JP2019166340A - 気管内挿管装置 - Google Patents
気管内挿管装置 Download PDFInfo
- Publication number
- JP2019166340A JP2019166340A JP2019094259A JP2019094259A JP2019166340A JP 2019166340 A JP2019166340 A JP 2019166340A JP 2019094259 A JP2019094259 A JP 2019094259A JP 2019094259 A JP2019094259 A JP 2019094259A JP 2019166340 A JP2019166340 A JP 2019166340A
- Authority
- JP
- Japan
- Prior art keywords
- control
- shaft
- distal end
- cable
- disk
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/267—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the respiratory tract, e.g. laryngoscopes, bronchoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00045—Display arrangement
- A61B1/00052—Display arrangement positioned at proximal end of the endoscope body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00082—Balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00135—Oversleeves mounted on the endoscope prior to insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0052—Constructional details of control elements, e.g. handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M16/00—Devices for influencing the respiratory system of patients by gas treatment, e.g. ventilators; Tracheal tubes
- A61M16/04—Tracheal tubes
- A61M16/0488—Mouthpieces; Means for guiding, securing or introducing the tubes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M16/00—Devices for influencing the respiratory system of patients by gas treatment, e.g. ventilators; Tracheal tubes
- A61M16/04—Tracheal tubes
- A61M16/0402—Special features for tracheal tubes not otherwise provided for
- A61M16/0418—Special features for tracheal tubes not otherwise provided for with integrated means for changing the degree of curvature, e.g. for easy intubation
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Optics & Photonics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Pulmonology (AREA)
- Otolaryngology (AREA)
- Emergency Medicine (AREA)
- Anesthesiology (AREA)
- Hematology (AREA)
- Physiology (AREA)
- Endoscopes (AREA)
Abstract
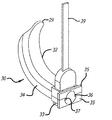
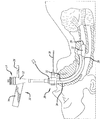
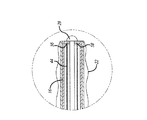
【課題】シャフトの操縦可能な遠位端をいくつかの異なる角度位置に動かすことができるようにする操縦能力を有する気管内挿管装置を提供する。【解決手段】装置は、可撓性又は展性シャフト18の遠位端16をいくつかの異なる角度位置に操縦するために手で操作することができる操縦制御機構14を収容する外ケーシング12を含む。操縦可能な遠位端は、達成可能な異なる角度位置の数を最大にするそのニュートラル位置にある(遠位端が実質的に直線である)状態で示される。遠位端によって達成することができる多くの角度位置のうちのほんのいくつかが点線によって表される。【選択図】図1
Description
関連出願への相互参照
本願は、2013年3月15日に出願された米国特許仮出願第61/791,596号の37CFR§119(e)に基づく利益を主張するものであり、その内容は、引用によりそれらの全体が本明細書に組み込まれる。
本願は、2013年3月15日に出願された米国特許仮出願第61/791,596号の37CFR§119(e)に基づく利益を主張するものであり、その内容は、引用によりそれらの全体が本明細書に組み込まれる。
本発明は、一般に、内視鏡装置に関し、より詳細には、装置を正常な及び病的な患者の解剖学的構造を通して誘導するのを助けるために装置のシャフトの操縦可能な遠位端をいくつかの異なる角度位置に動かすことができるようにする操縦能力を有する気管内挿管装置に関する。使用時に、気管内チューブは、気管内チューブの遠位端を気管に適正に挿入することができるように、気管内装置のシャフトの上に同軸に配置される。現在の装置のシャフトは、異なる剛性、すなわち、従来の内視鏡(大腸内視鏡、気管支鏡など)のように可撓性であるか、又は展性、すなわち、曲げられるとその形状を保持することができるかのいずれかである場合がある。他の器官(結腸、尿管など)とは異なり、中咽頭は、内視鏡を通すことができるぴったり合う導管を提供しない。本明細書で説明される内視鏡の可撓性の実施形態は、この内視鏡が、これに気管内チューブが設置された状態で、咽頭後隙に通されることを可能にする固有の予め形成された導管と共に用いることができる。シャフトの操縦可能な遠位端は、気管内チューブを気管に入れるべく操縦することができる。本発明はまた、気管挿管を行うための方法に向けられる。
医学的な緊急事態、外傷に際して、及び手術のための全身麻酔の一部として、呼吸管が患者の気道に入れられる。普通は挿管と呼ばれる気管内挿管は、開いた気道を維持し、酸素及び麻酔薬ガスを含む特定のガスを肺に直接投与するための導管として役立つように可撓性プラスチックチューブ、気管内チューブ、又はETTを患者の気管(trachea)(windpipeとも呼ぶ)に入れることである。これは、機械的換気を含む肺の換気を容易にし、窒息又は気道閉塞が起こるのを防ぐために、重病の患者、負傷した患者、又は麻酔された患者によく行われる。
ヒトの解剖学的構造は、舌を越えた気道を肉眼で見ることを可能にしない。口又は鼻に盲目的に通されたチューブは、おそらく結局は肺につながる気管にではなく胃につながる食道に入る。この手技を直接視下で行うための種々のツールが存在し、これは、普通は、高度な訓練を受けた医療専門家によって病院又はプレホスピタル環境で行われる。上記の解剖学的理由で、すなわち口の外から気管への直接の視線が存在しなので、挿管は、舌が後退させられ、気道構造体が直接視下で識別されることを可能にする1つのタイプ又は別のタイプの観察器具の使用を含む。現代の従来の喉頭鏡は、ほとんどの場合、挿管のために用いられ、目標部位、すなわち、気管への入り口である声帯が見えるようにするべくライトに電力を与えるバッテリを収容するハンドルと、直線であるか又は湾曲している一組の交換可能なブレードからなる。患者が仰向け(背臥位)になり、医師が患者の頭の後ろにいる状態で、喉頭鏡は、最初に患者の口腔に挿入される。喉頭鏡ブレードは、気道を確実に識別することができるように舌及び他の内部構造体を邪魔にならない所に制御する及び移動させるように設計される。患者の声帯は、気管(windpipe)(trachea)及び肺への入口点であり、呼吸管(気管内チューブと呼ばれる)がそれを通して前進させられる目標地点を表す。気管内チューブは、基本的に、気道を開いた遮られていない状態にし、この状態を維持する主目的で気管に挿入される可撓性カテーテルである。上記のように、気管内チューブは、全身麻酔、救命救急、機械的換気、及び外傷の状況での気道管理のために用いられる。
従来の挿管は、患者の声帯を識別することができるように患者の舌を邪魔にならない所に移動させるために、器具、普通は喉頭鏡を患者の口腔に導入することで始まる。実際には、しかしながら、患者に解剖学的奇形及び物理的バリエーションが存在する場合があり、これはしばしば声帯の直視を容易に可能にしない。これは異なる器具を用いる複数の試みにつながる。重病の患者又は麻酔された患者の気道確保の失敗は、低酸素症(酸素の欠乏)、脳の損傷、又はさらには5分での死亡につながる場合がある。
従来の挿管スタイレットは、気管内チューブ及び喉頭鏡と併せて用いることができ、浅い「C」形状に製造される気管内チューブが個々の患者の解剖学的構造に良好に適合し、これにより、気管への気管内チューブの操縦が容易になるように、気管内チューブの内腔に挿入されるように設計される。この従来のスタイレットは、よく使われており、銅又はアルミニウムなどの展性金属ワイヤから作製することができ、これは医師がスタイレットに、したがって覆い被さる気管内チューブに所望の屈曲又は形状、例えばきつい「C」形状又は急角度の形状又は「アイスホッケー用スティック」形状をつけることを可能にする。スタイレットは、通常、医師が難しい挿管を予想するときに用いられる。
挿管手技中に、医師は、普通は、気管内チューブ及び用いられる場合にはスタイレットを他方の手で持ちながら、一方の手に喉頭鏡を持つ。喉頭鏡は、舌及び喉頭蓋を含む他の内部構造体を後退させるのに用いられ、声帯の直視につながる。声帯が確実に識別されると、医師は、気管内チューブの遠位端が声帯を通して気管に優しく挿入されるように気管内チューブ/スタイレット組立体を前進させる。次いで、気管内チューブを気管内に残してスタイレットが取り出され、肺の換気を確保することができる。
上述のように直接視下での声帯の識別が普通の手順であるが、患者の体表解剖学的構造の目視検査で明らかではない内部の解剖学的閉塞又は病理学的閉塞が存在する場合がある。挿管の複数の試みは、結果的に歯、喉頭蓋、及び声帯を損傷させる場合がある。気道をあまり視覚化することができない状態で出血が生じる場合があり、時には気道を閉塞させ、低酸素症につながる場合がある。
気管内チューブは、酸素などの加圧ガスの源に接続されるように設計される近位フィッティング、すなわちTピースを有する。気管内チューブは、気管内チューブが気管内に適正に位置決めされると膨らませられる可膨張性バルーン(カフと呼ばれる)をその遠位端に含む場合がある。気管内チューブの遠位先端部は、両肺が等しく換気できるように竜骨の上に(気管が各肺に分かれる前に)位置決めされるべきである。気管内チューブが気管に挿入された後で、気道をシールし、酸素及び他のガスが肺に送り込まれることを可能にするために、バルーンカフが膨らませられる。この膨らんだバルーンは、肺からの呼吸ガスの逆行性の漏れを防ぐだけでなく、胃酸又は胃分泌物などの望ましくない物質が順行して肺に入ることから気管気管支樹を保護する。次いで、気管内チューブの近位端を患者の顔の口の近くに固定し、Tピース、麻酔呼吸回路、バッグバルブマスク装置、又は人工呼吸器に接続することができる。定位置にくると、気管内チューブは、酸素と二酸化炭素の適切な交換、空気中で見られるよりも高濃度での酸素の送達、若しくは麻酔薬ガス、ヘリウム、一酸化窒素、又はキセノンなどの他のガスの投与を確実なものにするために用いられる。
これは侵襲的で極めて不快な手技であるため、挿管は全身麻酔の誘導後に最もよく行われる。さらに、頭及び首の筋を弛緩させ、挿管を容易にするために、神経筋遮断(麻痺)薬が普通は投与される。しかしながら、これは、患者がこのとき自発的に呼吸する能力を失ったことを意味し、したがって、医師によって換気が支援されなければならない。この時点で、挿管できない又は肺の換気を提供できないことは、重大な結末につながることがあり、麻酔科医に対する医療過誤の損害賠償請求の主な原因である。
上述のように、難しい気管挿管は、様々な深刻さの合併症に関連することがある。歯の損傷又は上気道の組織の裂傷が存在する場合がある。これはまた、胃内容物の誤嚥などの潜在的に致命的な合併症に関連することがあり、これは結果的に深刻な、時には致命的な化学性肺臓炎を生じることがある。気管ではなく胃の無益な換気につながる未認識の食道の挿管は、致命的な酸素欠乏症につながることがある。このため、異常な気道の解剖学的構造又は他の制御されない変数の存在に起因する難しさ又は合併症の可能性が、気管挿管を行う前に注意深く評価される。しかしながら、正常な体表解剖学的構造は、好ましい内部の解剖学的構造及び容易な挿管を保障するものではなく、ゆえに気道を確保するための代替的な戦略が常に容易に利用可能でなければならない。
直接喉頭鏡を用いる気管内挿管は、普通は、訓練された人によって比較的容易に行われる手技である。しかしながら、難しいケースは、時には、挿管のための代替的な方法を提供するために特別に作製された装置を必要とする。一部の喉頭鏡は、特別に形状設定されたブレードと、直視が可能ではない場合の間接視のためのファイバ光学系又はビデオ光学系の使用を特徴とする。光ファイバ喉頭鏡は、ますます入手しやすくなっており、1990年代から一般に用いられている。直接の視線のみを与える従来の喉頭鏡とは対照的に、これらの装置は、医師が「角を曲がった先を見る」こと、喉頭を間接的に見ることを可能にする。これは、医師が喉頭の直接視界を得ることができず、例えば大きい舌、短い下顎、小さい口、又は出っ歯によって生じる気道の急な屈曲部の先を見る必要がある状況で顕著な利点を提供する場合がある。ビデオ喉頭鏡は、操作者がビデオモニタ上で声門及び喉頭を見ることを可能にするデジタルビデオカメラセンサを用いる特化された光ファイバ喉頭鏡である。
スタイレットなどの従来の挿管装置に関連する問題のうちの1つは、スタイレットが医師によって一旦予め形状設定されると、スタイレットは、患者の口腔内に入れられている間、さらに曲げることができないことを含む。スタイレットにつけられた最初の形状が、気管内チューブが気管の中に適正に操作されることを可能にしない場合、医師は、患者の咽頭からスタイレット(及び設置された気管内チューブ)を取り出し、スタイレット/気管内チューブ組立体をより好ましい形状に再び曲げ、次いで、組立体を患者の咽頭に戻して再導入しなければならない。これらのステップは、スタイレットが適正な構成に曲げられていない場合に、再び繰り返されなければならないことがある。また、医師は、スタイレットが再び形状設定されなければならないときに患者の口腔から喉頭鏡を引き出し、次いで、喉頭鏡に続いて、新たに成形されたスタイレット及び気管内チューブを患者の口腔に再び挿入する必要がある。したがって、現在の従来の医療装置は、患者に挿管するのに必要な時間を増加させることがあり、患者に適正に挿管するのに医師にかなりの努力をさせることがある。したがって、信頼性が高く、比較的使用が容易で、声帯の視覚化と気管内チューブの位置決めを同期することができる、医師及び臨床家によって用いられる挿管装置が引き続き必要とされている。本発明はこれらの及び他の必要を満たすものである。
本発明は、装置をその設置された気管内チューブと共に所望の目標位置に操縦するために装置のシャフトの遠位端が制限のない数の異なる角度位置に動かされることを可能にする操縦能力を有する気管内挿管装置に向けられる。本発明に従って作製される気管内装置は、それを通す導管を必要とする従来の内視鏡のように可撓性材料から作製されるか又は目標位置への操縦可能な遠位先端部のより容易な位置決めを可能にするためにシャフトが所望の構成に予め形成されることを可能にする展性材料を組み込む様々な剛性のシャフトを使用する。シャフトが近位に可撓性であるか又は展性である状態での、シャフトの操縦可能な遠位先端部は、極めて変形可能であり、装置の近位端に存在する本明細書で説明される単純な操縦機構を操作することによってその角度位置を変えることができる。シャフトが展性シャフトであるか又は予め形成された導管を介する構成にあれば、遠位先端部を目標位置に誘導するために最遠位の先端部の角度位置を変えることができる。従来の内視鏡のように装置の遠位端に視覚化要素及び照明要素を組み込むことができる。気管挿管に関して、気管内チューブは、これらの要素を用いて識別される声帯と同軸に設置され、チューブは、その通過中に遮られない視覚化により気管の中に位置決めされる。
本発明の気管内装置は、シャフトの可撓性遠位先端部を視覚化し、気管開口部付近に配置するために、気管内挿管装置の可撓性に構成された実施形態が通ることができる導管を形成する新規な舌リトラクタ装置と併せて用いることができる。本発明は、内視鏡の位置決めを助けるべく患者の舌を邪魔にならない所に後退させることによって従来の喉頭鏡のブレードと若干似たように作用する。リトラクタによって形成された導管は、患者の口腔への可撓性に構成されたシャフト及び設置された気管内チューブの容易な通過を提供する。舌リトラクタは、医師がこれを患者の口腔内に入れることを可能にするこれに取り付けられるハンドルを含む。ハンドルは、導管の遠位端が舌を越え、咽頭後部の中で、喉頭の近くにくるように医師が必要に応じて舌を移動させることを可能にする。その後、内視鏡と覆い被さる気管内チューブが声帯を通して気管の中に操縦される。ハンドルは、リトラクタブレードを患者の口腔から取り出す必要なく酸素マスクを患者の口の上にぴったりと取り付けるために、必要であれば医師がハンドルを取り外すことを可能にするべく、リトラクタブレードに取り外し可能に取り付けることができる。リトラクタは、したがって、肺のバッグ及びマスク換気を可能にする気道として機能する。
本発明は、直接視覚化又は間接視覚化を用いる喉頭鏡と共に用いることもできる操縦可能な遠位端を有する、視覚化能力のない、独立した展性スタイレットとして作製することができる。この実施形態では、声帯が見えるようにするために別個のモニタと共に従来の直接喉頭鏡検査法又は間接光ファイバ内視鏡検査が用いられる。独立したスタイレットは、次いで、遠位先端部の微調整を提供し、覆い被さる気管内チューブを声帯を通して操縦するために、これらの視覚化モードのうちのいずれかと併せて用いられる。(直接又は間接喉頭鏡検査法では、気管内チューブ自体が声帯のビューを妨げる可能性が常にあるが、ここで説明される内視鏡検査は、視覚化要素がチューブ自体の内部にあるのでビューが妨げられないことに留意されたい)。本発明の気管内装置は、密閉することで、装置の要素に支障を来さずに装置を滅菌溶液に浸すことができるようにする。本発明の舌リトラクタは、再滅菌する又は廃棄することができる。
装置の内視鏡バージョンは、独立したスタイレットバージョンとは異なり、視覚化機能を組み込んでおり、しっかりとしたグリップを得るために、手のひら、3本の指、及び親指の水かきによって包まれるハンドルを含む。次いで、親指及び人差し指の先を使って、医師は、操縦制御機構を手で操作し、シャフトの操縦可能な遠位端を気管の開口部と位置合わせされた状態の角度位置に動かすことができる。気管内チューブの遠位端が気管に入れられた後で、内視鏡器具が他方の手で患者の口腔から取り出される間、気管内チューブの遠位端は一方の手で定位置に保持される。次いで、気管内チューブのバルーンカフを膨らませることができ、患者の肺の換気を始めることができる。
上述のように、本発明は、医師がシャフトを所望の構成に予め曲げることを可能にする展性シャフトを使用する場合がある。この実施形態は、患者の様々な解剖学的特徴の周りに延びることになる構成を達成するために医師が必要に応じてシャフトを形状設定することを可能にし、遠位端が気管の開口部の近くに配置されることを可能にする。操縦可能な遠位端が気管開口部の「許容範囲内(in the ballpark)」に入れられると、医師は、声帯を識別するために視覚化要素を使用し、次いで、シャフトの遠位端をその覆い被さる気管内チューブと共に声帯に通して気管の中に操縦する。遠位端を、気管内チューブが気管の開口部と位置合わせされる角度位置に動かし、これに向けて前進させることによって、その後は、医師は気管内チューブを開口部の中に動かすだけである。一態様では、シャフトは、展性チュービングから作製することができる。代替的に、シャフトをその予め形状設定された構成に維持するのに必要とされる剛性を提供するために、シャフトの内側管腔に展性ロッドを挿入することができる。
本発明の舌リトラクタは、異なる体格及び年齢の患者に適応するように種々の形状及びサイズの湾曲導管に作製することができる。代替的に、リトラクタは、医師がこれを所望の形状に予め曲げることを可能にする展性材料から作製することができる。上述のように、舌リトラクタは、咽頭内部で異なる位置にこれを動かすことができるハンドルに取り付けられる。次いで、内視鏡は、舌を邪魔にならない所に移動させたリトラクタによって形成される導管に通して前進させ、声帯を識別し、気管の中に誘導することができる。本発明の一態様では、リトラクタは、下側シェルに解放可能に接続される上側シェルを含む。気管内チューブが入れられた後で、舌リトラクタを患者から取り出すことができる。しかしながら、リトラクタが、取り出される際に気管内チューブに力をかける場合、リトラクタは気管内チューブを一緒に引き出すことがある。これはもちろん望ましくない。説明される本発明では、リトラクタは、解放可能に互いに接続される2つのシェルから作製することができ、リトラクタは、容易に分割することができ、これにより、気管内チューブに摩擦をかけてこれを引きずり出すことなく、患者の口腔からより容易に取り出すことができる2つの部品をもたらす。別の態様では、2つのシェル片は、互いに対してスライドするように作製することができ、シェル片がスライドしてばらばらに離れることを可能にし、気管内チューブに力をかけてこれを引きずり出す恐れのない2つの部品をもたらす。
本発明では、可撓性に構成された内視鏡及び展性に構成された内視鏡の両方と、独立したスタイレットは、外ケーシング内に収容される操縦制御機構を含む。本発明の一実施形態では、操縦制御機構は、操縦制御機構及びシャフトの操縦可能な遠位端に取り付けられる少なくとも1つの制御ケーブルに接続される。簡単及び明快にするために、本明細書で説明される装置は、2つの「U形」ケーブルを使用し、各「U」の開口端は遠位の操縦可能な先端にしっかりと取り付けられ、「U」の湾曲部は、制御ディスクに可逆的に固定される。便宜上、互いの上に直交して配置される2つの「U」によって形成された4つのセグメントが、本明細書で「ケーブル」として説明される。限定はされないが3つ以上の個々のケーブル、又は形成された2つのループの遠位屈曲部を遠位の又は操縦可能な先端に固定することができる状態で、近位端で直交するように折り曲げられ、制御ディスクに可逆的に取り付けられるわずか1つの円形ケーブルを含むいくつかのケーブル構成が可能であることが分かるであろう。制御ディスクの辺縁に圧力をかけることによって、ディスクが傾き、ケーブルのうちの1つ又はケーブルの組み合わせが引っ張られ、装置を患者から取り出すことなくシャフトの操縦可能な遠位端がいくつかの異なる角度位置に動くことになる。操縦制御機構は、制御ケーブル及び遠位端を所望の角度位置に動かすために医師によって手で動かされるように設計される。本発明の一態様では、操縦制御機構は、外ケーシング内にピボット式に設置され、制御ケーブルに取り付けられる制御マウンティングディスク要素を含む。制御ケーブルに及ぼされる引張力は、親指及び人差し指の指先で制御マウンティングディスク上に単純に力をかけてこれを任意の半径方向の構成に傾けることによって生じることがある。ディスクは360°のうちのいずれかの角度をなして押し下げることができるので、ゆえに先端が同様に位置決めされることになる。したがって、本発明の操縦制御機構は、医師がシャフトの遠位端を所望の角度位置に迅速に操縦できるようにする単純な機構を提供する。
シャフトの屈曲及び再形状設定に関連する問題のうちの1つは、制御ケーブルが一定の長さであり、シャフトが1つの構成から別の構成に曲げられるときにはいつでもシャフトの操縦可能な遠位端及び制御ディスクを望ましくない角度位置に動かすことがあるということである。これは、シャフトが1つの屈曲構成から別の屈曲構成に動かされる際に制御ケーブルのうちの1つ以上がこれに及ぼされる引張力(張力)を有することになるために起こる。ケーブルのうちの1つ以上に作用するこの引張力(張力)は、次に、シャフトの遠位端及び制御ディスク上に及ぼされることになる。結果として、シャフトは新しい構成に再び形状設定することもできるが、このとき遠位先端部及び制御ディスクはそれらの調整能力の多くを失う。
本発明は、制御ケーブルによって遠位先端部又は制御ディスク上にどのような張力もかからないようにする又は張力を分散させることによってシャフトの遠位端のこの望ましくない移動をなくす。これはロック及びロック解除機構を介して達成される。ロック機構は、操縦制御機構と関連付けられ、シャフトが新しい構成に曲げられることになるときにケーブルが操縦制御機構から一時的に解放されることを可能にする。操縦制御機構への制御ケーブルのロック解除は、シャフトの屈曲によって制御ケーブルのうちの1つ以上に望ましくない張力がかかるのを防ぐ一助となる。シャフトが所望の構成に曲げられた後で、制御ケーブルを操縦制御機構のディスク要素にロックするべくロック機構を締め、ロック位置に戻すことができる。結果として、シャフトが所望の構成に曲げられた後でシャフトの可撓性の遠位端を実質的に直線構成に維持することができ、操縦制御機構の制御ディスクを中立位置にすることができる。次いで、操縦制御機構の操作を介してシャフトの遠位端を多くの角度位置のうちのいずれか1つに配置することができる。このとき、医師は、遠位端を所望の角度位置に動かす能力を損うことなく屈曲可能なシャフトの所望の形状を得ることができる。
本発明の別の態様では、装置は、制御ケーブルの各端が屈曲可能なシャフトの遠位端に取り付けられた状態で、少なくとも1つの制御ケーブルを使用する。特定のケーブル上の引張力が、遠位端を異なる角度位置に動かすことになる。遠位先端部は、シャフトよりも変形可能及び可撓性であるので、シャフトよりも優先的により撓むことになる。シャフトの遠位端への制御ケーブルの各端の接続は1つ以上のループをもたらし、これは次に、装置の操縦制御機構の制御ディスク要素に取り付けられる。制御ケーブルのループは、制御ディスクに取り付けることができ、ロック機構によって定位置に保持される。ロック機構は、屈曲するシャフトが所望の構成に形状設定されるときにはいつでもケーブルの一部から張力を解放することができるように1つ以上のループの位置が変えられることを可能にするために任意の時点で解放することができる。ロック機構は、制御ケーブルに生じた張力が解放されると、制御ケーブルのループが操縦制御機構に再びロックされることを可能にする。
本発明の1つの特定の態様では、操縦制御機構は、制御ケーブルが屈曲可能なシャフトの可撓性の端を動かすように手動で操作することができる、制御マウンティングディスクを含む。装置のユーザは、制御マウンティングディスクを容易に操作して、外側シャフトの遠位端の可撓性先端を全方向性の角度位置に動かすことができ、ユーザがこれを関心ある体腔に操縦することが可能となる。制御マウンティングディスクは、制御ケーブルのループを受け入れるように設計され、かつ、制御マウンティングディスクが傾けるアクションによって動かされるときに制御ケーブルを動かすように適合される。ループを制御マウンティングディスクにロックするために、ねじのようなファスナなどの単純なロック機構を用いることができる。本発明の実施形態のすべてにおいて、操縦制御機構は、操縦制御機構へのハーメチックシールを提供するエラストマー材料から作製された可撓性制御ケースで包むことができる。これはまた、(例えば傾けるアクションによって)操縦制御機構が外ケーシング内で動かされることを可能にする引き伸ばし可能な媒体を提供する。本発明の一態様では、制御マウンティングディスクは、装置の一部をなす中央チューブとピボット関係にある場合がある。制御マウンティングディスクをユーザの指で操作して、制御ケーブルを動かし、シャフトの遠位端のたわみ角を制御することができる。制御マウンティングディスク上のバイアスを維持してこれをニュートラル位置に維持するために、ばねなどの付勢部材を、制御マウンティングディスク及び外ケーシング内に設置されるばねサポートに接続することができる。
本発明の内視鏡バージョンは、装置に組み込むこともできるビデオ画像スクリーン又は接眼レンズなどの視覚化要素を含む場合がある。視覚化要素は、例えば装置のハンドル内に収容することができる電源に結合することができる。視覚化要素は、屈曲可能なシャフトの長さを通して延びる光ファイバケーブル又はファイバを含む場合があり、シャフトの遠位端に存在するレンズを含む。種々の視覚化要素の接続を完成させるために適切な結合要素を用いることができる。光源は、シャフトの遠位端で照明を提供するためにシャフトを通してその遠位端の外に延びることができる。
本発明は、限定はされないが気管内挿管、大腸鏡検査、気管支鏡検査、尿管鏡検査、鼻及び耳の検査及び手技などを含む多くの医療内視鏡手技にいくつかの種々のサイズ及び形状で用いられるように設計することができる。本発明の操縦機構は、非医療状況で(例えばボアスコープとして)同様に用いることもできる器具に組み込むことができる。
本発明の別の態様では、気管内チューブを患者の気管に入れるための方法は、操縦可能な遠位端を備えるシャフトを有する本明細書で説明される装置上に気管内チューブを配置することを含み、新規な操縦制御機構を組み込んだ装置は、一方の手だけを用いて遠位端を制限のない数の異なる角度位置に動かすことができる。従来の内視鏡は、普通は、垂直移動及び水平移動を別々に制御する2つの独立したホイールを有する。遠位先端部の真の制限のない半径方向の移動を達成するには2つの手を用いなければならないが、これは装置自体を支持されないままにするであろう。(実際には、装置全体が長軸上で回転されるが、これは真の半径方向の能力には当てはまらない)。気管への開口部をより良く見えるようにするために患者の舌をずらす新規な舌リトラクタを患者の口腔内に配置することができる。その後、本明細書で説明される内視鏡の可撓性シャフト及び覆い被さる気管内チューブを、舌リトラクタによって形成された導管に通して前進させることができる。内視鏡が舌の根元を越えて声帯の近傍に位置決めされると、これらの後者の構造体が見つけ出され、識別される。内視鏡は、次いで、声帯を常に見えている状態に保つために操縦機構を用いて前進させられる。次いで、気管内チューブの少なくとも一部が、声帯を通して気管の中に前進させられる。気管内チューブを気管にシールするために気管内チューブの可膨張性バルーンカフを膨らませ、内視鏡を取り出すこともでき、導管が依然として定位置にある状態で気管内チューブを介して肺の膨張を直ちに始めることができる。患者が適切に換気された後で、舌リトラクタを患者の口から取り出すこともできる。
本発明のこれらの及び他の利点は、本発明の原理を単なる例として示す図面と併せて取り上げられる好ましい実施形態の以下の詳細な説明から明らかとなるであろう。
本発明に従って作製される装置の実施形態がここで添付図を参照しながら詳細に説明される。最初に図1及び図2を参照すると、本発明に従って作製される密閉された内視鏡10は、可撓性又は展性シャフト18の遠位端16をいくつかの異なる角度位置に操縦するために手で操作することができる操縦制御機構14を収容する外ケーシング12を含む。操縦可能な遠位端16は、達成可能な異なる角度位置の数を最大にするそのニュートラル位置にある(遠位端が実質的に直線である)状態で示される。遠位端16によって達成することができる多くの角度位置のうちのほんのいくつかが図1にある点線によって表される。その遠位端に可膨張性バルーンカフ22が存在し、かつ、その近位端にTピースフィッティング23が存在する取り外し可能な気管内チューブ20(図2)は、気管内チューブ20が所望の体腔の開口部に入れられることを可能にするために、可撓性又は展性シャフト18の上に同軸に配置することができる。本発明は、気管挿管手技で用いられる内視鏡器具として図示及び説明されるが、本発明は、いくつかの医療手技で用いることができ、患者の他の体腔にフィットするサイズ及び形状に適合させることができることが分かるであろう。加えて、内視鏡の形態の本発明は、非医療用途に同様に用いることができる。
内視鏡10は、医療手技中に医師が器具をしっかりつかむことを可能にするハンドル24を含む。内視鏡10は、可撓性又は展性シャフト18の遠位端16に現れる像の鮮明なビューを医師に提供するためにハンドル24の真上の外ケーシング12上に設置されたビデオモニタ又は画面26を含む装置に組み込まれた視覚化システムを含む。内視鏡10は、画像伝送要素と、遠位端16に照明を提供するための光伝送要素を含み、これらはさらに詳細に後述される。図1及び図2で見られるように、広角レンズ28が、屈曲可能なシャフト18の遠位端16から延びる。内視鏡10に組み込むことができる視覚化要素及び照明要素は、外ケーシングからシャフト18の内腔を通して遠位端16に延びることができる。取り外し可能なバッテリパック(図示せず)を、視覚化要素及び照明要素に電力を与えるためにハンドル24に備え付けることができる。ビデオ画面26とバッテリパックとの両方は、操縦制御機構14又はシャフト18及び外ケーシング12内に収容された他の視覚化要素に支障を来さずにユニットが滅菌溶液に浸されることを可能にするために、外ケーシング12から容易に取り外すことができる。さらに詳細に後述されるように、内視鏡10は、内部要素を滅菌溶液から保護するために密閉することができる。
内視鏡10は、操縦制御機構14からシャフト18の遠位端16に延びるセグメント(図4、図10、図12、及び図15に示される)を有するいくつかの制御ケーブルを含む。これらの制御ケーブルはさらに詳細に後述される。操縦制御機構14は、遠位端16が種々の角度位置のうちのいずれか1つに動かされることになるように、これらの制御ケーブルの一つ一つに又は組み合わせに張力をかけるように設計される。医師は、結果的に遠位端16が所望の角度位置に屈曲するように制御ケーブルを動かすべく操縦制御機構を形成する要素を自分の指で単純に押すことによって操縦制御機構14を操作することができる。
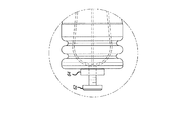
図2を詳細に参照すると、舌リトラクタ30が、図1の内視鏡10に配置された状態で示される。舌リトラクタ30は、気管内チューブ20及び内視鏡10の可撓性に構成されたシャフト18の上に同軸に延びるように設計される。その名が示すように、舌リトラクタ30は、気管の開口部を含む、したがって、気管内挿管の目標である声帯がより良く見えるようにするために、患者の舌を邪魔にならない所に移動するのに用いられる。舌リトラクタ30の上側部分(舌に実際に接触する部分)は、手技中に医師が舌を移動させることができるようにするために若干硬い。舌リトラクタ30は、声帯が見えるようにし、チューブを配置するための通路をあけるために、舌を後退させ、その位置を制御するのに用いられる際に、喉頭鏡と若干似たように機能する。現在の装置によって形成される導管はまた、ビューを不明瞭にし、かつ装置の除去及び洗浄を必要とすることがある口腔分泌物から視覚化要素を保護する。
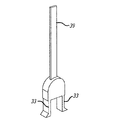
図2の舌リトラクタ30の特定の実施形態が図3A〜図3Dにさらに詳細に示される。図3A〜図3Dで見られるように、舌リトラクタ30は、底側シェル34に接続される上側シェル32を含む。舌リトラクタの上側シェル32及び下側シェル34は、シャフトの遠位端18を患者内に入れるために内視鏡10の可撓性シャフト18及び気管内チューブ20が通過し得る管腔(導管)を形成する。上側シェル32は、この上側シェル32が患者の舌と接触し、視野の外に移動させるという点で喉頭鏡のブレードと同様に作用する。上側シェル32と下側シェル34との両方は、上側シェル32及び下側シェル34を互いから分割するために医師がつかむことができる外向きに突き出るフィンガタブ35を含む。上側シェル32は、シェルの長さに沿って延び、かつ、下側シェル34の外縁に沿って形成された一対のフランジ付きの縁37を受け入れるように適合される一対の溝36を含む。この構造体は、リトラクタ30が患者から取り出されることになると、上側シェル32が下側シェル34から分割されることを可能にする。ハンドル39が、舌リトラクタを患者の口腔に入れるときにつかむための構造体を医師に提供するために、上側シェル32及び下側シェル34に取り付けられる。さらに、このハンドル39は、リトラクタ30の遠位端を気管開口部の近傍に配置するために操作者が患者の舌をずらすことを可能にする。ハンドル39は、上側シェル32及び下側シェル34が患者の口腔内の位置にとどまっている状態で、医師が酸素マスクを患者にぴったり取り付け、必要であれば手技中に換気することを可能にするために、上側シェル32及び下側シェル34から取り外し可能である。
リトラクタの上側シェル32は、患者の舌を後退させるときに十分な剛性を提供する硬質プラスチック材料から作製することができる。上側シェルは、代替的に、限定はされないが展性アルミニウム又は銅などの展性材料から作製することもでき、これは、医師がシェルを患者の解剖学的構造に合うように所望の構成に曲げることを可能にするであろう。下側シェル34は、上側シェル32を製造するのに用いられる材料よりも低い硬度のより可撓性の材料から作製することができる。下側シェル34の柔軟性は、2つのシェル32及び34が互いからより容易に分割されることを可能にする。さらに、より硬い上側シェル32に形成された溝36は、より硬いものとされ、下側シェル34のより軟らかい嵌合する縁を受け入れるためのより強い構造体を提供することになる。これらのシェル32及び34を形成するのに用いられる材料は、医療分野ではよく知られているプラスチックとすることもできる。
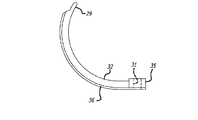
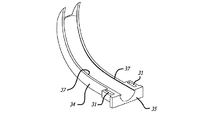
舌リトラクタ30の上側シェル32は、舌と喉頭蓋との間に形成された窪みである喉頭蓋谷内にフィットするように設計される遠位位置決め部材29を含んでもよい。喉頭蓋谷は、気管の挿管中に用いられる別の重要な参照位置である。遠位位置決め部材29は、喉頭蓋を後退させ、声帯の直視を容易にするために、喉頭蓋谷のできる限り奥に入れられるべきである。遠位位置決め部材29は、喉頭蓋谷と係合するとリトラクタブレードがそれ以上遠位に押されるのを防ぐ一助となるであろう。このように、舌リトラクタは、喉頭鏡と非常に類似して機能することになる。代替的に、舌リトラクタは、この遠位位置決め部材29なしに作製することもできる。舌リトラクタ30は、患者の解剖学的構造に合致する一助となるであろう予め形状設定された曲線を有する状態で示される。舌リトラクタ30は、医療手技中に直面する場合がある異なる解剖学的構造に合致するように任意の数の異なる曲線及び異なるサイズに作製することもできることが分かるであろう。加えて、上記のように、上側シェル32又は上側シェル32の一部は、必要に応じてその湾曲を変化させるために医師がリトラクタ30を曲げることができるようにする展性材料から作製することができる。
リトラクタブレードの上側シェル32及び下側シェル34はまた、ハンドル39(図3B参照)の端から延びる一対のアーム33を受け入れるシェルの近位端に形成された開口部31を含む。これらのアーム33は、ハンドル39を上側シェル32及び下側シェル34に取り付けるために開口部31に挿入可能である。各アーム33は、端が開口部31の外に出ると下側シェル34の縁と係合するように設計される端を含む。アーム33のこれらの端は、アーム33が開口部31の中に十分に入るとハンドル39を定位置にロックするために、外向きに付勢して下側シェル34の縁と係合するように設計される。各アームの端は、アーム33が開口部31から取り出されることを可能にするために内向きに容易に動かすことができる。アーム33は、アーム33が開口部31の中に入れられると、リトラクタブレードの上側シェル32と下側シェル34を一緒に保つ一助となる。
図3E〜図3Hは、本発明と共に用いることができる舌リトラクタ30の別の実施形態を示す。この特定のリトラクタ30は、上側シェル32及び下側シェル34を含むリトラクタブレードを同様に含む。この特定の舌リトラクタ30は、ハンドル39を上側シェル32及び下側シェル34に容易に接続する及び接続解除するために単純な解放機構を有する取り外し可能なハンドル39を含む。図3E及び図3Gで見られるように、ハンドル39は、下側シェル34上に形成されたピン43(そのうちの1つだけが図3Gに示される)を受け入れる一対のスロット付き開口部41を備えるように形状設定される。ハンドル39は、上側シェル32から延びる直立支持部材45の上に延びるように設計される。使用時に、ハンドル39は、直立支持部材45の上に配置され、ハンドル39をシェル32及び34に接続するためにピン43がスロット付き開口部41と係合するようにピボットされる。
図3Fは、図3A〜図3Dの実施形態に関して上述したようにシェル32及び34が互いから引き離されることを可能にする図3E及び図3Gに描画された上側シェル32及び下側シェル34の嵌合面の外形を示す。上側シェル32を下側シェル34に取り外し可能に接合するいくつかの方法が存在することが分かるであろう。例えば、展性材料が上側シェル32の一部を形成するのに用いられるとき、シェルを一緒に維持する一助となるように舌及び溝ジョイントを用いることもできる。他の例は、ややより大きい剛性をジョイントに提供するダブテールジョイントを含むがこれに限定されない。或る場合には、ジョイントは、むしろ上側シェルが下側シェルに対してスライドし、シェルを分割することを必要とするスライド型であろう。下側シェル34又は下側シェル34の一部はまた、舌リトラクタが操作者によって所望の形状に予め曲げられることを可能にするために、展性材料から作製することもできることも分かるであろう。
本発明に従って作製される内視鏡10は、器具が滅菌溶液に浸されることを可能にするために密閉することができる。図1及び図2で見られるように、可撓性制御ケース38が、外ケーシング12の一部の上に延び、操縦制御機構14の一部に取り付けられる。この可撓性制御ケース38は、滅菌溶液への障壁を提供しながら、操縦制御機構14が医師によってインピーダンスなしに操作されることを可能にするために引き伸ばし可能なエラストマー材料から作製することができる。内視鏡10の残りの部分は、器具全体(ビデオ画面及びバッテリパックを除く)が滅菌溶液に浸されることを可能にするために密閉されるように製造することができる。例えば、シャフトの遠位端に設置された視覚化要素と照明要素との間のどのような小さい開口部又は隙間も封止するために弾性シーラントが必要な場合がある。制御ケース38のこの特定の実施形態のより詳細な図面が図5、図10、図16、及び図17に提供される。
図5〜図9は、気管挿管を行うために、内視鏡10、気管内チューブ20、及び舌リトラクタ30をどのように用いることができるかを示す。図5は、患者の口腔に最初に挿入されている舌リトラクタ30を示す。この舌リトラクタ30は、患者の舌を移動させ、システムの残りの要素を受け入れるための導管をもたらす。声帯がより良く見えるようにするために舌が上方又は側方に後退させられることになるように、医師が舌に上向きの力を加えることができる。舌リトラクタは比較的硬い材料から作製されるので、これは舌及び関連する組織を容易に移動させるであろう。ハンドル39が、医師が患者の舌を適正に後退させるのに必要な力を加えることができるようにする適切な構造体を提供する。図6は、内視鏡10と、患者の気管の中に前進させられている内視鏡の屈曲可能なシャフト18の上に同軸に配置された気管内チューブ20からなる複合システムを示す。気管内チューブ20は、舌リトラクタ30によって形成された管腔内に入れられ、気管開口部の方の場所に操縦される。内視鏡の視覚化器具及び照明器具は、舌が後退させられると声帯の場所を医師が明瞭に観察できるようにするであろう。声帯が識別されると、医師は、図6で見られるように医師が遠位端16及び気管内チューブ20を気管の開口部の中に操作することを可能にするために、操縦制御機構14を用いて内視鏡10の遠位端16を操縦することができる。代替的に、医師は、可撓性シャフト18の遠位端16を気管の開口部と位置合わせされた状態に操縦し、気管内チューブ20が気管開口部のすぐ外側に位置決めされるようにすることができる。次いで、気管内チューブ20の遠位端を気管の中に注意深く押し込むことができる。この代替的な手法は、内視鏡の遠位端16を気管の開口部の中に実際に入れる必要をなくす。しかしながら、声帯の遠位にあり、かつ食道の内部から容易に見分けられる同軸気管リングの視覚化によって、気管内の正しい位置決めの絶対確認が与えられる。
本発明の内視鏡10の利点は、シャフト18の遠位端16を任意の有利な角度位置に操縦できることを含み、医師が気管内チューブ20を気管の開口部に単純に押し込むことを可能にする。本発明は、医師が気管内チューブ20を気管の中に前進させるために単一の器具を使用することを可能にし、したがって、喉頭鏡とスタイレットなどの2つの別個の要素を操作する必要をなくす。従来の内視鏡では、真の360°角回転を達成するのに両手が必要とされ、一方、これはここでは同じ手で達成される。展性シャフト18は、患者の口腔に反転される前に医師が予め形状設定することができる又は医師が遠位端16を気管の開口部の近くに位置決めするのに問題を有している場合に再度形状設定することができることが分かるであろう。シャフト18の展性は、したがって、装置を操作し、患者の特定の解剖学的構造に合うように所望の構成に曲げることができる別の手段を医師に提供する。
図7は、チューブの周りの気管をシールするシリンジ41を介して気管内チューブ20のバルーンカフ22を膨らませるステップを示す。図7はまた、気管内チューブ20及び舌リトラクタ30のみを定位置に残して患者の口腔から引き出されている内視鏡10を示す。このとき定位置にある導管で肺の換気を行うことができ、又は内視鏡10が取り出された後で、ハンドル39を上側シェル32及び下側シェル34から取り外すことができ、図8に示されるようにシェル32及び34が互いから分割され、患者から取り出されることを可能にする。使用中に、上側シェル32及び下側シェル34のそれぞれの上に形成されたフィンガフランジ35は、上側シェル32と下側シェル34との間の分割アクションを始めるために各フランジ35に外向きの力がかかっている状態でつかむこともできる。リトラクタ30に分割アクションが適用されている際にシェル32及び34の両方が患者の口腔から取り出されるまで上側シェル32と下側シェル34との両方を患者の口腔から同時に後退させることもできる。
代替的な方法では、舌リトラクタ30をチューブ20から同軸に後退させることができるように、気管内チューブ20の近位端に接続されたフィッティング22を取り外すこともできる。フィッティング22は、舌リトラクタ30が取り出された後で気管内チューブ20の端に再接続することもできる。舌リトラクタ30を取り出すこの様態では、分割可能な上側シェル32及び下側シェル34が必要とされないであろう。むしろ、舌リトラクタ30は、これを患者の口腔から取り出すためにリトラクタ30を気管内チューブ20の上で単純にスライドさせることもできるので中実部品として作製することもできる。
図9は、開いた気道を維持し、特定の制御されたガス及び/又は薬剤を投与することができる導管として役立つように患者の気管の中に適正に位置決めされた気管内チューブ20を示す。近位フィッティング23が除去された場合、これはチューブ20の上にまた配置することもできる。気管内チューブの近位フィッティング23は、次いで、麻酔呼吸回路、バッグバルブマスク装置、人工呼吸器、又は医療手技で用いられる他の器具に接続することができる。
本発明の別の特定の実施形態が図4に示される。この図では、本発明は、図1及び図2で開示された内視鏡10の同じ要素のうちの多くを含む独立したスタイレット40として示される。独立したスタイレットバージョンと本発明の内視鏡バージョンとの主な違いは、スタイレット設計に視覚化/照明器具とハンドルがないことである。使用中に、医師は、気管内チューブ20を定位置に配置するために外ケーシング12を保持することができる。スタイレットは、4本の指と手のひらでつかみ、所望の角度を達成するべく親指でディスクを適切な場所に押し下げることもできる。操縦制御機構14のさらなる説明が、図10に描画されたスタイレット40と併せて以下に示される。図4に示された特定のスタイレット40は、例えば喉頭鏡が用いられる従来の挿管手技で用いることができる。このスタイレット40は、スタイレット40が依然として患者の口腔内にある状態で、屈曲可能なシャフトの遠位端18を操縦する能力を医師に提供する。屈曲可能なシャフト18はまた、患者の特定の解剖学的構造体の周りで機能するように必要に応じて予め形状設定することができる。
スタイレット40は、例えば、視覚化システムのビデオケーブルを受け入れることができる外ケーシング12内に形成されたサイドポート(図10に示される)を含んでもよいことに留意されたい。ビデオケーブル及びレンズを、屈曲可能なシャフト18の内腔に、シャフト18の遠位端16まで入れることもできる。ビデオシステムは、したがって、シャフト18の遠位端16に現れる像を遠隔ビデオ画面又はモニタ上に提供することもできる。
屈曲可能なシャフトの遠位端を操縦するために実装することができる操縦制御機構14の1つの特定の実施形態が図1、図4、及び図10に開示される。操縦制御機構14は、図4及び図10に示すように、独立したスタイレット40に用いられる外ケーシング12に組み込まれた状態で示されるが、この同じ操縦制御機構14は、図1及び図2に示された本発明の内視鏡バージョンに組み込むことができる。図1及び図2の内視鏡10は、ハンドル24及びビデオ画面26用の設置を形成するために異なる外ケーシング12を使用することになるが、それにもかかわらず、図4及び図10に示され以下で開示されるのと同じ操縦制御機構14及び制御ケーブルを使用することができる。
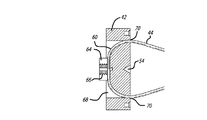
操縦制御機構14(図10及び図14)は、屈曲可能なシャフト18の遠位端16を動かすのに用いられる制御ケーブル44に接続される制御マウンティングディスク42を含む。制御マウンティングディスク42は、外ケーシング12内に収容され、外ケーシング12を通して延びる中央チューブ46にピボット式に設置される。図11で最もよく見られるように、中央チューブ46は遠位部48及び近位部50を含む。近位部50は、屈曲可能なシャフト18の遠位端16の角度位置を変化させるために制御マウンティングディスク42が制御ケーブル44を動かすことを可能にするピボット機構として用いられる。ピボット部材52(図14)は、近位部50の端に存在し、制御マウンティングディスク42上に形成された表面と接触するように設計される。本明細書で開示される特定の実施形態では、制御マウンティングディスク42は、中央チューブ46のピボット部材52とピボット式に係合するように設計される円錐形に形状設定された窪み54(図14)を含む。このように、制御マウンティングディスク42は、制御ケーブル44を動かす及び遠位端16を所望の角度位置に動かすためにいくつかの異なる位置のうちのいずれか1つにピボットする/傾けることができる。例えば、12時の位置でのディスク上の圧力が、ディスクを6時の位置で外方に傾け、そこに取り付けられるケーブルに張力を及ぼし、遠位先端部を下方に偏向させることになる。制御マウンティングディスク42がピボットすることを可能にするピボット部材/円錐形の窪み要素は、ピボット/傾けアクションを達成するのに用いることができるいくつかの要素のうちのほんの1つにすぎないことが分かるであろう。また、例えば、ピボット部材52は、円錐形の窪みが中央チューブ46上に形成される状態で、制御マウンティングディスク42自体に形成することもできる。要素を互いにピボット式に接続するためにユニバーサルジョイントなどのさらなるピボットジョイントを同様に用いることもできる。ピボット自体を完全になくし、ばね自体がピボットをなす状態で、ディスクを円すいコイルばね上に「浮かせる」こともできる。操縦制御機構14は、医師が操縦制御ディスク42を手で動かすことを可能にする任意の数の異なる移動機構を使用できることが分かるであろう。ピボット/傾け機構は、開示する目的で示される。
制御ケーブル44は、制御マウンティングディスク42に取り付けられた状態で図10に示される。図12で見られるように、各制御ケーブル44は、中央チューブ46の内腔53を通り、屈曲可能なシャフト18の内腔54を通って、遠位端16の内腔55に延びる。本発明のこの具体的な実施形態では、各制御ケーブル44は第1の端56及び第2の端58を含み、これらは両方とも屈曲可能なシャフト18の遠位端16に接続される。第1の端56及び第2の端58のそれぞれは、図12に示されるように遠位端16に存在するプレート59に取り付けられる。各ケーブル44の端56及び58は、ケーブル44が或る量だけ引かれるときにはいつでも遠位端16を所望の角度位置に動かすことができるように、プレート59上で他方から離間される。別のケーブル構成は、遠位先端部に固定されるが、定位置に調整される際に制御ディスクを通して滑動し、ロックすることができる、1つの大きい閉ループからなることもできることが分かるであろう。
制御ケーブル44の各端がシャフト18の遠位端16に取り付けられるので、閉ループ60が形成され(図14)、制御マウンティングディスク42に接続される。操縦制御機構14は、ループ60のそれぞれを制御マウンティングディスク42にロックするロック機構を含む。圧縮コイルばね62などのファスナは、各ケーブルループ60を制御マウンティングディスク42にロックするのに用いることができる単純な要素である。図10、図14、及び図15で見られるように、ケーブルループ60をディスク42に取り付ける及びロックするために、ねじ山66を含むマウンティング構造体64を用いることができる。ねじ山66は、ティーチケーブルループ60に接触し、それらを定位置にロックするためにねじ62が締められることを可能にする。マウンティング構造体64(図14)は、ケーブルループ60のそれぞれを受け入れる横開口部68の対を含む。制御マウンティングディスク42の面内の開口部70は、ケーブル44がこれらの開口部を通して延びることを可能にする。制御ケーブル44は、次いで、中央チューブ46の内腔53に延びる中央チューブ46の近位部48に形成される開口部71(図13)を通して延びる(図12)。このように、マウンティング構造体64は、横開口部68内に配置されたケーブルループ60をループが中央に置かれるように維持し、それらが制御マウンティングディスク42に対して横に動くのを防ぐ。各ループ60は、しかしながら、ループ60がねじ62によって定位置にロックされるまで開口部70を通して動かすことができる。使用時に、ユーザは、ねじ62がループ60を制御マウンティングディスク42の面に押し当てるまで、単純にねじを締める。ループ60は、ねじ62によってループ60上に及ぼされている力を解放するべく単純にねじを回すことによってロック解除することができる。図10及び図15で見られるように、制御ケーブルのループ60は、単一のねじ62がループ60を定位置にロックできるようにするために、制御マウンティングディスク42の中央付近で互いに交差する。各制御ケーブル44の各ループ60は、本発明の精神及び範囲から逸脱することなく同様に適切なロック機構によって個々にロックすることもできることが分かるであろう。
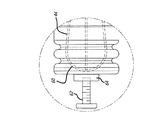
制御マウンティングディスク42は、中央チューブ46上に形成されたピボット部材52を中心としてピボットする/傾く(図25参照)。ばね72(図4参照)などの付勢部材が、外ケーシング12内に設置され、制御マウンティングディスク42の底面と接触する。ばね72の他の端は、外ケーシング12の内部に設置されたばねマウント(図4)に接触する。ばね72は、制御ディスク42に作用する力が存在しないときにはいつでも、制御マウンティングディスク42上に付勢力を与えて、図4に示されるようにディスク42をそのニュートラル位置に動かす。したがって、医師が自分の指を制御マウンティングディスク42から離すときに、ばね72が、ディスク42をそのニュートラル位置に戻るように動かすことになる。医師が制御マウンティングディスク42を或る様態で押すときにはいつでも、制御ケーブル44が引かれるか又は張力を逃がされて遠位端16を特定の角度位置に動かすことになる。制御ケーブル44は、したがって、互いに協働して遠位端16の所望の角度位置決めを達成する。
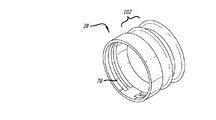
図1、図2、及び図4で見られるように、操縦制御ディスク42は、外ケーシング12へのハーメチックシールを維持する一助となる制御ケース38によって包まれる。この制御ケース38は、エラストマー材料から作製することができ、ケーシング12の外縁76に結合されてもよい。このカバー38は、ハーメチックシールを依然として提供しながら制御マウンティングディスク42がそのピボット部材52上で自由に関節運動することを可能にするために、制御マウンティングディスク42と接触するように設計される。図面に示される特定の制御ケース38の構造に関係するさらなる詳細が図15及び図16で開示され、後述される。制御ケース38は、例えば、制御マウンティングディスク42の縁を受け入れ、保持するために、その中に形成された溝78を含んでもよい。この制御ケース38は、制御マウンティングディスク42が外ケーシング12の内部で自由にピボットすることを可能にするために必要な場合に曲がる及び伸びるように設計される。
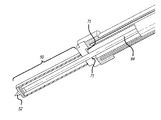
図12は、シャフト18及びその遠位端16の特定の実施形態を示す。図12で見られるように、シャフト18は、中央チューブ46の遠位部48に取り付けられ、シャフト18の遠位端16を形成する短い長さの可撓性チュービングに延びる。シャフト18は、予め形状設定された構成を維持するのに十分な曲げ強さを有する特定の長さの展性チュービング80から作製することができる。シャフトはまた、従来の内視鏡と同程度に可撓性とすることができ、生物学的なものであるか又は人工のものである導管に受動的に適合する。例えば、シャフト18は、カリフォルニア州サウスエルモンテのLegend Medical Devicesによって販売及び製造されるようなスタイレットの挿管に用いられる展性アルミニウム材料に類似した展性アルミニウムから作製することができる。銅などの他の類似の展性材料を用いることもできる。展性材料の物理的特性は、医師が過度の力をかける必要なしにシャフトを所望の構成に曲げることを可能にする。展性材料は、強くかかった圧力のない状態に構成を維持するのに十分なだけ強いべきである。展性チュービング80の近位端82は、中央チューブ46の遠位部48に取り付けられる。展性チュービング80の遠位端84は、次に、シャフト18の遠位端16を形成する容易に変形可能なチュービング86に取り付けられる。可撓性及び遠位先端部への付勢要素を追加するためにつる巻ばねが用いられてもよい。チュービングを互いに結合する適切な公知の方法を実施することができる。可撓性チュービング86は、チュービング86の管腔55内に延びるマウンティングプレート59を有する。上述したように、このマウンティングプレート59は、制御ケーブル44の端56及び58に接続される。また、マウンティングプレート59は、シャフト18の遠位端16に照明を提供するためにプレート59の外に延びる光ファイバ90を受け入れるための開口部を含む。広角又は「魚眼」型とすることができるレンズ28が、マウンティングプレート59から同様に延び、光学ケーブル92に接続され、光ケーブルは、シャフト18の管腔54を通して外ケーシング12に延び、そこでビデオモニタ26に接続される。光ファイバ90及び光学ケーブル92はまた、中央チューブ46の管腔53を通して延び、電源に取り付けられる。各光ファイバの遠位端は、シャフト18の遠位端16で照明を提供するレンズ100(図4参照)を含む。
図13は、独立したスタイレット40が、中央チューブ46を通して、かつ屈曲可能なシャフトの管腔を通して延びる展性ロッド94を使用する、本発明の一実施形態を示す。この展性ロッドは、中央チューブ46に接続することができ、少なくとも部分的にシャフトの長さに沿って延びることができる。この具体的な実施形態では、変形可能なチュービングは、予め形状設定された構成を維持するのに必要とされる曲げ性及び強度を提供する展性ロッドと共にシャフトを形成するのに用いることができる。このように、ロッドと変形可能なチュービングは、展性シャフトに必要とされる特性を得るべく協働する。
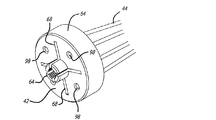
ここで図4、図10、及び図14〜図18を参照すると、スタイレット及び内視鏡の実施形態をなす種々の要素がさらに詳細に示され、さらに説明される。図14及び図15は、図4及び図9に示された制御マウンティングディスク42の特定の実施形態のさらなる詳細を示す。図15で最もよく見られるように、ディスク42の面の中に延びる十字開口部68は、各ループ60がディスク42上で横方向に動くのを防ぐ当接をもたらす。4つの別個の区域に切断されているがループ60をディスク42にロックするためにループ60のそれぞれの上に締まるねじ62を依然として受け入れることができるマウンティング構造体64が図15に示される。中央チューブ46のピボット部材52上でピボットする円錐形に形状設定された窪み54は、図14で最もよく見ることができる。制御マウンティングディスク42の面は、制御ケース38の内面上に形成された突起100(図17参照)を受け入れるように適合される開口部98を含む。
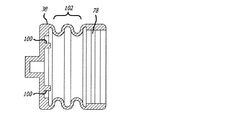
制御ケース38は、図16及び図17にさらに詳細に示される。図16は、ケーシング12の外縁上の構造体と係合するように設計される溝76(図10参照)を示す。図16及び図17の特定の制御ケース38は、制御マウンティングディスク42がユーザによって操作されているときに制御ケース38が撓む及び曲がることを可能にするベローズ構造体102が形成される領域を示す。制御ケース38の内面上に形成された突起100は、制御マウンティングディスク42上に形成された開口部98内に入るように設計される。これらの突起100は、制御ケース38が制御マウンティングディスク42に確実に接続されたままにするべくこれらの開口部98内に結合することができる。ディスク42の開口部98へのこれらの突起100の接続はまた、ディスク42がピボット部材52上で回転する可能性をなくす一助となる。制御ケース38の残りの部分は、器具の密閉をもたらし、維持するために、同様にケーシング12に結合することもできる。制御ケース38を形成するのに適切なエラストマー材料を用いることができる。
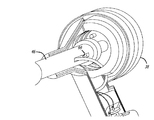
図18は、内視鏡に組み込まれる視覚化要素及び照明要素に携帯型電源を提供するのにバッテリパックをハンドル24内にどのように配置することができるかを示すためにハンドルの一部が取り外された状態の図1及び図2の内視鏡10のハンドル部の図を示す。この図はまた、中央チューブ46の管腔53及びシャフト18の管腔54につながる?中央チューブ46の側部開口部99を示す。図18で見られるように、中央チューブ46の側部開口部99に入るケーブルが示される。
シャフト18の及び中央チューブ46の内側管腔は、本発明の内視鏡/スタイレットと併せて用いられる種々のケーブル及び光ファイバを受け入れるための開口部を有する基本的に平坦なディスク(マウンティングプレート59のような)であるスペーサ(図示せず)を含んでもよい。こうしたスペーサは、種々のケーブル及び光ファイバが使用中に互いに交絡するのを防ぐ一助とするためにシャフト18及び中央チューブ46の長さに沿って配置することもできる。
図19〜図25は、シャフト18の可撓性又は展性部が新しい構成に曲げられた後で制御ケーブル44が「リセット」されることを可能にする機構を用いる際の本発明の利点を示す。シャフトの遠位端を動かすために制御ケーブル又はワイヤを使用する従来技術の装置に関連する問題のうちの1つは、シャフトが新しい構成に曲げられるときにはいつでも制御ワイヤがそれらのうちの1つ以上にかかる望ましくない張力を有することがあるということである。これは、制御ケーブルにかかる張力がシャフトの屈曲によって受動的に変化して、制御ケーブルが制御ディスク又は遠位先端部を望ましくない角度位置に動かす場合に起こる。本発明は、屈曲可能なシャフトの屈曲が制御ケーブル及びディスクに影響を及ぼす可能性をなくすように設計される。
本発明の操縦制御機構14は、シャフト18が新しい構成に曲げられた後で制御マウンティングディスク42へのループ44の取付点がリセットされることを可能にする制御ワイヤ44のそれぞれによって形成されたループ60を使用する。図19は、実質的に直線構成(第1の構成)にある屈曲可能なシャフト18を示す。気管内チューブ20は、その可膨張性バルーンカフ22がシャフトの一部の上に延びる状態であり、これらの図には、シャフト18の操縦可能な遠位端を覆う状態で示される。気管内チューブ20は可撓性であるため、操縦可能な遠位端は、操縦制御機構が操作されるときに依然として角度位置を変えることができる。代替的に、気管内チューブ20は、使用中に操縦可能な遠位端が十分に又は部分的に露出されることになるようにシャフト18のさらに上に配置することもできる。図20で見られるように、装置のロック機構、すなわち、ねじ62は、そのロック解除位置にある。この位置において、制御ケーブル44及び制御ケーブル44のそれぞれによって形成されるループ60は自由に動く。付勢部材、すなわち、ばね(図20には図示せず)は、図20に描画されるように制御マウンティングディスクをそのニュートラル位置に保つ付勢力を提供する。シャフト18がその第1の構成にあるとき、シャフトの遠位端16の角度位置は実質的に直線(そのニュートラル位置)である。この遠位端の実質的に直線又はニュートラル位置は、操縦制御機構によって遠位端を操縦することができる角度位置の数を最大にする。
図19に示されるように、シャフト18がその第1の構成にあるとき、各制御ケーブルの長さが設定される(長さは、遠位端へのその取付点から操縦制御機構へのその取付点までとして定義される)。これらの制御ケーブルは、シャフトがその第1の構成にあるときに最初の長さを有する。
図22は、このときシャフト18が湾曲構成(第2の構成)に予め曲げられていることを除いて、図19の同じスタイレット40を示す。したがって、最初に制御ケーブル44のループ60が制御マウンティングディスク上のロック位置にあり、次いでシャフト18が曲げられた場合、制御ケーブルの一部の上に張力が存在することになり、これは次に、遠位端に作用することになり、結果的に遠位端がその実質的に直線(ニュートラル)位置から望ましくない角度位置に動かされる。一般に、シャフトの屈曲部の外側半径上の制御ケーブルは、シャフトの屈曲部の内側半径上に存在するどの制御ケーブルよりも、それらに課されるさらなる張力を有することになる。遠位端が可撓性であるため、制御ケーブルに作用するどのような張力も、遠位端16がこうした力を容易に受けやすいので遠位端16にかかることになる。こうした張力は、制御ディスク42にも同様にかかり、制御ディスク42をその元のニュートラル位置から変位させることになる。図23の図では、しかしながら、シャフト18がその第2の構成に曲げられる際にロック機構はロック解除位置にとどまっている。ループ60は、操縦制御機構でロック解除されているため、自由に動くことができ、制御ケーブル又はディスク自体に望ましくない張力がかからない。実際に起こることは、制御ケーブルの1つのセグメントがその直線又はニュートラル位置から曲げられるときに、それが他のセグメントの長さの増加又は減少を補償したということである。したがって、ケーブルセグメントのうちの1つ以上の相対長さが変化したので、そうでなければシャフトの遠位端16又は制御ディスクに作用することになる特定のケーブル上の張力の解放が存在する。したがって、それらの最初の長さからの制御ケーブルセグメントの相対長さの変化は、図22に描画されるように遠位端16がその所望の実質的に直線(ニュートラル)位置にとどまることを可能にする。同様に、制御ディスク42は、このとき、その最初のニュートラル位置に戻る又はとどまることになり、遠位先端部16をさらに制御する全ての機能を可能にする。装置をニュートラル位置に戻す機構が存在しなかった場合、機能が失われたであろうということが容易に分かる。例えば、シャフトが下向きに6時の方に曲げられた場合、曲線の外側のケーブルに、この場合、シャフトの上方又は12時側のケーブルに張力がかかることになり、遠位先端部が上方に12時の方に曲がり、ディスクは12時に内方に及び6時に外方に傾くことで受動的に反応するであろう。ディスクを傾け、遠位先端部を制御する、全ての能力が損なわれることになる。しかし、最初にケーブルセグメントがディスクで解放され、シャフトが所望の通りに構成され、次いでケーブルセグメントがディスクにロックされる場合、全ての機能を維持することができる。これは、シャフト18が所望の第2の構成に曲げられ、ループ60がロック機構によって制御マウンティングディスク42にロックされることになる後でのみである。結果的に得られる構造体は、遠位端の実質的な直線(ニュートラル)位置を変えずに、各患者の様々な解剖学的特徴に適合するように、シャフト18がいくつかの構成のうちのいずれか1つに曲げられることを可能にする。
図22に示された装置の遠位端16の角度位置は、このとき容易に変えることができる。図24は、ループ60がロック位置に残っている状態でシャフト18が図22に示されるその屈曲構成にどのようにとどまるかを示す。医師は、このとき、装置を所望の位置に操縦するために遠位端16の角度位置を変えるべくマウンティングディスク42を操作するだけである。図25で見られるように、マウンティングディスク42の移動(12時に内方及び6時に外方)が、制御ケーブル44のうちの1つ以上に引張力をかけることになり、これが次に、これらの制御ケーブルに遠位端16を図22に示されるその最初の位置(図24に点線で示される)から図24に実線で示されるその新しい角度位置に動かす。図24の矢印は、遠位先端部16が、図22に示されるその最初の位置(点線)から図24に描画されるその新しい角度位置(実線)に動く方向を示す。
採用される補償装置が存在しなかった場合、すなわち、ケーブルが制御ディスクに固定されていた場合、シャフト自体が曲げられるときに、制御ケーブル44にかかった張力が、制御マウンティングディスク42をそのニュートラル位置から図25に示される傾いた位置に動かすことになり、結果的に遠位端16が望ましくない角度位置に動かされる。例えば、両手を使って、シャフトを中間点でつかみ、これを図24の位置に曲げる場合、上側ケーブルに張力がかかることになり、先端が図22のような位置に上がることになり、ディスクが12時に内方に傾くことになる。さらなる調整に支障を来すことになる。しかしながら、ケーブルが最初にディスクからロック解除され、シャフトが中間点で曲げられる場合、ディスク又は遠位先端部に小さい張力がかかることになり、ゆえに「ニュートラル」位置にとどまるはずである。ケーブルがロックされた後で、全ての機能が回復される。本明細書で説明されるロック解除及びロック解除装置を用い、シャフトを予め曲げることは、チップのさらなる調整を制限しない。
屈曲可能なシャフト18の第1の構成は、図19に示されるように実質的に直線である必要はないことを理解されたい。シャフト18の第1の構成は、例えば、図22に示されるように湾曲構成とすることができる。第2の構成は、例えば第1の構成とは異なる別の屈曲構成とすることもできる。これは実質的に直線構成とすることもできる。したがって、本発明は、屈曲可能なシャフトが1つの構成から別の構成に曲げられる際に1つ以上の制御ケーブルから(該ケーブルを効果的に長くすることによって)張力を除去するように設計される。
本発明は、一実施形態では、シャフトが新しい構成に曲げられることになった後で制御ケーブルの相対的な最初の長さが変えられることを可能にするために各制御ワイヤ上に形成されたループを使用する。ループ構造は、シャフトが新しい構成に再び形状設定される必要があるときにはいつでもユーザがケーブルの長さを迅速に変えることを可能にする単純な構成を提供する。この再形状設定はいくつかの方法で行うことができる。例えば、展性に構成された実施形態では、シャフトは口腔の外に構成される。天然であるか又は人工である導管を用いる場合、装置は、ロック解除され、導管に挿入され、シャフトが「ニュートラル」に戻り、次いで、ロックされることを可能にし、全ての機能が回復されることを可能にする。シャフトが本発明の精神及び範囲から逸脱することなく新しい構成に再び曲げられることになるときにはいつでもケーブルの最初の長さが変えられることを可能にする他の機構を用いることもできる。
また、本発明は、気管挿管手技に用いられる内視鏡器具として示され説明されるが、本発明は、いくつかの医療手技で用いることができ、患者の他の体腔にフィットするサイズ及び形状に適合させることができることが分かるであろう。例えば、装置の内視鏡バージョンは、患者に挿管するために気管内チューブが口腔ではなく鼻腔を通して挿入される、鼻挿管に用いることもできる。鼻挿管は、口腔外科処置中にしばしば用いられる。このような場合、気管内チューブが最初に内視鏡装置のシャフトに設置され、次いで、シャフトの遠位端が鼻腔に挿入される。装置のシャフトがいくらかの剛性を有する場合、シャフトは、患者の解剖学的構造にフィットするように最初に形状設定することもできる。内視鏡チューブ及び装置のシャフトを、次いで、気管の開口部に隣接する領域に同時に動かすことができる。シャフトの操縦可能な遠位端は、気管内チューブを気管の中に操縦するのに用いることができる。内視鏡装置の視覚化要素は、シャフトの遠位端及び気管内チューブを適正な位置に操縦する際に医師を支援することになる。
本明細書で説明される装置は、各新しい使用毎に装置が適正に滅菌されることを可能にする医療グレードの材料から作製することができる。材料は、滅菌プロセスを強化する殺生物剤を組み込むこともできる。シャフトは、上述のように異なる剛性を有する異なる部分を有することもできることが分かるであろう。遠位端は、例えば、遠位端が遠位端にかかる張力に優先的に反応することを可能にするであろう、可撓性又は展性シャフトよりも実質的により柔らかい材料から作製することもできる。遠位端及び先端は、次いで、シャフトよりも多く撓むことになり、該部分での微調整を可能にする。制御ケーブルは、プラスチック又は適切な金属又は金属合金から作製することができる。制御ケースは、いくらかの引き伸ばしを可能にする適切なエラストマー材料から作製することができる。制御マウンティングディスクは、同様に、適切な医療グレードの材料から作製することができる。装置と共に用いられる視覚化器具(ビデオ画面、光学ケーブル/ファイバ、バッテリ)は市販の器具とすることができる。装置を滅菌溶液に入れる前にこれらの要素が取り外されることを可能にするために、ビデオ画面は外ケーシングに取り外し可能に設置することができ、バッテリパックは同様にハンドル部から取り外し可能である。したがって、ビデオ画面及びバッテリパックは、装置の外ケーシングに組み込まれることになる簡易脱着式電気コネクタを使用することになる。こうしたコネクタは当該技術分野ではよく知られている。
本発明の特定の形態が説明及び図示されているが、本発明の精神及び範囲から逸脱することなく種々の修正を加えることができることも当業者には明らかであろう。したがって、本発明は付属の請求項以外によって制限されることを意図されない。
Claims (6)
- 気管内挿管装置であって、
近位端を有する外ケーシングと、
前記外ケーシングを通して延び、かつ操縦可能な遠位端を有するシャフトと、
前記シャフトの操縦可能な遠位端をいくつかの異なる角度位置に動かすための操縦制御機構であって、前記操縦制御機構は手で移動可能であり、かつ制御ディスクを備える、操縦制御機構と、
少なくとも1つのばね部材と、
固定されたばねマウントであって、前記少なくとも1つのばね部材は、前記制御ディスクと前記固定されたばねマウントとの間に延びる、ばねマウントと、
前記シャフトの操縦可能な遠位端に、かつ前記制御ディスクに取り付けられた少なくとも1つの制御ケーブルであって、前記操縦制御機構は、前記制御ディスクに圧力がかけられるときに、前記制御ディスクが前記少なくとも1つの制御ケーブルに前記シャフトの操縦可能な遠位端を異なる角度位置に動かすようにさせるように構成される、制御ケーブルと、
を備える、装置。 - 前記制御ディスクは、前記ばね部材上に「浮く」ことができる、請求項1に記載の装置。
- 前記装置は可撓性制御ケースを備え、前記少なくとも1つのばね部材は前記可撓性制御ケース内に位置する、請求項1に記載の装置。
- 気管内挿管装置であって、
近位端及び可撓性制御ケースを有する外ケーシングと、
前記外ケーシングを通して延び、かつ、可撓性でかつ操縦可能な遠位端を有するシャフトと、
第1の端、第2の端、及び前記第1の端と前記第2の端との間にある中間部分を有する第1の制御ケーブルであって、前記第1の制御ケーブルは前記可撓性制御ケースを通して延び、前記第1の制御ケーブルの第1の端及び第2の端は、前記シャフトの可撓性でかつ操縦可能な遠位端に取り付けられる、第1の制御ケーブルと、
第1の端、第2の端、及び前記第1の端と前記第2の端との間にある中間部分を有する第2の制御ケーブルであって、前記第2の制御ケーブルは前記可撓性制御ケースを通して延び、前記第2の制御ケーブルの第1の端及び第2の端は、前記シャフトの可撓性でかつ操縦可能な遠位端に取り付けられる、第2の制御ケーブルと、
前記シャフトの可撓性でかつ操縦可能な遠位端をいくつかの異なる角度位置に動かすための操縦制御機構であって、前記操縦制御機構は手で移動可能であり、かつ移動可能に設置された制御ディスクを備え、前記制御ディスクは表面を有し、前記第1の制御ケーブル及び前記第2の制御ケーブルの中間部分は、前記制御ディスクの表面の上に延び、前記操縦制御機構は、前記少なくとも1つの制御ケーブルに前記シャフトの可撓性でかつ操縦可能な遠位端を異なる角度位置に動くようにさせるために、前記第1の制御ケーブル及び前記第2の制御ケーブルを選択的に動かすように構成される、操縦制御機構と、
を備える、装置。 - 前記第1の制御ケーブル及び前記第2の制御ケーブルの中間部分は、前記制御ディスクの表面を横切って延びる、請求項4に記載の装置。
- 気管内挿管装置であって、
近位端を有する外ケーシングと、
前記外ケーシングを通して延び、かつ遠位端を有するシャフトと、
前記外ケーシング内に位置する部材と、
前記外ケーシング内に延びる少なくとも1つのケーブルであって、前記ケーブルは、前記部材に取り付けられた第1の端、前記シャフトの遠位端に取り付けられた第2の端、及び前記第1の端と前記第2の端との間に延びる中間部分を有し、前記ケーブルの中間部分はある長さを有し、前記ケーブルの中間部分の長さは、前記シャフトの遠位端が「J」形の構成に維持されるように設定される、ケーブルと、
を備える、装置。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361791596P | 2013-03-15 | 2013-03-15 | |
| US61/791,596 | 2013-03-15 | ||
| US201414206784A | 2014-03-12 | 2014-03-12 | |
| US14/206,784 | 2014-03-12 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016501928A Division JP6531090B2 (ja) | 2013-03-15 | 2014-03-13 | 気管内挿管装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019166340A true JP2019166340A (ja) | 2019-10-03 |
Family
ID=51580946
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016501928A Expired - Fee Related JP6531090B2 (ja) | 2013-03-15 | 2014-03-13 | 気管内挿管装置 |
| JP2019094259A Pending JP2019166340A (ja) | 2013-03-15 | 2019-05-20 | 気管内挿管装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016501928A Expired - Fee Related JP6531090B2 (ja) | 2013-03-15 | 2014-03-13 | 気管内挿管装置 |
Country Status (4)
| Country | Link |
|---|---|
| EP (2) | EP3335620B1 (ja) |
| JP (2) | JP6531090B2 (ja) |
| CA (2) | CA3026680C (ja) |
| WO (1) | WO2014151392A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6511781B2 (ja) * | 2014-11-13 | 2019-05-15 | 日本ゼオン株式会社 | 医療用スタイレット |
| US20180318538A1 (en) * | 2015-11-03 | 2018-11-08 | John William Nowlin | Guidable intubation stylet |
| JP2018061669A (ja) * | 2016-10-12 | 2018-04-19 | 国立大学法人神戸大学 | 挿管用具、および、気管内チューブシステム |
| BR112020014176A2 (pt) * | 2018-01-12 | 2020-12-08 | Through the Cords, LLC | Dispositivos e métodos para introduzir um tubo endotraqueal |
| CN111514420B (zh) * | 2019-02-02 | 2024-02-02 | 李大庆 | 喉罩及其喉罩主体、视像远端容纳结构 |
| US20220126042A1 (en) * | 2019-02-02 | 2022-04-28 | Changsha Magill Medical Technology Co., Ltd. | Laryngeal mask airway |
| CN111514426B (zh) * | 2020-06-02 | 2024-09-03 | 华中科技大学同济医学院附属协和医院 | 一种实验鼠气管插管辅助工具及实验鼠气管插管方法 |
| US11497394B2 (en) * | 2020-10-12 | 2022-11-15 | Wm & Dg, Inc. | Laryngoscope and intubation methods |
| CN115530737B (zh) * | 2022-09-20 | 2023-12-15 | 江苏永乐医疗科技有限公司 | 一种具有稳固式连接组件的可视软性喉镜 |
| CN119769981B (zh) * | 2024-12-31 | 2025-07-04 | 南通独角兽医疗电子有限公司 | 一种医用喉镜镜头装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007136128A (ja) * | 2005-11-17 | 2007-06-07 | River Seiko:Kk | 内視鏡用クリップ装置 |
| JP2009539472A (ja) * | 2006-06-05 | 2009-11-19 | ケンブリッジ・エンドスコピック・ディヴァイセス,インコーポレーテッド | 手術器具 |
| JP2010214043A (ja) * | 2009-03-19 | 2010-09-30 | National Cancer Center | 挿入器具の湾曲操作装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5431152A (en) * | 1993-09-21 | 1995-07-11 | Flam; Gary H. | Oral fiberoptic intubating apparatus and method |
| US6539942B2 (en) * | 2001-04-19 | 2003-04-01 | Richard Schwartz | Endotracheal intubation device |
| JP3704132B2 (ja) * | 2003-04-16 | 2005-10-05 | 東芝テリー株式会社 | 首振り操作装置 |
| US7410462B2 (en) * | 2004-12-13 | 2008-08-12 | Gyrus Acmi, Inc. | Hermetic endoscope assemblage |
| JP4616017B2 (ja) * | 2005-01-17 | 2011-01-19 | オリンパス株式会社 | 電動湾曲内視鏡装置 |
| US20060253197A1 (en) * | 2005-05-09 | 2006-11-09 | Napier Bradford | Shape-memory port-access tube |
| US7708758B2 (en) * | 2006-08-16 | 2010-05-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US8409245B2 (en) * | 2007-05-22 | 2013-04-02 | Woojin Lee | Surgical instrument |
| US8366612B2 (en) * | 2009-09-25 | 2013-02-05 | Spectrum Health Innovations, LLC | Laryngoscope guide and related method of use |
| US8677990B2 (en) * | 2010-04-28 | 2014-03-25 | Syncro Medical Innovations, Inc. | Endo-tracheal intubation device with adjustably bendable stylet |
| US20120253326A1 (en) * | 2011-03-29 | 2012-10-04 | Tyco Healthcare Group Lp | Articulation of Laparoscopic Instrument |
-
2014
- 2014-03-13 CA CA3026680A patent/CA3026680C/en active Active
- 2014-03-13 CA CA2906630A patent/CA2906630C/en active Active
- 2014-03-13 WO PCT/US2014/025642 patent/WO2014151392A1/en not_active Ceased
- 2014-03-13 JP JP2016501928A patent/JP6531090B2/ja not_active Expired - Fee Related
- 2014-03-13 EP EP17209609.1A patent/EP3335620B1/en active Active
- 2014-03-13 EP EP14770927.3A patent/EP2967306B1/en not_active Not-in-force
-
2019
- 2019-05-20 JP JP2019094259A patent/JP2019166340A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007136128A (ja) * | 2005-11-17 | 2007-06-07 | River Seiko:Kk | 内視鏡用クリップ装置 |
| JP2009539472A (ja) * | 2006-06-05 | 2009-11-19 | ケンブリッジ・エンドスコピック・ディヴァイセス,インコーポレーテッド | 手術器具 |
| JP2010214043A (ja) * | 2009-03-19 | 2010-09-30 | National Cancer Center | 挿入器具の湾曲操作装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA3026680A1 (en) | 2014-09-25 |
| EP2967306A4 (en) | 2016-12-07 |
| JP6531090B2 (ja) | 2019-06-12 |
| EP3335620A1 (en) | 2018-06-20 |
| CA2906630C (en) | 2019-01-29 |
| EP2967306A1 (en) | 2016-01-20 |
| EP3335620B1 (en) | 2021-05-12 |
| WO2014151392A1 (en) | 2014-09-25 |
| CA3026680C (en) | 2019-12-31 |
| JP2016512115A (ja) | 2016-04-25 |
| EP2967306B1 (en) | 2020-12-23 |
| CA2906630A1 (en) | 2014-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11517186B2 (en) | Endotracheal intubation devices | |
| JP6531090B2 (ja) | 気管内挿管装置 | |
| US10744288B2 (en) | Tracheal intubation system including a laryngoscope | |
| US20230173209A1 (en) | Articulating stylet | |
| JP7133110B2 (ja) | 気管内チューブ挿入装置 | |
| US10335023B2 (en) | Endotracheal tube insertion device | |
| CA3073511A1 (en) | Medical devices with camera and methods of placement | |
| US20180064895A1 (en) | Devices, systems and methods for improved intubation and management of airways | |
| US20180318538A1 (en) | Guidable intubation stylet | |
| US8425409B2 (en) | Laryngoscope | |
| Ferrario | Intubation stylets |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190521 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200526 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201222 |