JP2019209701A - Vehicle control device and vehicle control method - Google Patents
Vehicle control device and vehicle control method Download PDFInfo
- Publication number
- JP2019209701A JP2019209701A JP2018104311A JP2018104311A JP2019209701A JP 2019209701 A JP2019209701 A JP 2019209701A JP 2018104311 A JP2018104311 A JP 2018104311A JP 2018104311 A JP2018104311 A JP 2018104311A JP 2019209701 A JP2019209701 A JP 2019209701A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- lane
- follow
- host
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
本発明は、車両制御装置および車両制御方法に関し、特に、前方を走行する車両を追従して走行する追従走行機能を有する車両の制御に関する。 The present invention relates to a vehicle control device and a vehicle control method, and more particularly to control of a vehicle having a follow-up running function of running following a vehicle that runs ahead.
近年の車両には、先行車両に対して追従走行が実行可能なクルーズコントロール機能が付加されたものがある。このようなクルーズコントロール機能を用いれば、前方に車両が存在しない場合には、設定した速度で走行し、前方に車両が存在する場合には、当該前方の車両との車間距離を設定した距離に維持することができる。 Some vehicles in recent years are provided with a cruise control function capable of performing follow-up traveling with respect to a preceding vehicle. If such a cruise control function is used, the vehicle travels at the set speed when there is no vehicle ahead, and when the vehicle exists ahead, the distance between the vehicle ahead is set to the set distance. Can be maintained.
ところで、前方の車両に対して所定の距離を維持した状態で追従走行している状態で、自車両と前方の車両との間に隣車線から別の車両が割り込んできた場合には、当該割り込み車両が追従対象となる。 By the way, if another vehicle is interrupted from the adjacent lane between the host vehicle and the preceding vehicle while following the vehicle while maintaining a predetermined distance with respect to the preceding vehicle, the interruption The vehicle is the target of tracking.
このような状況では、自車両は、割り込み車両との車間距離を設定した距離とするために、一次的に急減速し、車間距離が設定した距離となった時点で再び加速するという状況が発生することがある。このような車両の割り込みによる急激な加減速は、運転者に対して違和感および不快感を覚えさせ、強いストレスを与える原因となる。 In such a situation, the host vehicle suddenly decelerates temporarily in order to set the inter-vehicle distance from the interrupting vehicle, and then accelerates again when the inter-vehicle distance reaches the set distance. There are things to do. Such rapid acceleration / deceleration due to vehicle interruption causes the driver to feel uncomfortable and uncomfortable, and causes a strong stress.
上記のような問題に対して、特許文献1では、追従走行時に前方に車両が割り込んだ場合にも、急減速するのを抑制するための技術が開示されている。特許文献1に開示の技術では、自車両の側方を走行する車両を検出した場合に、当該車両の速度の推移を記録する。そして、当該技術では、側方の車両が車線変更を開始した時点で、先に記録した速度の推移から当該割り込み車両の数秒後の速度を予測して、その予測結果に基づいて自車両の目標速度を設定することとしている。
With respect to the above problems,
しかしながら、上記特許文献1に開示の技術では、側方の車両が自車両の前に割り込んだ場合における、急激な加減速を抑制するという観点から改善の余地がある。即ち、上記特許文献1に開示の技術では、側方の車両が比較的速い速度で走行し、その状態で割り込みを介した場合には、自車両の速度は余り減速されないまま側方の車両が割り込むこととなる。この場合には、側方車両の割り込みにより、当該割り込み車両との車間距離を空けようとして急激な減速がなされる場合が生じ得る。このため、上記特許文献1に開示の技術では、より滑らかな追従走行を実現する上で改善の余地がある。
However, in the technique disclosed in
本発明は、上記のような問題の解決を図ろうとなされたものであって、追従走行中に自車両と先行車両との間に他車両が割り込んできた場合にあっても、滑らかな加減速での走行が可能な車両制御装置および車両制御方法を提供することを目的とする。 The present invention has been made to solve the above-described problems, and even when another vehicle is interrupted between the host vehicle and the preceding vehicle during follow-up, smooth acceleration / deceleration is achieved. An object of the present invention is to provide a vehicle control device and a vehicle control method capable of traveling on the road.
本発明の一態様に係る車両制御装置は、先行車両に追従して走行する追従走行機能を有する車両の制御を実行する車両制御装置であって、自車両が走行する自車線と、当該自車線に対して隣接する隣車線と、を検出する車線検出部と、前記自車線における前記自車両の前方を走行する前記先行車両と、前記隣車線を走行し、前記自車両の側方またはその前後を走行する他車両と、のそれぞれの速度および相互間での距離を検出する速度・距離検出部と、前記自車両の運転者からの、追従走行の実行指示を受け付ける追従走行指示受付部と、前記車線検出部および前記速度・距離検出部からの検出結果と、前記追従走行指示受付部からの受付結果と、に基づき、前記自車両の加減速制御を実行する車両制御部と、を備え、前記車両制御部は、前記先行車両に対して前記追従走行が実行されている場合であって、前記他車両が前記自車線における前記先行車両と前記自車両との間に進入を開始した場合に、前記自車両と前記先行車両との相対速度および相対距離と、前記自車両と前記他車両との相対速度および相対距離と、に基づいて、前記自車両と前記先行車両との間に仮想的な車両である仮想車両を想定し、前記仮想車両に対して追従走行するように加減速制御を実行する。 A vehicle control device according to one aspect of the present invention is a vehicle control device that performs control of a vehicle having a follow-up running function of running following a preceding vehicle, the own lane on which the own vehicle is traveling, and the own lane A lane detector that detects the adjacent lane adjacent to the vehicle, the preceding vehicle that travels in front of the host vehicle in the host lane, the side of the host vehicle that travels in the adjacent lane, and its front and rear A speed / distance detector that detects the respective speeds and distances between the other vehicles traveling on the vehicle, a follow-up travel instruction reception unit that receives an execution instruction of the follow-up travel from the driver of the host vehicle, A vehicle control unit that executes acceleration / deceleration control of the host vehicle based on the detection result from the lane detection unit and the speed / distance detection unit and the reception result from the follow-up travel instruction reception unit; The vehicle control unit When the follow-up traveling is being executed with respect to the preceding vehicle, and the other vehicle starts entering between the preceding vehicle and the own vehicle in the own lane, the own vehicle and the preceding vehicle A virtual vehicle that is a virtual vehicle between the host vehicle and the preceding vehicle based on the relative speed and relative distance with the vehicle and the relative speed and relative distance between the host vehicle and the other vehicle. Assuming that acceleration / deceleration control is executed so as to follow the virtual vehicle.
上記態様に係る車両制御装置では、先行車両に対して追従走行している状態で、隣車線から他車両が割り込みを開始した時点で、先行車両との間に仮想車両を想定して、当該仮想車両を追従走行のターゲットとすることとしている。このため、上記態様に係る車両制御装置では、他車両の割り込み開始時点で、先行車両との間に想定した仮想車両との間で車間距離および相対速度を制御することとなり、他車両が完全に自車両の前方に割り込むよりも前に時間的に余裕を以って減速等がなされる。 In the vehicle control device according to the above aspect, when the other vehicle starts to interrupt from the adjacent lane in a state of following the preceding vehicle, the virtual vehicle is assumed to be between the preceding vehicle and the virtual vehicle. The vehicle is assumed to be the target of follow-up running. For this reason, in the vehicle control device according to the above aspect, the inter-vehicle distance and the relative speed are controlled with the virtual vehicle assumed between the preceding vehicle and the other vehicle at the start of interruption of the other vehicle. Deceleration or the like is performed with a time margin before interruption in front of the host vehicle.
従って、上記態様に係る車両制御装置では、追従走行中に自車両と先行車両との間に他車両が割り込んできた場合にあっても、滑らかな加減速での追従走行が可能である。 Therefore, in the vehicle control device according to the above aspect, even if another vehicle is interrupted between the host vehicle and the preceding vehicle during the follow-up running, the follow-up running with smooth acceleration / deceleration is possible.
なお、上記態様において、「隣車線」とは、自車線に対して並行して設けられた車線だけでなく、前方で自車線に合流するような合流車線も含む。 In the above aspect, the “adjacent lane” includes not only a lane provided in parallel to the own lane but also a merging lane that merges with the own lane ahead.
上記態様に係る車両制御装置において、前記車線検出部は、撮像部を含み、当該撮像部が撮像した前記自車線および前記隣車線の両脇の区画線を基に、前記自車線および前記隣車線を検出し、前記車両制御部は、前記他車両が前記自車線の両脇の前記区画線の内の前記隣車線側の前記区画線を跨いだ時点で、前記他車両が前記自車線に進入を開始したと判断する、とすることもできる。 In the vehicle control device according to the aspect, the lane detection unit includes an imaging unit, and the own lane and the adjacent lane are based on the lane lines on both sides of the own lane and the adjacent lane captured by the imaging unit. The vehicle control unit detects that the other vehicle enters the own lane when the other vehicle crosses the lane marking on the adjacent lane side of the lane markings on both sides of the own lane. It can also be determined that it has started.
上記の車両制御装置では、撮像部が車線の両脇の区画線を撮像し、当該撮像結果より、他車両が区画線を他車両が跨いだ時点を、他車両が自車線に進入を開始した時点とするので、仮想車両を想定する時点を早期に設定することができる。 In the above vehicle control device, the imaging unit images the lane markings on both sides of the lane, and from the imaging result, the other vehicle starts entering the own lane when the other vehicle straddles the lane marking. Since it is a time, the time which assumes a virtual vehicle can be set at an early stage.
上記態様に係る車両制御装置において、前記自車線の幅は、前記自車両の車幅よりも広い、とすることもできる。 In the vehicle control device according to the above aspect, the width of the own lane may be wider than the width of the own vehicle.
上記の車両制御装置のように車線幅が車幅よりも広い場合でも、上記のように、滑らかな加減速を以って追従走行を行うことができる。 Even when the lane width is wider than the vehicle width as in the vehicle control device described above, the following traveling can be performed with smooth acceleration and deceleration as described above.
上記態様に係る車両制御装置において、前記車両制御部は、前記追従走行が実行され、前記他車両が前記進入を開始した時点で、当該時点から所定期間の経過後における、前記先行車両および前記他車両の前記自車両に対する相対的な位置を推定し、当該推定した位置に基づいて前記仮想車両を想定する、とすることもできる。 In the vehicle control device according to the aspect described above, the vehicle control unit is configured to perform the following traveling and execute the preceding vehicle and the other after a predetermined period from the time when the other vehicle starts entering. It is also possible to estimate a relative position of the vehicle with respect to the host vehicle and assume the virtual vehicle based on the estimated position.
上記の車両制御装置では、他車両が自車線への進入を開始した時点から、所定期間の経過後における先行車両および他車両の位置を推定した上で仮想車両を想定するので、他車両が実際に自車両と先行車両との間に割り込んだ場合と同様の状況を想定することができるので、より滑らかな加減速を以って追従走行が実行される。 In the above vehicle control device, since the position of the preceding vehicle and the other vehicle after the lapse of a predetermined period is estimated from the time when the other vehicle starts entering the own lane, the virtual vehicle is assumed. Since it is possible to assume the same situation as when the vehicle is interrupted between the host vehicle and the preceding vehicle, the follow-up traveling is executed with smoother acceleration / deceleration.
本発明の一態様に係る車両制御方法は、先行車両に追従して走行する追従走行機能を有する車両を制御する車両制御方法であって、自車両が走行する自車線と、当該自車線に対して隣接する隣車線と、を検出する車線検出ステップと、前記自車線における前記自車両の前方を走行する前記先行車両と、前記隣車線を走行し、前記自車両の側方またはその前後を走行する他車両と、のそれぞれの速度および相互間での距離を検出する速度・距離検出ステップと、前記自車両の運転者からの、追従走行の実行指示を受け付ける追従走行指示受付ステップと、前記車線検出ステップおよび前記速度・距離検出ステップで検出された結果と、前記追従走行指示受付ステップでの受付結果と、に基づき、前記自車両の加減速制御を実行する車両制御ステップと、を備え、前記車両制御ステップは、前記先行車両に対して前記追従走行が実行されており、前記他車両が前記自車線における前記先行車両と前記自車両との間に進入を開始した場合に、前記自車両と前記先行車両との相対速度および相対距離と、前記自車両と前記他車両との相対速度および相対距離と、に基づいて、前記自車両と前記先行車両との間に仮想的な車両である仮想車両を想定する想定サブステップと、前記仮想車両に対して追従走行するように加減速制御を実行する加減速制御サブステップと、を有する。 A vehicle control method according to an aspect of the present invention is a vehicle control method for controlling a vehicle having a follow-up running function of running following a preceding vehicle, the own lane on which the own vehicle runs, and the own lane A lane detecting step for detecting adjacent lanes adjacent to each other, the preceding vehicle traveling in front of the own vehicle in the own lane, traveling in the adjacent lane, and traveling sideways or in front of and behind the own vehicle. A speed / distance detection step for detecting respective speeds and distances between the other vehicle, a follow-up travel instruction reception step for receiving an execution instruction for follow-up travel from the driver of the host vehicle, and the lane A vehicle control step for executing acceleration / deceleration control of the host vehicle based on the detection result in the detection step and the speed / distance detection step and the reception result in the follow-up travel instruction reception step. In the vehicle control step, the follow-up traveling is executed with respect to the preceding vehicle, and the other vehicle starts to enter between the preceding vehicle and the own vehicle in the own lane. The relative speed and relative distance between the host vehicle and the preceding vehicle, and the relative speed and relative distance between the host vehicle and the other vehicle, between the host vehicle and the preceding vehicle. An assumption sub-step that assumes a virtual vehicle that is a virtual vehicle, and an acceleration / deceleration control sub-step that executes acceleration / deceleration control so as to follow the virtual vehicle.
上記態様に係る車両制御方法では、加減速制御ステップにおいて、先行車両に対して追従走行しているおり、隣車線から他車両が割り込みを開始した時点で、先行車両との間に仮想車両を想定して、当該仮想車両を追従走行のターゲットとすることとしている。このため、上記態様に係る車両制御方法では、他車両の割り込み開始時点で、先行車両との間に想定した仮想車両との間で車間距離および相対速度を制御することとなり、他車両が完全に自車両の前方に割り込むよりも前に時間的に余裕を以って減速等がなされる。 In the vehicle control method according to the above aspect, in the acceleration / deceleration control step, the vehicle follows the preceding vehicle, and a virtual vehicle is assumed between the preceding vehicle and another vehicle when the other vehicle starts interrupting from the adjacent lane. Thus, the virtual vehicle is set as a target for follow-up travel. For this reason, in the vehicle control method according to the above aspect, the inter-vehicle distance and the relative speed are controlled with the virtual vehicle assumed between the preceding vehicle and the other vehicle when the interruption of the other vehicle starts. Deceleration or the like is performed with a time margin before interruption in front of the host vehicle.
従って、上記態様に係る車両制御方法では、追従走行中に自車両と先行車両との間に他車両が割り込んできた場合にあっても、滑らかな加減速での追従走行が可能である。 Therefore, in the vehicle control method according to the aspect described above, even when another vehicle is interrupted between the host vehicle and the preceding vehicle during the follow-up running, the follow-up running with smooth acceleration / deceleration is possible.
上記態様に係る車両制御方法において、前記車線検出ステップは、前記自車両に設けられた撮像部で当該自車両の周囲を撮像する撮像サブステップと、前記撮像サブステップで撮像した画像における、前記自車線および前記隣車線の両脇の区画線を基に、前記自車線および前記隣車線を検出する車線検出サブステップと、を有し、前記加減速制御ステップでは、前記他車両が前記自車線の両脇の前記区画線の内の前記隣車線側の前記区画線を跨いだ時点で、前記他車両が前記自車線に進入を開始したとの判断がなされる、とすることもできる。 In the vehicle control method according to the aspect described above, the lane detection step includes: an imaging substep in which an image capturing unit provided in the host vehicle captures an image of the surroundings of the host vehicle; and an image captured in the imaging substep. A lane detection sub-step for detecting the own lane and the adjacent lane based on lanes and lane markings on both sides of the adjacent lane, and in the acceleration / deceleration control step, the other vehicle It may be determined that the other vehicle has started entering the own lane at the time when it crosses the lane line on the adjacent lane side of the lane lines on both sides.
上記の車両制御方法では、撮像サブステップで撮像部が車線の両脇の区画線を撮像し、加減速制御ステップにおいて、撮像結果より、他車両が区画線を他車両が跨いだ時点を、他車両が自車線に進入を開始した時点とするので、仮想車両を想定する時点を早期に設定することができる。 In the vehicle control method described above, in the imaging sub-step, the imaging unit images the lane markings on both sides of the lane, and in the acceleration / deceleration control step, from the imaging result, the time when the other vehicle straddles the lane marking, Since the time when the vehicle starts entering the own lane is set, the time when the virtual vehicle is assumed can be set early.
上記態様に係る車両制御方法において、前記加減速制御ステップでは、前記追従走行が実行され、前記他車両が前記進入を開始した時点で、当該時点から所定期間の経過後における、前記先行車両および前記他車両の前記自車両に対する相対的な位置を推定し、当該推定した位置に基づいて前記仮想車両の想定がなされる、とすることもできる。 In the vehicle control method according to the above aspect, in the acceleration / deceleration control step, the following vehicle and the preceding vehicle after the elapse of a predetermined period from the time point when the follow-up traveling is executed and the other vehicle starts to enter. The relative position of the other vehicle with respect to the host vehicle may be estimated, and the virtual vehicle may be assumed based on the estimated position.
上記の車両制御方法では、加減速制御ステップにおいて、他車両が自車線への進入を開始した時点から、所定期間の経過後における先行車両および他車両の位置を推定した上で仮想車両を想定するので、他車両が実際に自車両と先行車両との間に割り込んだ場合と同様の状況を想定することができるので、より滑らかな加減速を以って追従走行が実行される。 In the vehicle control method described above, in the acceleration / deceleration control step, a virtual vehicle is assumed after estimating the positions of the preceding vehicle and the other vehicle after the lapse of a predetermined period from the time when the other vehicle starts entering the own lane. Therefore, it is possible to assume the same situation as when another vehicle actually interrupts between the host vehicle and the preceding vehicle, and the follow-up traveling is executed with smoother acceleration / deceleration.
上記の各態様では、追従走行中に自車両と先行車両との間に他車両が割り込んできた場合にあっても、滑らかな加減速での走行が可能である。 In each of the above aspects, even when another vehicle is interrupted between the host vehicle and the preceding vehicle during follow-up traveling, traveling with smooth acceleration / deceleration is possible.
以下では、本発明の実施形態について、図面を参酌しながら説明する。なお、以下で説明の形態は、本発明の一例であって、本発明は、その本質的な構成を除き何ら以下の形態に限定を受けるものではない。 Hereinafter, embodiments of the present invention will be described with reference to the drawings. In addition, the form demonstrated below is an example of this invention, Comprising: This invention is not limited to the following forms at all except the essential structure.
[実施形態]
1.車両1の概略構成
本実施形態に係る車両1の概略構成について、図1および図2を用いて説明する。
[Embodiment]
1. Schematic Configuration of Vehicle 1 A schematic configuration of the
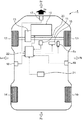
図1に示すように、車両1は、動力源としてのエンジン10を備える。本実施形態に係る車両1では、エンジン10の一例として、多気筒のガソリンエンジンを採用している。
As shown in FIG. 1, the
エンジン10には、変速機13が接続されており、当該変速機13から左右方向に向けて延びるようにドライブシャフト11が設けられている。ドライブシャフト13の端部には、左右の前輪12l,12rが取り付けられている。
A
なお、変速機13とドライブシャフト11との間には、図示を省略するデファレンシャルギヤが介挿されている。
A differential gear (not shown) is interposed between the
車両1の後方には、左右の後輪14l,14rが配置されている。左右の後輪14l,14rのそれぞれは、図示を省略するリヤアームに取り付けられている。
On the rear side of the
図1に示すように、車両1の車室内における運転席の足元部分には、アクセルペダル15とブレーキペダル16とが設けられている。アクセルペダル15は、運転者による踏込量に応じてエンジン10の回転数を増減し、運転者がブレーキペダル16を踏み込むことにより、前輪12l,12rおよび後輪14l,14rに取り付けられたブレーキが作動する。
As shown in FIG. 1, an
車両1には、3つのレーダ17,18,19と車室外カメラ20とが設けられている。3つのレーダ17,18,19の内、レーダ17は、車両1の前方部分に配置され、残りの2つのレーダ18,19は、車両1の側部に配置されている。これらレーダ17,18,19は、自車両(車両1)の周囲の車両の検出や、車両1と周囲の車両との相対速度および相対距離を検出する機能を有する。
The
車室外カメラ(撮像部)20についても、周囲の車両の検出や、相対速度および相対距離の検出、さらには、車両1が走行する車線(自車線)および隣接する車線(隣車線)を検出するために設けられている。
The vehicle outside camera (imaging unit) 20 also detects surrounding vehicles, detects relative speed and relative distance, and further detects the lane (own lane) in which the
なお、車室外カメラ20による自車線および隣車線の検出は、各車線の両脇の区画線を撮像することにより行われる。
In addition, the detection of the own lane and the adjacent lane by the
また、車両1には、地図情報格納部21が設けられている。地図情報格納部21は、車両1が走行する道路に関する情報などが格納されている。地図情報格納部21に格納された地図情報には、道路における車線情報も含まれている。
Further, the
さらに、車両1には、車両制御部であるコントロールユニット22も設けられている。図1および図2に示すように、コントロールユニット22は、CPU、ROM、RAMなどから構成されたマイクロプロセッサを有して構成されているとともに、レーダ17,18,19、車室外カメラ20、および地図情報格納部21などと接続されており、各種情報を受け付ける構成となっている。
Furthermore, the
また、コントロールユニット22には、追従走行指示受付部であるクルーズコントロールスイッチ29が接続されている。クルーズコントロールスイッチ29は、車両1の車室内における運転席の周囲に設けられており(図1では図示を省略)、ON状態とすることで先行車両に対する追従走行が開始される。
The
なお、図示や詳細な説明を省略するが、クルーズコントロールスイッチ29の周辺には、自車両の速度設定を行う速度設定部や、追従走行における先行車両との車間距離を設定する距離設定部や、追従走行の一時停止および設定の解除等を行う各設定部なども設けられている。 Although illustration and detailed explanation are omitted, in the vicinity of the cruise control switch 29, a speed setting unit for setting the speed of the host vehicle, a distance setting unit for setting the inter-vehicle distance with the preceding vehicle in the follow-up traveling, Each setting unit for temporarily stopping the follow-up running and canceling the setting is also provided.
さらに、コントロールユニット22は、エンジン10、アクセルペダル15、およびブレーキペダル16などに接続されており、上記各種情報を基にエンジン10の制御などを実行する。即ち、本実施形態に係る車両1では、受け付けた各種情報に基づいて、コントロールユニット22が車両制御の加減速制御を実行するように構成されている。
Further, the
なお、コントロールユニット22は、アクセルペダル15に対して運転者への反力に関する指令なども出力できるようになっている。同様に、コントロールユニット22は、運転者によるブレーキペダル16の踏み込みがない場合でも、必要に応じて各車輪12l,12r,14l,14rに設けられたブレーキを作動させるための指令を出力できるようになっている。
Note that the
2.レーダ17,18,19および車室外カメラ20による検出範囲
レーダ17,18,19および車室外カメラ20による検出範囲について、図3を用いて説明する。図3は、車両1を上方から平面した状態で、レーダ17,18,19および車室外カメラ20による検出範囲を示す模式図である。
2. Detection range by
図3に示すように、車両1の前部に設けられたレーダ17は、車両1の前方側の範囲θ17の車両等の検出が可能となっている。車両1の左部に設けられたレーダ18は、車両1の左方側の範囲θ18の車両等の検出が可能となっている。車両1の右部に設けられたレーダ19は、車両1の右方側の範囲θ19の車両等の検出が可能となっている。
As shown in FIG. 3, the
車室外カメラ20は、車両1のフロントウインドシールドの車室内側に設けられており、車両1の前方側の範囲θ20の車両等の検出が可能となっている。また、車室外カメラ20は、車両1が走行する車線や、隣接する車線などの検出も可能となっている。
The
車両1では、レーダ17,18,19および車室外カメラ20で検出された結果がコントロールユニット22に入力されるようになっており、コントロールユニット22は、これらの入力情報から、周囲を走行する車両と車両1との相対速度や相対距離などを算出できるようになっている。
In the
3.コントロールユニット22による加減速制御
車両1におけるコントロールユニット22が実行する加減速制御について、図4および図5を用いて説明する。図4(a)は、コントローユニット22における一部構成を示すブロック図であり、図4(b)は、加減速度決定部25の構成を示すブロック図であり、図5は、コントロールユニット22が実行する加減速制御方法を示すフローチャートである。
3. Acceleration / deceleration control by the
コントロールユニット22は、運転者によりクルーズコントロールスイッチ29がON状態にされると、先行車両が存在しない場合には設定された速度を維持するようにエンジン10などに指令を発し、先行車両が存在する場合には当該先行車両に追従するように速度制御を実行するようにエンジン10などに指令を発する。そして、図5に示すように、コントロールユニット22は、クルーズコントロールスイッチ29がON状態である場合に、レーダ17,18,19および車室外カメラ20から、自車線の前方を走行する先行車両の速度および相対距離に関する情報を逐次取得する(ステップS1)。
When the cruise control switch 29 is turned on by the driver, the
また、コントロールユニット22は、クルーズコントロールスイッチ29がON状態である場合に、レーダ17,18,19および車室外カメラ20から、隣車線における自車線の側方またはその前方を走行する対象車両(他車両)の速度および相対距離に関する情報も逐次取得する(ステップS2)。
When the cruise control switch 29 is in the ON state, the
ここで、図4(a)に示すように、コントロールユニット22は、加減速制御における制御目標を推定するための重み計算部23および制御目標統合部24と、加減速度を決定するための加減速度決定部25と、を有する。
Here, as shown in FIG. 4A, the
重み計算部23では、レーダ17,18,19および車室外カメラ20から入力された上記情報に基づき、次式を用いて重みri(t)を計算する(図5のステップS3)。
The

上記(数1)において、「ci」は、他車両による自車線への進入率を示し、「di」は、自車両と他車両との相対距離を示す。即ち、上記(数1)は、横方向の重み(進路への進入率)を縦方向の重み(距離の2乗)で除した値を重みri(t)と規定している。上記(数1)において、距離の2乗で除しているのは、人間が感じる危険感が距離の2乗に反比例するという法則によるものである。 In the above (Equation 1), “c i ” indicates the entry rate of the other vehicle into the own lane, and “d i ” indicates the relative distance between the own vehicle and the other vehicle. That is, the above (Expression 1) defines the weight r i (t) as a value obtained by dividing the horizontal weight (entrance rate to the course) by the vertical weight (distance squared). In the above (Equation 1), the division by the square of the distance is due to the law that the sense of danger felt by human beings is inversely proportional to the square of the distance.
なお、上記(数1)では、一例として、他車両が自車線に進入を開始した時点(割り込みを開始した時点)から2秒後の重みを予測している。 In the above (Equation 1), as an example, the weight after 2 seconds from the time when another vehicle starts entering the own lane (the time when the interruption is started) is predicted.
制御目標統合部25は、重み計算部23で計算された重みri(t)を受け付け、次式を用いて統合された制御目標(相対速度、相対距離)を計算する(図5のステップS4)。
The control
なお、上記(数2)において、「xi」は、先行車両および他車両を示す。 In the above (Equation 2), “x i ” indicates a preceding vehicle and another vehicle.
図4(b)に示すように、コントローユニット22では、加減速度決定部25が、制御目標統合部24で統合された制御目標(相対速度、相対距離)の入力を受け、相対速度ゲインを計算する部分26と、相対距離ゲインを計算する部分27と、それらの部分を計算されたゲインから時間遅れを計算する部分28と、を有する。
As shown in FIG. 4B, in the
図5に戻って、コントロールユニット22は、算出された制御目標からエンジン10などに加減速指令を発する(ステップS5)。
Returning to FIG. 5, the
4.追従走行中に割り込みがあった場合の制御の具体例
自車両が先行車両を追従して走行している場合に、割り込みがあった場合の制御の一例について、図6から図8を用いて説明する。図6(a)は、自車両VCと周辺車両x1、x2の所定時点での走行状態を示す模式図であり、図6(b)は、隣車線走行車両(他車両)x2が自車線Ln1に向けて車線変更し始めた時点での状態を示す模式図であり、図7は、コントロールユニット22が設定する仮想車両xVを説明するための模式図であり、図8は、隣車線走行車両x2が自車線Ln1に車線変更し終わった状態を示す模式図である。
4). Specific example of control when there is an interruption during follow-up driving An example of control when there is an interruption when the host vehicle is running following the preceding vehicle will be described with reference to FIGS. To do. FIG. 6A is a schematic diagram showing a traveling state of the host vehicle VC and the surrounding vehicles x 1 and x 2 at a predetermined point in time, and FIG. 6B shows that the adjacent lane traveling vehicle (other vehicle) x 2 is a schematic view showing a state at the time of starting to change lanes toward the own lane Ln1, FIG. 7 is a schematic diagram for explaining a virtual vehicle x V by the
(1)所定時点における自車両VCと周辺の車両x1,x2の走行状況
先ず、所定時点における自車両VCと周辺の車両x1,x2の走行状況について、図6(a)を用いて説明する。
(1) traveling condition of the
図6(a)に示すように、自車両VCは、進行方向に向かって左側の車線Ln1を走行中である。車線Ln1は、区画線L1と区画線L2とによって規定されている。なお、図6(a)に示すように、車線Ln1の幅は、自車両VCなどの車幅に比べて広い。 As shown in FIG. 6A, the host vehicle VC is traveling in the left lane Ln1 in the traveling direction. The lane Ln1 is defined by the lane marking L1 and the lane marking L2. In addition, as shown to Fig.6 (a), the width | variety of lane Ln1 is wide compared with vehicle widths, such as the own vehicle VC.
自車両VCは、自車線Ln1を速度v0で走行している。先行車両である前方走行車両x1は、車線Ln1を自車両VCに先行して走行している。前方走行車両x1の速度は、速度v1である。 Vehicle VC is running the same lane Ln1 at a speed v 0. Preceding forward traveling vehicle x 1 is a vehicle is traveling ahead of the lane Ln1 the vehicle VC. The speed of the forward traveling vehicle x 1 is the speed v 1.
なお、図6(a)に示すように、車線Ln1において、自車両VCと前方走行車両x1との間には、車両が割り込めるスペースが空いている。 Incidentally, as shown in FIG. 6 (a), in lane Ln1, between the vehicle VC and forward traveling vehicle x 1 is vacant vehicle barge space.
また、図6(a)に示す状況において、自車両VCは、前方走行車両x1に対して追従走行している。よって、自車両VCの速度v0と前方走行車両x1の速度v1とは、略同一の状態となっている。即ち、前方走行車両x1の速度v1は、自車両VCにおけるクルーズコントロールで設定された速度以下であって、且つ、自車両VCと前方走行車両x1との間の間隔は、自車両VCにおけるクルーズコントロールで設定された車間距離となっている。 Further, in the situation shown in FIG. 6 (a), the vehicle VC is in follow-up running with respect to the front running vehicle x 1. Accordingly, the velocity v 1 of the velocity v 0 and the forward traveling vehicle x 1 of the vehicle VC, are substantially the same state. That is, the speed v 1 of the forward traveling vehicle x 1 is equal to or lower than the speed set by the cruise control in the own vehicle VC, and the interval between the own vehicle VC and the forward traveling vehicle x 1 is the same as the own vehicle VC. It is the distance between cars set by the cruise control.
他車両である隣車線走行車両x2は、隣車線Ln2を自車両VCと同じ方向に向けて走行している。隣車線走行車両x2の速度は、速度v2である、なお、隣車線走行車両x2は、隣車線Ln2において、自車両VCの側方に対して若干前方の位置を走行している。 Adjacent lane vehicles x 2 is another vehicle has an adjacent lane Ln2 traveling towards the same direction as the host vehicle VC. The speed of the adjacent lane vehicles x 2 is the speed v 2, Note, the adjacent lane vehicles x 2, in the adjacent lane Ln2, running slightly forward position with respect to the side of the vehicle VC.
図6(a)に示すように、隣車線Ln2は、区画線L2と区画線L3とによって規定されており、隣車線Ln2の幅も、自車両VCや隣車線走行車両x2などの車幅に比べて広い。 As shown in FIG. 6 (a), the adjacent lane Ln2 is defined by the division line L3 and the section line L2, the width of the adjacent lane Ln2 also vehicle VC and the vehicle width of such adjacent lane vehicles x 2 Wide compared to.
(2)隣車線走行車両x2が自車線Ln1に進入し始めた時点での自車両VCと周辺の車両x1,x2の走行状況
次に、隣車線Ln2を走行していた隣車線走行車両x2が区画線L2を跨ぎ、自車線Ln1に進入し始めた時点での自車両VCと周辺の車両x1,x2の走行状況について、図6(b)を用いて説明する。
(2) Driving conditions of the host vehicle VC and the surrounding vehicles x 1 and x 2 when the adjacent lane traveling vehicle x 2 starts to enter the own lane Ln 1 Next, the adjacent lane traveling that was traveling in the adjacent lane Ln 2 A traveling situation of the host vehicle VC and the surrounding vehicles x 1 and x 2 at the time when the vehicle x 2 crosses the lane L2 and starts entering the own lane Ln1 will be described with reference to FIG.
図6(b)に示すように、自車両VCのコントロールユニット22は、車室外カメラ20により隣車線走行車両x2の少なくとも左前輪および左後輪(図6(b)では、左前輪だけ)が区画線L2を跨いだのを検出した時に、隣車線走行車両x2が自車線Ln1に対して進入し始めたと判断する。
As shown in FIG. 6 (b), the
自車両VCのコントロールユニット22は、隣車線走行車両x2が自車線Ln1に対して進入し始めたと判断した場合に、当該時点での自車両VCと前方走行車両x1との相対距離D1と、自車両VCと隣車線走行車両x2との相対距離D2と、に関する情報を取得する。また、コントロールユニット22は、隣車線走行車両x2が自車線Ln1に対して進入し始めた時点での、自車両VCの速度v0、前方走行車両x1の速度v1、および隣車線走行車両x2の速度v2に関する情報も取得し、相対速度(v1−v0)および相対速度(v2−v0)を算出する。
そして、コントロールユニット22は、上記(数1)に基づき、重みr1、r2を計算する。
Then, the
(3)仮想車両xVの設定と速度・車間距離の設定
次に、コントロールユニット22は、上記のように計算により求めた重みr1、r2より、制御目標となる仮想車両xVを自車線Ln1における自車両VCと前方走行車両x1との間に想定する。なお、仮想車両xVについては、速度vVで走行していると仮定される。
(3) Setting the speed and inter-vehicle distance of the virtual vehicle x V Next, the
コントロールユニット22は、上記のように想定された仮想車両xVに対して追従するように、エンジン10などの制御を開始する。
(4)車両x2が自車線Ln1における自車両VCと前方走行車両x1との間に完全に割り込んだ状態での自車両VCと周辺の車両x1,x2の走行状況
次に、車両x2が自車線Ln1における自車両VCと前方走行車両x1との間に完全に割り込んだ状態での自車両VCと周辺の車両x1,x2の走行状況について、図8を用いて説明する。
(4) Traveling situation of the host vehicle VC and the surrounding vehicles x 1 and x 2 in a state where the vehicle x 2 is completely interrupted between the host vehicle VC and the forward traveling vehicle x 1 in the host lane Ln1. for vehicle VC and the surrounding traveling conditions of the vehicle x 1, x 2 in the completely interrupting state between the vehicle VC and forward traveling vehicle x 1 x 2 is in the same lane Ln1, with reference to FIG. 8 described To do.
図8に示すように、車両x2が自車線Ln1における自車両VCと前方走行車両x1との間に完全に割り込んだ状態となった場合、コントロールユニット22は、追従走行のターゲットを仮想車両xVから車両x2へと変更する。
As shown in FIG. 8, when the vehicle x 2 becomes completely interrupting state between the vehicle VC and forward traveling vehicle x 1 in its own lane Ln1, the
例えば、割り込んだ車両x2の速度が速度v2であって、自車両VCと車両x2との車間距離が距離D3である場合には、相対速度(v2−v0)と車間距離D3とに基づいて、以降の追従走行制御がなされる。 For example, the speed of the vehicle x 2 where interrupting is a velocity v 2, when the inter-vehicle distance between the host vehicle VC and the vehicle x 2 is a distance D 3 is the inter-vehicle distance and relative speed (v 2 -v 0) Subsequent follow-up running control is performed based on D3.
なお、図7(b)に示した状況から、車両x2が自車線Ln1に割り込んでくることなく、隣車線Ln2に戻って走行するような場合には、再び前方走行車両x1を追従走行のターゲットとして速度・車間距離を制御することとなる。 Incidentally, from the situation shown in FIG. 7 (b), without the vehicle x 2 comes interrupts the own lane Ln1, in the case that travels back to the adjacent lane Ln2 is running track ahead traveling vehicle x 1 again As a target, speed and distance between vehicles will be controlled.
5.操作予測精度の確認
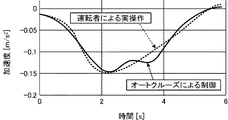
本実施形態に係る車両制御方法を採用した場合の操作予測精度の確認結果について、図9を用いて説明する。図9は、本実施形態に係る車両制御方法における操作予測精度の確認結果を示す特性図である。図9の特性図は、横軸に他車両が割り込みを開始した時点からの経過時間を、縦軸に加速度をとっている。
5. Confirmation of Operation Prediction Accuracy A confirmation result of operation prediction accuracy when the vehicle control method according to the present embodiment is adopted will be described with reference to FIG. FIG. 9 is a characteristic diagram showing a confirmation result of operation prediction accuracy in the vehicle control method according to the present embodiment. In the characteristic diagram of FIG. 9, the elapsed time from when the other vehicle started interrupting is plotted on the horizontal axis, and the acceleration is plotted on the vertical axis.
図9に示すように、実線で示した本実施形態に係るオートクルーズによる制御(追従走行制御)は、0秒(割り込み開始時点)から6秒後に至るまでの全領域において、加速度の推移が、点線で示した実操作での加速度と高い相関関係があることを示している。図9に示す特性図では、一例として相関値が0.98となっている。 As shown in FIG. 9, the control (following running control) by auto-cruising according to the present embodiment indicated by the solid line shows the change in acceleration in the entire region from 0 second (interrupt start time) to 6 seconds later. It shows that there is a high correlation with the acceleration in the actual operation indicated by the dotted line. In the characteristic diagram shown in FIG. 9, the correlation value is 0.98 as an example.
[変形例]
変形例に係る車両制御方法について、図10を用いて説明する。図10は、変形例に係る自車両VCと周辺の車両x1、x2、x3の所定時点での走行状態を示す模式図である。
[Modification]
A vehicle control method according to the modification will be described with reference to FIG. FIG. 10 is a schematic diagram illustrating a traveling state at a predetermined time of the host vehicle VC and the surrounding vehicles x 1 , x 2 , and x 3 according to the modification.
図10に示すように、本変形例に係る状況では、自車線Ln1を自車両VCと前方走行車両x1とが走行している。自車両VCと前方走行車両x1との車間距離は、距離D11であり、少なくとも2台の車両が割り込むことが可能な間隔が空いている。 As shown in FIG. 10, in the situation according to the present modification, the same lane Ln1 and vehicle VC and forward traveling vehicle x 1 is traveling. Inter-vehicle distance between the host vehicle VC and forward traveling vehicle x 1 is the distance D 11, and spaced capable to interrupt at least two vehicles.
自車両VCの速度は、速度v0であり、前方走行車両x1の速度は、速度v1である。 The speed of the host vehicle VC is the speed v 0 , and the speed of the forward traveling vehicle x 1 is the speed v 1 .
一方、自車線Ln1に隣接する隣車線Ln2を2台の隣車線走行車両x2,x3が走行している。車両x3は、車両x2に対して前方を走行している。そして、自車両VCに対する車両x2の相対距離は、距離D12であり、自車両VCに対する車両x3の相対距離は、距離D13である。
On the other hand, two adjacent lane traveling vehicles x 2 and x 3 are traveling along the
車両x2の速度は、速度v2であり、車両x3の速度は、速度v3である。 The speed of the vehicle x 2 is the speed v 2, the speed of the vehicle x 3 is the speed v 3.
図10に示すように、本変形例における現在の状況においては、車両x2と車両x3とが、ともに隣車線Ln2から自車線Ln1に対して車線変更しようとしてきており、区画線L2を跨いだ状態となっている。 As shown in FIG. 10, in the current situation in the present modification, the vehicle x 2 and the vehicle x 3 is, has been trying to change lanes together against the own lane Ln1 from the adjacent lane Ln2, the division line L2 It is in a straddling state.
本変形例に係る図10に示すような状況下において、自車両VCのコントロールユニット22は、上記(数1)に基づき、重みr1、r2、r3をそれぞれ計算する。そして、コントロールユニット22は、上記(数2)に基づき、重みr1、r2、r3を用いて制御目標(相対速度、相対距離)を計算する。即ち、コントロールユニット22は、上記実施形態と同様に、自車線Ln1における自車両VCと前方走行車両x1との間に仮想車両を想定し、当該想定した仮想車両をターゲットとして追従するようにエンジン10などに指令を発して加減速制御を行う。
Under the situation shown in FIG. 10 according to the present modification, the
[その他の変形例]
上記実施形態に係る車両1では、周辺車両の位置や速度や、車線などを検出するために、3つのレーダ17,18,19、車室外カメラ20、および地図情報格納部21を備えることとしたが、本発明は、これに限定を受けるものではない。例えば、レーザセンサや車−車間通信部などを備えることとしてもよい。これらのデバイスによっても周囲車両の位置や速度、あるいは車線を検出することができ、より高精度に追従制御を実行することができる。
[Other variations]
The
上記実施形態では、自車両VCRが走行する自車線Ln1と、当該自車線Ln1に隣接する隣車線Ln2と、の2車線における走行車両の車線変更推定を行うこととしたが、本発明は、これに限定を受けるものではない。例えば、自車線Ln1を挟んで隣車線Ln2とは反対側にも車線が存在するような状況においても、上記実施形態と同様に車線変更推定を行うことができる。この場合には、反対側の車線を走行する車両が自車線に割り込んでくる場合に対しても上記同様の制御を行うことができる。 In the above embodiment, the vehicle moving lane Ln1 which the vehicle VC R is traveling, the adjacent lane Ln2 adjacent to the own lane Ln1, the it is assumed that performing lane change estimation of the traveling vehicle in two lanes, the present invention is, This is not a limitation. For example, even in a situation where there is a lane on the opposite side of the adjacent lane Ln2 across the own lane Ln1, the lane change estimation can be performed as in the above embodiment. In this case, the same control as described above can be performed even when a vehicle traveling in the opposite lane enters the own lane.
さらに、自車線に対して両側に隣接する車線からそれぞれ車両が割り込んでくるような状況に対しても本発明を適用することが可能である。 Furthermore, the present invention can also be applied to a situation in which a vehicle enters from a lane adjacent to both sides of the own lane.
また、上記実施形態では、互いに並行した自車線Ln1と隣車線Ln2との間で車両が割り込んでくる場合を一例としたが、本発明は、これに限定を受けるものではない。例えば、高速道路や自動車専用道などの合流車線(加速車線)が本線に合流するような場所においても、適用が可能である。 Moreover, in the said embodiment, although the case where a vehicle interrupts between the own lane Ln1 and the adjacent lane Ln2 which were mutually parallel was taken as an example, this invention is not limited to this. For example, the present invention can also be applied in a place where a merging lane (acceleration lane) such as an expressway or an automobile exclusive road merges with the main line.
上記実施形態では、前方走行車両x1に対して追従走行している状態で他車両x2が割り込んでくる状況を一例としたが、本発明は、これに限定を受けるものではない。例えば、自車両が設定速度で走行している状態で他車両が割り込んでくるような状況でも、本発明は適用可能である。 In the above embodiment, as an example a situation coming interrupting other vehicle x 2 in a state that the follow-up run with respect to the front running vehicle x 1, the present invention is not intended to be limited thereto. For example, the present invention can be applied even in a situation in which another vehicle interrupts while the host vehicle is traveling at a set speed.
上記実施形態では、コントロールユニット22による重みriの計算において、上記(数1)のように2秒後の重みを計算することとしたが、本発明は、これに限定を受けるものではない。例えば、1秒未満の時間を設定することもできるし、2秒よりも大きい時間を設定することもできる。これらは、各車両における走行環境などを考慮して設定されればよい。
In the above embodiment, in the calculation of the weight r i by the
上記実施形態では、車両1の動力源の一例としてエンジン10を採用したが、本発明は、これに限定を受けるものではない。例えば、電動モータを動力源としてもよいし、エンジンと電動モータとを併用した形態とすることもできる。また、レンジエクステンダ型の電気自動車等とすることもできる。
In the above-described embodiment, the
また、上記実施形態では、フロントエンジン・フロント駆動の車両1を一例として採用することとしたが、本発明は、これに限定を受けるものではない。例えば、フロントエンジン・リヤ駆動の車両、四輪駆動車、あるいはリヤエンジン・リヤ駆動の車両などを採用することも可能である。
In the above embodiment, the front engine /
1 車両
10 エンジン(駆動源)
17〜19 レーダ
20 車室外カメラ
21 地図情報格納部
22 コントロールユニット(車両制御部)
29 クルーズコントロールスイッチ(追従走行指示受付部)
VC 自車両
x1 前方走行車両(先行車両)
x2,x3 隣車線走行車両(他車両)
Ln1 自車線
Ln2 隣車線
1
17-19
29 Cruise Control Switch (Following Running Instruction Accepting Section)
VC own vehicle x 1 forward traveling vehicle (preceding vehicle)
x 2 , x 3 adjacent lane traveling vehicle (other vehicle)
Ln1 own lane Ln2 next lane
Claims (7)
自車両が走行する自車線と、当該自車線に対して隣接する隣車線と、を検出する車線検出部と、
前記自車線における前記自車両の前方を走行する前記先行車両と、前記隣車線を走行し、前記自車両の側方またはその前後を走行する他車両と、のそれぞれの速度および相互間での距離を検出する速度・距離検出部と、
前記自車両の運転者からの、追従走行の実行指示を受け付ける追従走行指示受付部と、
前記車線検出部および前記速度・距離検出部からの検出結果と、前記追従走行指示受付部からの受付結果と、に基づき、前記自車両の加減速制御を実行する車両制御部と、
を備え、
前記車両制御部は、
前記先行車両に対して前記追従走行が実行されている場合であって、前記他車両が前記自車線における前記先行車両と前記自車両との間に進入を開始した場合に、前記自車両と前記先行車両との相対速度および相対距離と、前記自車両と前記他車両との相対速度および相対距離と、に基づいて、前記自車両と前記先行車両との間に仮想的な車両である仮想車両を想定し、
前記仮想車両に対して追従走行するように加減速制御を実行する、
車両制御装置。 A vehicle control device that executes control of a vehicle having a follow-up running function of running following a preceding vehicle,
A lane detector for detecting the own lane in which the host vehicle is traveling and the adjacent lane adjacent to the own lane;
The speed and distance between the preceding vehicle that travels in front of the host vehicle in the host lane and the other vehicle that travels on the side of the host vehicle or in front of or behind the host vehicle. A speed / distance detector for detecting
A follow-up travel instruction receiving unit that receives an execution instruction of follow-up travel from the driver of the vehicle,
A vehicle control unit that executes acceleration / deceleration control of the host vehicle based on a detection result from the lane detection unit and the speed / distance detection unit and a reception result from the follow-up travel instruction reception unit;
With
The vehicle control unit
When the follow-up traveling is being performed on the preceding vehicle, and the other vehicle starts entering between the preceding vehicle and the own vehicle in the own lane, the own vehicle and the A virtual vehicle that is a virtual vehicle between the host vehicle and the preceding vehicle based on the relative speed and relative distance with the preceding vehicle and the relative speed and relative distance between the host vehicle and the other vehicle. Assuming
Acceleration / deceleration control is executed so as to follow the virtual vehicle.
Vehicle control device.
前記車線検出部は、撮像部を含み、当該撮像部が撮像した前記自車線および前記隣車線の両脇の区画線を基に、前記自車線および前記隣車線を検出し、
前記車両制御部は、前記他車両が前記自車線の両脇の前記区画線の内の前記隣車線側の前記区画線を跨いだ時点で、前記他車両が前記自車線に進入を開始したと判断する、
車両制御装置。 The vehicle control device according to claim 1,
The lane detection unit includes an imaging unit, detects the own lane and the adjacent lane based on the lanes on both sides of the own lane and the adjacent lane captured by the imaging unit,
When the other vehicle has crossed the lane marking on the adjacent lane side of the lane marking on both sides of the lane, the other vehicle has started entering the lane. to decide,
Vehicle control device.
前記自車線の幅は、前記自車両の車幅よりも広い、
車両制御装置。 The vehicle control device according to claim 2,
The width of the own lane is wider than the width of the own vehicle.
Vehicle control device.
前記車両制御部は、前記追従走行が実行され、前記他車両が前記進入を開始した時点で、当該時点から所定期間の経過後における、前記先行車両および前記他車両の前記自車両に対する相対的な位置を推定し、当該推定した位置に基づいて前記仮想車両を想定する、
車両制御装置。 In the vehicle control device according to any one of claims 1 to 3,
The vehicle control unit is configured such that when the follow-up travel is executed and the other vehicle starts to enter, the preceding vehicle and the other vehicle relative to the host vehicle after a predetermined period has elapsed from the time point. Estimating a position and assuming the virtual vehicle based on the estimated position;
Vehicle control device.
自車両が走行する自車線と、当該自車線に対して隣接する隣車線と、を検出する車線検出ステップと、
前記自車線における前記自車両の前方を走行する前記先行車両と、前記隣車線を走行し、前記自車両の側方またはその前後を走行する他車両と、のそれぞれの速度および相互間での距離を検出する速度・距離検出ステップと、
前記自車両の運転者からの、追従走行の実行指示を受け付ける追従走行指示受付ステップと、
前記車線検出ステップおよび前記速度・距離検出ステップで検出された結果と、前記追従走行指示受付ステップでの受付結果と、に基づき、前記自車両の加減速制御を実行する車両制御ステップと、
を備え、
前記車両制御ステップは、前記先行車両に対して前記追従走行が実行されており、前記他車両が前記自車線における前記先行車両と前記自車両との間に進入を開始した場合に、前記自車両と前記先行車両との相対速度および相対距離と、前記自車両と前記他車両との相対速度および相対距離と、に基づいて、前記自車両と前記先行車両との間に仮想的な車両である仮想車両を想定する想定サブステップと、
前記仮想車両に対して追従走行するように加減速制御を実行する加減速制御サブステップと、
を有する、
車両制御方法。 A vehicle control method for controlling a vehicle having a follow-up running function of running following a preceding vehicle,
A lane detection step for detecting the own lane in which the host vehicle is traveling and the adjacent lane adjacent to the own lane;
The speed and distance between the preceding vehicle that travels in front of the host vehicle in the host lane and the other vehicle that travels on the side of the host vehicle or in front of or behind the host vehicle. Speed / distance detection step for detecting
A follow-up running instruction receiving step for receiving an execution instruction for follow-up running from the driver of the host vehicle;
A vehicle control step for executing acceleration / deceleration control of the host vehicle based on the result detected in the lane detection step and the speed / distance detection step and the reception result in the follow-up travel instruction reception step;
With
In the vehicle control step, when the follow-up traveling is executed with respect to the preceding vehicle and the other vehicle starts to enter between the preceding vehicle and the own vehicle in the own lane, the own vehicle And the preceding vehicle based on the relative speed and relative distance between the host vehicle and the preceding vehicle, and the relative speed and relative distance between the host vehicle and the other vehicle. An assumed substep assuming a virtual vehicle;
An acceleration / deceleration control sub-step for executing acceleration / deceleration control so as to follow the virtual vehicle;
Having
Vehicle control method.
前記車線検出ステップは、
前記自車両に設けられた撮像部で当該自車両の周囲を撮像する撮像サブステップと、
前記撮像サブステップで撮像した画像における、前記自車線および前記隣車線の両脇の区画線を基に、前記自車線および前記隣車線を検出する車線検出サブステップと、
を有し、
前記加減速制御ステップでは、前記他車両が前記自車線の両脇の前記区画線の内の前記隣車線側の前記区画線を跨いだ時点で、前記他車両が前記自車線に進入を開始したとの判断がなされる、
車両制御方法。 The vehicle control method according to claim 5,
The lane detection step includes
An imaging sub-step of imaging the surroundings of the host vehicle with an imaging unit provided in the host vehicle;
A lane detection substep for detecting the own lane and the adjacent lane based on the lane markings on both sides of the own lane and the adjacent lane in the image captured in the imaging substep;
Have
In the acceleration / deceleration control step, the other vehicle starts to enter the own lane when the other vehicle crosses the lane marking on the adjacent lane side of the lane marking on both sides of the own lane. Judgment is made,
Vehicle control method.
前記加減速制御ステップでは、前記追従走行が実行され、前記他車両が前記進入を開始した時点で、当該時点から所定期間の経過後における、前記先行車両および前記他車両の前記自車両に対する相対的な位置を推定し、当該推定した位置に基づいて前記仮想車両の想定がなされる、
車両制御方法。 In the vehicle control method according to claim 5 or 6,
In the acceleration / deceleration control step, when the follow-up traveling is executed and the other vehicle starts to enter, the preceding vehicle and the other vehicle relative to the host vehicle after a lapse of a predetermined period from the time point. A virtual position is estimated, and the virtual vehicle is assumed based on the estimated position.
Vehicle control method.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018104311A JP2019209701A (en) | 2018-05-31 | 2018-05-31 | Vehicle control device and vehicle control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018104311A JP2019209701A (en) | 2018-05-31 | 2018-05-31 | Vehicle control device and vehicle control method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019209701A true JP2019209701A (en) | 2019-12-12 |
Family
ID=68845734
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018104311A Pending JP2019209701A (en) | 2018-05-31 | 2018-05-31 | Vehicle control device and vehicle control method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019209701A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113415274A (en) * | 2021-07-14 | 2021-09-21 | 重庆长安汽车股份有限公司 | Automatic driving following track planning system, method, vehicle and storage medium |
| JP2021160627A (en) * | 2020-04-01 | 2021-10-11 | マツダ株式会社 | Driver state detection device |
| JP2022104120A (en) * | 2020-12-28 | 2022-07-08 | 本田技研工業株式会社 | Vehicle control system and road shoulder entry determination method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015225546A (en) * | 2014-05-28 | 2015-12-14 | 本田技研工業株式会社 | Object detection device, drive support apparatus, object detection method, and object detection program |
| WO2017022447A1 (en) * | 2015-08-06 | 2017-02-09 | 本田技研工業株式会社 | Vehicle control device, vehicle control method and vehicle control program |
| JP2017136897A (en) * | 2016-02-02 | 2017-08-10 | トヨタ自動車株式会社 | Vehicle travel control device |
-
2018
- 2018-05-31 JP JP2018104311A patent/JP2019209701A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015225546A (en) * | 2014-05-28 | 2015-12-14 | 本田技研工業株式会社 | Object detection device, drive support apparatus, object detection method, and object detection program |
| WO2017022447A1 (en) * | 2015-08-06 | 2017-02-09 | 本田技研工業株式会社 | Vehicle control device, vehicle control method and vehicle control program |
| JP2017136897A (en) * | 2016-02-02 | 2017-08-10 | トヨタ自動車株式会社 | Vehicle travel control device |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021160627A (en) * | 2020-04-01 | 2021-10-11 | マツダ株式会社 | Driver state detection device |
| JP7483207B2 (en) | 2020-04-01 | 2024-05-15 | マツダ株式会社 | Driver status detection device |
| JP2022104120A (en) * | 2020-12-28 | 2022-07-08 | 本田技研工業株式会社 | Vehicle control system and road shoulder entry determination method |
| CN113415274A (en) * | 2021-07-14 | 2021-09-21 | 重庆长安汽车股份有限公司 | Automatic driving following track planning system, method, vehicle and storage medium |
| CN113415274B (en) * | 2021-07-14 | 2022-07-05 | 重庆长安汽车股份有限公司 | Automatic driving following track planning system, method, vehicle and storage medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3932806B2 (en) | Driving control device for automobile | |
| JP7151179B2 (en) | Lane change estimation device and lane change estimation method, vehicle control device and vehicle control method | |
| US10754347B2 (en) | Vehicle control device | |
| US10077050B2 (en) | Automated driving system for evaluating lane cut-out and method of using the same | |
| JP3167987B2 (en) | Curve approach control device | |
| US20160297447A1 (en) | Travel Control Device and Travel Control Method | |
| JP6319192B2 (en) | Vehicle speed limiter | |
| CN112384419B (en) | Vehicle driving support control device, vehicle driving support system, and vehicle driving support control method | |
| JP6729326B2 (en) | Automatic driving device | |
| JP2006347252A (en) | Travel safety device for vehicle | |
| JP2005231382A (en) | Vehicular running control device | |
| JP4635721B2 (en) | Auto cruise equipment for vehicles | |
| KR102429495B1 (en) | Apparatus and method for controlling creep torque of eco vehicle | |
| JP4277907B2 (en) | Driving control device for automobile | |
| JP2010137803A (en) | Vehicular drive assistance system | |
| US20160293010A1 (en) | Collision-avoidance support device | |
| JP2019209701A (en) | Vehicle control device and vehicle control method | |
| JP2019172166A (en) | Automatic driving system and automatic driving program | |
| JPWO2019142312A1 (en) | Vehicle control device, vehicle with it, and control method | |
| JP5075656B2 (en) | Object detection device | |
| JP3602337B2 (en) | Vehicle travel control device | |
| JP2019038363A (en) | Vehicular travelling control device | |
| JP5018925B2 (en) | Auto cruise equipment for vehicles | |
| JP6637474B2 (en) | Travel control device, travel control method, and vehicle | |
| JP7351076B2 (en) | Electric vehicle control method and electric vehicle control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220107 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220517 |