JP2020049179A - 振動刺激装置 - Google Patents
振動刺激装置 Download PDFInfo
- Publication number
- JP2020049179A JP2020049179A JP2018184665A JP2018184665A JP2020049179A JP 2020049179 A JP2020049179 A JP 2020049179A JP 2018184665 A JP2018184665 A JP 2018184665A JP 2018184665 A JP2018184665 A JP 2018184665A JP 2020049179 A JP2020049179 A JP 2020049179A
- Authority
- JP
- Japan
- Prior art keywords
- finger
- support member
- palm
- vibration
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000004936 stimulating effect Effects 0.000 claims description 40
- 238000003780 insertion Methods 0.000 claims description 8
- 230000037431 insertion Effects 0.000 claims description 8
- 230000000638 stimulation Effects 0.000 claims description 7
- 241000905957 Channa melasoma Species 0.000 abstract 1
- 210000001142 back Anatomy 0.000 abstract 1
- 230000002401 inhibitory effect Effects 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 18
- 208000008238 Muscle Spasticity Diseases 0.000 description 8
- 230000003750 conditioning effect Effects 0.000 description 8
- 208000018198 spasticity Diseases 0.000 description 8
- 210000000707 wrist Anatomy 0.000 description 8
- 210000000245 forearm Anatomy 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 230000033001 locomotion Effects 0.000 description 5
- 210000003205 muscle Anatomy 0.000 description 5
- 238000000034 method Methods 0.000 description 4
- 208000026106 cerebrovascular disease Diseases 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000007774 longterm Effects 0.000 description 3
- 230000011514 reflex Effects 0.000 description 3
- 230000001148 spastic effect Effects 0.000 description 3
- 230000006872 improvement Effects 0.000 description 2
- 238000001584 occupational therapy Methods 0.000 description 2
- 238000000554 physical therapy Methods 0.000 description 2
- 208000020431 spinal cord injury Diseases 0.000 description 2
- 206010008111 Cerebral haemorrhage Diseases 0.000 description 1
- 206010020843 Hyperthermia Diseases 0.000 description 1
- 208000019430 Motor disease Diseases 0.000 description 1
- 206010049816 Muscle tightness Diseases 0.000 description 1
- 208000006011 Stroke Diseases 0.000 description 1
- 230000001663 anti-spastic effect Effects 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 206010008118 cerebral infarction Diseases 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 208000035475 disorder Diseases 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 210000003414 extremity Anatomy 0.000 description 1
- 230000036031 hyperthermia Effects 0.000 description 1
- 239000003112 inhibitor Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000007659 motor function Effects 0.000 description 1
- 210000002161 motor neuron Anatomy 0.000 description 1
- 230000004118 muscle contraction Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 210000002435 tendon Anatomy 0.000 description 1
- 230000001256 tonic effect Effects 0.000 description 1
Images





















Landscapes
- Rehabilitation Tools (AREA)
Abstract
Description
被施療者の掌を支持し、第2の回転軸を中心に独立して回転可能である掌支持部材と、
前記指支持部材及び/または前記掌支持部材に保持された振動体と、
手背側から前記被施療者の指及び/または掌を前記振動体に押し付けて固定するための押し付け部と、
前記指支持部材及び前記掌支持部材の回転を同時に抑制する固定手段と、を備えた振動刺激装置を提供するものである。
前記第1の回転軸と前記第2の回転軸は一致していてもよい。
前記指支持部材及び前記掌支持部材はそれぞれ複数の挿入部を備え、
前記固定手段は、前記指支持部材及び前記掌支持部材の前記挿入部に挿入部材を挿入することで、前記指支持部材と前記掌支持部材の回転を抑制してもよい。
前記固定手段は、前記第1の回転軸および前記第2の回転軸に軸方向から力を加えることで、前記指支持部材と前記掌支持部材の回転を抑制してもよい。
図1を用いて、本実施の形態に係る振動刺激装置の概略を説明する。本実施の形態に係る振動刺激装置1は、たとえば脳梗塞、脳出血などの脳血管障害や脊髄損傷等により生じた筋緊張(痙縮)を和らげるために、痙縮患者の手指部に振動刺激を与えるために用いられる。振動刺激装置1は、図1に示すように、上腕に振動刺激を与える上腕刺激部2と前腕に振動刺激を与える前腕刺激部3と手指に振動刺激を与える手指刺激部4と前腕を乗せて支える前腕支持部5を備える。
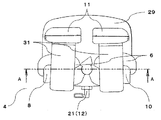
前記駒16、19に有する複数の孔17と複数の穴20はスリット構造とし、前記固定手段12は板形状等の挿入部材などでもよい。
図21〜23を用いて、本形態に係る振動刺激装置の使用例を説明する。
2 上腕刺激部
3 前腕刺激部
4 手指刺激部
5 前腕支持部
6 振動体
7 第1の回転軸
8 指支持部材
9 第2の回転軸
10 掌支持部材
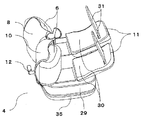
11 押し付け部
12 固定手段
13 回転部(指)
14 回転部(掌)
15 軸棒(指)
16 駒(指)
17 複数の孔(指)
18 軸棒(掌)
19 駒(掌)
20 複数の穴(掌)
21 プランジャ
22 スリット(指)
23 スリット(掌)
24 板形状の挿入部材
25 固定手段
26 レバー
27 押さえつけ部
28 回転軸
29 手指刺激部4の手を乗せる土台
30 当接面
31 固定具
32 接続部
33 角度調節機構
34 回転軸
35 支持台
36 弾性部材
37 押さえ部
38 手指
39 軸孔(指)
40 軸孔(掌)
41 回転部(指)
42 回転部(掌)
43 軸孔(指)
44 軸孔(掌)
45 軸棒(指)
46 軸棒(掌)
47 駒(指)
48 駒(掌)
49 複数の孔(指)
50 複数の孔(掌)
51 薄板部(指)
52 薄板部(掌)
53 空洞部
54 プランジャ
55 駒(指)
56 駒(掌)
57 駒(指)
58 駒(掌)
Claims (4)
- 被施療者の指を支持し、第1の回転軸を中心に独立して回転可能である指支持部材と、
被施療者の掌を支持し、第2の回転軸を中心に独立して回転可能である掌支持部材と、
前記指支持部材及び/または前記掌支持部材に保持された振動体と、
手背側から前記被施療者の指及び/または掌を前記振動体に押し付けて固定するための押し付け部と、
前記指支持部材及び前記掌支持部材の回転を同時に抑制する固定手段と、を備えた振動刺激装置。 - 前記第1の回転軸と前記第2の回転軸は一致している、請求項1に記載の振動刺激装置。
- 前記指支持部材及び前記掌支持部材はそれぞれ複数の挿入部を備え、
前記固定手段は、前記指支持部材及び前記掌支持部材の前記挿入部に挿入部材を挿入することで、前記指支持部材と前記掌支持部材の回転を抑制する、請求項1または2に記載の振動刺激装置。 - 前記固定手段は、前記第1の回転軸および前記第2の回転軸に軸方向から力を加えることで、前記指支持部材と前記掌支持部材の回転を抑制する、請求項1または2に記載の振動刺激装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018184665A JP2020049179A (ja) | 2018-09-28 | 2018-09-28 | 振動刺激装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018184665A JP2020049179A (ja) | 2018-09-28 | 2018-09-28 | 振動刺激装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020049179A true JP2020049179A (ja) | 2020-04-02 |
| JP2020049179A5 JP2020049179A5 (ja) | 2021-09-02 |
Family
ID=69994806
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018184665A Pending JP2020049179A (ja) | 2018-09-28 | 2018-09-28 | 振動刺激装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020049179A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11625994B2 (en) | 2014-05-16 | 2023-04-11 | Not Impossible, Llc | Vibrotactile control systems and methods |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000175946A (ja) * | 1998-12-17 | 2000-06-27 | Toshio Sugawara | 手指矯正器具 |
| JP2004313768A (ja) * | 2003-04-01 | 2004-11-11 | Daisaku Tokunaga | 伸展・屈曲補助機能付装具 |
| JP2013017718A (ja) * | 2011-07-13 | 2013-01-31 | R-Techs:Kk | 手指リハビリ装置 |
| US20130116606A1 (en) * | 2010-07-12 | 2013-05-09 | Oregon Health & Science University | Method and device for reducing symptomatic relapse of spasticity |
| US9446288B1 (en) * | 2013-01-28 | 2016-09-20 | Steven E. Pazan | Exercise and therapy device having SPNRED material |
| CN206463444U (zh) * | 2016-07-22 | 2017-09-05 | 绍兴文理学院 | 一种脑卒中患者用腕关节锻炼器 |
-
2018
- 2018-09-28 JP JP2018184665A patent/JP2020049179A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000175946A (ja) * | 1998-12-17 | 2000-06-27 | Toshio Sugawara | 手指矯正器具 |
| JP2004313768A (ja) * | 2003-04-01 | 2004-11-11 | Daisaku Tokunaga | 伸展・屈曲補助機能付装具 |
| US20130116606A1 (en) * | 2010-07-12 | 2013-05-09 | Oregon Health & Science University | Method and device for reducing symptomatic relapse of spasticity |
| JP2013017718A (ja) * | 2011-07-13 | 2013-01-31 | R-Techs:Kk | 手指リハビリ装置 |
| US9446288B1 (en) * | 2013-01-28 | 2016-09-20 | Steven E. Pazan | Exercise and therapy device having SPNRED material |
| CN206463444U (zh) * | 2016-07-22 | 2017-09-05 | 绍兴文理学院 | 一种脑卒中患者用腕关节锻炼器 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11625994B2 (en) | 2014-05-16 | 2023-04-11 | Not Impossible, Llc | Vibrotactile control systems and methods |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10406065B2 (en) | Device for delivery of resonant frequencies to treated muscles | |
| Ma et al. | Comparing biofeedback with active exercise and passive treatment for the management of work-related neck and shoulder pain: a randomized controlled trial | |
| US6878122B2 (en) | Method and device for rehabilitation of motor dysfunction | |
| RU2648860C2 (ru) | Вибрационная система и способ для стимуляции тела человека посредством создания проприоцептивного резонанса | |
| US20130116606A1 (en) | Method and device for reducing symptomatic relapse of spasticity | |
| EA034480B1 (ru) | Устройство для тренировки шеи | |
| EP2370042B1 (en) | Method of passive mechanotherapy and exercise machine for implementation thereof | |
| JP2020049179A (ja) | 振動刺激装置 | |
| Xia et al. | A comparison of the effects of imposed extension and flexion movements on Parkinsonian rigidity | |
| US10195097B1 (en) | Neuromuscular plasticity apparatus and method using same | |
| US10799416B2 (en) | Self-treating upper neck system for therapeutic mobilization | |
| WO2018180399A1 (ja) | 振動刺激装置 | |
| Aprile et al. | Muscle focal vibration in healthy subjects: evaluation of the effects on upper limb motor performance measured using a robotic device | |
| Ribot-Ciscar et al. | Sensory training with vibration-induced kinesthetic illusions improves proprioceptive integration in patients with Parkinson's disease | |
| US11576807B2 (en) | Method of treating pain | |
| WO2018180400A1 (ja) | 振動刺激装置 | |
| Komura et al. | Degree of muscle-and-tendon tonus effects on kinesthetic illusion in wrist joints toward advanced rehabilitation robotics | |
| Levine et al. | Proprioceptive facilitation of voluntary motion in man | |
| RU2408354C2 (ru) | Способ лечения детского церебрального паралича | |
| JP2020049179A5 (ja) | ||
| RU2179009C2 (ru) | Способ и устройство для реабилитации нервной, мышечной и двигательной координации больных с нарушениями центральной нервной системы | |
| CN219000786U (zh) | 一种肩关节外展支架 | |
| JP7339659B2 (ja) | 肩頸部位の緩癒装置 | |
| US20130289453A1 (en) | Method and apparatus for improving neuromuscular performances | |
| Lee | A study on an effective method to apply upper limb rehabilitation treatment to stroke patients. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210706 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210706 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220329 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220913 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230207 |