化方法及び画像符号化/画像復号化装置 |
| US20120027313A1 (en) * | 2010-07-30 | 2012-02-02 | Microsoft Corporation | Line and pixel based methods for intra frame coding |
| US20120140821A1 (en) * | 2010-12-07 | 2012-06-07 | Virginie Drugeon | Pixel adaptive intra smoothing |
| WO2012096150A1 (ja) * | 2011-01-12 | 2012-07-19 | 三菱電機株式会社 | 動画像符号化装置、動画像復号装置、動画像符号化方法及び動画像復号方法 |
| JP2019534629A (ja) * | 2016-09-30 | 2019-11-28 | エルジー エレクトロニクス インコーポレイティド | 画像処理方法及びこのための装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110199522A (zh) | 2019-09-03 |
| TWI678918B (zh) | 2019-12-01 |
| KR20190110599A (ko) | 2019-09-30 |
| WO2018184542A1 (en) | 2018-10-11 |
| US10728548B2 (en) | 2020-07-28 |
| EP3566443A4 (en) | 2020-01-15 |
| US20180288413A1 (en) | 2018-10-04 |
| CN110199522B (zh) | 2021-07-09 |
| EP3566443A1 (en) | 2019-11-13 |
| TW201842776A (zh) | 2018-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102288109B1 (ko) | 비디오 압축에서의 양방향 예측 | |
| JP2020509714A (ja) | ピクチャブロックのイントラ予測に使用される参照サンプルの処理 | |
| KR102483942B1 (ko) | 비디오 인코더, 비디오 디코더 및 대응하는 인코딩 및 디코딩 방법 | |
| US10477232B2 (en) | Search region determination for intra block copy in video coding | |
| JP6542225B2 (ja) | イントラブロックコピーのための残差予測 | |
| KR20200108431A (ko) | 비디오 코딩에서의 디블록킹 필터 선택 및 적용 | |
| JP2020501434A (ja) | ビデオコーディングにおけるバイラテラルフィルタ使用のインジケーション | |
| JP7423647B2 (ja) | 異なるクロマフォーマットを使用した三角予測ユニットモードでのビデオコーディング | |
| CN111866510A (zh) | 视频序列的帧内预测方法及装置 | |
| JP2018511232A (ja) | 非正方形区分を使用してビデオデータを符号化するための最適化 | |
| JP2023052019A (ja) | ルマ・イントラ・モード・シグナリング | |
| JP2024116271A (ja) | ビデオ符号化における境界ブロックのパーティション分割 | |
| JP7477687B2 (ja) | ビデオコーディングのための変換ユニット区分方法 | |
| CN117857797A (zh) | 由视频解码器实现的解码方法及其相关装置和存储介质 | |
| JP7571266B2 (ja) | ビデオ符号器、ビデオ復号器、並びに対応する符号化及び復号化方法 | |
| KR20240152970A (ko) | 비디오 인코더, 비디오 디코더 및 대응하는 인코딩 및 디코딩 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190906 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190906 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201012 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210524 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210824 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20211213 |