JP2019537003A - ポイントオブケア診断アッセイカートリッジ - Google Patents
ポイントオブケア診断アッセイカートリッジ Download PDFInfo
- Publication number
- JP2019537003A JP2019537003A JP2019522290A JP2019522290A JP2019537003A JP 2019537003 A JP2019537003 A JP 2019537003A JP 2019522290 A JP2019522290 A JP 2019522290A JP 2019522290 A JP2019522290 A JP 2019522290A JP 2019537003 A JP2019537003 A JP 2019537003A
- Authority
- JP
- Japan
- Prior art keywords
- cartridge
- zone
- microfluidic system
- fluid
- reagent
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L3/00—Containers or dishes for laboratory use, e.g. laboratory glassware; Droppers
- B01L3/50—Containers for the purpose of retaining a material to be analysed, e.g. test tubes
- B01L3/502—Containers for the purpose of retaining a material to be analysed, e.g. test tubes with fluid transport, e.g. in multi-compartment structures
- B01L3/5027—Containers for the purpose of retaining a material to be analysed, e.g. test tubes with fluid transport, e.g. in multi-compartment structures by integrated microfluidic structures, i.e. dimensions of channels and chambers are such that surface tension forces are important, e.g. lab-on-a-chip
- B01L3/50273—Containers for the purpose of retaining a material to be analysed, e.g. test tubes with fluid transport, e.g. in multi-compartment structures by integrated microfluidic structures, i.e. dimensions of channels and chambers are such that surface tension forces are important, e.g. lab-on-a-chip characterised by the means or forces applied to move the fluids
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2200/00—Solutions for specific problems relating to chemical or physical laboratory apparatus
- B01L2200/06—Fluid handling related problems
- B01L2200/0621—Control of the sequence of chambers filled or emptied
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2200/00—Solutions for specific problems relating to chemical or physical laboratory apparatus
- B01L2200/16—Reagents, handling or storing thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/08—Geometry, shape and general structure
- B01L2300/0803—Disc shape
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2400/00—Moving or stopping fluids
- B01L2400/04—Moving fluids with specific forces or mechanical means
- B01L2400/0403—Moving fluids with specific forces or mechanical means specific forces
- B01L2400/0409—Moving fluids with specific forces or mechanical means specific forces centrifugal forces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2400/00—Moving or stopping fluids
- B01L2400/04—Moving fluids with specific forces or mechanical means
- B01L2400/0403—Moving fluids with specific forces or mechanical means specific forces
- B01L2400/0457—Moving fluids with specific forces or mechanical means specific forces passive flow or gravitation
Landscapes
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Dispersion Chemistry (AREA)
- Analytical Chemistry (AREA)
- General Health & Medical Sciences (AREA)
- Hematology (AREA)
- Clinical Laboratory Science (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
Abstract
本発明は、モータに連結され、流体試料をカートリッジ上の複数の位置に移動させるようになっているカートリッジを有するマイクロ流体システムを提供する。カートリッジは、少なくとも3つの区域を有する山形または実質的にV字形の反応チャンバと、V字形反応チャンバの頂点付近に配置されて検出区域を画定する第1区域と、V字形反応チャンバの第1端の近く配置される第2区域と、V字型反応チャンバの第2端の近く配置される第3の区域と、を含む。モータおよび制御モジュールは、遠心力と重力との組み合わせを提供して、流体試料を少なくとも3つの区域間で移動させるように構成される。
Description
本発明はポイントオブケアカートリッジに関する。特に、本発明は、遠心マイクロ流体技術に基づくポイントオブケア診断アッセイシステムに関する。
様々な種類の試料の生化学的含有量を決定するための手作業による処理は、多くの用途において法外な費用がかかり、またエラーを起こしやすい。自動化も、多くの用途において法外な費用がかかり、現在行われているように、例えば液体処理ロボットを用いることは、ポイントオブケアまたは診療所分析などの用途には不適切である。結果として、現在の自動化または手動処理よりも安価であり、かつ誤りが少ない生化学的アッセイのための試料処理の提供には、満たされていないニーズがある。
典型的には、流体の主要移動手段として遠心マイクロ流体を用いて流体を半径方向内側に移動させることは非常に困難である。これは、シーケンシャルなアッセイを実施することを可能にするために利用可能な選択肢を限定/制限する可能性がある。
遠心マイクロ流体技術に基づく特定のポイントオブケア診断アッセイシステムは、必要な統合試料調製およびアッセイ測定ステップを実行するのに非常に優れている。光学的検出を有するこのような遠心マイクロ流体プラットフォームは、単一の機器および使い捨てカートリッジを使用して様々なアッセイ技術を並行して実施することを可能にする。ポイントオブケア診断アッセイシステムの例には、US9182384B2(Roche),US8415140B2(Panasonic),US8846380(Infopia),US5591643(Abaxis),US5409665(Abaxis)を含む。
米国特許公報第2010/074801号は、モータに結合されたマイクロチップを含む分析器を記載しており、マイクロチップは毛管作用によって液体試料を取得する。マイクロチップは、毛細管圧を低下させる構造を提供することによって、毛細管現象を使用して液体試料を移動させるという制限を克服する。これは、各チャネルに、大気圧に開放された隣接キャビティを設けることによって達成され、隣接キャビティは、流体の長さが増加する時に毛細管圧力の増加を防ぐように作用する。したがって、発明の一実施形態では、マイクロチップ構造は、液体試料を収集するための入口と、所定量の液体試料を保持するための毛細管キャビティと、分析試薬を有する単一の保持チャンバと、液体試料と試薬との混合物を測定するための測定チャンバと、保持チャンバと測定チャンバと連通する通路と、測定チャンバと大気ベントとを接続する通路と、を含む。使用時には、毛細管キャビティ内の液体試料は遠心力によって保持チャンバ内に移送され、そこで分析試薬と混合される。次に、この混合物は毛管力によって保持チャンバから測定チャンバの入口に移送され、そこから分析装置の回転によって測定チャンバ自体に移送される。測定チャンバでは、液体試料の成分の濃度が測定される。したがって、この特許文書において、マイクロチップ構造は、一旦保持チャンバが単一の試薬と液体試料との混合物を測定チャンバに送達すると、混合物が保持チャンバに戻ることができないように構成される。
米国特許公報第2015/104814号は、全血分離用の試料分析装置が開示されている。試料分析装置は、試料を収容するための試料チャンバと、試料が流れる経路を提供する通路と、バルブドライバと制御ユニットとに接続された通路を開くためのバルブとを含む、回転可能なマイクロ流体装置を含む。分離チャンバは、遠心力によって試料チャンバから流れる試料を受け取り、一方、標的細胞を収集するための収集チャンバは、分離チャンバに接続されている。使用時には、装置を回転させて、試料中の物質の密度勾配に従って試料を、分離チャンバ内で、例えばDGM層、RBC層、WBC層および血漿層などの複数の層に分離する。DGMと共に分離チャンバの最下部に位置するターゲット材料は、次いで回収のために収集チャンバに輸送される。
したがって、遠心マイクロ流体技術に基づく改良されたポイントオブケア診断アッセイシステムを提供することを目的とする。
本発明によれば、添付の特許請求の範囲に記載のマイクロ流体システムが提供される。マイクロ流体システムは、
モータに連結され、流体試料をカートリッジ上の複数の位置に移動させるように構成されたカートリッジであって、水平面に対して傾斜した平面上で回転するように構成されているカートリッジを備え、
カートリッジは、少なくとも3つの区域を有する山形または実質的にV字形の反応チャンバを有し、第1の区域はV字形反応チャンバの頂点の近くに配置されて検出区域を画定し、第2の区域はV字形反応チャンバの第1端の近くに配置され、第3の区域はV字形反応チャンバの第2端の近くに配置され、第2の区域および第3の区域のそれぞれは試薬区域を含み、
モータおよび制御モジュールは、遠心力と重力との組み合わせを提供して、前記流体試料を少なくとも3つの区域間で移動させるように構成される。
モータに連結され、流体試料をカートリッジ上の複数の位置に移動させるように構成されたカートリッジであって、水平面に対して傾斜した平面上で回転するように構成されているカートリッジを備え、
カートリッジは、少なくとも3つの区域を有する山形または実質的にV字形の反応チャンバを有し、第1の区域はV字形反応チャンバの頂点の近くに配置されて検出区域を画定し、第2の区域はV字形反応チャンバの第1端の近くに配置され、第3の区域はV字形反応チャンバの第2端の近くに配置され、第2の区域および第3の区域のそれぞれは試薬区域を含み、
モータおよび制御モジュールは、遠心力と重力との組み合わせを提供して、前記流体試料を少なくとも3つの区域間で移動させるように構成される。
本発明のカートリッジは、従来技術に対していくつかの利点を提供することが理解されよう。
・全体的なカートリッジの概念は、重力と遠心マイクロ流体法を使用する
・単体積反応。すなわち試薬の希釈、分取(aliquoting)、計量などの、一部または全部の必要性を排除し、操作を簡素化し、テスト精度を向上できる可能性がある
・精度を向上させるための、各アッセイ段階での単一キュベットでの連続光学測定
・逐次再水和(sequential rehydration)のための試薬R1および試薬R2の配置
・試料とバッファの均一混合
・バッファおよび/または試料の光学測定を実行する能力
・遠心力を用いたキュベット充填により一貫した光学調査のための当量の液体メニスカスの提供
・静的または動的(回転)方法を用いたアッセイ反応の光学的測定
一実施形態では、第1の検出区域はキュベットを含み、V字形反応チャンバの径方向範囲に配置される。
・全体的なカートリッジの概念は、重力と遠心マイクロ流体法を使用する
・単体積反応。すなわち試薬の希釈、分取(aliquoting)、計量などの、一部または全部の必要性を排除し、操作を簡素化し、テスト精度を向上できる可能性がある
・精度を向上させるための、各アッセイ段階での単一キュベットでの連続光学測定
・逐次再水和(sequential rehydration)のための試薬R1および試薬R2の配置
・試料とバッファの均一混合
・バッファおよび/または試料の光学測定を実行する能力
・遠心力を用いたキュベット充填により一貫した光学調査のための当量の液体メニスカスの提供
・静的または動的(回転)方法を用いたアッセイ反応の光学的測定
一実施形態では、第1の検出区域はキュベットを含み、V字形反応チャンバの径方向範囲に配置される。
一実施形態では、V字形チャンバは、2つの側部で径方向内向きに延びて、独立して流体で充填可能な2つの区域を作り出し、第2の区域と第3の区域とを画定する。
一実施形態では、第2および/または第3の区域は、試薬貯留区域および/または再水和区域を含む。
一実施形態では、第2および/または第3の区域は、試薬貯留区域および/または再水和区域を含む。
一実施形態では、第2および/または第3の区域は、光学調査用の区域を含む。
一実施形態では、カートリッジは、遠心力と重力との組み合わせが、流体試料を、それぞれ径方向外側および径方向内側に移動させるような速度で回転するように位置決めおよび構成される。
一実施形態では、カートリッジは、遠心力と重力との組み合わせが、流体試料を、それぞれ径方向外側および径方向内側に移動させるような速度で回転するように位置決めおよび構成される。
一実施形態では、相対遠心力(RCF)が重力よりも大きくなる速度でカートリッジが回転し、カートリッジで流体試料を径方向外側に移動させることができる。
一実施形態では、遠心力は、流体が第2の区域または第3の区域に到達しないことを確実にする。
一実施形態では、遠心力は、流体が第2の区域または第3の区域に到達しないことを確実にする。
一実施形態では、カートリッジは静止し又はゆっくり回転し、重力が流体に影響を及ぼし、流体を第2の区域または第3の区域に向かって移動させる。
一実施形態では、カートリッジは水平面に対して傾斜した平面上で回転または攪拌されて、流体試料が重力の影響下で流れるための下向きの傾斜を作り出す。
一実施形態では、カートリッジは水平面に対して傾斜した平面上で回転または攪拌されて、流体試料が重力の影響下で流れるための下向きの傾斜を作り出す。
一実施形態では、カートリッジは、流体の重力の影響下での流れを妨げる可能性のある表面張力の影響を克服するため攪拌されるようさらに構成可能である。
一実施形態では、カートリッジは、水平面からθiの角度の傾斜面上で回転し、前記の角度は10°から60°の間である。
一実施形態では、カートリッジは、水平面からθiの角度の傾斜面上で回転し、前記の角度は10°から60°の間である。
一実施形態では、バッファ貯留部は、カートリッジの回転中心の近くに配置され、モジュールは、カートリッジに試料を直接適用するように構成されている。
一実施形態では、流体試料メニスカスに対する支配的な力は、遠心力が第1の検出区域の上面および下面と平行になり、両面に均一にメニスカスを形成するような、遠心力である。
一実施形態では、流体試料メニスカスに対する支配的な力は、遠心力が第1の検出区域の上面および下面と平行になり、両面に均一にメニスカスを形成するような、遠心力である。
一実施形態では、第2の区域は乾燥試薬を含む。
一実施形態では、第3の区域は乾燥試薬を含む。
一実施形態では、乾燥試薬は、第2または第3の区域が流体試料およびバッファで再水和されるまでそのままである。
一実施形態では、第3の区域は乾燥試薬を含む。
一実施形態では、乾燥試薬は、第2または第3の区域が流体試料およびバッファで再水和されるまでそのままである。
一実施形態では、乾燥試薬は、前記第2および/または第3の区域内の単一または複数のスポットに配置することができる。
一実施形態では、第2または第3の区域は複数の乾燥試薬を含む。
一実施形態では、第2または第3の区域は複数の乾燥試薬を含む。
一実施形態では、キュベットは、アッセイの各段階で使用されるバッファ、流体試料および再水和試薬の光学的測定を可能にするように構成されている単一容量キュベットを含む。
一実施形態では、システムは、免疫濁度法または酵素ベースの臨床化学アッセイを実施するように構成される。
別の実施形態では、マイクロ流体システムが提供される。マイクロマイクロ流体システムは、
モータに連結されるカートリッジであって、流体試料をカートリッジ上の複数の位置に移動させるようになっているカートリッジを備え、
カートリッジは、少なくとも3つの区域を有する山形または実質的にV字形の反応チャンバを含み、第1の区域はV字形反応チャンバの頂点の近くに配置されて検出区域を画定し、第2の区域はV字形反応チャンバの第1端の近くに配置され、第3の区域はV字形反応チャンバの第2端の近くに配置され、
モータおよび制御モジュールは、遠心力と重力との組み合わせを提供して、前記流体試料を少なくとも3つの区域間で移動させるように構成される。
別の実施形態では、マイクロ流体システムが提供される。マイクロマイクロ流体システムは、
モータに連結されるカートリッジであって、流体試料をカートリッジ上の複数の位置に移動させるようになっているカートリッジを備え、
カートリッジは、少なくとも3つの区域を有する山形または実質的にV字形の反応チャンバを含み、第1の区域はV字形反応チャンバの頂点の近くに配置されて検出区域を画定し、第2の区域はV字形反応チャンバの第1端の近くに配置され、第3の区域はV字形反応チャンバの第2端の近くに配置され、
モータおよび制御モジュールは、遠心力と重力との組み合わせを提供して、前記流体試料を少なくとも3つの区域間で移動させるように構成される。
本発明は、添付の図面を参照して、単なる例として与えられる、その実施形態の以下の説明からより明確に理解されるであろう。
2段階乾燥試薬アッセイを自己完結型/単回使用型/使い捨てポイントオブケア(POC)カートリッジに移すのに必要とされるいくつかの逐次的工程を示すフローチャートである。
本発明の第1の実施形態に係るアッセイ手順を実行するためのカートリッジ設計の実施形態を示す図である。
試薬の再水和を示すカートリッジ表面の直視図を示す。
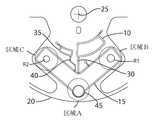
一実施形態に係る、少なくとも3つの区域を有する山形または実質的にV字形の反応チャンバを示す図である。
動作中のモータプラットフォームに装着されたカートリッジの側面図である。
遠心力によってキュベットを満たすことの利点を示す図である。
遠心力によってキュベットを満たすことの利点を示す図である。
遠心力によってキュベットを満たすことの利点を示す図である。
第3の試薬区域内の第2の乾燥試薬スポットを使用する本発明の一実施形態に係るアッセイシーケンスを実行するためのカートリッジ設計の実施形態を示す。
図1は、2段階乾燥試薬アッセイを自己完結型/単回使用型/使い捨てポイントオブケア(POC)カートリッジに移すのに必要とされるいくつかの逐次的工程を示す。このシーケンスは、試験測定を完了するために試薬R1および試薬R2の2段階添加および再水和を必要とする免疫濁度法および酵素ベースの臨床化学アッセイに適用することができる。同様の試験シーケンスは、試薬R1または試薬R2のみが使用される1段階アッセイに使用することができる。
POCカートリッジは、バッファ貯留部を含むことができ、試料(例えば全血、血漿、血清)をカートリッジに適用するための手段を有するであろう。カートリッジは、独立して再水和することができるカートリッジ上の特定の位置に貯留された乾燥した固定化試薬(R1およびR2)を含み得る。試料をシーケンスのどこに追加するか(図1のオプション(a)または(b))に応じて、R1は希釈試料(バッファ+試料)またはバッファのみで再水和でき、R2はこれと同じ液量で再水和される。
図2は、本発明の第1の実施形態に係る、図1のフローチャートに示されるアッセイ手順を実行するためのカートリッジ設計の実施形態を示す。カートリッジ設計は、流体をカートリッジ上の複数の位置に移動させるために、遠心力マイクロ流体技術と重力マイクロ流体技術の組み合わせを使用する。カートリッジ5は、回転中心25に又は回転中心25の近くに位置するバッファ貯留部10を含む。試料をカートリッジに直接適用するための手段も提供される(図2には図示せず)。以下に詳細に説明するカートリッジの配置は、以下の問題を解決する。
・単体積反応。すなわち試薬の希釈、分取(aliquoting)、計量などの、一部または全部の必要性を排除し、操作を簡素化し、試験精度を向上できる可能性がある。
・精度を向上させるための、各アッセイ段階での単一キュベットでの連続光学測定
・逐次再水和(sequential rehydration)のための異なる区域における試薬R1および試薬R2の配置
・試料とバッファの均一混合およびバッファおよび/または試料について光学的測定を実行する能力
図2を参照すると、カートリッジ5は、少なくとも3つの区域を有する山形または実質的にV字形の反応チャンバ15を含む。第1の区域は、検出区域を画定するためにV字型反応チャンバの頂点付近に配置されている。第2の区域は、V字型反応チャンバの第1端付近に配置される。第3の区域は、V字型反応チャンバの第2端付近に配置される。モータおよび制御モジュールは、遠心力と重力との組み合わせを提供して、前記流体試料を3つの区域間で移動させるように構成されている。
・単体積反応。すなわち試薬の希釈、分取(aliquoting)、計量などの、一部または全部の必要性を排除し、操作を簡素化し、試験精度を向上できる可能性がある。
・精度を向上させるための、各アッセイ段階での単一キュベットでの連続光学測定
・逐次再水和(sequential rehydration)のための異なる区域における試薬R1および試薬R2の配置
・試料とバッファの均一混合およびバッファおよび/または試料について光学的測定を実行する能力
図2を参照すると、カートリッジ5は、少なくとも3つの区域を有する山形または実質的にV字形の反応チャンバ15を含む。第1の区域は、検出区域を画定するためにV字型反応チャンバの頂点付近に配置されている。第2の区域は、V字型反応チャンバの第1端付近に配置される。第3の区域は、V字型反応チャンバの第2端付近に配置される。モータおよび制御モジュールは、遠心力と重力との組み合わせを提供して、前記流体試料を3つの区域間で移動させるように構成されている。
動作中、反応チャンバ15へと到達する前に、その貯留部10および/または後続のバッファチャンバからの貯留されたバッファの運搬が遠心力を使用して制御される。反応チャンバ15は、使用されるバッファ反応容量よりもはるかに大きいような大きさである。反応チャンバ15は、3つの異なる区域、すなわち、A)キュベット検出区域、B)R1試薬区域、およびC)R2試薬区域を組み込んでいる。キュベット45は反応チャンバ15の径方向範囲(典型的にはカートリッジ外径20の近く)に配置されている。チャンバは、両側で径方向内向きに延びて、R1の反応用およびR2の反応用の流体で独立して満たすことができる2つの区域を作り出す。各区域は、バッファによって占められたときに、それらが区域内に全体積を保持できるようにサイズ設定されることが有益である。すなわち、区域A、BまたはCの容積は緩衝容積と等しいかそれ以上であり、反応チャンバ15全体は、バッファ容積の少なくとも3倍大きい。
典型的には、流体の主要移動手段として遠心マイクロ流体技術を用いて流体を径方向内側に移動させることは非常に困難である。これは、順次アッセイを実施することを可能にするために利用可能な選択肢を制限/制限し得る。この問題を克服するために、遠心力と重力との組み合わせを用いて流体を径方向外側および径方向内側にそれぞれ移動させる。相対遠心力(RCF)が重力よりはるかに大きい速度でカートリッジ5が回転すると、遠心力が支配的となり、流体はカートリッジを径方向外側に移動できる。カートリッジ5が静止しているかまたはゆっくり回転しているとき、重力は依然として流体に影響を及ぼし、流体を移動させるために使用できる。これを利用するために、カートリッジ5は、カートリッジ5が静的に配置されて流体が流れるための下向きの傾斜を作り出すことができるように(水平から)傾斜した平面上で回転する。この方法は、カートリッジが特定の向きに整列しているときに流体をカートリッジ上で径方向内側に移動させるために使用することができる。また、流体の流れを妨げる可能性がある表面張力の影響を克服するために、重力下での流体の流れを、穏やかな攪拌/振とうによって補助することもできる。
図2において、バッファチャンバの中央に貯留されているバッファは、遠心力によって(毛細管弁30を介して)反応チャンバ15に送られる。このバッファ容量はキュベット45を満たし(区域A)、バッファのブランク測定を行うことができる。次に、試料チャンバ35に適用された試料も、遠心力によって(毛細管弁40を介して)反応チャンバ15内に送られ(区域A)、そこでバッファと混合される。試料チャンバは、追加の試料処理ステップ、限定するものではないが血漿分離または全血溶解など、を含み得ることが理解されるであろう。必要に応じ、試験シーケンスのこの時点で試料測定が行われてもよい(内部標準として使用できるであろう)。バッファおよび試料を送る両工程の間、遠心力は、流体が区域Bまたは区域Cに到達しないことを確実にし、乾燥試薬は、R1およびR2が再水和されるまでそのままである。
次いで、カートリッジ5を整列させて、区域A内の流体が重力下で区域Bに流れることを可能にする(必要であれば穏やかな撹拌によって補助される)。試料およびバッファの懸濁液は、試薬R1を濡らし、試薬R1を再水和し始める。完全な再水和が達成されるまで、再水和は規定期間継続する。この再水和は混合/撹拌によって促進できる。完全に再水和されると、遠心力を用いて試料、バッファおよびR1の懸濁液をキュベット45(区域A)に戻し、そこでこの懸濁液で較正測定を行うことができる。図3は、試薬の再水和を示すカートリッジ表面の直視図を示す。
試薬R1の再水和と同様に、カートリッジ5は、次に、流体がキュベット45から区域Cに流れることを可能にするように配向され、区域Cにおいて、試薬R2はバッファ、試料およびR1の懸濁液によって濡らされる。再び、両方の乾燥試薬が完全に再水和されるまで、再水和は規定期間継続する。カートリッジ5での混合撹拌によって、再水和を再び促進することができる。最後に、全液体容量がキュベット45(区域A)に戻され、そこで最終反応を監視することができる。試薬R1および/または試薬R2を単一または複数のスポットに配置することができることは注目に値する。
図4に示されているのは、半径r1および半径r2、角度θおよび角度θ2、ならびに長さLである。簡略化のために試薬スポットの位置は示されていない。r1は区域Bおよび区域Cの反応チャンバの遠位側の壁が位置する半径であり、r2はキュベットが区域Aの中心にある半径である。長さLは、反応チャンバの遠位側の壁の長さである。θは、中心線(回転中心25とキュベットの中心を通過するように設けられる)から壁が画定される角度であり、θ2は、(回転中心を通る)概念的な中心線とチャンバの範囲内の反応チャンバの遠位側の壁との間に形成される角度である。この実施形態では、反応チャンバは、中心線に関して対称的に設計されておりこれは有利ではあるが、必須ではなく、非対称的に設計することができる。チャンバ壁の長さ(L)は、角度θ2が<90°になるような点を超えて延びないことが好ましい。角度θ2が≧90°のままであるとき、半径r1<r2が確保される。遠心力の下では、これは流体がr2のキュベット区域に戻ることを可能にする。なぜなら流体は外径側へ向かう傾向があるからである。
図5は、動作中に装着されたカートリッジ5の側面図を示す。カートリッジは(水平から)角度θ1だけ傾斜した平面上で回転する。傾斜角は10°から60°の間、好ましくは30°であることが理想的である(これは、十分な重力を与え、そして使用を容易にするために有益である)。遠心力と重力の方向も強調される。遠心力は常に回転軸に垂直である。すなわち、回転すると径方向(外側)に作用する。
例えば、図3は、ゼロ位置から120°の角度で整列するように回転したカートリッジを示す。一実施形態では、ゼロ位置は、操作を可能にするために回転中心に対するカートリッジ平面の最下点とすることができる。この位置では、カートリッジは傾斜した平面上に固定されているので、区域Aからの流体で区域Bを満たすことができる。試薬の再水和が区域Bで行われた後、流体を遠心駆動方式または重力駆動方式により検出のために区域A(キュベット)に戻すことができる。しかしながら、遠心力を用いてキュベットを安定して充填することが非常に好ましい。
図6、図7および図8は、重力とは対照的に、遠心力によってキュベットを満たすことの利点を示す。光学検出経路はカートリッジ表面に対して垂直であり、従ってカートリッジ5が傾斜する角度に対して垂直に整列している。部分的にまたは不十分に満たされたキュベットから生じる光学的不規則性がないことを確実にするために、キュベットが流体の列によって完全にかつ一貫して満たされることが重要である。キュベットが重力で満たされている場合、液体メニスカスにかかる主な力は重力であるため、メニスカスの形状は不均一になり、上下のキュベット表面がさまざまなレベルで濡らされる可能性がある(図6)。しかし、遠心力で満たされたとき(図7)、液体メニスカスに支配的な力は遠心力である。遠心力は、キュベットの上下面に平行であるため、メニスカスは両面に均等に形成されます。これにより、光学測定中に検出区域が常に十分に流体で満たされることになる。図8は、回転軸に対して垂直にカートリッジを見たときに形成されたメニスカスを示す。光学経路(図示よりも大きくても小さくてもよい)は、遠心力によって完全に満たすことができる。さらに、遠心力による充填はまた、捕捉された空気の泡が光学窓内に形成されるのを防止することによって、キュベットに空気が完全に無くなることを確実にする。
図9は、第3の試薬区域内で第2の乾燥試薬スポットを使用する本発明の一実施形態に係るアッセイシーケンスを実行するためのカートリッジ設計の実施形態を示す。図9では、バッファチャンバ10の中央に貯留されているバッファは、遠心力によって(毛細管弁30を介して)反応チャンバ15に送られる。このバッファ容量はキュベット45を満たし(区域A)、バッファのブランク測定を行うことができる。次に、試料チャンバ35内の適用された試料も、遠心力によって(毛細管弁40を介して)反応チャンバ15内に送られ(区域A)、そこでバッファと混合される。必要に応じ、試験シーケンスのこの時点で試料測定を行われてもよい(内部標準として使用できるであろう)。バッファおよび試料を送る両工程の間、遠心力は、流体が区域Bまたは区域Cに到達しないことを確実にし、乾燥試薬は、R1およびR2が再水和されるまでそのままである。
次に、カートリッジを整列させて、区域A内の液体が重力下で区域Bに流れることを可能にする(必要であれば穏やかな撹拌によって補助される)。試料およびバッファの懸濁液は、試薬R1を濡らし、試薬R1を再水和し始める。完全な再水和が達成されるまで、再水和は規定期間継続する。この再水和は混合/撹拌によって促進できる。完全に再水和されると、遠心力を用いて試料、バッファおよびR1の懸濁液をキュベット45(区域A)に戻し、そこでこの懸濁液で較正測定を行うことができる。
試薬R1の再水和と同様に、カートリッジは、次に、流体が、キュベット45から区域Cに流れることを可能にするように配向され、区域Cにおいて、(試薬R2−Aと試薬R2−Bに分割されている)試薬R2は、バッファ、試料およびR1の懸濁液で濡らされる。再び、両方の乾燥試薬が完全に再水和されるまで、再水和は規定期間継続する。カートリッジの混合攪拌によって、再水和を再び促進することができる。最後に、全液体容量をキュベット45(区域A)に戻され、そこで最終反応を監視することができる。試薬R1および/または試薬R2は、単一または複数のスポットに配置することができる。
上記の説明から、本発明のマイクロ流体システムは、任意の種類の免疫濁度法および酵素ベースの臨床化学アッセイを実施するのに適していることが理解されよう。さらに、本発明のマイクロ流体システムは、単一の試薬の添加および再水和を必要とするアッセイを実施するため、ならびに、複数の試薬の添加および再水和を必要とするアッセイを実施するために使用することができるので、非常に融通性がある。これは、カートリッジの第2の試薬区域および/または第3の試薬区域がそれぞれ複数の試薬スポットを備えることができるという事実によるものである。
本明細書において、用語「備える」またはその任意の変形は、完全に互換的であると考えられ、それらはすべて、可能な限り広い解釈又は逆を可能にするために提供されるべきである。
本発明は、上記の実施形態に限定されず、構成および詳細の両方において変更することができる。
Claims (15)
- モータに連結されているカートリッジであって、流体試料をカートリッジ上の複数の位置に移動させるように構成され、水平面に対して傾斜した平面上で回転するように構成されるカートリッジを備え、
前記カートリッジは、少なくとも3つの区域を有する山形または実質的にV字形の反応チャンバを有し、第1の区域は前記V字形反応チャンバの頂点近くに配置されて検出区域を画定し、第2の区域は前記V字形反応チャンバの第1端の近くに配置され、第3の区域は前記V字形反応チャンバの第2端の近くに配置され、前記第2の区域および前記第3の区域のそれぞれは、試薬区域を含み、
前記モータおよび制御モジュールは、遠心力と重力との組み合わせを提供して、前記流体試料を少なくとも前記3つの区域間で移動させるように構成される、
マイクロ流体システム。 - 前記第1の区域はキュベットを含み、前記カートリッジの外径に隣接して配置されている、
請求項1に記載のマイクロ流体システム。 - 前記V字型チャンバは、2つの側部で前記第1の区域から径方向内向きに延びて、独立して流体で充填可能な2つの区域を作り出し、前記第2の区域と前記第3の区域とを画定する、
請求項1又は2に記載のマイクロ流体システム。 - 前記カートリッジは、動作時に、遠心力と重力との組み合わせが、前記流体試料をそれぞれ径方向外側および径方向内側に移動させるような速度で、前記傾斜面上で回転するように構成される、
請求項1から3のいずれか1項に記載のマイクロ流体システム。 - 前記カートリッジは相対遠心力(RCF)が重力よりも大きくなるような速度で回転するように構成され、前記カートリッジで前記流体試料を径方向外側に移動させることができる、
請求項1から4のいずれか1項に記載のマイクロ流体システム。 - 前記流体試料が前記遠心力の影響下にあるとき、前記カートリッジは、流体が前記第2の区域または前記第3の区域に到達しないように構成されている、
請求項1から5のいずれか1項に記載のマイクロ流体システム。 - 前記カートリッジは静止し又はゆっくり回転するように構成されているとき、重力が流体に影響を及ぼし、前記流体を第2の区域または第3の区域に向かって移動させる、
請求項1から6のいずれか1項に記載のマイクロ流体システム。 - 前記カートリッジは、前記流体が重力の影響下での流れを妨げる可能性のある表面張力の影響を克服するため攪拌されるようにさらに構成可能である、
請求項7に記載のマイクロ流体システム。 - 前記第2の区域は乾燥試薬を含む、
請求項1から8のいずれか1項に記載のマイクロ流体システム。 - 前記第3の区域が乾燥試薬を含む、
請求項1から9のいずれか1項に記載のマイクロ流体システム。 - 前記カートリッジでは、前記乾燥試薬は、前記第2の区画または前記第3の区域が前記流体試料およびバッファで再水和されるまでそのままであるように構成されている、
請求項9または10に記載のマイクロ流体システム。 - 前記乾燥試薬は、前記第2の区域および/または第3の区域内の単一または複数のスポットに配置可能である、
請求項9から11のいずれか1項に記載のマイクロ流体システム。 - 前記第2の区域または前記第3の区域は、複数の乾燥試薬を含む、
請求項9から12のいずれか1項に記載のマイクロ流体システム。 - 前記キュベットは、アッセイの各段階で使用される前記バッファ、前記流体試料、および前記再水和された試薬の光学的測定を可能にするように構成されている単一容量キュベットを含む、
請求項11から13のいずれか1項に記載のマイクロ流体システム。 - 前記システムは、免疫濁度法または酵素ベースの臨床化学アッセイを実施するように構成されている、
請求項1から14のいずれか1項に記載のマイクロ流体システム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662413019P | 2016-10-26 | 2016-10-26 | |
| EP16195853 | 2016-10-26 | ||
| EP16195853.3 | 2016-10-26 | ||
| US62/413,019 | 2016-10-26 | ||
| PCT/EP2017/077365 WO2018077983A1 (en) | 2016-10-26 | 2017-10-25 | A point-of-care diagnostic assay cartridge |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019537003A true JP2019537003A (ja) | 2019-12-19 |
Family
ID=60413135
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019522290A Pending JP2019537003A (ja) | 2016-10-26 | 2017-10-25 | ポイントオブケア診断アッセイカートリッジ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11420203B2 (ja) |
| EP (1) | EP3532202A1 (ja) |
| JP (1) | JP2019537003A (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20200064254A1 (en) * | 2018-08-23 | 2020-02-27 | Truvian Sciences, Inc. | Devices With Optically Readable Liquid Reservoirs |
| AU2020373075A1 (en) * | 2019-11-01 | 2022-05-19 | Redbud Labs, Inc. | Active surface devices for and methods of providing dried reagents in microfluidic applications |
| WO2021189054A1 (en) | 2020-03-20 | 2021-09-23 | Orbis Diagnostics Limited | Multi-chambered assay devices and associated methods, systems and apparatuses thereof for detection of analytes |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5247460B2 (ja) * | 2006-10-31 | 2013-07-24 | パナソニック株式会社 | マイクロチップ |
| KR102176587B1 (ko) * | 2013-10-15 | 2020-11-10 | 삼성전자주식회사 | 시료분석장치, 시료분석방법, 및 밸브의 동적 작동 방법 |
-
2017
- 2017-10-25 JP JP2019522290A patent/JP2019537003A/ja active Pending
- 2017-10-25 US US16/343,176 patent/US11420203B2/en active Active
- 2017-10-25 EP EP17801350.4A patent/EP3532202A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| US11420203B2 (en) | 2022-08-23 |
| EP3532202A1 (en) | 2019-09-04 |
| US20190314813A1 (en) | 2019-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9737890B2 (en) | Microfluidic device and method for operating thereof | |
| US8327726B2 (en) | Microfluidic device | |
| US7247487B2 (en) | Reducing working fluid dilution in liquid systems | |
| US8491840B2 (en) | Microfluidic device, sample analyzing method using the same, and dilution ratio measuring method | |
| US8486333B2 (en) | Centrifugal fluid analyzer rotor | |
| EP2133150A1 (en) | Lab-on-disc device | |
| US20040166551A1 (en) | Detection of agglutination of assays | |
| BR112012016286B1 (pt) | método de processar e/ou analisar uma amostra sob força centrífuga e cartucho para processamento de amostra | |
| JP2007520693A (ja) | 被検体物のマイクロ流体デバイスへの取り込みならびに収納の方法および装置 | |
| JP2009014529A (ja) | 分析用デバイス、分析用デバイスを用いる分析装置、および液体試料成分測定方法 | |
| JPWO2008053743A1 (ja) | マイクロチップ及びそれを用いた分析装置 | |
| JP7163558B2 (ja) | 分離装置及び分離方法、分離デバイス、並びに検査装置及び検査方法 | |
| JP4752546B2 (ja) | 遠心分離デバイス及び遠心分離方法 | |
| JP2019537003A (ja) | ポイントオブケア診断アッセイカートリッジ | |
| KR20160149213A (ko) | 마이크로플레이트 | |
| EP3784394B1 (en) | An improved point-of-care diagnostic assay cartridge | |
| WO2018077983A1 (en) | A point-of-care diagnostic assay cartridge | |
| US20220387992A1 (en) | A point-of-care test cartridge | |
| JP5407150B2 (ja) | 免疫分析方法 |