JP2018538104A - 中空構成要素の変形検出装置 - Google Patents
中空構成要素の変形検出装置 Download PDFInfo
- Publication number
- JP2018538104A JP2018538104A JP2018533115A JP2018533115A JP2018538104A JP 2018538104 A JP2018538104 A JP 2018538104A JP 2018533115 A JP2018533115 A JP 2018533115A JP 2018533115 A JP2018533115 A JP 2018533115A JP 2018538104 A JP2018538104 A JP 2018538104A
- Authority
- JP
- Japan
- Prior art keywords
- frame
- arm
- indicator
- hollow component
- deformation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images













Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/32—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring the deformation in a solid
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/32—Joints for the hip
- A61F2/34—Acetabular cups
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/17—Guides or aligning means for drills, mills, pins or wires
- A61B17/1739—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body
- A61B17/1742—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body for the hip
- A61B17/1746—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body for the hip for the acetabulum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor
- A61F2/4603—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/4609—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor for insertion or extraction of endoprosthetic joints or of accessories thereof of acetabular cups
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/22—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring angles or tapers; for testing the alignment of axes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0811—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor
- A61F2/4657—Measuring instruments used for implanting artificial joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2002/30001—Additional features of subject-matter classified in A61F2/28, A61F2/30 and subgroups thereof
- A61F2002/30316—The prosthesis having different structural features at different locations within the same prosthesis; Connections between prosthetic parts; Special structural features of bone or joint prostheses not otherwise provided for
- A61F2002/30329—Connections or couplings between prosthetic parts, e.g. between modular parts; Connecting elements
- A61F2002/30471—Connections or couplings between prosthetic parts, e.g. between modular parts; Connecting elements connected by a hinged linkage mechanism, e.g. of the single-bar or multi-bar linkage type
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2002/30001—Additional features of subject-matter classified in A61F2/28, A61F2/30 and subgroups thereof
- A61F2002/30316—The prosthesis having different structural features at different locations within the same prosthesis; Connections between prosthetic parts; Special structural features of bone or joint prostheses not otherwise provided for
- A61F2002/30535—Special structural features of bone or joint prostheses not otherwise provided for
- A61F2002/30617—Visible markings for adjusting, locating or measuring
Abstract
本発明は、中空構成要素に嵌合して、中空構成要素が変形したかどうかを示すための装置を提供し、この装置は、構成要素に嵌合し得るフレームと、吊り下げ状態でフレームに連結される細長いインジケータと、を含み、フレームのあらゆる変形が、インジケータの偏向として可視化される。
Description
本発明は、中空構成要素の変形を検出するための装置及びその装置を使用する方法に関する。具体的には、本発明は、整形外科用人工関節のカップ構成要素など整形外科用中空構成要素の変形を検出するための装置に関する。
圧入固定は、整形外科用プロテーゼの構成要素を埋め込むための一般的な技術であり、セメント、ネジ、又はスパイクのような補足的固定を必要としない。インプラントと周囲の骨との締まり嵌めにより、インプラントの短期的安定性が達成される。長期的安定性は、外部の粗化又は多孔質表面によって典型的に支援される骨内部成長又は骨成長によって達成される。このような固定技術は、整形外科用人工関節のカップ構成要素の固定に適用できる。これらは、例えば、人工股関節の寛骨臼構成要素の固定に適用できる。これらは、解剖学的人工肩関節の関節構成要素の固定に適用できる。これらは、リバース型人工肩関節の上腕骨構成要素の固定に適用できる。
締まり嵌めは、準備された埋め込み部位よりも概して大きい構成要素によって生じる。例えば、股関節形成術では、患者の寛骨臼の準備に使用される最終リーマーよりも、通常1〜4mm大きい、半球状の多孔質被覆臼蓋構成要素が、力を加えて寛骨臼に嵌入されるであろう。寛骨臼構成要素と受容骨との間に締まり嵌めが形成される。
Squire et al(J Arthroplasty 2006 Sep;21(6 Suppl 2):72〜7)は、この強制挿入中に寛骨臼構成要素に作用する圧縮力は、寛骨臼構成要素のリムの幾何学的形状が円形から、例えば楕円形に変化することから明らかなように、構成要素の変形を生じさせ得ることを示した。この変形は、軸受形状の変更、ライナの正確な整列及び着座の不能などに起因するものなど、臨床的帰結に悪影響を及ぼす。
したがって、外科医が、寛骨臼構成要素が変形しているかどうかを事前に及び/又は手術中に検出できることは、臨床的に重要である。その結果、外科医は、寛骨臼カップの変形が大き過ぎて使用できないかどうかを決定できる。外科医は、寛骨臼カップ構成要素の変形の程度に関する情報を使用して、寛骨臼の更なるリネーミングが必要かどうかを評価してよい。変形の程度がわずかであり、臨床的帰結に悪影響を及ぼさない、又はそれに続く埋め込みで変形が解消されることがある。しかし、変形量が小さく、それを眼で判断することは困難であり得、特に、薄壁の寛骨臼構成要素はそれに該当する。
Squire et alは(上記の論文で)、寛骨臼構成要素の変形は、テレスコーピングゲージと、一対のノギスなど測定器を併用して測定できることを提案している。この2段階の方法では、寛骨臼構成要素にゲージを挿入し、所定の位置に固定し、次いで、固定したゲージ端間の距離をノギスを使用して測定する。これは時間のかかる方法である。この方法では、ユーザーは、ノギスの読み取りに慣れている必要がある。また、両手を使用して機器を器用に取り扱う必要がある。また、在庫内に追加の無菌計装を必要とする。
本発明は、中空構成要素に嵌合して、中空構成要素が変形したかどうかを示すための装置を提供し、この装置は、構成要素に嵌合し得るフレームと、吊り下げ状態でフレームに連結される細長いインジケータと、を含み、フレームのあらゆる変形が、インジケータの偏向として可視化される。
したがって、本発明は、中空構成要素の変形を示すために中空構成要素に嵌合するための装置を提供し、この装置は、
フレームと、
吊り下げ状態でフレームに連結される細長いインジケータであって、フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える。
フレームと、
吊り下げ状態でフレームに連結される細長いインジケータであって、フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える。
本発明により提供される装置は、非変形状態の位置からのインジケータの角度偏向により、使用される中空構成要素が変形していることをユーザーに容易に認識させることができる。装置は、変形力の付加中に変形を検出できるように、変形を生じさせ得る力に中空構成要素が曝露される前に、中空構成要素内に位置付けることができる。装置は、中空構成要素内に位置付けて、中空構成要素が既に変形したかどうかを判定できる。ごくわずかなフレームの変形(例えば、(構成要素が円形である場合、横断面での観察時にその直径とみなされるであろう)中空構成要素の横断寸法の約3%未満、又は約2.5%未満、又は約2%未満、又は約1%未満)に続いて容易に認識できるインジケータの偏向が生じるように装置を構築することが可能である。
細長いインジケータは、アーム対によって、吊り下げ状態でフレームに連結され得る。第1のアームは、フレームの第1の側の第1の点から内方に延び、第2のアームは、フレームの第2の側の第2の点から内方に延び、第2の側は第1の側に対向する。細長いインジケータは長手方向軸を有し、第1及び第2のアームは、この軸に沿って離間した点においてこの軸に連結されて、細長いインジケータを吊り下げ状態でフレームに連結する。フレームの変形によって生じるフレームの両側の第1の点と第2の点との間の距離の変化は、インジケータの角度偏向をもたらす。
フレームの変形に対するインジケータの角度偏向応答は、アーム間の距離の影響を受ける。第1のアームの長さが、第2のアームの長さと等しくなることはたびたび生じる。これは、フレームの変形に応答して、インジケータの制御された角度偏向をもたらすことに役立ち得る。任意に、第1及び第2のアームが同一の長さを有する場合、インジケータに沿って測定されるアーム間の距離に対するアームの長さの比率は、少なくとも約0.3、又は少なくとも約0.5、又は少なくとも約1、又は少なくとも約1.5、又は少なくとも約2、又は少なくとも約2.5である。任意に、この比率の値は、約6以下、又は約5以下、又は約4.5以下、又は約4以下、又は約3.5以下である。
任意に、フレームの非変形時には、第1のアームは第2のアームとほぼ平行である。装置(及び装置が位置付けられる中空構成要素)が変形すると、装置の変形の性質によっては、変形前に装置内で平行であるアームが変形することはよくあることであろう。
第1及び第2のアームのそれぞれとインジケータとの間の角度は、フレームの非変形時に約90°であってよい。変形前には、第1及び第2のアームのそれぞれとインジケータとの間で約90°以外の角度が想定される。例えば、アームの一方又はそれぞれと、アーム間に延びるインジケータの部分との間の角度は、少なくとも約60°、又は少なくとも約70°、又は少なくとも約80°であり得る。当該角度は、約120°以下、約110°以下、又は約以100°以下であり得る。
ヒンジは、第1及び第2のアームのそれぞれとインジケータとの間の角度が変化するように、装置の変形時に、第1及び第2のアームのそれぞれとインジケータとの間の角度を変化させることができる。ヒンジは、アームがインジケータに連結されるアームの端部方向に設けられてよい。有利には、ヒンジは、アームがインジケータに連結されるアームの端部に設けられる。この結果、インジケータの可動域が大きくなり、したがってフレームの変形を拡大する能力が増大する。他の配置では、ヒンジは、アームの両端間に設けてよい。その結果、アームとインジケータとの連結は、相対的に強固であり得る。
ヒンジは、アームの残りの部分よりも薄いアームの部分によって設けられてよい。このようなヒンジ配置は、リビングヒンジと呼ばれることがある。このようなヒンジを用いることにより、2つのアーム及びインジケータを、例えば成形によって一体に形成できる。アームは、アームが力を受けることによって生じるアームとインジケータとの間の角度の変化が、アームの残りではなく、主に薄い部分で生じるような薄さである。これにより、インジケータのより正確な応答及び明瞭度が提供される。
薄いヒンジ部の領域にあるアームの壁は、アームを片側から観察すると丸みを帯びているため、装置の変形時にヒンジが撓む点において急激な壁厚の変化が生じないことが好ましいことがある。このようにすることは、ヒンジの弱化及び故障をもたらし得る、ヒンジにおける応力集中の低減に役立ち得る。
装置はまた、吊り下げ状態でフレームに連結されている、第2の細長いインジケータも含み得る。この第2の細長いインジケータにより、中空構成要素の変形を、2つの軸に沿って検出できる。
第2の細長いインジケータは、第2のアーム対によって吊り下げ状態でフレームに連結され得る。第2のアーム対は、フレームの第3の側の第3の点から内方に延びる第3のアームと、フレームの第4の側の第4の点から内方に延びる第4のアームとを含み、第4の側は第3の側に対向する。第2の細長いインジケータは、第3及び第4のアームが軸に沿って互いに離間した点において連結される長手方向軸を有する。
任意に、フレームは、連続した周囲を有する。装置が内部に位置付けられる中空構成要素に圧縮力を付加した結果生じる、装置の周囲でフレームが連続している装置の変形により、装置の第1の寸法が減少し、装置の第2の寸法が増加する(第1の寸法は、第2の寸法に対して横方向に測定する)。装置の周囲でフレームが連続している装置を使用して、装置内の一方若しくは両方のアームと概ね揃っている方向、並びに一方又は両方のアームと揃っていない方向、例えば、一方若しくは両方のアームと概ね垂直の方向又は一方若しくはそれぞれのアームと鋭角を形成する方向で中空構成要素の変形を検出できる。
フレームは、装置の使用が意図される中空構成要素にぴったりと嵌合するように構成される必要がある。フレームが装置の周囲を連続して延びる場合、フレームは、フレームが装置の周囲と接触するように、中空構成要素の内部形状を補完するべき形状であることが概ね好ましいであろう。
装置の周囲を連続して延びないフレームは、装置の周囲に離間したフレーム部を有し得る。これらのフレーム部は、圧縮力が構成要素に付加される軸上、又はその軸付近の点において中空構成要素と接触し得るように概ね配置されるであろう。
多くの場合、中空構成要素は円形であり、本発明の装置を使用して検出されるべき構成要素の変形は、円形から、例えば略楕円形状又は楕円形状への変形を含むであろう。この形状変化は、インジケータの角度偏向によって検出できる。
印は、ユーザーがインジケータの角度偏向を認識しやすくするため、又は定量化するために装置に設けられ得る。印は、フレーム、特に、変形前のインジケータの端部に隣接するフレーム部に設けられ得る。インジケータは、第1及び第2の対向する端部を有することが多い。その結果、印は、インジケータの各端部に隣接して設けられ得る。フレームの製造に成形技術が使用される場合、印は、フレームの成形時にフレーム上に設けられ得る。印は、設けられる表面と適切に対比される印をもたらす材料又は技術を使用して、装置上に示され得る。いくつかの状況においては、印はレーザーマーキングによって設けられ得る。
印は、ユーザーがインジケータの偏向量を定量化できるようにしてよい。印は、目盛尺として設けられてよい。印は、中空構成要素が特定の偏向量に達した、又はそれを超えたことをユーザーに示すためだけに設けられてよい。この量は、整形外科用カップ構成要素の変形の臨床的に問題とされる量であってよい。印は、特徴的なマーキング、特に、対照的な色、例えば、赤線などでのマーキングを含んでよい。この線に対する、又はこの線を越えるインジケータの偏向は、中空構成要素の特定の変形量に達した、又はそれを超えたことをユーザーに視覚的に示す。
任意に、装置はマーカーを更に含み、マーカーは、フレームに回転可能に装着され、細長いインジケータによる偏向のために配置されることによって、装置が中空構成要素内に2方向以上で配置されたときに、細長いインジケータの一連の角度偏向から細長いインジケータの最大の角度偏向を示す。
マーカーは、細長いインジケータの第1の角度偏向に応答して第1の位置から第2の位置に角度偏向し、自動的に第1の位置に戻らないように配置される。マーカーはまた、第2の角度偏向が第1の角度偏向よりも大きいときに、細長いインジケータの第2の角度偏向に応答して、第2の位置から第3の位置に角度偏向するように配置される。第2の角度偏向が第1の角度偏向以下である場合、マーカーは第2の位置に留まる。
マーカーが第3の位置に留まっており、自動的にその元の位置に戻ることがないという事実により、ユーザーは、例えば中空構成要素内で装置を回転させることによって、装置を中空構成要素内の2方向以上で方向付け、それにより細長いインジケータの最大の角度偏向量(第3の位置で示す)を決定できる。マーカーによって検出される最大の角度偏向量は、中空構成要素の最大変形量を示す。このことは、ユーザーが、中空構成要素が所定の許容限度を超えて変形したかどうかを識別するのに役立つ。該当する場合には、中空構成要素を廃棄する必要があり得る。試験用寛骨臼シェルの場合、外科医は、最終寛骨臼シェルインプラントを埋め込み、次いでライナを挿入する前に、患者の寛骨臼が追加のリネーミングを必要とするかどうかの情報を外科医に提供することもできる。
いくつかの構造において、細長いインジケータ及びマーカーは、それぞれ、共通回転軸の周りを回転するように回転可能に装着される。
マーカーは、フレーム上の第1の点と第2の点との間を延びるプレートに連結されてよい。プレートは、フレームに取り外し可能に連結されてよい。
有利には、第2の偏向インジケータの偏向量を示すために、少なくとも1つの印がプレート上に設けられる。この印は、変形に対する中空構成要素の許容範囲を表す単線の形態であってよい。この点を越えてマーカーが偏向すると、ユーザーは、中空構成要素の変形が許容限度外であることを認識する。次いでユーザーは、中空構成要素が廃棄されるべきかどうか、又は中空構成用が嵌合される/埋め込まれる部位が、更なる準備を必要とするかどうかを決定できる。
装置のフレーム及び細長いインジケータは、同一材料、例えば、可撓性ポリマーから製造されてよい。第1及び/又は第2のアーム対は、フレーム及び細長いインジケータと同じ材料から製造されてよい。各構成要素(フレーム、アーム、及びインジケータ)は、フレームが中空構成要素と共に確実に変形し、アームがインジケータに適切に作用してインジケータの制御された角度偏向をもたらすように、他の構成要素に対して適切な柔軟性を有するように設計され得る。装置が医療用途内での使用を意図する場合、材料は、例えば、高温又は放射線への曝露を伴う、滅菌手順中に曝露されるであろう条件に耐え得るべきである。好適な高分子材料の例としては、ポリエステル、ポリアミド及びポリオレフィン(Solvayが販売するポリフェニルスルホンRadel(登録商標)PPSUなど)、並びにアセタール共重合体(Ticonaが販売するCelcon(登録商標))が挙げられる。
多くの用途では、装置のフレーム及び細長いインジケータを一体として設けることが好適であり得る。多くの用途ではまた、フレーム、細長いインジケータ、及びアーム対のうちの少なくとも1つを一体として設けることが好適である。これは、例えば射出成形など成形技術によって装置の少なくともこれらの部分を製造することによって達成され得る。装置は、単回使用の後の処分が意図されてよい。
いくつかの実施形態において、インジケータは針であり、第1及び第2のアームは、針の長さに沿って離間した点において針に連結される。
装置は、医療装置の構成要素、特に、器具として使用するためのインプラント構成要素又は試験用インプラント構成要素であり得る、整形外科手術において使用される構成要素の変形を検出するために使用できる。装置は、対応する構成要素の凹状ヘッド構成要素を係合して、ヘッド構成要素と中空構成要素との関節接合を可能にすることを意図する、整形外科用人工関節の中空構成要素の変形を検出するために使用できる。これはまた、整形外科手術において使用される試験用中空構成要素の変形を検出するために使用できる。本発明の装置と共に使用できる中空構成要素の例としては、解剖学的人工肩関節を埋め込む外科手術において患者の関節内の空洞に配置するための構成要素(試験用及びインプラント構成要素)、リバース型人工肩関節を埋め込む外科手術において患者の上腕内の空洞に配置するための構成要素(試験用及びインプラント構成要素)が挙げられる。本発明の装置は、人工股関節を埋め込む外科手術において患者の寛骨臼内の空洞内に配置するための構成要素(試験用及びインプラント構成要素)と共に使用するのに特に適している。
任意に、患者の寛骨臼内の空洞内への配置中に構成要素(試験用及びインプラント構成要素)の変形の検出に使用される装置内では、寛骨臼カップ挿入器具を受け入れる寸法の内周を有する内側フレームが装置に設けられる。例えば、内周は、器具のシャフトを受け入れる寸法であり得る。内側フレームは、装置の衝突により器具のシャフトの周りを回転する。これにより、インジケータの角変形が生じる。
内側フレームは、装置の第1のアーム又は第2のアームの一方の構成要素として設けられ得る。例えば、第1のアーム又は第2のアームは、第1の部分及び第2の部分を含んでよく、第1の部分は、内側フレームによって第2の部分から分離される。
内側フレームは、インジケータの構成要素として設けられ得る。例えば、インジケータは、第1の針部と、第2の針部と、を備えてよく、第1の針部及び第2の針部は、内側フレームの対向する点から外方に延びる。
本発明はまた、本発明の装置と、中空構成要素と、を含むキットを提供し、中空構成要素はリムを有し、装置は中空構成要素のリム内にぴったりと嵌合し、フレームはリムと接触する。
装置は、中空構成要素内で予め組み立てられてよい。このため、中空構成要素と共に、適切な装置が確実に使用されるようになる。このため、中空構成要素の配置前に、中空構成要素の内部に装置を取り付ける必要をなくすことができる。
具体的には、キットは、本発明の装置と、整形外科用構成要素と、を含んでよい。構成要素は、人工関節の埋め込み可能な構成要素、例えば、股関節の寛骨臼カップ構成要素、解剖学的人工肩関節の関節構成要素、又はリバース型人工肩関節の上腕骨構成要素であり得る。整形外科用構成要素は、試験用構成要素であってよい。試験用構成要素と共に装置を使用することにより、患者に埋め込むプロテーゼの構成要素の埋め込みよりも前に、外科医は、試験用構成要素を骨内に適切に取り付けられることを確認できる。これにより、最終プロテーゼの不必要な損傷が防止される。試験用構成要素への装着時の装置のインジケータの偏向は、試験用構成要素が誤って取り付けられたか、不適切に取り付けられていることを外科医に強調する。その結果、外科医は、手術部位の追加のリネーミングが必要かどうかを判断できる。
キットは、一連の異なるサイズの整形外科用中空構成要素(試験用又はインプラント構成要素)を含んでよく、各中空構成要素は、内部で予め組み立てられた構成要素の変形を示すための対応する装置を有する。キットは、一連のサイズの寛骨臼カップ構成要素、又は関節カップ構成要素、又は上腕骨カップ構成要素など中空構成要素(試験用又はインプラント構成要素)を含んでよく、各中空構成要素は、内部で予め組み立てられた構成要素の変形を示すための装置を有する。
キットは、一連の異なるサイズの整形外科用中空構成要素(試験用又はインプラント構成要素)と、中空構成要素の変形を示すための、一連の補完装置と、を含んでよい。ユーザーは、適切な装置を選択し、中空構成要素に嵌合させる。
任意に、キットは、第1の装置と、第2の装置と、を含んでよく、各装置は、周囲が不連続であるフレームを有し、第1の装置の第1及び第2のアームの長さは第2の装置の第1及び第2のアームの長さと異なる。第1及び第2の装置は、異なるサイズの中空構成要素における変形を測定するために使用され得る。
本発明はまた、中空構成要素の変形を検出する方法を提供し、この方法は、中空構成要素内に嵌合された装置内の細長いインジケータの角度偏向を検出する工程を含み、この装置は、
可撓性フレームと、
吊り下げ状態でフレームに連結される細長いインジケータであって、フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える。
可撓性フレームと、
吊り下げ状態でフレームに連結される細長いインジケータであって、フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える。
この方法は、品質管理手順の一環として使用されてよい。例えば、この方法は、製造プロセス中に中空構成要素が変形したかどうかを検出するために製造者によって使用されてよい。この方法はまた、中空構成要素の輸送及び/又は保管中に変形が生じたかどうかを検出するために使用されてよい。装置は、中空構成要素内で予め組み立てられてよい。
この方法は、中空構成要素の空洞への挿入中に、中空構成要素の変形が生じたかどうかを検出するために使用されてよい。整形外科用人工関節のカップ構成要素の変形は、検出されないままであれば、重大な臨床的帰結をもたらし得るため、これは、整形外科医にとって特に有用である。したがって、整形外科医は、埋め込み中にカップ構成要素の変形が生じたかどうかを検出する方法を使用し得る。この装置は、人工股関節の寛骨臼構成要素、解剖学的人工肩関節の関節構成要素又はリバース型人工肩関節の上腕骨構成要素の変形を検出するために使用されてよい。整形外科医はまた、人工関節の試験中にこの方法を使用してよい。このような方法では、外科医は、インジケータの偏向のおかげで試験用構成要素の変形を可視化することができ、その結果、手術部位の更なる準備、例えば再リーミングが必要であるかどうかを判断できる。
任意に、装置は、フレームに回転可能に装着され、細長いインジケータによる偏向のために配置され、したがって、装置が中空構成要素内に2方向以上で配置されたときに、細長いインジケータの一連の角度偏向から細長いインジケータの最大の角度偏向を示すマーカーを更に含み、方法は、装置が中空構成要素内に2方向以上で配置されたときに、細長いインジケータの最大の角度偏向を検出する工程を更に含む。
ここで、本発明について、単に一例として、以下の図面を参照して説明する。
非変形状態の中空構成要素の変形を検出するための装置の第1の構造の上面立面図である。
図1の装置の底面立面図である。
図1の装置の側面立面図である。
図1の装置の斜視図である。
図1の装置の領域「A」の拡大図である。
矢印A方向での装置に対する圧縮力の付加を受けて変形した状態の中空構成要素の変形を検出するための図1の装置の上面立面図である。
矢印B方向での装置に対する圧縮力の付加を受けて変形した状態の中空構成要素の変形を検出するための装置の上面立面図である。
非変形状態の中空構成要素の変形を検出するための装置の第2の構造の上面立面図である。
矢印C方向での装置に対する圧縮力の付加を受けて変形した状態の中空構成要素の変形を検出するための図8の装置の上面立面図である。
細長い表示器の最大の角度偏向を示すためのマーカーを含む、装置の第2の構造の上面立面図である。
図10の装置の底面立面図である。
図10の装置の側面立面図である。
非変形状態の中空構成要素の変形を検出するための装置の第3の構造の上面立面図である。装置は、2つのアーム対を有する。第1のアーム対の詳細を示す。
図10に示す装置の第3の構造の上面立面図である。第2のアーム対の詳細を示す。
矢印D及びE方向での装置に対する圧縮力の付加を受けて変形した状態の中空構成要素の変形を検出するための図10の装置の上面立面図である。
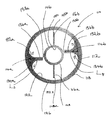
ここで図1〜図7を参照すると、中空構成要素の変形を検出するための装置10が示されている。装置は、フレーム12と、アーム対14a、14bと、針16と、を含む。この装置は、一体として設けられたものとして示す。この構造は、射出成形など成形技術によって装置のこれらの部分を製造することによって達成され得る。
図示した構造のフレーム12は、環状構造を有する。フレーム12は他の形状を有し得るが、フレームの外周18の形状は、嵌合する中空構成要素のリムの内部形状を補完することが有利である。これにより、装置10は、中空構成要素のリムに確実にぴったりと嵌合し、したがって少量の変形を検出できる。フレーム12の外周18は、外壁20によって画定される。フレーム12の内周22は、内壁24によって画定される。
フレーム12は、第1の側26と、対向する第2の側28と、を有する。内壁及び外壁は、第1の側の縁部と第2の側部の縁部との間に延びる。装置の特定の構造において、装置の第1の側26及び第2の側28は同一である。その結果、装置10は、任意の特定の向きで中空構成要素内に挿入される必要がない。これにより、装置は、第1の側26又は第2の側28のいずれかを上向きの(すなわち、ユーザーから視認できる)状態で中空構成要素に挿入できる。
他の構造において、例えば図2に示すように、第1の側26又は第2の側28の少なくとも一方に回転防止機構30が設けられる。図2に示す構造において、回転防止機構30は、第2の側28に分布する複数の突起部の形態をとる。各突起部は、中空構成要素の内面に形成された相補的な機構(例えば、凹部)と嵌合するように構成されている。回転防止機構30は、使用中に装置10が中空構成要素内で回転する能力を阻止する又は有意に制限する。これにより、ユーザーはあらゆる変形の特定の位置を正確に判定できるので有利である。
しかし、場合によっては、針の最大偏向方向を特定するために、中空構成要素内で装置を回転できることがユーザーにとって有利である。これにより、中空構成要素の最大変形領域をユーザーに知らせる。このような場合、ユーザーは、回転防止機構を有さない装置の構造を中空構成要素に挿入できる、又は回転防止機構が装置の片側に設けられている場合、回転防止機構を設けた側が上向きの(すなわち、ユーザーから視認できる)状態で装置を方向付けることができる。
各アーム14a、14bは、フレーム連結端部32a、32bを有する。図示した装置の構造において、各アーム14a、14bのフレーム連結端部32a、32bは、フレア状ネック部34a、34bを介してフレーム12の内周22に連結される。各フレア状ネック部34a、34bは、フレームの内周22とアーム14a、14bの平行な長手方向部36a、36bとの間に延びる、湾曲した外輪郭を有する。フレア状ネック部34a、34bは、フレーム12の内周22とアーム14a、14bの第1の長手方向部36aとを連結する第1の曲率半径(R1)と、フレーム12の内周22とアーム14a、14bの第2の長手方向部36bとを連結する第2の曲率半径(R2)と、を有する。図示した構造において、第1の曲率半径(R1)は、第2の曲率半径(R2)よりも大きい。フレア状ネック部32a、32bは、アームに剛性をもたらす。
各アーム14a、14bは、それぞれ、針連結端部38a、38bを有する。図示した構造において、各アーム14a、14bの針連結端部38a、38bは、装置の変形前に約90°の角度(「θ」、図5を参照)で針16に連結される。しかしながら、アーム14a、14bの一方又はそれぞれと、アーム間に延びる針の部分との角度(θ)は、少なくとも約60°、又は少なくとも約70°、又は少なくとも約80°であり得ることが想定される。概して、この角度は約120°以下、又は約110°以下又は約100°以下である。図5は図1に示す領域「A」の拡大図であり、装置10の変形時にアーム14a、14bと針16との角度の変化を可能にするヒンジ40の設計の詳細を示す。ヒンジ40は、アーム14a、14bの隣接部分よりも薄いアーム14a、14bの部分によって設けられている。図示したヒンジの材料は、各アーム14a、14bの隣接部分の厚みの約1/7の厚さを有する。各アーム14a、14bの薄いヒンジの部分は、片側から観察すると、丸みを帯びており、したがって、装置の変形時にヒンジ40が撓む点において急激な壁厚の変化は生じない。
各アーム14a、14bは、長手方向軸(「L1、L2」、図2を参照)を有する。各アームの長さは、長手方向軸に沿って測定される。長手方向軸(L1、L2)は、フレア状ネック部34a、34bを通って延び、フレーム12の内周22の連続を表す線と交差する。図1〜図7に示す構造において、第1のアーム14aの長さは、第2のアーム14bの長さと等しい。針に沿って測定されるアーム14a、14b間の距離に対する各アームの長さの比率は、約0.15である。この比率は、変形に対する角変位を最大化するために変化し得る。
図1、図2に示すように、第1のアーム14aは、非変形状態において第2アーム14bとほぼ平行である。いくつかの構造において、第1及び第2のアームは、非変形状態においてほぼ平行ではないことが想定される。
針16は、フレーム12を横切って直径方向に延びる。針は自由端42a、42bを有する。図示した構造において、針16の各端部42a、42bは尖っていない。任意に、針16の端部42a、42bのうちの少なくとも1つは尖っていてよい。
ここで図6、図7を参照すると、装置10は非変形状態(濃淡なし)及び変形状態(濃淡あり)の両方で示される。中空構成要素(図示せず)の変形は、針16の偏向として可視化される。これは、人間の眼では検出困難であるものの、臨床的には重要であり得る中空構成要素の少量の変形を検出できるため、有利である。図6及び7は、フレーム12の外周18の変形を示す。装置の外周22が中空構成要素の変形領域に載置されると、フレームの変形が生じる。この変形領域は、フレーム12の外周18に作用する圧縮力を発生させるであろう。これらの圧縮力の方向の例を、矢印「A」、「B」で示す。フレーム12の外周18の変形は、第1及び第2のアーム14a、14bを移動させ、針16を元の位置から角変位させる。図示しないが、ユーザーによる針の偏向量の定量化を可能にする目盛をフレームに設けることができる。これにより、ユーザーは、中空構成要素の特定の変形量に達したか、又はこれを超えたかを判定できる。
ここで図8〜図12を参照すると、中空構成要素の変形を検出するための装置110の第2の構造が示されている。装置は、フレーム112と、アーム対114a、114bと、針116とを備える。この装置は、一体として設けられたものとして示す。この構造は、射出成形など成形技術によって装置のこれらの部分を製造することによって達成され得る。
図示した構造のフレーム112は、環状構造を有する。フレーム112は他の形状を有し得るが、フレームの外周118の形状は、嵌合する中空構成要素のリムの内部形状を補完することが有利である。これにより、装置110は、中空構成要素のリムに確実にぴったりと嵌合し、したがって少量の変形を検出できる。フレーム112の外周118は、外壁(図示せず)によって画定される。フレーム112の内周122は、内壁(図示せず)によって画定される。
フレーム112は、第1の側126と、対向する第2の側(図示せず)と、を有する。内壁及び外壁は、第1の側の縁部と第2の側部の縁部との間に延びる。装置の特定の構造において、装置の第1の側126及び第2の側は同一である。その結果、装置110は、任意の特定の向きで中空構成要素内に挿入される必要がない。これにより、装置は、第1の側126又は第2の側のいずれかを上向きの(すなわち、ユーザーから視認できる)状態で中空構成要素に挿入できる。他の構造において、回転防止機構(図示せず)は、第1の側126又は第2の側の少なくとも一方に設けられる。回転防止機構は、第2の側に分布する複数の突起部の形態をとり得る。各突起部は、中空構成要素の内面に形成された補完的な機構(例えば、凹部)と嵌合するように構成されている。回転防止機構は、使用中に装置110が中空構成要素内で回転する能力を阻止する又は有意に制限する。これにより、ユーザーはあらゆる変形の特定の位置を正確に判定できるので有利である。
各アーム114a、114bは、フレーム連結端部132a、132bを有する。図示した装置の構造において、各アーム114a、114bのフレーム連結端部132a、132bは、フレア状ネック部134a、134bを介してフレーム112の内周122に連結される。各フレア状ネック部134a、134bは、フレームの内周122とアーム114a、114bの平行な長手方向部136a、136bとの間に延びる、湾曲した外輪郭を有する。フレア状ネック部134a、134bは、フレーム112の内周122とアーム114a、114bの第1の長手方向部136aとを連結する第1の曲率半径(R1)と、フレーム112の内周122とアーム114a、114bの第2の長手方向部136bとを連結する第2の曲率半径(R2)と、を有する。図示した構造において、第1の曲率半径(R1)は、第2の曲率半径(R2)よりも大きい。フレア状ネック部132a、132bは、アームに剛性をもたらす。
針116aは、フレーム112を横切って直径方向に延び、内側フレーム146によって分離された第1の部分116a及び第2の部分116bを含む。各針部116a、116bは、内側フレーム146の外周148に対向する側から延びる。図示した構造の内側フレーム146は、環状構造を有する。内側フレーム146は他の形状を有し得るが、内側フレームの内周150の形状が寛骨臼カップインサータ(図示せず)のシャフトの外形を補完することが有利である。内側フレーム146は、好ましくは、十分な剛性を有して、装置への挿入中にフレームがその環状形状を確実に保持できる材料で構成される。これにより、内側フレーム146は、カップインサータの挿入に確実に支障を来さない。針116は自由端142a、142bを有する。図示した構造において、針116の各端部142a、142bは尖っていない。任意に、針116の端部142a、142bのうちの少なくとも1つは尖っていてよい。
各アーム114a、114bは、それぞれ、針連結端部138a、138bを有する。図示した構造において、各アーム114a、114bの針連結端部138a、138bは、内側フレーム146の外周148への連結によって、針116に間接的に連結される。各アーム114a、114bは、装置の変形前に約90°の角度(「θ」、図8を参照)で連結される。しかしながら、アーム114a、114bの一方又はそれぞれと、アームが連結される内側フレーム146の外周148の部分との角度(θ)は、少なくとも約60°、又は少なくとも約70°、又は少なくとも約80°であり得ることが想定される。概して、この角度は約120°以下、又は約110°以下又は約100°以下である。ヒンジ140により、装置110の変形時に、アーム114a、114bとインジケータ116との角度を変化させることができる。ヒンジ140は、アーム114a、114bの隣接部分よりも薄いアーム114a、114bの部分によって設けられている。有利には、各アーム114a、114bの薄いヒンジの部分は、アームを片側から観察すると、丸みを帯びており、したがって、装置の形成時にヒンジ140が撓む点において急激な壁厚の変化は生じない。
各アーム114a、114bは、長手方向軸(「L3、L4」、図8を参照)を有する。各アームの長さは、長手方向軸に沿って測定される。長手方向軸(L3、L4)は、フレア状ネック部134a、134bを通って延び、フレーム112の内周122の連続を表す線と交差する。図8及び図9に示す構造において、第1のアーム114aの長さは、第2のアーム114bの長さと等しい。針に沿って測定されるアーム114a、114b間の距離に対する各アームの長さの比率は、約0.3である。
図8、図9に示すように、第1のアーム114aは、非変形状態において第2のアーム114bとほぼ平行である。
ここで図9を参照すると、装置110は非変形状態(濃淡なし)及び変形状態(濃淡あり)の両方で示される。中空構成要素(図示せず)の変形は、針116の第1の部分116a及び第2の部分116bの偏向として可視化される。これは、人間の眼では検出困難であるものの、臨床的には重要であり得る中空構成要素の少量の変形を検出できるため、有利である。装置の外周122が中空構成要素の変形領域に載置されると、フレームの変形が生じる。この変形領域は、フレーム112の外周118に作用する圧縮力を発生させるであろう。これらの圧縮力の方向の例は、矢印「C」で示される。フレーム112の外周118が変形することにより、第1及び第2のアーム114a、114bが移動する。アーム114a、114bが互いに平行な状態から移動するため、針116はその元の位置から角変位する。図示しないが、ユーザーによる針の偏向量の定量化を可能にする目盛をフレームに設けることができる。これにより、ユーザーは、中空構成要素の特定の変形量に達したか、又はこれを超えたかを判定できる。
図10を再び参照すると、装置110は、マーカー144を含む。マーカーを使用して、装置が中空構成要素内に2方向以上で配置されたときに、生じた針部116bの最大偏向を示すことができる。図示した構造において、マーカー144は、枢動可能な要素である。針部116bとマーカー144は、それぞれ、共通回転軸の周りを回転するように回転可能に装着される。
インジケータは、最狭点150から延びるL字型要素148を備える、概ね涙形の本体146を有する。L字型要素144の第1のアーム160は、涙形の本体146に対して平面である。L字型要素144の第2のアーム162は、針部116bに向かって下方に延びる。
プレート152は、フレームの第3の側154から、フレームの対向する第4の側156まで延びる。プレートは、例えばリベットによってフレームに恒久的に固定されてよい。任意に、プレートは、例えばスナップ嵌め連結によってフレームに取り外し可能に連結できる。これにより、ユーザーは、マーカーを使用するか否かを選択できる。状況によっては、ユーザーは、フレームによって目立たなくされる中空構成要素の内部を見たくなくてもよい。
インジケータは、プレート152の上側に連結される。
プレートは、変形に対する中空構成要素の許容範囲を表す印158(ここでは、線形態で示す)を含む。この点を越えてマーカーが偏向すると、ユーザーは、中空構成要素の変形が許容範囲外であることを認識する。印は、「合格」又は「不合格」など細長いインジケータの角度偏向量を量的に表示できる。他の構造において、印は、針部116bの角度偏向量を量的に表示できる、目盛の形態で設けられてよい。
装置が中空構成要素内に配置されるとき、L字型要素148の第2のアーム部162の側面は、針部116bの側面に概ね当接する。装置が中空構成要素の内面における変形を検出した結果として針部116bが角度偏向すると、第2のアーム部162は、針部116bによって反時計回りに押される。これにより、マーカー144は、第1の(元の)位置から第2の位置に移動する。有利には、マーカーは、自動的にその元の位置に戻るのではなく、ユーザー入力を必要とするように構成されている。これは、例えば、摩擦抵抗又はラチェット機構の結果として実現し得る。
ユーザーが中空構成要素から装置を取り外すと、針部116bは元の位置に戻るが、マーカー144は第2の位置に留まるであろう。ユーザーのみが、マーカーを第1の位置に戻すことができる。
装置は、針部116bの最大偏向を測定するために、ユーザーによって中空構成要素内で回転されてよく、これにより、中空構成要素の全方向での最大変形をユーザーに示す。
針部116bの第2の角度偏向が針部116bの第1の角度偏向よりも大きい場合、マーカー144は、第2の位置から第3の位置まで反時計回り方向に移動する。針部116bの第2の角度偏向が針部116bの第1の角度偏向以下の場合、マーカー144は、第2の位置に留まるであろう。
マーカーは自動的に元の位置に戻らないという事実により、ユーザーは、中空構成要素内で装置を回転させるか、中空構成要素内で装置の取り外しと再配置を繰り返すかのいずれかにより、中空構成要素の内面の周囲の様々な点において中空構成要素の変形を評価できる。このマーカーは、評価中に発生した針部116bの最大偏向をユーザーに示す。これにより、中空構成要素の最大変形をユーザーに表示できる。
図示した構造において、L字型要素148が印158を越えて偏向している場合、ユーザーは、中空構成要素の変形が許容範囲外であることを知る。
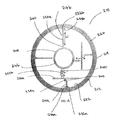
ここで図13〜図15を参照すると、中空構成要素の変形を検出するための装置210の第3の構造が示されている。この装置は、一体として設けられたものとして示す。この構造は、射出成形など成形技術によって装置のこれらの部分を製造することによって達成され得る。
装置は、環状構造を有するように示されたフレーム212を含む。フレーム212は他の形状を有し得るが、フレームの外周218の形状は、嵌合する中空構成要素のリムの内部形状を補完することが有利である。これにより、装置210は、中空構成要素のリムに確実にぴったりと嵌合し、したがって少量の変形を検出できる。フレーム212の外周218は、外壁(図示せず)によって画定される。フレーム212の内周222は、内壁(図示せず)によって画定される。
フレーム212は、第1の側226と、反対側の第2の側(図示せず)と、を有する。内壁及び外壁は、第1の側の縁部と第2の側部の縁部との間に延びる。装置の特定の構造において、装置の第1の側226及び第2の側は同一である。その結果、装置210は、任意の特定の向きで中空構成要素内に挿入される必要がない。これにより、装置は、第1の側226又は第2の側のいずれかを上向きの(すなわち、ユーザーから視認できる)状態で中空構成要素に挿入できる。他の構造において、回転防止機構(図示せず)は、第1の側226又は第2の側の少なくとも一方に設けられる。回転防止機構は、第2の側に分布する複数の突起部の形態をとり得る。各突起部は、中空構成要素の内面に形成された補完的な機構(例えば、凹部)と嵌合するように構成されている。回転防止機構は、使用中に装置210が中空構成要素内で回転する能力を阻止する又は有意に制限する。これにより、ユーザーはあらゆる変形の特定の位置を正確に判定できるので有利である。
装置は、第1のアーム対(214a、214b)と、第2のアーム対(214c、214d)と、を備える。2つのアーム対を設けることにより、装置を回転させずに2つの異なる軸で中空構成要素の変形を検出できる。
図13に示すように、第1のアーム対214a、214bの各アームは、フレーム連結端部232a、232bを有する。図示した装置の構造において、フレーム連結端部232a、232bは、フレア状ネック部234a、234bを介してフレーム212の内周222に連結される。各フレア状ネック部234a、234bは、フレームの内周222と各アーム214a、214bの平行な長手方向部との間に延びる、湾曲した外輪郭を有する。
第1のアーム対214a、214bの第1のアーム214aは、ヒンジ部240を介して針216aにアームを連結する、針連結端部238aを有する。
第1のアーム対214a、214bの第2のアーム214bは、フレーム212の内周222から内方に延び、ヒンジ240を介して内側フレーム246の外周248に連結する第1のアーム部250aを含む。第2のアーム214bはまた、ヒンジ240を介して内側フレーム246の外周248に連結し、内側フレーム246から外方に延びて、ヒンジ240を介して針216aに連結する第2のアーム部250bを含む。第2のアーム214bの第2のアーム部250bは、針216aの長さに沿って離間した点において針216に連結する(これらの点から、第1のアーム214aが針216aに連結する)。
ヒンジ240は、材料のより薄い領域によって形成され得る。有利には、薄いヒンジの領域は、片側から観察すると丸みを帯びており、したがって、装置の変形時にヒンジ240が撓む点において急激な壁厚の変化は生じない。
第1アーム部250a及び第2アーム部250bは、長手方向軸(「L5、L6」)をそれぞれ有する。図10に示す実施形態において、第1のアーム部250a及び第2のアーム部250bは、L5、L6が互いからオフセットするように、内側フレーム246に連結される。例えば、第1の部分250aの長手方向軸L5及び第2の部分250bの長手方向軸L6が互いに揃うように、これらが内側フレーム246に連結されるなど他の構造が想定される。
各アーム214a、214bは、装置の変形前に約90°の角度(「θ」)で針216aに連結される。しかしながら、アーム214a、214bの一方又はそれぞれと針216aとの角度(θ)は、少なくとも約60°、又は少なくとも約70°、又は少なくとも約80°であり得ることが想定される。概して、この角度は約120°以下、又は約110°以下又は約100°以下である。
図13に示すような装置の第3の構造にはまた、第2のアーム対が設けられる。第2のアーム対の詳細は、図11を参照して示す。第2のアーム対は、第1のアーム対と同一である。第3の構造において、アームの第1の部分の針と第2のアーム対の針との角度(「θ」)は、約90°である。これにより、直交する2軸における装置の変形を検出できる。
第2のアーム対214c、214dの第1のアーム214cは、ヒンジ部240を介して針216bにアームを連結する、針連結端部238cを有する。
第2のアーム対214c、214dの第2のアーム214dは、フレーム212の内周222から内方に延び、ヒンジ240を介して内側フレーム246に連結する第1のアーム部248cを含む。第2のアーム214dはまた、ヒンジ240を介して内側フレーム246に連結し、内側フレーム246から外方に延びて、ヒンジ240を介して針216bに連結する第2のアーム部248dを含む。第2のアーム214dの第2のアーム部248dは、針216aの長さに沿って離間した点において針216に連結する(これらの点から、第1のアーム214cが針216bに連結する)。
ヒンジ240は、材料のより薄い領域によって形成され得る。有利には、薄いヒンジの領域は、片側から観察すると丸みを帯びており、したがって、装置の変形時にヒンジ240が撓む点において急激な壁厚の変化は生じない。
第1のアーム部248c及び第2のアーム部248dは、長手方向軸(「L7、L8」)をそれぞれ有する。図14に示す構造において、第1のアーム部248c及び第2のアーム部248dは、L7、L8が互いからオフセットするように、内側フレーム246に連結される。例えば、第1の部分248aの長手方向軸L7及び第2の部分248bの長手方向軸L7が互いに揃うように、これらが内側フレーム212に連結されるなど他の構造が想定される。
各アーム214c、214dは、装置の変形前に約90°の角度(「θ」)で針216bに連結される。しかしながら、アーム214c、214dの一方又はそれぞれと、アームが連結される内側フレーム246の外周148の部分との角度(θ)は、少なくとも約60°、又は少なくとも約70°、又は少なくとも約80°であり得ることが想定される。概して、この角度は約120°以下、又は約110°以下又は約100°以下である。
図13〜15に示した構造の内側フレーム246は、環状構造を有する。内側フレーム246は他の形状を有し得るが、内側フレームの内周250の形状が寛骨臼カップインサータ(図示せず)のシャフトの外形を補完することが有利である。内側フレーム246は、好ましくは、十分な剛性を有して、使用中にフレームがその形状を保持できる材料で構成される。これにより、内側フレームは、カップインサータの挿入に確実に支障を来さない。
ここで図15を参照すると、装置210は非変形状態(濃淡なし)及び変形状態(濃淡あり)の両方で示される。中空構成要素(図示せず)の変形は、第1の針216a及び/又は第2の針216bの偏向として可視化される。これは、人間の眼では検出困難であるものの、臨床的には重要であり得る中空構成要素の少量の変形を検出できるため、有利である。装置の外周218が中空構成要素の変形領域に載置されると、フレームの変形が生じる。この変形領域は、フレーム212の外周218に作用する圧縮力を発生させるであろう。これらの圧縮力の方向の例は、矢印「D」、「E」で示される。
矢印D方向の圧縮力によるフレーム212の外周218の変形の結果、第1のアーム対の第1のアーム214a及び第2のアーム214bが移動する。アーム214a、214bが互いに平行な状態から移動するため、針116aはその元の位置から角変位する。図示しないが、ユーザーによる針の偏向量の定量化を可能にする目盛をフレームに設けることができる。これにより、ユーザーは、中空構成要素の特定の変形量に達したか、又はこれを超えたかを判定できる。
矢印E方向の圧縮力によるフレーム212の外周218の変形の結果、第2のアーム対の第1のアーム214c及び第2のアーム214dが移動する。アーム214c、214dが互いに平行な状態から移動するため、針116bはその元の位置から角変位する。図示しないが、ユーザーによる針の偏向量の定量化を可能にする目盛をフレームに設けることができる。これにより、ユーザーは、中空構成要素の特定の変形量に達したか、又はこれを超えたかを判定できる。
〔実施の態様〕
(1) 中空構成要素の変形を示すために前記中空構成要素に嵌合するための装置であって、
フレームと、
吊り下げ状態で前記フレームに連結される細長いインジケータであって、前記フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える、装置。
(2) アーム対であって、第1のアームが前記フレームの第1の側の第1の点から内方に延び、第2のアームが前記フレームの第2の側の第2の点から内方に延び、前記第2の側が前記第1の側に対向している、アーム対を更に備え、
前記細長いインジケータは、長手方向軸を有し、前記第1のアーム及び前記第2のアームが、前記軸に沿って離間した点において前記長手方向軸に連結されて、吊り下げ状態で前記細長いインジケータを前記フレームに連結し、
前記フレームの変形によって生じる前記フレームの両側の前記第1の点と前記第2の点との間の距離の変化が、前記インジケータの角度偏向をもたらす、実施態様1に記載の装置。
(3) 前記インジケータが針であり、前記第1のアーム及び前記第2のアームが、前記針の長さに沿って離間した点において前記針に連結されている、実施態様2に記載の装置。
(4) 吊り下げ状態で前記フレームに連結される第2の細長いインジケータを更に備え、前記細長いインジケータが前記フレームの変形の結果として偏向するように配置されている、実施態様1〜3のいずれかに記載の装置。
(5) 前記装置が、
第2のアーム対であって、第3のアームが前記フレームの第3の側の第3の点から内方に延び、第4のアームが前記フレームの第4の側の第4の点から内方に延び、前記第4の側が前記第3の側に対向している、第2のアーム対を更に備え、
前記第2の細長いインジケータは、長手方向軸を有し、前記第3のアーム及び前記第4のアームが、前記軸に沿って離間した点において前記長手方向軸に連結されて、吊り下げ状態で前記第2の細長いインジケータを前記フレームに連結し、
前記フレームの変形によって生じる前記フレームの両側の前記第3の点と前記第4の点との間の距離の変化が、前記インジケータの角度偏向をもたらす、実施態様4に記載の装置。
(1) 中空構成要素の変形を示すために前記中空構成要素に嵌合するための装置であって、
フレームと、
吊り下げ状態で前記フレームに連結される細長いインジケータであって、前記フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える、装置。
(2) アーム対であって、第1のアームが前記フレームの第1の側の第1の点から内方に延び、第2のアームが前記フレームの第2の側の第2の点から内方に延び、前記第2の側が前記第1の側に対向している、アーム対を更に備え、
前記細長いインジケータは、長手方向軸を有し、前記第1のアーム及び前記第2のアームが、前記軸に沿って離間した点において前記長手方向軸に連結されて、吊り下げ状態で前記細長いインジケータを前記フレームに連結し、
前記フレームの変形によって生じる前記フレームの両側の前記第1の点と前記第2の点との間の距離の変化が、前記インジケータの角度偏向をもたらす、実施態様1に記載の装置。
(3) 前記インジケータが針であり、前記第1のアーム及び前記第2のアームが、前記針の長さに沿って離間した点において前記針に連結されている、実施態様2に記載の装置。
(4) 吊り下げ状態で前記フレームに連結される第2の細長いインジケータを更に備え、前記細長いインジケータが前記フレームの変形の結果として偏向するように配置されている、実施態様1〜3のいずれかに記載の装置。
(5) 前記装置が、
第2のアーム対であって、第3のアームが前記フレームの第3の側の第3の点から内方に延び、第4のアームが前記フレームの第4の側の第4の点から内方に延び、前記第4の側が前記第3の側に対向している、第2のアーム対を更に備え、
前記第2の細長いインジケータは、長手方向軸を有し、前記第3のアーム及び前記第4のアームが、前記軸に沿って離間した点において前記長手方向軸に連結されて、吊り下げ状態で前記第2の細長いインジケータを前記フレームに連結し、
前記フレームの変形によって生じる前記フレームの両側の前記第3の点と前記第4の点との間の距離の変化が、前記インジケータの角度偏向をもたらす、実施態様4に記載の装置。
(6) 前記第3のアーム及び前記第4のアームの一方が第1のアーム部及び第2のアーム部を備え、前記第2のアーム部が、内側フレームによって前記第1のアーム部から分離している、実施態様5に記載の装置。
(7) 前記第1のアーム及び前記第2のアームの一方が第1のアーム部及び第2のアーム部を備え、前記第1のアーム部が、内側フレームによって前記第2のアーム部から分離している、実施態様2に記載の装置。
(8) 前記インジケータが、第1の針部と、第2の針部と、前記第1の針部及び前記第2の針部が対向する点から外方に延びる内側フレームと、を備える、実施態様1に記載の装置。
(9) 前記アーム対の前記アームのそれぞれが、前記フレームの非変形時に互いにほぼ平行である、実施態様2〜8のいずれかに記載の装置。
(10) 前記アーム対の前記アームのそれぞれと前記針との間の角度が、前記装置の非変形時に約90°である、実施態様2〜9のいずれかに記載の装置。
(7) 前記第1のアーム及び前記第2のアームの一方が第1のアーム部及び第2のアーム部を備え、前記第1のアーム部が、内側フレームによって前記第2のアーム部から分離している、実施態様2に記載の装置。
(8) 前記インジケータが、第1の針部と、第2の針部と、前記第1の針部及び前記第2の針部が対向する点から外方に延びる内側フレームと、を備える、実施態様1に記載の装置。
(9) 前記アーム対の前記アームのそれぞれが、前記フレームの非変形時に互いにほぼ平行である、実施態様2〜8のいずれかに記載の装置。
(10) 前記アーム対の前記アームのそれぞれと前記針との間の角度が、前記装置の非変形時に約90°である、実施態様2〜9のいずれかに記載の装置。
(11) 前記アーム対の前記アームのそれぞれと前記針との間にヒンジが設けられている、実施態様2〜10のいずれかに記載の装置。
(12) 前記アーム対の前記アームのそれぞれと前記針との間の前記ヒンジのそれぞれが、前記アームの局所的に薄い部分によって設けられている、実施態様11に記載の装置。
(13) 前記ヒンジのそれぞれは、前記アームが前記針に連結されている、対応のアームの端部に設けられている、実施態様11又は実施態様12に記載の装置。
(14) 前記フレームが、前記装置の周囲で連続している、実施態様1〜13のいずれかに記載の装置。
(15) 前記フレームが円形である、実施態様14に記載の装置。
(12) 前記アーム対の前記アームのそれぞれと前記針との間の前記ヒンジのそれぞれが、前記アームの局所的に薄い部分によって設けられている、実施態様11に記載の装置。
(13) 前記ヒンジのそれぞれは、前記アームが前記針に連結されている、対応のアームの端部に設けられている、実施態様11又は実施態様12に記載の装置。
(14) 前記フレームが、前記装置の周囲で連続している、実施態様1〜13のいずれかに記載の装置。
(15) 前記フレームが円形である、実施態様14に記載の装置。
(16) 前記インジケータの偏向量を示すために前記フレーム上に印を含む、実施態様14又は15に記載の装置。
(17) 前記装置がマーカーを更に含み、前記マーカーは、前記フレームに回転可能に装着され、前記細長いインジケータによる偏向のために配置されることによって、前記装置が前記中空構成要素内に2方向以上で配置されたときに、前記細長いインジケータの一連の角度偏向から前記細長いインジケータの最大の角度偏向を示す、実施態様1〜16のいずれかに記載の装置。
(18) 前記マーカーが、前記細長いインジケータの第1の角度偏向に応答して第1の位置から第2の位置に角度偏向し、前記第1の位置に自動的に戻らず、前記細長いインジケータの第2の角度偏向が前記第1の角度偏向よりも大きい場合、前記第2の角度偏向に応答して前記第2の位置から第3の位置に角度偏向する、実施態様17に記載の装置。
(19) 前記細長いインジケータ及び前記マーカーが、それぞれ、共通回転軸の周りを回転するために回転可能に装着されている、実施態様17又は18に記載の装置。
(20) 前記装置が、前記フレーム上の前記第1の点と前記第2の点との間に延びるプレートを更に含み、前記マーカーが前記プレートに連結されている、実施態様17〜19のいずれかに記載の装置。
(17) 前記装置がマーカーを更に含み、前記マーカーは、前記フレームに回転可能に装着され、前記細長いインジケータによる偏向のために配置されることによって、前記装置が前記中空構成要素内に2方向以上で配置されたときに、前記細長いインジケータの一連の角度偏向から前記細長いインジケータの最大の角度偏向を示す、実施態様1〜16のいずれかに記載の装置。
(18) 前記マーカーが、前記細長いインジケータの第1の角度偏向に応答して第1の位置から第2の位置に角度偏向し、前記第1の位置に自動的に戻らず、前記細長いインジケータの第2の角度偏向が前記第1の角度偏向よりも大きい場合、前記第2の角度偏向に応答して前記第2の位置から第3の位置に角度偏向する、実施態様17に記載の装置。
(19) 前記細長いインジケータ及び前記マーカーが、それぞれ、共通回転軸の周りを回転するために回転可能に装着されている、実施態様17又は18に記載の装置。
(20) 前記装置が、前記フレーム上の前記第1の点と前記第2の点との間に延びるプレートを更に含み、前記マーカーが前記プレートに連結されている、実施態様17〜19のいずれかに記載の装置。
(21) 前記プレートが、前記マーカーの前記角度偏向を示すための印を含む、実施態様20に記載の装置。
(22) 前記フレーム及び前記インジケータが合わせて一体成形されている、実施態様1〜21のいずれかに記載の装置。
(23) 実施態様1〜22のいずれかに記載の装置と、中空構成要素と、を備えるキットであって、前記中空構成要素がリムを有し、前記装置が前記中空構成要素の前記リム内にぴったりと嵌合し、前記フレームが前記リムと接触している、キット。
(24) 前記装置が前記中空構成要素内で予め組み立てられている、実施態様23に記載のキット。
(25) 前記中空構成要素が整形外科用構成要素である、実施態様23又は24に記載のキット。
(22) 前記フレーム及び前記インジケータが合わせて一体成形されている、実施態様1〜21のいずれかに記載の装置。
(23) 実施態様1〜22のいずれかに記載の装置と、中空構成要素と、を備えるキットであって、前記中空構成要素がリムを有し、前記装置が前記中空構成要素の前記リム内にぴったりと嵌合し、前記フレームが前記リムと接触している、キット。
(24) 前記装置が前記中空構成要素内で予め組み立てられている、実施態様23に記載のキット。
(25) 前記中空構成要素が整形外科用構成要素である、実施態様23又は24に記載のキット。
(26) 前記整形外科用構成要素が、外科手術において患者の寛骨臼内の空洞内に配置して、人工股関節を埋め込むためのものである、実施態様25に記載のキット。
(27) それぞれ実施態様2〜22のいずれかに記載の第1の装置及び第2の装置を備えるキットであって、前記第1の装置の前記第1のアーム対の長さが、前記第2の装置の前記第1のアーム対の長さとは異なる、キット。
(28) 中空構成要素の変形を検出する方法であって、前記方法が、前記中空構成要素内に嵌合された装置内の細長いインジケータの角度偏向を検出する工程を含み、前記装置が、
可撓性フレームと、
吊り下げ状態で前記フレームに連結される細長いインジケータであって、前記フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える、方法。
(29) 前記フレームの前記変形が、前記中空構成要素の空洞への挿入中に生じる、実施態様28に記載の方法。
(30) 前記フレームの前記変形が、前記中空構成要素の製造、輸送、又は保管中に生じる、実施態様28に記載の方法。
(27) それぞれ実施態様2〜22のいずれかに記載の第1の装置及び第2の装置を備えるキットであって、前記第1の装置の前記第1のアーム対の長さが、前記第2の装置の前記第1のアーム対の長さとは異なる、キット。
(28) 中空構成要素の変形を検出する方法であって、前記方法が、前記中空構成要素内に嵌合された装置内の細長いインジケータの角度偏向を検出する工程を含み、前記装置が、
可撓性フレームと、
吊り下げ状態で前記フレームに連結される細長いインジケータであって、前記フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える、方法。
(29) 前記フレームの前記変形が、前記中空構成要素の空洞への挿入中に生じる、実施態様28に記載の方法。
(30) 前記フレームの前記変形が、前記中空構成要素の製造、輸送、又は保管中に生じる、実施態様28に記載の方法。
(31) 前記中空構成要素が、整形外科用人工関節の構成要素である、実施態様28〜30のいずれかに記載の方法。
(32) 前記整形外科用構成要素が、人工股関節の寛骨臼カップ構成要素である、実施態様31に記載の方法。
(33) 前記装置が、患者の寛骨臼への前記寛骨臼カップの埋め込みより前に、前記寛骨臼カップ内に嵌合されている、実施態様32に記載の方法。
(34) 前記装置がマーカーを更に含み、前記マーカーは、前記フレームに回転可能に装着され、前記細長いインジケータによる偏向のために配置されることによって、前記装置が前記中空構成要素内に2方向以上で配置されたときに、前記細長いインジケータの一連の角度偏向から前記細長いインジケータの最大の角度偏向を示し、前記方法は、前記装置が前記中空構成要素内に2方向以上で配置されたときに、前記細長いインジケータの前記最大の角度偏向を検出する工程を更に含む、実施態様28〜33のいずれかに記載の方法。
(32) 前記整形外科用構成要素が、人工股関節の寛骨臼カップ構成要素である、実施態様31に記載の方法。
(33) 前記装置が、患者の寛骨臼への前記寛骨臼カップの埋め込みより前に、前記寛骨臼カップ内に嵌合されている、実施態様32に記載の方法。
(34) 前記装置がマーカーを更に含み、前記マーカーは、前記フレームに回転可能に装着され、前記細長いインジケータによる偏向のために配置されることによって、前記装置が前記中空構成要素内に2方向以上で配置されたときに、前記細長いインジケータの一連の角度偏向から前記細長いインジケータの最大の角度偏向を示し、前記方法は、前記装置が前記中空構成要素内に2方向以上で配置されたときに、前記細長いインジケータの前記最大の角度偏向を検出する工程を更に含む、実施態様28〜33のいずれかに記載の方法。
Claims (34)
- 中空構成要素の変形を示すために前記中空構成要素に嵌合するための装置であって、
フレームと、
吊り下げ状態で前記フレームに連結される細長いインジケータであって、前記フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える、装置。 - アーム対であって、第1のアームが前記フレームの第1の側の第1の点から内方に延び、第2のアームが前記フレームの第2の側の第2の点から内方に延び、前記第2の側が前記第1の側に対向している、アーム対を更に備え、
前記細長いインジケータは、長手方向軸を有し、前記第1のアーム及び前記第2のアームが、前記軸に沿って離間した点において前記長手方向軸に連結されて、吊り下げ状態で前記細長いインジケータを前記フレームに連結し、
前記フレームの変形によって生じる前記フレームの両側の前記第1の点と前記第2の点との間の距離の変化が、前記インジケータの角度偏向をもたらす、請求項1に記載の装置。 - 前記インジケータが針であり、前記第1のアーム及び前記第2のアームが、前記針の長さに沿って離間した点において前記針に連結されている、請求項2に記載の装置。
- 吊り下げ状態で前記フレームに連結される第2の細長いインジケータを更に備え、前記細長いインジケータが前記フレームの変形の結果として偏向するように配置されている、請求項1〜3のいずれか一項に記載の装置。
- 前記装置が、
第2のアーム対であって、第3のアームが前記フレームの第3の側の第3の点から内方に延び、第4のアームが前記フレームの第4の側の第4の点から内方に延び、前記第4の側が前記第3の側に対向している、第2のアーム対を更に備え、
前記第2の細長いインジケータは、長手方向軸を有し、前記第3のアーム及び前記第4のアームが、前記軸に沿って離間した点において前記長手方向軸に連結されて、吊り下げ状態で前記第2の細長いインジケータを前記フレームに連結し、
前記フレームの変形によって生じる前記フレームの両側の前記第3の点と前記第4の点との間の距離の変化が、前記インジケータの角度偏向をもたらす、請求項4に記載の装置。 - 前記第3のアーム及び前記第4のアームの一方が第1のアーム部及び第2のアーム部を備え、前記第2のアーム部が、内側フレームによって前記第1のアーム部から分離している、請求項5に記載の装置。
- 前記第1のアーム及び前記第2のアームの一方が第1のアーム部及び第2のアーム部を備え、前記第1のアーム部が、内側フレームによって前記第2のアーム部から分離している、請求項2に記載の装置。
- 前記インジケータが、第1の針部と、第2の針部と、前記第1の針部及び前記第2の針部が対向する点から外方に延びる内側フレームと、を備える、請求項1に記載の装置。
- 前記アーム対の前記アームのそれぞれが、前記フレームの非変形時に互いにほぼ平行である、請求項2〜8のいずれか一項に記載の装置。
- 前記アーム対の前記アームのそれぞれと前記針との間の角度が、前記装置の非変形時に約90°である、請求項2〜9のいずれか一項に記載の装置。
- 前記アーム対の前記アームのそれぞれと前記針との間にヒンジが設けられている、請求項2〜10のいずれか一項に記載の装置。
- 前記アーム対の前記アームのそれぞれと前記針との間の前記ヒンジのそれぞれが、前記アームの局所的に薄い部分によって設けられている、請求項11に記載の装置。
- 前記ヒンジのそれぞれは、前記アームが前記針に連結されている、対応のアームの端部に設けられている、請求項11又は請求項12に記載の装置。
- 前記フレームが、前記装置の周囲で連続している、請求項1〜13のいずれか一項に記載の装置。
- 前記フレームが円形である、請求項14に記載の装置。
- 前記インジケータの偏向量を示すために前記フレーム上に印を含む、請求項14又は15に記載の装置。
- 前記装置がマーカーを更に含み、前記マーカーは、前記フレームに回転可能に装着され、前記細長いインジケータによる偏向のために配置されることによって、前記装置が前記中空構成要素内に2方向以上で配置されたときに、前記細長いインジケータの一連の角度偏向から前記細長いインジケータの最大の角度偏向を示す、請求項1〜16のいずれか一項に記載の装置。
- 前記マーカーが、前記細長いインジケータの第1の角度偏向に応答して第1の位置から第2の位置に角度偏向し、前記第1の位置に自動的に戻らず、前記細長いインジケータの第2の角度偏向が前記第1の角度偏向よりも大きい場合、前記第2の角度偏向に応答して前記第2の位置から第3の位置に角度偏向する、請求項17に記載の装置。
- 前記細長いインジケータ及び前記マーカーが、それぞれ、共通回転軸の周りを回転するために回転可能に装着されている、請求項17又は18に記載の装置。
- 前記装置が、前記フレーム上の前記第1の点と前記第2の点との間に延びるプレートを更に含み、前記マーカーが前記プレートに連結されている、請求項17〜19のいずれか一項に記載の装置。
- 前記プレートが、前記マーカーの前記角度偏向を示すための印を含む、請求項20に記載の装置。
- 前記フレーム及び前記インジケータが合わせて一体成形されている、請求項1〜21のいずれか一項に記載の装置。
- 請求項1〜22のいずれか一項に記載の装置と、中空構成要素と、を備えるキットであって、前記中空構成要素がリムを有し、前記装置が前記中空構成要素の前記リム内にぴったりと嵌合し、前記フレームが前記リムと接触している、キット。
- 前記装置が前記中空構成要素内で予め組み立てられている、請求項23に記載のキット。
- 前記中空構成要素が整形外科用構成要素である、請求項23又は24に記載のキット。
- 前記整形外科用構成要素が、外科手術において患者の寛骨臼内の空洞内に配置して、人工股関節を埋め込むためのものである、請求項25に記載のキット。
- それぞれ請求項2〜22のいずれか一項に記載の第1の装置及び第2の装置を備えるキットであって、前記第1の装置の前記第1のアーム対の長さが、前記第2の装置の前記第1のアーム対の長さとは異なる、キット。
- 中空構成要素の変形を検出する方法であって、前記方法が、前記中空構成要素内に嵌合された装置内の細長いインジケータの角度偏向を検出する工程を含み、前記装置が、
可撓性フレームと、
吊り下げ状態で前記フレームに連結される細長いインジケータであって、前記フレームの変形の結果として偏向するように配置されている、細長いインジケータと、を備える、方法。 - 前記フレームの前記変形が、前記中空構成要素の空洞への挿入中に生じる、請求項28に記載の方法。
- 前記フレームの前記変形が、前記中空構成要素の製造、輸送、又は保管中に生じる、請求項28に記載の方法。
- 前記中空構成要素が、整形外科用人工関節の構成要素である、請求項28〜30のいずれか一項に記載の方法。
- 前記整形外科用構成要素が、人工股関節の寛骨臼カップ構成要素である、請求項31に記載の方法。
- 前記装置が、患者の寛骨臼への前記寛骨臼カップの埋め込みより前に、前記寛骨臼カップ内に嵌合されている、請求項32に記載の方法。
- 前記装置がマーカーを更に含み、前記マーカーは、前記フレームに回転可能に装着され、前記細長いインジケータによる偏向のために配置されることによって、前記装置が前記中空構成要素内に2方向以上で配置されたときに、前記細長いインジケータの一連の角度偏向から前記細長いインジケータの最大の角度偏向を示し、前記方法は、前記装置が前記中空構成要素内に2方向以上で配置されたときに、前記細長いインジケータの前記最大の角度偏向を検出する工程を更に含む、請求項28〜33のいずれか一項に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1522723.4 | 2015-12-23 | ||
| GBGB1522723.4A GB201522723D0 (en) | 2015-12-23 | 2015-12-23 | Device for detecting deformation of a hollow component |
| PCT/EP2016/081709 WO2017108673A1 (en) | 2015-12-23 | 2016-12-19 | Device for detecting deformation of a hollow component |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018538104A true JP2018538104A (ja) | 2018-12-27 |
| JP2018538104A5 JP2018538104A5 (ja) | 2019-11-28 |
Family
ID=55311496
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018533115A Abandoned JP2018538104A (ja) | 2015-12-23 | 2016-12-19 | 中空構成要素の変形検出装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20190003831A1 (ja) |
| EP (1) | EP3393375A1 (ja) |
| JP (1) | JP2018538104A (ja) |
| CN (1) | CN108472050A (ja) |
| AU (1) | AU2016375429A1 (ja) |
| GB (1) | GB201522723D0 (ja) |
| WO (1) | WO2017108673A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108369146B (zh) * | 2015-10-28 | 2020-09-18 | 伊利诺斯工具制品有限公司 | 测力装置 |
| CN109612867B (zh) * | 2018-11-22 | 2021-10-29 | 中国科学院理化技术研究所 | 材料尺寸稳定性的评价方法及系统 |
| CN115900509B (zh) * | 2023-03-03 | 2023-04-28 | 山东柏远复合材料科技股份有限公司 | 一种圆形缸筒变形度检测工装 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2400200A (en) * | 1998-12-31 | 2000-07-31 | Ball Semiconductor Inc. | Miniature implanted orthopedic sensors |
| DE29904442U1 (de) * | 1999-03-11 | 1999-05-12 | Kutsch Gmbh M | Vorrichtung zum Schutz von Längsträgern von Kraftfahrzeugen gegen crashbedingte Deformation |
| US7660623B2 (en) * | 2003-01-30 | 2010-02-09 | Medtronic Navigation, Inc. | Six degree of freedom alignment display for medical procedures |
| WO2006136954A1 (en) * | 2005-06-03 | 2006-12-28 | Depuy Ireland Limited | Instrument for use in a joint replacement procedure |
| FR2892014B1 (fr) * | 2005-10-19 | 2008-06-20 | Implant Reduction Eurl Entpr U | Cupule pour implant cotyloidien |
| EP1795869A1 (en) * | 2005-12-09 | 2007-06-13 | Nederlandse Organisatie voor toegepast-natuurwetenschappelijk Onderzoek TNO | Device for determining deformation in a bearing roller |
| JP2009288198A (ja) * | 2008-05-30 | 2009-12-10 | Sony Corp | トルク計測装置並びにアクチュエータ駆動制御システム |
| GB0900830D0 (en) * | 2009-01-20 | 2009-03-04 | Depuy Int Ltd | Orientation guide |
| CH705783A1 (de) * | 2011-11-18 | 2013-05-31 | Kistler Holding Ag | WIM Hohlprofil. |
| US20150297362A1 (en) * | 2012-11-02 | 2015-10-22 | Polaris Surgical Llc | Systems and methods for measuring orthopedic parameters in arthroplastic procedures |
| US9308102B2 (en) * | 2013-03-04 | 2016-04-12 | Howmedica Osteonics Corp. | Acetabular cup positioning device |
| DE202014009315U1 (de) * | 2014-11-24 | 2014-12-18 | Siemens Aktiengesellschaft | Medizinisches Untersuchungs- und/oder Behandlungsgerät |
| CN108369146B (zh) * | 2015-10-28 | 2020-09-18 | 伊利诺斯工具制品有限公司 | 测力装置 |
-
2015
- 2015-12-23 GB GBGB1522723.4A patent/GB201522723D0/en not_active Ceased
-
2016
- 2016-12-19 AU AU2016375429A patent/AU2016375429A1/en not_active Abandoned
- 2016-12-19 WO PCT/EP2016/081709 patent/WO2017108673A1/en unknown
- 2016-12-19 US US16/064,482 patent/US20190003831A1/en not_active Abandoned
- 2016-12-19 JP JP2018533115A patent/JP2018538104A/ja not_active Abandoned
- 2016-12-19 CN CN201680075599.2A patent/CN108472050A/zh active Pending
- 2016-12-19 EP EP16813233.0A patent/EP3393375A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| AU2016375429A1 (en) | 2018-05-31 |
| US20190003831A1 (en) | 2019-01-03 |
| CN108472050A (zh) | 2018-08-31 |
| EP3393375A1 (en) | 2018-10-31 |
| GB201522723D0 (en) | 2016-02-03 |
| WO2017108673A1 (en) | 2017-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2268191B1 (en) | Systems for ocular measurements | |
| EP2139379B1 (en) | Angle indicator for capsular bag size measurement | |
| CA2849311C (en) | System and method for precise prosthesis positioning in hip arthroplasty | |
| US7458989B2 (en) | Intraoperative joint force measuring device, system and method | |
| US10426635B2 (en) | Medical force measuring system | |
| JP2018538104A (ja) | 中空構成要素の変形検出装置 | |
| US20060074353A1 (en) | Glenoid instrumentation and associated method | |
| JP2004202234A (ja) | モジュラー股関節ステム及びそれを試用するための方法 | |
| US8926532B2 (en) | Goniometer | |
| US20230009959A1 (en) | Measuring equipment for use in connection with hip prosthesis surgery | |
| US9474614B2 (en) | Acetabular components with radiological markers for a hip replacement implant | |
| US20200289292A1 (en) | Anatomic Shell 2-in-1 Window Trial | |
| US20050000104A1 (en) | Acetabular measuring device | |
| CN113164261A (zh) | 膝关节内假体-套件和仪器总成 | |
| CA2719935A1 (en) | Systems for ocular measurements |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191018 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191018 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20200305 |