JP2020003230A - Resolver - Google Patents
Resolver Download PDFInfo
- Publication number
- JP2020003230A JP2020003230A JP2018120170A JP2018120170A JP2020003230A JP 2020003230 A JP2020003230 A JP 2020003230A JP 2018120170 A JP2018120170 A JP 2018120170A JP 2018120170 A JP2018120170 A JP 2018120170A JP 2020003230 A JP2020003230 A JP 2020003230A
- Authority
- JP
- Japan
- Prior art keywords
- resolver
- coil
- rotor
- core
- stator core
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Abstract
Description
本発明は、レゾルバに関するものである。 The present invention relates to a resolver.
例えば、ブラシレスモータは、ロータの回転位置を検出し、この検出結果に基づいてステータに供給する電流の制御を行う。ロータの回転位置を検出する手段として、例えば、レゾルバが用いられる。レゾルバの中でも、いわゆるシートコイル型レゾルバと称されるものがある。このものは、モータケース等に固定される板状のステータコアと、ロータの回転軸に固定され、ステータコアと軸方向で対向する板状のロータコアと、を備えている。 For example, a brushless motor detects the rotational position of a rotor and controls the current supplied to the stator based on the detection result. As a means for detecting the rotational position of the rotor, for example, a resolver is used. Among the resolvers, there is a so-called sheet coil type resolver. This includes a plate-shaped stator core fixed to a motor case or the like, and a plate-shaped rotor core fixed to a rotating shaft of a rotor and facing the stator core in the axial direction.
ステータコアのロータコアとの対向面には、径方向中央に配置されたステータトランスコイルと、ステータトランスコイルの周囲を取り囲むように、このステータトランスコイルと同心円上に配置された励磁コイル(レゾルバステータコイル部)と、が設けられている。ステータトランスコイルと励磁コイルとは、電気的に遮断されている。 On the surface of the stator core facing the rotor core, a stator transformer coil disposed at the center in the radial direction and an exciting coil (resolver stator coil portion) disposed concentrically with the stator transformer coil so as to surround the stator transformer coil. ) And are provided. The stator transformer coil and the excitation coil are electrically disconnected.
一方、ロータコアのステータコアとの対向面には、径方向中央に配置され、ステータトランスコイルと軸方向で対向するロータトランスコイルと、ロータトランスコイルの周囲を取り囲むように、このロータトランスコイルと同心円上に配置された検出コイル(レゾルバロータコイル)と、が設けられている。ロータトランスコイルと検出コイルとは、直列に接続されている。 On the other hand, on the surface of the rotor core facing the stator core, the rotor transformer coil is disposed at the center in the radial direction, and faces the stator transformer coil in the axial direction. And a detection coil (resolver rotor coil) disposed at the same position. The rotor transformer coil and the detection coil are connected in series.
このような構成のもと、外部電力により励磁コイルに高周波の入力信号(電圧)を印可して交番電流を流すとステータに交番磁束が発生する。この交番磁束により、検出コイルに誘起電圧が生じ(電磁誘導が生じ)、交番電流が流れる。この交番電流は、ロータトランスコイルへと供給され、ロータトランスコイルが設けられている箇所に交番磁束が発生する。この交番磁束により、ステータトランスコイルに誘起電圧が生じる。 In such a configuration, when a high-frequency input signal (voltage) is applied to the exciting coil by external power and an alternating current flows, an alternating magnetic flux is generated in the stator. Due to this alternating magnetic flux, an induced voltage is generated in the detection coil (electromagnetic induction is generated), and an alternating current flows. This alternating current is supplied to the rotor transformer coil, and an alternating magnetic flux is generated at a position where the rotor transformer coil is provided. The alternating magnetic flux generates an induced voltage in the stator transformer coil.
ここで、ロータが回転することにより、励磁コイルに印加する入力信号と、ステータトランスコイルの出力信号(電圧)に位相差が生じる。この位相差を検出することにより、ロータの回転位置を検出することができる。 Here, the rotation of the rotor causes a phase difference between the input signal applied to the excitation coil and the output signal (voltage) of the stator transformer coil. By detecting this phase difference, the rotational position of the rotor can be detected.
同一のコア上で励磁コイルとステータトランスコイルを形成すると、励磁コイルで生じた交番磁束がステータトランスコイルに影響する。この影響を抑えるため、励磁コイルとステータトランスコイルの間のコアに、隙間を設ける従来技術が開示されている。 When the exciting coil and the stator transformer coil are formed on the same core, the alternating magnetic flux generated in the exciting coil affects the stator transformer coil. In order to suppress this effect, a conventional technique has been disclosed in which a gap is provided in a core between an excitation coil and a stator transformer coil.
ところで、励磁コイルで交番磁束を生じさせると、その磁束変化に伴って励磁コイル周囲のステータコアに渦電流が生じる。また、励磁コイルの交番磁束は、対向する検出コイルを通るため、ロータコアの検出コイルの周囲のロータコアにも渦電流を生じる。さらに、検出コイルに直列接続されているロータトランスコイルに生じた交番磁束によって、ロータトランスコイルの周囲のロータコア、及びロータトランスコイルと対向するステータトランスコイルの周囲のステータコアにも渦電流が生じる。これらの渦電流は、コイルに生じる電流変化を妨げる向きに磁束が生じる。このため、励磁コイルやロータトランスコイルで発生させたい交番磁束や、検出コイルで生じる電流を低減させてしまう。その結果としてステータトランスコイルから得られる出力信号を減衰させる。 By the way, when an alternating magnetic flux is generated in the exciting coil, an eddy current is generated in the stator core around the exciting coil with the change in the magnetic flux. Further, since the alternating magnetic flux of the excitation coil passes through the opposed detection coil, an eddy current also occurs in the rotor core around the detection coil of the rotor core. Further, an eddy current is generated in the rotor core around the rotor transformer coil and the stator core around the stator transformer coil facing the rotor transformer coil due to the alternating magnetic flux generated in the rotor transformer coil connected in series to the detection coil. These eddy currents generate a magnetic flux in a direction that hinders a current change occurring in the coil. For this reason, the alternating magnetic flux desired to be generated by the excitation coil and the rotor transformer coil and the current generated by the detection coil are reduced. As a result, the output signal obtained from the stator transformer coil is attenuated.
上述の従来技術にあっては、励磁コイルとステータトランスコイルとの間に隙間を設け、両者を磁気的に分離することで、共通コア(ステータコア)を介して磁束が干渉しないという点では優れているが、各コイルの周囲のコアに生じる渦電流の影響を抑制することができない。このため、この渦電流に起因して、励磁コイルやロータトランスコイルで発生させる交番磁束が減少してしまい、信号が弱まることで、ロータの回転位置の検出精度を向上できない可能性があった。 The above-described prior art is excellent in that a gap is provided between the exciting coil and the stator transformer coil and both are magnetically separated, so that magnetic flux does not interfere via a common core (stator core). However, the influence of the eddy current generated in the core around each coil cannot be suppressed. For this reason, due to the eddy current, the alternating magnetic flux generated in the excitation coil and the rotor transformer coil is reduced, and the signal is weakened, so that the detection accuracy of the rotational position of the rotor may not be improved.
また、上述の従来技術において、励磁コイル及び検出コイルが設けられているコアと、各トランスコイルが設けられているコアとを磁気的に分離するために、各コアに設ける溝やスリットの幅の大きさを、十分な大きさに設定する必要がある。この分、レゾルバが大型化してしまったり、製造コストが増大したりする可能性があった。 Further, in the above-described conventional technology, in order to magnetically separate the core provided with the excitation coil and the detection coil from the core provided with each transformer coil, the width of the groove or slit provided in each core is reduced. The size needs to be set to a sufficient size. Accordingly, there is a possibility that the resolver becomes large and the manufacturing cost increases.
そこで、本発明は、ロータの回転位置の検出精度を効果的に向上でき、かつ小型化、低コスト化を図ることができるレゾルバを提供する。 Therefore, the present invention provides a resolver that can effectively improve the accuracy of detecting the rotational position of the rotor, and can reduce the size and cost.
上記の課題を解決するために、本発明に係るレゾルバは、ステータコアと、前記ステータコアに対して回転可能に設けられ、回転軸線方向で前記ステータコアと対向するロータコアと、前記ステータコアに設けられた第1トランスコイルと、前記ロータコアに設けられ、前記第1トランスコイルと対向する第2トランスコイルと、前記ステータコアに設けられ前記第1トランスコイルと同心円上に設けられた励磁コイルと、前記ロータコアに設けられ、かつ前記励磁コイルと対向する検出コイルと、を備え、前記ステータコア、及び前記ロータコアの少なくともいずれか一方で、かつ少なくとも前記第1トランスコイル、前記第2トランスコイル、前記励磁コイル、及び前記検出コイルが配置されている箇所の一部に重なる領域に、前記ステータコア、及び前記ロータコアよりも電気抵抗が高く、渦電流の流れを阻害する抵抗部が少なくとも1つ設けられていることを特徴とする。 In order to solve the above problems, a resolver according to the present invention includes a stator core, a rotor core rotatably provided with respect to the stator core, and a rotor core facing the stator core in a rotation axis direction, and a first core provided on the stator core. A transformer coil, a second transformer coil provided on the rotor core and facing the first transformer coil, an exciting coil provided on the stator core and provided concentrically with the first transformer coil, and a second transformer coil provided on the rotor core. And a detection coil facing the excitation coil, and at least one of the stator core and the rotor core, and at least the first transformer coil, the second transformer coil, the excitation coil, and the detection coil. In the area that partially overlaps the place where Stator core, and the higher electrical resistance than the rotor core, the resistance unit that inhibits the flow of eddy currents, characterized in that it is provided at least one.
このように、ステータコア、及びロータコアの少なくともいずれか一方に前記抵抗部を設けることにより、ステータコア、又はロータコアに生じる渦電流の大きさを小さくすることができる。このため、渦電流に起因して、各トランスコイル、励磁コイル、及び検出コイルの少なくともいずれかのコイルで形成される交番磁束が減少してしまうことを抑制できる。よって、ロータの回転位置の検出精度を効果的に向上できる。 As described above, by providing the resistance portion on at least one of the stator core and the rotor core, the magnitude of the eddy current generated in the stator core or the rotor core can be reduced. For this reason, it is possible to suppress a decrease in the alternating magnetic flux formed by at least one of the transformer coil, the exciting coil, and the detection coil due to the eddy current. Therefore, the detection accuracy of the rotational position of the rotor can be effectively improved.
本発明に係るレゾルバにおいて、前記抵抗部は、前記ロータコアの回転軸線方向に直交する径方向に沿って形成されていることを特徴とする。
また、前記抵抗部は、前記ロータコアの回転方向に沿うように、回転軸線方向からみて湾曲形成されていてもよい。
In the resolver according to the present invention, the resistance portion is formed along a radial direction orthogonal to a rotation axis direction of the rotor core.
Further, the resistance portion may be curved so as to be along a rotation direction of the rotor core when viewed from a rotation axis direction.
このように構成することで、抵抗部によって、各コアのいずれかに生じる渦電流を効果的に減少できる。このため、確実にロータの回転位置の検出精度を向上できる。 With such a configuration, the eddy current generated in any of the cores can be effectively reduced by the resistance portion. For this reason, the detection accuracy of the rotational position of the rotor can be reliably improved.
本発明に係るレゾルバにおいて、前記ステータコア、及び前記ロータコアは、板状に形成されており、前記抵抗部は、前記ステータコア、及び前記ロータコアの少なくともいずれかに形成されたスリットであることを特徴とする。
また、前記抵抗部は、前記ステータコア、及び前記ロータコアの少なくともいずれかに形成された凹部であってもよい。
In the resolver according to the present invention, the stator core and the rotor core are formed in a plate shape, and the resistance portion is a slit formed in at least one of the stator core and the rotor core. .
Further, the resistance portion may be a concave portion formed in at least one of the stator core and the rotor core.
このように、凹部やスリットのような簡素な構造で抵抗部を形成することができる。このため、レゾルバの製造コストをさらに低減できる。 In this manner, the resistance portion can be formed with a simple structure such as a concave portion or a slit. Therefore, the manufacturing cost of the resolver can be further reduced.
本発明によれば、ステータコア、及びロータコアの少なくともいずれか一方に前記抵抗部を設けることにより、ステータコア、又はロータコアに生じる渦電流の大きさを小さくすることができる。このため、渦電流に起因して、各トランスコイル、励磁コイル、及び検出コイルの少なくともいずれかのコイルで形成される交番磁束が減少してしまうことを抑制できる。よって、ロータの回転位置の検出精度を効果的に向上できる。 According to the present invention, the magnitude of the eddy current generated in the stator core or the rotor core can be reduced by providing the resistance portion in at least one of the stator core and the rotor core. For this reason, it is possible to suppress a decrease in the alternating magnetic flux formed by at least one of the transformer coil, the exciting coil, and the detection coil due to the eddy current. Therefore, the detection accuracy of the rotational position of the rotor can be effectively improved.
次に、本発明の実施形態を図面に基づいて説明する。 Next, an embodiment of the present invention will be described with reference to the drawings.
(第1実施形態)
(ブラシレスモータ)
図1は、本発明に係るレゾルバ6が設けられたブラシレスモータ1の軸方向に沿う断面図である。
図1に示すように、ブラシレスモータ1は、略有底筒状のモータケース2と、モータケース2の開口部2aを閉塞する略円板状のブラケット3と、モータケース2内に収納されているモータステータ4と、モータステータ4に対して回転自在に設けられたモータロータ5と、モータロータ5の回転位置を検出するレゾルバ6と、を備えている。
なお、以下の説明では、モータロータ5の回転軸線方向を単に軸方向、モータロータ5の回転方向を周方向、軸方向及び周方向に直交するモータロータ5の径方向を単に径方向、と称する。
(1st Embodiment)
(Brushless motor)
FIG. 1 is a cross-sectional view along the axial direction of a brushless motor 1 provided with a
As shown in FIG. 1, the brushless motor 1 includes a substantially bottomed
In the following description, the rotation axis direction of the
モータケース2の周壁2bには、内周面に、モータステータ4の外周面が嵌合固定されている。また、モータケース2の底壁2cには、径方向略中央に、モータステータ4側に向かって突出する軸受ハウジング7が設けられている。この軸受ハウジング7に、モータロータ5の回転軸13の一端13a側(図1における下側)を回転自在に支持するための軸受8が設けられている。
The outer peripheral surface of the
モータステータ4は、略円筒状のモータステータコア9を有している。このモータステータコア9の外周面が、モータケース2の周壁2bの内周面に嵌合されている。モータステータコア9は、プレス加工によって略環状に打ち抜いた金属板(電磁鋼板)を軸方向に積層してなる。しかしながら、モータステータコア9を、軟磁性粉を加圧成形して形成することも可能である。
The
モータステータコア9の内周面には、径方向内側に向かって突出する複数のティース10が周方向に並んで形成されている。これらティース10には、コイル10aが巻回されている。各コイル10aの端末部は、制御部を介して外部電源(いずれも不図示)に電気的に接続される。そして、不図示の制御部によって、各コイル10aに選択的に電流が供給される。各コイル10aに電流が供給されると、モータステータ4に所望の磁束が形成される。
A plurality of
ブラケット3の径方向略中央には、モータステータ4側に向かって突出する軸受ハウジング11が設けられている。軸受ハウジング11には、モータロータ5の回転軸13の他端13b側(図1における上側)を回転自在に支持するための軸受12が設けられている。
また、ブラケット3には、モータステータ4とは反対側の一面3aに、凹部3bが形成されている。この凹部3bに、レゾルバ6の一方を構成するレゾルバステータ21(図2参照)が固定されている。なお、レゾルバ6の詳細構造については、後述する。
At a substantially radial center of the
The
モータロータ5は、両端側が各軸受8,12に回転自在に支持されている回転軸13と、回転軸13のモータステータ4に対応する位置に固定されているモータロータコア14と、を備えている。
モータロータコア14は、略円柱状に形成されている。モータロータコア14は、プレス加工によって略環状に打ち抜いた金属板(電磁鋼板)を軸方向に積層してなる。しかしながら、モータロータコア14を、軟磁性粉を加圧成形して形成することも可能である。
The
The
モータロータ5は、不図示のマグネットを備えている。このマグネットの磁束とモータステータ4に形成される磁束との間で、磁気的な吸引力や反発力が生じ、モータロータ5が回転する。なお、モータロータ5は、マグネットを備えないものであってもよい。その場合、モータステータ4の磁束との間に生じる磁気的な吸引力によってモータロータ5が回転する。
また、モータロータコア14の径方向略中央には、軸方向に貫通する貫通孔14aが形成されている。この貫通孔14aに、回転軸13が、例えば圧入等により固定されている。
The
Further, a through hole 14a is formed substantially at the center in the radial direction of the
回転軸13のブラケット3側の他端13bは、軸受12を介して軸方向外側に突出されている。この突出した箇所に、レゾルバ6の他方を構成するレゾルバロータ22(図2参照)が固定されている。
The
(レゾルバ)
図2は、図1のA部拡大図である。なお、図2以降では、説明を分かりやすくするために、各部の縮尺を適宜変更して示している。
図2に示すように、レゾルバ6は、いわゆるシートコイル型レゾルバである。レゾルバ6は、ブラケット3に固定されている略円板状のレゾルバステータ21と、レゾルバステータ21のブラケット3とは反対側に所定間隔をあけて配置され、レゾルバステータ21と軸方向で対向する略円板状のレゾルバロータ22と、を備えている。
(Resolver)
FIG. 2 is an enlarged view of a portion A in FIG. In addition, in FIG. 2 and subsequent figures, the scale of each part is appropriately changed and shown for easy understanding.
As shown in FIG. 2, the
(レゾルバステータ)
レゾルバステータ21は、略円板状に形成されたレゾルバステータ部23を有している。このレゾルバステータ部23が、ブラケット3の凹部3bに接するように配置される。そして、ブラケット3に、レゾルバステータ21が固定されている。
レゾルバステータ部23の径方向略中央には、ブラケット3とは反対側に向かって円筒部24が突出形成されている。円筒部24の内径は、回転軸13の軸径よりも大きく設定されている。このような円筒部24を介し、レゾルバステータ21からレゾルバロータ22側に回転軸13の他端13bが突出されている。
(Resolver stator)
The
At a substantially radial center of the
レゾルバステータ部23のレゾルバロータ22との対向面23aには、円筒部24を避けた大部分に、軸方向からみて略円環状の凹部23bが形成されている。この凹部23bに、レゾルバステータコア25が配置されている。なお、凹部23bは、後述の励磁コイル29等の位置決めを容易にするために設けられており、レゾルバステータ部23は、平板であってもよい。
レゾルバステータコア25は磁性材料から成り、凹部23bの形状に対応するように、軸方向からみて略円環状に形成されている。すなわち、レゾルバステータコア25の径方向略中央には、円筒部24を挿通可能な開口部25aが形成されている。レゾルバステータコア25は、後述の励磁コイル29による交番磁束の形成効率を高めるためのものである。
On the
The
レゾルバステータコア25のレゾルバステータ部23とは反対側で、レゾルバロータ22と対向する一面25bには、第1絶縁シート26、及び第2絶縁シート27が順に積層されている。第1絶縁シート26、及び第2絶縁シート27は、レゾルバステータコア25の形状に対応するように、それぞれ略円環状に形成されている。すなわち、第1絶縁シート26、及び第2絶縁シート27には、各々径方向略中央に、円筒部24を挿通可能な開口部26a,27aが形成されている。また、第1絶縁シート26、及び第2絶縁シート27は、同一形状に形成されており、それぞれレゾルバステータコア25と同心円上に配置されている。
A first insulating
第2絶縁シート27には、励磁コイル29、及びステータトランスコイル30が形成されている。第1絶縁シート26は、第2絶縁シート27に形成されている励磁コイル29、及びステータトランスコイル30や図示しないトランスコイル30の渡り線と、レゾルバステータコア25との絶縁を確保するためのものである。
The
以下、レゾルバステータコア25、励磁コイル29、及びステータトランスコイル30の構成について詳述する。
Hereinafter, the configurations of the
まず、図3(a)、図3(b)に基づいて、励磁コイル29、及びステータトランスコイル30の構成について詳述する。
図3は、励磁コイル29の形成パターンを図2における矢印Y方向からみた平面図であって、(a)は、第2絶縁シート27におけるレゾルバロータ22側の表面27bを示し、(b)は、第2絶縁シート27における第1絶縁シート26側の裏面27c示している。なお、図3(b)において、レゾルバロータ22側から第2絶縁シート27をみると、本来裏面27c側は視認できないが、ここでは、第2絶縁シート27を透過してみているものとする。以下の図6で示す第3絶縁シート43、変形例の図16、図17で示す第2絶縁シート27、第3絶縁シート43も同様である。
First, the configurations of the
3A and 3B are plan views of the formation pattern of the
ここで、励磁コイル29は、互いに位相のずれたsin励磁コイル31と、cos励磁コイル32と、の2つの励磁コイル31,32により構成されている。これら励磁コイル31,32やステータトランスコイル30は、第2絶縁シート27に成膜処理等を施すことにより形成される。
Here, the
図3(a)に示すように、第2絶縁シート27の表面27bには、ステータトランスコイル30、及びsin励磁コイル31が形成されている。
ステータトランスコイル30は、第2絶縁シート27の開口部27aの周囲を取り囲むように、渦巻き状に形成されている。ステータトランスコイル30の両端末部30a,30bは、リード線等を介して制御部(いずれも不図示)に電気的に接続されている。
As shown in FIG. 3A, a
The
sin励磁コイル31は、ステータトランスコイル30の周囲を取り囲むように形成されている。sin励磁コイル31は、2極で構成されている。すなわち、sin励磁コイル31は、軸方向からみて略半円状の2つの渦巻きコイル33,34からなる。
2つの渦巻きコイル33,34のうちの一方の渦巻きコイル33は、大きい略半円状のループの内側に小さい略半円状のループが形成されるように、かつ内側のループほど円周角が小さくなるように形成されている。2つの渦巻きコイル33,34のうちの他方の渦巻きコイル34は、回転軸13の回転軸線を通る径方向の任意の直線に対し、一方の渦巻きコイル33と線対称や点対称(2回回転対称)に形成されている。なお、レゾルバ6の軸倍角をN(Nは2以上の整数)とすると、2N回転対称に形成するとよい。
The
One
また、2つの渦巻きコイル33,34は、直列に接続されている。すなわち、2つの渦巻きコイル33,34の各端末部33a,33b,34a,34bを、それぞれ径方向外側に位置する外側端末部33a,34aと径方向内側に位置する内側端末部33b,34bとしたとき、一方の渦巻きコイル33の内側端末部33bと他方の渦巻きコイル34の外側端末部34aとが接続されている。コイル33とコイル34とは、互いに流れる励磁電流の向きが図2における矢印Y方向から見て逆方向、つまり反対の磁極を生じるように接続される。一方の渦巻きコイル33の外側端末部33a、及び他方の渦巻きコイル34の内側端末部34bは、リード線等を介して制御部(いずれも不図示)に電気的に接続されている。なお、渦巻きコイル33,34同士の接続線は、絶縁シート上の同一面であってコイルの交番磁束に悪影響しない余白部分に通すか、または、スルーホールを用いて裏面や、多層構成されている場合は他面を通すとよい。これについては、以下で説明する渦巻きコイル35,36でも同様である。
Further, the two
図3(b)に示すように、第2絶縁シート27の表面27bとは反対側の裏面27cには、ステータトランスコイル30が形成されておらず、cos励磁コイル32が形成されている。
cos励磁コイル32は、sin励磁コイル31と基本的構成が同一である。cos励磁コイル31は、軸方向からみてsin励磁コイル31と重なるように配置されている。但し、cos励磁コイル32は、sin励磁コイル31に対し、軸方向からみて機械角で90°ずれて配置されている。なお、本第1実施形態は軸倍角1のレゾルバ6であるが、軸倍角Nのレゾルバの場合、90°/Nずれた位置に配置する。
As shown in FIG. 3B, on the
The
cos励磁コイル32を構成する2つの渦巻きコイル35,36は、直列に接続されている。すなわち、2つの渦巻きコイル35,36の各端末部35a,35b,36a,36bを、それぞれ径方向外側に位置する外側端末部35a,36aと径方向内側に位置する内側端末部35b,36bとしたとき、一方の渦巻きコイル35の内側端末部35bと他方の渦巻きコイル36の外側端末部36aとが接続されている。一方の渦巻きコイル35と他方の渦巻きコイル36とは、互いに流れる励磁電流の向きが図2における矢印Y方向から見て逆方向、つまり反対の磁極を生じるように接続される。一方の渦巻きコイル35の外側端末部35a、及び他方の渦巻きコイル36の内側端末部36bは、リード線等を介して制御部(いずれも不図示)に電気的に接続されている。
The two
次に、図4に基づいて、レゾルバステータコア25の構成について詳述する。
図4は、レゾルバステータコア25を軸方向からみた平面図である。
図4に示すように、レゾルバステータコア25には、開口部25aの周縁から径方向に沿って、かつ径方向外側に向かって延びる複数(例えば、本第1実施形態では9つ)の内スリット38が形成されている。また、レゾルバステータコア25には、外周縁25cから径方向に沿って、かつ径方向内側に向かって延びる複数(例えば、本第1実施形態では9つ)の外スリット39が形成されている。内スリット38及び外スリット39は、周方向に等間隔で、交互に配置されている。
Next, the configuration of the
FIG. 4 is a plan view of the
As shown in FIG. 4, the
図5は、レゾルバステータコア25上に、図3(a)に示すステータトランスコイル30、及びsin励磁コイル31を投影した図である。なお、図5において、説明を分かりやすくするために、ステータトランスコイル30、及びsin励磁コイル31は、2点鎖線で示している。
図5に示すように、レゾルバステータコア25は、内周部側がステータトランスコイル30の軸方向の投影上となるように、かつ外周部側がsin励磁コイル31(cos励磁コイル32)の軸方向の投影上となるように略円環状に形成されている。ここで、レゾルバステータコア25に形成されている内スリット38及び外スリット39は、ステータトランスコイル30、sin励磁コイル31、及びcos励磁コイル32を径方向に跨るように延在されている。
FIG. 5 is a diagram in which the
As shown in FIG. 5, the
(レゾルバロータ)
図2に戻り、レゾルバロータ22は、略円板状に形成されたレゾルバロータ部41を有している。レゾルバロータ部41の径方向略中央には、厚さ方向に貫通する貫通孔41aが形成されている。この貫通孔41aに、回転軸13の他端13b側が圧入等により固定されている。これにより、回転軸13とレゾルバロータ22とが一体となって回転する。
(Resolver rotor)
Returning to FIG. 2, the
レゾルバロータ部41のレゾルバステータ21との対向面41bには、径方向中央の大部分に、凹部41cが形成されている。この凹部41cに、レゾルバロータコア42が配置されている。
レゾルバロータコア42は磁性材料により形成されており、基本的構成は前述のレゾルバステータコア25(図4参照)と同一である。このため以下では、レゾルバロータコア42の構成について、レゾルバステータコア25と同一符号で説明し、レゾルバロータコア42の詳細についての説明を省略する。
A
The
レゾルバロータコア42のレゾルバロータ部41とは反対側の一面42aには、第3絶縁シート43が配置されている。第3絶縁シート43は、レゾルバロータコア42の形状に対応するように、略円板状に形成されている。第3絶縁シート43の径方向中央にも、回転軸13を挿通可能な開口部43aが形成されている。
第3絶縁シート43のレゾルバステータ21側の表面43bには、第3絶縁シート43に成膜処理等を施すことにより、ロータトランスコイル44、及び検出コイル45が形成されている。第3絶縁シート43は、ロータトランスコイル44、及び検出コイル45と、レゾルバロータコア42との絶縁を確保するためのものである。
A third insulating
A
以下、図6に基づいて、ロータトランスコイル44、及び検出コイル45の構成について詳述する。
Hereinafter, the configurations of the
図6は、第3絶縁シート43の表面43b側を図2における矢印Y方向からみた平面図である。
図6に示すように、ロータトランスコイル44は、第3絶縁シート43の開口部43aの周囲を取り囲むように、渦巻き状に形成されている。また、検出コイル45は、ロータトランスコイル44の周囲を取り囲むように形成されている。検出コイル45は、2極で構成されている。すなわち、検出コイル45は、励磁コイル29の形状に対応するように、軸方向からみて略半円状の2つの渦巻きコイル46,47からなる。より具体的には、2つの渦巻きコイル46,47は、各励磁コイル31,32の最外側のループ形状とほぼ同じ大きさの略半円状に形成されている。また、2つの渦巻きコイル46,47は、回転軸13の回転軸線を通る径方向の任意の直線を中心として、線対称に形成されている。
FIG. 6 is a plan view of the
As shown in FIG. 6, the
このように形成されたロータトランスコイル44、及び検出コイル45(渦巻きコイル46,47)は、直列に接続されている。
すなわち、2つの渦巻きコイル46,47の各端末部46a,46b,47a,47bを、それぞれ径方向外側に位置する外側端末部46a,47aと径方向内側に位置する内側端末部46b,47bとしたとき、一方の渦巻きコイル46の内側端末部46bと他方の渦巻きコイル47の内側端末部47bとが接続されている。
The
That is, the
また、他方の渦巻きコイル47の外側端末部47aは、ロータトランスコイル44の両端末部44a,44bのうちの径方向外側の端末部44aに接続されている。
また、ロータトランスコイル44の両端末部44a,44bのうちの径方向内側の端末部44bは、一方の渦巻きコイル46の外側端末部46aに接続されている。すなわち、ロータトランスコイル44、及び検出コイル45は、1つの閉回路とされている。
The outer
Further, a radially inner
(レゾルバの作用)
次に、レゾルバ6の作用について説明する。
レゾルバ6の励磁コイル29(sin励磁コイル31、cos励磁コイル32)には、不図示の外部電源、制御部を介して予め励磁信号が入力されている。励磁コイル29に励磁信号を入力することにより、励磁コイル29に電流が生じ、それに伴ってレゾルバステータ21に交番磁束が発生する。具体的には、位相のずれた2つの励磁コイル31,32(sin励磁コイル31、cos励磁コイル32)により、レゾルバステータ21には、位相のずれた2つの交番磁束が発生する。これら交番磁束により、レゾルバロータ22の検出コイル45に誘起電圧が生じ、検出コイル45に交番電流が流れる。この交番電流は、2つの励磁コイル31,32により発生した2つの交番磁束を合成した形で生成される。
(Action of resolver)
Next, the operation of the
An excitation signal is previously input to the excitation coil 29 (
検出コイル45はロータトランスコイル44と直列接続されているので、ロータトランスコイル44にも電流が流れる。すると、レゾルバロータ22に交番磁束が発生する。この交番磁束により(電磁誘導により)、レゾルバステータ21のステータトランスコイル30に誘起電圧が生じる。ステータトランスコイル30は、不図示の制御部に接続されているので、ステータトランスコイル30で発生した誘起電圧は、信号として不図示の制御部に出力される。
Since the
ここで、レゾルバ6によるモータロータ5の回転位置を検出する原理について説明する。
モータロータ5が回転することにより、レゾルバステータ21に対してレゾルバロータ22が回転する。レゾルバロータ22が回転すると、レゾルバステータ21に対するレゾルバロータ22の位置が変化すると、励磁コイル29に入力する高周波の入力信号に対して検出コイル45から各トランスコイル30,44を介して出力される出力信号は回転位置に応じた位相差を持つ。この位相差を不図示の制御部によって検出し、モータロータ5の回転位置が検出される。
Here, the principle of detecting the rotational position of the
As the
図7は、レゾルバステータコア25、及びレゾルバロータコア42の一部拡大図であって、図5のB部に対応している。
ここで、図7に示すように、各コイル31,32,44,45に交番電流が流れると、交番磁束を発生するとともに、レゾルバステータコア25やレゾルバロータコア42に渦電流Uが発生しようとする。渦電流Uは、レゾルバステータコア25やレゾルバロータコア42の各コイル31,32,44,45が配置されている箇所及びその周囲全ての位置に面方向に沿って渦状に発生し、特にコイルの近傍に強く生じる。すなわち、レゾルバステータコア25やレゾルバロータコア42の各コイル31,32,44,45が配置されている箇所及びその周囲全ての箇所、特にコイルの近傍が、渦電流Uの発生領域Rである。換言すれば、発生領域Rは、レゾルバステータコア25やレゾルバロータコア42の各コイル31,32,44,45が配置されている箇所の一部に重なる領域である。渦電流Uは、各コイル31,32,44,45に流れる交番電流を妨げる向きに磁束を生じるため、効率よく交番磁束を形成するのを阻害してしまう。
FIG. 7 is a partially enlarged view of the
Here, as shown in FIG. 7, when an alternating current flows through each of the
しかしながら、レゾルバステータコア25、及びレゾルバロータコア42には、渦電流Uの発生領域Rに、内スリット38、及び外スリット39が形成されている。これらスリット38,39は、渦電流Uの流れを妨げる。しかも、内スリット38、及び外スリット39は、渦電流Uの流れを阻害するように、各コイル31,32,44,45を径方向に跨るように形成されている。このため、レゾルバステータコア25、及びレゾルバロータコア42で発生する渦電流Uの大きさを小さくしたりすることができる。この結果、各コイル31,32,44,45によって、効率よく交番磁束を形成することが可能になる。
However, in the
このように、上述の第1実施形態において、レゾルバステータコア25、及びレゾルバロータコア42には、渦電流Uの発生領域Rに、この渦電流Uの流れの抵抗となる内スリット38、及び外スリット39が形成されている。このため、レゾルバステータコア25、及びレゾルバロータコア42に発生する渦電流Uの大きさを小さくすることができる。この結果、各コイル31,32,44,45によって、効率よく交番磁束を形成することが可能になる。よって、その結果、外乱ノイズに対して十分な強度の信号が得られレゾルバ6によるモータロータ5の回転位置の検出精度を効果的に向上できる(いわゆる、S/N比が高い状況とすることができる)。
As described above, in the above-described first embodiment, the
また、レゾルバステータコア25、及びレゾルバロータコア42に、径方向に沿って内スリット38、及び外スリット39を形成している。このため、渦電流Uの大きさを小さくすることができ、レゾルバ6によるモータロータ5の回転位置の検出精度を確実に向上できる。
また、内スリット38、及び外スリット39を、レゾルバステータコア25、及びレゾルバロータコア42における渦電流Uの流れの抵抗としている。このように、簡素な構造で渦電流Uの流れを阻害できるので、レゾルバ6の製造コストを低減できる。
Further, an
Further, the
(第1実施形態の変形例)
なお、上述の第1実施形態では、レゾルバステータコア25、及びレゾルバロータコア42に形成された内スリット38及び外スリット39を、周方向に等間隔で配置した場合について説明した。しかしながら、これに限られるものではなく、内スリット38及び外スリット39を等間隔に配置しなくてもよい。
また、上述の第1実施形態では、各スリット38,42の個数がそれぞれ9つである場合について説明した。しかしながら、これに限られるものではなく、各スリット38,42の個数は、任意に設定することが可能である。
(Modification of First Embodiment)
In the first embodiment described above, the case where the
In the above-described first embodiment, the case where the number of each of the
また、上述の第1実施形態では、レゾルバステータコア25、及びレゾルバロータコア42に、渦電流Uの流れを阻害する手段として、径方向に沿う内スリット38及び外スリット39を形成した場合について説明した。しかしながら、これに限られるものではなく、レゾルバステータコア25、及びレゾルバロータコア42に、渦電流Uの流れを阻害するようにスリットが形成されていればよい。以下、図8〜図11に基づいて、具体的に変形例を挙げて説明する。
Further, in the first embodiment described above, the case where the
例えば、図8に示すように、レゾルバステータコア25、及びレゾルバロータコア42に、径方向全体に渡って形成されるスリット51を複数設けてもよい。各スリット51は、周方向に等間隔で形成されている。しかしながら、各スリット51を、周方向に等間隔で形成しなくてもよい。
For example, as shown in FIG. 8, the
ところで、本変形例のように、レゾルバステータコア25、及びレゾルバロータコア42に、径方向全体に渡ってスリット51を形成すると、レゾルバステータコア25、及びレゾルバロータコア42が周方向に分割される。このような場合、特に図示は省略するが、分割された各レゾルバステータコア25、及びレゾルバロータコア42を連結する箇所を設けることが望ましい(以下の実施形態や変形例についても同様)。このように構成することで、レゾルバステータコア25やレゾルバロータコア42を一体化できるので、これらレゾルバステータコア25やレゾルバロータコア42の生産性を向上できる。
By the way, when the
また、図9に示すように、レゾルバステータコア25、及びレゾルバロータコア42に、軸方向からみて複数(例えば、図9では5つ)の略円環状のスリット52を形成し、これらスリット52を同心円上に配置してもよい。
As shown in FIG. 9, a plurality of (for example, five in FIG. 9) substantially
また、図10に示すように、レゾルバステータコア25、及びレゾルバロータコア42に、軸方向からみて複数(例えば、図10では2つ)の略円環状のスリット53を形成するとともに、径方向に沿う複数(例えば、図10では4つ)の縦スリット54を形成してもよい。縦スリット54は、回転軸13の回転軸線を通る径方向の任意の直線を中心に形成されている。
このように、スリット53と縦スリット54とを組み合わせることにより、渦電流Uの流れる経路を効果的に寸断することができ、渦電流Uを小さくすることができる。
As shown in FIG. 10, a plurality of (for example, two in FIG. 10) substantially
In this way, by combining the
なお、レゾルバステータコア25やレゾルバロータコア42の磁気的な抵抗を増やさないためには、スリットを設けることで減少するコアの面積を最小限にすべきであり、スリットの幅は狭い方が望ましい。例えば、レゾルバステータコア25やレゾルバロータコア42を、薄板鋼板材で制作する場合であれば、板厚の1.5倍以下とすることが望ましい。一方で量産の加工技術を考慮すると、スリット幅を、板厚の半分以上とすべきである。生産方法としては、例えば、レーザ加工やエッチング、プレス加工などがある。
In order to prevent the magnetic resistance of the
図11は、図10に示すレゾルバステータコア25上に、ステータトランスコイル30、及びsin励磁コイル31を投影した図である。なお、図11において、説明を分かりやすくするために、ステータトランスコイル30、及びsin励磁コイル31を2点鎖線で示している。
図11に示すように、スリット53と縦スリット54とを組み合わせることにより、レゾルバステータコア25上の渦電流U(図7参照)の発生領域Rで渦電流Uの流れを阻害することができる。より効果的に渦電流Uの流れを阻害するために、略円環状のスリット53は、各コイル30,31の一部と重なるように配置されている。レゾルバロータコア42についても、同様の効果を奏する。
FIG. 11 is a diagram in which the
As shown in FIG. 11, by combining the
また、図12に示すように、レゾルバステータコア25、及びレゾルバロータコア42に形成された複数の内スリット38、及び外スリット39を、磁極中心Cに向かうに従って密になるように配置してもよい。すなわち、内スリット38と外スリット39との間の間隔は、磁極中心Cに向かうに従って狭くなり、磁極中心Cから離間するに従って広くなるようにしてもよい。磁極中心Cは、渦巻きコイル33〜36,46,47の巻回数が多くなるので、渦電流Uの発生が多くなりやすい。このため、磁極中心Cに向かうに従って各スリット38,39を密にすることにより、各コア25,42の機械的強度を十分確保しつつ、渦電流Uの流れる経路を、より効率的に寸断することができる。
As shown in FIG. 12, a plurality of
ここで、磁極中心Cについて詳述する。
図6に示すように、検出コイル45は、2極で構成されている。すなわち、検出コイル45は、軸方向からみて略半円状の2つの渦巻きコイル46,47からなる。これら2つの渦巻きコイル46,47の周方向中央が、レゾルバロータコア42(検出コイル45)の磁極中心Cとなる。
Here, the magnetic pole center C will be described in detail.
As shown in FIG. 6, the
これに対し、図3(a)、図3(b)に示すように、励磁コイル29の場合、機械角で90°ずれたsin励磁コイル31と、cos励磁コイル32と、からなる。つまり、sin励磁コイル31の磁極中心Csinと、cos励磁コイル32の磁極中心Ccosと、の2つの磁極中心Csin,Ccosを有し、しかもこれら2つの磁極中心Csin,Ccosが機械角で90°ずれている。このような場合、sin励磁コイル31、及びcos励磁コイル32のそれぞれ磁極中心Csin,Ccosの間に、レゾルバステータコア25(励磁コイル29)の磁極中心Cが生じる。つまり、sin励磁コイル31とcos励磁コイル32とを合算した磁極中心Cを、レゾルバステータコア25(励磁コイル29)の磁極中心Cとなる。本実施形態では、sin励磁コイル31の磁極中心Csin、及びcos励磁コイル32の磁極中心Ccosに対し、機械角で45°ずれた位置が、レゾルバステータコア25(励磁コイル29)の磁極中心Cとなる(図3(a)、図3(b)に各磁極中心を結ぶ磁極中心線を示す)。この磁極中心Cの考え方については、以下の変形例についても同様である。
On the other hand, as shown in FIGS. 3A and 3B, the
図13に示すように、レゾルバステータコア25、及びレゾルバロータコア42の径方向全体に渡って形成された複数のスリット51を、磁極中心Cに向かうに従って密になるように配置してもよい。すなわち、スリット51の周方向の間隔は、磁極中心Cに向かうに従って狭くなり、磁極中心Cから離間するに従って広くなるようにしてもよい。このように構成することで、上述の変形例と同様の効果を奏することができる。
As shown in FIG. 13, a plurality of
(第2実施形態)
次に、図14に基づいて、本発明の第2実施形態について説明する。なお、第1実施形態と同一態様には、同一符号を付して説明を省略する。
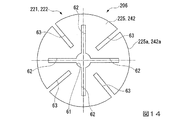
図14は、第2実施形態におけるレゾルバステータコア225、及びレゾルバロータコア242を軸方向からみた平面図である。
第2実施形態において、ブラシレスモータ1の基本的構成は、前述の第1実施形態と同様である。また、レゾルバ206の基本的構成も前述の第1実施形態と同様である。
(2nd Embodiment)
Next, a second embodiment of the present invention will be described with reference to FIG. Note that the same reference numerals are given to the same aspects as the first embodiment, and description thereof will be omitted.
FIG. 14 is a plan view of the resolver stator core 225 and the resolver rotor core 242 in the second embodiment as viewed from the axial direction.
In the second embodiment, the basic configuration of the brushless motor 1 is the same as that of the first embodiment. The basic configuration of the
ここで、前述の第1実施形態と本第2実施形態との相違点は、前述の第1実施形態におけるレゾルバステータコア25、及びレゾルバロータコア42の形状と、本第2実施形態におけるレゾルバステータコア225、及びレゾルバロータコア242の形状とが異なる点である。これに伴い、レゾルバステータ221、及びレゾルバロータ222の固定方向が、前述の第1実施形態と異なる。以下、詳述する。
Here, the difference between the first embodiment and the second embodiment is that the shapes of the
図14に示すように、本第2実施形態におけるレゾルバステータコア225、及びレゾルバロータコア242は、略円板状に形成されている。但し、レゾルバステータコア225、及びレゾルバロータコア242の径方向略中央には、回転軸13(例えば、図1参照)を挿通可能な開口部25a(例えば、図2参照)が形成されていない。
このため、特に図示は省略するが、レゾルバロータ222は、回転軸13の他端13bに固定される。また、レゾルバステータ221は、前述の第1実施形態におけるレゾルバステータ21の位置とは反対側に配置される。すなわち、レゾルバステータ221は、レゾルバロータ222のモータステータ4とは反対側に配置される。そして、レゾルバステータ221は、ブラシレスモータ1に別途設けられるカバー等(不図示)に取り付けられる。
As shown in FIG. 14, the resolver stator core 225 and the resolver rotor core 242 in the second embodiment are formed in a substantially disc shape. However, an
Therefore, although not particularly shown, the resolver rotor 222 is fixed to the
レゾルバステータコア225、及びレゾルバロータコア242の径方向略中央には、厚さ方向に貫通する貫通孔61が形成されている。この貫通孔61は、軸方向からみてステータトランスコイル30、及びロータトランスコイル44(図3(a)、図6参照、本第2実施形態では不図示)よりも径方向内側に位置する。
At a substantially radial center of the resolver stator core 225 and the resolver rotor core 242, a through-
また、レゾルバステータコア225、及びレゾルバロータコア242には、貫通孔61の内周縁から径方向に沿って、かつ径方向外側に向かって延びる複数(例えば、本第2実施形態では4つ)の内スリット62が形成されている。さらに、レゾルバステータコア225、及びレゾルバロータコア242には、外周縁225a,242aから径方向に沿って、かつ径方向内側に向かって延びる複数(例えば、本第2実施形態では4つ)の外スリット63が形成されている。内スリット62及び外スリット63は、周方向に等間隔で、交互に配置されている。
In the resolver stator core 225 and the resolver rotor core 242, a plurality of (for example, four in the second embodiment) inner slits extending radially outward from the inner peripheral edge of the through
このように構成した場合であっても、前述の第1実施形態と同様の効果を奏する。 Even in the case of such a configuration, the same effects as those of the first embodiment can be obtained.
(第2実施形態の変形例)
なお、上述の第2実施形態では、レゾルバステータコア225、及びレゾルバロータコア242に形成された内スリット62及び外スリット63を、周方向に等間隔で配置した場合について説明した。しかしながら、これに限られるものではなく、内スリット62及び外スリット63を等間隔に配置しなくてもよい。
また、上述の第1実施形態では、各スリット62,63の個数がそれぞれ4つである場合について説明した。しかしながら、これに限られるものではなく、各スリット62,63の個数は、任意に設定することが可能である。
(Modification of the second embodiment)
In the above-described second embodiment, the case where the
In the above-described first embodiment, the case where the number of each of the
また、上述の第2実施形態では、レゾルバステータコア225、及びレゾルバロータコア242に、渦電流Uの流れを阻害する手段として、貫通孔61、内スリット62及び外スリット63を形成した場合について説明した。しかしながら、これに限られるものではなく、レゾルバステータコア225、及びレゾルバロータコア242に、渦電流Uの流れを阻害するようにスリットが形成されていればよい。以下、図15〜図17に基づいて、具体的に変形例を挙げて説明する。
In the above-described second embodiment, a case has been described in which the through
例えば、図15に示すように、レゾルバステータコア225、及びレゾルバロータコア242に、貫通孔61と外周縁225a,242aとの間を跨るように、径方向全体に渡って形成されるスリット64を複数設けてもよい。各スリット64は、周方向に等間隔で形成されている。しかしながら、各スリット64を、周方向に等間隔で形成しなくてもよい。
For example, as shown in FIG. 15, a plurality of
また、上述の第2実施形態及び変形例の各スリット62,63,64を、磁極中心Cに向かうに従って密になるように配置してもよい。すなわち、各スリット62,63,64の周方向の間隔は、磁極中心Cに向かうに従って狭くなり、磁極中心Cから離間するに従って広くなるようにしてもよい。
Further, the
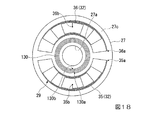
また、図16に示すように、レゾルバステータコア225、及びレゾルバロータコア242に、軸方向からみて複数(例えば、図16では6つ)の略円環状のスリット65を形成し、これらスリット65を同心円上に配置してもよい。
As shown in FIG. 16, a plurality of (for example, six in FIG. 16) substantially
また、図17に示すように、レゾルバステータコア225、及びレゾルバロータコア242に、軸方向からみて複数(例えば、図17では3つ)の略円環状のスリット66を形成するとともに、径方向に沿う複数(例えば、図17では6つ)の縦スリット67を形成してもよい。縦スリット67は、回転軸13の回転軸線を通る径方向の任意の直線を中心に形成されている。
このように、スリット66と縦スリット67とを組み合わせることにより、渦電流Uの流れる経路を効果的に寸断することができ、渦電流Uを小さくすることができる。この結果、スリット66のスリット幅を大きくすることが可能になる。
なお、各コア225,242の磁気的な抵抗を増やさないためには、各スリット66,67を設けることで減少する各コア225,242の面積を最小限にすべきであり、スリットの幅は狭い方が望ましい。例えば、各コア225,242が薄板鋼板材であれば、板厚の0.5倍からから板厚の1.5倍とするのが望ましい。
As shown in FIG. 17, a plurality of (for example, three in FIG. 17) substantially
In this way, by combining the
In order to prevent the magnetic resistance of each core 225, 242 from increasing, the area of each core 225, 242, which is reduced by providing each slit 66, 67, should be minimized. A narrow one is desirable. For example, if each of the cores 225 and 242 is a thin steel plate, the thickness is desirably 0.5 to 1.5 times the plate thickness.
なお、本発明は上述の実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲において、上述の実施形態に種々の変更を加えたものを含む。
例えば、上述の実施形態では、レゾルバ6,206は、ブラシレスモータ1に設けられ、モータロータ5の回転位置を検出するために用いられる場合について説明した。しかしながら、これに限られるものではなく、さまざまな回転電機に、レゾルバ6,206を用いることが可能である。
Note that the present invention is not limited to the above-described embodiment, and includes various modifications of the above-described embodiment without departing from the spirit of the present invention.
For example, in the above-described embodiment, the case has been described where the
また、上述の実施形態では、レゾルバステータコア25,225、及びレゾルバロータコア42,242に、渦電流Uの流れを阻害する手段として、各種スリット38,39,51〜54,62〜67や貫通孔61を形成した場合について説明した。これら各種スリット38,39,51〜54,62〜67や貫通孔61を適宜組み合わせてもよい。また、これら各種スリット38,39,51〜54,62〜67や貫通孔61に限られるものではなく、レゾルバステータコア25,225、及びレゾルバロータコア42,242よりも電気抵抗が高く、渦電流Uの流れを阻害するものが形成されていればよい。各種スリット38,39,51〜54,62〜67や貫通孔61の個数も、上述の実施形態の個数に限られるものではない。
In the above-described embodiment, the
つまり、例えば、各種スリット38,39,51〜54,62〜67や貫通孔61に代わって、凹部(例えば、図4に符号70で示す)としてもよい。凹部70とすることにより、この凹部が形成されている箇所の肉厚が減少するので、凹部70が形成されている箇所と比較して電気抵抗が高くなる。このため、凹部70によって、渦電流Uの流れを阻害できる。(例えば、図4のスリット39が連続した薄肉部となり、周囲に対して凹部となる。)
That is, for example, instead of the
また、各種スリット38,39,51〜54,62〜67や貫通孔61に、樹脂等を充填してもよい。樹脂等を充填する分、レゾルバステータコア25,225、及びレゾルバロータコア42,242の機械的強度を高めることができる。
また、レゾルバステータコア25,225、及びレゾルバロータコア42,242の渦電流Uの発生領域Rであれば、抵抗となる形状は、如何なる形状でもよい。軸方向からみてU字状やV字状等、さまざまな形状を採用できる。
Further, the
In addition, as long as the eddy current U is generated in the region R where the
また、上述の実施形態では、レゾルバステータコア25,225、及びレゾルバロータコア42,242の励磁コイル29、検出コイル45、各トランスコイル30,44が形成されている箇所のそれぞれに、各種スリット38,39,51〜54,62〜67や貫通孔61を形成した場合について説明した。しかしながら、これに限られるものではなく、少なくともレゾルバステータコア25,225の励磁コイル29が形成されている箇所に、渦電流Uの流れを阻害する抵抗(各種スリット38,39,51〜54,62〜67や貫通孔61)があればよい。
少なくともレゾルバステータコア25,225の励磁コイル29が形成されている箇所に、渦電流Uの流れを阻害する抵抗があれば、レゾルバステータコア25,225、及びレゾルバロータコア42,242のいずれかに各種スリット38,39,51〜54,62〜67や貫通孔61が形成されていても、形成されていなくてもよい。
Further, in the above-described embodiment,
If there is a resistance that inhibits the flow of the eddy current U at least at a position where the
ここで、励磁コイル29への通電により発生する渦電流Uは、その他のコイル30,44,45への通電の場合と比較して大きくなりやすい。このため、励磁コイル29が配置されている箇所に抵抗を設けることにより、渦電流Uによる影響を最も低減しやすい。よって、レゾルバ6,206によるモータロータ5の回転位置の検出精度を、効果的に向上できる。
Here, the eddy current U generated by energizing the
また、上述の実施形態では、励磁コイル29、検出コイル45、各トランスコイル30,44を、成膜処理等を施すことにより形成した場合について説明した。しかしながら、これに限られるものではなく、さまざまな方法で励磁コイル29、検出コイル45、各トランスコイル30,44を形成することが可能である。例えば、第2絶縁シート27や第3絶縁シート43に銅線を渦巻き状に敷設し、励磁コイル29、検出コイル45、各トランスコイル30,44を形成してもよい。
In the above-described embodiment, the case has been described in which the
また、上述の実施形態では、第2絶縁シート27の裏面27cには、ステータトランスコイル30が形成されておらず、cos励磁コイル31が形成されている場合について説明した。しかしながら、これに限られるものではなく、図18に示すように、第2絶縁シート27の裏面27cにもステータトランスコイル130を形成してもよい。
In the above-described embodiment, the case where the
この場合、第2絶縁シート27の表面27bに形成されたステータトランスコイル30の両端末部30a,30bのうち、径方向内側の端末部30b(図3(a)参照)と、第2絶縁シート27の裏面27cに形成されたステータトランスコイル130の両端末部130a,130bのうち、径方向内側の端末部130bと接続する。そして、ステータトランスコイル30の径方向外側の端末部30a(図3(a)参照)と、ステータトランスコイル130の径方向外側の端末部130aとを、リード線等を介して制御部(いずれも不図示)に電気的に接続する。
このように構成することで、ステータトランスコイル30,130とロータトランスコイル44との間の電磁誘導を、より促進させることができる。この結果、レゾルバ6によるモータロータ5の回転位置の検出精度を、さらに向上できる。
In this case, of the two
With this configuration, electromagnetic induction between the stator transformer coils 30, 130 and the
また、上述の実施形態では、第3絶縁シート43の表面43bに、ロータトランスコイル44、及び検出コイル45が形成されている場合について説明した。しかしながら、これに限られるものではなく、図19(a)、図19(b)に示すように、第3絶縁シート43の表面43bとは反対側の裏面43cにもロータトランスコイル144、及び検出コイル145を形成してもよい。
In the above-described embodiment, the case where the
この場合、第3絶縁シート43の表面43bでは、一方の渦巻きコイル46の内側端末部46bと他方の渦巻きコイル47の内側端末部47bとが接続されている。また、他方の渦巻きコイル47の外側端末部47aは、ロータトランスコイル44の両端末部44a,44bのうちの径方向外側の端末部44aに、渡り線部48を介して接続されている。ロータトランスコイル44の径方向内側の端末部44bは、第3絶縁シート43の裏面43cに形成されたロータトランスコイル144の両端末部144a,144bのうちの径方向外側の端末部144aに接続されている。
In this case, on the
また、第3絶縁シート43の裏面43cにおいて、ロータトランスコイル144の両端末部144a,144bのうちの径方向内側の端末部144bは、表面43bのロータトランスコイル44における径方向内側の端末部44bに接続されている。一方の渦巻きコイル146、及び他方の渦巻きコイル147は、一連に形成されている。これら一方の渦巻きコイル146、及び他方の渦巻きコイル147は、対応する表面43bの一方の渦巻きコイル46、及び他方の渦巻きコイル47に接続されている。これにより、ロータトランスコイル44,144、及び検出コイル45,145は、1つの閉回路とされている。
Also, on the
このように構成することで、ステータトランスコイル30,130とロータトランスコイル44,144との間の電磁誘導を、より促進させることができる。この結果、レゾルバ6によるモータロータ5の回転位置の検出精度を、さらに向上できる。
With this configuration, electromagnetic induction between the stator transformer coils 30, 130 and the rotor transformer coils 44, 144 can be further promoted. As a result, the detection accuracy of the rotational position of the
この他、励磁コイル29、検出コイル45、各トランスコイル30,44の形状は、種々変更可能である。例えば、上述の実施形態では、励磁コイル29、及び検出コイル45は、2極で構成されている場合について説明した。すなわち、励磁コイル29、及び検出コイル45は、軸方向からみて略半円状に形成された渦巻きコイル33〜36,46,47により構成した場合について説明した。また、各渦巻きコイル33〜36,46,47は、回転軸13の回転軸線を通る任意の直線を中心に、線対称に配置されている場合について説明した。しかしながら、これに限られるものではなく、励磁コイル29、及び検出コイル45の極数を任意に設定することが可能である。2つ以上の複数の渦巻きコイルにより、励磁コイル29や検出コイル45を構成してもよい。
また、各コイル29,45の形成方法は、絶縁シート27,43上に形成した銅箔シートからエッチングで形成する他、絶縁シート27,43状に銅や銀を直接印刷してパターン形成する方法や、電線でコイル状に形成する方法であってもよい。
In addition, the shapes of the
The
また、sin励磁コイル31とcos励磁コイル32とは、機械角で90°ずれている場合について説明した。しかしながら、これに限られるものではなく、モータロータ5の磁極数に応じ、sin励磁コイル31とcos励磁コイル32との機械角のずれを適宜変更可能である。つまり、レゾルバ6の軸倍角は1に限られず、2以上についても適用可能である。
In addition, the case where the
また、上述の実施形態では、レゾルバステータ21,221の励磁コイル29を入力に用いた。しかしながら、これに限られるものではなく、ステータトランスコイル30,130を入力に用いてもよい。このとき、入力信号は1相(例えばsin相の電圧信号)となり、出力信号が2相(例えばsin相とcos相の電圧信号)となる。このため、励磁コイルは検出コイルに、検出コイルは励磁コイルになる。そして、出力の2相の信号からレゾルバステータ21,221に対するレゾルバロータ22,222の回転角度を検出することができる。
In the above-described embodiment, the excitation coils 29 of the
6,206…レゾルバ、21,221…レゾルバステータ、22,222…レゾルバロータ、25,225…レゾルバステータコア(ステータコア)、25b…一面(第1面)、27…第2絶縁シート、29…励磁コイル、30,130…ステータトランスコイル(第1トランスコイル)、31…sin励磁コイル(励磁コイル)、32…cos励磁コイル(励磁コイル)、38,62…内スリット(抵抗部)、39,63…外スリット(抵抗部)、42,242…レゾルバロータコア(ロータコア)、42a…一面(第2面)、43…第3絶縁シート、44…ロータトランスコイル(第2トランスコイル)、45…検出コイル、51,52,53,64,65,66…スリット(抵抗部)、54,67…縦スリット(スリット)、61…貫通孔(抵抗部)、70…凹部(抵抗部)、R…発生領域、U…渦電流 6, 206 resolver, 21, 221 resolver stator, 22, 222 resolver rotor, 25, 225 resolver stator core (stator core), 25b one surface (first surface), 27 second insulating sheet, 29 excitation coil , 30, 130 ... stator transformer coil (first transformer coil), 31 ... sin excitation coil (excitation coil), 32 ... cos excitation coil (excitation coil), 38, 62 ... inner slit (resistance part), 39, 63 ... Outer slits (resistance portions), 42, 242: resolver rotor core (rotor core), 42a: one surface (second surface), 43: third insulating sheet, 44: rotor transformer coil (second transformer coil), 45: detection coil, 51, 52, 53, 64, 65, 66... Slit (resistor), 54, 67 .. vertical slit (slit), 61. Hole (resistance portion), 70 ... recess (resistance portion), R ... generation region, U ... eddy current
Claims (5)
前記ステータコアに対して回転可能に設けられ、回転軸線方向で前記ステータコアと対向するロータコアと、
前記ステータコアに設けられた第1トランスコイルと、
前記ロータコアに設けられ、前記第1トランスコイルと対向する第2トランスコイルと、
前記ステータコアに設けられ前記第1トランスコイルと同心円上に設けられた励磁コイルと、
前記ロータコアに設けられ、かつ前記励磁コイルと対向する検出コイルと、
を備え、
前記ステータコア、及び前記ロータコアの少なくともいずれか一方で、かつ少なくとも前記第1トランスコイル、前記第2トランスコイル、前記励磁コイル、及び前記検出コイルが配置されている箇所の一部に重なる領域に、前記ステータコア、及び前記ロータコアよりも電気抵抗が高く、渦電流の流れを阻害する抵抗部が少なくとも1つ設けられている
ことを特徴とするレゾルバ。 A stator core,
A rotor core provided rotatably with respect to the stator core, and opposed to the stator core in a rotation axis direction;
A first transformer coil provided on the stator core;
A second transformer coil provided on the rotor core and facing the first transformer coil;
An exciting coil provided on the stator core and provided on a concentric circle with the first transformer coil;
A detection coil provided on the rotor core and facing the excitation coil;
With
At least one of the stator core and the rotor core, and at least a region overlapping a part of a place where the first transformer coil, the second transformer coil, the excitation coil, and the detection coil are arranged, A resolver comprising: a stator core; and at least one resistance portion that has a higher electrical resistance than the rotor core and that inhibits eddy current flow.
ことを特徴とする請求項1に記載のレゾルバ。 The resolver according to claim 1, wherein the resistance portion is formed along a radial direction orthogonal to a rotation axis direction of the rotor core.
ことを特徴とする請求項1に記載のレゾルバ。 2. The resolver according to claim 1, wherein the resistance portion is formed so as to be curved along the rotation direction of the rotor core when viewed from a rotation axis direction. 3.
前記抵抗部は、前記ステータコア、及び前記ロータコアの少なくともいずれかに形成されたスリットである
ことを特徴とする請求項1〜請求項3のいずれか1項に記載のレゾルバ。 The stator core and the rotor core are formed in a plate shape,
4. The resolver according to claim 1, wherein the resistance portion is a slit formed in at least one of the stator core and the rotor core. 5.
ことを特徴とする請求項1〜請求項3のいずれか1項に記載のレゾルバ。 4. The resolver according to claim 1, wherein the resistance portion is a concave portion formed in at least one of the stator core and the rotor core. 5.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018120170A JP7118766B2 (en) | 2018-06-25 | 2018-06-25 | Resolver |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018120170A JP7118766B2 (en) | 2018-06-25 | 2018-06-25 | Resolver |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020003230A true JP2020003230A (en) | 2020-01-09 |
| JP7118766B2 JP7118766B2 (en) | 2022-08-16 |
Family
ID=69099567
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018120170A Active JP7118766B2 (en) | 2018-06-25 | 2018-06-25 | Resolver |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7118766B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022124416A1 (en) * | 2020-12-11 | 2022-06-16 | マブチモーター株式会社 | Resolver |
| JP7411505B2 (en) | 2020-06-03 | 2024-01-11 | ホシデン株式会社 | Shield members, shield units, and connector modules |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006006081A (en) * | 2004-06-21 | 2006-01-05 | Asmo Co Ltd | Brushless motor and vehicular blower |
| JP2006138806A (en) * | 2004-11-15 | 2006-06-01 | Tamagawa Seiki Co Ltd | Brushless rotation detector |
| JP2011226907A (en) * | 2010-04-20 | 2011-11-10 | Aisan Ind Co Ltd | Rotation angle sensor |
-
2018
- 2018-06-25 JP JP2018120170A patent/JP7118766B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006006081A (en) * | 2004-06-21 | 2006-01-05 | Asmo Co Ltd | Brushless motor and vehicular blower |
| JP2006138806A (en) * | 2004-11-15 | 2006-06-01 | Tamagawa Seiki Co Ltd | Brushless rotation detector |
| JP2011226907A (en) * | 2010-04-20 | 2011-11-10 | Aisan Ind Co Ltd | Rotation angle sensor |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7411505B2 (en) | 2020-06-03 | 2024-01-11 | ホシデン株式会社 | Shield members, shield units, and connector modules |
| WO2022124416A1 (en) * | 2020-12-11 | 2022-06-16 | マブチモーター株式会社 | Resolver |
| JP2022092918A (en) * | 2020-12-11 | 2022-06-23 | マブチモーター株式会社 | Resolver |
| CN116648599A (en) * | 2020-12-11 | 2023-08-25 | 马渊马达株式会社 | Rotary transformer |
| CN116648599B (en) * | 2020-12-11 | 2024-04-09 | 马渊马达株式会社 | Rotary transformer |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7118766B2 (en) | 2022-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4862118B2 (en) | Angle detector | |
| JP2011043378A (en) | Sheet coil type resolver | |
| JP5110233B2 (en) | Winding method of rotation detector stator, winding structure thereof and electric motor using rotation detector | |
| JP2007267565A (en) | Coreless motor | |
| JPWO2011158415A1 (en) | Winding method and structure of stator for rotation detector and electric motor having rotation detector | |
| JP2019530400A (en) | Rotor position sensing device and motor including the same | |
| JP2016111842A (en) | Double-stator rotary electric machine | |
| JP2012186938A (en) | Armature | |
| JP5275930B2 (en) | Sheet coil type resolver | |
| JP7118766B2 (en) | Resolver | |
| JP5182752B2 (en) | Angle detection device and manufacturing method thereof | |
| JP2018189485A (en) | Angle detector | |
| JP5295023B2 (en) | Electric motor | |
| JP7461967B2 (en) | Rotating electric machines, rotors and electromagnetic steel sheets | |
| JP2015119523A (en) | Resolver | |
| JP2009247112A (en) | Magnetic flux interference reducing type redundant resolver structure | |
| JP5698715B2 (en) | Axial gap type brushless motor | |
| JP2005237191A (en) | Motor | |
| JP2020003232A (en) | Resolver | |
| JP5342963B2 (en) | Sheet coil type resolver | |
| JP7172979B2 (en) | Rotating electric machine | |
| US10686340B2 (en) | Interior permanent magnet motor | |
| JP2011202966A (en) | Rotation angle sensor | |
| US20240035857A1 (en) | Resolver | |
| JP2019140789A (en) | Rotary electric machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220408 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220419 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220615 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220705 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220803 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7118766 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |